Изобретение является устройством и относится к струйным (реактивным) движителям.
Уровень техники
Струйные движители давно известны в технике и широко применяются, например, в различных транспортных машинах. В таких движителях сила тяги возникает как реакция на выброс в окружающее пространство струи газа или жидкости, которые в таком случае принято называть «рабочим телом» движителя. Возникающая при этом сила тяги направлена в противоположную сторону от направления струи.
В ряду уже известных струйных движителей можно выделить группу движителей, использующих в качестве рабочего тела газ или жидкость той среды, в которой они движутся (находятся). Такие движители засасывают через заборные проемы газ или жидкость из окружающей среды, и затем этот газ или жидкость, пройдя по каналам движителя и через напорные устройства движителя, выбрасывается через сопло (или сопла) движителя в виде струй обратно в окружающую среду. Возникающая при этом реактивная сила является силой тяги движителя. Рабочим телом могут, например, быть атмосферный воздух или вода. Движители такого рода содержат внутри проточных каналов, по которым движется рабочее тело, упомянутые напорные устройства. Описываемый в заявке струйный движитель относится к группе именно таких движителей.
Аналоги изобретения
Отдаленными аналогами изобретения являются водометные движители, применяемые на некоторых судах и подводных лодках. Водометные движители таких судов используют забортную воду в качестве рабочего тела. Напорные устройства, содержащиеся в таких движителях, обеспечивают всасывание забортной воды через заборные устройства и выброс ее через сопла, создавая реактивную тягу. Сопла таких движителей, как правило, являются отклоняемыми (поворотными), что обеспечивает управление направлением выброса струи и, тем самым, управление направлением тяги и момента тяги движителя (управление вектором тяги) и поворот судна. Однако, упомянутые водометные движители не обеспечивают изменение на обратное (реверсирование) направление потока рабочего тела по каналам движителя и не обеспечивают управление направлением вектора тяги и вектора момента тяги всенаправленно в пространстве (в диапазоне полного телесного угла) относительно самого движителя.
Более близким аналогом является носовое подруливающее устройство, описанное в патенте Великобритании GB 1389532 A (опубликован 3 апр. 1975 г.), которое обеспечивает реверс потоков рабочего тела по каналам движителя и допускает (с ограниченной эффективностью) возможность изменения направления тяги движителя в диапазоне пространственных углов, в пределах, ограниченных полусферой. Конструкция подруливающего устройства, показанного в указанном выше патенте, позволяет лишь потенциально, при помощи определенной, не упомянутой в указанном патенте модификации системы управления, обеспечить управление суммарным для всех сопел этого подруливающего устройства направлением вектора тяги и не позволяет управлять моментом тяги устройства (что для упомянутого подруливающего устройства не нужно).
Наиболее близкий аналог (прототип)
Наиболее близким аналогом (прототипом) заявленного изобретения является вариант движителя с восемью соплами, соединенными проточными каналами по схеме простой пространственной многолучевой звезды, описанный в патенте Российской Федерации RU 2431583 на изобретение «Струйный движитель с управляемым вектором тяги» (опубликован 20 окт. 2011 г.) и патенте Канады СА 2838700 (опубликован 15 мар. 2016 г.). Признаками прототипа (наиболее близкого варианта выполнения устройства по указанным патентам), до определенной степени совпадающими с признаками конструкции предлагаемого устройства, являются восемь сопел с дефлекторами, соединенных системой каналов, и напорные устройства в каналах. Прототип, также как предлагаемое устройство, обеспечивает одновременное и независимое управление векторами тяги и момента тяги движителя в полном телесном угле.
Предлагаемый движитель, также как и прототип, является многосопловым (восьмисопловым) струйным движителем, использующим газ или жидкость окружающей среды в качестве рабочего тела, и, как и прототип, предназначен для одновременного и независимого формирования и управления силой тяги (вектором тяги) и моментом тяги (вектором момента тяги) всенаправленно в пространстве (то есть, в диапазоне полного телесного угла), и также оснащен соплами с дефлекторами выбрасываемой струи, которые соединены между собой системой проточных каналов.
Предназначение, применимость и востребованность движителя предполагаются теми же, что и у прототипа. То есть, движитель предназначен для оснащения транспортных машин, перемещающихся в трехмерной среде, жидкой (например, в толще воды) или газовой (например, в воздухе), и обеспечения одновременно и независимо тяги в любом пространственном направлении (в полном телесном угле) и момента тяги в любом пространственном направлении (усилия вращения вокруг оси, произвольно расположенной в пространстве относительно самого движителя). Неисключающими примерами таких транспортных машин могут служить подводные суда и дирижабли.
В отличие от прототипа, у которого система проточных каналов образует конфигурацию - простая пространственная звезда (далее, «простая звезда»), когда все каналы движителя присоединены одним концом к центральной камере, система каналов предлагаемого движителя имеет более сложную конструкцию и содержит центральный канал, четыре промежуточных канала, присоединенные по два к каждому из концов центрального канала, и восемь активных каналов (являющихся оконечными), присоединенные по два к другим концам промежуточных каналов (далее «сложная разветвленная звезда»). Каждый из восьми упомянутых активных каналов присоединен другим своим концом к одному из восьми сопел движителя и снабжен управляемыми реверсивными напорными устройствами.
Технической проблемой, для решения которой предназначен предлагаемый движитель, является увеличение эффективности работы движителя такого рода, обеспечиваемое за счет уменьшения гидродинамических (газодинамических) потерь энергии в потоках рабочего тела в проточных каналах предлагаемого движителя, что достигается применением системы проточных каналов новой конструкции «сложная разветвленная звезда». В прототипе это не достижимо из-за примененной конструктивной схемы проточных каналов «простая звезда».
Техническим результатом, обеспечиваемым предлагаемым изобретением, является уменьшение гидродинамических (газодинамических) непроизводительных потерь энергии в потоках рабочего тела в проточных каналах движителя и увеличение за счет этого его эффективности. Увеличение эффективности движителя проявляется в улучшении его экономичности, увеличении полезной мощности, увеличении силы тяги и момента тяги по сравнению с прототипом (при прочих равных с прототипом условиях).
Также предлагаемая конструкция движителя расширяет ряд применимых конструктивных решений для движителей такого рода, то есть, расширяет арсенал струйных движителей.
Пояснения к используемым терминам
Общепринятые термины: «транспортная машина», «транспортный механизм», «транспортное средство» - далее в тексте понимаются и применяются как эквивалентные в рамках данной заявки.
Окружающая среда - это однородное пространство, заполненное газом или жидкостью, в котором находится и/или движется транспортное средство.
Под термином «сопло» далее в тексте понимается любое устройство или узел, а также открытое в пространство простое окончание канала движителя, через которые обеспечивается выброс рабочего тела из движителя в пространство.
Под термином «устройства управления направлением выброса струи из сопла» понимаются любые известные и предназначенные для этого устройства. Их неограничивающим примерами могут быть управляемые дефлекторы (наборы управляемых параллельно расположенных пластин) или отклоняемые или изгибаемые патрубки, или более сложные многокомпонентные устройства отклонения струи.
Под термином «канал» движителя понимается любой узел или сочетание нескольких узлов, которые в совокупности образуют туннель и обеспечивают проток рабочего тела внутри движителя.
