ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка испрашивает преимущество и приоритет согласно заявке на патент США №14/049430, поданной 9 октября 2013, содержание которой полностью включено в настоящую заявку посредством ссылки.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники, к которой относится изобретение
Настоящее изобретение в целом относится к способам направленного бурения, в частности к способам прохождения пласта с использованием системы обратной связи со скважинным процессором без обращения к наземному процессору. Краткое описание известного уровня техники
Скважины обычно пробуривают колонной бурильных труб, включающей трубчатый элемент с буровым ставом (также называемым компоновкой низа бурильной колонны или "КНБК") и буровым долотом, прикрепленным к его нижней части. Колонна бурильных труб направляется или проходит сквозь пласт путем изменения ориентации бурового долота при бурении. В целом при управлении колонной бурильных труб используются различные инклинометрические измерения, дающие информацию, относящуюся к текущему местоположению и ориентации бурового долота. Для данных измерений используются скважинные датчики, но они не дают полной информации, необходимой для направленного бурения, такой как позиция бурового долота в пласте. Данные этих измерений, поэтому передаются в процессор, находящийся на поверхности. Наземный процессор использует данную дополнительную информацию и определяет необходимое управляющее воздействие на буровое долото. Наземный процессор затем посылает в скважину сигнал управления буровым долотом. Увеличение протяженности скважины и ее глубины, задержка по времени и ухудшение качества данных при передаче ограничивают применимость данного способа бурения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В общем, настоящее изобретение описывает способ бурения скважины, включающий в себя: определение протяженности скважины от ее наземного расположения до бурового долота на забойном конце колонны бурильных труб в скважине; измерение азимутального угла и угла наклона бурового долота; и использование скважинного процессора для определения позиции и ориентации бурового долота, исходя из определенной протяженности, азимутального угла и угла наклона, и изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота при определении избранной траектории бурения скважины.
Настоящее изобретение также относится к системе бурения скважины, системе, включающей в себя: колонну бурильных труб с бурильным долотом на забойном конце; задающее устройство скважинного тактового импульса на забойном конце бурильной колонны, записывающее время прибытия на забойный конец звукового импульса, генерированного в колонне бурильных труб на поверхности; скважинный процессор для определения длины колонны бурильных труб, исходя из зарегистрированного времени прибытия, определения позиции и ориентации бурового долота, исходя из определенной протяженности, определенного азимутального угла и угла наклона, и изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота при определении избранной траектории бурения скважины.
Настоящее изобретение также относится к устройству бурения, включающему в себя: буровое долото на забойном конце колонны бурильных труб в скважине; приемник на забойном конце колонны бурильных труб, принимающий звуковой импульс, сгенерированный в колонне бурильных труб на поверхности; задающее устройство скважинного тактового импульса, генерирующее временную метку при приеме звукового импульса скважинным приемником; и скважинный процессор для: определения длины колонны бурильных труб с использованием временной метки, определения позиции и ориентации бурового долота исходя из определенной протяженности, определенного азимутального угла и определенного угла наклона бурового долота, и изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота при определении избранной траектории бурения скважины.
Более конкретно, в настоящем изобретении предлагается способ бурения скважины, включающий: генерирование, посредством расположенного на поверхности передатчика звуковых колебаний, разнесенных друг от друга на определенный интервал звуковых импульсов в расположенной в скважине колонне бурильных труб, которая имеет отражатели звука и акустический импеданс, а также буровое долото на забойном конце; задание, посредством расположенного на поверхности генератора тактового импульса, моментов времени для передатчика звуковых колебаний, в которые генерируются звуковые импульсы; регистрацию, посредством скважинного генератора тактового импульса, размещенного на забойном конце колонны труб, моментов времени прибытия звуковых импульсов на забойный конец; и использование скважинного процессора для: вычисления моментов времени прохождения звуковых импульсов с использованием зарегистрированных моментов времени прибытия и без ссылки на моменты времени генерации от расположенного на поверхности генератора тактового импульса; определения длины колонны бурильных труб с использованием вычисленных моментов времени прибытия; корректировки определенной длины с использованием известного акустического импеданса буровой колонны; определения позиции и ориентации бурового долота с использованием скорректированной длины и полученного азимутального угла и угла наклона бурового долота; и изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота и получения выбираемой траектории бурения скважины, которая определяется скважинным процессором с использованием данных измерений пласта полученных на месте в скважине.
В предпочтительных вариантах осуществления предлагаемого способа выбираемая траектория представляет собой, по меньшей мере, одну из: (i) заранее выбранных траекторий, сохраненных в памяти запоминающего устройства скважины; (ii) траекторию, определенную с помощью модели пласта, сохраненную в памяти запоминающего устройства скважины с определенной позицией и ориентацией бурового долота; и (iii) траекторию, определенную скважинным процессором на месте с использованием данных измерений пласта полученных в скважине.
Определение протяженности скважины далее включает определение моментов времени прохождения звуковых импульсов по маршруту скважины от наземного расположения до забойного конца.
Способ также может включать генерирование звуковых импульсов на поверхности, согласно заданному графику; и использование процессора для определения моментов времени прохождения с использованием зарегистрированного времени прибытия и известного графика генерирования звукового импульса. При этом расположенный на поверхности генератор тактового импульса и скважинный генератор тактового импульса предпочтительно синхронизированы между собой. Способ также может включать определение позиции бурового долота с использованием полученных моментов времени прохождения и известной предыдущей позиции и ориентации бурового долота.
Кроме того, способ может включать изменение параметра управления буровым долотом без получения инструкций от оператора или процессора с поверхности.
В настоящем изобретении также предлагается система бурения скважины, включающая в себя: колонну бурильных труб, имеющую отражатели звука и акустический импеданс, а также бурильное долото на забойном конце; расположенный на поверхности передатчик звуковых колебаний для генерирования разнесенных друг от друга на определенный интервал звуковых импульсов в колонне бурильных труб; расположенный на поверхности генератор тактового импульса для задания передатчику звуковых колебаний времени, в которое генерируются звуковые импульсы; скважинный генератор тактового импульса на забойном конце бурильной колонны, выполненный с возможностью регистрации времени прибытия на забойный конец звуковых импульсов; и скважинный процессор, выполненный с возможностью: вычисления моментов времени прохождения звуковых импульсов с использованием зарегистрированных моментов времени прибытия и без ссылки на моменты времени генерации от расположенного на поверхности генератора тактового импульса; определения длины колонны бурильных труб с использованием вычисленных моментов времени прибытия; корректировки определенной длины с использованием известного акустического импеданса буровой колонны; определения позиции и ориентации бурового долота с использованием скорректированной длины, полученного азимутального угла и угла наклона бурового долота; и изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота для получения выбираемой траектории скважины, определяемой скважинным процессором с использованием данных измерений пласта полученных на месте в скважине.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Для лучшего понимания сделаны ссылки на следующее подробное описание, которое следует рассматривать совместно с прилагаемыми чертежами, на которых одинаковые позиции, как правило, обозначены одинаковыми цифрами.
