Область техники, к которой относится изобретение
Изобретение относится к робототехнике и мехатронике и может быть использовано для повышения комфортабельности внешних экзоскелетных устройств, увеличивающих силу и выносливость человека за счёт внешнего гибкого каркаса.
Уровень техники
Известен грузовой экзоскелет с настройкой под антропометрические параметры пользователя (патент RU № 2665116, публ. 28.08.2018, МПК A61H3/00), который содержит одну пару ножных опор с элементами крепления к ногам человека, одну пару опор стоп, тазовый узел со смонтированными на нем боковыми и задними тазовыми шарнирами, одну пару соединительных элементов и по одной паре бедренных и голенных звеньев. Пара ножных опор включает по одной паре коленных и голеностопных шарнирных сочленений. Один конец каждого из соединительных элементов соединен с боковым тазовым шарниром. Также грузовой экзоскелет содержит одну пару бедренных шарниров - первых кинематических пар, элементы которых - дуговые направляющие в форме дуг соосных окружностей - выполнены в корпусе бедренных шарниров, смонтированном на соответствующем бедренном звене. Другой элемент выполнен с возможностью перемещения по указанной дуговой направляющей и соединен с другим концом вышеуказанного соединительного элемента с возможностью настройки под антропометрические параметры пользователя. Экзоскелет позволяет регулировать величины обхвата нижней и верхней частей и длины бедер, обхвата нижней и верхней частей и длины голеней и величины обхвата пяточной части и высоты стопы человека.
Недостатком данного технического решения является сложность конструкции, снижающая качество движения человека в нем вследствие того, что данная конструкция имеет большую массу. Кроме того, у данного устройства имеются ограничения подвижности звеньев человека, низкие динамические характеристики, достаточно узкая область применения и создается дополнительная нагрузка на мышцы опорно-двигательного аппарата человека.
Наиболее близким по технической сущности к предлагаемому изобретению является экзоскелет (патент RU № 2760527, публ. 26.11.2021, МПК A61H3/00), который содержит раму с закрепленным сверху упругим корсетом, выполненным в виде левой и правой дуг жесткости, соединенных опорным кольцом. Левая и правая дуги жесткости предназначены для фиксации позвоночника, а опорное кольцо выполнено с возможностью крепления верхних экзоконечностей. Снизу к раме присоединены идентичные левая и правая нижние экзоконечности. При этом каждая нижняя экзоконечность содержит прикрепленное к раме бедро, голень, к которой, в свою очередь, снизу сзади присоединена пяточная кость, а спереди - плюсна с фалангами пальцев. Соединение рамы дуг жесткости, опорного кольца, бедра, голени, пяточной кости, плюсны, фаланг пальцев, бедра, голени, пяточной кости, плюсны, фаланг пальцев обеспечено шарниром, выполненным в виде расположенных между соединяемыми элементами первого и второго цилиндрических шарниров, установленных взаимно перпендикулярно и закрепленных на концах элементов экзоскелета. На первом и втором цилиндрических шарнирах установлены попарно идентичные пружины кручения для компенсации гравитационных нагрузок. Своими концами пружины кручения крепятся к звеньям, соединяемым шарниром, регулируя положения звеньев друг относительно друга и компенсируя гравитационные нагрузки. Бедра, голени, пяточные кости, плюсны, фаланги пальцев выполнены в виде звеньев, у которых со стороны расположенного ниже элемента имеется участок переменной длины, который содержит корпус с расположенным внутри него штоком, выполненным с возможностью возвратно-поступательного движения посредством закрепленной на корпусе пружины сжатия-растяжения для накопления и дальнейшего использования энергии опорно-двигательного аппарата человека. При этом со стороны участка переменной длины указанных элементов, их концом для соединения с соседним элементом является шток.
Недостатками данного технического решения являются низкая управляемость и неустойчивость движения человека в экзоскелете.
Раскрытие сущности изобретения
Технической задачей предлагаемого изобретения является повышение управляемости экзоскелета при движениях человека.
