Изобретение представляет собой устройство - движитель - и служит для создания управляемых усилий тяги и обеспечения перемещения транспортного средства или какого-либо иного объекта в трехмерной жидкой (например, в воде) или газовой (например, в воздухе) среде.
Аналогичными устройствами, широко известными из уровня техники, являются, например, водометные движители различных схем и компоновок (см., например, Куликов С.В., Храмкин М.Ф. Водометные движители. Теория и расчет. Л.: Судостроение. 1969 г.). Такого рода движители способны, в зависимости от их конкретной конструкции, обеспечить и управление вектором тяги, и управление моментом тяги (поворачивающим усилием) в том или ином диапазоне пространственных углов. Однако предлагаемый движитель отличается по своей конструкции (компоновкой узлов) от известных водометных движителей, обеспечивая эффективное пространственное управление вектором тяги и моментом тяги в диапазоне полного телесного угла.
Из уровня техники также известны турбореактивные двигатели (двигатели-движители) с отклоняемыми соплами (см., например, двигатель Rolls Royce Pegasus, http://www.rolls-royce.com/defence/products/combat_jets/pegasus.jsp), имеющие несколько проточных каналов, присоединенных к общей камере (компрессору турбореактивного двигателя); однако напорные устройства в таких двигателях - компрессоры, камеры сгорания не обеспечивают реверсивное управление потоком газа, что отличает их от заявляемого движителя. Конструкция двигателей (двигателей-движителей) типа Pegasus не обеспечивает пространственного управления вектором тяги и моментом тяги в диапазоне полного телесного угла.
Также из уровня техники известна струйная система управления самолетами вертикального взлета и посадки (см., в частности, http://kurs3.as-club.ru/aero/html/kurs_828_0.html), включающая в себя несколько удаленных от центра масс самолета на максимально возможное расстояние реактивных сопел, к которым с помощью трубопроводов подводится сжатый воздух от компрессора подъемно-маршевого двигателя. Конструкция системы позволяет управлять величиной и направлением тяги сопел, что, в совокупности, позволяет управлять суммарной тягой и моментом тяги системы в диапазоне пространственных углов, близком или совпадающим с полным телесным углом. Однако подобные системы не имеют в своем составе реверсивных напорных узлов в воздуховодах, что отличает их конструктивно от заявляемого движителя и является важным с точки зрения обеспечения эффективной работы устройства как движителя, а не как системы управления.
Задача, поставленная авторами при создании заявленного устройства, состоит в создании конструкции движителя, обеспечивающего управляемую по величине и направлению тягу в максимально широком диапазоне пространственных углов, вплоть до полного телесного угла, управляемый по величине и направлению в таком же диапазоне пространственных углов момент тяги (усилие поворота), независимо от пространственной ориентации самого движителя, при этом с достаточно высоким быстродействием управления и обеспечивающего достаточно высокую эффективность при работе. Техническим результатом при этом является создание движителя, обеспечивающего повышенную маневренность и повышенную эффективность при движении в трехмерной газовой или жидкой среде.
Для достижения требуемого результата предлагается конструкция струйного (реактивного) проточного движителя, использующего в качестве рабочего тела газ или жидкость окружающей среды, в которой он находится, состоящий из нескольких проточных каналов, служащих для движения рабочего тела, соединенных между собой посредством общей проточной камеры, оснащенных управляемыми реверсивными напорными устройствами и управляемыми соплами. Движитель содержит одну общую камеру, к которой присоединены и с ней одним своим концом сообщаются все проточные каналы движителя, при этом второй конец каждого проточного канала сообщается с окружающим пространством и представляет собой сопло или оснащен соплом. При этом количество проточных каналов равно четырем или более, каждое из управляемых реверсивных напорных устройств выполнено с возможностью независимого управления, а сопло каждого из проточных каналов служит для обеспечения управляемого пространственного отклонения выбрасываемой струи рабочего тела и его протока из внешней среды в движитель, и выполнено с возможностью независимого управления.
Конструктивное расположение каналов и сопел движителя в пространстве может быть различным в зависимости от конструктивных особенностей конкретного движителя и зависит, например, от количества каналов. При этом не любое компоновочное решение обеспечивает заявляемые свойства, однако на основании описанного принципа устройства движителя может быть предложен ряд компоновок, обеспечивающих пространственное управление тягой и моментом тяги в диапазоне полного телесного угла. Далее в описании и в графических материалах приведен пример одной из компоновок.
