Изобретение относится к радиолокационным системам (РЛС), преимущественно, к РЛС со сложными, в частности фазоманипулированными сигналами, используемым на подвижных носителях и предназначенным для обнаружения и сопровождения моноимпульсным способом сигналов от целей при наличии отражений от местных предметов.
В используемых в настоящее время моноимпульсных радиолокаторах, предназначенных для обнаружения и сопровождения целей, принимаемые высокочастотные сигналы после суммарно-разностного преобразования подаются на смесители суммарного и разностного каналов и затем на усилители промежуточной частоты, с выходов которых сигналы поступают на амплитудный детектор в суммарном канале и на фазовый детектор в разностном канале. В результате фазового детектирования образуется сигнал углового рассогласования, используемый для углового сопровождения [1, с. 22, рис. 1.9] , [2, с. 20, рис. 15] . Сигнал суммарного канала поступает на временной дискриминатор, в котором образуется сигнал для сопровождения по дальности.
Недостатком этих устройств является низкая помехозащищенность по отношению к активным и пассивным помехам и соответственно низкая точность сопровождения. Активные помехи приводят к обнаружению ложных целей и маскированию целей настоящих. Пассивные помехи в виде отражений от местных предметов также маскируют полезный сигнал ввиду невозможности реализовать высокое разрешение по углу на больших дальностях при ограниченных размерах радиолокаторов, устанавливаемых на подвижных носителях, которые вследствие этого имеют широкую диаграмму направленности антенны.
Известно устройство [3] , которое использует для работы сложные фазоманипулированные (далее по тексту ФМ) сигналы и содержит цифровые фильтры сжатия бинарно квантованных сигналов, поступающих с выходов фазовых детекторов по две квадратуры в суммарном и разностном каналах. Выходные сигналы одноименных квадратур суммарного и разностного каналов поступают на умножители для перемножения одноименных квадратур, а полученные произведения подаются на сумматор для исключения влияния случайной начальной фазы. Выходной сигнал сумматора квантуется на три уровня, определяющие выходной сигнал углового рассогласования, по которому может вестись сопровождение цели.
Помехоустойчивость этого устройства по отношению к активным импульсным помехам несколько повышена по сравнению с рассмотренными ранее РЛС вследствие использования сложного ФМ сигнала.
Недостатком устройства является его низкая помехоустойчивость по отношению к пассивным помехам, например, в виде отражений от местных предметов, что обусловлено низкой угловой разрешающей способностью радиолокаторов на подвижных объектах, имеющих существенные массогабаритные ограничения. Вследствие этого помеховый сигнал проходит через фильтр сжатия и снижает точность углового сопровождения цели.
Известна РЛС [4] , которая наиболее близка по технической сущности к предлагаемому устройству и принята в качестве прототипа. РЛС содержит последовательно включенные генератор кода, фазовый манипулятор, усилитель мощности, антенный переключатель и антенну, последовательно включенные суммарно-разностный преобразователь, усилитель высокой частоты, смеситель, усилитель промежуточной частоты, а также возбудитель, импульсный модулятор, привод антенны, блоки фазовых детекторов суммарного и разностного сигналов, амплитудные квантователи, цифровые согласованные фильтры бинарно квантованных сигналов, блок объединения квадратур, устройство первичной обработки информации, включающее дискриминатор дальности и преобразователь кода во временной интервал в составе дальномера, дискриминатор угла, интегратор, блок измерения интенсивности, и устройство вторичной обработки информации.
Благодаря применению сложных ФМ сигналов и цифровых согласованных фильтров эта РЛС имеет хорошую помехозащищенность по отношению к активным помехам.
Недостатком РЛС по прототипу является низкая помехоустойчивость по отношению к пассивным помехам, в частности к мощным отражениям от местных предметов при работе по наземным целям. Использование длиннобазовых сигналов приводит к взаимному влиянию близко расположенных по дальности объектов и возможному подавлению сигнала от цели помеховыми сигналами при ее обнаружении за счет снижения разрешающей способности по дальности. Низкое угловое разрешение антенн таких РЛС, устанавливаемых на подвижных носителях, приводит к попаданию мощного помехового сигнала в приемный канал РЛС, который проходит на выход цифровых согласованных фильтров и снижает помехоустойчивость РЛС и точность сопровождения целей с помощью дискриминатора угла и интегратора. В частности, когда в луч антенны попадает одновременно цель и помеховые объекты, могут происходить срывы сопровождения цели и ложные переходы РЛС с сопровождения цели на сопровождение помехи. При этом одновременно снижается точность сопровождения.
Технической задачей изобретения является повышение разрешающей способности обнаружения целей, точности и помехозащищенности сопровождения целей по отношению к активным и пассивным помехам при установке РЛС на подвижном носителе.
Для достижения заявленного технического результата предлагается при обработке длиннобазовых фазоманипулированных сигналов с квадратурных выходов фазовых детекторов суммарного сигнала применять адаптивное многоуровневое квантование сигнала с подстройкой порогов квантования при захвате цели на сопровождение, измерять допплеровскую составляющую сигнала путем узкополосной допплеровской фильтрации, а при сопровождении цели замыкать с помощью узкополосных частотных фильтров контуры сопровождения по допплеровской составляющей сигнала и по дальности в суммарном канале, а выходные квадратурные составляющие узкополосного сигнала цели в разностном канале нормировать к одноименным квадратурным составляющим в суммарном канале и полученную оценку углового рассогласования использовать для контура углового сопровождения цели.
Сущность изобретения заключается в том, что в моноимпульсную радиолокационную систему, содержащую последовательно соединенные возбудитель, фазовый манипулятор и усилитель мощности, подключенный через антенный переключатель к антенне, которая кинематически связана с приводом антенны, последовательно соединенные соответствующими входами-выходами суммарного и разностного сигналов суммарно-разностный преобразователь, подключенный к третьему плечу антенного переключателя, усилитель высокой частоты, смеситель и усилитель промежуточной частоты, к соответствующим выходам которого подключены блок квадратурных фазовых детекторов суммарного сигнала и блок квадратурных фазовых детекторов разностного сигнала, синусный и косинусный выходы которого через амплитудный квантователь подключены к соответствующим информационным входам цифрового согласованного фильтра, а также импульсный модулятор и генератор кода, подключенные к выходу запускающих импульсов синхронизатора, блок объединения квадратур, дискриминатор сигнала дальности и преобразователь кода во временной интервал, при этом кодовые входы цифрового согласованного фильтра и фазового манипулятора подключены к выходу генератора кода, выходы гетеродинной и промежуточной частоты возбудителя подключены соответственно к гетеродинному входу смесителя и опорным входам блоков квадратурных фазовых детекторов суммарного и разностного сигналов, а выход импульсного модулятора подключен ко второму входу усилителя мощности, введены первый и второй блоки компараторов, первый и второй автоматические регуляторы порога, первый и второй многоразрядные согласованные фильтры, блок обнаружения и выбора цели, датчик углового положения антенны, кинематически связанный с приводом антенны, управляющий вход которого подключен к выходу коммутатора управляющих сигналов, регистр угла, регистр дальности, блок захвата цели, первый, второй, третий, четвертый, пятый и шестой фильтры допплеровской частоты, первый второй и третий генераторы допплеровской частоты, первый и второй вычитатели, регистр, первый, второй третий и четвертый сумматоры, кодовая шина, блок вентилей, частотный дискриминатор, первый и второй делители кода, первый и второй элементы задержки и счетчик дальности, обнуляющий вход которого объединен со входами запуска блока обнаружения и выбора цели и преобразователя кода во временной интервал и подключен к выходу запускающих импульсов синхронизатора, выход синхронизирующих импульсов которого подключен ко входам синхронизации первого и второго автоматических регуляторов порога, блока обнаружения и выбора цели, блока захвата цели и счетчика дальности, выход которого подключен к первому входу блока обнаружения и выбора цели, второй вход которого соединен с выходом блока объединения квадратур, третий - с выходом датчика углового положения антенны, первый и второй выходы подключены ко входам записи соответственно регистра угла и регистра дальности, третий выход подключен к первому входу коммутатора управляющих сигналов, а четвертый выход - к управляющим входам коммутатора управляющих сигналов, блока захвата цели, регистра дальности и регистра угла, выход которого подключен к первому входу первого вычитателя, второй вход которого соединен с выходом блока вентилей, а выход - со вторым входом коммутатора управляющих сигналов, выход регистра дальности подключен к первому входу первого сумматора, второй вход которого соединен с выходом дискриминатора сигнала дальности, а выход - с информационным входом преобразователя кода во временной интервал, к выходу генератора кода подключены кодовые входы первого и второго многоразрядных согласованных фильтров, входы которых, объединенные со входами соответственно первого и второго автоматических регуляторов порога, подключены к выходам соответственно первого и второго блоков компараторов, первые входы которых подключены соответственно к синусному и косинусному выходам блока квадратурных фазовых детекторов суммарного сигнала, а вторые входы соединены с выходами соответственно первого и второго автоматических регуляторов порога, к выходам первого и второго многоразрядных согласованных фильтров подключены соответственно синусные и косинусные информационные входы блока объединения квадратур, блока захвата цели и фильтров допплеровской частоты с первого по пятый, синусный и косинусный выходы первого и второго генераторов допплеровской частоты подключены к одноименным частотным входам соответственно четвертого и пятого фильтров допплеровской частоты, а синусный и косинусный выходы третьего генератора допплеровской частоты - к одноименным частотным входам первого, второго, третьего и шестого фильтров допплеровской частоты, синусный и косинусный информационные входы шестого фильтра допплеровской частоты подключены к соответствующим выходам цифрового согласованного фильтра, выход преобразователя кода во временной интервал подключен ко входу синхронизации первого фильтра допплеровской частоты и входу первого элемента задержки, выход которого подключен ко входам синхронизации второго, четвертого, пятого и шестого фильтров допплеровской частоты, входу запуска блока захвата цели и входу второго элемента задержки, выход которого подключен ко входу синхронизации третьего фильтра допплеровской частоты, синусные выходы второго и шестого фильтров допплеровской частоты подключены соответственно ко второму и первому входам первого делителя кода, а их косинусные выходы - ко второму и первому входам второго делителя кода, модульный выход второго фильтра допплеровской частоты подключен ко вторым входам дискриминатора сигнала дальности и частотного дискриминатора, модульные выходы первого и третьего фильтров допплеровской частоты подключены соответственно к первому и третьему входам дискриминатора сигнала дальности, модульные выходы четвертого и пятого фильтров допплеровской частоты подключены соответственно к первому и третьему входам частотного дискриминатора, выход которого подключен ко второму входу второго сумматора, первый вход которого соединен с выходом регистра, а выход подключен к кодовому входу третьего генератора допплеровской частоты и к первым входам второго вычитателя и третьего сумматора, вторые входы которых подключены к кодовой шине, выходы второго вычитателя и третьего сумматора подключены к кодовым входам первого и второго генераторов допплеровской частоты соответственно, выходы первого и второго делителей кода подключены к соответствующим входам четвертого сумматора, выход которого подключен ко входу блока вентилей, управляющий вход которого объединен со входом синхронизации регистра и подключен к управляющему выходу блока захвата цели, информационный выход которого подключен ко входу записи регистра.
