ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к способу помощи при парковке и устройству помощи при парковке, которые ищут пустые парковочные места вокруг рассматриваемого транспортного средства, отображают вспомогательные изображения, указывающие положения пустых парковочных мест, на изображении окружения зоны, включающей в себя рассматриваемое транспортное средство, наблюдаемого сверху, и устанавливают цель парковки на основании отображаемых вспомогательных изображений.
УРОВЕНЬ ТЕХНИКИ
[0002] В патентном документе 1 уровня техники было раскрыто установленное в транспортном средстве (бортовое) навигационное устройство для направления на парковочное место, соответствующее предпочтениям пользователя. Раскрытое в патентном документе 1 бортовое навигационное устройство устанавливает порядок приоритета парковочных мест на стоянке и, когда парковочное место с наивысшим приоритетом не пусто, бортовое навигационное устройство определяет парковочное место со вторым по величине приоритетом в качестве рекомендуемого парковочного места.
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003] Патентный документ 1: Публикация заявки на патент Японии № 2008–96362.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004] Вышеописанное обычное бортовое навигационное устройство предназначено для стоянки, на которой парковочные места визуально четко размечены. Однако на стоянке, на которой белые линии не размечены четко, невозможно отобразить изображения, указывающие положения пустых парковочных мест, поскольку обнаружить парковочные места трудно. По этой причине традиционно существовала проблема, заключающаяся в том, что невозможно установить цель парковки на основе изображений, указывающих положения пустых парковочных мест, а значит, невозможно использовать автоматизированную парковку.
[0005] Настоящее изобретение предложено в свете вышеописанных обстоятельств, и задача настоящего изобретения состоит в том, чтобы предоставить способ помощи при парковке и устройство для его осуществления, которое может отображать изображения, указывающие положения пустых парковочных мест, и использовать управление помощью при парковке даже для такой стоянки, на которой парковочные места визуально четко не размечены.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006] Чтобы решить вышеописанную проблему, способ помощи при парковке и устройство для его осуществления в соответствии с аспектом настоящего изобретения обнаруживают пустые парковочные места вокруг движущегося объекта и определяют, удовлетворяют ли обнаруженные пустые парковочные места условию отображения для осуществления отображения первых вспомогательных изображений, указывающих положения пустых парковочных мест. Кроме того, первые вспомогательные изображения отображают в пустых парковочных местах, не удовлетворяющих условию отображения, когда текущий установленный режим является регулируемым режимом, который позволяет находящемуся в движущемся объекте лицу вручную регулировать цель парковки.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007] Согласно настоящему изобретению можно отображать изображения, указывающие положения пустых парковочных мест, и использовать автоматизированную парковку даже для такой стоянки, на которой парковочные места визуально четко не размечены.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
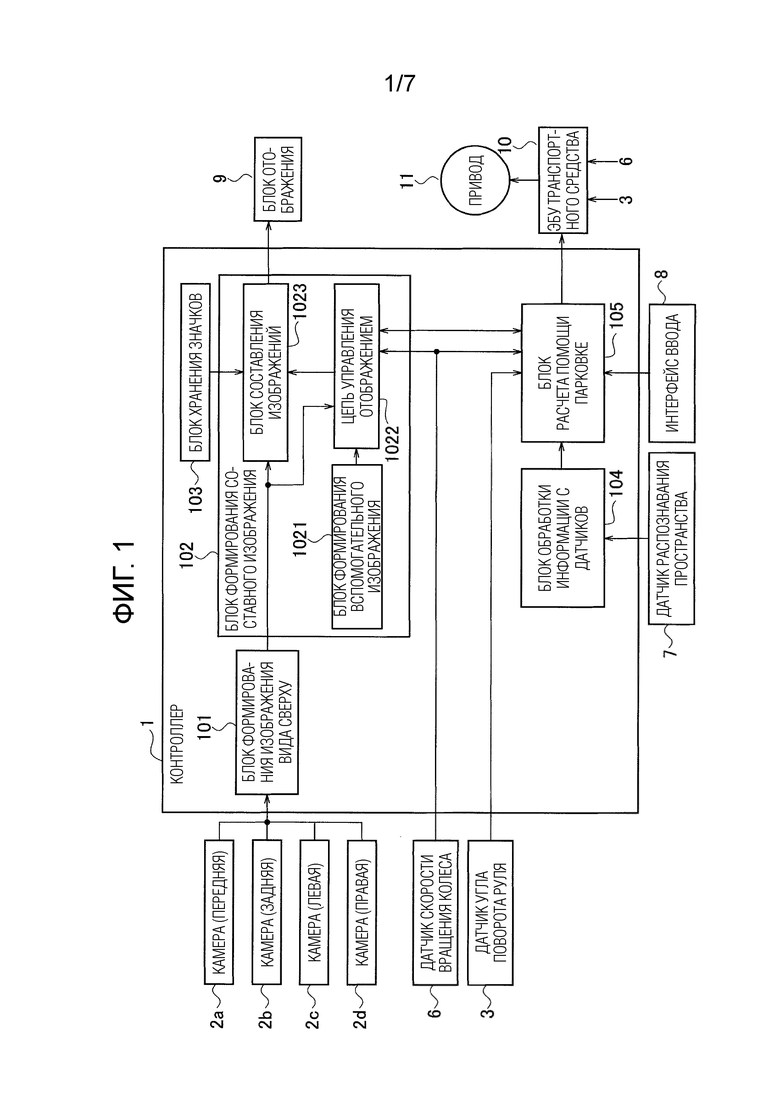
[0008] Фиг.1 является блок–схемой, иллюстрирующей конфигурацию устройства помощи при парковке согласно варианту осуществления настоящего изобретения.
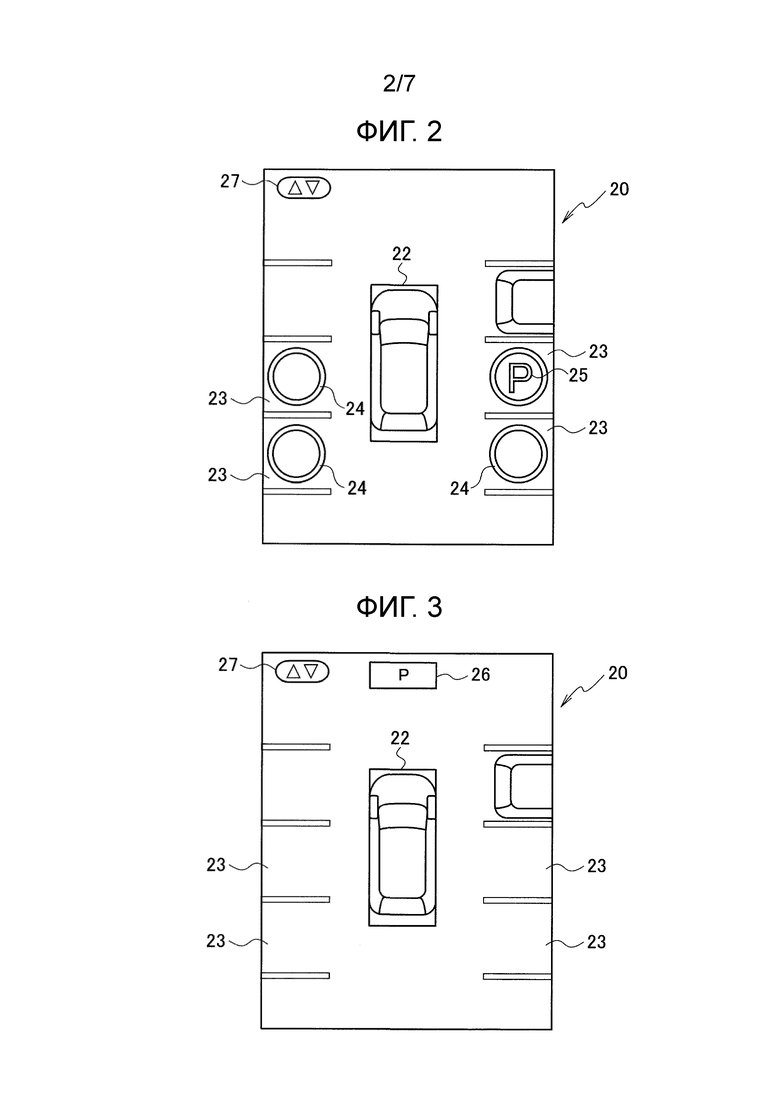
Фиг.2 – схема, иллюстрирующая пример первых вспомогательных изображений, отображаемых устройством помощи при парковке согласно варианту осуществления настоящего изобретения.
Фиг.3 – схема, иллюстрирующая пример второго вспомогательного изображения, отображаемого устройством помощи при парковке согласно варианту осуществления настоящего изобретения.
