ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к системам и способам определения ориентации головы пользователя во время использования устройства для ухода за полостью рта.
УРОВЕНЬ ТЕХНИКИ
[0002] Отслеживание местоположения устройства для ухода за полостью рта в полости рта обеспечивает эффективную обратную связь с пользователем в отношении действий пользователя по гигиене полости рта. Например, если отслеживается местоположение головки для чистки полости рта во рту пользователя, могут быть идентифицированы участки группы зубов, определенного зуба или части десны, которые еще не были очищены, вследствие чего пользователь может сосредоточиться на данных областях. Кроме того, на основе отслеживания местоположения устройства для ухода за полостью рта в полости рта во время использования может быть обеспечена надлежащая обратная связь в отношении действий пользователя, например, слишком тщательной, слишком слабой или недостаточно продолжительной чистки в конкретной секции рта.
[0003] Известны различные традиционные формы отслеживания местоположения устройства для ухода за полостью рта во рту пользователя. Например, для измерения движения устройства для ухода за полостью рта относительно силы тяжести или направления силы используют инерциальные датчики движения, такие как акселерометры, гироскопы и магнитные датчики, но они не способны определять относительную ориентацию устройства для ухода за полостью рта относительно головы пользователя. Для определения местоположения устройства во рту пользователя измеряют либо относительное положение устройства относительно головы пользователя, либо информацию об ориентации головы пользователя и ориентации устройства измеряют отдельно и в дальнейшем комбинируют.
[0004] Следовательно, данные традиционные формы отслеживания не обеспечивают возможности отслеживать местоположение и перемещение пользователя или устройства относительно головы пользователя. Данные ограничения традиционной технологии могут привести к неточному отслеживанию и плохой обратной связи.
[0005] Соответственно, в указанной области техники существует потребность в системах и способах улучшенного отслеживания устройства для ухода за полостью рта во время использования, включая определение ориентации головы пользователя с использованием данных датчика.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0006] Настоящее изобретение направлено на системы и способы, в соответствии с настоящим изобретением, определения ориентации головы пользователя во время использования устройства для ухода за полостью рта. Различные варианты реализации и осуществления, представленные в данном документе, направлены на устройство для ухода за полостью рта, содержащее датчик движения, который может быть выполнен с возможностью установления местоположения головы пользователя во время использования устройства для ухода за полостью рта. Датчик может быть соединен проводным или беспроводным способом с контроллером, содержащим процессор и некратковременный носитель информации для хранения программного кода, который может быть запрограммирован на обнаружение того, когда устройство расположено в пределах обозначенной области калибровки в полости рта, оценку ориентации головы пользователя на основе движения устройства в пределах обозначенной области калибровки и определение ориентации устройства относительно рта пользователя. Системы и способы, в соответствии с настоящим изобретением, обеспечивают возможность отслеживания устройства с использованием одного или более датчиков без обязательной ориентации головки в начале сеанса чистки и/или без непосредственного измерения ориентации головки в начале сеанса чистки.
[0007] В целом, в одном аспекте представлен способ определения ориентации головы пользователя с помощью устройства для ухода за полостью рта. Способ включает этапы: (i) обеспечения устройства для ухода за полостью рта, содержащего головку, датчик и контроллер, (ii) определения того, когда головка расположена в пределах области калибровки в полости рта пользователя, и (iii) оценки ориентации головы пользователя посредством контроллера на основе ориентации головки в пределах области калибровки.
[0008] В соответствии с вариантом реализации, способ дополнительно включает этап приема данных от датчика относительно движения устройства для ухода за полостью рта в области за пределами области калибровки.
[0009] В соответствии с вариантом реализации, способ дополнительно включает этап определения, на основе оцененной ориентации головы пользователя и данных о движении, сгенерированных датчиком, ориентации головки относительно полости рта пользователя для области за пределами области калибровки.
[0010] В соответствии с вариантом реализации, способ дополнительно включает этап выдачи обратной связи пользователю относительно определенной ориентации головки относительно полости рта пользователя. В соответствии с вариантом реализации, обратную связь выдают в режиме реального времени.
[0011] В соответствии с вариантом реализации, этап определения того, когда головка расположена в пределах области калибровки в полости рта пользователя, содержит данные от второго датчика.
[0012] В соответствии с вариантом реализации, способ дополнительно включает этап генерирования обратной связи для сеанса чистки на основе множества оценок ориентации головки относительно полости рта пользователя.
[0013] В соответствии с вариантом реализации, способ дополнительно включает этап передачи сгенерированной обратной связи.
[0014] В соответствии с вариантом реализации датчик является инерциальным датчиком движения.
[0015] В соответствии с одним аспектом, представлено устройство для ухода за полостью рта, выполненное с возможностью определения ориентации головы пользователя. Устройство содержит: головку, один или более датчиков и контроллер, выполненный с возможностью: (i) определения того, когда головка находится в пределах области калибровки полости рта пользователя, и (ii) оценки ориентации головы пользователя на основе ориентации головки устройства в пределах области калибровки.
[0016] В соответствии с одним аспектом, представлен способ выдачи обратной связи для сеанса чистки. Способ включает этапы: (i) обеспечения устройства для ухода за полостью рта, содержащего головку, датчик и контроллер, (ii) определения того, когда головка устройства находится в пределах области калибровки в полости рта пользователя, (iii) оценки ориентации головы пользователя посредством контроллера на основе ориентации головки устройства в пределах области калибровки, (iv) приема данных от датчика относительно движения устройства для ухода за полостью рта в области за пределами области калибровки, (v) определения на основе оцененной ориентации головы пользователя и данных о движении, сгенерированных датчиком, ориентации головки устройства относительно полости рта пользователя для области за пределами области калибровки, и (vi) генерирования обратной связи относительно определенной ориентации головки устройства относительно полости рта пользователя.
[0017] Термин «контроллер», используемый в настоящем документе для целей настоящего раскрытия, в целом используется для описания различных устройств, относящихся к работе устройства датчика потока, системы или способа. Контроллер может быть реализован многочисленными способами (например, в виде аппаратного обеспечения специального назначения) для выполнения различных функций, описанных в настоящем документе. «Процессор» является одним примером контроллера, который использует один или более микропроцессоров, которые могут быть запрограммированы с использованием программного обеспечения (например, микрокода) на выполнение различных функций, описанных в настоящем документе. Контроллер может быть реализован с использованием процессора и без него, а также он может быть реализован в виде комбинации аппаратного обеспечения специального назначения для выполнения некоторых функций и процессора (например, одного или более запрограммированных микропроцессоров и связанной схемы) для выполнения других функций. Примеры компонентов контроллера, которые могут быть использованы в различных вариантах реализации настоящего изобретения, включают, но без ограничения, традиционные микропроцессоры, интегральные схемы специального назначения (ASIC) и программируемые пользователем вентильные матрицы (ППВМ).
[0018] В различных вариантах осуществления процессор или контроллер могут быть связаны с одним или более носителями информации (которые в целом называют в настоящем документе как «память», например, энергозависимая и энергонезависимая компьютерная память). В некоторых вариантах осуществления носитель информации может быть кодирован одной или более программами, которые выполняют по меньшей мере некоторые функции, описанные в настоящем документе, при исполнении на одном или более процессорах и/или контроллерах. Различные носители информации могут находиться в пределах процессора или контроллера, или могут перемещаться таким образом, что одна или более программ, хранящихся на них, могут быть загружены в процессор или контроллер таким образом, чтобы реализовать различные аспекты настоящего изобретения, описанные в настоящем документе. Термины «программа» и «компьютерная программа» используют в настоящем документе в обобщенном смысле для ссылки на любой тип компьютерного кода (например, программного кода или микрокода), который может быть реализован для программирования одного или более процессоров или контроллеров.
