Изобретение относится к способу регистрации и записи по меньшей мере скорости в качестве релевантной для регистрации информации для тахографической системы, при котором в вычислительном блоке для определения скорости регистрируются сигналы по меньшей мере двух независимых датчиков и за счет сравнения проверяется их достоверность, а в случае значительно отличающихся сигналов, записывается относящееся к соответствующему датчику сообщение об ошибке. Изобретение относится также к такой тахографической системе.
Тахографические системы используются в транспортных средствах, например, в грузовых автомобилях или автобусах, для регистрации и записи определенной информации с целью выполнения предписанной законодательством обязанности записи так называемой релевантной для регистрации информации у определенных типов транспортных средств при их определенной эксплуатации. Кроме того, тахографические системы служат для контроля за соблюдением предписанной законодательством продолжительности рейсов или отдыха водителей, а также для контроля ограничений скорости. Тахографические системы или тахографы состоят, в общем, из регистрирующего блока и датчика для определения скорости, который называется также датчиком скорости. Известные из более старых тахографов бумажные диски, на которые наносилась скорость, заменены в современных тахографах, так называемых цифровых тахографах, памятью в виде чип-карты. В цифровых тахографах датчик скорости вырабатывает данные, из которых в регистрирующем блоке вычисляются все релевантные для регистрации данные, например скорость, пройденный путь и так далее, и сохраняются на чип-карте. При этом датчик скорости помимо датчика регистрации времени является единственным источником данных для расчета скорости в качестве релевантной для регистрации или обязательной для записи информации. Во избежание манипуляций с тахографической системой датчик скорости опломбирован с коробкой передач. Дополнительно связь между датчиком скорости и регистрирующим блоком осуществляется через стандартный протокол, имеющий соответствующий шифр. Однако оказалось, что в случае, когда, несмотря на меры безопасности, производятся манипуляции с датчиком скорости, манипуляции с системой не обнаруживаются, так что происходит регистрация фальшивых данных. Кроме того, при выходе из строя датчика скорости больше невозможна запись релевантных для регистрации данных.
Из DE 19615248 А1 известен способ определения скорости транспортного средства, при котором скорость определяется по числу оборотов колеса. Для удовлетворения законодательных требований, за счет поправочного значения должно гарантироваться, чтобы скорость транспортного средства ни в коем случае не была ниже фактической скорости. Поправочное значение получают за счет регистрации данных о местоположении и вычисленной по ним скорости. Вследствие этого необходимо учитывать, например, износ профиля шин или состояние загрузки и давление в шинах.
Далее, в DE 10015304 А1 описана навигационная система, у которой в навигаторе регистрируются различные параметры движения, такие как скорость, вращательное ускорение, линейное ускорение, аварийные индикаторы и так далее, которые сохраняются на чип-карте. Меры по защите от манипуляций или по обнаружению дефектного датчика не предусмотрены. Навигационная система является лишь типом тахографа, расширенного за счет функции аварийного самописца, известного также под названием «черный ящик», который записывает данные о движении в последние минуты или секунды перед аварией, чтобы можно было выяснить ее причины.
В US 2003/088348 А1 и ЕР 0638877 предложены способы описанного выше вида.
В DE 10210320 А1 раскрыт контроль времени движения грузовых автомобилей за счет двойной записи.
Задача изобретения состоит в создании способа, который обеспечивал бы максимальную защиту от манипуляций с тахографической системой.
Согласно изобретению, эта задача решается способом описанного выше вида, при котором одному датчику присваивают функцию ведущего датчика и с помощью сигналов других датчиков проверяют его подлинность, причем в случае сигналов, подаваемых множеством датчиков и отличающихся друг от друга только в определенном диапазоне предельных значений, значительно отличающийся от них сигнал ведущего датчика характеризуют как ложный, скорость определяют только с помощью сигналов других датчиков, установленных как достоверные, и в памяти сохраняется сообщение об ошибке.