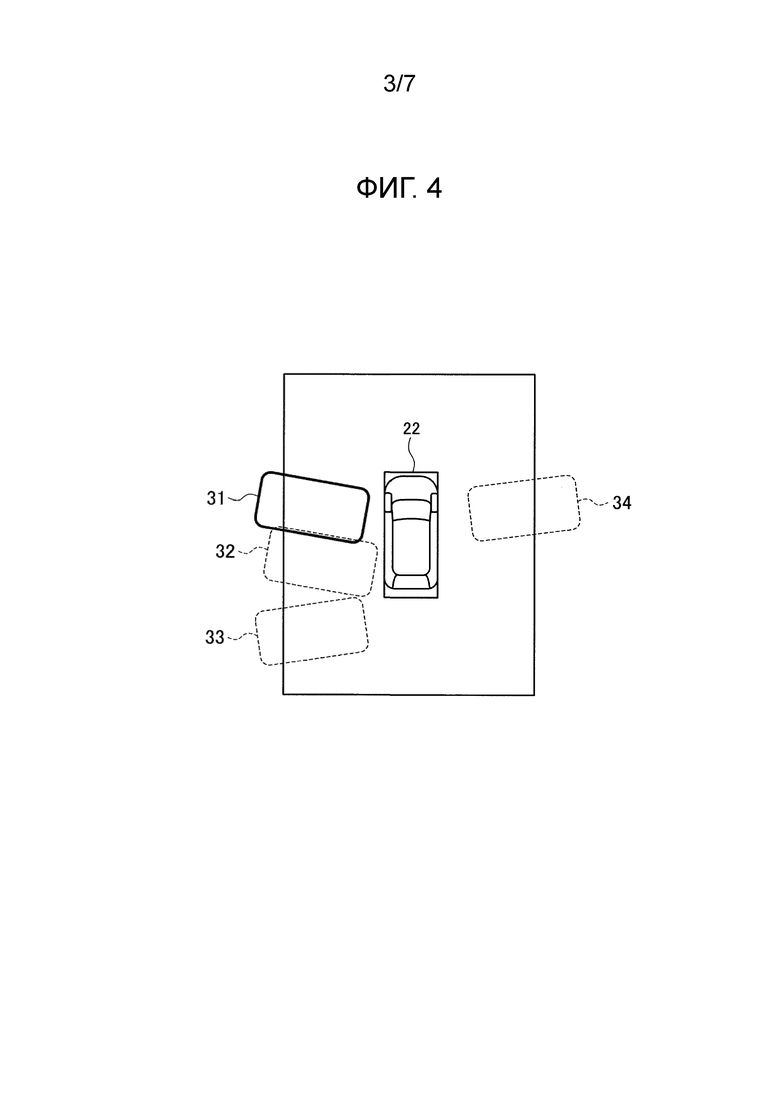
Фиг.4 – схема для описания способа отображения первых вспомогательных изображений в пустых парковочных местах, не соответствующих условию отображения, устройством помощи при парковке согласно варианту осуществления настоящего изобретения.
Фиг.5A – блок–схема последовательности операций, указывающая процедуру обработки задания цели парковки устройством помощи при парковке согласно варианту осуществления настоящего изобретения.
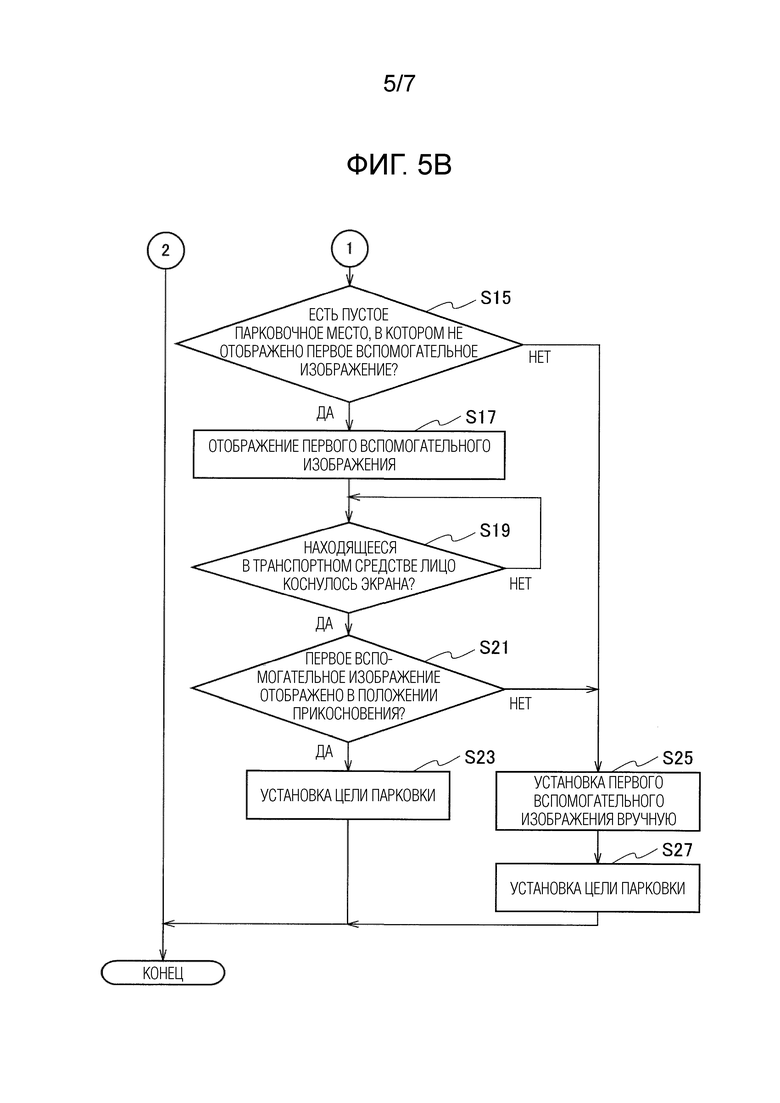
Фиг.5B – блок–схема последовательности операций, указывающая процедуру обработки задания цели парковки устройством помощи при парковке согласно варианту осуществления настоящего изобретения.
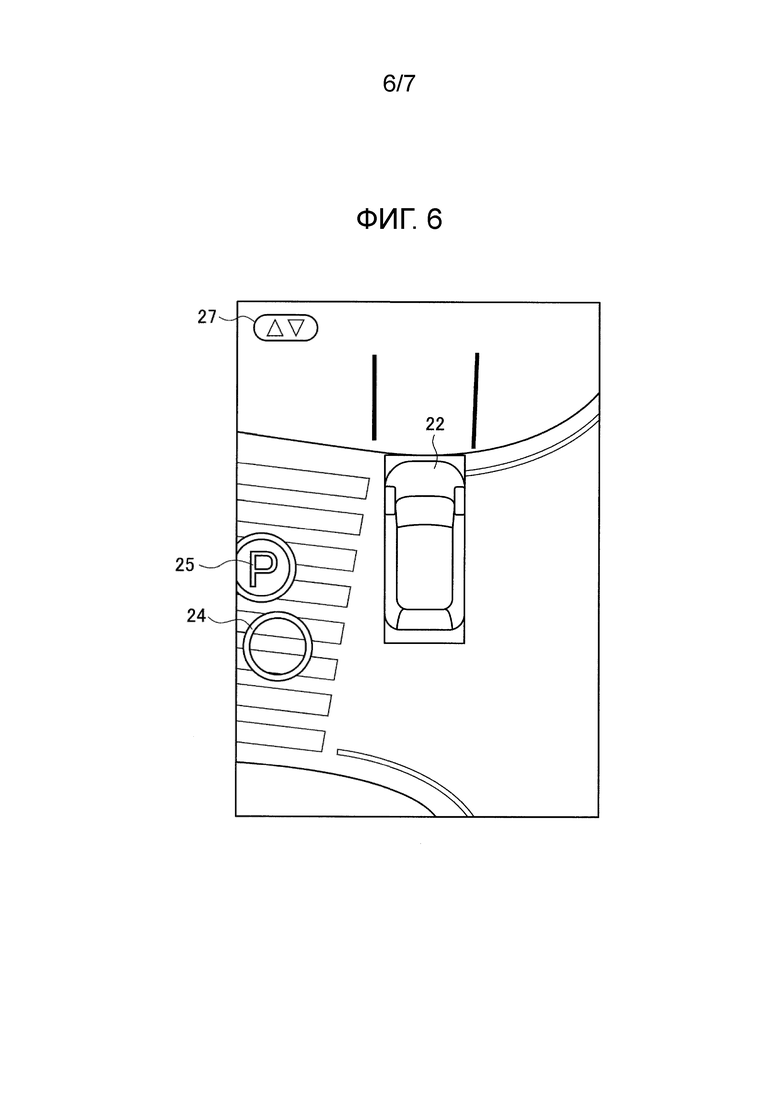
Фиг.6 – схема, иллюстрирующая пример ошибочного отображения, которое происходит в таком месте, в котором парковочные места не четко размечены.