Сущность изобретения поясняется дальнейшим описанием и чертежами, на которых представлены:
фиг. 1 - структурная схема моноимпульсной РЛС;
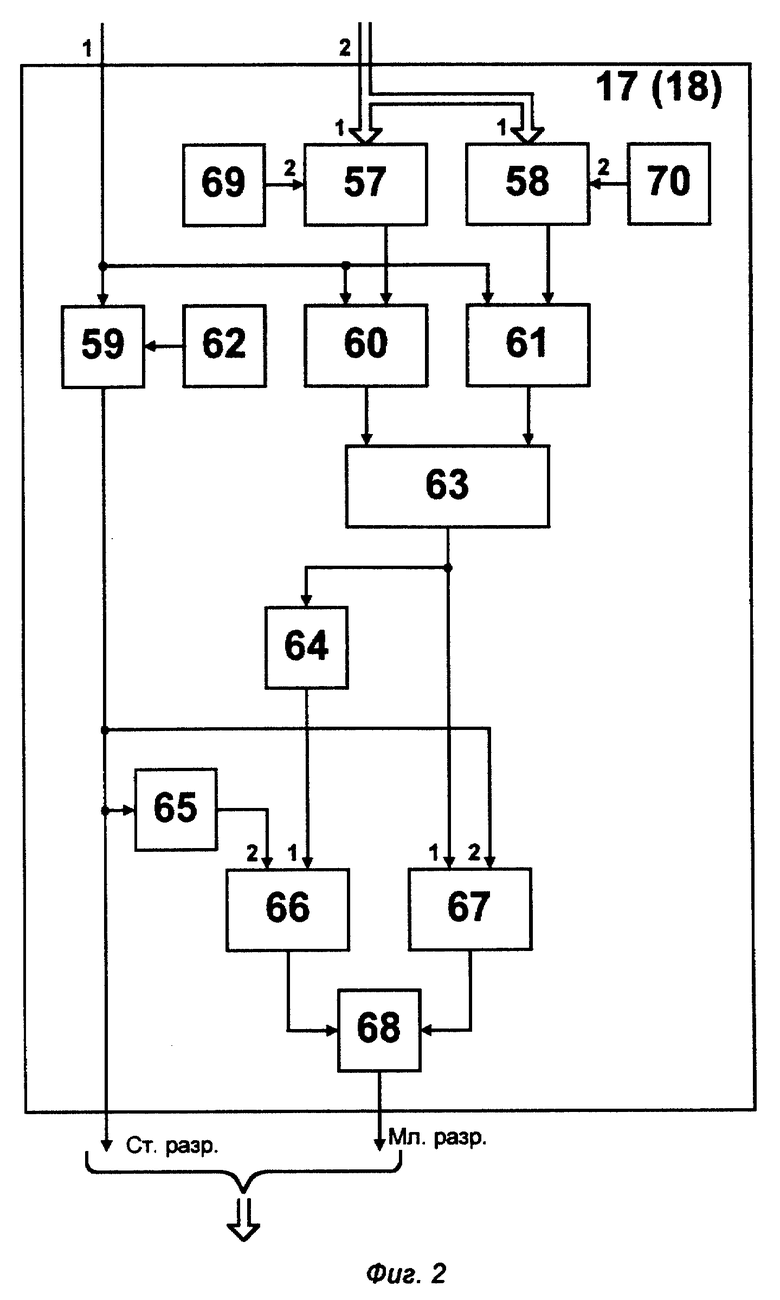
фиг. 2 - структурная схема блока компараторов;
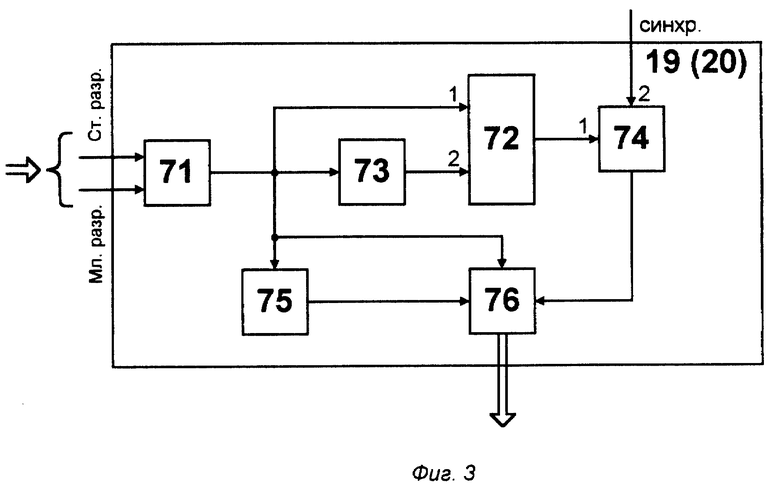
фиг. 3 - структурная схема автоматического регулятора порога;
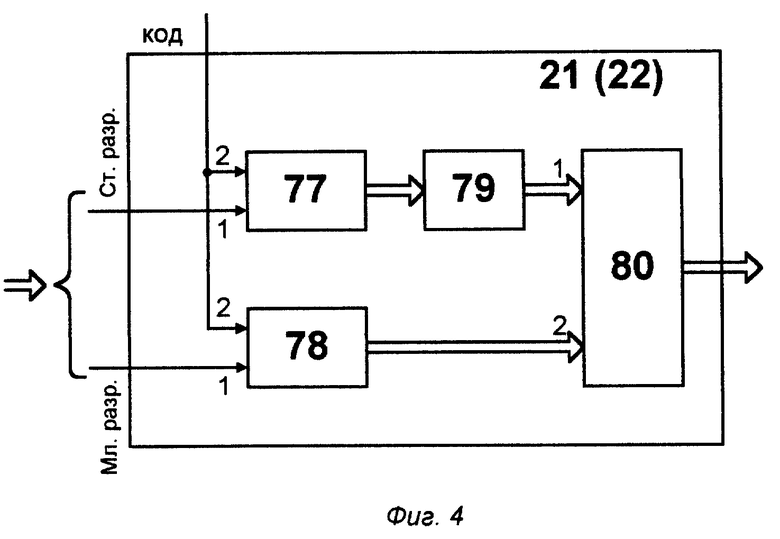
фиг. 4 - структурная схема многоразрядного согласованного фильтра;
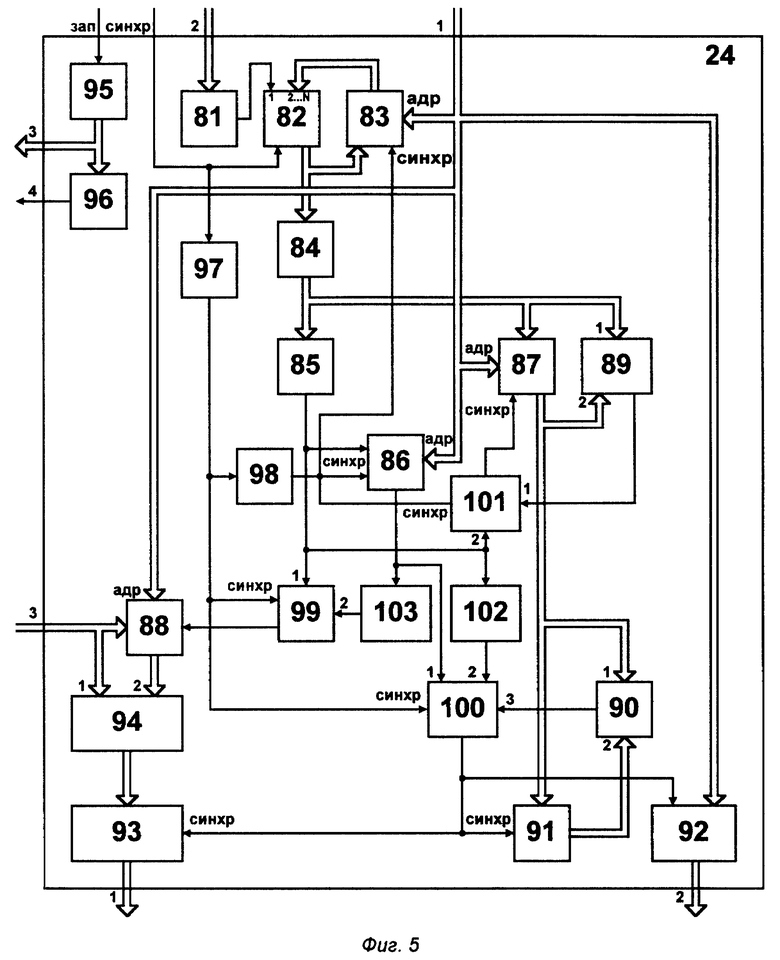
фиг. 5 - структурная схема блока обнаружения и выбора цели;
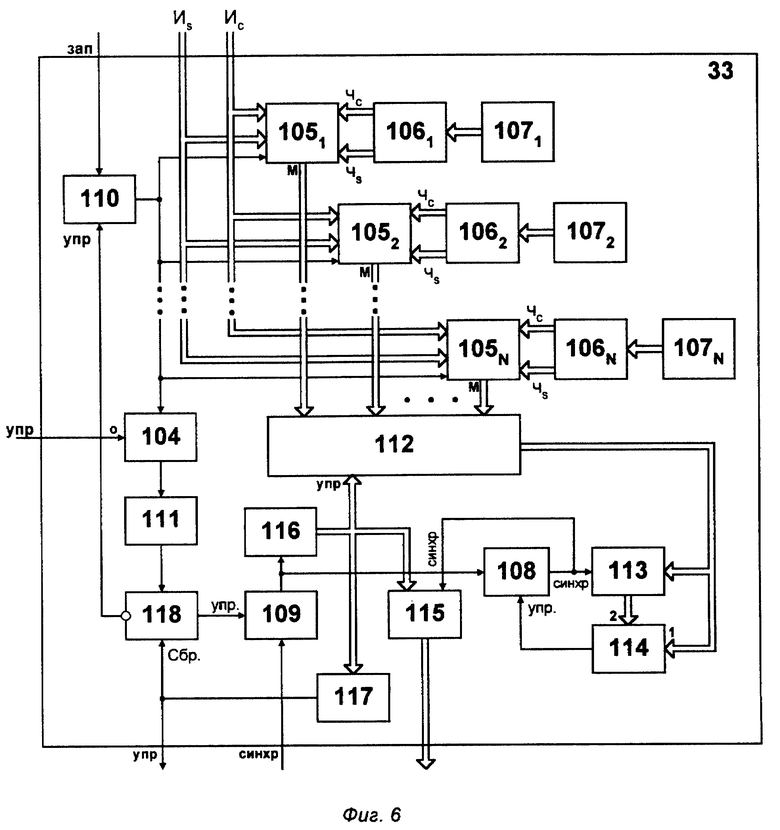
фиг. 6 - структурная схема блока захвата цели;
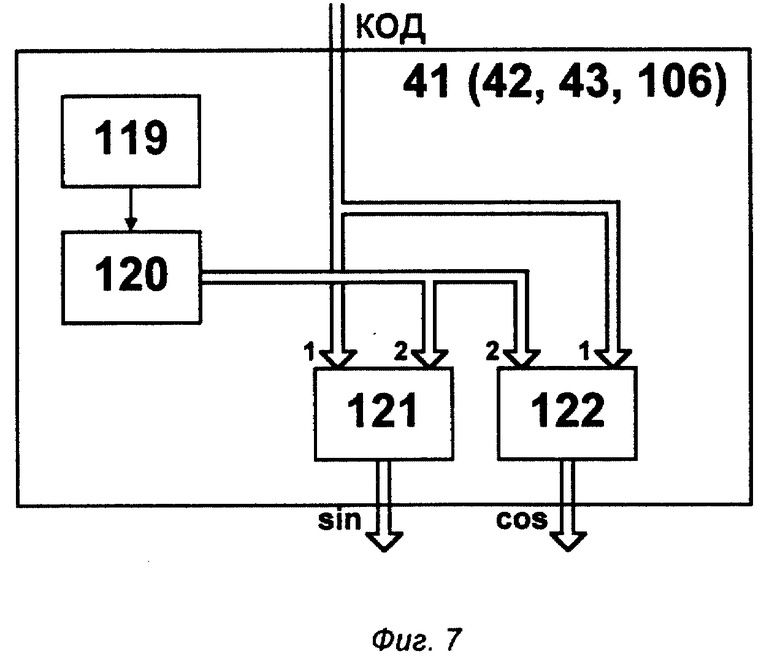
фиг. 7 - структурная схема генератора допплеровской частоты;
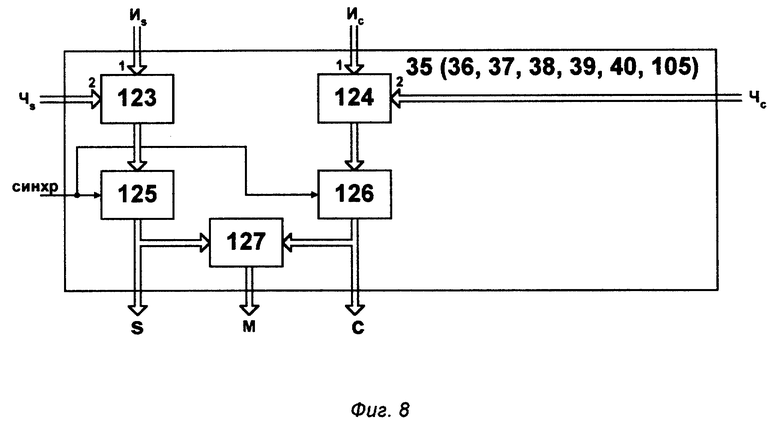
фиг. 8 - структурная схема фильтра допплеровской частоты.
На фиг. 1 структурной схемы моноимпульсной РЛС приняты следующие обозначения:
1 - возбудитель,
2 - фазовый манипулятор,
3 - усилитель мощности,
4 - антенный переключатель,
5 - антенна,
6 - синхронизатор,
7 - генератор кода,
8 - импульсный модулятор,
9 - суммарно-разностный преобразователь,
10 - усилитель высокой частоты,
11 - смеситель,
12 - усилитель промежуточной частоты,
13 - блок квадратурных фазовых детекторов суммарного сигнала,
14 - блок квадратурных фазовых детекторов разностного сигнала,
15 - амплитудный квантователь,
16 - цифровой согласованный фильтр,
17, 18 - первый и второй блоки компараторов соответственно,
19, 20 - первый и второй автоматические регуляторы порога (АРП) соответственно,
21, 22 - первый и второй многоразрядные согласованные фильтры (МСФ) соответственно,
23 - блок объединения квадратур,
24 - блок обнаружения и выбора цели (БОВЦ),
25 - коммутатор управляющих сигналов,
26 - привод антенны,
27 - датчик углового положения антенны,
28 - регистр угла,
29 - первый вычитатель,
30 - регистр дальности,
31 - первый сумматор,
32 - преобразователь кода во временной интервал,
33 - блок захвата цели (БЗХ),
34 - регистр,
35, 36, 37, 38, 39, 40 - первый, второй, третий, четвертый, пятый, шестой фильтры допплеровской частоты (ФДЧ) соответственно,
41, 42, 43 - первый, второй, третий генераторы допплеровской частоты (ГДЧ), соответственно,
44, 45, 46 - второй, третий, четвертый сумматор, соответственно,
47 - второй вычитатель,
48 - кодовая шина, выполненная в виде набора контактов (проводников), подключенных к источникам нулевого и единичного потенциалов,
49 - блок вентилей,
50 - дискриминатор сигнала дальности, выполненный в виде блока сравнения сигналов полустробов с контролем по сигналу центрального строба,
51 - частотный дискриминатор, выполненный в виде блока сравнения сигналов двух боковых частотных фильтров с контролем по сигналу центрального частотного фильтра,
52, 53 - первый и второй делители кода, соответственно,
54, 55 - первый и второй элемент задержки соответственно,
56 - счетчик дальности.
Согласно структурной схеме фиг. 1, в предлагаемой моноимпульсной РЛС последовательно соединены возбудитель 1, фазовый манипулятор 2 и усилитель мощности 3, второй вход которого подключен к выходу импульсного модулятора 8, а выход через антенный переключатель 4 подключен к антенне 5, которая кинематически связана с приводом 26 антенны, последовательно соединены соответствующими входами-выходами суммарного и разностного сигналов суммарно-разностный преобразователь 9, подключенный к третьему плечу антенного переключателя 4, усилитель 10 высокой частоты, смеситель 11 и усилитель 12 промежуточной частоты, к соответствующим выходам которого подключены блок 13 квадратурных фазовых детекторов суммарного сигнала и блок 14 квадратурных фазовых детекторов разностного сигнала. Синусный (на фиг. 1-S) и косинусный (на фиг. 1-С) выходы блока 14 через амплитудный квантователь 15 подключены к соответствующим информационным входам цифрового согласованного фильтра 16.