Под терминами «напорное устройство в канале», «управляемое напорное устройство» понимается одиночное устройство или узел, а также комплекс устройств или узлов, например, встроенный в канал. Такое устройство предполагается (а) снабженным тем или иным силовым приводом, (б) обеспечивающим регулирование напора, создаваемого этим устройством в потоке рабочего тела в канале, и (в) обеспечивающим возможность изменения направления, в котором оно создает напор, на противоположное.
Термины «гидродинамическое сопротивление», «газодинамическое сопротивление» в заявке имеют совпадающий смысл, так как общепринятым является допущение, что для случая существенно дозвуковых скоростей движение газа в незамкнутых пространствах, как это и происходит в описываемом движителе, является в значительной степени подобным движению легкой жидкости.
Под терминами «вектор тяги движителя», «суммарный вектор тяги движителя» в тексте заявки понимается векторная сумма всех векторов тяги сопел движителя.
Под терминами «вектор тяги сопла», понимается сила тяги (реактивная сила), возникающая при выбросе из сопла струи рабочего тела и направленная в сторону, противоположную направлению выброса струи.
Под терминами «вектор момента тяги движителя», «суммарный вектор момента тяги движителя» в заявке понимается векторная сумма моментов сил (поворачивающих усилий), создаваемых соплами и стремящихся повернуть движитель вокруг пространственных осей, - например, вокруг продольной, поперечной и вертикальной оси. Каждое сопло создает ненулевой момент силы в случае, когда направление вектора тяги сопла не проходит через точку центра масс транспортной машины, в состав которой входит движитель.
Под термином «вектор момента тяги сопла» в заявке подразумевается общепринятое в физике и технике определение этой векторной величины как векторного произведения радиус-вектора, построенного из центра масс к месту расположения сопла, на вектор тяги сопла.
Также везде в заявке имеется ввиду, что при описании работы движителя всегда предполагается дозвуковая скорость движения рабочего тела относительно элементов конструкции движителя. Движитель предназначен для работы на дозвуковых скоростях.
Раскрытие сущности изобретения
Изобретение представляет собой многосопловый струйный движитель,
использующий для работы газ или жидкость окружающей среды. Движитель содержит восемь сопел, расположенных центрально-симметрично и соединенных между собой системой каналов, и напорные устройства в каналах для управления величиной и направлением напора в потоке рабочего тела в указанной системе каналов. При этом каждое из указанных сопел выполнено с возможностью управления направлением выброса струи рабочего тела во внешнюю среду. Каждое из сопел обеспечивает, в зависимости от режима его работы в данный момент, как поступление рабочего тела из внешней среды в движитель, так и выброс рабочего тела из движителя во внешнюю среду. Система каналов движителя содержит в своем составе восемь каналов с напорными устройствами (далее - «активные каналы»), четыре промежуточных канала и центральный канал. При этом каждый из этих восьми активных каналов с напорными устройствами присоединен одним концом к одному из указанных сопел. Все активные каналы с напорными устройствами другими своими концами попарно соединены друг с другом, образуя тем самым в местах их соединения четыре узла соединения активных каналов. К каждому из этих узлов соединения активных каналов присоединен одним своим концом один из четырех промежуточных каналов. Четыре промежуточных канала другими своими концами соединены попарно между собой, образуя два узла соединения промежуточных каналов, а центральный канал присоединен своими концами к указанным двум узлам соединения промежуточных каналов.
Заявленная конструкция каналов движителя обеспечивает минимизацию внутренних потерь и максимальную эффективность движителя для всех случаев, когда движитель имеет общие (габаритные) длину, ширину и высоту, не равные друг другу. Уменьшение внутренних потерь в проточных каналах движителя по сравнению с прототипом достигается, главным образом, за счет укорачивания путей потоков рабочего тела по каналам на ряде режимов работы движителя, что уменьшает гидродинамические (газодинамические) потери в потоках, и спрямления путей потоков рабочего тела, то есть, уменьшения суммарного угла поворотов потоков рабочего тела на ряде режимов работы движителя, что также обеспечивает уменьшение гидродинамических (газодинамических) потерь в потоках рабочего тела за счет спрямления этих потоков.
Напорные устройства в указанных активных каналах являются управляемыми и обеспечивают управление напором в потоке рабочего тела в соответствующем канале в обоих направлениях, как от сопла, так и к соплу. Сопла оснащены управляемыми устройствами отклонения направления выброса струи рабочего тела. Сопла обеспечивают, в зависимости от режима работы, как выброс струи рабочего тела из движителя, так и поступление газа или жидкости окружающей среды в движитель через сопло для использования в качестве рабочего тела.
При работе движителя за счет работы напорных устройств обеспечивается одновременное поступление равного количества рабочего тела (газа или жидкости) из окружающей среды в движитель через одно или несколько сопел и выброс того же количества рабочего тела через одно или несколько других сопел обратно в окружающую среду в виде направленных струй. Скорость (расход) выброса струи определяется работой напорных устройств движителя, а направление выброса струи из каждого сопла задается управляемым устройством отклонения направления выброса соответствующего сопла. Скорость и направление струи определяют величину и направление (противоположное направлению выброса) тяги соответствующего сопла движителя. Векторная сумма сил всех сопел, работающих на выброс струи рабочего тела, составляет суммарную силу тяги и суммарный момент силы тяги движителя. Пространственная симметрия расположения сопел движителя, универсальность работы каждого сопла на всасывание или выброс рабочего тела и управление направлением выброса струй рабочего тела из каждого сопла обеспечивают для движителя возможность формирования любого по направлению, в диапазоне полного телесного угла, и величине (в пределах максимума, задаваемого конструктивно, в зависимости от предназначения движителя) усилия тяги и, аналогичным образом, любого по направлению и величине момента тяги одновременно. Движитель в состоянии обеспечить высокую скорость управления этими параметрами тяги, что обеспечивает высокий уровень управляемости для транспортного средства, оснащенного таким движителем.
Предлагаемая в заявке новая компоновочная схема проточных каналов движителя обеспечивает существенно иное по сравнению с прототипом распределение и движение потоков рабочего тела по каналам движителя, что уменьшает внутренние потери в движителе и обеспечивает повышение экономичности и/или эффективности предлагаемого движителя по сравнению с прототипом. Повышение эффективности движителя при заданной тяге движителя уменьшает энергозатраты и расход топлива, а при заданной максимальной мощности привода движителя обеспечивает большую тягу движителя. Улучшение этих параметров имеет большое практическое значение.
Увеличение эффективности достигается за счет уменьшения внутренних гидродинамических (газодинамических) потерь энергии в потоках рабочего тела при движении последнего по системе проточных каналов движителя. Эффект уменьшения потерь, при этом, достигается за счет применения системы проточных каналов движителя новой конструкции. Общий (суммарный) эффект уменьшения потерь в предлагаемом движителе складывается как результат действия нескольких разных эффектов уменьшения потерь, каждый из которых, при этом, является результатом применения в движителе системы проточных каналов «сложная звезда». Характер этих различных эффектов уменьшения потерь, возникающих при использовании системы каналов предлагаемой конфигурации, описывается далее.