Заявленная конструкция движителя позволяет создавать управляемые усилия тяги и момента тяги (усилия поворота) в любом пространственном направлении (в полном телесном угле), что более подробно будет раскрыто ниже.
Заявленное решение иллюстрируется принципиальными конструктивными схемами (фиг.1 и 2), а также схемами, поясняющими примеры его работы (фиг.3-6).
Словарь использованных терминов:
«рабочее тело» - та часть газа или жидкости окружающей среды, которая находится во внутренних объемах движителя; для создания тяги и момента тяги используется реактивная сила, возникающая при выбрасывании этого рабочего тела из движителя во внешнюю среду;
«общая камера» - замкнутый объем, к которому присоединены одним своим концом все каналы; каналы открыты в камеру; камера сообщается с внешней средой только через каналы; технически центральная камера может не иметь собственных, явно выраженных конструктивных элементов, а являться просто общим внутренним объемом движителя в месте соединения (пересечения) каналов, соответственно, в данной заявке под термином «общая камера» следует понимать упомянутый общий объем в месте соединения каналов;
«проточный канал» - конструктивный объем, предназначенный для движения рабочего тела внутри него от общей камеры вовне и извне к общей камере; в каналах расположены напорные устройства; каналы движителя могут не иметь явно выраженных конструктивных элементов и выраженной длины и состоять, например, только из напорного узла с присоединенным соплом;
«напорный узел (напорное устройство)» - устройство, обеспечивающее управляемый по величине и направлению напор рабочего тела в канале и поток рабочего тела внутри канала в обоих направлениях, как от центральной камеры вовне, так и от внешней оконечности канала к центральной камере; напорное устройство каждого канала имеет возможность независимого управления; канал может содержать несколько напорных устройств, действующих согласованно, как один напорный узел, в этом случае под напорным узлом (устройством) следует понимать их совокупность;
«сопло» - здесь, представляет собой либо просто открытое внешнее окончание проточного канала движителя, либо так или иначе спрофилированное и технически обустроенное окончание проточного канала, либо устройство, расположенное на внешнем окончании канала, обеспечивающее формирование струи или нескольких струй рабочего тела и управление направлением выброса этой струи (струй) в необходимом направлении; конструктивно сопло может представлять собой несколько устройств, работающих во взаимодействии, например неподвижное сопло и отдельное дефлекторное устройство, отклоняющее выбрасываемую струю; в этом случае под соплом подразумевается вся совокупность устройств; при работе канала на всасывание, то есть при движении рабочего тела в канале в направлении от внешней оконечности к общей камере, сопла обеспечивают проток рабочего тела из внешней среды в движитель (т.е. не препятствуют такому протоку);
«силовые приводы движителя» - совокупность технических средств, обеспечивающих подвод энергии к исполнительным механизмам движителя - напорным узлам, соплам и другим механизмам - для обеспечения их работы; обычно представляют собой совокупность двигательных установок и трансмиссий;
«условный вектор момента тяги» - математическое (физическое) понятие, вектор, «длина» которого характеризует величину момента силы, а его пространственное направление характеризует, в каком направлении к объекту приложен совокупный момент сил (по «правилу буравчика»);
«общая эффективность движителя» - общая совокупность свойств и технических характеристик, показывающая хозяйственную полезность движителя; сюда можно отнести совокупно обеспечиваемые тягу, скорость, топливную эффективность, маневренность, надежность, удобство эксплуатации, безопасность и ряд других параметров.
