Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано для компенсации импульсных помех при обнаружении протяженных сигналов.
Уровень техники
Из уровня техники широко известен способ компенсации импульсных помех при обнаружении протяженных сигналов, в котором такой сигнал, прошедший аналого-цифровое преобразование (АЦП), проходит свертку с копией (комплексно-сопряженным сигналом) и стабилизацию уровня ложных тревог, а после чего и обнаружение. При таком подходе компенсация импульсных помех выполнена путем свертки.
Одним из наиболее сложных вопросов является компенсации импульсных помех при обнаружении протяженных сигналов, для которой применяется свертка. Сверткой подразумевается математическая операция, применяемая к исходному ЛЧМ сигналу S и его комплексно-сопряженной копии K, на выходе которой получается сжатый сигнал G (Баскаков С.И. Радиотехнические цепи и сигналы: Учебник. - М.: Высш. школа., 1983).
Алгоритм работы свертки приведен ниже:

Блок-схема свертки показана на Фиг.2.
В силу применяемой свертки и наличия импульсной помехи в принимаемом сигнале устройство имеет следующие недостатки:
- завышает мощность сигнала в зоне импульсной помехи на длительности ЛЧМ сигнала, что не позволяет обнаруживать малозаметные цели на фоне мощных импульсных помех;
- искажает амплитудно-фазовое распределение линейно частотно-модулированного сигнала (ЛЧМ) в дискретах, попадающих под влияние импульсной помехи, что делает не правдоподобным его доплеровскую (частотную) оценку;
Раскрытие изобретения
Техническая проблема, на решение которой направлено заявляемое техническое решение, заключается в повышении уровня обнаружения малозаметных целей на фоне мощных мешающих отражений, уменьшении влияния импульсных помех на полезный протяженный сигнал.
Техническим результатом изобретения является повышение уровня правильного обнаружения малозаметных целей, компенсация импульсных помех до применения согласованной фильтрации и предотвращение распространения влияния на протяженный сигнал.
Заявленный технический результат достигается тем, что в способе компенсации импульсных помех при обнаружении протяженных сигналов, заключающемся в том, что формируют начальный массив значений сигналов, представляющих собой элементы по дальности обнаружения цели, выраженные в значениях амплитуд сигналов осуществляют три прохода по массиву значений сигналов для стабилизации уровня помех, где при первом проходе выполняют усреднение каждого значения сигнала начального массива значений путем использования двух усредняющих окон слева и справа от усредняемого значения, взятые через по меньшей мере одно значение от усредняемого, где каждое окно представляет собой по меньшей мере четыре значения массива сигналов, исключают по меньшей мере одно максимальное значение в окне, усредняют оставшиеся значения сигнала в окне и записывают в массив значений сигналов усредняемое значение, исходя из условия сравнения усредненных значений окон; при втором проходе выполняют усреднение значений сигнала массива значений после первого прохода за исключением первых по меньшей мере пяти значений путем использования усредняющего окна справа от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне, и записывают в массив значений сигналов новое усредняемое значение; при третьем проходе выполняют усреднение значений сигнала массива значений после второго прохода за исключением последних по меньшей мере пяти значений путем использования усредняющего окна слева от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне, и записывают в массив значений сигналов новое усредняемое значение; и осуществляют фильтрацию протяженных сигналов путем сравнения значений сигналов начального массива значений сигналов и значений сигналов массива значений, сформированного после третьего прохода, с последующей компенсация импульсных помех, в случае превышения значений сигнала над пороговыми значениями.
Дополнительной особенностью способа является то, что при первом проходе сравнение усредненных значений окон осуществляют так, что к удвоенному усредненному значению левого окна добавляют усредненное значение правого окна при меньшем значении левого окна или к удвоенному усредненному значению правого окна добавляют усредненное значение левого окна при равенстве этих значений окон или при большем усредненном значении в левом окне.
