ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к тормозным системам локомотива и, более конкретно, к тормозной системе локомотива, которая может выборочно включать независимые и динамические тормоза в ответ на включение автоматического тормоза для учета текущих состояний поезда и геометрии рельсового пути.
2. ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
[0002] Как правило, локомотив имеет три отдельные, индивидуально управляемые тормозные системы. В первую очередь, локомотив имеет независимый тормоз, который представляет собой пневматический тормоз только локомотива, управляемый рукояткой независимого тормоза в кабине локомотива. Далее, локомотив имеет автоматический тормоз, который применяет тормоза на поезде и на локомотиве с помощью рукоятки автоматического тормоза. Наконец, динамический тормоз, который вырабатывает тормозное усилие от тяговых двигателей локомотива и управляется рукояткой динамического тормоза в кабине локомотива.
[0003] Длина поезда, состоящего из одного или более локомотивов и вплоть до 200 грузовых вагонов, может составлять более двух миль. Эта длина обуславливает ряд проблем, поскольку поезд может проезжать по сложной территории, включающей изгибы и возвышенности, что требует того, чтобы части поезда тормозили, а другие - нет. Таким образом, машинисту необходимо вручную выбирать наилучшие настройки тормозов или комбинацию настроек тормозов в отношении состояния поезда, геометрии рельсового пути, по которому в данный момент без остановок двигается поезд, с целью минимизации внутрипоездных сил для предотвращения схода вагонов с рельс или повреждения груза.
[0004] Данный процесс выбора тормозов усложняется рядом факторов. Например, применение автоматического тормоза приводит к последовательному применению тормозов железнодорожных вагонов от головы поезда к хвосту поезда и, таким образом, в то же время не воздействует полностью на весь поезд. Наличие промежутка между каждым железнодорожным вагоном может дополнительно усложнить применение тормоза. В дополнение, отпускание и перезарядка (автоматическая) тормоза поезда может занять большое количество времени в зависимости от количества включенных тормозов, так что быстрое циклическое включение и выключение автоматических тормозов не представляется возможным без уменьшения подачи воздуха в тормоз поезда. Если при езде по спуску тормоз поезда используется слишком сильно и поезд замедляется нежелательным образом, вместо отпускания тормоза, машинист поезда может увеличить тяговое усилие локомотива для движения поезда по спуску в противовес тормозам поезда. На практике это известно, как «динамометрическое торможение», и это представляет собой явное растрачивание топлива и тормозов.
[0005] Независимые и динамические тормоза на локомотиве обеспечивают машинисту поезда средства регулирования применения и отпускания тормозов локомотива для обеспечения некоторого общего регулирования тормозного усилия на поезде. Независимые и динамические тормоза могут быть применены и отпущены полностью независимо от автоматического тормоза, таким образом, представляется возможным и обычным использовать только независимый и/или динамический тормоз для управления скоростью поезда, где геометрия рельсового пути и ограничения скорости позволяют это делать с практической точки зрения. Когда используется независимый или динамический тормоз, локомотив (или железнодорожный состав) тормозит массу всего поезда, начиная с головы поезда. В результате, могут возникнуть высокие внутрипоездные силы, поскольку хвост поезда сокращает промежуток между каждым вагоном и перемещается к голове поезда. Железнодорожные линии также могут иметь правила и процедуры эксплуатации поезда, которые делают приоритетным использование динамического тормоза, так что износ тормозных колодок и колес локомотива сокращается, а на некоторых железнодорожных линиях используются блокировочные механизмы для предотвращения одновременного применения независимого и динамического тормоза.
[0006] Наконец, при экстренном торможении, которое представляет собой максимальное применение автоматического тормоза, автоматический экстренный тормоз локомотива также будет действовать на локомотив. Для предотвращения высоких внутрипоездных сил, возникающих в результате движения поезда во время экстренного торможения, машинист поезда, как правило, обучен «отдаивать» или отпускать тормоз локомотива, так что локомотив растягивает поезд во время применения экстренного тормоза. Действие растягивания применяется только во время первых секунд применения экстренного тормоза, тогда как применение экстренного автоматического тормоза распространяется по всему поезду и применяются все тормоза поезда. Как только тормоза поезда были применены, желательно применить тормоза локомотива для достижения минимально возможного тормозного пути.
[0007] Ясно, что в любой ситуации, в том числе экстренной, машинист поезда, возможно, не может знать и принимать во внимание мгновенные особенности динамики поезда, скорость распространения торможения, геометрию рельсового пути и другие факторы для определения оптимальных настроек, таких как «отдаивание» и повторное применения тормозов локомотива во время экстренной остановки. Следовательно, существует потребность в интеллектуальной системе управления тормозами, которая может восполнять недостатки от различных факторов, вовлеченных в применение автоматических, независимых или динамических тормозов, для содействия машинисту поезда в безопасном управлении поездом.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0008] Настоящее изобретение представляет собой интеллектуальную тормозную систему, которая может выдавать операционные команды торможения, которые отличаются от подаваемых машинистом поезда, для достижения заранее определенных критериев, при этом по-прежнему достигая общего результата торможения, задаваемого машинистом. Система содержит интерфейс для приема ввода от машиниста поезда с помощью рукоятки автоматического тормоза и рукоятки динамического тормоза, а также контроллер, соединенный с интерфейсом и имеющий первый модуль для выдачи команды на применение динамического тормоза, второй модуль для выдачи команды на применение независимого тормоза и третий модуль для выдачи команды на применение автоматического тормоза поезда. Контроллер запрограммирован на выдачу команды на применение независимого тормоза или применение динамического тормоза, или их комбинации, при этом уменьшая применение автоматического тормоза, инициированного машинистом поезда, для удовлетворения по меньшей мере одному заранее определенному критерию торможения. Применение независимого тормоза или применение динамического тормоза, или их комбинация, на которое выдает команду контроллер, должно достигать эффекта торможения, который равен тому, что произошло было, если система обеспечила бы применение автоматического тормоза в полную силу, которое было инициировано машинистом поезда. Заранее определенные критерии могут включать минимизацию величины износа расходных деталей тормозной системы, количество внутрипоездных сил, которые будут результатом торможения, и величину последующего динамометрического торможения, которое может быть необходимо, а также их комбинации. Контроллер запрограммирован на включение формулы динамики типового поезда, по которой можно вычислить текущую и будущую работу поезда по заданному маршруту. Контроллер использует формулу динамики поезда для выбора применения независимого тормоза или применения динамического тормоза, или их комбинации, которые достигнут эффекта торможения, который равен применению автоматического тормоза, инициированному машинистом поезда.
[0009] Контроллер может быть запрограммирован на автоматическое восполнение недостатков от отказа динамического тормоза путем выдачи команды на эквивалентное применение независимого тормоза или применение автоматического тормоза. Контроллер также может получать обратную связь о работе поезда после применения независимого тормоза или применения динамического тормоза, или их комбинации, а также выполнять регулировку формулы динамики поезда, если поезд не ведет себя так, как ожидалось. Контроллер может быть дополнительно запрограммирован на поддержание конкретной скорости поезда путем автоматической выдачи команды на применение динамического тормоза, применение независимого тормоза или применение автоматического тормоза, или их комбинации. Контроллер также может быть запрограммирован на восполнение недостатков состояния тормозной системы поезда при определении применения независимого тормоза или применения динамического тормоза, или их комбинации, которые достигнут эффекта торможения, который равен применению автоматического тормоза, инициированному машинистом поезда.
[0010] Настоящее изобретение включает способ управления тормозной системой поезда путем обеспечения интерфейса для приема ввода от машиниста поезда с помощью рукоятки автоматического тормоза и рукоятки динамического тормоза, контроллера, соединенного с интерфейсом и имеющего первый модуль для выдачи команды на применение динамического тормоза, второй модуль для выдачи команды на применение независимого тормоза и третий модуль для выдачи команды на применение автоматического тормоза поезда. Контроллер затем используется для выдачи команды на применение независимого тормоза или применение динамического тормоза, или их комбинации, при этом уменьшая применение автоматического тормоза, инициированного машинистом поезда, для достижения заранее определенных критериев. Применение независимого тормоза или применение динамического тормоза, или их комбинация, на которое выдает команду контроллер, должно достигать эффекта торможения, который равен применению автоматического тормоза, инициированному машинистом поезда. Способ может включать этап автоматического восполнения недостатков от отказа динамического тормоза путем выдачи команды на эквивалентное применение независимого тормоза или применение автоматического тормоза, или их комбинации. Способ также может включать этапы получения обратной связи о работе поезда после применения независимого тормоза или применения динамического тормоза, или их комбинации, а также выполнения регулировки формулы динамики поезда, если поезд не ведет себя так, как ожидалось.
