1. ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к тормозным системам локомотива, а более конкретно - к приводимому стояночному тормозу, встроенному в тормозную систему локомотива.
2. УРОВЕНЬ ТЕХНИКИ
[0002] В целом, локомотивы содержат как пневматическую тормозную систему, используемую тогда, когда локомотив приведен в действие и находится в рабочем состоянии, так и стояночный тормоз, используемый при стоянке локомотива. Применение стояночного тормоза предотвращает скатывание локомотива при утечке давления воздуха в тормозном цилиндре, как в случае, если локомотив стоит на протяжении длительного периода времени. Ввиду того, что масса современных локомотивов может превышать 400000 фунтов (около 181437 кг), стояночный тормоз, управляемый вручную, должен вырабатывать тормозную силу, достаточную для удержания локомотива на месте. В результате, применение стояночного тормоза вручную зачастую требует существенного усилия, а достижение достаточной тормозной силы зависит от уровня физической силы и опыта оператора. Кроме того, ручной тормоз локомотива находится снаружи кабины локомотива и к нему может быть получен доступ через мостик, который проходит вдоль локомотива. Таким образом, управление ручным тормозом может порождать риск возникновения угрозы безопасности, в частности, при неблагоприятных погодных условиях.
[0003] Для решения данных проблем были разработаны приводимые ручные тормоза. Например, в патенте США №6,427,811 раскрыт ручной тормоз, для работы которого необходим высокомощный электродвигатель в комбинации со сложным и дорогостоящим зубчатым механизмом для выработки необходимой выходной силы. Системы, подобные данной, также требуют сложных способов обратной связи для обнаружения выходной нагрузки и прекращения работы двигателя, когда необходимая сила была достигнута. В результате сбоя способа обратной связи могут перегореть предохранители, компоненты могут быть физически повреждены или тормозная сила может быть недостаточной. Следовательно, существует необходимость в приводимом ручном тормозе, выполненном с возможностью управления из кабины локомотива и не требующем сложного или склонного к сбою исполнения.