Заявленный технический результат достигается также тем, что устройство компенсации импульсных помех, содержащее блок входного сигнала, к выходу которого подключены два фильтра скользящего среднего окна, отличающееся тем, что сигнал с выхода фильтров скользящего среднего окна поступает на компаратор, который сравнивает, поступающие на него сигналы с сигналом из блока входного сигнала, из которого, с учетом сравнения с заранее заданным порогом далее сигнал поступает через умножитель в сумматор или напрямую в сумматор, с выхода которого поступает последовательно на второй фильтр скользящего среднего окна, содержащий последовательно подключенные линию задержки, вычислитель, сумматор, линию задержки, делитель, далее сигнал поступает в умножитель, фильтр скользящего среднего окна, умножитель и компаратор, на второй вход которого подается, через линию задержки, сигнал с блока входных сигналов, блок замены амплитуд сигнала и блок выходного сигнала.
При этом устройство компенсации импульсных помех, содержащее блок входного сигнала, к выходу которого подключены два фильтра скользящего среднего окна, отличающееся тем, что сигнал с выхода фильтров скользящего среднего окна, поступает на компаратор, который сравнивает, поступающие на него сигналы с сигналом из блока входного сигнала, из которого, с учетом сравнения с заранее заданным порогом далее сигнал поступает через умножитель в сумматор или напрямую в сумматор, с выхода которого поступает последовательно на второй фильтр скользящего среднего окна, содержащий последовательно подключенные линию задержки, вычислитель, сумматор, линию задержки, делитель, далее сигнал поступает в умножитель, фильтр скользящего среднего окна, умножитель и компаратор, на второй вход которого подается, через линию задержки, сигнал с блока входных сигналов, блок замены амплитуд сигнала и блок выходного сигнала.
Краткое описание чертежей
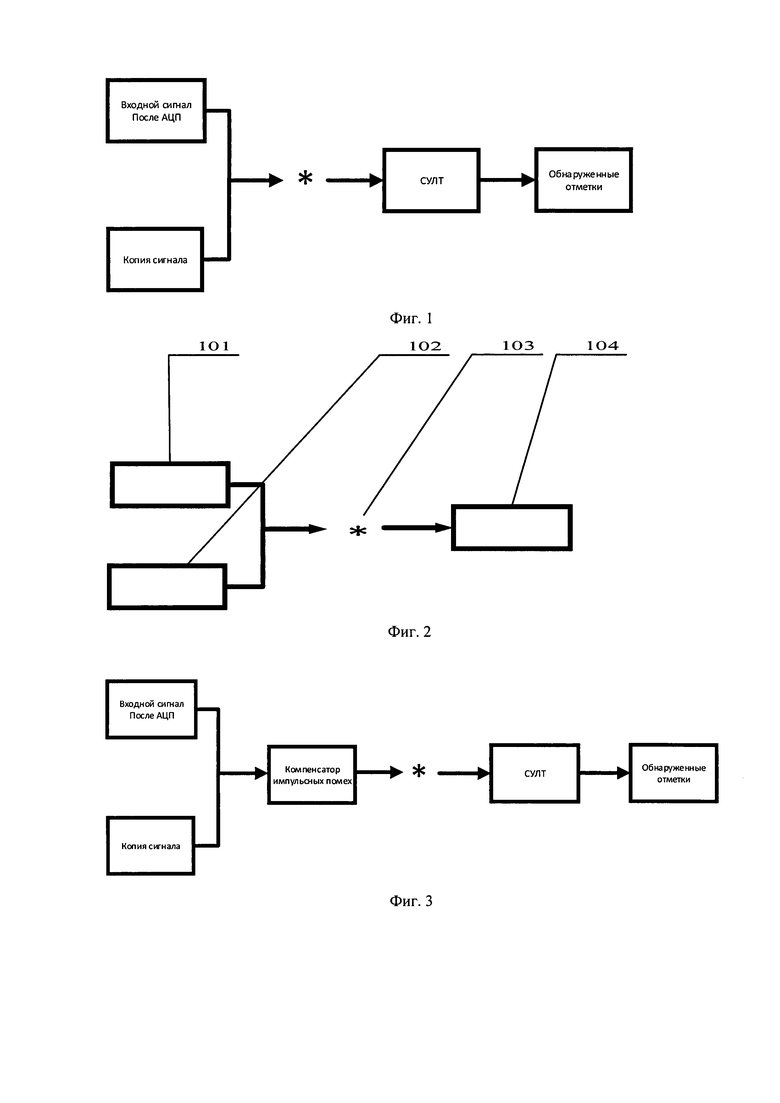
Фиг.1 - Алгоритм типовой последовательности обнаружения протяженных сигналов (например, ЛЧМ эхо-сигналов) после компенсации импульсных помех включает в себя: входной сигнал после АЦП, копию, свертку, стабилизацию уровня ложных тревог (СУЛТ) и обнаружение целей, превышающих пороговые значения.