На РИС. 1 представлено схематическое изображение примерной системы бурения, включающей в себя в себя колонну бурильных труб с буровым ставом или компоновкой низа бурильной колонны, прикрепленных к ее нижней части.
На РИС. 2 представлено схематическое изображение колонны бурильных труб с различными устройствами для определения местоположения бурового става и/или бурового долота в скважине и/или пласте.
На РИС. 3 представлены генерированные и принятые последовательности импульсов, используемые для определения позиций бурового долота колонны бурильных труб в скважине.
На РИС. 4 представлено схематическое изображение секции бурильной колонны, включающей различные элементы, используемые для управления навигацией колонны бурильных труб с использованием способов, описанных здесь.
На РИС. 5 представлен пример вычисленных траекторий, которые могут возникнуть при бурении скважины с использованием способов, описанных здесь.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к способам и системам направленного бурения скважины. Устройство включает в себя: скважинный процессор, определяющий ориентацию и позицию бурового долота и/или бурового става на колонне бурильных труб в скважине и изменяющий параметр управления буровым долотом для получения избранной траектории бурения для колонны бурильных труб. В одном варианте осуществления скважинный процессор выполняет эти действия без взаимодействия с наземным процессором. Настоящее изобретение восприимчиво к различным вариантам осуществления. На чертежах показаны, а в документе описаны конкретные варианты осуществления настоящего изобретения с пониманием того, что данное описание должно рассматриваться как иллюстративное и не предназначено для ограничения объема данного изобретения.
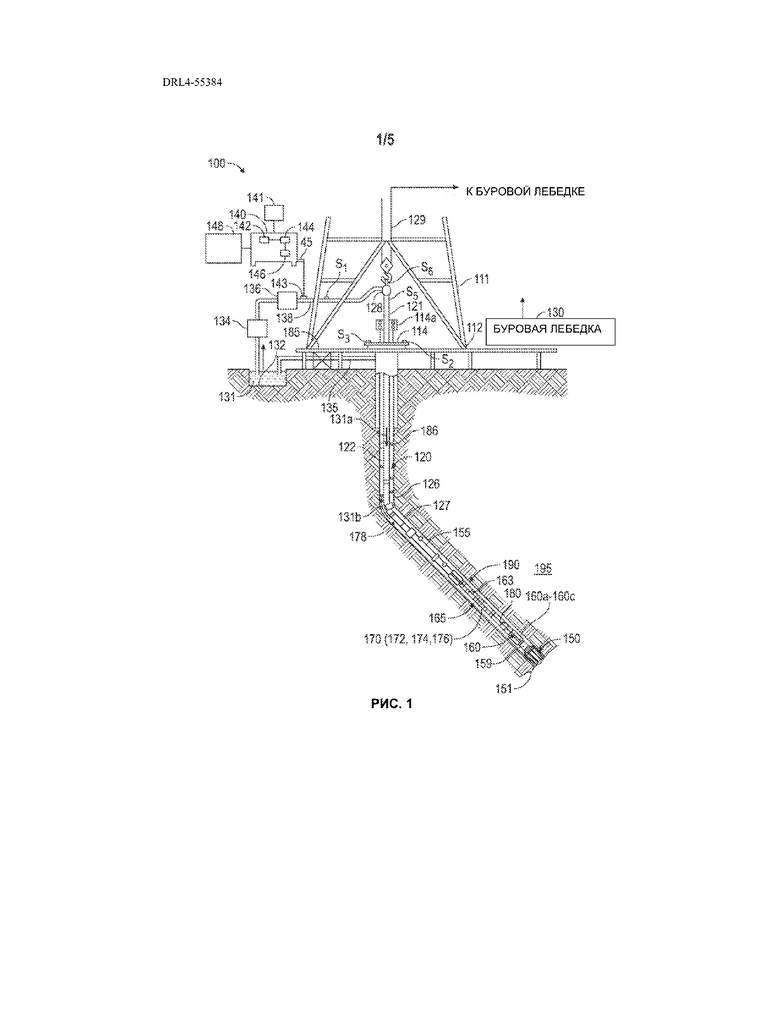
На РИС. 1 представлено схематическое изображение примерной системы бурения 100, включающей в себя в себя колонну бурильных труб 120 с буровым ставом или компоновкой низа бурильной колонны 190, прикрепленных к ее нижней части. Колонна бурильных труб 120 опускается в скважину 126. Система бурения 100 включает в себя: стандартную буровую вышку башенного типа 111, возведенную на платформе или на площадке 112, которые удерживают роторный стол 114, вращаемый первичным приводом, таким как электрический двигатель (не показан), с требуемым числом оборотов. Подъемные трубы (например, сочлененная бурильная труба) 122 с буровым ставом 190, прикрепленным на их нижней части, простираются от поверхности до забоя 151 скважины 126. Буровое долото 150, прикрепленное к буровому ставу 190 и вращаясь, разрушает геологический пласт, буря скважину 126. Колонна бурильных труб 120 соединяется с буровой лебедкой 130 через ведущую буровую штангу 121, вертлюг 128, трос 129 и шкив. Буровая лебедка 130 контролирует нагрузку на долото ("WOB"). Колонна бурильных труб 120 приводится во вращение верхним приводом 114а, а не первичным приводом и роторным столом 114.
В одном варианте осуществления подходящий буровой раствор 131 (также называемый "буровой шлам") от емкости 132, типа приемника бурового шлама, циркулирует под давлением по колонне бурильных труб 120 с помощью насоса 134 бурового раствора. Буровой раствор 131 подается насосом 134 бурового раствора в колонну бурильных труб 120 через поглотитель гидравлического удара 136 и жидкостный трубопровод 138. Буровой раствор 131а из бурильной трубы 122 выпускается в забое скважины 151 через отверстия в буровом долоте 150. Возвращаемый буровой раствор 131b циркулирует вверх по стволу скважины через затрубное пространство или затруб 127 между колонной бурильных труб 120 и стволом скважины 126 и возвращается в приемник бурового шлама 132 через возвратную линию 135 и сито 185, которое удаляет буровой шлам из возвращаемого бурового раствора 131b. Датчик S1 в трубопроводе 138 предоставляет данные о расходе жидкости 131. Наземный датчик крутящего момента S2 и датчик S3, связанные с колонной бурильных труб 120, предоставляют данные о крутящем моменте и числе оборотов колонны бурильных труб 120. Скорость проходки колонны бурильных труб 120 определяется датчиком S5, а датчик S6 определяет вес колонны бурильных труб 120, которая удерживается на крюке.
