Область техники, к которой относится изобретение
[0001] Настоящее раскрытие направлено в целом на способы и системы для определения местоположения и отслеживания перемещения индивидуального устройства ухода с использованием входных данных датчика.
Предшествующий уровень техники
[0002] Для облегчения надлежащего использования индивидуального устройства ухода современные устройства имеют встроенные датчики для отслеживания использования, отсчета времени и т.д. Например, разработаны электрические зубные щетки с предоставлением функции таймера, чтобы пользователь знал, что чистка выполнена в течение минимально рекомендованного времени. Функция таймера может включать в себя слышимый звук, осязательную обратную связь или другой механизм уведомления, чтобы дать пользователь знать об истечении заданного времени. Это предоставляет пользователю указание, что он чистил зубы в течение надлежащего времени. Разработаны электрические бритвы, имеющие датчики, которые могут определять еще непобритые области лица во время сеанса бритья для определения пропущенных областей. Аналогично, разработаны устройства для очистки кожи, имеющие датчики, которые могут определять, где они уже были использованы и какие области были пропущены.
[0003] Например, для гигиены полости рта, надлежащая чистка зубов, включающая в себя продолжительность чистки и охват чисткой, и регулярная очистка межзубных промежутков способствует обеспечению долгосрочного здоровья зубов. Многие зубные проблемы возникают или у людей, которые нерегулярно чистят зубы или межзубные промежутки, или у тех, кто делает это ненадлежащим образом, особенно в определенной области или участке полости рта. Среди тех, кто чистит зубы и межзубные промежутки регулярно, ненадлежащие привычки, связанные с очисткой, могут привести к недостаточному охвату, и, таким образом, к поверхностям, ненадлежаще очищенным во время сеанса очистки, даже когда проводится обычная чистка или очистка межзубных промежутков. Другой механизм для облегчения надлежащей техники чистки состоит в обеспечении надлежащей очистки всех зубных поверхностей, включая труднодоступные области полости рта или тех областей, которые имеют склонность быть ненадлежаще очищенными во время усредненного сеанса чистки. Один путь обеспечения надлежащего охвата состоит в определении или отслеживании положения зубной щетки в полости рта во время сеанса чистки и сравнение его с картой зубных поверхностей. Например, система, имеющая датчики, расположенные в фиксированном положении относительно зубов пользователя, могут отслеживать перемещение зубной щетки по зубам пользователя. Альтернативно, зубная щетка может включать в себя один или более внутренних датчиков, которые пытаются отследить перемещение устройства в полости рта. Однако, эта системы определения местоположения и системы отслеживания или очень дороги, или не могут надлежаще определять или отслеживать положение индивидуального устройства ухода.
[0004] Соответственно, сохраняется необходимость в индивидуальных устройствах ухода, надлежаще определяющих местоположение устройства в области использования для обеспечения надлежащего и полного использования.
Сущность изобретения
[0005] Настоящее раскрытие направлено на изобретательские способы и системы для определения местоположения индивидуального устройства ухода в области использования, таким образом обеспечивая возможностью оценки использования устройства. Например, применительно к системе, выполненной с возможностью определения местоположения индивидуального устройства ухода в полости рта, изобретательские способы и системы обеспечивают возможность большей точности определения местоположения и отслеживания, и, таким образом, обеспечивают возможность оценки техники чистки зубов пользователем. Система использует один или более датчиков в индивидуальном устройстве ухода для определения относительного положения, продолжительности нахождения и направления поступательного перемещения головки устройства относительно поверхности, подлежащей чистке. Согласно варианту осуществления использования устройства для гигиены полости рта, данные датчика, например, обеспечивают информацию о том, расположено ли устройство в центре относительно зубной или межзубной области, как долго устройство остается в некотором месте и/или в каком направлении перемещается устройство в полости рта, например, назад или вперед.
[0006] В целом в одном аспекте обеспечивается способ характеризации индивидуального устройства ухода в области использования. Способ включает в себя этапы, на которых: (i) обеспечивают индивидуальное устройство ухода, содержащее головку устройства, имеющую множество пучков, при этом первый пучок из множества пучков связан с первым тактильным датчиком и образует первый угол с головкой устройства, причем первый угол, образованный с головкой устройства, больше или меньше 90 градусов; (ii) формируют, в ответ на взаимодействие множества пучков с поверхностью, подлежащей очистке, данные первого датчика посредством первого тактильного датчика; и (iii) характеризуют, посредством контроллера, использующего данные первого датчика, положение индивидуального устройства ухода в области использования.
[0007] Согласно варианту осуществления индивидуальное устройство ухода дополнительно включает в себя второй пучок из множества пучков, связанный со вторым тактильным датчиком и образующий второй угол с головкой устройства, при этом первый и второй углы различны, и дополнительно при этом контроллер также использует данные второго датчика на этапе характеризации.
[0008] Согласно варианту осуществления способ дополнительно включает в себя этап, на котором определяют, используя данные первого датчика и/или данные второго датчика, продолжительность нахождения на поверхности, подлежащей очистке головкой устройства.
[0009] Согласно варианту осуществления способ дополнительно включает в себя этап, на котором оценивают, на основе характеризации, сеанс очистки.
[0010] Согласно варианту осуществления способ дополнительно включает в себя этап, на котором сообщают характеризацию.
[0011] Согласно варианту осуществления этап характеризации содержит подэтап, на котором сравнивают данные первого датчика с данными второго датчика.
[0012] Согласно варианту осуществления индивидуальное устройство ухода содержит более двух тактильных датчиков.
[0013] Согласно аспекту обеспечивается способ характеризации индивидуального устройства ухода. Способ включает в себя этапы, на которых: (i) обеспечивают индивидуальное устройство ухода, содержащее головку устройства, имеющую множество пучков, при этом первый пучок из множества пучков связан с первым тактильным датчиком и образует первый угол с головкой устройства, и дополнительно при этом второй пучок из множества пучков связан со вторым тактильным датчиком и образует второй угол с головкой устройства, причем первый и второй углы различны; (ii) формируют, в ответ на перемещение множества пучков относительно поверхности, подлежащей очистке, данные первого датчика посредством первого тактильного датчика и данные второго датчика посредством второго тактильного датчика; и (iii) характеризуют, посредством контроллера с использованием данных первого датчика и данных второго датчика, перемещение индивидуального устройства ухода относительно поверхности, подлежащей очистке.
[0014] Согласно аспекту обеспечивается индивидуальное устройство ухода. Индивидуальное устройство ухода включает в себя: головку устройства, содержащую множество пучков, при этом первый пучок из множества пучков связан с первым тактильным датчиком и образует первый угол с головкой устройства, и дополнительно при этом второй пучок из множества пучков связан со вторым тактильным датчиком и образует второй угол с головкой устройства, причем первый и второй углы различны; и контроллер, выполненный с возможностью: (i) принимать, в ответ на взаимодействие множества пучков с поверхностью, подлежащей очистке, данные первого датчика от первого тактильного датчика и данные второго датчика от второго тактильного датчика; и (ii) характеризовать с использованием данных первого датчика и данных второго датчика, положение индивидуального устройства ухода в области, подлежащей очистке.
[0015] Согласно аспекту обеспечивается индивидуальное устройство ухода. Индивидуальное устройство ухода включает в себя: головку устройства, содержащую множество пучков, при этом указанное множество пучков образует первый угол с головкой устройства, причем первый и второй углы различны; корпусный участок, содержащий тактильный датчик, выполненный с возможностью обнаружения движения головки устройства относительно корпусного участка, при этом первый угол выполнен с возможностью вызывать ступенчатое перемещение головки устройства, когда множество расположенных под углом пучков взаимодействуют с поверхностью, подлежащей очистке; и контроллер, выполненный с возможностью: (i) получать, в ответ на взаимодействие множества пучков с поверхностью, данные датчика от тактильного датчика; и (ii) характеризовать, используя указанные данные датчика, положение индивидуального устройства ухода в области, подлежащей очистке.
[0016] Следует принять во внимание, что сочетания вышеприведенных концепций, рассмотренных более подробно ниже (при условии, что такие концепции не являются взаимоисключающими) рассматриваются как часть предмета изобретения, раскрытого в настоящем документе. В частности, все сочетания заявленного предмета изобретения, имеющиеся в конце настоящего раскрытия, рассматриваются как часть предмета изобретения, раскрытого в настоящем документе.
[0017] Эти и другие аспекты изобретения станут очевидны из вариантов осуществления и объяснены со ссылкой на вариант(ы) осуществления, рассмотренные здесь и далее.
Краткое описание чертежей
[0018] На чертежах подобные номера ссылочных позиций в целом относятся к одним и тем же частям на различных видах. Кроме того, чертежи не обязательно выполнены в масштабе, вместо этого упор сделан в целом на иллюстрирование принципов изобретения.
