Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится, в целом, к системам и способам для предоставления возможности точного определения местоположения и отслеживания устройства очистки полости рта во время направляемого сеанса очистки, имеющего множество отдельных интервалов времени.
Уровень техники
[0002] Правильная чистка зубов, включающая в себя длительность и охват очистки щеткой, помогает обеспечивать долговременное здоровое состояние зубов. Множество проблем с зубами возникает у тех людей, которые либо регулярно не чистят щеткой, либо иначе не чистят свои зубы, или которые делают это неправильно, особенно в конкретной области или зоне ротовой полости. Среди лиц, которые чистят регулярно, неправильные привычки очистки могут приводить в результате к плохому охвату очистки и, таким образом, поверхностям, которые очищаются в недостаточной мере во время сеанса очистки, даже когда соблюдается стандартный режим очистки, такой как чистка щеткой в течение двух минут дважды в день.
[0003] Чтобы обеспечивать правильную очистку, важно гарантировать, что производится достаточная очистка всех зубных поверхностей, включающих в себя области рта, которых трудно достичь, или которые имеют тенденцию неправильно очищаться в течение среднестатистического сеанса очистки. Одним способом, чтобы гарантировать достаточный охват, является предоставление указаний пользователю, направляющих использование устройства, и/или предоставление обратной связи пользователю во время или после сеанса очистки. Например, знание местоположения устройства во рту во время сеанса очистки является важным средством для создания улучшенной обратной связи о характере очистки пользователя, и/или для применения одной или более характеристик устройства согласно потребностям пользователя. Эта информация о местоположении может, например, быть использована для определения и предоставления обратной связи о характеристиках очистки, таких как охват и усилие.
[0004] Однако, отслеживание устройства очистки ротовой полости во время направляемого сеанса очистки имеет несколько ограничений. Например, требуется согласие пользователя с руководством для эффективной очистки. Дополнительно, для устройств, которые отслеживают местоположение головки устройства во рту, по меньшей мере, частично на основе направляемых местоположений, определение местоположения типично является неточным, если пользователь отказывается точно следовать направляемому сеансу.
[0005] Соответственно, существует непрерывная потребность в уровне технике для способов и устройств, которые предоставляют возможность точного определения местоположения и отслеживания устройства очистки ротовой полости во время направляемого сеанса очистки.
Сущность изобретения
[0006] Настоящее изобретение направлено на обладающие признаками изобретения способы и системы для определения местоположения устройства очистки полости рта во время направляемого сеанса очистки, имеющего множество отдельных временных интервалов. Применительно к системе, сконфигурированной, чтобы обеспечивать направляемый сеанс очистки, обладающие признаками изобретения способы и системы предоставляют возможность устройству или системе отслеживать устройство очистки полости рта во время сеанса очистки и предоставлять обратную связь пользователю о сеансе очистки. Система отслеживает местоположение устройства очистки полости рта во время направляемого сеанса очистки, содержащего множество временных интервалов, разделенных тактильным оповещением пользователя, которое предлагает пользователю перемещать устройство в новое местоположение. Соответственно, система использует данные о движении от одного или более датчиков, шаги и временные интервалы направляемого сеанса очистки, и модель поведения пользователя, чтобы оценивать местоположение устройства очистки ротовой полости в течение одного или более из множества временных интервалов сеанса очистки. Система может использовать информацию о местоположении, чтобы оценивать сеанс очистки и необязательно предоставлять обратную связь пользователю.
[0007] В целом, в одном аспекте, предоставляется способ для оценки местоположения устройства ухода за ротовой полостью во время направляемого сеанса очистки, содержащего множество временных интервалов. Способ включает в себя этапы: (i) предоставления устройства очистки ротовой полости, содержащего датчик, модуль формирования руководства, компонент обратной связи и контроллер; (ii) обеспечения, посредством модуля формирования руководства, направляемого сеанса очистки пользователю, при этом направляемый сеанс очистки содержит множество временных интервалов, разделенных подсказкой перехода из первого местоположения во рту во второе местоположение во рту, при этом подсказка формируется посредством компонента обратной связи; (iii) формирования, в течение одного из множества временных интервалов, данных датчика от датчика, указывающих позицию и перемещение устройства очистки полости рта; (iv) оценки, посредством контроллера на основе сформированных данных датчика, местоположения устройства очистки полости рта в течение одного из множества временных интервалов; (v) формирования модели для прогнозирования характера очистки пользователя; и (vi) определения местоположения устройства очистки полости рта в течение одного из множества временных интервалов, на основе оцененного местоположения устройства очистки полости рта и модели характера очистки пользователя.
[0008] Согласно варианту осуществления, способ дополнительно включает в себя этап предоставления обратной связи пользователю о сеансе очистки.
[0009] Согласно варианту осуществления, этап оценки содержит оценку вероятности для каждого из множества местоположений во рту пользователя, что устройство для ухода за полостью рта находилось в местоположении в течение одного из множества временных интервалов. Согласно варианту осуществления, этап оценки содержит статистическую модель или набор правил.
[0010] Согласно варианту осуществления, направляемый сеанс очистки дополнительно содержит подсказку, чтобы начинать сеанс очистки, и подсказку, чтобы заканчивать сеанс очистки. Согласно варианту осуществления, направляемый сеанс очистки содержит только подсказки. Согласно варианту осуществления, подсказка является визуальной подсказкой, звуковой подсказкой или тактильной подсказкой.
[0011] Согласно аспекту, предоставляется устройство очистки, сконфигурированное, чтобы оценивать местоположение устройства во время направляемого сеанса очистки, содержащего множество временных интервалов. Устройство очистки полости рта содержит: модуль формирования руководства, сконфигурированный, чтобы обеспечивать направляемый сеанс очистки пользователю, при этом направляемый сеанс очистки содержит множество временных интервалов, разделенных подсказкой перехода из первого местоположения во рту во второе местоположение во рту; датчик, сконфигурированный, чтобы формировать данные датчика в течение одного из множества временных интервалов, при этом данные датчика указывают позицию или перемещение устройства очистки; компонент обратной связи, сконфигурированный, чтобы формировать подсказки; и контроллер, сконфигурированный, чтобы: (i) оценивать, на основе сформированных данных датчика, местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов; (ii) формировать модель, чтобы прогнозировать характер очистки пользователя; и (iii) определять местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов, на основе оцененного местоположения устройства ухода за полостью рта и модели характера очистки пользователя.
[0012] Согласно аспекту, предоставляется устройство очистки, сконфигурированное, чтобы определять согласие пользователя с направляемым сеансом очистки. Устройство очистки включает в себя: (i) модуль формирования руководства, сконфигурированный, чтобы формировать направляемый сеанс очистки, содержащий множество временных интервалов, разделенных подсказкой перехода из первого местоположения во рту во второе местоположение во рту; (ii) модуль датчика, сконфигурированный, чтобы принимать от датчика данные датчика в течение одного из множества временных интервалов, при этом данные датчика указывают позицию или перемещение устройства очистки; (iii) модуль извлечения отличительного признака, сконфигурированный, чтобы извлекать один или более отличительных признаков из направляемого сеанса очистки и данных датчика; (iv) модуль модели поведения, сконфигурированный, чтобы формировать модель, чтобы прогнозировать характер очистки пользователя; и (v) модуль оценки местоположения, сконфигурированный, чтобы определять, на основе оцененного местоположения устройства ухода за полостью рта и модели характера очистки пользователя, местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов.
[0013] Согласно варианту осуществления, устройство очистки дополнительно включает в себя базу данных руководств, содержащую один или более сохраненных направляемых сеансов очистки.
[0014] Когда используется в данном документе в целях настоящего описания изобретения, термин "контроллер" используется, как правило, чтобы описывать различные устройства, относящиеся к работе устройства проточного зонда, системы или способа. Контроллер может быть реализован многочисленными способами (например, таким как с помощью специализированных аппаратных средств), чтобы выполнять различные функции, обсуждаемые в данном документе. "Процессор" является одним примером контроллера, который применяет один или более микропроцессоров, которые могут быть запрограммированы с помощью программного обеспечения (например, микрокода), чтобы выполнять различные функции, обсуждаемые в данном документе. Контроллер может быть реализован с или без применения процессора, а также может быть реализован как комбинация специализированных аппаратных средств, чтобы выполнять некоторые функции, и процессора (например, одного или более программируемых микропроцессоров и ассоциативно связанной схемы), чтобы выполнять другие функции. Примеры компонентов контроллера, которые могут использоваться в различных вариантах осуществления настоящего раскрытия сущности, включают в себя, но не только, традиционные микропроцессоры, специализированные интегральные схемы (ASIC) и программируемые пользователем вентильные матрицы (FPGA).
