Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано для стабилизации уровня ложных тревог при обнаружении сигналов.
Уровень техники
Из уровня техники широко известен способ стабилизации уровня ложных помех при обнаружении сигналов, в котором осуществляют согласованную фильтрацию входного сигнала, прошедшего АЦП, последующее его амплитудное накопление и стабилизацию уровня ложных тревог, обнаруживая сигналы, превышающие пороговые значения.
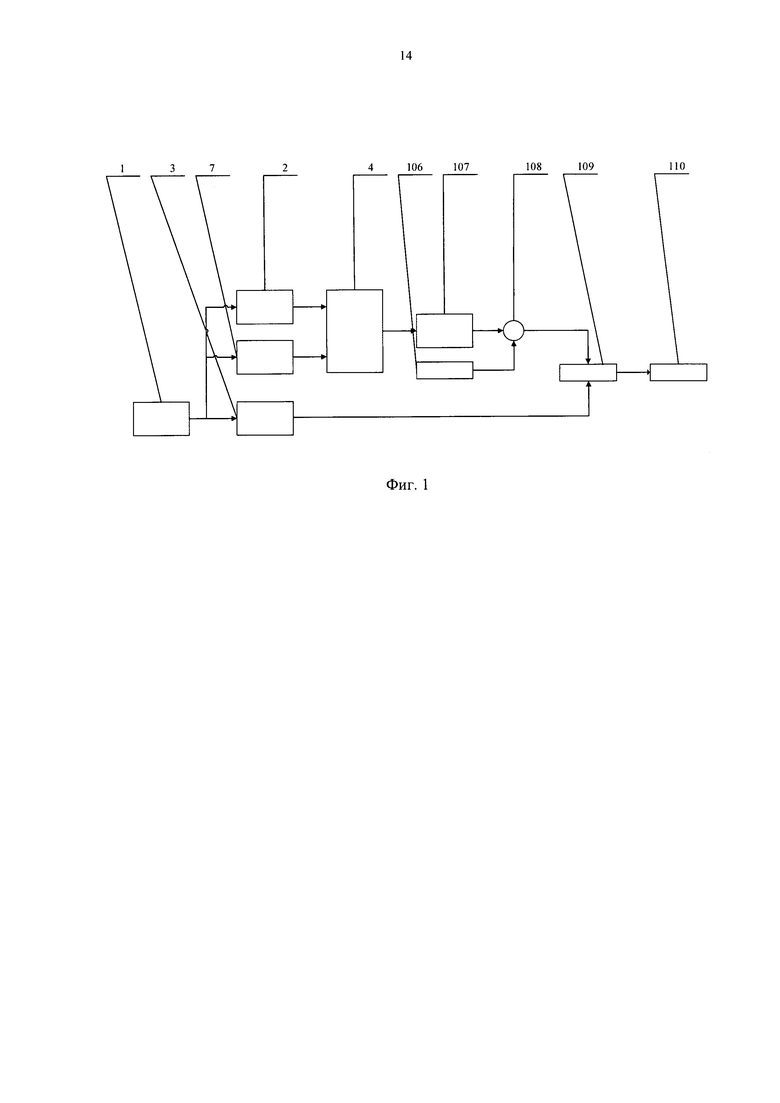
Типовая последовательность обнаружения эхо-сигналов представлена на Фиг. 1 и включает в себя: согласованную фильтрацию (СФ); амплитудное накопление, стабилизацию уровня ложных тревог и обнаружение целей, превышающих пороговые значения (Баскаков С.И. Радиотехнические цепи и сигналы: Учебник. - М.: Высш. школа., 1983).
Одним из наиболее сложных вопросов является стабилизация уровня ложных тревог, для которой применяется фильтрация сигнала, называемое фильтр скользящего среднего (СА - cell-averaging). Фильтр скользящего среднего осуществляет один проход по массиву значений, представляющих собой элементы по дальности. Используется два окна (слева и справа от исследуемого элемента) по 32 (тридцать два) элемента в каждом, а между усредняющими окнами исключаются 3 (три) элемента (исследуемый элемент, и по одному элементу справа и слева от исследуемого элемента). После чего происходит усреднение амплитуд 32 элементов окна.
Алгоритм работы фильтра приведен ниже:

Блок-схема такого устройства фильтрации показана на Фиг. 1.
В силу применяемой формулы (1) устройство имеет следующие недостатки:
- завышает формируемую величину порога, что не позволяет обнаруживать малозаметные цели на фоне мощных мешающих отражений;
- имеет большое количество ложных обнаружений при работе на кромках пассивных помех и в зоне боковых лепестков от мощных целей;
- имеет большое количество ложных обнаружений, при работе по протяженным пассивным помехам;
- имеет высокий порог при близкорасположенных целях, не всегда позволяет обнаружить вторую цель с меньшей амплитудой.