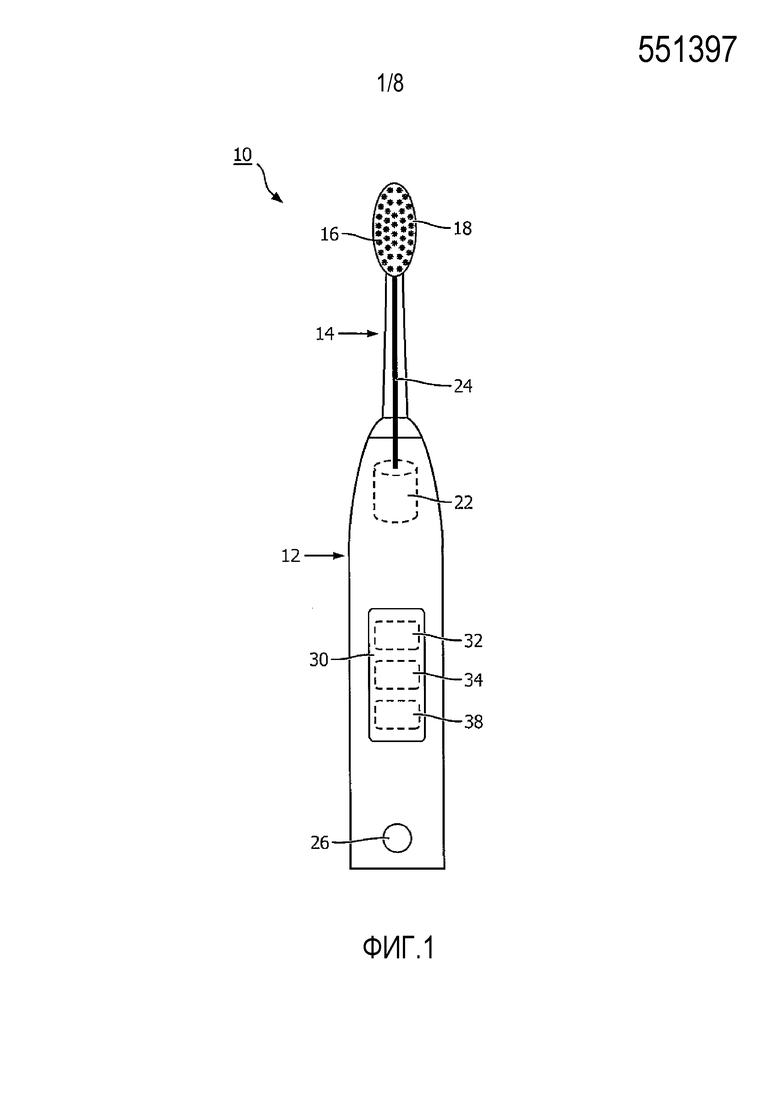
[0019] Фиг. 1 - схематическое изображение индивидуального устройства ухода согласно варианту осуществления.
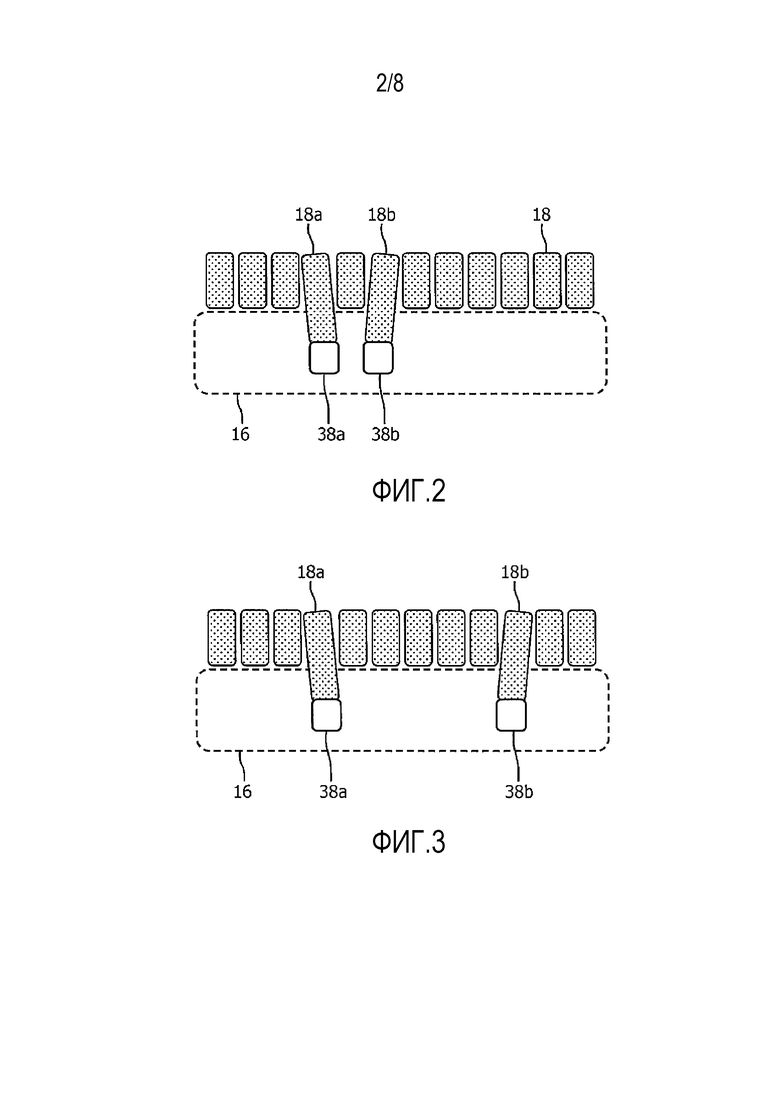
[0020] Фиг. 2 - схематическое изображение головки устройства индивидуального устройства ухода согласно варианту осуществления.
[0021] Фиг. 3 - схематическое изображение головки устройства индивидуального устройства ухода согласно варианту осуществления.
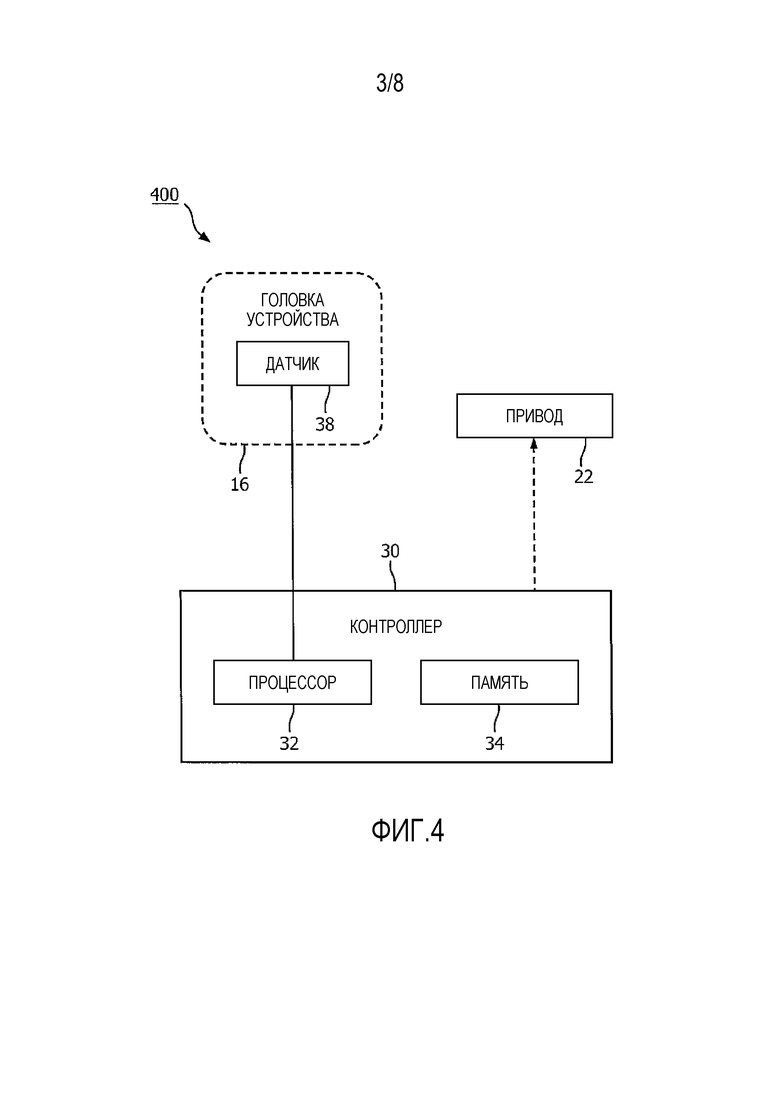
[0022] Фиг. 4 - схема индивидуальной системы ухода согласно варианту осуществления.