Технический результат заключается в реализации переменной жесткости конструкции звеньев нижней части опорно-двигательного аппарата человека и корпуса.
Это достигается тем, что в известном экзоскелете, содержащем раму, на которой сверху закреплен модуль для корпуса человека, снизу к раме присоединены идентичные правая и левая нижние конечности экзоскелета, каждая из которых содержит соединенные шарнирным соединением бедро, голень и стопу, причем бедра и голени выполнены в виде звеньев переменной длины, а шарнирное соединение выполнено в виде расположенных между соединяемыми элементами цилиндрических шарниров, установленных взаимно перпендикулярно и закрепленных на концах соединяемых элементов, при этом бедра и голени содержат участок переменной длины, модуль для корпуса человека выполнен в виде взаимно соединенных шарнирным соединением передней правой, передней левой, задней правой и задней левой стоек, правой и левой дуг жесткости, переднего и заднего ребер жесткости для фиксации позвоночника, при этом передняя правая, передняя левая, задняя правая, задняя левая стойки выполнены в виде звеньев переменной длины и жесткости и содержат участок переменной длины, причем участок переменной длины выполнен в виде цилиндрического корпуса с намотанными на цилиндрическом корпусе катушками для создания магнитного поля, полностью заполненного магнитнореологической жидкостью с расположенным внутри цилиндра поршнем с отверстиями для перетекания магнитно-реологической жидкости и штоком, на цилиндрическом корпусе установлена крышка в виде фланца для герметизации и предотвращения поворотов штока относительно цилиндрического корпуса, на внутреннем отверстии фланца нарезаны шлицы для перемещения штока, при этом правая и левая дуги жесткости, передние и задние ребра жесткости выполнены с возможностью креплений опоры для корпуса человека и верхних конечностей экзоскелета.
Краткое описание чертежей
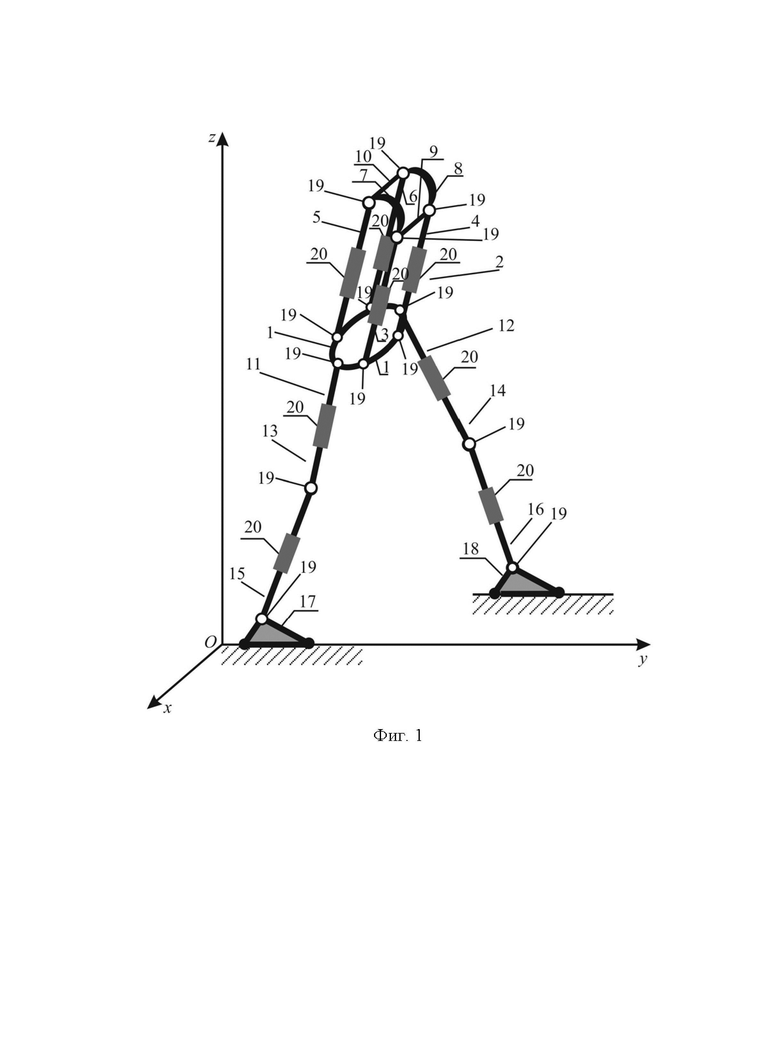
