Изобретение относится к области гироскопического и навигационного приборостроения, в частности к приборам контроля параметров забойных скважин.
Известны системы контроля разведочных скважин, в которых спускаемые зонды содержат блок ортогональных акселерометров и трехкомпонентный магнитометр (Исаченко В.Х. "Инклинометрия скважин", М.: Недра, 1987).
Недостаток этих систем заключается в том, что с их помощью возможно проводить измерения параметров скважин только при неработающем буре и при полной остановке зонда.
Известен гироскопический инклинометр (SU 1002551, кл. Е 21 В 47/022, 07.03.1983), содержащий корпус, трехстепенный гироскоп, два датчика углов поворотов, закрепленных на подвижной эксцентричной рамке, измерительный датчик угловой скорости, моментный двигатель, преобразовательный блок и два цифровых фазометра, причем датчик угловой скорости установлен на наружной рамке трехстепенного гироскопа так, что его измерительная ось расположена перпендикулярно вектору кинетического момента трехстепенного гироскопа, статор которого размещен на наружной рамке гироскопа, а ротор на внутренней.
Недостатком данного инклинометра является большая сложность из-за необходимости применения двух прецизионных гироскопов - трехстепенного и двухстепенного.
Известен способ определения азимута и зенитного угла скважины и гироскопический инклинометр (RU 2100594, кл. Е 21 В 47/02, 27.12.1997), содержащий гироскопический стабилизатор, на платформе которого жестко установлены измерители ускорений и измеритель угловой скорости на основе трехстепенного гироскопа. В первоначальном режиме выставки платформу вращают с постоянной угловой скоростью и по обработке сигнала измерителя угловой скорости определяют начальную ориентацию измерительных осей измерителей ускорений в азимуте. При движении скважинного прибора для определения азимута и зенитного угла записывают сигналы измерителей ускорений, на основе которых на каждом шаге работы вычислителя формируют матрицу ориентации в виде произведения приращения матрицы ориентации на матрицу ориентации на предыдущем шаге. Построение матрицы ориентации осуществляют как функцию углов ориентации, которые определяются на каждом шаге по сигналу измерителей ускорений.
Недостатком данного технического решения является сложность кинематической схемы прибора и большие габариты, обусловленные наличием в его основе гироскопического стабилизатора и невозможность его использования при обследовании забойных скважин малых диаметров.
Ближайшей по технической сущности к предлагаемому изобретению является известная система определения параметров разведочных скважин (RU 2109942, кл. Е 21 В 47/02, 27.04.1998), содержащая модуль датчиков первичной информации в составе блока трех датчиков угловой скорости, блока трех магнитометров и блока трех маятниковых компенсационных акселерометров, причем измерительные оси каждой тройки датчиков образуют ортогональные трехгранники, коллинеарные между собой и с осями спускаемого зонда. Кроме этого, система содержит модуль обработки информации, в состав которого входят блок фильтров нижних частот, блок вычисления параметров ориентации, блок идентификации режимов движения основания и блок вычисления координат различных модификаций.
Недостатком данной системы являются значительные погрешности в определении координат спускаемого зонда, возникающие при больших величинах угловых скоростей закрутки зонда при работе зонда в скважине, которые могут существенно превышать диапазон измерения датчика угловой скорости скручивания.
Задачей предлагаемого изобретения является повышение точности определения параметров разведочных скважин.
