ОБЛАСТЬ ТЕХНИКИ
Группа изобретений относится к медицинской технике, а именно к способам и устройствам определения положения и ориентации стопы экзоскелета относительно опорной поверхности и фазы движения ножной опоры экзоскелета, ортеза или протеза, а также к конструктивным особенностям выполнения стопы экзоскелета, ортеза или протеза, позволяющим определять положение и ориентацию стопы и фазу движения ножной опоры экзоскелета, ортеза или протеза.
Изобретения обеспечивают возможность определять положение и ориентацию стопы относительно опорной поверхности и текущую фазу движения ножной опоры экзоскелета, ортеза или протеза.
УРОВЕНЬ ТЕХНИКИ
При построении систем управления движением экзоскелетов, ортезов или протезов учитывают данные, в том числе и о текущих значениях кинематических и динамических параметров движения их звеньев [US 8057410 В2 публ. 15.11.2011], о кинематических и динамических параметрах движения и масс - инерционных характеристиках звеньев, присоединенных к соответствующим сегментам ног пользователя [RU 2364385 публ. 20.08.2009], и в том числе о текущих параметрах движения их стопы относительно опорной поверхности [US 9211201 В2 публ. 15.12.2015], [US 9351856 В2 публ. 31.05.2016], [US 9221177 В2 публ. 29.12.2016] и [Вукобратович М. Шагающие роботы и антропоморфные механизмы. - М.: Мир, 1976.].
Движение стопы пользователя экзоскелета в процессе его перемещения относительно опорной поверхности можно охарактеризовать совокупностью ряда текущих параметров движения подошвенной пластины стопы экзоскелета, опорный элемент которой интегрирован с башмаком пользователя экзоскелета. Эти параметры определяются как для безопорного движения, так и для движения, при котором в результате изменения положения стопы экзоскелета осуществляется контакт интегрированной стопы с опорной поверхностью и возникает обусловленное этим контактом силовое взаимодействие интегрированной стопы экзоскелета с опорной поверхностью.
В общем случае движение стопы ножной опоры экзоскелета относительно опорной поверхности определяют следующие текущие параметры:
- расстояния от заранее выбранных точки или точек наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности;
- углы наклона наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета относительно опорной поверхности;
- силы реакции опоры в вертикальном и продольном направлении для заранее выбранных точки или точек наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета,
Совокупность вышеперечисленных параметров, характеризующих безопорное движение стопы экзоскелета и/или движение стопы при наличии контакта стопы с опорной поверхностью, позволяет также определить текущую фазу движения ножной опоры экзоскелета.
При этом такие из вышеперечисленных параметров движения стопы экзоскелета как расстояния, углы наклона и силы реакции опоры определяют количественно, а текущие фазы движения ножной опоры экзоскелета - качественно.
Известен способ определения данных о текущих параметрах движения стопы относительно опорной поверхности при помощи интегрированной стопы экзоскелета, выполненной с возможностью присоединения к голеностопному шарнирному сочленения экзоскелета и проведения измерений данных двумя датчиками, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, и с подошвенной пластиной интегрированной стопы, выполненной с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, включающий проведение указанных измерений [US 8057410 В2 публ. 15.11.2011].
В данном способе осуществляют измерение только таких данных о текущих параметрах движения стопы относительно опорной поверхности, которые не позволяют определять такие параметры как расстояния от заранее выбранных точки или точек наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности и углы наклона наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета относительно опорной поверхности.
Известен также способ определения данных о текущих параметрах движения стопы относительно опорной поверхности при помощи интегрированной стопы экзоскелета, выполненной с возможностью присоединения к голеностопному шарнирному сочленения экзоскелета и проведения измерений данных двумя датчиками, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, и с подошвенной пластиной интегрированной стопы, выполненной с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, включающий проведение указанных измерений [RU 2364385 публ. 20.08.2009].
Данный способ также позволяет осуществить измерение только таких данных о текущих параметрах движения стопы относительно опорной поверхности, как силы реакции опоры в вертикальном направлении в пяточной и носочной частях интегрированной стопы ножной опоры экзоскелета, но не позволяет определять такие параметры как расстояния от заранее выбранных точки или точек наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности и углы наклона наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета относительно опорной поверхности, что ограничивает его применение при создании систем управления, обеспечивающих движение пользователя в экзоскелете с походкой близкой к естественной.
Известна интегрированная стопа экзоскелета, включающая башмак пользователя экзоскелета и соединенный с ним опорный элемент, выполненный с возможностью присоединения к голеностопному шарнирному сочленению экзоскелета, блок обработки данных и, соединенные с ним два датчика, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, при этом подошвенная пластина интегрированной стопы выполнена с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы [US 8057410 В2 публ. 15.11.2011].
В качестве указанных датчиков в данной интегрированной стопе экзоскелета использованы датчики силы. Но данных с этих датчиков силы недостаточно для определения положения и ориентации стопы экзоскелета относительно опорной поверхности.
Известна также интегрированная стопа экзоскелета, включающая башмак пользователя экзоскелета и соединенный с ним опорный элемент, выполненный с возможностью присоединения к голеностопному шарнирному сочленению экзоскелета, блок обработки данных и, соединенные с ним два датчика, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, при этом подошвенная пластина интегрированной стопы выполнена с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы [RU 2364385 публ. 20.08.2009].
Данная интегрированная стопа также не позволяет определять такие пространственные и силовые параметры движения экзоскелета как положение и ориентация ее стопы относительно опорной поверхности, что ограничивает его применение при создании систем управления, обеспечивающих паттерн ходьбы пользователя в экзоскелете близкий к естественному.
РАСКРЫТИЕ ГРУППЫ ИЗОБРЕТЕНИЙ
Техническим результатом, на достижение которого направлена предлагаемая группа изобретений в отношении предлагаемых способа и интегрированной стопы экзоскелета по первым и вторым вариантам, является расширение функциональных возможностей предложенных способа и интегрированной стопы экзоскелета и улучшение эргономических характеристик экзоскелета в целом за счет обеспечения возможности определять такие параметры движения стопы ножной опоры экзоскелета как положение и ориентацию его стопы, а также текущую фазу движения ножной опоры экзоскелета.
Для достижения указанного технического результата в отношении первого варианта способа определения положения и ориентации стопы и фазы движения ножной опоры экзоскелета при помощи интегрированной стопы экзоскелета, выполненной с возможностью присоединения к голеностопному шарнирному сочленения экзоскелета, проведения измерений данных двумя датчиками, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, и с подошвенной пластиной интегрированной стопы, выполненной с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, включающего проведение указанных измерений, измеряют расстояния s1 и s2 от первой и, соответственно, второй заранее выбранных и разнесенных в продольном направлении на расстояние δ0 первой и второй горизонтальных осей, принадлежащих наружной поверхности пяточной и, соответственно, носочной частей подошвенной пластины интегрированной стопы, до опорной поверхности в направлении, перпендикулярном указанной наружной поверхности, где δ0 - расстояние между первой и второй фронтальными плоскостями интегрированной стопы, проходящими через вышеупомянутые первую и, соответственно, вторую горизонтальные оси, определяют соответствие текущего движения ножной опоры экзоскелета одной из четырех фаз - ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета, и вычисляют угол наклона наружной поверхности подошвенной пластины стопы экзоскелета относительно опорной поверхности, при этом, если s1 и s2 больще нуля одновременно, то фазу движения ножной опоры определяют как ПЕРЕНОС, если s1 равно нулю и s2 больще нуля одновременно, то фазу движения ножной опоры определяют как ОПОРА НА ПЯТКУ, если s1 и s2 равны нулю одновременно, то фазу движения ножной опоры определяют как ОПОРА НА ВСЮ СТОПУ, а если s1 больше нуля и s2 равно нулю одновременно, то фазу движения ножной опоры определяют как ОПОРА НА НОСОК, при этом для фаз ПЕРЕНОС, ОПОРА НА ПЯТКУ и ОПОРА НА ВСЮ СТОПУ, угол наклона γ0 наружной поверхности носочной части и равный ему угол наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности вычисляют по формуле
γ0=γ1=γ=arctg((s1-s2)/δ0),
а для фазы движения ножной опоры ОПОРА НА НОСОК, угол наклона γ0 наружной поверхности носочной части подошвенной пластины стопы экзоскелета относительно опорной поверхности определяют равным нулю, а угол наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности вычисляют по формуле
γ1=arctg(s1/δ1),
где δ1 - расстояние между первой фронтальной плоскостью и третьей фронтальной плоскостью интегрированной стопы экзоскелета, проходящей через проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы.
При этом определение текущей фазы движения ножной опоры и вычисление угла наклона γ0 наружной поверхности носочной части подошвенной пластины стопы экзоскелета относительно опорной поверхности и угла наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности может быть осуществлено программно.
Для достижения указанного технического результата в отношении второго варианта способа определения положения и ориентации стопы и фазы движения ножной опоры экзоскелета при помощи интегрированной стопы экзоскелета, выполненной с возможностью присоединения к голеностопному шарнирному сочленения экзоскелета, проведения измерений данных двумя датчиками, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, и с подошвенной пластиной интегрированной стопы, выполненной с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, измеряют расстояния s1 и s2 от первой и, соответственно, второй заранее выбранных и разнесенных в продольном направлении на расстояние δ0 первой и второй горизонтальных осей, принадлежащих наружной поверхности пяточной и, соответственно, носочной частей подошвенной пластины интегрированной стопы, до опорной поверхности в направлении, перпендикулярном указанной наружной поверхности, где δ0 - расстояние между первой и второй фронтальными плоскостями интегрированной стопы, проходящими через вышеупомянутые первую и, соответственно, вторую горизонтальные оси, дополнительно измеряют расстояние s3 от третьей заранее выбранной горизонтальной оси, также принадлежащей наружной поверхности пяточной части подошвенной пластины интегрированной стопы, но не совпадающей с первой горизонтальной осью, до опорной поверхности в направлении, перпендикулярном указанной наружной поверхности, определяют соответствие текущего движения ножной опоры экзоскелета одной из четырех фаз - ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета, при этом, если s1 и s2 больще нуля одновременно, то фазу движения ножной опоры определяют как ПЕРЕНОС, если s1 равно нулю и s2 больще нуля одновременно, то фазу движения ножной опоры определяют как ОПОРА НА ПЯТКУ, если s1 и s2 равны нулю одновременно, то фазу движения ножной опоры определяют как ОПОРА НА ВСЮ СТОПУ, а если s1 больше нуля и s2 равно нулю одновременно, то фазу движения ножной опоры определяют как ОПОРА НА НОСОК и для фазы движения ножной опоры ОПОРА НА НОСОК, угол наклона γ0 наружной поверхности носочной части подошвенной пластины стопы экзоскелета относительно опорной поверхности определяют равным нулю, а угол наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности вычисляют по формуле γ1=γ=arctg((s1-s3)/δ)
вычисляют угол γ1 наклона наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности, где δ - расстояние между первой фронтальной плоскостью и третьей фронтальной плоскостью интегрированной стопы экзоскелета, проходящей через третью фронтальную ось, а для фаз движения ПЕРЕНОС, ОПОРА НА ПЯТКУ, ОПОРА НА ВСЮ СТОПУ угол наклона γ0 наружной поверхности носочной части и равный ему угол наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности вычисляют по формуле
γ0=γ1=γ=arctg((s1-s3)/δ).
