Изобретение относится к области устройств для определения координат местоположения наземного транспортного средства, в частности, к одометрическим системам навигации, и может быть применено для осуществления сухопутной навигации многоосных подвижных объектов.
Известные одометрические системы навигации содержат в своем составе механический датчик пути, соединенный с ходовой частью транспортного средства, курсовую систему, вычислительное устройство, курсоуказатель и планшет индикаторный (см., например, А.А. Псарёв и др. Военная топография. М., Военное издательство, 1986 г., стр. 267). Однако, точность получения в таких системах информации о горизонтальной составляющей пройденного пути, используемой для счисления приращений координат, существенно зависит от ряда факторов, к которым, в частности, относится макро- и микрорельеф местности. Если влияние макрорельефа местности (участков неровностей рельефа, соизмеримых с базой транспортного средства) можно компенсировать в данных системах путем измерения датчиком горизонта курсовой системы углов наклона продольной оси транспортного средства с последующим их учетом при вычислении горизонтальной составляющей пройденного пути, то влияние микрорельефа местности не компенсируется.
Цель настоящего изобретения - повышение точности измерения горизонтальной составляющей пройденного наземным транспортным средством пути за счет исключения погрешности, обусловленной микрорельефом местности.
Указанная цель достигается тем, что в предлагаемом устройстве в отличие от прототипа дополнительно введен датчик линейного перемещения, корпус которого прикреплен к кузову транспортного средства, ползунок датчика линейного перемещения жестко соединен с валом колеса транспортного средства, выход датчика линейного перемещения соединен с входом вычислительного устройства.
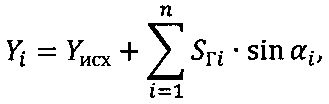
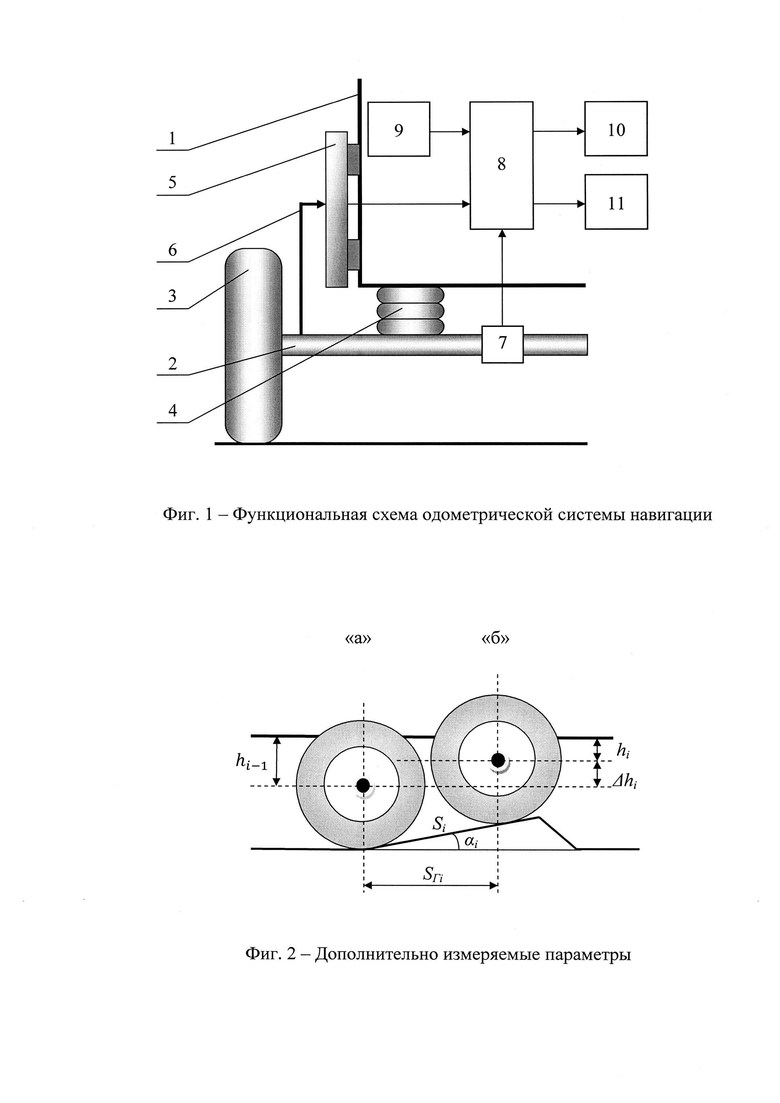
Сущность изобретения поясняется чертежом (фиг. 1), где показана одометрическая система навигации. Устройство включает в себя датчик линейного перемещения 5, корпус которого соединен с кузовом 1 транспортного средства, а ползунок 6 жестко соединен с валом 2 колеса 3 транспортного средства, При этом вал 2 колеса 3 соединен с кузовом 1 транспортного средства с помощью подвески, имеющей амортизатор 4. Выход датчика линейного перемещения 5 соединен с первым входом вычислительного устройства 8. Со вторым входом вычислительного устройства соединен выход механического датчика пути 7, с третьим входом соединен выход курсовой системы 9. Выходы вычислительного устройства 8 соединены со входами курсоуказателя 10 и планшета индикаторного 11.