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0004] Настоящее изобретение содержит приводимый ручной тормоз для тормозов локомотива, который содержит тормозную цепь, соединенную с тормозами локомотива для перемещения между первым положением, в котором тормоза локомотива находятся в отпущенном положении, и вторым положением, в котором тормоза локомотива находятся в прижатом положении. С тормозной цепью соединен стопор, так что она может перемещаться между застопоренным положением, в котором перемещение тормозной цепи предотвращено, и отпущенным положением, в котором тормозная цепь может перемещаться, в том числе в течение продолжительного времени. Управляемая компьютером тормозная система может быть соединена с тормозным цилиндром и стопором, и может быть запрограммирована на установку стопора в застопоренное положение, когда тормозной цилиндр переместил тормоз локомотива в прижатое положение. С тормозной цепью может быть соединен привод для обеспечения натяжения в тормозной цепи по мере перемещения тормозной цепи между первым и вторым положениями. Привод может содержать двигатель или цилиндр натяжения, соединенный с управляемой компьютером тормозной системой и приводимый ею для обеспечения натяжения в тормозной цепи после того, как тормоза были прижаты. В качестве альтернативы, привод может содержать передаточный механизм, соединяющий тормозную цепь с тормозом локомотива, так что натяжение в тормозной цепи обеспечивается по мере перемещения тормозов из отпущенного положения в прижатое положение. Может быть расположен датчик для определения нагрузки на тормозную цепь и выдачи сигнала, соответствующего нагрузке на управляемую компьютером тормозную систему. Управляемая компьютером тормозная система может быть запрограммирована для предоставления