Входы импульсного модулятора 8 и генератора 7 кода подключены к выходу запускающих импульсов синхронизатора 6. Кодовые входы цифрового согласованного фильтра 16, фазового манипулятора 2, первого и второго МСФ 21 и 22 подключены к выходу генератора 7 кода. Выход гетеродинной частоты возбудителя 1 подключен к гетеродинному входу смесителя 11, а его выход промежуточной (опорной) частоты - к опорным входам блоков 13 и 14 квадратурных фазовых детекторов суммарного и разностного сигналов.
Датчик 27 углового положения антенны кинематически связан с приводом 26 антенны, управляющий вход которого подключен к выходу коммутатора 25 управляющих сигналов.
Обнуляющий вход счетчика 56 дальности объединен со входами запуска блока 24 обнаружения и выбора цели и преобразователя 32 кода во временной интервал и подключен к выходу запускающих импульсов синхронизатора 6, выход синхронизирующих импульсов которого подключен ко входам синхронизации первого и второго автоматических регуляторов 19, 20 порога, блока 24 обнаружения и выбора цели, блока 33 захвата цели и счетчика 56 дальности, выход которого подключен к первому входу блока 24 обнаружения и выбора цели.
Второй вход блока 24 обнаружения и выбора цели соединен с выходом блока 23 объединения квадратур, третий - с выходом датчика 27 углового положения антенны. Первый и второй выходы БОВЦ 24 подключены ко входам записи соответственно регистра 28 угла и регистра 30 дальности, третий выход подключен к первому входу коммутатора 25 управляющих сигналов, а четвертый выход - к управляющим входам коммутатора 25 управляющих сигналов, блока 33 захвата цели, регистра 30 дальности и регистра 28 угла, выход которого подключен к первому входу первого вычитателя 29, второй вход которого соединен с выходом блока 49 вентилей, а выход - со вторым входом коммутатора 25 управляющих сигналов.
Выход регистра 30 дальности подключен к первому входу первого сумматора 31, второй вход которого соединен с выходом дискриминатора 50 сигнала дальности, а выход - с информационным входом преобразователя 32 кода во временной интервал.
К выходу генератора 7 кода подключены кодовые входы первого и второго многоразрядных согласованных фильтров 21 и 22, входы которых, объединенные со входами соответственно первого и второго автоматических регуляторов 19, 20 порога, подключены к выходам соответственно первого и второго блоков 17 и 18 компараторов. Первые входы блоков 17 и 18 компараторов подключены соответственно к синусному и косинусному выходам (синусной и косинусной квадратурных составляющих суммарного видеосигнала) блока 13 квадратурных фазовых детекторов суммарного сигнала. Вторые входы компараторов 17 и 18 соединены с выходами соответственно первого и второго автоматических регуляторов 19 и 20 порога.
К выходам первого и второго многоразрядных согласованных фильтров 21 и 22 подключены соответственно синусные и косинусные (квадратурные) информационные входы (на фиг. 1 - Иs и Иc) блока 23 объединения квадратур, блока 33 захвата цели и фильтров 35, 36, 37, 38 и 39 допплеровской частоты. Синусный и косинусный выходы первого генератора 41 допплеровской частоты подключены к синусному и косинусному частотным входам (на фиг. 1 - Чs и Чс) четвертого фильтра 38 допплеровской частоты, синусный и косинусный выходы второго генератора 42 допплеровской частоты подключены к соответствующим частотным входам фильтра 39 допплеровской частоты, а синусный и косинусный выходы третьего генератора 43 допплеровской частоты - к соответствующим частотным входам фильтров 35, 36, 37 и 40 допплеровской частоты. Синусный и косинусный информационные входы фильтра 40 допплеровской частоты подключены к соответствующим выходам цифрового согласованного фильтра 16.
Выход преобразователя 32 кода во временной интервал подключен ко входу синхронизации фильтра 35 допплеровской частоты и входу первого элемента 54 задержки, выход которого подключен ко входам синхронизации фильтров 36, 38, 39, 40 допплеровской частоты, входу запуска блока 33 захвата цели и входу второго элемента 55 задержки. Выход элемента 55 задержки подключен ко входу синхронизации фильтра 37 допплеровской частоты.