В некоторых вариантах, буровое долото 150 приводится во вращение буровой трубой 122 с использованием, например, бурового стола 114. Тем не менее, в других вариантах, забойный двигатель 155 (винтовой забойный двигатель), расположенный в буровом ставе 190, вращает одно буровое долото 150 отдельно или в дополнение к вращению колонной бурильных труб.
Наземный блок управления или контроллер 140 принимает сигналы от скважинных датчиков и устройств через датчик 143, размещенный в жидкостном трубопроводе 138, и сигналы отдатчиков S1-S6 и других датчиков, используемых в системе 100, и обрабатывает такие сигналы в соответствии с заданной программой в наземном блоке управления 140. Наземный блок управления 140 отображает требуемые параметры бурения и другую информацию на дисплее/мониторе 141, который используется оператором для управления различными операциями в ходе бурения. Наземный блок управления 140 может представлять собой блок на базе компьютера, включающий в себя процессор 142 (например, микропроцессор), устройство хранения данных 144, типа твердотельного диска, магнитной ленты или жесткого диска, а также одну или несколько компьютерных программ 146 в устройстве хранения данных 144, которые используются процессором 142 для выполнения задач, содержащихся в таких программах. Наземный блок управления 140 может соединяться с блоком дистанционного управления 148. Наземный блок управления 140 обрабатывает данные, относящиеся к различным буровым операциям, данные с датчиков и устройств на поверхности, данные, полученные от скважинных датчиков и устройств и управляет работой одного или нескольких из таких датчиков и устройств.
Буровой став 190 может содержать датчики или устройства оценки пласта (называемые также, датчики измерения во время бурения "MWD" или датчики каротажа во время бурения "LWD") для определения его различных свойств, таких как удельное сопротивление пласта, плотность, пористость, проницаемость, акустические свойства, свойства ядерно-магнитного резонанса, коррозионные свойства жидкостей или пласта, содержания соли в пласте, а также других свойств пласта 195, окружающего буровой став 190. Такие датчики, как правило, известны в данной области техники и для удобства обозначаются здесь одной позицией 165. Такие измерения для оценки пласта часто свидетельствует о литологии пласта, содержании углеводородов, пористости или других параметрах пласта, которые могут указывать на присутствие углеводородов и которые, следовательно, могут использоваться для изменения направления бурения скважины. Буровой став 190 далее включает в себя набор других датчиков и устройств связи 159 для управления и/или определения одной или нескольких функций и свойств бурового става 190 (например, скорости, вибрации, изгибающего момента, ускорения, колебаний, завихрения, подклинки-проворота и т.д.) и рабочих параметров бурения, таких как нагрузка на долото, расход жидкости, давление, температура, скорость проходки, азимут, ориентация отклонителя, вращение бурового долота и т.д. Кроме того, буровой став 190 включает в себя один или несколько геодезических инструментов 163, таких как акселерометры, гироскопы и/или магнитометры, определяющие угол наклона бурового става 190 и/или бурового долота 150 и азимут или угол положения лицевой метки инклинометра бурового става 190 и/или бурового долота 150.
Со ссылкой на РИС. 1, колонна бурильных труб 120 далее включает в себя устройство выработки электроэнергии 178, обеспечивающее электрической энергией датчики 165, устройства 159 и другие приборы. Устройство выработки электроэнергии 178 располагается в буровом ставе 190 или в колонне бурильных труб 120. Буровой став 190 далее включает в себя устройство управления 160 с элементами управления (со ссылкой на элементы приложения усилия) 160а, 160b, 160с, которые могут по отдельности прилагать усилие к скважине 126, направляя буровое долото 150 вдоль любого заданного направления.
Кроме того, колонна бурильных труб 120 может включать в себя скважинный блок управления 170 со скважинным процессором 172, устройство хранения данных 174, типа твердотельного диска, магнитной ленты или жесткого диска, а также одну или несколько компьютерных программ 176 в устройстве хранения данных 174, которые используются скважинным процессором 172 для выполнения задач, содержащихся в таких программах для осуществления способов направленного бурения, раскрытых здесь.
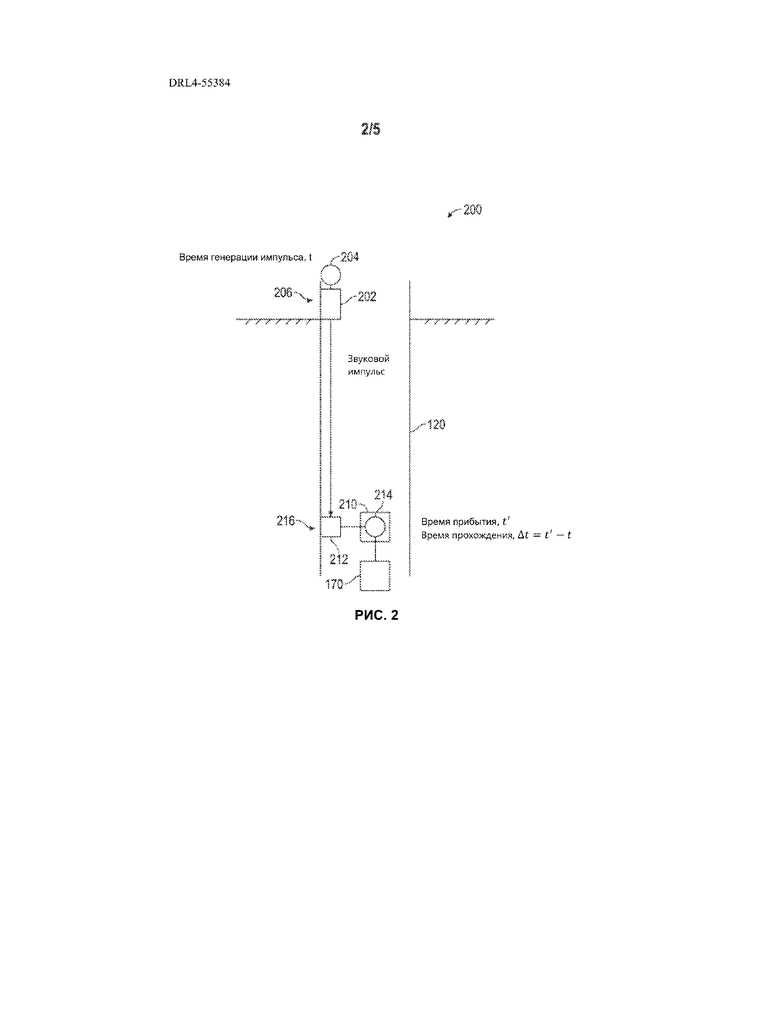
На РИС. 2 представлено схематическое изображение 200 колонны бурильных труб 120 с различными устройствами для определения местоположения бурового става и/или бурового долота в скважине и/или пласте. Звуковой генератор или передатчик звуковых колебаний 202 расположен на поверхности 206, а приемник звуковых колебаний 212 расположен в месте отсчета в скважине 216. Место отсчета в скважине 216 может находиться вблизи бурового става (190, РИС. 1) или бурового долота (150, РИС. 1) или в заданном месте от бурового става (190, РИС. 1) или бурового долота (190, РИС. 1). Передатчик звуковых колебаний 202 соединен с первым генератором тактового импульса 204 (задающим устройством наземного тактового импульса), а приемник звуковых колебаний 212 соединен со вторым генератором тактового импульса 214 (задающим устройством скважинного тактового импульса). Первый генератор тактового импульса 204 и второй генератор тактового импульса 214 синхронизируются до начала бурения, хотя в это время второй генератор тактового импульса 214 находится на поверхности 206. Второй генератор тактового импульса 214 может располагаться внутри устройства контроля температуры 210, предназначенного для контроля температуры второго генератора тактового импульса 214, уменьшая, таким образом, или сводя к минимуму величину температурного сдвига, поскольку второй генератор тактового импульса 214 опускается в место отсчета в скважине 216, подвергающееся воздействию повышенных температур. Второй генератор тактового импульса 214 соединяется со скважинным блоком управления 170.