Преимущество предложенного способа состоит в том, что за счет запросов записанных сообщений об ошибках можно обнаружить выход из строя датчика или манипуляции с ним. Это может использоваться как в целях обслуживания, так и для выборочной полицейской проверки, то есть благодаря хранению в памяти сообщения об ошибке можно проверить, является ли записанная скорость правильной или ложной. Запись скорости происходит только в случае исправных датчиков, с которыми не производилось никаких манипуляций. Поскольку при расчете или регистрации релевантной для регистрации или обязательной для записи информации в распоряжении имеются несколько источников данных, а выход из строя датчика или манипуляции с ним обнаруживаются, можно тем не менее определить записываемую скорость. За счет того, что датчику присвоена функция ведущего датчика, и с помощью сигналов по меньшей мере двух других датчиков проверяется его подлинность, можно обнаружить ошибку или манипуляции с ведущим датчиком. За счет определения значительно отличающегося сигнала ведущего датчика можно, несмотря на ошибку или манипуляции с ведущим датчиком, зарегистрировать и сохранить релевантную для регистрации информацию. Установление того, сколько датчиков образуют необходимое множество, зависит от числа датчиков. Если речь идет, например, о трех датчиках, два из которых подают сигналы, отличающиеся друг от друга только в определенном диапазоне предельных значений, значительно отличающийся сигнал ведущего датчика можно обнаружить за счет двух сигналов обоих других датчиков. Для как можно более надежного определения скорости при большем числе датчиков устанавливается, что также соответственно больше датчиков должны подавать сигналы, отличающиеся друг от друга только в определенном диапазоне предельных значений.
В одном предпочтительном варианте данные передают между по меньшей мере одним датчиком и вычислительным блоком в зашифрованном виде для дополнительной защиты процесса от манипуляций.
Объектом изобретения является также тахографическая система для регистрации релевантных данных о транспортном средстве, содержащая по меньшей мере три датчика для регистрации скорости транспортного средства, связанный с датчиками вычислительный блок для сравнения сигналов и исключения ошибочных сигналов, а также память для хранения по меньшей мере скорости в качестве релевантной для регистрации информации, причем по меньшей мере один из датчиков является измерителем числа оборотов, расположенным на стороне привода коробки передач и служащим в качестве датчика для регистрации скорости. При сравнении сигналов измерителю числа оборотов присвоена функция ведущего датчика, причем посредством других датчиков проверяют достоверность сигнала измерителя числа оборотов, посредством вычислительного блока исключают ошибочные сигналы, а скорость определяют только с помощью тех подаваемых датчиками сигналов, которые отличаются друг от друга только в определенном диапазоне предельных значений. Измеритель числа оборотов представляет собой так называемый датчик скорости, обычно используемый в тахографах. Три датчика с целью повышения надежности системы позволяют определить ошибочный сигнал или сигнал, с которым производились манипуляции.
В одном предпочтительном варианте по меньшей мере один из датчиков является позиционным датчиком, регистрирующим позиционные данные транспортного средства, причем скорость определяется с помощью сигналов позиционного датчика. В качестве позиционного датчика может использоваться приемник глобальной системы позиционирования (GPS-приемник), встроенный в вычислительный блок. GPS-приемник с помощью сигналов спутников определяет позиционные данные транспортного средства, по которым вычисляют фактически пройденный путь и вместе с зарегистрированным для этого пройденного пути временем вычисляют скорость на этом пройденном пути. Поскольку навигационные системы часто уже установлены в современных транспортных средствах, в качестве позиционного датчика может использоваться также GPS-приемник навигационной системы. Точно также можно использовать в качестве позиционного датчика GPS-приемник блока управления для так называемого слежения, которое служит для передачи в диспетчерскую подтверждения о текущем местоположении транспортного средства. Определение позиционных данных возможно также с помощью стационарных ответчиков и/или датчиков. Это может происходить, например, с помощью устройств регистрации уплаты дорожного сбора, которые предоставляют водителю проезжающего мимо транспортного средства позиционные данные.
Предпочтительно, по меньшей мере один из датчиков является колесным датчиком антиблокировочной системы (ABS) для определения числа оборотов колеса, с помощью которого определяется скорость. Поскольку ABS-системы входят в стандартное оборудование современных транспортных средств, можно прибегнуть к ним для поддержания затрат на тахографическую систему на минимальном уровне. Поскольку, например, в случае малых радиусов поворота или проскальзывания ведущего колеса возникают отклонения чисел оборотов различных колес, можно из установленных на различных колесах одной оси датчиков ABS получить среднее значение. Корректировка значений колесных датчиков может осуществляться также с помощью датчика поворота рулевого колеса, который уже имеется в электронных программах поддержания устойчивости. В этом случае все датчики могут использоваться независимо друг от друга, что дополнительно повышает защиту от манипуляций.
