Изобретение относится к робототехническим устройствам двойного назначения и может быть использовано для увеличения силы, выносливости и восстановления двигательных способностей человека за счет внешнего каркаса.
Известен экзоскелет, описанный в патенте RU №2489130 (публ. 10.08.2013, МПК А61Н 3/00) на изобретение «Простая конструкция компенсации веса человека при ходьбе и беге», который содержит седло, соединенную с ним раму, тазобедренные шарниры экзоног, экзоноги, накопитель упругой энергии, шарниры, обеспечивающие стопе и связанной с ней опоре экзоноги наклоны и кручение. Для каждой экзоноги имеются стопоры обратного хода, подступник, обеспечивающий управление подъемом ноги, пружины возврата ноги вверх, тазобедренные шарниры экзоног с двумя или тремя степенями свободы. Накопитель упругой энергии используют в качестве основного элемента, компенсирующего подъем и опускание центра тяжести пользователя и его груза, который обеспечивает упругую силу между точкой около стопы, ближе к мыску, и центром вращения экзоног, расположенным либо в паховой области, либо выше тазобедренных суставов.
Недостатком данного технического решения является низкое качество движения человека в нем вследствие того, что данная конструкция имеет минимальное число шарниров, которые обеспечивают только 3 степени свободы между конечной точкой, соприкасающейся с землей и «центром вращения экзоноги» - вперед, вбок, вверх (xyz). Также у данного устройства ограничена подвижность ног человека, узкая область применения и создается дополнительная нагрузка на мышцы опорно-двигательного аппарата человека.
Наиболее близким по технической сущности к предлагаемому изобретению является экзоскелет (патент RU №2567589, публ. 10.11.2015, МПК А61Н 3/00), который содержит корсет, траверсу, вмонтированную в него, закрепленную на тазобедренной части, опирающуюся своими концами на составленные из звеньев опорные стойки, башмаки, связанные со стойками, шарниры и упорные подшипники, размещенные на траверсе и башмаках, в которых вращаются цапфы кривошипов, установленных на концах стоек, ведущий вал, вращающийся в установленном на траверсе шарнире, механизм синхронного поворота кривошипов, соединенный посредством рычагов с мышцами человека, являющимися приводом, и дополнительный привод с блоком питания. Траверса с башмаками связана упругими муфтами и демпферами.
Недостатками данного технического решения являются низкие динамические характеристики и эксплуатационные возможности, малое время автономной работы, сложность и громоздкость конструкции.
Технической задачей предлагаемого изобретения является перераспределение нагрузки на элементы опорно-двигательного аппарата человека за счет рекуперации энергии и компенсации гравитационных нагрузок экзоскелетом.
Технический результат заключается в повышении комфортабельности эксплуатации экзоскелета, упрощении его конструкции, увеличении силы, выносливости человека и времени непрерывной работы в экзоскелете.
Это достигается тем, что известный экзоскелет, содержащий раму, на которой сверху закреплен упругий корсет, выполненный в виде левой и правой дуг жесткости для поддержки или фиксации позвоночника, соединенных опорным кольцом, выполненным с возможностью крепления верхних экзоконечностей, снизу к раме присоединены идентичные левая и правая нижние экзоконечности, каждая из которых содержит присоединенное к раме бедро, соединенную с ним снизу голень, к которой, в свою очередь, снизу присоединена стопа, при этом стопа выполнена в виде присоединенных к голени сзади пяточной кости, а спереди соединенной с ней плюсны, к которой присоединены фаланги пальцев, причем на пяточных костях и фалангах пальцев расположены экзоподошвы, соединение рамы, левой и правой дуг жесткости, опорного кольца, бедер, голеней, пяточных костей, плюсен и фаланг пальцев обеспечено шарнирным соединением, выполненным в виде расположенных между соединяемыми элементами первого и второго цилиндрических шарниров, установленных взаимно-перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета, причем на первом и втором цилиндрических шарнирах установлены попарно идентичные пружины кручения, своими концами закрепленные на концах соединяемых элементов, бедра, голени, пяточные кости, плюсны, фаланги пальцев выполнены в виде звеньев, у которых со стороны расположенного ниже элемента выполнен участок переменной длины, который содержит корпус с расположенным внутри него штоком, выполненным с возможностью возвратно-поступательного движения посредством закрепленной на корпусе пружины сжатия-растяжения, при этом со стороны участка переменной длины указанных элементов, их концом для соединения с соседним элементом является шток, экзоподошва выполнена эластичной, например, из термоэластопластов.