КРАТКОЕ ОПИСАНИЕ НЕСКОЛЬКИХ ВИДОВ НА ЧЕРТЕЖЕ(АХ)
[0011] Настоящее изобретение станет более понятным и ясным после прочтения следующего подробного описания с прилагаемыми чертежами, на которых:
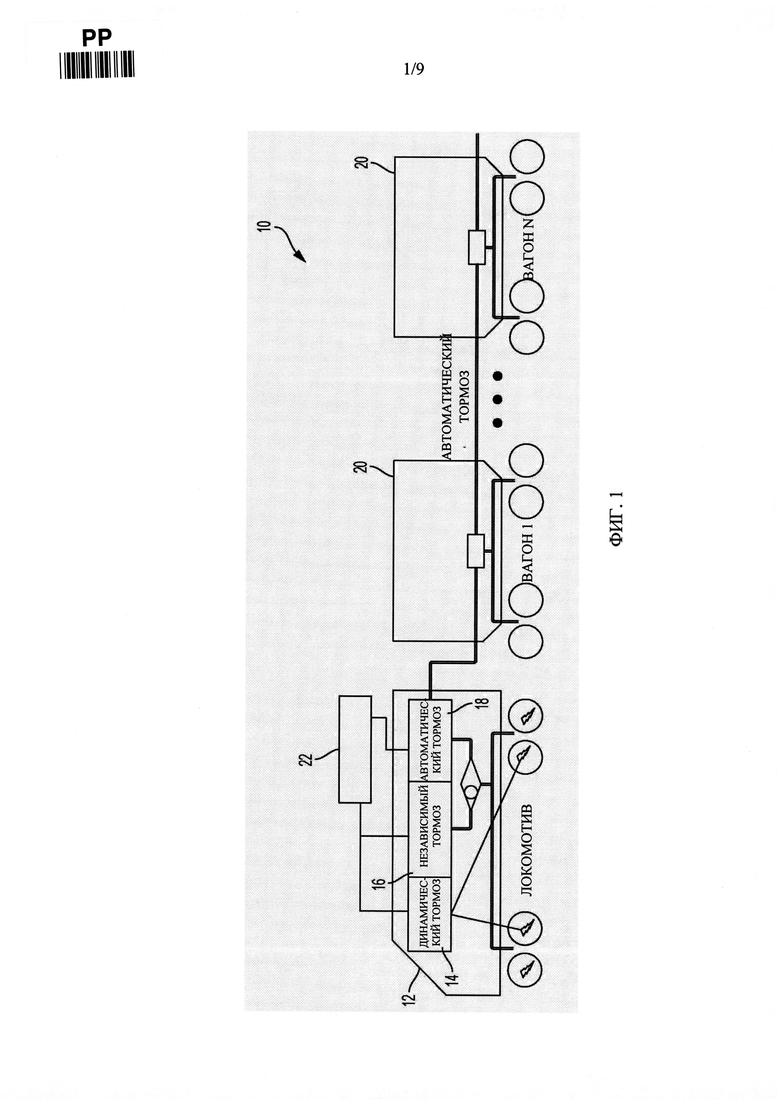
[0012] Фиг. 1 представляет собой схему интеллектуальной системы управления тормозами, соединенной по интерфейсу с тормозными системами локомотива, в соответствии с настоящим изобретением;
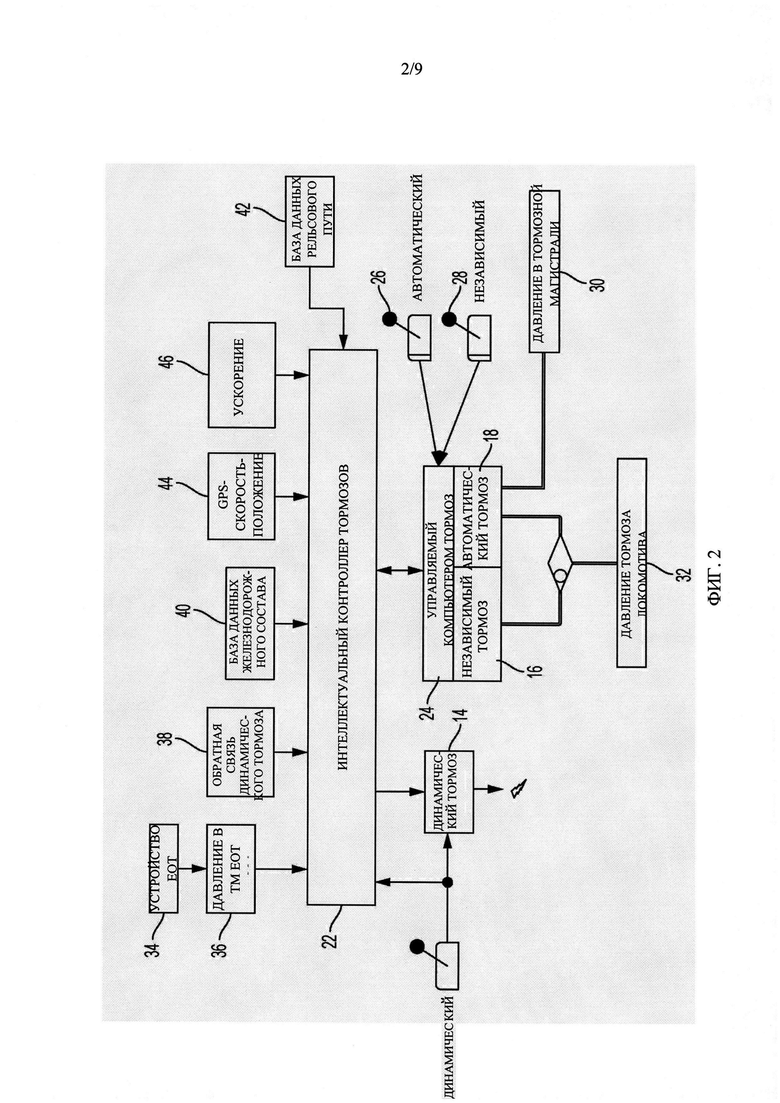
[0013] Фиг. 2 представляет собой схему интеллектуальной системы управления тормозами для локомотива, в соответствии с настоящим изобретением; и
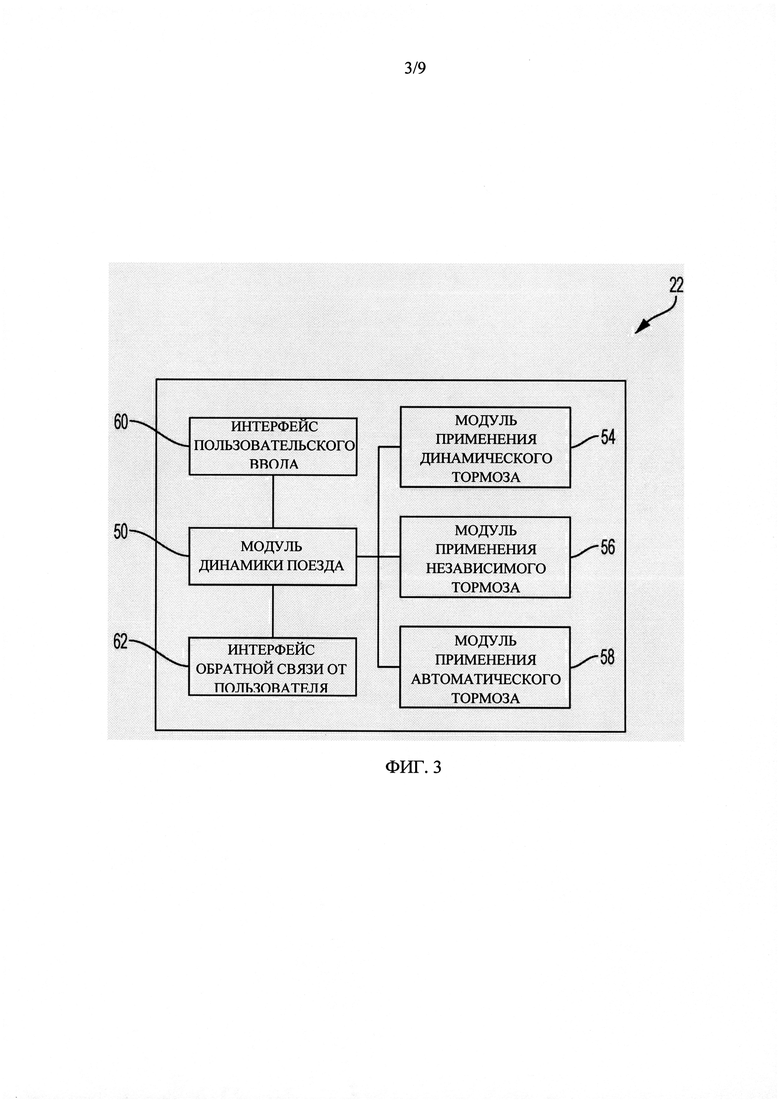
[0014] Фиг. 3 представляет собой схему контроллера для интеллектуальной системы управления тормозами для локомотива, в соответствии с настоящим изобретением;
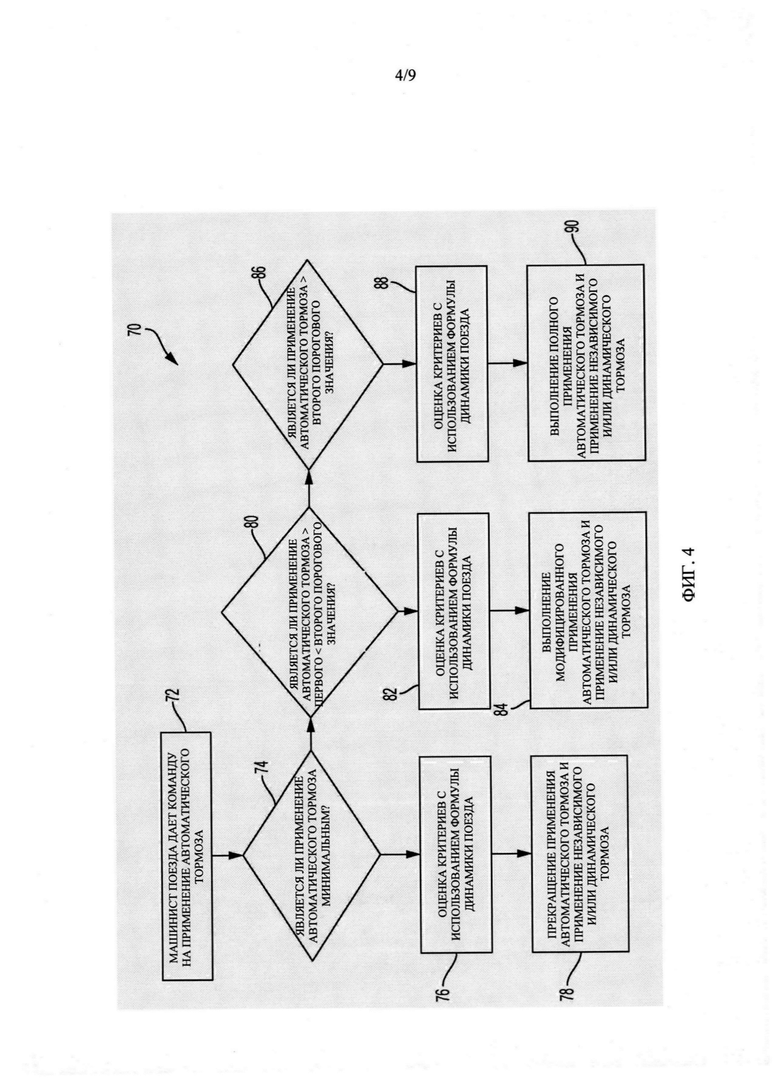
[0015] Фиг. 4 представляет собой блок-схему способа управления интеллектуальной системой управления тормозами, в соответствии с настоящим изобретением;
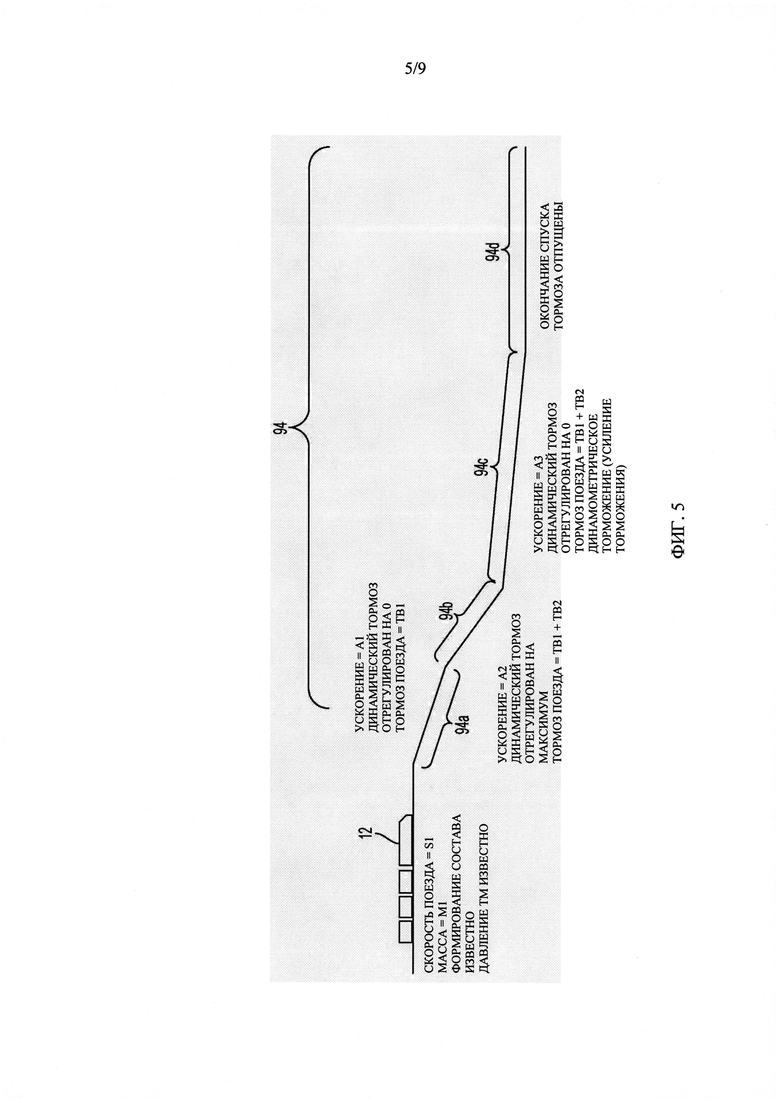
[0016] Фиг. 5 представляет собой схему сегментированного подхода на спуске, реализованного интеллектуальной системой управления тормозами, в соответствии с настоящим изобретением;
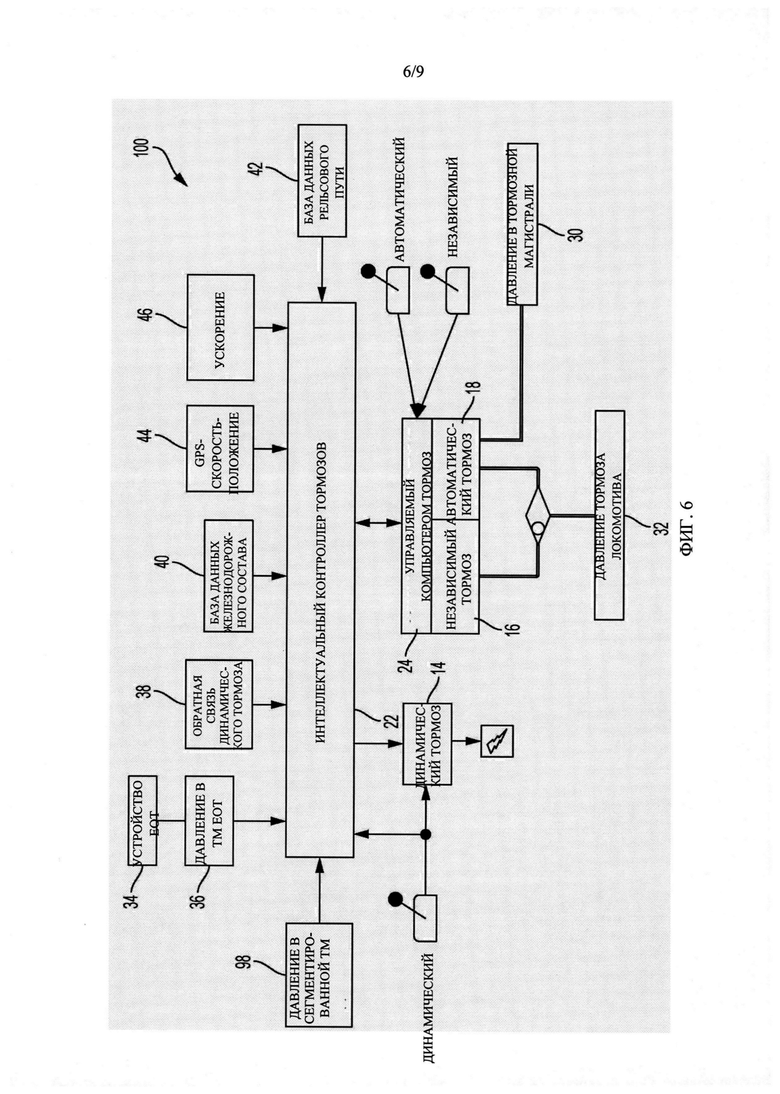
[0017] Фиг. 6 представляет собой схему интеллектуальной системы управления тормозами для применения с сегментированной тормозной системой поезда, в соответствии с настоящим изобретением;
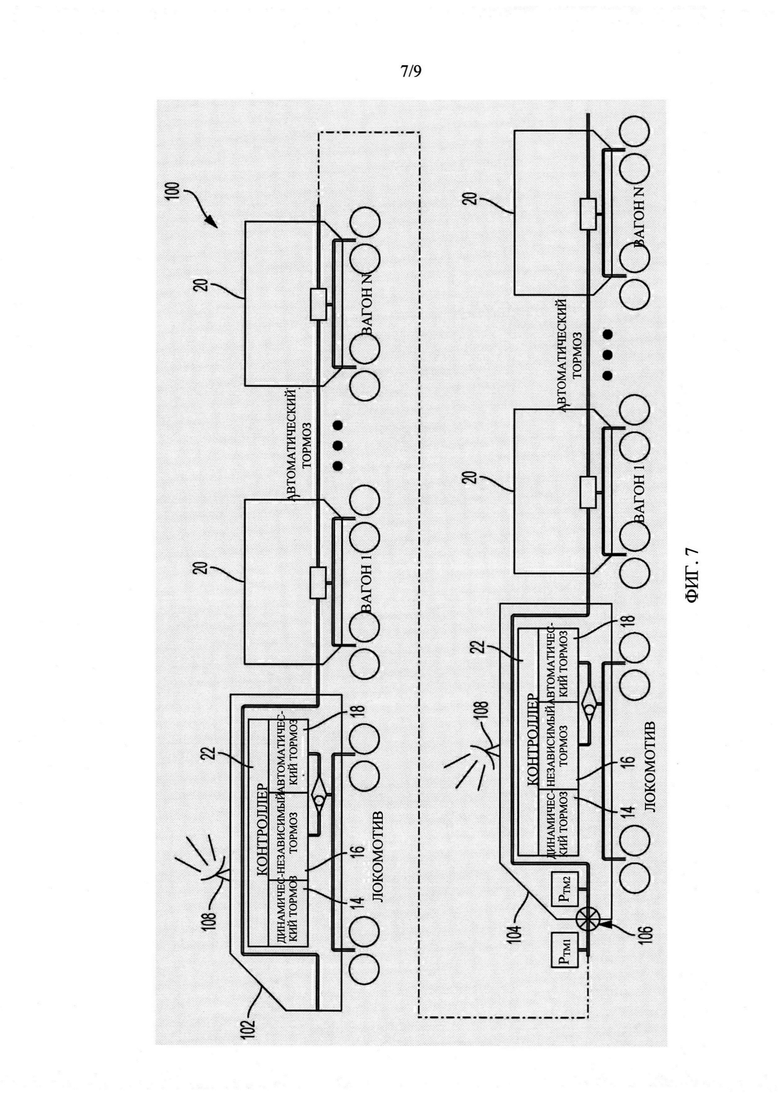
[0018] Фиг. 7 представляет собой схему поезда, содержащего сегментированную тормозную систему поезда, которая снабжена интеллектуальной системой управления тормозами, в соответствии с настоящим изобретением; и
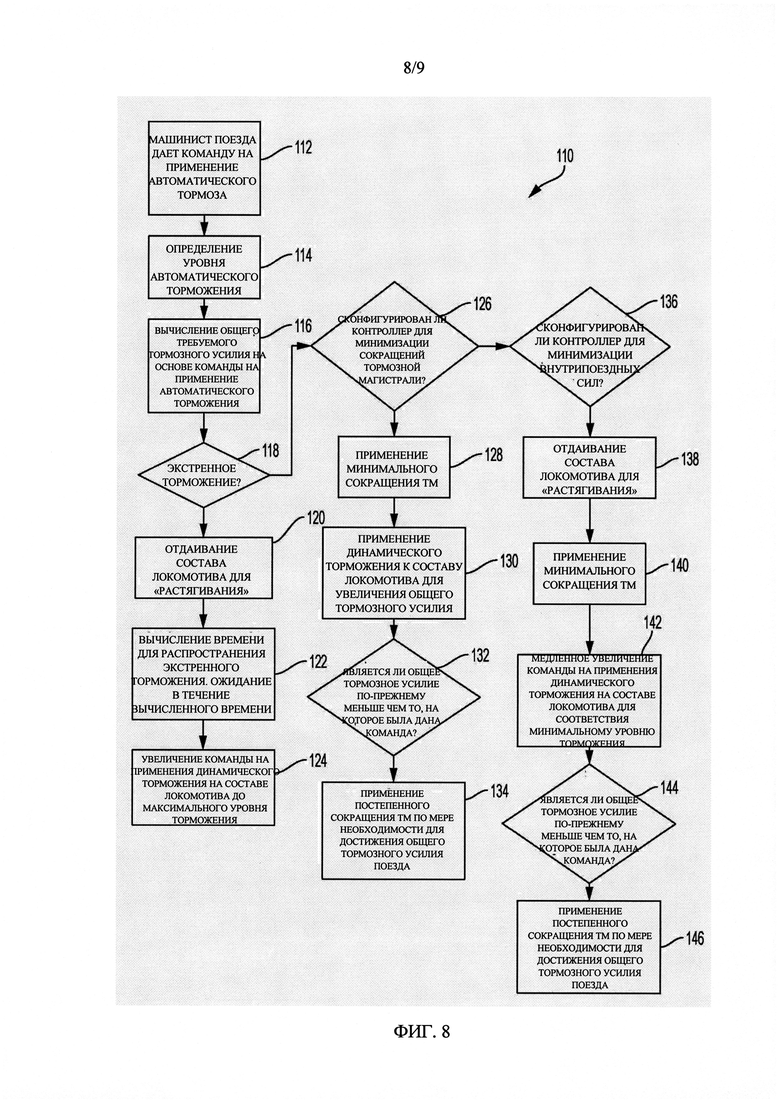
[0019] Фиг. 8 представляет собой блок-схему способа управления автоматическим тормозом, в соответствии с настоящим изобретением; и
[0020] Фиг. 9 представляет собой способ управления динамическим тормозом, в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0021] Ссылаясь на чертежи, на которых подобные ссылочные обозначения везде относятся к подобным частям, на фиг. 1 можно увидеть интеллектуальную систему 10 управления тормозами для локомотива 12, которая соединена по интерфейсу с имеющимися в локомотиве динамическим тормозом 14 и независимым тормозом 16, а также с автоматическим тормозом 18, которая применяет тормоза одного или более железнодорожных вагонов 20, которые тянет локомотив 12. Система 10 может быть выполнена в виде автономной системы, интегрирована в компьютерный контроллер тормоза локомотива или расположена в системе управления питанием (или в виде комбинации этого).
[0022] Ссылаясь на фиг. 2, система 10 содержит основной контроллер 22, который находится в связи с управляемым компьютером тормозом 24 локомотива или представляет собой его часть. Управляемый компьютером тормоз 24 представляет собой оборудование локомотива, используемое для реагирования на вводы машиниста поезда путем исполнения или выдачи команд в виде настроек тормоза, выбранных машинистом поезда, такое как управляемый компьютером тормоз ССВ II®, доступный от компании «New York