Кроме того, предпочтителен вариант выполнения, в котором по меньшей мере один из датчиков является измерителем числа оборотов для регистрации числа оборотов двигателя и вместе с датчиком регистрации включенной передачи служит для регистрации скорости. Поскольку регистрация числа оборотов двигателя выполняется в любом случае, в распоряжении имеется дополнительный недорогой датчик.
Из перечисления различных датчиков видно, что определение достоверности скорости, зарегистрированной тахографической системой, происходит предпочтительно с помощью уже установленных в транспортном средстве датчиков. Чем больше число независимых сигналов, тем выше уровень защиты системы от манипуляций или дефектных датчиков. Поскольку в случае большого числа дополнительных датчиков манипуляции успешны только в случае, когда они производятся одинаковым образом со всеми датчиками, так называемый датчик скорости может быть выполнен проще, то есть без высокого уровня защиты от манипуляций, такой, как, например, опломбировывание или зашифрованная передача данных, если это законодательно разрешено.
Ниже изобретение пояснено более подробно на примере его осуществления с помощью сопровождающих чертежей, на которых изображено:
фиг.1 - схема тахографической системы с регистрирующим блоком и тремя независимыми датчиками;
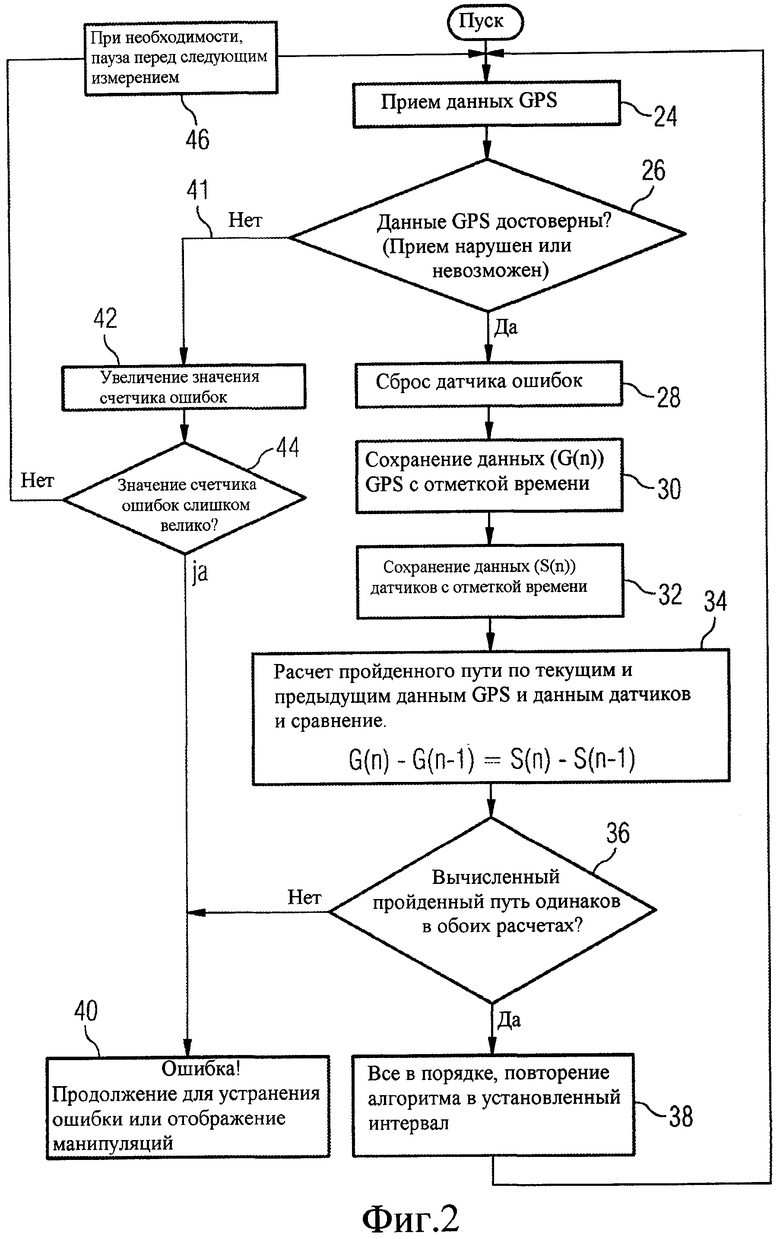
фиг.2 - пример фрагмента процесса проверки достоверности с использованием данных глобальной системы позиционирования (GPS).