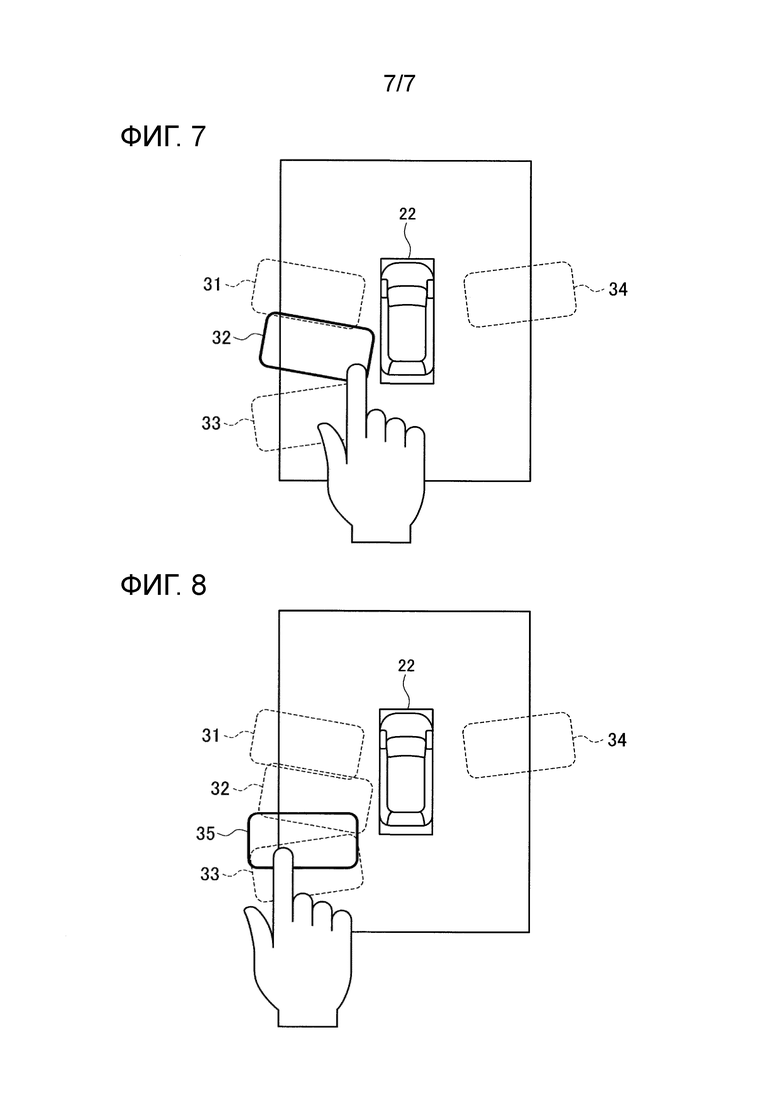
Фиг.7 – схема для описания способа отображения первых вспомогательных изображений в пустых парковочных местах, не удовлетворяющих условию отображения, и установки цели парковки устройством помощи при парковке согласно варианту осуществления настоящего изобретения.
Фиг.8 – схема для описания способа отображения первых вспомогательных изображений вручную находящимся в транспортном средстве лицом и установки цели парковки устройством помощи при парковке согласно варианту осуществления настоящего изобретения.
Описание вариантов осуществления
[0009] Варианты осуществления, к которым применяется настоящее изобретение, описаны ниже со ссылкой на чертежи. В описаниях чертежей одинаковые части обозначены одинаковыми ссылочными позициями, а их описания опущены.
[Конфигурация устройства помощи при парковке]
[0010] На фиг.1 показана блок–схема, иллюстрирующая конфигурацию части транспортного средства, на котором установлено устройство помощи при парковке согласно варианту осуществления настоящего изобретения. Транспортное средство включает в себя контроллер 1, камеры 2a, 2b, 2c и 2d, датчик 3 угла поворота руля, датчик 6 скорости вращения колеса, датчик 7 распознавания пространства, интерфейс 8 ввода, блок 9 отображения, электронный блок управления (ЭБУ) 10 транспортного средства и привод 11. В этом варианте осуществления парковка означает движение к пустому парковочному месту и остановку на этом пустом парковочном месте. Для автомобиля парковка означает движение к пустому парковочному месту с тем, чтобы припарковать автомобиль на парковочном месте на стоянке, и остановку на этом пустом парковочном месте. В этом варианте осуществления управление помощью при парковке включает в себя управление отображением пустого парковочного места вокруг рассматриваемого транспортного средства (транспортного средства-хозяина) в качестве цели парковки находящемуся в транспортном средстве лицу, управление уведомлением находящегося в транспортном средстве лица о способе операции парковки к цели парковки, управление выполнением автоматизированной парковки, которая автоматически выполняет парковку до цели парковки, и так далее.
[0011] Контроллер 1 включает в себя блок 101 формирования изображения вида сверху, блок 102 формирования составного изображения, блок 103 хранения значков, блок 104 обработки информации с датчиков и блок 105 расчета помощи парковке в виде множественных цепей обработки информации. Блок 102 формирования составного изображения включает в себя блок 1021 формирования вспомогательного изображения, цепь 1022 управления отображением и блок 1023 составления изображений.
[0012] Контроллер 1 включает в себя блок 101 формирования изображения вида сверху и блок 102 формирования составного изображения, составляющие устройство помощи при парковке, и контроллер 1 может быть реализован с использованием микрокомпьютера, включающего в себя центральный процессор (ЦП), память и блок ввода-вывода. На микрокомпьютер устанавливается подлежащая исполнению компьютерная программа для функционирования микрокомпьютера в качестве ЭБУ. Таким образом, микрокомпьютер функционирует как контроллер 1. Хотя описанный здесь пример состоит в том, что контроллер 1 реализован с помощью программного обеспечения, само собой разумеется, что также возможно реализовать контроллер 1 путем подготовки аппаратного обеспечения, предназначенного для выполнения каждой обработки информации, описанной ниже. Управление помощью при парковке в этом варианте осуществления включает в себя управление отображением пустого парковочного места вокруг рассматриваемого транспортного средства в качестве целевого парковочного места находящемуся в транспортном средстве лицу (например, водителю, пассажиру и т.п.), управление уведомлением находящегося в транспортном средстве лица о способе операции парковки в целевом парковочном месте, управление выполнением автоматизированной парковки, которая автоматически выполняет парковку до целевого парковочного места, и т. д.
[0013] Камера 2а установлена на передней стороне транспортного средства для захвата изображения зоны перед транспортным средством. Камера 2b установлена на задней стороне транспортного средства для захвата изображения зоны позади транспортного средства. Камера 2с установлена на левой стороне транспортного средства для захвата изображения зоны слева от транспортного средства. Камера 2d установлена на правой стороне транспортного средства для захвата изображения зоны справа от транспортного средства. Каждая из этих камер расположена ниже крыши транспортного средства.
[0014] Поскольку каждая камера расположена ниже крыши транспортного средства, трудно отображать изображение, фактически снятое сверху транспортного средства. Другими словами, поскольку камера не может захватить изображение транспортного средства, невозможно получить изображение фактического транспортного средства. По этой причине вместо изображения фактического транспортного средства используется описанный ниже значок транспортного средства (имитационное изображение транспортного средства).
[0015] Датчик 3 угла поворота руля обнаруживает угол поворота руля (угол поворота при рулении) транспортного средства, когда транспортное средство паркуется в пустом парковочном месте (или до тех пор, пока парковка не завершена). Датчик 6 скорости вращения колеса рассчитывает скорость вращения (скорость вращения колеса) колес. Скорость транспортного средства определяется на основе скорости вращения колеса.
[0016] Датчик 7 распознавания пространства распознает пространство вокруг транспортного средства. Датчик 7 распознавания пространства представляет собой датчик для обнаружения препятствия, существующего вокруг транспортного средства, и, например, может использоваться лазерный дальномер (ЛДМ). ЛДМ излучает инфракрасное лазерное излучение на целевой объект и измеряет расстояние до целевого объекта на основе интенсивности отраженного излучения. Расстояние до целевого объекта может быть получено в виде информации о облаке точек посредством измерения с помощью ЛДМ, и эта информация о облаке точек выводится в блок 104 обработки информации с датчиков. Датчик 7 распознавания пространства может потребоваться только для определения расстояния до целевого объекта и наличия целевого объекта; таким образом, в качестве другого примера, также можно использовать парктроник с ультразвуковыми волнами, монокулярную камеру и стереокамеру, включающую в себя, например, пару камер.
[0017] Интерфейс 8 ввода представляет собой терминал, через который находящееся в транспортном средстве лицо вводит различные элементы информации о парковке, и в качестве интерфейса 8 ввода может использоваться устройство ввода различных операций и тому подобное, установленное в транспортном средстве, такое как, например, джойстик, рабочий переключатель и сенсорная панель, предусмотренная в блоке 9 отображения.
[0018] Например, в качестве блока 9 отображения могут использоваться жидкокристаллический дисплей для навигации, предусмотренный в салоне транспортного средства, и существующий монитор, прикрепленный к удаленному операционному терминалу.