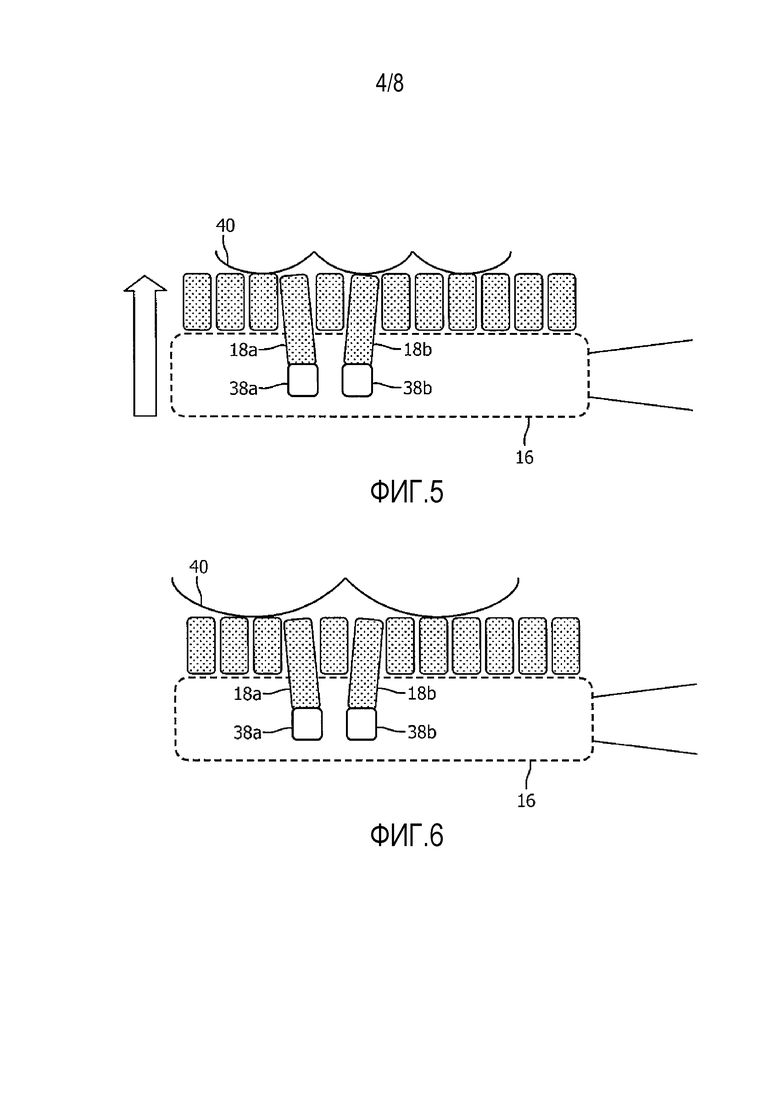
[0023] Фиг. 5 - схематическое изображение головки устройства индивидуального устройства ухода согласно варианту осуществления.
[0024] Фиг. 6 - схематическое изображение головки индивидуального устройства ухода согласно варианту осуществления.
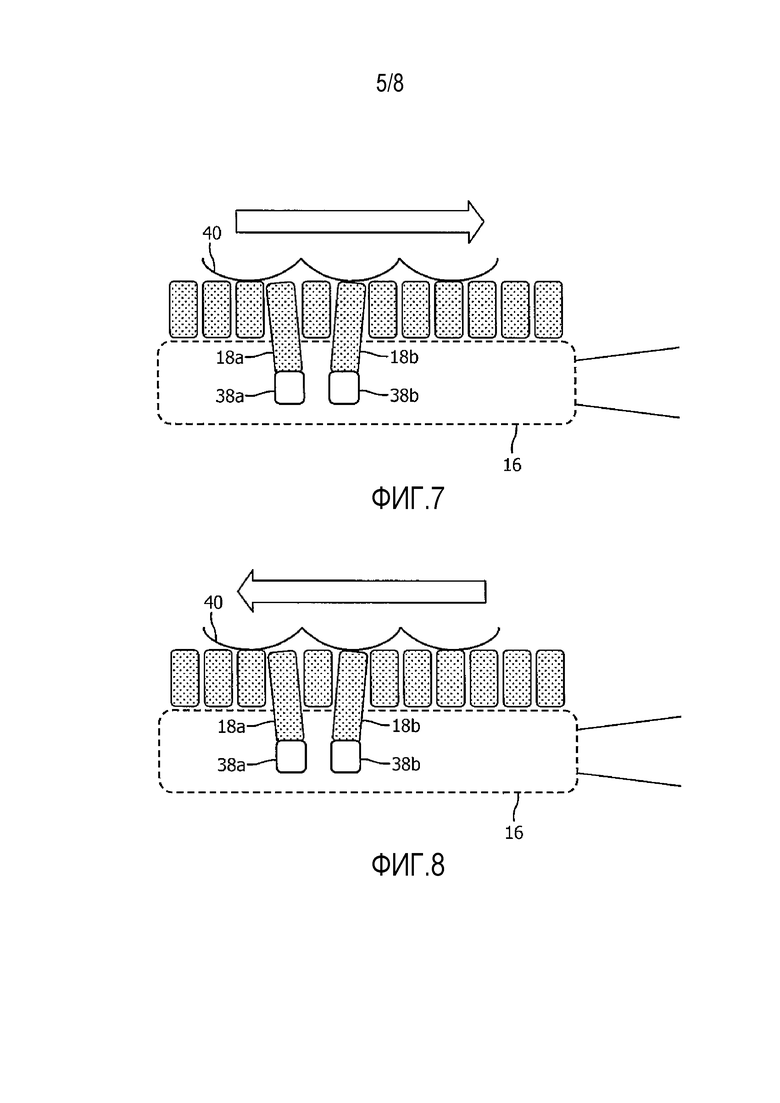
[0025] Фиг. 7 - схематическое изображение головки индивидуального устройства ухода согласно варианту осуществления.
[0026] Фиг. 8 - схематическое изображение головки индивидуального устройства ухода согласно варианту осуществления.
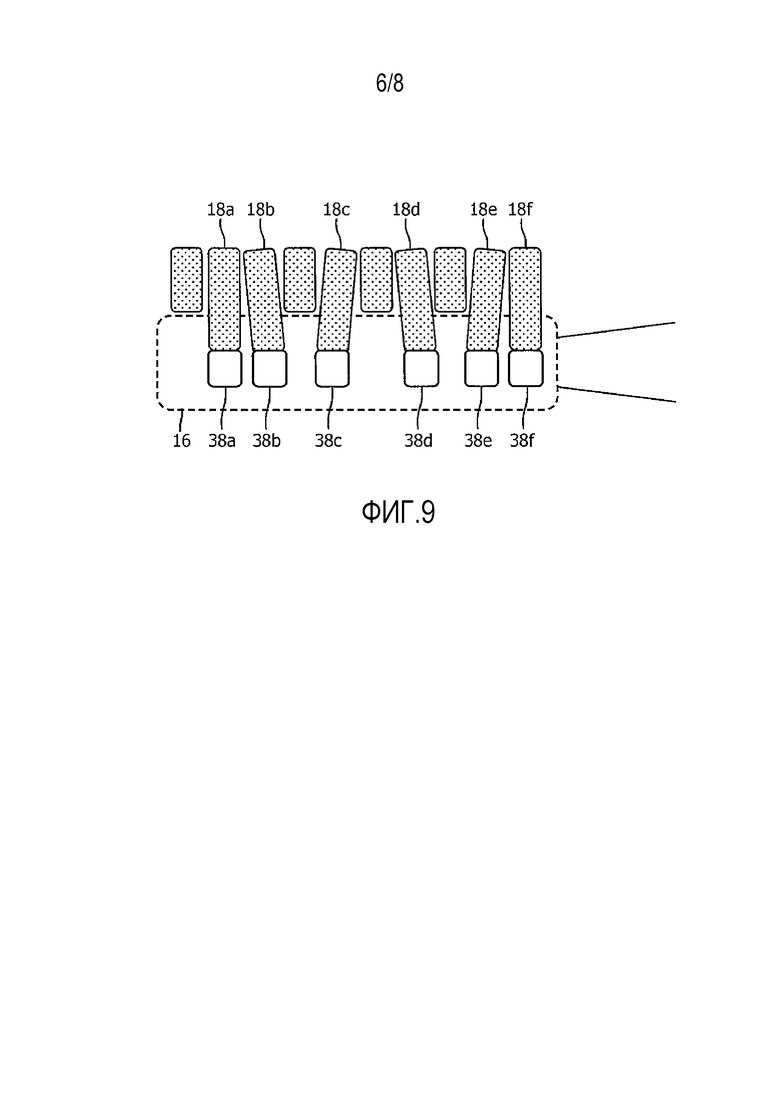
[0027] Фиг. 9 - схематическое изображение головки индивидуального устройства ухода согласно варианту осуществления.