При этом определение текущей фазы движения ножной опоры и вычисление угла наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности может быть осуществлено программно.
Для достижения указанного технического результата в отношении первого варианта интегрированной стопы экзоскелета, включающей башмак пользователя экзоскелета и соединенный с ним опорный элемент, выполненный с возможностью присоединения к голеностопному шарнирному сочленению экзоскелета, блок обработки данных и, соединенные с ним два датчика, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, при этом подошвенная пластина интегрированной стопы выполнена с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, в качестве указанных датчиков используют датчики дальности от наружной поверхности подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности по осям указанных датчиков дальности в направлении, перпендикулярном указанной наружной поверхности.
При этом опорный элемент может быть размещен внутри башмака пользователя экзоскелета.
При этом подошвенная пластина башмака пользователя экзоскелета может быть использована в качестве подошвенной пластины интегрированной стопы.
При этом задник башмака пользователя экзоскелета может быть использован в качестве задника интегрированной стопы.
При этом носок башмака пользователя экзоскелета может быть использован в качестве носка интегрированной стопы.
При этом башмак пользователя может быть размещен на опорном элементе.
При этом опорный элемент может быть использован в качестве подошвенной пластины интегрированной стопы.
При этом интегрированная стопа может быть снабжена задником интегрированной стопы, смонтированным на пяточной части подошвенной пластины интегрированной стопы.
При этом о интегрированная стопа может быть снабжена носком интегрированной стопы, смонтированным на носочной части подошвенной пластины интегрированной стопы.
При этом в качестве указанных датчиков дальности могут быть использованы оптические датчики дальности.
При этом задник интегрированной стопы экзоскелета может быть выполнен из формоустойчивого материала.
При этом носок интегрированной стопы экзоскелета может быть выполнен из формоустойчивого материала.
При этом первый датчик дальности от наружной поверхности подошвенной пластины интегрированной стопы до опорной поверхности может быть смонтирован на наружной поверхности задника интегрированной стопы экзоскелета.
При этом второй датчик дальности от наружной поверхности подошвенной пластины интегрированной стопы до опорной поверхности может быть смонтирован на наружной поверхности носка интегрированной стопы экзоскелета.
При этом опорный элемент может быть присоединен к голеностопному шарнирному сочленению экзоскелета посредством опорной стойки.
При этом первый и второй датчики дальности могут быть соединены с блоком обработки данных посредством канала обмена данными.
При этом в качестве блока обработки данных может быть использован микроконтроллер.
При этом башмак пользователя экзоскелета может быть снабжен накладным задником, жестко соединенным с подошвенной пластиной башмака пользователя и использованным в качестве задника интегрированной стопы экзоскелета.
При этом башмак пользователя экзоскелета может быть снабжен накладным носком, жестко соединенным с подошвенной пластиной башмака пользователя и использованным в качестве носка интегрированной стопы экзоскелета.
Для достижения указанного технического результата в отношении второго варианта интегрированной стопы экзоскелета, включающей башмак пользователя экзоскелета и соединенный с ним опорный элемент, выполненный с возможностью присоединения к голеностопному шарнирному сочленению экзоскелета, блок обработки данных и, соединенные с ним два датчика, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, при этом подошвенная пластина интегрированной стопы выполнена с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, она дополнительно снабжена третьим датчиком, также смонтированным на пяточной части интегрированной стопы, но разнесенным с первым датчиком в продольном направлении, а в качестве первого, второго и третьего вышеперечисленных датчиков использованы датчики дальности от наружной поверхности подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности по осям указанных датчиков дальности в направлении, перпендикулярном указанной наружной поверхности.
При этом опорный элемент может быть размещен внутри башмака пользователя экзоскелета.
При этом подошвенная пластина башмака пользователя экзоскелета может быть использована в качестве подошвенной пластины интегрированной стопы.
При этом задник башмака пользователя экзоскелета может быть использован в качестве задника интегрированной стопы.