Air Brake, LLC», Уотертаун, Нью-Йорк. Как известно из уровня техники, управляемый компьютером тормоз 24 принимает сигналы, генерируемые рукояткой 26 автоматического тормоза и рукояткой 28 независимого тормоза, которые расположены в кабине локомотива и отвечают за преобразование вводов пользователя на рукоятки в команды тормозной системы, такие как изменения давления 30 в тормозной магистрали (ТМ), используемые для выборочного применения и отпускания тормозов присоединенных железнодорожных вагонов 20, и изменения давления 32 тормоза локомотива, используемые для выборочного применения и отпускания тормозов локомотива.
[0023] Контроллер 22 также находится в связи с устройством 34 в хвосте поезда (EOT) для получения давления 36 в тормозной магистрали EOT, которое выдает информацию о распространении сигналов торможения по длине поезда и которое может быть определено путем сравнения давления в тормозной магистрали в голове поезда с давлением в тормозной магистрали в хвосте. Во время отпускания и перезарядки тормоза, например, контроллер 22 может определить коэффициент сглаживания тормозной магистрали поезда (Давление в тормозной магистралилокомотива - Давление в тормозной магистралиЕОТ) и считывать поток воздуха в тормозную магистраль локомотива 12 с датчика потока воздуха в тормозной магистрали, а также определять состояния перезарядки тормозной системы и тормозных резервуаров на поезде. Контроллер 22 находится в связи с динамическим тормозом 14 для выборочного применения и отпускания динамического тормоза 14, а также с модулем 38 обратной связи динамического тормоза, который выдает информацию о состоянии тока динамического тормоза в элементах реостата в динамическом тормозе. Сила динамического тормоза зависит от скорости поезда, при этом стандартная кривая динамического тормоза известна из уровня техники и может быть использована для этой цели. Контроллер 22 может получать скорость поезда от GPS 44 и получать ток обратной связи динамического тормоза, который пропорционален силе торможения динамическим тормозом при этой скорости, сравнивать скорость и ток обратной связи динамического тормоза с характеристической кривой динамического тормоза для этого локомотива для определения силы динамического тормоза, выданной на поезд. Контроллер 22 также находится в связи с базой 40 данных железнодорожного состава, которая выдает информацию о составляющих конкретного поезда, такую как количество и тип локомотивов в составе, количество железнодорожных вагонов, вес железнодорожных вагонов и т.д., которая необходима для надлежащего определения динамики поезда. Контроллер 22 находится в связи с базой 42 данных рельсового пути, содержащей информацию о рельсовом пути, по которому должен проходить поезд, такую как спуск и кривизна каждой секции рельсового пути по маршруту. Контроллер 22 также находится в связи с устройством 44 определения местоположения, которое идентифицирует местоположение поезда на рельсовом пути, а также то, насколько быстро и в каком направлении он двигается, что, например, обеспечивается системой глобального позиционирования (GPS). Наконец, контроллер 22 может находиться в связи с акселерометром 46, который выдает данные об изменении скорости поезда.