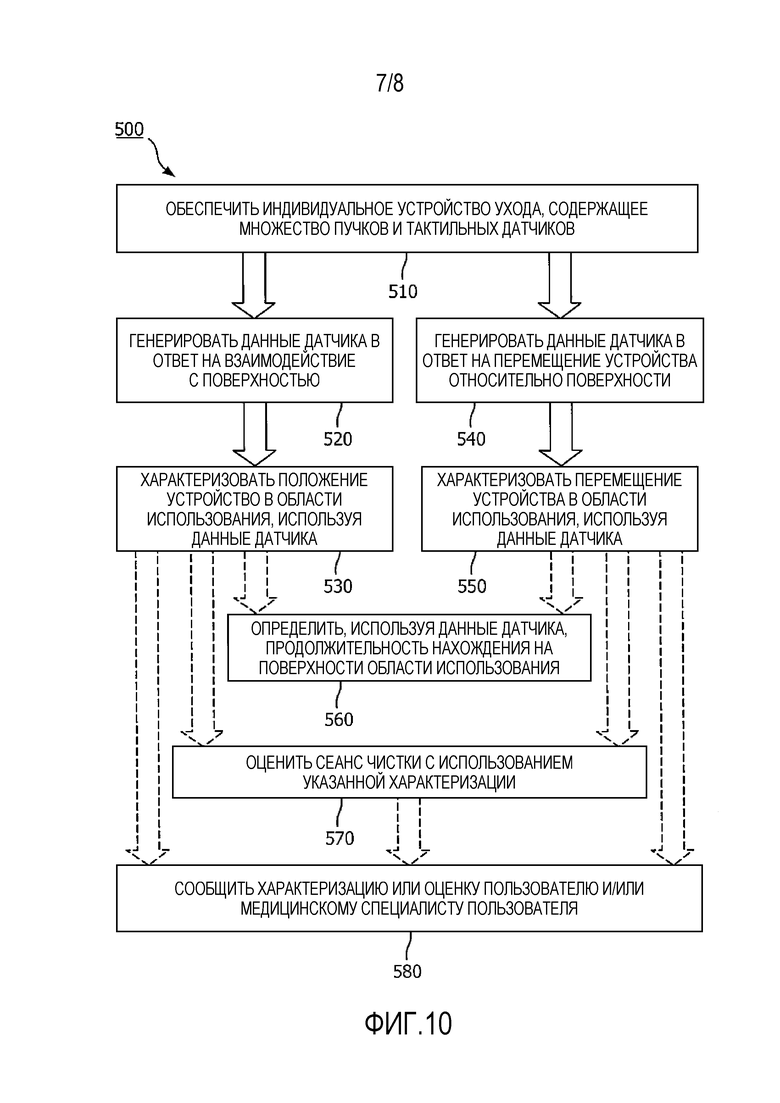
[0028] Фиг. 10 - блок-схема, изображающая способ характеризации индивидуального устройства с использованием входных данных датчика согласно варианту осуществления.
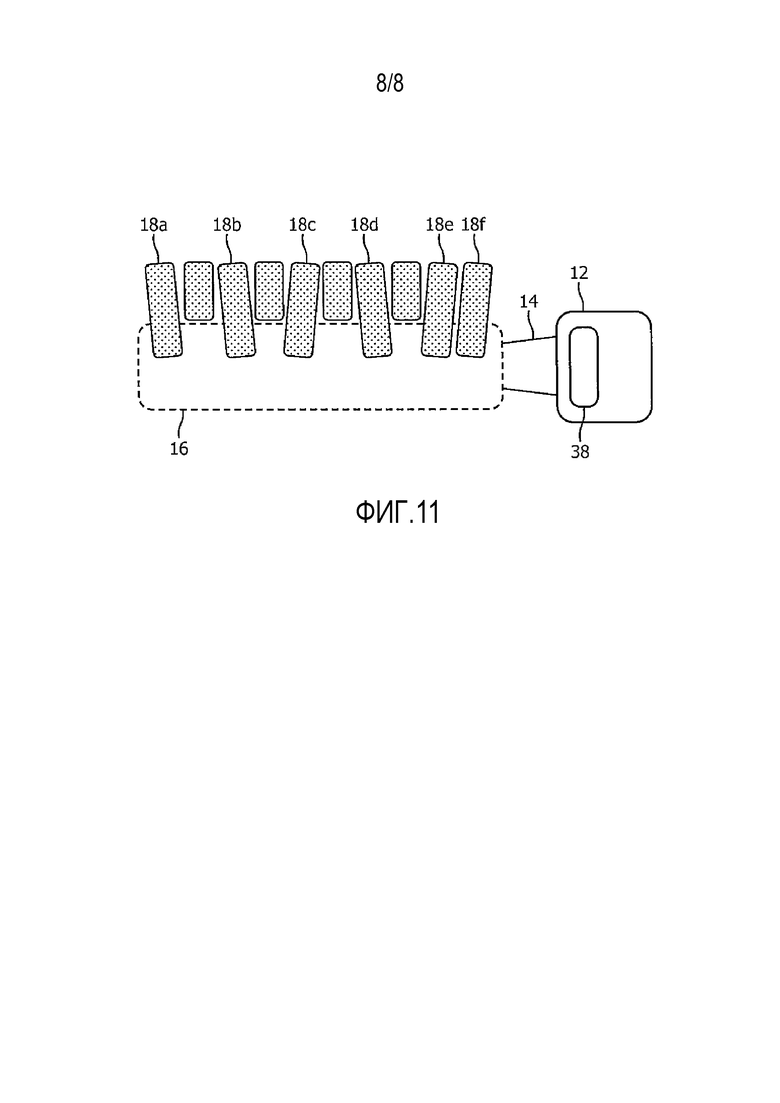
[0029] Фиг. 11 - схематическое изображение индивидуального устройства ухода согласно варианту осуществления.
Подробное описание вариантов осуществления
[0030] Настоящее раскрытие описывает различные варианты осуществления способа, системы и индивидуального устройства ухода для получения характеристик местоположения индивидуального устройства ухода в полости рта пользователя. В более общем смысле заявитель обнаружил и принял во внимание, что было бы выгодно обеспечить систему для определения местоположения индивидуального устройств ухода в области, подлежащей очистке или иной обработке, для предоставления обратной связи пользователю. Соответственно, способы и системы, описанные или иным образом предусмотренные в настоящем документе, обеспечивают индивидуальное устройство ухода, выполненное с возможностью определения местоположения индивидуального устройства ухода относительно некоторой области, времени нахождения устройства в некотором месте и/или направления, в котором устройство перемещается в указанной области. Согласно варианту осуществления индивидуальное устройство ухода использует один или более датчиков и пучков для определения относительного положения, продолжительности нахождения и направления поступательного перемещения головки устройства в связи с очисткой.
[0031] Конкретная цель использования вариантов осуществления и воплощений в настоящем документе состоит в предоставлении информации о чистке с использованием индивидуального устройства ухода, например, такого как электрическая зубная щетка Philips Sonicare™ (изготовленная компанией Koninklijke Philips Electronics, Нидерланды), хотя блок может использоваться со множеством других индивидуальных устройств ухода, например, другими устройствами для гигиены полости рта, очистителями лица, бритвами и другими устройствами.
[0032] На фиг. 1, в одном варианте осуществления обеспечивается индивидуальное устройство 10 ухода, включающее в себя корпусный участок 12 и головной элемент 14. Головной элемент 14 включает в себя головку 16 устройства на удаленном от корпусного участка конце. Корпусный участок 12 обычно содержит футляр, по меньшей мере участок которого является полым, для вмещения компонентов индивидуального устройства ухода. Головной элемент 14 установлен так, чтобы была обеспечена возможность перемещения относительно корпусного участка 12. Перемещение может представлять собой любое из множества различных перемещений, включающих в себя, помимо прочего, вибрации или поворот.
[0033] Корпусный участок 12 обычно содержит блок привода, имеющий двигатель 22, для создания перемещения, и передающий компонент или приводной вал 24, для передачи генерированных перемещений головному элементу 14. Например, привод содержит двигатель или электромагнит(ы) 22, генерирующие перемещение приводного вала 24, которое затем передается головному элементу 14. Привод может включать в себя компоненты, например, помимо прочих, источник питания, генератор колебаний и один или более электромагнитов. В этом варианте осуществления источник питания содержит один или более аккумуляторов (не представлено), которые могут, например, электрически заряжаться в зарядном удерживающем приспособлении, в которое помещается индивидуальное устройство 10 ухода, когда оно не используется. Согласно одному варианту осуществления головной элемент 14 установлен на приводной вал 24 так, что обеспечивается возможность вибрации относительно корпусного участка 12. Головной элемент 14 может быть неподвижно установлен на приводной вал 24, или он может альтернативно быть установлен с возможностью снятия, так что головной элемент 14 может заменяться на другой головной элемент для выполнение других видов работ, или когда компонент головного элемента изнашивается и требует замены.