Раскрытие изобретения
Задача, на решение которой направлено заявляемое техническое решение, заключается в повышении уровня обнаружения малозаметных целей на фоне мощных мешающих отражений, уменьшении количества ложных помех при работе на кромках пассивных помех и в зоне боковых лепестков от мощных целей, уменьшении количества ложных обнаружений, при работе по протяженным пассивным помехам, и уменьшении порога при близкорасположенных целях, позволяя обнаружить вторую цель с меньшей амплитудой.
Техническим результатом заявляемого технического решения является изобретения повышение уровня правильного обнаружения малозаметных целей, уменьшение количества ложных помех и ложных обнаружений.
Заявленный технический результат достигается тем, что способ фильтрации сигналов при обнаружении цели заключается в том, что формируют начальный массив значений сигналов, представляющих собой элементы по дальности обнаружения цели, выраженные в значениях амплитуд сигналов; осуществляют четыре прохода по массиву значений сигналов для стабилизации уровня помех, где при первом проходе выполняют усреднение каждого значения сигнала начального массива значений путем использования двух усредняющих окон слева и справа от усредняемого значения, взятые через по меньшей мере одно значение от усредняемого, где каждое окно представляет собой по меньшей мере четыре значения массива сигналов, исключают по меньшей мере одно максимальное значение в окне, усредняют оставшиеся значения сигнала в окне и записывают в массив значений сигналов усредняемое значение, исходя из условия сравнения усредненных значений окон; при втором проходе выполняют усреднение значений сигнала массива значений после первого прохода за исключением первых по меньшей мере пяти значений путем использования усредняющего окна справа от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне, и записывают в массив значений сигналов новое усредняемое значение; при третьем проходе выполняют усреднение значений сигнала массива значений после второго прохода за исключением последних по меньшей мере пяти значений путем использования усредняющего окна слева от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне, и записывают в массив значений сигналов новое усредняемое значение; при четвертом проходе выполняют усреднение значений сигнала массива значений после третьего прохода путем сравнения каждого элемента с пороговым значением, которое получают усреднением последних тридцати значений массива значений; и осуществляют фильтрацию сигналов дальности обнаружения цели путем сравнения значений сигналов начального массива значений сигналов значениями сигналов массива значений, сформированного после четвертого прохода.
Дополнительной особенностью способа является то, что при первом проходе сравнение усредненных значений окон осуществляют так, что к удвоенному усредненному значению левого окна добавляют усредненное значение правого окна при меньшем значении левого окна или к удвоенному усредненному значению правого окна добавляют усредненное значение левого окна при равенстве этих значений окон или при большем усредненном значении в левом окне.
Дополнительной особенностью способа является то, что при четвертом проходе сравнение каждого значения массива с пороговым значением осуществляют так, что записывают отфильтрованное сравниваемое значение сигнала при его значении, которое меньше чем пороговое значение, или осуществляют дополнительное усреднение значения сигнала при его значении, которое больше или равно пороговому значению. При этом дополнительное усреднение значение сигнала осуществляют так, что используют два усредняющих окон слева и справа от усредняемого значения, взятые через по меньшей мере одно значение от усредняемого, где каждое окно представляет собой по меньшей мере десять значений массива сигналов, исключают по меньшей мере одно максимальное значение в окне, усредняют оставшиеся значения сигнала в окне и записывают в массив значений сигналов усредняемое значение, исходя из условия сравнения усредненных значений окон.
Дополнительной особенностью способа является то, что сравнение усредненных значений окон осуществляют так, что к удвоенному усредненному значению левого окна добавляют усредненное значение правого окна при меньшем значении левого окна или к удвоенному усредненному значению правого окна добавляют усредненное значение левого окна при равенстве этих значений окон или при большем усредненном значении в левом окне.
Заявленный технический результат также достигается тем, что устройство фильтрации сигналов при обнаружении цели содержит блок входного сигнала, к выходу которого подключены параллельно два фильтра скользящего среднего окна, сигнал с выхода которых поступает в сумматор, и компаратор, который сравнивает поступающий на него сигнал с сигналом из блока входного сигнала, отличающееся тем, что к выходу блока входного сигнала дополнительно подключены параллельно три фильтра скользящего среднего окна, сигналы с выхода двух фильтров поступают в компаратор, из которого с учетом сравнения с заранее заданным порогом поступает через умножитель в сумматор или напрямую в сумматор, с выхода которого поступает последовательно в шестой фильтр скользящего среднего окна, умножитель, седьмой фильтр скользящего окна, умножитель и компаратор, на второй вход которого подается сигнал с третьего из трех параллельно подключенных фильтров скользящего среднего окна через линию задержки, а на выходе компаратора с учетом сравнения с заранее заданным порогом сигнал далее поступает на дополнительный сумматор или на дополнительный компаратор, с выхода которого сигнал поступает в дополнительный сумматор, при этом на другой вход дополнительного компаратора поступает сигнал из сумматора, который соединен с упомянутыми двумя фильтрами скользящего среднего окна, подключенными к блоку входного сигнала, при этом упомянутый сигнал из сумматора дополнительно проходит через делитель, умножитель и линию задержки; сигнал с выхода дополнительного сумматора поступает в упомянутый компаратор, который сравнивает поступающий на него сигнал с сигналом из блока входного сигнала.