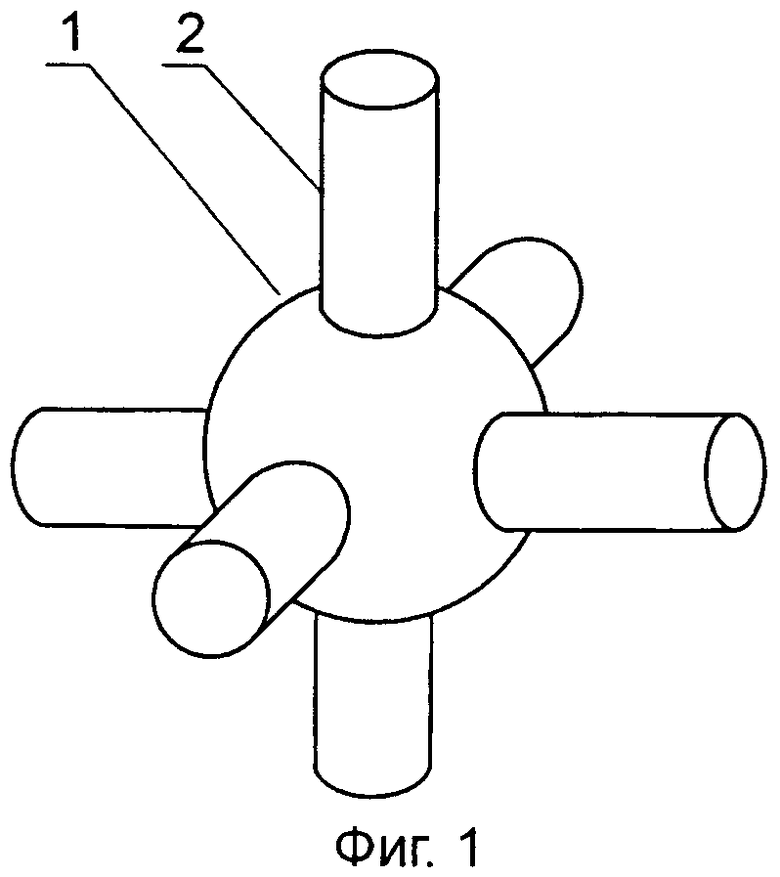
Конструктивно заявленный движитель состоит из общей (центральной) камеры 1 (см. фиг.1), к которой подсоединены несколько (четыре или более) проточных каналов 2. Каждый из каналов сообщается с центральной камерой одной из оконечностей, а другой оконечностью - с трехмерной газовой или жидкой средой (т.е. с окружающим пространством), в которой находится транспортное средство. Центральная камера сообщается с окружающим пространством исключительно посредством каналов. Для специалиста в рассматриваемой области техники очевидно, что движение рабочего тела в каналах движителя обеспечивается за счет работы напорных узлов, расположенных в каждом из каналов. Напорные узлы обеспечивают управляемый напор и проток рабочего тела внутри каналов, как по направлению к общей камере устройства, так и от нее. Сопла на внешних окончаниях каналов обеспечивают управление направлением выброса рабочего тела. Характер движения рабочего тела через все сопла, каналы и общую камеру движителя обусловлен, в каждый момент времени, общей работой всех напорных устройств движителя, так как между всеми каналами имеется гидродинамическая связь через общую камеру.
Конструктивное расположение сопел движителя в пространстве может быть различным в зависимости как от конкретных конструктивных особенностей движителя, например, от количества каналов, так и от предназначения движителя и потребностей того или иного транспортного средства, в составе которого использован заявленный движитель. При этом предпочтительным, с точки зрения оптимизации работы, но не обязательным является вариант с расположением сопел в вершинах воображаемого выпуклого центрально-симметричного многогранника, описанного вокруг движителя или варианты расположения, близкие к такому.
На фиг.2 схематично показан в разрезе тот же вариант компоновки движителя, что на фиг.1, включающий общую камеру 1, проточные каналы 2, управляемые сопла 3, размещенные в каналах напорные устройства 4. Для определенности и наглядности напорные узлы изображены в виде гребных винтов (здесь подразумевается возможность реверсивной работы гребных винтов), при этом гребной винт 5 расположен в канале, перпендикулярном плоскости рисунка. Сопла, также для наглядности, условно показаны как устройства, отклоняющие струю рабочего тела только в плоскости рисунка, хотя все приведенные далее рассуждения верны и для случая, когда сопла обеспечивают пространственное отклонение выбрасываемой струи. Поз.6 показывает, как вариант, границы отклонения струи управляемого сопла.
Заявленный движитель работает следующим образом: в основном рабочем режиме один или несколько каналов засасывают газ или жидкость из окружающей среды для использования в качестве рабочего тела, при этом напорные узлы этих каналов работают на всасывание. Одновременно с этим напорные узлы остальных каналов работают на выброс рабочего тела в окружающую среду, а сопла таких каналов формируют направление выброса струй. При этом скорость выброса струй из сопла зависит как от работы напорного узла соответствующего канала, так и от работы напорных узлов всех других каналов, как всасывающих, так и выбрасывающих, так как все каналы гидродинамически связаны через общую камеру. При выбросе струй рабочего тела возникают реактивные силы. Величина реактивной силы связана со скоростью реактивной струи и зависит от работы напорных устройств каналов. Моменты реактивных сил (поворачивающие усилия) управляются и отклонением струй соплами, и работой напорных устройств. Суммарно, все возникшие реактивные силы определяют направление и величину суммарной тяги движителя и направление и величину суммарного момента тяги (поворачивающего усилия).