отдельного интерфейса, управляющего тормозным цилиндром и стопором, в надежной системе управления поездом. Система управления локомотивом может находиться в связи с управляемой компьютером тормозной системой, и может быть запрограммирована на блокирование работы локомотива, если тормозная цепь застопорена.
[0005] Приводимый стояночный тормоз используют путем создания давления в тормозных цилиндрах локомотива для перемещения тормозов локомотива из отпущенного положения в прижатое или установленное положение. Как только тормоза устанавливают или они были установлены тормозной системой, приводимый стояночный тормоз приводится в действие для обеспечения натяжения в тормозной цепи. Как только тормоза были полностью установлены имеющейся тормозной системой, и в приводимом стояночном тормозе было обеспечено необходимое натяжение, тормозная цепь стопорится на месте с использованием привода для удержания тормозов локомотива в прижатом положении.
КРАТКОЕ ОПИСАНИЕ НЕСКОЛЬКИХ ВИДОВ НА ЧЕРТЕЖЕ(АХ)
[0006] Настоящее изобретение будет полностью понято и осмыслено после прочтения следующего подробного описания вместе с сопроводительными чертежами, на которых:
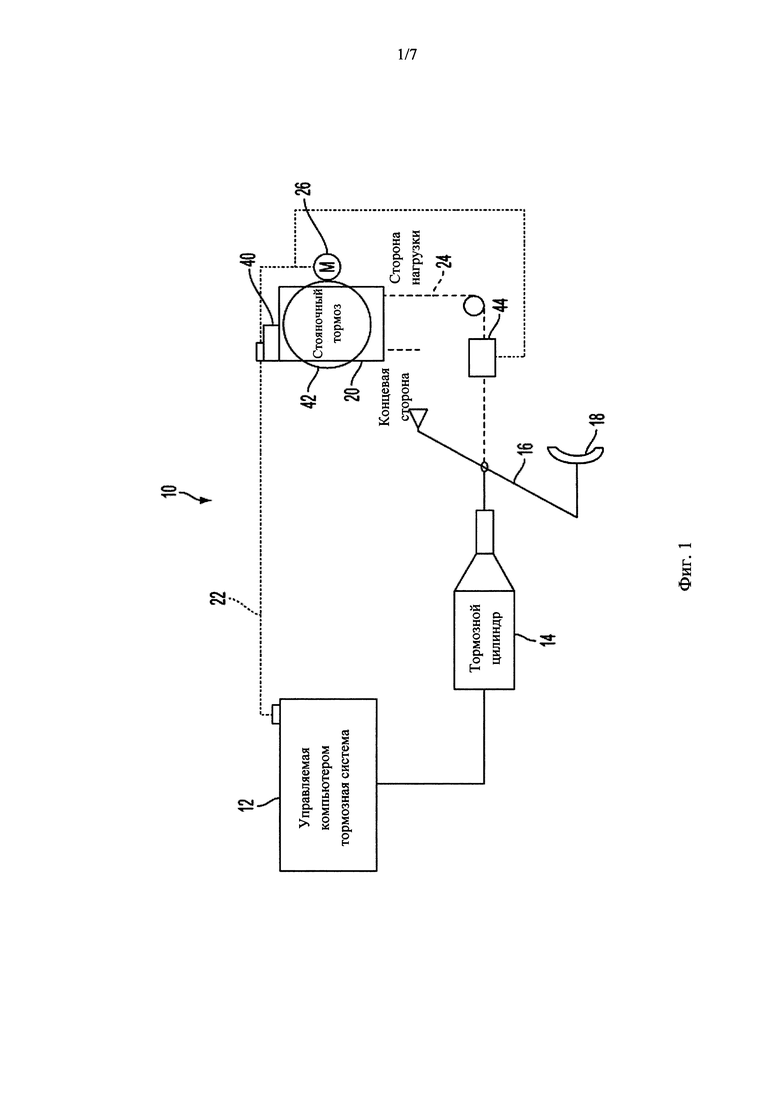
[0007] Фиг. 1 представляет собой схематический вид первого примера приводимой системы стояночного тормоза, в соответствии с настоящим изобретением;
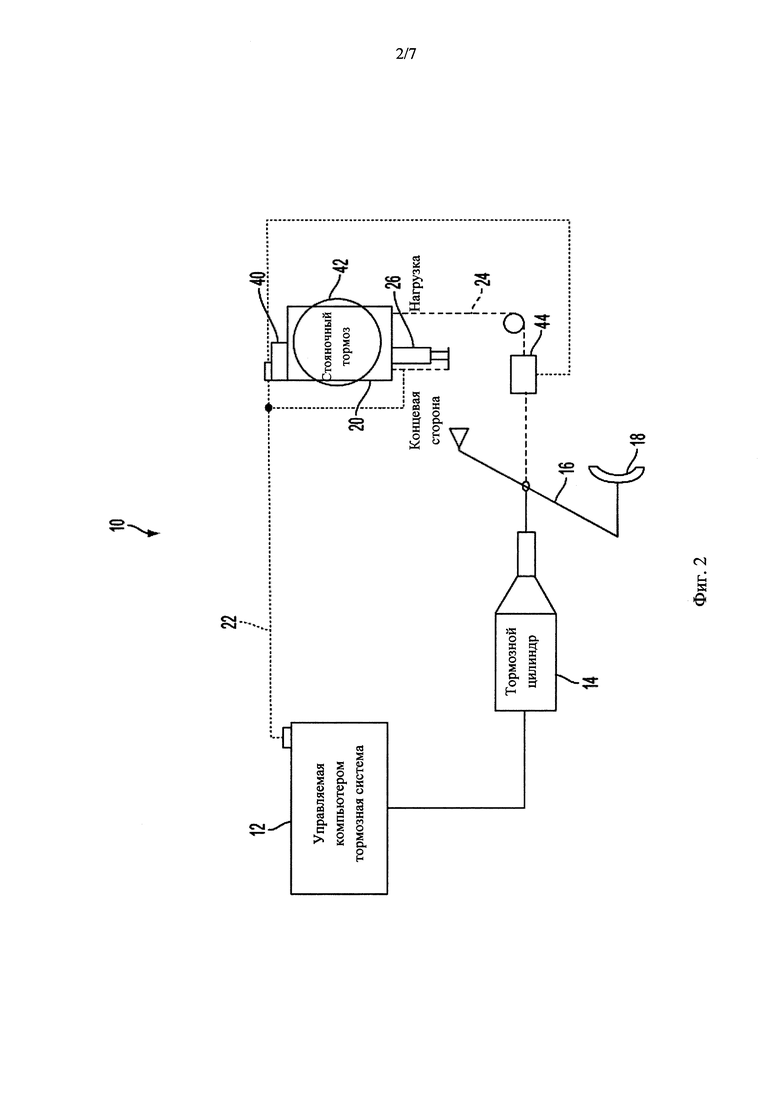
[0008] Фиг. 2 представляет собой схематический вид второго примера приводимой системы стояночного тормоза, в соответствии с настоящим изобретением;
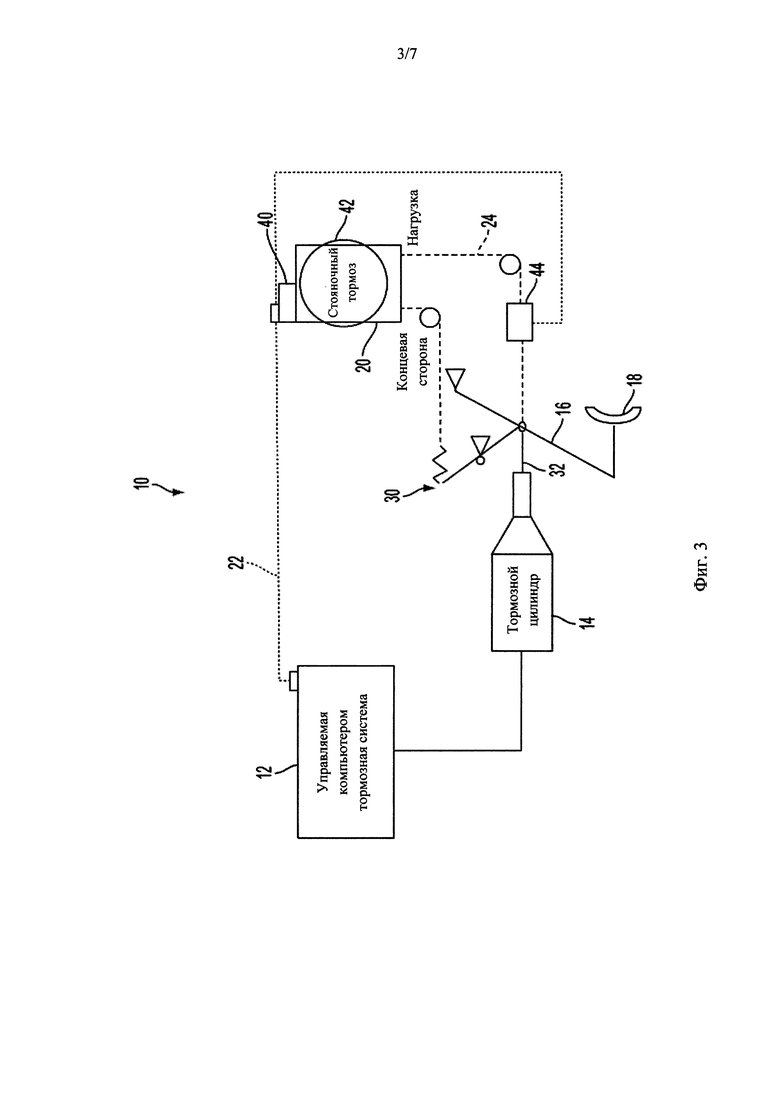
[0009] Фиг. 3 представляет собой схематический вид третьего примера приводимой системы стояночного тормоза, в соответствии с настоящим изобретением;
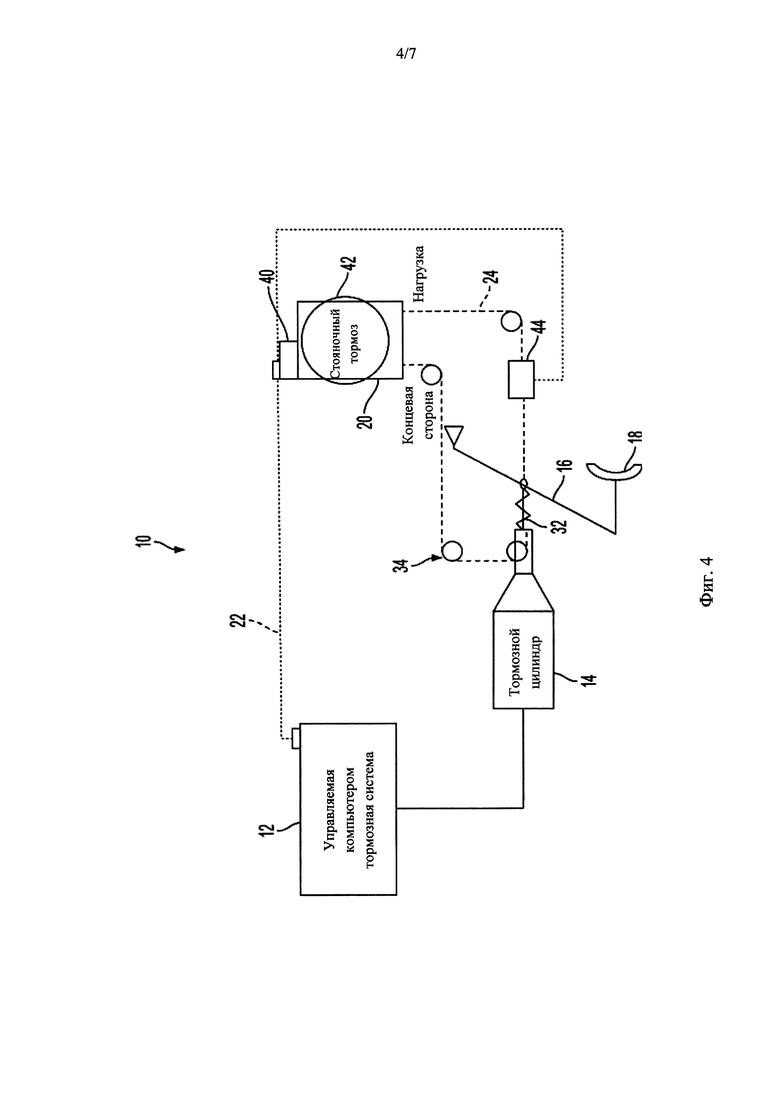
[0010] Фиг. 4 представляет собой схематический вид четвертого примера приводимой системы стояночного тормоза, в соответствии с настоящим изобретением;
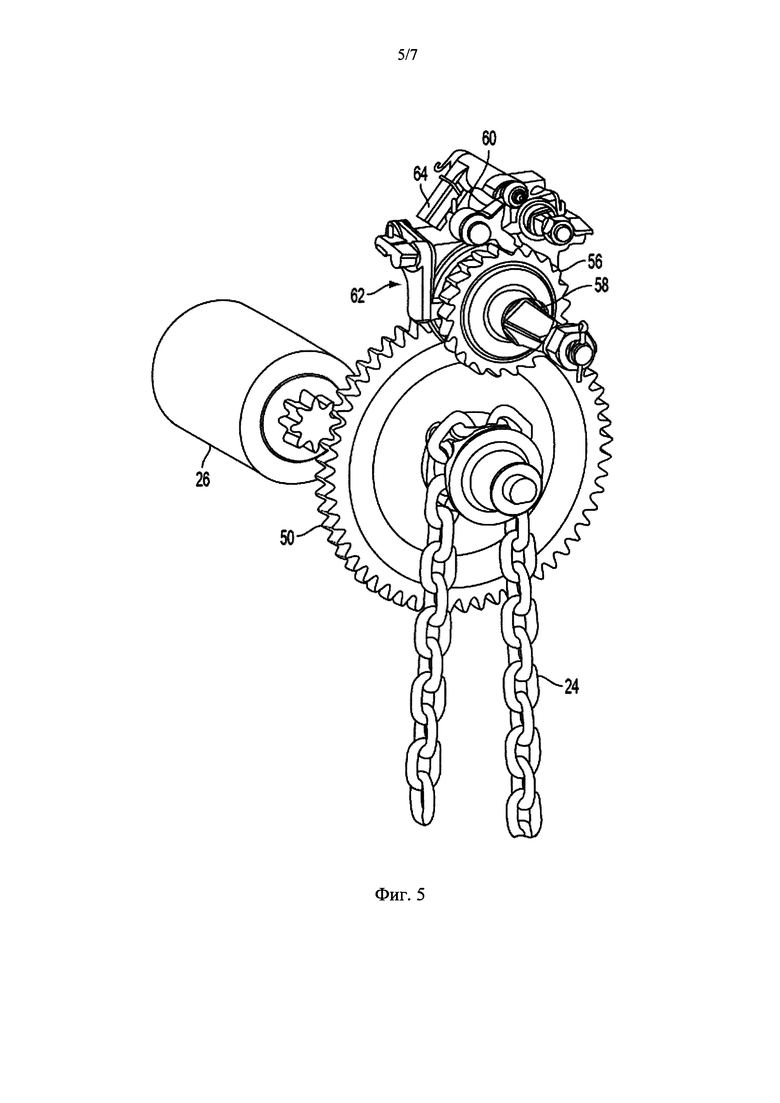