[0015] В различных реализациях процессор или контроллер может быть ассоциирован с одним или более носителями хранения информации (обобщенно называемыми в данном документе "памятью", например, энергозависимой и энергонезависимой компьютерной памятью). В некоторых реализациях, носители хранения данных могут быть кодированы с помощью одной или более программ, которые, когда выполняются на одном или более процессоров и/или контроллеров, осуществляют, по меньшей мере, некоторые из функций, поясненных в данном документе. Различные носители хранения информации могут быть зафиксированы в процессоре или контроллере или могут быть переносными, так что одна или более программ, сохраненных на них, могут быть загружены в процессор или контроллер с тем, чтобы осуществлять различные аспекты настоящего изобретения, обсуждаемые в данном документе. Термины "программа" или "компьютерная программа" используются в данном документе в общем смысле, чтобы ссылаться на любой тип компьютерного кода (например, программное обеспечение или микрокод), который может применяться, чтобы программировать один или более процессоров или контроллеров.
[0016] Термин "пользовательский интерфейс", когда используется в данном документе, ссылается на интерфейс между человеком-пользователем или оператором и одним или более устройствами, который позволяет связь между пользователем и устройством(ами). Примеры пользовательских интерфейсов, которые могут применяться в различных реализациях настоящего изобретения, включают в себя, но не только, переключатели, потенциометры, кнопки, диски набора, ползунки, трекболы, экраны отображения, различные типы графических пользовательских интерфейсов (GUI), сенсорные экраны, микрофоны и другие типы датчиков, которые могут принимать некоторую форму формируемого человеком возбуждающего воздействия и формировать сигнал в ответ на него.
[0017] Следует принимать во внимание, что все комбинации вышеприведенных принципов и дополнительных принципов, подробнее поясненных ниже (если такие принципы не являются взаимно несогласованными), считаются частью изобретаемого предмета изобретения, раскрытого в данном документе. В частности, все комбинации заявленного предмета изобретения, указанного в конце этого раскрытия сущности, считаются частью изобретаемого предмета изобретения, раскрытого в данном документе.
[0018] Эти и другие аспекты изобретения будут поняты и разъяснены со ссылкой на вариант(ы) осуществления, описанные далее в данном документе.
Краткое описание чертежей
[0019] На чертежах аналогичные ссылки с номером, в общем, ссылаются на идентичные части в различных представлениях. Кроме того, чертежи необязательно начерчены в масштабе, вместо этого акцент делается на понятности иллюстрирования принципов изобретения.
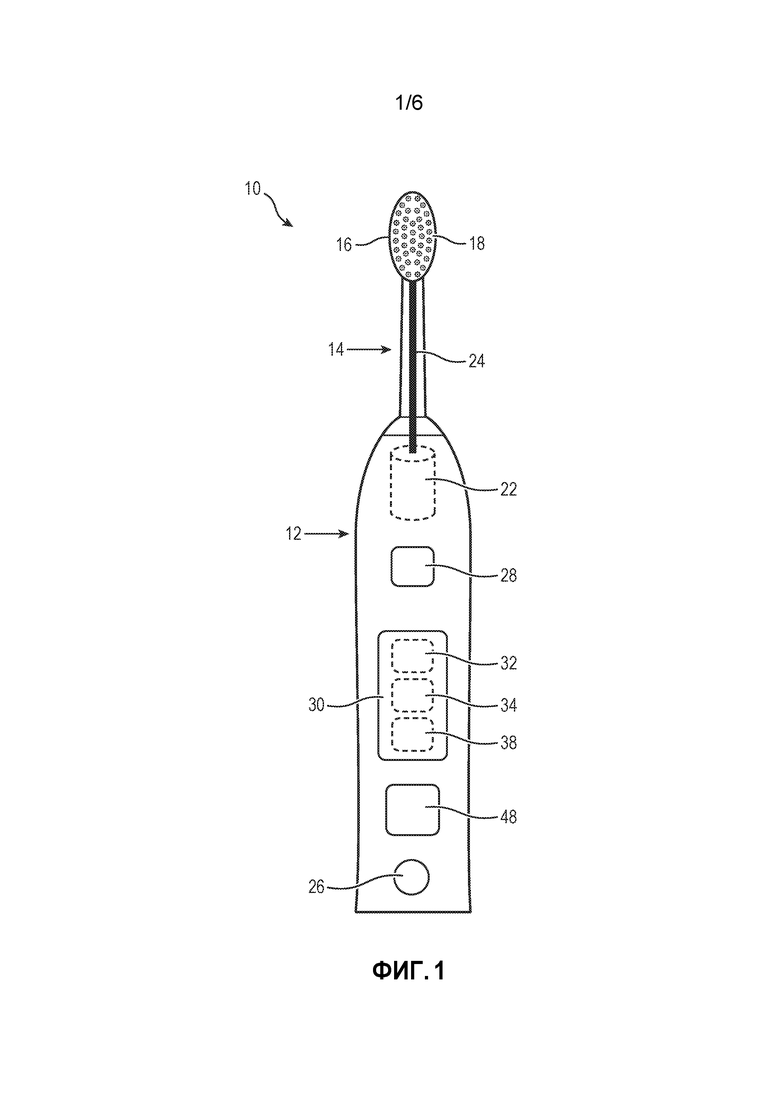
[0020] Фиг. 1 - это схематичное представление устройства очистки полости рта в соответствии с вариантом осуществления.
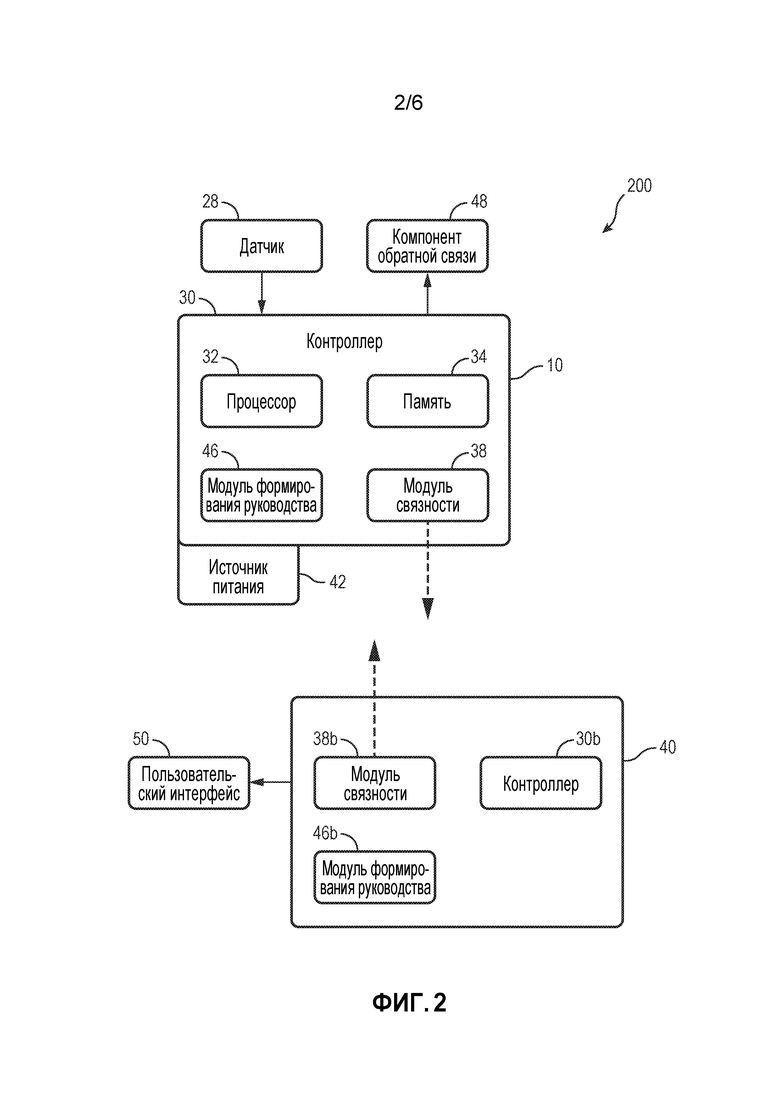
[0021] Фиг. 2 - это схематичное представление устройства очистки полости рта в соответствии с вариантом осуществления.