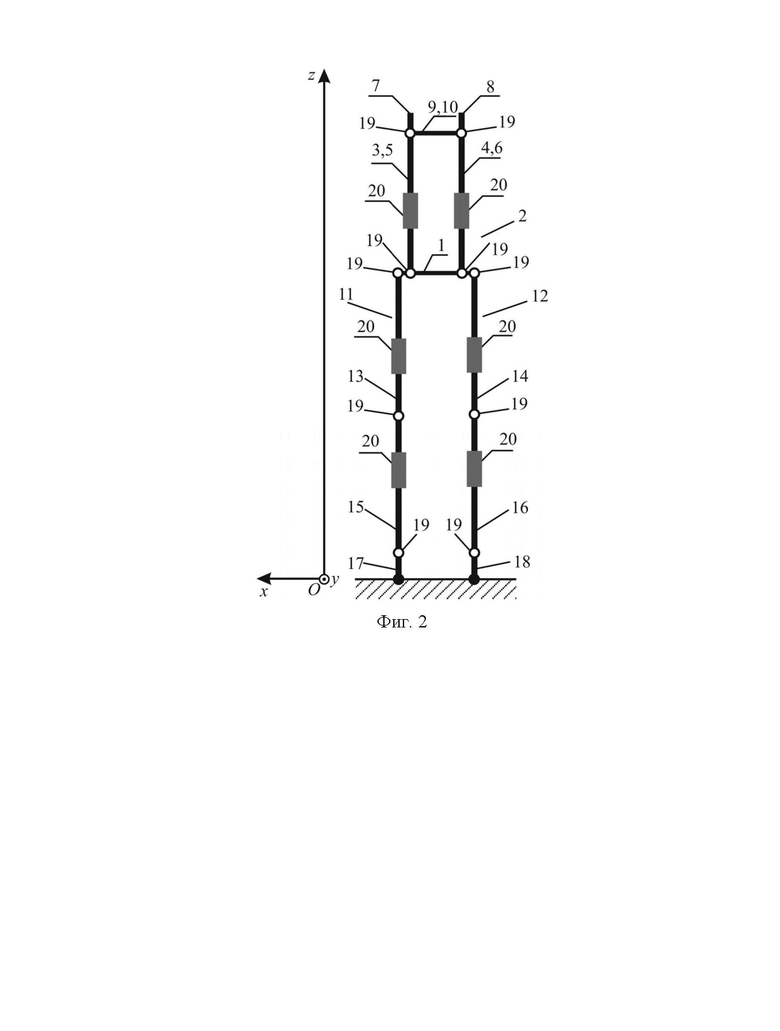
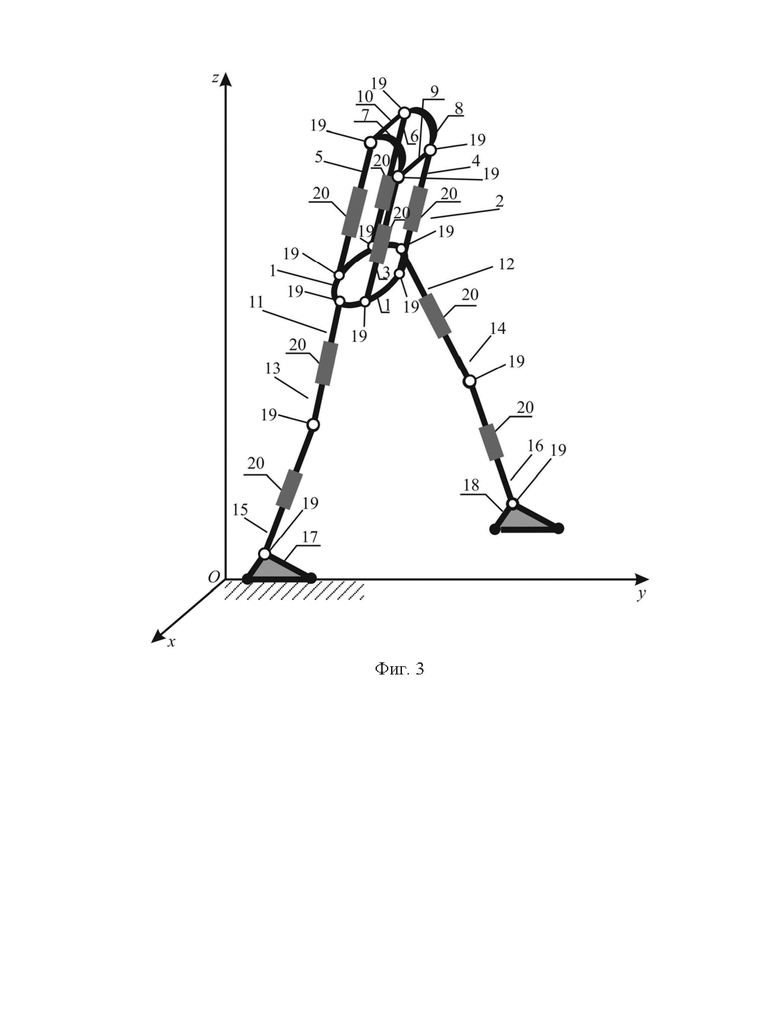
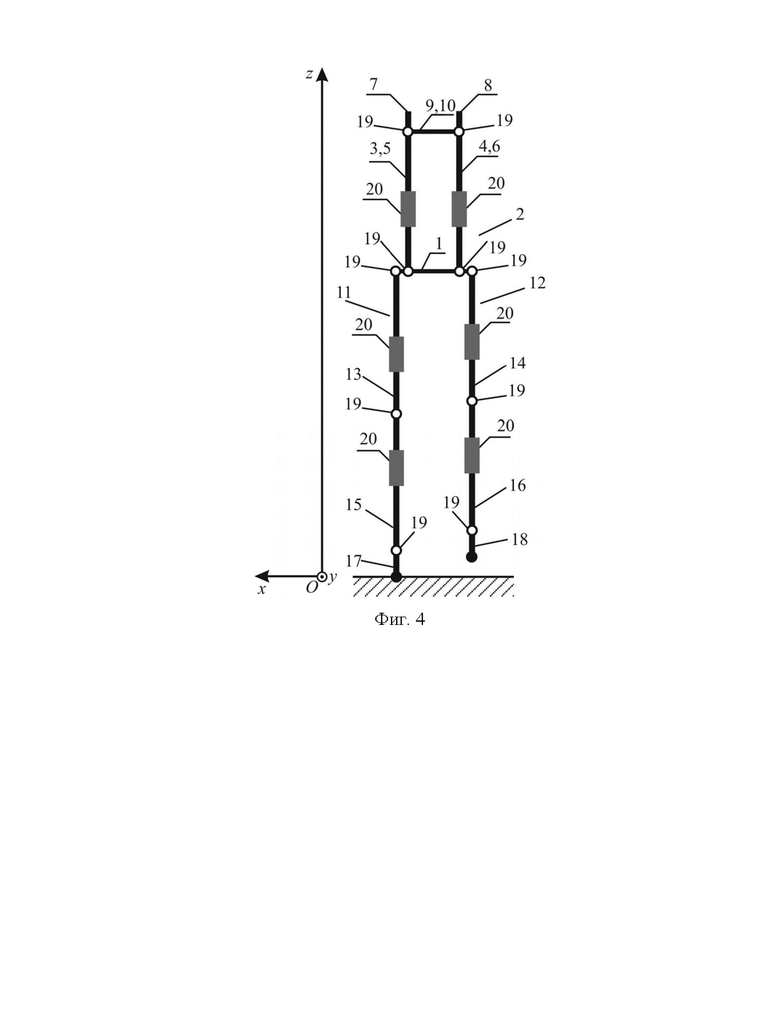
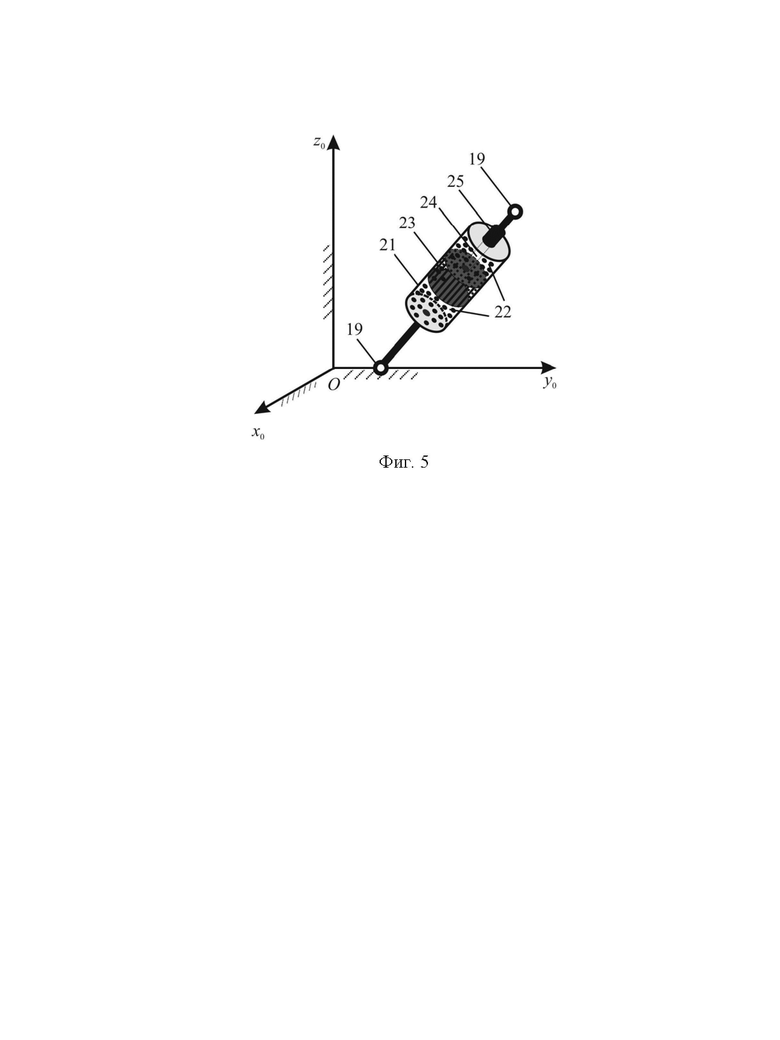
Сущность изобретения поясняется чертежами, где на фиг. 1 представлен вид сбоку экзоскелета в двухопорной фазе ходьбы в статике, на фиг. 2 изображен вид спереди (фас) экзоскелета в двухопорной фазе ходьбы в статике, на фиг. 3 показан вид сбоку экзоскелета в одноопорной фазе ходьбы в динамике, на фиг. 4 изображен вид спереди экзоскелета в динамике, на фиг. 5 представлена модель звена переменной длины с регулируемой жесткостью на основе магнитно-реологической жидкости.