Синусный и косинусный выходы фильтра 40 допплеровской частоты подключены к первым входам соответственно первого и второго делителей 52 и 53 кода, вторые входы которых подключены соответственно к синусному и косинусному выходам фильтра 36 допплеровской частоты. Модульный выход фильтра 36 допплеровской частоты подключен ко вторым входам (центрального строба сопровождения) дискриминатора 50 сигнала дальности и частотного дискриминатора 51. Первый и третий входы (полустробов сопровождения по дальности) дискриминатора 50 сигнала дальности подключены к модульным выходам соответственно фильтров 35 и 37 допплеровской частоты. Модульные выходы фильтров 38 и 39 допплеровской частоты подключены соответственно к первому и третьему входам (боковых частотных полустробов) частотного дискриминатора 51.
Выход частотного дискриминатора 51 подключен ко второму входу второго сумматора 44, первый вход которого соединен с выходом регистра 34, а выход подключен к кодовому входу генератора 43 допплеровской частоты и к первым входам второго вычитателя 47 и третьего сумматора 45, вторые входы которых подключены к кодовой шине 48. Выходы второго вычитателя 47 и третьего сумматора 45 подключены к кодовым входам первого и второго генераторов 41 и 42 допплеровской частоты соответственно. Выходы первого и второго делителей 52 и 53 кода подключены к соответствующим входам четвертого сумматора 46. Выход сумматора 46 подключен ко входу блока 49 вентилей, управляющий вход которого объединен со входом синхронизации регистра 34 и подключен к управляющему выходу блока 33 захвата цели, информационный выход которого подключен ко входу записи регистра 34.
Возбудитель 1, фазовый манипулятор 2, усилитель 3 мощности, импульсный модулятор 8, генератор 7 кода, образующие передающую часть РЛС, предназначены для формирования импульсного ФМ зондирующего сигнала и могут быть выполнены по известным схемам, приведенным в [5] .
Приемный тракт РЛС в составе суммарно-разностного преобразователя 9, усилителя 10 высокой частоты, смесителя 11, усилителя 12 промежуточной частоты и блоков 13, 14 квадратурных фазовых детекторов предназначен для суммарно-разностного преобразования принятого эхосигнала и его последовательной обработки в суммарном и разностном каналах. Примеры реализации соответствующих блоков приемного тракта известны и приведены, например, в [3] и [5] .
Цифровой согласованный фильтр 16 предназначен для согласованной фильтрации (сжатия) синусной и косинусной квадратурных составляющих бинарно квантованного разностного видеосигнала и может быть реализован аналогично цифровому согласованному фильтру прототипа по схеме, приведенной в описании [4, фиг. 2] .
Блоки 17 и 18 компараторов предназначены для формирования двухразрядного цифрового кода сжатого квадратурного сигнала суммарного канала, соответствующего текущему кванту дальности, и выполнены каждый согласно схеме, представленной на фиг. 2.
На фиг. 2 обозначено:
57, 58 - цифроаналоговые преобразователи (ЦАП),
59, 60, 61 - компараторы,
62 - нулевая шина (НШ),
63 - элемент равнозначности, 64, 65 - инверторы,
66, 67 - вентили,
68 - элемент ИЛИ,
69 - шина отрицательного порогового напряжения (ОШ), выполненная в виде проводника, подключенного к отрицательному полюсу источника питания,
70 - шина положительного порогового напряжения (ПШ), выполненная в виде проводника, подключенного к положительному полюсу источника питания.
Первые входы блоков 17 (18) компараторов образуют сигнальные входы компараторов 59, 60, 61, пороговые входы которых подключены соответственно к НШ 62, выходу ЦАП 57 и выходу ЦАП 58. Первые входы ЦАП 57 и 58 образуют второй вход блока 17 (18) компараторов. Второй вход ЦАП 57 подключен к ОШ 69, а второй вход ЦАП 58 - к ПШ 70. Выходы компараторов 60 и 61 подключены к соответствующим входам элемента 63 равнозначности, выход которого непосредственно подключен к первому входу вентиля 67 и через инвертор 64 - к первому входу вентиля 66. Выходы вентиля 66 и 67 подключены ко входам элемента ИЛИ 68, выход которого образует выход младшего разряда двухразрядного кода блока 17(18) компараторов, выход старшего разряда которого образует выход компаратора 59, к которому также непосредственно подключен второй вход вентиля 67 и через инвертор 65 второй вход вентиля 66.
Автоматические регуляторы 19 и 20 порога выполнены каждый в соответствии со схемой, представленной на фиг. 3, на которой обозначено:
71, 72 - элементы равнозначности,
73 - элемент задержки,
74 - вентиль,
75 - инвертор,
76 - интегратор.
Информационные входы АРП 19 (20) образуют входы младшего и старшего разрядов двухразрядного кода элемента 71 равнозначности, выход которого непосредственно соединен с первым входом элемента 72 равнозначности, через элемент 73 задержки - с его вторым входом, а также непосредственно соединен со входом младших разрядов интегратора 76, и через инвертор 75 - с его входом старших разрядов. Выход элемента 72 равнозначности подключен к первому входу вентиля 74, второй вход которого служит входом синхронизации АРП 19 (20). Выход вентиля 74 подключен к синхровходу интегратора 76, выход которого служит выходом АРП 19 (20).
Многоканальные согласованные фильтры 21 и 22 выполнены по схеме, представленной на фиг. 4, где обозначено:
77, 78 - элементарные квадратурные каналы (ЭКК), каждый из которых состоит из последовательно соединенных сдвигового регистра, оперативного запоминающего устройства кодов, многовходового сумматора и двухвходового сумматора,
79 - блок сдвига,
80 - сумматор.
Входы старшего и младшего разрядов двухразрядного кода, образующие вход МСФ 21 (22), подключены к первьм входам соответственно ЭКК 77 и ЭКК 78, вторые входы которых подключены к кодовому входу МСФ 21 (22). Выход ЭКК 77 через блок 79 сдвига подключен к первому входу сумматора 80, а выход ЭКК 78 непосредственно подключен к его второму входу. Выход сумматора 80 является выходом МСФ 21 (22).
Блок 23 объединения квадратур предназначен для объединения синусной и косинусной квадратурных составляющих информационного сигнала по правилу "сумма квадратов" и может быть выполнен аналогично блоку объединения квадратур прототипа [4, фиг. 4, стр. 37] .
Блок 24 обнаружения и выбора цели выполнен по схеме, представленной на фиг. 5.
На фиг. 5 приняты следующие обозначения:
81 - пороговый блок,
82 - сдвиговый регистр,
83 - оперативное запоминающее устройство (ОЗУ),
84 - сумматор единичных разрядов,
85 - пороговый блок,
86 - ОЗУ наличия цели,
87 - ОЗУ интенсивности цели,
88 - ОЗУ начального угла цели,
89, 90 - блоки сравнения,
91 - блок памяти интенсивности,
92 - блок памяти дальности,
93 - блок памяти угла,
94 - полусумматор,
95 - счетчик,
96 - дешифратор конечного кода,
97, 98 - элементы задержки,
99, 100, 101 - элементы И,
102,103 - инверторы.
К первому входу БОВЦ 24 подключены вход записи блока 92 памяти дальности и адресные входы ОЗУ 86 наличия цели, ОЗУ 87 интенсивности цели, ОЗУ 88 начального угла цели и ОЗУ 83. Выходы ОЗУ 83 поразрядно соединены со входами разрядов регистра 82 сдвига, начиная со второго, а вход первого разряда регистра 82 сдвига соединен с выходом порогового блока 81, вход которого образует второй вход БОВЦ 24.
К третьему входу БОВЦ 24 подключены первый вход полусумматора 94 и вход записи ОЗУ 88 начального угла цели, вход запуска БОВЦ 24 подключен ко входу счетчика 95, а вход синхронизации - ко входу элемента 97 задержки и входу синхронизации регистра 82 сдвига, выход которого соединен со входом записи ОЗУ 83 и входом сумматора 84 единичных разрядов.
Выход сумматора 84 соединен со входом порогового блока 85, первым входом блока 89 сравнения и входом записи ОЗУ 87 интенсивности цели, к выходу которого подключены второй вход блока 89 сравнения, первый вход блока 90 сравнения и вход записи блока 91 памяти интенсивности, выход которого подключен ко второму входу блока 90 сравнения.
Выход элемента 97 задержки подключен к входам синхронизации элементов И 99 и 100 и входу элемента 98 задержки, выход которого соединен со входами синхронизации ОЗУ 83, ОЗУ 86 и элемента И 101, выход которого подключен ко входу синхронизации ОЗУ 87. Первый вход элемента И 101 соединен с выходом блока 89 сравнения, а второй - с выходом порогового блока 85, который соединен также с входом записи ОЗУ 86, с первым входом элемента И 99 и через инвертор 102 - со вторым входом элемента И 100.
Выход ОЗУ 86 непосредственно соединен с первым входом элемента И 100 и через инвертор 103 - со вторым входом элемента И 99, выход которого подключен ко входу синхронизации ОЗУ 88, выход которого соединен со вторым входом полусумматора 94, подключенного ко входу записи блока 93 памяти угла, выход которого образует первый выход БОВЦ 24.
Третий вход элемента И 100 соединен с выходом блока 90 сравнения, а выход подключен ко входам синхронизации блока 91 памяти интенсивности, блока 93 памяти угла и блока 92 памяти дальности, выход которого образует второй выход БОВЦ 24.
Выход счетчика 95, образующий третий выход БОВЦ 24, подключен также к дешифратору 96 конечного кода, выход которого является четвертым выходом (по сигналу конца обзора) БОВЦ 24.
Блок 33 захвата цели выполнен согласно схеме, приведенной на фиг. 6, на которой обозначено:
104 - счетчик,
1051, . . . , 105N - ФДЧ блока захвата цели с первого по N-й соответственно,
1061, . . . , 106N - ГДЧ блока захвата цели с первого по N-й соответственно,
1071, . . . , 107N - кодовые шины частоты (ШЧ) блока захвата цели с первой по N-ю, соответственно, выполненные в виде набора контактов (проводников), подключенных к источникам нулевого и единичного потенциала,
108, 109, 110 - вентили,
111 - дешифратор конечного кода,
112 - коммутатор,
113 - регистр,
114 - блок сравнения,
115 - регистр частоты,
116 - счетчик,
117 - дешифратор конечного кода,
118 - триггер.