[0019] На основе изображений окружения транспортного средства, снятых четырьмя камерами 2a–2d, блок 101 формирования изображения вида сверху устанавливает заданную виртуальную точку обзора и плоскость проекции и генерирует изображение обзора сверху транспортного средства вниз (в направление транспортного средства). Поскольку каждая камера не может захватывать изображение транспортного средства, как описано выше, сгенерированное таким образом изображение не включает само транспортное средство. Здесь и далее это изображение называется «изображением вида сверху». Изображение вида сверху, в частности, представляет собой изображение в случае обзора окружения транспортного средства сверху транспортного средства. Способ формирования изображения вида сверху является уже известным методом, поэтому подробное описание опущено. В этом варианте осуществления изображение не обязательно должно быть изображением вида сверху, при условии, что оно является изображением, отображающим окружение транспортного средства (изображением окружения), таким как изображение с высоты птичьего полета. Блок 101 формирования изображения вида сверху может генерировать изображение вида сверху (изображение окружения) посредством приема изображений, снятых камерой, предусмотренной вне транспортного средства или на стоянке, и камерой в другом транспортном средстве, посредством беспроводной связи. В этом варианте осуществления не обязательно должно использоваться имитационное изображение транспортного средства (значок транспортного средства), когда используется изображение, снятое сверху транспортного средства.
[0020] Блок 103 хранения значков заранее хранит значок транспортного средства. Значок транспортного средства должен отображаться в положении транспортного средства на изображении вида сверху.
[0021] Блок 102 формирования составного изображения генерирует составное изображение путем наложения значка и вспомогательного изображения на изображение вида сверху. Ниже описаны блоки, входящие в состав блока 102 формирования составного изображения.
[0022] Блок 1021 формирования вспомогательного изображения формирует (генерирует) вспомогательное изображение для оказания помощи при парковке. Например, блок 1021 формирования вспомогательного изображения формирует первые вспомогательные изображения, указывающие положения пустых парковочных мест, и второе вспомогательное изображение, указывающее на то, что пустое парковочное место обнаружено в положении, отличном от положений пустых мест на изображении вида сверху. Блок 1021 формирования вспомогательного изображения выводит сформированное вспомогательное изображение в цепь 1022 управления отображением.
[0023] Цепь 1022 управления отображением получает изображение вида сверху из блока 101 формирования изображения вида сверху, ищет пустые парковочные места вокруг рассматриваемого транспортного средства и накладывает и отображает первые вспомогательные изображения в положениях найденных пустых парковочных мест. Соответственно, первые вспомогательные изображения являются изображениями, указывающими положения пустых парковочных мест. Как только находящееся в транспортном средстве лицо выбирает одно из отображаемых первых вспомогательных изображений через интерфейс 8 ввода, цепь 1022 управления отображением устанавливает целевое парковочное место в положении того пустого парковочного места, в котором отображено первое вспомогательное изображение.
[0024] Цепь 1022 управления отображением выполняет поиск пустых парковочных мест при выполнении обработки изображения в отношении полученного изображения вида сверху и определяет, удовлетворяют ли найденные пустые парковочные места условию отображения для осуществления отображения первых вспомогательных изображений. Метод определения того, удовлетворяется ли условие отображения, включает в себя получение коэффициента достоверности для каждого из пустых парковочных мест и определение того, является ли коэффициент достоверности более высоким, чем заданное опорное значение.
[0025] «Коэффициент достоверности» парковочного места представляет собой числовое значение, которое указывает, насколько вероятно, что данное парковочное место является пустым парковочным местом. Коэффициент достоверности рассчитывают на основе положения и ориентации пустого парковочного места, ориентации и положения пустого парковочного места относительно примыкающей к нему дороги, точности обнаружения линий разметки пустого парковочного места и тому подобного, обнаруженных на изображении вида сверху. Чем выше точность обнаружения линий разметки, таких как обнаруживаемые белые линии, тем выше коэффициент достоверности, а чем ниже точность обнаружения линий разметки, тем ниже коэффициент достоверности. Например, коэффициент достоверности низок, когда ограничивающие парковочное место линии разметки обнаружены частично, когда часть линий разметки не может быть обнаружена из–за закрытия препятствием, таким как другое транспортное средство, или когда полностью все линии разметки или их часть не могут быть распознаны из–за размытых бликов или смятых теней изображения.
[0026] Цепь 1022 управления отображением определяет, что условие отображения для осуществления отображения первого вспомогательного изображения удовлетворяется, когда коэффициент достоверности выше, чем заданное опорное значение, и определяет, что условие отображения для осуществления отображения первого вспомогательного изображения не удовлетворяется, когда коэффициент достоверности равен или ниже, чем заданное опорное значение. Следовательно, первое вспомогательное изображение накладывается и отображается в положении пустого парковочного места, которое определено как удовлетворяющее условию отображения. При определении того, удовлетворяется ли условие отображения, выполняемом цепью 1022 управления отображением, не требуется обязательно использовать коэффициент достоверности, и, например, может быть определено, что условие отображения удовлетворяется, когда имеется пустое парковочное место, позволяющее легко припарковаться, что определяется на основе легкости парковки в этом пустом парковочном месте (продолжительность времени парковки, маршрут парковки и т.п.). Кроме того, также может быть определено, что условие отображения удовлетворяется, когда размер пустого парковочного места больше, чем заданный размер, когда расстояние между пустым парковочным местом и рассматриваемым транспортным средством меньше заданного расстояния, когда ночью расстояние между пустым парковочным местом и уличным фонарем короче заданного расстояния, и т.п.
[0027] Теперь со ссылкой на фиг.2 описан способ отображения первого вспомогательного изображения цепью 1022 управления отображением. Фиг.2 – сцена, в которой рассматриваемое транспортное средство ищет пустые парковочные места, и скорость рассматриваемого транспортного средства 22 составляет 0 км/ч. Как показано на фиг.2, когда на изображении 20 окружения обнаружены парковочные места 23 как пустые парковочные места с высоким коэффициентом достоверности, первое вспомогательное изображение 25 накладывается и отображается в том положении, где наиболее рекомендуется парковочное место. Способ определения рекомендуемого парковочного места устанавливается заранее и заключается, например, в том, чтобы рекомендовать парковочное место, близкое к сиденью водителя. Первые вспомогательные изображения 24 накладываются и отображаются в положениях других пустых парковочных мест с высоким коэффициентом достоверности.
[0028] Первые вспомогательные изображения 24 и 25 могут отображаться, когда транспортное средство остановлено. Если рассматриваемое транспортное средство 22 перемещается при выполнении обработки наложением первых вспомогательных изображений 24 и 25 на пустые парковочные места 23, распознаваемые цепью 1022 управления отображением пустые парковочные места 23 на изображении 20 вида сверху также перемещаются. Другими словами, когда цепь 1022 управления отображением распознает пустые парковочные места 23 и первые вспомогательные изображения 24 и 25 собираются наложить на распознанные пустые парковочные места 23, в следующий момент распознанные пустые парковочные места 23 перемещаются. Таким образом, возникает задержка во времени между тем, когда цепь 1022 управления отображением распознает пустые парковочные места 23, и тем, когда первые вспомогательные изображения 24 и 25 накладываются на распознанные пустые парковочные места 23. Из–за этой временной задержки существует риск того, что положения пустых парковочных мест 23 и положения первых вспомогательных изображений 24 и 25 могут быть смещены друг от друга. То есть, когда цепь 1022 управления отображением накладывает первые вспомогательные изображения 24 и 25 на пустые парковочные места 23 на изображении 20 вида сверху в то время, как рассматриваемое транспортное средство 22 движется, существует риск того, что первые вспомогательные изображения 24 и 25 не удается наложить на правильные положения. Такие смещения становятся больше по мере повышения скорости рассматриваемого транспортного средства 22.
[0029] Ввиду этого, когда транспортное средство движется в поисках пустых парковочных мест, отображается второе вспомогательное изображение 26, указывающее на то, что пустые парковочные места обнаруживаются, и первые вспомогательные изображения 24 и 25 удаляются, как показано на фиг.3. Когда пустые парковочные места вокруг рассматриваемого транспортного средства обнаружены в то время, пока рассматриваемое транспортное средство 22 не останавливается, второе вспомогательное изображение 26 отображается в определенном положении, отличном от положений пустых парковочных мест на изображении 20 окружения. Например, на фиг.3 второе вспомогательное изображение 26 отображается вверху в центре изображения 20 окружения. Соответственно, второе вспомогательное изображение 26 не указывает положения обнаруженных пустых парковочных мест, но указывает только, существуют ли пустые парковочные места.
[0030] Таким образом, поскольку второе вспомогательное изображение 26 отображается в положении, отличном от положения пустых парковочных мест 23, пока рассматриваемое транспортное средство 22 движется, находящееся в транспортном средстве лицо может легко узнать о наличии пустых парковочных мест 23, проверив второе вспомогательное изображение 26. Как только транспортное средство остановлено во время отображения второго вспомогательного изображения 26, второе вспомогательное изображение 26 удаляется, и отображение переключается на первые вспомогательные изображения 24 и 25, как показано на фиг.2. Следует отметить, что второе вспомогательное изображение 26 может не быть удалено и может отображаться с менее заметным цветом, таким как серый.