Передатчик звуковых колебаний 202 генерирует звуковой импульс в колонне бурильных труб 120 в различные моменты времени, разнесенные друг от друга на заданный интервал. В одном варианте осуществления передатчик звуковых колебаний 202 генерирует звуковой импульс ударом по колонне бурильных труб 120. Первый генератор тактового импульса 204 задает момент времени для передатчика звуковых колебаний 202, а передатчик звуковых колебаний 202 генерирует звуковой импульс в выбранное время t. С другой стороны, первый генератор тактового импульса 204 задает сигнал генерации импульса в выбранное время t, чтобы переключить передатчик звуковых колебаний 202 на генерацию звукового импульса. Моменты времени, в которые генерируются акустические импульсы, выбираются предварительно и, как правило, разнесены на выбранный интервал.
Таким образом, передатчик звуковых колебаний 202 генерирует звуковой импульс в момент времени t. Звуковой импульс распространяется по колонне бурильных труб 120 и принимается приемником звуковых колебаний 212. Второй генератор тактового импульса 214 записывает время прибытия t' звукового импульса в приемник звуковых колебаний 212 и передает зарегистрированное время прибытия t' в скважинный блок управления 170. Скважинный блок управления 170 определяет время прохождения звукового импульса между передатчиком звуковых колебаний 202 и приемником звуковых колебаний 212 по формуле:

Время прохождения Δt используется для расчета расстояния между передатчиком звуковых колебаний 202 и приемником звуковых колебаний 212, получая, таким образом, длину колонны бурильных труб 120 и/или протяженность скважины 126. В различных вариантах осуществления время прохождения и известная скорость звука в колонне бурильных труб используются для определения этого расстояния. Известные акустические свойства колонны бурильных труб, такие как акустический импеданс колонны бурильных труб, используются для корректировки расчета расстояния между передатчиком звуковых колебаний 202 и приемником звуковых колебаний 212. Определенное расстояние затем используется для определения позиции бурового долота 150 в пласте.
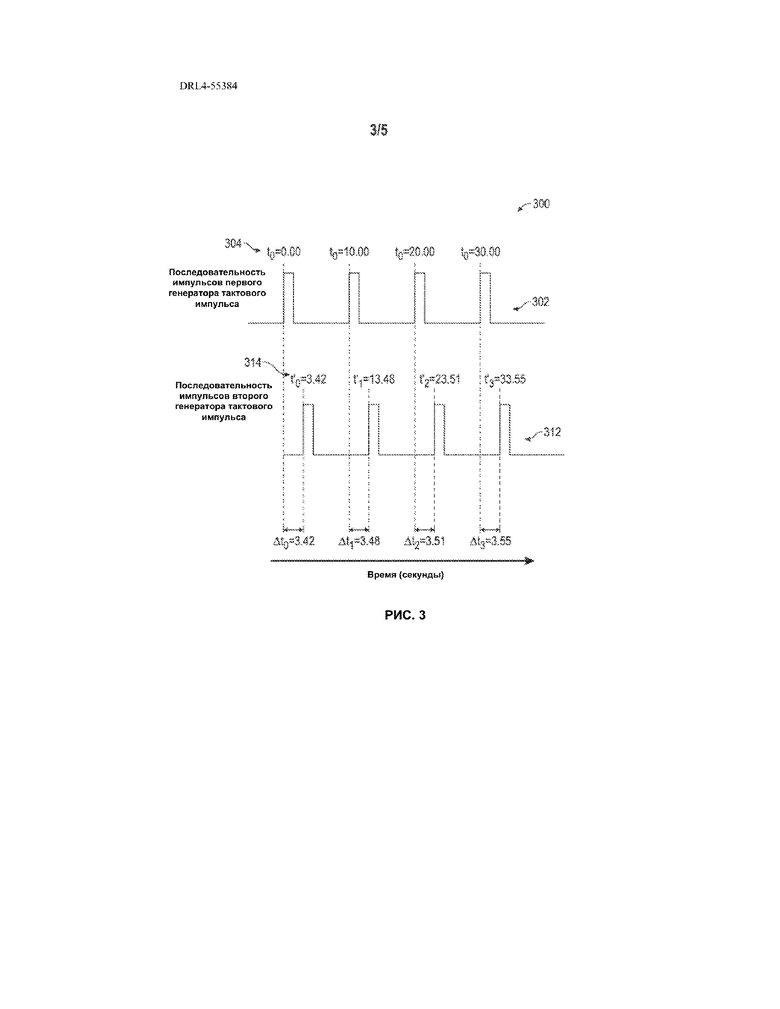
На РИС. 3 представлены генерированные и принятые последовательности импульсов 300, используемые для определения позиции бурового долота колонны бурильных труб в скважине. Звуковые импульсы 302 генерируются передатчиком звуковых колебаний (202, РИС. 2) в моменты времени 304, что отображается первым генератором тактового импульса. В примерной иллюстрации интервал времени между импульсами составляет 10 секунд. Тем не менее, может использоваться любой подходящий интервал времени. В целом, интервал времени достаточно продолжителен для поступления звукового импульса в приемник звуковых колебаний 212 в пределах выбранного интервала времени (то есть до генерации следующего импульса в последовательности), и исчезновения звуковых отражений от различных отражателей в колонне бурильных труб и в скважине. Приемник звуковых колебаний 212 принимает звуковые импульсы и регистрирует время прибытия 314, используя второй генератор тактового импульса 214. В различных вариантах осуществления скважинный блок управления 170 рассчитывает время прохождения звукового импульса без ссылки на моменты времени 304 от первого генератора тактового импульса 204. Вместо этого, используется график генерации импульсов, заложенный в скважинный блок управления 170, вместе со временем прибытия 314 для определения времени прохождения.