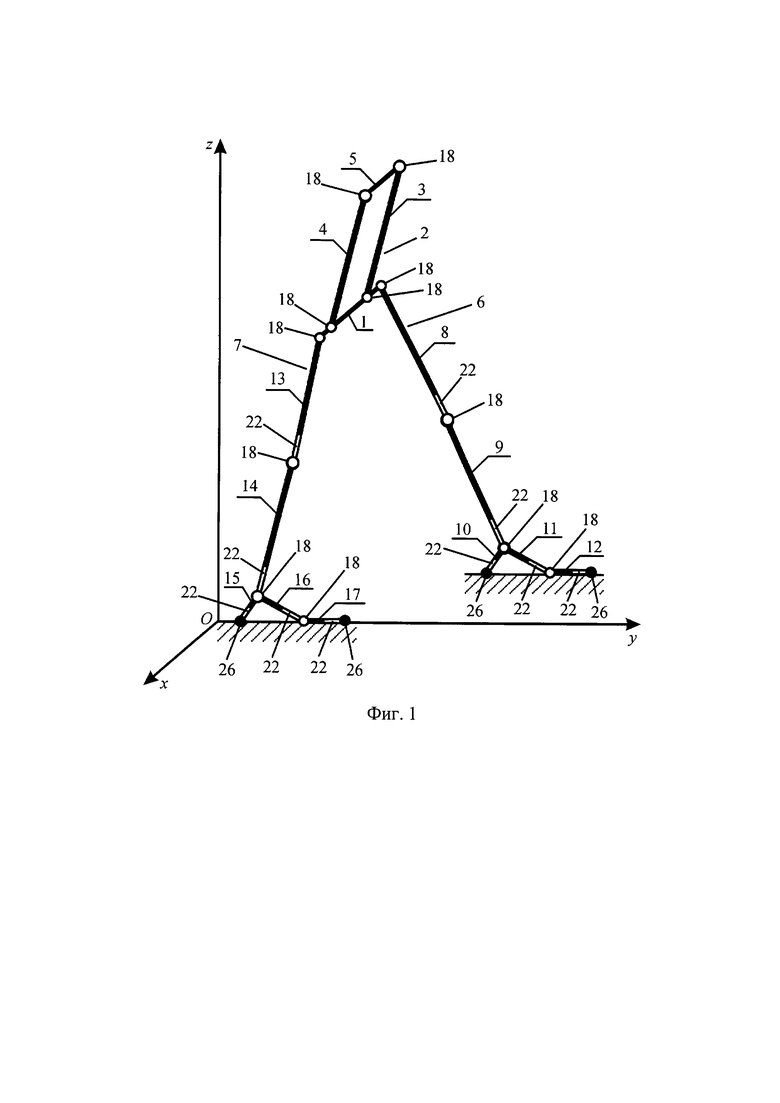
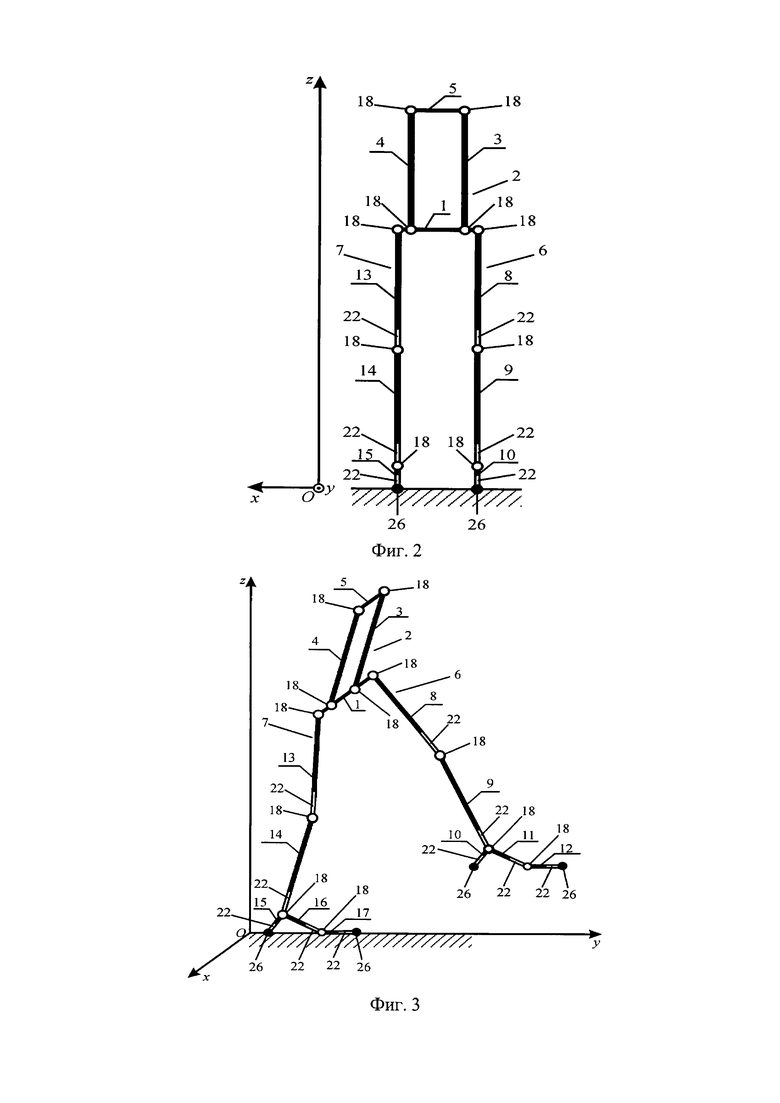
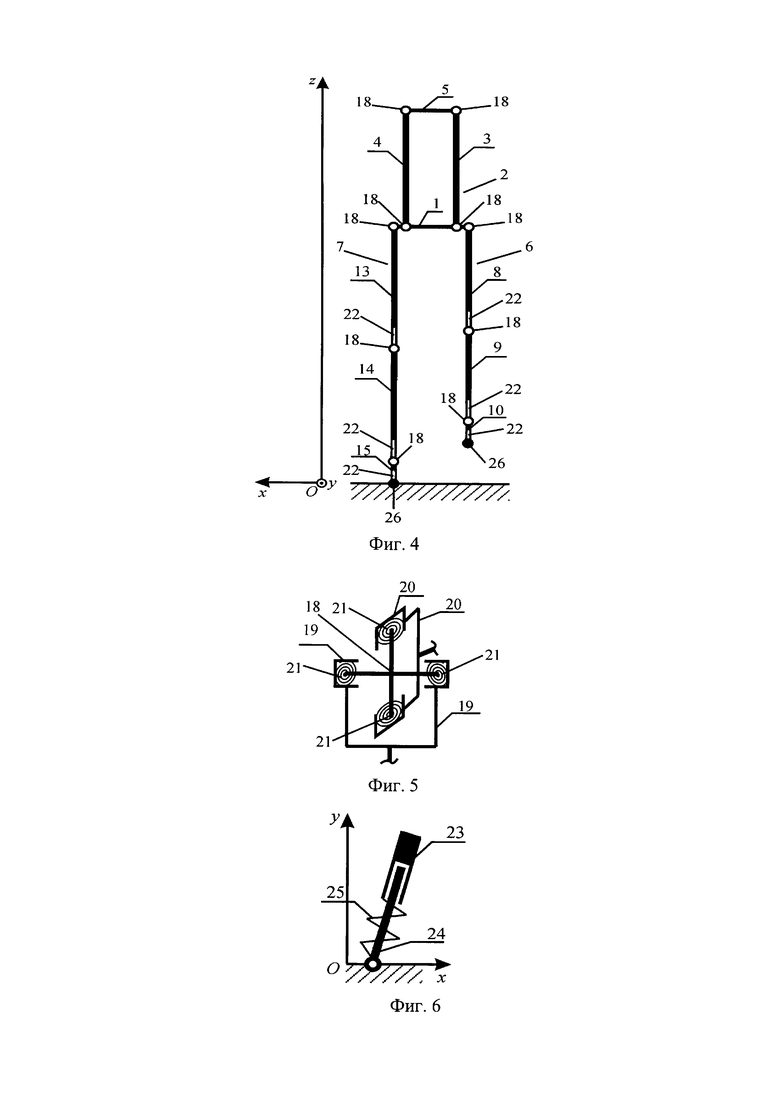
Сущность изобретения поясняется чертежами, где на фиг. 1 представлен вид сбоку экзоскелета в статике, на фиг. 2 изображен вид спереди (фас) экзоскелета в двухопорной фазе ходьбы в статике, на фиг. 3 показан вид сбоку экзоскелета в одноопорной фазе ходьбы в динамике, на фиг. 4 изображен вид спереди экзоскелета в динамике, на фиг. 5 представлено шарнирное соединение звеньев экзоскелета, на фиг. 6 представлен участок переменной длины звена экзоскелета.