При этом носок башмака пользователя экзоскелета может быть использован в качестве носка интегрированной стопы.
При этом башмак пользователя может быть размещен на опорном элементе.
При этом опорный элемент может быть использован в качестве подошвенной пластины интегрированной стопы.
При этом интегрированная стопа может быть снабжена задником интегрированной стопы, смонтированным на пяточной части подошвенной пластины интегрированной стопы.
При этом о интегрированная стопа может быть снабжена носком интегрированной стопы, смонтированным на носочной части подошвенной пластины интегрированной стопы.
При этом в качестве указанных датчиков дальности могут быть использованы оптические датчики дальности.
При этом задник интегрированной стопы экзоскелета может быть выполнен из формоустойчивого материала.
При этом носок интегрированной стопы экзоскелета может быть выполнен из формоустойчивого материала.
При этом первый и третий датчики дальности от наружной поверхности подошвенной пластины интегрированной стопы до опорной поверхности могут быть смонтированы на наружной поверхности задника интегрированной стопы экзоскелета.
При этом второй датчик дальности от наружной поверхности подошвенной пластины интегрированной стопы до опорной поверхности может быть смонтирован на наружной поверхности носка интегрированной стопы экзоскелета.
При этом опорный элемент может быть присоединен к голеностопному шарнирному сочленению экзоскелета посредством опорной стойки.
При этом первый, второй и третий датчики дальности могут быть соединены с блоком обработки данных посредством канала обмена данными.
При этом в качестве блока обработки данных может быть использован микроконтроллер.
При этом башмак пользователя экзоскелета может быть снабжен накладным задником, жестко соединенным с подошвенной пластиной башмака пользователя и использованным в качестве задника интегрированной стопы экзоскелета.
При этом башмак пользователя экзоскелета может быть снабжен накладным носком, жестко соединенным с подошвенной пластиной башмака пользователя и использованным в качестве носка интегрированной стопы 1 экзоскелета.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Изобретения будут более понятными из описания, не имеющего ограничительного характера и приводимого со ссылками на прилагаемые чертежи Фиг. 1-Фиг. 16, на которых изображено:
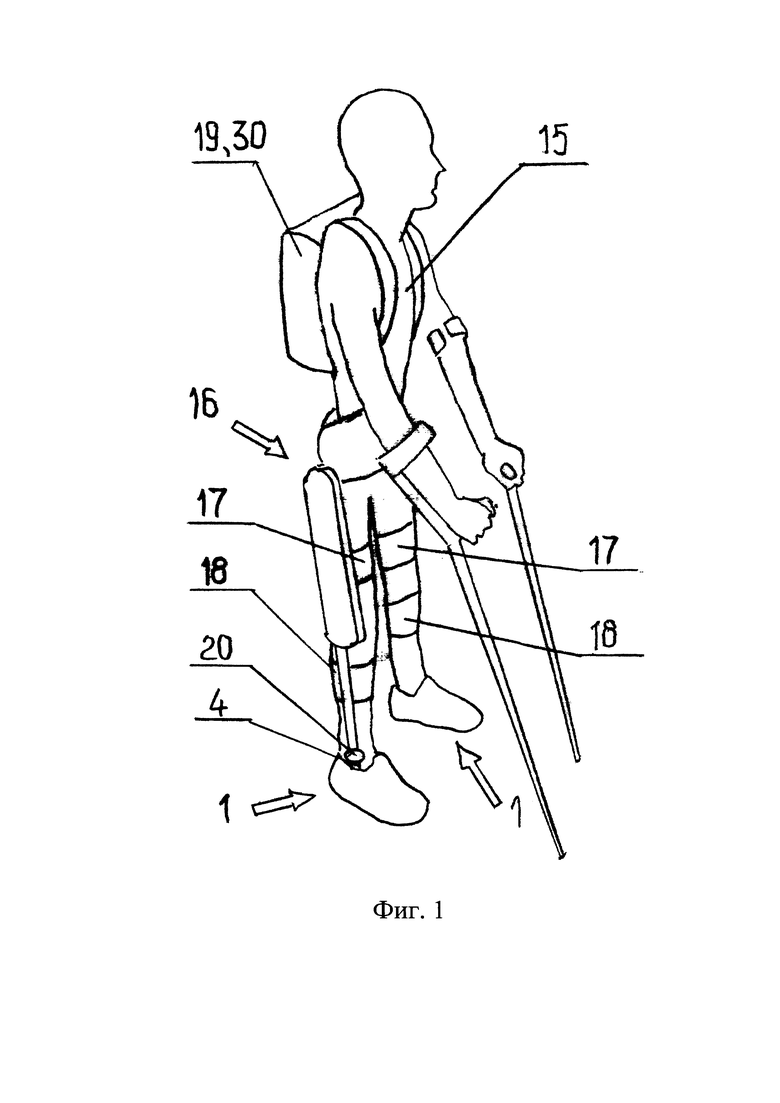
Фиг. 1 - Экзоскелет нижних конечностей с оконечным звеном в виде интегрированной стопы;
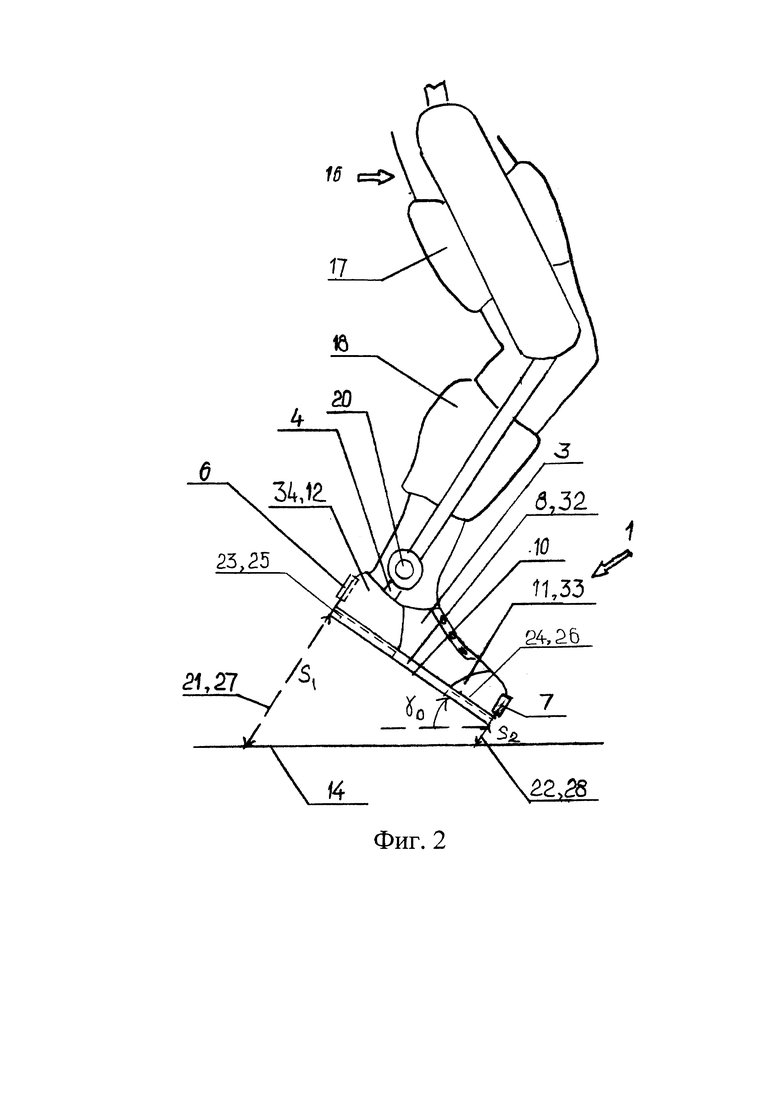
Фиг. 2 - Ножная опора экзоскелета с оконечным звеном в виде интегрированной стопы;
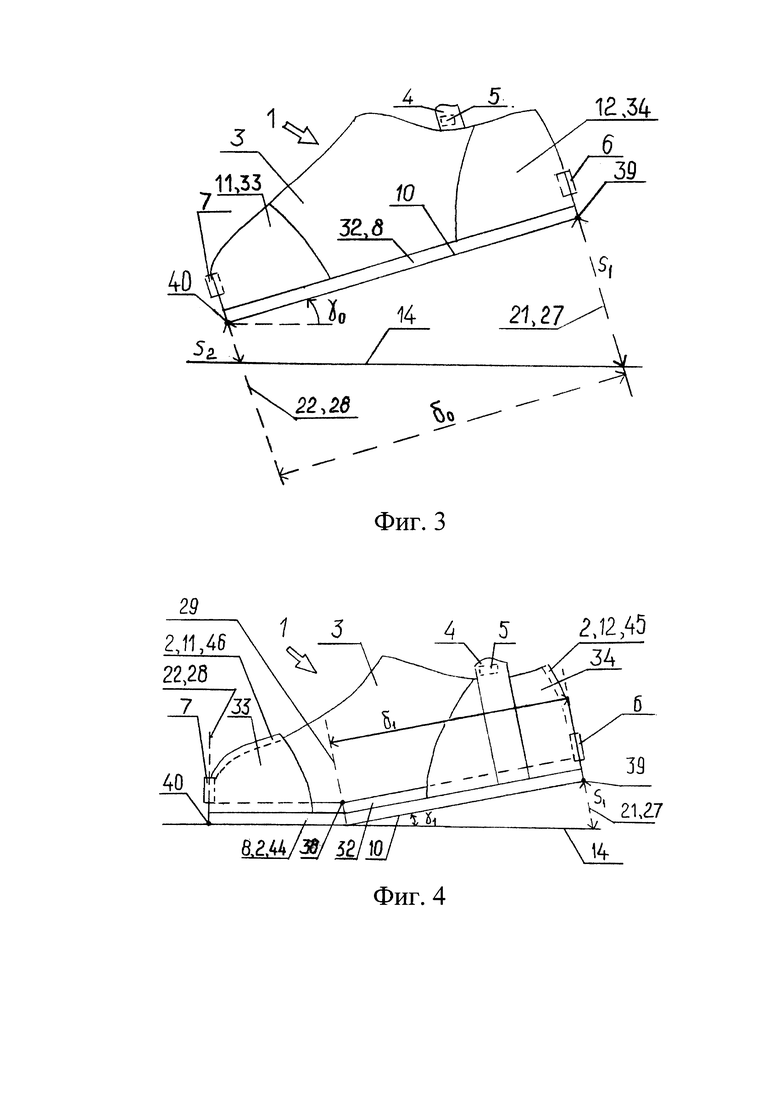
Фиг. 3 - Интегрированная стопа с размещением одного датчика дальности на заднике башмака пользователя и одного датчика дальности на носке башмака пользователя и использованием в качестве подошвенной пластины интегрированной стопы подошвенной пластины башмака пользователя;
Фиг. 4 - Интегрированная стопа с размещением одного датчика дальности на заднике опорного элемента и одного датчика дальности на носке опорного элемента и использованием в качестве подошвенной пластины интегрированной стопы подошвенной пластины опорного элемента;
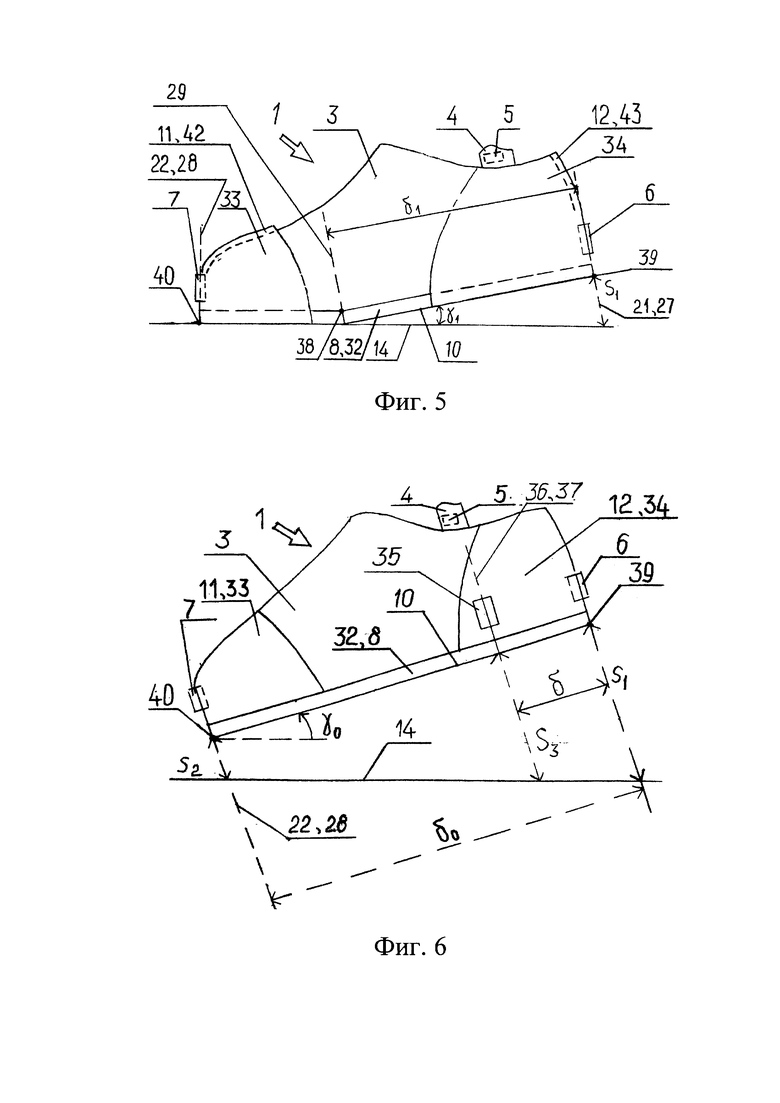
Фиг. 5 - Интегрированная стопа с размещением одного датчика дальности на накладном заднике и одного датчика дальности на накладном носке и использованием в качестве подошвенной пластины интегрированной стопы подошвенной пластины башмака пользователя;
Фиг. 6 - Интегрированная стопа с размещением двух датчиков дальности на заднике башмака пользователя и одного датчика дальности на носке башмака пользователя и использованием в качестве подошвенной пластины интегрированной стопы подошвенной пластины башмака пользователя;
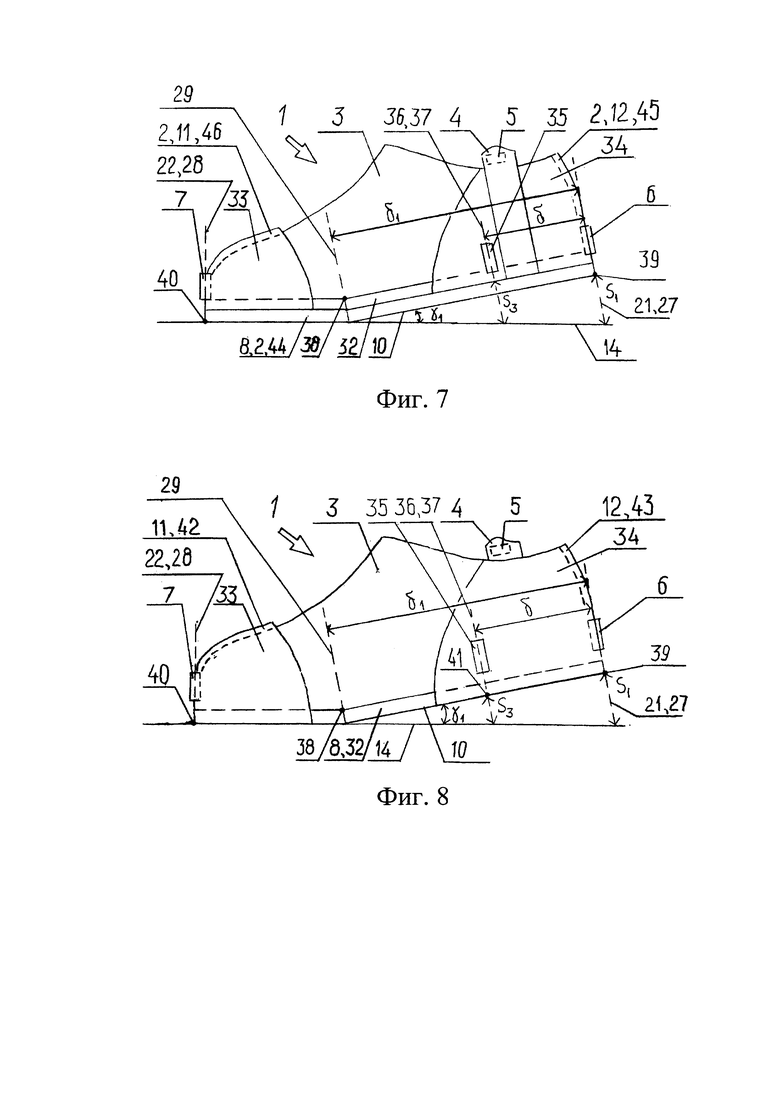
Фиг. 7 - Интегрированная стопа с размещением двух датчиков дальности на заднике опорного элемента и одного датчика дальности на носке опорного элемента и использованием в качестве подошвенной пластины;
Фиг. 8 - Интегрированная стопа с размещением двух датчиков дальности на накладном заднике и одного датчика дальности на накладном носке и использованием в качестве подошвенной пластины интегрированной стопы подошвенной пластины башмака пользователя;
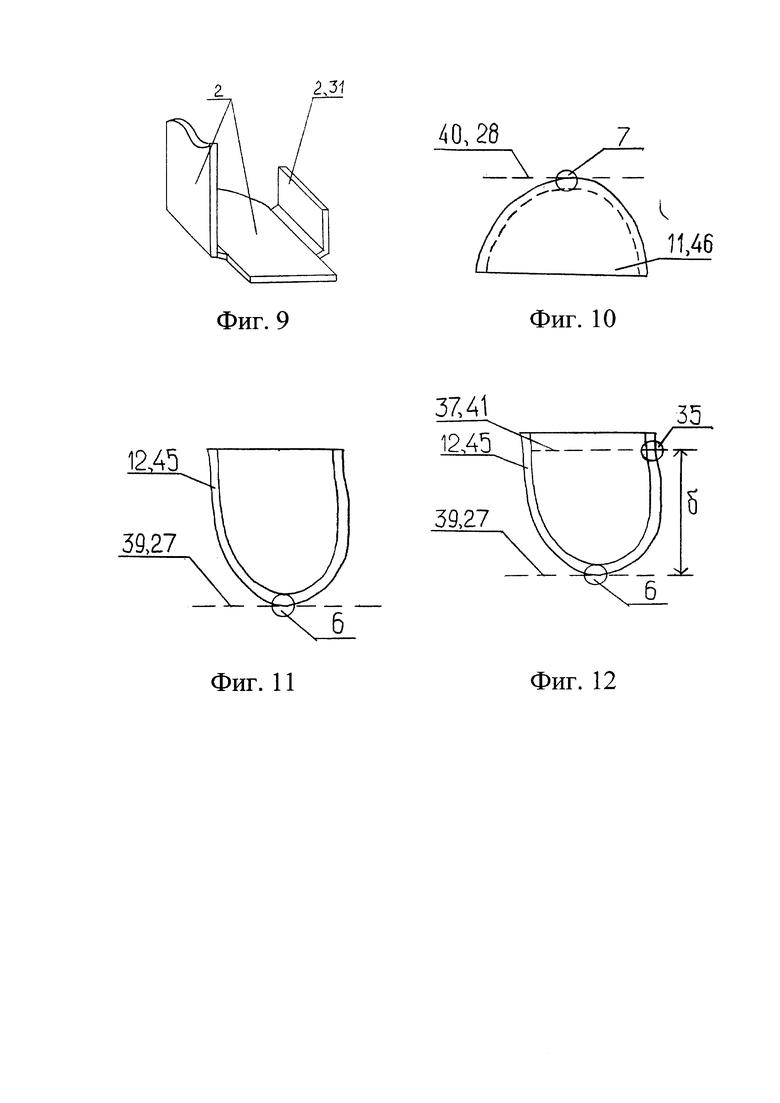
Фиг. 9 - Опорный элемент в виде Г-образно изогнутой пластины;
Фиг. 10 - Накладной носок со смонтированным на нем одним датчиком дальности;
Фиг. 11 - Накладной задник со смонтированным на нем одним датчиком дальности;
Фиг. 12 - Накладной задник со смонтированными на нем двумя датчиками дальности;
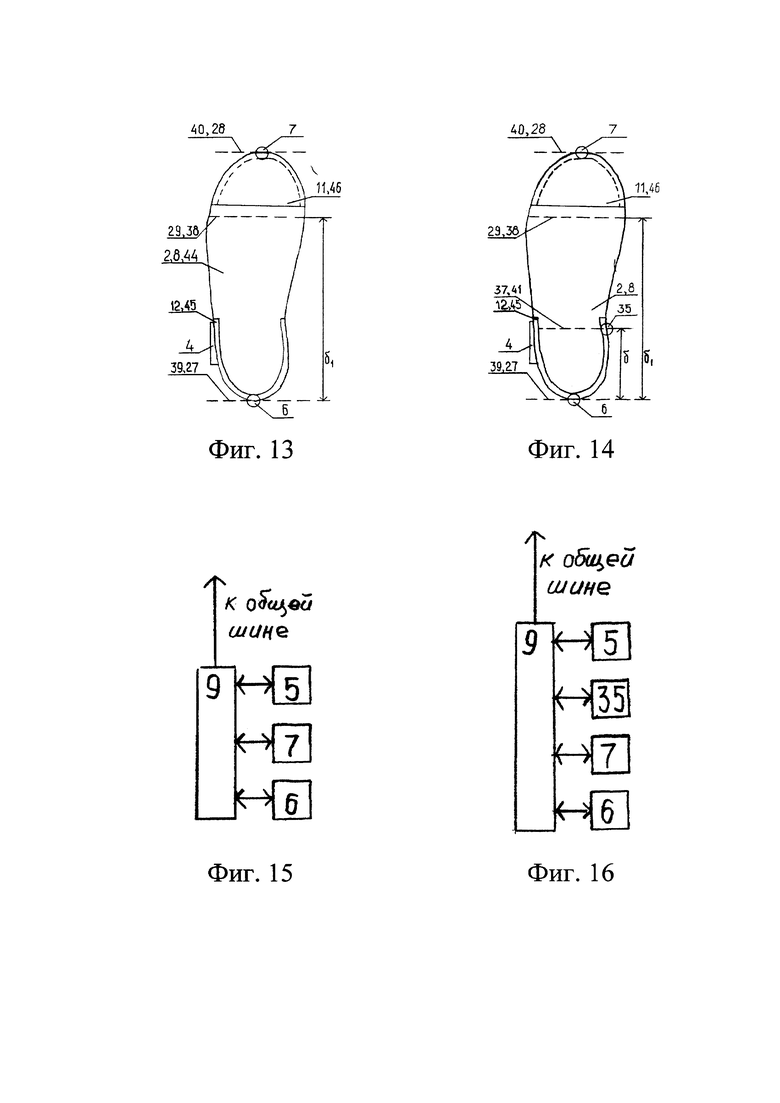
Фиг. 13 - Опорный элемент в виде подошвенной пластины опорного элемента со смонтированными на ней задником опорного элемента, носком опорного элемента, одним датчиком дальности на заднике опорного элемента и одним датчиком дальности на носке опорного элемента (вид сверху)