[0011] Фиг. 5 представляет собой изометрический вид приводимой системы стояночного тормоза, в соответствии с настоящим изобретением;
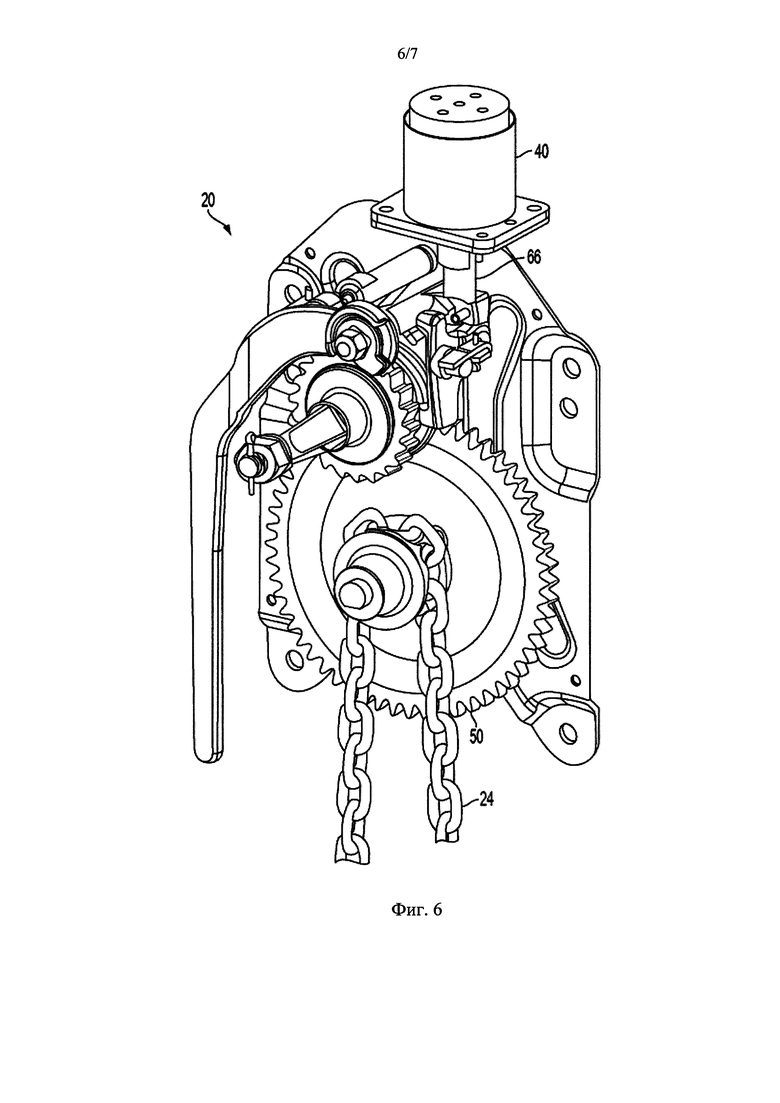
[0012] Фиг. 6 представляет собой другой изометрический вид приводимой системы стояночного тормоза, в соответствии с настоящим изобретением;
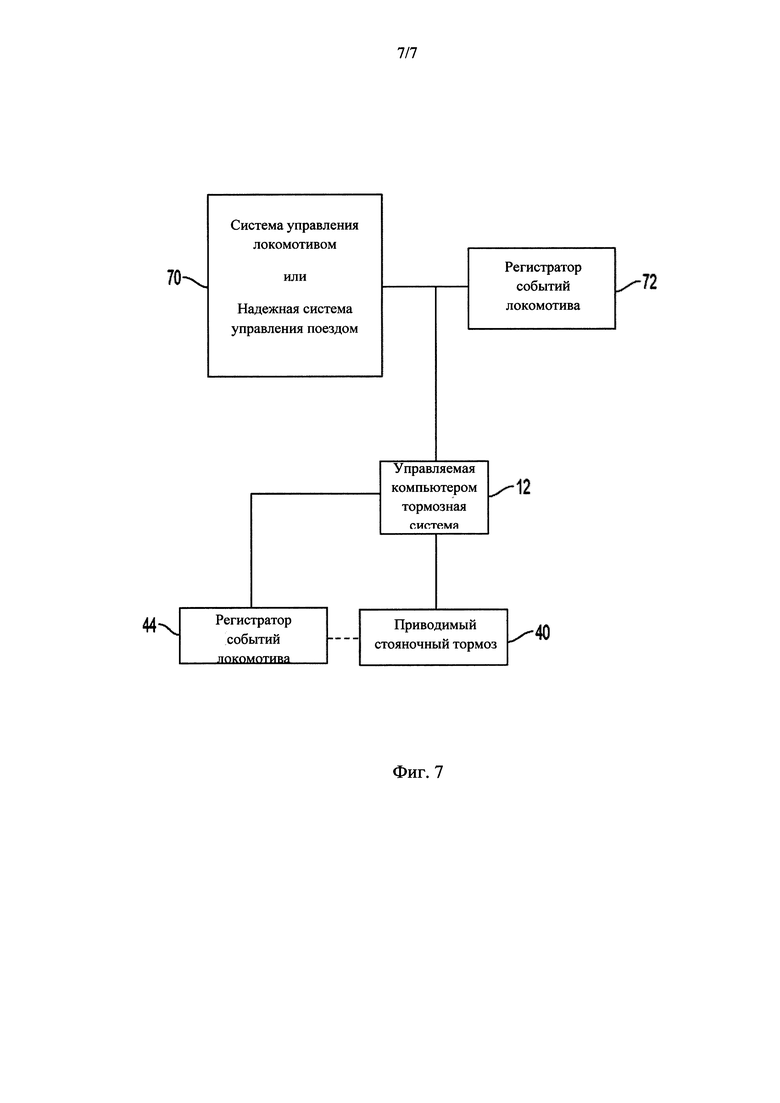
[0013] Фиг. 7 представляет собой вид в перспективе системы управления для приводимого стояночного тормоза, в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0014] Настоящим ссылаясь на чертежи, на которых подобными ссылочными позициями обозначены подобные части по всему тексту, на Фиг. 1 изображена приводимая система 10 стояночного тормоза для локомотива. Система 10 стояночного тормоза содержит управляемую компьютером тормозную систему 12, которая обычно используется для приведения в действие пневматического тормозного цилиндра 14 тормозной системы 16 локомотива для прижатия тормозов 18 локомотива путем дополнительного выполнения управляемой компьютером тормозной системы 12 так, как описано в настоящем документе. Специалист в данной области техники поймет, что управляемая компьютером тормозная система 12 содержит микрокомпьютер, программируемый для управления электропневматическим интерфейсом между двигателем локомотива и пневматическими частями тормозной системы 16 локомотива. Управляемая компьютером тормозная система 12 также соединена со стояночным тормозом 20 через линию 22 управления. Стояночный тормоз 20 механически соединен с тормозами 18 локомотива, как, например, с помощью цепи 24, которая натягивается посредством стояночного тормоза 20 для удержания тормозов 18 в прижатом положении, обеспечивая тем самым функционал стояночного тормоза. Таким образом, стояночный тормоз 20 не используется для установки тормозов, а вместо этого используется для поддержания тормозов в прижатой системе в случае, если пневматическая тормозная система уменьшает давление в тормозном цилиндре 14.