[0024] Ссылаясь на фиг. 3, контроллер 22 содержит модуль 50 динамики поезда, который запрограммирован на исполнение традиционной формулы динамики поезда с использованием различных данных и информации, выданных устройством 34 EOT, динамический тормоз 14, базу 40 данных железнодорожного состава, базу 42 данных рельсового пути, устройство 44 определения местоположения и, необязательно, акселерометр 46 для определения внутрипоездных сил по мере передвижения поезда по рельсовому пути. Лежащие в основе вычисления основаны на законах физики и в настоящее время используются системами управления в поездах, такими как система LEADER®, доступная от компании «New York Air Brake, LLC», Уотертаун, Нью-Йорк, для определения текущего поведения поезда и для прогнозирования того, как поезд себя поведет в ближайшее время на основе его текущей динамики, также спуска и кривизны приближающегося рельсового пути.
[0025] Контроллер 22 дополнительно содержит модуль 54 применения динамического тормоза, модуль 56 применения независимого тормоза и модуль 58 применения автоматического тормоза. Эти модули запрограммированы на выборочное применение или отпускание соответствующих тормозов в ответ на сигналы, принятые от автоматической рукоятки 26 и независимой рукоятки 28 через интерфейс 60 пользовательского ввода. Например, модуль 54 применения динамического тормоза и модуль 56 применения независимого тормоза могут быть запрограммированы на выборочное применение или отпускание динамического тормоза и/или независимого тормоза в ответ на выполнение команды автоматического тормоза машинистом поезда с использованием рукоятки 26 автоматического тормоза на основе текущей динамики поезда, определенной модулем 50 динамики поезда. Применение или отпускание динамического тормоза и/или независимого тормоза модулем 54 применения динамического тормоза и модулем 56 применения независимого тормоза может выполняться в дополнение или заменяя применение автоматического тормоза, что в противном случае выполнялось бы в ответ на ввод машиниста.
[0026] Контроллер 22 запрограммирован на определение того, применять или отпускать ли динамический тормоз и/или независимый тормоз на основе одного или более заранее определенных критериев, таких как минимизация внутрипоездных сил, минимизация потребности в последующем динамометрическом торможении и минимизация использования расходных деталей системы, при этом обеспечивая ответ, ожидаемый машинистом поезда, на основе ввода исходной команды на автоматический тормоз посредством рукоятки 26. Необязательно, контроллер 22 может быть запрограммирован на использование информации об ускорении от акселерометра 46 (или вычисление ускорения из изменений скорости с течением времени) для определения эффективности различных комбинаций трех тормозных систем с целью определения того, какая комбинация или комбинации наилучшим образом достигают желаемого результата, и для последующей динамической оптимизации динамики поезда, используемой модулем 50 динамики поезда, для улучшенного торможения в дальнейшем.