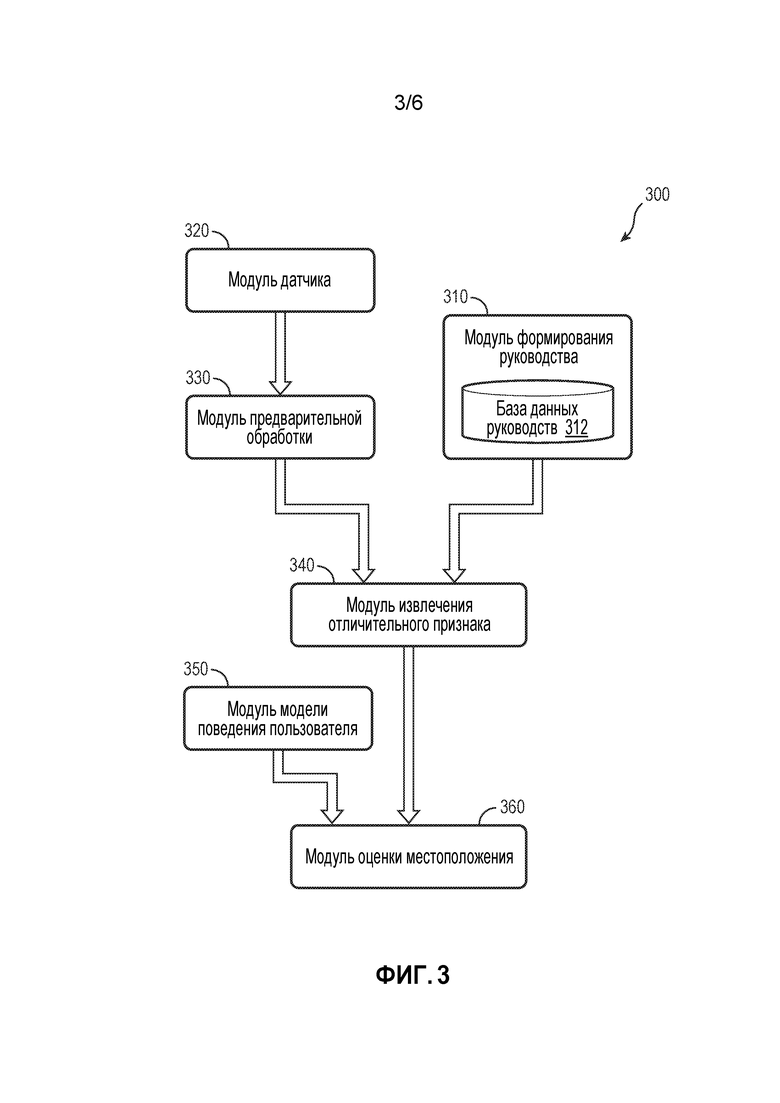
[0022] Фиг. 3 - это схематичное представление устройства очистки полости рта в соответствии с вариантом осуществления.
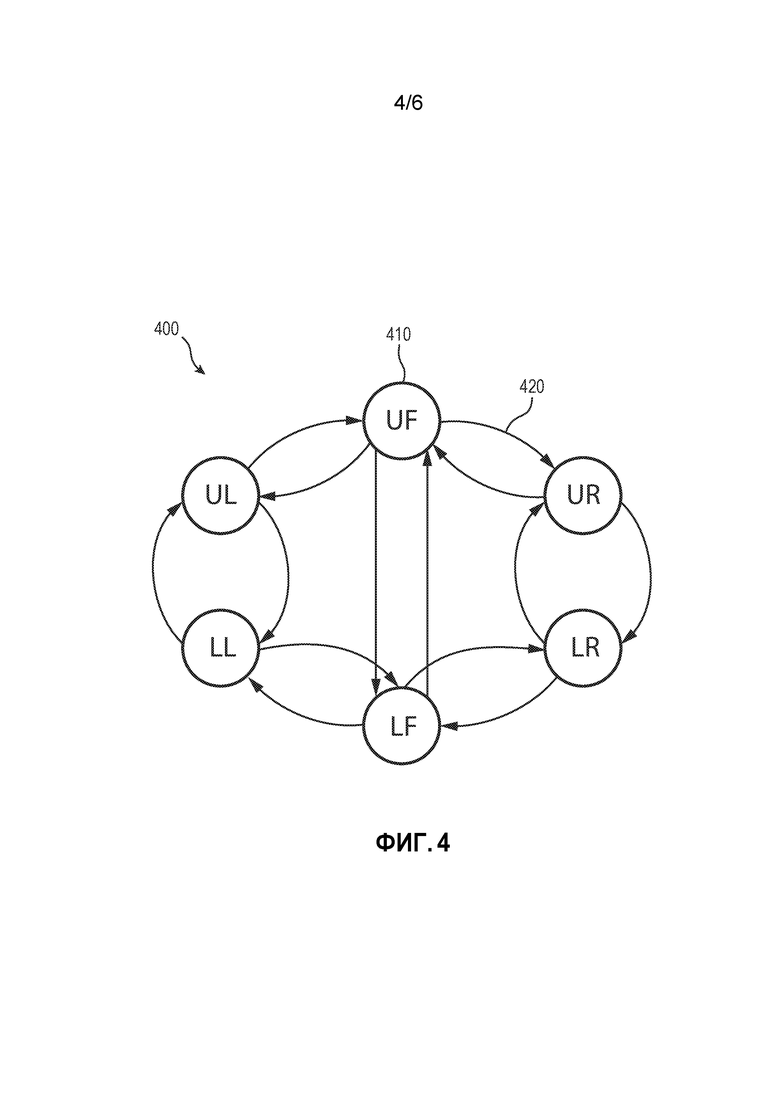
[0023] Фиг. 4 - это схематичное представление скрытой Марковской модели для оценки местоположения устройства очистки полости рта в соответствии с вариантом осуществления.
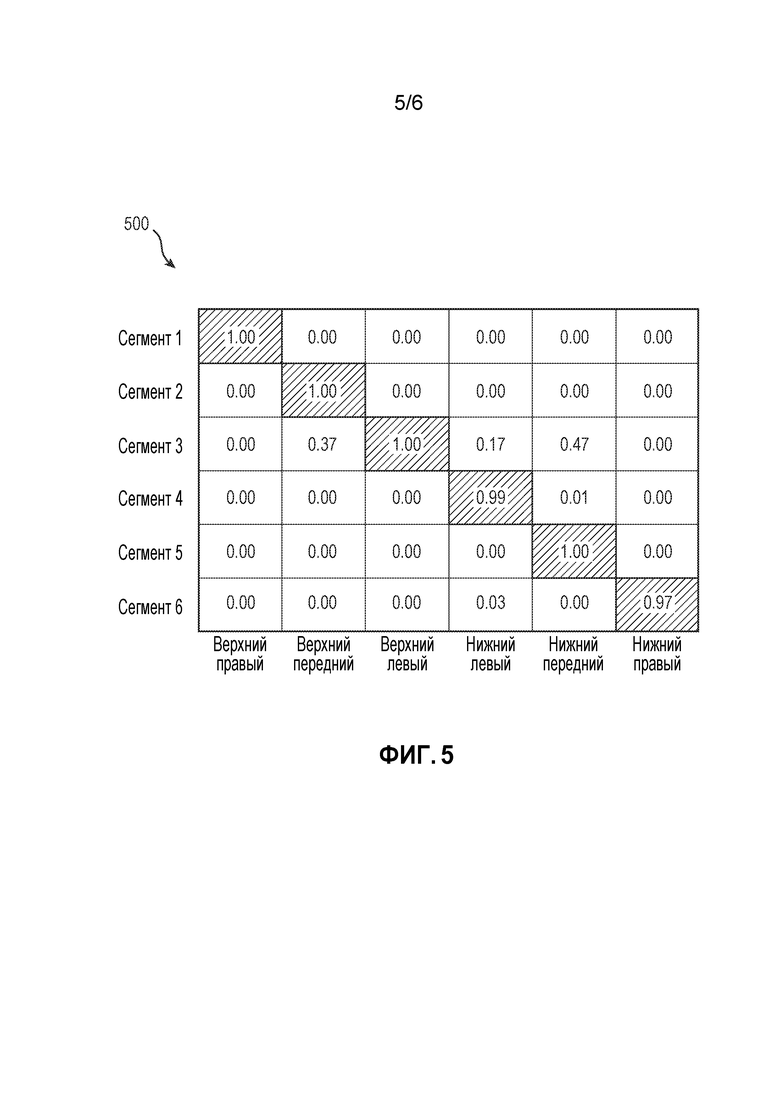
[0024] Фиг. 5 - это таблица вероятностей местоположения в течение направляемого сеанса очистки, в соответствии с вариантом осуществления.