Фиг. 14 - Опорный элемент в виде подошвенной пластины опорного элемента со смонтированными на ней задником опорного элемента, носком опорного элемента, двумя датчиками дальности на заднике опорного элемента и одним датчиком дальности на носке опорного элемента (вид сверху);
Фиг. 15 - Функциональная схема системы сбора и обработки данных с датчиков интегрированной стопы с одним датчиком дальности на заднике интегрированной стопы и одним датчиком дальности на носке интегрированной стопы;
Фиг. 16 - Функциональная схема системы сбора и обработки данных с датчиков интегрированной стопы с двумя датчиками дальности на заднике интегрированной стопы и одним датчиком дальности на носке интегрированной стопы.
На Фиг. 1-16 обозначены:
1 - интегрированная стопа экзоскелета;
2 - опорный элемент;
3 - башмак пользователя;
4 - опорная стойка;
5 - блок обработки данных;
6 и 7 - первый и, соответственно, второй датчики дальности;
8 - подошвенная пластина интегрированной стопы;
9 - канал обмена данными;
10 - наружная поверхность подошвенной пластины интегрированной стопы;
11 - носок интегрированной стопы;
12 - задник интегрированной стопы;
13 - вкладная стелька;
14 - опорная поверхность;
15 - пользователь экзоскелета;
16 - ножная опора экзоскелета;
17 - элемент крепления бедренного звена экзоскелета к бедру пользователя;
18 - элемент крепления голенного звена экзоскелета к голени пользователя;
19 - аккумулятор;
20 - голеностопный шарнир экзоскелета;
21 и 22 - оптическая ось первого и, соответственно, второго датчиков дальности;
27, 28 и 29 - первая, вторая и, соответственно, третья фронтальные плоскости;
30 - головной контроллер экзоскелета;
31 - бортик опорной пластины;
32 - подошвенная пластина башмака пользователя;
33 - носок башмака пользователя;
34 - задник башмака пользователя;
35 - третий датчик дальности;
36 - оптическая ось третьего оптического датчика;
37 - четвертая фронтальная плоскость;
38 - проекция оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы;
39, 40 и 41 - первая, вторая и, соответственно, третья фронтальные оси;
42 - накладной носок;
43 - накладной задник;
44 - подошвенная пластина опорного элемента;
45 - задник опорного элемента;
46 - носок опорного элемента.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЙ
Для реализации способа определения положения и ориентации стопы 1 и фазы движения ножной опоры 16 экзоскелета по первому и второму вариантам его осуществления применяется интегрированная стопа 1 экзоскелета, которая используется в составе моторизованного экзоскелета нижних конечностей (фиг. 1), является оконечным звеном его ножной опоры 16 (фиг. 2) и через опорную стойку 4 соединена с голеностопным шарниром 20 экзоскелета. Экзоскелет с помощью элементов 17 и 18 крепления соединен с ногами пользователя 15, а электропитание приводов, датчиков, головного контроллера 30 и других электронных блоков обработки данных и управления экзоскелета осуществляется от аккумулятора 19.
Способ определения положения и ориентации стопы и фазы движения ножной опоры экзоскелета по первому варианту осуществляется следующим образом.
Измеряют расстояния s1 и s2 от первой и, соответственно, второй заранее выбранных и разнесенных в продольном направлении на расстояние δ0 первой 39 и второй 40 фронтальных осей, принадлежащих наружной поверхности 10 пяточной и, соответственно, носочной частей подошвенной пластины 8 интегрированной стопы 1, до опорной поверхности 14 в направлении, перпендикулярном указанной наружной поверхности 10, где δ0 - расстояние между первой 27 и второй 28 фронтальными плоскостями интегрированной стопы 1, проходящими через вышеупомянутые первую 39 и, соответственно, вторую 40 фронтальные оси (Фиг. 3-5). При этом подошвенная пластина 8 интегрированной стопы 1 выполнена с возможностью изгиба в области, включающей проекцию 38 оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину 8 интегрированной стопы 1.
Указанные измерения осуществляют двумя датчиками 6 и 7 дальности, первый 6 из которых смонтирован на пяточной части интегрированной стопы 1, а второй 7 - на ее носочной части (Фиг. 3-5).
При этом первый 6 датчик дальности смонтирован на наружной поверхности задника 12 интегрированной стопы 1, в качестве которого может использоваться задник 34 башмака 3 пользователя 15 (Фиг. 3), задник 45 опорного элемента 2 (Фиг. 4) или накладной задник 43 (Фиг. 5, 11). Второй 7 датчик дальности смонтирован на наружной поверхности носка 11 интегрированной стопы 1, в качестве которого может использоваться носок 33 башмака 3 пользователя 15 (Фиг. 3), носок 42 опорного элемента 2 (Фиг. 4) или накладной носок 42 (Фиг. 5, 10).