[0027] Ссылаясь на фиг. 4, контроллер 22 может быть выполнен с возможностью регулировки своей стратегии управления тормозами в зависимости от величины команды на автоматический тормоз, выданной машинистом поезда. Контроллер 22 может считывать команду на автоматический тормоз, вычислять ожидаемую производительность тормоза поезда и вычислять стратегию чередования тормозов, которая обеспечивает такое же тормозное усилие поезда, но оптимизированное, на основе одного или более заранее определенных критериев, таких как минимизация внутрипоездных сил, минимизация потребности в последующем динамометрическом торможении и минимизация использования расходных деталей системы. Более конкретно, контроллер 22 может быть запрограммирован на прекращение какого-либо применения автоматического тормоза, инициированного машинистом поезда, и выдачу команды на применение независимого тормоза или применение динамического тормоза, или их комбинации, что восполняет недостатки от прекращенного применения автоматического тормоза и достигает заранее определенных критериев, установленных пользователем. Например, контроллер 22 может исполнять команду процесса 70 перехода на автоматический поезд в ответ на команду машиниста поезда на применение 72 автоматического тормоза. Выполняется проверка 74 для определения того, является ли команда торможения командой автоматического торможения минимального уровня. Если это так, контроллер 22 оценивает 76 заранее определенные критерии торможения (минимизация внутрипоездных сил, минимизация потребности в последующем динамометрическом торможении, минимизация использования расходных деталей системы и т.д.) с использованием формулы динамики поезда и затем применяет 78 достаточное количество только динамических и/или независимых тормозов для удовлетворения критериям без применения тормозов железнодорожных вагонов. Если при проверке 74 было определено, что было запрошено более чем применение минимального торможения, выполняется вторая проверка 80 для определения того, превышает ли команда 72 на применение автоматического тормоза первое заранее определенное пороговое значение понижения в тормозной магистрали, такое как 7 фунтов/кв. дюйм, но не превышает второго пороговое значение, такое как 15 фунтов/кв. дюйм. Если это так, контроллер 22 может оценить 82 критерии с использованием динамики поезда и затем выполнить применение пониженного автоматического тормоза поезда, которое усиливается применением 84 независимого и/или динамического тормоза для обеспечения необходимого тормозного усилия. Если команда 72 торможения не удовлетворяет проверке 80, выполняется третья проверка 86 для определения того, превышает ли команда 72 на применение автоматического тормоза второе заранее определенное пороговое значение, такое как 15 фунтов/кв. дюйм. Если это так, контроллер 22 оценивает 88 критерии с использованием динамики поезда и полностью выполняет 90 необходимое применение автоматического тормоза поезда. Таким образом, контроллер 22 может регулировать величину прекращения применения автоматического тормоза между полной отменой применения автоматического тормоза при сценариях минимального применения и отсутствием отмены применения автоматического тормоза при экстренных сценариях.
[0028] Для применений автоматического тормоза поезда (плановых и/или экстренных), контроллер 22 может выборочно задавать последовательность применения динамических и/или независимых тормозов локомотива и тормозов поезда для минимизации внутрипоездных сил. Например, при некоторых комбинациях текущих состояний поезда и геометрии рельсового пути желательно сгруппировать поезд путем сначала применения тормозов локомотива, а затем путем применения тормоза поезда. При других комбинациях состояний поезда и геометрии рельсового пути желательно растягивать поезд путем сначала применения автоматического тормоза поезда, при этом отдаивая тормоз локомотива в течение некоторого периода. Контроллер 22 может быть запрограммирован на последующее регулирование или повторное применение тормозов локомотива как только желаемое группирование или растягивание было достигнуто. В поездах с сегментированной тормозной магистралью контроллер 22 может быть запрограммирован на торможение отдельных секций поезда. В поездах с электронным управлением (ЭУ) контроллер 22 может быть запрограммирован на торможение даже отдельных вагонов или секций поезда.
[0029] При применения автоматического тормоза, контроллер 22 может выборочно применять или динамический тормоз локомотива, или независимый тормоз локомотива вместо применения автоматического тормоза при частоте применения и уровне применения, которые вычислены для минимизации внутрипоездных сил. Количество тормозов, примененных на локомотиве, может варьироваться с течением времени в зависимости от состояния распространения торможения по поезда при применении, скорости поезда и геометрии рельсового пути. Предпочтительно, контроллер 22 также может применять динамический тормоз на локомотиве вместо или в дополнение к частичному автоматическому тормозу для минимизации износа тормозной колодки на локомотиве во время применения автоматического тормоза. Следует понимать, что применение конкретного тормоза, выбираемое контроллером 22, может быть конфигурируемым для любой конкретной установки, тем самым обеспечивая потребителю возможность оптимизации, согласно нуждам. Например, контроллер 22 может быть запрограммирован на предоставление большего веса для минимизации износа на грузовом поезде и большего веса для минимизации внутрипоездных сил на пассажирском поезде. Контроллер 22 также может быть запрограммирован на выполнение применение торможения, которое допускается или даже требуется, согласно правилам конкретной юрисдикции, таким как обнародованные Ассоциацией Американских железных дорог (AAR).
[0030] Таким образом, контроллер 22 может использоваться для обеспечения управления тормозом «от одной рукоятки», при котором машинист поезда должен лишь выполнить применение торможения посредством рукоятки 26 автоматического тормоза, при этом контроллер 22 автоматически обеспечивает оптимальное применение динамического и/или независимого тормоза, при наличии, без какого-либо дополнительного ввода со стороны машиниста поезда.
[0031] Контроллер 22 может содержать модуль 62 пользовательской обратной связи, который может находиться в связи с любым дисплеем машиниста и запрограммирован на управление дисплеем для отображения положений рукояток 26 и 28, в том числе с привязкой к интенсивности или проценту торможения, а не к приращениям фунта/кв. дюйм при понижении уравнительного резервуара (УР). Обратная связь для машиниста поезда также может быть выдана на EBV-дисплей. В типичном AAR-локомотиве, например, положение рукоятки автоматического тормоза пропорционально числу УР (давлению, которое управляет давлением тормозной магистрали в поезде). Таким образом, машинист поезда ожидает некоторые значения УР и ТМ давления для соответствующих положений рукоятки. Поскольку контроллер 22 использует все три доступные тормозные системы на поезде для оптимального удовлетворения запроса на торможение, сделанного машинистом поезда, текущие значение УР и ТМ давления могут быть не такими, как ожидалось. Изменение отображения обратной связи машинисту поезда может устранить данную проблему путем отображения процента торможения вместо или в дополнение к результирующему текущему понижению УР/ТМ.
[0032] Контроллер 22 также может автоматически восполнять недостатки от отказа динамического тормоза путем обеспечения эквивалентного применения независимого тормоза или применения автоматического тормоза. Например, если во время вызова динамического тормоза происходит отказ динамического тормоза, контроллер 22 получит уведомление об этом через модуль 38 обратной связи динамического тормоза и может автоматически обеспечить эквивалентное действие независимого тормоза или на всем составе локомотива, или только на локомотиве с отказанным динамическим тормозом. Таким образом, контроллер 22 может автоматически восполнять недостатки от потери усилия динамического тормоза путем выполнения эквивалентного уровня фрикционного торможения с использованием независимых тормозов всего локомотива или даже лишь отдельной тележки. Кроме того, если динамический тормоз ранее отказал, а машинист поезда невольно осуществляет применение динамического тормоза, контроллер 22 может автоматически обеспечить эквивалентное действие независимого тормоза. Эти восполняющие недостатки подходы в контроллере 22 существенно повышают безопасность поезда. При использовании акселерометра 46, контроллер 22 также может выполнять мониторинг эффективности применения тормоза каждого типа в заданном поезде при работе, а также регулировать будущие уровни применения торможения на основе мониторинга. Например, если в другом случае в подсоединенном локомотиве имеет место необнаруженный отказ динамического тормоза, ответ динамического тормоза будет слабее, чем ожидается у контроллера 22. В этом случае, контроллер 22 может применить дополнительное независимое торможение для выравнивания сниженной эффективности динамического тормоза.
[0033] Контроллер 22 может быть запрограммирован на обеспечение совместной работы динамического тормоза. Доступное усилие динамического тормоза зависит от скорости поезда. В частности, доступное усилие динамического тормоза снижается по мере приближения скорости поезда к нулю. Контроллер 22 может увеличивать потерю усилия динамического тормоза вследствие замедления поезда путем автоматического применения выравнивающей величины независимого торможения.
[0034] Контроллер 22 может быть запрограммирован на поддержание скорости поезда и/или снижения и поддержания скорости для соблюдения каких-либо ограничений скорости путем автоматического применения оптимальной комбинации динамических, независимых и автоматических тормозов. В данном режиме, контроллер 22 вычисляет минимальное необходимое применение автоматического тормоза для текущих условий и приближающегося спуска, а затем определяет соответствующее действие торможения для максимизации участия динамического тормоза/независимого тормоза с целью обеспечения максимальной способности регулирования тормоза для поезда в данной ситуации со спуском. Например, при приближении к длинному спуску, машинист поезда может выбрать опцию для регулирования автоматического тормоза для оптимального поддержания целевой скорости. При приближении к спуску, контроллер 22 может определять текущую скорость поезда и сравнивать ее с оптимальной скоростью для того чтобы начать преодолевать спуск. Контроллер 22 может замедлить поезд для снижения скорости до оптимальной скорости на входе по мере необходимости. Контроллер 22 затем может вычислить минимально необходимую величину автоматического торможения для всего спуска или для данной части спуска до тех пор, пока не будет безопасно отпустить и перезарядить автоматический тормоз. Контроллер 22 может применить автоматический тормоз по вычисленной величине. В зависимости от профиля рельсового пути, управление может разделить применение тормоза на одну или более ступеней торможения, т.е. слабое применение автоматического тормоза с последующим постепенным одним или более усиливающимися сильными применениями тормоза (автоматический тормоз на поезде может быть применен поэтапно, но может быть отпущен только за один этап, что называется одноступенчатым отпуском). Затем контроллер 22 может поддерживать целевую скорость путем регулирования динамическими и/или независимыми тормозами. Если поезд снабжен сегментированной тормозной магистралью, то контроллер может применять и отпускать автоматические тормоза в каждом сегменте тормозной магистрали асинхронно в дополнение к регулированию динамических и независимых тормозов. Режим управления автоматическим тормозом у контроллера 22 может быть прерван в ответ на любое последующее применение ручного тормоза, или в конце спуска, и соответствующее устранение необходимости в применении торможения для поддержания скорости поезда.