Фиг.2 - Блок-схема используемого устройства фильтрации протяженного сигнала, в котором 101 - блок входного протяженного сигнала; 102 - блок копия (комплексно-сопряженный протяженный сигнал); 103 - блок свертки; 104 - блок сжатого сигнала.
Фиг.3 содержит алгоритм последовательности обнаружения протяженных сигналов после компенсации импульсных помех, которая содержит входной сигнал после АЦП, копию сигнала, компенсатор импульсных помех, СУЛТ, обнаруженные отметки.
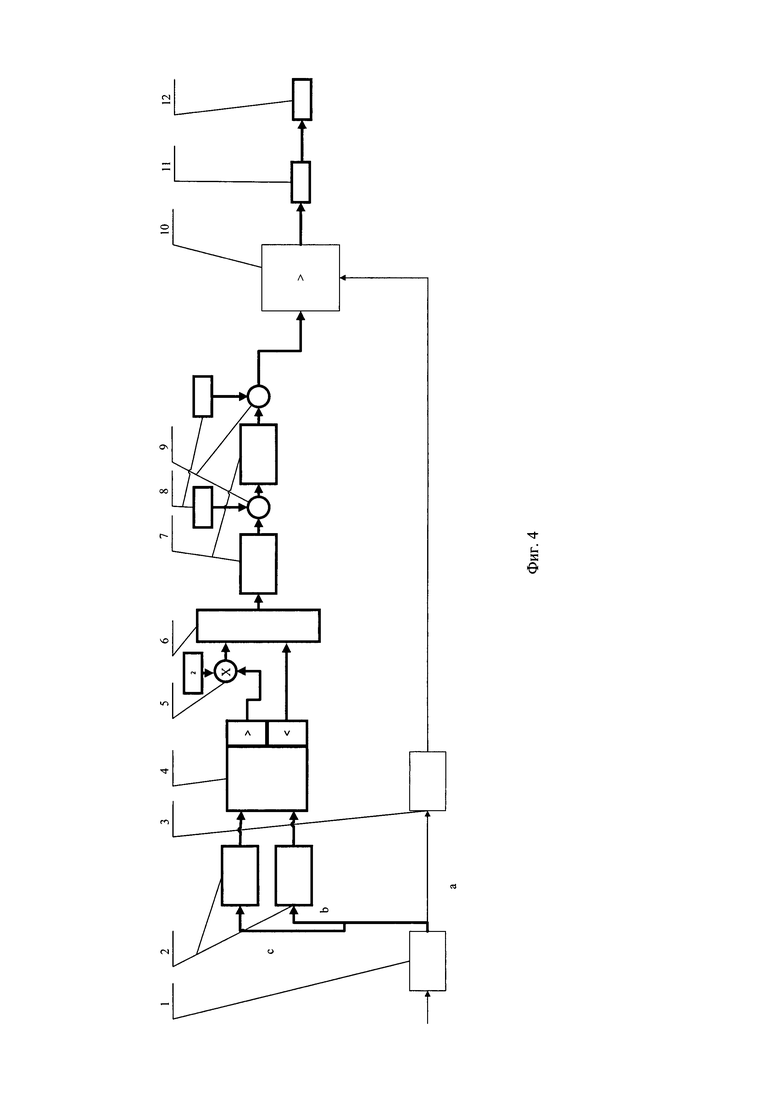
Фиг.4 - Блок-схема заявленного компенсатора импульсных помех, в котором 1 -Блок входного сигнала; 2 - Фильтр скользящего среднего окна №1; 3 - Линия задержки; 4 - Компаратор; 5 - Умножитель; 6 - Сумматор; 7 - Фильтр скользящего среднего окна №2; 8 - Коэффициент домножения - К-САА (табличное значение, рассчитываемое исходя из заданной вероятности ложной тревоги); 9 - Умножитель; 10 - Компаратор; 11 - Блок замены амплитуд сигнала, превысивших пороговые значения после выработки признака на блоке 10; 12 - блок выходного сигнала; а, b, с - три ветви прохождения входного сигнала.