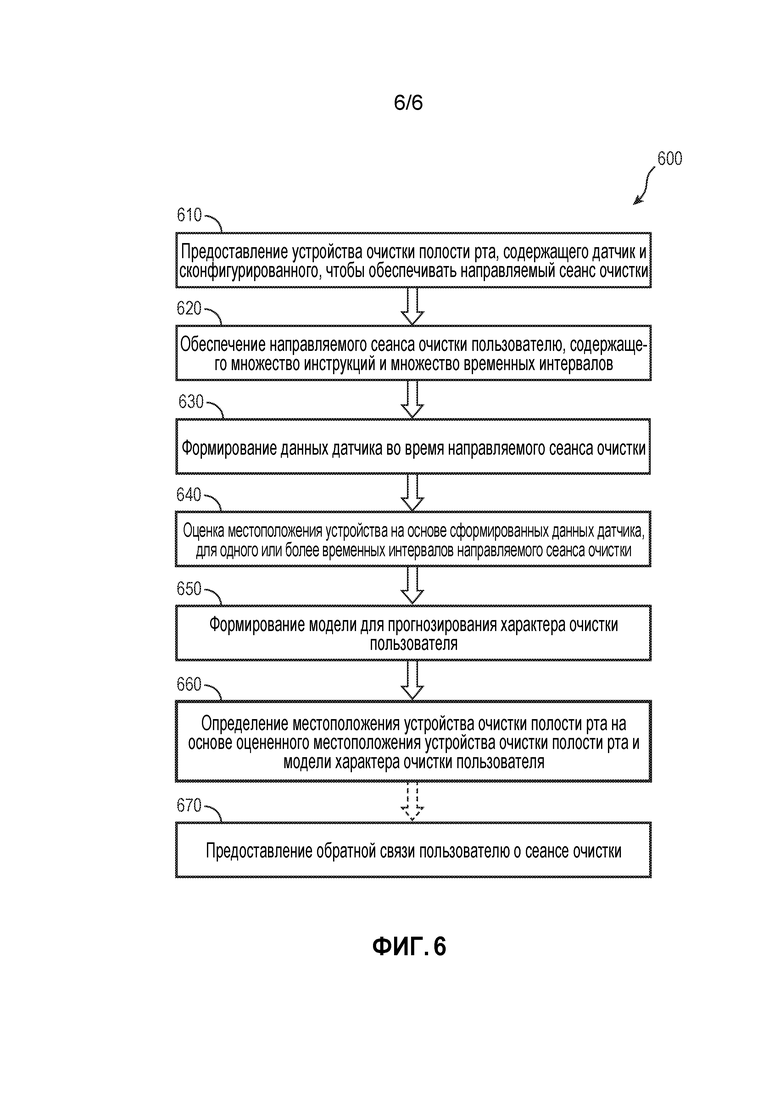
[0025] Фиг. 6 - это блок-схема последовательности операций способа для определения местоположения устройства очистки полости рта в течение направляемого сеанса очистки, имеющего множество отдельных временных интервалов, в соответствии с вариантом осуществления.
Подробное описание вариантов осуществления
[0026] Настоящее изобретение описывает различные варианты осуществления способа и устройства для определения местоположения устройства очистки полости рта в течение направляемого сеанса очистки, имеющего множество отдельных временных интервалов. В более общем смысле, заявитель признает и понимает, что будет полезно предоставить систему, сконфигурированную, чтобы оценивать сеанс очистки и предоставлять обратную связь пользователю. Соответственно, способы, описанные или иначе предполагаемые в данном документе, предоставляют устройство очистки полости рта, сконфигурированное, чтобы обеспечивать направляемый сеанс очистки пользователю, содержащий множество отдельных временных интервалов, разделенных тактильным оповещением, чтобы получать данные датчика от одного или более датчиков, и чтобы оценивать местоположение устройства очистки полости рта в течение каждого из множества отдельных интервалов времени. Согласно варианту осуществления направляемый сеанс очистки содержит множество отдельных интервалов времени, разделенных тактильным оповещением, но не содержит инструкции определения местоположения, и, таким образом, пользователь свободен выбирать, какие участки рта в каком порядке очищаются. Согласно варианту осуществления, устройство очистки полости рта оценивает сеанс очистки на основе оцененных данных о местоположении и необязательно содержит механизм обратной связи, чтобы предоставлять обратную связь пользователю о сеансе очистки.
[0027] Варианты осуществления и реализации, раскрытые или иначе предполагаемые в данном документе, могут быть использованы с любым ротовым устройством, включающим в себя, но не только, зубную щетку, устройство очистки зубной нитью, такое как Philips AirFloss®, ороситель полости рта или любое другое ротовое устройство. Одной конкретной целью использования вариантов осуществления и реализаций в данном документе является предоставление информации об очистке и обратной связи с помощью устройства очистки ротовой полости, такого как, например, зубная щетка Philips Sonicare® (произведенной компанией Koninklijke Philips Electronics, N.V.). Однако, описание изобретения не ограничивается зубной щеткой, и, таким образом, описание изобретения и варианты осуществления, раскрытые в данном документе, могут охватывать любое устройство ухода за полостью рта.
[0028] Обращаясь к фиг. 1, в одном варианте осуществления предоставляется устройство 10 очистки полости рта, которое включает в себя фрагмент 12 корпуса и элемент 14 головки устройства, установленный на фрагмент корпуса. Элемент 14 головки устройства включает в себя на своем конце, удаленном от фрагмента корпуса, головку 16. Головка 16 включает в себя лицевую поверхность 18, которая используется для очистки.
[0029] Согласно варианту осуществления, элемент 14 головки устройства, головка 16 и/или лицевая поверхность 18 устанавливаются так, чтобы быть приспособленными перемещаться относительно фрагмента 12 корпуса. Перемещение может быть любым из множества различных перемещений, включающих в себя вибрации или вращение, среди прочих. Согласно одному варианту осуществления, элемент 14 головки устройства устанавливается на корпус так, чтобы иметь возможность вибрировать относительно фрагмента 12 корпуса, или, в качестве другого примера, головка 16 устанавливается на элемент 14 головки устройства так, чтобы быть приспособленным вибрировать относительно фрагмента 12 корпуса. Элемент 14 головки устройства может быть неподвижно установлен на фрагмент 12 корпуса, или он может альтернативно быть съемным образом установлен так, что элемент 14 головки устройства может быть заменен новым элементом, когда компонент устройства изнашивается и требует замены.
[0030] Согласно варианту осуществления, фрагмент 12 корпуса включает в себя цепь 22 привода для создания движения и компонент 24 передачи для передачи сформированных движений элементу 14 головки устройства. Например, цепь 22 привода может содержать мотор или электромагнит(ы), которые создают движение компонента 24 передачи, которое затем передается элементу 14 головки устройства. Цепь 22 привода может включать в себя такие компоненты как источник питания, осциллятор и один или более электромагнитов, среди других компонентов. В этом варианте осуществления источник питания содержит один или более перезаряжаемых аккумуляторов, не показаны, которые могут, например, электрически заряжаться в зарядном держателе, в который устройство 10 очистки полости рта помещается, когда не используется.
[0031] Хотя в варианте осуществления, показанном на некоторых из чертежей в данном документе, устройство 10 очистки полости рта является электрической зубной щеткой, будет понятно, что в альтернативном варианте осуществления устройство очистки полости рта может быть ручной зубной щеткой (не показана). В такой конфигурации ручная зубная щетка имеет электрические компоненты, но головка щетки механически не приводится в действие посредством электрического компонента. Дополнительно, устройство 10 очистки полости рта может быть любым устройством из множества устройств очистки полости рта, таким как устройство очистки зубной нитью, ороситель полости рта или любое другое устройство ухода за полостью рта.
[0032] Фрагмент 12 корпуса дополнительно снабжается средством 26 пользовательского ввода, чтобы активировать и деактивировать генератор 22 движения. Средство 26 пользовательского ввода предоставляет возможность пользователю задействовать устройство 10 очистки полости рта, например, включать его и выключать. Средство 26 пользовательского ввода может быть, например, кнопкой, сенсорным экраном или переключателем.
[0033] Устройство 10 очистки полости рта включает в себя один или более датчиков 28. Датчик 28 показан на фиг. 1 в фрагменте 12 корпуса, но может быть расположен где угодно в устройстве, включая в себя, например, в элементе 14 головки устройства или головке 16. Датчики 28 могут содержать, например, 6-осную или 9-осную систему пространственных датчиков и могут включать в себя одно или более из акселерометра, гироскопа и/или магнитометра, чтобы предоставлять показатели относительно осей движения устройства очистки полости рта и характеризовать ориентацию и смещение устройства. Например, датчик 28 может быть сконфигурирован, чтобы предоставлять показатели шести осей относительного движения (трехосное перемещение и трехосное вращение) с помощью, например, 3-осного гироскопа и 3-осного акселерометра. Множество других конфигураций являются возможными. Другие датчики могут быть использованы либо автономно, либо вместе с этими датчиками, включающие в себя, но не только, датчик давления (например, датчик на эффекте Холла) и другие типы датчиков, такие как датчик, измеряющий электромагнитные колебания в предварительно определенном диапазоне длин волн, емкостной датчик, камера, фотоэлемент, датчик видимого света, датчик ближнего инфракрасного диапазона, датчик радиоволн и/или один или более других типов датчиков. Множество различных типов датчиков может быть использовано, как описано или иначе предполагается в данном документе. Согласно варианту осуществления, эти дополнительные датчики предоставляют дополнительную информацию о позиции устройства относительно части тела пользователя, фиксированной точки и/или одной или более других позиций. Согласно варианту осуществления, датчик 28 располагается в предварительно определенной позиции и ориентации в устройстве 10 очистки полости рта, и головка щетки находится в фиксированном пространственном относительном размещении по отношению к датчику 28. Следовательно, ориентация и позиция головки щетки могут быть легко определены на основе известной ориентации и позиции датчика 28.
[0034] Согласно варианту осуществления, датчик 28 конфигурируется, чтобы формировать информацию, указывающую ускорение и угловую ориентацию устройства 10 очистки полости рта. Например, система датчиков может содержать два или более датчиков 28, которые функционируют вместе как 6-осная или 9-осная система пространственных датчиков. Согласно другому варианту осуществления, интегрированный 9-осный пространственный датчик может обеспечивать экономию пространства в ротовом чистящем устройстве 10.