[0035] Контроллер 22 также может быть запрограммирован правилами, которые устанавливают минимальные возрастающие «ступени торможения» автоматическим тормозом поезда исходя из длины поезда в базе 40 данных железнодорожного состава, давления 36 в тормозной магистрали EOT от устройства 34 EOT на последнем вагоне, коэффициента сглаживания тормозной магистрали (давление ТМ на локомотиве минус давление ТМ в EOT), потока ТМ и связанных факторов. Подобным образом, контроллер 22 может быть запрограммирован на динамическую установку минимального применения автоматического тормоза на основе состояния перезарядки тормозов исходя из длины поезда, давления 36 в тормозной магистрали EOT, коэффициента сглаживания тормозной магистрали (давление ТМ на локомотиве минус давление ТМ в EOT), потока ТМ и связанных факторов. Если тормоза поезда только что были отпущены и тормоза должны быть немедленно повторно применены, то повторное применение должно быть больше чем применение тормоза, который только что был отпущен, для обеспечения распространения применения торможения по поезду. Если отпускание и перезарядка частично завершена, то повторное применение тормоза должно быть больше чем коэффициент сглаживания тормозной магистрали, измеренного в этот момент времени, или, предпочтительно, если коэффициент сглаживания в устойчивом состоянии известен, на основе предыдущего измерения, когда тормоза полностью отпущены и перезаряжены, то повторное применение должно быть по меньшей мере, в качестве примера:
[Коэффициент сглаживания тормозной магистрали]текущий - [Коэффициент сглаживания тормозной магистрали]устойчивое состояние
или по меньшей мере 6 фунтов/кв. дюйм торможения тормозной магистрали, смотря что из них больше. Контроллер 22 также может увеличивать уровень торможения поезда, если контроллер 22 определяет, что тормозная способность поезда заряжена менее чем на 100 процентов. Этот подход с восполнением недостатков особенно важен для поездов, которые выполняют торможение путем понижения давления в тормозной магистрали поезда для того чтобы заставить воздух течь из резервуаров для хранения сжатого воздуха в тормозные цилиндры отдельных железнодорожных вагонов. Контроллер 22 может выполнять мониторинг давления в тормозной магистрали, а также скорость потока воздуха из основного резервуара в тормозную магистраль, для вычисления уровня заряда в резервуарах для хранения сжатого воздуха в железнодорожных вагонах. Когда доступно, контроллер 22 также может использовать дополнительные параметры для дополнительного улучшения точности этого вычисления, такие как длину поезда. Когда контроллер 22 вычисляет то, что резервуары железнодорожных вагонов не полностью заряжены, контроллер 22 может выдать команду на более сильное сокращение тормозной магистрали чем немодифицированное значение для обеспечения эффективного применения автоматического тормоза.
[0036] Ссылаясь на фиг. 5, по мере приближения поезда, снабженного интеллектуальной системой управления тормозами локомотива, в соответствии с настоящим изобретением, приближается к спуску 94, контроллер 22 может вычислить теоретическое ускорение поезда за счет крутизны на постепенно приближающихся сегментах 94а-94с на спуске, предполагая, что никакие тормоза не применяются. Например, контроллер 22 может выполнять это вычисление с использованием профиля рельсового пути из базы 42 данных рельсового пути, составляющих характеристик поезда из базы 40 данных железнодорожного состава и известных моделей динамики поезда в модуле 50 динамики поезда. Затем, каждому сегменту 94а-94с профиля спуска может быть присвоено значение ускорения. Общее тормозное усилие поезда, требуемое для уравновешивания каждого сегмента профиля, может быть вычислено как F=MA, где М - это масса поезда, которая приблизительно известна из базы 40 данных железнодорожного состава, и где А - это ускорение за счет силы притяжения, как вычислено ранее.
[0037] Взаимосвязи между сгенерированным тормозным усилием и каждым из динамического, независимого и автоматического тормозов известны и зависят от формирования поезда, давления в тормозной магистрали, количества локомотивов и т.д., все из которых доступны контроллеру 22. Для определения оптимальной стратегии торможения, контроллер 22 сперва определяет общую мощность/усилие динамического тормоза, доступное в поезде, и вычитает его из F, общего требуемого тормозного усилия поезда, для каждого сегмента. Если доступная мощность/усилие превышает или равняется общему необходимому тормозному усилию поезда, то требуемое динамическое торможение будет установлено таким, чтобы равняться требуемой тормозной мощности поезда. Если доступное динамическое торможение меньше чем требуемая тормозная мощность поезда, контроллер 22 может определить то, что какой-либо из локомотивов 12 в составе не имеет доступных рабочих динамических тормозов. Если это так, то будет определено эквивалентное независимое торможение на этом локомотиве, и это дополнительное доступное тормозное усилие будет вычтено из общего требуемого тормозного усилия поезда. Оставшееся нереализованное общее требуемое тормозное усилие поезда может быть обеспечено автоматическим тормозом поезда. Контроллер 22 затем может вычислить требуемое сокращение тормозной магистрали, которое даст требуемое необходимое тормозное усилие. Если вычисленное сокращение тормозной магистрали меньше чем «минимальное» сокращение, то контроллер 22 может вычислить тормозное усилие поезда, являющееся результатом минимального применения автоматического тормоза, вычитает это число из общего требуемого тормозного усилия поезда и присваивает оставшееся требуемое тормозное усилие динамическому тормозу и/или независимому тормозу, как описано ранее.
[0038] Контроллер 22 может определить стратегию торможения для каждого сегмента 94а-94с крутизны, в том числе по меньшей мере для одного концевого сегмента 94d, где контроллер 22 вычисляет то, что автоматический тормоз может быть полностью отпущен и перезаряжен перед возможной потребностью в следующем применении автоматического тормоза. Контроллер 22 затем сравнивает стратегию торможения для каждого из находящихся друг рядом с другом сегментов 94а-94с крутизны и определяет то, какой сегмент требует наивысшего уровня автоматического торможения. Поскольку автоматический тормоз может усиливаться, но не ослабевать, как только автоматический тормоз был применен на высоком уровне, стратегия торможения для всех последующих сегментов крутизны будет пересчитана как общее требуемое тормозное усилие поезда для этого сегмента минус усилие автоматического тормоза поезда. Если разница положительная, то контроллер 22 может уравновесить спуск посредством динамического тормоза или, в качестве альтернативы, независимого тормоза. Если разница отрицательная, то контроллер 22 может выдать рекомендацию машинисту поезда на усиление применения рукоятки дросселя локомотива и выполнение динамометрического торможения.
[0039] Тогда как первая стратегия управления может быть направлена на поддержание постоянной скорости путем регулирования доступных тормозов по всему профилю спуска, альтернативная стратегия управления может быть направлена на минимизацию динамометрического торможения путем управления скоростью поезда в более широком диапазоне ограничений. Например, для минимизации максимального усилия автоматического тормоза поезда, необходимого вместе со способами, для полного использования описанного выше динамического и независимого тормоза, контроллер 22 может установить исходный тормоз на снижение скорости поезда в точке входа в крутой сегмент рельсового пути и выбрать уровень автоматического тормоза, который позволяет поезду ускоряться при торможении, но при такой скорости, что поезд не превышает ограничение скорости до того времени, пока он не преодолел крутую секцию рельсового пути. При работе, по мере фактического прохождения каждого сегмента 94а-94с крутизны, контроллер 22 сперва будет управлять тормозами согласно заранее определенной стратегии торможения, а затем улучшать план исходя из текущей скорости, ускорения или замедления поезда. Контроллер 22 будет отдавать приоритет управлению скоростью поезда и ускорением/замедлением путем регулирования динамического тормоза в первую очередь, независимого тормоза во вторую очередь и автоматического тормоза в последнюю очередь. Ясно, что несмотря на то, что вычисления были описаны в понятиях тормозного усилия, массы поезда и ускорения, они также могут быть выполнены в понятиях энергии поезда (кинетической и потенциальной) и мощности поезда, или других совместимых единиц измерения.
[0040] Контроллер 22 также может быть запрограммирован на автоматическое восполнение недостатков от отказа независимого тормоза путем автоматического применения какого-либо или всех из динамического тормоза, автоматического тормоза или, в некоторых случаях, механического ручного тормоза на локомотиве 12. Один локомотив 12 или состав локомотивов 12 без каких-либо присоединенных железнодорожных вагонов называется «отцепленным» локомотивом или составом. Независимое торможение генерируется на ведущем локомотиве 12 и передается на какие-либо ведомые локомотивы 12 по тормозной магистрали 20. Если концевой кран магистрали 20 на крайнем конце отцепленного локомотива 12 (или отцепленного состава) открыт, то давление в магистрали 20 будет выбрасываться в атмосферу, а независимые тормоза не будут применяться. Это может представлять собой серьезную угрозу безопасности, особенно когда локомотив 12 находится в непосредственной близости к грузовой железнодорожной станции. Таким образом, контроллер 20 может содержать ввод, отражающий давление в магистрали 20, в дополнение к команде 28 на применение независимого тормоза, выданной машинистом поезда. Когда команда 28 на применение независимого тормоза не обеспечивает требуемого давления в магистрали 20, контроллер 12 может быть запрограммирован на автоматическое обеспечение применения автоматического тормоза, на применение динамического тормоза, если скорость локомотива достаточна и тормозная магистраль заряжена на отцепленном локомотиве, или на применение механического ручного тормоза на отцепленном локомотиве 12.
