Изобретение относится к области измерительной и космической технике и может быть использовано для контроля герметичности космических аппаратов (КА) и является усовершенствованием известного устройства, описание которого приведено в патенте RU №2561235.
Известный датчик вакуума содержит корпус, коаксиальный цилиндрический анод, дисковые катоды, соединенные центральным стержнем, и магнитную систему, составленную из двух дисковых постоянных магнитов, которые вместе с коаксиальным цилиндрическим анодом и дисковыми катодами размещены в корпусе датчика с отверстиями, коаксиальный цилиндрический анод также выполнен с отверстиями, внутри коаксиального цилиндрического анода на дисковых катодах расположены дисковые постоянные магниты и каждая пара дисковых катодов и дисковых магнитов скреплена между собой и закреплена внутри цилиндрического анода диэлектрическими держателями (патент RU №2561235, G01L 21/34, от 27.08.2015 г, Бюл. №24).
Недостатком данного устройства является большой уровень помех, создаваемых магнитной системой датчика вакуума в окружающее его пространство.
Задача, решаемая изобретением, заключается в уменьшении помех, создаваемых магнитной системой датчика вакуума, а так же уменьшения влияния посторонних магнитных полей на показания датчика вакуума.
Ожидаемый технический результат достигается тем, что в датчике вакуума по патенту RU №2561235, содержащим корпус, коаксиальный цилиндрический анод, дисковые катоды, соединенные центральным стержнем, и магнитную систему, составленную из двух дисковых постоянных магнитов, которые вместе с коаксиальным цилиндрическим анодом и дисковыми катодами размещены в корпусе датчика с отверстиями, коаксиальный цилиндрический анод также выполнен с отверстиями, внутри коаксиального цилиндрического анода на дисковых катодах расположены дисковые постоянные магниты и каждая пара дисковых катодов и дисковых магнитов скреплена между собой и закреплена внутри цилиндрического анода диэлектрическими держателями, верхний и нижний диэлектрические держатели выполнены из фторопласта, нижний диэлектрический держатель с клеммами для подачи высокого напряжения установлен на основании, которое прикреплено к корпусу винтами, а воздушные полости между корпусом и верхним диэлектрическим держателем и основанием и нижним диэлектрическим держателем заполнены герметиком, корпус выполнен из немагнитного металла, в него введены верхняя и нижняя магнитомягкие насадки, установленные на внешней поверхности корпуса, верхняя насадка выполнена в виде цилиндрического колпака, установленного на верхнюю часть корпуса, нижняя насадка выполнена в виде кольца, установленного на нижнюю часть корпуса, высота верхней и нижней насадок установлена равной (1/4-1/3) высоты корпуса, кроме того, основание датчика вакуума так же выполнено из магнитомягкого металла.
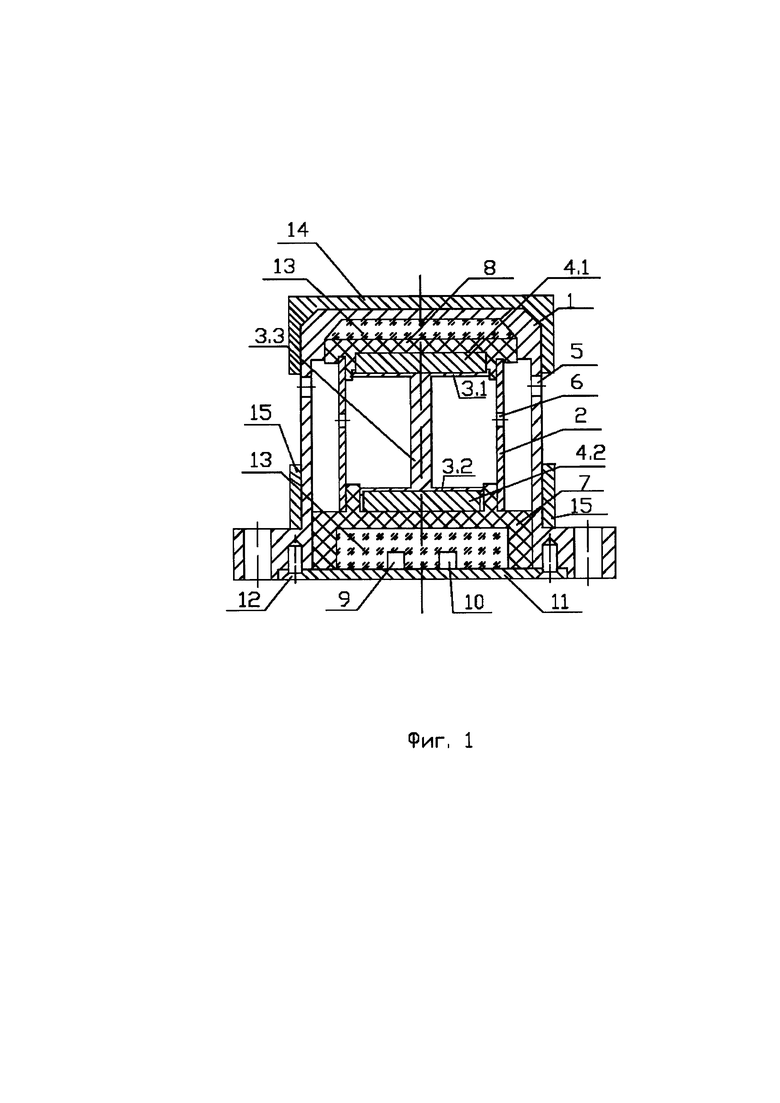
На фиг. 1 приведена конструкция датчика вакуума.
