ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
[0001] По данной заявке испрашивается приоритет по предварительной заявке на патент США № 62/001,551, поданной 21 мая 2014 г., которая в полном объеме включена в настоящий документ посредством ссылки для всех целей.
УРОВЕНЬ ТЕХНИКИ
[0002] Настоящее изобретение относится, в общем, к области систем отслеживания и, в частности, к способам и оборудованию, используемым для обеспечения отслеживания элементов в различных контекстах в системе отслеживания динамического отношения сигнал-шум.
[0003] Системы отслеживания широко используются для отслеживания движения, положения, ориентации и расстояния, помимо других аспектов, объектов в самых разнообразных контекстах. Такие существующие системы отслеживания, в общем, включают в себя излучатель, который излучает электромагнитную энергию, и детектор, выполненный с возможностью регистрации электромагнитной энергии, иногда после отражения от объекта. В настоящее время понятно, что традиционные системы отслеживания имеют некоторые недостатки, и что необходимы усовершенствованные системы отслеживания для использования в различных контекстах, включая аттракционы парка развлечений, контроль (мониторинг) рабочего места, спортивные состязания, фейерверки, руководство работниками предприятия, робототехнику, системы безопасности, парковку, транспорт и пр.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В соответствии с вариантом осуществления настоящего изобретения, система аттракциона для катания парка развлечений включает в себя: транспортное средство аттракциона для катания, расположенное на пути аттракциона для катания и выполненное с возможностью перемещения вдоль пути аттракциона для катания; множество обратно-отражающих меток, расположенных на транспортном средстве аттракциона для катания, вдоль пути аттракциона для катания или обоих; излучающую подсистему, выполненную с возможностью испускания электромагнитного излучения к множеству обратно-отражающих меток; подсистему регистрации, выполненную с возможностью регистрации рисунка обратного отражения электромагнитного излучения от множества обратно-отражающих меток с одновременной фильтрацией электромагнитного излучения, которое не является обратно-отраженным; и систему управления, соединенную с возможностью связи с подсистемой регистрации и имеющую схему обработки, выполненную с возможностью: осуществлять контроль за рисунком обратного отражения электромагнитного излучения от множества обратно-отражающих меток на предмет изменений; и отслеживать перемещение транспортного средства аттракциона для катания в пространстве и времени на основании изменений в рисунке обратно-отраженного электромагнитного излучения, зарегистрированного подсистемой регистрации.
[0005] В соответствии с другим вариантом осуществления настоящего изобретения, система аттракциона для катания парка развлечений включает в себя транспортное средство аттракциона для катания, расположенное на пути аттракциона для катания и выполненное с возможностью перемещения вдоль пути аттракциона для катания; множество обратно-отражающих меток, расположенных на транспортном средстве аттракциона для катания, вдоль пути аттракциона для катания или обоих; излучающую подсистему, выполненную с возможностью испускания электромагнитного излучения к множеству обратно-отражающих меток; подсистему регистрации, выполненную с возможностью регистрации рисунка обратного отражения электромагнитного излучения от множества обратно-отражающих меток с одновременной фильтрацией электромагнитного излучения, которое не является обратно-отраженным; и систему управления, соединенную с возможностью связи с подсистемой регистрации и имеющую схему обработки, выполненную с возможностью: осуществлять контроль за рисунком обратного отражения электромагнитного излучения от множества обратно-отражающих меток на предмет изменений; и отслеживать перемещение транспортного средства аттракциона для катания в пространстве и времени на основании изменений в рисунке обратно-отраженного электромагнитного излучения, зарегистрированного подсистемой регистрации.
[0006] В соответствии с дополнительным вариантом осуществления настоящего изобретения, система парка развлечений включает в себя систему управления, содержащую схему обработки, выполненную с возможностью приема данных, указывающих обратное отражение электромагнитного излучения множеством обратно-отражающих меток, причем система управления выполнена с возможностью осуществления контроля за обратно-отраженным электромагнитным излучением для отслеживания положения и перемещения транспортного средства аттракциона для катания относительно пути транспортного средства аттракциона для катания только на основании изменений в обратно-отраженном электромагнитном излучении.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0007] Эти и другие признаки, аспекты и преимущества настоящего изобретения можно лучше понять на основании нижеследующего подробного описания, приведенного со ссылкой на прилагаемые чертежи, в которых аналогичные символы представляют аналогичные части на протяжении чертежей, в которых:
[0008] фиг. 1 - схема системы отслеживания использования устройства динамического отношения сигнал-шум для отслеживания объектов, в соответствии с вариантом осуществления настоящего изобретения;
[0009] фиг. 2 - схема другой системы отслеживания использования устройства динамического отношения сигнал-шум для отслеживания объектов, в соответствии с вариантом осуществления настоящего изобретения;
[0010] фиг. 3 - схематический вид системы отслеживания, показанной на фиг. 1, отслеживающей обратно-отражающую метку на человеке, в соответствии с вариантом осуществления настоящего изобретения;
[0011] фиг. 4 - схематическое представление анализа, осуществляемого системой отслеживания, показанной на фиг. 1, в которой положение и перемещение человека или объекта отслеживается в пространстве и времени, в соответствии с вариантом осуществления настоящего изобретения;
[0012] фиг. 5 - вид сверху комнаты с сетчатым рисунком обратно-отражающих меток для отслеживания положений людей в комнате посредством системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0013] фиг. 6 - вид в вертикальном разрезе системы отслеживания, показанной на фиг. 1, отслеживающей человека без отслеживания перемещения обратно-отражающей метки и без отслеживания преграждения обратно-отражающей метки, в соответствии с вариантом осуществления настоящего изобретения;
[0014] фиг. 7 - вид в вертикальном разрезе комнаты с сетчатым рисунком обратно-отражающих меток, расположенных на стене и полу комнаты для отслеживания положений людей и объектов в комнате посредством системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0015] фиг. 8 - вид в разрезе обратно-отражающих меток, имеющих разные покрытия для обеспечения разных длин волны электромагнитного излучения, отражающегося к детектору системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0016] фиг. 9A-9C изображают, каким образом можно отслеживать объект в трех пространственных измерениях системой отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0017] фиг. 10 - блок-схема операций, демонстрирующая вариант осуществления способа отслеживания отражения и управления элементов парка развлечений на основании отслеживаемого отражения с использованием системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0018] фиг. 11 - блок-схема операций, демонстрирующая вариант осуществления способа отслеживания обратного отражения для оценивания информации, относящейся к машинам и людям, и управления элементами парка развлечений на основании оцененной информации с использованием системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0019] фиг. 12 - схематический вид варианта осуществления аттракциона парка развлечений и системы управления, выполненной с возможностью отслеживания оборудования аттракциона в отношении других машин или людей, в соответствии с вариантом осуществления настоящего изобретения;
[0020] фиг. 13 - схематический вид сверху комнаты с сетчатым рисунком обратно-отражающих меток для отслеживания положения людей и машин в комнате с помощью системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0021] фиг. 14 - схематический вид сверху комнаты с сетчатым рисунком обратно-отражающих меток для отслеживания положения людей относительно границы применительно к машинам, с помощью системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0022] фиг. 15 - схема последовательности операций процесса способа для управления работой машин в комнате, показанной на фиг. 13, посредством обратной связи от системы отслеживания, в соответствии с вариантом осуществления настоящего изобретения;
[0023] фиг. 16 - схематический вид сверху машин, управляемо перемещающихся через скопление людей на основании обратной связи, принятой от системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0024] фиг. 17 - схематический вид сверху машин, управляемо нацеливающихся на группы людей на основании обратной связи, принятой от системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0025] фиг. 18 - иллюстрация анимированной фигуры с размещенными на ней обратно-отражающими метками для использования с системой отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0026] фиг. 19 - вид сверху парка развлечений, имеющего радиоуправляемую систему без участия человека (UAS), выполненную с возможностью направлять радиоуправляемые транспортные средства без водителя (UAV) через парк с использованием системы отслеживания, показанной на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0027] фиг. 20 - вид снизу UAV, имеющего интерактивные компоненты управления положением, в соответствии с вариантом осуществления настоящего изобретения;
[0028] фиг. 21 - вид спереди UAV, имеющего систему отслеживания, показанную на фиг. 1, встроенную в его корпус, в соответствии с вариантом осуществления настоящего изобретения;
[0029] фиг. 22 - схематический вид сверху последовательности транспортных средств аттракциона парка развлечений для катания с метками, используемыми для переноса внедренных данных на систему отслеживания, показанную на фиг. 1, в соответствии с вариантом осуществления настоящего изобретения;
[0030] фиг. 23 - вид в перспективе двух ортогонально расположенных систем отслеживания, показанных на фиг. 1, регистрирующих трехмерное положение транспортного средства увеселительного аттракциона, в соответствии с вариантом осуществления настоящего изобретения;
[0031] фиг. 24 - вид в перспективе транспортного средства аттракциона для катания парка развлечений, движущегося вдоль ограниченного пути, имеющего обратно-отражающие метки на пути, чтобы система отслеживания, показанная на фиг. 1, могла оценивать производительность транспортного средства аттракциона для катания, в соответствии с вариантом осуществления настоящего изобретения;
[0032] фиг. 25 - вид сверху участка ограниченного пути, показанного на фиг. 24, схематически демонстрирующий преграждение и отсутствие преграждения обратно-отражающих меток на пути транспортными средствами аттракциона для катания, движущимися вдоль пути, в соответствии с вариантом осуществления настоящего изобретения;
[0033] фиг. 26 - вид сверху неограниченного пути, имеющего обратно-отражающие метки, расположенные в различных точках вдоль пути, чтобы система отслеживания, показанная на фиг. 1, могла осуществлять, по меньшей мере, часть управления зоной блоков положений транспортного средства аттракциона для катания, в соответствии с вариантом осуществления настоящего изобретения;
[0034] фиг. 27 - вид в вертикальном разрезе варианта осуществления неограниченного пути, показанного на фиг. 26, в котором обратно-отражающие метки на пути и система отслеживания, показанные на фиг. 1, используются для направления транспортного средства аттракциона для катания в заранее определенный пункт назначения, в соответствии с вариантом осуществления настоящего изобретения;
[0035] фиг. 28 - вид сверху пути, показанного на фиг. 27, более подробно изображающий, каким образом обратно-отражающие метки располагаются для направления транспортного средства аттракциона для катания, в соответствии с вариантом осуществления настоящего изобретения;
[0036] фиг. 29 - вид сверху пути, показанного на фиг. 27, более подробно изображающий, каким образом обратно-отражающие метки могут располагаться слоями для направления транспортного средства аттракциона для катания, в соответствии с вариантом осуществления настоящего изобретения; и
[0037] фиг. 30 - вид сверху другого варианта осуществления пути, показанного на фиг. 27, изображающий каким образом обратно-отражающие метки могут располагаться для направления транспортного средства аттракциона для катания, в соответствии с вариантом осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0038] В целом, системы отслеживания могут использовать самые разнообразные входные сигналы, полученные из окружающей среды для отслеживания некоторых объектов. Источник входных сигналов может зависеть, например, от типа осуществляемого отслеживания и возможностей системы отслеживания. Например, системы отслеживания могут использовать датчики, расположенные в окружающей среде, для активной генерации выходных сигналов, поступающих на главный контроллер. Затем контроллер может обрабатывать сгенерированные выходные сигналы для определения некоторой информации, используемой для отслеживания. Один пример такого отслеживания может включать в себя отслеживание движения объекта, к которому прикреплен датчик. Такая система также может использовать одно или более устройств, используемых для окунания зоны в электромагнитное излучение, магнитное поле и т.п., где электромагнитное излучение или магнитное поле используется как опора, с которой контроллер сравнивает выходной сигнал датчика. Очевидно, такие активные системы, если они реализованы для отслеживания большого количества объектов или даже людей, могут быть весьма дороги в эксплуатации и требуют высокой мощности процессора для главного контроллера системы отслеживания.
[0039] Другие системы отслеживания, например, некоторые пассивные системы отслеживания, могут осуществлять отслеживание, не обеспечивая источник освещения и т.п. Например, некоторые системы отслеживания могут использовать одну или более камер для получения схем или грубых скелетных оценок объектов, людей и т.д. Однако в случаях, когда фоновое освещение может быть интенсивным, например, на улице жарким ясным днем, точность такой системы может снижаться вследствие изменения степени шума, принятого детекторами пассивной системы отслеживания.
[0040] Из вышеприведенного описания следует, что в настоящее время понятно, что традиционные системы отслеживания имеют некоторые недостатки, и что необходимы усовершенствованные системы отслеживания для использования в различных контекстах, включая аттракционы парка развлечений, контроль рабочего места, спортивные состязания, и, в том числе, системы безопасности. Например, в настоящее время понятно, что усовершенствованные системы отслеживания могут использоваться для улучшения работы в различных установках парка развлечений и других увеселительных аттракционах.
[0041] В соответствии с одним аспектом настоящего изобретения, система отслеживания динамического отношения сигнал-шум использует испущенное электромагнитное излучение и, в некоторых вариантах осуществления, обратное отражение, для обеспечения регистрации меток и/или объектов в поле зрения системы отслеживания. Раскрытая система отслеживания может включать в себя излучатель, выполненный с возможностью испускания электромагнитного излучения в поле зрения, считывающее устройство, выполненное с возможностью регистрации электромагнитного излучения, обратно отраженного от объектов в поле зрения, и контроллер, выполненный с возможностью осуществления различных процедур обработки и анализа, в том числе, интерпретации сигналов от считывающего устройства и управления автоматизированным оборудованием на основании зарегистрированных положений объектов или меток. Раскрытая система отслеживания также может быть выполнена с возможностью отслеживания нескольких разных объектов в одно и то же время (с использованием одних и тех же признаков излучения и регистрации). В некоторых вариантах осуществления, система отслеживания отслеживает положение обратно-отражающих меток, расположенных на объектах, для оценивания положения объектов. Используемые здесь обратно-отражающие метки представляют собой отражающие метки, предназначенные для обратного отражения электромагнитного излучения в направлении, приблизительно обратном направлению испускания электромагнитного излучения. В частности, обратно-отражающие метки, используемые в соответствии с настоящим изобретением, будучи освещены, отражают электромагнитное излучение обратно к источнику излучения в узком конусе. Напротив, некоторые другие отражающие материалы, например, рассеивающие материалы, могут обеспечивать диффузное отражение, при котором электромагнитное излучение отражается во многих направлениях. Кроме того, зеркала, которые также отражают электромагнитное излучение, обычно не обеспечивают обратное отражение. Напротив, зеркала обеспечивают зеркальное отражение, при котором угол электромагнитного излучения (например, света например, инфракрасного, ультрафиолетового, видимого, или радиоволн и т.д.), падающего на зеркало, отражается под равным, но противоположным углом (относительно источника излучения).
[0042] Обратно-отражающие материалы, используемые в соответствии с изложенными ниже вариантами осуществления, можно легко получить из нескольких коммерческих источников. Один пример включает в себя обратно-отражающую ленту, которую можно прикреплять к нескольким разным объектам (например, внешним элементам, предметам одежды, игрушкам). Вследствие того, каким образом происходит обратное отражение с использованием таких меток совместно с детекторами 16 используемыми в соответствии с настоящим изобретением, обратно-отражающие метки не могут выцветать на солнце или даже в присутствие других излучателей, которые испускают электромагнитное излучение на длинах волны, которые перекрываются с длинами волны, представляющими интерес. Соответственно, раскрытая система отслеживания может быть более надежной, в особенности, в наружной установке и в присутствие других источников электромагнитного излучения, по сравнению с существующими оптическими системами отслеживания.
[0043] Хотя настоящее изобретение применимо к нескольким разным контекстам, раскрытые здесь варианты осуществления относятся, помимо прочего, к различным аспектам, относящимся к отслеживанию объектов и людей в парке развлечений, и, в ряде случаев, к управлению оборудованием парка развлечений (например, автоматизированным оборудованием) на основании информации, полученной от такой системы отслеживания динамического отношения сигнал-шум. Действительно, в настоящее время понятно, что за счет использования раскрытых систем отслеживания, может осуществляться надежная и эффективная работа парка развлечений, вне зависимости от количества движущихся объектов, посетителей, сотрудников, звуков, источников света и т.д., в парке развлечений, которые могли бы создавать высокие уровни шума для других систем отслеживания, в частности, других оптических систем отслеживания, которые не используют обратно-отражающие метки раскрытым здесь образом.
[0044] В некоторых аспектах настоящего изобретения, система управления парка развлечений (например, система управления, связанная с конкретной зоной парка развлечений, например, аттракционом для катания) может использовать информацию, полученную системой отслеживания динамического отношения сигнал-шум для осуществления контроля за и оценивания информации, относящейся к людям, машинам, транспортным средствам (например, транспортным средствам посетителей, служебным транспортным средствам) и аналогичным элементам в зоне для обеспечения информации, которая может быть полезна для более эффективной работы парка развлечений. Например, информация может использоваться для определения, можно ли запускать некоторые автоматизированные процессы или иначе разрешать их осуществление. Оцененная информация, относящаяся к транспортным средствам в парке развлечений, может включать в себя, например, положение, перемещение, размер или другую информацию, относящуюся к автоматизированным машинам, транспортным средствам аттракциона для катания и т.д., в некоторых зонах парка развлечений. В порядке неограничительного примера, информацию можно оценивать для отслеживания людей и машин для обеспечения улучшенной интерактивности между людьми и машинами, для отслеживания радиоуправляемых транспортных средств без водителя и управления ими, для отслеживания транспортных средств аттракциона для катания и управления ими и любых эффектов представления, связанных с транспортным средством аттракциона для катания, и т.д.
[0045] Некоторые аспекты настоящего изобретения можно лучше понять, обратившись к фиг. 1, которая, в целом, демонстрирует, каким образом система 10 отслеживания динамического отношения сигнал-шум (в дальнейшем именуемая ʺсистемой 10 отслеживанияʺ) может быть объединена с оборудованием 12 парка развлечений в соответствии с настоящими вариантами осуществления. Как показано, система 10 отслеживания включает в себя излучатель 14 (который может представлять собой целую или часть излучающей подсистемы, имеющей одно или более излучающих устройств и соответствующую управляющую схему), выполненный с возможностью испускания одной или более длин волны электромагнитного излучения (например, света, например, инфракрасного, ультрафиолетового, видимого, или радиоволн и т.д.) в общем направлении. Система 10 отслеживания также включает в себя детектор 16 (который может представлять собой целую или часть подсистемы регистрации, имеющей один или более датчиков, камер и т.п. и соответствующую управляющую схему), выполненный с возможностью регистрации электромагнитного излучения, отраженного в результате испускания, как более подробно описано ниже.
[0046] Для управления работой излучателя 14 и детектора 16 (излучающей подсистемы и подсистемы регистрации) и осуществления различных процедур обработки сигнала, обусловленных процессом излучения, отражения и регистрации, система 10 отслеживания также включает в себя блок 18 управления, соединенный с возможностью связи с излучателем 14 и детектором 16. Соответственно, блок 18 управления может включать в себя один или более процессоров 20 и один или более блоков 22 памяти, которые могут, в целом, именоваться здесь ʺсхемой обработкиʺ. В порядке конкретного, но неограничительного примера, один или более процессоров 20 могут включать в себя одну или более специализированных интегральных схем (ASIC), одну или более вентильных матриц, программируемых пользователем (FPGA), один или более процессоров общего назначения или любую их комбинацию. Дополнительно, один или более блоков 22 памяти могут включать в себя энергозависимую память, например, оперативную память (RAM), и/или энергонезависимую память, например, постоянную память (ROM), оптические приводы, жесткие диски или твердотельные жесткие диски. В некоторых вариантах осуществления, блок 18 управления может образовывать, по меньшей мере, часть системы управления, выполненную с возможностью координации работы различных элементов парка развлечений, в том числе, оборудования 12. Как описано ниже, такая интегрированная система может именоваться системой аттракционов и управления парка развлечений.
[0047] Система 10 отслеживания, в частности, выполнена с возможностью регистрации положения освещенного компонента, например, обратно-отражающей метки 24, имеющей обратно-отражающий материал, надлежащим образом коррелирующий относительно сетки, рисунок, источника излучения, неподвижных или движущихся внешних элементов и т.п. В некоторых вариантах осуществления, система 10 отслеживания сконструирована для использования относительного расположения для идентификации, существует ли корреляция между одним или более такими освещенными компонентами и конкретным действием, подлежащим осуществлению оборудованием 12 парка развлечений, например, запуском эффекта представления, отправлением транспортного средства аттракциона для катания, закрытием прохода, синхронизацией камер системы безопасности с перемещением и т.д. В более общем случае, действие может включать в себя управление движением машины, формирование или адаптацию изображения и аналогичные процессы.
[0048] Как показано, обратно-отражающая метка 24 располагается на объекте 26, который может соответствовать любому количеству статических или динамических элементов. Например, объект 26 может представлять граничные элементы аттракциона парка развлечений, например, пол, стену, проход и т.п., или может представлять предмет, носимый посетителем, сотрудником парка, или аналогичный объект. В действительности, как изложено ниже, в зоне аттракциона парка развлечений может присутствовать много подобных обратно-отражающих меток 24, и система 10 отслеживания может регистрировать отражение от некоторых или всех меток 24 и может осуществлять различные анализы на основании этой регистрации.
[0049] Согласно принципу работы системы 10 отслеживания, излучатель 14 испускает электромагнитное излучение, в целях иллюстрации представленное расширяющимся пучком 28 электромагнитного излучения, для избирательного освещения, окунания или заполнения зоны 30 регистрации электромагнитным излучением. Пучок 28 электромагнитного излучения призван, в целом, представлять любую форму электромагнитного излучения, которое можно использовать в соответствии с настоящими вариантами осуществления, например, формы света (например, инфракрасного, видимого, UV) и/или другие диапазоны электромагнитного спектра (например, радиоволны и т.д.). Однако в настоящее время также понятно, что, в некоторых вариантах осуществления, может быть желательно использовать определенные диапазоны электромагнитного спектра в зависимости от различных факторов. Например, в одном варианте осуществления, может быть желательно использовать формы электромагнитного излучения, невидимые для человеческого глаза или неслышные для человеческого уха, чтобы электромагнитное излучение, используемое для отслеживания, не отвлекало посетителей от восприятия. Кроме того, в настоящее время также понятно, что некоторые формы электромагнитного излучения, например, некоторые длины волны света (например, инфракрасного) могут быть более желательными, чем другие, в зависимости от конкретной установки (например, является ли установка ʺтемнойʺ, или предполагается ли, что люди пересекают путь пучка). Опять же, зона 30 регистрации может соответствовать всей или части зоны аттракциона парка развлечений, например, сцены представления, зоны посадки на транспортное средство аттракциона для катания, зоны ожидания перед входом в аттракцион для катания или на представление и т.д.
[0050] Пучок 28 электромагнитного излучения, в некоторых вариантах осуществления, может представлять множественные световые пучки (пучки электромагнитного излучения), испускаемые из разных источников (всей или части излучающей подсистемы). Кроме того, в некоторых вариантах осуществления, излучатель 14 выполнен с возможностью испускания пучка 28 электромагнитного излучения на частоте, соответствующей материалу обратно-отражающей метки 24 (например, способной отражаться обратно-отражающими элементами метки 24). Например, обратно-отражающая метка 24 может включать в себя покрытие из обратно-отражающего материала, нанесенное на корпус объекта 26 или сплошной кусок материала, соединенный с корпусом объекта 26. В порядке более конкретного, но неограничительного примера, обратно-отражающий материал может включать в себя сферические и/или призматические отражающие элементы, внедренные в отражающий материал для обеспечения обратного отражения. Опять же, в некоторых вариантах осуществления многие подобные обратно-отражающие метки 24 могут присутствовать, и могут располагаться в конкретном рисунке, хранящемся в памяти 22, для обеспечения дополнительных процедур обработки, анализа и управления, подлежащих осуществлению блоком 18 управления (например, системой управления).
[0051] Обратно-отражающая метка 24 может отражать большую часть электромагнитного излучения (например, длин волны инфракрасного, ультрафиолетового, видимого спектра, или радиоволн и т.д.) падающего пучка 28 электромагнитного излучения обратно к детектору 16 в относительно строго определенном конусе, центральная ось которого наклонена под углом, по существу, равным углу падения. Это отражение облегчает идентификацию положения обратно-отражающей метки 24 системой 10 и его корреляцию с различной информацией, хранящейся в памяти 22 (например, рисунками, возможными положениями). Затем эта информация положения (полученная на основании отраженного электромагнитного излучения) может использоваться блоком 18 управления для осуществления различных процедур анализа и/или процедур управления, например, для определения, предписывать ли запуск оборудования 12 парка развлечений или другое управление им.
[0052] В частности, в ходе эксплуатации, детектор 16 системы 10 может регистрировать пучок 28 электромагнитного излучения, обратно отраженный от обратно-отражающей метки 24 и предоставления данных, связанных с регистрацией, блоку 18 управления по линиям связи 31 для обработки. Детектор 16, в частности, может идентифицировать метку 24 на основании некоторых указанных длин волны электромагнитного излучения, испущенного и отраженного, и, таким образом, избегать проблем ложных обнаружений. Например, детектор 16 может быть, в частности, выполнен с возможностью регистрации некоторых длин волны электромагнитного излучения (например, соответствующих испущенным излучателем 14) путем использования физических фильтров электромагнитного излучения, фильтров сигнала и пр. Кроме того, детектор 16 может использовать конкретную компоновку оптических признаков регистрации и фильтров электромагнитного излучения для захвата, по существу, только обратно-отраженного электромагнитного излучения.