Краткое описание чертежей
Фиг. 1 - Блок-схема существующего устройства фильтрации сигнала, в котором 1 - блок входного сигнала; 3 - Линия задержки; 7 - Фильтр скользящего среднего окна №2; 2 - Фильтр скользящего среднего окна №1; 4 - Сумматор; 106 - Коэффициент домножения - К (табличное значение, рассчитываемое исходя из заданной вероятности ложной тревоги); 107 - Сдвиг; 108 - Умножитель; 109 - Компаратор; 110 - Признак сравнения пороговых значений и входного сигнала (0 или 1);
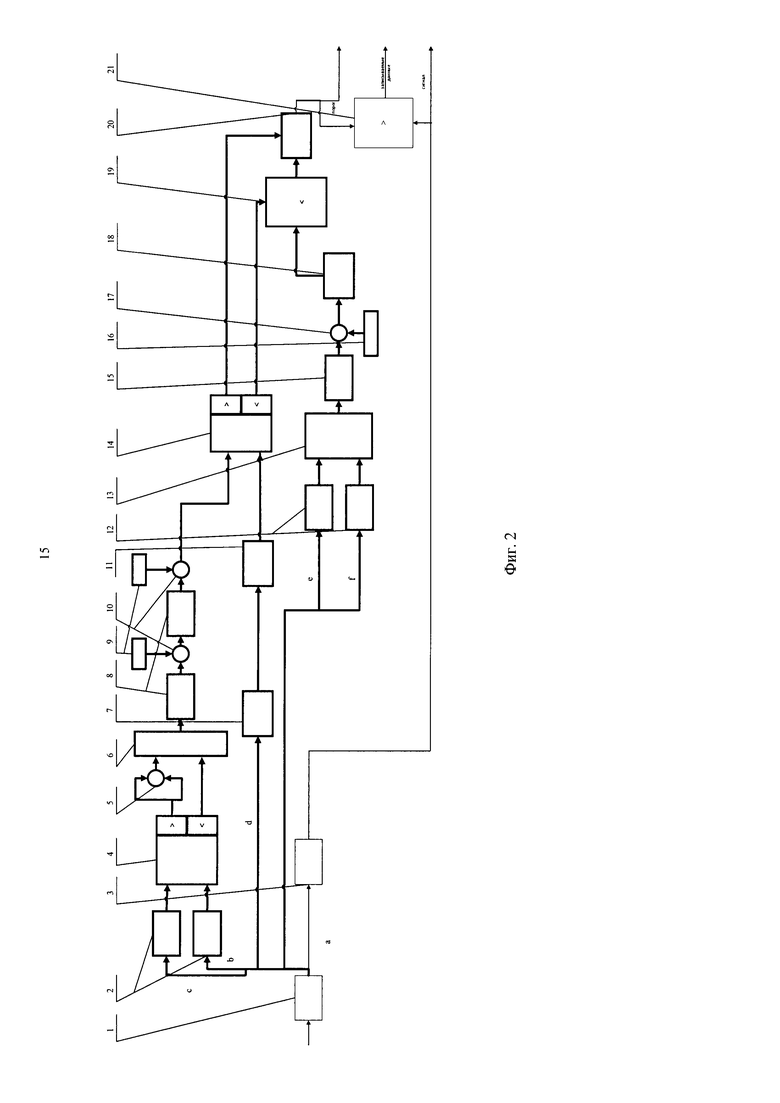
Фиг. 2 - Блок-схема заявленного устройства фильтрации сигнала, в котором 1 -Блок входного сигнала; 2 - Фильтр скользящего среднего окна №1; 3 - Линия задержки; 4 - Компаратор; 5 - Умножитель; 6 - Сумматор; 7 - Фильтр скользящего среднего окна №2; 8 - Фильтр скользящего среднего окна №3; 9 - Коэффициент домножения - К1 (табличное значение, рассчитываемое исходя из заданной вероятности ложной тревоги); 10 - Умножитель; 11 - Линия задержки; 12 - Фильтр скользящего среднего окна №3; 13 - Сумматор; 14 - Компаратор; 15 - Делитель; 16 - Коэффициент домножения - К2 (табличное значение, рассчитываемое исходя из заданной вероятности ложной тревоги); 17 - Умножитель; 18 - Линия задержки; 19 - Компаратор; 20 - Сумматор; 21 - Компаратор; а, b, с, d, е, f - шесть ветвей.