Датчик вакуума содержит корпус 1, коаксиальный цилиндрический анод 2, катод 3, состоящий из двух металлических дисков 3.1 и 3.2, соединенных между собой металлическим центральным стержнем 3.3, и магнитную систему 4, составленную из двух дисковых постоянных магнитов 4.1 и 4.2, которые вместе с коаксиальным цилиндрическим анодом 2 и катодом 3 размещены в корпусе 1. Корпус 1 и коаксиальный цилиндрический анод 2 выполнены с отверстиями 5 и 6 соответственно. Внутри коаксиального цилиндрического анода 2 на дисковых частях катода 3.1 и 3.2 расположены дисковые постоянные магниты 4.1 и 4.2 соответственно. Катод 3 вместе с дисковыми постоянными магнитами 4.1 и 4.2 зафиксированы внутри цилиндрического анода 2 диэлектрическими держателями 7 и 8. Нижний диэлектрический держатель 7 вместе с клеммами для подачи высокого напряжения 9 и 10 установлены на основании 11, которое прикреплено к корпусу 1 винтами 12. Воздушные полости между корпусом 1 и верхним диэлектрическим держателем 8 и основанием 11 и нижним диэлектрическим держателем 7 заполнены герметиком 13. Кроме того, диэлектрические держатели 7 и 8 выполнены из фторопласта. Корпус 1 выполнен из немагнитного металла (например, алюминия).
Верхняя 14 и нижняя 15 магнитомягкие насадки установлены на внешней поверхности корпуса 1, верхняя насадка 14 выполнена в виде цилиндрического колпака, установленного на верхнюю часть корпуса 1. Нижняя насадка 15 выполнена в виде кольца, установленного на нижнюю часть корпуса 1. Высота верхней 14 и нижней 15 насадок установлена равной (1/4-1/3) высоты корпуса 1.
Основание 11, верхняя 14 и нижняя 15 насадки выполнены из магнитомягкого металла, а анод 2 и катод 3 - из нержавеющей стали.
Принцип действия датчика вакуума основан на ионизационном разряде в скрещенных магнитном и электрическом полях. Заявленный датчик вакуума в условиях функционирования размещается на элементе поверхности МКС в вакуумной среде, с которой датчик связан через отверстия 5 в своем корпусе 1 и отверстия 6 в цилиндрическом корпусе анода 2. Внутри датчика вакуума в объеме между цилиндрическим анодом 2 и катодом 3 с наложенными на дисковые части катода 3.1 и 3.2 постоянные магниты 4.1 и 4.2 создается постоянное однородное магнитное поле, поперечное радиальному электрическому полю внутри цилиндрического анода 2, которое возбуждается при подаче на анод 2 высокого (~2,5 кВ) напряжения через высоковольтные клеммы 9 и 10. Сильное электрическое поле вырывает из катода 3 электроны. Индукция магнитного поля Вм устанавливается больше критического значения, препятствующего непосредственному попаданию электрона на анод, соответствующего значению Вм.крит<Вм=0,1 Тл. Поэтому электроны двигаются к аноду 2 не прямолинейно, а по спирали, благодаря чему увеличивается длина их пробега в межэлектродном пространстве. Большая часть электронов на своем пути сталкивается с нейтральными молекулами газа. При этом газ ионизируется и по цепи анод 2 катод 3 протекает ионизационный ток разряда. Величина ионизационного тока прямо пропорциональна количеству молекул в разрядном объеме между анодом 2 и катодом 3, а, следовательно, и величине давления Р. Таким образом, измеряя величину разрядного тока датчика вакуума, определяют давление среды окружающей его.