[0041] Ссылаясь на фиг. 6 и 7, настоящее изобретение может быть встроено в сегментированную тормозную систему 100 поезда путем включения ввода 98 давления в сегментированной тормозной магистрали в контроллер 22. В сегментированной тормозной системе 100 тормозная магистраль заключена между ведущим составом 102 локомотива и отдаленным составом 104 локомотива с помощью устройства 106 сегментации тормозной магистрали таким образом, что обслуживающие применения и отпускания тормоза могут выполняться независимо в каждом сегменте ВР1 и ВР2 (или более) тормозной магистрали. Применения экстренного торможения происходят синхронно или являются одинаковыми во всех сегментах. Несмотря на то, что системы сегментированной тормозной магистрали известны и были реализованы с использованием приемопередатчиков 108, работающих по беспроводной связи, подобно тем, что используются в распределенных силовых системах, таких как Locotrol®, использование подхода с сегментированной тормозной магистралью не нашло широкого применения вследствие сложности выполняемого вручную управления. Контроллер 22 устраняет данный недостаток за счет учета топологии рельсового пути, формирования поезда, скорости поезда, местоположения поезда на топологии рельсового пути и модели динамики поезда, устанавливаемой набором правил, что минимизирует внутрипоездные силы, износ и ухудшение качества компонентов, а также потребление энергии, при этом поддерживая высокую степень безопасности, как описано выше. В поезде, который содержит интеллектуальный контроллер 22 торможения и сегментированную тормозную магистраль в одном или более отдаленных составах 104 локомотива, контроллер 22 на ведущем составе 102 локомотива может автономно выдавать команду на применение и отпускание тормозов на отдаленном(ых) составе(ах) асинхронно, то есть каждый сегмент поезда может иметь разное состояние команды на применение автоматического тормоза. Таким образом, поезд может двигаться по волнообразной территории, например, с примененными тормозами в сегменте поезда, который находится на спуске, тогда как тормоза могут быть отпущены на том сегменте поезда, который находится на противоположном градиенте (подъеме). Подобным образом, если поезд двигается по длинному спуску с понижающимся градиентом вместо динамометрического торможения для поддержания скорости поезда, контроллер 22 может выбрать отпускание и перезарядку одного или более сегментом тормозной магистрали, при этом сохраняя торможение в других сегментах поезда, как определено набором правил, определяющим модель динамики поезда.
[0042] В случае утери связи между управляющим ведущим локомотивом и управляемым отдаленным локомотивом, контроллер 22 на удаленном составе 104, который имеет такой же модуль 50 динамики поезда, базу 42 данных рельсового пути, устройство 44 GPS-позиционирования и т.д., может работать автономно в режиме утери связи. Контроллер 22 на отдаленном локомотиве 104 также может иметь вводы давления тормозной магистрали с обеих сторон сегментированной тормозной магистрали, т.е. ВР1 и ВР2, на этом локомотиве. В случае утери связи, контроллер 22 отдаленного локомотива 104 может считать давление тормозной магистрали в соседнем сегменте тормозной магистрали для определения команд на применение торможения поезда в соседнем сегменте и автоматического выполнения такого же действия торможения на своей управляемой сегментированной тормозной магистрали.
[0043] Ссылаясь на фиг. 8, иллюстративный процесс 110 управления автоматическим тормозом начинается с выдачи 112 машинистом поезда команды на применение автоматического тормоза. Затем определяют 114 уровень автоматического торможения и затем вычисляют 116 общее тормозное усилие поезда, которое требуется командой на применение автоматического тормоза. Выполняют проверку 118 для определения того, является ли применение торможения экстренным торможением. Если это так, то состав локомотива отдаивают 120 для растягивания поезда. Затем вычисляют 122 время распространения экстренного торможения на основе данных поезда и выполняют экстренное торможение для этого периода времени. Сразу по прошествии времени, динамическое торможение увеличивают 124 на составе локомотива до максимального уровня торможения.
[0044] Если на проверке 118 не определена выдача команды на применение экстренного торможения, выполняется проверка 126 для определения того, сконфигурирован ли контроллер 22 минимизировать сокращения тормозной магистрали. Если это так, применяют 128 минимальное сокращение тормозной магистрали и применяют 130 динамическое торможение к составу локомотива для увеличения общего тормозного усилия. Проверку 132 выполняют для определения того, является ли общее тормозное усилие меньше чем то, на которое была выдана команда, и, если это так, то постепенно увеличивают 132 сокращение тормозной магистрали до тех пор, пока общая величина тормозного усилия не достигнет того, на которое была выдана команда.
[0045] Если при проверке 126 определено, что контроллер 22 не сконфигурирован для минимизации сокращений тормозной магистрали, выполняют проверку 136 для определения того, сконфигурирован ли контроллер 22 для минимизации внутрипоездных сил. Если это так, то состав локомотива отдаивают 138 для растягивания поезда. Затем применяют 140 минимальное сокращение тормозной магистрали и медленно увеличивают 142 динамическое торможение на составе локомотива для соответствия минимальному уровню торможения. Проверку 144 выполняют для определения того, является ли общее тормозное усилие меньше чем то, на которое была выдана команда, и, если это так, то постепенно увеличивают 146 сокращение тормозной магистрали до тех пор, пока общая величина тормозного усилия не достигнет того, на которое была выдана команда.
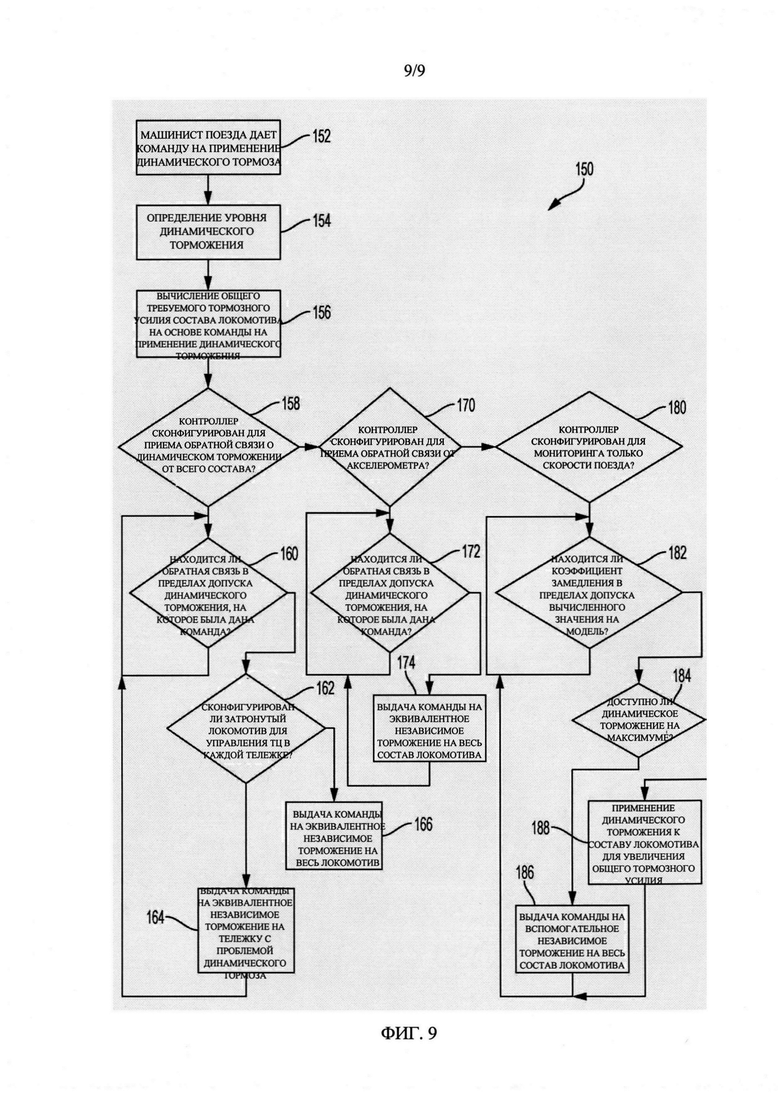
[0046] Ссылаясь на фиг. 9, иллюстративный процесс 150 управления динамическим тормозом начинается с выдачи 152 машинистом поезда команды на применение динамического тормоза. Затем определяют 154 уровень динамического торможения и затем вычисляют 156 общее тормозное усилие состава локомотива, которое требуется командой на применение динамического тормоза. Выполняют проверку 158 для определения того, сконфигурирован ли контроллер 22 на прием обратной связи о динамическом торможении от всего состава. Если это так, выполняют проверку 160 для определения того, находится ли обратная связь в пределах допуска динамического торможения, на которое была выдана команда. Если это так, то проверку 160 повторяют. Если нет, выполняют проверку 162 для определения того, сконфигурирован ли локомотив вне пределов допуска для управления тормозными цилиндрами в каждой тележке. Если это так, то на тележку вне пределов допуска выдают 164 команду на применение независимого торможения, эквивалентного динамическому торможения. Если локомотив вне пределов допуска не сконфигурирован для управления ТЦ в каждой тележке, выдают 166 команду на применение эквивалентного независимого торможения на весь локомотив.
[0047] Если при проверке 158 определено, что контроллер 22 не сконфигурирован для приема обратной связи о динамическом торможении от всего состава, то выполняют проверку 170 для определения того, сконфигурирован ли контроллер 22 для приема обратной связи от акселерометра. Если это так, выполняют проверку 172 для определения того, находится ли обратная связь в пределах допуска динамического торможения, на которое была выдана команда. Если это так, то проверку 172 повторяют. Если нет, то на состав локомотива выдают 174 команду на применение эквивалентного независимого торможения и управление переходит обратно к проверке 172.
[0048] Если при проверке 170 определено, что контроллер 22 не сконфигурирован для приема обратной связи от акселерометра, выполняют проверку 180 для определения того, сконфигурирован ли контроллер 22 для выполнения мониторинга скорости поезда. Если это так, выполняют проверку 182 для определения того, находится ли коэффициент замедления в пределах допуска вычисленного замедления, с использованием моделирования динамики поезда. Если это так, то проверку 182 повторяют. Если нет, то выполняют проверку 184 для определения того, находится ли динамическое торможение на максимально допустимом уровне. Если это так, то на состав локомотива выдают 186 команду на применение вспомогательного независимого торможения. Если нет, динамическое торможение усиливают 188 на составе локомотива для увеличения общего тормозного усилия и управление переходит обратно на проверку 182.