Данные, полученные с первого 6 и второго 7 датчиков дальности по каналу 9 обмена данными передают в блок 5 обработки данных (Фиг. 15), в котором определяют соответствие текущего движения ножной опоры 16 экзоскелета одной из четырех фаз - ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета.
Блок 5 обработки данных может быть смонтирован на опорной стойке 4.
При этом, если s1 и s2 больще нуля одновременно, то фазу движения ножной опоры 16 определяют как ПЕРЕНОС (Фиг. 3), если s1 равно нулю и s2 больще нуля одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА ПЯТКУ, если s1 и s2 равны нулю одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА ВСЮ СТОПУ, а если s1 больше нуля и s2 равно нулю одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА НОСОК (Фиг. 4, 5).
После этого, в том же блоке 5 обработки данных вычисляют угол наклона γ0 наружной поверхности 10 подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 и угол наклона γ0 наружной поверхности 10 подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 и угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 кзоскелета относительно опорной поверхности 14.
При этом для фаз ПЕРЕНОС (Фиг. 3), ОПОРА НА ПЯТКУ и ОПОРА НА ВСЮ СТОПУ угол наклона γ0 наружной поверхности 10 носочной части и равный ему угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 вычисляют по формуле
γ0=γ1=γ=arctg((s1-s2)/δ0),
а для фазы движения ножной опоры 16 ОПОРА НА НОСОК, угол наклона γ0 наружной поверхности 10 носочной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 определяют равным нулю, а угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 вычисляют по формуле
γ1=arctg(s1/δ1),
где δ1 - расстояние между первой 27 фронтальной плоскостью и третьей 29 фронтальной плоскостью интегрированной стопы 1 экзоскелета, проходящей через проекцию оси изгиба стопы пользователя 15 в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину 8 интегрированной стопы 1.
При этом в качестве блока 10 обработки данных может быть использован микроконтроллер, а определение текущей фазы движения ножной опоры 16 и вычисление угла наклона γ0 наружной поверхности 10 подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 и угла наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 может быть осуществлено программно.
Полученные в блоке 5 обработки данных данные по каналу 9 обмена данными и, подключенную к нему общую шину (на чертежах не показана), передают в головной контроллер 30 экзоскелета.
Способ определения положения и ориентации стопы и фазы движения ножной опоры экзоскелета по второму варианту осуществляется следующим образом.
Измеряют расстояния s1 и s2 от первой и, соответственно, второй заранее выбранных и разнесенных в продольном направлении на расстояние δ0 первой 39 и второй 40 фронтальных осей, принадлежащих наружной поверхности 10 пяточной и, соответственно, носочной частей подошвенной пластины 8 интегрированной стопы 1, до опорной поверхности 14 в направлении, перпендикулярном указанной наружной поверхности 10, где δ0 - расстояние между первой 27 и второй 28 фронтальными плоскостями интегрированной стопы 1, проходящими через вышеупомянутые первую 39 и, соответственно, вторую 40 фронтальные оси (Фиг. 6-8).
Дополнительно измеряют расстояние s3 oт третьей 41 заранее выбранной фронтальной оси, также принадлежащей наружной поверхности 10 пяточной части подошвенной пластины 8 интегрированной стопы, но не совпадающей с первой 27 фронтальной осью, до опорной поверхности 14 в направлении, перпендикулярном указанной наружной поверхности 10 (Фиг. 6-8).
Измерения расстояний s1 и s2 осуществляют двумя датчиками 6 и 7 дальности, первый 6 из которых смонтирован на пяточной части интегрированной стопы 1, а второй 7 - на ее носочной части, а измерение расстояния s3 осуществляют третьим датчиком 35 дальности, также смонтированным на пяточной части интегрированной стопы 1, но разнесенным с первым датчиком 6 в продольном направлении на расстояние δ (Фиг. 8, 12).
При этом первый 6 и третий 35 датчики дальности смонтированы на наружной поверхности задника 12 интегрированной стопы 1, в качестве которого может использоваться задник 34 башмака 3 пользователя 15 (Фиг. 6), задник 45 опорного элемента 2 (Фиг. 7) или накладной задник 43 (Фиг. 8). Второй 7 датчик дальности смонтирован на наружной поверхности носка 11 интегрированной стопы 1, в качестве которого может использоваться носок 33 башмака 3 пользователя 15 (Фиг. 6), носок 46 опорного элемента 2 (Фиг. 7) или накладной носок 42 (Фиг. 8).
По каналу 9 обмена данными передают данные от датчиков 6, 7 и 35 дальности в блок 5 обработки данных, в качестве которого может использоваться микроконтроллер.
Данные, полученные с первого 6, второго 7 и третьего 35 датчиков дальности по каналу 9 обмена данными передают в блок 5 обработки данных (Фиг. 16), в качестве которого может использоваться микроконтроллер и в котором определяют соответствие текущего движения ножной опоры 16 экзоскелета одной из четырех фаз - ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета. Блок 5 обработки данных может быть смонтирован на опорной стойке 4.
При этом, если s1 и s2 больще нуля одновременно, то фазу движения ножной опоры 16 определяют как ПЕРЕНОС (Фиг. 3 и 6), если s1 равно нулю и s2 больще нуля одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА ПЯТКУ, если s1 и s2 равны нулю одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА ВСЮ СТОПУ, а если s1 больше нуля и s2 равно нулю одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА НОСОК (Фиг. 7 и 8) и для фазы движения ножной опоры ОПОРА НА НОСОК, угол наклона γ0 наружной поверхности 10 носочной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 определяют равным нулю, а угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 вычисляют по формуле γ1=γ=arctg((s1-s3)/δ)
вычисляют угол γ1 наклона наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности, где δ - расстояние между первой 27 фронтальной плоскостью и четвертой 37 фронтальной плоскостью интегрированной стопы 1 экзоскелета, проходящей через третью 41 фронтальную ось, а для фаз движения ПЕРЕНОС, ОПОРА НА ПЯТКУ, ОПОРА НА ВСЮ СТОПУ угол наклона γ0 наружной поверхности 10 носочной части и равный ему угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 вычисляют по формуле
γ0=γ1=γ=arctg((s1-s3)/δ).
При этом, если в качестве блока 5 обработки данных используется микроконтроллер, то определение текущей фазы движения ножной опоры 16 и вычисление угла наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 может быть осуществлено программно.
Полученные в блоке 5 обработки данных данные по каналу 9 обмена данными и, подключенную к нему общую шину (на чертежах не показана), передают в головной контроллер 30 экзоскелета.
Интегрированная стопа 1 экзоскелета по первому и второму вариантам ее выполнения образована интеграцией башмака 3 пользователя экзоскелета с опорный элементом 2, который может быть выполнен например, в виде Г-образной пластины (Фиг. 9) или «стремени», размещенных внутри башмака 3 пользователя экзоскелета, или выполнять функцию подошвенной пластины 8 интегрированной стопы 1, на которую устанавливается башмак 3 пользователя экзоскелета.
Интегрированная стопа 1 экзоскелета по первому варианту ее выполнения включает башмак 3 пользователя экзоскелета и соединенный с ним опорный элемент 2, выполненный с возможностью присоединения к голеностопному шарнирному сочленению 20 экзоскелета, блок 5 обработки данных и, соединенные с ним два датчика 6 и 7, первый 6 из которых смонтирован на пяточной части интегрированной стопы 1, а второй 7 - на ее носочной части. При этом подошвенная пластина 8 интегрированной стопы 1 выполнена с возможностью изгиба в области, включающей проекцию 38 оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину 8 интегрированной стопы 1, а в качестве указанных датчиков 6 и 7 используют датчики дальности от наружной поверхности 10 подошвенной пластины 8 интегрированной стопы 1 экзоскелета до опорной поверхности 14 по осям 21 и 22 указанных датчиков 6 и 7 дальности в направлении, перпендикулярном указанной наружной поверхности 10.
При этом опорный элемент 2 может быть размещен внутри башмака 3 пользователя экзоскелета.
При этом подошвенная пластина 32 башмака 3 пользователя экзоскелета может быть использована в качестве подошвенной пластины 8 интегрированной стопы 1 (Фиг. 3, 5).
При этом задник 34 башмака 3 пользователя экзоскелета может быть использован в качестве задника 12 интегрированной стопы 1 (Фиг. 3).
При этом носок 33 башмака 3 пользователя экзоскелета может быть использован в качестве носка 11 интегрированной стопы 1 (Фиг. 3).
При этом башмак 3 пользователя может быть размещен на опорном элементе 2 (Фиг. 12).
При этом подошвенная пластина 44 опорного элемента 2 может быть использована в качестве подошвенной пластины 8 интегрированной стопы 1 (Фиг. 4, 13).
При этом подошвенная пластина 44 опорного элемента 2 может быть снабжена задником 45 опорного элемента 2, смонтированным на пяточной части опорного элемента 2 интегрированной стопы 1 (Фиг. 4, 13).
При этом подошвенная пластина 44 опорного элемента 2 может быть снабжена носком 46 опорного элемента 2, смонтированным на носочной части опорного элемента 2 интегрированной стопы 1 (Фиг. 4, 13).
При этом в качестве указанных датчиков 6 и 7 дальности могут быть использованы оптические датчики дальности.
При этом задник 12 интегрированной стопы 1 экзоскелета может быть выполнен из формоустойчивого материала.
При этом носок 11 интегрированной стопы 1 экзоскелета может быть выполнен из формоустойчивого материала.
При этом первый 6 датчик дальности от наружной поверхности 10 подошвенной пластины 8 интегрированной стопы 1 до опорной поверхности 14 может быть смонтирован на наружной поверхности задника 12 интегрированной стопы 1 экзоскелета.
При этом второй 7 датчик дальности от наружной поверхности 10 подошвенной пластины 8 интегрированной стопы 1 до опорной поверхности 14 может быть смонтирован на наружной поверхности носка 11 интегрированной стопы 1 экзоскелета.
При этом опорный элемент 2 может быть присоединен к голеностопному шарнирному сочленению 20 экзоскелета посредством опорной стойки 4. (Фиг. 1, 2, 10 и 11).
При этом первый 6 и второй 7 датчики дальности могут быть соединены с блоком 5 обработки данных посредством канала 9 обмена данными.
При этом в качестве блока 10 обработки данных может быть использован микроконтроллер.
При этом интегрированная стопа 1 может быть снабжена накладным задником 43, выполненным с возможностью жесткого соединения с подошвенной пластиной 32 башмака 3 пользователя и использованным в качестве задника 12 интегрированной стопы 1 экзоскелета (Фиг. 8).
При этом интегрированная стопа 1 может быть снабжена накладным накладным носком 42, жестко соединенным с подошвенной пластиной 32 башмака 3 пользователя и использованным в качестве носка 11 интегрированной стопы 1 экзоскелета (Фиг. 8).