При описании сравнительной эффективности прототипа и предлагаемого в заявке движителя далее везде в заявке два упомянутых движителя (предлагаемый движитель и прототип) сравниваются в предположении их возможно полной сопоставимости по всем остальным техническим параметрам, кроме конструктивно разных систем проточных каналов. Это означает, что при сравнении предлагаемого движителя с прототипом подразумевается (а) равенство сравниваемых движителей по размерам конструкции (общая длина, ширина и высота движителя), (б) равенство сравниваемых движителей по объему пространства, занимаемого внутри корпуса транспортной машины (это, фактически, параметр сопоставимости площади характерных сечений просветов каналов), (в) оснащенность сравниваемых движителей полностью одинаковыми напорными устройствами, соплами и дефлекторами, (г) проточные каналы прототипа и предлагаемого движителя имеют конструкцию, обеспечивающую максимальную для их конфигурации эффективность. Эффективность работы прототипа и предлагаемого движителя сравниваются при одинаковых режимах работы, так как движители имеют одинаковую функциональность и по этой причине допускают такое сравнение. Указанные условия сравнения с прототипом являются необходимыми и достаточными для адекватного сравнения.
Все описываемые далее факторы, уменьшающие потери в движителе, имеют место для любой адекватно сопоставимой пары «прототип - предлагаемый движитель». При этом, соответствующее увеличение эффективности ожидается для движителей с любым соотношением длины, ширины и высоты, за исключением случая, когда длина, ширина и высота предлагаемого движителя и, соответственно, сравнимого с ним прототипа, равны между собой (длина равна ширине и равна высоте). При таком соотношении указанных размерений предлагаемый движитель и прототип перестают отличаться по конструкции и преимуществ друг перед другом не имеют. Обеспечение движителем максимально высокой эффективности для движителей такого рода при конфигурации со значительной разницей между величинами длины, ширины и высоты движителя (что можно себе представить, например, в виде удлиненного и приплюснутого в высоту движителя) является одной из главных задач, на решение которой направлено предлагаемое изобретение. Эта задача представляется востребованной (при применении такого рода движителей) для оснащения транспортных машин, предназначенных для движения в жидких и газовых средах и имеющих удлиненную и приплюснутую общую форму корпуса. Неисключающим примером корпуса такого рода может служить корпус в форме трехосного эллипсоида (или близкой к такой форме).
В заявке не приводятся полные и строгие расчеты эффективности сравниваемых движителей ввиду своей значительной сложности и большого объема, что в свою очередь связано с необходимостью рассмотрения очень большого (неограниченного) количества вариантов конфигурации (пропорций) и типоразмеров сравниваемых движителей и прототипов. Способы работы движителя, обеспечивающие повышение эффективности по сравнению с прототипом, описываются далее как неисключающие примеры, и даны для пояснения осуществимости и работоспособности описываемого движителя без строгого рассмотрения при этом вопросов уменьшения потерь в сравнении с сопоставимыми прототипами. При описании работы движителя (далее) сделаны лишь некоторые комментарии, поясняющие, например, прохождение потоков по очевидно более коротким путям в системе проточных каналов предлагаемого движителя. Такой подход к описанию движителя связан с тем, что патентная защита в заявке испрашивается только на само устройство (движитель) и методы его работы описаны в минимально необходимом для этого объеме.
Упомянутое уменьшение потерь в потоках рабочего тела достигается в предлагаемом движителе как совокупность действия нескольких разных факторов, при этом, все эти факторы, как будет показано далее, обусловлены применением измененной конструкции проточных каналов предлагаемого движителя. Описываемые эффекты уменьшения потерь могут действовать все одновременно или в любых сочетания, что зависит от конкретных режимов работы движителя.
Улучшение эффективности предлагаемого движителя по сравнению с прототипом обуславливается следующими факторами:
(А) На ряде режимов работы предлагаемого движителя потоки рабочего тела в его проточных каналах проходят по более коротким путям по сравнению с сопоставимым прототипом на таком же режиме работы, что обеспечивается за счет применения конструктивной схемы каналов «сложная разветвленная звезда» вместо «простой звезды» в прототипе. При этом потоки рабочего тела движутся либо минуя центральный канал движителя, либо минуя центральный и часть, либо все промежуточные каналы движителя. Некоторые неисключающие примеры таких режимов рассмотрены подробнее далее в разделе заявки «Описание работы движителя». Такие более короткие пути потоков рабочего тела (по сравнению с прототипом на сравнимых режимах) уменьшают гидродинамические потери энергии в потоках за счет меньшего гидродинамического сопротивления (при прочих равных условиях) более коротких каналов, что ведет к повышению эффективности движителя по сравнению с прототипом. Для прототипа это недостижимо из-за примененной в нем конструктивной схемы проточных каналов «простая звезда». Строгое и полное описание указанного явления и количественные расчеты сложны и имеют большой объем и по этой причине в заявке не приведены. Описанное улучшение эффективности в этом случае достигается за счет применения новой конструкции системы проточных каналов движителя.
(Б) Предлагаемый движитель также обеспечивает (на тех режимах, на которых реализуется движение рабочего тела по укороченным путям) меньшую сумму углов поворота потока (суммарный угол, если поворотов в потоке несколько) по сравнению с аналогичным по функциям режимом работы сопоставимого прототипа («спрямленные» пути). Такие «спрямленные» пути потоков рабочего тела, при прочих равных условиях, уменьшают потери энергии в потоках за счет уменьшения связанного с этим суммарного гидродинамического сопротивления, что ведет к повышению эффективности движителя.
(В) Ряд режимов работы предлагаемого движителя предполагает движение потоков рабочего тела по его центральному и/или промежуточным каналам (подробнее некоторые из таких режимов описаны, как неисключающие примеры, далее в разделе заявки «Описание работы движителя»). При этом, по каждому промежуточному каналу проходят суммарные потоки двух присоединенных к нему оконечных каналов. Такая конструкция каналов допускает применение промежуточных каналов с внутренним сечением (просветом), равным сумме внутренних сечений двух оконечных каналов (как неисключающий пример), что уменьшает гидродинамическое сопротивление на участке промежуточных каналов движителяза счет пропуска «двойного» потока по одному суммарного сечения, что невозможно в прототипе из-за его конструкции «простая звезда». Аналогично, по центральному каналу предлагаемого движителя проходят суммарные потоки от каждой пары промежуточных каналов. Такая конструкция позволяет применение центрального канала с сечением, равным сумме сечений пары промежуточных каналов, что обеспечивает снижение гидродинамического сопротивления на участке центрального канала. В прототипе это недостижимо из-за применения конструкции каналов «простая звезда». Строгие и полные выкладки и расчеты этого явления также имеют значительный объем и поэтому не приводятся в заявке.
Как отмечалось выше, описанные факторы «А», «Б» и «В» уменьшения потерь могут проявлять себя на различных режимах работы движителя как по отдельности, так и в любых сочетаниях.