Поставленная задача достигается тем, что в известную систему определения параметров забойных скважин, содержащую модуль, в состав которого входит блок датчиков первичной информации в виде трех акселерометров с ортогональными измерительными осями, трех магнитометров с ортогональными измерительными осями, трех гироскопических измерителей угловой скорости (ГИУС) с ортогональными измерительными осями, а также блок обработки информации, входы которого соединены с соответствующими выходами блока датчиков первичной информации, в состав которого входят блок фильтров нижних частот, блок вычисления параметров ориентации, блок идентификации режимов движения, блок вычисления координат, содержащий блок коммутации, вычислитель направляющих косинусов и вычислитель координат, при этом выходы датчиков соединены через блок фильтров нижних частот с соответствующими входами блока вычисления параметров ориентации, три входа которого соединены через блок коммутации с последовательно соединенными вычислителем направляющих косинусов и вычислителем координат, а выход ГИУС, измерительная ось которого параллельна продольной оси зонда, дополнительно соединен через блок идентификации режимов движения зонда с управляющим входом блока коммутации, при этом блок вычисления параметров ориентации содержит вычислитель скорости изменения параметров ориентации, вычислитель тригонометрических оценок параметров ориентации, три сравнивающих устройства, по три сумматора цепей позиционной и интегральной коррекции, по три интегратора цепи прямой связи и цепи интегральной коррекции, а также по три усилителя позиционной и интегральной коррекции, при этом три первых входа вычислителя скорости изменения параметров ориентации соединены с соответствующими входами по угловым скоростям блока фильтров нижних частот, а выходы этого вычислителя в каждом из трех каналов соединены через соответствующие сумматоры цепей интегральной и позиционной коррекции с одним из интеграторов цепи прямой связи, выходы которых соединены с тремя другими входами вычислителя скорости изменения параметров ориентации и входами соответствующих сравнивающих устройств, вторые входы которых соединены с соответствующими выходами вычислителя тригонометрических оценок параметров ориентации, входы которых соединены с шестью выходами блока фильтров нижних частот по сигналам с магнитометров и акселерометров, а также с входами двух интеграторов цепи прямой связи, выход сравнивающего устройства в каждом из трех каналов соединен через последовательно соединенные интегратор и усилитель цепи позиционной коррекции с вторым входом сумматора цепи позиционной коррекции, при этом блок идентификации режимов движения зонда содержит последовательно соединенные устройство умножения, фильтр и пороговое устройство, при этом два входа устройства умножения соединены между собой, а между вычислителем приращения длины скважины и вычислителем координат включено логическое устройство, выход которого соединен со входом у вычислителя направляющих косинусов, введены три микромеханических гироскопа (ММГ), измерительные оси которых параллельны продольной оси зонда, два магнитометра так, что измерительные оси четырех магнитометров, располагаемые в перпендикулярной продольной оси зонда плоскости, перпендикулярны продольной оси зонда и между ними углы 90o, причем четыре магнитометра расположены по периферии, а измерительная ось пятого магнитометра параллельна продольной оси зонда, измеритель длины каротажного кабеля и вычислитель предварительной обработки информации, а корпус модуля датчиков первичной информации выполнен из немагнитных материалов. В состав вычислителя предварительной обработки информации входят устройство сравнения, четыре переключающих устройства, шесть сумматоров, шесть сглаживающих фильтров, шесть буферных запоминающих устройств, три вычислителя масштабных коэффициентов, три вычислителя оценок угловой скорости и осредняющее устройство, при этом выход ГИУС, измерительная ось которого параллельна продольной оси зонда, соединен со входом первого переключающего устройства и со входом устройства сравнения, выход первого переключающего устройства соединен со входами первого, второго и третьего вычислителей масштабных коэффициентов и входом третьего переключающего устройства, а также со входами первого, второго и третьего сумматоров, выходы которых соединены со входами первого, второго и третьего сглаживающих фильтров, выходы которых соединены со входом второго переключающего устройства, выход которого соединен со входами первого, второго и третьего буферного запоминающего устройства, выходы которых соединены со входами четвертого, пятого и шестого сумматоров, причем входы шести сумматоров соединены с выходами трех микромеханических гироскопов, выходы четвертого, пятого и шестого сумматоров соединены с входами первого, второго и третьего вычислителей масштабного коэффициента и первого, второго и третьего вычислителей оценки угловой скорости соответственно, выходы первого, второго и третьего вычислителей масштабного коэффициента соединены с входами четвертого, пятого и шестого сглаживающих фильтров, выходы которых соединены с входом четвертого переключающего устройства, выход которого соединен с входом четвертого, пятого и шестого буферного запоминающего устройства, выходы которых соединены с входами первого, второго и третьего вычислителей оценки угловой скорости соответственно, выходы которых соединены с входом осредняющего устройства, выход которого соединен со вторым входом третьего переключающего устройства, выход которого соединен с входом модуля обработки информации, выход измерителя длины каротажного кабеля соединен со входом логического устройства, выход которого соединен со входом вычислителя направляющих косинусов.
На фиг. 1 представлена функциональная схема системы определения параметров забойных скважин, на фиг.2 и 3 - функциональные схемы блока вычисления параметров ориентации и блока идентификации режимов движения зонда соответственно, на фиг.4 - функциональная схема вычислителя предварительной обработки информации.
Система содержит модуль 1, в составе которого входит блок (см. фиг. 1) датчиков первичной информации (ДПИ), состоящий из блока трех гироскопических измерителей угловой скорости (ГИУС), блока трех акселерометров (АК) и блока магнитометров (ММ), содержащего блок пяти магнитометров, причем измерительные оси четырех магнитометров, располагаемых в перпендикулярной продольной оси зонда плоскости, перпендикулярны продольной оси зонда и между ними углы 90o, четыре магнитометра расположены по периферии, а измерительная ось пятого магнитометра параллельна продольной оси зонда, а также три микромеханических гироскопа (ММГ), измерительные оси которых параллельны продольной оси зонда. Измерительные оси каждой тройки датчиков ГИУС, АК и блока ММ образуют ортогональные трехгранники, коллинеарные между собой и с осями спускаемого зонда. Кроме этого, модуль 1 содержит блок обработки информации, в состав которого входят блок 2 фильтров нижних частот, блок 3 вычисления параметров ориентации, блок 4 идентификации режимов (БИР) движения зонда, блок 5 вычисления координат (БВК), содержащий блок 6 коммутации (БК), вычислитель 7 направляющих косинусов (ВК), вычислитель 8 координат (ВК) со счетчиком числа швов наращиваемых бурильных труб, вычислитель предварительной обработки информации 10 (ВПОИ), логическое устройство 66 и измеритель длины каротажного кабеля 67.