Управляя величиной и направлением напора напорных узлов каналов и при выполнении условия, что в любой момент времени какие-то из каналов работают на всасывание, а какие-то на выброс рабочего тела, а также управляя направлением выброса струй с помощью управляемых сопел, можно получить суммарную тягу движителя и суммарный момент тяги движителя, любые по величине и направлению в пространстве (в полном телесном угле), независимо от ориентации в пространстве самого движителя.
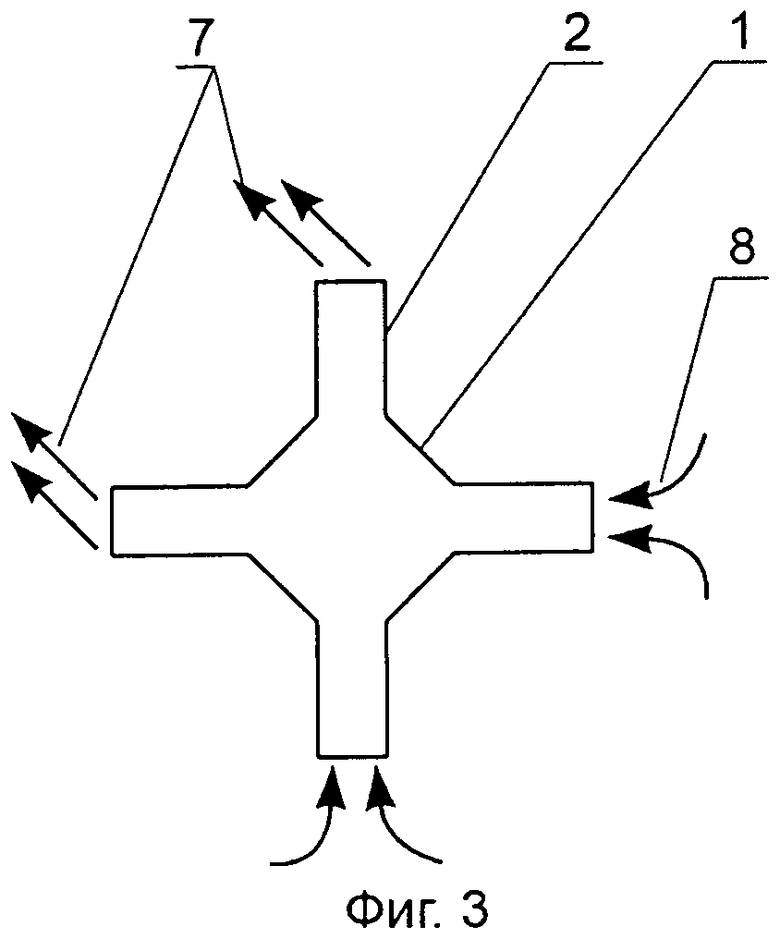
Эскизы на фиг.3-6 упрощенно показывают примеры работы движителя с компоновкой в соответствии с фиг.1. Для наглядности, на фиг.3-6 каналы, расположенные перпендикулярно плоскости чертежа, рассматриваются как работающие только на всасывание при всех рассмотренных режимах движителя и на чертеже их изображение не приводится.
На фиг.3 схематично изображен движитель в той же компоновке, что на фиг.1 и 2. На фиг.3 поз.1 - общая камера, поз.2 - проточные каналы. Поз.7 на фиг.3 (аналогично и на следующих чертежах) стрелками, направленными из канала, показывает направление струй рабочего тела при выбросе из движителя. При выбросе этих струй возникают реактивные силы, обеспечивающие тягу и момент тяги движителя. Изогнутые стрелки 8 на фиг.3 (аналогично и на следующих чертежах), направленные внутрь каналов, иллюстрируют всасывание рабочего тела из окружающей среды в движитель. Для наглядности чертежей рассматривается вариант, при котором центр масс движителя совпадает с центром его симметрии. Работа движителя показана вне транспортного средства для большей наглядности; движитель, установленный на транспортном средстве, работает так же.