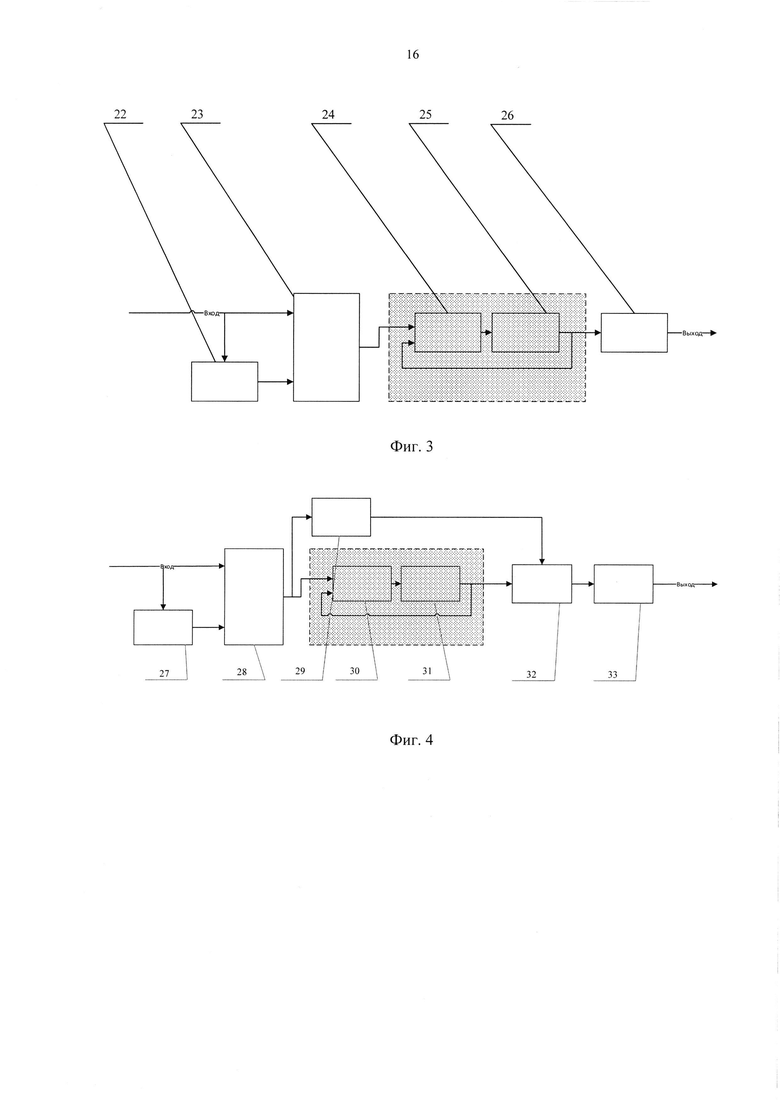
Фиг. 3 - Блок-схема фильтра скользящего среднего окна №4, в котором 22 - Линия задержки; 23 - Вычислитель; 24 - Сумматор; 25 - Линия задержки; 26 - Делитель.
Фиг. 4 - Блок-схема фильтра скользящего среднего окна №1, 2, 3, в котором 27 - Линия задержки; 28 - Вычислитель; 29 - Отбор по максимуму; 30 - Сумматор; 31 - Линия задержки; 32 - Вычитатель; 33 - Делитель.
Работа заявленного устройства фильтрации сигнала заключается в следующем. Осуществляют пять проходов по массиву значений, представляющих собой элементы по дальности. В первом проходе используется два окна (слева и справа от исследуемого элемента) по U элементов в каждом, а между усредняющими окнами исключаются R элемента (исследуемый элемент, и равное количество элементов справа и слева от исследуемого элемента). В каждом окне проводится отбрасывание Е максимальных значений, после чего происходит усреднение амплитуд, оставшихся элементов в окне. По оценкам, полученным в двух окнах, вычисляются величины в соответствие с формулами (6-7). Полученные значения используются во втором проходе, обрабатываются одним окном размером в W дискрет (исследуемый элемент, девять элементов слева). Из окна оценки исключается М элементов с максимальным значением и проводится усреднение оставшихся элементов в окне. Полученные значения во втором проходе используются в третьем проходе, обрабатываются одним окном размером в А дискрет (исследуемый элемент и остальные элементы справа). Из окна оценки исключается Р элементов с максимальным значением и проводится усреднение оставшихся девять элементов в окне.