[0019] Используемый в данном документе термин «интерфейс пользователя» относится к интерфейсу между пользователем-человеком или оператором и одним или более устройствами, который обеспечивает связь между пользователем и устройством(ами). Примеры интерфейсов пользователя, которые могут быть использованы в различных вариантах осуществления настоящего изобретения, включают, но без ограничения, переключатели, потенциометры, кнопки, ручки регулировки, ползунки, трекболы, экраны дисплея, различные типы графических интерфейсов пользователя (ГИП), сенсорные экраны, микрофоны и другие типы датчиков, которые могут принимать некоторые виды генерируемых человеком воздействий и генерировать сигнал в ответ на них.
[0020] Следует понимать, что все комбинации приведенных выше замыслов и дополнительных замыслов, описанных более подробно ниже (при условии, что такие замыслы не являются взаимно несовместимыми), следует считать частью объекта настоящего изобретения, раскрытого в настоящем документе. В частности, все комбинации заявленного объекта изобретения, приведенные в конце настоящего раскрытия, считаются частью объекта настоящего изобретения, раскрытого в настоящем документе.
[0021] Эти и другие аспекты изобретения будут очевидны и разъяснены со ссылкой на вариант(ы) реализации, описанный(е) ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0022] На чертежах подобные ссылочные обозначения в целом относятся к одинаковым частям на всех видах. Кроме того, чертежи необязательно выполнены в масштабе, поскольку упор сделан на иллюстрации принципов настоящего изобретения.
[0023] На ФИГ. 1 схематически изображено устройство для ухода за полостью рта, в соответствии с вариантом реализации.
[0024] На ФИГ. 2 схематически изображена система управления в устройстве для ухода за полостью рта, в соответствии с вариантом реализации.
[0025] На ФИГ. 3 изображена схема способа отслеживания местоположения устройства для ухода за полостью рта, в соответствии с вариантом реализации.
[0026] На ФИГ. 4 схематически изображена полость рта пользователя, в соответствии с вариантом реализации.
[0027] На ФИГ. 5 схематически изображена полость рта пользователя, в соответствии с вариантом реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0028] В настоящем раскрытии описаны различные варианты реализации устройства для ухода за полостью рта, содержащего один или более датчиков, таких как акселерометр, гироскоп или магнитный датчик. В более широком смысле, Заявителем было найдено и выявлено, что было бы полезно представить устройство, которое определяет ориентацию головы пользователя во время сеанса чистки полости рта и использует данную информацию для отслеживания устройства для ухода за полостью рта во время сеанса чистки. Соответственно, способы и системы, описанные или иным образом представленные в настоящем документе, представляют устройство для ухода за полостью рта, которое отслеживает местоположение устройства с использованием одного или более датчиков без обязательной ориентации головки в начале сеанса чистки полости рта и/или без непосредственного измерения ориентации головки в начале сеанса чистки. В соответствии с вариантом реализации, устройство для ухода за полостью рта содержит один или более датчиков, которые определяют ориентацию головы пользователя на основе ограниченного перемещения устройства в пределах обозначенной области калибровки полости рта. Система комбинирует ориентацию головы пользователя с данными датчика движения от устройства для ухода за полостью рта для определения относительной ориентации устройства относительно рта пользователя, тем самым обеспечивая механизм отслеживания. Механизм отслеживания может быть использован для выдачи пользователю обратной связи о сеансе чистки полости рта.
[0029] Варианты реализации и осуществления, раскрытые или иным образом представленные в настоящем документе, могут быть использованы с любым устройством для ухода за полостью рта. Примеры подходящих устройств личной гигиены содержат зубную щетку, устройство для чистки зубной нитью, ирригатор для полости рта, устройство для чистки языка или другое устройство для ухода за полостью рта. Однако изобретение не ограничено данными перечисленными устройствами, и, таким образом, изобретение и варианты реализации, раскрытые в настоящем документе, могут охватывать любое устройство для ухода за полостью рта.
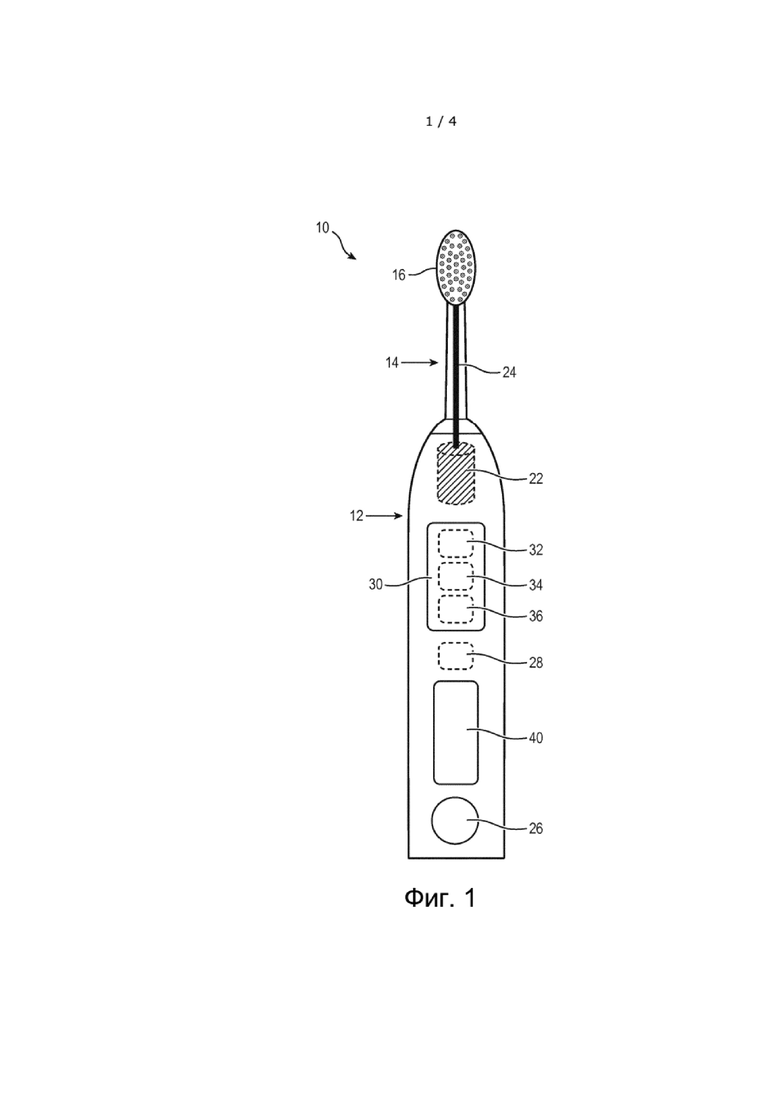
[0030] Ссылаясь на ФИГ. 1, в одном варианте реализации представлено устройство 10 для ухода за полостью рта, которое содержит рукоятку или корпусную часть 12 и головной элемент 14 устройства. Головной элемент 14 устройства содержит головку 16 устройства на конце, удаленном от корпусной части. Корпусная часть 12, как правило, содержит кожух, по меньшей мере часть которого является полой для размещения компонентов устройства для ухода за полостью рта. В соответствии с вариантом реализации, головной элемент 14 устройства установлен таким образом, чтобы иметь возможность перемещения относительно корпусной части 12. Движение может быть любым из множества различных движений, в числе прочих, включая колебания или вращения. Несмотря на то, что в настоящем варианте реализации устройство 10 для ухода за полостью рта изображено в виде вибрирующей зубной щетки, следует понимать, что также предусмотрены альтернативные варианты реализации устройства для ухода за полостью рта.