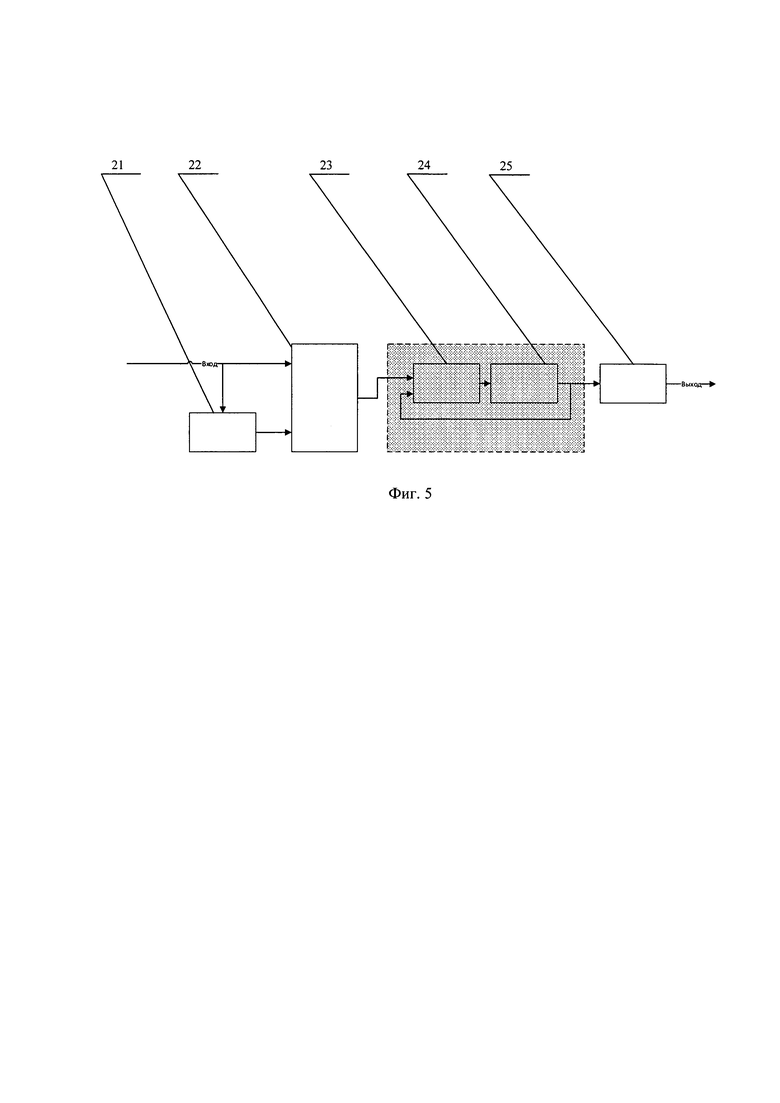
Фиг.5 - Блок-схема фильтра скользящего среднего окна, в котором 21 - Линия задержки; 22 - Вычислитель; 23 - Сумматор; 24 - Линия задержки; 25 - Делитель.
Работа заявленного устройства компенсации импульсных сигналов заключается в следующем. Осуществляют три прохода по массиву значений, представляющих собой элементы по дальности. В первом проходе используется два окна (слева и справа от исследуемого элемента) по U элементов в каждом, а между усредняющими окнами исключаются R элемента (исследуемый элемент, и равное количество элементов справа и слева от исследуемого элемента). В каждом окне проводится отбрасывание Е максимальных значений, после чего происходит усреднение амплитуд, оставшихся элементов в окне. По оценкам, полученным в двух окнах, вычисляются величины в соответствие с формулами (6-7). Полученные значения используются во втором проходе, обрабатываются одним окном размером в W дискрет (исследуемый элемент, девять элементов слева). Из окна оценки исключается М элементов с максимальным значением и проводится усреднение оставшихся элементов в окне. Полученные значения во втором проходе используются в третьем проходе, обрабатываются одним окном размером в А дискрет (исследуемый элемент и остальные элементы справа). Из окна оценки исключается Р элементов с максимальным значением и проводится усреднение оставшихся девять элементов в окне. После этого выполняется сравнение порогового значения (выходные значения третьего прохода) и значений входного сигнала. В случае превышения значений сигнала над пороговыми, они меняются на шумовые значения сигнала, заранее определенные в системе.