[0015] Стояночный тормоз 20 приводится в действие приводом 26 натяжения, который может представлять собой электронный, пневматический или гидравлический двигатель, находящийся в связи с линией 22 управления и реагирующий на команды, отправляемые по линии 22 управления для приведения в действие стояночного тормоза 20 и, следовательно, натяжения тормозной цепи 24. Например, привод 26 может представлять собой двигатель, соединенный с шестеренкой привода стояночного тормоза 20 для вращения шестеренки привода и натяжения тормозной цепи 24. Например, может быть использован 74-вольтовый стартерный двигатель переменного тока из крупногабаритного дизельного двигателя, используемого для запуска дизельного локомотива. Двигатель, подобный данному, обеспечивает высокий крутящий момент при малом размере, им легко управлять, он свободно вращается в любом направлении при выключенном питании, и он может быть запитан от аккумулятора локомотива. По мере того, как тормозной цилиндр 14 в текущий момент устанавливает или прижимает тормоза, привод 26 натяжения должен предоставить только достаточное количество силы для прекращения натяжения в цепи 24, так что тормоза не будут отпущены. Однако следует понимать, что существуют многочисленные способы растягивания цепи 24 через стояночный тормоз 20 для обеспечения умеренного натяжения, требуемого для поддержания тормозов в прижатом положении. Например, с концом цепи 24 может быть соединен отдельный двигатель и барабан лебедки, или же с концом цепи может быть соединен пневматический или гидравлический цилиндр. В любом случае, между двигателем и шестеренкой стояночного тормоза может быть предусмотрена предохранительная муфта для ограничения максимального натяжения цепи и ограничения максимального крутящего момента двигателя. В качестве альтернативы, поскольку ток двигателя (или давление воздуха, если используется пневматический двигатель) пропорционален крутящему моменту двигателя, система 10 может отслеживать ток, забираемый двигателем, и выключать двигатель после достижения желаемого крутящего момента.
[0016] В качестве альтернативы, как изображено на фиг. 2, привод 26 может содержать цилиндр натяжения, который может продольно выдвигаться для натяжения цепи 24 и прижатия тормозов 18. Управления компьютером тормозная система 12 может связываться с приводом 26 путем предоставления приводу 26 связи по сети и узла управления. Например, вариант реализации цилиндра натяжения в приводе 26 может быть приведен в действие пневматическим или гидравлическим способом в ответ на команды, отправленные управляемой компьютером тормозной системой 12 по линии 22 управления. В данном варианте реализации, управляемая компьютером тормозная система 12 может быть запрограммирована на прижатие пневматических тормозов локомотива, создание давления в цилиндре 26 натяжения (только во время установки стояночного тормоза) для вытягивания цепи 24 через стояночный тормоз 20, натягивая тем самым цепь, и последующей установки стопора 40 для удержания стояночного тормоза в прижатом положении. Как только стояночный тормоз был установлен, пневматические тормоза локомотива и давление в цилиндре 26 натяжения могут быть отпущены посредством управляемой компьютером тормозной системы 12, поскольку стопор 40 будет удерживать установленный стояночный тормоз. Для отпускания стояночного тормоза, управляемая компьютером тормозная система 12 может быть запрограммирована на повторное создание давления в пневматических тормозах локомотива, снижая тем самым натяжение на цепь стояночного тормоза, сбрасывание давления из цилиндра 26 натяжения, отпускание стопора 40 и последующее отпускание пневматических тормозов локомотива. При полном отпускании цилиндра 26 натяжения и стопора 40, пружина возврата, содержащаяся в тормозном цилиндре локомотива, может вытянуть цепь 24 через стояночный тормоз 20 в отпущенное состояние. В качестве альтернативы, цилиндр 26 натяжения может быть приведен в действие пружиной со смещением, которое меньше, чем необходимое для прижатия тормозов 18 (так что тормоза 18 не прижимаются пружиной привода 26), но достаточное для обеспечения и удержания какого-либо натяжения в цепи 24 по мере прижатия тормозов 18, удерживая тем самым тормоза 18 в прижатом положении.
[0017] Как изображено на фиг. 3, привод может содержать механическую обводную тягу 30, соединяющую цепь 24 со штоком 32 тормозного цилиндра 14, так что цепь перемещается через стояночный тормоз 20 по мере прижатия тормозов 18 тормозным цилиндром 14. Подобным образом, как изображено на фиг. 4, привод 26 может содержать ряд обводящих роликов 34, которые соединяют цепь 24 непосредственно со штоком 32 тормозного цилиндра 14, так что цепь 24 перемещается через стояночный тормоз 20 с прижатием тормозов 18. В этих вариантах реализации отсутствует необходимость в том, чтобы управляемая компьютером тормозная система 12 отправляла сигнал о натяжении тормозной цепи 24 по мере прохождения цепи 24 через стояночный тормоз 20 по мере прижатия тормозов 18.