[0031] Корпусная часть 12 может содержать узел приводной передачи с мотором 22 для генерирования движения и компонент трансмиссии или вал 24 приводной передачи для передачи сгенерированных движений на головной элемент 14 устройства. Узел приводной передачи, помимо других компонентов, может содержать такие компоненты, как источник питания, генератор колебаний и один или более электромагнитов. В данном варианте реализации источник питания содержит одну или более перезаряжаемых аккумуляторных батарей, которые не показаны и могут, например, заряжаться от электричества в зарядном устройстве, в которое помещено устройство 10 для ухода за полостью рта, когда оно не используется. В соответствии с одним вариантом реализации, головной элемент 14 устройства установлен на валу 24 приводной передачи таким образом, что он может вибрировать относительно корпусной части 12. Головной элемент 14 устройства может быть неподвижно установлен на валу 24 приводной передачи или, в качестве альтернативы, может быть установлен с возможностью отсоединения таким образом, что головной элемент 14 устройства может быть заменен другим головным элементом устройства для различных рабочих функций, или когда щетина щетки или другой компонент головного элемента устройства изношен и требует замены. Корпусная часть 12 дополнительно снабжена средством 26 для ввода пользователя для активации и деактивации приводной передачи. Средство 26 для ввода пользователю позволяет пользователю управлять устройством 10 для ухода за полостью рта, например, включать и выключать устройство. Средство 26 для ввода пользователя может быть, например, кнопкой, сенсорным экраном или переключателем.
[0032] Устройство 10 для ухода за полостью рта содержит один или более датчиков 28. Датчик 28 показан на ФИГ. 1 внутри корпусной части 12, но может быть расположен в любом месте в пределах устройства, в том числе, например, внутри головного элемента 14 устройства или головки 16 устройства. Датчик 28 может содержать, например, инерциальный датчик движения, такой как акселерометр, гироскоп или магнитный датчик. В соответствии с вариантом реализации, датчик 28 выполнен с возможностью выдачи показаний шести осей относительного движения (трех осей переноса и трех осей вращения), с использованием, например, 3-осевого гироскопа и 3-осевого акселерометра. В качестве другого примера, датчик 28 выполнен с возможностью выдачи показаний девяти осей относительного движения с использованием, например, 3-осевого гироскопа, 3-осевого акселерометра и 3-осевого магнитометра. Отдельно или в сочетании с данными датчиками могут быть использованы другие датчики, включая, но без ограничения, датчик давления и другие типы датчиков, такие как емкостный датчик, камера, фотоэлемент, часы, таймер и другие типы датчиков. Могут быть использованы много разных типов датчиков, как описано или иным образом представлено в настоящем документе. В соответствии с вариантом реализации, датчик 28 выполнен с возможностью генерирования информации, являющейся показательной в отношении ускорения и угловой ориентации устройства 10 для ухода за полостью рта. Датчик может содержать два или более датчиков 28, которые функционируют вместе как 6-осевая или 9-осевая пространственная система датчиков.
[0033] Данные датчика, сгенерированные датчиком 28, выдаются на контроллер 30. В соответствии с вариантом реализации, датчик 28 является неотъемлемой частью контроллера 30. Контроллер 30 может быть образован из одного или множества модулей, а также выполнен с возможностью управления устройством 10 для ухода за полостью рта в ответ на ввод, такой как ввод, полученный с помощью средства 26 для ввода пользователя. Контроллер 30 может содержать, например, процессор 32 и память 34. Процессор 32 может принимать любую подходящую форму, включая, но без ограничения, микроконтроллер, несколько микроконтроллеров, электронные схемы, один процессор или множество процессоров. Память 34 может принимать любую подходящую форму, включая энергонезависимую память и/или ОЗУ. Энергонезависимая память может содержать постоянное запоминающее устройство (ПЗУ), накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Память может хранить, помимо прочего, операционную систему. ОЗУ используется процессором для временного хранения данных. В соответствии с вариантом реализации, операционная система может содержать код, который при исполнении контроллером 30 управляет действиями аппаратных компонентов устройства 10 для ухода за полостью рта. В соответствии с вариантом реализации, модуль 36 связи передает собранные данные датчика и может быть любым модулем, устройством или средством, способным передавать проводной или беспроводной сигнал посредством, в том числе, но без ограничения, Wi-Fi, Bluetooth, ближней бесконтактной связи и/или модулем сотовой связи.
[0034] В соответствии с вариантом реализации, устройство 10 для ухода за полостью рта может содержать интерфейс 40 пользователя, выполненный с возможностью выдачи информации пользователю до, во время и/или после сеанса чистки. Интерфейс 40 пользователя может принимать множество различных форм, но при этом он выполнен с возможностью выдачи информации пользователю. Например, информация касательно сеанса чистки может быть считана, просмотрена, услышана, тактильно ощущена и/или интерпретирована иным образом. В соответствии с вариантом реализации, интерфейс 40 пользователя обеспечивает обратную связь с пользователем, такую как управляемый сеанс чистки, которая содержит информацию о том, где и как следует осуществлять чистку. Соответственно, интерфейс пользователя может представлять собой дисплей, который выдает информацию пользователю, тактильный механизм, который выдает тактильную обратную связь пользователю, динамик для выдачи звуков или слов пользователю или любым из множества других механизмов интерфейса пользователя. Интерфейс 40 пользователя может быть расположен на устройстве 10 для ухода за полостью рта или может представлять собой удаленное устройство, такое как смартфон, планшет, смарт-часы, ноутбук или другое компьютеризированное устройство. В соответствии с вариантом реализации, контроллер 30 устройства 10 для ухода за полостью рта принимает информацию от датчика 28, оценивает и анализирует данную информацию и выдает информацию, которая может быть отображена пользователю через интерфейс 40 пользователя.
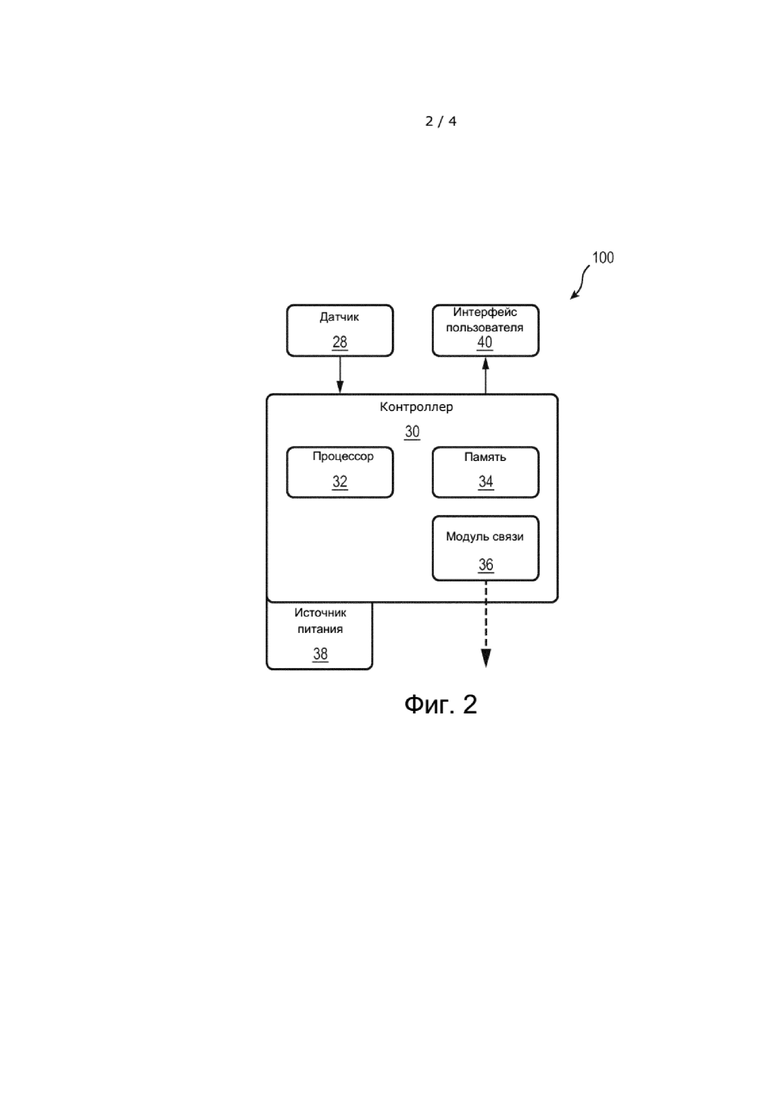
[0035] Ссылаясь на ФИГ. 2, в одном варианте реализации представлено схематическое изображение системы 100 управления устройством 10 для ухода за полостью рта. Система 100 управления устройством 10 для ухода за полостью рта содержит контроллер 30 с процессором 32, память 34, которая может хранить операционную систему, а также данные датчика, и модуль 36 связи. Устройство также содержит источник 38 питания, который может представлять собой источник питания переменного тока или питания от перезаряжаемой аккумуляторной батареи. Система 100 управления дополнительно содержит интерфейс 40 пользователя, который выполнен с возможностью передачи информации пользователю или ее приема от него. Датчик 28 системы, который может представлять собой инерциальный датчик движения, такой как акселерометр, гироскоп или магнитный датчик, генерирует данные датчика в ответ на движение и передает эти данные контроллеру 30.
