Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к системе представления информации, которая представляет информацию относительно видеозаписи (видеоизображения) рядом с транспортным средством.
Уровень техники
[0002] Относительно этого вида устройства, известно устройство помощи при вождении, которое отображает видеозапись, захваченную позади транспортного средства, когда рычаг переключения передач транспортного средства переводится в позицию заднего хода (патентный документ 1).
Документы уровня техники
Патентные документы
[0003] Патентный документ 1. JP2012-0162130A
Сущность изобретения
Проблемы, решаемые изобретением
[0004] Тем не менее, когда портативное терминальное устройство, которое не включено в бортовое устройство, получает, через беспроводную связь, изображение, захваченное посредством бортовой камеры, и представляет захваченное изображение, задержка в беспроводной связи может вызывать проблему в том, что время представления захваченного изображения становится задержанным.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы обеспечивать возможность терминальному устройству надлежащим образом представлять информацию изображений, которая представляет состояние в реальном времени рядом с транспортным средством, даже когда задержка возникает в беспроводной связи между бортовым устройством и терминальным устройством.
Средство решения проблем
[0006] Настоящее изобретение разрешает вышеуказанную проблему таким способом, как пояснено ниже. Когда беспроводная связь не задерживается, маркер расстояния, который представляет расстояние от транспортного средства, накладывается на изображение в исходной позиции, в которой расстояние от транспортного средства представляет собой расстояние, представленное посредством маркера расстояния. Когда беспроводная связь задерживается, маркер расстояния накладывается на изображение в позиции на стороне направления движения транспортного средства относительно исходной позиции или в позиции на стороне транспортного средства относительно исходной позиции.
Преимущества изобретения
[0007] Согласно настоящему изобретению, когда беспроводная связь задерживается, маркер расстояния накладывается в позиции на стороне направления движения транспортного средства относительно исходной позиции или в позиции на стороне транспортного средства относительно исходной позиции. Водителю может в силу этого обеспечиваться возможность распознавать состояние в реальном времени рядом с транспортным средством, даже когда беспроводная связь задерживается между бортовым устройством и терминальным устройством.
Краткое описание чертежей
[0008] Фиг. 1 является блок-схемой системы представления информации согласно варианту осуществления настоящего изобретения.
Фиг. 2 является видом, иллюстрирующим пример изображения, отображаемого на дисплее терминального устройства по фиг. 1.
Фиг. 3 является диаграммой для описания задержки в беспроводной связи.
Фиг. 4 является видом для описания способа наложения направляющих линий согласно первому варианту осуществления настоящего изобретения.
Фиг. 5 является видом для описания способа наложения направляющих линий согласно первому варианту осуществления настоящего изобретения.
Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей процесс представления информации согласно первому варианту осуществления настоящего изобретения.
Фиг. 7 является видом для описания способа наложения направляющих линий, когда движущихся объектов не существует рядом с рассматриваемым транспортным средством, или движущийся объект существует в пределах диапазона направляющих линий во втором варианте осуществления настоящего изобретения.
Фиг. 8 является видом для описания способа наложения направляющих линий, когда движущихся объектов не существует рядом с рассматриваемым транспортным средством, или движущийся объект существует в пределах диапазона направляющих линий во втором варианте осуществления настоящего изобретения.
Фиг. 9 является видом для описания способа наложения направляющих линий, когда движущийся объект существует за пределами диапазона направляющих линий во втором варианте осуществления настоящего изобретения.
Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей процесс представления информации согласно второму варианту осуществления настоящего изобретения.
Фиг. 11 является видом для описания режима отображения для направляющих линий в третьем варианте осуществления настоящего изобретения, когда беспроводная связь находится в нормальном состоянии задержки.
Фиг. 12 является видом для описания режима отображения для направляющих линий в третьем варианте осуществления настоящего изобретения, когда беспроводная связь находится в анормальном состоянии задержки.
Фиг. 13 является видом для описания режима отображения для направляющих линий в третьем варианте осуществления настоящего изобретения, когда беспроводная связь находится в состоянии прерывания связи.
Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей процесс представления информации согласно третьему варианту осуществления настоящего изобретения.
Вариант(ы) осуществления изобретения
[0009] Далее описываются варианты осуществления настоящего изобретения со ссылкой на чертежи. Ниже описываются варианты осуществления посредством примерной иллюстрации случая, в котором настоящее изобретение применяется к системе 1000 представления информации, содержащей бортовое устройство 200, которое имеет одну или более камер, предоставленных на транспортном средстве, и портативное терминальное устройство 100, которое поддерживает беспроводную связь с бортовым устройством 200.
[0010] Первый вариант осуществления
Фиг. 1 является блок-схемой системы 1000 представления информации согласно настоящему варианту осуществления. Система 1000 представления информации содержит бортовое устройство 200 и терминальное устройство 100.
[0011] Во-первых, описывается бортовое устройство 200 настоящего варианта осуществления со ссылкой на фиг. 1. Бортовое устройство 200 содержит одну или более камер 1a-1d, устройство 2 связи, контроллер 3 транспортного средства и различные типы устройств 4, оборудованных на транспортном средстве (также называемые "модулями 4" как собирательный термин).
[0012] Одна или более камер 1a-1d (также здесь и в дальнейшем называемых "камерой 1" или "камерам 1" как собирательный термин) сконфигурированы с использованием элементов формирования изображений, таких как приборы с зарядовой связью (CCD). В настоящем варианте осуществления, эти камеры включают в себя камеру 1, которая располагается в предварительно определенной позиции заднего участка (сзади) транспортного средства, такого как участок задней накладки и участок спойлера на крыше кабины. Эта камера 1 захватывает изображения объекта или поверхности дороги, которая существует в пространстве позади транспортного средства (изображения заднего вида или вида сзади). Термин "позади транспортного средства" при использовании в данном документе охватывает не только значение "непосредственно позади транспортного средства", но также и значение "назад и вправо по диагонали от транспортного средства" и "назад и влево по диагонали от транспортного средства". В частности, бортовое устройство 200 настоящего варианта осуществления включает в себя множество камер 1a-1d, которые располагаются в различных позициях за пределами транспортного средства. Более конкретно, бортовое устройство 200 настоящего варианта осуществления включает в себя камеры 1a-1d, которые предоставляются в предварительно определенной передней позиции транспортного средства, такой как участок решетки радиатора, в предварительно определенной левосторонней позиции транспортного средства, такой как участок левого бокового зеркала, или в предварительно определенной правосторонней позиции транспортного средства, такой как участок правого бокового зеркала. Каждая камера 1 захватывает видеозапись в различном направлении рядом с транспортным средством. В настоящем варианте осуществления, широкоугольные камеры, допускающие формирование изображений широкоугольных изображений, используются в качестве камер 1.
[0013] Бортовое устройство 200 передает изображения, захваченные посредством камер 1, в терминальное устройство 100, которое описывается ниже. В альтернативном варианте осуществления, по меньшей мере, одна из камер 1 может иметь функцию беспроводной связи, чтобы передавать захваченные изображения наружу. Терминальное устройство 100 получает изображения, захваченные посредством камер 1, через сеть беспроводной связи. Изображению, захваченному посредством каждой камеры 1, назначается идентификатор, соответствующий местоположению (адресу) камеры 1, и терминальное устройство 100 может идентифицировать каждое из изображений, захваченных посредством камеры 1, на основе идентификатора. Изображение, захваченное посредством каждой камеры 1, записывается со временем захвата изображения, и терминальное устройство 100 может воспринимать время захвата каждого из изображений, захваченных посредством камеры 1.
[0014] Контроллер 3 транспортного средства получает информацию из каждого модуля транспортного средства и всесторонне управляет работой транспортного средства. Контроллер 3 транспортного средства настоящего варианта осуществления получает информацию состояния, которая представляет состояние транспортного средства. Контроллер 3 транспортного средства получает информацию руления из устройства 41 рулевого управления транспортного средства в качестве информации состояния, получает информацию ускорения или информацию скорости из датчика 42 ускорения в качестве информации состояния и получает информацию позиций переключения коробки передач трансмиссии 44 транспортного средства в качестве информации состояния. Контроллер 3 транспортного средства передает полученную информацию руления и/или информацию ускорения (или информацию скорости) в терминальное устройство 100. Терминальное устройство 100 включает в себя устройство 10 управления, которое получает направление движения (угол движения) транспортного средства из информации руления. Устройство 10 управления также получает направление движения, которое представляет то, транспортное средство движется передним или задним ходом, из информации позиций переключения коробки передач. Устройство 10 управления дополнительно получает величину движения транспортного средства из информации ускорения (или информации скорости) и времени движения. Таким образом, устройство 10 управления может получать позицию транспортного средства после того, как проходит предварительно определенное время, из направления движения и величины движения транспортного средства.
[0015] Камеры 1, устройство 2 связи, контроллер 3 транспортного средства и модули 4 бортового устройства 200 соединяются между собой через контроллерную сеть (CAN) или другую бортовую LAN и могут взаимно обмениваться информацией.
[0016] Далее описывается терминальное устройство 100 со ссылкой на фиг. 1. Терминальное устройство 100 настоящего варианта осуществления представляет собой портативное терминальное устройство, такое как смартфон и планшетный компьютер, который имеет функцию связи. Терминальное устройство 100 настоящего варианта осуществления содержит устройство 10 управления, устройство 20 связи и дисплей 30.
[0017] Устройство 20 связи настоящего варианта осуществления обменивается информацией взаимно с устройством 2 связи бортового устройства 200, отделенного от терминального устройства 100. Устройство 20 связи получает захваченные изображения, информацию относительно состояния транспортного средства и другую информацию из бортового устройства 200.
[0018] Дисплей 30 настоящего варианта осуществления отображает изображения, захваченные посредством камер 1, и информацию относительно состояния задержки беспроводной связи. Фиг. 2 является видом, иллюстрирующим пример изображения, отображаемого на дисплее 30 терминального устройства 100. В частности, фиг. 2 иллюстрирует изображение (изображение вида сзади), в котором объект и поверхность дороги, существующая в пространстве позади транспортного средства, формируются в изображение посредством камеры 1, которая располагается в предварительно определенной позиции заднего участка (сзади) транспортного средства (то же применимо к фиг. 5, 7, 9 и 11-13).
[0019] Как проиллюстрировано на фиг. 2, изображение, отображаемое на дисплее 30, отображается вместе с направляющими линиями, которые располагаются вдоль траектории, по которой прогнозируется движение рассматриваемого транспортного средства. Например, направляющие линии отображаются таким образом, что они накладываются на изображение. Направляющие линии, накладываемые на изображение, включают в себя направляющие линии Q1 ширины транспортного средства и направляющие линии Q2 расстояния. Каждая направляющая линия Q2 расстояния представляет собой направляющую линию, которая представляет расстояние от рассматриваемого транспортного средства (камеры 1). В настоящем варианте осуществления, направляющие линии Q2 расстояния накладываются в позициях в 0,5 м, 1,0 м, 2,0 м и в 3,0 м от рассматриваемого транспортного средства. Расстояния, представленные посредством направляющих линий Q2 расстояния, не ограничены 0,5 м, 1,0 м, 2,0 м и 3,0 м и могут надлежащим образом задаваться. В одном или более вариантов осуществления настоящего изобретения, терминальное устройство 100 может быть размещено в держателе, присоединяемом к приборной панели, или около системы рулевого управления транспортного средства, так что водитель транспортного средства может легко распознавать терминальное устройство 100.
[0020] Устройство 10 управления терминального устройства 100 настоящего варианта осуществления содержит постоянное запоминающее устройство 12 (ROM), которое сохраняет программу для наложения направляющих линий на изображение, захваченное посредством камеры 1, и отображения их на дисплее 30, центральный процессор 11 (CPU) в качестве функциональной схемы, которая выполняет программу, сохраненную в ROM 12, чтобы за счет этого выступать в качестве терминального устройства 100 настоящего варианта осуществления, и оперативное запоминающее устройство 13 (RAM), которое выступает в качестве доступного устройства хранения данных.
[0021] Устройство 10 управления терминального устройства 100 настоящего варианта осуществления имеет функцию получения изображений получения изображений, захваченных посредством камер 1, функцию определения состояния задержки для определения состояния задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200, функцию наложения направляющих линий для наложения направляющих линий на изображение, захваченное посредством камеры 1, и функцию представления информации отображения изображения, на которое накладываются направляющие линии, на дисплее. Устройство 10 управления представляет собой компьютер, который выполняет вышеуказанные функции посредством взаимодействия программного обеспечения для осуществления каждой функции и вышеописанных аппаратных средств. Ниже описывается каждая функция, осуществляемая посредством устройства 10 управления.
[0022] Устройство 10 управления использует функцию получения изображений для того, чтобы получать одно или более изображений рядом с транспортным средством, захваченных посредством бортовых камер 1, из бортового устройства 200 через устройство 20 связи. В настоящем варианте осуществления, устройство 10 управления получает одно или более изображений вида сзади позади транспортного средства, но настоящее изобретение не ограничено этим. Помимо этого или альтернативно, устройство 10 управления может получать одно или более изображений вида спереди или изображений вида сбоку. В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления может получать изображение для мониторинга рядом с рассматриваемым транспортным средством, которое формируется посредством бортового устройства 200, при этом рассматриваемое транспортное средство просматривается из виртуальной точки обзора выше транспортного средства. Изображение для мониторинга представляет собой снятое сверху изображение, сформированное посредством проецирования множества изображений, которые захватываются посредством камер 1, расположенных в различных позициях на рассматриваемом транспортном средстве, на плоскость проецирования, в которой рассматриваемое транспортное средство просматривается из виртуальной точки обзора выше транспортного средства. Устройство 10 управления использует полученные захваченные изображения и/или изображение для мониторинга в качестве информации, которая должна представляться на дисплее 30 в конкретной ситуации, к примеру, при парковке рассматриваемого транспортного средства и переходе на задний ход рассматриваемого транспортного средства.
[0023] Устройство 10 управления использует функцию определения состояния задержки для того, чтобы определять состояние задержки беспроводной связи между бортовым устройством 200 и терминальным устройством 100. Состояние задержки беспроводной связи включает в себя время задержки беспроводной связи. Например, устройство 10 управления использует функцию определения состояния задержки для того, чтобы получать разность между временем захвата изображения, добавляемым в изображение, полученное из бортового устройства 200, и временем получения изображения, в качестве времени задержки. В одном или более вариантов осуществления настоящего изобретения, устройство 10 управления может использовать функцию определения состояния задержки для того, чтобы определять то, что состояние задержки беспроводной связи находится в состоянии прерывания связи, когда беспроводная связь не может устанавливаться между терминальным устройством 100 и бортовым устройством 200.