Краткое описание чертежей
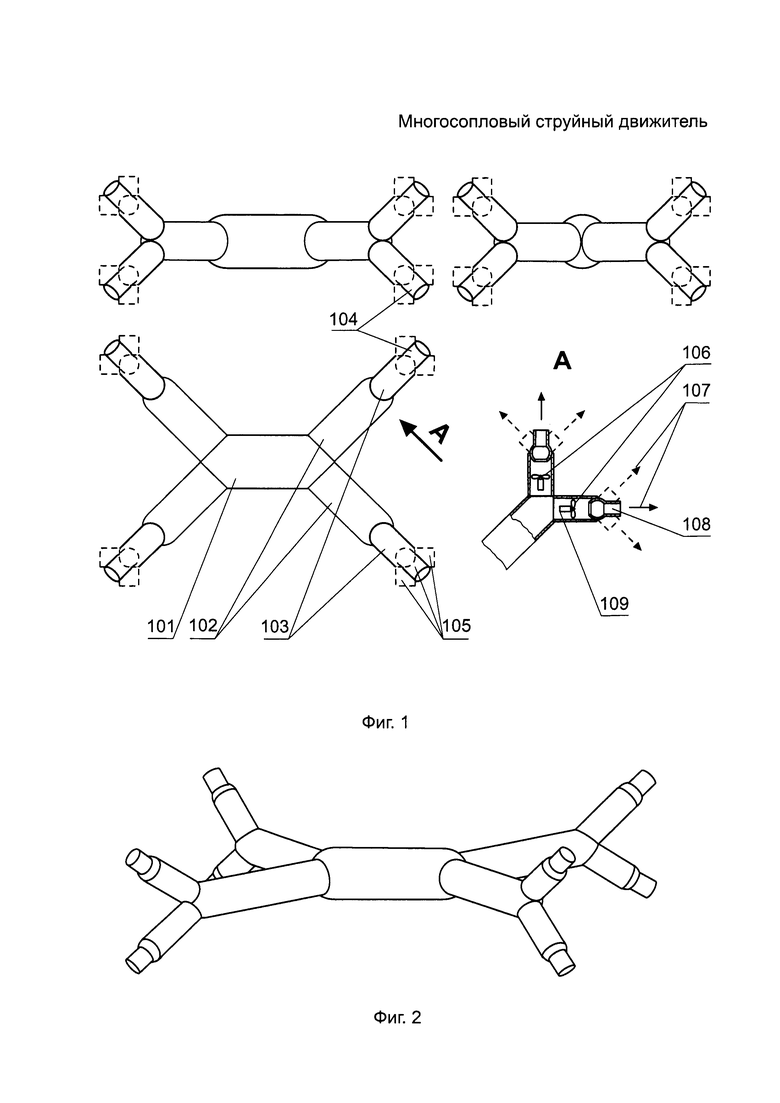
На фигуре 1 изображен предлагаемый движитель в трех проекциях.
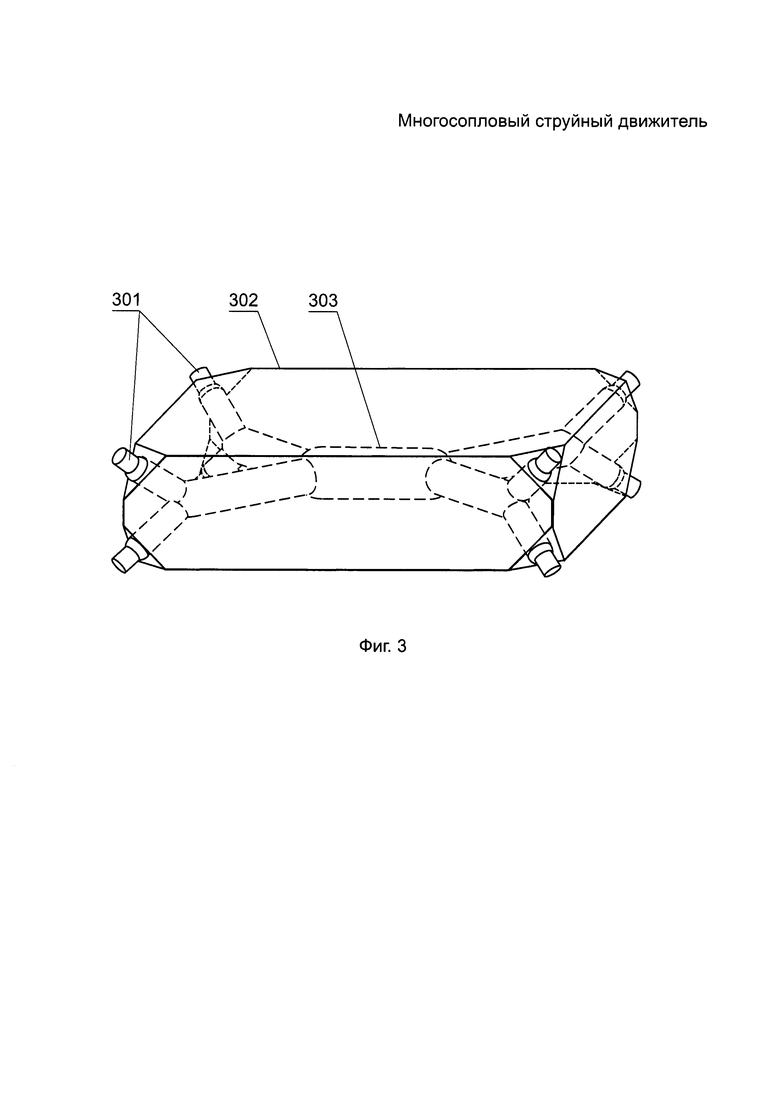
На фиг. 2 показан общий вид описываемого движителя.
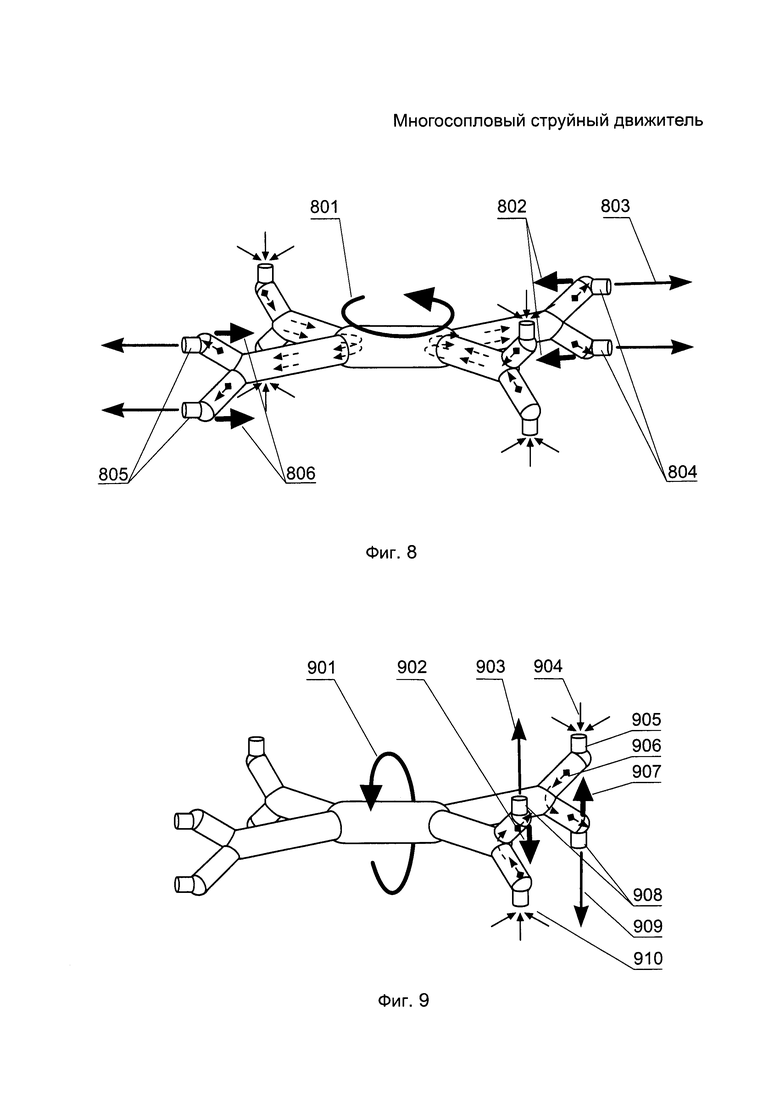
На фиг. 3 показано расположение движителя в корпусе транспортной машины.