[0053] Например, детектор 16 может быть выполнен с возможностью регистрации длин волны электромагнитного излучения, обратно отраженного обратно-отражающими метками 24 одновременно с фильтрацией длин волны электромагнитного излучения, не обратно отраженного метками 24, включая длины волны, представляющие интерес. Таким образом, детектор 16 может быть выполнен с возможностью, в частности, регистрировать (например, захватывать) обратно-отраженное электромагнитное излучение, при этом не регистрируя (например, захватывая) электромагнитное излучение, которое не является обратно-отраженным. В одном варианте осуществления, детектор 16 может использовать направленность, связанную с обратным отражением, для осуществления этой избирательной фильтрации. Соответственно, хотя детектор 16 принимает электромагнитное излучение из различных источников (в том числе, паразитно отраженное электромагнитное излучение, а также внешнее электромагнитное излучение), детектор 16, в частности, выполнен с возможностью отфильтровывать все или, по существу, все паразитно отраженные сигналы, оставляя при этом все или, по существу, все полезные сигналы. Таким образом, отношение сигнал/шум сигналов, фактически обрабатываемых детектором 16 и блоком 18 управления, является очень высоким, независимо от отношения сигнал/шум, которое существует для электромагнитных диапазонов, представляющих интерес, вне детектора 16.
[0054] Например, детектор 16 может принимать обратно-отраженное электромагнитное излучение (например, от обратно-отражающих меток 24) и внешнее электромагнитное излучение из зоны (например, зоны аттракциона для посетителей). Внешнее электромагнитное излучение можно фильтровать, тогда как обратно-отраженное электромагнитное излучение, которое является направленным, можно не фильтровать (например, пропускать в обход фильтра). Таким образом, в некоторых вариантах осуществления, ʺизображениеʺ, генерируемое детектором 16, может включать в себя, по существу, темный (например, черный или пустой) фоновый сигнал, причем, по существу, только обратно-отраженное электромагнитное излучение создает контрастность.
[0055] В соответствии с некоторыми вариантами осуществления, обратно-отраженное электромагнитное излучение может включать в себя разные длины волны, которые отличимы друг от друга. В одном варианте осуществления, фильтры детектора 16 могут иметь оптические качества и могут располагаться в детекторе таким образом, чтобы оптические регистрирующие устройства детектора 16 принимают только, по существу, длины волны электромагнитного излучения, обратно отраженного обратно-отражающими метками 24 (или другими обратно-отражающими элементами), а также любые желаемые фоновые длины волны (которые могут обеспечивать фоновую или другую ландшафтную информацию). Для создания сигналов из принятого электромагнитного излучения, в порядке примера, детектор 16 может представлять собой камеру, имеющую множество элементов захвата электромагнитного излучения (например, датчиков на устройствах с зарядовой связью (CCD) и/или комплементарных структурах металл-оксид-полупроводник (CMOS), соответствующих пикселям). В одном иллюстративном варианте осуществления, детектор 16 может представлять собой систему камер amp® с высоким динамическим диапазоном (HDR) производства Contrast Optical Design and Engineering, Inc., Альбукерке, Нью-Мексико.
[0056] Поскольку обратное отражение обратно-отражающими метками 24 отличается тем, что конус отраженного электромагнитного излучения падает на детектор 16, блок 18 управления может, в свою очередь, коррелировать вершину конуса, где отраженное электромагнитное излучение наиболее интенсивно, с точечным источником отражения. На основании этой корреляции, блок 18 управления может идентифицировать и отслеживать положение этого точечного источника или может идентифицировать и осуществлять контроль за рисунком отражения многими подобными обратно-отражающими метками 24.
[0057] Например, как только блок 18 управления принимает данные от детектора 16, блок 18 управления может использовать известные визуальные границы или установленную ориентацию детектора 16 для идентификации положения (например, координат), соответствующего обнаруженной обратно-отражающей метке 24. При наличии множественных неподвижных обратно-отражающих меток 24, блок 18 управления может сохранять известные положения (например, положения) обратно-отражающих меток 24 для обеспечения осуществления контроля за рисунком отражения. Благодаря контролю за рисунком отражения, блок 18 управления может идентифицировать блокировку (преграждение) некоторых обратно-отражающих меток 24 различными движущимися объектами, посетителями, сотрудниками и т.д. Следует также заметить, что основания для этих сравнений можно обновлять на основании, например, как долго конкретная обратно-отражающая метка 24 располагалась и использовалась в своем положении. Например, сохраненный рисунок отражения, связанный с одной из меток 24, можно периодически обновлять на стадии калибровки, которая включает в себя период времени, в течение которого объекты или люди предположительно не проходят мимо метки 24. Такие перекалибровки могут осуществляться периодически, чтобы метка, использовавшаяся в течение продолжительного периода времени и потерявшая свою обратно-отражающую способность не приводила к ошибочной регистрации события преграждения.
[0058] В других вариантах осуществления, помимо или вместо отслеживания одной или более обратно-отражающих меток 24, система 10 отслеживания может быть выполнена с возможностью регистрации и отслеживания различных других объектов, находящихся в зоне 30 регистрации. Такие объекты 32 могут включать в себя, помимо прочего, транспортные средства аттракциона для катания, людей (например, посетителей, сотрудников) и другое движущееся оборудование парка. Например, детектор 16 системы 10 может регистрировать пучок 28 электромагнитного излучения, отраженного от объекта 32 (без обратно-отражающих меток 24) и предоставления данных, связанных с этой регистрацией, блоку 18 управления. Таким образом, детектор 16 может регистрировать объект 32 полностью на основании диффузного или зеркального отражения электромагнитной энергии от объекта 32. В некоторых вариантах осуществления, объект 32 может быть покрыт конкретным покрытием, которое отражает пучок 28 электромагнитного излучения регистрируемым и заранее определенным образом. Соответственно, как только блок 18 управления принимает данные от детектора 16, блок 18 управления может определять, что покрытие, связанное с объектом 32, отразило электромагнитное излучение, и также может определять источник отражения для идентификации положения объекта 32.
[0059] Независимо от того, являются ли обратно-отражающие метки 24 неподвижными или движущимися, процесс испускания пучка 28 электромагнитного излучения, регистрации отраженного электромагнитного излучения от обратно-отражающих меток 24 (или объектов 32 без или, по существу, без обратно-отражающего материала), и определения положения обратно-отражающей метки 24 или объекта 32 может многократно осуществляться блоком 18 управления в течение короткого периода. Этот процесс может осуществляться с различными интервалами, где процесс инициируется в заранее определенные моменты времени, или может осуществляться, по существу, непрерывно, повторно инициируясь, по существу, сразу после завершения процесса. Согласно вариантам осуществления, в которых обратно-отражающие метки 24 неподвижны, и блок 18 управления осуществляет контроль за обратно-отражающимся рисунком для идентификации блокировки метки, процесс может осуществляться с интервалами для получения одного обратно-отражающегося рисунка в каждом интервале. Это можно рассматривать для представления единичного кадра, рисунок отражения которого соответствует рисунку заблокированных и разблокированных обратно-отражающих меток 24.
[0060] С другой стороны, такие процедуры могут осуществляться, по существу, непрерывно для облегчения идентификации пути и/или траектории движения обратно-отражающей метки 24. Метка 24, движущаяся в зоне 30 регистрации, будет зарегистрироваться в течение конкретного временного кадра или просто в непрерывной последовательности. При этом рисунок отражения будет генерироваться и идентифицироваться в течение периода времени.
[0061] В соответствии с вышеизложенными вариантами осуществления, детектор 16 и блок 18 управления могут работать на разнообразных временных кадрах в зависимости от отслеживания, подлежащего осуществлению, и предполагаемого перемещения отслеживаемого объекта в пространстве и времени. В порядке примера, детектор 16 и блок 18 управления могут работать совместно для завершения всех логических процессов (например, обновления сигналов анализа и управления, обработки сигналов) в интервале времени между событиями захвата детектора 16. Такие скорости обработки позволяют осуществлять отслеживание, контроль и управление, по существу, в реальном времени. В порядке неограничительного примера, события захвата детектора могут занимать от приблизительно 1/60 секунды до приблизительно 1/30 секунды, таким образом, генерируя от 30 до 60 кадров в секунду. Детектор 16 и блок 18 управления могут работать для приема, обновления и обработки сигналов между захватами каждого кадра. Однако, в соответствии с некоторыми вариантами осуществления, может использоваться любой интервал между событиями захвата.
[0062] Как только зарегистрирован конкретный рисунок обратного отражения, блок 18 управления может производить определение, коррелирует ли рисунок с сохраненным рисунком, идентифицированным блоком 18 управления и соответствующим конкретному действию, подлежащему осуществлению оборудованием 12 парка развлечений. Например, блок 18 управления может осуществлять сравнение положения, пути или траектории обратно-отражающей метки 24 с сохраненными положениями, путями или траекториями для определения надлежащего управляющего действия для оборудования 12. Дополнительно или альтернативно, как более подробно описано ниже, блок 18 управления может определять, коррелирует ли конкретный рисунок, полученный в конкретный момент времени, с сохраненным рисунком, связанным с конкретным действием, подлежащим осуществлению оборудованием 12 парка развлечений. Кроме того, блок 18 управления может определять, коррелирует ли набор конкретных рисунков, полученных в конкретные моменты времени, с сохраненным изменением рисунка, связанным с конкретным действием, подлежащим осуществлению оборудованием 12 парка развлечений.
[0063] Хотя блок 18 управления может предписывать автоматическое осуществление некоторых действий в парке развлечений вышеизложенным образом, следует отметить, что анализы, аналогичные вышеупомянутым, также можно применять для предотвращения некоторых действий (например, когда оборудование 12 парка блокирует действие или заблокировано от осуществления действия). Например, в случаях, когда транспортное средство аттракциона для катания может автоматически отправляться, блок 18 управления, на основании отслеживания изменений в обратно-отражающих метках 24, может останавливать автоматическое отправление, или даже может препятствовать отправлению оператором аттракциона для катания, пока не будут предприняты дополнительные меры (например, дополнительные подтверждения, что транспортное средство аттракциона для катания готово к отправлению). Такого рода управление также может применяться к другому оборудованию парка развлечений. Например, эффекты пламени, фейерверк или аналогичные эффекты представления могут блокироваться от запуска, могут останавливаться или могут снижаться по интенсивности, вследствие вмешательства блока 18 управления в результате некоторых описанных здесь определений рисунка.
[0064] Описав, в целом, конфигурацию системы 10, следует отметить, что компоновка излучателя 14, детектора 16, блока 18 управления и других признаков может изменяться на основании соображений, зависящих от применения, и того, каким образом блок 18 управления осуществляет оценки на основании электромагнитного излучения от обратно-отражающих меток 24. Согласно варианту осуществления системы 10 отслеживания, представленному на фиг. 1, излучатель 14 и датчик или детектор 16 являются единым элементом, благодаря чему, плоскость работы, связанная с детектором 16, по существу, перекрывается с плоскостью работы, связанной с излучателем 14. Таким образом, детектор 16 находится, по существу, в том же положении, что и излучатель 14, что может быть желательно вследствие обратно-отражательной способности меток 24. Однако, настоящее изобретение не обязано ограничиваться этой конфигурацией. Например, как упомянуто выше, обратное отражение может быть связано с конусом отражения, где наивысшая интенсивность наблюдается в середине отраженного конуса. Соответственно, детектор 16 может располагаться в зоне, в которой отраженный конус обратно-отражающих меток менее интенсивен, чем в его центре, но все же регистрируется детектором 16.
[0065] В порядке неограничительного примера, в некоторых вариантах осуществления, излучатель 14 и детектор 16 могут быть концентрическими. Однако детектор 16 (например, инфракрасная камера) может располагаться в другом положении относительно излучателя 14, который может включать в себя лампу инфракрасного света, один или более диодных излучателей или аналогичный источник. Как показано на фиг. 2, излучатель 14 и детектор 16 являются отдельными и располагаются в разных положениях на внешнем элементе 40 зоны увеселительного аттракциона (например, стене или потолке). В частности, излучатель 14, показанный на фиг. 2, располагается вне окна 42 фасада, содержащего другие компоненты системы 10. Детектор 16, показанный на фиг. 2, располагается на удалении от излучателя 14, но по-прежнему ориентирован для регистрации электромагнитного излучения, отраженного от обратно-отражающей метки 24 и исходящего от излучателя 14.
[0066] В целях иллюстрации, стрелки 44, 46 представляют световой пучок (пучок электромагнитного излучения), испускаемый от излучателя 14 (стрелка 44) в зону 30 регистрации, обратно-отраженный обратно-отражающей меткой 24 на объекте 26 (стрелка 46), и регистрируемый детектором 16. Световой пучок, представленный стрелкой 44, является лишь одним из многочисленных эмиссий электромагнитного излучения (световых пучков), которые заполняют или иначе избирательно освещают зону 30 регистрации, от излучателя 14. Следует отметить, что другие варианты осуществления могут использовать другие компоновки компонентов системы 10 и реализации в разных окружениях в соответствии с настоящим изобретением.
[0067] Рассмотрев работу в целом системы 10 отслеживания для регистрации положения обратно-отражающих меток 24 и/или объектов 32, как показано на фиг. 1, обратимся к более подробному описанию некоторых применений системы 10 отслеживания. Например, может быть желательно отслеживать положения людей в конкретной зоне с использованием раскрытых систем отслеживания. Это может быть полезно, например, для управления очередями в зоне посадки на транспортное средство аттракциона для катания, управления доступом к разным зонам, определения надлежащих моментов, когда могут запускаться эффекты представления, определения надлежащих моментов, когда некоторое автоматизированное оборудование может перемещаться, и также может быть полезно для помощи в осуществлении живого представления (например, блокирования актеров на сцене). Таким образом, в ходе представлений, предполагается, что актеры стоят в конкретных положениях на сцене в некоторые моменты времени. Чтобы гарантировать, что актеры попадают в свои надлежащие положения в правильное время, система 10 отслеживания может быть установлена над сценой и использоваться для отслеживания положений и/или движения всех актеров на сцене. Обратная связь от системы 10 отслеживания может использоваться для оценивания, насколько точно актеры попадают в желаемые участки на сцене.
[0068] Помимо блокирования на сцене, система 10 отслеживания может использоваться в контекстах, которые предусматривают отслеживание и/или оценивание покупателей в магазине или другом коммерческом предприятии. Таким образом, магазин может было оборудован раскрытыми системами 10 отслеживания для определения, где посетители задерживаются в магазине. Вместо запуска эффекта представления, такие системы 10 отслеживания могут использоваться для осуществления контроля за потоком людей в магазине и, таким образом, управления доступностью некоторых предметов, управления потоком перемещения людей и т.д. Например, информация, собранная посредством раскрытых систем 10 отслеживания, может использоваться для идентификации и оценивания, какие прилавки или витрины в магазине наиболее привлекательны, для определения, какие товары наиболее популярны, или для определения, какие зоны магазина, при наличии, переполнены. Эта информация может анализироваться и использоваться, помимо прочего, для улучшения плана магазина, развития продукта и управления скоплениями людей.
[0069] Следует отметить, что возможны другие применения для отслеживания положений людей, объектов, машин и т.д. в зоне, отличной от описанных выше. В настоящее время раскрытые системы 10 отслеживания могут быть выполнены с возможностью идентификации и/или отслеживания положения и перемещения людей и/или объектов в зоне 30 регистрации. Система 10 отслеживания может выполнять это отслеживание несколькими разными способами, которые были представлены выше и более подробно объясняются ниже. Следует отметить, что система 10 отслеживания выполнена с возможностью регистрации положения одного или более людей, одного или более объектов 32, или комбинации разных элементов, в одно и то же время в одной и той же зоне 30 регистрации с использованием единичного излучателя 14, детектора 16 и блока 18 управления. Однако использование нескольких таких излучателей 14, детекторов 16 и блоков 18 управления также укладывается в объем настоящего изобретения. Соответственно, в зоне 30 регистрации может существовать один или более излучателей 14 и один или более детекторов 16. Такие соображения, как тип отслеживания, подлежащего осуществлению, желаемый диапазон отслеживания, для избыточности и т.д., могут, по меньшей мере, частично определять, используются ли множественные или единичный излучатель и/или детектор.
[0070] Например, как упомянуто выше, система 10 отслеживания может быть, в целом, выполнена с возможностью отслеживания цели, движущейся в пространстве и во времени (например, в зоне 30 регистрации по времени). Когда используется единичное регистрирующее устройство (например, детектор 16), система 10 отслеживания может осуществлять контроль за обратно-отраженным электромагнитным излучением с заданной ориентацией для отслеживания человека, объекта и т.д. Поскольку детектор 16 имеет одну-единственную перспективу, такие регистрация и отслеживание, в некоторых вариантах осуществления, могут ограничиваться осуществлением отслеживания в одной-единственной плоскостности перемещения (например, отслеживания в двух пространственных измерениях). Такое отслеживание может использоваться, в порядке примера, в случаях, когда отслеживаемая цель имеет относительно низкое число степеней свободы, например, когда перемещение ограничено ограниченным путем (например, колеей). В одном таком варианте осуществления цель имеет определенную векторную ориентацию.
[0071] С другой стороны, когда используются множественные регистрирующие устройства (например, два или более детекторов 16) для отслеживания цели в пространстве и времени, система 10 отслеживания может осуществлять контроль за обратно-отраженным электромагнитным излучением с множественных ориентаций. Использование этих множественных точек наблюдения позволяет системе 10 отслеживания отслеживать цели, имеющие множественные степени свободы. Другими словами, использование множественных детекторов может обеспечивать как векторную ориентацию, так и дальность для отслеживаемой цели. Этот тип отслеживания может быть особенно полезен в случаях, когда может быть желательно, чтобы перемещение отслеживаемой цели не имело ограничений в пространстве и времени.
[0072] Также может быть желательно иметь множественные детекторы для избыточности в отслеживании. Например, множественные регистрирующие устройства, применяемые к сценариям, где перемещение цели ограничено, или нет, могут повышать надежность отслеживания, осуществляемого системой 10 отслеживания. Использование избыточных детекторов 16 также может повышать точность отслеживания, и может помогать воспрепятствованию геометрическому заграждению цели сложными геометрическими поверхностями, например, извилистыми дорожками, холмами, складчатой одеждой, открывающимися дверями и т.д.
[0073] В соответствии с одним аспектом настоящего изобретения, система 10 отслеживания может отслеживать относительные положения множественных целей (например, людей, объектов, машин), находящихся в зоне 30 регистрации, с использования обратно-отражающих меток 24. Как показано на фиг. 3, обратно-отражающие метки 24 могут располагаться на человеке 70. Дополнительно или альтернативно, метка 24 может располагаться на машине или другом объекте (например, объекте 26). Соответственно, раскрытые здесь методы отслеживания перемещения человека 70 в пространстве и времени также можно применять к перемещению объекта в парке развлечений, либо помимо человека 70, либо в порядке альтернативы человеку 70. В таких вариантах осуществления, метка 24 может располагаться на внешней поверхности объекта 26 (например, корпусе), как показано на фиг. 1.
[0074] Согласно варианту осуществления, проиллюстрированному на фиг. 3, обратно-отражающая метка 24 располагается на внешней поверхности одежды человека. Например, обратно-отражающая метка 24 может применяться как полоска из обратно-отражающей ленты, прикрепленная к нарукавной повязке, наголовной повязке, рубашке, элементе персональной идентификации или к другому изделию. Дополнительно или альтернативно, обратно-отражающая метка 24 может быть, в некоторых вариантах осуществления, нашита на одежду или нанесена на одежду в качестве покрытия. Обратно-отражающая метка 24 может располагаться на одежде человека 70 в положения, доступной пучку 28 электромагнитного излучения, испускаемому излучателем 14. Когда человек 70 ходит по зоне 30 регистрации (в случае объекта 32, объект 32 может перемещаться через зону 30), пучок 28 электромагнитного излучения отражается от обратно-отражающей метки 24 обратно к детектору 16. Детектор 16 осуществляет связь с блоком 18 управления путем отправки сигнала 72 на процессор 20, причем этот сигнал 72 указывает отраженное электромагнитное излучение, регистрируемое детектором 16. Система 10 отслеживания может интерпретировать этот сигнал 72 для отслеживания положения или пути человека 70 (или объекта 32), движущегося по указанной зоне (т.е. отслеживать человека или объект в пространстве и времени). Опять же, в зависимости от количества используемых детекторов 16, блок 18 управления может определять модуль, ориентацию вектора, и смысл перемещения человека и/или объекта на основании принятого обратно-отраженного электромагнитного излучения.
[0075] Отслеживание человека 70 (который также может представлять движущийся объект) схематически проиллюстрировано на фиг. 4. В частности, фиг. 4 демонстрирует последовательность 80 кадров 82, захваченных детектором 16 (например, камерой) в течение периода времени. Как упомянуто выше, множество таких кадров (например, от 30 до 60) может генерироваться каждую секунду в некоторых вариантах осуществления. Следует отметить, что фиг. 4 может не быть фактическим представлением выходных сигналов вырабатываемых системой 10 отслеживания, но она описывается в настоящем документе для облегчения понимания отслеживания и осуществления контроля, осуществляемого блоком 18 управления. Каждый из кадров 82 представляет зону 30 регистрации и положение обратно-отражающей метки 24 в зоне 30. Альтернативно, кадры 82 могут представлять блокировку метки в зоне 30, например, где сетка меток 24 загружается объектом или человеком.
[0076] Как показано, первый кадр 82A включает в себя первый экземпляр обратно-отражающей метки, обозначенный как 24A, имеющий первое положение. По мере того, как последовательность 80 развивается во времени, второй кадр 82B включает в себя второй экземпляр обратно-отражающей метки 24B, смещенный относительно первого экземпляра, и т.д. (таким образом, создавая третий и четвертый экземпляры обратно-отражающей метки 24C и 24D). По истечении некоторого периода времени, блок 18 управления генерирует последовательность 80, где операция генерирования последовательности 80, в целом, представлена стрелкой 84.
[0077] Блок 18 управления может оценивать последовательность 80 несколькими разными способами. В соответствии с проиллюстрированным вариантом осуществления, блок 18 управления может оценивать перемещение человека 70 или объекта 32, оценивая положения метки 24 (или блокировку некоторых меток) по времени. Например, блок 18 управления может получать векторную ориентацию, дальность и смысл, относящиеся к перемещению отслеживаемой цели, в зависимости от количества детекторов 16, используемых для осуществления отслеживания. Таким образом, блок 18 управления можно рассматривать для оценивания составного кадра 86, представляющего перемещение отслеживаемой обратно-отражающей метки 24 (или отслеживаемую блокировку меток 24) по времени в зоне 30 регистрации. Таким образом, составной кадр 86 включает в себя различные экземпляры обратно-отражающей метки 24 (включающие в себя 24A, 24B, 24C, 24D), которые могут анализироваться для определения общего перемещения метки 24 (и, таким образом, человека 70 и/или объекта 26, в любом случае).
[0078] Также, как показано на фиг. 4, этот контроль может осуществляться в отношении некоторых внешних элементов 88, которые могут быть закреплены в зоне 30 регистрации и/или могут быть связаны с отражающими материалами. Блок 18 управления может осуществлять работу не только на основании зарегистрированных положений метки 24, но и на основании экстраполированного перемещения (например, проектируемого пути обратно-отражающей метки 24 через зону 30 регистрации или проектируемых положений преграждения сетки меток) относительно внешних элементов 88.
[0079] Другой способ отслеживания одного или более людей 70 или объектов 32 в зоне схематически проиллюстрирован на фиг. 5. В частности, фиг. 5 представляет вид сверху группы людей 70, стоящих в зоне 30 регистрации. Хотя это не показано, система 10 отслеживания может присутствовать непосредственно над этой зоной 30 регистрации для регистрации положений людей 70 (и других объектов), присутствующих в зоне 30 регистрации (например, для получения вида в плане зоны 30 регистрации). В проиллюстрированном варианте осуществления, обратно-отражающие метки 24 располагаются в сетчатом рисунке 90 на полу 92 зоны 30 регистрации (например, в виде покрытия, кусков ленты, или аналогичным способом присоединения). Обратно-отражающие метки 24 могут располагаться в любом желаемом рисунке (например, сетки, ромбов, линий, кругов, сплошного покрытия и т.д.), который может быть регулярным (например, повторяющимся) рисунком или случайным рисунком.
[0080] Этот сетчатый рисунок 90 может храниться в памяти 22, и участки сетчатого рисунка 90 (например, отдельные метки 24) могут коррелировать с положениями некоторых внешних элементов и элементов парка развлечений (например, оборудованием 12 парка развлечений). Таким образом, положение каждой из меток 24 относительно таких элементов может быть известна. Соответственно, когда метки 24 обратно отражают пучок 28 электромагнитного излучения к детектору 16, положение меток 24, которые являются отражающими, может определяться и/или контролироваться блоком 18 управления.
[0081] Как показано, когда люди 70 или объекты 32 располагаются поверх одной или более обратно-отражающих меток 24 на полу 92, загражденные метки не могут отражать испущенное электромагнитное излучение обратно к детектору 16 над полом 92. Действительно, в соответствии с вариантом осуществления, сетчатый рисунок 90 может включать в себя обратно-отражающие метки 24, разнесенные на расстояние, которое позволяет обнаруживать людей или объекты, располагающиеся на полу 92 (например, блокирующие, по меньшей мере, одну из обратно-отражающих меток 24). Другими словами, расстояние между метками 24 может быть достаточно малым, чтобы объекты или люди могли располагаться поверх, по меньшей мере, одной из обратно-отражающих меток 24.
[0082] В ходе эксплуатации, детектор 16 может регистрировать пучок 28 электромагнитного излучения, обратно отраженный от обратно-отражающих меток 24, не закрытых людьми или объектами, находящимися в зоне 30 регистрации. Как рассмотрено выше, детектор 16 может затем выдавать данные, связанные с этой регистрацией, на блок 18 управления для обработки. Блок 18 управления может осуществлять сравнение зарегистрированного пучка электромагнитного излучения, отраженного от не закрытых обратно-отражающих меток 24 (например, зарегистрированного рисунка), с сохраненными положениями полностью открытого сетчатого рисунка 90 (например, сохраненного рисунка) и/или других известных сетчатых рисунков, полученных в результате блокировки некоторых меток 24. На основании этого сравнения, блок 18 управления может определять, какие метки 24 закрыты, чтобы затем аппроксимировать положения людей 70 или объектов 32 в плоскости пола 92. Действительно, использование сетки, расположенной на полу 92, совместно с единичным детектором 16 позволяет отслеживать перемещение в двух измерениях. Если желательно отслеживание более высокого порядка, можно использовать дополнительные сетки и/или дополнительные детекторы 16. В некоторых вариантах осуществления, на основании положений людей 70 или объектов 32 в зоне 30 регистрации, блок 18 управления может регулировать работу оборудования 12 парка развлечений.