Интегрированную стопу 1 экзоскелета по первому варианту наряду с использованием ее по прямому назначению в качестве оконечного элемента ножной опоры 16 экзоскелета и выполненную с возможностью соединения с голеностопным шарнирным сочленением 20 экзоскелета посредством опорной стойки 4, используют также для определений положения и ориентации стопы и фазы движения ножной опоры 16 экзоскелета, которые осуществляют следующим образом.
Двумя датчиками 6 и 7 дальности, в качестве которых использованы оптические датчики дальности, первый 6 из которых смонтирован на пяточной части интегрированной стопы 1, а второй 7 - на ее носочной части, измеряют расстояния s1 и s2 от первой 39 и, соответственно, второй 40 заранее выбранных и разнесенных в продольном направлении на расстояние δ0 фронтальных осей, принадлежащих наружной поверхности 10 пяточной и, соответственно, носочной частей подошвенной пластины 8 интегрированной стопы 1, до опорной поверхности 14 в направлении, перпендикулярном указанной наружной поверхности 10, где δ0 - расстояние между первой 27 и второй 28 фронтальными плоскостями интегрированной стопы 1, проходящими через вышеупомянутые первую 39 и, соответственно, вторую 40 фронтальные оси.
При этом первый 6 датчик дальности смонтирован на наружной поверхности задника 12 интегрированной стопы 1, в качестве которого может также использоваться задник 34 башмака 3 пользователя 15 или накладной задник 43. Второй 7 датчик дальности смонтирован на наружной поверхности носка 11 интегрированной стопы 1, в качестве которого может также использоваться носок 33 башмака 3 пользователя 15 или накладной носок 42.
При этом подошвенная пластина 8 интегрированной стопы 1 выполнена с возможностью изгиба в области, включающей проекцию 38 оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину 8 интегрированной стопы 1.
Данные, полученные с первого 6 и второго 7 датчиков дальности по каналу 9 обмена данными передают в блок 5 обработки данных (Фиг. 14), в котором определяют соответствие текущего движения ножной опоры 16 экзоскелета одной из четырех фаз - ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета.
Блок 5 обработки данных может быть смонтирован на опорной стойке 4.
При этом, если s1 и s2 больще нуля одновременно, то фазу движения ножной опоры 16 определяют как ПЕРЕНОС, если s1 равно нулю и s2 больще нуля одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА ПЯТКУ, если s1 и s2 равны нулю одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА ВСЮ СТОПУ, а если s1 больше нуля и s2 равно нулю одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА НОСОК.
После этого, в том же блоке 5 обработки данных вычисляют угол наклона γ0 наружной поверхности 10 подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 и угол наклона γ0 наружной поверхности 10 подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 и угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 кзоскелета относительно опорной поверхности 14.
При этом для фаз ПЕРЕНОС), ОПОРА НА ПЯТКУ и ОПОРА НА ВСЮ СТОПУ, угол наклона γ0 наружной поверхности 10 носочной части и равный ему угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 вычисляют по формуле
γ0=γ1=γ=arctg((s1-s2)/δ0),
а для фазы движения ножной опоры 16 ОПОРА НА НОСОК, угол наклона γ0 наружной поверхности 10 носочной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 определяют равным нулю, а угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 вычисляют по формуле
γ1=arctg(s1/δ1),
где δ1 - расстояние между первой 27 фронтальной плоскостью и третьей 29 фронтальной плоскостью интегрированной стопы 1 экзоскелета, проходящей через проекцию оси изгиба стопы пользователя 15 в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину 8 интегрированной стопы 1.
При этом в качестве блока 10 обработки данных может быть использован микроконтроллер, а определение текущей фазы движения ножной опоры 16 и вычисление угла наклона γ0 наружной поверхности 10 носочной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 и угла наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 может быть осуществлено программно.
Полученные в блоке 5 обработки данных данные по каналу 9 обмена данными и, подключенную к нему общую шину (на чертежах не показана), передают в головной контроллер 30 экзоскелета.
Интегрированная стопа 1 экзоскелета по второму варианту ее выполнения включает башмак 3 пользователя экзоскелета и соединенный с ним опорный элемент 2, выполненный с возможностью присоединения к голеностопному шарнирному сочленению 20 экзоскелета, блок 5 обработки данных и, соединенные с ним два датчика 6 и 7, первый из которых смонтирован на пяточной части интегрированной стопы 1, а второй 7 - на ее носочной части, при этом подошвенная пластина 8 интегрированной стопы 1 выполнена с возможностью изгиба в области, включающей проекцию 38 оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину 8 интегрированной стопы 1, третий датчик 35, также смонтированный на пяточной части интегрированной стопы 1, но разнесенный с первым датчиком 6 в продольном направлении, а в качестве первого 6, второго 7 и третьего 35 вышеперечисленных датчиков использованы датчики дальности от наружной поверхности 10 подошвенной пластины 8 интегрированной стопы 1 экзоскелета до опорной поверхности 14 по осям 21, 22 и, соответственно, 36 указанных датчиков 6, 7 и 35 дальности в направлении, перпендикулярном указанной наружной поверхности 10.
При этом опорный элемент 2 может быть размещен внутри башмака 3 пользователя экзоскелета.
При этом подошвенная пластина 32 башмака 3 пользователя экзоскелета может быть использована в качестве подошвенной пластины 8 интегрированной стопы 1.
При этом задник 34 башмака 3 пользователя экзоскелета может быть использован в качестве задника 12 интегрированной стопы 1.
При этом носок 33 башмака 3 пользователя экзоскелета может быть использован в качестве носка 11 интегрированной стопы 1.
При этом башмак 3 пользователя может быть размещен на опорном элементе 2.
При этом опорный элемент 2 может быть использован в качестве подошвенной пластины 8 интегрированной стопы 1.
При этом интегрированная стопа 1 может быть снабжена задником 12 интегрированной стопы 1, смонтированным на пяточной части подошвенной пластины 8 интегрированной стопы 1.
При этом о интегрированная стопа 1 может быть снабжена носком 11 интегрированной стопы 1, смонтированным на носочной части подошвенной пластины 8 интегрированной стопы 1.
При этом в качестве указанных датчиков 6, 7 и 35 дальности могут быть использованы оптические датчики дальности.
При этом задник 12 интегрированной стопы 1 экзоскелета может быть выполнен из формоустойчивого материала.
При этом носок 11 интегрированной стопы 1 экзоскелета может быть выполнен из формоустойчивого материала.
При этом первый 6 и третий 35 датчики дальности от наружной поверхности 10 подошвенной пластины 8 интегрированной стопы 1 до опорной поверхности 14 могут быть смонтированы на наружной поверхности задника 12 интегрированной стопы 1 экзоскелета.
При этом второй 7 датчик дальности от наружной поверхности 10 подошвенной пластины 8 интегрированной стопы 1 до опорной поверхности 14 может быть смонтирован на наружной поверхности носка 11 интегрированной стопы 1 экзоскелета. При этом опорный элемент 2 может быть присоединен к голеностопному шарнирному сочленению 20 экзоскелета посредством опорной стойки 4. При этом первый 6, второй 7 и третий 35 датчики дальности могут быть соединены с блоком 5 обработки данных посредством канала 9 обмена данными.
При этом в качестве блока 10 обработки данных может быть использован микроконтроллер.
При этом башмак 3 пользователя экзоскелета может быть снабжен накладным задником 43, жестко соединенным с подошвенной пластиной 32 башмака 3 пользователя и использованным в качестве задника 12 интегрированной стопы 1 экзоскелета.
При этом башмак 3 пользователя экзоскелета может быть снабжен накладным носком 42, жестко соединенным с подошвенной пластиной 32 башмака 3 пользователя и использованным в качестве носка 11 интегрированной стопы 1 экзоскелета.
Интегрированную стопу 1 экзоскелета по второму варианту наряду с использованием ее по прямому назначению в качестве оконечного элемента ножной опоры 16 экзоскелета и выполненную с возможностью соединения с голеностопным шарнирным сочленением 20 экзоскелета посредством опорной стойки 4, используют также для определений положения и ориентации стопы и фазы движения ножной опоры 16 экзоскелета, которые осуществляют следующим образом.
Двумя датчиками 6 и 7 дальности, в качестве которых использованы оптические датчики дальности, первый 6 из которых смонтирован на пяточной части интегрированной стопы 1, а второй 7 - на ее носочной части, измеряют расстояния s1 и s2 от первой 39 и, соответственно, второй 40 заранее выбранных и разнесенных в продольном направлении на расстояние δ0 фронтальных осей, принадлежащих наружной поверхности 10 пяточной и, соответственно, носочной частей подошвенной пластины 8 интегрированной стопы 1, до опорной поверхности 14 в направлении, перпендикулярном указанной наружной поверхности 10, где δ0 - расстояние между первой 27 и второй 28 фронтальными плоскостями интегрированной стопы 1, проходящими через вышеупомянутые первую 39 и, соответственно, вторую 40 фронтальные оси. При этом подошвенная пластина 8 интегрированной стопы 1 выполнена с возможностью изгиба в области, включающей проекцию 38 оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину 8 интегрированной стопы 1.
При этом первый оптический датчик 6 дальности смонтирован на заднике 12, а второй оптический датчик 7 дальности - на носке 11 интегрированной стопы, которые с целью обеспечения поддержания стабильности положения оптических осей 21 и 22 датчиков и их характеристик в процессе движения пользователя, выполнены из формоустойчивого материала.
Третьим датчиком 35 дальности, в качестве которого также использован оптический датчик дальности, измеряют расстояние s3 от третьей 41 заранее выбранной фронтальной оси, также принадлежащей наружной поверхности 10 пяточной части подошвенной пластины 8 интегрированной стопы 1, но не совпадающей с первой 39 фронтальной осью, до опорной поверхности 14 в направлении, перпендикулярном указанной наружной поверхности 10.
При этом первый 6 и третий 35 оптические датчики дальности смонтированы на заднике 12, а второй оптический датчик 7 дальности - на носке 11 интегрированной стопы, которые с целью обеспечения поддержания стабильности положения оптических осей 21, 22 и 36 датчиков и их характеристик в процессе движения пользователя, выполнены из формоустойчивого материала.
Возможен вариант, при котором в качестве элемента, на наружной поверхности которого размещены датчики дальности 6 и 35, использован задник 34 башмака 3 пользователя экзоскелета, в качестве элемента, на наружной поверхности которого размещен датчик дальности 7, использован носок 33 башмака 3 пользователя экзоскелета, а в качестве подошвенной пластины 8 интегрированной стопы 1 экзоскелета использована подошвенная пластина 32 башмака 3 пользователя экзоскелета.
Также возможен вариант, при котором в качестве элемента, на наружной поверхности которого размещены датчики дальности 6 и 35, использован накладной задник 43 башмака 3 пользователя экзоскелета, в качестве элемента, на наружной поверхности которого размещен датчик дальности 7, использован накладной носок 42 башмака 3 пользователя экзоскелета, а в качестве подошвенной пластины 8 интегрированной стопы 1 экзоскелета использована подошвенная пластина 32 башмака 3 пользователя экзоскелета.