[0024] Устройство 10 управления также может использовать функцию определения состояния задержки для того, чтобы получать время задержки из разности между опорным временем на осуществление связи в предварительно определенном хорошем окружении связи и фактически измеренным временем на осуществление связи в окружении связи, в котором передача и прием фактически выполняются. Хотя не ограничено конкретным образом, устройство 10 управления может использовать функцию определения состояния задержки для того, чтобы вычислять время задержки посредством обращения к тактовому генератору 45 бортового устройства 200 и тактовому генератору 112 терминального устройства 100, чтобы синхронизировать их между собой, и затем измерения фактического времени на осуществление связи, требуемого для получения информации для обмена между бортовым устройством 200 и терминальным устройством 100 через беспроводную связь. В частности, бортовое устройство 200 передает информацию, в которую добавляется временной интервал передачи, в терминальное устройство 100. При получении информации, терминальное устройство 100 возвращает информацию подтверждения приема в бортовое устройство 200. Бортовое устройство 200 вычисляет половину времени от временного интервала передачи при передаче информации в терминальное устройство 100 до временного интервала приема при приеме информации подтверждения приема, передаваемой из терминального устройства 100, в качестве времени на осуществление связи, требуемого для беспроводной связи. Аналогично, опорное время на осуществление связи может вычисляться как время на осуществление связи для беспроводной связи в предварительно определенном окружении связи без нагрузки на линии связи. Фактически измеренное время на осуществление связи варьируется в зависимости от текущего момента времени в соответствии с различными факторами, такими как число терминальных устройств, осуществляющих доступ к линейной сети беспроводной связи, и объем информации, подлежащей обмену. Устройство 10 управления в силу этого использует функцию определения состояния задержки для того, чтобы получать время на осуществление связи с предварительно определенным периодом, и непрерывно вычисляет время задержки, которое является разностью относительно опорного времени на осуществление связи. Согласно настоящему варианту осуществления, точное время задержки может вычисляться, поскольку время задержки вычисляется после предварительной синхронизации бортового устройства 200 и терминального устройства 100 между собой.
[0025] Время задержки включает в себя постоянное время, которое предварительно определяется в соответствии с характеристикой инфраструктурных средств связи, и переменное время, которое вызывается посредством различных факторов, таких как объем услуг связи. Постоянное время может предварительно сохраняться в бортовом устройстве 200 или терминальном устройстве 100. С учетом снижения нагрузки по обработке, сохраненное обычное время задержки может считываться, чтобы определять состояние задержки.
[0026] Причины возникновения состояния задержки в представлении изображения, захваченного посредством камер 1, представляют собой не только вышеописанное время задержки беспроводной связи. Причины состояния задержки включают в себя, как проиллюстрировано на фиг. 3, первый-третий периоды времени, как описано ниже, которые требуются для того, чтобы завершать некоторые процессы от процесса захвата изображений до процесса представления изображений. Первый период времени, как упомянуто в данном документе, является временем t0-t1, в течение которого бортовое устройство 200 выполняет процесс для того, чтобы захватывать изображение рядом с транспортным средством, и процесс для того, чтобы сжимать изображение. Второй период времени является временем t1-t2, которое требуется для беспроводной связи. Третий период времени является временем t2-t3, которое требуется для процесса для того, чтобы распаковывать сжатое изображение, и процесса для того, чтобы представлять распакованное изображение на дисплее 30. Таким образом, состояние задержки беспроводной связи возникает, когда длительный период времени отнимается для процессов, выполняемых на стороне бортового устройства 200, от времени захвата изображения до времени передачи изображения для связи между бортовым устройством 200 и терминальным устройством 100, и/или для процессов, выполняемых на стороне терминального устройства 100 от времени приема изображения до времени представления изображения.
[0027] Согласно технологии связи на момент подачи настоящей заявки, когда задержка не возникает в беспроводной связи, время, требуемое для того, чтобы завершать процесс представления для изображения после процесса захвата изображений, составляет приблизительно 100-500 миллисекунд. Даже в течение такого короткого периода времени, не предпочтительно, если информация предыдущего изображения представляется, как если она является информацией изображений, захватываемой в реальном времени. В частности, нежелательно, если задержка на связь возникает таким образом, что продлевается время от захвата изображений до представления изображений. Когда изображение передается и принимается с использованием сети внутренней связи (такой как CAN) в бортовом устройстве 200, время от захвата изображений до представления изображений является практически постоянным и в силу этого может управляться равномерно. Напротив, когда изображение, полученное на стороне бортового устройства 200, передается в терминальное устройство 100 через общедоступную беспроводную связь и представляется с использованием дисплея 30 терминального устройства 100, возможно, следует учитывать задержку. Помимо этого, вышеописанный третий период времени сильно зависит от способности к обработке терминального устройства 100, и в силу этого затруднительно равномерно задавать время задержки для терминального устройства 100, которое имеет индивидуального и личного владельца и имеет различные рабочие характеристики и состояние.
[0028] Относительно вышеописанного второго периода времени, устройство 10 управления использует функцию определения состояния задержки для того, чтобы измерять время задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200 с использованием вышеописанной схемы.
[0029] Относительно вышеописанного третьего периода времени, устройство 10 управления использует функцию определения состояния задержки для получения времени обработки на стороне терминального устройства, требуемого для терминального устройства 100 для того, чтобы представлять изображение после получения изображения, суммирования времени обработки на стороне терминального устройства со временем задержки беспроводной связи, чтобы вычислять время задержки в представлении информации, и определения состояния задержки. Хотя не ограничено конкретным образом, предпочтительно, чтобы время обработки на стороне терминального устройства экспериментально вычислялось заранее и сохранялось в терминальном устройстве 100 считываемым способом. Состояние задержки может корректно определяться посредством не только вычисления задержки беспроводной связи, но также и вычисления времени задержки через суммирование времени, требуемого для процессов на стороне терминального устройства 100.
[0030] Относительно вышеописанного первого периода времени, устройство 10 управления может использовать функцию определения состояния задержки для того, чтобы суммировать, со временем задержки, время, требуемое для процессов, выполняемых на стороне бортового устройства 200, от времени получения изображения (захвата изображения) до времени передачи изображения. Состояние задержки может дополнительно корректно определяться посредством не только вычисления задержки беспроводной связи, но также и вычисления времени задержки через суммирование времени, требуемого для процессов на стороне бортового устройства 200.
[0031] Устройство 10 управления может использовать функцию определения состояния задержки для того, чтобы определять то, прерывается или нет беспроводная связь с устройством 2 связи. Когда беспроводная связь прерывается, дисплей 30 может управляться таким образом, чтобы представлять то, что беспроводная связь прерывается. В ситуации, в которой беспроводная связь с устройством 2 связи прерывается, затруднительно получать захваченное изображение в настоящий момент в реальном времени. Другими словами, имеется очень высокая вероятность того, что захваченное изображение, представленное на дисплее 30, инициировано из предыдущей видеозаписи. Согласно настоящему варианту осуществления, посредством представления того, что беспроводная связь с устройством 2 связи прерывается, можно информировать водителя в отношении того, что представленное захваченное изображение не представляет собой изображение в реальном времени.
[0032] Устройство 10 управления может использовать функцию определения состояния задержки для того, чтобы определять степень надежности беспроводной связи в соответствии с состоянием задержки. Когда время задержки является длительным, и состояние задержки беспроводной связи является плохим, выполняется определение в отношении того, что степень надежности беспроводной связи является низкой. С другой стороны, когда время задержки является коротким, и состояние задержки беспроводной связи не является плохим (состояние связи является хорошим), выполняется определение в отношении того, что степень надежности беспроводной связи является высокой. Степень надежности беспроводной связи может задаваться в соответствии со временем на осуществление связи в состоянии связи. По мере того, как время на осуществление связи является более длительным, степень надежности беспроводной связи может задаваться более низкой. Устройство 10 управления управляет дисплеем 30 с возможностью представлять определенную степень надежности. В ситуации, в которой время задержки беспроводной связи является длительным, и степень надежности беспроводной связи является низкой, затруднительно получать захваченное изображение в настоящий момент в реальном времени. Другими словами, имеется очень высокая вероятность того, что захваченное изображение, представленное на дисплее 30, инициировано из предыдущей видеозаписи. Согласно настоящему варианту осуществления, посредством представления того, что степень надежности беспроводной связи с устройством 2 связи является низкой, можно информировать водителя в отношении того, что представленное захваченное изображение не представляет собой изображение в реальном времени.
[0033] Устройство 10 управления использует функцию наложения направляющих линий для того, чтобы формировать направляющие линии. Направляющие линии включают в себя направляющие линии Q1 ширины транспортного средства, которые представляют позиции боковых поверхностей рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется, и направляющие линии Q2 расстояния, которые представляют позиции вдоль направления движения рассматриваемого транспортного средства, когда рассматриваемое транспортное средство движется. Затем устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать сформированные направляющие линии таким образом, что, как проиллюстрировано на фиг. 2, направляющие линии накладываются на изображение, захваченное посредством камеры 1. Когда беспроводная связь между терминальным устройством 100 и бортовым устройством 200 не задерживается, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы накладывать каждую направляющую линию Q2 расстояния в позиции, в которой расстояние от рассматриваемого транспортного средства представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния.
[0034] С другой стороны, когда беспроводная связь между терминальным устройством 100 и бортовым устройством 200 задерживается, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять позиции наложения направляющих линий на изображение на основе состояния задержки беспроводной связи и состояния рассматриваемого транспортного средства, полученных из контроллера 3 транспортного средства. Ниже описывается способ наложения направляющих линий согласно первому варианту осуществления настоящего изобретения со ссылкой на фиг. 4 и фиг. 5. Фиг. 4 и фиг. 5 являются видами для описания способа наложения направляющих линий в первом варианте осуществления настоящего изобретения. Фиг. 4 и фиг. 5 иллюстрируют примерное окружение, в котором рассматриваемое транспортное средство движется задним ходом, чтобы въезжать на место для парковки. Нижеприведенное описание приводится при условии, что позиция в изображении, в которой расстояние от рассматриваемого транспортного средства (камеры 1) представляет собой расстояние, представленное посредством каждой направляющей линии Q2 расстояния, представляет собой исходную позицию Q2' для направляющей линии Q2 расстояния.
[0035] Когда беспроводная связь между терминальным устройством 100 и бортовым устройством 200 задерживается, позиция транспортного средства, в которой захватывается изображение, представляет позицию во время задержки раньше, которая отличается от текущей позиции рассматриваемого транспортного средства. Например, в окружении, проиллюстрированном на фиг. 4, предполагается, что изображение, проиллюстрированное на фиг. 5, захватывается во время t10. Тем не менее, в примере, проиллюстрированном на фиг. 4, изображение, захваченное во время t10, отображается на дисплее 30 терминального устройства 100 во время t11, поскольку беспроводная связь задерживается. В силу этого, во время t11 фактическая позиция рассматриваемого транспортного средства представляет позицию P1 на стороне направления движения транспортного средства относительно позиции P0, в которой захватывается изображение, отображаемое на дисплее 30.
[0036] Как проиллюстрировано на фиг. 4, когда помеха O (такая как стенка) существует в позиции P2 на стороне направления движения рассматриваемого транспортного средства, и беспроводная связь задерживается, расстояние d2 от фактической позиции P1 рассматриваемого транспортного средства до помехи O во время t11 меньше расстояния d1 от позиции P0, в которой изображение, отображаемое на дисплее 30, захватывается, до помехи O. Таким образом, когда беспроводная связь задерживается, рассматриваемое транспортное средство находится ближе к помехе O относительно позиции, в которой захватывается изображение, отображаемое на дисплее 30. Следовательно, когда беспроводная связь задерживается, чтобы обеспечивать возможность водителю распознавать то, что рассматриваемое транспортное средство находится ближе к помехе O относительно случая отсутствия задержки беспроводной связи, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается на изображение в позиции на стороне рассматриваемого транспортного средства (противоположной стороне по отношению к направлению движения рассматриваемого транспортного средства) относительно исходной позиции Q2', в которой расстояние от рассматриваемого транспортного средства (камеры 1) представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния. В настоящем варианте осуществления, направляющие линии включают в себя множество направляющих линий Q2 расстояния, и каждая направляющая линия Q2 расстояния в силу этого отображается таким образом, что направляющая линия Q2 расстояния накладывается в позиции на стороне рассматриваемого транспортного средства относительно исходной позиции Q2' для направляющей линии Q2 расстояния.
[0037] Например, в примере, проиллюстрированном на фиг. 4, предполагается, что P3 представляет исходную позицию Q2' (например, позицию, которая представляет расстояние в 1,0 м от рассматриваемого транспортного средства) для направляющей линии Q2 расстояния в изображении, захваченном во время t10. В этом случае, изображение, захваченное во время t10, отображается во время t11, и в силу этого позиция в изображении, в котором расстояние от рассматриваемого транспортного средства представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния, представляет позицию P3. Тем не менее, в таком случае, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается в позиции P4 на стороне рассматриваемого транспортного средства относительно позиции P3. Это обеспечивает возможность позиции P4, в которой направляющая линия Q2 расстояния накладывается и отображается в изображении, отображаемом посредством дисплея 30, представлять собой позицию ближе к рассматриваемому транспортному средству относительно позиции P3, которая представляет собой исходную позицию Q2'. Таким образом, в настоящем варианте осуществления, направляющая линия Q2 расстояния становится ближе к рассматриваемому транспортному средству в изображении, как проиллюстрировано на фиг. 5, на расстояние, на которое рассматриваемое транспортное средство фактически движется относительно позиции захвата изображений. Посредством этой операции, расстояние, представленное посредством направляющей линии Q2 расстояния (например, в 1,0 м от рассматриваемого транспортного средства), не изменяется, но водитель может распознавать расстояние от рассматриваемого транспортного средства до позиции, представленной посредством направляющей линии Q2 расстояния (например, расстояние в 1,0 м от рассматриваемого транспортного средства), как если расстояние относительно сокращается по сравнению со случаем, в котором направляющая линия Q2 расстояния накладывается в исходной позиции Q2' и отображается. Следовательно, когда помеха O существует в направлении движения рассматриваемого транспортного средства, например, водитель может распознавать расстояние от рассматриваемого транспортного средства до помехи O, как если расстояние является относительно коротким расстоянием.