Синусный и косинусный информационные входы БЗХ 33 подключены соответственно к синусным и косинусным информационным входам (Иs, Ис) ФДЧ 1051, . . . , 105N, частотные входы Чs и Чс которых подключены соответственно к синусным и косинусным выходам ГДЧ 1061, . . . , 106N, кодовые входы которых подключены к ШЧ 1071, . . . , 107N. Входы синхронизации ФДЧ 1051, . . . , 105N объединены со счетным входом счетчика 104 и подключены к выходу вентиля 110, управляющий вход которого подключен к инверсному выходу триггера 118, а сигнальный вход вентиля 110 образует вход запуска БЗХ 33. Управляющий вход БЗХ 33 подключен к обнуляющему входу счетчика 104, а вход синхронизации - к сигнальному входу вентиля 109.
Выход счетчика 104 соединен с входом дешифратора 111 конечного кода, выход которого подключен к сигнальному входу триггера 118, вход сброса которого подключен к выходу дешифратора 117 конечного кода, который служит и управляющим выходом БЗХ 33.
Прямой выход триггера 118 подключен к управляющему входу вентиля 109, выход которого подключен к счетному входу счетчика 116 и через вентиль 108 ко входам синхронизации регистра 113 и регистра 115 частоты, выход которого образует информационный выход БЗХ 33. Выход счетчика 116 подключен ко входу дешифратора 117 конечного кода, входу записи регистра 115 частоты и управляющему входу коммутатора 112, входы которого с первого по N-й подключены к модульным выходам соответственно ФДЧ 1051, . . . , 105N, а выход коммутатора 112 подключен ко входу записи регистра 113 и первому входу блока 114 сравнения, второй вход которого подключен к выходу регистра 113, а выход - к управляющему входу вентиля 108.
Генераторы 41, 42, 43, 1061, . . . , 106N допплеровских частот выполнены в соответствии со схемой, представленной на фиг. 7, на которой обозначено:
119 - задающий генератор,
120 - счетчик,
121 - постоянное запоминающее устройство (ПЗУ) синусов,
122 - ПЗУ косинусов.
Кодовый вход ГДЧ 41 (42, 43, 1061, . . . , 106N) подключен к первым входам ПЗУ 121 синусов и ПЗУ 122 косинусов, выходы которых образуют соответственно синусный и косинусный выходы ГДЧ, а вторые входы подключены к выходу счетчика 120, вход которого подключен к выходу задающего генератора 119.
Фильтры 35, 36, 37, 38, 39, 40, 1051, . . . , 105N допплеровских частот выполнены в соответствии со схемой, представленной на фиг. 8, на которой обозначено:
123, 124 - умножители,
125, 126 - интеграторы скользящего интервала,
127 - блок объединения квадратур.
Синусный и косинусный частотные входы (Чs и Чс) ФДЧ подключены ко второму входу умножителя 123 и второму входу умножителя 124 соответственно, первые входы которых образуют синусный и косинусный информационные входы (Иs и Ис) ФДЧ. Выходы умножителей 123 и 124 подключены ко входам интеграторов 125 и 126 скользящего интервала соответственно, выходы которых образуют синусный и косинусный (квадратурные) выходы ФДЧ. Выходы интеграторов 125 и 126 подключены также ко входам блока 127 объединения квадратур, образующего модульный (М) выход ФДЧ. Вход синхронизации ФДЧ подключен ко входам синхронизации интеграторов 125 и 126 скользящего интервала.
Устройство работает следующим образом.
Возбудитель 1 формирует сигнал несущей частоты, поступающий на фазовый манипулятор 2, сигнал гетеродинной частоты, поступающий на смеситель 11, и опорный сигнал промежуточной частоты, поступающий на опорные входы блоков 13 и 14 квадратурных фазовых детекторов.
Синхронизатор 6 формирует запускающие импульсы с частотой зондирования и синхронизирующие импульсы с частотой квантования принимаемого сигнала. Запускающий импульс поступает на вход генератора 7 кода и на вход импульсного модулятора 8. При этом генератор 7 кода формирует псевдослучайный двоичный код, поступающий на фазовый манипулятор 2, который изменяет фазу несущей частоты возбудителя 1 в соответствии с поступающим кодом. Полученный при этом фазоманипулированный сигнал поступает на вход усилителя 3 мощности, на второй вход которого поступает отпирающий импульс с импульсного модулятора 8. Выходной фазоманипулированный импульс усилителя 3 мощности через антенный переключатель 4 поступает в антенну 5 и излучается в пространство.
Принимаемый антенной 5 сигнал через антенный переключатель 4 поступает на суммарно-разностный преобразователь 9, на выходах которого при этом формируются суммарный и разностный сигналы, поступающие на соответствующие входы усилителя 10 высокой частоты, с выхода которого усиленные суммарный и разностный сигналы поступают на смеситель 11, где они смешиваются с сигналом гетеродинной частоты возбудителя 1. При этом на выходе смесителя 11 формируются суммарный и разностный сигналы промежуточной частоты, поступающие на усилитель 12 промежуточной частоты, а с его выходов суммарный и разностный сигналы поступают на блоки 13 и 14 квадратурных фазовых детекторов суммарного и разностного сигналов соответственно. На опорные входы блоков 13 и 14 поступает опорный сигнал возбудителя 1, который в каждом блоке смешивается с сигналом усилителя промежуточной частоты (УПЧ) непосредственно и со сдвигом фазы на 90o, в результате чего на выходе каждого блока 13 (14) образуется по два квадратурных сигнала (синусный и косинусный) на видеочастоте. Указанные квадратурные составляющие разностного видеосигнала с блока 14 квадратурных фазовых детекторов поступают на амплитудный квантователь 15, который выполняет их бинарное квантование с нулевым порогом. Бинарно квантованные сигналы с выхода амплитудного квантователя 15 поступают на квадратурные информационные входы цифрового согласованного фильтра 16, на кодовый вход которого в каждом интервале зондирования поступает и запоминается код фазовой манипуляции с генератора 7 кода.
В цифровом согласованном фильтре 16 производится сжатие принимаемого сигнала путем вычисления корреляционной функции между принимаемым сигналом и кодом фазовой манипуляции зондирующего сигнала. При этом на двух квадратурных выходах фильтра 16 в каждый текущий момент времени формируются два сжатых квадратурных сигнала (синусный и косинусный), соответствующие текущему кванту дальности.
Синусная и косинусная квадратурные составляющие суммарного видеосигнала с выхода блока 13 квадратурных фазовых детекторов суммарного сигнала поступают соответственно на вход блока 17 компараторов и на вход блока 18 компараторов, которые формируют двухразрядные коды, поступающие на многоразрядные согласованные фильтры 21 и 22 соответственно.
При этом в каждом из блоков 17 (18) компараторов (см. фиг. 2) входной сигнал с блока 13 квадратурных фазовых детекторов поступает на компараторы 59, 60 и 61, где сравнивается с пороговыми сигналами, поступающими на компаратор 59 от шины 62, формирующей нулевой сигнал, а на компараторы 60 и 61 - соответственно от ЦАП 57 и ЦАП 58, формирующих симметричные относительно нуля отрицательный и положительный пороги, для чего на их первые входы подается цифровой код от автоматического регулятора 19 (20), а на вторые входы подается соответственно отрицательное и положительное напряжения питания от шины 69 отрицательного порогового напряжения и шины 70 положительного порогового напряжения, равные по величине и противоположные по знаку.
Бинарные сигналы с выходов компараторов 60 и 61 поступают на элемент 63 равнозначности, выходной сигнал которого поступает на вентиль 67 и через инвертор 64 - на вентиль 66, на вторые входы которых соответственно поступает выходной сигнал компаратора 59 непосредственно и через инвертор 65. Выходные сигналы вентилей 66 и 67 поступают на элемент ИЛИ 68, выходной сигнал которого образует младший разряд выходного двухразрядного кода блока 17 (18) компараторов, а выход компаратора 59 образует старший разряд указанного двухразрядного кода.
Путем анализа различных сочетаний сигнала от блока 13 фазовых детекторов и пороговых сигналов, подаваемых на компараторы 59, 60, 61, можно убедиться, что выходной сигнал блока 17(18) компараторов последовательно принимает значения от 0 до 3 в двоичном коде при следующих значениях сигнала блока 13 фазовых детекторов:
ниже отрицательного порога -. . . 0
выше отрицательного порога, но ниже нулевого -. . . 1
выше нулевого порога, но ниже положительного -. . . 2
выше положительного порога -. . . 3.
Полученный двоичный код с выхода блока 17 компараторов поступает на входы многоразрядного согласованного фильтра 21 и автоматического регулятора 19 порога, а с выхода блока 18 компараторов - на входы многоразрядного согласованного фильтра 22 и автоматического регулятора 20 порога.
В автоматическом регуляторе порога 19 (20) (см. фиг. 3) сигнал с выхода блока 17 (18) компараторов поступает на входы элемента 71 равнозначности, выходной сигнал которого поступает на элемент 73 задержки, где задерживается на время одного дискрета фазовой манипуляции зондирующего сигнала. Текущее значение сигнала элемента 71 равнозначности и задержанное (с выхода элемента 73) поступают на входы элемента 72 равнозначности. При этом выходной сигнал элемента 71 равнозначности принимает нулевое значение в том случае, когда входной сигнал блока 17 (18) компараторов лежит между верхним и нижним пороговыми напряжениями, и принимает единичное значение в противоположном случае, а выходной сигнал элемента 72 равнозначности принимает единичное значение в том случае, когда входной сигнал блока 17 (18) компараторов несколько раз подряд в соседних дискретах времени принимает значения внутри указанного порогового диапазона или несколько раз подряд принимает значения вне порогового диапазона. В этих случаях выходной сигнал элемента 72 равнозначности открывает вентиль 74 и пропускает синхроимпульсы от синхронизатора 6, поступающие через вход синхронизации автоматического регулятора 19 (20) порога, на вход интегратора 76, изменяя его выходное значение на величину элементарного приращения.
Величина элементарного приращения интегратора 76 формируется выходным сигналом элемента 71 равнозначности, который поступает на младшие разряды входа интегратора 76 и через инвертор 75 - на старшие разряды входа интегратора 76, включая знаковый разряд.
При этом выходной код интегратора 76 изменяется таким образом, что выходной сигнал блока 13 квадратурных фазовых детекторов с равной вероятностью попадает внутрь порогового диапазона блоков 17 и 18 компараторов и вне его.
Выходные сигналы блоков 17 и 18 компараторов поступают также на МСФ 21 и 22 соответственно (см. фиг. 4), на кодовые входы которых (вторые входы ЭКК 77 и ЭКК 78) подается псевдослучайный код зондирующего сигнала от генератора 7 кода. В МСФ 21 (22) старший разряд входного сигнала поступает на элементарный квадратурный канал 77, а младший - на элементарный квадратурный канал 78, которые аналогичны квадратурным каналам цифрового согласованного фильтра 16. Выходной сигнал ЭКК 77 через блок 79 сдвига, удваивающий выходной сигнал, поступает на первый вход сумматора 80, а выходной сигнал ЭКК 78 - на его второй вход. При этом на выходе сумматора 80, являющемся выходом МСФ 21 (22), формируется сжатый сигнал соответствующей квадратурной составляющей суммарного видеосигнала с выхода блока 13 квадратурных фазовых детекторов.