Количество элементов в окнах, количество элементов между окнами и количество максимумов, записанные символьным обозначением, выбираются с учетом частоты дискретизации сигнала и типа сигнала. Например, для ЛЧМ сигнала на частоте дискретизации 1.2 МГц, параметры примут следующие значения U=5, R=3, E=1, W=10, М=1, А=10, Р=1.
Пороговый коэффициент найден эмпирическим путем, при работе обнаружителя с Гауссовым шумом. Значение этого коэффициента соответствует вероятности ложной тревоги FA=10-б.
Алгоритм работы компенсации импульсных помех (КИП) приведен ниже:
В первом проходе первые шесть элементов по дальности имеют следующую оценку:

Последние шесть элементов в массиве а имеют следующую оценку:

Для внутренних элементов дальности в периоде при первом проходе r=6 … n-6, где n - последний элемент массива, алгоритм вычисления значений оценки заключается в следующем.
Усреднение в отстающем (слева) и ведущем (справа) окнах без учета наибольшего значения в окне:


Если cr≥br, то для r-го элемента массива рассчитывается величина:

Если cr<br, то для r-го элемента массива рассчитывается величина:

При втором проходе для первых и последних десяти элементов Rr(1-W,n-W-n)=Yr(1-W,n-W-n), а с последующими проводятся следующие вычисления.
Усреднение в окне без учета наибольшего значения в окне:

Умножение полученных значений на пороговый коэффициент K:

При третьем проходе для первых и последних десяти элементов Qr(1-А, n-А-n)=Rr(1-А,n-A-n), а с последующими проводится следующий алгоритм.
Усреднение величин в окне без учета наибольшего значения:

Умножение полученных значений на коэффициент K:

Рассчитанные элементы вектор-массива Sr, далее используются как пороговые значения, с которыми сравнивается сигнал после АЦП. В случае, если в каком-либо элементе по дальности амплитуда сигнала после АЦП будет превышать пороговое значение, то он заменяется на случайное шумовое значение (считается, что математическое ожидание и дисперсия шума в приемном тракте известна и являются постоянными значениями).
Предлагаемый вариант нового устройства компенсации импульсных помех (Фиг.4) содержит блок входного сигнала (1). Далее происходит разветвление входного сигнала и используется шесть параллельных потоков (а, b, с). Рассмотрим ветвь а, использующую блоки 1, 3, 10. Блок 3 совершает задержку сигнала на время, требуемое для определения пороговых значений сигнала, которое подсчитываются в остальных каналах устройства. Блок 10 сравнивает значение оригинального сигнала с найденным пороговым значением сигнала для каждой дальности.
Рассмотрим блоки в ветви b и ветви с, которые вводятся на замену тех, что использованы в фильтр скользящего среднего окна. Блок 2 - «Фильтр скользящего среднего окна №1» используется для оценки среднего в окне размером в U дискрет с исключением Е максимальных значений. Так как этот блок используется дважды в параллельных потоках, необходимо сказать, что их отличие между собой, это выбор расположения скользящего окна относительно исследуемого элемента по дальности. Получив усредненные значения амплитуд с блоков 2 сигнал поступает на блок 4, выполняющего функцию компаратора, передающего 2 выходных параметра - наибольшее и наименьшее значение. Наибольшее значение поступает на блок 5, где происходит перемножение числа на 2. Результат с блока 5 суммируется с наименьшим значением с блока 4 в блоке 6. Оценочные значения, полученные в блоке 6, поступают на блок 7 -«Фильтр скользящего среднего окна №2», который используется для оценки среднего в окне размером W дискрет с исключением М максимальных значений. Результат, полученный в блоке 7, перемножается в блоке 9 на пороговый коэффициент kl (блок 9), найденный эмпирическим путем, при работе нового устройства фильтрации сигнала с Гауссовым шумом. Значение этого коэффициента соответствует вероятности ложной тревоги FA=10-6. Далее операции, выполняемые в блоках 7, 9 повторяются, отличаясь только выбором расположения скользящего окна относительно исследуемого элемента по дальности.