На фиг.1 схематично изображена конструкция предложенной тахографической системы. В регистрирующем блоке 12 расположен вычислительный блок. Регистрирующий блок 12 связан по меньшей мере с тремя независимыми датчиками 14, 16, 18 для регистрации скорости транспортного средства. Первый датчик 14 представляет собой так называемый датчик скорости, который в виде измерителя числа оборотов расположен на стороне привода коробки передач транспортного средства. Второй датчик 16 представляет собой позиционный датчик, который с помощью GPS-сигналов регистрирует данные о местоположении транспортного средства, посредством которых определяется его скорость. Третий датчик 18 представляет собой колесный датчик ABC для определения числа оборотов колеса, с помощью которого определяется скорость.
Регистрирующий блок 12 имеет дисплей 20 и устройства 22 записи/считывания для ввода чип-карт для сохранения релевантной для регистрации информации.
В вычислительном блоке регистрирующего блока 12 регистрируются сигналы датчиков 14, 16, 18. Сигналы сравниваются между собой, и их достоверность проверяется за счет того, что из множества сигналов исключаются значительно отличающиеся сигналы, и записываемая скорость транспортного средства определяется только с помощью тех сигналов, которые отличаются друг от друга только в определенном диапазоне предельных значений. В зависимости от выработанных датчиками 14, 16, 18 сигналов может потребоваться обработка сигналов, чтобы их можно было сравнивать. Это, например, тот случай, когда один датчик подает сигнал напряжения, а другой вырабатывает импульсный сигнал. Разумеется, можно также вычислить с помощью различных сигналов, соответственно, скорость транспортного средства и сравнить скорости между собой. Определение предельных значений может происходить как абсолютно, так и относительно, в зависимости от скорости транспортного средства.
Если все три сигнала отличаются друг от друга только в определенном диапазоне предельных значений, то можно исходить из того, что с датчиками 14, 16, 18 не производилось никаких манипуляций и они не имеют дефекта. Для определения записываемой скорости можно привлечь соответственно все три сигнала датчиков 14, 16, 18 или сигнал предпочитаемого датчика.
Если один из сигналов значительно отличается от других сигналов, то это указывает на то, что датчик 14, 16, 18 является дефективным или на то, что с датчиком производились манипуляции. Значительно отличающийся сигнал исключается из регистрации, так что определение записываемой скорости происходит только с помощью других сигналов, отличающихся друг от друга только в определенном диапазоне предельных значений, причем либо выбирается определенный сигнал, либо усредняются значения корректно работающих датчиков.
GPS-приемник 16 может представлять собой GPS-приемник навигационной системы, который в настоящее время используется обычно в качестве отдельного встраиваемого устройства. GPS-приемник 16 может также представлять собой блок управления для так называемого слежения, используемый прежде всего в грузовых автомобилях, который вырабатывает только позиционные данные и не может рассчитывать маршруты. При слежении позиционные данные передаются в диспетчерскую автопарка, в результате чего можно запросить местонахождение всех его транспортных средств. Разумеется, GPS-приемник 16 может быть также встроен в регистрирующий блок 12.
Датчик 18 ABS может представлять собой датчик, уже установленный в системе ABS транспортного средства. Поскольку транспортные средства в настоящее время, как правило, серийно оборудованы системой ABS, датчик ABS представляет собой недорогой датчик для тахографической системы. Поскольку отдельный датчик ABS при движении на крутых поворотах или при проскальзывании колеса вырабатывает значение, отличающееся от фактической скорости транспортного средства, может быть целесообразным использовать все датчики ABS или датчики одной оси, чтобы из соответствующих сигналов получить среднее значение, которое передается в регистрирующий блок 12, однако корректировка может осуществляться также посредством сигнала датчика угла поворота рулевого колеса.
На фиг.2 изображен в качестве примера процесс проверки достоверности с использованием GPS-данных.
Разумеется, процесс может быть перенесен и на другие данные.