[0034] Корпусный участок 12 дополнительно снабжен пользовательским вводом 26 для включения и отключения привода. Пользовательский ввод 26 позволяет пользователю оперировать индивидуальным устройством 10 ухода, например, для включения и отключения устройства. Пользовательский ввод 26 может, например, представлять собой кнопку, сенсорный экран или переключатель.
[0035] Корпусный участок устройства также содержит контроллер 30. Контроллер 30 может быть образован из одного или множества модулей, и может быть выполнен с возможностью управления индивидуальным устройством 10 ухода в ответ на ввод, например, полученный посредством пользовательского ввода 26. Контроллер 30 может содержать, например, процессор 32 и память 34, и может, необязательно, включать в себя модуль связи. Процессор 32 может принимать любой подходящий вид, включающий в себя, без ограничения, микроконтроллер, множество микроконтроллеров, электрическую схему, одиночный процессор или множество процессоров. Память 34 может принимать любой подходящий вид, включая в себя энергонезависимую память и/или RAM. Энергонезависимая память может включать в себя постоянную память (ROM), накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Память может хранить, помимо прочего, операционную систему. RAM используется процессором для временного хранения данных. Согласно варианту осуществления операционная система может содержать код, который, при исполнении контроллером 30, управляет работой аппаратных компонентов индивидуального устройства 10 ухода. Согласно варианту осуществления модуль 36 связи передает собранные данные датчика и может представлять собой любой модуль, устройство или средство, способное передавать проводной или беспроводной сигнал, включающий в себя, без ограничения, Wi-Fi, Bluetooth, связь в ближней зоне и/или сотовый модуль.
[0036] Хотя вариант осуществления индивидуального устройства 10 ухода, представленный на фиг. 1, представляет собой электрическую зубную щетку, следует понимать, что возможно множество альтернативных вариантов осуществления индивидуального устройства ухода, например, устройства для очистки межзубных промежутков, бритвы, устройства для очистки кожи (не представлены).
[0037] На фиг. 2, в одном варианте осуществления обеспечивается головка 16 устройства индивидуального устройства 10 ухода. Головка 16 устройства включает в себя множество пучков 18, отходящих наружу для взаимодействия с поверхностями, подлежащими очистке. Головка 16 устройства также включает в себя два или более тактильных датчиков 38, которые могут представлять собой любой тактильный датчик. Тактильный датчик предпочтительно по меньшей мере частично встроен в головку 16 устройства. Тактильный датчик может представлять собой кольцо вокруг пучка, может быть соединен с проксимальным концом пучка и/или может быть соединен с пучком посредством одного или более промежуточных элементов. Термин ʺпучокʺ 18 при использовании в настоящем документе может относиться к множеству компонентов, включающих в себя группы очищающих щетинок, механизм для подачи выброса воды или воздуха, или подстригающий или другой режущий механизм или компоненты, расположенные на головке 16 устройства. Согласно одному варианту осуществления тактильный датчик может обеспечиваться посредством механического соединения основной пластины, в которой расположены пучки, в контакте с элементом тактильного датчика. Элемент датчика преобразует приложенную силу или давление в электрический сигнал, который может обеспечиваться с помощью известных тактильных датчиков на основе пьезорезистивности, пьезоэлектричества, емкостного сопротивления или упругого сопротивления.
[0038] Согласно варианту осуществления, когда головка 16 устройства представляет собой головку зубной щетки, она включает в себя пучки 18 по меньшей мере трех различных конфигураций. Первая конфигурация, представленная большей частью пучков 18, расположена по существу перпендикулярно боковой оси индивидуального устройства 10 ухода. Вторая конфигурация включает в себя один или более пучков 18a, наклоненных в первом направлении относительно боковой оси индивидуального устройства ухода. Третья конфигурация включает в себя один или более пучков 18b, наклоненных во втором направлении относительно боковой оси индивидуального устройства ухода, при этом указанное первое направление и указанное второе направление противоположны друг другу. Указанный один или более пучков 18a соединены или иным образом связаны с первым тактильным датчиком 38a. Указанный один или более пучков 18b соединены или иным образом связаны со вторым тактильным датчиком 38b. Расположенные под углом пучки 18a и 18b могут находиться вблизи друг друга, как представлено на фиг. 2, или они могут находиться на расстоянии друг от друга, как представлено на фиг. 3. Хотя на чертежах представлены только два наклоненных пучка и два тактильных датчика, следует принять во внимание, что головка устройства может содержать множество наклоненных пучков и тактильных датчиков. Например, хотя на чертежах нечувствительные пучки представлены как ненаклоненные, головка устройства может содержать и наклоненные чувствительные пучки, и наклоненные нечувствительные пучки. Соответственно, головка устройства может содержать и чувствительные пучки, и нечувствительные пучки, расположенные под одним и тем же углом или под двумя и более различными углами.
[0039] Когда индивидуальное устройство ухода перемещается вдоль поверхностей, подлежащих очистке, наклоненные щетиночные пучки 18a и 18b взаимодействуют с указанными поверхностями, таким образом извлекая данные датчика от тактильных датчиков. Взаимодействие с одной и той же поверхностью будет различным из-за различных углов наклона различных пучков. Из-за различных углов пучков, например, данные датчика от тактильного датчика будут более заметными. Кроме того, наклоненная конфигурация улучшает обнаружение движения вперед и назад из-за различий сигналов между расположенными под углом пучками, как более подробно рассмотрено в настоящем документе.
[0040] В предпочтительном варианте осуществления головки 16 устройства не все пучки 18 являются наклоненными, но большинство пучков образует угол, по существу перпендикулярный боковой оси индивидуального устройства ухода, что и наблюдается в большинстве традиционных головок устройств. Слишком большое количество наклоненных пучков приведет к большим колебанием усилия, что может ощутить пользователь, например, ощущение ступенчатости, когда пучки перемещаются от одного участка к следующему.
[0041] В дополнение к относительному наклону пучков, важными параметрами для надлежащего функционирования индивидуального устройства ухода являются длина пучков и жесткость материала пучков. Например, длина пучков будет влиять на силу сигнала, подаваемого тактильными датчиками, соединенными с этими пучками. Кроме того, длина чувствительных пучков относительно нечувствительных пучков имеет существенное влияние на силу сигнала. Например, более длинные пучки могут быть связаны с большей силой сигнала, поскольку они находятся в положении, позволяющем воспринимать большие силы от поверхностей. Аналогично, жесткость пучков влияет на силу сигнала, подаваемого тактильными датчиками, соединенными с этими пучками. Дополнительно, жесткость чувствительных пучков относительно нечувствительных пучков имеет значительное влияние на силу сигнала. Регулирование жесткости пучков, соединенных с тактильными датчиками, аналогично регулированию силы сигнала. Соответственно, длина и/или жесткость чувствительных пучков являются параметрами, которые могут определяться во время разработки и/или изготовления индивидуального устройства ухода или головки устройства.
[0042] На фиг. 4 представлен вариант осуществления очищающей системы 400. Согласно варианту осуществления очищающая систем 400 включает в себя один или более тактильных датчиков 38 в головке 16 устройства и контроллер 30, содержащий процессор 32 и память 34. Очищающая система 400 включает в себя привод 22, работа которого управляется контроллером 30. Один или более тактильных датчиков 38 в головке 16 устройства проводным или беспроводным способом связаны с контроллером 30, и данные датчика, генерируемые двумя или более датчиками 38, предоставляются контроллеру 30 для осуществления различного анализа, рассмотренного в настоящем документе.
[0043] На фиг. 5, в одном варианте осуществления представлена головка 16 устройства индивидуального устройства 10 ухода, взаимодействующая с поверхностью, например, одним или более зубами 40, как представлено на чертеже. Когда пользователь прижимает головку устройства к поверхности в направлении, указанном стрелкой, пучки 18 испытывают действие силы сопротивления. Пучки 18a и/или 18b, если они подвергаются действию силы сопротивления, передают эту силу сопротивления тактильным датчикам 38a и/или 38b. В этом примере данные датчиков указывают, что пучки 18a и 18b индивидуального устройства ухода в настоящее время зацепляют зубную поверхность 40.
[0044] Данные датчиков, генерируемые тактильными датчиками в ответ на действие силы сопротивления, передаются на контроллер, и индивидуальное устройство ухода распознает, что приложена сила. Сила может измеряться качественно, например, определение включения/выключения приложения силы. Альтернативно, сила может измеряться количественно, включая в себя приблизительное определение величины приложенной силы. Дополнительно, тактильные датчики могут быть выполнены с возможностью обнаружения направленной силы. Например, вместо реагирования исключительно на непосредственно приложение силы в направлении, в основном перпендикулярном поверхности, тактильные датчики 38 могут быть выполнены с возможностью генерировать данные датчиков в ответ на перемещение пучков под множеством углов, включающих в себя, без ограничения, боковое перемещение пучков.