Устройство работает следующим образом. При движении многоосного транспортного средства по местности, имеющей неровности высота которых не превышает хода амортизаторов 4 подвески его колес 3 и расстояние между которыми меньше его колесной базы (микрорельеф), продольная ось транспортного средства практически не будет изменять своего положения относительно плоскости горизонта, в то время как его колеса будут обкатывать каждую неровность. Под действием неровности на i-ом отрезке пути колесо 3, а следовательно и жестко связанный с валом 2 колеса ползунок 6 датчика линейного перемещения 5, переместятся в вертикальной плоскости из положения «а» в положение «б» на отрезок величиной Δhi (фиг. 2):
Δhi=hi-1 - hi,
где hi-1 и hi - расстояния между центром колеса 3 и днищем транспортного средства в положениях «а» и «б», соответственно.
В результате на выходе датчика линейного перемещения 5 появится сигнал Ui, пропорциональный величине Δhi,
Ui=k⋅Δhi,
где k - коэффициент передачи датчика линейного перемещения 5.
Сигнал Ui подается на первый вход вычислительного устройства 8. На второй вход вычислительного устройства подается сигнал с выхода механического датчика пути 7, который содержит информацию Si о длине i-го отрезка пути.
В вычислительном устройстве 8 рассчитывается горизонтальная составляющая SГi пройденного пути. Вычисления осуществляются по следующим формулам:

где βi - величина угла наклона i-го отрезка пути относительно плоскости горизонта.
С выхода курсовой системы 9 на вход вычислительного устройства 8 поступает также информация о величине αi дирекционного угла продольной оси транспортного средства. По полученным значениям SГi и αi в вычислительном устройстве вычисляются плоские прямоугольные координаты Xi и Yi текущего местоположения транспортного средства:
где Хисх и Yисх - прямоугольные координаты исходного пункта маршрута.
С выхода вычислительного устройства 8 сигналы, несущие информацию о дирекционном угле αi транспортного средства и прямоугольных координатах Xi и Yi его текущего местоположения, поступают на входы курсоуказателя 10 и планшета индикаторного 11, соответственно.
Таким образом, в предложенной одометрической системе навигации обеспечивается компенсация погрешности измерения горизонтальной составляющей пройденного пути наземным транспортным средством, обусловленной микрорельефом местности. Следовательно, в предложенном устройстве точность измерения горизонтальной составляющей пройденного пути не будет зависеть от такого фактора, как микрорельеф местности, что в конечном итоге приводит к повышению точности определения прямоугольных координат местоположения транспортного средства.