[0083] Процесс испускания пучка 28 электромагнитного излучения, регистрации отраженного электромагнитного излучения от не закрытых обратно-отражающих меток 24 на полу 92, и определения положения людей 70 может многократно осуществляться блоком 18 управления в течение короткого периода для идентификации последовательности положений людей 70 движущихся по полу 92 (для отслеживания движения группы). Действительно, такие процедуры могут осуществляться, по существу, непрерывно для облегчения идентификации пути, проделываемого людьми 70 в зоне 30 регистрации в течение конкретного временного кадра или просто в непрерывной последовательности. Как только положение или путь одного или более из людей 70 зарегистрировано, блок 18 управления может дополнительно анализировать положение или путь для определения, должно ли оборудование 12 осуществлять какие-либо действия.
[0084] Как подробно рассмотрено выше со ссылкой на фиг. 1, блок 18 управления может быть выполнен с возможностью идентификации некоторых объектов, которые, предположительно, пересекают путь пучка 28 электромагнитного излучения в зоне 30 регистрации, в том числе, объектов, которые не помечены обратно-отражающим материалом. Например, как показано на фиг. 6, некоторые варианты осуществления системы 10 отслеживания могут быть сконфигурированы таким образом, что блок 18 управления способен идентифицировать человека 70 (который также призван представлять объект 32), находящегося в зоне 30 регистрации, без использования обратно-отражающих меток 24. Таким образом, блок 18 управления может принимать данные, указывающие электромагнитное излучение, отраженное из зоны 30 регистрации, и блок 18 управления может сравнивать цифровую сигнатуру зарегистрированного излучения с одной или более возможными сигнатурами данных, хранящимися в памяти 22. Таким образом, если сигнатура электромагнитного излучения, отраженного обратно к детектору 16, достаточно точно совпадает с сигнатурой человека 70 или известного объекта 32, то блок 18 управления может определять, что человек 70 или объект 32 находится в зоне 30 регистрации. Например, блок 18 управления может идентифицировать ʺтемные участкиʺ или области, где электромагнитное излучение поглощается, а не отражается, в зоне 30 регистрации. Эти зоны могут иметь геометрию, которую блок 18 управления может анализировать (например, путем сравнения с формами, размерами или другими признаками сохраненных объектов или людей) для идентификации присутствия, положения, размера, формы и т.д., объекта (например, человека 70).
[0085] Из фиг. 1, 2, 3 и 6 следует, что система 10 отслеживания может располагаться в различных положениях для получения разных видов зоны 30 регистрации. Действительно, теперь понятно, что разные положения и комбинации положений одной или более из систем 10 отслеживания (или одного или более элементов системы 10 отслеживания, например, множественных детекторов 16) могут быть желательны для получения некоторых типов информации, относящейся к обратно-отражающим меткам 24 и их блокировке. Например, на фиг. 1, система 10 отслеживания и, в частности, детектор 16, располагается для получения вида в вертикальном разрезе, по меньшей мере, объекта 26, согласующегося с обратно-отражающей меткой 24 и объектом 32. На фиг. 2, детектор 16 располагается для получения вида сверху в перспективе зоны 30 регистрации, который позволяет обнаруживать обратно-отражающие метки 24, расположенные на различных внешних элементах, движущихся объектах или людях. Согласно вариантам осуществления, показанным на фиг. 3 и 6, детектор 16 может располагаться для получения вида в плане зоны 30 регистрации.
[0086] Эти разные виды могут обеспечивать информацию, которая может использоваться блоком 18 управления для конкретных типов анализов и, в некоторых вариантах осуществления, управляющих действий, которые могут зависеть от конкретной установки, в которой они располагаются. Например, согласно фиг. 7, система 10 отслеживания, и, в частности, излучатель 14 и детектор 16, располагаются для получения вида в перспективе человека 70 (или объекта 32) в зоне 30 регистрации. Зона 30 регистрации включает в себя пол 92, а также включает в себя стену 93, на которой располагаются обратно-отражающие метки 24, образующие сетчатый рисунок 90. При этом человек 70 блокирует поднабор меток 24, расположенных на стене 93. Поднабор меток 24 не может освещаться излучателем 14, не может обратно отражать электромагнитное излучение обратно к детектору 16, или и то, и другое, поскольку человек 70 (также призванный представлять объект) располагается между поднабором меток 24 и излучателем 14 и/или детектором 16.
[0087] Сетчатый рисунок 90 на стене 93 может обеспечивать информацию, не обязательно доступную из вида в плане, показанного на фиг. 3 и 6. Например, блокировка обратно-отражающих меток 24 позволяет блоку 18 управления определять рост человека 70, профиль человека 70 или, согласно вариантам осуществления, в которых присутствует объект 32, размер объекта 32, профиль объекта 32 и т.д. Такие определения могут производиться блоком 18 управления для оценивания, отвечает ли человек 70 требованию роста для аттракциона для катания, для оценивания, связан ли человек 70 с одним или более объектами 32 (например, сумками, колясками), и также могут использоваться для отслеживания перемещения человека 70 или объекта 32 через зону 30 регистрации с более высокой степенью точности по сравнению с видом в плане, представленным на фиг. 3 и 6. Таким образом, блок 18 управления способен лучше связывать перемещение, идентифицированное блокировкой меток 24, с конкретным человеком 70, путем определения профиля, роста и т.д. человека. Аналогично, блок 18 управления способен лучше отслеживать перемещение объекта 32 через зону 30 регистрации путем идентификации геометрии объекта 32 и связывания идентифицированного перемещения конкретно с объектом 32. В некоторых вариантах осуществления, отслеживание роста или профиля человека 70 может осуществляться системой 10 отслеживания для того, чтобы блок 18 управления мог обеспечивать рекомендации человеку 70 на основании анализа оцененных роста, профиля и т.д. человека. Аналогичные определения и рекомендации могут обеспечиваться для объектов 32, например, транспортных средств. Например, блок 18 управления может анализировать профиль посетителей на входе в зону очереди для аттракциона для катания. Блок 18 управления может сравнивать общий размер, рост, и т.д. человека 70 со спецификациями аттракциона для катания для предупреждения индивидов или обеспечения подтверждения, что они способны кататься на аттракционе для катания, прежде чем они потратят время в очереди. Аналогично, блок 18 управления может анализировать общий размер, длину, высоту и т.д. транспортного средства для обеспечения рекомендаций по парковке на основании доступного пространства. Дополнительно или альтернативно, блок 18 управления может анализировать общий размер, профиль и т.д. автоматизированного оборудования, прежде чем позволить оборудованию осуществлять конкретную задачу (например, движение через скопление людей).
[0088] Рисунок 90 также может располагаться и на стене 93, и на полу 92. Соответственно, система 10 отслеживания имеет возможность принимать обратно-отраженное электромагнитное излучение от меток 24 на стене 93 и полу 92, что позволяет регистрировать блокировку метки и осуществлять контроль за перемещением в трех измерениях. В частности, стена 93 может обеспечивать информацию в направлении 94 высоты, а пол 92 может обеспечивать информацию в направлении 96 глубины. Информацию направления 94 высоты и информацию направления 96 глубины может коррелировать друг с другом с использованием информации направления 98 ширины, доступной из видов в плане и вертикальном разрезе.
[0089] Действительно, теперь понятно, что если два объекта 32 или человека 70 перекрываются в направлении 98 ширины, они могут, по меньшей мере, частично, разрешаться относительно друг друга с использованием информации, полученной из направления 96 глубины. Кроме того, теперь также понятно, что использование множественных излучателей 14 и детекторов 16 в разных положениях (например, разных положениях в направлении 98 ширины) может обеспечивать разрешение информации роста и профиля в случае потери некоторой информации или затруднения с разрешением при наличии одного-единственного излучателя 14 и детектора 16. В частности, использование одного-единственного излучателя 14 и детектора 16 может приводить к потере некоторой информации при наличии перекрывания между объектами 32 или людьми 70 в направлении 98 ширины (или, в более общем случае, перекрывания в направлении между метками 24 на стене 93 и детектором 16). Однако варианты осуществления, предусматривающие использование множественных (например, по меньшей мере, двух) детекторов 16 и/или излучателей 14 могут приводить к тому, что различные обратно-отражающие рисунки создаются метками 24 и наблюдаются от детекторов 16 и/или излучателей 14, расположенных в разных перспективах. Действительно, поскольку метки 24 являются обратно-отражающими, они будут обратно отражать электромагнитное излучение к источнику электромагнитного излучения, даже когда множественные источники излучают, по существу, одновременно. Таким образом, электромагнитное излучение, испущенное из первого из излучателей 14 с первой перспективы, будет обратно отражается к первому из излучателей 14 метками 24, тогда как электромагнитное излучение, испущенное из второго из излучателей 14 во второй перспективе, будет обратно отражается ко второму из излучателей 14 метками 24, что позволяет блоку 18 управления создавать и осуществлять контроль за множеством наборов информации отслеживания.
[0090] Теперь также понятно, что обратно-отражающие метки 24 на стене 93 и полу 92 могут быть одинаковыми или разными. Действительно, система 10 отслеживания может быть выполнена с возможностью определения, какое электромагнитное излучение отразилось от стены 93, и какое электромагнитное излучение отразилось от пола 92, с использованием направленности обратно-отраженного электромагнитного излучения от стены 93 и пола 92. В других вариантах осуществления, для меток 24 могут использоваться разные материалы, благодаря чему, например, разные длины волны электромагнитного излучения могут отражаться обратно к излучателю 14 и детектору 16 разными материалами. В порядке примера, обратно-отражающие метки 24 на полу 92 и стене 93 могут иметь одинаковые обратно-отражающие элементы, но разные слои, которые действуют для фильтрации или иного поглощения частей испущенного электромагнитного излучения, благодаря чему, электромагнитное излучение, отраженное обратно-отражающими метками 24 на полу 92 и стене 93 имеет характерные и разные длины волны. Поскольку обратно отражаются разные длины волны, детектор 16 может регистрировать эти длины волны и отделять их от внешнего электромагнитного излучения, которое фильтруется фильтрующими элементами в детекторе 16.
[0091] В целях иллюстрации на фиг. 8 изображены увеличенные виды в разрезе иллюстративных обратно-отражающих меток 24, расположенных на полу 92 и стене 93 в зоне 30 регистрации. Каждая из меток 24 на полу 92 и стене 93 включают в себя отражающий слой 96 и слой 98 обратно-отражающего материала, которые могут быть одинаковыми или разными для пола 92 и стены 93. В проиллюстрированном варианте осуществления они одинаковы. В ходе эксплуатации, электромагнитное излучение, испущенное излучателем 14, может пересекать пропускающее покрытие 99, прежде чем достигнет слоя 98 обратно-отражающего материала. Соответственно, пропускающее покрытие 99 может использоваться для регулировки длин волны электромагнитного излучения, обратно отраженного метками. На фиг. 8, метки 24 на полу 92 включают в себя первое пропускающее покрытие 99A, которое отличается от второго пропускающего покрытия 99B в метках 24 на стене 93. В некоторых вариантах осуществления, разные оптические свойства первого и второго пропускающих покрытий 99A, 99B может приводить к различию в ширине полосы электромагнитного излучения, отражающегося метками 24 на полу 92 и метками 24 на стене 93. Хотя они представлены в контексте расположения на полу 92 и стене 93, следует отметить, что метки 24, имеющие разные оптические свойства, могут использоваться на разнообразных элементах в парке развлечений, например, на людях и внешних элементах, людях и движущемся оборудовании и т.д., для облегчения разделения для обработки и осуществления контроля за блоком 18 управления.
[0092] Любой один из вышеизложенных методов или их комбинация может использоваться для осуществления контроля за единичного объекта или человека или множественных объектов или людей. Действительно, в настоящее время понятно, что комбинация множественных сеток обратно-отражающих меток (например, на полу 92 и стене 93 как изложено выше), или комбинация одной или более сеток обратно-отражающих меток и одной или более отслеживаемых обратно-отражающих меток 24, закрепленных на подвижном объекте или человеке, может использоваться для обеспечения трехмерного отслеживания, даже когда используется один-единственный детектор 16. Кроме того, также понятно, что использование множественных обратно-отражающих меток 24 на одном и том же человеке или объекте позволяет системе 10 отслеживания отслеживать и положение, и ориентацию.
[0093] В связи с этим, фиг. 9A демонстрирует вариант осуществления объекта 26, имеющего множественные обратно-отражающие метки 24, расположенные на разных торцах объекта 26. В частности, в проиллюстрированном варианте осуществления, обратно-отражающие метки 24 располагаются в три разных точках объекта 26, соответствующих трем ортогональным направлениям (например, осям X, Y и Z) объекта 26. Однако следует отметить, что в других вариантах осуществления могут использоваться другие схемы расположения множественных обратно-отражающих меток 24. Кроме того, отслеживание, изображенное на фиг. 9A, может осуществляться, как проиллюстрировано в целом, или также с использованием сетки обратно-отражающих меток 24, как показано на фиг. 7.
[0094] Как упомянуто выше, система 10 отслеживания может включать в себя множественные детекторы 16, выполненные с возможностью регистрации электромагнитного излучения, которое отражается, например, от объекта 26. Каждая из обратно-отражающих меток 24, расположенных на объекте 26, может обратно отражать испущенный пучок 28 электромагнитного излучения на конкретной, заранее определенной частоте электромагнитного спектра пучка 28 электромагнитного излучения. Таким образом, обратно-отражающие метки 24 могут обратно отражать одни и те же или разные участки электромагнитного спектра, как, в целом, изложено выше со ссылкой на фиг. 8.
[0095] Блок 18 управления выполнен с возможностью регистрации и различения электромагнитного излучения, отраженного на этих конкретных частотах, и, таким образом, отслеживания движения каждой из отдельных обратно-отражающих меток 24. В частности, блок 18 управления может анализировать зарегистрированные положения отдельных обратно-отражающих меток 24 для отслеживания крена (например, поворота вокруг оси Y), тангажа (например, поворота вокруг оси X) и рыскания (например, поворота вокруг оси Z) объекта 26. Таким образом, вместо того, чтобы определять только положение объекта 26 в пространстве относительно конкретной системы координат (например, заданной зоной 30 регистрации или детектором 16), блок 18 управления может определять ориентацию объекта 26 в системе координат, что позволяет блоку 18 управления осуществлять улучшенные отслеживание и анализы перемещения объекта 26 в пространстве и времени через зону 30 регистрации. Например, блок 18 управления может осуществлять прогностические анализы для оценивания будущего положения объекта 26 в зоне 30 регистрации, что может обеспечивать улучшенное управление перемещением объекта 26 (например, во избежание столкновений, для прокладывания конкретного пути через зону).
[0096] В некоторых вариантах осуществления, например, когда объект 26 является моторизованным объектом, система 10 отслеживания может отслеживать положение и ориентацию объекта 26 (например, транспортного средства аттракциона для катания, автомата, радиоуправляемого транспортного средства без водителя) и управлять объектом 26 в его движении вдоль пути заранее определенным образом. Блок 18 управления может, дополнительно или альтернативно, сравнивать результаты с предполагаемыми положением и ориентацией объекта 26, например, для определения, следует ли управлять объектом 26 для регулировки его работы, и/или определять, работает ли объект 26 надлежащим образом или нуждается в каком-либо обслуживании. Кроме того, оцененные положение и ориентация объекта 26, определенные посредством системы 10 отслеживания, могут использоваться для инициирования действий (в том числе, предотвращения некоторых действий) другого оборудования 12 парка развлечений (например, эффектов представления). В порядке одного примера, объектом 26 может быть транспортное средство аттракциона для катания, и оборудованием 12 парка развлечений может быть эффект представления. В этом примере, может быть желательно запускать только оборудование 12 парка развлечений, когда объект 26 находится в предполагаемой положения и/или ориентации.
[0097] В продолжении, каким образом может осуществляться отслеживание в трех пространственных измерениях, фиг. 9B изображает пример объекта, имеющего первую метку 24A, вторую метку 24B и третью метку 24C, расположенные в положениях, аналогичных представленным на фиг. 9A. Однако, с перспективы одного-единственного детектора 16, детектор 16 может наблюдать двухмерное представление объекта 16 и метки 24A, 24B, 24C. С этой первой перспективы (например, в виде сверху или снизу), блок 18 управления может определять, что первая и вторая метки 24A, 24B разделены первым наблюдаемым расстоянием d1, первая и третья метки 24A, 24C разделены вторым наблюдаемым расстоянием d2, и вторая и третья метки 24B, 24C разделены третьим наблюдаемым расстоянием d3. Блок 18 управления может сравнивать эти расстояния с известными или калиброванными значениями для оценивания ориентации объекта 26 в трех пространственных измерениях.
[0098] Переходя к фиг. 9C, когда объект 26 вращается, детектор 16 (и, соответственно, блок 18 управления) может обнаруживать, что видимая форма объекта 26 отличается. Однако блок 18 управления также может определять, что первая и вторая метки 24A, 24B разделены отрегулированным первым наблюдаемым расстоянием d1ʹ, первая и третья метки 24A, 24C разделены отрегулированным вторым наблюдаемым расстоянием d2ʹ, и вторая и третья метки 24B, 24C разделены отрегулированным третьим наблюдаемым расстоянием d3ʹ. Блок 18 управления может определять различие между расстояниями, зарегистрированными в ориентации, показанной на фиг. 9B, и расстояниями, зарегистрированными в ориентации, показанной на фиг. 9C, для определения, как изменилась ориентация объекта 26, чтобы затем определять ориентацию объекта 26. Дополнительно или альтернативно, блок 18 управления может сравнивать отрегулированные наблюдаемые расстояния d1ʹ, d2ʹ, d3ʹ, обусловленные поворотом объекта 26, с сохраненными значениями для оценивания ориентации объекта 26 в трех пространственных измерениях или для дополнительного уточнения обновления до ориентации, определенной на основании изменений между расстояниями, показанными на фиг. 9B и 9C.
[0099] Как изложено выше, настоящие варианты осуществления относятся, помимо прочего, к использованию раскрытой системы 10 отслеживания для отслеживания объектов и/или людей в окружающей среде парка развлечений. В результате этого отслеживания, блок 18 управления может, в некоторых вариантах осуществления, предписывать осуществлять некоторые автоматизированные функции в различных подсистемах парка развлечений. Соответственно описав работу в целом раскрытой системы 10 отслеживания, перейдем к более конкретным вариантам осуществления операций отслеживания и управления, описанным ниже для облегчения понимания некоторых аспектов настоящего изобретения.
[00100] На фиг. 10, вариант осуществления способа 100 осуществления контроля за изменениями в отраженном электромагнитном излучении для отслеживания перемещения цели и управления оборудование парка развлечений в результате этого осуществления контроля проиллюстрирован в виде блок-схемы операций. В частности, способ 100 включает в себя использование одного или более излучателей 14 (например, излучающей подсистемы) для заполнения (блок 102) зоны 30 регистрации электромагнитным излучением (например, пучком 28 электромагнитного излучения) с использованием излучающей подсистемы. Например, блок 18 управления может предписывать одному или более излучателям 14 время от времени или, по существу, непрерывно заполнять зону 30 регистрации испущенным электромагнитным излучением. Опять же, электромагнитное излучение может иметь любую подходящую длину волны, которая может обратно отражаться обратно-отражающими метками 24. Они включают в себя, но без ограничения, ультрафиолетовые, инфракрасные и видимые длины волны электромагнитного спектра. Очевидно, что разные излучатели 14, и, в некоторых вариантах осуществления, разные метки 24, могут использовать разные длины волны электромагнитного излучения для облегчения дифференциации различных элементов в зоне 30.
[00101] После заполнения зоны 30 регистрации электромагнитным излучением в соответствии с действиями, в целом, представленными блоком 102, способ 100 переходит к регистрации (блок 104) электромагнитного излучения, отраженного от одного или более элементов в зоне 30 регистрации (например, обратно-отражающих меток 24). Регистрация может осуществляться с помощью одного или более детекторов 16, которые могут располагаться относительно излучателя 14, как, в целом, изложено выше со ссылкой на фиг. 1 и 2. Как описано выше и более подробно изложено ниже, элементы, которые осуществляют регистрацию, могут представлять собой любой надлежащий элемент, способный и, в частности, выполненный с возможностью захватывать обратно-отраженное электромагнитное излучение и обуславливать корреляцию захваченного обратно-отраженного электромагнитного излучения с областью детектора 16 таким образом, что информация, передаваемая от детектора 16 на блок 18 управления, содержит информацию положения, указывающую, какие из меток 24 отражают электромагнитное излучение к детектору 16. В порядке одного конкретного, но неограничительного примера, один или более детекторов 16 (например, присутствующих в качестве подсистемы регистрации) может включать в себя устройства с зарядовой связью в оптической камере или аналогичный элемент.
[00102] Как описано выше, в ходе работы системы 10 отслеживания, и пока люди 70 и/или объекты 26, 32 присутствуют в зоне 30 регистрации, можно предположить, что изменения в отраженном электромагнитном излучении будут происходить. Эти изменения можно отслеживать (блок 106) с использованием комбинации одного или более детекторов 16 и процедур, осуществляемых схемой обработки блока 18 управления. В порядке одного примера, отслеживание изменений в отраженном электромагнитном излучении в соответствии с действиями, в целом, представленными блоком 106, может включать в себя контроль за изменениями в рисунках, отраженных от сетки, в течение некоторого периода времени, контроль за изменениями в спектральных сигнатурах, потенциально обусловленных некоторыми поглощающими и/или диффузно или зеркально отражающими элементами, присутствующими в зоне 30 регистрации, или контроль за некоторыми движущимися обратно-отражающими элементами. Как описано ниже, блок 18 управления может быть выполнен с возможностью осуществления некоторых типов отслеживания изменений отражения в зависимости от характера управления, подлежащего осуществлению в окружающей среде конкретного аттракциона парка развлечений.
[00103] По существу, одновременно или вскоре после отслеживания изменений в отраженном электромагнитном излучении в соответствии с действиями, в целом, представленными блоком 106, блоком 18 управления может оценивать (блок 108) некоторую информацию в результате этих изменений. В соответствии с одним аспектом настоящего изобретения, оцененная информация может включать в себя информацию, относящуюся к одному или более индивидам (например, посетителям парка развлечений, сотрудникам парка развлечений), чтобы блок 18 управления мог осуществлять контроль за перемещением и расположением различных индивидов и/или делать определения в отношении того, правильно ли человек располагается относительно некоторых элементов парка развлечений. В соответствии с другим аспектом настоящего изобретения, информация, оцененная блоком 18 управления, может включать в себя информацию, относящуюся к объектам 26, 32, которые могут быть внешними объектами, движущимися объектами, оборудованием 12 парка развлечений или любым другим устройством, предметом или другим элементом, присутствующим в зоне 30 регистрации. Кроме того, детали, касающиеся того, каким образом можно оценивать информацию, более подробно описаны ниже со ссылкой на конкретные примеры оборудования парка развлечений, управляемого, по меньшей мере, частично блоком 18 управления.
[00104] Как показано, способ 100 также включает в себя управление (блок 110) оборудованием парка развлечений на основании информации (например, контролируемого и анализируемого перемещения людей и/или объектов), оцененной в соответствии с действиями, в целом, представленными блоком 108. Следует отметить, что это управление может осуществляться совместно с одновременным отслеживанием и оцениванием для того, чтобы блок 18 мог управлять осуществлением многих из этапов, изложенных в способе 100 на, по существу, непрерывной основе и в реальном времени (например, порядка скорости захвата детектора 16), при необходимости. Кроме того, оборудование парка развлечений, управляемое в соответствии с действиями, в целом, представленными блоком 110, может включать в себя автоматизированное оборудование, например, транспортные средства аттракциона для катания, проходы для доступа, торговые киоски, информационные дисплеи, или любое другое активируемое устройство парка развлечений. В порядке другого примера, блок 18 управления может управлять некоторыми эффектами представления, например, зажиганием пламени или фейерверка в результате отслеживания и оценивания, осуществляемых в соответствии со способом 100. Дополнительные детали, относящиеся к некоторым из этих конкретных примеров, более подробно описаны ниже.
[00105] Согласно более частному аспекту настоящего изобретения, настоящие варианты осуществления относятся к отслеживанию некоторых объектов 26, 32 и людей 70 в зоне аттракциона парка развлечений. В некоторых вариантах осуществления, оборудованием парка можно управлять на основании этой информации. Оборудование парка развлечений, управляемое в соответствии с настоящими вариантами осуществления, может включать в себя, в порядке примера, автоматы, автоматизированные транспортные средства, радиоуправляемые транспортные средства без водителя, оборудование для представлений (например, пламя, фейерверк) и т.д. В соответствии с этим аспектом, фиг. 11 демонстрирует вариант осуществления способа 120 осуществления контроля за рисунками отражения для отслеживания автоматизированного оборудования парка развлечений и управления им в результате осуществления контроля за любым или обоими людьми в зоне парка развлечений.
[00106] Как показано, способ 120 включает в себя контроль (блок 122) за рисунком отражения. Контроль, осуществляемый в соответствии с действиями, в общем, представленными блоком 122, можно рассматривать как осуществляемый с использованием системы 10 отслеживания, либо отдельно, либо совместно с другими признаками системы управления парка развлечений. Для облегчения рассмотрения, изложенное ниже изобретение может относиться к система управления, соединенной с возможностью связи с несколькими разными устройствами, включающими в себя систему 10 отслеживания, а также оборудование парка развлечений, подлежащее управлению.