В начале алгоритма производится прием 24 данных GPS, обеспечиваемых, например, GPS-приемником 16. Затем происходит проверка 26 достоверности данных GPS, то есть отсутствия нарушения или невозможности приема данных GPS. В случае достоверности данных GPS происходит сброс 28 счетчика ошибок регистрирующего блока 12. После этого данные (G(n)) GPS сохраняются с отметкой 30 времени. Непосредственно вслед за этим сохраняются с отметкой 32 времени данные (S(n)) другого датчика, например датчика 14 скорости. После этого происходит расчет 34 пройденного пути по текущим и предыдущим данным GPS, а также текущим и предыдущим данным датчиков. Далее происходит сравнение 36 того, одинаков ли вычисленный пройденный путь в обоих расчетах, то есть при обоих данных датчиков. В случае положительного результата сравнения 36 подается сигнал 38 на повторение алгоритма в установленные интервалы.
Если же результат сравнения 36 отрицательный, то есть вычисленные пройденные пути являются разными, то подается сообщение 40 об ошибке. За счет этого инициируются дальнейшие шаги по устранению ошибки и/или на дисплее 20 регистрирующего блока 12 отображается информация о манипуляциях. Дополнительно сообщение 40 об ошибке сохраняется на чип-карте и/или в регистрирующем блоке 12.
Если результат проверки 26 достоверности данных GPS отрицательный, то подается сообщение 41 об ошибке и при этом происходит увеличение 42 значения счетчика ошибок. В запросе 44 счетчика ошибок определяется, не превысило ли значение счетчика ошибок установленное значение. Если этого не произошло, то подается команда на повторный прием 24 данных GPS. При необходимости предусматривается пауза 46 перед следующим измерением. Если же показание счетчика ошибок выше установленного значения, то это указывает на повторно нарушенный или невозможный прием 24 данных GPS. В ответ на это процесс прерывается, и на дисплее появляется сообщение 40 об ошибке, или такое сообщение сохраняется на чип-карте и/или в регистрирующем блоке 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРЕК ТАХОГРАФ | 2011 |
|
RU2475704C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2019 |
|
RU2720224C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2591647C1 |
| ТАХОГРАФ ЦИФРОВОЙ ЭЛЕКТРОННЫЙ | 2014 |
|
RU2567700C1 |
| КОНТРОЛЬНОЕ УСТРОЙСТВО - ЦИФРОВОЙ ТАХОГРАФ | 2014 |
|
RU2584476C2 |
| ТАХОГРАФ, БОРТОВОЙ БЛОК ДЛЯ СБОРА ЗА ПОЛЬЗОВАНИЕ ДОРОГОЙ (MAUT-ON-BOARD-UNIT), ИНДИКАТОРНЫЙ ПРИБОР И СИСТЕМА | 2008 |
|