[0018] Стояночный тормоз 20 содержит стопорное устройство 40 стояночного тормоза, соединенное с управляемой компьютером тормозной системой 12, как, например, через линию 22 управления, для выборочного зацепления или расцепления с/от барабана лебедки в стояночном тормозе 20. Стопорение вращения стояночного тормоза 20 предотвращает прохождение цепи 24 через стояночный тормоз 20 (режим установки стояночного тормоза), а расстопорение обеспечивает возможность прохождения цепи 24 через стояночный тормоз 20 (режим выключенного стояночного тормоза). В вариантах реализации, изображенных на фиг. 1-4, стопорение тормозной цепи 24 посредством стопорного устройства 40, когда тормоза находятся в прижатом положении, будет удерживать тормоза 18 в прижатом положении, поскольку стопорение тормозной цепи 24 будет предотвращать возврат тормозов 18 в отпущенное положение, даже если давление в тормозном цилиндре 14 было сброшено. Стопорное устройство 40 может содержать соленоид, пневматический или гидравлический цилиндр, или другой привод, который может выборочно сцепляться или расцепляться для удержания или отпускания тормозной цепи 24.
[0019] Ссылаясь на фиг. 5, привод 26 натяжения может быть соединен с приводной шестеренкой 50 стояночного тормоза 20 для вращения приводной шестеренки и натяжения тормозной цепи 24. Приводная шестеренка 50 соединена с барабаном 52, который при вращении будет натягивать или ослаблять цепь 24. Стояночный тормоз 20 также содержит ручную приводную шестерню/храповой механизм 56, соединенную/соединенный со штангой 58 штурвала управления, так что пользователь может приводить в действие барабан 52 вручную путем проворачивания штурвала 42 управления, который установлен на штанге 58. Собачка 60, соединенная с приводной шестеренкой/храповым механизмом 56 предотвращает вращение приводной шестеренки/храпового механизма 56 в обратном направлении и, следовательно, поддерживает стояночный тормоз 20 в прижатом положении после его прижатия. Стояночный тормоз 20 дополнительно содержит зажимной механизм 62, который обеспечивает возможность отсоединения приводной шестеренки/храпового механизма 56 и штурвала 42 управления от барабана 52, отпуская тем самым барабан 52, прекращая вращение и отпуская цепь 24. Механизм 64 продолжительного отпускания может быть использован для удержания зажимного механизма 62 в отжатом положении, так что барабан 52 может свободно двигаться и стояночный тормоз 20 не может быть случайно прижат, если тормозная цепь 24 не была полностью отмотана или если движение железнодорожного вагона приводит к потере натяжения в тормозной цепи 24. Ссылаясь на фиг. 6, стопорное устройство 40 может обеспечивать стопорение и расстопорение тормозной цепи 24 путем сцепления или расцепления штанги 66 с/от зажимного механизма 62, таким образом управляя тем, может ли собачка 60 и приводная шестеренка 56 предотвращать вращение барабана 52, так что цепь 54 отматывается.
[0020] Для установки стояночного тормоза, оператор локомотива может нажать специальную кнопку или выбрать соответствующую функцию на дисплее в кабине локомотива, снабженной управляемой компьютером тормозной системой 12. В ответ на такую команду, управляемая компьютером тормозная система 12 выполняет прижатие пневматического тормоза в тормозах 18 локомотива под давлением, вычисленном для обеспечения эквивалентной удерживающей силы надлежащим образом установленного стояночного тормоза для локомотива такой массы (плюс заранее определенный допуск для компенсации ослабления давления в конце цикла стояночного тормоза). Как только тормоза 18 установлены до соответствующего давления, управляемая компьютером тормозная система 12 приводит в действие привод 26 для удаленного прижатия стояночного тормоза 20 и тормозной цепи 24 натяжения и последующей установки стопорного устройства 40. После установки стояночного тормоза 20, управляемая компьютером тормозная система 12, при необходимости, может сбрасывать давление в тормозном цилиндре 14. Стояночный тормоз 20 будет полностью поддерживать силу стояночного тормоза, обеспечиваемую тормозным цилиндром 14 за вычетом небольшой величины ввиду ослабления, поскольку цепь 24 стояночного тормоза и шкив полностью нагружены. В результате, управляемая компьютером тормозная система 12 обеспечивает высокие силы, требуемые для прижатия стояночного тормоза 20, посредством пневматического тормозного цилиндра 14, который является неотъемлемой частью тормозной системы локомотива, тем самым избегая необходимости в сложных и дорогостоящих приводных механизмах для приложения необходимой силы. Стояночный тормоз 20 слегка натянут с использованием маломощного привода 26 стояночного тормоза 20, который должен лишь обеспечивать силу, достаточную для умеренного натяжения цепи 24 стояночного тормоза, и в конце установлен посредством стопорного устройства 40.
[0021] Для отпускания стояночного тормоза 20, оператор локомотива может нажать на специальную кнопку, которая выбирает функцию отпускания на дисплее, связанном с управляемой компьютером тормозной системой 12. Управляемая компьютером тормозная система 12 запрограммирована на реагирование путем прижатия пневматического тормоза с использованием тормозного цилиндра 14 приблизительно под тем же давлением, которое было ранее использовано для установки стояночного тормоза 20. После этого, управляемая компьютером тормозная система 12 обуславливает отпускание стояночного тормоза 20 путем расстопорения стопорного устройства 40, что обеспечивает возможность натяжения цепи 24 стояночного тормоза. Путем регулировки сбрасываемого давления в тормозном цилиндре 14 до заранее определенного значения, меньшего, чем давление, используемое для прижатия стояночного тормоза, система 10 может обеспечивать достаточную энергию деформации в цепи 24 стояночного тормоза и тормозное приспособление, так что после отпускания цепь 24 свободно перемещается в полностью натянутое состояние. Тем не менее, прижатие пневматического тормоза снижает натяжение цепи 24 стояночного тормоза, снижая тем самым мощность, требуемую для приведения в действие стопорного устройства 40. Когда стояночный тормоз 20 находится в отпущенном состоянии, управляемая компьютером тормозная система 12 сбрасывает давление в тормозном цилиндре 14, завершая тем самым цикл отпускания стояночного тормоза. Когда стояночный тормоз 20 находится в состоянии расстопорения, цепь 24 стояночного тормоза может быть вытянута через стояночный тормоз 20 в любом направлении. За счет использования мощности приспособления пневматического тормоза, как для установки/прижатия, так и для отпускания тормозов локомотива путем пневматического управления тормозным цилиндром 14, система 10 стояночного тормоза требует более малых, более простых и менее дорогостоящих компонентов. Несмотря на то, что ей может быть необходимо стопорное устройство 40 мощности выше оптимальной, система 10 может быть выполнена с возможностью отпускания стояночного тормоза без начального повторного создания давления в тормозном цилиндре 14.