[0031] С другой стороны, когда задается режим регулировки, цепь 1022 управления отображением отображает первые вспомогательные изображения также для пустых парковочных мест, в которых не отображаются первые вспомогательные изображения 24 и 25, поскольку они не удовлетворяют условию отображения. Режим регулировки – это режим, в котором находящееся в рассматриваемом транспортном средстве лицо может регулировать цель парковки вручную, и отображаемые в этом режиме первые вспомогательные изображения являются первыми вспомогательными изображениями 31–34, имеющими иные формы, отличные от форм первых вспомогательных изображений 24 и 25, как показано на фиг.4. На фиг.4 первое вспомогательное изображение 31 отображается и усиливается (обводится) сплошной линией в положении наиболее рекомендуемого пустого парковочного места среди пустых парковочных мест, не удовлетворяющих условию отображения. Пустое парковочное место, имеющее условие, ближайшее к условию отображения, устанавливается как наиболее рекомендуемое пустое парковочное место, и, например, в качестве наиболее рекомендуемого пустого парковочного места устанавливают пустое парковочное место с самым высоким коэффициентом достоверности среди пустых парковочных мест с коэффициентом достоверности, равным или меньшим, чем заданное опорное значение. Первые вспомогательные изображения 32-34 отображаются пунктирными линиями в иных положениях, отличных от наиболее рекомендуемых пустых парковочных мест.
[0032] Кроме того, когда в результате поиска пустые парковочные места не обнаружены, цепь 1022 управления отображением также может выполнять управление, чтобы позволить находящемуся в рассматриваемом транспортном средстве лицу вручную устанавливать первые вспомогательные изображения.
[0033] Блок 1023 составления изображений получает изображение вида сверху, сформированное блоком 101 формирования изображения вида сверху, и считывает значок транспортного средства из блока 103 хранения значков. Блок 1023 составления изображений получает первые вспомогательные изображения и второе вспомогательное изображение из цепи 1022 управления отображением.
[0034] Блок 1023 составления изображений генерирует составное изображение путем наложения значка транспортного средства в положении транспортного средства на изображении вида сверху. Кроме того, блок 1023 составления изображений отображает первые вспомогательные изображения и второе вспомогательное изображение в ответ на управление цепью 1022 управления отображением. Составное изображение затем отображается на блоке 9 отображения как изображение окружения.
[0035] На основе результата, обнаруженного датчиком 7 распознавания пространства, блок 104 обработки информации с датчиков оценивает маршрут движения, по которому движется транспортное средство, оценивает зону парковки, существующую вокруг маршрута движения, и на основе информации о маршруте путешествия и информации о зоне парковки блок 104 обработки информации с датчиков оценивает ту область, в которой может двигаться транспортное средство.
[0036] Блок 105 расчета помощи парковке получает информацию, введенную в интерфейс 8 ввода, данные, полученные блоком 104 обработки информации с датчиков, угол поворота руля, обнаруженный датчиком 3 угла поворота руля, и скорость транспортного средства, обнаруженную датчиком 6 скорости вращения колеса. На основании этих элементов информации блок 105 расчета помощи парковке вычисляет целевое значение скорости транспортного средства для парковки в цель парковки и сигнал управления транспортным средством и выводит сигнал управления транспортным средством в ЭБУ 10 транспортного средства. На основе данных, полученных блоком 104 обработки информации с датчиков, а также угла поворота руля и скорости транспортного средства, блок 105 расчета помощи парковке вычисляет целевой маршрут парковки до цели парковки и выполняет управление рулением, управление ускорением и замедлением, управление положением и управление скоростью транспортного средства так, что текущее положение транспортного средства перемещается по целевому маршруту парковки.
[0037] Исходя из сигнала управления транспортным средством, угла поворота руля и скорости транспортного средства, ЭБУ 10 транспортного средства управляет приведением в действие привода 11 во время вождения, торможения и руления транспортного средства. Автоматизированное вождение в этом варианте осуществления означает, например, состояние, в котором по меньшей мере одним из приводов для торможения (тормоза), ускорения (вождения) и руления (рулевого управления) управляют без манипуляций водителем. При условии, что по меньшей мере одним приводом управляют автоматически, не имеет значения, что управление остальными приводами осуществляется за счет манипуляций водителем. Ручное вождение в этом варианте осуществления означает состояние, в котором водитель управляет необходимыми для движения операциями, такими как, например, торможение, ускорение и руление.
[0038] ЭБУ 10 транспортного средства может дополнительно уменьшить манипуляционную нагрузку на водителя во время операции парковки, выполняя автоматизированное вождение так, что транспортное средство движется по целевому маршруту, установленному блоком 105 расчета помощи парковке.
[0039] Контроллер 1 включает в себя электронные цепи общего назначения, включая микрокомпьютер, микропроцессор и ЦП, а также периферийное устройство, такое как память. Как только исполняется специальная программа, контроллер 1 работает как вышеописанные блок 101 формирования изображения вида сверху, блок 102 формирования составного изображения, блок 104 обработки информации с датчиков и блок 105 расчета помощи парковке. Кроме того, контроллер 1 работает как блок 1021 формирования вспомогательного изображения, цепь 1022 управления отображением и блок 1023 составления изображений. Каждая функция такого контроллера 1 может быть реализована одной или более цепями обработки. Цепи обработки включают в себя запрограммированное устройство обработки, такое как, например, устройство обработки, включающее в себя электрическую цепь, и цепи обработки также включают в себя устройство, такое как специализированные интегральные схемы (ASIC), выполненные с возможностью выполнения функций, описанных в этом варианте осуществления, и схемную часть обычного типа.
[Процедура обработки установки цели парковки]
[0040] Далее процедура обработки установки цели парковки устройством помощи при парковке согласно этому варианту осуществления описана со ссылкой на блок–схемы последовательности операций по фиг.5А и 5В. Обработка установкой цели парковки, показанная на фиг.5, начинается после запуска автоматизированной парковки.
[0041] Как показано на фиг.5, сначала, на этапе S1, после того как начата автоматизированная парковка, цепь 1022 управления отображением ищет пустые парковочные места вокруг рассматриваемого транспортного средства во время движения и обнаруживает пустые парковочные места.
[0042] На этапе S3 цепь 1022 управления отображением определяет, удовлетворяют ли обнаруженные на этапе S1 пустые парковочные места условию отображения для осуществления отображения первого вспомогательного изображения. В частности, цепь 1022 управления отображением вычисляет коэффициент достоверности каждого из обнаруженных пустых парковочных мест и определяет, есть ли пустые парковочные места с более высоким коэффициентом достоверности, чем заданное опорное значение. При наличии пустых парковочных мест с более высоким коэффициентом достоверности, чем заданное опорное значение, процесс переходит к этапу S5, и когда пустых парковочных мест с коэффициентом достоверности выше заданного опорного значения нет, процесс переходит к этапу S13.
[0043] Во–первых, описан случай, когда есть пустые парковочные места с более высоким коэффициентом достоверности, чем заданное опорное значение. На этапе S5 цепь 1022 управления отображением отображает первые вспомогательные изображения в положениях пустых парковочных мест с высоким коэффициентом достоверности. Например, как показано на фиг.2, когда парковочные места 23 обнаружены как пустые парковочные места с высоким коэффициентом достоверности, первое вспомогательное изображение 25 отображается в наиболее рекомендуемом парковочном месте. Способ определения рекомендуемого парковочного места установлен заранее и заключается, например, в том, чтобы рекомендовать парковочное место, близкое к сиденью водителя. Первые вспомогательные изображения 24 отображаются в других пустых парковочных местах с высоким коэффициентом достоверности.
[0044] Можно предотвратить ошибочное отображение первых вспомогательных изображений путем отображения первых вспомогательных изображений только в пустых парковочных местах с высоким коэффициентом достоверности, как описано выше. Например, как показано на фиг.6, когда первые вспомогательные изображения отображаются в пустых парковочных местах с низким коэффициентом достоверности в таком месте, где парковочные места визуально четко не размечены, первые вспомогательные изображения 24 и 25 отображаются по ошибке на пешеходный переход. Кроме того, первые вспомогательные изображения могут отображаться по ошибке в тех парковочных местах, в которых для каждого отображается знак парковки для инвалидов. Чтобы решить эту проблему, первые вспомогательные изображения отображаются только в пустых парковочных местах с высоким коэффициентом достоверности, а значит, вышеописанные ошибочные отображения могут быть предотвращены.
[0045] На этапе S7 цепь 1022 управления отображением определяет, установлен ли режим регулировки. Режим регулировки представляет собой режим, в котором находящееся в транспортном средстве лицо может вручную регулировать цель парковки, и режим регулировки можно установить, касаясь кнопки 27 регулировки, отображаемой на изображении окружения на фиг.2. Когда режим регулировки не устанавливают, процесс переходит к этапу S9, а когда режим регулировки устанавливают, процесс переходит к этапу S15.