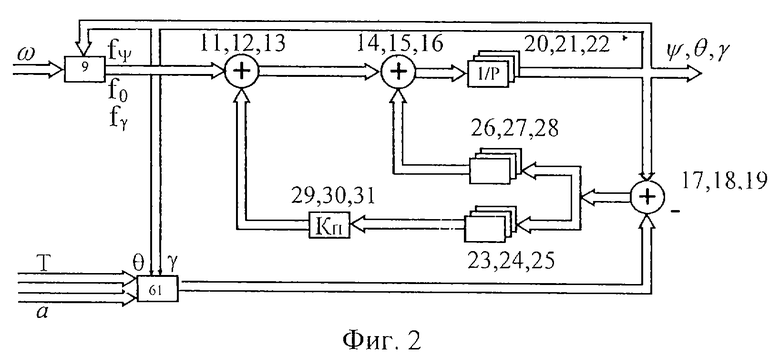
Выходы ДНИ соединены через блок ФНЧ с соответствующими входами БВПО, три выхода которого соединены через блок коммутации (БК) с последовательно соединенными ВНК и ВК, а выход ГИУС, измерительная ось которого параллельна продольной оси зонда, соединен с входом устройства сравнения (35) и с входом первого переключающего устройства (ПУ1, 58) в ВПОИ (10), дополнительно соединен с входом переключающего устройства, выходы трех ММГ соединены со входами первого, второго, третьего сумматоров (36, 37, 38) и четвертого, пятого и шестого сумматоров (45, 46, 47) в ВПОИ (10), выход которого дополнительно соединен через БИР (4) с управляющим входом БК (6). На первый и второй входы логического устройства (66) соответственно поступает информация с выхода измерителя длины каротажного кабеля (67) и о длине наращиваемых бурильных труб, а выход блока логики (66) соединен со входом вычислителя направляющих косинусов ВНК (7). БВПО (см. фиг.2) содержит вычислитель 9 скорости изменения параметров ориентации (ВСИПО), вычислитель 62 тригонометрических оценок параметров ориентации (ВАОПО), по три сумматора 11, 12, 13 цепей интегральной и 14, 15, 16 позиционных коррекций, по три интегратора 20, 21, 22 цепи прямой связи и 23, 24, 25 цепи интегральной коррекции, а также по три усилителя 26, 27, 28 позиционной и 29, 30, 31 интегральной коррекций. Три первых входа ВСИПО (9) соединены с соответствующими выходами по угловым скоростям блока ФНЧ (2), а выходы ВСИПО (9) в каждом из трех каналов соединены через соответствующие сумматоры 11 (12, 13) цепей интегральной и 14 (15, 16) позиционной коррекций с одним из интеграторов 20 (21, 22) цепи прямой связи, выходы которых соединены с тремя другими входами ВСИПО (9) и входами соответствующих сравнивающих устройств 17 (18, 19), вторые входы которых соединены с соответствующими выходами ВАОПО (62). При этом входы ВАОПО (62) соединены с шестью выходами блока ФНЧ (2) по сигналам датчиков напряженности магнитного поля Земли и сигналам ускорений, а также с выходами двух интеграторов (21, 22) цепи прямой связи. Выход сравнивающего устройства 17 (18, 19) в каждом из трех каналов соединен через последовательно соединенные интегратор 23 (24, 25) и усилитель 29 (30, 31) цепи интегральной коррекции с вторым входом сумматора 11 (12, 13) цепи интегральной коррекции, а также через усилитель 26 (27, 28) цепи позиционной коррекции с вторым входом сумматора 14 (15, 16) цепи позиционной коррекции.
Блок 4 идентификации режимов движения зонда (см. фиг.3) содержит последовательно соединенные устройство умножения 32, фильтр 33 и пороговое устройство (ПУ) 34, при котором два входа устройства умножения соединены между собой.