[00107] Контроль за рисунком отражения в соответствии с блоком 122 может включать в себя контроль за несколькими разными элементами вышеописанным образом со ссылкой на фиг. 3-9. Соответственно, контроль, осуществляемый в соответствии с блоком 122, может включать в себя контроль за рисунком, генерируемым в течение времени меткой, отслеживаемой в зоне 30 регистрации, или может включать в себя контроль за рисунком отражения, генерируемым в любой момент времени множеством обратно-отражающих меток 24, расположенных в зоне 30 регистрации (например, сетки), или комбинацию этих методов. Кроме того, контроль, осуществляемый в соответствии с блоком 122, может не предусматривать использование меток 24, например, в случаях, когда система 10 отслеживания используется для отслеживания зеркального и/или диффузного отражения. В некоторых вариантах осуществления, контроль за комбинацией этих рисунков можно осуществлять в соответствии с блоком 122, например, когда одна или более обратно-отражающих меток 24 располагается на человеке 70, тогда как другие обратно-отражающие метки 24 располагаются на других объектах 32, стене 93, полу 92 или любом другом внешнем элементе в зоне 30 регистрации.
[00108] Способ 120 также включает в себя определение (блок 124) различий между зарегистрированными рисунками отражения и сохраненными рисунками отражения. Например, зарегистрированный рисунок можно рассматривать как рисунок, генерируемый либо на любом одном экземпляре (например, с использованием сетки), либо в течение времени единичной или множественными отслеживаемыми обратно-отражающими метками 24. Сохраненные рисунки можно рассматривать как представляющие рисунки, сохраненные в памяти 22 блока 18 управления, которые могут коррелировать с разными типами информации, например, поведенческой информацией, некоторыми типами перемещения, ориентациями и/или положениями, ростом или другой геометрической информацией и т.п. В одном варианте осуществления, блок 18 управления может определять различия между зарегистрированным рисунком отражения и сохраненным рисунком отражения для дополнительного определения, коррелирует ли зарегистрированный рисунок с конкретным управляющим действием, связанным с сохраненным рисунком, либо на основании только этой информации, либо, когда информация рассматривается совместно с дополнительной априорной информацией (например, заранее известного желаемого пути перемещения через парк развлечений, заранее известных размера и формы объекта 26, 32).
[00109] Способ 120 также может включать в себя использование идентифицированной положения для предписания запуска (в том числе, предотвращения) автоматизированного оборудования парка (блок 128). Например, идентифицированное положение может предписывать блоку 18 управления запускать эффект представления, регулировать рабочий параметр транспортного средства аттракциона для катания, регулировать ориентацию, скорость и т.д. моторизованного объекта (например, UAV) или аналогичные действия. Кроме того, когда некоторые эффекты представления связаны с управляемым объектом (например, управляемым транспортным средством аттракциона для катания), эффекты представления могут запускаться, по меньшей мере, частично, на основании положения, ориентации, скорости и т.д. управляемого объекта.
[00110] Иллюстративный вариант осуществления системы 140 аттракционов и управления парка развлечений, которая может осуществлять весь или часть способа 120, изображен на фиг. 12. В частности, система 140, показанная на фиг. 12, включает в себя систему 142 управления, которая может включать в себя схему обработки, выполненную с возможностью осуществления функций, специфичных для конкретного аттракциона парк и координирования этих действий с системой 10 отслеживания. Действительно, как показано, система 142 управления может включать в себя блок 18 управления. Как также проиллюстрировано, система 142 управления соединена с возможностью связи с излучающей подсистемой 144, которая включает в себя один или более излучателей 14, и подсистеме 146 регистрации, которая включает в себя один или более детекторов 16.
[00111] Используя информацию, полученную от подсистемы 146 регистрации, а также информацию процедур и ссылок, хранящуюся в схеме обработки блока 18 управления, система 142 управления может отслеживать, и, в некоторых вариантах осуществления, управлять автоматизированным оборудованием 12 аттракциона, к которому она коммуникативно и/или оперативно подключена. Конкретный вариант осуществления системы 140 аттракционов и управления парка развлечений, представленной на фиг. 12, выполнен с возможностью осуществления различных действий осуществления контроля за и управления, по меньшей мере, частично на основании осуществления контроля за рисунком отражения, полученных из обратно-отражающих меток 24, расположенных на статических и/или движущихся элементах зоны 30 регистрации. В порядке примера, зона 30 регистрации может представлять зону аттракциона парка развлечений, где автоматизированные мобильные объекты выполнены с возможностью перемещения по зоне аттракциона в увеселительных целях, в целях интерактивности и т.д. Работа оборудования 12 аттракциона более подробно описана ниже.
[00112] В конкретном варианте осуществления, представленном на фиг. 12, обратно-отражающие метки 24 можно рассматривать как разделенные на первый поднабор 148 и второй поднабор 150. Каждая метка 24 первого поднабора 148 находится на расстоянии от оборудования 12 аттракциона, меньшем или равном пороговому расстоянию от оборудования 12 аттракциона. Действительно, первый поднабор 148 обратно-отражающих меток 24 можно рассматривать для представления области близости оборудования 12 аттракциона, в том смысле, что любой объект или человек, расположенный поверх одной или более обратно-отражающих меток 24 первого поднабора 148 может рассматриваться как расположенный в непосредственной близости к оборудованию 12 аттракциона. С другой стороны, метки 24 второго поднабора 150 находится за пределами заранее определенного расстояния, задающего первый поднабор 148. Соответственно, второй поднабор 150 меток 24 можно рассматривать как находящийся за пределами (например, вне) границы 152 близости, связанной с оборудованием 12 аттракциона. Поэтому любой объект или человек, расположенный поверх второго поднабора 150 может рассматриваться как не находящийся в непосредственной близости к оборудованию 12 аттракциона.
[00113] В соответствии с аспектом настоящего изобретения, границу 152 близости можно определять на основании конкретной конфигурации оборудования 12 аттракциона. Например, если оборудование 12 аттракциона является моторизованным или подвижным объектом, граница 152 близости может перемещаться с оборудованием аттракциона. Кроме того, степень контроля оборудования 12 аттракциона (например, способность осуществлять тонкое управление перемещением оборудования 12 аттракциона) также может, по меньшей мере, частично определять расстояние границы 152 близости от оборудования 12 аттракциона.
[00114] В ходе эксплуатации, система 142 управления может осуществлять контроль, с использованием излучающей подсистемы 144 и подсистемы 146 регистрации, блокировку (преграждение) некоторых из обратно-отражающих меток 24. В порядке одного примера, система 142 управления может осуществлять контроль за первым поднабором 148 меток 24 и, в результате любой идентификации, что одна или более из меток 24 первого поднабора 148 блокируется объектом или человеком, может предписывать запуск (например, движение) оборудования 12 аттракциона. Этот запуск может, дополнительно или альтернативно, быть запуском эффекта представления, запуском автоматизированного прохода или аналогичным действием. Однако запуск оборудования 12 аттракциона не обязательно означает запуск увеселительного элемента. Например, запуск оборудования 12 аттракциона, в ряде случаев, может предписывать активацию некоторых предохранителей, которые препятствуют некоторым действиям оборудованием 12 аттракциона. Одним примером такого управляющего действия может быть предотвращение перемещения оборудования 12 аттракциона (например, предотвращение перемещения робота). Например, как показано на фиг. 12, оборудование 12 аттракциона может включать в себя или быть связано с системой 154 активации, которая может включать в себя различные электромеханические приводы, тормоза, роторы, насосы, реактивные движительные системы или любую другую систему, способную создавать движущую силу для перемещения оборудования 12 аттракциона через зону 30 регистрации.
[00115] Оборудование 12 аттракциона может, в некоторых вариантах осуществления, включать в себя некоторые типы схемы, которая облегчает связь и обработку. Например, хотя оборудование 12 аттракциона показано как осуществляющее связь с системой 142 управления по линии 156 связи, связь между этими элементами может быть проводной или беспроводной. Соответственно, в некоторых вариантах осуществления, оборудование 12 аттракциона может включать в себя, например, приемопередатчик 158, выполненный с возможностью осуществлять передачу и прием сигналов от и на оборудование 12 аттракциона, соответственно. Оборудование 12 аттракциона также может включать в себя схему обработки, выполненную с возможностью обработки входных сигналов и выполнения инструкций в результате этой обработки. Схема обработки проиллюстрирована как включающая в себя один или более процессоров 160 и один или более блоков 162 памяти.
[00116] В порядке примера, система 142 управления может передавать информацию положения, ориентации и/или скорости и инструкции на оборудование 12 аттракциона с помощью приемопередатчика 158 (и аппаратуры связи, связанной с системой 142 управления), и оборудование 12 аттракциона может обрабатывать эту информацию и инструкции для осуществления регулировок положения, ориентации и/или скорости с использованием системы 154 активации.
[00117] Как изложено выше, раскрытая здесь система 10 отслеживания может использоваться для отслеживания одной или нескольких целей в зоне 30 регистрации, включающей в себя несколько людей 70 и несколько объектов 26, 32 по отдельности и связанных друг с другом и с оборудованием 12 парка развлечений. Опять же, один или более излучателей 14, один или более детекторов 16 и один или более блоков 18 управления можно использовать совместно друг с другом и совместно с системой 142 управления для осуществления такого отслеживания. Фиг. 13 схематически иллюстрирует вид сверху варианта осуществления зоны 30 регистрации, включающей в себя пол 92 с вариантом осуществления нанесенной на нее сетки 90 (см., например, фиг. 5 и 7). В частности, фиг. 13 схематически иллюстрирует, каким образом система 10 отслеживания отслеживает положение и перемещение как машин 170 (объектов 26, 32), так и людей 70 в зоне 30 регистрации. Машины 170 можно рассматривать для представления конкретного варианта осуществления оборудования 12 парка развлечений. Для наглядности, люди 70 изображены кружками, тогда как машины 170 изображены многоугольниками.
[00118] Отслеживание, схематически представленное на фиг. 13, может использоваться в зонах, где люди 70, предположительно, взаимодействуют с машинами 170 или находятся в непосредственной близости к ним, например, пола склада или фабрики, или увеселительного аттракциона с элементами и оборудованием интерактивного представления. Например, в представлении парада, различные роботы могут перемещаться по увеселительной зоне, по меньшей мере, часть которой является зоной 30 регистрации. Люди 70, наблюдающие парад, также могут находиться в зоне 30 регистрации. Аналогично, в фабричной установке, люди 70 могут перемещаться по полу 92, несмотря на присутствие машин 170.
[00119] В типичной парадной или аналогичной установке, люди будут оставаться позади физического барьера, который препятствует машинам 170 и/или людям 70 приближаться друг к другу. Однако теперь понятно, что может быть желательно устранять физические барьеры между людьми 70 и движущимся оборудованием 170. Теперь также понятно, что барьер расстояния может использоваться для замены физического барьера, чтобы машины 170 и система 142 управления могли своевременно реагировать, чтобы быть столь же эффективным, как физический барьер.
[00120] Теперь также понятно, что крупные физические барьеры между машинами 170 и людьми 70 могут становиться узкими местами для потока (например, движения людей и/или машин). В соответствии с вариантом осуществления настоящего изобретения, система 142 управления может использовать встроенные причины представления (например, причины, привязанные к нормальному ходу увеселительного представления), чтобы иметь конкретный объем пространства, когда машина 170 осуществляет быстрые, сложные перемещения, и затем позволять контактировать в другие моменты времени, когда машины 170 находятся в состоянии покоя.
[00121] В альтернативной установке, люди 70 могут работать совместно с машинами 170 (например, роботами) в фабричной установке для осуществления некоторых задач. В этом случае, зона 30 регистрации будет рассматриваться для представления, например, пола фабрики. Обычно, оборудование и другое оборудование будет, по меньшей мере, частично управляться оператором-человеком, например, для защиты от отказов. Теперь понятно, что настоящие варианты осуществления может использоваться для снижения опоры на операторов-людей для управления оборудованием, что позволяет повысить эффективность, например, процессов производства, процессов хранения и пр.
[00122] В проиллюстрированном варианте осуществления, система 10 отслеживания выполнена с возможностью отслеживания перемещения и положения людей 70 и машин 170, и функционирует, чтобы действовать как все или часть защиты машины, которая предохраняет машины 170 от столкновения с людьми 70 в зоне 30 регистрации. Чтобы действовать как система защиты машины, система 10 отслеживания может быть выполнена с возможностью определения присутствия и отслеживания положения людей 70 и машин 170 на полу 92, и оценивания их положений относительно друг друга. В проиллюстрированном варианте осуществления, например, зона 30 регистрации включает в себя сетчатый рисунок 90 обратно-отражающих меток 24, как подробно описано выше со ссылкой на фиг. 5 и 7. Блок 18 управления может, например, оценивать преграждение обратно-отражающих меток 24, сравнивая зарегистрированные на данный момент отражающие рисунки с сохраненными рисунками для определения, является ли преграждение характеристикой одного или группы людей 70 или характеристикой одной или группы машин 170. Например, блок 18 управления может оценивать геометрию элемента, обуславливающего преграждение некоторых обратно-отражающих меток 24, и определять, коррелирует ли геометрия более точно с человеком 70 или машиной 170 (или их группами).
[00123] Хотя проиллюстрированный вариант осуществления включает в себя обратно-отражающие метки 24, размещенные в рисунке на полу 92, другие варианты осуществления могут использовать разные способы регистрации присутствия людей 70 и машин 170, движущихся по полу 92. Например, обратно-отражающие метки 24 могут располагаться на одежде людей 70 (см., например, фиг. 3), или система 10 отслеживания может быть выполнена с возможностью идентификации и определения положения людей 70 и/или машин 170 вовсе без использования обратно-отражающих меток 24, что рассмотрено со ссылкой на фиг. 5.
[00124] Система 10 отслеживания может выдавать сигналы управления на различные машины 170, которые действуют на полу на основании зарегистрированных положений и перемещений людей 70 на полу (например, на основании модуля вектора, ориентации вектора и/или смысла вектора перемещения). В порядке одного примера, машины 170 могут принимать сигналы идти/не идти от системы 142 управления (например, блок 18 управления системы 10 отслеживания). Таким образом, машины 170 могут действовать для перемещения вдоль некоторых заранее определенных траекторий и осуществлять желаемые функции согласно заранее запрограммированной процедуре, хранящейся в памяти 162 (см. фиг. 12). Когда система 10 отслеживания обнаруживает, что человек 70 или другая машина 170 намеревается пересечь путь одной из этих машин 170, система отслеживания может отправлять на машину 170 сигнал ʺне идтиʺ, предписывающий машине 170 останавливать свою процедуру и ждать, пока снова не поступит сигнал "идти" (например, остается неподвижной). Когда человек 70 не находится на пути машины 170, блок 18 управления может отправить сигнал "идти", предписывающий машине 170 продолжать осуществление предусмотренной операции (например, возобновлять движение). В других вариантах осуществления, машины 170 могут принимать конкретные динамические инструкции от системы 142 управления (например, блока 18 управления) на основании зарегистрированных положений и перемещений людей 70 на полу. Например, система 10 отслеживания может предлагать машинам 170 переключаться с одной операции на другую или перенаправлять свою траекторию по полу 92 в соответствии с положениями людей 70, зарегистрированных системой 10 отслеживания.
[00125] Как также проиллюстрировано, некоторые из обратно-отражающих меток 24 могут располагаться на машинах 170 для обеспечения дополнительных функциональных возможностей и информации отслеживания. Например, комбинация информации преграждения сетка и информации отслеживания, относящейся к движущимся обратно-отражающим меткам 24 на машинах 170, может предоставлять возможность более высокие степени свободы перемещения для машин 170, а также более высокое управление их движением системой 142 управления. В порядке одного примера, обратно-отражающие метки 24 на машинах 170 могут быть выполнены с возможностью отражения пучка 28 электромагнитного излучения (или другого электромагнитного излучения) обратно к детектору 16 (или группе детекторов 16) на другой частоте, чем частота обратно-отражающих меток 24, размещенных на полу, использующих разные обратно-отражающие элементы, разные покрытия и т.д.
[00126] Как изложено выше со ссылкой на фиг. 12, система 10 отслеживания может осуществлять контроль за положением людей 70 и/или объектов 26, 32 относительно некоторого оборудования 12 аттракциона, и может устанавливать границу 152 близости относительно оборудования 12 аттракциона, которое определяет, например, нужно ли осуществлять некоторые управляющие действия. Как показано на фиг. 14, несколько таких границ близости, проиллюстрированных как граничные области 180, может применяться системой 10 отслеживания вокруг одной или более машин 170 на полу 92. Каждая из граничных областей 180 может распространяться на некоторое расстояние от внешнего периметра соответствующей одной из машин 170, которые отслеживаются системой 10 отслеживания. В соответствии с этим аспектом настоящего изобретения, теперь понятно, что граничные области 180 могут, в некоторых вариантах осуществления, полностью заменять физические границы между людьми 70 и автоматизированным оборудованием 170 для улучшения интерактивности между людьми 70 и машинами 170.
[00127] В соответствии с некоторыми вариантами осуществления, граничные области 180 можно задать относительно зарегистрированных положений обратно-отражающих меток 24, расположенных на одной из машин 170. Таким образом, для каждой машины 170, одну граничную область 180 можно задать относительно обратно-отражающих меток 24, расположенных на той же машине 170. Дополнительно или альтернативно, граничные области 180 можно задать расстоянием относительно зарегистрированных границ машины 170, которые можно различать на основании преграждения сетчатого рисунка 90. Действительно, вместо конкретного расстояния, которое измеряется в метрах, например, система 10 отслеживания может задавать граничную область 180, проходящую от машин 170 на некоторое количество обратно-отражающих меток 24 сетки 90.
[00128] Система 10 отслеживания может осуществлять контроль за граничной областью 180 каждой из машин 170, и когда один из людей 70 или другая машина 170 проникает в граничную область 180, блок 18 управления может выдавать на машину 170 сигналы управления, которые могут предписывать машине 170 регулировать свое движение (например, останавливать, перенаправлять). В некоторых вариантах осуществления, разные диапазоны, формы или расстояния граничных областей 180, проходящих от машин 170, можно применять к каждой из машин 170, расположенных на полу 92, например, на основании их размера, формы, возможностей маневрирования и т.д. Однако, в других вариантах осуществления, одно и то же расстояние граничных областей 180, проходящих от машин 170, может применяться ко всем машинам 170 на полу. В дополнительных вариантах осуществления, граничные области 180 могут применяться как к машинам 170, так и к людям 70, благодаря чему, когда граничная область 180 одной из машин 170 пересекает граничную область 180 одного из людей 70, блок 18 управления отправляет сигналы управления на машину 170 для переключения или прекращения работы (например, перемещения) машины.
[00129] Как упомянуто выше со ссылкой на фиг. 9A, использование сетки 90 совместно с единичным одним из детекторов 16 может, в некоторых вариантах осуществления, ограничивать способность системы 10 отслеживания отслеживать и управлять перемещением объекта в более чем двух пространственных измерениях. Однако использование нескольких детекторов 16 и/или использование сеток 90, расположенных на дополнительных элементах (например, стенах 93), и/или обратно-отражающих меток 24, расположенных на машинах 170, может предоставлять возможность системе 10 отслеживания осуществлять контроль и управлять перемещением машин 170 в трех пространственных измерениях. Например, согласно вариантам осуществления, где машины 170 способны перемещаться как в плоскости пола 92, так и поперек плоскости пола 92 (например, вверх), система 10 отслеживания может предписывать машинам 170 перемещаться в плоскости пола 92, поперек плоскости пола 92 или, при необходимости, в комбинации этих направлений. В связи с этим, граничные области 180 могут применяться не только в направлениях в плоскости пола 92, а также в направлениях поперек пола 92, что позволяет системе 10 отслеживания гарантировать надлежащую величину просвета во избежание столкновений. Как более подробно описано ниже, одна такая машина, способная к движению этого типа, может включать в себя радиоуправляемое транспортное средство без водителя (UAV), управляемое или иным образом осуществляющее связь с системой 142 управления и системой 10 отслеживания.
[00130] Фиг. 15 иллюстрирует способ 200 использования граничных областей 180, проиллюстрированных и описанных со ссылкой на фиг. 14. Способ 200 может включать в себя этапы, хранящиеся в памяти 22 и исполняемые одним или более процессорами 20 блока 18 управления. Этапы способа 200 могут осуществляться в других порядках, чем показано, или могут быть полностью исключены. Кроме того, некоторые из проиллюстрированных блоков могут осуществляться совместно друг с другом. Кроме того, хотя он описан с точки зрения одной-единственной машине 170, способ 200 может применяться одновременно к нескольким машинам 170.
[00131] В проиллюстрированном варианте осуществления способ 200 включает в себя определение (блок 202) положения машины 170 на основании положения отраженного электромагнитного излучения, принятого детектором 16 системы 10 отслеживания. Опять же, это положение можно определять на основании регистрации электромагнитного излучения, отраженного от обратно-отражающих меток 24 (размещенных на полу и/или на самой машине 170), которое включает в себя предполагаемое отсутствие такого электромагнитного излучения. В других вариантах осуществления, блок 18 управления может интерпретировать отражение электромагнитного излучения, принятое с помощью детектора 16, как имеющее профиль, соответствующий машине 170.
[00132] Способ 200 также включает в себя применение (блок 204) границы (например, граничной области 180) к положению машины (и/или положению человека, в любом случае). Опять же, граничная область 180 может применяться в двух или трех пространственных измерениях и может предусматривать не только скалярную информацию расстояния, но, дополнительно или альтернативно, может включать в себя несколько обратно-отражающих меток 24 в сетке 90.
[00133] Способ 200 дополнительно включает в себя определение (блок 206) близости машины 170 (с граничной областью 180) к другим машинам 170, людям 70, неподвижным объектам и т.д., и любых граничных областей, связанных с этими отслеживаемыми элементами. Определение, связанное с блоком 206, может осуществляться, например, путем сравнения идентифицированных положений двух данных объектов друг с другом, и оценивания, моделирования и т.д. расстояния между ними.
[00134] Кроме того, способ 200 включает в себя определение (запрос 208), действительно ли идентифицированная близость меньше или равна заранее определенному пороговому значению, которое может соответствовать расстоянию, связанному с граничной областью 180. Соответственно, этот порог могут быть одинаковым для всех машин 170, или порог может отличаться для некоторых машин 170.
[00135] Если определенная близость меньше или равна пороговому расстоянию, способ 200 включает в себя регулировку (блок 210) работы машины 170 или перенаправление машины 170. Как рассмотрено выше, блок 18 управления системы 10 отслеживания может отправлять сигнал управления на контроллер машины 170 (например, осуществляющий связь с или связанный с системой 154 активации, показанной на фиг. 12) для активации этой регулировки и/или перенаправления машины 170. Если же определенная близость больше порога, никакого изменения не производится, и способ 200 повторяется.
[00136] В некоторых вариантах осуществления, глубина регулировки может зависеть от определения близости, связанного с запросом 208. Например, если векторная информация, связанная с перемещением машины 170, предусматривает, что машина 170 имеет некоторую вероятность столкновения с другим элементом или человеком в зоне 30 регистрации, блок 18 управления может предписывать относительно более слабую регулировку некоторого аспекта перемещения машины, которая, с течением времени, предписывает машине 170 избегать столкновения с другим элементом или человеком. Другими словами, система 10 отслеживания может участвовать в некотором объеме прогностического управления для сглаживания ситуаций, когда ответ на запрос 208 является утвердительным. В связи с этим, в других вариантах осуществления могут использоваться другие разновидности способа 200. Например, в некоторых вариантах осуществления, способ 200 может не включать в себя применение (блок 204) границы 180 к положению машины, но, альтернативно, может включать в себя оценивание внешнего края машины 170 на основании электромагнитного излучения, отраженного на детектор 16, и определение близости этого внешнего края к другим машинам 170, людям 70 и т.д.
[00137] Продолжая рассматривать вышеприведенный пример, связанный с перемещением автоматизированного оборудования парка в контексте парада, система 10 отслеживания также может оценивать информацию, относящуюся к группировкам людей 70 относительно отдельных машин 170 для улучшения интерактивности между людьми 70 и машинами 170 (например, путем удаления физических барьеров или снижения опоры на них). В частности, система 142 управления, с использованием системы 10 отслеживания, может осуществлять контроль и управлять интерактивной системой, где переменно активируемые и управляемые варианты осуществления оборудования 12 парка развлечений контактируют с публикой. Система 10 отслеживания может быть выполнена с возможностью подачи сигналов управления на оборудование 12 действия представления, которые побуждают оборудования 12 вступать в контакт или взаимодействие с публикой относительно эффективным и динамическим образом. Фиг. 16 и 17 иллюстрируют два примера, в которых система 10 отслеживания может помогать в управлении оборудованием 220 действия представления для контакта с членами публики 222. В порядке неограничительного примера, оборудование 220 действия представления может включать в себя различные автоматизированные и мобильные элементы, например, роботы, автоматы и пр. Публика 222 может включать в себя любое количество людей 70, стоящих в непосредственной близости друг к другу.
[00138] Как показано на фиг. 16, публика 222 рассеяна по зоне 30 регистрации и не включает в себя четко ограниченную группу, что, например, можно было бы предположить при наличии сидячих мест. Оборудование 220 действия динамического представления выполнено с возможностью вплетаться и выплетаться из публики 222, на основании отслеживания осуществляемого в соответствии с вышеизложенными вариантами осуществления. Например, система 10 отслеживания может идентифицировать положения людей 70 в публике 222 путем регистрации отражения электромагнитного излучения от самих людей 70, путем оценивания преграждения сетки 90 на полу 92, путем отслеживания обратного отражения от обратно-отражающих меток 24, размещенных на одежде людей, или любой их комбинации.
[00139] Используя зарегистрированные положения людей 70, система 142 управления (например, включающую в себя систему 10 отслеживания) может идентифицировать наличие промежутков 224, которые существуют в публике 222, и оценивать промежутки 224 для обеспечения некоторых типов перемещения оборудования 220 действия динамического представления. После идентификации промежутков 224 в публике 222 и любого соответствующего их оценивания (например, сравнения размера промежутков 224 с размером оборудования 220 действия представления, вероятности изменения промежутков 244 на основании векторов перемещения людей 70), система 142 управления (включающая в себя систему 10 отслеживания) может выдавать на оборудование 220 действия представления сигналы управления, которые побуждают оборудование 220 действия представления перемещаться в промежутки 224. Как показано стрелками 226, оборудование 220 действия представления может перемещаться в промежутки 224, образованные в публике 222, и когда люди 70 перемещаются в разные положения вокруг оборудования 220 действия представления, система 10 отслеживания может продолжать динамически определять положения промежутков 224 в публике 222, которые может заполнять оборудование 220 действия представления. Таким образом, система 142 управления управляет оборудованием 220 действия представления для перемещения в и из открытых пространств, чтобы оборудование 220 действия представления динамически адаптировалось к публике 222.