[0038] Когда беспроводная связь задерживается, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы оценивать величину движения от позиции, в которой захватывается изображение, до текущей позиции рассматриваемого транспортного средства на основе информации состояния, такой как скорость транспортного средства и информация руления рассматриваемого транспортного средства и время задержки беспроводной связи. Каждая направляющая линия Q2 расстояния в силу этого отображается таким образом, что направляющая линия Q2 расстояния накладывается в позиции на стороне рассматриваемого транспортного средства относительно исходной позиции Q2' на величину, соответствующую оцененной величине движения. Например, в примере, проиллюстрированном на фиг. 4, устройство 10 управления использует функцию наложения направляющих линий, во время t11, чтобы оценивать величину движения от позиции P0, в которой захватывается изображение, до текущей позиции P1 рассматриваемого транспортного средства. Затем устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается в позиции P4, которая сдвигается от исходной позиции Q2' к стороне рассматриваемого транспортного средства на величину, соответствующую оцененной величине движения. В альтернативном варианте осуществления, устройство 10 управления может использовать функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается в позиции на стороне рассматриваемого транспортного средства относительно исходной позиции Q2' на предварительно определенную величину движения.
[0039] Как проиллюстрировано на фиг. 5, например, устройство 10 управления использует функцию представления информации для того, чтобы управлять дисплеем 30 с возможностью отображать изображение, на которое накладываются направляющие линии, с использованием функции наложения направляющих линий. Фиг. 5 иллюстрирует исходные позиции Q2' в описательных целях, но когда изображение отображается на дисплее 30, исходные позиции Q2' не отображаются (то же применимо к фиг. 7 и 9, которые описываются ниже).
[0040] Далее описывается процесс представления информации согласно первому варианту осуществления. Фиг. 6 является блок-схемой последовательности операций способа, иллюстрирующей процесс представления информации согласно первому варианту осуществления. Процесс представления информации, проиллюстрированный на фиг. 6, выполняется посредством устройства 10 управления терминального устройства 100.
[0041] На этапе S101, устройство 10 управления использует функцию определения состояния задержки для того, чтобы выполнять определение в отношении состояния задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200. В частности, устройство 10 управления использует функцию определения состояния задержки для того, чтобы определять то, устанавливается или нет беспроводная связь между терминальным устройством 100 и бортовым устройством 200, и когда беспроводная связь устанавливается, определять время задержки беспроводной связи. В одном или более вариантов осуществления настоящего изобретения, когда беспроводная связь не устанавливается (когда беспроводная связь прерывается), устройство 10 управления может использовать функцию представления информации для того, чтобы отображать этот факт на дисплее 30.
[0042] На этапе S102, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы получать информацию состояния рассматриваемого транспортного средства. Например, устройство 10 управления может использовать функцию наложения направляющих линий для того, чтобы получать информацию состояния, такую как скорость, ускорение транспортного средства, угол поворота при рулении и направление движения рассматриваемого транспортного средства, из контроллера 3 транспортного средства.
[0043] На этапе S103, устройство 10 управления использует функцию получения изображений для того, чтобы получать изображение рядом с рассматриваемым транспортным средством, захваченное посредством камеры 1. Затем на этапе S104, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, задерживается или нет беспроводная связь между терминальным устройством 100 и бортовым устройством 200, на основе результата определения на этапе S101 состояния задержки беспроводной связи. Когда беспроводная связь задерживается, процедура переходит к этапу S105, тогда как когда беспроводная связь не задерживается, процедура переходит к этапу S106. В одном или более вариантов осуществления настоящего изобретения, когда беспроводная связь просто задерживается на определенный период времени (например, 200 мс) или меньше, может выполняться определение в отношении того, что беспроводная связь не задерживается, и процедура может переходить к этапу S106.
[0044] На этапе S106, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы выполнять процесс наложения направляющих линий на изображение, полученное на этапе S103. Уже выполнено определение в отношении того, что беспроводная связь не задерживается, и в силу этого на этапе S106, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния, которая представляет расстояние от рассматриваемого транспортного средства, таким образом, что направляющая линия Q2 расстояния накладывается в позиции (исходной позиции Q2'), в которой расстояние от рассматриваемого транспортного средства представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния.
[0045] Когда на этапе S104 выполняется определение в отношении того, что беспроводная связь задерживается, процедура переходит к этапу S105. На этапе S105, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается на изображение в позиции на стороне рассматриваемого транспортного средства (противоположной стороне по отношению к направлению движения рассматриваемого транспортного средства) относительно исходной позиции Q2', в которой расстояние от рассматриваемого транспортного средства представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния. Например, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы оценивать величину движения от позиции, в которой захватывается изображение, до текущей позиции рассматриваемого транспортного средства на основе результата определения на этапе S101 состояния задержки беспроводной связи и состояния (например, скорости транспортного средства и угол поворота при рулении) рассматриваемого транспортного средства, полученного на этапе S102, и отображать каждую направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается в позиции, которая сдвигается от исходной позиции Q2' к стороне рассматриваемого транспортного средства на величину, соответствующую оцененной величине движения.
[0046] Затем на этапе S107, устройство 10 управления использует функцию представления информации для того, чтобы представлять изображение, на которое накладываются направляющие линии на этапе S105 или этапе S106, на экране дисплея 30.
[0047] Как описано выше, система 1000 представления информации согласно первому варианту осуществления определяет позиции для наложения направляющих линий Q2 расстояния на изображение, захваченное посредством камеры 1, на основе состояния задержки беспроводной связи. Это обеспечивает возможность водителю распознавать состояние в реальном времени рядом с транспортным средством в изображении, даже когда беспроводная связь между терминальным устройством 100 и бортовым устройством 200 задерживается.
[0048] Это описывается подробнее. В настоящем варианте осуществления, когда беспроводная связь задерживается, все направляющие линии Q2 расстояния накладываются на изображение, как проиллюстрировано на фиг. 5, в позиции на стороне рассматриваемого транспортного средства (противоположной стороне по отношению к направлению движения рассматриваемого транспортного средства) относительно исходной позиции Q2', в которой расстояние от рассматриваемого транспортного средства представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния. Кроме того, величина движения рассматриваемого транспортного средства в течение времени задержки оценивается на основе состояния (к примеру, скорости транспортного средства и угла поворота при рулении) рассматриваемого транспортного средства и времени задержки, и каждая направляющая линия Q2 расстояния отображается таким образом, что направляющая линия Q2 расстояния накладывается в позиции, которая сдвигается от исходной позиции Q2' к стороне рассматриваемого транспортного средства на величину, соответствующую оцененной величине движения. Таким образом, в настоящем варианте осуществления, направляющая линия Q2 расстояния становится ближе к рассматриваемому транспортному средству в изображении на расстояние, на которое рассматриваемое транспортное средство фактически движется относительно позиции захвата изображений. Водитель может в силу этого распознавать расстояние от рассматриваемого транспортного средства до позиции, представленной посредством направляющей линии Q2 расстояния (например, расстояние в 1,0 м от рассматриваемого транспортного средства), как если расстояние является относительно коротким по сравнению со случаем, в котором направляющая линия Q2 расстояния накладывается в исходной позиции Q2' и отображается. Следовательно, когда помеха O существует в направлении движения рассматриваемого транспортного средства, например, водитель может распознавать расстояние от рассматриваемого транспортного средства до помехи O, как если расстояние является относительно коротким расстоянием.
[0049] Второй вариант осуществления
Далее описывается система 1000 представления информации согласно второму варианту осуществления настоящего изобретения. Система 1000 представления информации согласно второму варианту осуществления имеет конфигурацию, идентичную конфигурации системы 1000 представления информации согласно первому варианту осуществления, и выполняет операции, аналогичные операциям системы 1000 представления информации согласно первому варианту осуществления за исключением того, что система 1000 представления информации согласно второму варианту осуществления работает так, как описано ниже.
[0050] Во втором варианте осуществления, устройство 10 управления терминального устройства 100 дополнительно имеет функцию получения информации обнаружения движущихся объектов для обнаружения движущегося объекта в дополнение к функциям согласно первому варианту осуществления.
[0051] Устройство 10 управления использует функцию получения информации обнаружения движущихся объектов для того, чтобы получать информацию по обнаружению в отношении того, существует или нет движущийся объект рядом с рассматриваемым транспортным средством. В частности, устройство 10 управления использует функцию получения информации обнаружения движущихся объектов для того, чтобы получать информацию в отношении того, существует или нет движущийся объект, из бортового устройства 200. Бортовое устройство 200 включает в себя устройство 43 обнаружения движущихся объектов. Устройство 43 обнаружения движущихся объектов определяет то, существует или нет движущийся объект рядом с транспортным средством, на основе варьирования во времени признаков, которые извлекаются из изображений, захваченных посредством камеры или камер 1. Схема обнаружения движущегося объекта на основе захваченных изображений не ограничена конкретным образом, и схема, известная на момент подачи настоящей заявки, может быть надлежащим образом использована.
[0052] Во втором варианте осуществления, когда беспроводная связь задерживается, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, получается или нет информация по обнаружению в отношении того, что движущийся объект существует, посредством функции получения информации обнаружения движущихся объектов. Когда движущийся объект существует, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы изменять позиции направляющих линий, которые должны накладываться на захваченное изображение, на основе расстояния до движущегося объекта.
[0053] В частности, когда движущийся объект существует рядом с рассматриваемым транспортным средством, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы сначала вычислять расстояние от рассматриваемого транспортного средства (камеры 1) до движущегося объекта. Затем устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, существует или нет движущийся объект в пределах диапазона направляющих линий, на основе вычисленного расстояния до движущегося объекта. Например, устройство 10 управления согласно настоящему варианту осуществления использует функцию наложения направляющих линий для того, чтобы отображать направляющие линии Q2 расстояния таким образом, что как проиллюстрировано на фиг. 7, направляющие линии Q2 расстояния накладываются в позициях, в которых соответствующие расстояния от рассматриваемого транспортного средства (камеры 1) составляют 0,5 м, 1,0 м, 2,0 м и 3,0 м. В этом случае, направляющие линии Q2 расстояния представляют расстояния вплоть до 3,0 м от рассматриваемого транспортного средства, и диапазон направляющих линий в силу этого представляет собой диапазон расстояний в 3,0 м от рассматриваемого транспортного средства. Когда расстояние от рассматриваемого транспортного средства до движущегося объекта превышает 3,0 м, в силу этого устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, что движущийся объект существует за пределами диапазона направляющих линий. Когда расстояние от рассматриваемого транспортного средства до движущегося объекта составляет 3,0 м или меньше, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, что движущийся объект существует в пределах диапазона направляющих линий.
[0054] В таком случае, когда движущихся объектов не существует рядом с рассматриваемым транспортным средством, или движущийся объект существует в пределах диапазона направляющих линий, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что как проиллюстрировано на фиг. 7, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2', в которой расстояние от рассматриваемого транспортного средства представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния. Здесь, фиг. 8 примерно иллюстрирует окружение, в котором рассматриваемое транспортное средство движется задним ходом, и изображение, захваченное во время t20, представляется водителю во время t21, поскольку беспроводная связь задерживается. В этом случае, когда рассматриваемое транспортное средство движется в позицию P11 во время t21, изображение, захваченное в позиции P10, представляется водителю. Следовательно, во время t21, даже если позиция, в которой расстояние от рассматриваемого транспортного средства представляет собой расстояние (например, в 1,0 м от рассматриваемого транспортного средства), представленное посредством направляющей линии Q2 расстояния, составляет P13 в изображении, позиция, в которой фактическое расстояние от рассматриваемого транспортного средства представляет собой расстояние (например, в 1,0 м от рассматриваемого транспортного средства), представленное посредством направляющей линии Q2 расстояния, составляет P14. Соответственно, когда движущихся объектов не существует рядом с рассматриваемым транспортным средством, или движущийся объект существует в пределах диапазона направляющих линий, так что каждая направляющая линия Q2 расстояния в изображении представляет фактическое расстояние от рассматриваемого транспортного средства, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается в позиции P14 на стороне направления движения рассматриваемого транспортного средства относительно позиции P13 в качестве исходной позиции Q2'. В этом случае, устройство 10 управления может использовать функцию наложения направляющих линий для того, чтобы оценивать текущую позицию рассматриваемого транспортного средства на основе времени задержки беспроводной связи и/или состояния рассматриваемого транспортного средства, и отображать каждую направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается в позиции, в которой расстояние от оцененной текущей позиции представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния. Это обеспечивает возможность отображения каждой направляющей линии Q2 расстояния таким образом, чтобы представлять фактическое расстояние от рассматриваемого транспортного средства. Фиг. 7 и фиг. 8 являются видами для описания способа наложения направляющих линий, когда движущихся объектов не существует рядом с рассматриваемым транспортным средством, или движущийся объект существует в пределах диапазона направляющих линий.
[0055] С другой стороны, когда движущийся объект существует за пределами диапазона направляющих линий, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что как проиллюстрировано на фиг. 9, направляющая линия Q2 расстояния накладывается в позиции на стороне рассматриваемого транспортного средства (противоположной стороне по отношению к направлению движения рассматриваемого транспортного средства) относительно исходной позиции Q2'. Это обеспечивает возможность водителю распознавать то, что время и пространство остаются с некоторым допустимым запасом до тех пор, пока рассматриваемое транспортное средство не приближается к движущемуся объекту по сравнению со случаем наложения направляющей линии Q2 расстояния в исходной позиции Q2'. Фиг. 9 является видом для описания способа наложения направляющих линий, когда движущийся объект существует за пределами диапазона направляющих линий.
[0056] Когда движущийся объект существует рядом с рассматриваемым транспортным средством, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать маркер M, указывающий движущийся объект, таким образом, что как проиллюстрировано на фиг. 9, маркер M накладывается на изображение. Когда беспроводная связь задерживается, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать маркер M, указывающий движущийся объект, таким образом, что маркер M накладывается в позиции на стороне рассматриваемого транспортного средства относительно фактической позиции движущегося объекта. В частности, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы оценивать величину движения рассматриваемого транспортного средства от позиции, в которой захватывается изображение, до текущей позиции рассматриваемого транспортного средства на основе информации состояния рассматриваемого транспортного средства и времени задержки беспроводной связи, и отображать маркер M, указывающий движущийся объект, таким образом, что маркер M накладывается в позиции, которая сдвигается от фактической позиции движущегося объекта к стороне рассматриваемого транспортного средства на величину, соответствующую оцененной величине движения. Это обеспечивает возможность отображения фактического расстояния от рассматриваемого транспортного средства до движущегося объекта в изображении, даже когда беспроводная связь задерживается.