Вычислитель предварительной обработки информации (ВПОИ) 10 (см. фиг.4) содержит устройство сравнения (35), первое (58), второе (59), третье (60), четвертое (61) переключающие устройства, первый (36), второй (37), третий (38), четвертый (45), пятый (46), шестой (47) сумматоры, первый (39), второй (40), третий (41), четвертый (51), пятый (52), шестой (53) сглаживающие фильтры, первое (42), второе (43), третье (44), четвертое (62), пятое (63), шестое (64) буферные запоминающие устройства, первый (48), второй (49), третий (50) вычислитель масштабных коэффициентов (Км), первый (54), второй (55), третий (56) вычислители оценок угловой скорости и осредняющее устройство (57), при этом выход первого переключающего устройства (58) соединен со входами первого (48), второго (49) и третьего (50) вычислителей масштабных коэффициентов (Км) и входом третьего порогового устройства (60) и со входами первого (36), второго (37) и третьего (38) сумматоров, выходы которых соединены со входами первого (39), второго (40) и третьего (41) сглаживающих фильтров, выходы которых соединены со входом второго (59) переключающего устройства, выход которого соединен со входами первого (42), второго (43) и третьего (44) буферного запоминающего устройства, выходы которых соединены со входами четвертого (45), пятого (46), шестого (47) сумматоров, выходы которых соединены со входами первого (48), второго (49) и третьего (50) вычислителей масштабного коэффициента (Км) и первого (54), второго (55) и третьего (56) вычислителей оценки угловой скорости соответственно, выходы первого (48), второго (49) и третьего (50) вычислителей масштабного коэффициента соединены со входами четвертого (51), пятого (52), шестого (53) сглаживающих фильтров, выходы которых соединены со входами четвертого переключающего устройства (61), выход которого соединен со входами четвертого (62), пятого (63), шестого (64) буферного запоминающего устройства, выходы которых соединены со входами первого (54), второго (55) и третьего (56) вычислителей оценки угловой скорости соответственно, выходы которых соединены со входом осредняющего устройства (57) , выход которого соединен со вторым входом третьего переключающего устройства (60).
Система определения параметров забойных скважин работает следующим образом. Оценки параметров ориентации Ψ, ϑ, φ формируются блоком 3 по сигналам ГИУС, магнитометров и акселерометров, предварительно обработанным в блоке 2 фильтром нижних частот, по следующему алгоритму.
Вычислитель (9) по сигналам и оценкам угловых скоростей  и оценкам параметров ориентации Ψ, ϑ, φ формирует оценки скоростей изменения параметров ориентации
и оценкам параметров ориентации Ψ, ϑ, φ формирует оценки скоростей изменения параметров ориентации


Для уменьшения влияния больших угловых скоростей вращения и углов закрутки зонда, возможных при опускании зонда в забойную скважину, с помощью трех ММГ, имеющих меньшую точность, но больший диапазон входной угловой скорости, чем ГИУС, и вычислителя предварительной обработки информации ВПОИ (10), оценка угловой скорости ( ) вращения вокруг продольной оси зонда с помощью ВПОИ (10) определяется следующим образом.
) вращения вокруг продольной оси зонда с помощью ВПОИ (10) определяется следующим образом.
Если измеряемая ГИУС, измерительная ось которого параллельна продольной оси зонда, угловая скорость скручивания /ωy/<0,95ωдоп, проверяемая в устройстве сравнения (35), где, например, ωдоп∈[180%...220%], то первое (58), второе (59) и четвертое (61) переключающие устройства замкнуты, а третье (60) переключающее устройство замкнуто на первый вход и на вход вычислителей масштабных коэффициентов (48, 49, 50) и вычислителя (9) с выхода ГИУС поступает сигнал  Сигналы с трех ММГ о величинах входной угловой скорости вращения зонда по продольной оси ωyММГi(i = 1, 2, 3) поступают на вход первого, второго и третьего сумматоров (36, 37, 38), в которых определяются разности между сигналом ГИУС и сигналами трех ММГ Δωyi = ωy-ωНММГ, (i = 1, 2, 3). Эти разности, являющиеся оценками нулевых сигналов трех ММГ, через первый, второй и третий сглаживающие фильтры (39, 40, 41) с передаточной функцией W(p)=l/(Tp+l), где Т - постоянная времени, Т= 5-10 с, поступает далее на соответствующие буферные запоминающие устройства (42, 43, 44) и запоминаются в них до поступления новой информации. Далее с них оценки