[00140] Согласно фиг. 17, оборудование 220 действия динамического представления выполнено с возможностью нацеливания, для улучшенного взаимодействия, на конкретную группу 230 людей 70. Согласно раскрытым выше методам, система 142 управления (включающая в себя систему 10 отслеживания) может идентифицировать положения людей 70, которые не присутствуют в зоне 30 регистрации, путем регистрации отражения электромагнитного излучения от самих людей 70 или от обратно-отражающих меток 24, размещенных в рисунке на полу, где стоят многочисленные люди 70. На основании зарегистрированных положений людей 70, система 142 управления (включающая в себя систему 10 отслеживания) может обнаруживать группы 230 людей 70, присутствующих в зоне 30. Таким образом, система 142 управления может определять, на основании положений людей 70, где люди 70 более плотно собраны в группы 230 в зоне 30 регистрации. После идентификации групп 230, система 142 управления может выдавать на оборудование 220 действия представления сигналы управления, которые побуждают оборудование 220 действия представления перемещаться относительно близко к группам 230. В некоторых вариантах осуществления, оборудование 220 действия представления, которое первоначально располагается на удалении от групп 230, может активироваться для перемещения к одной из идентифицированных групп 230, как показано стрелкой 232. В других вариантах осуществления, система 142 управления может отправлять сигналы на оборудование 220 действия представления, которое располагается вблизи идентифицированных групп 230 для запуска эффекта с помощью оборудования 220 действия представления. Когда разные детали оборудования 220 действия представления располагаются в определенных ориентациях относительно друг друга, могут инициироваться другие действия (например, взаимодействия между деталями, эффекты или остановка).
[00141] Следует отметить, что в любой форме оборудования действия динамического представления, взаимодействующего с людьми 70, представленного на фиг. 16 и 17, оборудованием 220 действия представления можно управлять для поддержания желаемого порогового расстояния от людей 70 или другого оборудования 220 действия представления в зоне 30 регистрации. В частности, система 142 управления может использовать схему управления, аналогичную рассмотренной выше со ссылкой на способ 200, например, для поддержания пространственного барьера вместо физического барьера вокруг каждой детали оборудования 220 действия представления. В некоторых вариантах осуществления, физический барьер может не быть исключен, но может быть менее ограничительным, что позволяет улучшить взаимодействие между людьми 70 и оборудованием 220.
[00142] Улучшенная интерактивность, обеспечиваемая вариантами осуществления раскрытой системы 10 отслеживания, не обязана ограничиваться контекстом движения транспортных средств или аналогичного оборудования через скопление людей. Действительно, система 10 отслеживания может использоваться, в некоторых вариантах осуществления, для обеспечения обратной связи для оценивания качества анимации анимированной фигуры, например, автомата, имеющего человекоподобные элементы. Другие варианты осуществления анимированной фигуры могут включать в себя роботизированную собаку, кошку или другой живой организм, движение которого можно имитировать с использованием робототехники. Фиг. 18 демонстрирует вариант осуществления автомата 250, снабженного множеством обратно-отражающих меток 24, причем каждая метка 24 множества располагается в стратегических точках на автомате 250 (например, вверху и внизу головы, на плечах, локтях и запястьях). Расположение обратно-отражающих меток 24 может предоставлять возможность отслеживания движений автомата. Когда весь или часть автомата 250 движется в пространстве и времени, один или более из излучателей 14 может испускать пучок 28 электромагнитного излучения к автомату 250, и один или более детекторов 16 может регистрировать отражение пучка 28 электромагнитного излучения от обратно-отражающих меток 24. На основании данных, принятых от одного или более детекторов 16, блок 18 управления может определять приблизительные положения различных частей тела автомата 250 и сравнивать эти приблизительные положения с предполагаемыми положениями, хранящимися в памяти 22. Таким образом, блок 18 управления может определять, действуют ли части тела автомата 250 в заранее определенных ограничениях. Обратная связь 252 на основании этого анализа, или экземпляр первичных или минимально обработанных данных, может предоставляться от блока 18 управления другим элементам обработки и управления парка развлечений, например, схеме 254 управления анимацией. Опять же, аналогичные методы можно применять к любой желаемой анимированной фигуре, не только фигуре, изображающей человека. Следует отметить, что автоматы 250 и другое подобное движущееся оборудование можно калибровать с использованием методов, соответствующих настоящим вариантам осуществления, например, для обеспечения согласованно реалистичного движения. Например, автоматы 250 можно отслеживать согласно настоящим методам и сопоставлять с рисунком перемещения, связанным с реалистичным движением. Блок 18 управления может осуществлять перекалибровку автоматов 250 в парке развлечений на периодической основе согласно рисунку перемещения путем отслеживания перемещения обратно-отражающих меток 24, расположенных на автоматах 250, и регулировки перемещения автоматов 250 таким образом, чтобы перемещения меток 24, по существу, соответствовали рисунку перемещения. Такая калибровка может осуществляться, например, когда не предполагается наличие каких-либо объектов или людей вблизи или в пределах прямой видимости автоматов 250.
[00143] Управление машинами наподобие изложенного выше можно также применять к оборудованию 12 парка развлечений, способному перемещаться по парку 268 развлечений, как показано в виде сверху на фиг. 19. Действительно, как показано на фиг. 19, теперь понятно, что раскрытая система 10 отслеживания может использоваться, например, совместно с радиоуправляемой системой 270 без участия человека (UAS) для отслеживания положения и перемещения одного или более радиоуправляемых транспортных средств 272 без водителя (UAV), например, для обеспечения всего или части светового представления, для улучшения тематического представления, для поддержки спецэффектов, для осуществления контроля, для взаимодействия с людьми, для вещания беспроводного (например, WiFi) сигнала и аналогичных функций в парке 268 развлечений.
[00144] в частности, фиг. 19 демонстрирует пример плана парка 268 развлечений, в котором одно или более UAV 272 можно отслеживать в трех пространственных измерениях и во времени с использованием раскрытой системы 10 отслеживания. В соответствии с некоторыми вариантами осуществления, система 10 отслеживания может отслеживать обратно-отражающие метки 24, расположенные (например, закрепленные) на UAV 272. Присутствие нескольких обратно-отражающих меток 24 на UAV 272 может предоставлять возможность детектору 16 сравнивать электромагнитные сигналы, обратно-отраженные от разных меток 24 для определения положения, ориентации, скорости и т.д., каждого из UAV 272 в соответствии с вариантами осуществления, рассмотренными выше со ссылкой на фиг. 9A. Как показано, каждый UAV 272 включают в себя три обратно-отражающие метки 24, хотя меньше или больше обратно-отражающих меток 24 может использоваться в зависимости от отслеживания, осуществляемого системой 10 отслеживания и предполагаемого режима перемещения UAV 272.
[00145] Отслеживание UAV 272 в соответствии с настоящими вариантами осуществления также может обеспечивать возможность автоматически управлять своим перемещением, например, путем обеспечения информации отслеживания, генерируемой системой 10 отслеживания в качестве обратной связи для схемы 274 управления UAV, связанной с системой 142 управления. Например, схема 274 управления UAV может быть одним или более наборов инструкций, хранящихся в памяти системы 142 управления (например, программным пакетом), например, в памяти 22 блока 18 управления, или может включать в себя одну или более специализированных интегральных схем (ASIC), одну или более вентильных матриц, программируемых пользователем (FPGA), один или более процессоров общего назначения или любую их комбинацию. Схема 274 управления UAV также может включать в себя устройства связи, выполненные с возможностью осуществления связи с UAV 272, хотя в настоящее время рассматривается, что UAV 272 могут использовать средства связи, совместно используемые системой 10 отслеживания для облегчения обработки и управления положениями, скоростями и т.д. UAV.
[00146] В парке 268 развлечений могут располагаться одна или более из систем 10 отслеживания. Действительно, как изложено выше, использование нескольких регистрирующих устройств позволяет повысить возможности отслеживание, в частности, где предполагается, что отслеживаемая цель имеет несколько степеней свободы движения. Соответственно, парк 268 развлечений будет, в целом, включать в себя, по меньшей мере, несколько детекторов 16, позволяющих системе 10 отслеживания получать сигналы от, по меньшей мере, одной из обратно-отражающих меток 24 на UAV 272 в любое данное время, независимо от ориентации UAV 272 относительно земли. Как показано, UAV 272 могут перемещаться вдоль дорожки 276 для посетителей, которые люди 70 могут использовать для перемещения пешком (или на ленте) между некоторыми аттракционами (например, зданиями 278). Элементы системы 10 отслеживания могут располагаться на некоторых или всех из зданий 278, например, на участках зданий 278, которое обращены к дорожке 276 для посетителей. Это может предоставлять возможность излучателям 14 иметь перекрывающиеся электромагнитные излучения (например, световые пучки 28), благодаря чему, обратно-отражающие метки 24 освещаются, по существу, непрерывно, что позволяет детекторам 16, связанным с излучателями 14, иметь, по существу, непрерывный вид движущихся UAV 272. Излучатель 14 и детекторы 16 могут, альтернативно или дополнительно, располагаться на других внешних объектов в парке 268 развлечений или на своей собственной опоре. Например, как показано на фиг. 19, один или более из излучателей 14 и один или более из детекторов 16 могут быть прикреплены к мачте 280, расположенной вблизи дорожки 276 таким образом, чтобы излучатель 14 мог испускать пучок 28 электромагнитного излучения на или над дорожкой 276, и чтобы детектор 16 мог принимать обратно-отраженный свет от обратно-отражающих элементов на дорожке 276 или на UAV 272.
[00147] Парк 268 развлечений может использовать один-единственный из блоков 18 управления, который осуществляет связь (например, беспроводную) с несколькими (например, некоторыми или всеми) из излучателей 14 и детекторов 16, расположенных вдоль дорожки 276, или может использовать несколько блоков 18 управления, как показано. Когда UAV 272 перемещаются вдоль дорожки 276, которая может представлять зону 30 регистрации нескольких систем 10 отслеживания, они могут перемещаться через и за пределы зон 30 регистрации каждой пары излучатель/детектор. Соответственно, система 142 управления может координировать переход между сигналами от одного детектора 16 к другому детектору 16, когда UAV 272 перемещаются вдоль дорожки 276 для обеспечения, по существу, непрерывного отслеживания каждого UAV 272. Такие переходы также могут происходить между блоками 18 управления систем 10 отслеживания. Таким образом, когда одна система 10 отслеживания прекращает отслеживать одно из UAV 272 поскольку UAV 272 вышло из зоны 30 регистрации, связанной с ее излучателями 14 и детекторами 16, она может переводить отслеживание этого UAV 272 на другую систему 10 отслеживания, которая располагается вдоль прогнозируемого пути UAV 272 (например, на основании ориентации и смысла вектора перемещения UAV).
[00148] Система 10 отслеживания также может отслеживать преграждение сетки 90 обратно-отражающих меток 24 на дорожке 276, которая может соответствовать полу 92, описанному выше в отношении отслеживания людей 70 и машин 170 в зоне. Действительно, система 10 отслеживания может быть выполнена с возможностью отслеживания присутствия и положения людей 70, например, группы людей 70, вдоль дорожки 276. Отслеживание людей 70 вдоль дорожки 276 может быть желательно по нескольким причинам, например, чтобы UAV 272 могло избегать столкновений с людьми 70 и для улучшения взаимодействий с людьми 70. Кроме того, системы 10 отслеживания также могут использовать преграждение сетки 90 как часть общего способа отслеживания, используемого для отслеживания UAV 272. Например, один или более из детекторов 16 может иметь вид сверху дорожки 276 и UAV 272, таким образом, что UAV 272 располагаются между сеткой 90 и детекторами 16. Соответственно, в некоторых вариантах осуществления, системы 10 отслеживания могут коррелировать некоторые рисунки преграждения сетки с UAV 272.
[00149] Система 10 отслеживания также может, например, с использованием сетки 90, связывать границу 282 с группами людей 70, чтобы система отслеживания и система 274 управления UAV могли поддерживать UAV 272 на некотором расстоянии от людей 70. Система 10 отслеживания также может осуществлять контроль за некоторыми зонами, в которых, предположительно, собираются или группируются люди 70, например, зону 284 сидячих мест для посетителей, и может применять к ней границу 286, благодаря чему, UAV 272 поддерживает удалении на некоторое расстояние от зоны 284 сидячих мест.
[00150] В связи с этим, система 274 управления UAV может быть выполнена с возможностью регулировать траекторию полета UAV 272 по нескольким причинам, включая приближение границ 282, 286, или когда система 274 управления UAV оценивает некоторую диагностическую информацию, связанную с UAV 272, и определяет, что одно из UAV 272 нуждается в обслуживании.
[00151] Для обеспечения улучшенных взаимодействий, регулировок траектории полета и других вышеупомянутых аспектов, связанных с UAV 272, каждое из UAV 272 может иметь различные компоненты 288, которые могут включать в себя, в том числе, различные электрические и электромеханические системы. Как показано, в общем смысле, UAV 272 могут включать в себя систему 290 управления перемещением, которое включает в себя различные электромеханические устройства, например, винты наподобие вертолетных, различные насосы, связанные с движительной системой, или аналогичные устройства. Согласно вариантам осуществления, где UAV 272 используют движительную систему, движительная система может использовать сжатый газ и/или топливо и окислитель. Подъемная система, связанная с UAV 272, также может включают в себя реактивную подъемную систему, или может использовать вращающиеся винты для создания подъемной силы, как в вертолете, или комбинацию этих элементов.
[00152] Компоненты 288 также могут включать в себя различные интерактивные элементы 292, которые обеспечивают улучшенные взаимодействия с людьми 70, координацию эффектов представления и/или спецэффектов с представлением, осуществляемым, например, в зоне 294 представления. В порядке неограничительного примера, интерактивные элементы могут включать в себя преобразователи аудиосигнала, например, громкоговорители или микрофоны, могут включать в себя различные источники электромагнитного излучения, например, лазеры, светодиоды (LED), стробированные источники света и т.д. Дополнительно или альтернативно, интерактивные элементы 292 могут включать в себя другие излучатели, которые обеспечивают людям 70 различимый стимул, например, источники запаха, выполненный с возможностью выделения некоторых химикатов, связанных с некоторыми типами запахов, источники сжатого газа для испускания порций сжатого воздуха для тактильной стимуляции и т.д.
[00153] Чтобы UAV 272 могли управлять системой 274 управления UAV, и, в некоторых вариантах осуществления, для обеспечения избыточного отслеживания UAV 272, компоненты 288 также могут включать в себя систему 296 связи. Система 296 связи может включать в себя различные устройства связи, например, приемопередатчики Wi-Fi, устройства радиосвязи, или любое другое устройство, способное осуществлять связь в некоторых диапазонах электромагнитного спектра. Система 296 связи может предоставлять возможность UAV 272 осуществлять связь с системой 274 управления UAV, и наоборот, чтобы система 274 управления UAV могла инициировать регулировки положения с использованием системы 290 управления перемещением, чтобы предписывать UAV запускать один или более эффектов представления или другие интерактивные элементы с использованием интерактивных элементов 292 и т.д.
[00154] На основе описания различных элементов UAV 272 и парка 268 развлечений, различные аспекты, связанные с работой UAV 272, будут описаны здесь более подробно для обеспечения лучшего понимания некоторых аспектов настоящих вариантов осуществления. Например, когда UAV 272 перемещаются вдоль дорожки 276, они могут отслеживаться системами 10 отслеживания, на основании связанных с ними обратно-отражающих меток 24 и/или на основании преграждения сетки, как описано выше. Когда UAV 272 встречается с объектами или людьми, как показано группой людей 70 вблизи одного из зданий 278, система 10 отслеживания может распознавать, что UAV 272 имеет траекторию, которая может потенциально приводить к тому, что UAV 272 будет создавать помеху людям 70. Соответственно, система 274 управления UAV может осуществлять связь с UAV 272, чтобы предписывать UAV 272 изменять свою траекторию полета вокруг границы 282, связанной с группой людей 70. Отрегулированная траектория полета UAV 272 показана в целом стрелкой 298.
[00155] Системы 10 отслеживания также могут использоваться для поддержания UAV 272 в некоторых зонах парка 268 развлечений. Например, система 10 отслеживания может отслеживать обратно-отражающие метки 24 на UAV 272 относительно известной границы 300, которую можно рассматривать для представления зоны, не находящейся в поле зрения одной или более из систем 10 отслеживания. Соответственно, если система 10 отслеживания определяет, что UAV 272 вышло за пределы известной границы 300, система 274 управления UAV может отправлять на UAV 272 сигналы управления, которые предписывают UAV 272 остановиться или направиться в другие зоны. Аналогично, UAV 272 может включать в себя встроенные элементы, которые осуществляют эти операции, как более подробно описано ниже.
[00156] Как показано, UAV 272 может направляться вдоль нескольких разных дорожек, которые изображены пунктирными стрелками, ведущими к разным внешним элементам парка 268 развлечений. Например, UAV 272 может направляться системой 274 управления UAV вдоль первого пути 302 в зону 304 остановки. Зона 304 остановки, в целом, предназначена для представления зоны парка 268 развлечений, находящейся на удалении от зон, где могут располагаться люди 70, и/или на удалении от зон, где располагаются аттракционы представления. Таким образом, зона 304 остановки также может предназначаться для представления положения аварийной остановки.
[00157] UAV 272 может направляться в зону 304 остановки по нескольким причинам. В порядке одного примера, система 274 управления UAV может определить, что UAV 272, на основании диагностической информации, требует ремонта или нуждается в обслуживании. В этих ситуациях, UAV 272 может направляться вдоль первого пути 302 в зону 304 остановки, которая может быть доступна различным техникам или другим операторам, которые затем могут ремонтировать UAV 272. Альтернативно, UAV 272 может включать в себя свои собственные инструкции регулировки траектории полета, которые в некоторых ситуациях могут осуществляться системой 290 управления перемещением. Например, если система 296 связи UAV 272 теряет соединение с системой 274 управления, UAV 272 может направляться в ближайшую область, которая рассматривается как находящаяся на удалении от посетителей и аттракционов представления, в этом случае, зоны 304 остановки.
[00158] В других вариантах осуществления, UAV 272 может направляться вдоль второй дорожки 306 обратно к дорожке 276 для посетителей. Например, UAV 272 может начать перемещаться вдоль первого пути 302 и, в ответ на некоторые обновленные инструкции системы 274 управления UAV, изменить свой пункт назначения. Например, если система 274 управления определяет, что UAV 272 нуждается в помощи во время представления, система 274 управления UAV может отправлять надлежащие инструкции на UAV 272 для его перевода с первого пути 302 на второй путь 306 и к дорожке 276 для посетителей, которая может вести в зону 294 представления. Соответственно, система 274 управления UAV может, при необходимости, выполнять регулировки в реальном времени в отношении различных траекторий полета UAV 272.
[00159] В порядке еще одного примера отклоняющихся траекторий полета, UAV 272 можно переводить с первого пути 302 на третий путь 308, ведущий к одному из зданий 278. Такая регулировка траектории полета может производиться системой 274 управления UAV в ответ на указание, что UAV 272 находится за пределами конкретной дальности связи или за пределами дальности одной или более из систем 10 отслеживания.
[00160] Соответственно, система 274 управления UAV, в общем смысле, может отправлять на UAV 272 сигналы, которые предписывают UAV 272 возвратиться в конкретную область парка 268 развлечений для переустановления отслеживания системой 10 отслеживания. Кроме того, UAV 272 может иметь автоматизированные процедуры, которые осуществляются, когда некоторые соединения заканчиваются между UAV 272 и системой 274 управления UAV. В таком примере, UAV 272 может следовать отрегулированной траектории полета, например, проиллюстрированной третьей траекторией 308 полета, которая направляет UAV 272 в известное положение или положение, имеющее конкретный тип маяка, распознаваемого системой 296 связи UAV 222.
[00161] Система 274 управления UAV также может участвовать, совместно с одной или более из систем 10 отслеживания, расположенных в зоне 294 представления, в координации действий UAV 272 с исполнителями 310 в зоне 294 представления. Например, система 274 управления UAV, приняв информацию отслеживания от системы 10 отслеживания, может координировать перемещение UAV 272 с отслеживаемым перемещением исполнителей 310 и/или любых других объектов в зоне 294 представления. Кроме того, UAV 272 могут обеспечивать улучшенную интерактивность с посетителями в зоне 284 сидячих мест для посетителей путем перемещения из зоны 294 представления, в пределах границы 286 зоны 284 сидячих мест для посетителей и обратно. В случаях, когда система 274 управления UAV определяет, что UAV не действует, как положено, или начинает дрейфовать из отслеживаемого положения, или любое другое нежелательное обстоятельство, система 274 управления UAV может направить UAV 272 в одну из множества зон 312 остановки и инициировать остановку UAV 272. В зонах 312 остановки, инициированная остановка UAV 272 может предписывать UAV 272 отключиться. В порядке одного примера, зоны 312 остановки могут представлять собой острова, окруженные водной массой, или отдельными водными массами, где, предположительно, отсутствуют люди 70 и другие объекты представления.
[00162] Иллюстративные конфигурации UAV 272 можно лучше понять, обратившись к фиг. 20 и 21, которые являются видами снизу и в вертикальном разрезе, соответственно, различных вариантов осуществления UAV 272. В частности, вид снизу вариантов осуществления UAV 272, представленный на фиг. 20, демонстрирует UAV 272 как квадракоптер, имеющий множество подъемных и/или движительных устройств 320. Подъемные и/или движительные устройства 320 присоединены к корпусу 322 UAV 272 кронштейнами 324. Однако следует отметить, что проиллюстрированный вариант осуществления UAV 272 является лишь одним примером, и другие конфигурации также подлежат включению в объем настоящего изобретения. Как указано, корпус 322 и кронштейны 324 могут быть снабжены одной или более обратно-отражающих меток 24. Соответственно, система 10 отслеживания может быть выполнена с возможностью отслеживания трехмерного пространственного перемещения UAV 272 во времени. Например, UAV 272 может иметь, по меньшей мере, одну, по меньшей мере, две или, по меньшей мере, три обратно-отражающие метки 24. Очевидно, что включение нескольких обратно-отражающих меток 24 может предоставлять возможность системе 10 отслеживания отслеживать UAV 272 с более высокой степенью точности и аккуратности, в том числе отслеживать ориентацию UAV 272 на основании относительного перспективного расположения обратно-отражающих меток 24. Например, ориентацию UAV 272 можно отслеживать согласно методам, описанным выше со ссылкой на фиг. 9B и 9C.
[00163] Следует также заметить, что расположение обратно-отражающих меток на UAV 272 (например, на корпусе 322 и/или кронштейнах 324) может обеспечивать системе 10 отслеживания способность отслеживания крена, тангажа и рыскания UAV 272. Это отслеживание может быть полезно для регулировки или иного управления траекторией полета UAV 272, например, блоком 18 управления и/или системой 274 управления UAV.
[00164] Проиллюстрированный вариант осуществления UAV 272 также включает в себя конкретные примеры компонентов 288. Компоненты 288, как показано, могут включать в себя громкоговоритель 326, который составляет часть интерактивных элементов 292, изображенных на фиг. 19, и излучатель 328, который также составляет часть интерактивных элементов 292, показанных на фиг. 19, схему 330 управления подъемом и/или поступательным движением, которая может составлять часть системы 290 управления перемещением, показанной на фиг. 19, и приемопередатчик 332, который может составлять часть системы 296 связи, изображенной на фиг. 19. Компоненты 288 также могут включать в себя схему обработки, включающую в себя один или более процессоров 334 и один или более блоков 336 памяти для осуществления различных процедур анализа и управления, связанных с операцией или информацией, принятой от любого одного или комбинации компонентов 288.
[00165] Согласно варианту осуществления UAV 272, изображенному на фиг. 21, как показано, UAV 272 может включать в себя, полностью или частично, систему 10 отслеживания сконфигурированную в соответствии с настоящими вариантами осуществления. Например, UAV 272 может включать в себя, по меньшей мере, один из излучателей 14 и, по меньшей мере, один из детекторов 16 посредством присоединения к корпусу 322, например, на обращенной вниз поверхности 350 корпуса 322. Использование системы 10 отслеживания на UAV 272 может быть желательно, например, для обеспечения UAV 272 возможности навигации по или иного следования пути обратно-отражающих меток 24, размещенных, например, на дорожке 276. Соответственно, UAV 272 может быть выполнено с возможностью, по меньшей мере, частично перемещаться через парк 268 развлечений с использованием только инструкций и отслеживания, которые содержатся на или в UAV 272. Однако настоящее изобретение также включает в себя варианты осуществления, в которых система 296 связи UAV 272 принимает инструкции от системы 274 управления UAV (например, для обновления пункта назначения), и UAV 272 следует обратно-отражающим меткам 24 до конкретного пункта назначения. Соответственно, очевидно, что некоторые из обратно-отражающих меток 24, образующих путь, могут иметь разные оптические качества, которые позволяют отличать пути друг от друга. Кроме того, UAV 272 может включать в себя излучатель 14 и детектор 16 и использовать их для отслеживания других устройств или для отслеживания людей с использованием любого одного или комбинации вышеописанных методов.
[00166] Общую конструкцию UAV 272 также можно лучше понять, обратившись к фиг. 21. Как показано, UAV 272 включает в себя верхнюю поверхность 352, которая может выступать в роли полки или платформы, выполненной с возможностью переноса некоторых из устройств спецэффектов или оборудования, образующих все или часть интерактивных элементов 292. Действительно, элементы, встроенные в UAV 272, могут располагаться на верхней поверхности 352, на обращенной вниз части 350, или в другом месте на UAV 272.