[0035] Информация, сформированная посредством первого датчика 28, предоставляется контроллеру 30. Контроллер 30 может быть сформирован из одного или множества модулей и конфигурируется, чтобы задействовать устройство 10 очистки полости рта в ответ на входные данные, такие как входные данные, полученные через средство 26 пользовательского ввода. Согласно варианту осуществления, датчик 28 является встроенным в контроллер 30. Контроллер 30 может содержать, например, по меньшей мере, процессор 32, память 34 и модуль 38 связности. Процессор 32 может принимать любую подходящую форму, включающую в себя, но не только, микроконтроллер, множество микроконтроллеров, электрическую схему, единственный процессор или множество процессоров. Память 34 может принимать любую подходящую форму, включающую в себя энергонезависимую память и/или RAM. Энергонезависимая память может включать в себя постоянное запоминающее устройство (ROM), накопитель на жестком диске (HDD) или твердотельный накопитель (SSD). Память может хранить, среди прочего, операционную систему. RAM используется процессор для временного хранения данных. Согласно варианту осуществления, операционная система может содержать код, который, когда исполняется контроллером 30, управляет работой аппаратных компонентов устройства 10 очистки полости рта. Согласно варианту осуществления, модуль 38 связности передает собранные данные датчика и может быть любым модулем, устройством или средством, приспособленным передавать проводной или беспроводной сигнал, включающим в себя, но не только, Wi-Fi, Bluetooth, модуль связи малого радиуса действия и/или сотовый модуль.
[0036] Согласно варианту осуществления, устройство 10 очистки полости рта включает в себя компонент 48 обратной связи, сконфигурированный, чтобы предоставлять информацию пользователю. Например, компонент обратной связи может быть компонентом 48 визуальной обратной связи, который предоставляет одну или более визуальных подсказок пользователю, что он может переходить от текущего места очистки к новому месту очистки. В качестве другого примера, компонент обратной связи может быть компонентом 48 звуковой обратной связи, который предоставляет одну или более звуковых подсказок пользователю, что он может переходить от текущего места очистки к новому месту очистки. В качестве другого примера, компонент обратной связи может быть компонентом 48 тактильной обратной связи, таким как любой вибратор, который будет вибрировать, чтобы указывать, что пользователь, который держит устройство, должен переходить от текущего места очистки к новому месту очистки. Альтернативно, компонент 48 обратной связи может содержать различимую визуальную подсказку, звуковую подсказку или вибрацию, чтобы указывать, что сеанс очистки должен начаться, а также различимую визуальную подсказку, звуковую подсказку или вибрацию, чтобы указывать, что сеанс очистки должен закончиться. Согласно варианту осуществления, следовательно, компонент 48 обратной связи и/или контроллер 30 содержат таймер, сконфигурированный, чтобы отслеживать множество отдельных временных интервалов и предоставлять необходимую обратную связь с соответствующими интервалами.
[0037] Обращаясь к фиг. 2, в одном варианте осуществления, представлена система 200 очистки ротовой полости, содержащая устройство 10 очистки ротовой полости и необязательное удаленное устройство 40, которое является отдельным от устройства очистки ротовой полости. Устройство 10 очистки ротовой полости может быть любым из вариантов осуществления устройства очистки ротовой полости, раскрытых или иначе предполагаемых в данном документе. Например, согласно варианту осуществления, устройство 10 очистки ротовой полости включает в себя один или более датчиков 28, контроллер 30, содержащий процессор 32, и источник 42 питания. Устройство 10 очистки ротовой полости также содержит модуль 38 связности. Модуль 38 связности передает собранную информацию датчика удаленному устройству 40 и может быть любым модулем, устройством или средством, приспособленным для передачи проводного или беспроводного сигнала, включающим в себя Wi-Fi, Bluetooth, модуль связи малого радиуса действия и/или сотовый модуль.
[0038] Устройство 10 очистки ротовой полости также содержит модуль 46 формирования руководства, сконфигурированный, чтобы формировать руководящие инструкции для пользователя перед, во время и/или после сеанса очистки. Руководящие инструкции могут быть извлечены из или основаны, например, на предварительно определенном алгоритме очистки и/или из информации об одном или более предыдущих сеансах очистки. Руководящие инструкции содержат, например, визуальную подсказку, звуковую подсказку или тактильную подсказку, чтобы указывать, что сеанс очистки должен начаться, множество пошаговых подсказок во время сеанса очистки, чтобы указывать пользователю, что он должен переходить с текущего места на новое место, ранее неочищенное, а также визуальную подсказку, звуковую подсказку или тактильную подсказку, чтобы указывать, что сеанс очистки следует закончить.
[0039] Согласно варианту осуществления, удаленное устройство 40 может быть любым устройством, сконфигурированным или приспособленным для связи с устройством 10 очистки полости рта. Например, удаленное устройство 40 может быть держателем устройства очистки или станцией, устройством смартфона, компьютером, планшетом, сервером или любым другим компьютеризированным устройством. Согласно варианту осуществления, удаленное устройство 40 включает в себя модуль 38b связи, который может быть любым модулем, устройством или средством, приспособленным для приема проводного или беспроводного сигнала, включающим в себя, но не только, Wi-Fi, Bluetooth, модуль связи малого радиуса действия и/или сотовый модуль. Устройство 40 также включает в себя контроллер 30b, который использует принятую информацию от датчика 28, отправленную через модуль 38 связности. Согласно варианту осуществления, удаленное устройство 40 включает в себя пользовательский интерфейс 50, сконфигурированный, чтобы предоставлять инструкции направляемого сеанса очистки пользователю, такие как информация о том, когда переходить от текущего места очистки во рту к новому месту, ранее неочищенному. Пользовательский интерфейс 50 может принимать множество различных форм, таких как тактильный интерфейс, визуальный интерфейс, звуковой интерфейс или другие формы. Согласно варианту осуществления, удаленное устройство 40 может также включать в себя модуль 46b формирования руководства, сконфигурированный, чтобы формировать руководящие инструкции для пользователя перед, во время и/или после сеанса очистки. Руководящие инструкции могут быть извлечены из или основаны, например, на предварительно определенном алгоритме очистки и/или из информации об одном или более предыдущих сеансах очистки.
[0040] Например, удаленное устройство 40 может быть смартфоном пользователя, переносным компьютером, карманным или носимым компьютером или портативным инструктирующим устройством. Смартфон формирует инструкции очистки через модуль 46b формирования руководства, который может быть, например, приложением смартфона, и предоставляет инструкции очистки пользователю через динамики смартфона и/или визуальный дисплей. Согласно варианту осуществления, устройство 10 очистки полости рта получает данные датчика от датчика 28 во время направляемого сеанса очистки, представляющие данные о местонахождении для устройства очистки полости рта, и отправляет эти данные контроллеру 30 устройства очистки полости рта и/или контроллеру 30b удаленного устройства.
[0041] Обращаясь к фиг. 3, в одном варианте осуществления, представлена система 300 очистки полости рта. Система 300 очистки полости рта является вариантом осуществления устройства 10 очистки полости рта, которое может быть любым из вариантов осуществления устройства очистки полости рта, раскрытых или иначе предполагаемых в данном документе. Согласно варианту осуществления, устройство очистки полости рта обеспечивает пользователю направляемый сеанс очистки, включающий в себя множество инструкций очистки, когда пользователь принимает уведомление перейти от одной области рта к другой области, без приема информации о том, к какой области переходить далее. Необязательно, пользователь также принимает уведомление о том, когда начинать сеанс и когда заканчивать сеанс. Таким образом, пользователь должен лишь выполнять перемещение в ответ на уведомление для того, чтобы полностью соглашаться с направляемым сеансом очистки. Посредством избегания указаний местоположения значительно большая свобода предоставляется пользователю. Это приводит в результате к повышенному уровню согласия пользователя.
[0042] Согласно варианту осуществления, направляемый сеанс очистки делит рот, например, на шесть участков, и сеанс информирует пользователя, когда переходить от текущего участка к следующему. Как описано в данном документе, система затем пытается определить, какой участок рта был очищен в течение каждого из шести интервалов. После того как участки рта, соответствующие шести интервалам, были оценены, обратная связь о местоположении с более высоким разрешением может быть предоставлена пользователю. Может быть принято во внимание, что множество других количеств участков являются возможными.
[0043] Согласно варианту осуществления системы 300 очистки полости рта, модуль 310 формирования руководства системы 300 очистки полости рта создает одну или более инструкций очистки для пользователя перед, во время и/или после сеанса очистки. Руководящие инструкции могут быть извлечены из или основаны, например, на предварительно определенном алгоритме очистки и/или из информации об одном или более предыдущих сеансах очистки. Например, модуль 310 формирования руководства может содержать или быть на проводной и/или беспроводной связи с базой данных 312 руководств, содержащей информацию об одном или более алгоритмах очистки. Согласно варианту осуществления, руководящие инструкции содержат подсказку начала, такую как визуальная, звуковая и/или тактильная подсказка, множество подсказок перехода, информирующих пользователя о перемещении устройства от первого места во рту к новому месту во рту, и/или подсказку прекращения.