Сигналы с трех ММГ о величинах входной угловой скорости вращения зонда по продольной оси ωyММГi(i = 1, 2, 3) поступают на вход первого, второго и третьего сумматоров (36, 37, 38), в которых определяются разности между сигналом ГИУС и сигналами трех ММГ Δωyi = ωy-ωНММГ, (i = 1, 2, 3). Эти разности, являющиеся оценками нулевых сигналов трех ММГ, через первый, второй и третий сглаживающие фильтры (39, 40, 41) с передаточной функцией W(p)=l/(Tp+l), где Т - постоянная времени, Т= 5-10 с, поступает далее на соответствующие буферные запоминающие устройства (42, 43, 44) и запоминаются в них до поступления новой информации. Далее с них оценки  поступают на четвертый, пятый и шестой сумматоры (45, 46, 47), на входы которых также поступают сигналы с выхода трех ММГ, после исключения с помощью сумматоров (45, 46, 47) в сигналах трех ММГ оценок нулевого сигнала ММГ по соотношению
поступают на четвертый, пятый и шестой сумматоры (45, 46, 47), на входы которых также поступают сигналы с выхода трех ММГ, после исключения с помощью сумматоров (45, 46, 47) в сигналах трех ММГ оценок нулевого сигнала ММГ по соотношению  откорректированные сигналы ММГ поступают на входы первого, второго и третьего (48, 49, 50) вычислителей масштабного коэффициента и первого, второго и третьего (54, 55, 56) вычислителей оценок угловой скорости соответственно. В первом, втором и третьем (48, 49, 50) вычислителях оценок масштабного коэффициента определяются оценки масштабных коэффициентов каждого ММГ по соотношению Kmi = ωy/ωyММГi, (i=1, 2, 3), которые далее через четвертый, пятый и шестой сглаживающие фильтры (51, 52, 53) с передаточной функцией W(p)=l/(Tp+l), где Т - постоянная времени, Т = 5-10 с и четвертое переключающее устройство (61) поступают соответственно на четвертое (62), пятое (63), шестое (64) буферные запоминающие устройства и запоминаются в них до получения новой информации, а далее с их выхода поступают на входы первого, второго и третьего вычислителей оценок угловой скорости (54, 55, 56) соответственно, в которых определяются оценки угловой скорости скручивания по соотношению
откорректированные сигналы ММГ поступают на входы первого, второго и третьего (48, 49, 50) вычислителей масштабного коэффициента и первого, второго и третьего (54, 55, 56) вычислителей оценок угловой скорости соответственно. В первом, втором и третьем (48, 49, 50) вычислителях оценок масштабного коэффициента определяются оценки масштабных коэффициентов каждого ММГ по соотношению Kmi = ωy/ωyММГi, (i=1, 2, 3), которые далее через четвертый, пятый и шестой сглаживающие фильтры (51, 52, 53) с передаточной функцией W(p)=l/(Tp+l), где Т - постоянная времени, Т = 5-10 с и четвертое переключающее устройство (61) поступают соответственно на четвертое (62), пятое (63), шестое (64) буферные запоминающие устройства и запоминаются в них до получения новой информации, а далее с их выхода поступают на входы первого, второго и третьего вычислителей оценок угловой скорости (54, 55, 56) соответственно, в которых определяются оценки угловой скорости скручивания по соотношению  С выхода 54, 55, 56 оценки угловой скорости скручивания поступают на вход осредняющего устройства (57), в котором определяется осредненная оценка угловой скорости скручивания по соотношению
С выхода 54, 55, 56 оценки угловой скорости скручивания поступают на вход осредняющего устройства (57), в котором определяется осредненная оценка угловой скорости скручивания по соотношению  Выход осредняющего устройства соединен со вторым входом третьего переключающего устройства (60). Если при /ωy/>ωдоп первое (58), второе (59) и четвертое (61) переключающие устройства разомкнуты, а третье (60) замкнуто, на второй вход и на вход вычислителя 9 поступает осредненная оценка угловой скорости
Выход осредняющего устройства соединен со вторым входом третьего переключающего устройства (60). Если при /ωy/>ωдоп первое (58), второе (59) и четвертое (61) переключающие устройства разомкнуты, а третье (60) замкнуто, на второй вход и на вход вычислителя 9 поступает осредненная оценка угловой скорости  скручивания, определенная по сигналам ММГ с учетом проведенной с помощью ГИУС калибровки масштабных коэффициентов и оценок нулевых сигналов.
скручивания, определенная по сигналам ММГ с учетом проведенной с помощью ГИУС калибровки масштабных коэффициентов и оценок нулевых сигналов.
Вычислитель 10 по сигналам ускорений  напряженности магнитного поля Земли
напряженности магнитного поля Земли  а также используя оценки ϑ, γ, формирует тригонометрические оценки параметров ориентации
а также используя оценки ϑ, γ, формирует тригонометрические оценки параметров ориентации
ϑ* = arcsin(ax/g); (2)
γ* = -arctg(az/ay),
где Tx= T'x+T"x; Tz=T'z+T"z; Т"х;Т"z - сигналы магнитометров с взаимно перпендикулярными осями чувствительности, расположенными в перпендикулярной продольной оси зонда плоскости на периферии; T'x, T'z - сигналы магнитометра, измерительная ось которого параллельна продольной оси зонда.