[0036] Модуль 36 связи устройства может быть выполнен с возможностью и/или запрограммирован на передачу данных датчика на беспроводной приемопередатчик (не показан). Например, модуль 36 связи может передавать данные датчика посредством соединения Wi-Fi через сеть Интернет или Интранет стоматологу, базе данных или в другое местоположение. В качестве альтернативы, модуль 36 связи может передавать данные датчика или данные обратной связи посредством Bluetooth или другого беспроводного соединения на локальное устройство (например, отдельное вычислительное устройство), базу данных или другой приемопередатчик. Например, модуль 36 связи позволяет пользователю, среди прочего, передавать данные датчика в отдельную базу данных для длительного хранения, передавать данные датчика для дальнейшего анализа, передавать обратную связь с пользователем на отдельный интерфейс пользователя или делиться данными со стоматологом. Модуль 36 связи также может представлять собой приемопередатчик, который может принимать вводимую пользователем информацию, включая вышеупомянутые стандарты (что должно быть ясно специалисту в данной области техники при ознакомлении с настоящим изобретением). Другие сигналы связи и управления, описанные в настоящем документе, могут быть осуществлены посредством проводного (не беспроводного) соединения или комбинации беспроводных и не беспроводных соединений.
[0037] В соответствии с вариантом реализации, система 100 управления устройством 10 для ухода за полостью рта может быть запрограммирована и/или выполнена с возможностью определения ориентации головы пользователя во время использования устройства для ухода за полостью рта. Как описано в данном документе, информация или данные, анализируемые или используемые системой 100 управления устройства 10 для ухода за полостью рта для осуществления функций и способов, описанных в данном документе, могут быть сгенерированы одним или более датчиками 28. Например, контроллер 30 может быть запрограммирован и/или выполнен с возможностью осуществления: (i) обнаружения устройства для ухода за полостью рта в пределах одной или более областей калибровки в полости рта, (ii) оценки ориентации головы пользователя на основе ограниченного перемещения устройства в пределах области калибровки, и (iii) определения относительной ориентации устройства относительно рта пользователя путем комбинирования определенной ориентации головы пользователя и данных датчика движения от устройства для ухода за полостью рта.
[0038] Датчик 28 может быть любым из датчиков, описанных или иным образом представленных в настоящем документе, и может быть запрограммирован и/или выполнен с возможностью приема данных датчика в отношении одного или более аспектов движения пользователя (например, движения головы) во время сеанса чистки. Контроллер 30 может принимать данные датчика от датчика 28 в режиме реального времени или периодически. Например, датчик 28 может отправлять постоянный поток данных датчика контроллеру 30 для хранения и/или анализа, или может временно сохранять и агрегировать или обрабатывать данные перед отправкой их контроллеру 30. После приема контроллером 30 данные датчика могут быть обработаны процессором 32. В соответствии с вариантом реализации, обработка в целом может включать один или более следующих этапов: (i) нормализация или иная обработка данных датчика для дальнейшего анализа, (ii) извлечение сохраненных данных датчика из памяти 34 для анализа, (iii) анализ данных для определения того, находится ли устройство для ухода за полостью рта в пределах одной или более областей калибровки в полости рта, (iv) анализ данных для оценки ориентации головы пользователя на основе ограниченного перемещения устройства в пределах области калибровки, (v) анализ данных для определения относительной ориентации устройства относительно рта пользователя, (vi) отслеживание устройства для ухода за полостью рта во время сеанса чистки или, после сеанса чистки, определение его местоположения с использованием сохраненных данных, и (vii) вывод пользователю данных относительно обратной связи для сеанса чистки в индикации на интерфейсе 40 пользователя.
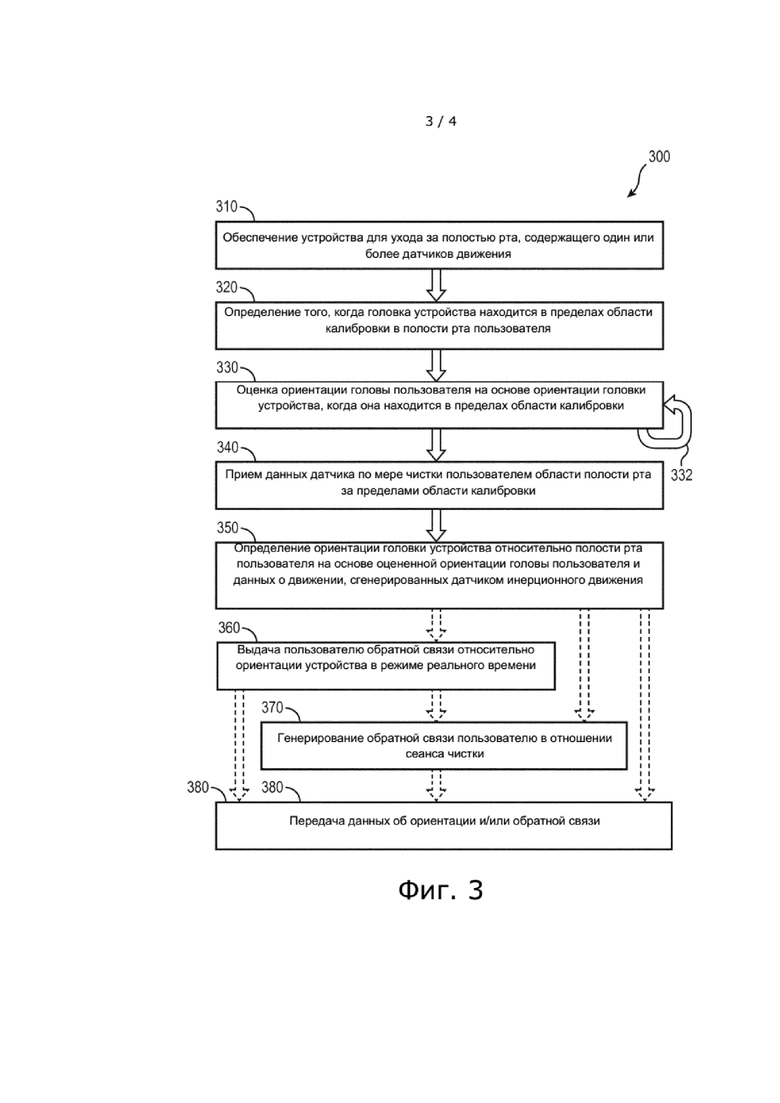
[0039] Ссылаясь на ФИГ. 3, в одном варианте реализации представлена схема последовательности операций способа 300 определения ориентации головы пользователя во время использования устройства для ухода за полостью рта. На этапе 310 способа обеспечивают устройство 10 для ухода за полостью рта. Устройство 10 для ухода за полостью рта может быть любым из устройств, описанных или иным образом представленных в настоящем документе. Устройство для ухода за полостью рта дополнительно содержит один или более датчиков 28. Датчик 28 может быть любым из датчиков, описанных или иным образом представленных в настоящем документе. Датчик 28 может содержать, например, инерциальный датчик движения, такой как акселерометр, гироскоп или магнитный датчик. В соответствии с вариантом реализации, датчик 28 выполнен с возможностью генерирования информации, являющейся показательной в отношении ускорения и угловой ориентации устройства 10 для ухода за полостью рта.