На фигурах 4-11 показаны различные режимы работы движителя, обеспечивающие тягу в направлениях, указанных на этих чертежах.
Осуществление изобретения
Описание конструкции движителя
На фиг. 1 показан эскиз движителя в трех проекциях. Движитель оснащен восемью соплами 104, которые соединены между собой системой каналов 101, 102, 103. Расходным рабочим телом для движителя служит газ или жидкость из окружающей среды, в которой работает движитель (не показана). При этом, восемь каналов 103 движителя, присоединенные к соплам 104, оснащены управляемыми реверсивными напорными устройствами 106, которые для определенности изображены, в качестве неограничивающего примера, в виде пропеллеров (для газа) или гребных винтов (для жидкости), каждый из которых присоединен к силовому приводу (не показаны). Все сопла движителя оснащены управляемыми отклоняющими устройствами 108, которые для определенности изображены, в качестве неограничивающего примера, в виде отклоняемых патрубков. Отклоняющие устройства управляют направлением выброса струи 107 рабочего тела из сопла 104, что показывают пунктирные изображения отклоняемых патрубков в нескольких крайних положениях 105. Каждое сопло 104 обеспечивает как выброс струи рабочего тела из движителя, так и поступление газа или жидкости из окружающей среды в движитель для использования в качестве рабочего тела движителя, что обеспечивается изменением направления напора в напорных устройствах 106 (реверс напора).
Как показано на фигурах 1 и 2, восемь сопел 104 расположены в вершинах воображаемого параллелепипеда (как неограничивающий пример). К каждому из сопел присоединен канал 103 (активный канал), оснащенный (как показано на дополнительном виде А фигуры 1) напорным устройством 106. При этом, для каждого напорного устройства 106 движителя обеспечивается возможность управления как величиной напора, так и его направлением (реверсивные напорные устройства). Пунктирными контурами 105 показаны (как неограничивающий пример) крайние положения, которые могут занимать устройства отклонения струи 107, выбрасываемой из сопла 104.
Как видно на фиг. 1, активные каналы 103 другими своими концами присоединены попарно к промежуточным каналам 102. В месте соединения каналов 102 и 103 обеспечивается свободное перетекание расходного рабочего тела (газа или жидкости) из любого канала в любой другой.
При этом, промежуточные каналы 102 другими своими концами попарно присоединены к двум концам центрального канала 101. В местах соединения каналов 102 и 101 обеспечивается свободное перетекание рабочего тела из любого канала в любой другой.
На фиг. 2 показан общий вид этого движителя. Общий вид наглядно показывает сложную пространственную конфигурацию каналов, представляющую собой трехмерную (то есть, не располагающуюся в одной плоскости) звезду, с добавленным в центре звезды центральным каналом.
На фиг. 3 показана, как неограничивающий пример, схема компоновки движителя 303 в корпусе 302 транспортной машины, имеющем форму параллелепипеда со срезанными вершинами. Движитель при этом располагается внутри корпуса, а управляемые сопла 301 - снаружи.
Так же, как прототип, движитель обеспечивает исключительно высокий уровень управляемости транспортной машиной и позволяет обеспечить быстродействующее управление векторами тяги и момента тяги в диапазоне полного телесного угла. При этом, описываемая здесь схема соединения каналов движителя обеспечивает значительно меньшие, по сравнению с прототипом, внутренние потери в движителе. Это улучшает экономичность и эффективность движителя.
Описанная конструкция движителя оптимальна для применения на транспортных машинах, двигающихся в трехмерной газовой или жидкой среде, как неограничивающий пример, в воздухе или под водой. Движитель предназначен, как неограничивающий пример, для встраивания внутрь корпуса транспортных машин. Неограничивающими примерами таких транспортных машин могут служить, например, подводные лодки для случая жидкой среды или дирижабли как неограничивающий пример транспортной машины в газовой (здесь воздушной) окружающей среде.
Узлы движителя
Сопла движителя
Рациональным, но неограничивающим примером взаимного расположения сопел 104 движителя является вариант расположения их вблизи вершин воображаемого параллелепипеда.
Такой пример расположения сопел отображен для определенности на всех фигурах заявки.
Управляемые сопла движителя обеспечивают управляемое изменение направления выброса струи рабочего тела. Неограничивающими примерами таких сопел могут служить отклоняемые насадки сопел, как это изображено на виде А фигуры 1.
Напорные устройства
Напорные устройства 106, показанные на фиг. 1, обеспечивают, за счет создаваемого перепада давлений, движение потоков рабочего тела в движителе. Для изображенных на фигуре 1 пропеллеров (гребных винтов) 106 это обеспечивается, как неограничивающий пример, применением лопастей пропеллера (гребного винта) с управляемым шагом и возможностью установки отрицательного угла атаки (шага) лопастей, что обеспечивает управляемое изменение как величины, так и направления тяги пропеллера (гребного винта). Другим неограничивающим примером, обеспечивающим реверс напора, может служить пропеллер или гребной винт с фиксированным углом установки лопастей и с возможностью вращения пропеллера (гребного винта) в двух противоположных направлениях, что также обеспечивает реверс напора.
Еще одним неограничивающим примером напорного узла с реверсом напора может служить узел, состоящий из двух или нескольких описанных выше напорных узлов, работающих как единое напорное устройство.
В заявке везде подразумевается, что напорные устройства 106 имеют тот или иной силовой привод, условно показанный на всех фигурах заявки подобно блоку 109 фигуры 1. Неограничивающими примерами таких силовых приводов могут служить отдельный мотор, присоединенный к пропеллеру (или гребному винту), или присоединенная к пропеллеру (гребному винту) трансмиссия, обеспечивающая подвод энергии и работу напорного устройства.
Проточные каналы движителя
Система проточных каналов движителя предназначена для соединения между собой всех сопел движителя и обеспечения протока по ним потоков рабочего тела. Каналы, непосредственно присоединенные к соплам, также содержат напорные устройства. Каналы движителя соединены по схеме «сложноразветвленная пространственная звезда с центральным каналом». Конструкция (конфигурация) каналов показана, например, на фиг. 1.
На фиг. 3 показана, как неограничивающий пример, схема компоновки каналов движителя внутри корпуса транспортной машины.