[0049] Как описано выше, настоящее изобретение может представлять собой систему, способ и/или компьютерную программу, связанную с ним, и описано в данном документе со ссылкой на блок-схемы и блок-диаграммы способов и систем. Блок-схема и блок-диаграммы иллюстрируют архитектуру, функционал и работу возможных реализаций систем, способов и компьютерных программ, согласно настоящему изобретению. Следует понимать, что каждый блок в блок-схемах и блок-диаграммах может быть реализован с помощью машиночитаемых программных инструкций в программном обеспечении, встроенном программном обеспечении или аналоговых или цифровых схемах специального назначения. Эти машиночитаемые программные инструкции могут быть реализованы на процессоре компьютера общего назначения, компьютера специального назначения или другого программируемого устройства для обработки данных для создания машины, которая реализует часть или любые из блоков в блок-схемах и блок-диаграммах. Каждый блок в блок-схеме или блок-диаграммах может представлять собой модуль, сегмент или фрагмент инструкций, который включает в себя одну или более исполняемых инструкций для реализации указанных логических функций. Следует также отметить, что каждый блок в блок-диаграммах и на иллюстрациях блок-схемы, или комбинации блоков в блок-диаграммах и блок-схемах, может быть реализован с помощью специализированных аппаратных систем, которые используют указанные функции или действия, или реализуют комбинации специализированных устройств и компьютерных инструкций.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОБМЕНА МЕСТАМИ ВЕДУЩЕГО И ОТДАЛЕННОГО ЛОКОМОТИВОВ В ЖЕЛЕЗНОДОРОЖНОМ СОСТАВЕ С РАСПРЕДЕЛЕННОЙ ЭНЕРГИЕЙ | 2005 |
|
RU2387552C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2474507C2 |
| БЕЗОПАСНЫЙ ЛОКОМОТИВНЫЙ ОБЪЕДИНЕННЫЙ КОМПЛЕКС | 2011 |
|
RU2475396C1 |
| Сетевая система безопасности, использующая путевые сигналы для оптимизации вождения поезда по основной железной дороге | 2013 |
|
RU2644069C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ПОЕЗДОВ КОМПЛЕКСНАЯ | 2019 |
|
RU2732495C1 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗОМ ПОДВИЖНОГО СОСТАВА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2614468C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| СПОСОБ И СИСТЕМА РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ | 2014 |
|
RU2571000C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ВНУТРИПОЕЗДНЫХ СИЛ ПОЕЗДА | 2007 |
|
RU2424933C2 |
| Устройство контроля целостности тормозной системы железнодорожного транспортного средства | 2024 |
|
RU2828313C1 |
Предложена тормозная система поезда. Тормозная система поезда содержит: интерфейс для приема ввода от машиниста поезда с помощью рукоятки автоматического тормоза, рукоятки независимого тормоза и рукоятки динамического тормоза; контроллер, соединенный с интерфейсом и имеющий первый модуль для выдачи команды на применение динамического тормоза, второй модуль для выдачи команды на применение независимого тормоза и третий модуль для выдачи команды на применение автоматического тормоза поезда. При этом контроллер запрограммирован на прекращение применения автоматического тормоза, инициированного машинистом поезда, и на выдачу команды на применение независимого тормоза или применение динамического тормоза, или их комбинации, для восполнения недостатков от прекращенного применения автоматического тормоза и для достижения по меньшей мере одного заранее определенного критерия. Предложен также способ управления тормозной системой поезда. Достигается повышение безопасности. 2 н. и 13 з.п. ф-лы, 9 ил.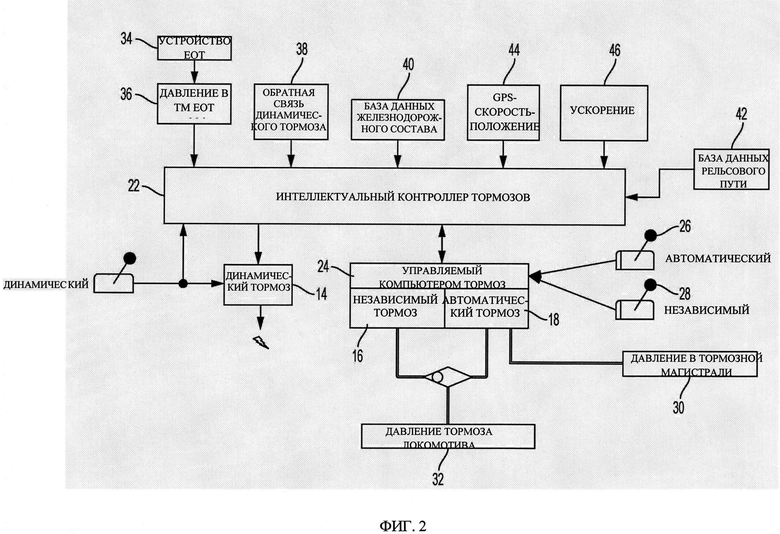
1. Тормозная система поезда, содержащая:
интерфейс для приема ввода от машиниста поезда с помощью рукоятки автоматического тормоза, рукоятки независимого тормоза и рукоятки динамического тормоза;
контроллер, соединенный с интерфейсом и имеющий первый модуль для выдачи команды на применение динамического тормоза, второй модуль для выдачи команды на применение независимого тормоза и третий модуль для выдачи команды на применение автоматического тормоза поезда;
отличающаяся тем, что контроллер запрограммирован на прекращение применения автоматического тормоза, инициированного машинистом поезда, и на выдачу команды на применение независимого тормоза или применение динамического тормоза, или их комбинации, для восполнения недостатков от прекращенного применения автоматического тормоза и для достижения по меньшей мере одного заранее определенного критерия.
2. Система по п. 1, отличающаяся тем, что применение независимого тормоза или применение динамического тормоза, или их комбинация, на которое выдает команду контроллер, будет достигать эффекта торможения, который равен применению автоматического тормоза, инициированному машинистом поезда.
3. Система по п. 2, отличающаяся тем, что заранее определенные критерии содержат по меньшей мере один критерий, выбранный из группы, состоящей из величины износа расходных деталей тормозной системы, количества результирующих внутрипоездных сил и величины последующего применения рабочего или автоматического тормоза без уменьшения тяги, которое может быть необходимо, и их комбинации.
4. Система по п. 3, отличающаяся тем, что контроллер содержит модуль динамики поезда, который может вычислять текущую и будущую работу поезда по заданному маршруту.
5. Система по п. 4, отличающаяся тем, что контроллер запрограммирован на использование модуля динамики поезда для выбора применения независимого тормоза или применения динамического тормоза, или их комбинации, которые достигнут эффекта торможения, который равен применению автоматического тормоза, инициированному машинистом поезда.
6. Система по п. 5, отличающаяся тем, что контроллер запрограммирован на автоматическое восполнение недостатков от отказа динамического тормоза путем выдачи команды на эквивалентное применение независимого тормоза или применение автоматического тормоза.
7. Система по п. 6, отличающаяся тем, что контроллер запрограммирован на получение обратной связи о работе поезда после применения независимого тормоза или применения динамического тормоза, или их комбинации, а также выполнять регулировку модуля динамики поезда, если поезд не ведет себя так, как ожидалось.
8. Система по п. 7, отличающаяся тем, что контроллер запрограммирован на поддержание конкретной скорости поезда путем автоматической выдачи команды на применение динамического тормоза, применение независимого тормоза или применение автоматического тормоза, или их комбинации.
9. Система по п. 7, отличающаяся тем, что контроллер запрограммирован на восполнение недостатков состояния тормозной системы поезда при определении применения независимого тормоза или применения динамического тормоза, или их комбинации, которые достигнут эффекта торможения, который равен применению автоматического тормоза, инициированному машинистом поезда.
10. Способ управления тормозной системой поезда, включающий следующие этапы:
обеспечение интерфейса для приема ввода от машиниста поезда с помощью рукоятки автоматического тормоза и рукоятки динамического тормоза, контроллера, соединенного с интерфейсом и имеющего первый модуль для выдачи команды на применение динамического тормоза, второй модуль для выдачи команды на применение независимого тормоза и третий модуль для выдачи команды на применение автоматического тормоза поезда; и
использование контроллера для прекращения применения автоматического тормоза, инициированного машинистом поезда, и выдачи команды на применение независимого тормоза или применение динамического тормоза, или их комбинации, который восполняет недостатки от прекращенного применения автоматического тормоза и достигает по меньшей мере одного заранее определенного критерия.
11. Способ по п. 10, отличающийся тем, что применение независимого тормоза или применение динамического тормоза, или их комбинация, на которое выдает команду контроллер, достигает эффекта торможения, который равен применению автоматического тормоза, инициированному машинистом поезда.
12. Способ по п. 11, отличающийся тем, что заранее определенные критерии содержат по меньшей мере один критерий, выбранный из группы, состоящей из величины износа расходных деталей тормозной системы, количества результирующих внутрипоездных сил и величины последующего применения рабочего или автоматического тормоза без уменьшения тяги, которое может быть необходимо, и их комбинации.
13. Способ по п. 12, отличающийся тем, что контроллер использует формулу динамики поезда для выбора применения независимого тормоза или применения динамического тормоза, или их комбинации, которые достигнут эффекта торможения, который равен применению автоматического тормоза, инициированному машинистом поезда.
14. Способ по п. 13, дополнительно включающий этап автоматического восполнения недостатков от отказа динамического тормоза путем выдачи команды на эквивалентное применение независимого тормоза или применение автоматического тормоза, или их комбинации.
15. Система по п. 6, дополнительно включающая следующие этапы:
получение обратной связи о работе поезда после применения автоматического тормоза или применения динамического тормоза, или их комбинации, и
выполнение регулирования формулы динамики поезда, если поезд не ведет себя так, как ожидалось.
| US 5249125 A, 28.09.1993 | |||
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| US 5415465 A, 16.05.1995. | |||