Блок 2,1 - «Фильтр скользящего среднего окна №1, 2», подробная схема которого показана на Фиг.5. Входное значение для блоков 2, 7 записывается в блок 22 «линия задержки» равной длине скользящего окна, а также поступает на вход вычитателя (блок 23). С выхода линии задержки на другой вход вычитателя поступает значение, задержанное на длину окна. Результат с блока 23 поступает на интегратор (блок 24 - сумматор, блок 25 - линия задержки). В блок 26 «делитель», поступает данные с интегратора, где происходит деление на количество суммированных элементов.
Таким образом, заявленное устройство компенсации импульсных помех, исключает попадание импульсных помех на свертку и амплитудно-фазовое искажение от них. Что, тем самым не завысит формируемую величину порога и позволит обнаруживать малозаметные цели.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ фильтрации сигналов при обнаружении цели и устройство для его осуществления | 2017 |
|
RU2678822C2 |
| Способ защиты от узкополосных и импульсных помех для цифрового приёмника | 2018 |
|
RU2695542C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕЛЕНГА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2520074C1 |
| Способ согласованной нелинейной корреляционно-вероятностной фильтрации сигналов и устройство для его реализации | 2018 |
|
RU2723441C2 |
| Способ защиты эхо-сигналов от несинхронных импульсных помех в приемном канале радиолокационных станций и устройство для его осуществления | 2020 |
|
RU2736625C1 |
| АДАПТИВНЫЙ ДВУМЕРНЫЙ СПОСОБ РАЗМНОЖЕНИЯ ОЦЕНОК И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2010 |
|
RU2461874C2 |
| ЦИФРОВОЙ СОГЛАСОВАННЫЙ ФИЛЬТР СИГНАЛОВ С ДИСКРЕТНОЙ ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ | 1990 |
|
RU2022485C1 |
| СЕЙСМИЧЕСКОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 2004 |
|
RU2262744C1 |
| Устройство для корреляционного анализа | 1985 |
|
SU1332332A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ УРОВНЯ ЛОЖНЫХ ТРЕВОГ ПОМЕХОЗАЩИЩЕННОГО РАДИОЛОКАЦИОННОГО ПРИЕМНИКА, РАСПОЛОЖЕННОГО НА ВОЗДУШНЫХ НОСИТЕЛЯХ | 1990 |
|
SU1840162A1 |
Изобретение относится к области радиолокации и может быть использовано для компенсации помех при обнаружении протяженных сигналов. Техническим результатом изобретения является повышение уровня правильного обнаружения малозаметных целей, компенсация импульсных помех до применения согласованной фильтрации и предотвращение распространения влияния на протяженный сигнал. В способе компенсации импульсных помех выполняют три прохода скользящими окнами над входными сигналом. Количество проходов выбрано специально таким образом, чтобы различать импульсные всплески амплитуды сигнала в элементах входного массива, которые будут явно выделяться от расположенных рядом элементов массива. Первый проход предназначен для оценки среднего в окнах малого размера справа и слева от выбранного элемента. Малый размер окон, например 4-6 элементов, позволит отследить резкие переходы по амплитуде между соседними элементами. Результат после первого прохода будет иметь высокую дисперсию у близкорасположенных элементов массива. Второй проход использует всего одно скользящее окно усреднения, направленное в левую сторону, что позволяет понизить дисперсию близкорасположенных значений после первого прохода с учетом амплитуд элементов, находящихся с левой стороны. В третьем проходе используется аналогичное скользящее окно усреднение, как во втором проходе, только элементы усреднения в окне сгруппированы справа от исследуемого элемента массива. Далее пороговые значения, сформированные после третьего прохода, можно использовать для выработки признаков на входном массиве элементов, где необходимо провести компенсацию импульсных помех. 2 н. и 1 з.п ф-лы, 5 ил.
