Изобретение относится к области устройств для измерения пройденного наземным колесным транспортным средством пути, в частности, к механическим измерителям пути, и может быть применено в одометрических системах наземной навигации.
Известные механические измерители пути представляют собой механические датчики пути, построенные либо на основе контактно-коллекторного датчика, связанного с валом колеса транспортного средства, либо многополюсного индукционного (индуктивного) датчика типа «синусно-косинусный вращающийся трансформатор», ротор которого также связан с валом колеса транспортного средства (см., например, А.П. Попов. «Теория навигации. Часть 1». М., «Военное издательство», 1982 г., стр. 82). Выходной сигнал механического датчика пути, который содержит информацию о длине пройденного отрезка пути и поступает на вход вычислительного устройства, зависит от радиуса качения колеса и количества его оборотов. Параметры указанной зависимости определяются (уточняются) посредством периодической калибровки механического датчика пути на специально оборудованном мерном участке дороги. При этом точность измерения с помощью таких устройств информации о пройденном транспортным средством пути в значительной мере определяется степенью постоянства радиуса качения колеса.
Цель настоящего изобретения - повышение точности измерения пройденного наземным транспортным средством пути за счет исключения погрешности, обусловленной изменением радиуса качения колеса вследствие изменения давления воздуха в шине.
Указанная цель достигается тем, что в предлагаемом устройстве в отличие от прототипа дополнительно введен датчик давления воздуха в шине, закрепленный на колесном диске, выходной сигнал которого по радиоканалу связи поступает в блок приема и преобразования сигнала, выход блока приема и преобразования сигнала соединен со входом вычислительного устройства.
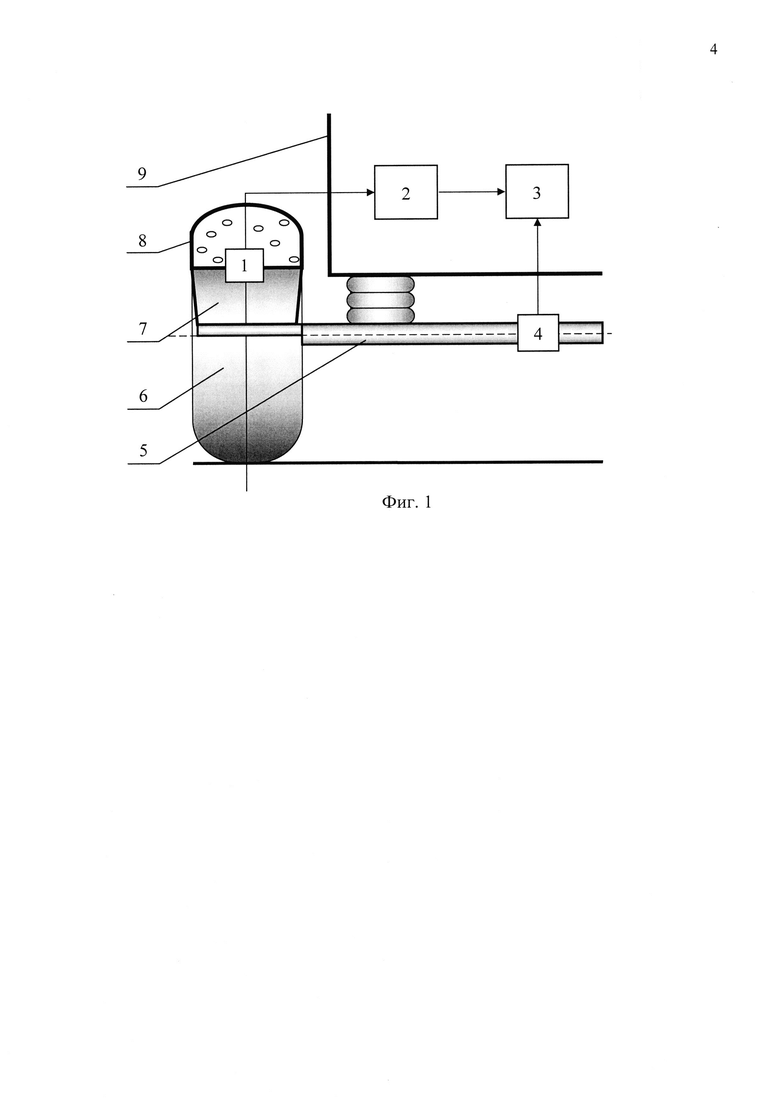
Сущность изобретения поясняется чертежом (рис. 1), где показан механический измеритель пути. Устройство включает в себя датчик давления воздуха 1 в шине 8, закрепленный на колесном диске 7 транспортного средства 9. Выход датчика давления воздуха в шине с помощью радиоканала соединен со входом блока приема и преобразования сигнала 2, выход которого соединен с первым входом вычислительного устройства 3. Со вторым входом вычислительного устройства соединен выход механического датчика пути, связанного с валом 5 колеса 6 транспортного средства.
Устройство работает следующим образом. Во время движения колесного транспортного средства по местности на выходе датчика 1 будет присутствовать сигнал, пропорциональный величине Рi. давления воздуха в шине 8 колеса 6. Сигнал Рi по радиоканалу подается на вход блока приема и преобразования сигнала 2, в котором он преобразуется из аналоговой в цифровую форму. Преобразованный в цифровую форму сигнал Рi далее поступает на первый вход вычислительного устройства 3. На второй вход вычислительного устройства подается сигнал с выхода механического датчика пути 4, который содержит информацию Si, о длине i-го отрезка пути, пройденного транспортным средством.