[0044] Модуль 320 датчика системы 300 очистки полости рта инструктирует или получает данные датчика от датчика 28 устройства, которое может быть, например, блоком инерциальных датчиков (IMU), состоящим из гироскопа, акселерометра и/или магнетометра. Данные датчика содержат информацию о перемещениях устройства.
[0045] Модуль 330 предварительной обработки системы 300 очистки полости рта принимает и обрабатывает данные датчика от модуля 320 датчика. Согласно варианту осуществления, предварительная обработка состоит из этапов, таких как фильтрация, чтобы уменьшать влияние сигналов возбуждения мотора на датчик движения, субдискретизация, чтобы уменьшать пропускную способность канала связи, и калибровка смещения гироскопа. Эти этапы улучшают и нормализуют полученные данные датчика.
[0046] Модуль 340 извлечения отличительного признака системы 300 очистки ротовой полости формирует один или более отличительных признаков из предварительно обработанных сигналов датчика от модуля 330 предварительной обработки и из руководящих инструкций от модуля 310 формирования руководства. Эти отличительные признаки предоставляют информацию, относящуюся к местоположению головки 16 во рту пользователя. Согласно варианту осуществления, отличительный признак может быть вычислен посредством сбора сигналов с течением времени. Например, отличительные признаки могут быть вычислены в конце сеанса очистки, в конце каждого интервала руководства, каждые x число секунд или с другими интервалами или в ответ на другие события.
[0047] Данные из типичного сеанса очистки содержат тысячи измерений датчиков. Модуль 340 извлечения отличительного признака применяет методы обработки сигнала к этим измерениям датчиков для того, чтобы получать меньшее количество значений, называемых отличительными признаками, которые содержат уместную информацию, необходимую для прогнозирования того, соглашался или нет пользователь с руководством. Эти отличительные признаки типично относятся к движениям пользователя и к ориентации устройства. Среди других признаков, модуль 340 извлечения отличительного признака может формировать следующие отличительные признаки: (i) средняя ориентация устройства; (ii) изменение ориентации устройства; (iii) энергия в сигналах от датчика 28 движения; (iv) энергия в сигналах датчика движения в каждом частотном диапазоне; (v) среднее усилие, прикладываемое к зубам; (vi) продолжительность сеанса очистки и многие другие.
[0048] Согласно варианту осуществления, первым этапом в извлечении отличительного признака является оценка ориентации устройства 10 очистки ротовой полости относительно головы пользователя. На основе сигналов от одного или более датчиков 28 возможно определять или оценивать ориентацию устройства относительно окружающего мира. Кроме того, информация об ориентации головы пользователя может быть определена или оценена из интервалов руководства, в течение которых пользователь, как ожидалось, должен выполнять очистку участков коренных зубов. В течение этих интервалов, например, среднее направление главной оси устройства выравнивается с направлением лица пользователя. Практические испытания продемонстрировали, что средняя ориентация устройство строго соответствует очищаемой области рта. Например, при очистке верхней челюсти средняя ориентация щетки направлена вверх, а при очистке нижней челюсти средняя ориентация устройства очистки полости рта направлена вниз. Аналогично, главная ось устройства очистки полости рта указывает влево (вправо), когда пользователь чистит правую (левую) сторону рта. Соотношение между средней ориентацией устройства и очищаемой областью рта может быть использовано для извлечения отличительных признаков во время каждого из множества интервалов направляемого сеанса очистки.
[0049] Модуль 350 модели поведения пользователя содержит модель, используемую для прогнозирования характера очистки пользователя. Согласно варианту осуществления, модель является статистической моделью, такой как скрытая Марковская модель, или набором ограничений для пути очистки, порядком, в котором участки рта чистятся щеткой, таким как: (i) пользователь чистит каждый участок рта точно один раз; или (ii) пользователь всегда начинает в нижнем левом квадранте, среди множества других возможных ограничений.
[0050] Согласно варианту осуществления, ожидается, что характер очистки пользователя будет следовать некоторым шаблонам, которые могут быть использованы в качестве источника информации для модуля оценки местоположения. Например, в конце спланированного по времени интервала во время направляемого сеанса очистки, пользователь более вероятно должен переходить к участку рта, соседнему с участком, который пользователь ранее чистил. Это знание может быть использовано, например, посредством требования того, что оцениваемый путь очистки должен быть из предварительно определенного набора допустимых путей. Согласно варианту осуществления, более гибкий способ смоделировать это знание возможен за счет скрытой Марковской модели, которая является статистической моделью, используемой для распознавания временной картины. Обращаясь к фиг. 4, в одном варианте осуществления существует пример скрытой Марковской модели 400, используемой для моделирования характера очистки. Каждый круг 410 в модели представляет участок рта, такой как верхний передний (UF), верхний правый (UR), нижний левый (LL) и т.д. Стрелки 420 представляют допустимые переходы, при этом каждый переход содержит ассоциированную вероятность, указывающую, как часто пользователь переходит от одного участка к другому. В дополнение к скрытой Марковской модели, множество других статистических и/или основанных на правилах моделей являются возможными.
[0051] Модуль 360 оценки местоположения системы 300 очистки ротовой полости содержит модель классификации, которая оценивает местоположение устройства очистки полости рта во рту на основе вычисленных отличительных признаков сигнала. Согласно варианту осуществления, модуль сравнивает измеренные сигналы из заданного интервала направляемого сеанса очистки с типовыми шаблонами сигнала для каждого местоположения. Результат этого сравнения используется вместе с предыдущим знанием типичного поведения пользователя, чтобы определять наиболее вероятное местоположение во рту в течение интервала.
[0052] Первым этапом в оценке является модель классификации, используемая для оценки вероятностей участков рта при наличии данных датчика. Например, при наличии набора отличительных признаков от модуля 340 извлечения отличительного признака, модель классификации оценивает местоположение устройства очистки ротовой полости во рту. Например, модель может быть гауссовыми моделями, деревьями решения, методами опорных векторов и т.д. Согласно варианту осуществления, параметры модели изучаются из обучающих данных, таких как набор помеченных экземпляров, включающих в себя данные из лабораторных испытаний, во время которых местоположение устройства очистки полости рта во рту было точно измерено. Согласно варианту осуществления, выходные данные классификатора содержат вектор вероятностей.
[0053] Вторым этапом в оценке посредством модуля 360 оценки местоположения системы 300 очистки полости рта является объединение вероятностей, сформированных на этапе классификатора с пользовательской моделью, сформированной посредством модуля 350 модели поведения. Например, если модель поведения является скрытой Марковской моделью, выходные данные классификатора могут быть рассмотрены как вероятности эмиссии, и наиболее вероятный путь может быть получен с помощью алгоритма Витерби, среди других способов. В качестве другого примера, если модель поведения содержит предварительно определенный набор допустимых путей, тогда прогнозируемый путь является действительным путем, который максимизирует произведение вероятностей участков.
[0054] Обращаясь к фиг. 5, в одном варианте осуществления, представлена таблица 500 вероятностей местоположения для рта, разделенного на шесть квадрантов. Согласно этому варианту осуществления, набор допустимых путей содержит все пути без повторов, так что каждый участок рта чистится щеткой точно один раз. Строки таблицы соответствуют каждому из шести интервалов направляемой очистки, и каждая ячейка содержит вероятность, в свою очередь, что пользователь очистил возможные шесть участков. Выделенные ячейки указывают наиболее вероятный путь согласно модели поведения, сформированной посредством модуля 350 модели поведения.
[0055] Обращаясь к фиг. 6, в одном варианте осуществления, представлена блок-схема последовательности операций способа 600 для оценки местоположения устройства ухода за полостью рта в течение направляемого сеанса очистки, содержащего множество временных интервалов. На этапе 610 предоставляется устройство 10 очистки полости рта. Альтернативно, может быть предоставлена система очистки полости рта с устройством 10 и удаленным устройством 40. Устройство или система очистки полости рта может быть любым из устройств или систем, описанных или иначе предположенных в данном документе.
[0056] На этапе 620 способа модуль 46 формирования руководства обеспечивает направляемый сеанс очистки пользователю. Направляемый сеанс очистки может быть предварительно запрограммирован и сохранен в базе данных 312 руководств, например, или может быть изученным направляемым сеансом очистки. Направляемый сеанс очистки включает в себя множество инструкций очистки для пользователя. Например, направляемый сеанс очистки может включать в себя множество временных интервалов, разделенных подсказкой для перехода из первого местоположения во рту во второе местоположение во рту. Подсказка формируется посредством компонента 48 обратной связи устройства 10 ухода за полостью рта и может быть визуальной, звуковой и/или тактильной подсказкой, среди других подсказок.