Описание работы движителя
Работа движителя основана на известном принципе создания тяги как реакции на выброс из сопла струи рабочего тела, например, жидкости или газа. Отличительной особенностью работы описываемого движителя является возможность обеспечения управления тягой (вектором суммарной тяги всех сопел) и моментом тяги (вектором суммарного момента тяги всех сопел) в диапазоне полного телесного (пространственного) угла, относительно самого движителя.
Для обеспечения возможности такого управления векторами тяги и суммарной тяги в движителе реализована возможность забора газа или жидкости из окружающей среды (для использования в качестве рабочего тела) через одно или несколько сопел движителя. Одновременно с этим, движитель обеспечивает возможность выброса струи (струй) рабочего тела через одно или несколько других сопел с целью формирования требуемого в данный момент суммарного вектора тяги и суммарного вектора момента тяги.
Режим работы каждого сопла - на «забор» рабочего тела из окружающей среды или на выброс струи рабочего тела в окружающую среду определяется, главным образом, режимом работы напорного устройства в канале, непосредственно присоединенном к этому соплу, и в меньшей степени -режимами работы напорных устройств в других каналах.
Все сопла движителя оснащены устройствами управления направлением выброса струи рабочего тела.
Предлагаемая измененная по сравнению с прототипом конструкция (компоновка) каналов движителя обеспечивает повышение эффективности движителя за счет уменьшения внутренних потерь в движителе.
Работа движителя далее описывается на нескольких неограничивающих примерах реализации ряда режимов его работы.
Общие принципы работы движителя описаны со ссылками на фиг. 1. Во время работы движителя газ или жидкость из окружающей среды поступает внутрь движителя через некоторые (одно или несколько) из восьми его сопел 104, проходит по каналам 101, 102, 103 движителя и затем выбрасывается обратно в окружающую среду в виде направленных струй через другие сопла движителя. Возникающие при выбросе струй рабочего тела реактивные силы формируют суммарную силу тяги движителя и суммарный момент тяги движителя (поворачивающее усилие).
Поступление рабочего тела в движитель, движение рабочего тела по каналам и выброс струй рабочего тела из сопел обеспечиваются за счет работы напорных устройств 106 в восьми активных каналах 103 движителя (каналы, которые непосредственно примыкают к восьми соплам 104).
Режим работы сопла 104 «на забор рабочего тела извне» обеспечивается соответствующим направлением напора напорного устройства 106, примыкающего к соответствующему соплу активного канала. Напорное устройство 106 создает напор (перепад давлений), обеспечивающий понижение давления в сопле, что обеспечивает приток газа или жидкости из окружающей среды в сопло. В результате через сопло 104 обеспечивается поступление газа или жидкости из окружающей среды.
Работа сопла 104 «на выброс струи» обеспечивается работой напорного устройства 106 канала, непосредственно примыкающего к соответствующему соплу 104 и создающего напор в направлении к соплу. При этом устройство 108 управления направлением выброса струи из сопла 104 обеспечивает необходимое направление выброса струи. Возникающая при этом реактивная сила по величине прямо зависит от интенсивности струи (то есть, от секундного расхода и скорости струи), по направлению противоположна направлению выброса струи рабочего тела из сопла и приложена к корпусу сопла вдоль оси струи. Вектор тяги каждого сопла может меняться по величине от нуля до некоторого максимального значения, задаваемого конструктивно, а по направлению - в некотором, также конструктивно задаваемом, телесном угле.
Каждое из сопел 104 движителя в каждый конкретный момент работы движителя работает либо на выброс струи рабочего тела из движителя, либо обеспечивает поступление рабочего тела в движитель (за исключением точки нулевого расхода через сопло). При этом интенсивность выброса рабочего тела или интенсивность его поступления через конкретное сопло 104 в каждый момент времени может регулироваться с помощью напорного устройства 106 активного канала 103 соответствующего сопла в широких пределах от нуля до максимальной интенсивности. В этот диапазон расходов рабочего тела попадает и точка нулевого расхода, когда рабочее тело через сопло не поступает и не выбрасывается.
Векторы тяги всех сопел, работающих на выброс рабочего тела, суммируются по известным законам сложения векторных величин и формируют суммарный вектор тяги движителя и суммарный вектор момента тяги.
Показанное на фиг. 1 и на других фигурах расположение сопел 104 относительно всего движителя в вершинах воображаемого параллелепипеда (как неограничивающий пример) обеспечивает для движителя возможность формирования векторов тяги и момента тяги в любом пространственном направлении, то есть в диапазоне полного телесного угла.
Момент тяги движителя представляет собой поворачивающее усилие движителя вокруг воображаемой оси, вообще говоря, произвольным образом ориентированной в пространстве. В терминах векторного представления моментов сил, когда момент сил представлен вектором, сформированным по известному правилу «буравчика», движитель обеспечивает формирование вектора момента сил произвольного направления, то есть в диапазоне полного телесного угла.
В общем случае движение рабочего тела по каналам движителя описывается весьма сложным комплексом взаимозависимостей, так как каждое напорное устройство при работе влияет на потоки рабочего тела во всех каналах движителя. Приведенные в заявке примеры работы движителя описывают происходящие в движителе «в первом приближении» главные и существенные явления без упоминания всех (менее значимых) взаимозависимостей. При этом все приведенные в описании работы движителя разъяснения остаются верными, хотя и носят упрощенный характер.
Конструкция движителя обеспечивает возможность формирования в любой момент времени любого по направлению вектора тяги и любого по направлению вектора момента тяги одновременно. При этом обеспечивается возможность использовать при необходимости для решения любой из двух указанных задач полную располагаемую мощность движителя, так как и максимальная тяга, и максимальный момент тяги формируются при работе на полную мощность всех напорных устройств 106 движителя. При этом располагаемая мощность движителя может быть и должна быть заданным образом распределена между задачами формирования тяги и момента тяги, сообразно текущей задаче движителя и всей транспортной машины. Реализуемый в каждый текущий момент времени режим работы движителя, вообще говоря, всегда представляет собой разумным (оптимальным) образом сформированную суперпозицию двух частичных режимов - формирования тяги и формирования момента тяги.
При работе движителя всегда задается режим, когда одно или несколько сопел 104 обеспечивают выброс рабочего тела, а одно или несколько других сопел 104 обеспечивают поступление рабочего тела в движитель. Восемь сопел движителя обеспечивают большой набор таких комбинаций. При этом наиболее интенсивными являются режимы, когда четыре сопла обеспечивают поступление рабочего тела, а четыре других сопла обеспечивают выброс рабочего тела и формирование необходимой в данный момент комбинации суммарной тяги и суммарного момента тяги (поворачивающего усилия). Поскольку любое сопло 104 предлагаемого движителя может использоваться как для поступления рабочего тела извне, так и для выброса струй рабочего тела вовне, имеется очень большое (по существу, неограниченное) количество комбинаций, формирующих необходимые суммарные векторы тяги и момента тяги.
Примеры режимов работы движителя
На фиг. 4 показан, как неограничивающий пример, наиболее общий (в котором задействованы все узлы движителя) режим работы движителя. Тройные стрелки 401 показывают поступление через соответствующие сопла газа или жидкости из окружающей среды для использования в качестве рабочего тела. Это происходит под воздействием разрежения, образованного в соответствующих каналах работой «на всасывание» напорных устройств, что условно показано пунктирными стрелками 407 с ромбом. Пунктирные стрелки 402 показывают движение рабочего тела по каналам движителя. Большая стрелка 403 показывает направление суммарной тяги движителя «влево» в этом режиме работы. Короткие толстые стрелки 404 показывают силу тяги соответствующего сопла, которая, в свою очередь, возникает как реакция на выброс из сопла струи рабочего тела в направлениях, показанных стрелками 405. Тяга в направлении, указанном стрелкой 403, является векторной суммой равных по направлению и величине усилий 404 тяги четырех правых сопел изображенного устройства.