Осуществление изобретения
Экзоскелет содержит раму 1, на которой сверху закреплен модуль для корпуса человека 2, выполненный в виде передней правой 3, передней левой 4, задней правой 5 и задней левой 6 стоек переменной длины с регулируемой жесткостью, соединенных правой 7 и левой 8 дугами жесткости, передним 9 и задним 10 ребрами жесткости. Передняя правая 3, передняя левая 4, задняя правая 5 и задняя левая 6 стойки выполнены с возможностью фиксации позвоночника, минимально ограничивая при этом его степени подвижности. Правая 7 и левая 8 дуги жесткости совместно с передним 9 и задним 10 ребрами жесткости выполнены с возможностью креплений дополнительной опоры для корпуса человека, верхних конечностей экзоскелета, поддерживающего устройства для головы пользователя (например, с помощью цилиндрических шарниров).
Снизу к раме 1 присоединены идентичные правая 11 и левая 12 нижние конечности экзоскелета. При этом правая нижняя конечность экзоскелета 11 содержит присоединенное к раме 1 правое бедро 13. Левая нижняя конечность экзоскелета 12 содержит присоединенное к раме 1 левое бедро 14. К правому бедру 13 подсоединена снизу правая голень 15, к левому бедру 14 подсоединена снизу левая голень 16. К правой голени 15 снизу присоединена правая стопа 17, к левой голени 16 снизу присоединена левая стопа 18.
Передняя правая 3, передняя левая 4, задняя правая 5, задняя левая 6 стойки, правое 13 и левое 14 бедра, правая 15 и левая 16 голени, выполнены в виде звеньев переменной длины.
Соединение рамы 1, передней правой 3, передней левой 4, задней правой 5 и задней левой 6 стоек, правой 7 и левой 8 дуг жесткости, передним 9 и задним 10 ребрами жесткости, правого бедра 13, правой голени 15, правой стопы 17, левого бедра 14, левой голени 16, левой стопы 18 обеспечено шарнирным соединением 19, выполненным в виде расположенных между соединяемыми элементами цилиндрических шарниров, установленных взаимно перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета и закрепленных на концах соединяемых звеньев переменной длины экзоскелета.
Звенья переменной длины (передняя правая 3, передняя левая 4, задняя правая 5, задняя левая 6 стойки, правое 13 и левое 14 бедра, правая 15 и левая 16 голени) содержат в средине участок переменной длины 20, выполненный в виде цилиндрического корпуса 21 с намотанными на нем катушками для создания магнитного поля, полностью заполненного магнитно-реологической жидкостью 22 с расположенным внутри цилиндра поршнем 23 с микроотверстиями для перетекания магнитно-реологической жидкости и штоком 24. На цилиндрическом корпусе 21 установлена крышка в виде фланца 25 для герметизации и предотвращения относительных поворотов штока 24 относительно цилиндрического корпуса 21. На внутреннем отверстии фланца 25 нарезаны шлицы для относительного перемещения штока.
Крепление элементов экзоскелета к человеку выполнено в виде тканевых элементов с фиксаторами.
Экзоскелет работает следующим образом.
В начальный момент времени человек располагается внутри экзоскелета. Нагрузка от корпуса и рук человека распределяется на раму 1, переднюю правую 3, переднюю левую 4, заднюю правую 5 и заднюю левую 6 стойки, правую 7 и левую 8 дуги жесткости, передним 9 и задним 10 ребрами жесткости.
Нагрузка от ног человека распределяется на правую 11 и левую 12 нижние конечности экзоскелета. Поддержание позы человека и помощь мышцам опорно-двигательного аппарата человека осуществляется за счет участков переменной длины 20, в которых в статике к магнитно-реологической жидкости 22 приложено магнитное поле, поршень 23 не движется и звенья становятся жесткими, выдерживая вес человека и полезной нагрузки.