В примере, приведенном на фиг.3, движитель выбрасывает струи рабочего тела из «верхнего» (условно, по рисунку и здесь, и далее в тексте) и «левого» каналов в направлении «влево-вверх» и всасывает рабочее тело из окружающей среды через «правый» и «нижний» каналы. Реактивные силы, возникающие при таком выбросе струй, создают суммарно тягу движителя «вниз и вправо» и не создают момента тяги, так как моменты тяги двух каналов взаимно уравновешиваются, а усилия тяги суммируются.
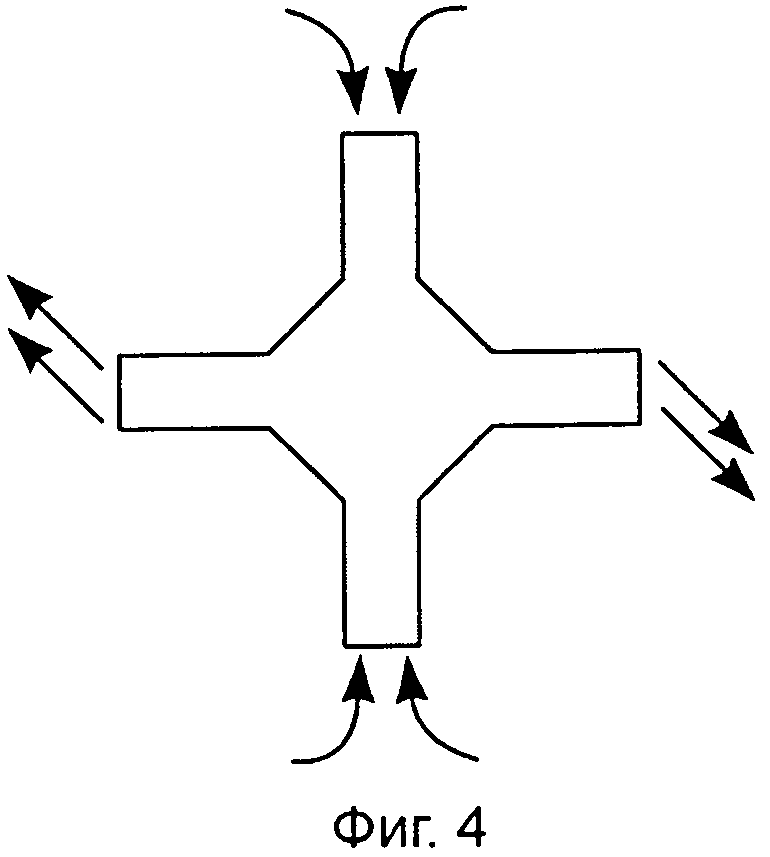
На примере согласно фиг.4, выброс струй из «левого» и «правого» каналов в указанных стрелками направлениях обеспечивают момент тяги движителя «против часовой стрелки» и нулевую суммарную тягу, так как усилия тяги в таком режиме взаимно уравновешиваются, а моменты тяги суммируются. Всасывание рабочего тела из окружающей среды обеспечивается через «верхний» и «нижний» каналы.
Режим работы движителя согласно фиг.5 обеспечивает одновременно тягу приблизительно «вниз-вниз-вправо» за счет суммирования тяги «верхнего» и, частично, «левого» каналов и момент тяги «против часовой стрелки» за счет «левого» канала. Всасывание рабочего тела происходит через «нижний» и «правый» каналы.