Далее тригонометрические оценки Ψ*, ϑ*, γ* сравниваются на сумматорах (17, 18, 19) с оценками параметров ориентации Ψ, ϑ, γ и с помощью усилителей (26, 27, 28), а также усилителей (29, 30, 31) и интеграторов (23, 24, 25) реализуются позиционно-интегральные коррекции по разности Ψ*-Ψ, ϑ*-ϑ, γ*-γ.. Корректирующие сигналы (позиционной и интегральной коррекции) через сумматоры 11-16 совместно с соответствующими выходными сигналами блока 9 подаются на соответствующие интеграторы 20, 21, 22, на выходе которых и формируются оценки параметров ориентации.
Предлагаемая система определяет угловые параметры скважин и может быть использована как при бурении скважин, так и для контроля обсаженных скважин при спуске и подъеме измерительного модуля.
При бурении скважин вычисление координат модуля осуществляются в моменты остановки бура для наращивания бурильных труб. Моменты остановки бура определяются в результате анализа сигнала "азимутального" ГИУС. При работающем буре ГИУС, измерительная ось которого параллельна продольной оси зонда, реагирует на круговые вибрации и среднеквадратическое значение его сигнала, вычисляемое в блоке 4, резко увеличивается. Это служит признаком работы бура (J= 0). Таким образом, алгоритм формирования управляющего сигнала имеет следующий вид:
где Δ= 0,01 (рад/с)2; T1=20-40 (с) - постоянная величина.
При остановке бура блок 4 вырабатывает сигнал J=1 и блок 6 коммутирует выходы БВПО и входы ВПК, где определяются направляющие косинусы
C21 = sinϑ;
C22 = cosϑcosγ; (5)
C23 = cosϑsinγ.
После этого блок 8 однократно определяет координаты модуля по следующему алгоритму:
ξn = ξn-1+LT[n]•(c21[n]+c21[n-1])/2;
ηn = ηn-1+LT[n]•(c22[n]+c22[n-1])/2; (6)
ζn = ζn-1+LT[n]•(c23[n]+c23[n-1])/2,
где LT(n) - длина наращиваемых бурильных труб, n - порядковый номер остановки бура для наращивания бурильных труб, а на первом шаге в качестве LТ принимается L= LT+Lo, где Lo - расстояние между буром и модулем, определяемое немагнитной вставкой корпуса скважинного прибора и равное 30-40 м.
При контроле обсаженных скважин постоянно определяются координаты скважинного прибора по изменению длины ΔLK[i] каротажного кабеля, поступающей с измерителя длины каротажного кабеля 67 с частотой опроса датчиков, например, (20-100) Гц:
ξi+1 = ξI+ΔLK[i]c21[i];
ηi+1 = ηi+ΔLK[i]c22[i];
ζi+1 = ζi+ΔLK[i]c23[i], (7)
где i - номер такта опроса датчиков.
Однако, при определении координат скважинного прибора по изменению длины каротажного кабеля возможны ошибки из-за растяжений и провисов каротажного кабеля. С целью коррекции данных ошибок задача счисления координат скважинного прибора параллельно решается по информации о количестве и длине бурильных труб, пройденных скважинным прибором. Для этого при спуске и подъеме с помощью блока магнитометров Tx, Tz идентифицируются моменты прохождения зонда мимо швов трубы (при которых Тхn-Тхn(1,05...1,4); Tzn-Tzn(1,05...1,4)) и при известной длине трубы LT и определенной с помощью БВПО ее ориентации определяется приращение координат местонахождения зонда и сами координаты по выражениям, аналогичным (6)
ξn = ξn-1+LT[n]•(c21[n]+c21[n-1])/2;
ηn = ηn-1+LT[n]•(c22[n]+c22[n-1])/2; (8)
ζn = ζn-1+LT[n]•(c23[n]+c23[n-1])/2,
где n - порядковый номер соединительного шва бурильных труб, запоминаемый в блоке 8. Однако, при этом возможно появление ложных сигналов при прохождении скважинного прибора через грунт со значительными магнитными аномалиями.
С учетом характера погрешностей решений задачи навигации, описанными выше способами, предложена следующая процедура комплексной обработки информации при контроле обсаженных скважин.
По информации, поступающей в модуль обработки информации с измерителя длины каротажного кабеля 67, определяется изменение длины каротажного кабеля ΔLK[n, n-1] за время прохождения от n-1 до n - соединительного шва бурильных труб. В логическом устройстве 66 проверяется соответствие изменения длины кабеля ΔLK[n, n-1] за это время длине LT[n] последней пройденной трубы. В качестве граничного значения этого рассогласования принято ΔLдоп - верхний предел возможной погрешности измерения по длине каротажного кабеля.