[0040] На этапе 320 способа система определяет, когда головка 16 устройства расположена в пределах области 110 калибровки полости 200 рта пользователя. Область калибровки представляет собой область в пределах полости рта пользователя, в которой существует физическое ограничение между устройством для ухода за полостью рта и головой пользователя. Например, области калибровки могут находиться в дальней задней молярной области, где устройство для ухода за полостью рта может принимать только ограниченное количество ориентаций ввиду ограниченного количества пространства в этой области. Соответственно, область 110 калибровки является областью, в которой устройство для ухода за полостью рта удерживается в целом в известной ориентации относительно головы, и, таким образом, как описано в данном документе, ориентация головы может быть получена, если известна ориентация головки устройства в зоне калибровки.
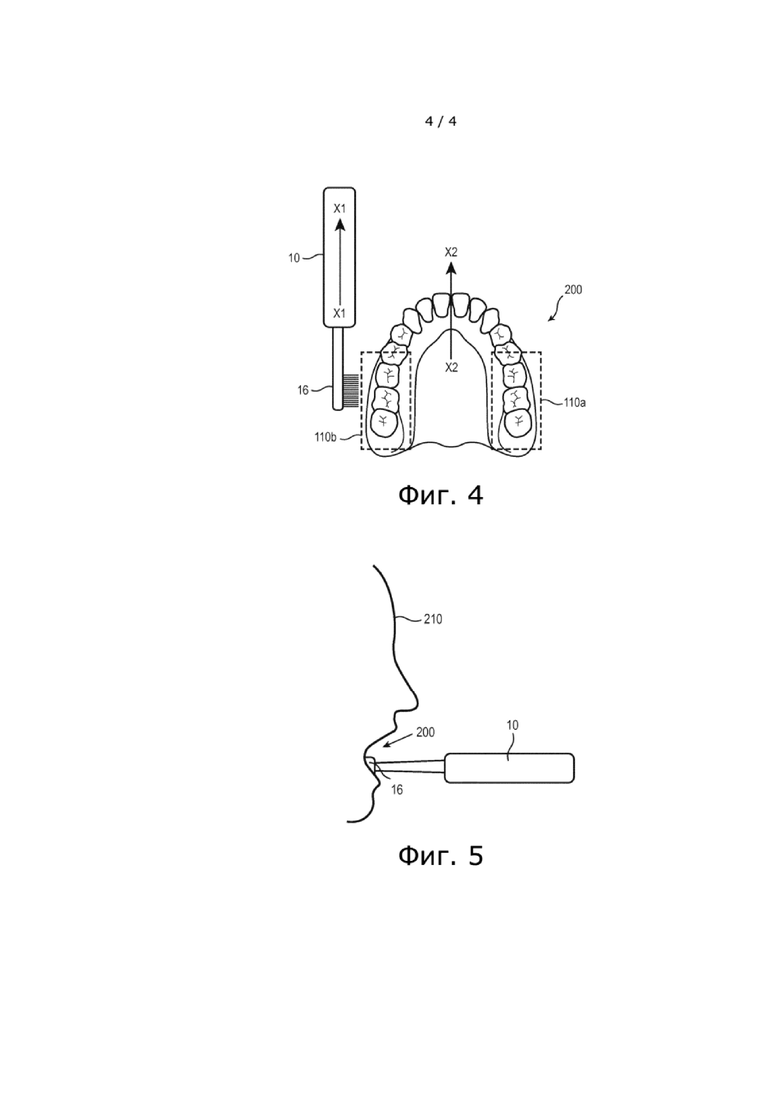
[0041] Ссылаясь на ФИГ. 4, например, схематически представлена полость 200 рта пользователя. Полость рта содержит несколько областей 110 калибровки, включая области 110a и 110b, которые расположены вблизи нижних задних моляров пользователя. Как описано в данном документе, когда система определяет, что головка 16 устройства расположена в пределах области калибровки, такой как область 110b калибровки на ФИГ. 4, определяют ориентацию устройства 10. В данном случае устройство 10 выровнено вдоль оси X1-X1. Следовательно, система может установить ориентацию головы пользователя, которая в данном случае находится вдоль соответствующей оси X2-X2.
[0042] Ссылаясь на ФИГ. 5, например, схематически представлен вид сбоку головы 210 пользователя и полости рта 200. Головка 16 устройства расположена в пределах области калибровки во рту пользователя, такой как нижняя правая задняя молярная область. Устройство 10 для ухода за полостью рта может принимать только определенную ориентацию тогда, когда головка 16 устройства правильным образом расположена в пределах области калибровки, как показано на ФИГ. 5. Подобным образом, голова пользователя, вероятно, примет определенную ориентацию, когда головка 16 устройства будет должным образом расположена в пределах области калибровки.
[0043] Существует несколько различных систем и способов, которые могут быть использованы для определения того, что головка 16 устройства расположена в пределах области 110 калибровки полости 200 рта пользователя. Например, пользователь может быть проинструктирован начать сеанс чистки в определенной области рта для обеспечения того, чтобы головка устройства должным образом была расположена в пределах области 110 калибровки. Во время данной фазы инструктирования системой осуществляется использование связи между осью устройства для ухода за полостью рта и ориентацией головы пользователя
[0044] В соответствии с другим вариантом реализации, устройство 10 для ухода за полостью рта может содержать второй датчик 28b (не показан), используемый для определения того, находится ли устройство в пределах области 110 калибровки полости 200 рта пользователя. Например, расстояние между рукояткой 12 устройства и лицом пользователя может быть измерено посредством датчика приближенности для определения того, что пользователь чистит моляры и, таким образом, устройство расположено в пределах области 110 калибровки. В качестве другого примера, акустические колебания рта могут быть использованы для определения того, является ли рот открытым или закрытым, таким образом, получая сведения об области, в которой находится устройство. Возможны многие другие конфигурации датчика.
[0045] В соответствии с другим вариантом реализации, датчик движения может быть использован для определения того, где в полости 200 рта пользователя находится устройство 10 для ухода за полостью рта. Например, датчик может генерировать данные датчика в ответ на типичные чистящие движения и может связывать данную информацию с шаблоном конкретных мест в пределах рта. В соответствии с вариантом реализации, различие в движении между передними зубами и молярами может быть использовано для определения того, какие образцы времени получены от моляров, а какие образцы собраны на передних зубах.