[00167] Как изложено выше, несколько разных типов устройств, оборудования, транспортных средств и т.д., можно отслеживать в соответствии с настоящими вариантами осуществления с использованием системы 10 отслеживания. Действительно, помимо отслеживания роботов, UAV и т.д., настоящие варианты осуществления могут использовать систему 10 отслеживания для отслеживания перемещения транспортного средства аттракциона для катания в пространстве и времени, либо вдоль физически ограниченного пути (например, трековой или рельсовой системы) или вдоль неограниченного пути (например, пути, определяемого внешними элементами). Фиг. 22-25 изображают варианты осуществления, где транспортное средство 360 аттракциона для катания (или несколько таких транспортных средств 360) располагается на ограниченном пути 362 и отслеживается с использованием системы 10 отслеживания, тогда как фиг. 26-29 изображают варианты осуществления, где транспортные средства 360 аттракциона для катания располагаются на неограниченном пути 363 и отслеживаются с использованием системы 10 отслеживания. Отслеживание, в целом, могут осуществляться в соответствии с любым одним или комбинацией вариантов осуществления, изложенных выше со ссылкой на фиг. 3-9, в зависимости, например, от того, отслеживается ли двухмерное движение или трехмерное движение.
[00168] При оценивании работы аттракциона парка развлечений, может быть желательно отслеживать положение транспортного средства 360 аттракциона для катания в пространстве, чтобы гарантировать, что транспортное средство 360 аттракциона для катания движется и действует предполагаемым образом. Если транспортное средство 360 аттракциона для катания не находится в желаемом положении или ориентации в некоторый момент времени, это может указывать, что транспортное средство 360 аттракциона для катания не действует желаемым образом и, таким образом, может извлекать пользу из профилактического обслуживания.
[00169] Начиная с отслеживания транспортных средств 360 аттракциона для катания в виде сверху, и в двух измерениях, фиг. 22 демонстрирует вариант осуществления, где разные транспортные средства 360 аттракциона для катания на треке 362 совместно образуют увеселительный аттракцион 364, каждый элемент - одна из обратно-отражающих меток 24A, 24B, 24C и 24D. Каждая из меток 24A, 24B, 24C и 24D выполнены с возможностью обратного отражения отдельной частоты электромагнитного излучения (например, пучка 28 электромагнитного излучения) обратно к детектору 16. Система 10 отслеживания может отслеживать обратно-отражающие метки 24A, 24B, 24C и 24D для отличения конкретных транспортных средств 360 аттракциона для катания друг от друга и для регистрации приблизительного положения каждого из транспортных средств 360 аттракциона для катания, либо относительно системы координат, либо относительно друг друга, или обоих.
[00170] Например, в некоторых вариантах осуществления, разные транспортные средства 360 аттракциона для катания могут быть связаны с разными инструкциями или информацией положения, хранящимися в блоке 18 управления системы 10 отслеживания. В этом примере, блок 18 управления может быть выполнен с возможностью отправлять сигнал управления, выполненный с возможностью предписания активации некоторого оборудования 12 парка развлечений, когда одно из транспортных средств 360 аттракциона для катания проходит некоторую точку на треке 362. Блок 18 управления может идентифицировать это транспортное средство 360 аттракциона для катания на основании частоты электромагнитного излучения, отраженного обратно-отражающей меткой 24, связанной с конкретным транспортным средством 360 аттракциона для катания, таким образом, запуская оборудование парка развлечений (например, устройство эффекта), когда транспортное средство 360 аттракциона для катания проходит точку на треке 362. В других вариантах осуществления, конкретные качества электромагнитного излучения (например, конкретные частоту, фазу, длину волны), обратно-отраженного конкретной обратно-отражающей меткой 24 (например, 24A, 24B, 24C и 24D), могут сигнализировать блоку 18 управления использовать другой алгоритм, хранящийся в памяти 22 (например, связывать транспортное средство 360 аттракциона для катания и его метку с другим устройством эффекта или другими параметрами управления). Следует понимать, что другие типы систем и приложений могут использовать систему 10 отслеживания, имеющую блок 18 управления, закодированный следовать первому набору инструкций, когда отраженное электромагнитное излучение от обратно-отражающей метки 24 имеет, например, первую частоту, и следовать второму набору инструкций, когда электромагнитное излучение от обратно-отражающей метки 24 имеет, например, вторую частоту.
[00171] Также как изложено выше, например, со ссылкой на фиг. 9A, несколько отдельных детекторов 16 можно использовать для регистрации обратно-отражающих меток 24 с разных точек зрения и/или для отслеживания разных частот электромагнитного излучения, отраженного обратно-отражающими метками 24. Фиг. 23 иллюстрирует один такой вариант осуществления системы 10 отслеживания, используемой для отслеживания транспортного средства 360 аттракциона для катания в трехмерном пространстве. В частности, система 10 отслеживания включает в себя два набора излучателей 14 и детекторов 16, проиллюстрированные как первый набор 370 и второй набор 372.
[00172] Первый излучатель/детектор набор 370 располагается над увеселительным аттракционом 364, и второй излучатель/детектор набор 372 располагается сбоку от увеселительного аттракциона 364. Таким образом, первый набор 370 выполнен с возможностью получения вида сверху (например, в плане), тогда как второй набор 372 выполнен с возможностью получения вида в вертикальном разрезе транспортного средства 360 аттракциона для катания. В частности, в проиллюстрированном варианте осуществления, первый набор 370 располагается таким образом, что излучатель 14 и детектор 16 выровнены с плоскостью, образованной осью X 374 и осью Y 376 увеселительного аттракциона 364. Кроме того, второй набор 372 располагается таким образом, что излучатель 14 и детектор 16 выровнены с плоскостью, образованной осью X 374 и осью Z 378. Таким образом, первый набор 370 может отслеживать положение транспортного средства 360 аттракциона для катания в плоскости X-Y, тогда как второй набор 372 может отслеживать положение транспортного средства 360 аттракциона для катания в плоскости X-Z, ортогональной плоскости X-Y. Это может обеспечивать относительно точное приближение трехмерного положения и/или ориентации транспортного средства 360 аттракциона для катания. Согласно вариантам осуществления, в которых транспортное средство 360 аттракциона для катания действует в одной-единственной плоскости (например, плоскости X-Y), только один из наборов 370, 372 излучателя 14 и детектора 16 может использоваться для отслеживания двухмерного положения транспортного средства 360 аттракциона для катания. Альтернативно, можно использовать избыточные наборы излучателей 14 и детекторов 16 (например, для обеспечения дальности).
[00173] На фиг. 24 проиллюстрирован вариант осуществления увеселительного аттракциона 364, в котором трек 362 располагается в помещении или вблизи конструкции, имеющей опорный механизм для системы 10 отслеживания. В частности, фиг. 24 демонстрирует, каким образом, что трек 362 может включать в себя сложные повороты, и как системы 10 отслеживания настоящего изобретения можно использовать для отслеживания перемещения транспортных средств 360 аттракциона для катания вдоль трека 362.
[00174] Система 10 отслеживания может включать в себя один или более излучателей 14, выполненных с возможностью испускания световых пучков 28 и детекторов 16, выполненных с возможностью регистрации электромагнитного излучения, отраженного от объектов в поле зрения детектора. В проиллюстрированном варианте осуществления, излучатели 14 и детекторы 16 располагаются на потолке 380 увеселительного аттракциона 364. В других вариантах осуществления, однако, излучатели 14 и детекторы 16 могут располагаться вдоль других неподвижных компонентов увеселительного аттракциона 364, обращенных к треку 362. Каждое транспортное средство 360 аттракциона для катания может включать в себя обратно-отражающие метки 24 на своих внешних поверхностях 382. В этом контексте, система 10 отслеживания может использоваться для определения и поддержания точного счетчика количества транспортных средств 360 аттракциона для катания, присутствующего на конкретном увеселительном аттракционе 364, и связывания информации отслеживания с конкретными транспортными средствами 360 аттракциона для катания (например, когда транспортные средства 360 аттракциона для катания включают в себя обратно-отражающие метки 24 с разными оптическими качествами).
[00175] Несколько излучателей 14 и детекторов 16 могут обеспечивать избыточность, осуществляя контроль за транспортными средствами 360 аттракциона для катания по мере их перемещения вдоль трека 362. Некоторые детекторы 16 могут располагаться лучше, чем другие, для регистрации электромагнитного излучения, обратно-отраженного из некоторых зон увеселительного аттракциона 364. В некоторых вариантах осуществления, несколько излучателей 14 и детекторов 16 может располагаться под разными углами на протяжении увеселительного аттракциона 364 для обеспечения избыточного и, таким образом, более точного отслеживания различных обратно-отражающих меток 24, размещенных в увеселительном аттракционе 364. Несколько наборов излучателей 14 и детекторов 16 могут быть соединены с возможностью связи с одним и тем же блоком 18 управления или разными блоками 18 управления, для сравнения результатов от разных детекторов 16. Однако следует отметить, что отдельные детекторы 16 также могут использоваться для отслеживания трехмерной ориентации транспортных средств 360 аттракциона для катания, например, согласно методам, описанным выше со ссылкой на фиг. 9B и 9C.
[00176] Как показано, трек 362 может включать в себя ряд сложных поворотов, которые иначе было бы трудно отслеживать с использованием существующих технологий отслеживания, например, линейных кодеров. Однако, в соответствии с настоящими вариантами осуществления, трек 362 может включать в себя множество расположенных на нем обратно-отражающих меток 24, и система 10 отслеживания (включающая в себя несколько излучателей 14 и детекторов 16) может отслеживать и оценивать преграждение этих обратно-отражающих меток 24 для оценивания производительности транспортных средств 360 аттракциона для катания на треке 362.
[00177] Проиллюстрированный увеселительный аттракцион 364 также включает в себя систему 382 управления аттракционом для катания, осуществляющую связь с блоком 18 управления, и система 382 управления аттракционом для катания включает в себя схему 384 управления, выполненную с возможностью регулировать различные рабочие параметры одного или более из транспортных средств 360 аттракциона для катания. В частности, схема управления системы 382 управления аттракционом для катания может включать в себя схему 386 управления активацией и схему 388 управления торможением. Схему 386 управления активацией можно реализовать в виде программного кода, хранящегося в памяти и исполняемого одним или более процессорами, связанными с системой 142 управления парка развлечений, или можно реализовать в виде логических схем управления, локальные по отношению к увеселительному аттракциону 364.
[00178] В соответствии с настоящими вариантами осуществления, увеселительный аттракцион 364 включает в себя эти вышеописанные элементы, чтобы блок 18 управления и система 382 управления аттракционом для катания могли осуществлять контроль за работой транспортных средств 360 аттракциона для катания по мере их перемещения вдоль трека 362. Блок 18 управления и система 382 управления аттракционом для катания также может, при необходимости, регулировать скорость, торможение или другие рабочие параметры, связанные с транспортными средствами 360 аттракциона для катания в результате осуществления контроля, осуществляемого системой 10 отслеживания.
[00179] Как показано, трек 362 включает в себя вышеупомянутые сложные повороты, в частности, холм 390, кривую 392 и комбинацию холма и кривой, обозначенную как искривленный холм или искривленный склон 394. Опять же, традиционным элементам отслеживания, например линейным кодерам, может быть трудно отслеживать перемещения вдоль трека 362. Действительно, эти традиционные элементы отслеживания обычно используются для отслеживания движения вдоль прямых линий. Соответственно, теперь понятно, что использование обратно-отражающих меток 24, расположенных вдоль трека 362, могут обеспечивать улучшенное отслеживание перемещения транспортных средств 360 аттракциона для катания вдоль трека 362.
[00180] В порядке примера работы увеселительного аттракциона 364 и связанных с ним системы 10 отслеживания и системы 362 управления аттракционом для катания, излучатели 14 и детекторы 16 могут действовать для регистрации отраженного электромагнитного излучения от меток 24, расположенных на треке 362 и на транспортных средствах 360 аттракциона для катания, при наличии. Когда транспортные средства аттракциона для катания перемещаются вдоль трека 362, транспортные средства 360 аттракциона для катания заграждают некоторые из обратно-отражающих меток 24, размещенных вдоль трека 362. В некоторых вариантах осуществления, когда транспортное средство 360 аттракциона для катания работает правильно, обратно-отражающие метки 24, загражденные транспортными средствами 360 аттракциона для катания, могут не быть видимы любому из детекторов 16. Однако, согласно вариантам осуществления, где транспортные средства 360 аттракциона для катания немного приподнимаются на удалении от трека 362 (например, на высоких скоростях и крутых поворотах), все или часть одной или более обратно-отражающих меток 24, которые подлежат заграждению транспортным средством 360 аттракциона для катания, могут быть видимы, по меньшей мере, одному из детекторов 16, которые могут принимать обратно-отраженное электромагнитное излучение от незагражденной метки 24. В этом случае, система 10 отслеживания, и, в частности, блок 18 управления, может идентифицировать рисунок, связанный с этим типом ситуации, который можно лучше понять, обратившись к фиг. 25.
[00181] В частности, фиг. 25 демонстрирует вид сверху трека 362 на фиг. 24. Как показано, самое левое транспортное средство аттракциона для катания, проиллюстрированное пунктирными линиями 360A, может заграждать некоторые из обратно-отражающих меток 24, которые проиллюстрированы рисунком 3 на 3 загороженных обратно-отражающих меток (т.е. рисунок, в котором три соседних метки заграждены в двух строках). Как можно видеть из иллюстрации, незагражденные или видимые обратно-отражающие метки 24 изображены сплошными/залитыми кружками, тогда как загражденные обратно-отражающие метки 24 изображены незалитыми кружками. Второе из транспортных средств 360B аттракциона для катания также проиллюстрировано как заграждающее все обратно-отражающие метки 24 на треке 362, соответствующие геометрии транспортного средства 360 аттракциона для катания. Соответственно, блок 18 отслеживания может определить, что транспортное средство 360 аттракциона для катания движется надлежащим образом (например, с надлежащей скоростью) вдоль трека 262.
[00182] С другой стороны, иногда транспортным средствам 360 аттракциона для катания, движущимся с относительно высокой скоростью, может быть трудно правильно осуществлять навигацию по сложной кривой, связанной с искривленным склоном 394. Таким образом, как показано, третье из транспортных средств 36°C аттракциона для катания изображено как заграждающее только некоторые из обратно-отражающих меток 24, соответствующих его геометрии. Это показано на фиг. 25 как набор 2 на 3 загороженных обратно-отражающих меток 24 (т.е. первая строка из двух соседних загороженных меток напротив второй строки из трех соседних загороженных меток), причем одна из обратно-отражающих меток 24A показана не загражденной или не полностью загражденной на основании вида одного или более из детекторов 16. Блок 18 отслеживания может обрабатывать эти данные отслеживания и определять, что скорость транспортного средства 360 аттракциона для катания слишком высока при входе на искривленный склон 394, и может регулировать, с помощью системы 382 управления аттракционом для катания, скорость транспортного средства 360 аттракциона для катания. Согласно вариантам осуществления, где блок 18 отслеживания и/или система 382 управления аттракционом для катания и/или система 142 управления определяет, что такие регулировки скорости не оказывают влияния на преграждение обратно-отражающей метки 24A, блок 18 отслеживания и/или система 382 управления аттракционом для катания и/или система 142 управления может определить, что транспортное средство 360 аттракциона для катания нуждается в обслуживании, или что трек 362 может нуждаться в регулировке.
[00183] Теперь рассмотрим варианты осуществления, где путь аттракциона для катания для транспортных средств 360 аттракциона для катания не ограничивается треком 362, проиллюстрированный вариант осуществления увеселительного аттракциона 364, показанный на фиг. 26, включает в себя неограниченный путь 363 аттракциона для катания, как упомянуто выше. Неограниченный путь 363 аттракциона для катания можно рассматривать как неограниченный, поскольку путь 363 ограничивается только внешними элементами, ограничивающими путь, по которому могут перемещаться транспортные средства 360 аттракциона для катания (не сцеплением между колесными сборками и рельсами, например, в типичных американских горках). Согласно некоторым из вышеизложенных вариантов осуществления, излучатели 14 и детекторы 16 могут располагаться на разнообразных внешних элементах увеселительного аттракциона 364. Например, как показано, излучатели 14 и детекторы 16 могут располагаться на зданиях 278, мачтах 280 или аналогичных конструкциях, обеспечивая вид пути 363.
[00184] Как показано, система 10 отслеживания может быть более тесно вовлеченной в движение транспортных средств 360 аттракциона для катания по сравнению с вариантами осуществления, изложенными выше со ссылкой на фиг. 22-25. Таким образом, транспортными средствами 360 аттракциона для катания, показанными на фиг. 26, можно управлять, по существу, в реальном времени с помощью системы 382 управления аттракционом для катания. В частности, система 382 управления аттракционом для катания может включать в себя схему 400 связи, например, приемопередатчик, выполненный с возможностью осуществления связи с соответствующими блоками 402 управления транспортных средств 360 аттракциона для катания. Как показано, соответствующая схема 402 управления транспортных средств 360 аттракциона для катания может включать в себя схему 404 связи, например, приемопередатчик, один или более процессоров 406 и один или более блоков 408 памяти, которые выполнены с возможностью выполнения различных процедур управления в ответ на инструкции, принятые от системы 382 управления аттракционом для катания. Например, схема 402 управления транспортных средств 360 аттракциона для катания может быть выполнена с возможностью регулировать скорость и/или направление транспортных средств аттракциона для катания вдоль пути 363.
[00185] Инструкции, подаваемые на схему 402 управления системой 382 управления аттракционом для катания, могут зависеть от информации отслеживания, обеспеченной одним или более блоками 18 управления, связанными с одной или более системами 10 отслеживания, размещенными на протяжении увеселительного аттракциона 364. Например, система 382 управления аттракционом для катания может, приняв информацию отслеживания, осуществлять различные процедуры, хранящиеся в памяти 410, с использованием одного или более связанных процессоров 412 для регулировки работы одного или более из транспортных средств 360 аттракциона для катания.
[00186] Информация отслеживания, обеспеченная системами 10 отслеживания, размещенными на протяжении зоны аттракциона, может включать в себя, в порядке примера, информацию, относящуюся к обратно-отражающим меткам 24, расположенным снаружи транспортных средств 360 аттракциона для катания, и/или обратно-отражающей краске, используемой в качестве обратно-отражающих меток 24 на транспортном средстве 360. Информация отслеживания может быть подобной, в целом, изложенной выше со ссылкой на фиг. 3-9, где системы 10 отслеживания используют один или более из детекторов 16 для отслеживания транспортных средств 360 аттракциона для катания в пространстве и времени в двух измерениях или, при необходимости, в трех измерениях. Поскольку путь 363 аттракциона для катания не ограничен, может быть желательно отслеживать транспортные средства 360 аттракциона для катания в пространстве и времени в трех пространственных измерениях.
[00187] В соответствии с некоторыми вариантами осуществления настоящего изобретения, система 10 отслеживания и система 382 управления аттракционом для катания может координировать осуществлять блочное управление, где путь 363 делится на блоки или зоны, в которых заранее определенному количеству транспортных средств 360 аттракциона для катания разрешено (например, согласно правилам, хранящимся в памяти 22) занимать конкретный блок. Соответственно, путь 363 проиллюстрирован в порядке примера как включающий в себя множество таких блоков, включающих в себя первый блок 414, связанный с посадкой на пустое транспортное средство 416 аттракциона для катания (например, связанное с зоной 418 посадки увеселительного аттракциона 364, где люди 70 стоят в очереди позади входа 420). Множество блоков также включает в себя второй блок 422 и третий блок 424, отделенные друг от друга и других блоков обратно-отражающими граничными линиями 426. Система 10 отслеживания может быть выполнена с возможностью отслеживания преграждения граничных линий 426 для определения, пересекли ли транспортные средства 360 аттракциона для катания граничные линий между некоторыми из блоков, для определения, располагается ли в каждом из блоков надлежащее количество транспортных средств 360. Дополнительно или альтернативно, система 10 отслеживания может осуществлять контроль за положением каждого из транспортных средств 360 с помощью обратно-отражающих меток 24, расположенных на транспортных средствах 360 относительно граничных линий 426. Если система 10 отслеживания определяет, что в некоторых блоках или в непосредственной близости к ним присутствует слишком много транспортных средств 360, система 10 отслеживания может предписывать некоторым транспортным средствам 360 останавливаться, пока транспортные средства 360 не покинут этот конкретный блок. В других вариантах осуществления, система 382 управления аттракционом для катания может инициировать активацию элемента, который предписывает открывать дополнительные дорожки некоторым транспортным средствам 360. Действительно, такое блочное управление может применяться не только к неограниченному пути 363, но и к ограниченному пути 362, как описано выше.
[00188] Согласно варианту осуществления, представленному на фиг. 26, путь 363 может включать в себя вариант осуществления сетки 90 в четвертом блоке 428, позволяющей системе 10 отслеживания осуществлять контроль за преграждением меток 24 и отслеживать положения и перемещение транспортных средств 360. Система 10 отслеживания может, в некоторых вариантах осуществления, применять границу к каждому из транспортных средств 360 в четвертом блоке 428 (или любом другом блоке) для поддержания некоторого расстояния между транспортными средствами 360 во избежание столкновений и поддержания существенного перемещения транспортных средств 360 вдоль пути, например, как изложено выше со ссылкой на фиг. 13-17. Кроме того, система 10 отслеживания может использовать сетку 90 для создания у ездоков ощущения полной свободы вести транспортное средство 360 в открытой зоне, которая фактически электронно ограничена. Действительно, ездокам может быть разрешено направлять транспортные средства 360 куда угодно в сетке, но не за ее пределы.
[00189] Система 10 отслеживания, в некоторых вариантах осуществления, может предписывать одному из транспортных средств 360 (например, с помощью системы 382 управления аттракционом для катания) для остановки. Например, система 10 отслеживания может определить, что транспортное средство 360 вблизи граничной линии 426 между первым и четвертым блоками 414, 428 располагается слишком близко к первому блоку 414, поскольку незанятое транспортное средство 416 еще не загружено. В этом сценарии, система 10 отслеживания может предписывать транспортному средству 360 останавливаться (например, с помощью системы 382 управления аттракционом для катания). Однако система 10 отслеживания также может предписывать запуск одного или более эффектов представления, чтобы остановка выглядела намеренной (т.е. частью аттракциона для катания) для людей на остановленном транспортном средстве 360. Когда система 10 отслеживания определяет, что транспортное средство 416 загружено и начинает движение, система 10 отслеживания может также повторно инициировать (или повторно разрешать) движение транспортного средства 360. Действительно, система 10 отслеживания может, вместо того, чтобы управлять всеми аспектами перемещения транспортных средств 360, отправлять, при необходимости, только сигналы ʺидтиʺ или ʺне идтиʺ, которые позволяют или запрещают перемещение.
[00190] Фиг. 27 иллюстрирует другой вариант осуществления, согласно которому система 10 отслеживания может использоваться для управления перемещением транспортных средств 360 аттракциона для катания. В частности, на фиг. 27 показан вид в вертикальном разрезе варианта осуществления аттракциона 364, в котором транспортное средство 360 аттракциона для катания направляется вдоль направляющей 440, которую можно рассматривать для представления более конкретного варианта осуществления неограниченного пути 363. Направляющая 440, как показано, включает в себя множество обратно-отражающих меток 24 в воронкообразном рисунке 442, которые могут окончательно функционировать для предписания транспортному средству 360 аттракциона для катания направляться вдоль конкретной траектории вдоль пути 440 и к заранее определенному положению 444.
[00191] В частности, проиллюстрированный рисунок 442 образован первым множеством обратно-отражающих меток 446, расположенных на первой стороне 448 пути 440, и вторым множеством обратно-отражающих меток 450, расположенных на второй стороне 452 пути 440. Первое и второе множества обратно-отражающих меток 446, 450 разнесены на расстояние, которое изменяется в направлении к заранее определенному положению 444. Как показано на левой стороне пути 440, расстояние изображено как W1, представляя первую ширину, и, при движении вправо и к заранее определенному положению 444, ширина изменяется до второй ширины W2, которая меньше первой ширины W1. Таким образом, сходящиеся множества обратно-отражающих меток 446, 450 образуют суженное пространство 454, где обратно-отражающие метки 24 отсутствуют. Как более подробно описано ниже, система 10 отслеживания и система 382 управления аттракционом для катания могут действовать для удержания транспортного средства 360 аттракциона для катания в этом суженном пространстве 454.
[00192] Как также проиллюстрировано, транспортное средство 360 аттракциона для катания может включать в себя различные элементы, которые позволяют человеку 70 в транспортном средстве 360 аттракциона для катания перемещать транспортное средство 360 аттракциона для катания в нескольких разных направлениях. В целом, эти элементы транспортного средства 360 аттракциона для катания функционируют так, чтобы человек 70 ощущал полный контроль над транспортным средством 360 аттракциона для катания, тогда как транспортное средство 360, в действительности, направляется в общем направлении к заранее определенному положению 444. Элементы включают в себя, в порядке примера, систему 456 привода транспортного средства, которая может осуществлять связь с системой 10 отслеживания и/или системой 382 управления аттракционом для катания с помощью приемопередатчика 404.
[00193] Система 456 привода транспортного средства, в целом, включает в себя систему 458 привода и систему 460 рулевого управления, которые выполнены с возможностью перемещения транспортного средства 360 вдоль пути 440 и также предоставляют человеку 70 степень контроля над перемещением транспортного средства 360. Система 458 привода может включать в себя один или более электромеханических приводов (например, электродвигателей) и соответствующих систем питания, один или более двигателей внутреннего сгорания, одно или более движительных устройств и т.д. Система 460 рулевого управления может включать в себя любой подходящий набор элементов, которые позволяют осуществлять рулевое управление транспортного средства 360, например, например, систему реечной передачи, рулевую колонку и т.д.
[00194] Как изложено выше, система 10 отслеживания и система 382 управления аттракционом для катания могут действовать совместно с системой 456 привода транспортного средства для регулировки степени контроля, которую человек 70, управляющий транспортным средством 360 аттракциона для катания, имеет над общим направлением, в котором перемещается транспортное средство 360 аттракциона для катания. Например, система 10 отслеживания может отслеживать положение и перемещение транспортного средства 360 аттракциона для катания и отправлять эту информацию отслеживания на систему 382 управления аттракционом для катания. Альтернативно, система 10 отслеживания может обрабатывать данные отслеживания для обеспечения ввода инструкций в систему 382 управления аттракционом для катания.