Количество элементов в окнах, количество элементов между окнами и количество максимумов, записанные символьным обозначением, выбираются с учетом частоты дискретизации сигнала и типа сигнала. Например, для ЛЧМ сигнала на частоте дискретизации 1.2 МГц, параметры примут следующие значения U=5, R=3, Е=1, W=10, М=1, А=10, Р=1.
Пороговый коэффициент найден эмпирическим путем, при работе обнаружителя с Гауссовым шумом. Значение этого коэффициента соответствует вероятности ложной тревоги FA=10-6.
Алгоритм работы адаптивного фильтра скользящего среднего (САА - cell-averaging adaptive) приведен ниже:
В первом проходе первые шесть элементов по дальности имеют следующую оценку:

Последние шесть элементов в массиве а имеют следующую оценку:

Для внутренних элементов дальности в периоде при первом проходе r=6…n-6, где n - последний элемент массива, алгоритм вычисления значений оценки заключается в следующем.
Усреднение в отстающем (слева) и ведущем (справа) окнах без учета наибольшего значения в окне:


Если cr≥br, то для r-го элемента массива рассчитывается величина:

Если cr<br, то для г -го элемента массива рассчитывается величина:

При втором проходе для первых и последних десяти элементов Rr(1-W, n-W-n)=Yr(1-W, n-W-n), а с последующими проводятся следующие вычисления. Усреднение в окне без учета наибольшего значения в окне:

Умножение полученных значений на пороговый коэффициент K:

При третьем проходе для первых и последних десяти элементов Qr(1-А, n-А-n)=Rr(1-А, n-A-n), а с последующими проводится следующий алгоритм.
Усреднение величин в окне без учета наибольшего значения:

Умножение полученных значений на коэффициент K:

Для нахождения «уровня перехода» усредняют амплитуды последних тридцати дискрет дистанции:

где k - количество дискрет дистанции.
Выполним четвертый проход с использованием значений после третьего прохода, найденным «уровнем перехода» (YR) и исходным сигналом. Если значение оценки в дискрете по дальности после третьего прохода будет ниже «уровня перехода» Sr<YR, выполняется вычисление порога (Н) по алгоритму СА для исходного сигнала. Значения, пересчитываемые в четвертом проходе, назовем «двойственными».
Полученные «двойственные» значения используют для сравнения в пятом проходе с аналогичными значениями после третьего прохода, соответствующие выбранному дискрету. Из двух оценок для каждого дискрета выбирается минимальное (13), которое будет в конечном итоге составлять значения порога обнаружителя САА. Оценка для данного дискрета, которая после третьего прохода превышает «уровень перехода», остается неизменной.

Пороговые значения KN являются конечными для модернизированного (адаптивного) обнаружителя САА. Далее происходит сравнение сигнала после СФ и некогерентного накопления с пороговыми значениями KN и нахождение отметок превышений сигналом порога.
Предлагаемый вариант нового устройства фильтрации сигнала (Фиг. 2) содержит блок входного сигнала (1). Далее происходит разветвление входного сигнала и используется шесть параллельных потоков (а, b, с, d, е, f). Рассмотрим ветвь а, использующую блоки 3, 19. Блок 3 совершает задержку сигнала на время, требуемое для определения пороговых значений сигнала, которое подсчитываются в остальных каналах устройства. Блок 9 сравнивает значение оригинального сигнала с найденным пороговым значением сигнала для каждой дальности. Эти блоки идентичны блокам 2, 9, используемых в фильтре скользящего среднего. Остальные же блоки в ветвях полностью проработаны в новой конфигурации.
Рассмотрим блоки в ветви b и ветви с, которые вводятся на замену тех, что использованы в фильтр скользящего среднего окна. Блок 2 - «Фильтр скользящего среднего окна №1» используется для оценки среднего в окне размером пять дискрет с исключением максимального значения. Так как этот блок используется дважды в параллельных потоках, необходимо сказать, что их отличие между собой, это выбор расположения скользящего окна относительно исследуемого элемента по дальности. Получив усредненные значения амплитуд с блоков 2 сигнал поступает на блок 4, выполняющего функцию компаратора, передающего 2 выходных параметра - наибольшее и наименьшее значение. Наибольшее значение поступает на блок 5, где происходит перемножение числа на 2. Результат с блока 5 суммируется с наименьшим значением с блока 4 в блоке 6. Оценочные значения, полученные в блоке 6, поступают на блок 8 - «Фильтр скользящего среднего окна №3», который используется для оценки среднего в окне размером десять дискрет с исключением максимального значения. Результат, полученный в блоке 8, перемножается в блоке 10 на пороговый коэффициент k1 (блок 9), найденный эмпирическим путем, при работе нового устройства фильтрации сигнала с Гауссовым шумом. Значение этого коэффициента соответствует вероятности ложной тревоги FA=10-6. Далее операции, выполняемые в блоках 8, 10 повторяются, отличаясь только выбором расположения скользящего окна относительно исследуемого элемента по дальности.