[0045] На фиг. 6, в одном варианте осуществления представлена головка 16 устройства индивидуального устройства 10 ухода, взаимодействующая с поверхностью, например, одним или более зубами 40. Когда пользователь прижимает головку устройства к поверхности в направлении, указанном стрелкой, пучки 18 испытывают действие силы сопротивления. Однако по сравнению с фиг. 5 пучки 18a и/или 18b в этом варианте осуществления располагаются в межзубном промежутке и в данный момент не испытывают действия силы сопротивления. Тактильные датчики не генерируют данные датчиков, указывающие приложенную силу, что означает, что пучки 38a и 38b индивидуального устройства ухода в представленный на чертеже момент не зацепляют поверхность 40.
[0046] На фиг. 7 и 8 представлена головка 16 устройства индивидуального устройства 10 ухода, в котором пользователь перемещает головку устройства относительно поверхности 40. В каждом из этих вариантов осуществления, пользователь перемещает головку устройства в направлении соответствующих стрелок. Например, на фиг. 7 пользователь тянет индивидуальное устройство ухода и, таким образом, головка устройства перемещается назад в направлении пользователя. На фиг. 8 пользователь толкает или ведет индивидуальное устройство ухода и, таким образом, головка устройства перемещается вперед в направлении от пользователя.
[0047] Каждый из пучков 18a и 18b испытывает действие силы как результат перемещения, и, таким образом, каждый из тактильных датчиков 38a и 38b создает данные датчика. Однако, поскольку тактильные датчики 38a и 38b содержат различные углы, их ответ на перемещение головки 16 устройства будет различным. Например, на фиг. 7 пучок 18a тащат вдоль поверхности 40 под своим естественным углом, и, таким образом, он не испытывает действия значительное силы, хотя он, возможно, испытывает воздействие некоторой силы и, таким образом, передает эту силу тактильному датчику 38a, который генерирует и передает данные датчика. В отличие от этого, пучок 18b испытывает действие значительной силы сопротивления, когда взаимодействует с поверхностью 40. Соответственно, он передает эту силу тактильному датчику 38b, который генерирует и передает данные датчика. Данных датчика, созданных тактильным датчиком 38b или 38a, может быть достаточно самих по себе для указания направления силы, хотя при использовании данных датчика от обоих тактильных датчиков, анализ, проводимый контроллером 30, является более надежным.
[0048] На фиг. 8, пучок 18b тащат вдоль поверхности 40 под своим естественным углом, и, таким образом, он не испытывает действия значительной силы, хотя он, возможно, испытывает воздействием некоторой силы и, таким образом, передает эту силу тактильному датчику 38b, который генерирует и передает данные датчика. В отличие от этого, пучок 18a испытывает действие значительной силы сопротивления, когда взаимодействует с поверхностью 40. Соответственно, он передает эту силу тактильному датчику 38a, который генерирует и передает данные датчика.
[0049] На фиг. 9 в одном варианте осуществления представлена головка 16 индивидуального устройства 10 ухода, имеющая более двух расположенных под наклоном пучков. Вместо этого имеются пучки 18a-18f, расположенные с различными наклонами. Головка устройства, в этом варианте осуществления, также содержит множество тактильных датчиков 18a-18f. Одна и та же головка устройства может содержать пучки 18, расположенные под двумя или более различными углами. Возможны многие другие сочетания и конфигурации пучков и тактильных датчиков. Согласно варианту осуществления дополнительные тактильные датчики 38 могут приводить к большей чувствительности и увеличенной точности определения местоположения и обнаружения перемещения.
[0050] Согласно другому варианту осуществления, в котором восприятие выполняется полностью в ручке индивидуального устройства посредством измерения контактного усилия всей головки устройства с поверхностью, может иметься наклоненная щетина на довольно большой области чистящей головки для создания различимого сигнала, когда пользователь перескакивает с одной поверхности на другую, например, с одного зуба на другой, как представлено в данном случае. Ступенчатость может использоваться в качестве средства, создающего у пользователя ощущение очистки каждой отдельной поверхности, при этом также способствуя определению местоположения.
[0051] На фиг. 10 в одном варианте осуществления представлена блок-схема способа 500 характеризации индивидуального устройства ухода с использованием входных данных датчика. На этапе 510 способа обеспечивается индивидуальное устройство 10 ухода. Индивидуальное устройство ухода может представлять собой любой из вариантов осуществления, описанных или иным образом предусмотренных в настоящем документе. Например, согласно одному варианту осуществления индивидуальное устройство 10 ухода включает в себя корпусный участок 12, головной элемент 14, имеющий множество пучков 18, два или более тактильных датчиков 38 и контроллер 30 с процессором 32 и памятью 34. Также возможно множество других вариантов осуществления индивидуального устройства 10 ухода.
[0052] На этапе 520 способа индивидуальное устройств 10 ухода располагается в области, подлежащей очистке, на первой поверхности 40a, и пучки взаимодействуют с указанной поверхностью. Эта сила передается тактильным датчикам, и генерируются данные датчика, которые измеряют силу качественно и/или количественно. Первый тактильный датчик 38a, связанный с первым пучком 18a, генерирует данные первого датчика, а второй тактильный датчик 38b, связанный со вторым пучком 18b, генерирует данные второго датчика. Поскольку указанные первый и второй пучки расположены под различными углами, данные первого и второго датчика будут различными. Созданные данные датчика передаются контроллеру 22, где они могут анализироваться, как описано выше. Хотя этот вариант осуществления описан в отношении двух тактильных датчиков, установлено, что индивидуальное устройство 10 ухода может содержать множество различных тактильных датчиков.
[0053] На этапе 530 способа контроллер использует полученные данные датчика для характеризации положения индивидуального устройства ухода в области использования. Например, в зависимости от положения головки устройства и/или направления движения сигнал одного пучка будет выше, чем сигнал другого пучка, расположенного под другим углом. Состояние относительного местоположения пучков - например: (i) на центре зуба; или (ii) между зубами- может быть охарактеризовано на основании данных о фазе первого и второго датчика. Согласно варианту осуществления анализ данных датчика содержит сравнение данных первого датчика с данными второго датчика. Согласно другому варианту осуществления анализ содержит сочетание сигналов, поступающих от двух или более датчиков. Например, один способ анализа содержит пороговую обработку каждого сигнала, после которой может использоваться логическая схема для выходного сигнала состояния 1 или состояния 2. Состояние 1 может указывать определенное действие, например, запуск выброса жидкости через носик, встроенный в головку устройства, а состояние 2 может указывать, что жидкость не следует запускать. Возможно множество других конфигураций.
[0054] Дополнительно, характерные точки, например, первый контакт пучков с передним краем области использования, где сигналы являются максимальными, и снижение сигнала ниже определенного уровня, являются указателями этих состояний местоположения или переходов к этим состояниям местоположения. Вместе с определением времени сигнала может быть оценена продолжительность нахождения пучков на конкретной поверхности области использования. Как описано или иным образом предусмотрено в настоящем документе, указанная характеристика может использоваться для последующей или вторичной функции, включающей в себя, без ограничения, подсчет изменений состояния и/или запуск выброса жидкости для очистки.
[0055] Согласно варианту осуществления для дополнительного улучшения точности определения местоположения может использоваться датчик, например, акселерометр. Соответственно, индивидуальное устройство 10 ухода может содержать дополнительный датчик, например, акселерометр. Дополнительный датчик может представлять собой любой датчик движения или определения местоположения. Индивидуальное устройство 10 ухода может использовать входной сигнал от указанного дополнительного датчика, вместе с данными первого и второго датчика, для более точного определения положения, местоположения и/или перемещения индивидуального устройства 10 ухода.
[0056] На необязательном этапе 560 способа данные первого и/или второго датчика используются для определения продолжительности нахождения головки устройства на поверхности 40 области использования, включая в себя, без ограничения, определение продолжительности нахождения в определенной области использования или приложение определенной силы. Например, контроллер устройства может содержать таймер, который хронометрирует различные сигналы, полученные от тактильных датчиков.
[0057] На этапе 540 способа индивидуальное устройство 10 ухода располагается в области использования на первой поверхности 40a и затем перемещается ко второй поверхности 40b. При этом создается сила на пучках, которая передается связанным тактильным датчикам, и генерируются данные датчика, которые измеряют силу качественно и/или количественно. Первый тактильный датчик 38a, связанный с первым пучком 18a, генерирует данные первого датчика, а второй тактильный датчик 38b, связанный со вторым пучком 18b, генерирует данные второго датчика. Поскольку первый и второй пучки расположены под различными углами, данные первого и второго датчика будут различными. Созданные данные датчика передаются контроллеру 22, где они могут быть проанализированы, как описано в настоящем документе.