[0057] Далее описывается процесс представления информации согласно второму варианту осуществления. Фиг. 10 является блок-схемой последовательности операций способа, иллюстрирующей процесс представления информации согласно второму варианту осуществления. Процесс представления информации, проиллюстрированный на фиг. 10, выполняется посредством устройства 10 управления терминального устройства 100.
[0058] На этапах S201-S203, аналогично этапам S101-S103 первого варианта осуществления, состояние задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200 определяется (этап S201), информация состояния рассматриваемого транспортного средства получается (этап S202), и изображение рядом с рассматриваемым транспортным средством получается (этап S203).
[0059] На этапе S204, устройство 10 управления использует функцию получения информации обнаружения движущихся объектов для того, чтобы получать информацию обнаружения движущихся объектов. Затем на этапе S205, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, существует или нет движущийся объект рядом с рассматриваемым транспортным средством, на основе информации обнаружения движущихся объектов, полученной на этапе S204. Когда движущихся объектов не существует рядом с рассматриваемым транспортным средством, процедура переходит к этапу S211, тогда как когда движущийся объект существует рядом с рассматриваемым транспортным средством, процедура переходит к этапу S206.
[0060] На этапе S206, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, существует или нет движущийся объект в пределах диапазона направляющих линий. Когда движущийся объект существует в пределах диапазона направляющих линий, процедура переходит к этапу S207, тогда как когда движущийся объект существует за пределами диапазона направляющих линий, процедура переходит к этапу S208.
[0061] На этапе S207, уже выполнено определение в отношении того, что движущийся объект существует в пределах диапазона направляющих линий, и устройство 10 управления в силу этого использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что как проиллюстрировано на фиг. 7, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2', на основе информации состояния рассматриваемого транспортного средства, такой как скорость транспортного средства и угол поворота при рулении и время задержки беспроводной связи. Это обеспечивает возможность надлежащего отображения фактического расстояния от рассматриваемого транспортного средства до движущегося объекта в изображении.
[0062] На этапе S208, уже выполнено определение в отношении того, что движущийся объект существует за пределами диапазона направляющих линий, и устройство 10 управления в силу этого использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что как проиллюстрировано на фиг. 9, направляющая линия Q2 расстояния накладывается в позиции на стороне рассматриваемого транспортного средства (противоположной стороне по отношению к направлению движения рассматриваемого транспортного средства) относительно исходной позиции Q2', на основе информации состояния рассматриваемого транспортного средства, такой как скорость транспортного средства и угол поворота при рулении и время задержки беспроводной связи. Это обеспечивает возможность водителю надлежащим образом распознавать то, что время и пространство остаются с некоторым допустимым запасом до тех пор, пока рассматриваемое транспортное средство не приближается к движущемуся объекту по сравнению со случаем наложения направляющей линии Q2 расстояния в исходной позиции Q2'.
[0063] На этапе S209, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы выполнять процесс наложения маркера, указывающего движущийся объект, на изображение. В частности, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать маркер M, указывающий движущийся объект, таким образом, что как проиллюстрировано на фиг. 9, маркер M накладывается в позиции на стороне рассматриваемого транспортного средства относительно фактической позиции движущегося объекта, на основе информации состояния рассматриваемого транспортного средства, такой как скорость транспортного средства и угол поворота при рулении и время задержки беспроводной связи.
[0064] Затем на этапе S210, устройство 10 управления использует функцию представления информации для того, чтобы представлять изображение, на которое накладываются направляющие линии на этапе S207 или S208, и накладывается маркер M, указывающий движущийся объект, на этапе S209, на экране дисплея 30.
[0065] Когда на этапе S205, выполняется определение в отношении того, что движущихся объектов не существует рядом с рассматриваемым транспортным средством, процедура переходит к этапу S211. На этапе S211, аналогично этапу S207, так что каждая направляющая линия Q2 расстояния представляет фактическое расстояние от рассматриваемого транспортного средства, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать направляющую линию Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'. Это обеспечивает возможность надлежащего отображения фактического расстояния от рассматриваемого транспортного средства в изображении. Затем процедура переходит к этапу S110, на котором изображение, на которое накладываются направляющие линии на этапе S211, представляется на экране дисплея 30.
[0066] Как описано выше, когда беспроводная связь задерживается, и движущийся объект обнаруживается, система 1000 представления информации согласно второму варианту осуществления определяет то, существует или нет движущийся объект в пределах диапазона направляющих линий. Когда движущийся объект существует в пределах диапазона направляющих линий, так что каждая направляющая линия Q2 расстояния представляет фактическое расстояние от рассматриваемого транспортного средства, направляющая линия Q2 расстояния отображается таким образом, что как проиллюстрировано на фиг. 7, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2', на основе состояния рассматриваемого транспортного средства и времени задержки. Посредством этой операции согласно второму варианту осуществления, водитель может надлежащим образом распознавать фактическое расстояние от рассматриваемого транспортного средства до движущегося объекта, даже когда беспроводная связь задерживается.
[0067] Кроме того, во втором варианте осуществления, когда беспроводная связь задерживается, и движущийся объект существует за пределами диапазона направляющих линий, каждая направляющая линия Q2 расстояния отображается таким образом, что как проиллюстрировано на фиг. 9, направляющая линия Q2 расстояния накладывается в позиции на стороне рассматриваемого транспортного средства (противоположной стороне по отношению к направлению движения рассматриваемого транспортного средства) относительно исходной позиции Q2'. Это обеспечивает возможность водителю надлежащим образом распознавать то, что время и пространство остаются с некоторым допустимым запасом до тех пор, пока рассматриваемое транспортное средство не приближается к движущемуся объекту по сравнению со случаем отображения направляющей линии Q2 расстояния таким образом, что направляющая линия Q2 расстояния накладывается в исходной позиции Q2'.
[0068] Кроме того, во втором варианте осуществления, когда беспроводная связь задерживается, и движущийся объект не существует рядом с рассматриваемым транспортным средством, так что каждая направляющая линия Q2 расстояния представляет фактическое расстояние от рассматриваемого транспортного средства, направляющая линия Q2 расстояния отображается таким образом, что как проиллюстрировано на фиг. 7, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'. Посредством этой операции, когда беспроводная связь задерживается, и движущийся объект не существует рядом с рассматриваемым транспортным средством, фактическое расстояние от рассматриваемого транспортного средства может надлежащим образом отображаться в изображении с использованием направляющих линий Q2 расстояния.
[0069] Помимо этого, во втором варианте осуществления, когда беспроводная связь задерживается, и движущийся объект существует рядом с рассматриваемым транспортным средством, маркер M, указывающий движущийся объект, отображается таким образом, что как проиллюстрировано на фиг. 9, маркер M накладывается в позиции на стороне рассматриваемого транспортного средства относительно фактической позиции движущегося объекта. Посредством этой операции, даже когда беспроводная связь задерживается, фактическое расстояние от рассматриваемого транспортного средства до движущегося объекта может надлежащим образом отображаться в изображении.
[0070] Следует понимать, что когда беспроводная связь не задерживается во втором варианте осуществления, каждая направляющая линия Q2 расстояния может отображаться таким образом, что аналогично первому варианту осуществления, направляющая линия Q2 расстояния накладывается в исходной позиции Q2', в которой расстояние от рассматриваемого транспортного средства представляет собой расстояние, представленное посредством направляющей линии Q2 расстояния (то же применимо к третьему варианту осуществления, который описывается ниже).
[0071] Третий вариант осуществления
Далее описывается система 1000 представления информации согласно третьему варианту осуществления настоящего изобретения. Система 1000 представления информации согласно третьему варианту осуществления имеет конфигурацию, идентичную конфигурации системы 1000 представления информации согласно первому варианту осуществления, и выполняет операции, аналогичные операциям системы 1000 представления информации согласно первому варианту осуществления за исключением того, что система 1000 представления информации согласно третьему варианту осуществления работает так, как описано ниже.
[0072] В третьем варианте осуществления, устройство 10 управления использует функцию определения состояния задержки, аналогично первому варианту осуществления, для того чтобы определять состояние задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200. В третьем варианте осуществления, устройство 10 управления использует функцию определения состояния задержки для того, чтобы определять состояние задержки беспроводной связи из числа состояния прерывания связи, нормального состояния задержки и анормального состояния задержки.
[0073] В частности, когда время задержки беспроводной связи составляет предварительно определенный период времени (например, 200 мс) или короче, устройство 10 управления использует функцию определения состояния задержки для того, чтобы определять то, что состояние задержки беспроводной связи находится в нормальном состоянии задержки. Когда время задержки беспроводной связи превышает предварительно определенный период времени, устройство 10 управления использует функцию определения состояния задержки для того, чтобы определять то, что состояние задержки беспроводной связи находится в анормальном состоянии задержки. Когда беспроводная связь не может устанавливаться между терминальным устройством 100 и бортовым устройством 200, устройство 10 управления использует функцию определения состояния задержки для того, чтобы определять то, что состояние задержки беспроводной связи находится в состоянии прерывания связи.
[0074] В третьем варианте осуществления, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы изменять режим отображения для направляющих линий на основе состояния задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200. В частности, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы изменять режим отображения для направляющих линий в соответствии с состоянием задержки беспроводной связи (состоянием прерывания связи, нормальным состоянием задержки или анормальным состоянием задержки), так что водитель может распознавать то, в каком состоянии из состояния прерывания связи, нормального состояния задержки и анормального состояния задержки находится состояние задержки беспроводной связи. Здесь, фиг. 11-13 являются видами для описания режимов отображения для направляющих линий в третьем варианте осуществления.
[0075] Например, когда выполняется определение в отношении того, что состояние задержки беспроводной связи находится в нормальном состоянии задержки, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что как проиллюстрировано на фиг. 11, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'.
[0076] Когда выполняется определение в отношении того, что состояние задержки беспроводной связи находится в анормальном состоянии задержки, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать направляющие линии с затемнением по сравнению с нормальным состоянием задержки или отображать направляющие линии в виде пунктирных линий, как проиллюстрировано на фиг. 12. Это обеспечивает возможность водителю надлежащим образом распознавать то, что беспроводная связь между терминальным устройством 100 и бортовым устройством 200 находится в анормальном состоянии задержки. В окружении, проиллюстрированном на фиг. 12, беспроводная связь задерживается, и устройство 10 управления в силу этого использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что аналогично окружению, проиллюстрированному на фиг. 11, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'.
[0077] Когда выполняется определение в отношении того, что состояние задержки беспроводной связи находится в состоянии прерывания связи, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы сначала отображать направляющие линии с выделением относительно нормального состояния задержки, как проиллюстрировано в части (A) по фиг. 13. Например, устройство 10 управления может использовать функцию наложения направляющих линий для того, чтобы отображать направляющие линии с более глубоким цветом относительно нормального состояния задержки или отображать направляющие линии в виде полужирных линий, чтобы за счет этого отображать направляющие линии с выделением относительно нормального состояния задержки. Затем после того, как определенный период времени проходит от отображения с выделением направляющих линий, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы скрывать направляющие линии, как проиллюстрировано в части (B) по фиг. 13. Это обеспечивает возможность водителю надлежащим образом распознавать то, что беспроводная связь между терминальным устройством 100 и бортовым устройством 200 находится в состоянии прерывания связи. Также в окружении, проиллюстрированном на фиг. 13, когда направляющие линии Q2 расстояния отображаются с выделением, каждая направляющая линия Q2 расстояния может отображаться таким образом, что аналогично окружениям, проиллюстрированным на фиг. 11 и 12, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'.
[0078] Далее описывается процесс представления информации согласно третьему варианту осуществления. Фиг. 14 является блок-схемой последовательности операций способа, иллюстрирующей процесс представления информации согласно третьему варианту осуществления. Процесс представления информации, проиллюстрированный на фиг. 14, выполняется посредством устройства 10 управления терминального устройства 100.
[0079] На этапах S301-S303, аналогично этапам S101-S103 первого варианта осуществления, состояние задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200 определяется (этап S301), информация состояния рассматриваемого транспортного средства получается (этап S302), и изображение рядом с рассматриваемым транспортным средством получается (этап S303). На этапе S301, выполняется определение в отношении того, в каком состоянии из состояния прерывания связи, нормального состояния задержки и анормального состояния задержки находится состояние задержки беспроводной связи.
[0080] На этапе S304, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, находится или нет состояние задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200 в состоянии прерывания связи, на основе результата определения на этапе S301. Когда выполняется определение в отношении того, что состояние задержки находится в состоянии прерывания связи, процедура переходит к этапу S308, тогда когда выполняется определение в отношении того, что состояние задержки не находится в состоянии прерывания связи, процедура переходит к этапу S305.
[0081] На этапе S305, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, находится или нет состояние задержки беспроводной связи в нормальном состоянии задержки. Например, когда время задержки беспроводной связи составляет определенный период времени или короче и выполняется определение в отношении того, что состояние задержки находится в нормальном состоянии задержки, процедура переходит к этапу S306, тогда как когда время задержки беспроводной связи превышает определенный период времени, и выполняется определение в отношении того, что состояние задержки находится в анормальном состоянии задержки, процедура переходит к этапу S307.
[0082] На этапе S306, уже выполнено определение в отношении того, что состояние задержки беспроводной связи находится в нормальном состоянии задержки, и устройство 10 управления в силу этого использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что как проиллюстрировано на фиг. 11, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'.
[0083] Также на этапе S307, уже выполнено определение в отношении того, что беспроводная связь задерживается, и устройство 10 управления в силу этого использует функцию наложения направляющих линий для того, чтобы отображать каждую направляющую линию Q2 расстояния таким образом, что как проиллюстрировано на фиг. 12, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'. На этапе S307, уже выполнено определение в отношении того, что состояние задержки беспроводной связи находится в анормальном состоянии задержки, и устройство 10 управления в силу этого использует функцию наложения направляющих линий для того, чтобы отображать направляющие линии с затемнением по сравнению со случаем нормального состояния задержки, и отображать направляющие линии в виде пунктирных линий. Это обеспечивает возможность водителю надлежащим образом распознавать то, что состояние задержки беспроводной связи находится в анормальном состоянии задержки.