[00195] В порядке примера функционирования увеселительного аттракциона 364, транспортное средство 360 аттракциона для катания может перемещаться вдоль пути 440, будучи отслеживаемым системой 10 отслеживания с использованием любого одного или комбинации вышеописанных методов. Система 10 отслеживания может также, например, рассматривать первое и второе множества обратно-отражающих меток 446, 450 как граничные элементы, где система 10 отслеживания контролирует положение транспортного средства 360 относительно первого и второго множеств обратно-отражающих меток 446, 450, и определяет, вторглось ли транспортное средство 360 в какое-либо из множеств, или может, на основании определенной траектории, вторгаться в какое-либо из множеств.
[00196] Если система 10 отслеживания определяет, что транспортное средство 360 требует регулировки (например, согласно сохраненному набору инструкций или правил, связанному с аттракционом 364), система 10 отслеживания может отправлять надлежащие инструкции на систему 382 управления аттракционом для катания для предписания регулировки ориентации или модуля вектора перемещения транспортного средства. В соответствии с проиллюстрированным вариантом осуществления, регулировку можно производить таким образом, чтобы направлять транспортное средство 360 к заранее определенному положению 444. Соответственно, хотя человеку 70 может казаться, что он полностью управляет транспортным средством 360, он медленно продвигается к положению 444.
[00197] Увеселительный аттракцион 364 также может включать в себя оборудование 12 парка развлечений для создания причин представления для транспортного средства 360 для перемещения вдоль пути 440 к положению 444. Например, как показано, человек 70 может, после идентификации оборудования 12 парка развлечений, например, эффекта представления (например, пламени, дисплея), направлять транспортное средство 360 аттракциона для катания к оборудованию 12. При этом человек 70 предписывает транспортному средству 360 направляться дальше в суженную зону 454, и, таким образом, приближаться к положению 444.
[00198] Дополнительные варианты осуществления пути 440 изображены в видах сверху на фиг. 28 и 29. В частности, на фиг. 28, путь 440 можно рассматривать как вид сверху пути 440 на фиг. 27, где перемещение транспортного средства 360 ограничивается суженной зоной 454, где обратно-отражающие метки 24 отсутствуют. Также, как показано на фиг. 28, система 10 отслеживания может использовать несколько излучателей 14 и детекторов 16, чтобы блок 18 управления мог определять векторную ориентацию транспортного средства 360 на пути 440 и также обеспечивать дальность.
[00199] Как показано на фиг. 29, в некоторых вариантах осуществления, могут использоваться слои разных обратно-отражающих меток 24. В частности, фиг. 29 демонстрирует вариант осуществления направляющей 440, в которой каждое из первого множества меток 446 и второго множества меток 450 включает в себя первый поднабор обратно-отражающих меток 464 и второй поднабор обратно-отражающих меток 466, которые включают в себя разные обратно-отражающие элементы или обратно отражают разные длины волны. Первый поднабор обратно-отражающих меток 464 и второй поднабор обратно-отражающих меток 466 располагаются в разных поперечных положениях относительно направляющей 440, и можно рассматривать как слои, используемые для инициирования движения транспортных средств 360 аттракциона для катания вдоль пути 440 к заранее определенному положению 444 по-разному, хотя ездокам в транспортных средствах 360 может казаться, что транспортные средства могут перемещаются за пределы пути 440, что, в целом, изображено стрелками 470.
[00200] Например, как показано в отношении первого транспортного средства 360A аттракциона для катания, система 10 отслеживания может обнаруживать, что первое транспортное средство 360A аттракциона для катания заградило участок первого поднабора обратно-отражающих меток 464, и может инициировать первый отклик в первом транспортном средстве 360A, например, распыление первого транспортного средства 360A, замедление первого транспортного средства 360A, или некоторую другую тактильную обратную связь, которая побуждает ездоков направлять первое транспортное средство 360A обратно на путь 440. В случаях, когда ездоки продолжают направлять транспортные средства 360 за пределы пути 440, как показано в отношении второго транспортного средства 360B аттракциона для катания, система 10 отслеживания может обнаруживать, что второе транспортное средство 360B аттракциона для катания заградило участок второго поднабора обратно-отражающих меток 466, и может инициировать второй отклик во втором транспортном средстве 360B, более сильный, чем первый отклик, например, остановку второго транспортного средства 360B, поворот второго транспортного средства 360B, или некоторое другое управление, которое возвращает второе транспортное средство 360B на путь 440.
[00201] Фиг. 30 демонстрирует вариант осуществления направляющей 440, где, вместо ограничения транспортного средства суженной зоной, в которой обратно-отражающие метки отсутствуют, как показано на фиг. 27-29, увеселительный аттракцион 364 альтернативно использует систему 10 отслеживания, чтобы гарантировать, что транспортное средство 360 остается над путем 480 по сетке, установленным конкретным рисунком обратно-отражающих меток 24. Обратно-отражающие метки 24, как показано, образуют суженный рисунок, благодаря чему, чтобы оставаться над, по меньшей мере, некоторыми из меток 24, транспортное средство 360 должно перемещаться, в целом, по заранее определенной траектории 482, а не по траектории 484, которая предписывает транспортному средству 360 прекращать заграждать, по меньшей мере, некоторые из меток 24. Для сужения пути 440 аналогично изложенному выше со ссылкой на фиг. 27 и 28, путь 480 по сетке сужается от первой ширины W1 до второй ширины W2. Система 10 отслеживания, соответственно, может осуществлять контроль за преграждением сетки для определения информации модуля, ориентации и смысла вектора, относящейся к перемещению транспортного средства 360, и может осуществлять некоторые регулировки этих или других параметров (например, с использованием системы 382 управления аттракционом для катания), если система 10 отслеживания определяет, что транспортное средство 360 отклонилось или может отклониться от пути 480 по сетке.
[00202] Хотя здесь были проиллюстрированы и описано лишь некоторые признаки настоящих вариантов осуществления, специалисты в данной области техники могут предложить многие модификации и изменения. Поэтому следует понимать, что нижеследующая формула изобретения призвана охватывать все подобные модификации и изменения в рамках истинной сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| УЛУЧШЕННАЯ ИНТЕРАКТИВНОСТЬ В СРЕДЕ ПАРКА РАЗВЛЕЧЕНИЙ С ИСПОЛЬЗОВАНИЕМ ПАССИВНЫХ ОТСЛЕЖИВАЮЩИХ ЭЛЕМЕНТОВ | 2015 |
|
RU2646313C1 |
| ОПТИЧЕСКАЯ СИСТЕМА ОТСЛЕЖИВАНИЯ ДЛЯ АВТОМАТИЗАЦИИ ЭЛЕМЕНТОВ ПАРКА РАЗВЛЕЧЕНИЙ | 2015 |
|
RU2693322C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ НА МНОГОУРОВНЕВЫХ ПАРКОВКАХ И НА ПЕРЕКРЕСТКАХ | 2015 |
|
RU2669003C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ТРАНСПОРТНЫХ СРЕДСТВ НА МНОГОУРОВНЕВЫХ ПАРКОВКАХ И НА ПЕРЕКРЕСТКАХ | 2015 |
|
RU2767508C2 |
| ОПТИЧЕСКОЕ ОТСЛЕЖИВАНИЕ ДЛЯ УПРАВЛЕНИЯ ЭЛЕМЕНТАМИ ПИРОТЕХНИЧЕСКОГО ШОУ | 2015 |
|
RU2667388C2 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ДЛЯ ИСПОЛЬЗОВАНИЯ ПРИ НАБЛЮДЕНИИ ЗА ОБОРУДОВАНИЕМ ПАРКА РАЗВЛЕЧЕНИЙ | 2015 |
|
RU2676874C2 |
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ДЛЯ ИСПОЛЬЗОВАНИЯ ПРИ НАБЛЮДЕНИИ ЗА ОБОРУДОВАНИЕМ ПАРКА РАЗВЛЕЧЕНИЙ | 2015 |
|
RU2763166C2 |
| СИСТЕМА ОТСЛЕЖИВАНИЯ ЭЛЕМЕНТА В ПАРКЕ РАЗВЛЕЧЕНИЙ | 2015 |
|
RU2767514C2 |
| СИСТЕМА ОТСЛЕЖИВАНИЯ ЭЛЕМЕНТА В ПАРКЕ РАЗВЛЕЧЕНИЙ | 2015 |
|
RU2667628C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ПАССИВНОЙ ПАЛОЧКИ И АКТИВАЦИИ ЭФФЕКТА НА ОСНОВЕ ОБНАРУЖЕННОЙ ТРАЕКТОРИИ ПАЛОЧКИ | 2014 |
|
RU2678468C2 |

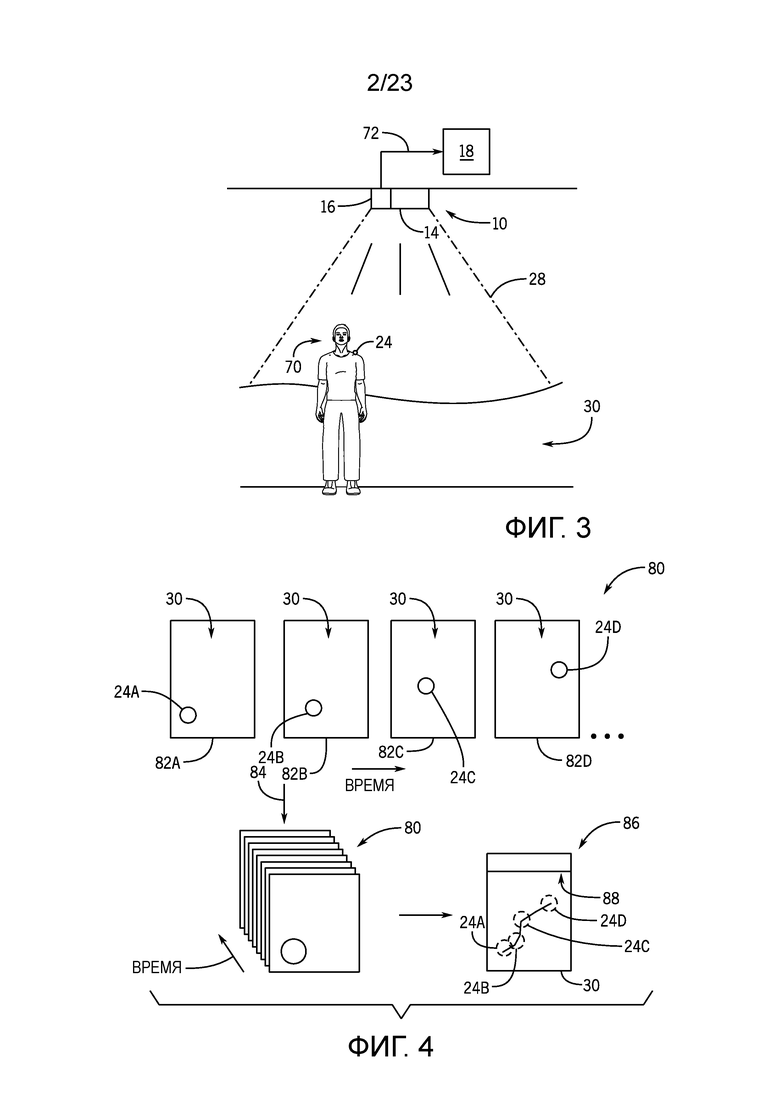
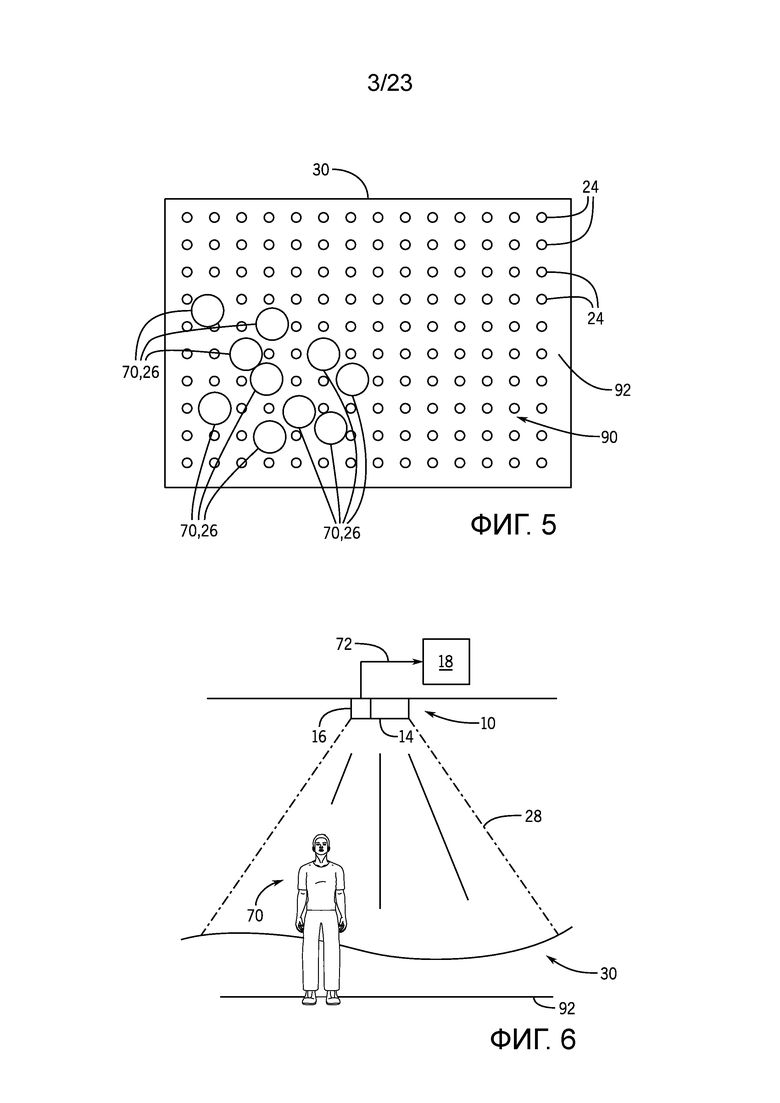


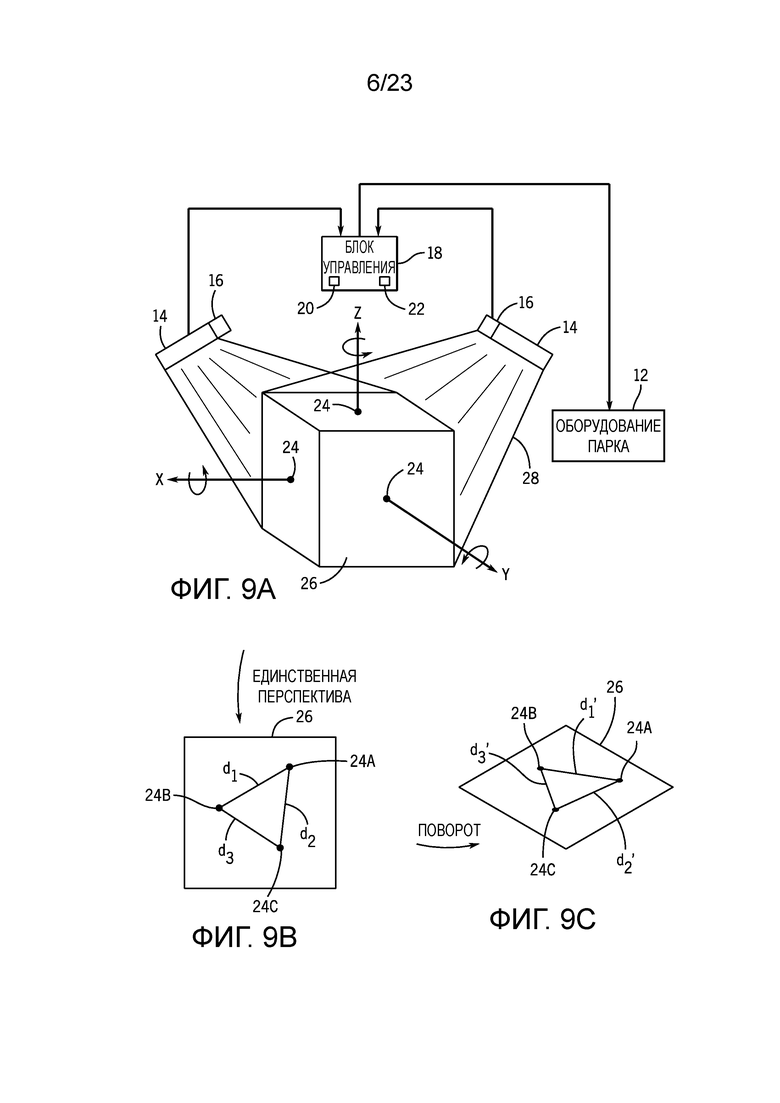


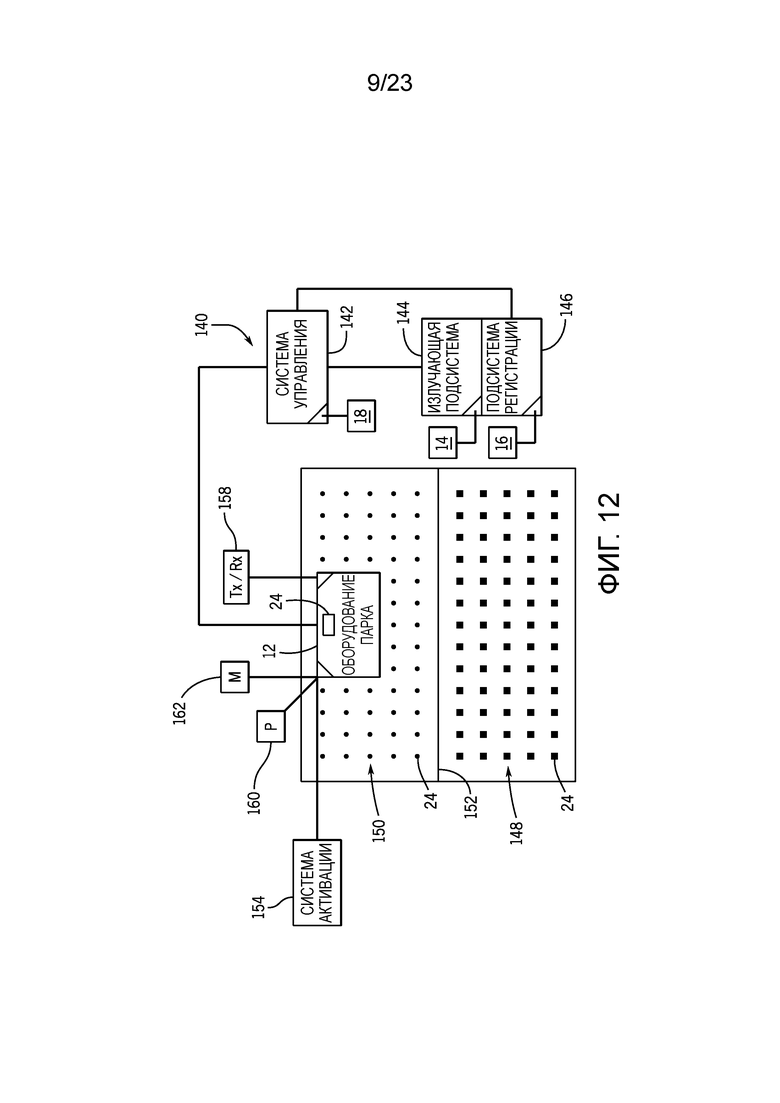


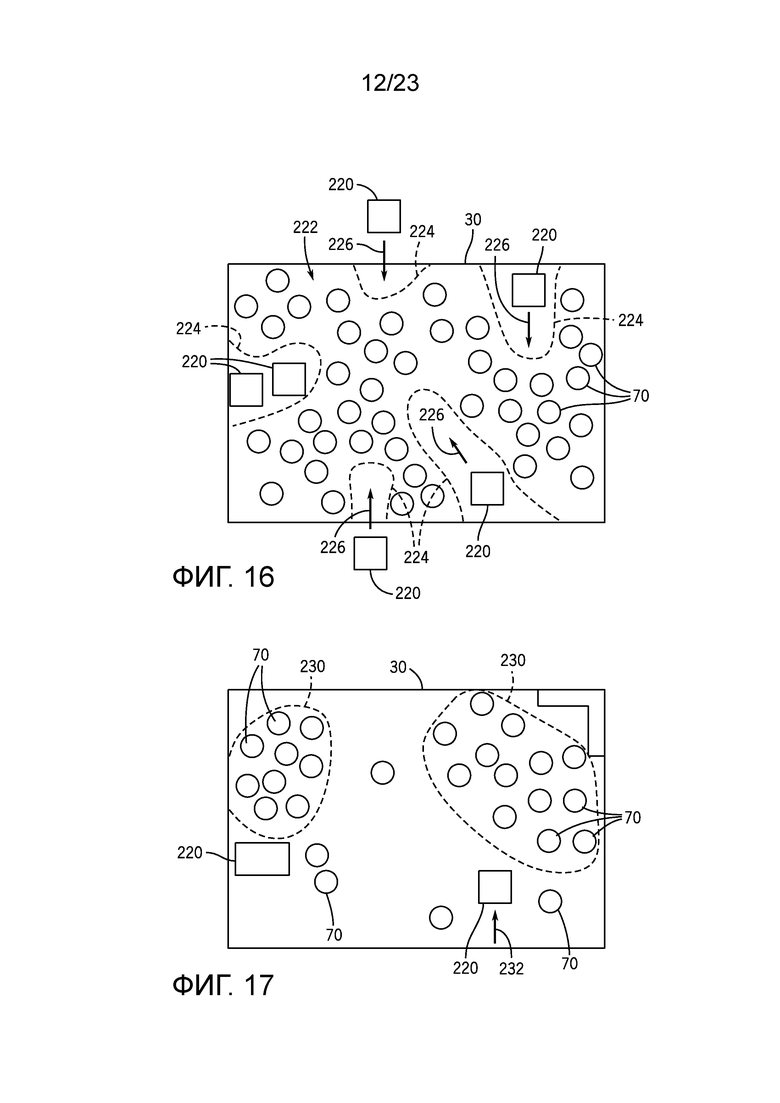
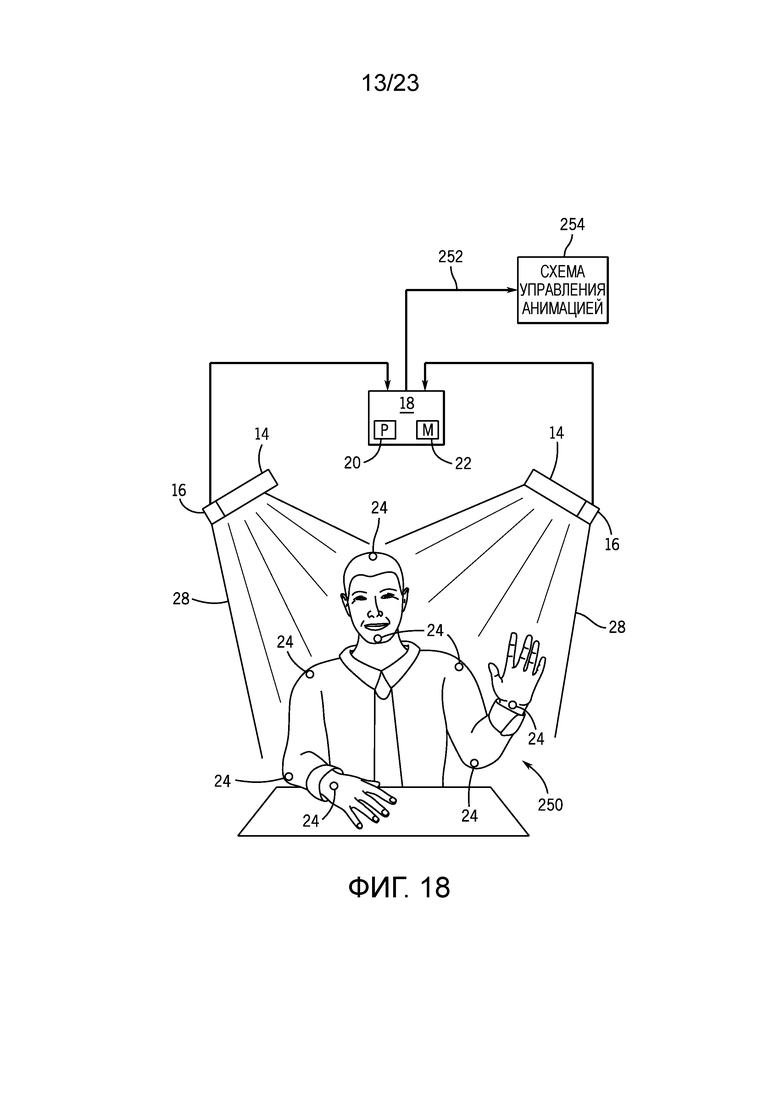


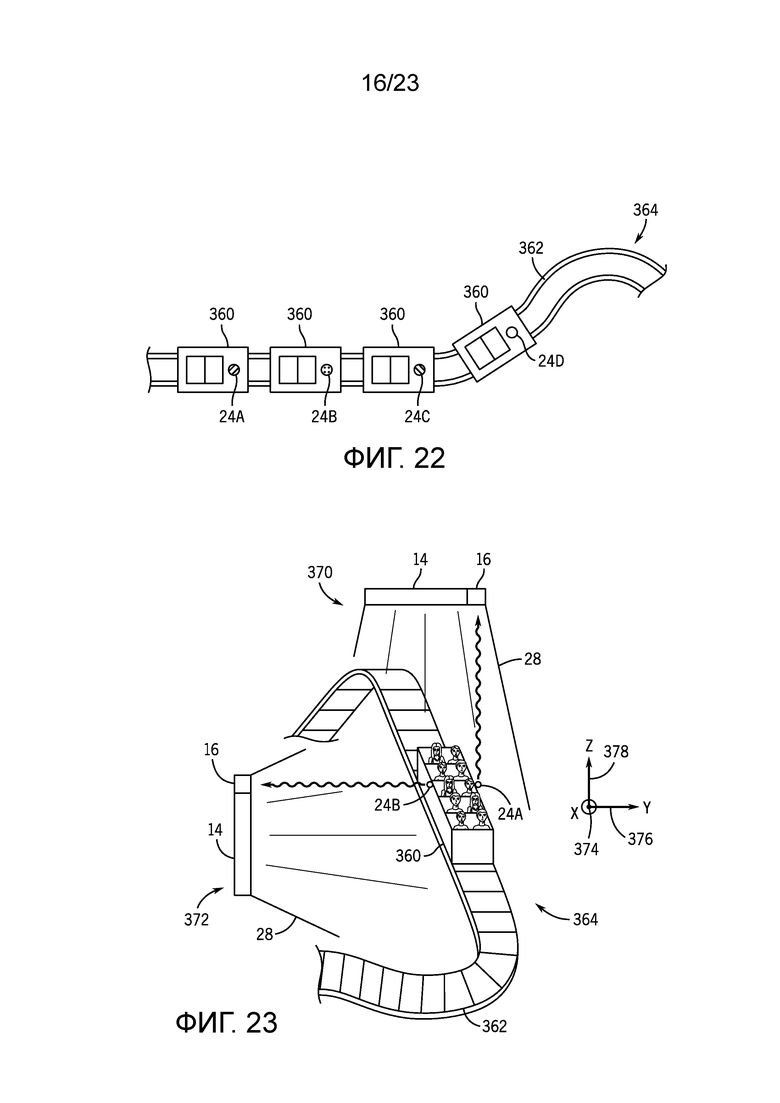

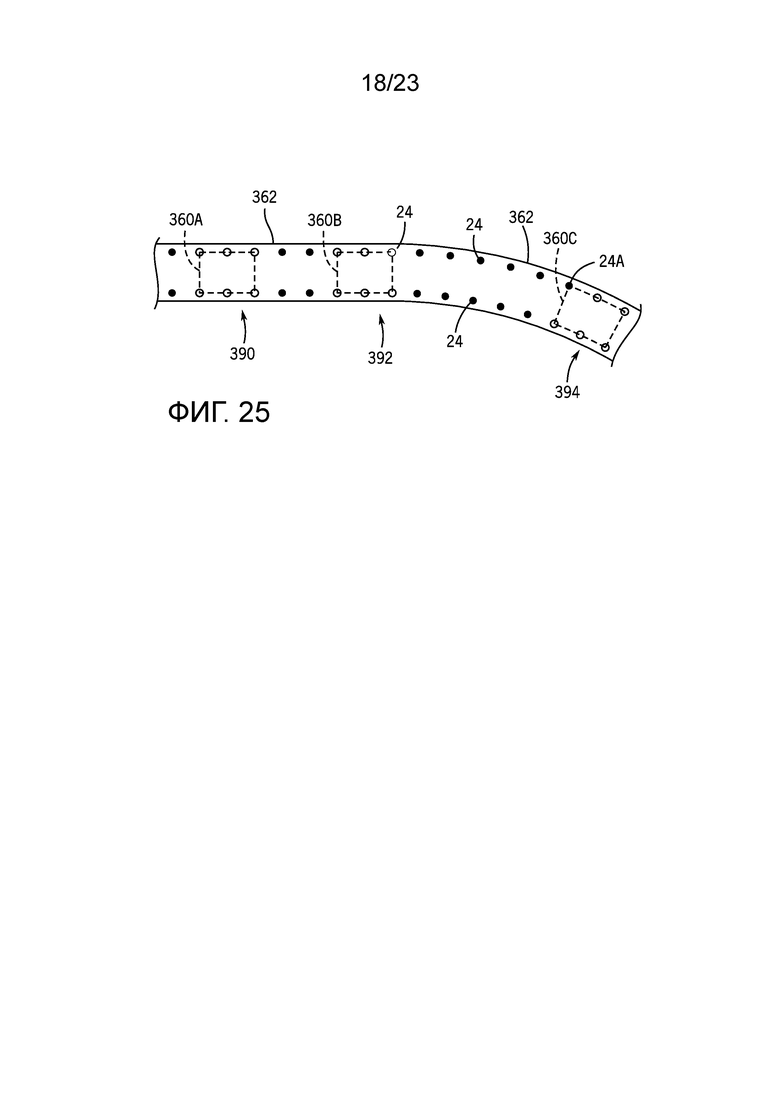
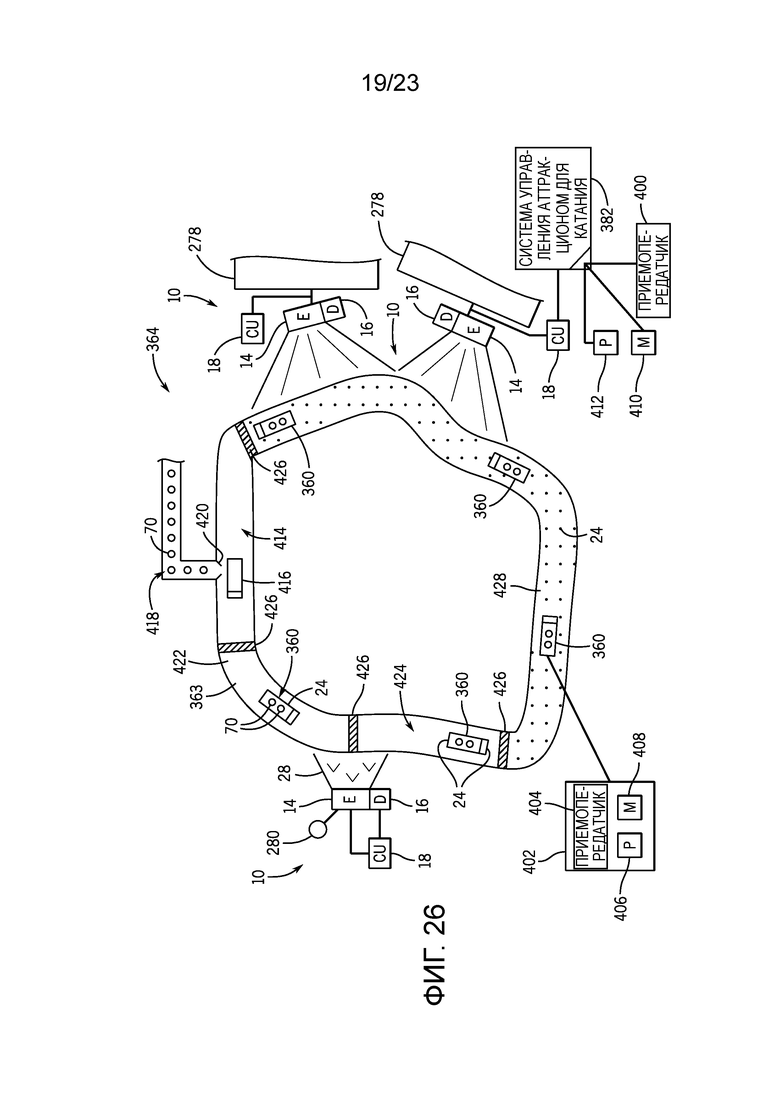
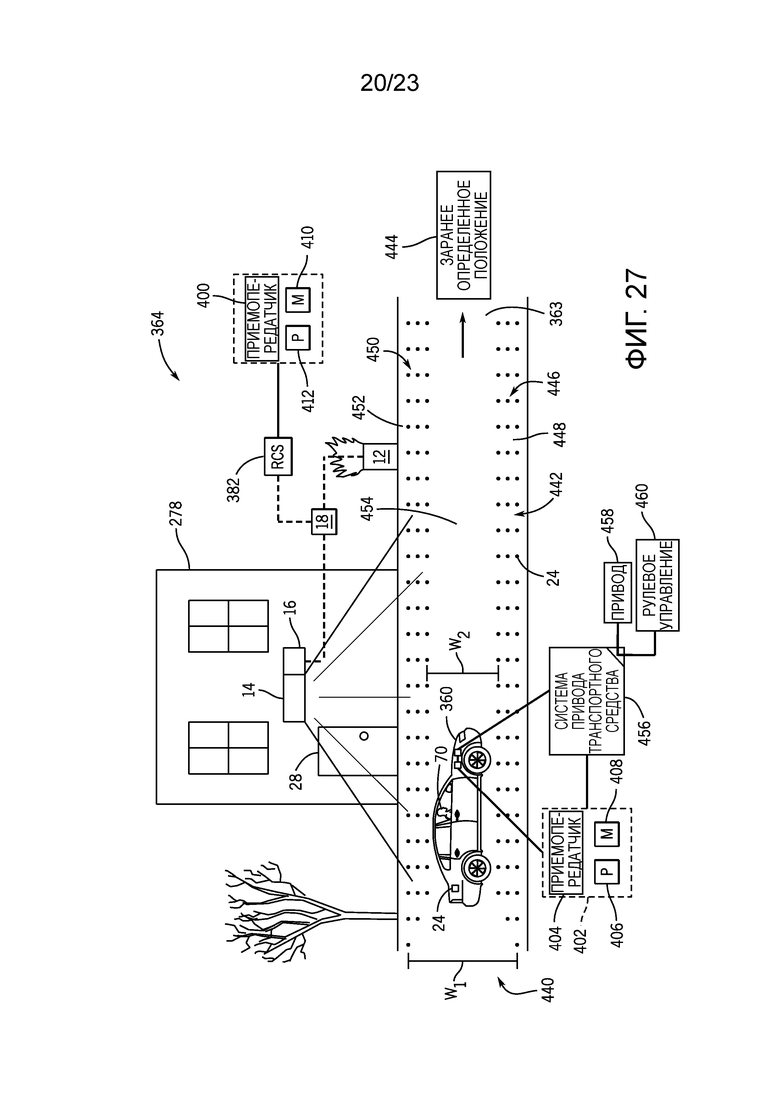
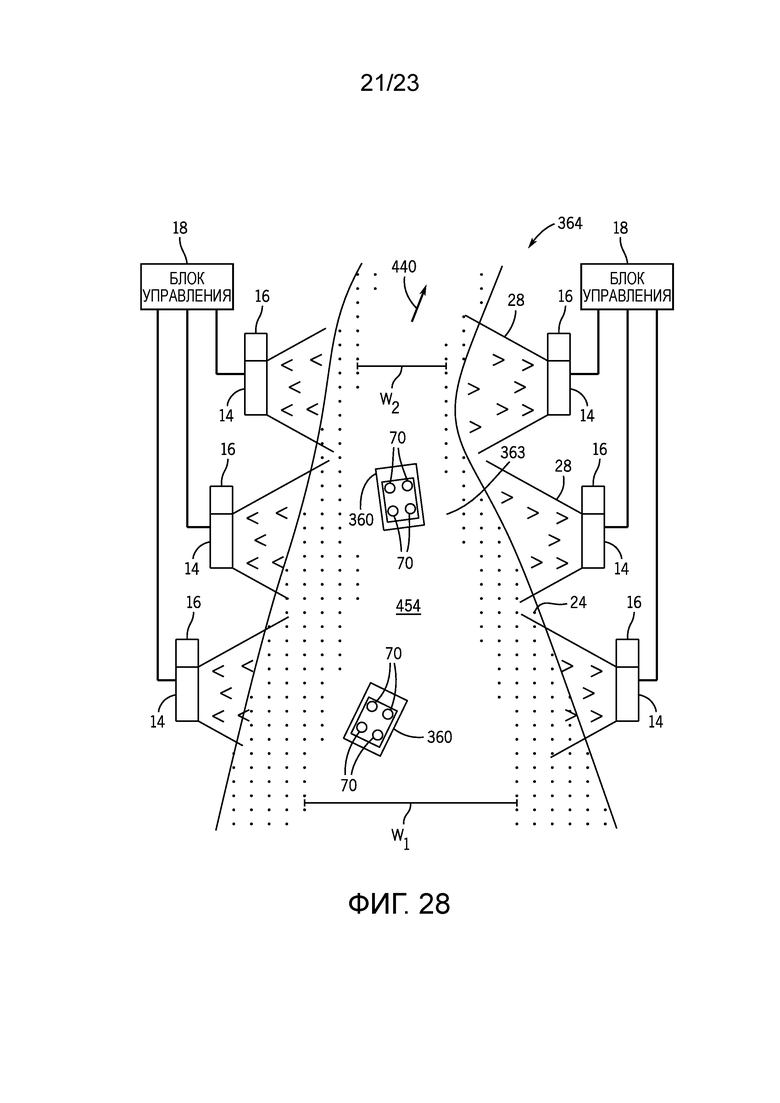


Изобретение относится к области систем отслеживания. Технический результат заключается в повышении точности регистрирования и отслеживания транспортного средства аттракциона для катания. Система включает в себя излучатель, выполненный с возможностью испускания электромагнитного излучения в зоне, детектор, выполненный с возможностью регистрации электромагнитного излучения, отраженного из зоны, и блок управления, выполненный с возможностью оценивания сигналов от детектора и управления транспортными средствами аттракциона для катания или другим оборудованием в результате этого оценивания. 2 н. и 17 з.п. ф-лы, 32 ил.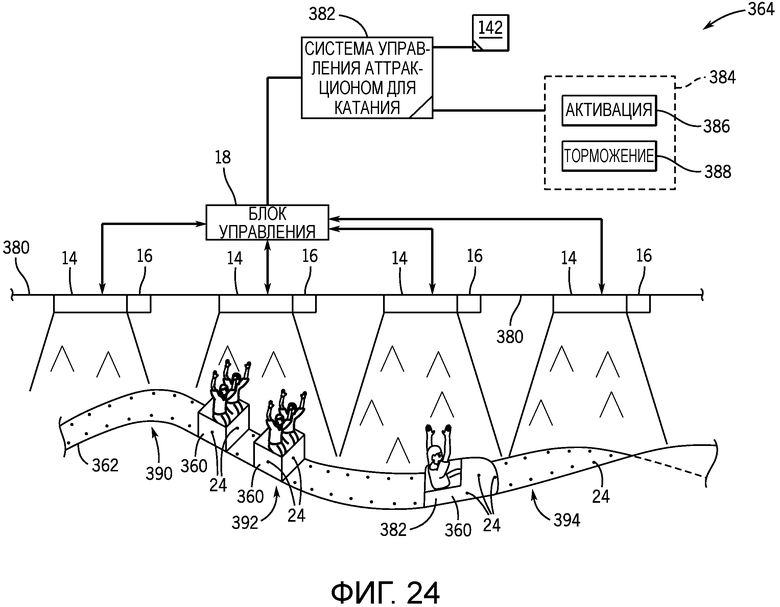
1. Система аттракциона для катания парка развлечений, содержащая:
транспортное средство аттракциона для катания, расположенное на пути аттракциона для катания и выполненное с возможностью перемещения вдоль пути аттракциона для катания;
множество обратно-отражающих меток, расположенных на транспортном средстве аттракциона для катания, вдоль пути аттракциона для катания или и там, и там;
излучающую подсистему, выполненную с возможностью испускания электромагнитного излучения к множеству обратно-отражающих меток;
подсистему регистрации, выполненную с возможностью регистрации рисунка обратного отражения электромагнитного излучения от множества обратно-отражающих меток с одновременной фильтрацией электромагнитного излучения, которое не является обратно-отраженным; и
систему управления, соединенную с возможностью связи с подсистемой регистрации и содержащую схему обработки, выполненную с возможностью:
осуществлять контроль за рисунком обратного отражения электромагнитного излучения от множества обратно-отражающих меток на предмет изменений; и
отслеживать перемещение транспортного средства аттракциона для катания в пространстве и времени на основании изменений в рисунке обратно-отраженного электромагнитного излучения, зарегистрированного подсистемой регистрации.
2. Система по п. 1, в которой подсистема регистрации содержит по меньшей мере одну регистрационную камеру, имеющую по меньшей мере один оптический фильтр, и вид сверху пути аттракциона для катания, причем по меньшей мере один оптический фильтр выполнен с возможностью фильтрации электромагнитного излучения, которое не является обратно-отраженным, не фильтруя при этом электромагнитное излучение, обратно-отраженное множеством обратно-отражающих меток.
3. Система по п. 1, в которой путь аттракциона для катания содержит рельсовую систему, и множество обратно-отражающих меток содержит обратно-отражающие метки, расположенные на рельсовой системе, причем схема обработки системы управления выполнена с возможностью осуществления контроля за обратно-отраженным электромагнитным излучением от обратно-отражающих меток на треке на предмет перехода от первого рисунка обратно-отраженного электромагнитного излучения ко второму рисунку обратно-отраженного электромагнитного излучения.