[0058] На этапе 550 способа контроллер использует полученные данные датчика для характеристики перемещения индивидуального устройства ухода в области использования, используя любой из анализов, описанных или иным образом предусмотренных в настоящем документе. Например, в зависимости от положения головки устройства и/или направления движения, сигнал одного пучка будет сильнее сигнала другого пучка, расположенного под другим углом. Перемещения, которые могут быть охарактеризованы устройством, представляют собой ключевые слова, например "неподвижный", "перемещение назад от области использования", "перемещение вперед" и многие другие.
[0059] На необязательном этапе 570 способа устройство может использовать информацию, характеризующую положение и/или перемещение, полученную во время сеанса пользования, для оценки этого сеанса использования. Согласно варианту осуществления система сохраняет информацию во время сеанса использования для создания или выполнения иным образом оценки, немедленно или в будущем. Согласно другому варианту осуществления система хранит информацию о множестве сеансов использования для накопления во времени данных, включающих в себя улучшение времени чистки, техники или других показателей, а также отсутствие улучшения.
[0060] На необязательном этапе 580 способа может сообщаться оценка сеанса использования. Например, система может сообщать пользователю информацию о том, какие участки были очищены надлежащим образом, а какие участки не были очищены надлежащим образом. Это может выполняться посредством использования дисплея в качестве визуального индикатора того, какие участки были почищены надлежащим образом, какие участки, которые были почищены ненадлежащим образом, и/или и тех, и других. Согласно варианту осуществления система может предоставлять в реальном времени информацию об определении местоположения и/или перемещении пользователю или удаленной системе посредством проводного или беспроводного сетевого соединения. В качестве другого примера система может передавать сохраненные данные о местоположении и/или перемещении на компьютер посредством проводного или беспроводного сетевого соединения. Таким образом, система может передавать информацию об отдельном сеансе использования и/или множестве сеансов использования непосредственно специалисту в области здравоохранения, например, стоматологу, стоматологическому гигиенисту, дерматологу или подобному специалисту.
[0061] Согласно варианту осуществления способ может использоваться вместе с другими системами восприятия местоположения или слежения для улучшения пространственного разрешения и информации, получаемой о сеансе использования. Согласно варианту осуществления способ может использоваться для улучшения функциональных возможностей очищающего устройства, использующего жидкость. Например, очищающая струя и/или аэрозоль, встроенные в индивидуальное устройство ухода, может приводиться в действие или применяться, только когда согласно способу определяется, что устройство находится в надлежащем положении. Например, если аэрозоль или струя предназначена только для заданных определенных областей, способ может использоваться для запуска выброса жидкости. Обычно показания такого датчика представляют собой функцию времени, а не местоположения. Однако при использовании данных датчика, полученных согласно способам и устройствам, описанным в настоящем документе, функциональные возможности этих датчиков резко возрастают.
[0062] На фиг. 11 в одном варианте осуществления представлено индивидуальное устройство 10 ухода, имеющее головку 16 устройства, корпусный участок 12 и головной элемент 14. Головка содержит пучки 18a-18f, расположенные под одинаковым углом к головке устройства, или как изображено на фиг. 11, пучки расположены под двумя или более различными углами друг к другу. Корпусный участок 12 индивидуального устройства ухода содержит тактильный датчик 38, обнаруживающий контактное усилие головки устройства с поверхностью использования. В результате взаимодействия расположенных под углом пучков со структурами в области использования, появляется различимый сигнал, когда пользователь перескакивает с одной поверхности на другую. Эта ступенчатость может использоваться в качестве средства, создающего пользователю ощущение очистки каждой отдельной области, при этом также способствует определению местоположения.
[0063] Все определения, приведенные и используемые в настоящем документе, следует понимать как имеющие приоритет над словарными определениями, определениями в документах, включенных посредством ссылки, и/или обычными значениями определяемых терминов.
[0064] Слово в единственном числе, при использовании в настоящем документе в описании и в формуле, следует понимать в значении «по меньшей мере один», если явно не указано иное.
[0065] Фразу ʺи/илиʺ при использовании в настоящем документе, в описании и в формуле, следует понимать в значении ʺлюбой из двух или обаʺ элементов, соединенных таким образом, то есть элементов, которые совместно присутствуют в некоторых случаях и раздельно присутствуют в других случаях. Множество элементов, перечисленных с помощью слов ʺи/илиʺ, следует истолковывать таким же образом, то есть ʺодин или болееʺ элементов, соединенных таким образом. Могут необязательно иметься другие элементы, отличные от элементов, явно указанных фразой ʺи/илиʺ, связанные или не связанные с явно указанными элементами.
[0066] При использовании в настоящем документе, в описании и в формуле ʺилиʺ следует понимать в том же значении, что и ʺи/илиʺ, как определено выше. Например, при разделении элементов в списке, ʺилиʺ или ʺи/илиʺ следует истолковывать как включающие, то есть как включение по меньшей мере одного, но также включение более чем одного, из множества или списка элементов, и, необязательно, дополнительных неперечисленных предметов. Только термины, явно указывающие на противоположное, например, ʺтолько один изʺ или ʺстрого один изʺ или, при использовании в формуле, ʺсостоящий изʺ относятся к включению строго одного элемента из множества или списка элементов. В целом термин ʺилиʺ при использовании в настоящем документе следует истолковывать в исключающем смысле (то есть ʺодин или другой, но не обаʺ) только в том случае, когда ему предшествуют термины исключения, например, ʺкаждыйʺ, ʺодин изʺ, ʺтолько один изʺ или ʺстрого один изʺ.
[0067] При использовании в настоящем документе, в описании и в формуле, фразу ʺпо меньшей мере одинʺ в отношении списка из одного или более элементов следует понимать в значении по меньшей мере один элемент, выбранный из любого одного или более элементов в списке элементов, но необязательно включающих в себя по меньшей мере один из каждого и всякого элемента, явно перечисленного в списке элементов, и не исключающих любых сочетаний элементов в списке элементов. Это определение также допускает, что могут дополнительно иметься элементы, отличные от элементов, явно указанных в списке элементов, к которым относится фраза ʺпо меньшей мере одинʺ, независимо от того, имеют отношение эти элементы к явно указанным элементами или нет.
[0068] Следует также понимать, что, если явно не указано иное, в любых способах, заявленных в настоящем документе, которые включают в себя более одного этапа или действия, порядок этапов или действий способа не обязательно ограничивается порядком, в котором указанные этапы или действия способа изложены.
[0069] В формуле, а также в вышеприведенном описании, все переходные фразы, такие как ʺсодержащийʺ, ʺвключающий в себяʺ, ʺнесущийʺ, ʺимеющийʺ, ʺсодержащийʺ, ʺвмещающий в себяʺ, ʺзаключающий в себяʺ, ʺсоставленный изʺ и подобные должны пониматься как открытые, то есть, означать включение в себя, но не ограничение. Только переходные фразы ʺсостоящий изʺ и ʺсостоящий исключительно изʺ являются соответственно закрытыми или полузакрытыми.