Параллельно операциям, выполняемым в ветвях а, b, с, входные данные в ветви d поступают на блок 7 - «Фильтр скользящего среднего окна №2», который используется для оценки среднего в окне размером тридцать дискрет, после чего блок 11 осуществляет задержку посчитанного значения, до поступления данных с объединенных ветвей b, с на блок компаратора 14.
Параллельно операциям в ветвях а, b, с, d выполняются операции в ветвях е и f. Блок 12 - «Фильтр скользящего среднего окна №4» используется дважды для оценки среднего в окне размером тридцать два дискрета. Отличие блоков 12 в выборе расположения скользящего окна относительно исследуемого элемента по дальности. Далее ветви е, f объединяются и результаты с блоков 12 суммируются в блоке 13, усредняются в блоке 15 и перемножаются в блоке 17 на пороговый коэффициент k2 (блок 16), найденный статистическим моделированием, при работе фильтром скользящего среднего окна с Гауссовым шумом. Значение этого коэффициента соответствует вероятности ложной тревоги FA=10-6. Оценочные значения с блока 17 задерживаются в блоке 18 до появления данных на блоке 19 из компаратора (блок 14). После в блоке 19 происходит отбор требуемых наименьших значений по дальности, которые пройдут дальше на блок 20. Блок 20 мультиплексирует итоговые отобранные значения порога по дальности по следующему критерию - либо результат блока 14, если было выбрано большее значение, либо выход с блока 19, после чего они попадают на компаратор 21 с исходными входными данными из ветви а. Из блока компаратора 21 передаются значения сигнала превысившие пороговые значения в соответствие с их дальностями.
Необходимо отметить из чего состоит блок 12 - «Фильтр скользящего среднего окна №4», подробная схема показана на рисунке 6, 7. Входное значение в блоке 12 записывается в блок 22 «линия задержки» равной длине скользящего окна, а также поступает на вход вычитателя (блок 23). С выхода линии задержки на другой вход вычитателя поступает значение, задержанное на длину окна. Результат с блока 23 поступает на интегратор (блок 24 - сумматор, блок 25 - линия задержки). В блок 26 «делитель», поступает данные с интегратора, где происходит деление на количество суммированных элементов.
Блок 2, 7, 8 - «Фильтр скользящего среднего окна №1, 2, 3», подробная схема которого показана на Фиг. 4. Входное значение для блоков 2, 7, 8 записывается в блок 27 «линия задержки» равной длине скользящего окна, а также поступает на вход вычитателя (блок 28). С выхода линии задержки на другой вход вычитателя поступает значение, задержанное на длину окна. Результат с блока 28 поступает на интегратор (блок 30 - сумматор, блок 31 - линия задержки). В блок 32 «вычитатель», поступает данные с интегратора. Из блока 28 также параллельно данные поступают на блок 29 «отбор по максимуму», после чего максимальное значение с блока 29 поступает на блок 32, где вычитается из просуммированных значений на интеграторе. Результат поступает на блок 33 «делитель», где происходит деление на количество суммированных элементов.