1. Способ компенсации импульсных помех при обнаружении протяженных сигналов, заключающийся в том, что формируют начальный массив значений сигналов, представляющих собой элементы по дальности обнаружения цели, выраженные в значениях амплитуд сигналов;
осуществляют три прохода по массиву значений сигналов для стабилизации уровня помех, где
при первом проходе выполняют усреднение каждого значения сигнала начального массива значений путем использования двух усредняющих окон слева и справа от усредняемого значения, взятых через по меньшей мере одно значение от усредняемого, где каждое окно представляет собой по меньшей мере четыре значения массива сигналов, исключают по меньшей мере одно максимальное значение в окне, усредняют оставшиеся значения сигнала в окне и записывают в массив значений сигналов усредняемое значение, исходя из условия сравнения усредненных значений окон;
при втором проходе выполняют усреднение значений сигнала массива значений после первого прохода за исключением первых по меньшей мере пяти значений путем использования усредняющего окна справа от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне и записывают в массив значений сигналов новое усредняемое значение;
при третьем проходе выполняют усреднение значений сигнала массива значений после второго прохода за исключением последних по меньшей мере пяти значений путем использования усредняющего окна слева от усредняемого значения, где окно представляет собой по меньшей мере шесть значений, включая усредняемое, исключают по меньшей мере одно максимальное значение в окне и записывают в массив значений сигналов новое усредняемое значение;
и осуществляют фильтрацию протяженных сигналов путем сравнения значений сигналов начального массива значений сигналов и значений сигналов массива значений, сформированного после третьего прохода с последующей компенсация импульсных помех, в случае превышения значений сигнала над пороговыми значениями.
2. Способ по п. 1, отличающийся тем, что при первом проходе сравнение усредненных значений окон осуществляют так, что к удвоенному усредненному значению левого окна добавляют усредненное значение правого окна при меньшем значении левого окна или к удвоенному усредненному значению правого окна добавляют усредненное значение левого окна при равенстве этих значений окон или при большем усредненном значении в левом окне.
3. Устройство компенсации импульсных помех, содержащее блок входного сигнала, к выходу которого подключены два фильтра скользящего среднего окна, отличающееся тем, что сигнал с выхода фильтров скользящего среднего окна поступает на компаратор, который сравнивает поступающие на него сигналы с сигналом из блока входного сигнала, из которого с учетом сравнения с заранее заданным порогом далее сигнал поступает через умножитель в сумматор или напрямую в сумматор, с выхода которого поступает последовательно на второй фильтр скользящего среднего окна, содержащий последовательно подключенные линию задержки, вычислитель, сумматор, линию задержки, делитель, далее сигнал поступает в умножитель, фильтр скользящего среднего окна, умножитель и компаратор, на второй вход которого подается через линию задержки сигнал с блока входных сигналов, блок замены амплитуд сигнала и блок выходного сигнала.
| СПОСОБ БОРЬБЫ С ИМПУЛЬСНЫМИ ПОМЕХАМИ НА ОСНОВЕ ИХ ЛОКАЛИЗАЦИИ С ПРИМЕНЕНИЕМ MIN-MAX ПОРОГА В АДАПТИВНЫХ СИСТЕМАХ ПРИЕМА РАДИОСИГНАЛОВ | 2012 |
|
RU2519041C2 |
| УСТРОЙСТВО ДЛЯ СГЛАЖИВАНИЯ ИМПУЛЬСНОЙ ПОМЕХИ | 1991 |
|
RU2024056C1 |
| СПОСОБ ЗАЩИТЫ ОТ ИМПУЛЬСНЫХ ПОМЕХ ПРИ ОБНАРУЖЕНИИ СЛОЖНЫХ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2005 |
|
RU2308047C2 |
| СПОСОБ АДАПТИВНОГО ОБНАРУЖЕНИЯ СИГНАЛОВ ДВИЖУЩИХСЯ ЦЕЛЕЙ НА ФОНЕ МНОГОКОМПОНЕНТНЫХ ПАССИВНЫХ ПОМЕХ | 2015 |
|
RU2593146C1 |
| US 6650271 B1, 18.11.2003. | |||