[0046] На этапе S9 цепь 1022 управления отображением определяет, выбирает ли находящееся в транспортном средстве лицо какое-либо из первых вспомогательных изображений 24 и 25, отображаемых на изображении окружения, прикосновением. Когда ни одно из них не выбрано, цепь 1022 управления отображением непрерывно определяет, сделан ли выбор, и когда находящееся в транспортном средстве лицо выбирает какое-либо из первых вспомогательных изображений, процесс переходит к этапу S11.
[0047] На этапе S11 цепь 1022 управления отображением устанавливает пустое парковочное место в положении первого вспомогательного изображения, выбранного находящимся в транспортном средстве лицом в качестве цели парковки. Как только цель парковки установлена таким образом, цепь 1022 управления отображением заканчивает обработку установки цели парковки согласно этому варианту осуществления. После этого блок 105 расчета помощи парковке начинает автоматизированную парковку на установленной цели парковки.
[0048] Далее описан случай, где нет пустых парковочных мест с более высоким коэффициентом достоверности, чем заданное опорное значение. На этапе S13 цепь 1022 управления отображением определяет, установлен ли режим регулировки. При касании кнопки 27 регулировки на фиг.2 и установке режима регулировки процесс переходит к этапу S15, а когда режим регулировки не установлен, процесс возвращается к этапу S1.
[0049] На этапе S15 цепь 1022 управления отображением определяет, имеются ли пустые парковочные места, в которых первые вспомогательные изображения не отображаются, поскольку не удовлетворено условие отображения. Хотя обнаруженные на этапе S1 пустые парковочные места есть, первые вспомогательные изображения не отображаются в них, если их коэффициент достоверности равен или ниже, чем заданное опорное значение на этапе S3. Таким образом, определяется, есть ли пустые парковочные места с коэффициентом достоверности, равным или меньшим, чем заданное опорное значение, и первые вспомогательные изображения не отображаются в них. Затем, когда есть пустые парковочные места с коэффициентом достоверности, равным или меньшим, чем заданное опорное значение, процесс переходит к этапу S17, а когда нет пустых парковочных мест с коэффициентом достоверности, равным или меньшим, чем заданное опорное значение, процесс переходит к этапу S25.
[0050] На этапе S17 цепь 1022 управления отображением накладывает и отображает первые вспомогательные изображения в положениях пустых парковочных мест, в которых первые вспомогательные изображения не отображаются, потому что не удовлетворено условие отображения, или пустых парковочных мест с коэффициентом достоверности, равным или меньшим, чем заданное опорное значение. Например, отображаются первые вспомогательные изображения 31–34, как показано на фиг.4. Каждое из первых вспомогательных изображений 31–34 имеет прямоугольную форму, указывающую положение внешней разметки парковочного места, которая отличается от формы каждого из первых вспомогательных изображений 24 и 25 на фиг.2, отображаемых на этапе S5. Среди первых вспомогательных изображений 31–34 первое вспомогательное изображение 31 отображается в наиболее рекомендованном пустом парковочном месте из пустых парковочных мест, не удовлетворяющих условию отображения, и первое вспомогательное изображение 31 отображается сплошными линиями и, кроме того, отображается заметным цветом, таким как красный, чтобы подчеркнуть его. Например, пустое парковочное место, ближайшее к сиденью водителя, может быть установлено в качестве рекомендуемого пустого парковочного места, или же пустое парковочное место, имеющее условие, ближайшее к условию отображения, или пустое парковочное место с самым высоким коэффициентом достоверности среди пустых парковочных мест с коэффициентом достоверности, равным или меньшим, чем заданное опорное значение, могут быть установлены в качестве рекомендуемого пустого парковочного места. Между тем, первые вспомогательные изображения 32–34 отображаются в положениях других пустых парковочных мест, отличных от наиболее рекомендуемого пустого парковочного места, и отображаются пунктирными линиями.
[0051] Как описано выше, можно установить цель парковки, отобразив первые вспомогательные изображения в тех положениях пустых парковочных мест, в которых первые вспомогательные изображения не отображаются из–за низкого коэффициента достоверности, и выбирая одно из отображаемых первых вспомогательных изображений. Это позволяет использовать стоянку, на которой парковочные места визуально обозначены не четко.
[0052] Когда первые вспомогательные изображения отображаются в пустых парковочных местах с низким коэффициентом достоверности, белые линии пешеходного перехода могут быть обнаружены по ошибке в качестве белых линий пустых парковочных мест, и может быть сделано ошибочное отображение, как показано на фиг.6. Однако, поскольку в этом варианте осуществления первые вспомогательные изображения отображаются в пустых парковочных местах с низким коэффициентом достоверности только в режиме регулировки, находящееся в транспортном средстве лицо может легко распознать разницу между пустыми парковочными местами с низким коэффициентом достоверности и пустыми парковочными местами с высоким коэффициентом достоверности.
[0053] Кроме того, поскольку формы первых вспомогательных изображений 24 и 25, отображаемых в пустых парковочных местах с высоким коэффициентом достоверности, отличаются от форм первых вспомогательных изображений 31–34, отображаемых в пустых парковочных местах с низким коэффициентом достоверности, находящееся в транспортном средстве лицо можно легко распознать разницу коэффициента достоверности между пустыми парковочными местами. В частности, когда процесс проходит от этапа S7 до этапа S17, первые вспомогательные изображения 24 и 25, отображаемые в пустых парковочных местах с высоким коэффициентом достоверности, и первые вспомогательные изображения 31–34, отображаемые в пустых парковочных местах с низким коэффициентом достоверности, отображаются одновременно. Следовательно, находящееся в транспортном средстве лицо может легко распознать разницу коэффициента достоверности между пустыми парковочными местами.
[0054] На этапе S19 цепь 1022 управления отображением определяет, касается ли находящееся в транспортном средстве лицо экрана дисплея, проиллюстрированного на фиг.4, и когда находящееся в транспортном средстве лицо не касается экрана дисплея, цепь 1022 управления отображением непрерывно определяет, выполнено ли касание. Как только находящееся в транспортном средстве лицо коснулось экрана дисплея, процесс переходит к этапу S21.
[0055] На этапе S21 цепь 1022 управления отображением определяет, отображается ли первое вспомогательное изображение в том положении на изображении на экране, которого коснулось находящееся в транспортном средстве лицо на этапе S19. Как проиллюстрировано на фиг.7, когда первое вспомогательное изображение отображается в том положении, которого коснулось находящееся в транспортном средстве лицо, процесс переходит к этапу S23, а когда первое вспомогательное изображение не отображается в том положении, которого касалось находящееся в транспортном средстве лицо, процесс переходит к этапу S25.
[0056] На этапе S23 цепь 1022 управления отображением устанавливает пустое парковочное место в положение первого вспомогательного изображения, выбранного находящимся в транспортном средстве лицом в качестве цели парковки. Например, в случае фиг.7, в качестве цели парковки устанавливается положение первого вспомогательного изображения 32. Цель парковки отображается сплошными линиями и, кроме того, отображается заметным цветом, например красным, чтобы подчеркнуть его. Как только цель парковки установлена таким образом, цепь 1022 управления отображением заканчивает обработку установки цели парковки согласно этому варианту осуществления. После этого блок 105 расчета помощи парковке начинает автоматизированную парковку на установленной цели парковки.
[0057] Далее описывается случай, когда первое вспомогательное изображение устанавливается вручную находящимся в транспортном средстве лицом. Если на этапе S15 нет пустых парковочных мест, в которых первые вспомогательные изображения не отображаются, поскольку коэффициент достоверности равен или ниже, чем заданное опорное значение, находящееся в транспортном средстве лицо устанавливает первое вспомогательное изображение вручную на этапе S25. Этот случай является тем случаем, когда при поиске не обнаруживаются пустые парковочные места, поскольку на этапе S3 нет пустых парковочных мест с более высоким коэффициентом достоверности, чем опорное значение, а также на этапе S15 нет пустых парковочных мест с коэффициентом достоверности, равным или меньшим, чем опорное значение. Также в случае, когда на этапе S21 первое вспомогательное изображение не отображается в том положении на экране дисплея, которого коснулось находящееся в транспортном средстве лицо, находящееся в транспортном средстве лицо устанавливает первое вспомогательное изображение вручную на этапе S25. На этапе S25 цепь 1022 управления отображением устанавливает первое вспомогательное изображение 35 в то положение, которого коснулось находящееся в транспортном средстве лицо, как показано на фиг.8. Первое вспомогательное изображение 35 отображается сплошными линиями и, кроме того, отображается заметным цветом, таким как красный, чтобы подчеркнуть его.
[0058] На этапе S27 цепь 1022 управления отображением устанавливает положение первого вспомогательного изображения, установленного находящимся в транспортном средстве лицом в качестве цели парковки. Например, в случае фиг.8, в качестве цели парковки устанавливается положение первого вспомогательного изображения 35. Как только цель парковки установлена таким образом, цепь 1022 управления отображением заканчивает обработку установки цели парковки согласно этому варианту осуществления.