Необходимая тяга формируется за счет показанных режимов работы напорных устройств, работающих на всасывание (показано стрелками 407) через сопла 408 и работающих на выброс (показано стрелками 406) рабочего тела через сопла 409, а также положения направляющих устройств четырех работающих на выброс сопел 409 изображенного устройства, задающих направление 405 выброса струй рабочего тела и формирующих силу тяги 404 каждого из этих сопел.
Такой режим работы движителя обеспечивает, как неограничивающий пример, прямолинейное движение транспортной машины.
На фиг. 5 показан, как неограничивающий пример, режим работы движителя, формирующего тягу в направлении, указанном стрелкой 502. Сопла 504, 507 движителя направляют струи рабочего тела в направлении, указанном стрелками 505, 511, чем обеспечивают тягу 509, 503 сопел и суммарную тягу в направлении, указанном стрелкой 502. При этом поступление (всасывание) рабочего тела в движитель обеспечивается через четыре сопла 501 (второе сопло 501 не видно на фигуре), 506. Пунктирные стрелки 510 показывают потоки рабочего тела по каналам движителя, а пунктирные стрелки 508 с ромбами - направление напора в соответствующих напорных устройствах.
Такой режим работы движителя обеспечивает, как неограничивающий пример, движение транспортной машины «боком».
На фиг. 6 показано, как неограничивающий пример, формирование тяги в направлении, указанном стрелкой 607. При этом четыре сопла 605 (второе сопло 605 не видно на фигуре), 606 работают на всасывание рабочего тела из окружающей среды, а сопла 601, 603 выбрасывают струи рабочего тела в направлении 602. Пунктирными стрелками 608 показаны пути (здесь очень короткие) рабочего тела по каналам движителя в этом режиме работы движителя, а пунктирные стрелки 609 с ромбами показывают, как и на других фигурах, направление напора, создаваемого напорными устройствами, расположенными в соответствующих каналах. Создаваемая каждым соплом тяга 604, суммируясь, создает суммарную тягу 607 движителя.
Такой режим работы движителя обеспечивает, как неограничивающий пример, движение транспортной машины «вниз».
На фиг. 7 показан, как неограничивающий пример, режим работы движителя, при котором формируется тяга в направлении, указанном стрелкой 703. При этом сопла 701, 702, 711 работают на всасывание рабочего тела из окружающей среды. Сопла 705, 707, 708 и 710 выбрасывают струи рабочего тела в направлениях, показанных стрелками 706, 709, 712, 713. Суммарная тяга в направлении, указанном стрелкой 703, обеспечивается при этом как векторная сумма сил тяги 704 четырех сопел 705, 707, 708, 710. Пунктирными стрелками показаны пути движения рабочего тела по каналам движителя на этом режиме работы движителя, а пунктирные стрелки с ромбами показывают направление напора соответствующих напорных устройств в каналах движителя.
Такой режим работы движителя обеспечивает, как неограничивающий пример, движение транспортной машины «вперед и вверх».
На фиг. 8 показан, как неограничивающий пример, режим работы движителя, обеспечивающий момент тяги (поворачивающее усилие), в направлении, показанном круговой стрелкой 801 (против часовой стрелки вокруг вертикальной оси движителя). Момент тяги при этом формируется суммарной тягой (короткие стрелки 802 и 806) двух пар сопел 804 и 805, выбрасывающих струи рабочего тела в направлениях, показанных длинными стрелками 803. При этом подразумевается, что показанные векторы тяги (пары стрелок 802 и 803) сопел параллельны в пространстве и равны между собой по величине, что обеспечивает нулевую суммарную силу тяги движителя при существенно ненулевом моменте тяги.
Такой режим работы движителя обеспечивает, как неограничивающий пример, разворот транспортной машины на месте.
На фиг. 9 показан, как неограничивающий пример, режим работы движителя, обеспечивающий момент тяги в направлении круговой стрелки 901 (вокруг продольной оси движителя) за счет работы двух сопел 908, выбрасывающих струи рабочего тела в направлениях, показанных стрелками 903 и 909, и создающих тягу 902 и 907. Два сопла 905 и 910 работают на всасывание, обеспечивая поступление рабочего тела из окружающей среды в движитель, как показывают стрелки 904. При этом подразумевается, что векторы тяги сопел параллельны в пространстве и равны между собой по величине, что обеспечивает нулевую суммарную тягу движителя и существенно ненулевой момент тяги. Пунктирные стрелки с ромбом 906 показывают направление работы напорных устройств активных каналов на этом режиме работы движителя. Остальные каналы, сопла и напорные устройства в показанном режиме не задействованы, движения рабочего тела по ним не происходит (нулевой поток).
Такой режим работы движителя обеспечивает, как неограничивающие примеры, крен транспортной машины на бок или компенсацию крена, вызванного внешним воздействием.
На фиг. 10 показан, как неограничивающий пример, более сложный режим работы движителя, когда обеспечивается одновременное формирование двух моментов тяги в направлениях, показанных круговыми стрелками 1003 и 1004.
На этой фигуре некоторые вектора (например, 1014, 1015) изображены так, чтобы наглядно показать их как векторную сумму. Это означает следующее. Расход (направление и величина расхода) рабочего тела из сопла 1012, показанные отдельными векторами 1014 и 1015, в реальности представляют собой (в режиме работы движителя, показанном на этой фигуре) общий, суммарный расход, величина и направление которого представлены векторной суммой векторов, двойной (суммарной) стрелкой «1014 + 1015». Каждый из этих частичных расходов создает соответствующую ему тягу. Это показано двумя векторами тяги (стрелки 1010 и 1011), которые также векторно суммируются, образую общую суммарную тягу сопла, показанную двойной стрелкой «1010 + 1011». Конечно, в реальности сопло выбрасывает одну (суммарную) струю и формирует одну (суммарную) тягу. Такое разложение суммарного расхода и соответствующей ему суммарной тяги одного сопла (1012) на составляющие приведено на фиг. 10 для того, чтобы наглядно показать и пояснить далее, как работа этого одного сопла (в описываемом режиме работы) обеспечивает одновременно (суммарно) формирование двух разных моментов тяги во взаимодействии с двумя другими соплами (1001 и 1005). При этом струя рабочего тела 1002 сопла 1001 формирует тягу 1009 этого сопла, а струя рабочего тела 1006 сопла 1005 формирует тягу 1013. Такое векторное представление является вполне строгим в математическом и физическом смыслах.
В рамках такого представления становится видно из фиг.10, что пара сил 1011 и 1009 (сопла, соответственно 1012 и 1001) создает момент сил, стремящийся повернуть движитель в направлении круговой стрелки 1003. Если указанная пара векторов сил параллельна друг другу, разнонаправлена и силы равны по величине, то суммарная тяга, ими образуемая, равна нулю, а суммарный момент сил имеет существенную величину. При этом, синхронное изменение величины этих сил (при неизменном направлении) обеспечивает регулирование величины создаваемого момента сил от нуля до некоторого максимума.