Например, первый генератор тактового импульса может генерировать звуковые импульсы 302 каждые 10 секунд. (t0=0,00 секунд, t1=10,00 секунд, t2=20,00 секунд, t3=30,00 секунд). После прохождения через скважину, звуковые импульсы принимаются со временем прибытия (t'0=3,42 секунды, t'1=13,48 секунды, (t'2=23,51 секунды, t'3=33,55 секунды). Полученная разница между этими моментами времени (например, Δt0=3,42 секунды, Δt1=3,48 секунды, Δt2=3,51 секунды, Δt3=3,55 секунды) используется для определения расстояния, пройденного звуковым импульсом, и позиции бурового долота 150 в пласте 195. Скважинный блок управления 170 принимает выбранное время прибытия, например, t'1=13,48 секунды, зная, что сигнал был генерирован передатчиком звуковых колебаний 202 при t1=10 секунд, так как график генерации импульсов для первого генератора тактового импульса 204 хранится в скважинном блоке управления 170, а первый генератор тактового импульса 204 и второй генератор тактового импульса 214 синхронизированы между собой. Как показано на РИС. 3, каждое последующее время прохождения Δt увеличивается, что указывает на перемещение бурового долота в скважине и удалении от передатчика звуковых колебаний 202.
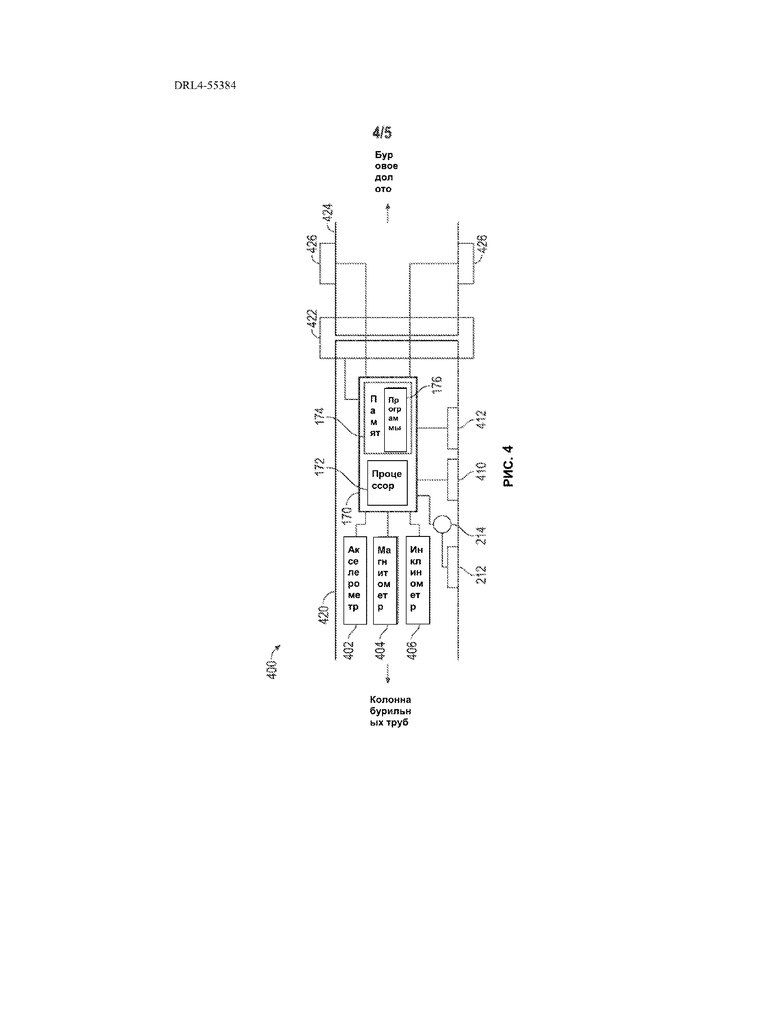
На РИС. 4 представлено схематическое изображение секции 400 колонны бурильных труб, включающей различные элементы, используемые для управления навигацией колонны бурильных труб с использованием способов, описанных здесь. Секция 400 колонны бурильных труб содержит буровое долото (не показано), прикрепленное к нижнему концу, а сама крепится своим верхним концом к трубчатой части колонны бурильных труб. Секция 400 колонны бурильных труб содержит приемник звуковых колебаний 212, второй генератор тактового импульса 214 и скважинный блок управления 170. Скважинный блок управления 170 управления включает в себя скважинный процессор 172 и устройство хранения данных 174, хранящее одну или несколько компьютерных программ 176, которые используются скважинным процессором 172 для выполнения задач, содержащихся в таких программах 176. Моменты времени для второго генератора тактового импульса 214 передаются в скважинный блок управления 170 для определения позиции бурового долота внутри пласта. Различные измерительные приборы, такие как акселерометр 402, магнитометр 404 и инклинометр 406 отправляют данные в скважинный блок управления 170, где определяется ориентация бурового долота, т.е. угол наклона и угол положения лицевой метки инклинометра (азимут).
Секция 400 колонны бурильных труб далее включает в себя забойный двигатель 422 и модуль управления 424. Буровое долото крепится к нижнему концу модуля управления 424. Забойный двигатель 422 поворачивает модуль управления 424 и тем самым направляет буровое долото по азимуту секции 400 колонны бурильных труб. Скважинный блок управления 170 управляет поворотом забойного двигателя 422, задавая нужный азимут или угол положения лицевой метки инклинометра бурового долота. Модуль управления 424 оснащен различными управляющими накладками 426, которые расположены по окружности модуля управления 424. Можно задействовать любое необходимое количество управляющих накладок 426. Каждая управляющая накладка 426 по отдельности друг от друга выдвигается из или убирается в модуль управления 424, прилагая усилие на стенку скважины и изменяя тем самым ориентацию модуля управления 424 и прикрепленного к нему бурового долота. Таким образом, скважинный блок управления 170 управляет углом положения лицевой метки инклинометра и наклоном бурового долота.
Секция 400 колонны бурильных труб включает в себя различные датчики оценки свойств пласта 410, 412, передающие данные в скважинный блок управления 170. Скважинный процессор 172 осуществляет вычисления, используя информацию отдатчиков оценки свойств пласта 410, 412, и выбирает направление дальнейшего бурения, направляя, как описано ниже, буровое долото соответствующим образом.
В одном варианте осуществления, выбранный маршрут направленного бурения может быть запрограммирован в скважинном блоке управления 170 на поверхности, до опускания скважинного блока управления в скважину. Скважинный блок управления 170 использует определенную позицию и ориентацию бурового долота 150 в различные моменты времени в процессе бурения скважины и использует такую определенную позицию и ориентацию для определения фактического маршрута бурения бурового долота 150. При возникновении различия между фактической траекторией бурения и выбранной траекторией бурения скважинный блок управления 170 меняет азимут и/или угол наклона бурового долота, уменьшая или сводя к минимуму различие между фактической траекторией бурения и выбранной траекторией бурения.