[0059] После этого блок 105 расчета помощи парковке начинает автоматизированную парковку на установленной цели парковки. Блок 105 расчета помощи парковке устанавливает целевой маршрут транспортного средства для перемещения из исходного положения в целевое положение парковки, а также устанавливает целевую скорость транспортного средства и целевой угол поворота руля для того, чтобы транспортное средство двигалось по целевому маршруту. Затем блок 105 расчета помощи парковке вычисляет величину смещения между текущим положением транспортного средства и положением транспортного средства на целевом маршруте, вычисляет величину коррекции, чтобы уменьшить величину смещения, и перемещает транспортное средство к целевому положению парковки при корректировке целевой скорости транспортного средства и целевого угла поворота руля. Таким образом, блок 105 расчета помощи парковке может обеспечить парковку рассматриваемого транспортного средства в целевом положении парковки. Это позволяет припарковать рассматриваемое транспортное средство, используя автоматизированную парковку, даже на стоянке, на которой парковочные места визуально не размечены четко.
[0060] В этом варианте осуществления устройство помощи при парковке смонтировано в целевом транспортном средстве, которое отображает вспомогательные изображения. Однако подобный способ помощи при парковке может быть осуществлен удаленно путем монтажа коммуникационного серверного устройства в целевом транспортном средстве или монтажа устройства помощи при парковке в другом транспортном средстве, отличном от целевого транспортного средства, и передачи и приема требуемой информации и инструкций посредством осуществления связи между серверным устройством или другим транспортным средством и целевым транспортным средством. Связь между серверным устройством и целевым транспортным средством может осуществляться посредством беспроводной связи или связи транспортного средства с дорогой. Связь между другим транспортным средством и целевым транспортным средством может осуществляться посредством так называемой связи между транспортными средствами.
[0061] В этом варианте осуществления используется изображение вида сверху; однако вместо изображения вида сверху может использоваться, например, изображение с высоты птичьего полета или изображение, наблюдаемое наискосок сверху транспортного средства. Другими словами, при условии, что изображение является наблюдаемым сверху изображением окружения (окружающей среды) вокруг транспортного средства, оно не ограничено изображением вида сверху и может быть изображением с высоты птичьего полета. В качестве значка транспортного средства, используемого в этом случае, может использоваться трехмерный значок транспортного средства, если смотреть наискосок сверху транспортного средства. Чтобы отобразить трехмерный значок транспортного средства, могут быть сохранены трехмерные данные значка транспортного средства, и на основе этих трехмерных данных в зависимости от точки обзора может быть сгенерирован значок транспортного средства (двумерные данные) для отображения. Изображение окружения в этом варианте осуществления не обязательно захватывается камерой, предусмотренной в транспортном средстве, и может использоваться изображение, снятое камерой, предусмотренной вокруг парковочного места.
[0062] Более того, этот вариант осуществления не ограничен автомобилем и может применяться ко всему, при условии, что оно является движущимся объектом. В частности, этот вариант осуществления может также применяться к промышленному транспортному средству (например, грузовому автомобилю), самолету, летающему объекту, подводному движущемуся объекту (например, глубоководному зонду и подводной лодке), повернутому маятниковому коперу, роботу–уборщику и тому подобному. В случае самолета, летающего объекта или подводного движущегося объекта, когда самолет, летающий объект или подводный движущийся объект перемещается в пустое пространство и останавливается вместо случая парковки в вышеописанном варианте осуществления, управление может выполняться для отображения вспомогательного изображения в этом пустом пространстве. Приложение может быть сделано аналогичным образом также и в случае с повернутым маятниковым копером или роботом–уборщиком.
[0063] В этом варианте осуществления дисплей для отображения вспомогательных изображений и изображения окружения находящемуся в транспортном средстве лицу необязательно может быть расположен в транспортном средстве (движущемся объекте), и он может быть чем угодно, при условии, что он отображает изображение, например, сотовым телефоном и интеллектуальным прибором.
[Эффект варианта осуществления]
[0064] Как подробно описано выше, в способе помощи при парковке согласно этому варианту осуществления определяют, удовлетворяют ли обнаруженные пустые парковочные места условию отображения для осуществления отображения первых вспомогательных изображений. Первые вспомогательные изображения отображают в пустых парковочных местах, не удовлетворяющих условию отображения, когда текущий установленный режим является регулируемым режимом, который позволяет находящемуся в рассматриваемом транспортном средстве лицу вручную регулировать цель парковки. Это позволяет использовать даже парковочные места, не удовлетворяющие заданному условию отображения, путем отображения первых вспомогательных изображений, указывающих положения пустых парковочных мест.
[0065] Кроме того, в способе помощи при парковке согласно этому варианту осуществления, когда нет пустых парковочных мест, удовлетворяющих условию отображения, первое вспомогательное изображение отображают в пустом парковочном месте, имеющем условие, ближайшее к условию отображения. Это позволяет находящемуся в транспортном средстве лицу легко распознать наиболее рекомендуемое пустое парковочное место среди пустых парковочных мест, не удовлетворяющих условию отображения.
[0066] Кроме того, в способе помощи при парковке согласно этому варианту осуществления, когда пустых парковочных мест не обнаружено, находящееся в рассматриваемом транспортном средстве лицо вручную устанавливает первое вспомогательное изображение в регулируемом режиме. Это позволяет использовать автоматизированную парковку, устанавливая первое вспомогательное изображение и устанавливая цель парковки вручную, даже когда пустые парковочные места не могут быть обнаружены.
[0067] Кроме того, в способе помощи при парковке согласно этому варианту осуществления, когда пустые парковочные места вокруг рассматриваемого транспортного средства обнаруживаются в то время, пока рассматриваемое транспортное средство не останавливается, отображают второе вспомогательное изображение, указывающее, что обнаружены пустые парковочные места, в положении, отличном от положений пустых парковочных мест на изображении окружения. Это позволяет находящемуся в транспортном средстве лицу легко узнавать, есть ли пустые парковочные места, пока рассматриваемое транспортное средство движется и ищет пустые парковочные места.
[0068] Кроме того, в способе помощи при парковке согласно этому варианту осуществления, когда рассматриваемое транспортное средство останавливается в то время, пока отображается второе вспомогательное изображение, переключают второе вспомогательное изображение на первые вспомогательные изображения. Это позволяет находящемуся в транспортном средстве лицу легко узнавать положения пустых парковочных мест, существующих вокруг рассматриваемого транспортного средства.
[0069] Кроме того, в способе помощи при парковке согласно этому варианту осуществления, когда обнаруживаются пустые парковочные места вокруг транспортного средства, устанавливают цель парковки для осуществления парковки транспортного средства посредством автоматизированной парковки с использованием первых вспомогательных изображений. Это позволяет использовать автоматизированную парковку путем отображения первых вспомогательных изображений, указывающих положения пустых парковочных мест, когда выполняется помощь при парковке.
[0070] Кроме того, способ помощи при парковке согласно этому варианту осуществления также может применяться в устройстве помощи при парковке и способе помощи при парковке, которые могут выполнять управление автоматизированной парковкой с коррекцией в реальном времени. Коррекция в реальном времени – это управление для корректировки цели парковки, чтобы переместить транспортное средство ближе к цели парковки во время процесса управления парковкой. Например, в случае парковки в пустом парковочном месте, не удовлетворяющем условию отображения в момент времени, когда цель парковки установлена (например, пустом парковочном месте с низким коэффициентом достоверности (когда имеется большое расстояние между целью парковки и транспортным средством при плохих условиях окружающей среды на стоянке (например, идет дождь или ночью), или когда пустое парковочное место окружено припаркованными транспортными средствами или препятствиями (например, столбами или стенами стоянки)), в качестве цели парковки может быть обнаружено положение, чрезвычайно отличающееся от цели парковки, установленной вначале во время процесса парковки. Это может привести к быстрому изменению целевого значения, быстрому увеличению отклонения между целевым значением и текущим значением и быстрому увеличению величины управления, а значит, поведение транспортного средства может быть нестабильным, при управлении парковкой на пустое парковочное место с низким коэффициентом достоверности.
[0071] Чтобы решить эту проблему, во время процесса выполнения управления парковкой на парковочное место, когда выполнима коррекция в реальном времени, целевую величину коррекции для цели парковки при коррекции в реальном времени в случае выполнения управления парковкой на пустое парковочное место, не удовлетворяющее условию отображения, делают меньшей, чем в случае выполнения управления парковкой на пустое парковочное место, удовлетворяющее условию отображения. Это позволяет подавлять коррекцию в реальном времени в пустом парковочном месте, не удовлетворяющем условию отображения, при котором цель парковки при управлении парковкой может быстро изменяться, а значит, можно предотвратить нестабильное поведение транспортного средства.