Если |ΔLK[n, n-1]-LT[n]>ΔLдоп|, то это означает, что данный отрезок скважины проходит через грунт со значительными магнитными аномалиями и в блоке 8 в качестве координат модуля принимаются координаты, вычисленные по каротажному кабелю в соответствии с выражением (7).
В ином случае, если |ΔLK[n, n-1]-LT[n]≤ΔLдоп|, то в блоке 8 в качестве координат модуля принимаются координаты, определенные по соотношению (8). При этом списывается накопленная ошибка счисления координат, определенная по длине каротажного кабеля: ξi+1 = ξn; ηi+1 = ηn; ζi+1 = ζn.и
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2295113C2 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1998 |
|
RU2156440C2 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2158903C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1996 |
|
RU2108546C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ОРИЕНТАЦИИ В ПРОСТРАНСТВЕ ПРОДОЛЬНОЙ ОСИ ТРУБОПРОВОДА | 2001 |
|
RU2213324C2 |
| ИНТЕГРИРОВАННАЯ ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ СИСТЕМА ОРИЕНТАЦИИ И НАВИГАЦИИ ДЛЯ МОРСКИХ ОБЪЕКТОВ | 2013 |
|
RU2523670C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |


Изобретение относится к области гироскопического и навигационного приборостроения, в частности к приборам контроля параметров забойных скважин. Техническим результатом изобретения является повышение точности определения параметров забойных скважин. Для этого система содержит модуль контроля скважины, в составе которого имеется блок датчиков первичной информации в виде трех акселерометров с ортогональными осями чувствительности, трех магнитометров с ортогональными осями чувствительности, трех гироскопических измерителей угловой скорости (ГИУС) с ортогональными осями чувствительности, а также блок обработки информации, три микромеханических гироскопа, измерительные оси которых параллельны продольной оси зонда, два магнитометра, установленных так, что измерительные оси четырех магнитометров, располагаемые в перпендикулярной продольной оси зонда плоскости, перпендикулярны продольной оси зонда и между ними углы 90o. Причем четыре магнитометра расположены по периферии, а измерительная ось пятого магнитометра параллельна продольной оси зонда. Также система содержит измеритель длины каротажного кабеля, логическое устройство и вычислитель предварительной обработки информации, а корпус блока датчиков первичной информации выполнен из немагнитных материалов. 4 ил.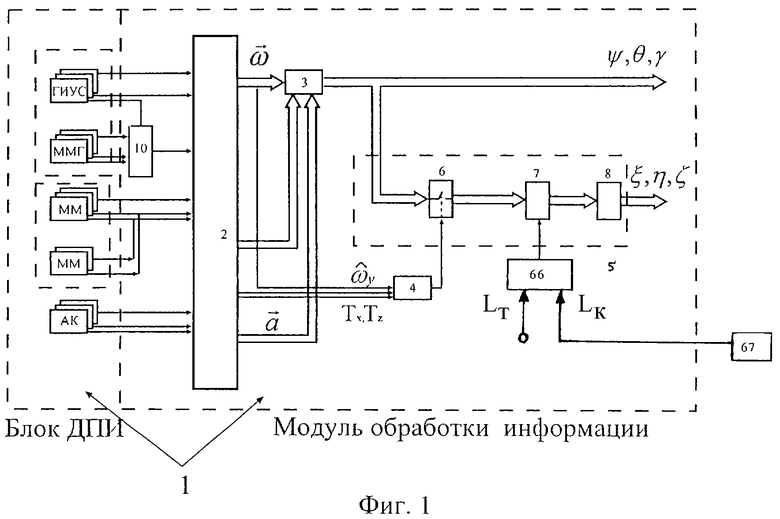
Система определения параметров забойных скважин, содержащая модуль, в состав которого входит блок датчиков первичной информации в виде трех акселерометров с ортогональными измерительными осями, трех магнитометров с ортогональными измерительными осями, трех гироскопических измерителей угловой скорости (ГИУС) с ортогональными измерительными осями, а также модуль обработки информации, входы которого соединены с соответствующими выходами блока датчиков первичной информации, в состав которого входят блок фильтров нижних частот, блок вычисления параметров ориентации, блок идентификации режимов движения зонда, блок вычисления координат, содержащий блок коммутации, вычислитель направляющих косинусов и вычислитель координат, при этом выходы датчиков соединены через блок фильтров нижних частот с соответствующими входами блока вычисления параметров ориентации, три выхода которого соединены через блок коммутации с последовательно соединенными вычислителем направляющих косинусов и вычислителем координат, а выход ГИУС, измерительная ось которого параллельна продольной оси зонда, дополнительно соединен через блок идентификации режимов движения зонда с управляющим входом блока коммутации, при этом блок вычисления параметров ориентации содержит вычислитель скорости изменения параметров ориентации, вычислитель тригонометрических оценок параметров ориентации, три сравнивающих устройства, по три сумматора цепей позиционной и интегральной коррекции, по три интегратора цепи прямой связи и цепей интегральной коррекции, а также по три усилителя позиционной и интегральной коррекции, при этом три первых входа вычислителя скорости изменения параметров ориентации соединены с соответствующими входами по угловой скорости блока фильтров нижних частот, а выходы этого вычислителя в каждом из трех каналов соединены через соответствующие сумматоры цепей интегральной и позиционной коррекции с одним из