4. Система по п. 3, в которой схема обработки системы управления выполнена с возможностью:
коррелировать участки первого рисунка, больше не присутствующие во втором рисунке, с рисунком обратно-отражающих меток на треке, загороженных транспортным средством аттракциона для катания по времени; и
определять векторную ориентацию перемещения транспортного средства аттракциона для катания на треке на основании рисунка обратно-отражающих меток на треке, загороженных транспортным средством аттракциона для катания.
5. Система по п. 4, в которой схема обработки выполнена с возможностью поддержания заранее определенного соотношения между векторной ориентацией и треком.
6. Система по п. 3, в которой схема обработки системы управления выполнена с возможностью:
коррелировать участки первого рисунка, больше не присутствующие во втором рисунке, с рисунком обратно-отражающих меток на треке, загороженных транспортным средством аттракциона для катания;
сравнивать рисунок обратно-отражающих меток на треке, загороженных транспортным средством аттракциона для катания, с сохраненной геометрией транспортного средства аттракциона для катания; и
идентифицировать, имеют ли сохраненная геометрия транспортного средства аттракциона для катания и рисунок обратно-отражающих меток на треке, загороженных транспортным средством аттракциона для катания, заранее определенное геометрическое соотношение.
7. Система по п. 6, в которой схема обработки системы управления выполнена с возможностью управления по меньшей мере одним рабочим параметром транспортного средства аттракциона для катания для поддержания заранее определенного геометрического соотношения.
8. Система по п. 1, содержащая также устройство эффекта, расположенное вдоль трека и осуществляющее связь с системой управления, и при этом схема обработки системы управления выполнена с возможностью определять, на основании отслеживаемого положения и перемещения транспортного средства аттракциона для катания и сохраненного положения устройства эффекта, положения транспортного средства аттракциона для катания относительно устройства эффекта, и при этом схема обработки системы управления выполнена с возможностью запуска устройства эффекта, когда положение транспортного средства аттракциона для катания находится в пределах заранее определенного расстояния до устройства эффекта.
9. Система по п. 1, в которой:
множество обратно-отражающих меток содержит набор обратно-отражающих меток, расположенных на пути в заранее определенном соотношении относительно направления предусмотренного перемещения транспортного средства аттракциона для катания, причем направление предусмотренного перемещения ориентировано к заранее определенному положению вдоль пути;
транспортное средство аттракциона для катания содержит схему связи, выполненную с возможностью осуществления связи с системой управления, и систему привода, выполненную с возможностью обеспечения рулевого управления и управления скоростью транспортного средства аттракциона для катания; и
схема обработки системы управления выполнена с возможностью поддержания транспортного средства аттракциона для катания, в целом, в направлении предусмотренного перемещения, по времени, на основании контролируемого обратного отражения от обратно-отражающих меток на пути.
10. Система по п. 9, в которой множество обратно-отражающих меток содержит первый набор обратно-отражающих меток, расположенных на первой стороне пути, и второй набор обратно-отражающих меток, расположенных на второй стороне пути, причем первая и вторая стороны пути находятся на противоположных поперечных продолжениях пути относительно направления предусмотренного перемещения транспортного средства аттракциона для катания, и при этом схема обработки выполнена с возможностью:
идентифицировать преграждение обратно-отражающих меток первого набора обратно-отражающих меток или второго набора обратно-отражающих меток, или обоих, на основании перехода от первого рисунка обратно-отраженного электромагнитного излучения ко второму рисунку обратно-отраженного электромагнитного излучения, в котором участок первого рисунка больше не присутствует;
коррелировать преграждение обратно-отражающих меток с присутствием транспортного средства аттракциона для катания; и
регулировать вектор перемещения транспортного средства аттракциона для катания для возвращения транспортного средства аттракциона для катания в область пути между первым и вторым наборами обратно-отражающих меток с использованием системы привода транспортного средства аттракциона для катания.
11. Система по п. 10, в которой первый и второй наборы обратно-отражающих меток сходятся друг к другу, благодаря чему, область пути между первым и вторым наборами обратно-отражающих меток сужается к заранее определенному положению.
12. Система по п. 9, в которой множество обратно-отражающих меток содержит набор обратно-отражающих меток, расположенных в направлении предусмотренного перемещения транспортного средства аттракциона для катания и в суженной геометрии, и при этом суженная геометрия набора обратно-отражающих меток сужается к заранее определенному положению.
13. Система по п. 1, в которой схема обработки выполнена с возможностью:
идентифицировать преграждение обратно-отражающих меток набора обратно-отражающих меток на основании перехода от первого рисунка обратно-отраженного электромагнитного излучения ко второму рисунку обратно-отраженного электромагнитного излучения, в котором участок первого рисунка больше не присутствует;
коррелировать преграждение обратно-отражающих меток с присутствием транспортного средства аттракциона для катания; и
поддерживать преграждение, по меньшей мере, части набора обратно-отражающих меток транспортным средством аттракциона для катания с использованием системы привода транспортного средства аттракциона для катания для поддержания векторной ориентации перемещения транспортного средства аттракциона для катания, в целом, в направлении предусмотренного перемещения.
14. Система по п. 1, в которой множество обратно-отражающих меток содержит по меньшей мере три обратно-отражающие метки, расположенные на разных сторонах транспортного средства аттракциона для катания, и при этом подсистема регистрации содержит по меньшей мере две детекторные камеры, выполненные с возможностью регистрации обратно-отраженного электромагнитного излучения от по меньшей мере трех обратно-отражающих меток с одновременной фильтрацией электромагнитного излучения, которое не является обратно-отраженным, и при этом схема обработки системы управления выполнена с возможностью отслеживания транспортного средства аттракциона для катания в пространстве и времени в трех пространственных измерениях на основании обратно-отраженного электромагнитного излучения от по меньшей мере трех обратно-отражающих меток.
15. Система по п. 14, в которой схема обработки системы управления выполнена с возможностью отслеживания транспортного средства аттракциона для катания в пространстве и времени в трех пространственных измерениях относительно пути.
16. Способ отслеживания и управления транспортным средством аттракциона для катания парка развлечений, содержащий этапы, на которых:
заполняют путь транспортного средства аттракциона для катания аттракциона парка развлечений электромагнитным излучением с использованием излучающей подсистемы, содержащей один или более излучателей;
регистрируют длины волны электромагнитного излучения, обратно-отраженного от пути транспортного средства аттракциона для катания с одновременной фильтрацией длин волны электромагнитного излучения, не являющегося обратно-отраженным из зоны аттракциона для посетителей с использованием подсистемы регистрации, имеющей один или более оптических фильтров; и
отслеживают, в пространстве и времени, перемещение и положение транспортного средства аттракциона для катания на пути транспортного средства аттракциона для катания на основании изменений в обратно-отраженном электромагнитном излучении с помощью системы управления, соединенной с возможностью связи с подсистемой регистрации.
17. Способ по п. 16, содержащий также этап, на котором управляют по меньшей мере одним рабочим параметром транспортного средства аттракциона для катания на основании отслеживаемого перемещения и положения транспортного средства аттракциона для катания на пути транспортного средства аттракциона для катания с использованием системы управления, причем отслеживание, в пространстве и времени, перемещения и положения транспортного средства аттракциона для катания на пути транспортного средства аттракциона для катания содержит этапы, на которых:
отслеживают рисунки обратно-отраженного электромагнитного излучения, создаваемые из обратного отражения обратно-отражающими метками, расположенными на пути транспортного средства аттракциона для катания;
идентифицируют изменения в рисунках обратно-отраженного электромагнитного излучения, в котором первый рисунок обратно-отраженного электромагнитного излучения переходит во второй рисунок обратно-отраженного электромагнитного излучения, в котором участки первого рисунка обратно-отраженного электромагнитного излучения больше не присутствуют; и
коррелируют участки первого рисунка обратно-отраженного электромагнитного излучения, больше не присутствующие во втором рисунке, с преграждением обратно-отражающих меток, расположенных на пути транспортного средства аттракциона для катания, транспортным средством аттракциона для катания; и
при этом управление по меньшей мере одним рабочим параметром транспортного средства аттракциона для катания на основании отслеживаемого перемещения и положения транспортного средства аттракциона для катания на пути транспортного средства аттракциона для катания с использованием системы управления содержит управление по меньшей мере одним рабочим параметром для поддержания заранее определенной степени преграждения обратно-отражающих меток на пути транспортным средством аттракциона для катания.
18. Способ по п. 16, содержащий также этапы, на которых:
обратно отражают электромагнитное излучение с использованием по меньшей мере трех обратно-отражающих меток, расположенных на разных сторонах транспортного средства аттракциона для катания;
регистрируют, с разных точек обзора, обратно-отраженное электромагнитное излучение от по меньшей мере трех обратно-отражающих меток с одновременной фильтрацией электромагнитного излучения, которое не является обратно-отраженным, с использованием по меньшей мере двух детекторных камер подсистемы регистрации; и
отслеживают транспортное средство аттракциона для катания в пространстве и времени в трех пространственных измерениях на основании обратно-отраженного электромагнитного излучения от по меньшей мере трех обратно-отражающих меток с использованием системы управления.
19. Способ по п. 16, содержащий также этап, на котором запускают устройство эффекта, когда отслеживаемое положение и перемещение транспортного средства аттракциона для катания указывают, что транспортное средство аттракциона для катания находится в пределах заранее определенного расстояния устройства эффекта.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| RU 2009129635 A, 10.02.2011. | |||