[0046] В соответствии с другим вариантом реализации, устройство или система может содержать заданную или полученную информацию о том, где в полости 200 рта пользователя, как правило, происходит активация устройства 10 для ухода за полостью рта. Например, система может определить после нескольких использований, что пользователь всегда начинает с нижнего правого внешнего квадранта.
[0047] В соответствии с вариантом реализации, устройство или система могут использовать два или более из данных подходов одновременно или последовательно для дополнительного уточнения локализации устройства 10 для ухода за полостью рта в полости рта 200 пользователя и, более конкретно, является ли данная локализация областью 110 калибровки. Например, прошлые сведения о вероятности типичного начального положения могут быть использованы вместе с оценкой, полученной от данных датчика, для достижения более высокой достоверности в локализации устройства 10 для ухода за полостью рта в полости 200 рта пользователя.
[0048] На этапе 330 способа система или устройство оценивает ориентацию головы пользователя на основе ориентации головки 16 устройства, когда она находится в пределах области 110 калибровки. Устройство использует очень ограниченный диапазон движения и число возможных ориентаций возможно, когда головка устройства расположена в пределах области калибровки. Когда головка 16 устройства расположена в пределах области 110 калибровки, существует необходимая взаимосвязь между ориентацией устройства для ухода за полостью рта и ориентацией головы пользователя. Устройство содержит информацию об этой взаимосвязи, такую как набор правил, сохраненный в памяти и/или полученную взаимосвязь, и, следовательно, может определять ориентацию головы пользователя на основе ориентации головки устройства или может определять ориентацию головки устройства на основе ориентации головы пользователя.
[0049] Соответственно, когда головка 16 устройства расположена в пределах области 110 калибровки, получение данных об ориентации и/или движении осуществляется от одного или более датчиков 28, и это используется для оценки ориентации головы пользователя. Эти данные датчика могут быть сгенерированы или получены непрерывно или периодически. Например, данные датчика могут быть получены только тогда, когда головка устройства находится в пределах области калибровки.
[0050] В соответствии с вариантом реализации, данные об ориентации и/или движении, собранные устройством, когда оно находится в пределах области 110 калибровки, могут быть сохранены для дальнейшей обработки. Поскольку пользователь может временно отклониться от ожидаемого поведения, могут быть применены дополнительные этапы обработки для повышения надежности оценки. Например, сохраненные данные могут быть отфильтрованы на предмет наличия резко выделяющихся значений перед усреднением и оценкой ориентации головы пользователя.
[0051] Для дополнительного учета отклонений фактического поведения пользователя по сравнению с номинальным или ожидаемым, может быть добавлен критерий выбора для того чтобы определить, являются ли новые данные подходящими для добавления к сохраненным данным. Данный критерий может быть сделан адаптивным к количеству данных в хранилище, а также к последовательности данных в хранилище. В соответствии с вариантом реализации, все данные от начала сеанса чистки сохраняются и фильтруются на предмет наличия резко выделяющихся значений. Позднее, новые данные добавляют в хранилище только если они соответствуют ожидаемым значениям, основанным на предыдущих данных.
[0052] Ввиду присутствия эффектов отклонения показаний датчика и медленных движений головы, самые недавние образцы могут иметь самую высокую степень достоверности. В типичном варианте реализации образцы с самой короткой историей имеют самые высокие долевые соотношения в окончательной оценке.
[0053] Для дополнительного повышения точности может быть применена компенсация известных вариаций наиболее подходящего поведения. В соответствии с вариантом реализации, заданные или полученные сведения о физической ловкости пользователя могут быть использованы для компенсации смещения в оценке системы координат рта.
[0054] Система может периодически обновлять ориентацию головы пользователя с использованием ориентации головки 16 устройства, когда она расположена в пределах области 110 калибровки. В соответствии с этапом 332 способа, система принимает информацию об ориентации головки устройства от одного или более датчиков 28 и использует данную информацию для обновления или восстановления оценки ориентации головы пользователя.
[0055] На этапе 340 способа пользователь очищает область полости рта за пределами области 110 калибровки, а один или более датчиков 28 устройства генерируют данные датчиков в отношении движения и/или ориентации устройства. Существует много способов и систем, выполненных с возможностью генерирования или приема этих данных датчика. Например, устройство 10 может содержать акселерометр и/или инерциальный датчик 28 движения, который генерирует данные датчика в отношении движения и/или ориентации устройства. Датчик 28 отправляет данные датчика контроллеру 30 автоматически либо в ответ на запрос. Генерирование и/или передача данных могут осуществляться непрерывно или периодически.
[0056] На этапе 350 способа определяют ориентацию головки устройства относительно полости рта пользователя на основе оцененной ориентации головы пользователя на этапе 330 способа и на основе данных о движении, сгенерированных посредством датчика на этапе 340 способа. В соответствии с вариантом реализации, система осуществила оценку ориентации головы пользователя на предыдущем этапе и получила информацию о движении устройства от одного или более датчиков 28. Используя ориентацию головы пользователя в качестве системы ориентиров, устройство может установить и, следовательно, отследить ориентацию и/или местоположение устройства для ухода за полостью рта, когда пользователь перемещает его по всему рту, осваивая новые ориентации и местоположения.
[0057] В соответствии с вариантом реализации, определенная ориентация головки устройства относительно полости рта пользователя может быть дополнительно уточнена. Например, может быть добавлена дополнительная информация для дополнения или улучшения оценки ориентации головы пользователя и решить проблемы с неизмеренными степенями свободы. Например, в соответствии с вариантом реализации, может быть установлено, что голова пользователя расположена прямо вверх. В качестве другого примера, взаимосвязь между устройством для ухода за полостью рта и ориентацией головы пользователя может быть различной в зависимости от области калибровки. Соответственно, данные варьирующиеся взаимосвязи, которые могут быть либо предварительно запрограммированы либо изучены, могут быть использованы для дальнейшего уточнения определенной ориентации головки устройства.
[0058] На необязательном этапе 360 способа, система или устройство выдает пользователю обратную связь в отношении определенной ориентации головки устройства относительно полости рта пользователя. Это может происходить по существу в режиме реального времени, то есть как только осуществляется генерирование информации и она становится доступной для пользователя. Обратная связь может содержать информацию об ориентации головки устройства, является ли ориентация правильной или неправильной, времени чистки, охвате, эффективности чистки и/или другую информацию. В соответствии с вариантом реализации, обратная связь может содержать количество времени, затрачиваемого на очистку конкретных сегментов во рту пользователя. В еще более дополненном механизме обратной связи пользователь может получать обратную связь об отдельных зубах в пределах области. Система может передавать пользователю информацию о том, какие области были очищены должным образом, а какие не были очищены должным образом. Обратная связь может быть выдана посредством обратной связи 40 с пользователем и может быть отображением на экране, отчетом или даже отдельным параметром среди других типов обратной связи.
[0059] Система может выдавать данные обратной связи в режиме реального времени пользователю или удаленной системе. Например, система может передавать данные обратной связи в режиме реального времени компьютеру посредством проводного или беспроводного сетевого соединения. В качестве другого примера, система может передавать сохраненные данные обратной связи компьютеру посредством проводного или беспроводного сетевого соединения. В дополнение к данным механизмам обратной связи, возможны многие другие механизмы. Например, обратная связь может объединять время чистки и эффективность в изображение на экране, отчет или даже один параметр среди других типов обратной связи.
[0060] На необязательном этапе 370 способа, система или устройство выдают обратную связь пользователю относительно всего сеанса чистки. Система собирает информацию о движении и ориентации устройства 10 во время сеанса чистки и составляет данную информацию в обратную связь. Данная обратная связь может быть аналогичной обратной связи, выданной в режиме реального времени на этапе 360.