Выходные сигналы многоразрядных согласованных фильтров 21 и 22 поступают на блок 23 объединения квадратур, в котором происходит объединение квадратур по правилу "сумма квадратов", в результате чего выходной сигнал блока 23 объединения квадратур не зависит от начальной фазы принимаемого эхосигнала.
Выходной сигнал блока 23 объединения квадратур поступает через первый вход блока 24 обнаружения и выбора цели на пороговый блок 81 (см. фиг. 5). В пороговом блоке 81 приходящий сигнал сравнивается с установленным в нем пороговым сигналом, в результате чего на выходе блока 81 формируется бинарный сигнал, поступающий на вход сдвигового регистра 82. На синхронизирующий вход БОВЦ 24 поступает синхросигнал от синхронизатора 6, который в блоке 24 поступает на синхровход сдвигового регистра 82 и на элемент 97 задержки. При этом в первый разряд сдвигового регистра 82 записывается сигнал с выхода порогового блока 81, а в остальные разряды, начиная со второго, записывается со сдвигом сигнал, поступающий с выхода ОЗУ 83 из ячейки, адрес которой определяется сигналом текущей дальности, поступающим на первый вход БОВЦ 24 из счетчика 56 дальности.
На обнуляющий вход счетчика 56 дальности поступает и обнуляет счетчик 56 в начале каждого интервала зондирования запускающий импульс с синхронизатора 6, а на синхровход счетчика 56 поступает синхронизирующий импульс с выхода синхронизатора 6, обеспечивая формирование в счетчике 56 кода текущего элемента дальности.
Указанный код текущего элемента дальности поступает также на адресные входы ОЗУ 86 наличия цели, ОЗУ 87 интенсивности цели, ОЗУ 88 начального угла цели и на вход записи блока 92 памяти дальности. Сигнал с выхода сдвигового регистра 82 поступает на вход ОЗУ 83 и записывается в него синхроимпульсом с синхронизатора 6, прошедшим через элементы 97 и 98 задержки.
Таким образом, после определенного количества интервалов зондирования в ячейках ОЗУ 83 формируется пачка единичных сигналов, соответствующая пачке отраженных импульсов от цели, или шумовая совокупность случайных единичных сигналов на фоне большого количества нулевых разрядов.
Сигнал с выхода сдвигового регистра 82 поступает также на вход сумматора 84 единичных разрядов, на выходе которого при этом формируется код, равный количеству единичных разрядов в выходном сигнале регистра 82 сдвига. Выходной сигнал сумматора 84 поступает на пороговый блок 85, где сравнивается с заданным порогом обнаружения цели по логике К из N, где К - число единичных разрядов в регистре 82, а N - общее число разрядов в нем.
В случае превышения указанного порога, что соответствует обнаружению цели в текущем элементе дальности, единичный выходной сигнал порогового блока 85 поступает на элемент И 99, на второй вход которого поступает сигнал из ОЗУ 86 наличия цели через инвертор 103. Если в предыдущем интервале зондирования в текущую ячейку ОЗУ 86 был записан нулевой сигнал, свидетельствовавший об отсутствии обнаружения, то единичный выходной сигнал инвертора 103 совпадает с единичным выходным сигналом порогового блока 85, что свидетельствует о начале пачки отраженных от цели импульсов. В этом случае через элемент И 99 проходит синхроимпульс с выхода элемента 97 задержки, который поступает на вход синхронизации ОЗУ 88 и записывает в его ячейку, соответствующую текущему элементу дальности, код угла начала пачки импульсов от цели, поступающий на него от датчика 27 углового положения антенны через третий вход БОВЦ 24.
Выходной сигнал сумматора 84 единичных разрядов, характеризующий интенсивность цели в текущем элементе дальности, поступает также на вход ОЗУ 87 интенсивности цели и на блок 89 сравнения, на второй вход которого поступает из ОЗУ 87 сигнал интенсивности цели для текущего элемента дальности, записанный в него в предыдущем интервале зондирования. Если сигнал сумматора 84 превышает сигнал ОЗУ 87, то на выходе блока 89 сравнения формируется единичный сигнал, который поступает на элемент И 101, на второй вход которого поступает выходной сигнал порогового блока 85. В случае, если этот сигнал единичный, что свидетельствует об обнаружении цели, то через элемент И 101 проходит синхроимпульс с выхода элемента 98 задержки и записывает интенсивность цели в ОЗУ 87 интенсивности цели.
В результате многократного повторения изложенных операций в ОЗУ 87 заносится максимальная интенсивность целей для каждого элемента дальности. В случае, когда в текущем зондировании с порогового блока 85 поступает нулевой сигнал, свидетельствующий об отсутствии обнаружения, а из ОЗУ 86 наличия цели - единичный сигнал, свидетельствующий о наличии обнаружения в предыдущем интервале зондирования, то такое сочетание сигналов свидетельствует о конце пачки в текущем элементе дальности. При этом на элемент И 100 поступают два единичных сигнала от ОЗУ 86 и от блока 85 через инвертор 102.
В это время из ОЗУ 87 сигнал максимальной интенсивности цели для текущего элемента дальности поступает на блок 91 памяти интенсивности и на блок 90 сравнения. На второй вход блока 90 сравнения поступает сигнал из блока 91 памяти интенсивности, записанный в него в предыдущем интервале зондирования. На выходе блока 90 сравнения формируется единичный сигнал в том случае, если текущий сигнал интенсивности из ОЗУ 87 превышает сигнал интенсивности, записанный в блок 91 памяти ранее. Единичный сигнал с выхода блока 90 сравнения поступает на третий вход элемента И 100, открывая его для прохождения синхроимпульса с выхода элемента 97 задержки.
Таким образом, на выходе элемента И 100 формируется импульс в момент окончания пачки отраженных импульсов от цели, интенсивность которой превышает интенсивность целей, обнаруженных ранее.
Импульс с выхода элемента И 100 поступает на синхровход блока 91 памяти интенсивности и записывает в него сигнал текущей интенсивности. В результате многократного повторения изложенных операций в блок 91 памяти интенсивности записывается максимальная интенсивность цели, обнаруженной РЛС.
Импульс с выхода элемента И 100 поступает также на синхровход блока 92 памяти дальности и записывает в него сигнал дальности обнаруженной цели с максимальной интенсивностью.
Текущее значение угла поворота антенны с датчика 27 углового положения антенны через третий вход БОВЦ 24 поступает также на полусумматор 94, на второй вход которого поступает код угла начала пачки импульсов от цели для текущего элемента дальности из ОЗУ 88. На выходе полусумматора 94 при этом формируется сигнал полусуммы угловых положений антенны, соответствующих началу пачки отраженных импульсов и текущему моменту времени.
В момент формирования импульса на выходе элемента И 100 (конец пачки импульсов от цели) сигнал на выходе полусумматора 94 равен полусумме координат начала и конца пачки отраженных от цели импульсов, что соответствует угловым координатам цели. Этот сигнал поступает на блок 93 памяти угла и записывается в него выходным импульсом элемента И 100.
Таким образом, после многократного выполнения изложенных операций в блоки 92 и 93 памяти дальности и угла записываются координаты цели, обнаруженной РЛС и имеющей максимальную интенсивность.
Импульсы запуска синхронизатора 6 через вход запуска блока 24 обнаружения и выбора цели проходят на счетчик 95, формирующий сигнал управления приводом антенны, который с третьего выхода БОВЦ 24 поступает на коммутатор 25 управляющих сигналов и проходит на его выход. С выхода коммутатора 25 управляющий сигнал поступает на привод 26 антенны, который через кинематическую связь поворачивает антенну 5 на угол, пропорциональный поступающему коду. Привод 26 антенны связан второй кинематической связью с датчиком 27 углового положения антенны, на выходе которого при повороте антенны формируется код текущего углового положения антенны, поступающий на третий вход БОВЦ 24.
Одновременно сигнал с выхода счетчика 95 поступает на дешифратор 96 конечного кода. При достижении на счетчике 95 соответствующего кода дешифратор 96 срабатывает и формирует управляющий сигнал конца обзора пространства, поступающий на четвертый выход БОВЦ 24.
Таким образом, за время обзора пространства на выходах угла и дальности (первый и второй выходы) БОВЦ 24 фиксируются координаты угла и дальности наибольшей из обнаруженных целей. Эти координаты импульсом конца обзора с четвертого выхода БОВЦ 24 записываются соответственно в регистр 28 угла и регистр 30 дальности. Одновременно управляющий импульс конца обзора поступает на коммутатор 25 управляющих сигналов, переключая его в положение пропускания сигнала со своего второго входа, подключенного к выходу вычитателя 29.
Импульс конца обзора поступает также на управляющий вход блока 33 захвата цели, в котором проходит на обнуляющий вход счетчика 104 (см. фиг. 6). Сигнал регистра 30 дальности подается на сумматор 31, на второй вход которого поступает сигнал дискриминатора 50 сигнала дальности, который перед началом работы имеет нулевой выходной сигнал. При этом на выходе сумматора 31 формируется сигнал, равный коду дальности максимальной обнаруженной цели, который поступает на преобразователь 32 кода во временной интервал, на вход запуска которого от синхронизатора 6 поступает запускающий импульс в каждом зондировании. Преобразователь 32 формирует на своем выходе импульсы, задержанные относительно зондирующего импульса РЛС на интервал времени, который в сумме с задержкой на элементе 54 задержки соответствует дальности до максимальной обнаруженной цели.
Выходной импульс преобразователя 32 через элемент 54 задержки поступает на вход запуска блока 33 захвата цели, в котором через открытый вентиль 110 поступает на синхровход счетчика 104 и на входы синхронизации фильтров 1051, . . . . 105N допплеровской частоты, в которых он поступает на синхровходы интеграторов 125 и 126 скользящего интервала (см. фиг. 8). Сжатые квадратурные сигналы с выходов многоразрядных согласованных фильтров 21 и 22 поступают соответственно на синусный и косинусный информационные входы блока 33 захвата цели, в котором они поступают на одноименные входы ФДЧ 1051, . . . , 105N. В ФДЧ 1051, . . . , 105N указанные сигналы поступают на первые входы соответственно умножителя 123 и умножителя 124. На частотные входы фильтров 1051, . . . . 105N поступают синусный и косинусный сигналы с выходов генераторов 1061, . . . . 106N допплеровских частот, настроенных каждый на свою частоту от шин 1071, . . . , 107N с установленными на них кодами соответствующих частот, сдвинутыми на величину дискрета допплеровской частоты ΔfД, обратно пропорционального интервалу ТЗХ в режиме захвата (ΔfД = 1/TЗХ).