Хотя в настоящем документе описаны и проиллюстрированы некоторые варианты осуществления изобретения, специалистам в данной области техники легко представить себе множество других средств и/или конструкций для выполнения функции и/или получения результатов и/или одного или более преимуществ, описанных в настоящем документе, и каждое из таких изменений и/или модификаций считается находящимся в пределах объема вариантов осуществления изобретения, описанных в настоящем документе. В более широком виде, специалисты в данной области техники легко поймут, что все параметры, размеры, материалы и/или конфигурации приведены только в качестве примера и что фактические параметры, размеры, материалы и/или конфигурации зависят от конкретного применения или применений, для которых используются идеи изобретения. Специалисты в данной области техники поймут или смогут установить тривиальным опытным путем многие эквиваленты частных вариантов осуществления, описанных в настоящем документе. Поэтому должно быть понятно, что вышеприведенные варианты осуществления представлены исключительно для примера и что в пределах объема приложенной формулы и ее эквивалентов варианты осуществления изобретения могут применяться иным образом, чем явно описано и заявлено. Варианты осуществления настоящего раскрытия направлены на каждый отдельный признак, систему, изделие, материалы, комплект и/или способ, описанный в настоящем документе. Кроме того, любое сочетание двух или более таких признаков, систем, изделий, материалов, комплектов и/или способов, если только такие признаки, системы, изделия, материалы, комплекты и/или способы, не являются взаимно несовместимыми, включено в объем настоящего раскрытия.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОНАХОЖДЕНИЯ УСТРОЙСТВА ДЛЯ ОЧИСТКИ ПОЛОСТИ РТА | 2017 |
|
RU2763901C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ДОСТИЖЕНИЯ ОПТИМАЛЬНОЙ ГИГИЕНЫ ПОЛОСТИ РТА ПОСРЕДСТВОМ ОБРАТНОЙ СВЯЗИ | 2017 |
|
RU2731865C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ СООТВЕТСТВИЯ СЕАНСУ УПРАВЛЯЕМОЙ ЧИСТКИ | 2017 |
|
RU2753556C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ГОЛОВЫ ПОЛЬЗОВАТЕЛЯ ВО ВРЕМЯ ЧИСТКИ ЗУБОВ | 2017 |
|
RU2759877C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ УСТРОЙСТВА ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА | 2016 |
|
RU2728406C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ РАННЕГО КАРИЕСА | 2018 |
|
RU2779049C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УЛУЧШЕННОГО ИЗМЕРЕНИЯ ЛОКАЛИЗОВАННОГО ВОСПАЛЕНИЯ ПОЛОСТИ РТА С ИСПОЛЬЗОВАНИЕМ ЦЕНТРОИДНОЙ ВЫБОРКИ | 2018 |
|
RU2786135C2 |
| ИЗМЕРЕНИЕ ПОКАЗАТЕЛЯ ЗДОРОВЬЯ С ИСПОЛЬЗОВАНИЕМ ВРЕМЕНИ ВОССТАНОВЛЕНИЯ ТКАНИ | 2018 |
|
RU2691929C1 |
| УСТРОЙСТВО ДЛЯ УХОДА ЗА ПОЛОСТЬЮ РТА С РЕГУЛИРУЕМЫМ ЦЕНТРОМ МАСС | 2008 |
|
RU2431452C1 |
| НАБОР ДЛЯ ЭКСТРЕННЫХ СИТУАЦИЙ | 2019 |
|
RU2795794C2 |
Предложен способ (500) определения местоположения индивидуального устройства (10) ухода. Способ включает в себя этапы, на которых: (i) обеспечивают (510) индивидуальное устройство ухода, содержащее множеств пучков (18), при этом первый пучок (18a) из указанного множества пучков включает первый тактильный датчик (38a) и образует первый угол с головкой устройства и дополнительно второй пучок (18b) из указанного множества пучков включает второй тактильный датчик (38b) и образует второй угол с головкой устройства; (ii) генерируют (520), в ответ на взаимодействие указанного множества пучков с поверхностью (40) использования, данные первого датчика посредством первого тактильного датчика и данные второго датчика посредством второго тактильного датчика; и (iii) характеризуют (530), посредством контроллера с использованием данных первого датчика и данных второго датчика, положение индивидуального устройства ухода в области использования. 4 н. и 11 з.п. ф-лы, 11 ил.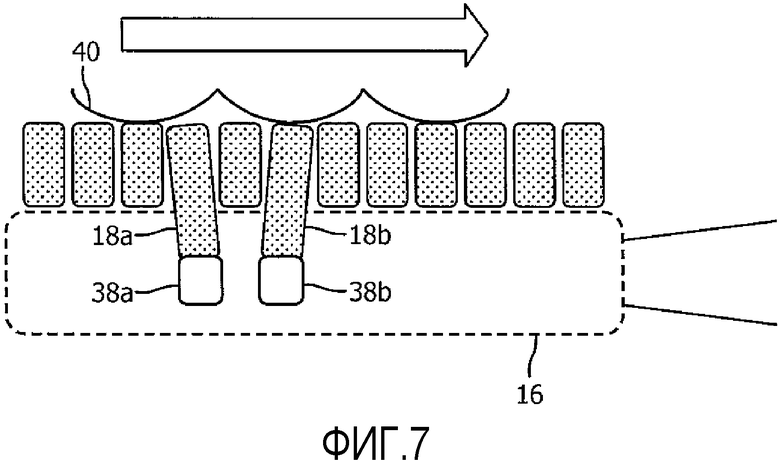
1. Индивидуальное устройство (10) ухода, содержащее:
головку (16) устройства, содержащую множество пучков (18), при этом первый пучок (18a) из множества пучков связан с первым тактильным датчиком (38a) и содержит первый угол относительно головки устройства и дополнительно второй пучок (18b) из множества пучков связан со вторым тактильным датчиком (38b) и содержит второй угол относительно головки устройства, причем указанные первый и второй углы различны; и
контроллер, выполненный с возможностью: (i) принимать, в ответ на взаимодействие множества пучков с поверхностью (40) использования, данные первого датчика от первого тактильного датчика и данные второго датчика от второго тактильного датчика; и (ii) характеризовать, используя указанные данные первого датчика и указанные данные второго датчика, положение индивидуального устройства ухода в области использования.
2. Индивидуальное устройство ухода по п. 1, в котором контроллер выполнен с возможностью характеризовать, используя данные первого датчика и данные второго датчика, перемещение индивидуального устройства ухода в области использования.
3. Индивидуальное устройство ухода по п. 1, в котором контроллер выполнен с возможностью определять, используя данные первого датчика и/или данные второго датчика, продолжительность нахождения головки устройства на поверхности.
4. Индивидуальное устройство ухода по п. 1, в котором контроллер выполнен с возможностью сообщать указанную характеризацию.
5. Индивидуальное устройство ухода по п. 1, в котором индивидуальное устройство ухода содержит более двух тактильных датчиков.
6. Индивидуальное устройство (10) ухода, содержащее:
головку (16) устройства, содержащую множество пучков (18), при этом указанное множество пучков содержит первый угол относительно головки устройства, причем первый и второй углы различны;
корпусный участок (12), содержащий тактильный датчик (38), выполненный с возможностью обнаружения движения головки устройства относительно корпусного участка, при этом первый угол выполнен с возможностью вызывать ступенчатое перемещение головки устройства, когда множество расположенных под углом пучков взаимодействуют с поверхностью; и
контроллер, выполненный с возможностью: (i) получать, в ответ на взаимодействие множества пучков с поверхностью (40), данные датчика от тактильного датчика; и (ii) характеризовать, используя указанные данные датчика, положение индивидуального устройства ухода в области использования.
7. Способ (500) характеризации индивидуального устройства (10) ухода, содержащий этапы, на которых:
обеспечивают (510) индивидуальное устройство ухода, содержащее головку (16) устройства, имеющую множество пучков (18), при этом первый пучок (18a) из указанного множества пучков связан с первым тактильным датчиком (38a) и содержит первый угол относительно головки устройства, причем первый угол относительно головки устройства больше или меньше 90 градусов;
генерируют (520), в ответ на взаимодействие множества пучков с поверхностью (40), данные первого датчика посредством первого тактильного датчика; и
характеризуют (530), посредством контроллера с использованием данных первого датчика, положение индивидуального устройства ухода в области использования.
8. Способ по п. 7, дополнительно содержащий второй пучок (18b) из множества пучков, связанный со вторым тактильным датчиком (38b) и образующий второй угол с головкой устройства, при этом первый и второй углы различны, и дополнительно контроллер также использует данные второго датчика на этапе характеризации.
9. Способ по п. 7, дополнительно содержащий этап, на котором определяют (560), используя данные первого датчика и/или данные второго датчика, продолжительность нахождения головки устройства на поверхности использования.
10. Способ по п. 7, дополнительно содержащий этап, на котором оценивают (570) сеанс использования на основе указанной характеризации.
11. Способ по п. 7, дополнительно содержащий этап, на котором сообщают (580) указанную характеризацию.
12. Способ по п. 7, в котором этап характеристизации содержит сравнение данных первого датчика с данными второго датчика.
13. Способ (500) характеризации индивидуального устройства (10) ухода, содержащий этапы, на которых:
обеспечивают (510) индивидуальное устройство ухода, содержащее корпусный участок (12), головку (16) устройства, имеющую множество пучков (18), при этом первый пучок (18a) из множества пучков связан с первым тактильным датчиком (38a) и содержит первый угол относительно головки устройства и дополнительно второй пучок (18b) из множества пучков связан со вторым тактильным датчиком (38b) и содержит второй угол относительно головки устройства, причем первый и второй углы различны;
генерируют (540), в ответ на перемещение множества пучков относительно поверхности (40) использования, данные первого датчика посредством первого тактильного датчика и данные второго датчика посредством второго тактильного датчика; и
характеризуют (550), посредством контроллера с использованием данных первого датчика и данных второго датчика, перемещение индивидуального устройства ухода относительно поверхности использования.
14. Способ по п. 13, дополнительно содержащий этап, на котором определяют (560), с использованием данных первого датчика и/или данных второго датчика, продолжительность нахождения головки устройства на поверхности использования.
15. Способ по п. 13, дополнительно содержащий этап, на котором оценивают (570) сеанс использования на основе указанной характеризации.
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| US 6536068 B1, 25.03.2003 | |||
| СПОСОБ ПОДГОТОВКИ ТЯЖЕЛОГО УГЛЕВОДОРОДНОГО СЫРЬЯ К ТЕРМИЧЕСКОЙ КОНВЕРСИИ | 2013 |
|
RU2522303C1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