RU2506642C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАЧЕНИЯ ЗАВИСИМОГО ОТ ДВИЖЕНИЯ ПАРАМЕТРА | 2013 |
|
RU2662401C2 |
| СПОСОБ РАСПОЗНАВАНИЯ МАНИПУЛЯЦИЙ НАД ДАТЧИКОМ | 2005 |
|
RU2320017C2 |
| УСТРОЙСТВО С ТАХОГРАФОМ | 2006 |
|
RU2413302C2 |
| УСТАНОВОЧНЫЙ ТЕРМИНАЛ И СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ФУНКЦИЯМИ ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2573775C2 |
Изобретение относится к способу регистрации и записи по меньшей мере скорости для тахографической системы в качестве релевантной для регистрации информации. Техническим результатом является защита от несанкционированного доступа. При создании тахографической системы с максимальной защитой от манипуляций, в вычислительном блоке для определения скорости регистрируют и сравнивают между собой сигналы по меньшей мере двух независимых датчиков (14, 16, 18), и в случае значительно отличающихся сигналов сохраняют относящееся к соответствующему датчику сообщение об ошибке. В одном из вариантов сравнивают между собой сигналы по меньшей мере трех независимых датчиков (14, 16, 18) и проверяют на их достоверность, причем из множества сигналов исключают значительно отличающиеся сигналы, и записываемая скорость транспортного средства определяется с помощью только одного или нескольких сигналов, которые отличаются друг от друга в определенном диапазоне предельных значений. 2 н. и 15 з.п. ф-лы, 2 ил.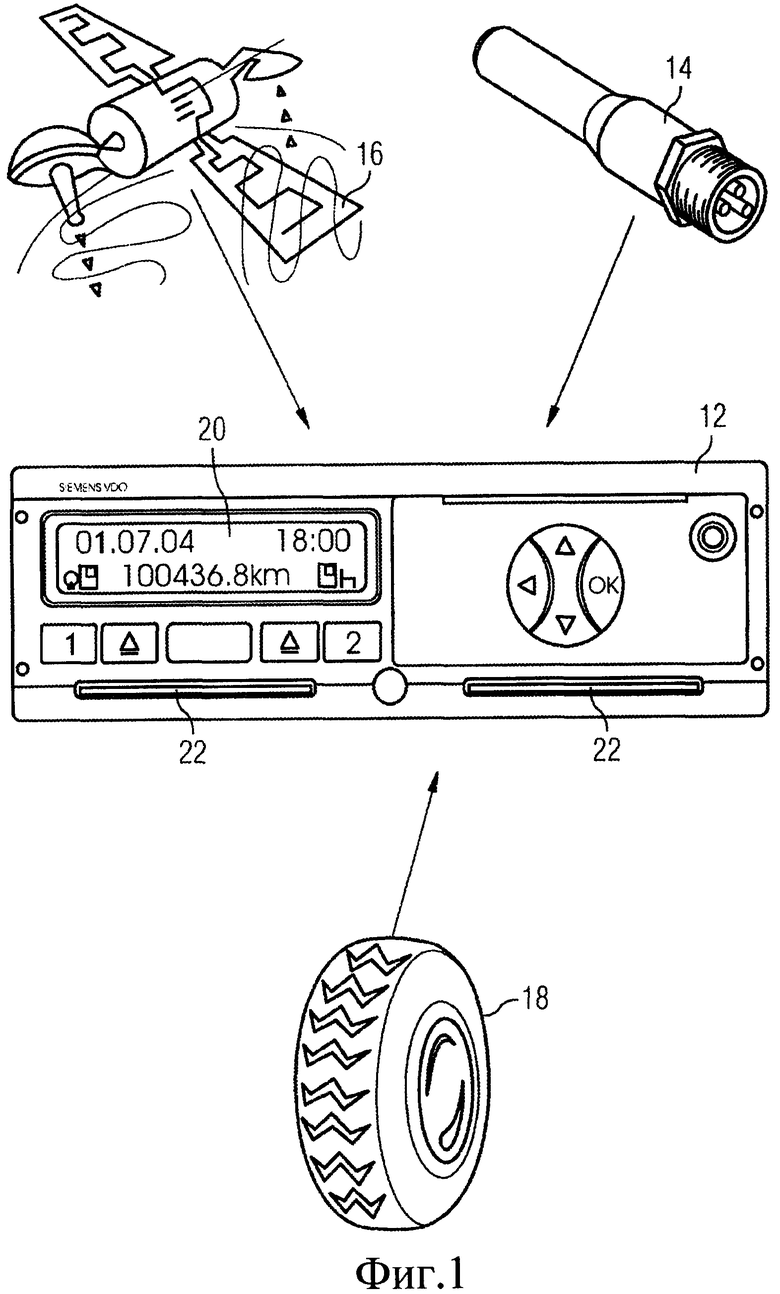
1. Способ регистрации и записи по меньшей мере скорости в качестве релевантной для регистрации информации для тахографической системы, в котором в вычислительном блоке для определения скорости регистрируют сигналы по меньшей мере двух независимых датчиков (14, 16, 18) и путем сравнения проверяют их достоверность, и в случае значительно отличающихся сигналов сохраняют относящееся к соответствующему датчику сообщение об ошибке,
отличающийся тем, что предусматривают по меньшей мере три датчика (14, 16, 18), одному датчику (14) присваивают функцию ведущего датчика и с помощью сигналов других датчиков (16, 18) проверяют подлинность ведущего датчика, причем в случае сигналов, вырабатываемых множеством датчиков (14, 16, 18) и отличающихся друг от друга только в определенном диапазоне предельных значений значительно отличающийся от них сигнал ведущего датчика (14) характеризуют как ложный, скорость определяют только с помощью сигналов других датчиков (16, 18), установленных как достоверные, и в памяти сохраняют сообщение об ошибке.