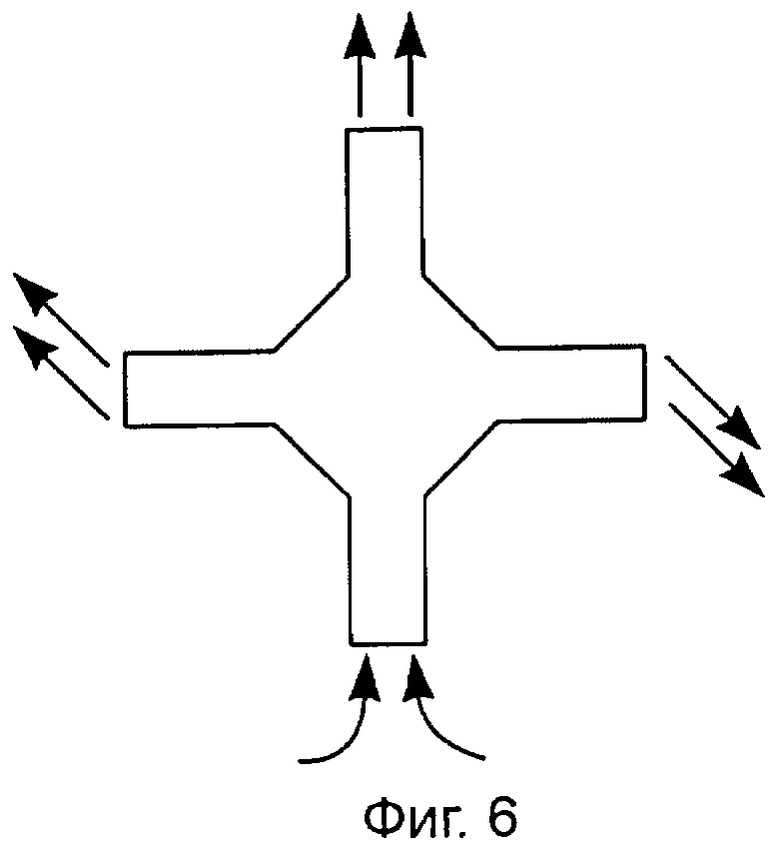
Режим работы движителя согласно фиг.6 обеспечивает одновременно тягу, в направлении по рисунку «вниз» и момент тяги «против часовой стрелки». В рассматриваемом варианте тягу «вниз» создает струя из «верхнего» канала, так как усилия тяги «левого» и «правого» сопел взаимно уравновешиваются. Момент тяги «против часовой стрелки» создают сопла «левого» и «правого» каналов. Всасывание рабочего тела происходит через «нижний» канал.
Конструкция заявляемого устройства предполагает очевидные для специалиста взаимозависимости и ограничения следующего толка. Максимум тяги и максимум момента тяги определяются конструкцией конкретного движителя и ограничены мощностью силовых приводов. Максимальные усилия тяги движитель обеспечивает при нулевом моменте тяги, а максимальные моменты тяги - при нулевом усилии тяги, так как эти параметры обеспечиваются одними и теми же исполнительными механизмами - напорными узлами каналов и соплами - и используют один и тот же источник энергии - силовые приводы движителя.
Вариантом заявляемой конструкции является то же устройство, но с неподвижными соплами. При этом может быть предложен ряд таких компоновок движителя, когда расположение и конфигурация неподвижных (фиксированных) сопел движителя, обеспечивает управление тягой и моментом тяги в широком диапазоне пространственных углов, вплоть до полного телесного угла. Такой вариант движителя имеет значительно более простую конструкцию, однако обеспечивает при этом гораздо меньшую энергетическую (топливную) эффективность.
Другим очевидным вариантом является движитель, у которого некоторые сопла управляемы, а некоторые фиксированы.
Подытоживая. Заявленный струйный движитель обеспечивает одновременно управление величиной и пространственным направлением усилия тяги в диапазоне полного телесного угла и управление величиной и направлением условного вектора момента тяги в диапазоне полного телесного угла.
Заявленный струйный движитель предназначен для применения на транспортных средствах или других устройствах, перемещающихся в трехмерной газовой или жидкой среде, например в воздухе или в воде, и обеспечивает тягу и момент тяги. Движитель обеспечивает одновременное и независимое управление усилием тяги и моментом тяги, как по величине, так и по направлению. При этом пространственное управление вектором тяги и условным вектором момента тяги обеспечивается в пространственном диапазоне полного телесного угла и не зависит от пространственного положения самого движителя. Такой движитель, при движении в трехмерной газовой или жидкой среде, обеспечивает повышенный уровень маневренности при высоком общем уровне эффективности.