[0061] На необязательном этапе 380 способа осуществляют передачу сгенерированной обратной связи пользователю, устройству и/или другому человеку. Обратная связь может быть обратной связью в режиме реального времени или обратной связью относительно одного или более сеансов чистки. В соответствии с вариантом реализации, выдачу обратной связи пользователю осуществляют посредством смартфона, компьютерной программы, базовой станции, удаленной программной службы или с помощью иных средств. В соответствии с другим вариантом реализации, обратную связь выдают непосредственно медицинскому работнику, такому как стоматолог или стоматолог-гигиенист. Например, информация об одном или более сеансах чистки может быть сохранена и передана медицинскому работнику автоматически или по запросу. В соответствии с вариантом реализации, информация может быть сохранена на смартфоне пользователя и затем передана в кабинет стоматолога во время визита, где осуществляется автоматическая загрузка информации посредством Bluetooth-соединения. Затем стоматолог может просмотреть обратную связь и использовать данную информацию во время ухода.
[0062] В соответствии с вариантом реализации, сгенерированные оценки ориентации и/или данные датчика движения могут быть дополнительно обработаны или проанализированы до того, как будут выданы пользователю или специалисту в качестве обратной связи. Например, данные от полного сеанса чистки могут быть объединены для получения оценки ориентации головы в нескольких временных точках. Могут быть использованы более дополненные способы, которые используют определенное распределение движений по сравнению с опорным значением. Например, внешние сведения относительно того, были ли образцы собраны в пределах области калибровки, могут не быть необходимыми, тем самым исключая необходимость в дополнительном руководстве или обнаружении. Например, система может использовать сведения о типичном пространственном распределении движений для полного сеанса чистки. В соответствии с вариантом реализации, среднее направление главной оси устройства 10 для ухода за полостью рта в течение выполненного сеанса может быть использовано для определения направления, в котором обращен пользователь. В соответствии с другим вариантом реализации, ориентация головы пользователя может быть оценена путем сопоставления относительной ориентации головы пользователя и устройства с типичным распределением в течение полного или частичного сеанса чистки. В одном варианте реализации это может быть выполнено путем минимизации расстояния между измеренными гистограммами углов чистки и шаблонной гистограммой углов чистки. Типичное распределение ориентации устройства относительно головы пользователя может быть получено, например, из лабораторных тестов и может быть представлено как распределение вероятностей.
[0063] Все определения, определенные и используемые в настоящем документе, обладают преимуществом перед определениями в словарях, определениями в документах, включенных в качестве ссылок, и/или обычными значениями определенных терминов.
[0064] Грамматические показатели единственного числа, используемые в настоящем документе в описании и в формуле изобретения следует понимать как «по меньшей мере одно», если явным образом не указано обратное.
[0065] Выражение «и/или», используемое в настоящем документе в описании и в формуле изобретения, следует понимать как «один или оба» из элементов, объединенных таким образом, т.е. элементов, которые совместно присутствуют в некоторых случаях и раздельно присутствуют в других случаях. Несколько элементов, перечисленных с помощью «и/или», следует толковать одинаково, т.е. «один или более» элементов, объединенных таким образом. Другие элементы могут присутствовать при необходимости, за исключением элементов, конкретно определенных с оговоркой «и/или», независимо от того, связаны они или не связаны с конкретно определенными элементами.
[0066] Используемый в настоящем документе в описании и в формуле изобретения союз «или» следует толковать с тем же значением, как «и/или», как определено выше. Например, при разделении пунктов в списке, «или» или «и/или» следует интерпретировать как включительные, т.е. включающие по меньшей мере одно, но также включающие более одного, из числа или списка элементов, и, при необходимости, дополнительные не включенные в список пункты. Напротив, только явно обозначенные термины, такие как «только один из» или «в точности один из», или, при использовании в формуле изобретения, «состоящие из», будет относиться к включению только одного элемента из числа или списка элементов. В целом, используемый здесь термин «или» следует интерпретировать лишь в качестве указания на исключительные альтернативы (т.е. «одно или другое, но не оба»), когда ему предшествуют условия исключительности, такие как «либо», «один из», «только один из» или «в точности один из».
[0067] Используемое в настоящем документе в описании и формуле изобретения выражение «по меньшей мере один» по отношению к списку из одного или более элементов следует понимать как означающее по меньшей мере один элемент, выбранный из любого одного или более элементов в списке элементов, но необязательно включающую по меньшей мере каждый элемент, конкретно указанный в списке элементов и не исключающий каких-либо комбинаций элементов в списке элементов. Данное определение также допускает, что присутствие элементов необязательно, за исключением элементов, конкретно указанных в списке элементов, к которым относится выражение «по меньшей мере один», независимо от того, присутствует ли связь между ними и определенными элементами.
[0068] Следует также понимать, что, если явным образом не указано обратное, в любых заявленных в настоящем документе способах, которые включают более одного этапа или действия, порядок шагов или действий способа не обязательно ограничен порядком, в котором перечислены этапы или действия способа.
[0069] В пунктах формулы изобретения, как и в представленном выше описании изобретения, все переходные выражения, такие как «содержащий», «включающий», «имеющий при себе», «имеющий», «вмещающий», «включающий в себя», «удерживающий», «составленный из» и т.п., следует понимать в качестве открытой конструкции, т.е. означающей наличие, но не ограничение. Только переходные выражения «состоящий из» и «состоящий по существу из» представляют собой закрытые или полузакрытые переходные выражениями, соответственно.
[0070] Несмотря на то, что в настоящем документе было описано и проиллюстрировано несколько вариантов реализации настоящего изобретения, специалистам в данной области техники будет легко представить множество других средств и/или конструкций для выполнения функций и/или получения результатов и/или одного или более из описанных в настоящем документе преимуществ, при этом каждое из таких изменений и/или модификаций следует рассматривать в пределах объема вариантов реализации изобретения, раскрытых в настоящем документе. В более широком смысле, специалистам в данной области техники будет легко понять, что все параметры, размеры, материалы и конфигурации, описанные в настоящем документе, приведены в качестве примера, и что фактические параметры, измерения, материалы и/или конфигурации будут зависеть от конкретного применения или применений, для которых используется/используются решение/решения по настоящему изобретению. Специалисты в данной области техники узнают или смогут установить, используя не более чем рутинные эксперименты, широкий ряд эквивалентов конкретных вариантов реализации изобретения, описанных в настоящем документе. Таким образом, следует понимать, что вышеприведенные варианты реализации представлены только в качестве примера и что в рамках объема прилагаемой формулы изобретения и ее эквивалентов изобретения могут быть реализованы на практике иным образом, отличным от того, который конкретно описан и заявлен. Варианты реализации изобретения, раскрытые в данном описании, относятся к каждому отдельному признаку, системе, изделию, материалу, набору и/или способу, описанным в настоящем документе. Кроме того, любая комбинация двух или более таких признаков, систем, изделий, материалов, наборов и/или способов, в случае если такие функции, системы, изделия, материалы, наборы и/или способы не являются взаимно несовместимыми, включена в объект настоящего изобретения.