интеграторов прямой цепи, выходы которых соединены с тремя другими входами вычислителя скорости изменения параметров ориентации и входами соответствующих сравнивающих устройств, вторые входы которых соединены с соответствующими выходами вычислителя тригонометрических оценок параметров ориентации, входы которых соединены с шестью выходами блока фильтров нижних частот по сигналам с магнитометров и акселерометров, а также с входами двух интеграторов цепи прямой связи, выход сравнивающего устройства в каждом из трех каналов соединен через последовательно соединенные интегратор и усилитель цепи позиционной коррекции с вторым входом сумматора цепи позиционной коррекции, при этом блок идентификации режимов движения зонда содержит последовательно соединенные устройство умножения, фильтр и пороговое устройство, при этом два входа устройства умножения соединены между собой, а между вычислителем приращения длины скважины и вычислителем координат включено логическое устройство, выход которого соединен со входом вычислителя направляющих косинусов, отличающаяся тем, что дополнительно введены три микромеханических гироскопа, измерительные оси которых параллельны продольной оси зонда, два магнитометра, так что измерительные оси четырех магнитометров, располагаемые в перпендикулярной продольной оси зонда плоскости, перпендикулярны продольной оси зонда и между ними углы 90o, причем четыре магнитометра расположены по периферии, а измерительная ось пятого магнитометра параллельна продольной оси зонда, измеритель длины каротажного кабеля и вычислитель предварительной обработки информации, в состав которого входят устройство сравнения, четыре переключающих устройства, шесть сумматоров, шесть сглаживающих фильтров, шесть буферных запоминающих устройств, три вычислителя масштабных коэффициентов, три вычислителя оценок угловой скорости и осредняющее устройство, при этом выход ГИУС, измерительная ось которого параллельна продольной оси зонда, соединен со входом первого переключающего устройства и со входом устройства сравнения, выход первого переключающего устройства соединен со входами первого, второго и третьего вычислителей масштабных коэффициентов и входом третьего переключающего устройства, а также со входами первого, второго и третьего сумматора, выходы которых соединены со входами первого, второго и третьего сглаживающих фильтров, выходы которых соединены со входом второго переключающего устройства, выход которого соединен со входами первого, второго и третьего буферного запоминающего устройства, выходы которых соединены со входами четвертого, пятого и шестого сумматоров, причем входы шести сумматоров соединены с выходами трех микромеханических гироскопов, выходы четвертого, пятого и шестого сумматоров соединены со входами первого, второго и третьего вычислителей масштабного коэффициента и первого, второго и третьего вычислителей оценки угловой скорости соответственно, выходы первого, второго и третьего вычислителей масштабного коэффициента соединены со входами четвертого, пятого и шестого сглаживающих фильтров, выходы которых соединены с входом четвертого переключающего устройства, выход которого соединен со входами четвертого, пятого и шестого буферного запоминающего устройства, выходы которых соединены с входами первого, второго и третьего вычислителей оценки угловой скорости соответственно, выходы которых соединены со входом осредняющего устройства, выход которого соединен со вторым входом третьего переключающего устройства, выход которого соединен со входом модуля обработки информации, выход измерителя длины каротажного кабеля соединен со входом логического устройства, выход которого соединен со входом вычислителя направляющих косинусов, а корпус модуля датчиков первичной информации выполнен из немагнитных материалов.
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ РАЗВЕДОЧНЫХ СКВАЖИН | 1996 |
|
RU2109942C1 |
| Инклинометр | 1979 |
|
SU804822A1 |
| Гироскопический инклинометр | 1981 |
|
SU1002551A1 |
| Гироскопический инклинометр | 1988 |
|
SU1548423A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА СКВАЖИНЫ В ПОСЛЕДОВАТЕЛЬНЫХ ТОЧКАХ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1991 |
|
RU2030574C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ЗЕНИТНОГО УГЛА СКВАЖИНЫ И ГИРОСКОПИЧЕСКИЙ ИНКЛИНОМЕТР | 1996 |
|
RU2100594C1 |
| УСТРОЙСТВО ДЛЯ СОЕДИНЕНИЯ ГИБКИХ ТРУБ | 2013 |
|
RU2541366C1 |