Таким образом, заявленное устройство фильтрации сигнала не завышает формируемую величину порога, что позволяет обнаруживать малозаметные цели на фоне мощных мешающих отражений; обеспечивает меньшее количество ложных обнаружений при работе на кромках помех и в зоне боковых лепестков от мощных целей; обеспечивает меньшее количество ложных обнаружений, при работе по протяженным пассивным помехам; имеет значительно ниже порог при близкорасположенных целях, в отличие от обнаружителя СА, что позволяет уменьшить порог обнаружения с сохранением вероятности ложной тревоги и увеличением обнаружения малоразмерных целей на фоне мощных пассивных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ компенсации импульсных помех при обнаружении протяженных сигналов и устройство для его осуществления | 2017 |
|
RU2679010C1 |
| СПОСОБ ДВУХКАНАЛЬНОГО ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ СО СТАБИЛИЗАЦИЕЙ ВЕРОЯТНОСТИ ЛОЖНОЙ ТРЕВОГИ | 2015 |
|
RU2585257C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2178896C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НЕКОГЕРЕНТНОЙ ПАЧКИ СИГНАЛОВ С ПОСТОЯННЫМ УРОВНЕМ ЛОЖНЫХ ТРЕВОГ | 2008 |
|
RU2391681C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 2004 |
|
RU2262744C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ИМПУЛЬСА ОТ ЦЕЛИ И ИЗМЕРЕНИЯ ЕГО ПАМЕТРОВ | 2011 |
|
RU2524349C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1993 |
|
RU2039365C1 |
| СПОСОБ АДАПТИВНОГО ЦИФРОВОГО ОБНАРУЖЕНИЯ СИГНАЛОВ | 2002 |
|
RU2237258C2 |
| АТАКТОВЫЙ СТРОБ-ФРЕЙМ-ДИСКРЕТИЗАТОР СУБНАНОСЕКУНДНЫХ РАДИОИМПУЛЬСОВ | 2018 |
|
RU2685977C1 |
| Способ защиты эхо-сигналов от несинхронных импульсных помех в приемном канале радиолокационных станций и устройство для его осуществления | 2020 |
|
RU2736625C1 |
Изобретение относится к области радиолокации и может быть использовано для стабилизации уровня ложных тревог при обнаружении сигналов. Технический результат - повышение уровня правильного обнаружения малозаметных целей, уменьшение количества ложных помех и ложных обнаружений. Технический результат достигается тем, что формируют начальный массив значений сигналов, представляющих собой элементы по дальности обнаружения цели, выраженные в значениях амплитуд сигналов; осуществляют четыре прохода по массиву значений сигналов для стабилизации уровня помех, где при первом проходе выполняют усреднение каждого значения сигнала начального массива значений путем использования двух усредняющих окон слева и справа от усредняемого значения, взятых через по меньшей мере одно значение от усредняемого, где каждое окно представляет собой по меньшей мере четыре значения массива сигналов, исключают по меньшей мере одно максимальное значение в окне, усредняют оставшиеся значения сигнала в окне и записывают в массив значений сигналов усредняемое значение исходя из условия сравнения усредненных значений окон; при втором проходе выполняют усреднение значений сигнала массива значений после первого прохода, за исключением первых по меньшей мере пяти значений, путем использования усредняющего окна справа от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне и записывают в массив значений сигналов новое усредняемое значение; при третьем проходе выполняют усреднение значений сигнала массива значений после второго прохода, за исключением последних по меньшей мере пяти значений, путем использования усредняющего окна слева от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне и записывают в массив значений сигналов новое усредняемое значение; при четвертом проходе выполняют усреднение значений сигнала массива значений после третьего прохода путем сравнения каждого элемента с пороговым значением, которое получают усреднением последних тридцати значений массива значений, и осуществляют фильтрацию сигналов дальности обнаружения цели путем сравнения значений сигналов начального массива значений сигналов со значениями сигналов массива значений, сформированного после четвертого прохода. 2 н. и 4 з.п. ф-лы, 4 ил.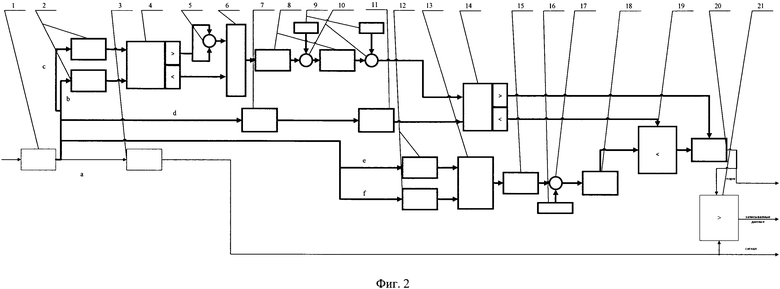
1. Способ фильтрации сигналов при обнаружении цели, заключающийся в том, что
формируют начальный массив значений сигналов, представляющих собой элементы по дальности обнаружения цели, выраженные в значениях амплитуд сигналов;
осуществляют четыре прохода по массиву значений сигналов для стабилизации уровня помех, где
при первом проходе выполняют усреднение каждого значения сигнала начального массива значений путем использования двух усредняющих окон слева и справа от усредняемого значения, взятых через по меньшей мере одно значение от усредняемого, где каждое окно представляет собой по меньшей мере четыре значения массива сигналов, исключают по меньшей мере одно максимальное значение в окне, усредняют оставшиеся значения сигнала в окне и записывают в массив значений сигналов усредняемое значение исходя из условия сравнения усредненных значений окон;
при втором проходе выполняют усреднение значений сигнала массива значений после первого прохода, за исключением первых по меньшей мере пяти значений, путем использования усредняющего окна справа от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне и записывают в массив значений сигналов новое усредняемое значение;
при третьем проходе выполняют усреднение значений сигнала массива значений после второго прохода, за исключением последних по меньшей мере пяти значений, путем использования усредняющего окна слева от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне и записывают в массив значений сигналов новое усредняемое значение;
при четвертом проходе выполняют усреднение значений сигнала массива значений после третьего прохода путем сравнения каждого элемента с пороговым значением, которое получают усреднением последних тридцати значений массива значений; и
осуществляют фильтрацию сигналов при обнаружении цели путем сравнения значений сигналов начального массива значений сигналов со значениями сигналов массива значений, сформированного после четвертого прохода.