В вычислительном устройстве 3 рассчитывается пройденный за все время движения транспортного средства путь S. Вычисления осуществляются по следующим формулам:
 , Ri=kPi,
, Ri=kPi,
где Ri - радиус качения колеса на i-ом отрезке пути;
Ni - количество оборотов колеса на i-ом отрезке пути;
k - коэффициент преобразования.
Значение коэффициента преобразования k получают в ходе калибровки механического датчика пути экспериментальным путем на основе анализа зависимости радиуса колеса от величины давления воздуха в его шине.
Таким образом, в предложенном механическом измерителе пути обеспечивается компенсация погрешности измерения пройденного пути наземным транспортным средством, обусловленной изменением радиуса качения колеса вследствие изменения давления воздуха в шине, и тем самым, повышается точность измерения пройденного пути.
Аналоги:
- Псарев А.А. и др. «Военная топография». М.: «Военное издательство», 1986 г., стр. 269;
- Попов А.П. «Теория навигации. Часть 1». М., «Военное издательство», 1982 г., стр. 82 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| ОДОМЕТРИЧЕСКАЯ СИСТЕМА НАВИГАЦИИ | 2016 |
|
RU2664978C2 |
| Способ автономного определения скорости движения наземного транспортного средства | 2016 |
|
RU2624335C1 |
| Аппарат на воздушной подушке с наземным движителем | 2015 |
|
RU2614459C1 |
| Система определения скорости локомотива и направления движения | 2023 |
|
RU2808860C1 |
| СПОСОБ КОНТРОЛЯ ПОПЕРЕЧНОГО ПРОФИЛЯ И РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ВАГОН-ПУТЕИЗМЕРИТЕЛЬ | 2010 |
|
RU2418705C1 |
| Измеритель скорости локомотива | 2022 |
|
RU2793551C1 |
| Система определения скорости локомотива | 2023 |
|
RU2809393C1 |
| СПОСОБ РЕГИСТРАЦИИ СКОРОСТИ ДЛЯ ТАХОГРАФИЧЕСКОЙ СИСТЕМЫ | 2007 |
|
RU2440617C2 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ АВТОМОБИЛЯ ПО БАРАБАНАМ СТЕНДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431848C1 |
Изобретение относится к области устройств для измерения пройденного наземным колесным транспортным средством пути, в частности к механическим измерителям пути, и может быть применено в одометрических системах наземной навигации. Механический измеритель пути отличается от аналогов датчиком давления в шине, выходной сигнал которого передается по радиоканалу в блок приема и преобразования сигнала. Благодаря этому при движении многоосного транспортного средства по местности обеспечивается учет погрешности измерения пройденного пути, вызванной различным давлением в шинах транспортного средства. Технический результат - повышение точности измерения пройденного наземным транспортным средством пути за счет исключения погрешности, обусловленной изменением радиуса качения колеса вследствие изменения давления воздуха в шине. 1 ил.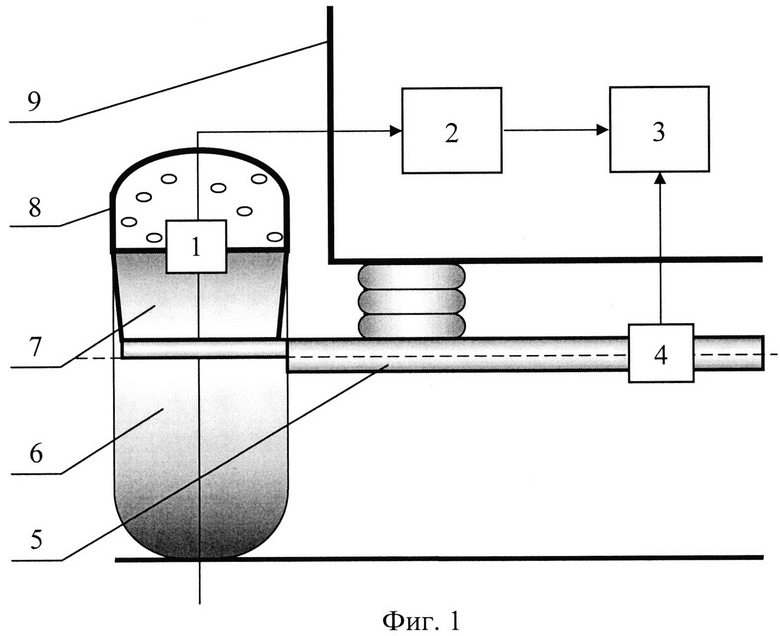
Механический измеритель пути, содержащий механический датчик пути и вычислительное устройство, отличающийся тем, что с целью повышения точности измерения пройденного наземным транспортным средством пути за счет исключения погрешности, обусловленной изменением радиуса качения колеса вследствие изменения давления воздуха в шине, дополнительно введен датчик давления воздуха в шине, закрепленный на колесном диске, выходной сигнал которого по радиоканалу связи поступает в блок приема и преобразования сигнала, выход блока приема и преобразования сигнала соединен с входом вычислительного устройства.
| "ТЕОРИЯ НАВИГАЦИИ | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ПОПОВ А.П., М.: "ВОЕНИЗДАТ", 1982, 196 СТР | |||
| МАЛОГАБАРИТНОЕ УСТРОЙСТВО ИНДИКАЦИИ ДАВЛЕНИЯ | 1992 |
|
RU2051331C1 |
| US 6313742 B1, 06.11.2001 | |||
| WO 2001086308 A1, 15.11.2001. | |||