[0022] Текущее состояние стояночного тормоза 20 может быть определено с помощью механизма с открытым циклом или с замкнутым циклом. В подходе с открытым циклом, давление прижатия и предварительное натяжение стояночного тормоза будут сконфигурированы заранее для обеспечения требуемой силы стояночного тормоза. После этого, текущее состояние установки и отпускания может быть сохранено в управляемой компьютером тормозной системе 12 на основании последней команды. В качестве альтернативы, стояночный тормоз 20 может содержать датчик 44, который определяет то, были ли тормоза нагружены до верхнего порогового значения, и, таким образом, в прижатом состоянии, или при низком/нулевом значении, и, таким образом, отпущены. Датчик 44 может содержать датчик нагрузки на стороне нагрузки цепи 24 стояночного тормоза, который выдает электрический сигнал, пропорциональный натяжению на стороне нагрузки цепи 24. Датчик 44 может быть соединен с управляемой компьютером тормозной системой 12, как, например, по линии 22, так что пропорциональный электрический сигнал может быть принят управляемой компьютером тормозной системой 12. В качестве альтернативы, датчик 44 может представлять собой переключатель нагрузки, который, например, открыт в одном состоянии нагрузки и закрыт в другом состоянии нагрузки. Датчик 44 также может быть использован для измерения силы стояночного тормоза, так что логическая схема в управляемой компьютером тормозной системе 12 может сравнивать данное измеренное значение с пороговым значением, относящимся к прижатому стояночному тормозу. Пороговое значение может быть динамически определено из конкретного рабочего состояния стояночного тормоза 20. Положение/состояние стопорного устройства 40 также может быть считано управляемой компьютером тормозной системой 12 и связано с состоянием команды. Используя любой из данных подходов, управляемая компьютером тормозная система 12 может предоставлять водителю поезда указание на то, что стояночный тормоз 20 был установлен или отпущен, в соответствии с командой, и может предоставлять предупреждение, представляющее собой системную ошибку, если заданное командой состояние не достигнуто стояночным тормозом 20.
[0023] Ссылаясь на фиг. 7, приводимый стояночный тормоз 20, посредством управляемой компьютером тормозной системы 12, может быть соединен с компьютером 70 управления локомотивом (или надежной системой управления поездом) и/или регистратором 72 событий локомотива. В результате, информация о текущем состоянии, предоставляемая стояночным тормозом 20, такая как информация, предоставляемая датчиком 44, может быть использована для запуска уведомления для оператора или даже автоматической блокировки, предотвращая вождение локомотива оператором при прижатом стояночном тормозе 20. Кроме того, управляемая компьютером тормозная система 12 может передавать информацию о стояночном тормозе 20 в регистратор 72 событий, так что состояние стояночного тормоза 20 может отслеживаться с течением времени. Внедрение приводимого стояночного тормоза 20 в управляемую компьютером тормозную систему 12 также обеспечивает единый интерфейс, в котором оператор может управлять как пневматическими, так и стояночными тормозами. Например, использование датчика 44 в системе 10 обеспечит обратную связь относительно того, находится ли стояночный тормоз 20 в состоянии принятой команды, и относительно любого изменения стояночного тормоза 40, если прижатие или отпускание было выполнено вручную. Система 70 управления локомотивом на ведущем локомотиве также выполнена с возможностью связи с операциями на ведомых локомотивах и задания им команд в совокупности. Таким образом, команда от управляемой компьютером тормозной системы 12 на прижатие стояночного тормоза 20 может быть передана на другие локомотивы от системы 70 управления ведущим локомотивом на систему 70 управления ведомым локомотивом, тем самым позволяя одному оператору прижать приводимые стояночные тормоза 20 на всех локомотивах в совокупности. Например, внутренние связи между системой 70 управления ведущим локомотивом и любыми системами 70 управления ведомым локомотивом могут быть осуществлены по проводной сетевой шине, такой как «Echelon PL22», используемая на ЕСР, по Ethernet, или даже по беспроводной сети связи с использованием любого количества коммерчески доступных технологий. Подобным образом, в поезде с распределенной энергией, например, поезде с системой распределенной энергии «LOCOTROL» (r), доступной от компании «GE Transportation» из Чикаго, штат Иллинойс, команда от управляемой компьютером тормозной системы 12 на прижатие стояночного тормоза 20 может быть передана на другие локомотивы в совокупности локомотивов с удаленным распределением энергии от системы 70 управления ведущим локомотивом на удаленную систему 70 управления локомотивом, тем самым позволяя одному оператору прижать приводимые стояночные тормоза 20 на всех локомотивах в совокупности.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМОБИЛЬ | 1998 |
|
RU2202480C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВОЧНЫМ ТОРМОЗОМ И ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2730735C1 |
| АВТОМАТИЧЕСКИЙ СТОЯНОЧНЫЙ ТОРМОЗ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 1996 |
|
RU2129502C1 |
| УСТРОЙСТВО СТОЯНОЧНОГО ТОРМОЗА ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ ЖЕЛЕЗНОДОРОЖНОГО ПОДВИЖНОГО СОСТАВА | 2008 |
|
RU2468942C2 |
| ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ ПАРКОВОЧНЫМ ТОРМОЗОМ | 2014 |
|
RU2643853C1 |
| СИСТЕМА ОТПУСКАНИЯ ТОРМОЗОВ ПОЕЗДА И ПОЕЗД | 2018 |
|
RU2695469C1 |
| Интеллектуальная система управления тормозами локомотива | 2016 |
|
RU2729496C1 |