[0084] Когда на этапе S304, выполняется определение в отношении того, что состояние задержки беспроводной связи находится в состоянии прерывания связи, процедура переходит к этапу S308. На этапе S308, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы отображать направляющие линии с выделением, как проиллюстрировано в части (A) по фиг. 13, и каждая направляющая линия Q2 расстояния отображается таким образом, что направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'.
[0085] После этапа S308 выполняется этап S309, на котором устройство 10 управления использует функцию наложения направляющих линий для того, чтобы определять то, проходит или нет определенный период времени после того, как направляющие лини отображаются с выделением. Процедура ожидает на этапе S309 до тех пор, пока определенный период времени не проходит, и переходит к этапу S310, когда определенный период времени проходит. На этапе S310, устройство 10 управления использует функцию наложения направляющих линий для того, чтобы скрывать направляющие линии. Таким образом, когда состояние задержки беспроводной связи находится в состоянии прерывания связи, направляющие линии отображаются с выделением и затем скрываются, чтобы за счет этого обеспечивать возможность водителю надлежащим образом распознавать то, что состояние задержки беспроводной связи находится в состоянии прерывания связи.
[0086] На этапе S311, устройство 10 управления использует функцию представления информации для того, чтобы отображать изображение, на которое накладываются направляющие линии на этапе S306, S307 или S308, на экране дисплея 30.
[0087] Как описано выше, система 1000 представления информации согласно третьему варианту осуществления изменяет режим отображения для направляющих линий на основе состояния задержки беспроводной связи между терминальным устройством 100 и бортовым устройством 200. Например, когда состояние задержки беспроводной связи находится в анормальном состоянии задержки, направляющие линии отображаются в конкретной форме, к примеру, с затемнением и в виде пунктирных линий, по сравнению со случаем нормального состояния задержки. Когда состояние задержки беспроводной связи находится в состоянии прерывания связи, направляющие линии отображаются с выделением по сравнению с нормальным состоянием задержки и затем скрываются. Через эту работу третьего варианта осуществления, может получаться такое преимущество, что водителю обеспечивается возможность надлежащим образом распознавать состояние задержки беспроводной связи, помимо преимуществ, полученных в первом варианте осуществления.
[0088] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0089] Например, в вышеописанных вариантах осуществления, аспект системы представления информации согласно настоящему изобретению описан со ссылкой на терминальное устройство 100 и систему 1000 представления информации, но настоящее изобретение не ограничено этим.
[0090] В вышеописанных вариантах осуществления, аспект системы представления информации согласно настоящему изобретению описан со ссылкой на систему 1000 представления информации, содержащую терминальное устройство 100, которое содержит устройство 10 управления, включающее в себя CPU 11, ROM 12 и RAM 13, и бортовое устройство 200, но настоящее изобретение не ограничено этим.
[0091] В вышеописанных вариантах осуществления, аспект бортового устройства, имеющего камеру и функцию связи, описан со ссылкой на бортовое устройство 200, которое содержит камеры 1, устройство 2 связи, контроллер 3 транспортного средства и модули 4, но настоящее изобретение не ограничено этим.
[0092] В вышеописанных вариантах осуществления, описаны примеры, в которых направляющие линии отображаются таким образом, что они накладываются на изображение вида сзади, захваченное позади рассматриваемого транспортного средства, но настоящее изобретение не ограничено этими примерами. В одном или более вариантов осуществления настоящего изобретения, направляющие линии могут отображаться таким образом, что они накладываются на изображение вида спереди, захваченное впереди рассматриваемого транспортного средства, или изображение вида сбоку, захваченное сбоку от рассматриваемого транспортного средства. В альтернативном варианте осуществления настоящего изобретения, проецируемое изображение может формироваться посредством проецирования множества изображений, захваченных посредством множества камер 1, на плоскость проецирования, в которой рассматриваемое транспортное средство просматривается из виртуальной точки обзора выше рассматриваемого транспортного средства, и направляющие линии могут отображаться таким образом, что они накладываются на проецируемое изображение. Также в этом случае, на основе скорости, ускорения транспортного средства и угла поворота при рулении рассматриваемого транспортного средства и времени задержки беспроводной связи, каждая направляющая линия может отображаться таким образом, что направляющая линия накладывается в позиции на стороне рассматриваемого транспортного средства относительно исходной позиции Q2' или позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'.
[0093] В вышеописанных вариантах осуществления, описаны примеры, в которых когда беспроводная связь задерживается, каждая направляющая линия Q2 расстояния отображается таким образом, что направляющая линия Q2 расстояния накладывается в любой из позиции на стороне рассматриваемого транспортного средства относительно исходной позиции Q2' и позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2', но настоящее изобретение не ограничено этими примерами. В одном или более вариантов осуществления настоящего изобретения, часть направляющих линий Q2 расстояния может отображаться таким образом, что они накладываются в позиции на стороне рассматриваемого транспортного средства относительно исходной позиции Q2', и другие направляющие линии Q2 расстояния могут отображаться таким образом, что они накладываются в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'. Например, относительно направляющих линий Q2 расстояния, которые представляют расстояния в пределах определенного расстояния от рассматриваемого транспортного средства, они могут отображаться таким образом, что они накладываются в позиции на стороне рассматриваемого транспортного средства относительно исходной позиции Q2', тогда как, относительно направляющих линий Q2 расстояния, которые представляют расстояния за пределами определенного расстояния от рассматриваемого транспортного средства, они могут отображаться таким образом, что они накладываются в позиции на стороне направления движения рассматриваемого транспортного средства относительно исходной позиции Q2'.
[0094] В вышеописанных вариантах осуществления, описаны примеры, в которых направляющие линии, которые включают в себя направляющие линии Q1 ширины транспортного средства и направляющие линии Q2 расстояния, отображаются таким образом, что они накладываются на изображение. Помимо этого, линия P прогнозного маршрута может отображаться таким образом, что она дополнительно накладывается на изображение. Линия P прогнозного маршрута представляет траекторию, по которой прогнозируется движение рассматриваемого транспортного средства.
[0095] В вышеописанном первом варианте осуществления, описан пример, в котором когда беспроводная связь задерживается, каждая направляющая линия Q2 расстояния отображается таким образом, что как проиллюстрировано на фиг. 5, направляющая линия Q2 расстояния накладывается в позиции на стороне рассматриваемого транспортного средства относительно исходной позиции Q2', но настоящее изобретение не ограничено этим примером. В одном или более вариантов осуществления настоящего изобретения, каждая направляющая линия Q2 расстояния может отображаться таким образом, что как проиллюстрировано на фиг. 7, например, направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения стороны рассматриваемого транспортного средства относительно исходной позиции Q2'. В этом случае, водителю может обеспечиваться возможность распознавать фактическое расстояние от рассматриваемого транспортного средства в изображении.
[0096] В вышеописанном втором варианте осуществления, описан пример, в котором когда беспроводная связь задерживается, и движущихся объектов не существует рядом с рассматриваемым транспортным средством, или движущийся объект существует за пределами диапазона направляющих линий, так что все направляющие линии Q2 расстояния представляют фактическое расстояние от рассматриваемого транспортного средства, направляющая линия Q2 расстояния отображается таким образом, что она накладывается в позиции на стороне направления движения стороны рассматриваемого транспортного средства относительно исходной позиции Q2', но настоящее изобретение не ограничено этим примером. Например, при условии, что каждая направляющая линия Q2 расстояния накладывается в позиции на стороне направления движения стороны рассматриваемого транспортного средства относительно исходной позиции Q2', направляющие линии Q2 расстояния могут отображаться таким образом, что они накладываются в позиции, которая не соответствует фактическому расстоянию из рассматриваемого транспортного средства (например, в позиции, которая сдвигается от исходной позиции Q2' к стороне направления движения рассматриваемого транспортного средства на предварительно определенное расстояние). Также в этом случае, расстояние, представленное посредством направляющей линии Q2 расстояния, может представляться водителю в качестве расстояния ближе к фактическому расстоянию от рассматриваемого транспортного средства.
[0097] В вышеописанном третьем варианте осуществления, описан пример, в котором режим отображения для направляющих линий изменяется на основе состояния задержки беспроводной связи, но режим отображения для направляющих линий, соответствующих каждому состоянию задержки, не ограничен вышеописанными примерами и может надлежащим образом задаваться. Например, помимо или альтернативно цвету, ширине и форме (к примеру, пунктирным линиям) направляющих линий, прозрачность направляющих линий может изменяться, или направляющие линии могут отображаться таким образом, чтобы они включаются и выключаются с миганием. Например, когда состояние связи беспроводной связи находится в анормальном состоянии задержки, прозрачность направляющих линий может повышаться, или направляющие линии могут отображаться таким образом, чтобы они включаются и выключаются с миганием. Когда состояние связи беспроводной связи находится в состоянии прерывания связи, прозрачность направляющих линий может сначала уменьшаться, а затем повышаться. В одном или более вариантов осуществления настоящего изобретения, направляющие линии могут отображаться таким образом, чтобы они включаются и выключаются с миганием, вместо скрытия направляющих линий. В случае нормального состояния задержки, направляющие линии могут отображаться в виде линий неяркого цвета, к примеру, синего, зеленого и фиолетово-синего, которые являются относительно не отличимыми, пунктирных линий и/или относительно узких линий, тогда как в случае анормального состояния задержки, направляющие линии могут отображаться в виде линий яркого цвета, к примеру, красного, оранжевого и желтого, которые являются относительно отличимыми, сплошных линий и/или относительно широких линий.
[0098] В вышеописанном втором варианте осуществления, описан пример, в котором обнаруживается движущийся объект, существующий рядом с рассматриваемым транспортным средством, но может обнаруживаться помеха, существующая рядом с рассматриваемым транспортным средством (к примеру, стенка и бордюрный камень). Также в этом случае, позиции для наложения направляющих линий Q2 расстояния могут определяться, аналогично вышеописанным вариантам осуществления, на основе определения в отношении того, существует или нет помеха рядом с рассматриваемым транспортным средством, определения в отношении того, существует или нет помеха в пределах диапазона направляющих линий, и/или другого определения.
[0099] В устройстве 10 управления согласно вышеописанным вариантам осуществления, функция получения изображений соответствует устройству получения изображений настоящего изобретения, функция наложения направляющих линий соответствует устройству получения информации касательно транспортного средства и устройству наложения настоящего изобретения, функция определения состояния задержки соответствует устройству определения настоящего изобретения, и функция получения информации обнаружения движущихся объектов соответствует устройству получения информации помех настоящего изобретения.