На РИС. 5 представлен пример вычисленных траекторий 500, которые могут возникнуть при бурении скважины с использованием способов, описанных здесь. Выбранная или желаемая траектория подразделяется на несколько субтраекторий 502 и 504. Следует отметить, что фактическая траектория может иметь сотни или даже тысячи субтраекторий. В качестве примера показаны лишь две субтраектории. В конце субтраектории 502 нахождение бурового долота ожидается в точке X1, где X1 представляет собой координаты (х, у, z) и имеет ориентацию  которая представляет собой угловые координаты. В связи с этим, ожидаемая позиция бурового долота 150 может быть записана в виде
которая представляет собой угловые координаты. В связи с этим, ожидаемая позиция бурового долота 150 может быть записана в виде  Следовательно, позиция бурового долота 150 в конце субтраектории 502 будет иметь вид
Следовательно, позиция бурового долота 150 в конце субтраектории 502 будет иметь вид  По мере углубления бурового долота в скважину, оно может осуществлять бурение вдоль маршрута 512, обнаруживая себя в позиции
По мере углубления бурового долота в скважину, оно может осуществлять бурение вдоль маршрута 512, обнаруживая себя в позиции  в конце выбранного интервала времени. В это время, приход звукового импульса в скважину указывает позицию с координатами X'1, а инклинометрические измерения используются для получения
в конце выбранного интервала времени. В это время, приход звукового импульса в скважину указывает позицию с координатами X'1, а инклинометрические измерения используются для получения  Таким образом, фактическое состояние
Таким образом, фактическое состояние  можно сравнить с желаемым состоянием
можно сравнить с желаемым состоянием  и определить следующий маршрут бурения 514. В конце маршрута бурения 514 буровое долото может оказаться в точке
и определить следующий маршрут бурения 514. В конце маршрута бурения 514 буровое долото может оказаться в точке  а не в точке
а не в точке  Поэтому выполняется еще один расчет, определяющий следующий маршрут бурения. Поскольку фактические маршруты бурения 512 и 514 не коллинеарны, то протяженность и ориентация реальных маршрутов 512 и 512 могут быть использованы в качестве векторов для определения позиции бурового долота в трехмерном пространстве. Таким образом, фактические маршруты, их местоположение и ориентация могут храниться в скважинном устройстве хранения данных 174 для расчета последующей позиции и ориентации.
Поэтому выполняется еще один расчет, определяющий следующий маршрут бурения. Поскольку фактические маршруты бурения 512 и 514 не коллинеарны, то протяженность и ориентация реальных маршрутов 512 и 512 могут быть использованы в качестве векторов для определения позиции бурового долота в трехмерном пространстве. Таким образом, фактические маршруты, их местоположение и ориентация могут храниться в скважинном устройстве хранения данных 174 для расчета последующей позиции и ориентации.
В другом варианте осуществления, модель пласта может быть запрограммирована в скважинном блоке управления 170 до опускания скважинного блока управления 170 в скважину. Скважинный блок управления 170 может затем сопоставить определенную позицию и ориентацию бурового долота, определенные способами, раскрытыми в настоящем описании, с моделью пласта. Скважинный блок управления 170 может затем определить траекторию бурового долота для последующей траектории бурения с использованием сопоставленной позиции и ориентации бурового долота с моделью пласта и изменить выбранный параметр управления (т.е. угол положения лицевой метки инклинометра и угол наклона), соответственно.
В еще одном варианте осуществления скважинный блок управления 170 может получать данные измерений пласта в процессе бурения отдатчиков оценки свойств пласта 410 и 412. Скважинный блок управления 170 может использовать полученные данные измерений пласта, а также позицию и ориентацию, определенные с использованием способов, раскрытых в настоящем описании, и выбрать траекторию бурового долота для последующего маршрута бурения. Например, буровое долото может осуществлять бурение в горизонтальном направлении, а данные измерений пласта могут указывать на необходимость бурения вниз, чтобы достичь залежей углеводородов. Маршрут бурового долота изменяется от бурения в горизонтальном направлении до бурения в вертикальном направлении, что определяется скважинным блоком управления 170.
В различных вариантах осуществления, скважинный блок управления 170 может использовать любую комбинацию методов управления, описанных выше, для изменения маршрута бурового долота.
В одном из вариантов осуществления настоящего изобретения, скважинный блок управления 170 способен управлять буровым долотом с использованием вычислений, выполненных полностью скважинным процессором. Таким образом, отсутствует необходимость передавать данные инклинометрических измерений вверх по стволу скважины, оператору на поверхности или в наземный процессор для приема таких данных измерений, выбора направления бурения и передачи сигналов в скважину, изменяющих различные параметры управления. В результате, оператор не участвует непосредственно в процессе направленного бурения. Вместо этого оператор становится просто наблюдателем и/или администратором процесса бурения. Для этого скважинный блок управления 170 может периодически посылать отчет о ходе бурения наверх для анализа и/или проверки оператором.
Поэтому, в одном варианте осуществления, настоящее изобретение описывает способ бурения скважины, включающий в себя: определение протяженности скважины от ее наземного расположения до бурового долота на забойном конце колонны бурильных труб в скважине; измерение азимутального угла и угла наклона бурового долота; использование скважинного процессора для: определения позиции и ориентации бурового долота, исходя из определенной протяженности, азимутального угла и угла наклона; и изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота при определении избранной траектории бурения скважины. Избранная траектория может быть: (i) заранее выбранных траекторий, сохраненных в памяти запоминающего устройства скважины; (ii) траекторию, определенную с помощью модели пласта, сохраненную в памяти запоминающего устройства скважины, и определенные расположение и ориентацию бурового долота; и/или (iii) траекторию, определенную скважинным процессором на месте с использованием данных измерений пласта полученных в скважине. Время прохождения звукового импульса по скважине от поверхности до бурового долота рассчитывается для определения длины ствола скважины. Звуковой импульс генерируется на поверхности в соответствии с известным графиком первого генератора тактового импульса. Время прибытия звукового импульса регистрируется в скважинном приемнике звуковых колебаний с использованием второго генератора тактового импульса в месте отсчета в скважине. Время прохождения рассчитывают, используя зарегистрированное время прибытия, полученное от второго генератора тактового импульса и известного графика генерирования звукового импульса. Первый генератор тактового импульса и второй генератор тактового импульса синхронизированы между собой. В различных вариантах осуществления, полученное время прохождения и известная предыдущая позиция и ориентация бурового долота используются для определения новой позиции бурового долота. Акустический импеданс колонны бурильных труб может использоваться для корректировки расчета длины колонны бурильных труб, на основе измеренного времени прохождения звуковым импульсом колонны бурильных труб. В примерном варианте осуществления параметр управления буровым долотом изменяется с использованием расчетов, выполненных исключительно на скважинном процессоре.