Экзоскелет содержит раму 1, на которой сверху закреплен упругий корсет 2, выполненный в виде левой 3 и правой 4 дуг жесткости, соединенных опорным кольцом 5. Левая 3 и правая 4 дуги жесткости выполнены для поддержки или фиксации позвоночника, а опорное кольцо 5 выполнено с возможностью крепления верхних экзоконечностей.
Снизу к раме 1 присоединены идентичные левая 6 и правая 7 нижние экзоконечности. При этом левая нижняя экзоконечность 6 содержит присоединенное к раме 1 левое бедро 8, соединенную с ним снизу левую голень 9, к которой, в свою очередь, снизу сзади присоединена левая пяточная кость 10, а спереди соединенная с ней левая плюсна 11, к которой присоединены левые фаланги пальцев 12. Левые пяточная кость 10, плюсна 11 и фаланги пальцев 12 образуют левую стопу.
Правая нижняя экзоконечность 7 содержит присоединенное к раме 1 правое бедро 13, соединенную с ним снизу правую голень 14, к которой, в свою очередь, снизу сзади присоединена правая пяточная кость 15, а спереди соединенная с ней правая плюсна 16, к которой присоединены правые фаланги пальцев 17. Правые пяточная кость 15, плюсна 16 и фаланги пальцев 17 образуют правую стопу.
Соединение рамы 1,левой 3 и правой 4 дуг жесткости, опорного кольца 5, левого бедра 8, левой голени 9, левой пяточной кости 10, левой плюсны 11, левых фаланг пальцев 12, правого бедра 13, правой голени 14, правой пяточной кости 15, правой плюсны 16, правых фаланг пальцев 17 обеспечено шарнирным соединением 18, выполненным в виде расположенных между соединяемыми элементами первого 19 и второго 20 цилиндрических шарниров, установленных взаимно-перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета. На первом 19 и втором 20 цилиндрических шарнирах установлены попарно идентичные пружины кручения 21 для компенсации гравитационных нагрузок, своими концами закрепленные на концах соединяемых элементов.
Левое 8 и правое 13 бедра, левая 9 и правая 14 голени, левая 10 и правая 15 пяточные кости, левая 11 и правая 16 плюсны, левые 12 и правые 17 фаланги пальцев выполнены в виде звеньев, у которых со стороны расположенного ниже элемента выполнен участок переменной длины 22, который содержит корпус 23 с расположенным внутри него штоком 24, выполненным с возможностью возвратно-поступательного движения посредством закрепленной на корпусе 23 пружины сжатия-растяжения 25 для накопления и дальнейшего использования энергии опорно-двигательного аппарата человека. При этом со стороны участка переменной длины указанных элементов, их концом для соединения с соседним элементом является шток 24.
На левой 10 и правой 15 пяточных костях, а также на левых 12 и правых 17 фалангах пальцев расположены идентичные экзоподошвы 26.
Экзоподошва 26 выполнена в виде эластичной подошвы, обеспечивающей достаточное сцепление между экзоскелетом и опорной поверхностью, исключающее проскальзывание, а также жесткость и упругость, необходимые для комфортного передвижения по разным поверхностям. Экзоподошва выполнена из термоэластопластов, в зависимости от свойств поверхности перемещения экзоскелета - полиуретана, термополиуретана, термоэластопласта, поливинилхлорида, термопластичной резины. Крепление элементов экзоскелета к человеку выполнено в виде тканевых элементов с фиксаторами.
Экзоскелет ρ аботает следующим образом.
В начальный момент времени человек располагается внутри экзоскелета. Нагрузка от корпуса и рук человека распределяется на раму 1, упругий корсет 2 с левой 3 и правой 4 дугами жесткости и опорное кольцо 5.
Нагрузка от ног человека распределяется на левую 6 и правую 7 нижние экзоконечности. Поддержание позы человека и разгрузка мышц опорно-двигательного аппарата человека осуществляется за счет пружин кручения 21 для компенсации гравитационных нагрузок в первом 19 и втором 20 цилиндрических шарнирах соединения соседних подвижных звеньев экзоскелета. Пружины сжатия-растяжения 25 при этом нагружаются и частично сжимаются.