Группа изобретений относится к способу определения ориентации головы пользователя посредством устройства для ухода за полостью рта, устройству для ухода за полостью рта, выполненному с возможностью определения ориентации головы пользователя, способу выдачи обратной связи о сеансе чистки. Способ определения ориентации головы пользователя посредством устройства для ухода за полостью рта включает следующие этапы: обеспечение устройства для ухода за полостью рта, содержащего головку устройства, по меньшей мере один датчик и контроллер, отслеживание устройства для ухода за полостью рта во время использования без ориентации головки в начале сеанса чистки и/или без измерения ориентации головки в начале сеанса чистки, определение того, когда головка устройства расположена в пределах области калибровки в полости рта пользователя, а также оценку ориентации головы пользователя посредством контроллера на основе ориентации головки устройства в пределах области калибровки. Технический результат - улучшение отслеживания устройства для ухода за полостью рта во время использования, включая определение ориентации головы пользователя с использованием данных датчика. 3 н. и 12 з.п. ф-лы, 5 ил. 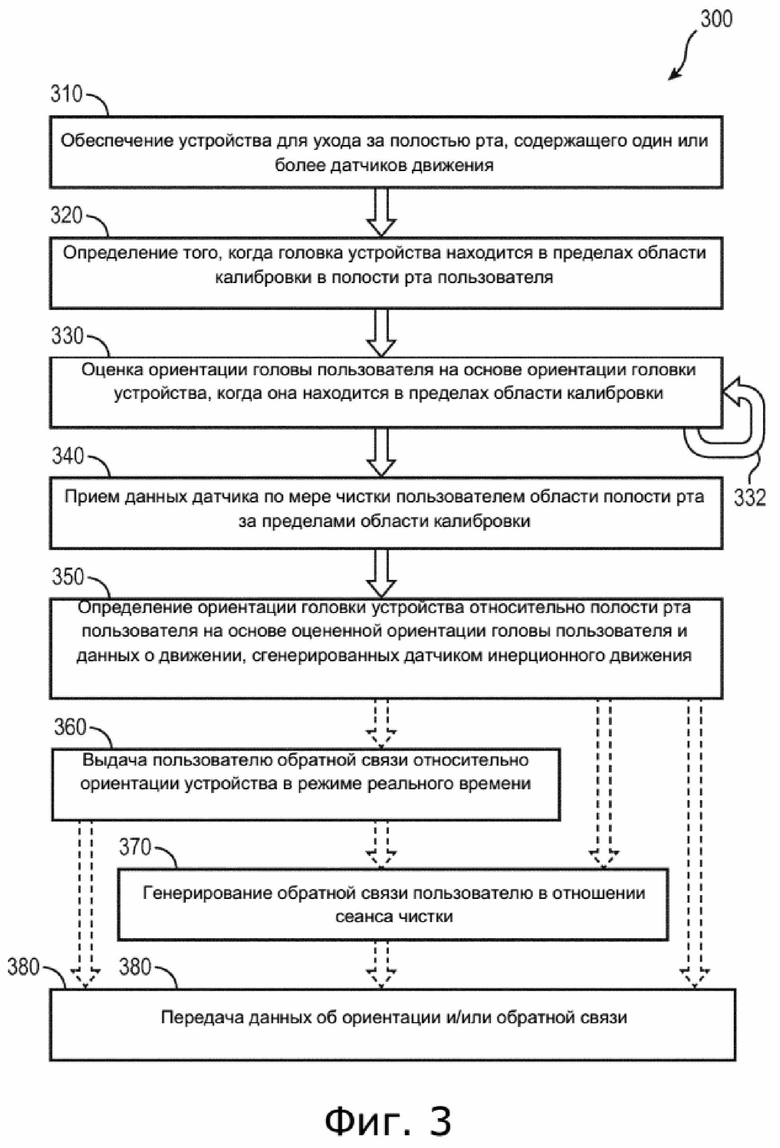
1. Способ (300) определения ориентации головы пользователя посредством устройства (10) для ухода за полостью рта, включающий следующие этапы:
обеспечение (310) устройства для ухода за полостью рта, содержащего головку (16) устройства, по меньшей мере один датчик (28) и контроллер (30),
отслеживание устройства (10) для ухода за полостью рта во время использования без ориентации головки в начале сеанса чистки и/или без измерения ориентации головки в начале сеанса чистки,
определение (320) того, когда головка устройства расположена в пределах области (110) калибровки в полости (200) рта пользователя,
оценку (330) ориентации головы пользователя посредством контроллера на основе ориентации головки устройства в пределах области калибровки.
2. Способ по п. 1, дополнительно включающий этап приема (340) данных от датчика относительно движения устройства для ухода за полостью рта в области за пределами области калибровки.
3. Способ по п. 2, дополнительно включающий этап определения (350), на основе оцененной ориентации головы пользователя и данных о движении, сгенерированных датчиком, ориентации головки устройства относительно полости рта пользователя для области за пределами области калибровки.
4. Способ по п. 1, дополнительно включающий этап выдачи (360) обратной связи пользователю относительно определенной ориентации и/или местоположения головки устройства относительно полости рта пользователя.
5. Способ по п. 1, в котором этап определения того, когда головка устройства расположена в пределах области калибровки в полости рта пользователя, содержит данные от второго датчика (28b).
6. Способ по п. 1, дополнительно включающий этап генерирования (370) обратной связи для сеанса чистки на основе множества оценок ориентации головки устройства относительно полости рта пользователя.
7. Способ по п. 6, дополнительно включающий этап передачи (380) сгенерированной обратной связи.
8. Способ по п. 1, в котором указанный датчик представляет собой инерциальный датчик движения.
9. Устройство (10) для ухода за полостью рта, выполненное с возможностью определения ориентации головы пользователя путем выполнения способа по п. 1, содержащее:
головку (16) устройства,
один или более датчиков (28) и
контроллер (30), выполненный с возможностью: (i) определения того, когда головка устройства находится в пределах области (110) калибровки полости (200) рта пользователя, и (ii) оценки ориентации головы пользователя на основе ориентации головки устройства в пределах области калибровки.
10. Устройство для ухода за полостью рта по п. 9, в котором контроллер дополнительно выполнен с возможностью приема данных от датчика относительно движения устройства для ухода за полостью рта в области за пределами области калибровки.
11. Устройство для ухода за полостью рта по п. 10, в котором контроллер дополнительно выполнен с возможностью определения, на основе оцененной ориентации головы пользователя и данных о движении, сгенерированных датчиком, ориентации головки устройства относительно полости рта пользователя для области за пределами области калибровки.
12. Устройство для ухода за полостью рта по п. 9, в котором контроллер дополнительно выполнен с возможностью генерирования обратной связи относительно определенной ориентации и/или местоположения головки устройства относительно полости рта пользователя.
13. Устройство для ухода за полостью рта по п. 12, в котором контроллер дополнительно выполнен с возможностью передачи сгенерированной обратной связи пользователю.
14. Способ (300) выдачи обратной связи о сеансе чистки, включающий следующие этапы:
обеспечение (310) устройства для ухода за полостью рта по п. 9, содержащего инерциальный датчик движения,
определение (320) того, когда головка устройства находится в пределах области (110) калибровки в полости (200) рта пользователя,
оценку (330) ориентации головы пользователя посредством контроллера на основе ориентации головки устройства в пределах области калибровки,
прием (340) данных от датчика относительно движения устройства для ухода за полостью рта в области за пределами области калибровки,
определение (350), на основе оцененной ориентации головы пользователя и данных о движении, сгенерированных датчиком, ориентации головки устройства относительно полости рта пользователя для области за пределами области калибровки, и
генерирование (360, 370) обратной связи относительно определенной ориентации головки устройства относительно полости рта пользователя.
15. Способ по п. 14, дополнительно включающий этап передачи (380) сгенерированной обратной связи.
| РЕГИОНАЛЬНЫЙ САМОЛЕТ | 2003 |
|
RU2244660C2 |
| CN 103764063 A, 30.04.2014 | |||
| CN 105029891 A, 11.11.2015 | |||
| US 2012310593 A1, 06.12.2012 | |||
| RU 2004124541 A, 10.02.2006. | |||