2. Способ по п.1, отличающийся тем, что данные между по меньшей мере одним датчиком (14, 16, 18) и вычислительным блоком передают в зашифрованном виде.
3. Тахографическая система для осуществления способа регистрации релевантных данных о транспортном средстве по одному из предыдущих пунктов, содержащая по меньшей мере два датчика (14, 16, 18) для регистрации скорости транспортного средства; связанный с датчиками (14, 16, 18) вычислительный блок для сравнения сигналов; и память для хранения по меньшей мере скорости в качестве релевантной для регистрации информации, причем по меньшей мере один из датчиков (14) является измерителем числа оборотов на стороне привода коробки передач и служит в качестве датчика для регистрации скорости,
отличающаяся тем, что предусмотрены три независимых датчика (14, 16, 18) и измерителю числа оборотов (14) присвоена функция ведущего датчика при сравнении сигналов, причем достоверность сигнала измерителя числа оборотов может быть проверена с помощью других датчиков (16, 18), ошибочные сигналы могут быть исключены с помощью вычислительного блока, а скорость может быть определена с помощью только тех выработанных датчиками (14, 16, 18) сигналов, которые отличаются друг от друга только в определенном диапазоне предельных значений.
4. Тахографическая система по п.3, отличающаяся тем, что тахометр (14) опломбирован.
5. Тахографическая система по п.3, отличающаяся тем, что по меньшей мере один из датчиков (16) является позиционным датчиком, который регистрирует данные о местоположении транспортного средства и с помощью сигналов которого может быть определена скорость.
6. Тахографическая система по п.5, отличающаяся тем, что позиционный датчик (16) является приемником глобальной системы позиционирования (GPS-приемником), встроенным в вычислительный блок.
7. Тахографическая система по п.5 или 6, отличающаяся тем, что в качестве позиционного датчика (16) служит GPS-приемник навигационной системы.
8. Тахографическая система по п.3, отличающаяся тем, что по меньшей мере один из датчиков (18) является колесным датчиком антиблокировочной системы (ABS) для определения числа оборотов колеса, с помощью которого может быть определена скорость.
9. Тахографическая система по п.3, отличающаяся тем, что по меньшей мере один из датчиков является измерителем числа оборотов для регистрации числа оборотов двигателя и вместе с датчиком для регистрации включенной передачи служит для регистрации скорости.
10. Тахографическая система по п.3, отличающаяся тем, что по меньшей мере один из датчиков является приемником для приема скорости, определенной стационарным устройством для измерения скорости.
11. Тахографическая система по любому из пп.8-10, отличающаяся тем, что данные, переданные между по меньшей мере одним датчиком и вычислительным блоком, зашифрованы.
12. Тахографическая система по п.3, отличающаяся тем, что позиционный датчик (16) является GPS-приемником, встроенным в вычислительный блок.
13. Тахографическая система по п.12, отличающаяся тем, что в качестве позиционного датчика (16) служит GPS-приемник навигационной системы.
14. Тахографическая система по п.13, отличающаяся тем, что по меньшей мере один из датчиков (18) является колесным датчиком ABS для определения числа оборотов колеса, с помощью которой может быть определена скорость.
15. Тахографическая система по п.14, отличающаяся тем, что по меньшей мере один из датчиков является измерителем числа оборотов для регистрации числа оборотов двигателя и вместе с датчиком для регистрации включенной передачи служит для регистрации скорости.
16. Тахографическая система по п.15, отличающаяся тем, что по меньшей мере один из датчиков является приемником для приема скорости, определенной стационарным устройством для измерения скорости.
17. Тахографическая система по любому из пп.12-16, отличающаяся тем, что данные, переданные между по меньшей мере одним датчиком и вычислительным блоком, зашифрованы.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Прибор для определения гранулометрического состава порошков | 1976 |
|
SU638877A1 |
| DE 10210320 А1, 07.11.2002 | |||
| СИСТЕМА БЕЗОПАСНОСТИ МОБИЛЬНЫХ ОБЪЕКТОВ | 2001 |
|
RU2174924C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЭКСПЛУАТАЦИОННЫХ ПАРАМЕТРОВ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2107946C1 |