В динамике, для того, чтобы сделать первый шаг, как при обычной ходьбе без вспомогательных устройств, из статического положения неустойчивого равновесия человек выходит, немного наклоняясь вперед и отталкиваясь одной из ног от опоры. При отталкивании, потенциальная энергия сжатых пружин сжатия-растяжения 25, переходит в кинетическую энергию движения ноги, облегчая отталкивание нижней конечности. При этом пружины кручения 21 в первом 19 и втором 20 цилиндрических шарнирах деформируются вследствие изменения угла между звеньями, компенсируя гравитационную нагрузку и запасая потенциальную энергию. Далее, движение в одноопорной фазе (фиг. 3 и 4) является близким к баллистическому, и происходит практически без затрат энергии. Во время переноса ноги, потенциальная энергия деформированных пружин кручения 21, переходит в кинетическую энергию движения ноги, способствуя повороту звеньев ноги в физиологически правильное положение, принимаемое переносимой ногой перед постановкой на опору. В момент касания переносимой ногой опорной поверхности, участки переменной длины 22 сжимаются, кинетическая энергия удара запасается в пружинах сжатия-растяжения 25. Опорная нога, в пружинах сжатия-растяжения 25 которой запасена потенциальная энергия, производит усиленный толчок, равный сумме энергии мышц и потенциальной энергии пружин сжатия-растяжения 25, преобразуемой в кинетическую энергию движения ноги, длина участков переменной длины 22 увеличивается. Затем цикл повторяется. Вследствие изменения длин звеньев на участках переменной длины 22 повышается комфортабельность экзосклета при его эксплуатации человеком. В результате использования пружин сжатия-растяжения 25, которые представляют собой в данном случае рекуператоры энергии, и пружин кручения 21, играющих роль гравитационных компенсаторов, снимается часть нагрузки на мышцы опорно-двигательного аппарата человека, и, как следствие, снижаются энергозатраты в опорно-двигательном аппарате человека при движении в экзоскелете, тем самым увеличивается выносливость человека и время непрерывной работы.
Экспериментально установлено, что для взрослого человека массой тела от 50 кг до 100 кг параметры предложенного экзоскелета следующие: жесткость пружин кручения 21 - от 1000 Нм и до 4000 Нм, жесткость пружин сжатия-растяжения 25 - от 500 Н/м и до 2000 Н/м.
Для ребенка конструкция экзоскелета масштабируется по росту ребенка и дополняется декоративными элементами. Для ребенка с массой тела от 15 кг до 50 кг параметры предложенного экзоскелета следующие: жесткость пружин кручения 21 - от 100-150 Н м и до 1000 Н м, жесткость пружин сжатия-растяжения 25=от 50 Н/м и до 500 Н/м.
По сравнению с известными техническими решениями, у которых звенья абсолютно твердые, а стопы выполнены в виде жесткой площадки, предлагаемое изобретение обеспечивает синхронизацию работы экзоскелета с опорно-двигательным аппаратом человека, что позволяет разгрузить опорно-двигательный аппарат, повысить комфортабельность использования экзоскелета, а при нарушении опорно-двигательного аппарата осуществлять восстановление двигательных функций и проводить реабилитацию человека.
Еще одним преимуществом предлагаемого экзоскелета является относительная простота конструкции и прогнозируемая низкая цена за счет отсутствия активных приводов в виде двигателей, автономных источников энергии, требуемых вычислительных мощностей для управления движением.
Конструкция многозвенной стопы с экзоподошвой предлагаемого изобретения позволяет моделировать амортизационные свойства стопы, снижающие ударные нагрузки при постановке ноги на опорную поверхность. Таким образом, предлагаемое изобретение позволяет приблизить возможности пассивных экзоскелетов по разгрузке и усилению опорно-двигательного аппарата человека к активным экзоскелетам, сохраняя при этом простоту конструкции.
Использование изобретения позволяет повысить комфортабельность использования экзоскелета, увеличить выносливость человека и время непрерывной работы, а также упростить конструкцию экзоскелета.