Анализ данных с датчиков дальности 6, 7 и 35, производящийся в блоке 5 обработки данных, в качестве которого может использоваться микроконтроллер, и в который эти данные от указанных датчиков 6, 7 и 35 подаются по каналу 9 обмена данными, позволяет определить соответствие текущей фазы движения ножной опоры 16 экзоскелета одной из четырех фаз движения относительно опорной поверхности 14: ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета.
Блок 5 обработки данных может быть смонтирован на опорной стойке 4.
При этом, если s1 и s2 больще нуля одновременно, то фазу движения ножной опоры 16 определяют как ПЕРЕНОС, если s1 равно нулю и s2 больще нуля одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА ПЯТКУ, если s1 и s2 равны нулю одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА ВСЮ СТОПУ, а если s1 больше нуля и s2 равно нулю одновременно, то фазу движения ножной опоры 16 определяют как ОПОРА НА НОСОК и для фазы движения ножной опоры ОПОРА НА НОСОК, угол наклона γ0 наружной поверхности 10 носочной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 определяют равным нулю, а угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 вычисляют по формуле
γ1=γ=arctg((s1-s3)/δ)
вычисляют угол γ1 наклона наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности, где 6 - расстояние между первой 27 фронтальной плоскостью и четвертой 37 фронтальной плоскостью интегрированной стопы 1 экзоскелета, проходящей через третью 41 фронтальную ось, а для фаз движения ПЕРЕНОС, ОПОРА НА ПЯТКУ, ОПОРА НА ВСЮ СТОПУ угол наклона γ0 наружной поверхности 10 носочной части и равный ему угол наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 вычисляют по формуле
γ0=γ1=γ=arctg((s1-s3)/δ).
После этого, в том же блоке 5 обработки данных по формуле γ=arctg((s1-s3)/δ)
вычисляют угол γ наклона наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности, где δ - расстояние между первой 27 фронтальной плоскостью и четвертой 37 фронтальной плоскостью интегрированной стопы 1 экзоскелета, проходящей через третью 41 фронтальную ось.
При этом в качестве блока 10 обработки данных может быть использован микроконтроллер, а определение текущей фазы движения ножной опоры 16 и вычисление угла наклона γ1 наружной поверхности 10 пяточной части подошвенной пластины 8 стопы 1 экзоскелета относительно опорной поверхности 14 может быть осуществлено программно.
Полученные в блоке 5 обработки данных данные по каналу 9 обмена данными и, подключенную к нему общую шину (на чертежах не показана),
Из вышеизложенного следует, что предложенные способы определения положения и ориентации стопы и фазы движения ножной опоры экзоскелета по первому и второму вариантам, обеспечивают возможность определения расстояния от заранее выбранных точки или точек наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности, углов наклона наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета относительно опорной поверхности, однозначно определяющих положение и ориентацию стопы экзоскелета относительно опорной поверхности и текущую фазу ножной опоры экзоскелета, что подтверждает достижение заявленного технического результата.
Из вышеизложенного также следует, что предложенная интегрированная стопа экзоскелета в первом и втором вариантах ее выполнения, также обеспечивает возможность определения расстояния от заранее выбранных точки или точек наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности, углов наклона наружной поверхности пяточной и носочной частей подошвенной пластины интегрированной стопы экзоскелета относительно опорной поверхности, однозначно определяющих положение и ориентацию стопы экзоскелета относительно опорной поверхности и текущую фазу ножной опоры экзоскелета, что также подтверждает достижение заявленного технического результата.
Хотя в данном документе были описаны различные стороны осуществления заявленной группы изобретений, специалистам в данной области техники понятно, что возможны другие подходы к осуществлению данного технического решения. Различные стороны и реализация данной группы изобретений изложены в настоящем описании в иллюстративных целях и не подразумевают ограничения, причем объем защиты настоящей группы изобретений указан в нижеследующей формуле изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТОПА ЭКЗОСКЕЛЕТА | 2016 |
|
RU2644547C2 |
| НАКАБЛУЧНИК БАШМАКА ПОЛЬЗОВАТЕЛЯ ЭКЗОСКЕЛЕТА | 2016 |
|
RU2649427C2 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| ПРОТЕЗ СТОПЫ С УПРУГИМ СОЕДИНЕНИЕМ С АДАПТЕРОМ | 2020 |
|
RU2751560C1 |
| Экзоскелет | 2021 |
|
RU2760527C1 |
| Экзоскелет | 2023 |
|
RU2830368C1 |
| ПРОТЕЗ СТОПЫ | 2011 |
|
RU2581493C2 |
| ОБЛЕГЧАЮЩАЯ СТЕЛЬКА ДЛЯ ОБУВИ НА КАБЛУКЕ | 2015 |
|
RU2601252C1 |
| Тренажер для ног и стоп и способ его использования | 2020 |
|
RU2750142C1 |
| ОБУВЬ С АККУМУЛИРОВАНИЕМ ЭНЕРГИИ, СОЗДАВАЕМОЙ ПРИ ДВИЖЕНИИ | 2008 |
|
RU2380995C2 |
Группа изобретений относится к медицине. Интегрированная стопа экзоскелета образована интеграцией башмака пользователя экзоскелета и опорного элемента, выполненного с возможностью соединения с голеностопным шарниром экзоскелета. Подошвенная пластина интегрированной стопы выполнена с возможностью изгиба в области проекции на нее оси изгиба стопы пользователя экзоскелета в области плюснефаланговых суставов. Стопа снабжена датчиками дальности, выполненными с возможностью измерения расстояния от наружной поверхности подошвенной пластины до опорной поверхности в направлении, перпендикулярном указанной наружной поверхности. Обработка данных с датчиков дальности осуществляется в блоке обработки, в качестве которого может использоваться микроконтроллер и в котором определяется соответствие текущего движения ножной опоры экзоскелета одной из четырех фаз движения: ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета, и вычисляются углы наклона наружной поверхности пяточной и носочной частей подошвенной пластины стопы экзоскелета относительно опорной поверхности. Изобретения обеспечивают возможность определять положение и ориентацию стопы относительно опорной поверхности и текущую фазу движения ножной опоры экзоскелета, ортеза или протеза. 4 н. и 38 з.п. ф-лы, 16 ил.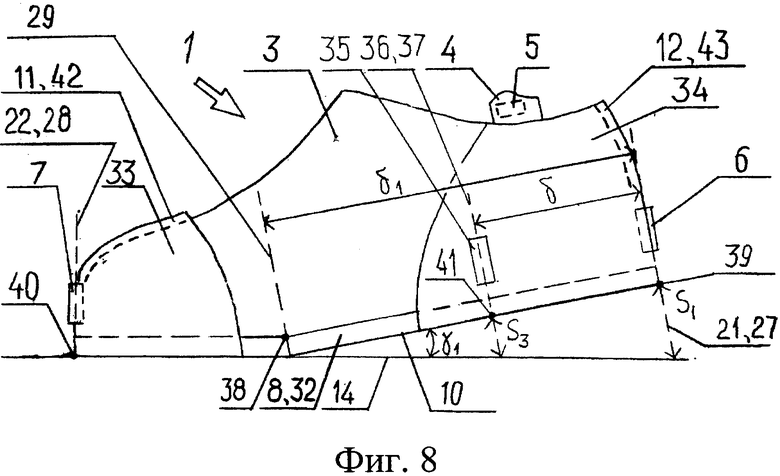
1. Способ определения положения и ориентации стопы и фазы движения ножной опоры экзоскелета при помощи интегрированной стопы экзоскелета, выполненной с возможностью присоединения к голеностопному шарнирному сочленению экзоскелета, проведения измерений данных двумя датчиками, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, и с подошвенной пластиной интегрированной стопы, выполненной с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, включающий проведение указанных измерений, отличающийся тем, что в процессе проведения указанных измерений измеряют расстояния s1 и s2 от первой и, соответственно, второй заранее выбранных и разнесенных в продольном направлении на расстояние δ0 фронтальных осей, принадлежащих наружной поверхности пяточной и, соответственно, носочной частей подошвенной пластины интегрированной стопы, до опорной поверхности в направлении, перпендикулярном указанной наружной поверхности, где δ0 - расстояние между первой и второй фронтальными плоскостями интегрированной стопы, проходящими через вышеупомянутые первую и, соответственно, вторую фронтальные оси, определяют соответствие текущего движения ножной опоры экзоскелета одной из четырех фаз - ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета, и вычисляют угол наклона наружной поверхности подошвенной пластины стопы экзоскелета относительно опорной поверхности, при этом если s1 и s2 больше нуля одновременно, то фазу движения ножной опоры определяют как ПЕРЕНОС, если s1 равно нулю и s2 больше нуля одновременно, то фазу движения ножной опоры определяют как ОПОРА НА ПЯТКУ, если s1 и s2 равны нулю одновременно, то фазу движения ножной опоры определяют как ОПОРА НА ВСЮ СТОПУ, а если s1 больше нуля и s2 равно нулю одновременно, то фазу движения ножной опоры определяют как ОПОРА НА НОСОК, при этом для фаз ПЕРЕНОС, ОПОРА НА ПЯТКУ и ОПОРА НА ВСЮ СТОПУ угол наклона γ0 наружной поверхности носочной части и равный ему угол наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности вычисляют по формуле
γ0=γ1=γ=arctg((s1-s2)/δ0),
а для фазы движения ножной опоры ОПОРА НА НОСОК угол наклона γ0 наружной поверхности носочной части подошвенной пластины стопы экзоскелета относительно опорной поверхности определяют равным нулю, а угол наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности вычисляют по формуле
γ1=arctg(s1/δ1),
где δ1 - расстояние между первой фронтальной плоскостью и третьей фронтальной плоскостью интегрированной стопы экзоскелета, проходящей через проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы.
2. Способ по п. 1, отличающийся тем, что определение текущей фазы движения ножной опоры и вычисление угла наклона γ0 наружной поверхности подошвенной пластины стопы экзоскелета относительно опорной поверхности и угла наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности осуществляют программно.