В генераторах 1061, . . . . 106N допплеровской частоты (см. фиг. 7) кодовый сигнал от шин 1071, . . . , 107N поступает на первые входы ПЗУ 121 синусов и ПЗУ 122 косинусов, на вторые входы которых подается сигнал счетчика 120, на синхровход которого поступает сигнал от задающего генератора 119. При этом на выходах ПЗУ 121 и 122, образующих выходы генераторов 1061, . . . , 106N допплеровской частоты, формируются синусный и косинусный сигналы соответствующей частоты, которые подаются в ФДЧ 1051, . . . , 105N на вторые входы умножителей 123 и 124 соответственно. Выходные сигналы умножителей 123 и 124 поступают на входы интеграторов 125 и 126 скользящего интервала, равного интервалу захвата ТЗХ.
Выходные сигналы интеграторов 125 и 126 скользящего интервала поступают на квадратурные (синусный и косинусный) выходы фильтра допплеровской частоты и на входы блока 127 объединения квадратур, на выходе которого формируется сигнал модульного значения соответствующей допплеровской составляющей сигнала цели, поступающий на модульный выход фильтра допплеровской частоты.
Интегрирование сигналов в интеграторах 125 и 126 скользящего интервала ФДЧ 1051, . . . , 105N происходит до тех пор, пока на их синхровходы поступают синхронизирующие импульсы от вентиля 110. Указанные импульсы поступают также на счетчик 104, увеличивая его содержимое. Выходной сигнал счетчика 104 поступает на дешифратор 111 конечного кода, который срабатывает при достижении установленного кода, равного числу интервалов зондирования, необходимому для захвата цели на сопровождение. Выходной сигнал дешифратора 111 устанавливает триггер 118 в единичное состояние, при котором триггер 118 своим инверсным выходным сигналом запирает вентиль 110, а прямым выходным сигналом открывает вентиль 109.
При этом интегрирование сигналов в ФДЧ 1051, . . . , 105N заканчивается. Сигналы с модульных выходов ФДЧ 1051, . . . , 105N поступают на соответствующие входы коммутатора 112, на управляющий вход которого подается сигнал от счетчика 116.
Синхроимпульсы синхронизатора 6 поступают на вход синхронизации блока 33 захвата цели и через открытый вентиль 109 поступают на вход счетчика 116. Двоичный код с выхода счетчика 116, поступая на управляющий вход коммутатора 112, обеспечивает передачу на его выход поочередно всех выходных сигналов ФДЧ 1051, . . . , 105N. Одновременно выходной сигнал счетчика 116, являющийся кодом номера текущего допплеровского канала, модульный сигнал которого сформирован на выходе коммутатора 112, поступает на регистр 115 частоты и на дешифратор 117 конечного кода.
Выходной сигнал коммутатора 112 поступает на вход регистра 113 и на первый вход блока 114 сравнения, на второй вход которого подается сигнал с выхода регистра 113, записанный в него ранее. Если текущий сигнал допплеровского канала, поступающий с коммутатора 112, превышает записанный ранее в регистр 113, то на выходе блока 114 сравнения формируется единичный сигнал, открывающий вентиль 108.
При этом синхросигнал с выхода вентиля 109 через открытый вентиль 108 поступает на синхровходы регистров 113 и 115. В регистр 113 он записывает выходной сигнал текущего допплеровского канала, а в регистр 115 записывает номер текущего допплеровского канала. Таким образом, в регистр 113 записывается максимальный из сигналов допплеровских каналов, а в регистр 115 - его номер.
После опроса всех сигналов коммутатора 112 срабатывает дешифратор 117 конечного кода, выходной сигнал которого сбрасывает триггер 118. При этом запирается вентиль 109, и содержимое регистра 115 больше не изменяется. В нем хранится код допплеровской частоты, соответствующий максимальному сигналу.
Сигнал с выхода регистра 115 поступает через информационный выход блока 33 захвата цели на вход записи регистра 34, в который записывается сигналом дешифратора 117, поступающего с управляющего выхода блока 33 захвата цели на синхровход регистра 34. Одновременно этот управляющий сигнал конца захвата цели поступает на блок 49 вентилей, открывая его.
Далее начинается сопровождение выбранной цели.
При этом код допплеровской частоты с выхода регистра 34 поступает на первый вход сумматора 44, на второй вход которого поступает сигнал с частотного дискриминатора 51, обнуленного в начале сопровождения цели. Выходной сигнал сумматора 44 поступает на кодовый вход генератора 43 допплеровской частоты, на выходах которого при этом формируются синусная и косинусная составляющие заданной частоты, которые поступают на соответствующие частотные входы фильтров 35, 36 и 37 допплеровской частоты. На информационные входы фильтров 35, 36 и 37 подаются соответственно синусные и косинусные сжатые сигналы с выходов многоразрядных согласованных фильтров 21 и 22, а на их входы синхронизации - синхронизирующие импульсы соответственно от преобразователя 32 кода во временной интервал, от элемента 54 задержки и от элемента 55 задержки. Величина задержки элементов 54 и 55 равна половине интервала дискретизации фазы в зондирующем импульсе. При этом так же, как и в режиме захвата, синхросигнал с выхода элемента 54 задержки соответствует дальности захваченной и сопровождаемой цели и является сигналом центрального строба сопровождения, а сигналы с выхода преобразователя 32 кода во временной интервал и выхода элемента 55 задержки соответствуют моментам упреждения и запаздывания на половину интервала дискрета кода ФМ относительно установленной дальности до цели и являются сигналами соответствующих полустробов сопровождения по дальности.
Модульные сигналы фильтров 35, 36 и 37 допплеровской частоты поступают на дискриминатор 50 сигнала дальности, в котором по величине выходных модульных сигналов ФДЧ 35, 36 и 37 формируется оценка отклонения синхросигнала с выхода элемента 54 задержки от истинной дальности до цели. Указанный сигнал отклонения с выхода дискриминатора 50 сигнала дальности подается на второй вход сумматора 31, который своим выходным сигналом изменяет задержку импульсов, формируемых преобразователем 32 кода во временной интервал, относительно запускающих импульсов синхронизатора 6.
Таким образом, реализуется сопровождение цели с использованием центрального строба сопровождения в ФДЧ 36 и двух полустробов сопровождения в ФДЧ 35 и 37, при этом ФДЧ 35, 36 и 37 являются узкополосными фильтрами допплеровской частоты.
Сигнал с выхода сумматора 44 поступает также на первые входы сумматора 45 и вычитателя 47, на вторые входы которых подается сигнал с кодовой шины 48, на которой установлен код половины дискрета допплеровской частоты ΔfД в блоке 33 захвата цели. Выходные сигналы вычитателя 47 и сумматора 45 подаются соответственно на ГДЧ 41 и 42, которые генерируют сигналы допплеровской частоты, сдвинутые относительно частоты генератора 43 в разные стороны на половину дискрета допплеровской частоты ΔfД.
Синусные и косинусные выходные сигналы ГДЧ 41 и 42 поступают на соответствующие частотные входы ФДЧ 38 и 39 соответственно. На синхровходы ФДЧ 38 и 39 подается синхроимпульс с элемента 54 задержки, соответствующий центральному стробу сопровождения по дальности. На синусный и косинусный информационные входы ФДЧ 38 и 39 поступают сигналы с выходов МСФ 21 и 22. При этом на модульных выходах ФДЧ 38 и 39 формируются на скользящем интервале сигналы частотных полустробов сопровождения сигнала по допплеровской частоте, сдвинутых относительно центральной частоты сопровождения в ФДЧ 36.
Выходные модульные сигналы ФДЧ 36, 38 и 39 поступают на соответствующие входы частотного дискриминатора 51, на выходе которого при этом в зависимости от соотношения выходных сигналов центрального строба с ФДЧ 36 и двух боковых частотных полустробов сопровождения с ФДЧ 38 и ФДЧ 39 формируется величина частотного рассогласования, которая с выхода дискриминатора 51 поступает на второй вход сумматора 44, сдвигая на соответствующую величину частоты, формируемые ГДЧ 41, 42 и 43, замыкая таким образом контур сопровождения сигнала по частоте.
Квадратурные составляющие разностного сжатого сигнала с выходов цифрового согласованного фильтра 16 поступают на соответствующие информационные входы фильтра 40 допплеровской частоты, на частотные входы которого поступают сигналы с соответствующих выходов генератора 43 допплеровской частоты, а на синхровход поступает сигнал с выхода элемента 54 задержки, вследствие чего ФДЧ 40 работает в стробе сопровождения цели по дальности и в центральном частотном стробе сопровождения цели для разностного канала РЛС.
Выходные синусный и косинусный сигналы ФДЧ 40 поступают соответственно на делители 52 и 53 кодов, на вторые входы которых поступают синусный и косинусный выходные сигналы ФДЧ 36, работающего в суммарном канале РЛС в тех же стробах сопровождения по дальности и частоте, что и ФДЧ 40. На выходах делителей 52 и 53 кодов формируются сигналы, равные частному от деления сигналов (синусного или косинусного) фильтра 40 допплеровской частоты разностного сигнала на одноименные сигналы фильтра 36 допплеровской частоты суммарного сигнала.
Указанные выходные сигналы делителей 52 и 53 поступают в сумматор 46 и складываются в нем. Таким образом, делители 52 и 53 и сумматор 46 образуют угловой дискриминатор. Выходной сигнал сумматора 46 через открытый сигналом конца захвата цели (с выхода дешифратора 117 конечного кода БЗХ 33) блок 49 вентилей поступают на второй вход вычитателя 29, где вычитаются из кода угла, поступающего на его первый вход из регистра 28 угла. Выходной сигнал вычитателя 29 через коммутатор 25 управляющих сигналов поступает на привод 26 антенны и таким образом замыкает контур сопровождения цели по углу.
Таким образом, в предлагаемой моноимпульсной РЛС реализуется одновременное сопровождение цели по дальности, по допплеровской частоте и по углу, обеспечивая повышение точности сопровождения и помехозащищенности РЛС по отношению к активным и пассивным помехам.
На основании приведенного описания и чертежей предлагаемое устройство может быть изготовлено при использовании известных комплектующих изделий и известного в радиоэлектронной промышленности технологического оборудования и использовано на подвижных носителях в качестве РЛС для обнаружения и сопровождения целей.
СПИСОК ЛИТЕРАТУРЫ
1. Леонов А. И. , Фомичев К. И. Моноимпульсная радиолокация. - М. : Сов. Радио. -1970 г.
2. Справочник по радиолокации. / Ред. М. Сколник. - М. : Сов. Радио. - 1978 г. - Т. 4.
3. Патент РФ 2084919, МПК G 01 S 13/44, 20.07.97 г.
4. Патент РФ 2099739, МПК G 01 S 13/42, 20.12.97 г. , прототип.