Описание условных обозначений
[0100] 1000 - система представления информации
100 - терминальное устройство
10 - устройство управления
11 - CPU
12 - ROM
13 - RAM
20 - устройство связи
30 - дисплей
200 - бортовое устройство
1, 1a-1d - камера
2 - устройство связи
3 - контроллер транспортного средства
4 - модули
41 - устройство рулевого управления
42 - датчик ускорения
43 - устройство обнаружения движущихся объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ | 2014 |
|
RU2647688C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ОТОБРАЖЕНИЕМ | 2015 |
|
RU2704773C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ ДЛЯ УСТРОЙСТВА ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734643C1 |
| Бортовое устройство связи транспортного средства и транспортное средство | 2018 |
|
RU2706506C1 |
| СПОСОБ ВВОДА СТИЛУСНЫМ ПЕРОМ, ЭЛЕКТРОННОЕ УСТРОЙСТВО И СИСТЕМА | 2022 |
|
RU2831519C2 |
| НАВИГАЦИОННОЕ УСТРОЙСТВО С ИНФОРМАЦИЕЙ, ПОЛУЧАЕМОЙ ОТ КАМЕРЫ | 2005 |
|
RU2375756C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2659670C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СИНТЕЗА ОБЪЕКТОВ ВИРТУАЛЬНОЙ РЕАЛЬНОСТИ | 2018 |
|
RU2715797C1 |
| СПОСОБ И УСТРОЙСТВО ПОМОЩИ ПРИ ВОЖДЕНИИ | 2016 |
|
RU2719080C2 |
| УСТРОЙСТВО ВЫДАЧИ УВЕДОМЛЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2702281C1 |
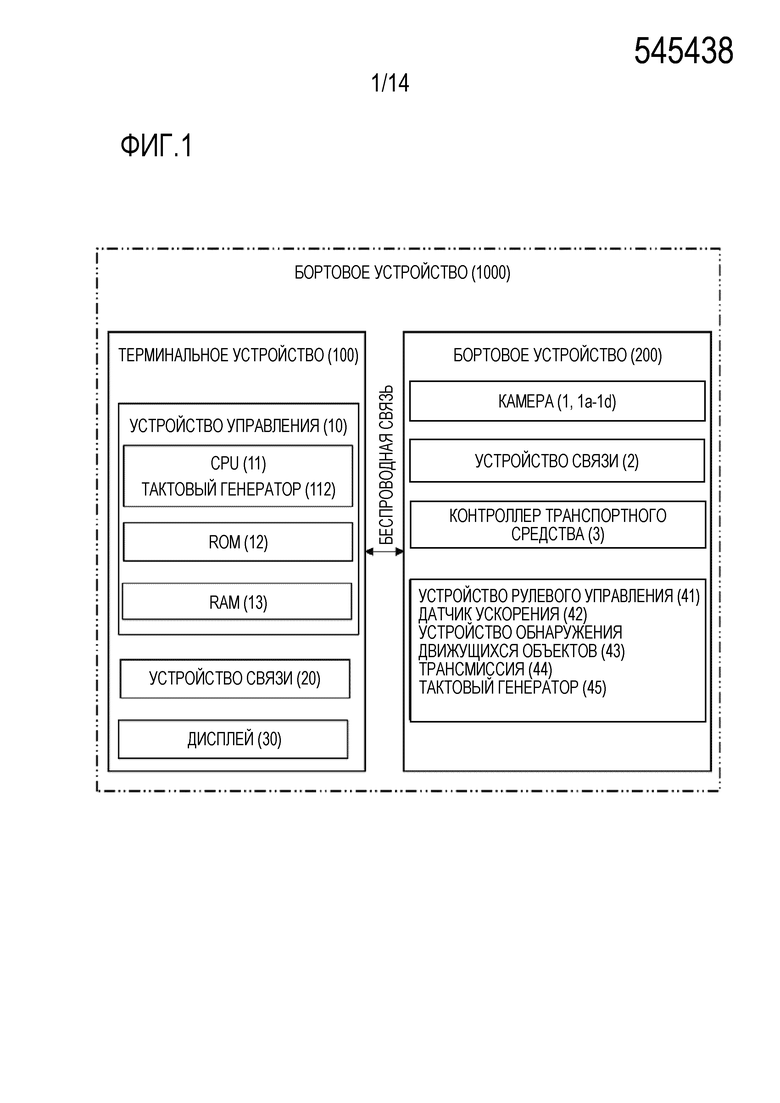
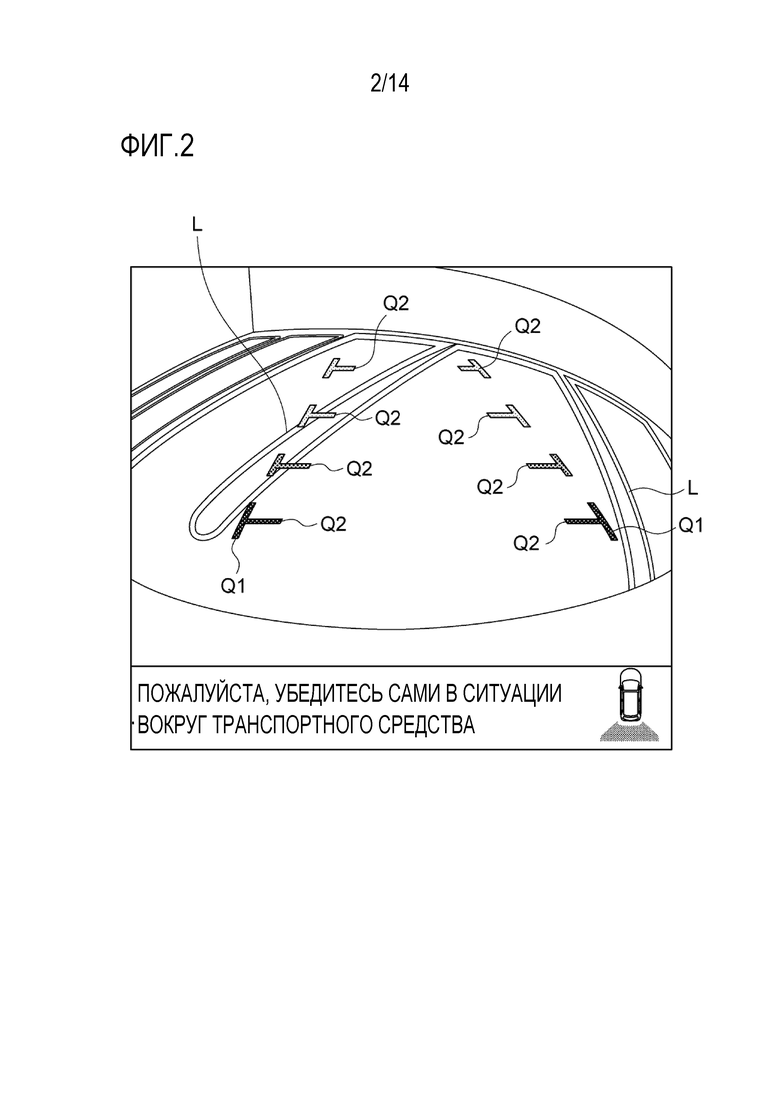
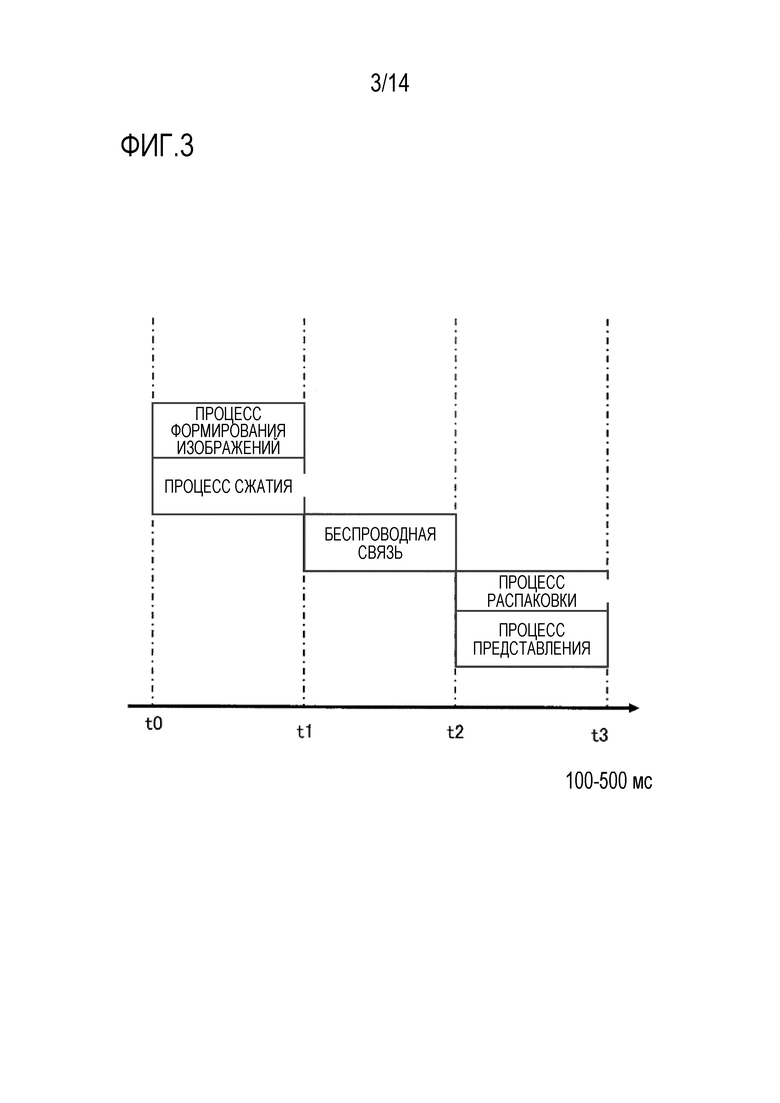
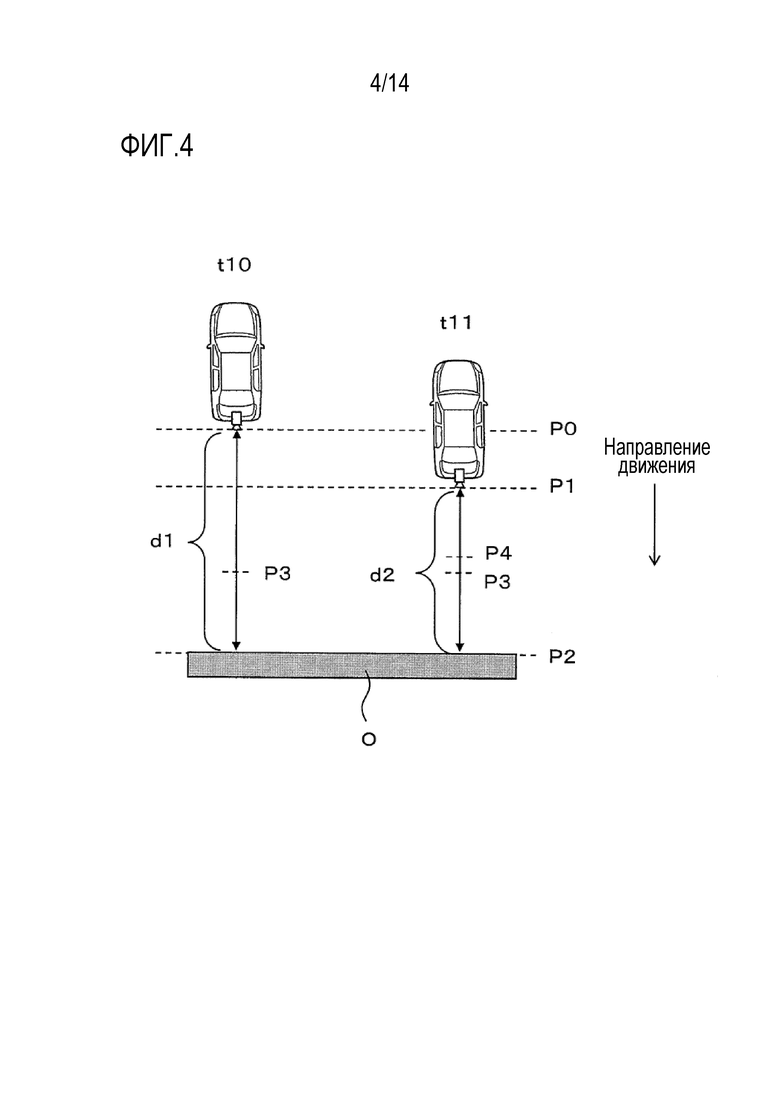
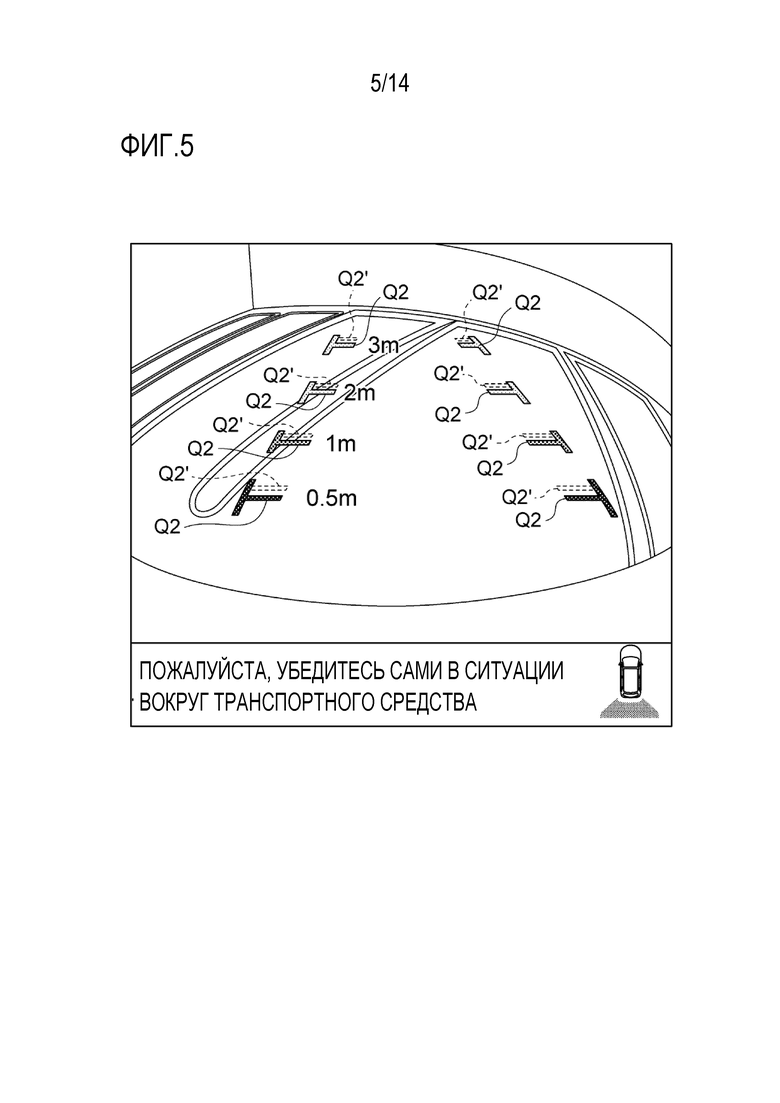
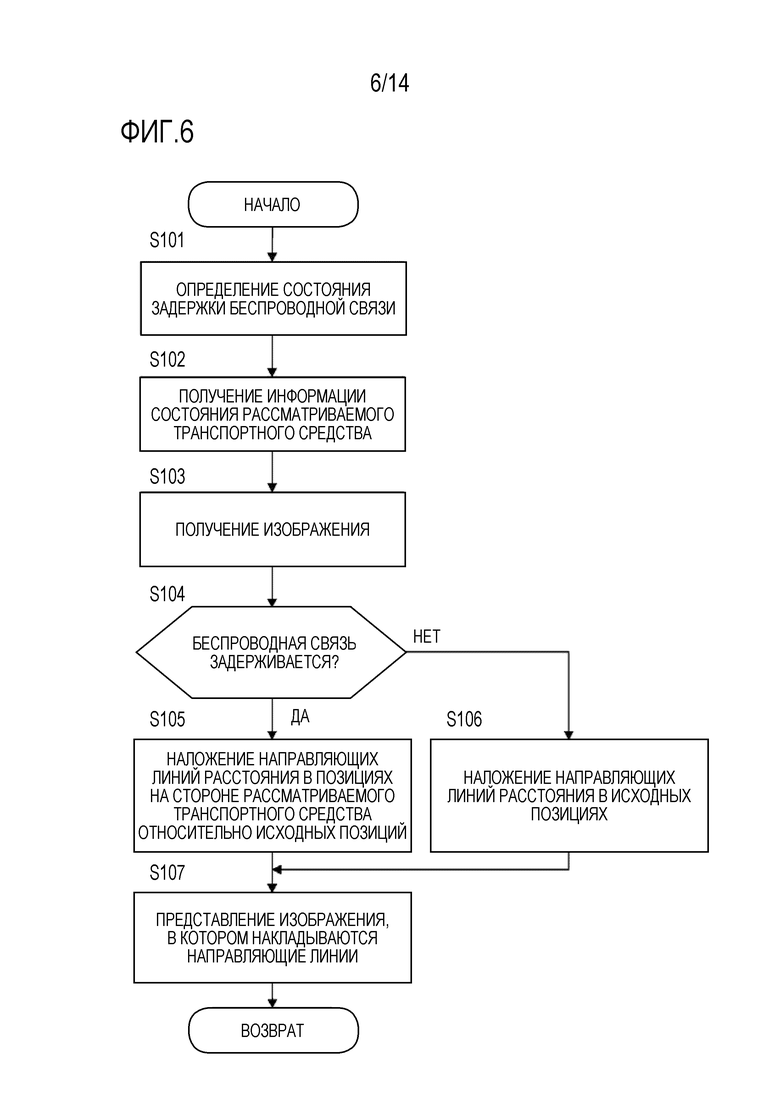
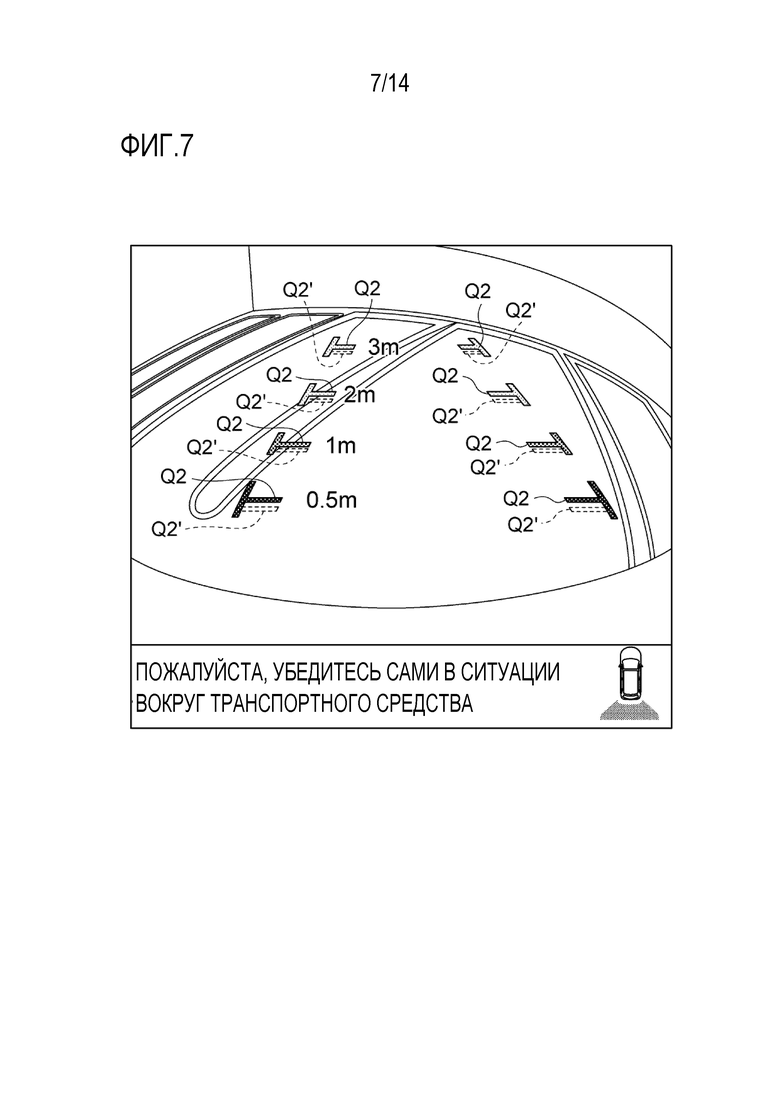
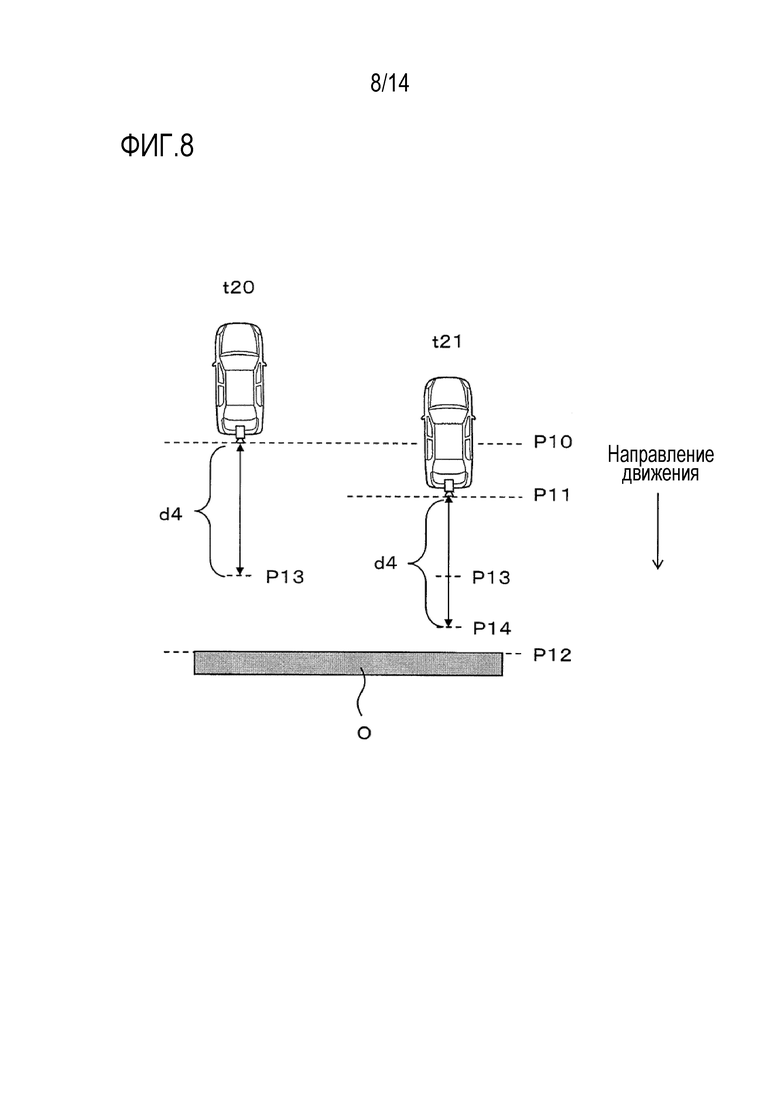
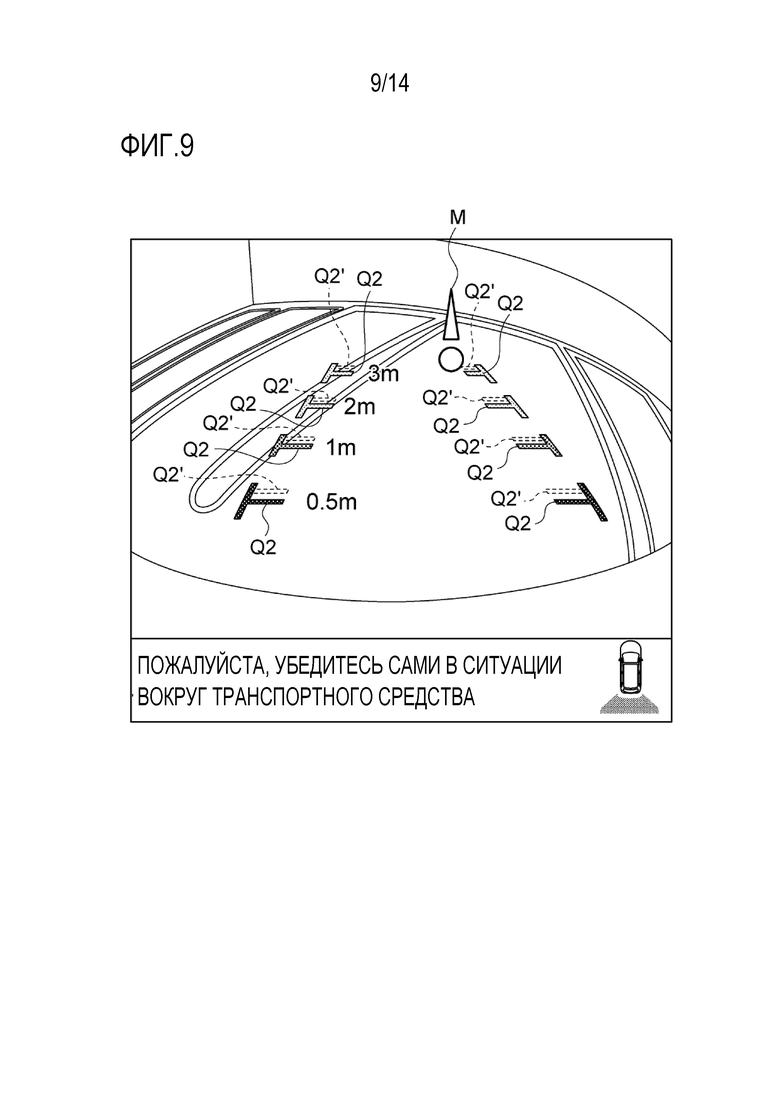
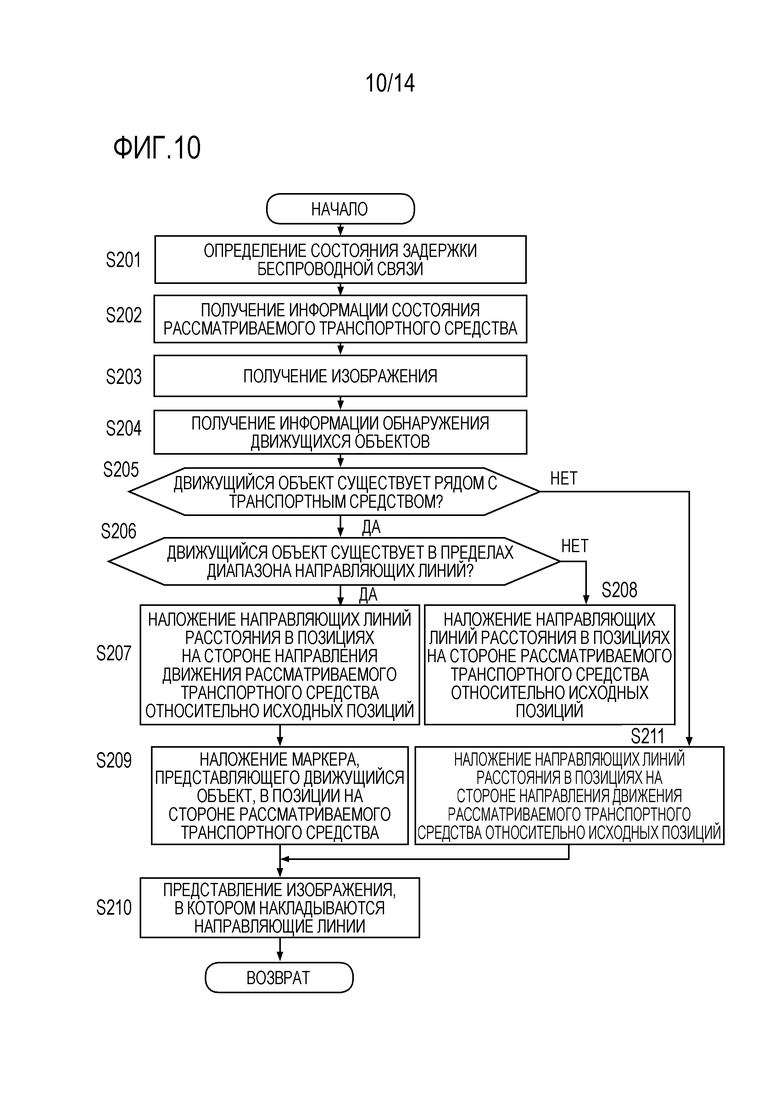
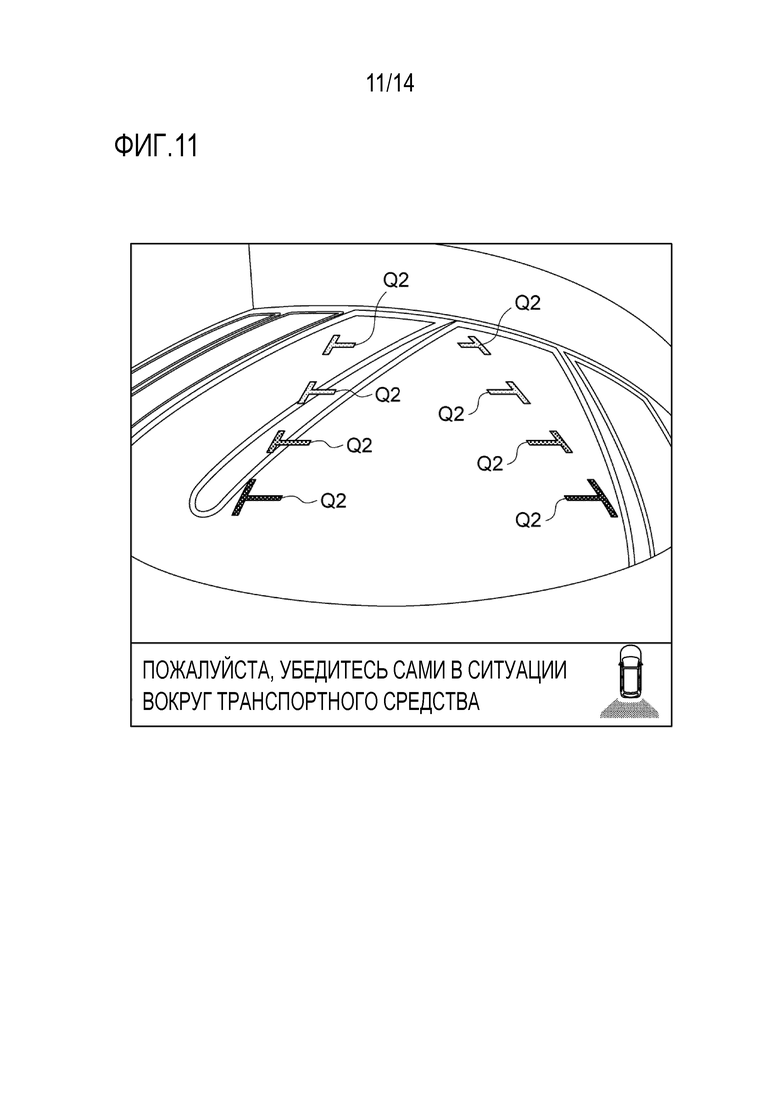
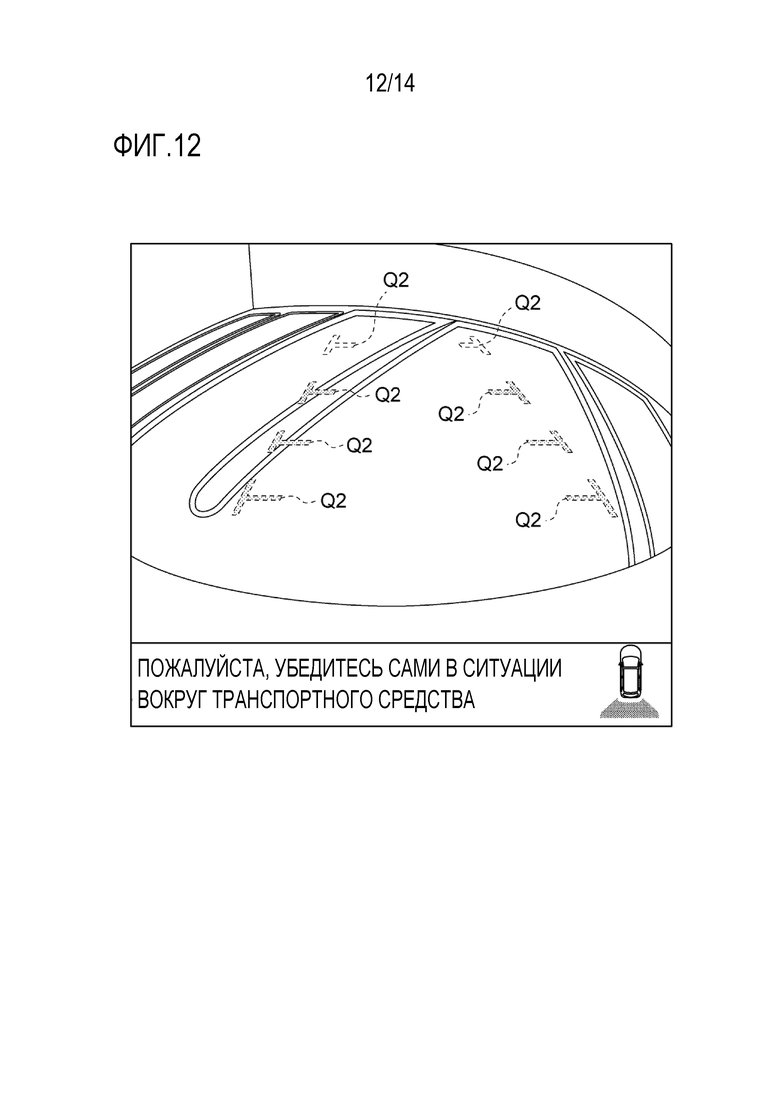
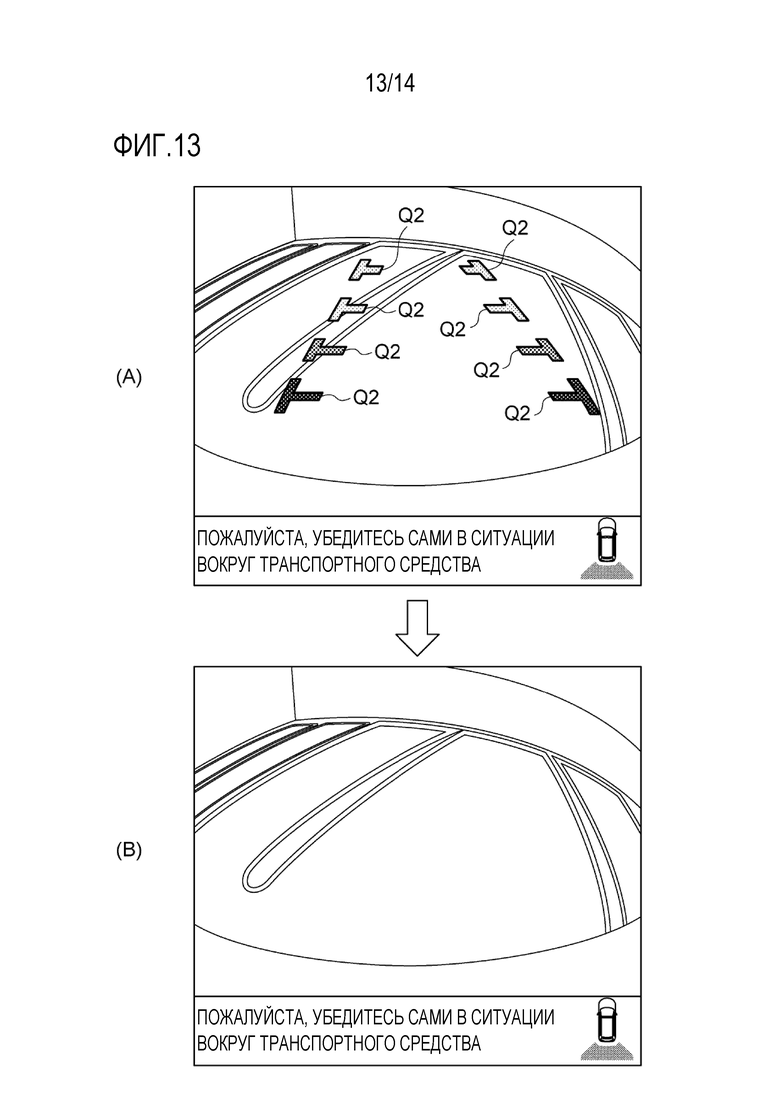
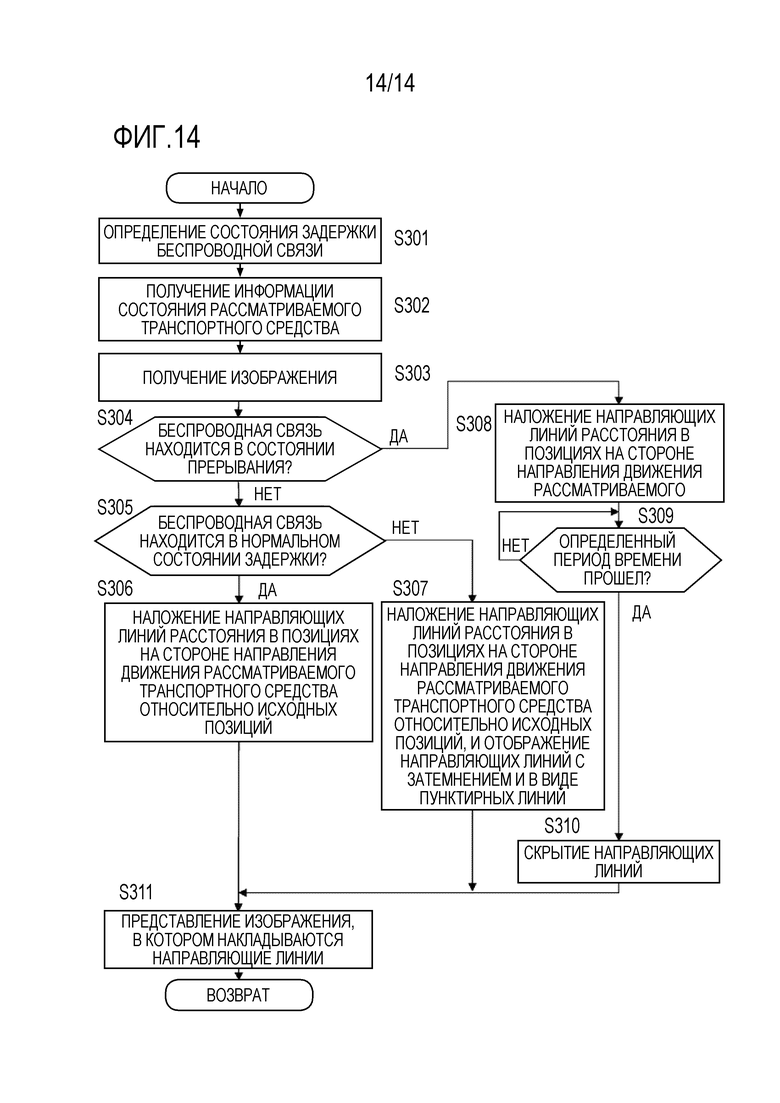
Изобретение относится к системе обзора вокруг транспортного средства. Технический результат заключается в обеспечении в реальном времени информации о состояние рядом с транспортным средством, когда задержка возникает в беспроводной связи между бортовым и терминальным устройствами. Предложена система представления информации, содержащая: бортовое устройство (200) c видеокамерой (1) и терминальное устройство (100) для беспроводной связи с бортовым устройством (200). Терминальное устройство (100) содержит: устройство (10) получения изображения рядом с транспортным средством, захваченного видеокамерой (1), устройство (10) наложения на изображение маркера расстояния от транспортного средства, устройство определения (10) состояния задержки беспроводной связи между бортовым (200) и терминальным устройствами (100), и устройство (10) представления изображения, на которое накладывается маркер расстояния. Когда беспроводная связь не задерживается, устройство (10) наложения накладывает маркер расстояния на изображение в исходной позиции, в которой расстояние от транспортного средства представляет собой расстояние, указанное маркером расстояния. Когда беспроводная связь задерживается, устройство (10) наложения накладывает маркер расстояния на изображение в позиции на стороне движения или направления движения транспортного средства относительно исходной позиции. 8 з.п. ф-лы, 14 ил.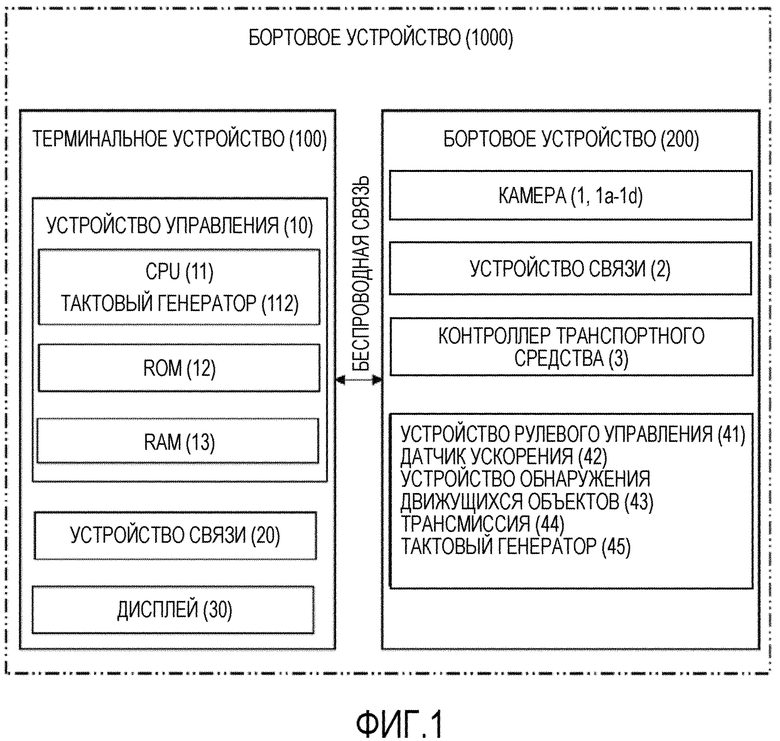
1. Система представления информации, содержащая:
- бортовое устройство, включающее в себя камеру, предоставленную на транспортном средстве; и
- терминальное устройство, имеющее портативность и осуществляющее беспроводную связь с бортовым устройством,
- причем терминальное устройство выполнено с возможностью:
- получать изображение рядом с транспортным средством, захваченное посредством камеры;
- накладывать маркер расстояния на изображение, причем маркер расстояния представляет расстояние от транспортного средства;
- определять состояние задержки, включающее в себя время задержки беспроводной связи между бортовым устройством и терминальным устройством; и
- представлять изображение, на которое накладывается маркер расстояния,
- при этом, когда беспроводная связь не задерживается, терминальное устройство накладывает маркер расстояния на изображение в исходной позиции, в которой расстояние от транспортного средства представляет собой расстояние, представленное посредством маркера расстояния, и
- когда беспроводная связь задерживается, терминальное устройство накладывает маркер расстояния на изображение в позиции на стороне направления движения транспортного средства относительно исходной позиции или в позиции на стороне транспортного средства относительно исходной позиции.
2. Система представления информации по п. 1, в которой терминальное устройство получает информацию состояния транспортного средства, оценивает величину движения от позиции транспортного средства при захвате изображения до текущей позиции транспортного средства на основе информации состояния транспортного средства и времени задержки беспроводной связи и накладывает маркер расстояния в позиции, сдвигаемой от исходной позиции к стороне направления движения транспортного средства или к стороне транспортного средства на величину движения.