[0057] На этапе 630 способа датчик 28 устройства 10 очистки полости рта формирует данные датчика в течение одного из множества временных интервалов направляемого сеанса очистки. Данные датчика указывают позицию, перемещение, ориентацию или другой параметр или характеристику устройства очистки полости рта в этом месте в течение этого временного интервала. Данные датчика сохраняются или отправляются контроллеру 30 устройства очистки полости рта и/или контроллеру 30b удаленного устройства. Соответственно, контроллер получает данные датчика, указывающие позицию или перемещение устройства очистки полости рта.
[0058] На этапе 640 способа оценивается местоположение устройства ухода за полостью рта в течение одного или более из множества временных интервалов направляемого сеанса очистки. Согласно варианту осуществления, контроллер 30 принимает данные датчика и анализирует данные, чтобы создавать оценку местоположения устройства 10 ухода за полостью рта. Например, оценка может быть получена из модели классификации, такой как гауссова модель, дерево решений, метод опорных векторов и многие другие. Модель классификации может быть основана на изученных данных. Выходные данные классификатора могут быть, например, вектором вероятностей.
[0059] На этапе 650 способа система формирует модель, которая прогнозирует характер очистки пользователя. Согласно варианту осуществления, модель является статистической моделью, такой как скрытая Марковская модель, или набором ограничений для пути очистки щеткой, порядком, в котором участки рта чистятся щеткой, таким как: (i) пользователь чистит каждый участок рта точно один раз; или (ii) пользователь всегда начинает в нижнем левом квадранте, среди множества других возможных ограничений.
[0060] На этапе 660 способа система определяет местоположение устройства ухода за полостью рта в течение одного или более временных интервалов на основе оцененного местоположения устройства ухода за полостью рта и модели характера очистки пользователя. Согласно варианту осуществления, система объединяет оценки местоположения или вероятности, сформированные на этапе классификатора, со сформированной пользовательской моделью. Например, если модель поведения является моделью HMM, выходные данные классификатора могут быть рассмотрены как вероятности эмиссии, и наиболее вероятный путь может быть получен с помощью алгоритма Витерби, среди других способов. В качестве другого примера, если модель поведения содержит предварительно определенный набор допустимых путей, тогда прогнозируемый путь является действительным путем, который максимизирует произведение вероятностей участков.
[0061] На необязательном этапе 670 способа устройство или система предоставляет обратную связь пользователю о направляемом сеансе очистки. Например, обратная связь может быть предоставлена пользователю в реальном времени и/или иначе во время или после сеанса очистки или непосредственно перед следующим сеансом очистки. Обратная связь может содержать указание, что пользователь достаточно или недостаточно очистил рот, включающее в себя то, какие участки рта были достаточно или недостаточно очищены, на основе данных определения местоположения. Обратная связь, сформированная посредством устройства 10 очистки полости рта и/или удаленного устройства 40, может быть предоставлена пользователю любым из множества различных способов, включающих в себя визуальный, письменный, звуковой, тактильный или другие типы обратной связи.
[0062] Следует понимать, что все определения, задаваемые и используемые в данном документе, контролируются согласно словарным определениям, определениям в документах, включенных по ссылке, и/или обычному смыслу задаваемых терминов.
[0063] Неопределенные артикли "a" и "an", при использовании в подробном описании и в формуле изобретения, если явно не указано иное, должны пониматься как означающие "по меньшей мере, один".
[0064] Фраза "и/или", при использовании в подробном описании и в формуле изобретения, должна пониматься как означающая "один или оба" из элементов, сочетающихся таким образом, т.е. элементов, которые совместно присутствуют в некоторых случаях и отдельно присутствуют в других случаях. Несколько элементов, перечисленных с "и/или", должны трактоваться одинаково, т.е. "одни или более" из элементов, сочетающихся таким образом. Необязательно могут присутствовать другие элементы, отличные от элементов, конкретно идентифицированных посредством выражения "и/или", будь то связанные или несвязанные с конкретно идентифицированными элементами.
[0065] Когда используется в данном документе в спецификации и в формуле, фраза "или" должна пониматься как имеющая тот же смысл, что и "и/или", как определено выше. Например, при разделении элементов в списке "или" или "и/или" должны интерпретироваться как включающие в себя, т.е., присоединение, по меньшей мере, одного, а также включение в себя более чем одного, члена или списка элементов, и, необязательно, дополнительных неперечисленных элементов. Только выражения, явно указанные в противоположном смысле, такие как "только один из" или "именно один из", или, когда используется в формуле, "состоящий из", будут ссылаться на присоединение строго одного элемента из множества или списка элементов. В целом, термин "или", когда используется в данном документе, должен интерпретироваться только как указывающий исключительные альтернативы (т.е., "один или другой, но не оба"), когда ему предшествуют термины исключительности, такие как "любой", "один из", "только один из" или "исключительно один из".
[0066] Когда используется в данном документе в спецификации и в формуле, фраза "по меньшей мере, один", при ссылке на список из одного или более элементов, должна пониматься как означающая, по меньшей мере, один элемент, выбранный из любого одного или более элементов в списке элементов, но необязательно включающий в себя, по меньшей мере, один из каждого и каждый элемент, специально перечисленный в списке элементов, и не исключающий любые комбинации элементов в списке элементов. Это определение также обеспечивает возможность того, что необязательно могут присутствовать элементы, отличные от элементов, конкретно идентифицированных в списке элементов, к которым относится фраза "по меньшей мере, один", будь то связанные или несвязанные с конкретно идентифицированными элементами.
[0067] Также следует понимать, что, если явно не указано иное, в любых способах, заявленных в данном документе, которые включают в себя более одного этапа или действия, порядок этапов или действий способа не обязательно ограничен порядком, в котором изложены этапы или действия способа.
[0068] В формуле изобретения, также как и в спецификации выше, все переходные фразы, такие как "содержащий", "включающий в себя", "несущий", "имеющий", "вмещающий в себя", "подразумевающий", "удерживающий", "состоящий из" и т.п. должны пониматься как неограниченные, т.е., означать "включающий в себя, но не только". Только переходные фразы "состоящий из" и "состоящий в своей основе из" должны быть закрытыми или полузакрытыми переходными фразами, соответственно.
[0069] Хотя несколько изобретаемых вариантов осуществления описано и проиллюстрировано в данном документе, специалисты в данной области техники должны легко представлять себе множество других средств и/или структур для осуществления функций и/или получения результатов и/или одного или более преимуществ, описанных в данном документе, и каждое из таких изменений и/или модификаций считается в рамках объема изобретаемых вариантов осуществления, описанных в данном документе. Если обобщать, специалисты в данной области техники должны легко принимать во внимание, что все параметры, размеры, материалы и конфигурации, описанные в данном документе, имеют намерение быть примерными, и что фактические параметры, размеры, материалы и/или конфигурации зависят от конкретного варианта применения или вариантов применения, для которых используются изобретаемые идеи. Специалисты в данной области техники должны признавать или иметь возможность устанавливать с помощью не более чем обычных экспериментов множество эквивалентов для конкретных изобретаемых вариантов осуществления, описанных в данном документе. Следовательно, должно быть понятно, что вышеописанные варианты осуществления представлены только в качестве примера, и что, в рамках прилагаемой формулы изобретения и эквивалентов к ней, изобретенные варианты осуществления могут быть применены на практике иначе, чем конкретно описано и заявлено. Изобретаемые варианты осуществления настоящего раскрытия сущности направлены на каждый отдельный признак, систему, изделие, материал, комплект и/или способ, описанный в данном документе. Помимо этого, любая комбинация двух или более таких признаков, систем, изделий, материалов, комплектов и/или способов, если такие признаки, системы, изделия, материалы, комплекты и/или способы не являются взаимно несогласованными, включается в рамки изобретаемого объема настоящего раскрытия сущности.