5. Справочник по радиолокации. / Ред. М. Сколник. - М. : Сов. Радио. - 1970 г. - Т. 3, С. 19-52, 103-107, 144.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ СОПРОВОЖДЕНИЯ ЦЕЛИ | 1997 |
|
RU2114444C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ МОНОИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 1997 |
|
RU2117960C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 2000 |
|
RU2176399C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1998 |
|
RU2124221C1 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОБНАРУЖЕНИЯ И САМОНАВЕДЕНИЯ | 2010 |
|
RU2439608C1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2006 |
|
RU2309430C1 |
Изобретение относится к радиолокационным системам (РЛС), преимущественно к РЛС со сложными, в частности, фазоманипулированными сигналами, используемым на подвижных носителях и предназначенным для обнаружения и сопровождения моноимпульсным способом сигналов от целей при наличии отражений от местных предметов. Технической задачей изобретения является повышение разрешающей способности обнаружения целей, точности и помехозащищенности сопровождения целей по отношению к активным и пассивным помехам при установке РЛС на подвижном носителе. Для достижения заявленного технического результата предлагается при обработке длиннобазовых фазоманипулированных сигналов с квадратурных выходов фазовых детекторов суммарного сигнала применять адаптивное многоуровневое квантование сигнала с подстройкой порогов квантования при захвате на сопровождение, измерять допплеровскую составляющую сигнала путем узкополосной допплеровской фильтрации, а при сопровождении цели замыкать с помощью узкополосных частотных фильтров контуры сопровождения по допплеровской составляющей сигнала и по дальности в суммарном канале, а выходные квадратурные составляющее узкополосного сигнала цели в разностном канале нормировать к однименным квадратурным составляющим в суммарном канале и полученную оценку углового рассогласования использовать для контура углового сопровождения цели. 8 ил.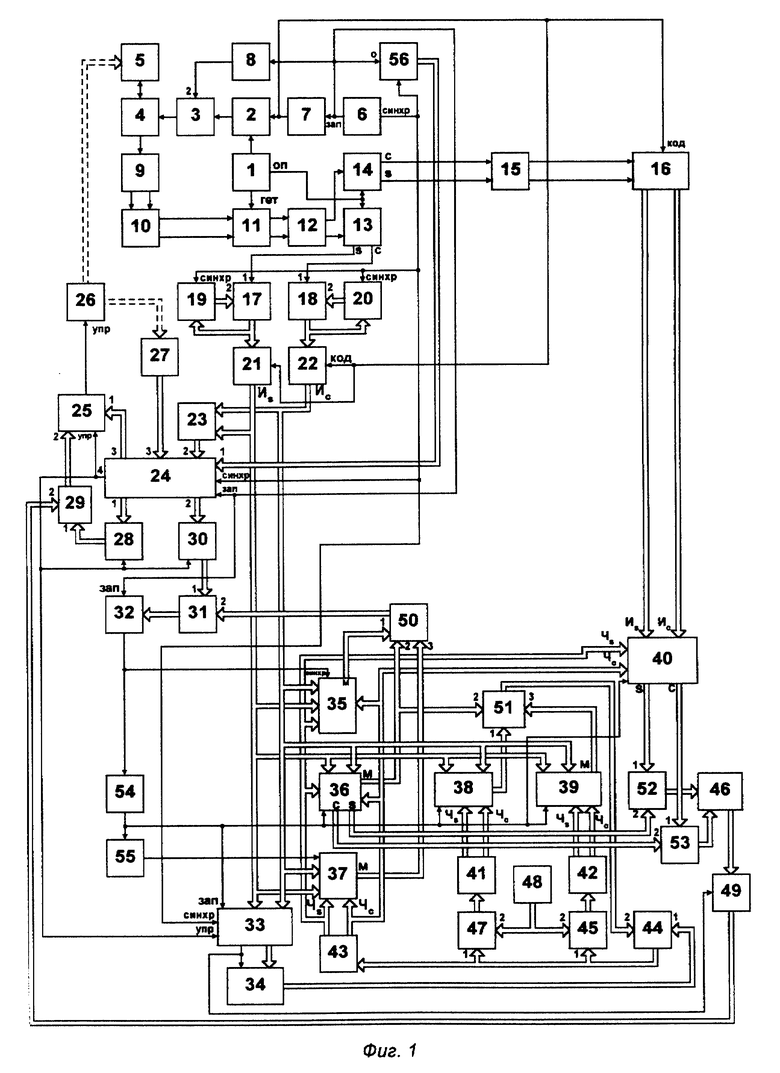
Моноимпульсная радиолокационная система, содержащая последовательно соединенные возбудитель, фазовый манипулятор и усилитель мощности, подключенный через антенный переключатель к антенне, которая кинематически связана с приводом антенны, последовательно соединенные соответствующими входами-выходами суммарного и разностного сигналов суммарно-разностный преобразователь, подключенный к третьему плечу антенного переключателя, усилитель высокой частоты, смеситель и усилитель промежуточной частоты, к соответствующим выходам которого подключены блок квадратурных фазовых детекторов суммарного сигнала и блок квадратурных фазовых детекторов разностного сигнала, синусный и косинусный выходы которого через амплитудный квантователь подключены к соответствующим информационным входам цифрового согласованного фильтра, а также импульсный модулятор и генератор кода, подключенные к выходу запускающих импульсов синхронизатора, блок объединения квадратур, дискриминатор сигнала дальности и преобразователь кода во временной интервал, при этом кодовые входы цифрового согласованного фильтра и фазового манипулятора подключены к выходу генератора кода, выходы гетеродинной и промежуточной частоты возбудителя подключены соответственно к гетеродинному входу смесителя и опорным входам блоков квадратурных фазовых детекторов суммарного и разностного сигналов, а выход импульсного модулятора подключен ко второму входу усилителя мощности, отличающаяся тем, что в нее введены первый и второй блоки компараторов, первый и второй автоматические регуляторы порога, первый и второй многоразрядные согласованные фильтры, блок обнаружения и выбора цели, датчик углового положения антенны, кинематически связанный с приводом антенны, управляющий вход которого подключен к выходу коммутатора управляющих сигналов, регистр угла, регистр дальности, блок захвата цели, первый, второй, третий, четвертый, пятый и шестой фильтры допплеровской частоты, первый, второй и третий генераторы допплеровской частоты, первый и второй вычитатели, регистр, первый, второй, третий и четвертый сумматоры, кодовая шина, блок вентилей, частотный дискриминатор, первый и второй делители кода, первый и второй элементы задержки и счетчик дальности, обнуляющий вход которого объединен со входами запуска блока обнаружения и выбора цели и преобразователя кода во временной интервал и подключен к выходу запускающих импульсов синхронизатора, выход синхронизирующих импульсов которого подключен ко входам синхронизации первого и второго автоматических регуляторов порога, блока обнаружения и выбора цели, блока захвата цели и счетчика дальности, выход которого подключен к первому входу блока обнаружения и выбора цели, второй вход которого подключен к выходу блока объединения квадратур, третий вход - к выходу датчика углового положения антенны, первый и второй выходы подключены ко входам записи соответственно регистра угла и регистра дальности, третий выход подключен к первому входу коммутатора управляющих сигналов, а четвертый выход - к управляющим входам коммутатора управляющих сигналов, блока захвата цели, регистра дальности и регистра угла, выход которого соединен с первым входом первого вычитателя, второй вход которого соединен с выходом блока вентилей, а выход - со вторым входом коммутатора управляющих сигналов, выход регистра дальности подключен к первому входу первого сумматора, второй вход которого соединен с выходом дискриминатора сигнала дальности, а выход - с информационным входом преобразователя кода во временной интервал, к выходу генератора кода подключены кодовые входы первого и второго многоразрядных согласованных фильтров, входы которых, объединенные со входами соответственно первого и второго автоматических регуляторов порога, подключены к выходам соответственно первого и второго блоков компараторов, первые входы которых подключены соответственно к синусному и косинусному выходам блока квадратурных фазовых детекторов суммарного сигнала, а вторые входы соединены с выходами соответственно первого и второго автоматических регуляторов порога, к выходам первого и второго многоразрядных согласованных фильтров подключены соответственно синусные и косинусные информационные входы блока объединения квадратур, блока захвата цели и фильтров допплеровской частоты с первого по пятый, синусные и косинусные выходы первого и второго генераторов допплеровской частоты подключены к соответствующим частотным входам соответственно четвертого и пятого фильтров допплеровской частоты, синусный и косинусный выходы третьего генератора допплеровской частоты подключены к соответствующим частотным входам первого, второго, третьего и шестого фильтров допплеровской частоты, синусный и косинусный информационные входы шестого фильтра допплеровской частоты подключены к соответствующим выходам цифрового согласованного фильтра, выход преобразователя кода во временной интервал подключен ко входу синхронизации первого фильтра допплеровской частоты и входу первого элемента задержки, выход которого подключен ко входам синхронизации второго, четвертого, пятого и шестого фильтров допплеровской частоты, входу запуска блока захвата цели и входу второго элемента задержки, выход которого подключен ко входу синхронизации третьего фильтра допплеровской частоты, синусные выходы второго и шестого фильтров допплеровской частоты подключены соответственно ко второму и первому входам первого делителя кода, а их косинусные выходы - соответственно ко второму и первому входам второго делителя кода, модульный выход второго фильтра допплеровской частоты подключен ко вторым входам дискриминатора сигнала дальности и частотного дискриминатора, модульные выходы первого и третьего фильтров допплеровской частоты подключены соответственно к первому и третьему входам дискриминатора сигнала дальности, а модульные выходы четвертого и пятого фильтров допплеровской частоты подключены соответственно к первому и третьему входам частотного дискриминатора, выход которого подключен ко второму входу второго сумматора, первый вход которого соединен с выходом регистра, а выход подключен к кодовому входу третьего генератора допплеровской частоты и к первым входам второго вычитателя и третьего сумматора, вторые входы которых подключены к кодовой шине, выходы второго вычитателя и третьего сумматора подключены к кодовым входам первого и второго генераторов допплеровской частоты, соответственно, выходы первого и второго делителей кода подключены к соответствующим входам четвертого сумматора, выход которого подключен ко входу блока вентилей, управляющий вход которого объединен со входом синхронизации регистра и подключен к управляющему выходу блока захвата цели, информационный выход которого подключен ко входу записи регистра.
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 1996 |
|
RU2099739C1 |
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1995 |
|
RU2079859C1 |
| US 4652882, 24.03.1987 | |||
| US 5175554 A, 29.12.1992 | |||
| Суппорт многошпиндельного автомата | 1972 |
|
SU490578A1 |
| US 5241318 A, 31.08.1993 | |||
| ОДНОКАНАЛЬНАЯ МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ НА ЦЕЛЬ | 1997 |
|
RU2108595C1 |