Тот же порядок работы применим к паре расходов 1015 и 1006 и соответствующей им паре сил 1010 и 1013, возникающих как реакция на выброс указанных расходов рабочего тела из сопел. Указанная пара сил при условии параллельности, разнонаправленности и равенства по величине также формирует существенный по величине момент тяги и не создает при этом суммарной тяги (их тяга взаимно компенсируется и равна нулю). Регулируя синхронно расходы 1015 и 1006, можно независимо менять величину момента тяги в направлении круговой стрелки 1004.
Поступление рабочего тела извне в движитель показывают тройные стрелки 1008 у соответствующих сопел 1007. Пути движения рабочего тела по каналам движителя в описываемом режиме показывают пунктирные стрелки 1016. Направление напора в напорных устройствах каналов показывают пунктирные стрелки 1017 с ромбами.
Такой режим работы движителя обеспечивает, как неограничивающий пример, одновременное противодействие крену и дифференту, вызванных внешним воздействием.
На фиг. 11 показан, как неограничивающий пример, режим работы движителя, который обеспечивает одновременно тягу в направлении, указанном стрелкой 1104, и момент тяги в направлении, указанном стрелкой 1105. Сопла 1101 обеспечивают поступление рабочего тела из внешней среды в движитель. Пунктирные стрелки 1103 показывают пути движения рабочего тела по каналам движителя, а пунктирные стрелки 1102 с ромбами показывают направление работы напорных устройств. Сопла 1107, 1110 и 1113 работают на выброс рабочего тела, формируют необходимые направления выброса струй 1108, 1111, 1114. Эти сопла формируют соответствующие усилия тяги 1106, 1109 и 1112. При этом, вектор усилия тяги 1104 движителя в целом является векторной суммой указанных векторов тяги сопел, а момент тяги движителя в целом (показан круговой стрелкой 1105) является суммой (векторной) моментов сил сопел (не показаны на рисунке).
В качестве неограничивающего примера применения такого режима работы движителя можно указать ситуацию вертикального взлета какого-либо воздушного транспортного средства, когда движитель обеспечивает одновременно набор высоты, набор скорости и разворот на заданный курс транспортной машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СТРУЙНЫЙ ДВИЖИТЕЛЬ С УПРАВЛЯЕМЫМ ВЕКТОРОМ ТЯГИ | 2010 |
|
RU2431583C1 |
| Способ вращения цилиндров, выполняющих роль крыльев на летательных аппаратах, и беспилотный летательный аппарат для его осуществления | 2024 |
|
RU2826746C1 |
| ГИДРОДИНАМИЧЕСКИЙ КАВИТАТОР | 2015 |
|
RU2588298C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО | 2012 |
|
RU2495795C1 |
| РЕАКТИВНЫЙ ДВИЖИТЕЛЬ, ТУРБИНА И ТУРБИНА ПАРОВАЯ НА ЕГО ОСНОВЕ | 2004 |
|
RU2276731C2 |
| ЛОДКА С ДВУМЯ ДВИЖИТЕЛЯМИ ДЛЯ ПОЛУЧЕНИЯ ВЫСОКОГО ДАВЛЕНИЯ ВОЗДУХА | 2023 |
|
RU2823963C1 |
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2531432C2 |
| ПАРОТУРБИННЫЙ ДВИГАТЕЛЬ | 1994 |
|
RU2086790C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ ПОТОКА ТЕКУЧЕЙ СРЕДЫ | 1995 |
|
RU2109171C1 |
| ЦЕНТРОБЕЖНЫЙ ДВИЖИТЕЛЬ | 2012 |
|
RU2500922C2 |



Движитель содержит восемь сопел, расположенных центрально-симметрично и соединенных между собой системой каналов, и напорные устройства в каналах для управления величиной и направлением напора в потоке рабочего тела в системе каналов. Сопла выполнены с возможностью управления направлением выброса струи рабочего тела во внешнюю среду и обеспечивают, как поступление рабочего тела из внешней среды в движитель, так и выброс рабочего тела из движителя во внешнюю среду. Система каналов движителя содержит в своем составе восемь активных каналов с напорными устройствами, четыре промежуточных канала и центральный канал. Каждый из этих восьми активных каналов с напорными устройствами присоединен одним концом к одному из сопел. Все активные каналы с напорными устройствами другими своими концами попарно соединены друг с другом, образуя четыре узла соединения активных каналов. К каждому из этих узлов соединения активных каналов присоединен одним своим концом один из четырех промежуточных каналов. Четыре промежуточных канала другими своими концами соединены попарно между собой, образуя два узла соединения промежуточных каналов, а центральный канал присоединен своими концами к двум узлам соединения промежуточных каналов. Уменьшаются потери энергии в потоках рабочего тела в проточных каналах движителя и увеличивается за счет этого его эффективности. 11 ил.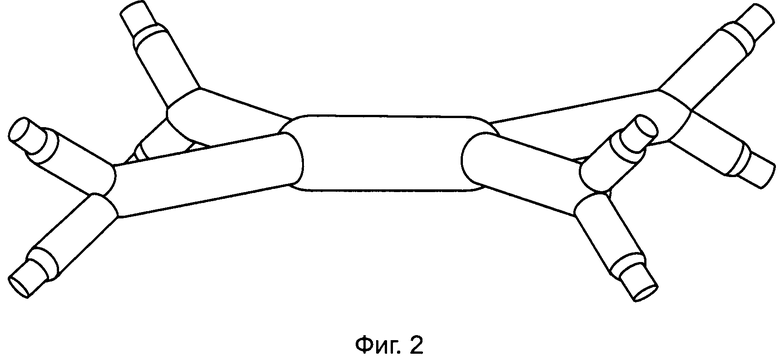
Струйный движитель, использующий в качестве рабочего тела газ или жидкость внешней среды, в которой он находится, содержащий восемь сопел, множество каналов, соединяющих сопла, и расположенные в каналах напорные устройства для управления величиной и направлением напора в потоке рабочего тела в канале, причем каждое из указанных сопел выполнено с возможностью управления направлением выброса струи рабочего тела и с возможностью обеспечить как поступление указанного рабочего тела из упомянутой внешней среды в движитель, так и выброс указанного рабочего тела из движителя в упомянутую внешнюю среду, отличающийся тем, что упомянутое множество каналов содержит восемь активных каналов, оснащенных упомянутыми напорными устройствами, четыре промежуточных канала и центральный канал, при этом каждый из восьми указанных активных каналов с напорными устройствами присоединен одним своим концом к одному из указанных сопел, все указанные активные каналы с напорными устройствами другими своими концами парами соединены друг с другом, образуя тем самым в местах упомянутых соединений четыре узла соединения активных каналов, к каждому из указанных узлов соединения активных каналов присоединен одним своим концом один из четырех указанных выше промежуточных каналов, четыре указанных промежуточных канала другими своими концами соединены парами между собой, образуя два узла соединения промежуточных каналов, и упомянутый центральный канал присоединен своими концами к упомянутым двум узлам соединения промежуточных каналов.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| CN 101177165 A, 14.05.2008. | |||