В другом варианте осуществления, настоящее изобретение относится к системе бурения скважины, системе, включающей в себя: колонну бурильных труб с бурильным долотом на забойном конце; задающее устройство скважинного тактового импульса на забойном конце бурильной колонны, регистрирующее время прибытия на скважинный конец звукового импульса, генерированного в колонне бурильных труб на поверхности; и скважинный процессор для: определения длины колонны бурильных труб, исходя из зарегистрированного времени прибытия; определения позиции и ориентации бурового долота, исходя из определенной протяженности, определенного азимутального угла и угла наклона; изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота при определении избранной траектории бурения скважины. Выбранная траектория может представляет собой, по меньшей мере, одну из: (i) заранее выбранных траекторий, сохраненных в памяти запоминающего устройства скважины; (ii) траекторию, определенную с помощью модели пласта, сохраненную в памяти запоминающего устройства скважины с определенной позицией и ориентацией бурового долота; и (iii) траекторию, определенную скважинным процессором на месте с использованием данных измерений пласта полученных в скважине. Процессор определяет длину колонны бурильных труб путем определения времени прохождения генерируемого звукового импульса по маршруту бурильной колонны от поверхности до место отсчета в скважине. В одном варианте осуществления, генератор звукового импульса на поверхности, формирует звуковой импульс в запланированное время, а скважинный процессор получает время прохождения, используя зарегистрированные время прибытия и известный график генерации звукового импульса. Задающее устройство наземного тактового импульса используется для управления генерацией звукового импульса генератором звукового импульса, при том задающее устройство наземного тактового импульса синхронизировано с задающим устройством скважинного тактового импульса. Скважинный процессор далее определяет позицию бурового долота с использованием полученного времени прохождения и известной предыдущей позиции и предыдущей ориентации бурового долота. Скважинный процессор далее выполняет расчеты для изменения параметра управления буровым долотом без передачи соответствующих данных оператору или получения инструкций от оператора или процессора с поверхности.
В еще одном варианте осуществления, настоящее изобретение относится к устройству бурения, включающему в себя: буровое долото на забойном конце колонны бурильных труб в скважине; приемник на забойном конце колонны бурильных труб, принимающий звуковой импульс, сгенерированный в колонне бурильных труб на поверхности; задающее устройство скважинного тактового импульса, генерирующее временную метку при приеме звукового импульса скважинным приемником; скважинный процессор для: определения длины колонны бурильных труб с использованием временной метки; определения позиции и ориентации бурового долота, исходя из определенной протяженности, определенного азимутального угла и определенного угла наклона бурового долота; и изменения параметра управления буровым долотом, с использованием определенной позиции и ориентации бурового долота при определении избранной траектории бурения скважины. Выбранная траектория может представлять собой, по меньшей мере, одну из: (i) заранее выбранных траекторий, сохраненных в памяти запоминающего устройства скважины; (ii) траекторию, определенную с помощью модели пласта, сохраненную в памяти запоминающего устройства скважины с определенной позицией и ориентацией бурового долота; и (iii) траекторию, определенную скважинным процессором на месте с использованием данных измерений пласта полученных в скважине. Скважинный процессор определяет длину колонны бурильных труб путем определения времени прохождения генерируемого звукового импульса по маршруту бурильной колонны от поверхности до места отсчета в скважине. В одном варианте осуществления, генератор звукового импульса на поверхности, формирует звуковой импульс в запланированное время, а скважинный процессор получает время прохождения, используя зарегистрированные время прибытия и известный график генерации звукового импульса. Наземное задающее устройство тактового импульса, синхронизированное с задающим устройством скважинного тактового импульса, используется для управления формированием звукового импульса в генераторе звукового импульса. Скважинный процессор далее определяет позицию бурового долота с использованием полученного времени прохождения и известной предыдущей позиции и предыдущей ориентации бурового долота.
Вышеизложенный материал описывает конкретные варианты осуществления для иллюстрации и разъяснения. Тем не менее, в свете настоящего описания, специалистам в данной области техники очевидно, что в конкретных раскрытых вариантах могут быть сделаны изменения с получением подобного или сходного результата, без отклонения от сущности и объема настоящего изобретения. Предполагается, что нижеследующая формула изобретения будет интерпретироваться с учетом всех таких модификаций и изменений.

Изобретение относится к бурению скважин и может быть использовано для направленного бурения при прохождении продуктивного пласта. Техническим результатом является повышение эффективности проведения ствола скважины в пределах пласта за счет повышения качества получаемых данных о местоположении бурового инструмента в скважине. В частности, предложен способ бурения скважины, включающий: генерирование, посредством расположенного на поверхности передатчика звуковых колебаний, разнесенных друг от друга на определенный интервал звуковых импульсов в расположенной в скважине колонне бурильных труб, которая имеет отражатели звука и акустический импеданс, а также буровое долото на забойном конце; задание, посредством расположенного на поверхности генератора тактового импульса, моментов времени для передатчика звуковых колебаний, в которые генерируются звуковые импульсы; регистрацию, посредством скважинного генератора тактового импульса, размещенного на забойном конце колонны труб, моментов времени прибытия звуковых импульсов на забойный конец; использование скважинного процессора для вычисления моментов времени прохождения звуковых импульсов с использованием зарегистрированных моментов времени прибытия и без ссылки на моменты времени генерации от расположенного на поверхности генератора тактового импульса, определения длины колонны бурильных труб с использованием вычисленных моментов времени прибытия, корректировки определенной длины с использованием известного акустического импеданса буровой колонны, определения позиции и ориентации бурового долота с использованием скорректированной длины и полученного азимутального угла и угла наклона бурового долота и изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота и получения выбираемой траектории бурения скважины, которая определяется скважинным процессором с использованием данных измерений пласта, полученных на месте в скважине. Раскрыта также система бурения скважины для реализации указанного способа. 2 н. и 12 з.п. ф-лы, 5 ил.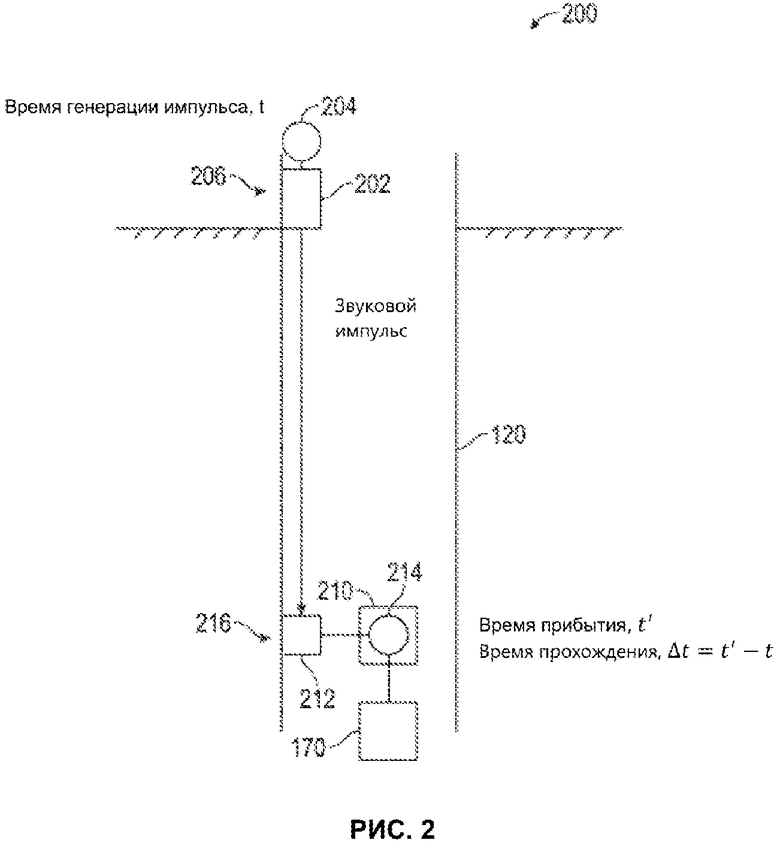