Изобретение относится к судостроению и авиации и касается создания струйных движителей. Струйный движитель использует в качестве рабочего тела газ или жидкость окружающей среды, в которой он находится. Он состоит из нескольких проточных каналов для движения через них рабочего тела, соединенных между собой посредством одной общей проточной камеры и оснащенных управляемыми реверсивными напорными устройствами, обеспечивающими управляемый напор в потоке рабочего тела, как в направлении общей камеры, так и в обратном направлении, и управление величиной этого напора. Второй конец каждого проточного канала сообщен с окружающим пространством и оснащен управляемым соплом, обеспечивающим отклонение выбрасываемой струи рабочего тела. К одной общей камере одним своим концом присоединены и сообщены с ней все проточные каналы движителя. Общая камера сообщена с окружающей средой только через эти каналы. Напорными реверсивными устройствами с независимым управлением оснащены все каналы. Управляемыми соплами с независимым управлением оснащены все каналы. Каждое сопло обеспечивает пространственное, в телесном угле, отклонение выбрасываемой струи, а также обеспечивает проток рабочего тела из окружающей среды в движитель. Общее количество таких проточных каналов в движителе составляет не менее четырех. Изобретение позволяет обеспечить повышенные маневренность и эффективность при движении в трехмерной среде. 6 ил.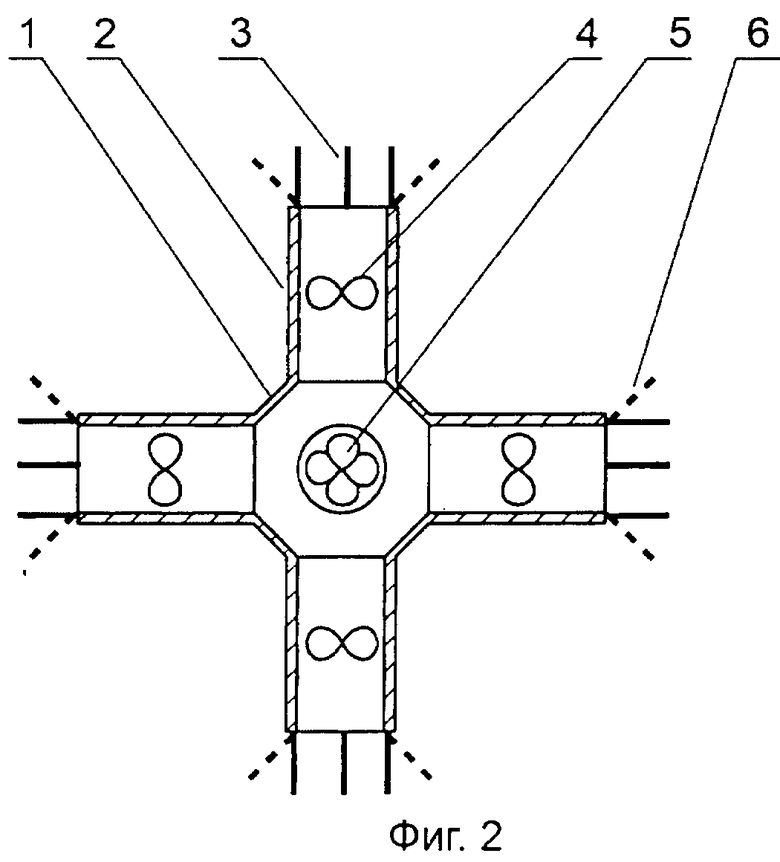
Струйный движитель, использующий в качестве рабочего тела газ или жидкость окружающей среды, в которой он находится, состоящий из нескольких проточных каналов, служащих для движения через них рабочего тела, соединенных между собой посредством одной общей проточной камеры и оснащенных управляемыми реверсивными напорными устройствами, обеспечивающими управляемый напор в потоке рабочего тела как в направлении общей камеры, так и в обратном направлении, и управление величиной этого напора, причем второй конец каждого проточного канала сообщается с окружающим пространством и оснащен управляемым соплом, обеспечивающим отклонение выбрасываемой струи рабочего тела, отличающийся тем, что к одной общей камере одним своим концом присоединены и сообщаются с ней все проточные каналы движителя, при этом общая камера сообщается с окружающей средой только через эти каналы, напорными реверсивными устройствами с независимым управлением оснащены все каналы, управляемыми соплами с независимым управлением оснащены все каналы, причем каждое сопло обеспечивает пространственное, в телесном угле, отклонение выбрасываемой струи, а также обеспечивает проток рабочего тела из окружающей среды в движитель, при этом общее количество таких проточных каналов в движителе составляет не менее четырех.
| US 3599899 A, 17.08.1971 | |||
| US 5456425 A, 10.10.1995 | |||
| РАКЕТА | 1998 |
|
RU2138766C1 |
| US 6849247 B1, 01.02.2005 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