В динамике, для того, чтобы сделать первый шаг, как при обычной ходьбе без вспомогательных устройств, из статического положения неустойчивого равновесия человек выходит, немного наклоняясь вперед и отталкиваясь одной из ног от опоры. При отталкивании магнитное поле в опорной ноге остается постоянным, обеспечивая жесткость магнитно-реологической жидкости 22 и всего звена. Магнитное поле в переносимой ноге ослабевает, магнитно-реологическая жидкость 22 становится жидкой, поршень 23 перемещается в цилиндре вместе со штоком 24, что обеспечивает синхронное удлинение конечности экзоскелета совместно с конечностью опорно-двигательного аппарата человека (фиг. 3 и 4), так как движение при этом является близким к баллистическому. В момент постановки ноги на опору, магнитное поле усиливается, магнитно-реологическая жидкость 22 увеличивает свою вязкость, позволяя звену изменять свою длину в соответствии с изменением длины звена человека, рассеивая энергию удара и снижая ударные ускорения и нагрузки на опорно-двигательный аппарат человека. В момент максимальной нагрузки на опорную ногу магнитное поле принимает максимальное значение, и магнитно-реологическая жидкость 22 становится жесткой, блокируя перемещения поршня 23. При этом звено снимает частично или полностью нагрузку с опорной ноги человека. Таким образом, звенья экзоскелета способствуют поворотам звеньев ног человека в физиологически правильном положении. Затем цикл повторяется.
Вследствие изменения длин звеньев на участках переменной длины 20 повышается комфортабельность экзосклета при его эксплуатации человеком. В результате использования магнитно-реологической жидкости 22, которая представляет собой в данном случае вязкоупругий управляемый элемент, экзоскелет работает синхронно с опорно-двигательным аппаратом человека в плане управляемого изменения длин звеньев. При этом повышается комфортабельность использования экзоскелета, снимается часть нагрузки на мышцы опорно-двигательного аппарата человека, снижаются затраты энергии в опорно-двигательном аппарате человека при движении в экзоскелете, тем самым увеличивается выносливость человека и время непрерывной работы.
Экспериментально установлено, что для взрослого человека массой тела от 50 кг до 100 кг, средние параметры предложенного экзоскелета следующие: голень 0,385 м, бедро 0,477 м, корпус 0,771 м, максимальная амплитуда движения поршня 23 внутри цилиндра 21 равны: для голени 0,008 м, для бедра 0,01 м, для корпуса 0,19 м, максимальные скорости движения поршня 23 внутри цилиндра 21 равны: для голени 0,4 м/с, для бедра 0,5 м/с, для корпуса 0,6 м/с, максимальные ускорения движения поршня 23 внутри цилиндра 21 равны: для голени 6,0 м/с2, для бедра 6,0 м/с2, для корпуса 6,5 м/с2, максимальные силы сопротивления, реализуемые в звеньях экзоскелета магнитно-реологической жидкостью для голени опорной ноги до 5000 Н, для бедра до 4500 Н, для корпуса до 2000 Н.
По сравнению с прототипом, предлагаемое изобретение обеспечивает повышение управляемости и устойчивости экзоскелета при движениях человека и, как следствие, синхронизацию работы экзоскелета с опорно-двигательным аппаратом человека, что позволяет разгрузить опорно-двигательный аппарат, повысить комфортабельность использования экзоскелета. В данном техническом устройстве имеется возможность регулировать жесткость звена в процессе выполнения движений в зависимости от фазы ходьбы, реализовывать демпфирование и гасить возможные дополнительные колебания, а также снизить шум при движении.