3. Способ определения положения и ориентации стопы и фазы движения ножной опоры экзоскелета при помощи интегрированной стопы экзоскелета, выполненной с возможностью присоединения к голеностопному шарнирному сочленению экзоскелета, проведения измерений данных двумя датчиками, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, и с подошвенной пластиной интегрированной стопы, выполненной с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, включающий проведение указанных измерений, отличающийся тем, что при проведении указанных измерений измеряют расстояния s1 и s2 от первой и, соответственно, второй заранее выбранных и разнесенных в продольном направлении на расстояние δ0 фронтальных осей, принадлежащих наружной поверхности пяточной и, соответственно, носочной частей подошвенной пластины интегрированной стопы, до опорной поверхности в направлении, перпендикулярном указанной наружной поверхности, где δ0 - расстояние между первой и второй фронтальными плоскостями интегрированной стопы, проходящими через вышеупомянутые первую и, соответственно, вторую фронтальные оси, дополнительно измеряют расстояние s3 от третьей заранее выбранной фронтальной оси, также принадлежащей наружной поверхности пяточной части подошвенной пластины интегрированной стопы, но не совпадающей с первой фронтальной осью, до опорной поверхности в направлении, перпендикулярном указанной наружной поверхности, определяют соответствие текущего движения ножной опоры экзоскелета одной из четырех фаз - ПЕРЕНОС, ОПОРА НА ПЯТКУ стопы экзоскелета, ОПОРА НА ВСЮ СТОПУ экзоскелета и ОПОРА НА НОСОК стопы экзоскелета, при этом если s1 и s2 больше нуля одновременно, то фазу движения ножной опоры определяют как ПЕРЕНОС, если s1 равно нулю и s2 больше нуля одновременно, то фазу движения ножной опоры определяют как ОПОРА НА ПЯТКУ, если s1 и s2 равны нулю одновременно, то фазу движения ножной опоры определяют как ОПОРА НА ВСЮ СТОПУ, а если s1 больше нуля и s2 равно нулю одновременно, то фазу движения ножной опоры определяют как ОПОРА НА НОСОК и для фазы движения ножной опоры ОПОРА НА НОСОК, угол наклона γ0 наружной поверхности носочной части подошвенной пластины стопы экзоскелета относительно опорной поверхности определяют равным нулю, а угол наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности вычисляют по формуле
γ1=γ=arctg((s1-s3)/δ),
где δ - расстояние между первой фронтальной плоскостью и третьей фронтальной плоскостью интегрированной стопы экзоскелета, проходящей через третью фронтальную ось, а для фаз движения ПЕРЕНОС, ОПОРА НА ПЯТКУ, ОПОРА НА ВСЮ СТОПУ угол наклона γ0 наружной поверхности носочной части и равный ему угол наклона y1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности вычисляют по формуле
γ0=γ1=γ=arctg((s1-s3)/δ).
4. Способ по п. 3, отличающийся тем, что определение текущей фазы движения ножной опоры и вычисление угла наклона γ1 наружной поверхности пяточной части подошвенной пластины стопы экзоскелета относительно опорной поверхности осуществляют программно.
5. Интегрированная стопа экзоскелета, включающая башмак пользователя экзоскелета и соединенный с ним опорный элемент, выполненный с возможностью присоединения к голеностопному шарнирному сочленению экзоскелета, блок обработки данных и соединенные с ним два датчика, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, при этом подошвенная пластина интегрированной стопы выполнена с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, отличающаяся тем, что в качестве указанных датчиков использованы датчики дальности от наружной поверхности подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности по осям указанных датчиков дальности в направлении, перпендикулярном указанной наружной поверхности.
6. Интегрированная стопа экзоскелета по п. 5, отличающаяся тем, что опорный элемент размещен внутри башмака пользователя экзоскелета.
7. Интегрированная стопа экзоскелета по п. 6, отличающаяся тем, что подошвенная пластина башмака пользователя экзоскелета использована в качестве подошвенной пластины интегрированной стопы.
8. Интегрированная стопа экзоскелета по п. 7, отличающаяся тем, что задник башмака пользователя экзоскелета использован в качестве задника интегрированной стопы.
9. Интегрированная стопа экзоскелета по п. 7, отличающаяся тем, что носок башмака пользователя экзоскелета использован в качестве носка интегрированной стопы.
10. Интегрированная стопа экзоскелета по п. 5, отличающаяся тем, что башмак пользователя размещен на опорном элементе.
11. Интегрированная стопа экзоскелета по п. 10, отличающаяся тем, что опорный элемент использован в качестве подошвенной пластины интегрированной стопы.
12. Интегрированная стопа экзоскелета по п. 11, отличающаяся тем, что интегрированная стопа снабжена задником интегрированной стопы, смонтированным на пяточной части подошвенной пластины интегрированной стопы.
13. Интегрированная стопа экзоскелета по п. 11, отличающаяся тем, что интегрированная стопа снабжена носком интегрированной стопы, смонтированным на носочной части подошвенной пластины интегрированной стопы.
14. Интегрированная стопа экзоскелета по п. 5, отличающаяся тем, что в качестве указанных датчиков дальности использованы оптические датчики дальности.
15. Интегрированная стопа экзоскелета по п. 8 или 12, отличающаяся тем, что задник интегрированной стопы экзоскелета выполнен из формоустойчивого материала.
16. Интегрированная стопа экзоскелета по п. 9 или 13, отличающаяся тем, что носок интегрированной стопы экзоскелета выполнен из формоустойчивого материала.
17. Интегрированная стопа экзоскелета по п. 15, отличающаяся тем, что первый датчик дальности от наружной поверхности подошвенной пластины интегрированной стопы до опорной поверхности смонтирован на наружной поверхности задника интегрированной стопы экзоскелета.
18. Интегрированная стопа экзоскелета по п. 16, отличающаяся тем, что второй датчик дальности от наружной поверхности подошвенной пластины интегрированной стопы до опорной поверхности смонтирован на наружной поверхности носка интегрированной стопы экзоскелета.
19. Интегрированная стопа экзоскелета по п. 5, отличающаяся тем, что опорный элемент присоединен к голеностопному шарнирному сочленению экзоскелета посредством опорной стойки.
20. Интегрированная стопа экзоскелета по п. 5, отличающаяся тем, что первый и второй датчики дальности соединены с блоком обработки данных посредством канала обмена данными.
21. Интегрированная стопа экзоскелета по п. 5, отличающаяся тем, что в качестве блока обработки данных использован микроконтроллер.
22. Интегрированная стопа экзоскелета по п. 5, отличающаяся тем, что башмак пользователя экзоскелета снабжен накладным задником, жестко соединенным с подошвенной пластиной башмака пользователя и использованным в качестве задника интегрированной стопы экзоскелета.
23. Интегрированная стопа экзоскелета по п. 5, отличающаяся тем, что башмак пользователя экзоскелета снабжен накладным носком, жестко соединенным с подошвенной пластиной башмака пользователя и использованным в качестве носка интегрированной стопы экзоскелета.
24. Интегрированная стопа экзоскелета, включающая башмак пользователя экзоскелета и соединенный с ним опорный элемент, выполненный с возможностью присоединения к голеностопному шарнирному сочленению экзоскелета, блок обработки данных и соединенные с ним два датчика, первый из которых смонтирован на пяточной части интегрированной стопы, а второй - на ее носочной части, при этом подошвенная пластина интегрированной стопы выполнена с возможностью изгиба в области, включающей проекцию оси изгиба стопы пользователя в тыльном направлении в области плюснефаланговых суставов на подошвенную пластину интегрированной стопы, отличающаяся тем, что она дополнительно снабжена третьим датчиком, также смонтированным на пяточной части интегрированной стопы, но разнесенным с первым датчиком в продольном направлении, а в качестве первого, второго и третьего вышеперечисленных датчиков использованы датчики дальности от наружной поверхности подошвенной пластины интегрированной стопы экзоскелета до опорной поверхности по осям указанных датчиков дальности в направлении, перпендикулярном указанной наружной поверхности.
25. Интегрированная стопа экзоскелета по п. 24, отличающаяся тем, что опорный элемент размещен внутри башмака пользователя экзоскелета.
26. Интегрированная стопа экзоскелета по п. 25, отличающаяся тем, что подошвенная пластина башмака пользователя экзоскелета использована в качестве подошвенной пластины интегрированной стопы.
27. Интегрированная стопа экзоскелета по п. 26, отличающаяся тем, что задник башмака пользователя экзоскелета использован в качестве задника интегрированной стопы.
28. Интегрированная стопа экзоскелета по п. 26, отличающаяся тем, что носок башмака пользователя экзоскелета использован в качестве носка интегрированной стопы.
29. Интегрированная стопа экзоскелета по п. 24, отличающаяся тем, что башмак пользователя размещен на опорном элементе.
30. Интегрированная стопа экзоскелета по п. 29, отличающаяся тем, что опорный элемент использован в качестве подошвенной пластины интегрированной стопы.
31. Интегрированная стопа экзоскелета по п. 30, отличающаяся тем, что интегрированная стопа снабжена задником интегрированной стопы, смонтированным на пяточной части подошвенной пластины интегрированной стопы.
32. Интегрированная стопа экзоскелета по п. 30, отличающаяся тем, что интегрированная стопа снабжена носком интегрированной стопы, смонтированным на носочной части подошвенной пластины интегрированной стопы.
33. Интегрированная стопа экзоскелета по п. 24, отличающаяся тем, что в качестве указанных датчиков дальности использованы оптические датчики дальности.
34. Интегрированная стопа экзоскелета по п. 27 или 31, отличающаяся тем, что задник интегрированной стопы экзоскелета выполнен из формоустойчивого материала.
35. Интегрированная стопа экзоскелета по п. 28 или 32, отличающаяся тем, что носок интегрированной стопы экзоскелета выполнен из формоустойчивого материала.
36. Интегрированная стопа экзоскелета по п. 34, отличающаяся тем, что первый и третий датчики дальности от наружной поверхности подошвенной пластины интегрированной стопы до опорной поверхности смонтированы на наружной поверхности задника интегрированной стопы экзоскелета.
37. Интегрированная стопа экзоскелета по п. 35, отличающаяся тем, что второй датчик дальности от наружной поверхности подошвенной пластины интегрированной стопы до опорной поверхности смонтирован на наружной поверхности носка интегрированной стопы экзоскелета.
38. Интегрированная стопа экзоскелета по п. 24, отличающаяся тем, что опорный элемент присоединен к голеностопному шарнирному сочленению экзоскелета посредством опорной стойки.
39. Интегрированная стопа экзоскелета по п. 24, отличающаяся тем, что первый, второй и третий датчики дальности соединены с блоком обработки данных посредством канала обмена данными.
40. Интегрированная стопа экзоскелета по п. 24, отличающаяся тем, что в качестве блока обработки данных использован микроконтроллер.
41. Интегрированная стопа экзоскелета по п. 24, отличающаяся тем, что башмак пользователя экзоскелета снабжен накладным задником, жестко соединенным с подошвенной пластиной башмака пользователя и использованным в качестве задника интегрированной стопы экзоскелета.
42. Интегрированная стопа экзоскелета по п. 24, отличающаяся тем, что башмак пользователя экзоскелета снабжен накладным носком, жестко соединенным с подошвенной пластиной башмака пользователя и использованным в качестве носка интегрированной стопы экзоскелета.
| US 20140088729 A1, 27.03.2014 | |||
| СТОПА ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1993 |
|
RU2061444C1 |
| US 9289315 B2, 22.03.2016 | |||
| US 20050107889 A1, 19.05.2005 | |||
| US 20090204230 A1, 13.08.2009 | |||
| US 20160158032 A1, 09.06.2016. | |||