3. Система представления информации по п. 1, в которой терминальное устройство накладывает маркер расстояния в позиции, сдвигаемой от исходной позиции к стороне направления движения транспортного средства или к стороне транспортного средства на предварительно определенную величину движения.
4. Система представления информации по любому из пп. 1-3, в которой терминальное устройство получает информацию относительно помехи, существующей рядом с транспортным средством, и
- терминальное устройство определяет позицию для наложения маркера расстояния с учетом информации относительно помехи.
5. Система представления информации по п. 4, в которой, когда беспроводная связь задерживается и помеха не обнаруживается, терминальное устройство накладывает маркер расстояния на стороне направления движения транспортного средства относительно исходной позиции.
6. Система представления информации по п. 4, в которой, когда беспроводная связь задерживается и помеха существует в пределах диапазона расстояний от транспортного средства, представленного посредством маркера расстояния в изображении, терминальное устройство накладывает маркер расстояния на стороне направления движения транспортного средства относительно исходной позиции.
7. Система представления информации по п. 4, в которой, когда беспроводная связь задерживается и помеха существует за пределами диапазона расстояний от транспортного средства, представленного посредством маркера расстояния в изображении, терминальное устройство накладывает маркер расстояния на стороне транспортного средства относительно исходной позиции.
8. Система представления информации по п. 4, в которой, когда помеха существует, терминальное устройство накладывает маркер, представляющий позицию помехи, в позиции на стороне транспортного средства относительно фактической позиции помехи.
9. Система представления информации по любому из пп. 1-3, в которой терминальное устройство изменяет режим отображения для маркера расстояния в изображении в соответствии с состоянием задержки беспроводной связи.
| JP 2011175507 A, 2011-09-08 | |||
| US 2012194355 A1, 2012-08-02 | |||
| US 2005231341 A1, 2005-10-20 | |||
| WO 2015045578 A1, 2015-04-02 | |||
| JP 2003259355 A, 2003-09-12 | |||
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДИСПЛЕЯ ПАРКОВОЧНОГО УСТРОЙСТВА И СПОСОБ ОТОБРАЖЕНИЯ | 2008 |
|
RU2468944C2 |