| название | год | авторы | номер документа |
|---|---|---|---|
| Экзоскелет | 2023 |
|
RU2830368C1 |
| Экзоскелет | 2023 |
|
RU2823489C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| СПОСОБ ЛЕЧЕНИЯ ПЛОСКОСТОПИЯ | 2021 |
|
RU2814760C2 |
| Шина для лечения переломов костей нижних конечностей | 1979 |
|
SU856457A1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| ГРУЗОВОЙ ПАССИВНЫЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2018 |
|
RU2725288C2 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| УСТРОЙСТВО РЕАБИЛИТАЦИИ ПАЦИЕНТОВ С НАРУШЕНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2765403C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ И ЛЕЧЕНИЯ НАРУШЕНИЙ ФУНКЦИИ И ДЕФОРМАЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА | 2002 |
|
RU2222307C2 |
Изобретение относится к медицине, а именно к экзоскелетам. Экзоскелет содержит раму, на которой сверху закреплен упругий корсет, выполненный в виде левой и правой дуг жесткости для поддержки или фиксации позвоночника, соединенных опорным кольцом, выполненным с возможностью крепления верхних экзоконечностей. Снизу к раме присоединены левая и правая нижние экзоконечности, каждая из которых содержит присоединенное к раме бедро, соединенную с ним голень, к которой снизу присоединена стопа. Стопа выполнена в виде присоединенных к голени сзади пяточной кости, а спереди соединенной с ней плюсны, к которой присоединены фаланги пальцев. На пяточных костях и фалангах пальцев расположены экзоподошвы. Соединение рамы, левой и правой дуг жесткости, опорного кольца, бедер, голеней, пяточных костей, плюсен и фаланг пальцев обеспечено шарнирным соединением. Шарнирное соединение выполнено в виде расположенных между соединяемыми элементами первого и второго цилиндрических шарниров, установленных взаимно перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета. На первом и втором цилиндрических шарнирах установлены попарно пружины кручения, своими концами закрепленные на концах соединяемых элементов. Бедра, голени, пяточные кости, плюсны, фаланги пальцев выполнены в виде звеньев, у которых со стороны расположенного ниже элемента выполнен участок переменной длины, который содержит корпус с расположенным внутри него штоком, выполненным с возможностью возвратно-поступательного движения посредством закрепленной на корпусе пружины сжатия-растяжения. Со стороны участка переменной длины указанных элементов, их концом для соединения с соседним элементом является шток. Экзоподошва выполнена эластичной из термоэластопласта. Достигается повышение комфортности эксплуатации экзоскелета, упрощение его конструкции, увеличение силы, выносливости человека и времени непрерывной работы в экзоскелете. 6 ил.
Экзоскелет, содержащий раму, на которой сверху закреплен упругий корсет, выполненный в виде левой и правой дуг жесткости для поддержки или фиксации позвоночника, соединенных опорным кольцом, выполненным с возможностью крепления верхних экзоконечностей, снизу к раме присоединены идентичные левая и правая нижние экзоконечности, каждая из которых содержит присоединенное к раме бедро, соединенную с ним снизу голень, к которой, в свою очередь, снизу присоединена стопа, отличающийся тем, что стопа выполнена в виде присоединенных к голени сзади пяточной кости, а спереди соединенной с ней плюсны, к которой присоединены фаланги пальцев, причем на пяточных костях и фалангах пальцев расположены экзоподошвы, соединение рамы, левой и правой дуг жесткости, опорного кольца, бедер, голеней, пяточных костей, плюсен и фаланг пальцев обеспечено шарнирным соединением, выполненным в виде расположенных между соединяемыми элементами первого и второго цилиндрических шарниров, установленных взаимно перпендикулярно и закрепленных на концах соединяемых элементов экзоскелета, причем на первом и втором цилиндрических шарнирах установлены попарно идентичные пружины кручения, своими концами закрепленные на концах соединяемых элементов, бедра, голени, пяточные кости, плюсны, фаланги пальцев выполнены в виде звеньев, у которых со стороны расположенного ниже элемента выполнен участок переменной длины, который содержит корпус с расположенным внутри него штоком, выполненным с возможностью возвратно-поступательного движения посредством закрепленной на корпусе пружины сжатия-растяжения, при этом со стороны участка переменной длины указанных элементов, их концом для соединения с соседним элементом является шток, экзоподошва выполнена эластичной, например из термоэластопластов.
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛИСТОВ КАРТОНА ИЛИ ДРУГИХ МАТЕРИАЛОВ | 0 |
|
SU202527A1 |
| ЭКЗОСКЕЛЕТ | 2014 |
|
RU2567589C1 |
| KR 20190056592 A, 27.05.2019 | |||
| US 10576620 B1, 03.03.2020 | |||
| US 20120184881 A1, 19.07.2012 | |||
| ПРОСТАЯ КОНСТРУКЦИЯ КОМПЕНСАЦИИ ВЕСА ЧЕЛОВЕКА ПРИ ХОДЬБЕ И БЕГЕ | 2011 |
|
RU2489130C1 |