1. Способ бурения скважины, включающий:
генерирование, посредством расположенного на поверхности передатчика звуковых колебаний, разнесенных друг от друга на определенный интервал звуковых импульсов в расположенной в скважине колонне бурильных труб, которая имеет отражатели звука и акустический импеданс, а также буровое долото на забойном конце;
задание, посредством расположенного на поверхности генератора тактового импульса, моментов времени для передатчика звуковых колебаний, в которые генерируются звуковые импульсы;
регистрацию, посредством скважинного генератора тактового импульса, размещенного на забойном конце колонны труб, моментов времени прибытия звуковых импульсов на забойный конец;
использование скважинного процессора для:
вычисления моментов времени прохождения звуковых импульсов с использованием зарегистрированных моментов времени прибытия и без ссылки на моменты времени генерации от расположенного на поверхности генератора тактового импульса,
определения длины колонны бурильных труб с использованием вычисленных моментов времени прибытия,
корректировки определенной длины с использованием известного акустического импеданса буровой колонны,
определения позиции и ориентации бурового долота с использованием скорректированной длины и полученного азимутального угла и угла наклона бурового долота, и
изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота и получения выбираемой траектории бурения скважины, которая определяется скважинным процессором с использованием данных измерений пласта полученных на месте в скважине.
2. Способ по п. 1, в котором выбираемая траектория представляет собой по меньшей мере одну из: (i) заранее выбранных траекторий, сохраненных в памяти запоминающего устройства скважины; (ii) траекторию, определенную с помощью модели пласта, сохраненную в памяти запоминающего устройства скважины с определенной позицией и ориентацией бурового долота; и (iii) траекторию, определенную скважинным процессором на месте с использованием данных измерений пласта, полученных в скважине.
3. Способ по п. 1, в котором определение протяженности скважины далее включает определение моментов времени прохождения звуковых импульсов по маршруту скважины от наземного расположения до забойного конца.
4. Способ по п. 3, далее включающий: генерирование звуковых импульсов на поверхности согласно заданному графику; и использование процессора для определения моментов времени прохождения с использованием зарегистрированного времени прибытия и известного графика генерирования звукового импульса.
5. Способ по п. 4, в котором расположенный на поверхности генератор тактового импульса и скважинный генератор тактового импульса синхронизированы между собой.
6. Способ по п. 3, далее включающий определение позиции бурового долота с использованием полученных моментов времени прохождения и известной предыдущей позиции и ориентации бурового долота.
7. Способ по п. 1, далее включающий изменение параметра управления буровым долотом без получения команд от оператора или процессора с поверхности.
8. Система бурения скважины, включающая в себя:
колонну бурильных труб, имеющую отражатели звука и акустический импеданс, а также бурильное долото на забойном конце;
расположенный на поверхности передатчик звуковых колебаний для генерирования разнесенных друг от друга на определенный интервал звуковых импульсов в колонне бурильных труб;
расположенный на поверхности генератор тактового импульса для задания передатчику звуковых колебаний времени, в которое генерируются звуковые импульсы;
скважинный генератор тактового импульса на забойном конце бурильной колонны, выполненный с возможностью регистрации времени прибытия на забойный конец звуковых импульсов; и
скважинный процессор, выполненный с возможностью:
вычисления моментов времени прохождения звуковых импульсов с использованием зарегистрированных моментов времени прибытия и без ссылки на моменты времени генерации от расположенного на поверхности генератора тактового импульса,
определения длины колонны бурильных труб с использованием вычисленных моментов времени прибытия,
корректировки определенной длины с использованием известного акустического импеданса буровой колонны,
определения позиции и ориентации бурового долота с использованием скорректированной длины, полученного азимутального угла и угла наклона бурового долота, и
изменения параметра управления буровым долотом с использованием определенной позиции и ориентации бурового долота для получения выбираемой траектории скважины, определяемой скважинным процессором с использованием данных измерений пласта, полученных на месте в скважине.
9. Система по п. 8, в которой выбираемая траектория представляет собой по меньшей мере одну из: (i) заранее выбранных траекторий, сохраненных в памяти запоминающего устройства скважины; (ii) траекторию, определенную с помощью модели пласта, сохраненную в памяти запоминающего устройства скважины с определенной позицией и ориентацией бурового долота; и (iii) траекторию, определенную скважинным процессором на месте с использованием данных измерений пласта, полученных в скважине.
10. Система по п. 8, в которой процессор выполнен с возможностью определения длины колонны бурильных труб путем определения моментов времени прохождения генерируемых звуковых импульсов по маршруту бурильной колонны от поверхности до забойного конца.
11. Система по п. 10, в которой передатчик звуковых колебаний выполнен с возможностью генерирования звуковых импульсов в запланированное время, а скважинный процессор выполнен с возможностью определения моментов времени прохождения, используя зарегистрированные моменты, время прибытия и известный график генерации звукового импульса.
12. Система по п. 8, в которой наземный генератор тактового импульса, использованный для управления генерированием звуковых импульсов в передатчике звуковых колебаний, синхронизирован со скважинным генератором тактового импульса.
13. Система по п. 10, в которой скважинный процессор выполнен с возможностью определения позиции бурового долота с использованием полученного времени прохождения и известной предыдущей позиции и ориентации бурового долота.
14. Система по п. 8, в которой скважинный процессор выполнен с возможностью вычисления для изменения параметра управления буровым долотом без получения команд от оператора или процессора на поверхности.
| US 20120018219 A1, 26.01.2012 | |||
| Устройство для укладки в ящики бисквитов или галет | 1939 |
|
SU67635A1 |
| US 20100118657 A1, 13.05.2010 | |||
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| US 5467832 A1, 21.11.1995. | |||