Использованные источники
- Полевой В.А. «Работа с трехкоординатным топопривязчиком». М.: «Недра», 1978 г., стр. 25;
- Псарёв А.А. и др. «Военная топография». М.: «Воениздат», 1986 г., стр. 267 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЧЕСКИЙ ИЗМЕРИТЕЛЬ ПУТИ | 2017 |
|
RU2679271C1 |
| МОБИЛЬНАЯ СТАНЦИЯ НАЗЕМНОЙ ПОДВИЖНОЙ СЛУЖБЫ | 2008 |
|
RU2371850C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ МЕСТООПРЕДЕЛЕНИЯ НАЗЕМНОГО ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2015 |
|
RU2638358C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УКЛОНОВ, КРИВИЗНЫ, НЕРОВНОСТИ И КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2162202C1 |
| Система управления огнем боевой машины | 2022 |
|
RU2785804C1 |
| СПОСОБ КОНТРОЛЯ МАРШРУТОВ СЛЕДОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2001 |
|
RU2194250C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| БЕСПЛАТФОРМЕННАЯ ИНТЕГРИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА СРЕДНЕЙ ТОЧНОСТИ ДЛЯ МОБИЛЬНОГО НАЗЕМНОГО ОБЪЕКТА | 2013 |
|
RU2539131C1 |
| РОБОТИЗИРОВАННОЕ ТРАНСПОРТНОЕ УСТРОЙСТВО ДЛЯ МОБИЛЬНОГО РОБОТИЗИРОВАННОГО РЕМОНТНО-ДИАГНОСТИЧЕСКОГО КОМПЛЕКСА | 2023 |
|
RU2806129C1 |
| СПОСОБ НАЧАЛЬНОГО ОРИЕНТИРОВАНИЯ ГИРОСКОПИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ДЛЯ НАЗЕМНЫХ ПОДВИЖНЫХ ОБЪЕКТОВ | 2016 |
|
RU2617147C1 |
Изобретение относится к области устройств для определения координат местоположения наземного транспортного средства, в частности к одометрическим системам навигации, и может быть применено для осуществления сухопутной навигации многоосных подвижных объектов. Одометрическая система навигации отличается от аналогов датчиком линейного перемещения, корпус которого прикреплен к кузову транспортного средства, ползунок датчика линейного перемещения жестко соединен с валом колеса транспортного средства, выход датчика линейного перемещения соединен с входом вычислительного устройства. Благодаря этому, при движении многоосного транспортного средства по местности, имеющей неровности, высота которых не превышает хода амортизаторов подвески, и расстояние между которыми меньше его колесной базы (микрорельеф), будет обеспечиваться компенсация погрешности измерения горизонтальной составляющей пройденного пути наземным транспортным средством, обусловленной микрорельефом местности. Технический результат - повышение точности измерения горизонтальной составляющей пройденного наземным транспортным средством пути. 2 ил.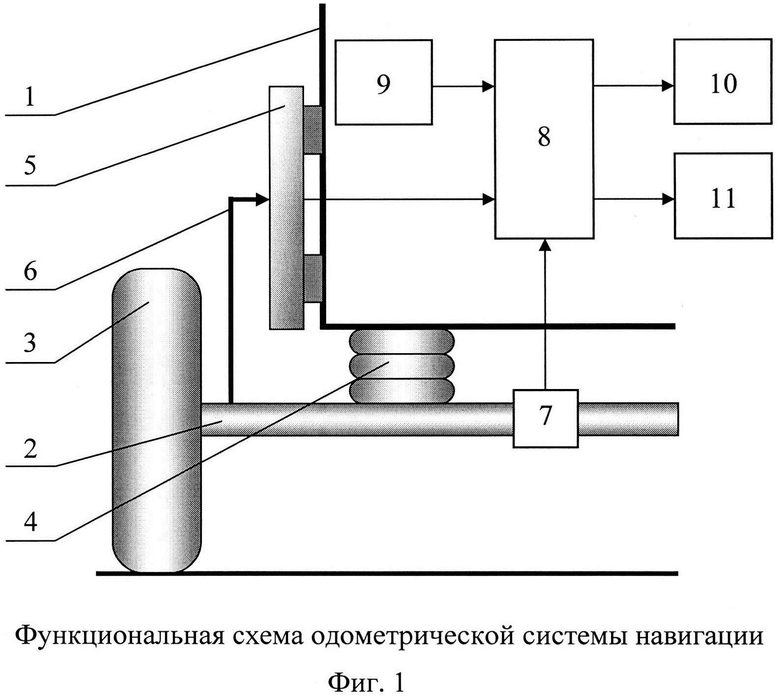
Одометрическая система навигации, содержащая механический датчик пути, курсовую систему, вычислительное устройство, курсоуказатель и планшет индикаторный, отличающаяся от аналогов тем, что в ее состав включается датчик дополнительного линейного перемещения, корпус которого прикреплен к кузову транспортного средства, ползунок датчика жестко соединен с валом колеса транспортного средства, выход датчика линейного перемещения соединен с входом вычислительного устройства, что, в свою очередь, позволяет повысить точность измерения горизонтальной составляющей пройденного пути за счет исключения погрешности, обусловленной микрорельефом местности.
| ПСАРЁВ А.А | |||
| И др | |||
| "ВОЕННАЯ ТОПОГРАФИЯ" | |||
| М.: "ВОЕНИЗДАТ", 1986 г., стр | |||
| Тепловой измеритель силы тока | 1921 |
|
SU267A1 |
| Контактное устройство | 1944 |
|
SU65501A1 |
| Отсадочная машина для обогащения углей | 1948 |
|
SU77963A1 |
| US 9488480 B2, 08.01.2016. | |||