Использование изобретения позволяет повысить управляемость и устойчивость экзоскелета при движениях человека за счет реализации переменной жесткости (на основе магнитно-реологической жидкости) конструкции звеньев нижней части опорно-двигательного аппарата человека и корпуса в процессе выполнения движений в зависимости от фазы ходьбы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экзоскелет | 2021 |
|
RU2760527C1 |
| Экзоскелет | 2023 |
|
RU2823489C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| УСТРОЙСТВО РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С НАРУШЕНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2765403C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| Промышленный экзоскелет для верхних и нижних конечностей | 2021 |
|
RU2793174C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| Экзоскелет для спины человека | 2024 |
|
RU2838297C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
Изобретение относится к медицинской технике, а именно к экзоскелетам. Экзоскелет содержит раму, на которой сверху закреплен модуль для корпуса человека. Снизу к раме присоединены идентичные правая и левая нижние конечности экзоскелета, каждая из которых содержит соединенные шарнирным соединением бедро, голень и стопу. Бедра и голени выполнены в виде звеньев переменной длины, а шарнирное соединение выполнено в виде расположенных между соединяемыми элементами цилиндрических шарниров, установленных взаимно перпендикулярно и закрепленных на концах соединяемых элементов. Бедра и голени содержат участок переменной длины. Модуль для корпуса человека выполнен в виде взаимно соединенных шарнирным соединением передней правой, передней левой, задней правой и задней левой стоек, правой и левой дуг жесткости, переднего и заднего ребер жесткости для фиксации позвоночника. Передняя правая, передняя левая, задняя правая, задняя левая стойки выполнены в виде звеньев переменной длины и жесткости и содержат участок переменной длины. Участок переменной длины выполнен в виде цилиндрического корпуса с намотанными на цилиндрическом корпусе катушками для создания магнитного поля, полностью заполненного магнитно-реологической жидкостью с расположенным внутри цилиндра поршнем с отверстиями для перетекания магнитно-реологической жидкости и штоком, на цилиндрическом корпусе установлена крышка в виде фланца для герметизации и предотвращения поворотов штока относительно цилиндрического корпуса. На внутреннем отверстии фланца нарезаны шлицы для перемещения штока. Правая и левая дуги жесткости, передние и задние ребра жесткости выполнены с возможностью креплений опоры для корпуса человека и верхних конечностей экзоскелета. Техническим результатом является реализация переменной жесткости конструкции звеньев нижней части и корпуса. 5 ил.
Экзоскелет, содержащий раму, на которой сверху закреплен модуль для корпуса человека, снизу к раме присоединены идентичные правая и левая нижние конечности экзоскелета, каждая из которых содержит соединенные шарнирным соединением бедро, голень и стопу, причем бедра и голени выполнены в виде звеньев переменной длины, а шарнирное соединение выполнено в виде расположенных между соединяемыми элементами цилиндрических шарниров, установленных взаимно перпендикулярно и закрепленных на концах соединяемых элементов, при этом бедра и голени содержат участок переменной длины, отличающийся тем, что модуль для корпуса человека выполнен в виде взаимно соединенных шарнирным соединением передней правой, передней левой, задней правой и задней левой стоек, правой и левой дуг жесткости, переднего и заднего ребер жесткости для фиксации позвоночника, при этом передняя правая, передняя левая, задняя правая, задняя левая стойки выполнены в виде звеньев переменной длины и жесткости и содержат участок переменной длины, причем участок переменной длины выполнен в виде цилиндрического корпуса с намотанными на цилиндрическом корпусе катушками для создания магнитного поля, полностью заполненного магнитно-реологической жидкостью с расположенным внутри цилиндра поршнем с отверстиями для перетекания магнитно-реологической жидкости и штоком, на цилиндрическом корпусе установлена крышка в виде фланца для герметизации и предотвращения поворотов штока относительно цилиндрического корпуса, на внутреннем отверстии фланца нарезаны шлицы для перемещения штока, при этом правая и левая дуги жесткости, передние и задние ребра жесткости выполнены с возможностью креплений опоры для корпуса человека и верхних конечностей экзоскелета.
| US10485681B2, 26.11.2019 | |||
| US9610208B2, 04.04.2017 | |||
| US11491032B2, 08.11.2022 | |||
| US11478366B2, 25.10.2022 | |||
| CN114404232A, 29.04.2022 | |||
| US20140358053A1, 04.12.2014. |