2. Способ по п. 1, отличающийся тем, что при первом проходе сравнение усредненных значений окон осуществляют так, что к удвоенному усредненному значению левого окна добавляют усредненное значение правого окна при меньшем значении левого окна или к удвоенному усредненному значению правого окна добавляют усредненное значение левого окна при равенстве этих значений окон или при большем усредненном значении в левом окне.
3. Способ по п. 1, отличающийся тем, что при четвертом проходе сравнение каждого значения массива с пороговым значением осуществляют так, что записывают отфильтрованное сравниваемое значение сигнала при его значении, которое меньше чем пороговое значение, или осуществляют дополнительное усреднение значения сигнала при его значении, которое больше или равно пороговому значению.
4. Способ по п. 3, отличающийся тем, что дополнительное усреднение значения сигнала осуществляют так, что используют два усредняющих окна слева и справа от усредняемого значения, взятых через по меньшей мере одно значение от усредняемого, где каждое окно представляет собой по меньшей мере десять значений массива сигналов, исключают по меньшей мере одно максимальное значение в окне, усредняют оставшиеся значения сигнала в окне и записывают в массив значений сигналов усредняемое значение исходя из условия сравнения усредненных значений окон.
5. Способ по п. 4, отличающийся тем, что сравнение усредненных значений окон осуществляют так, что к удвоенному усредненному значению левого окна добавляют усредненное значение правого окна при меньшем значении левого окна или к удвоенному усредненному значению правого окна добавляют усредненное значение левого окна при равенстве этих значений окон или при большем усредненном значении в левом окне.
6. Устройство фильтрации сигналов при обнаружении цели, содержащее блок входного сигнала, к выходу которого подключены параллельно два фильтра скользящего среднего окна №1 и №2, сигнал с выхода которых поступает на компаратор, отличающееся тем, что к выходу блока входного сигнала дополнительно параллельно подключен второй фильтр скользящего среднего окна №1, сигналы из двух фильтров скользящего среднего окна №1 поступают в компаратор, из которого, с учетом сравнения, сигнал, больший по величине, поступает через умножитель в сумматор, а меньший - напрямую в сумматор, с выхода которого сигнал далее поступает последовательно в первый фильтр скользящего среднего окна №3, умножитель, второй фильтр скользящего окна №3, умножитель и второй компаратор, кроме того к выходу блока входного сигнала дополнительно подключены параллельно фильтр скользящего среднего окна №2 и два фильтра скользящего среднего окна №4; при этом на второй вход упомянутого второго компаратора подается сигнал с фильтра скользящего среднего окна №2 через линию задержки, а на выходе второго компаратора, с учетом сравнения, сигнал далее поступает на дополнительный сумматор или на дополнительный третий компаратор, с выхода которого сигнал поступает в дополнительный сумматор, при этом на другой вход дополнительного третьего компаратора поступает сигнал из сумматора, который соединен с упомянутыми двумя фильтрами скользящего среднего окна №4, подключенными к блоку входного сигнала, при этом упомянутый сигнал из сумматора дополнительно проходит через делитель, умножитель и линию задержки; сигнал с выхода дополнительного сумматора поступает в упомянутый дополнительный четвертый компаратор, который сравнивает поступающий на него сигнал с сигналом из блока входного сигнала.
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ МНОГОКОМПОНЕНТНЫХ ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2593146C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ УРОВНЯ ЛОЖНЫХ ТРЕВОГ ПОМЕХОЗАЩИЩЕННОГО РАДИОЛОКАЦИОННОГО ПРИЕМНИКА, РАСПОЛОЖЕННОГО НА ВОЗДУШНЫХ НОСИТЕЛЯХ | 1990 |
|
SU1840162A1 |
| Пневматический прибор для непрерывного измерения бумажных и тому подобных лент | 1949 |
|
SU86286A1 |
| WO 2003023436 A2, 20.03.2003 | |||
| JP 2010271140 A, 02.12.2010 | |||
| US 6650271 B1, 28.11.2003 | |||
| WО 2005069197 A1, 28.07.2005. | |||