[0072] В противном случае, во время процесса выполнения управления парковкой на парковочное место, когда выполнима коррекция в реальном времени, коррекцию в реальном времени запрещают в случае выполнения управления парковкой на пустое парковочное место, не удовлетворяющее условию отображения. Это позволяет запретить коррекцию в реальном времени для пустого парковочного места, не удовлетворяющего условию отображения, при котором цель парковки при управлении парковкой может быстро изменяться, а значит, можно предотвратить нестабильное поведение транспортного средства. Хотя описания в этом варианте осуществления нет, коррекция в реальном времени является методом, аналогичным коррекции в реальном времени в методе управления.
[0073] Вышеописанный вариант осуществления является примером настоящего изобретения. Поэтому настоящее изобретение не ограничено вышеописанным вариантом осуществления, и нет необходимости говорить о том, что возможны различные изменения в зависимости от конструкций и т.п. даже для варианта, отличающегося от вышеприведенного варианта осуществления, без отклонения от технической идеи в соответствии с настоящим изобретением.
СПИСОК ССЫЛОЧНЫХ ПОЗИЦИЙ
[0074] 1 – Контроллер
2a–2d – Камера
3 – Датчик угла поворота руля
6 – Датчик скорости вращения колеса
7 – Датчик распознавания пространства
8 – Интерфейс ввода
9 – Блок отображения
10 – ЭБУ транспортного средства
11 – Привод
101 – Блок формирования изображения вида сверху
102 – Блок формирования составного изображения
103 – Блок хранения значков
104 – Блок обработки информации с датчиков
105 – Блок расчета помощи парковке
1021 – Блок формирования вспомогательного изображения
1022 – Цепь управления отображением
1023 – Блок составления изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2729330C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2737641C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2017 |
|
RU2734740C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2019 |
|
RU2804496C1 |
| СПОСОБ ПОМОЩИ ПРИ ПАРКОВКЕ И УСТРОЙСТВО ПОМОЩИ ПРИ ПАРКОВКЕ | 2016 |
|
RU2714656C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2740661C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2735340C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2738780C1 |
| СПОСОБ УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2742530C1 |
| СПОСОБ ПОМОЩИ ПАРКОВКИ ДЛЯ УСТРОЙСТВА УПРАВЛЕНИЯ ПАРКОВКОЙ И УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВКОЙ | 2017 |
|
RU2741680C1 |

Изобретение относится к способу помощи при парковке и устройству помощи при парковке. Способ помощи при парковке содержит определение того, удовлетворяет ли обнаруженное пустое парковочное место условию отображения для осуществления отображения первого вспомогательного изображения, и осуществление отображения первого вспомогательного изображения в пустом парковочном месте, не удовлетворяющем условию отображения, когда текущий установленный режим является регулируемым режимом. При этом вид отображения первого вспомогательного изображения, отображаемого в пустом парковочном месте, имеющем условие, близкое к условию отображения, из пустых парковочных мест, не удовлетворяющих условию отображения, отличается от вида отображения первого вспомогательного изображения, отображаемого в пустом парковочном месте, имеющем условие, далекое от условия отображения. Устройство помощи при парковке, которое обнаруживает пустое парковочное место вокруг движущегося объекта, отображает первое вспомогательное изображение, указывающее положение пустого парковочного места на изображении окружения, наблюдаемом сверху движущегося объекта, и устанавливает цель парковки с использованием отображаемого первого вспомогательного изображения. Достигается своевременное определение свободного парковочного места. 2 н. и 7 з.п. ф-лы, 9 ил.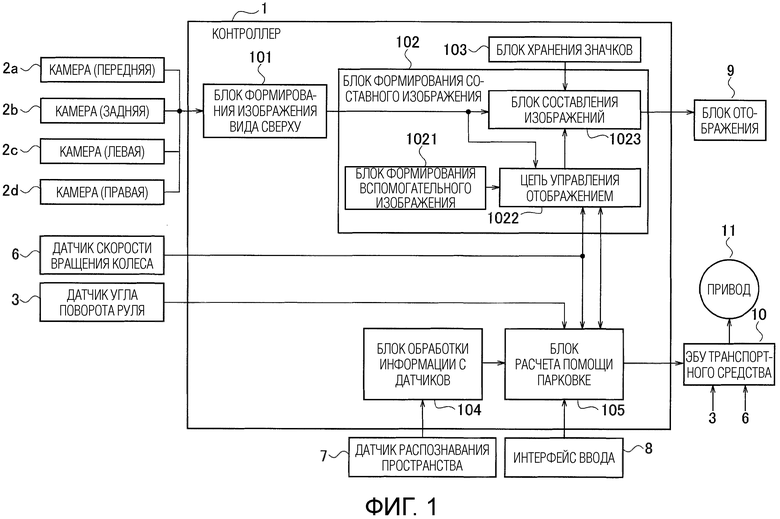
1. Способ помощи при парковке для устройства помощи при парковке, которое обнаруживает пустое парковочное место вокруг движущегося объекта, отображает первое вспомогательное изображение, указывающее положение пустого парковочного места на изображении окружения, наблюдаемом сверху движущегося объекта, и устанавливает цель парковки с использованием отображаемого первого вспомогательного изображения, содержащий:
определение того, удовлетворяет ли обнаруженное пустое парковочное место условию отображения для осуществления отображения первого вспомогательного изображения; и
осуществление отображения первого вспомогательного изображения в пустом парковочном месте, не удовлетворяющем условию отображения, когда текущий установленный режим является регулируемым режимом, который позволяет находящемуся в движущемся объекте лицу вручную регулировать цель парковки,
при этом вид отображения первого вспомогательного изображения, отображаемого в пустом парковочном месте, имеющем условие, близкое к условию отображения, из пустых парковочных мест, не удовлетворяющих условию отображения, отличается от вида отображения первого вспомогательного изображения, отображаемого в пустом парковочном месте, имеющем условие, далекое от условия отображения.
2. Способ помощи при парковке по п.1, в котором,
когда нет пустого парковочного места, удовлетворяющего условию отображения, первое вспомогательное изображение отображают в пустом парковочном месте, имеющем условие, ближайшее к условию отображения.
3. Способ помощи при парковке по п.1, в котором,
когда пустое парковочное место не обнаружено, находящееся в движущемся объекте лицо устанавливает первое вспомогательное изображение вручную в регулируемом режиме.
4. Способ помощи при парковке по любому из пп.1–3, дополнительно содержащий:
когда пустое парковочное место вокруг движущегося объекта обнаружено в то время, как движущийся объект не останавливается, осуществление отображения второго вспомогательного изображения, указывающего, что пустое парковочное место обнаружено в положении, отличном от положения пустого парковочного места на изображении окружения.
5. Способ помощи при парковке по п.4, в котором,
когда движущийся объект остановился в то время, как отображается второе вспомогательное изображение, второе вспомогательное изображение переключают на первое вспомогательное изображение.
6. Способ помощи при парковке по любому из пп.1–5, в котором,
когда обнаружено пустое парковочное место вокруг движущегося объекта, цель парковки для парковки движущегося объекта посредством автоматизированной парковки устанавливают с использованием первого вспомогательного изображения.
7. Способ помощи при парковке по любому из пп.1–6, в котором
во время процесса выполнения управления парковкой на парковочное место, когда выполнима коррекция в реальном времени для корректировки цели парковки при управлении парковкой, целевую величину коррекции цели парковки при коррекции в реальном времени в случае выполнения управления парковкой на пустое парковочное место, не удовлетворяющее условию отображения, делают меньшей, чем в случае выполнения управления парковкой на пустое парковочное место, удовлетворяющее условию отображения.
8. Способ помощи при парковке по любому из пп.1–6, в котором
во время процесса управления парковкой на парковочное место, когда выполнима коррекция в реальном времени для корректировки цели парковки при управлении парковкой, коррекцию в реальном времени запрещают в случае выполнения управления парковкой на пустое парковочное место, не удовлетворяющее условию отображения.
9. Устройство помощи при парковке, которое обнаруживает пустое парковочное место вокруг движущегося объекта, отображает первое вспомогательное изображение, указывающее положение пустого парковочного места на изображении окружения, наблюдаемом сверху движущегося объекта, и устанавливает цель парковки с использованием отображаемого первого вспомогательного изображения, содержащее:
цепь управления отображением, которая
определяет, удовлетворяет ли обнаруженное пустое парковочное место условию отображения для осуществления отображения первого вспомогательного изображения, и
отображает первое вспомогательное изображение в пустом парковочном месте, не удовлетворяющем условию отображения, когда текущий установленный режим является регулируемым режимом, который позволяет находящемуся в движущемся объекте лицу вручную регулировать цель парковки,
при этом цепь управления отображением отображает первое вспомогательное изображение так, что вид отображения первого вспомогательного изображения, отображаемого в пустом парковочном месте, имеющем условие, близкое к условию отображения, из пустых парковочных мест, не удовлетворяющих условию отображения, отличается от вида отображения первого вспомогательного изображения, отображаемого в пустом парковочном месте, имеющем условие, далекое от условия отображения.
| WO 2017068698 A1, 27.04.2017 | |||
| WO 2017068701 A1, 27.04.2017 | |||
| JP 2014004904 A, 16.01.2014 | |||
| JP 2008096362 A, 24.04.2008. |