| СТОЯНОЧНОЕ ТОРМОЗНОЕ УСТРОЙСТВО РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА С ВЫСОКИМ КОЭФФИЦИЕНТОМ ПОЛЕЗНОГО ДЕЙСТВИЯ | 2010 |
|
RU2526307C2 |
| ЭЛЕКТРОВОЗДУХОРАСПРЕДЕЛИТЕЛЬ ТОРМОЗА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2459731C1 |
| ТОРМОЗ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2534105C2 |
Изобретение относится к области железнодорожного транспорта. Приводимый стояночный тормоз для тормозов локомотива стопорит тормозную цепь в зафиксированном положении после того, как тормозной цилиндр прижал тормоза локомотива. Управляемая компьютером тормозная система соединена с тормозным цилиндром и стопором, а также запрограммирована на установку стопора в застопоренном положении, когда тормозной цилиндр переместил тормоз локомотива в прижатое положение. Привод соединен с тормозной цепью для создания натяжения в тормозной цепи по мере перемещения тормозной цепи между первым и вторым положениями. Привод содержит двигатель или цилиндр натяжения, создающий натяжение в тормозной цепи после прижатия тормозов. Достигается упрощение конструкции и повышение надежности тормоза. 2 н. и 12 з.п. ф-лы, 7 ил.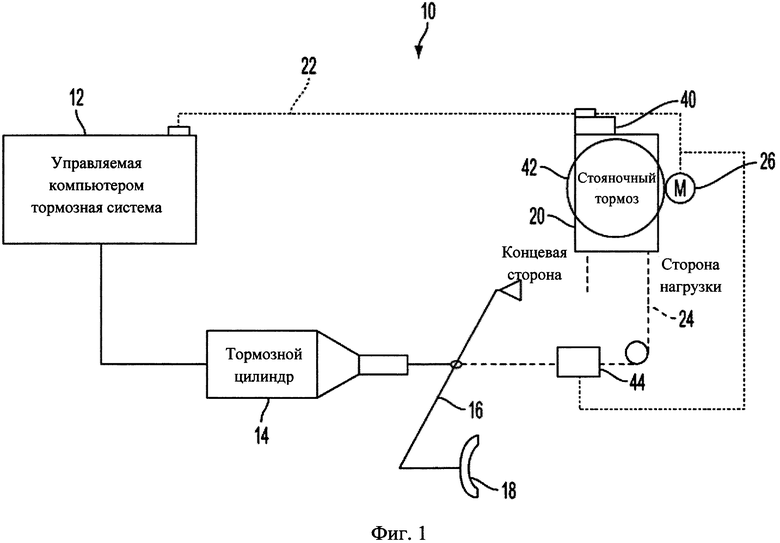
1. Приводимая система стояночного тормоза для тормозов локомотива, содержащая:
по меньшей один тормозной цилиндр, в котором может быть создано давление для перемещения тормоза локомотива из отпущенного положения в прижатое положение;
тормозную цепь, соединенную с тормозом локомотива для перемещения между первым положением, в котором тормоз локомотива находится в отпущенном положении, и вторым положением, в котором тормоз локомотива находится в прижатом положении;
стопор, соединенный с тормозной цепью, выполненный с возможностью перемещения между застопоренным положением, в котором стопор предотвращает перемещение тормозной цепи, и отпущенным положением, в котором стопор не предотвращает перемещение тормозной цепи;
привод, соединенный с тормозной цепью, для натяжения тормозной цепи по мере перемещения тормоза локомотива между отпущенным положением и прижатым положением посредством тормозного цилиндра; и
управляемую компьютером тормозную систему, соединенную с тормозным цилиндром и стопором, причем управляемая компьютером тормозная система запрограммирована на установку стопора в застопоренное положение после того, как тормоз локомотива был перемещен тормозным цилиндром в прижатое положение и после того, как привод натянул тормозную цепь.
2. Система по п. 1, в которой привод содержит двигатель, соединенный с управляемой компьютером тормозной системой и приводимый ею в действие.
3. Система по п. 1, в которой привод содержит цилиндр натяжения, соединенный с управляемой компьютером тормозной системой и приводимый ею в действие.
4. Система по п. 1, в которой привод содержит передаточный механизм, соединяющий тормозную цепь с тормозом локомотива, так что тормозная цепь перемещается из первого положения во второе положение по мере перемещения тормоза локомотива из отпущенного положения в прижатое положение.
5. Система по п. 1, в которой привод содержит пару обводящих роликов, соединяющих тормозную цепь непосредственно с тормозом локомотива, так что тормозная цепь перемещается из первого положения во второе положение по мере перемещения тормоза локомотива из отпущенного положения в прижатое положение.
6. Система по п. 1, которая дополнительно содержит датчик, расположенный для определения нагрузки на тормозную цепь и выдачи сигнала, соответствующего нагрузке, на управляемую компьютером тормозную систему.
7. Система по п. 1, в которой управляемая компьютером тормозная система дополнительно запрограммирована на предоставление отдельного интерфейса, управляющего тормозным цилиндром и стопором, в надежной системе управления поездом.
8. Система по п. 1, которая дополнительно содержит систему управления локомотивом, находящуюся в связи с управляемой компьютером тормозной системой.
9. Система по п. 8, в которой система управления локомотивом запрограммирована на блокирование работы локомотива, если тормозная цепь застопорена.
10. Система по п. 8, в которой система управления локомотивом запрограммирована на выдачу сигнала тревоги, если тормозная цепь застопорена, а система управления локомотивом приняла входные данные, задающие команду на движение локомотива.
11. Система по п. 1, которая дополнительно содержит регистратор событий локомотива, находящийся в связи с управляемой компьютером тормозной системой, при этом управляемая компьютером тормозная система запрограммирована на предоставление сообщения о перемещении стопора в застопоренное и отпущенное положения в регистратор событий локомотива.
12. Способ приведения в действие стояночного тормоза локомотива, включающий этапы, на которых:
создают давление в тормозном цилиндре для перемещения тормоза локомотива из отпущенного положения в прижатое положение;
создают какое-либо натяжение тормозной цепи, соединенной с тормозом локомотива, когда тормоз локомотива перемещен в прижатое положение за счет использования привода, соединенного с тормозной цепью, который создает натяжение тормозной цепи по мере перемещения тормоза локомотива между отпущенным положением и прижатым положением посредством тормозного цилиндра; и
стопорят тормозную цепь для предотвращения перемещения тормозной цепи после создания натяжения в тормозной цепи.
13. Способ по п. 12, который дополнительно включает этап, на котором определяют текущее состояние стопорения тормозной цепи.
14. Способ по п. 13, который дополнительно включает этап, на котором блокируют тяговое усилие, если тормозная цепь застопорена.
| US 5701974 A, 30.12.1997 | |||
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ РАБОТЫ АВТОМАТИЧЕСКОГО СТОЯНОЧНОГО ТОРМОЗА | 2012 |
|
RU2509015C1 |