Группа изобретений относится к системам и способам для предоставления возможности точного определения местоположения и отслеживания устройства очистки полости рта во время направляемого сеанса очистки. Устройство (10) очистки полости рта, сконфигурированное, чтобы оценивать местоположение устройства во рту пользователя во время направляемого сеанса очистки, содержащего множество временных интервалов, содержит: модуль (46) формирования руководства, сконфигурированный, чтобы обеспечивать направляемый сеанс очистки пользователю, при этом направляемый сеанс очистки содержит множество временных интервалов, разделенных подсказкой для перехода из первого местоположения во рту во второе местоположение во рту; датчик (28), сконфигурированный, чтобы формировать данные датчика в течение одного из множества временных интервалов, при этом данные датчика указывают позицию или перемещение устройства очистки; компонент (48) обратной связи, сконфигурированный, чтобы формировать подсказки. Устройство содержит контроллер (30), сконфигурированный, чтобы: (i) оценивать, на основе сформированных данных датчика, местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов; (ii) формировать модель, чтобы прогнозировать характер очистки пользователя, причем модель для прогнозирования характера очистки пользователя является статистической моделью или набором ограничений для пути очистки или порядком, в котором участки рта чистятся щеткой, (iii) определять местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов, на основе оцененного местоположения устройства ухода за полостью рта и модели прогнозирования характера очистки пользователя. В результате обеспечивается правильная очистка полости рта. 3 н. и 12 з.п. ф-лы, 6 ил.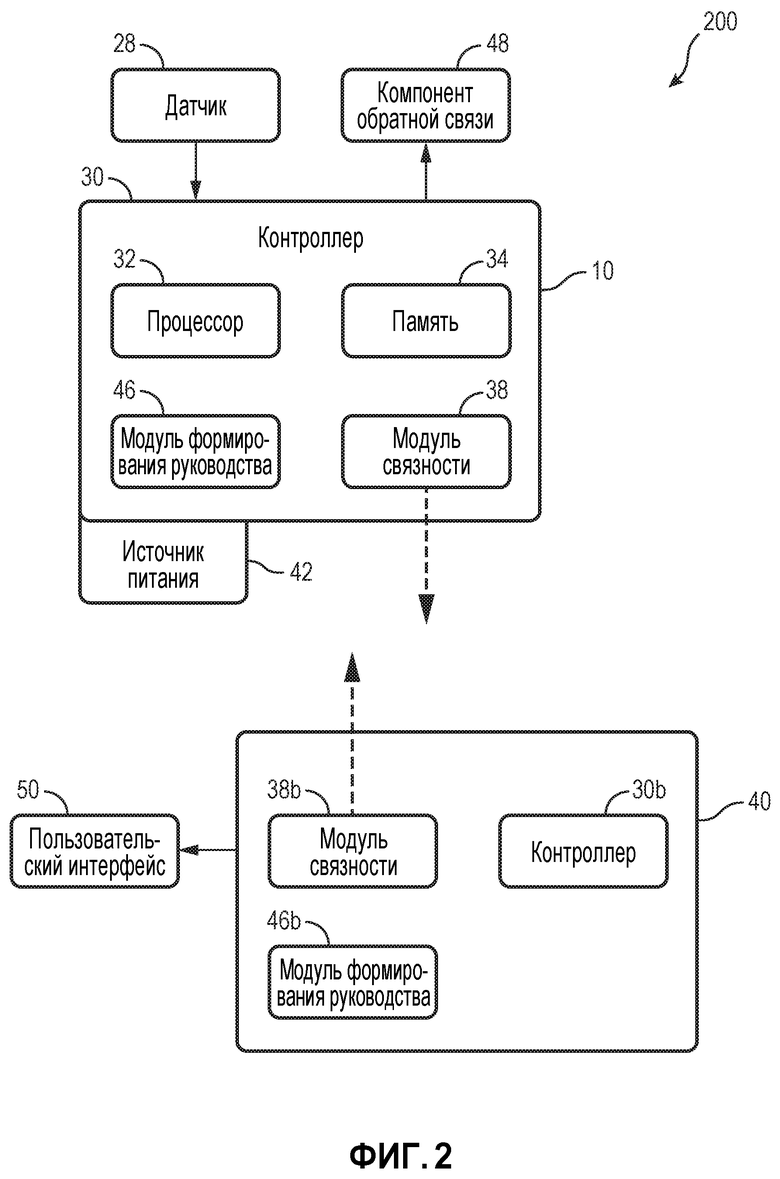
1. Устройство (10) очистки полости рта, сконфигурированное, чтобы оценивать местоположение устройства во рту пользователя во время направляемого сеанса очистки, содержащего множество временных интервалов, при этом устройство очистки полости рта содержит:
модуль (46) формирования руководства, сконфигурированный, чтобы обеспечивать направляемый сеанс очистки пользователю, при этом направляемый сеанс очистки содержит множество временных интервалов, разделенных подсказкой для перехода из первого местоположения во рту во второе местоположение во рту;
датчик (28), сконфигурированный, чтобы формировать данные датчика в течение одного из множества временных интервалов, при этом данные датчика указывают позицию или перемещение устройства очистки;
компонент (48) обратной связи, сконфигурированный, чтобы формировать подсказки;
контроллер (30), сконфигурированный, чтобы: (i) оценивать, на основе сформированных данных датчика, местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов; (ii) формировать модель, чтобы прогнозировать характер очистки пользователя, причем модель для прогнозирования характера очистки пользователя является статистической моделью или набором ограничений для пути очистки или порядком, в котором участки рта чистятся щеткой, (iii) определять местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов, на основе оцененного местоположения устройства ухода за полостью рта и модели прогнозирования характера очистки пользователя.
2. Устройство очистки по п. 1, в котором контроллер конфигурируется, чтобы предоставлять обратную связь пользователю относительно сеанса очистки.
3. Устройство очистки по п. 1, в котором оценка местоположения устройства очистки полости рта содержит оценку вероятности для каждого из множества местоположений во рту пользователя, что устройство очистки полости рта находилось в местоположении в течение одного из множества временных интервалов.
4. Устройство очистки по п. 1, в котором направляемый сеанс очистки дополнительно содержит подсказку, чтобы начинать сеанс очистки, и подсказку, чтобы заканчивать сеанс очистки.
5. Устройство очистки по п. 1, в котором подсказка является визуальной подсказкой, звуковой подсказкой или тактильной подсказкой.
6. Устройство (10) очистки полости рта, сконфигурированное, чтобы определять согласие пользователя с направляемым сеансом очистки, при этом устройство очистки полости рта содержит:
модуль (310) формирования руководства, сконфигурированный, чтобы формировать направляемый сеанс очистки рта пользователя, содержащий множество временных интервалов, разделенных подсказкой для перехода от первого местоположения во рту ко второму местоположению во рту;
модуль (320) датчика, сконфигурированный, чтобы принимать от датчика (28) данные датчика в течение одного из множества временных интервалов, при этом данные датчика указывают позицию или перемещение устройства очистки;
модуль (340) извлечения отличительного признака, сконфигурированный, чтобы извлекать один или более отличительных признаков из направляемого сеанса очистки и данных датчика;
модуль (350) модели поведения, сконфигурированный, чтобы формировать модель для прогнозирования характера очистки пользователя, причем модель для прогнозирования характера очистки пользователя является статистической моделью или набором ограничений для пути очистки или порядком, в котором участки рта чистятся щеткой,
модуль (360) оценки местоположения, сконфигурированный, чтобы:
оценивать, на основе извлеченных отличительных признаков, местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов; и
определять, на основе оцененного местоположения устройства ухода за полостью рта и модели характера очистки пользователя, местоположение устройства ухода за полостью рта в течение одного из множества временных интервалов.
7. Устройство очистки полости рта по п. 6, дополнительно содержащее базу данных (312) руководств, содержащую один или более сохраненных направляемых сеансов очистки.
8. Устройство очистки полости рта по п. 6, при этом подсказка является визуальной подсказкой, звуковой подсказкой или тактильной подсказкой.
9. Способ (600) оценки местоположения устройства (10) очистки полости рта в течение направляемого сеанса очистки, содержащего множество временных интервалов, при этом способ содержит этапы, на которых:
предоставляют (610) устройство очистки полости рта, содержащее датчик (28), модуль (46) формирования руководства, компонент (48) обратной связи и контроллер (30);
обеспечивают (620), посредством модуля формирования руководства, направляемый сеанс очистки пользователю, при этом направляемый сеанс очистки содержит множество временных интервалов, разделенных подсказкой перехода от первого местоположения во рту ко второму местоположению во рту, при этом подсказка формируется посредством компонента обратной связи;
формируют (630), в течение одного из множества временных интервалов, данные датчика от датчика, указывающие позицию или перемещение устройства очистки полости рта;
оценивают (640), посредством контроллера на основе сформированных данных датчика, местоположение устройства очистки полости рта в течение одного из множества временных интервалов;
формируют (650) модель для прогнозирования характера очистки пользователя;
причем модель для прогнозирования характера очистки пользователя является статистической моделью или набором ограничений для пути очистки или порядком, в котором участки рта чистятся щеткой;
определяют (660) местоположение устройства очистки полости рта в течение одного из множества временных интервалов, на основе оцененного местоположения устройства очистки полости рта и модели характера очистки пользователя.
10. Способ по п. 9, дополнительно содержащий этап, на котором предоставляют (670) обратную связь пользователю о сеансе очистки.
11. Способ по п. 9, в котором этап оценки содержит оценку вероятности для каждого из множества местоположений во рту пользователя, что устройство очистки полости рта находилось в местоположении в течение одного из множества временных интервалов.
12. Способ по п. 11, в котором этап оценки содержит набор правил.
13. Способ по п. 9, в котором направляемый сеанс очистки дополнительно содержит подсказку, чтобы начинать сеанс очистки, и подсказку, чтобы заканчивать сеанс очистки.
14. Способ по п. 9, в котором направляемый сеанс очистки содержит только подсказки.
15. Способ по п. 9, в котором подсказка является визуальной подсказкой, звуковой подсказкой или тактильной подсказкой.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ЗУБНАЯ ЩЕТКА С ОТСЛЕЖИВАНИЕМ ПОЛОЖЕНИЯ | 2010 |
|
RU2552992C2 |