Как известно, в диапазоне давлений 0,3-1,0 мм рт.ст. согласно закону Пашена находится минимум напряжения, необходимого для возникновения разрядного процесса. Он составляет ~300-400 В. Поэтому для исключения возможности возникновения «паразитного» разрядного процесса между клеммами 9 и 10 для подачи высокого напряжения нижняя полость между основанием и нижним диэлектрическим держателем с клеммами для подачи высокого напряжения 9 и 10 заполнена герметиком (компаунд Виксинт ПКФ-68, ТУ38.103508-81). Электрическая прочность этого компаунда составляет 15 кВ/мм и значительно превышает напряжение пробоя воздушного промежутка (2 кВ/мм при нормальном давлении). Этим же герметиком заполнена и верхняя полость, образованная между верхним диэлектрическим держателем 8 и корпусом 1. Это позволяет исключить зазоры между конструктивными элементами датчика вакуума и, за счет эластичности герметика, значительно повысить вибростойкость датчика вакуума. Предварительные испытания датчика вакуума показали, что герметик (Виксинт ПКФ-68) не влияет на метрологические характеристики датчика в требуемом диапазоне измерения давлений Р=10-2-10-6 мм рт.ст., при этом значительно повышает его вибростойкость.
Как уже упоминалось выше, индукция магнитного поля, создаваемого постоянными магнитами 4.1 и 4.2 в объеме между цилиндрическим анодом 2 и катодом 3, имеет величину порядка 0,1 Тл. Однако, эти же постоянные магниты 4.1 и 4.2 создают постоянное магнитное поле и за пределами корпуса 1 и основания 11 датчика вакуума, что может быть крайне нежелательным для работы другой аппаратуры, находящейся рядом с датчиком вакуума.
Введение в датчик вакуума накладок 14 и 15 и выполнение их и его основания 11 из магнитомягкого металла (пермаллоя) позволяет, во-первых, локализовать силовые линии постоянного магнитного поля практически в пределах корпуса датчика и тем самым значительно уменьшить влияние постоянного магнитного поля на работу других приборов, находящихся рядом с датчиком вакуума, во-вторых, повысить плотность и однородность силовых магнитных линий (напряженность и однородность магнитного поля) в рабочей зоне датчика вакуума, что так же улучшает его метрологические характеристики.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДАТЧИК ВАКУУМА | 2014 |
|
RU2561235C1 |
| ДАТЧИК ВАКУУМА | 2010 |
|
RU2427813C1 |
| УСТРОЙСТВО ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЯ ВАКУУМНО-ДУГОВЫМ ИСПАРЕНИЕМ | 2018 |
|
RU2685828C1 |
| ВЫСОКОВОЛЬТНЫЙ ИОННЫЙ ДВИГАТЕЛЬ ДЛЯ КОСМИЧЕСКИХ АППАРАТОВ | 2008 |
|
RU2411393C2 |
| Магниторазрядный насос | 1980 |
|
SU940263A1 |
| Ионно-геттерный насос | 1983 |
|
SU1102408A1 |
| Магнетронная распылительная головка | 2017 |
|
RU2656318C1 |
| Аппарат для электрохимической обработки жидкости | 1989 |
|
SU1745687A1 |
| УСТРОЙСТВО ДЛЯ НАПЫЛЕНИЯ ПЛЕНОК В ПЛАЗМЕ | 1992 |
|
RU2019576C1 |
| МАГНЕТРОННАЯ РАСПЫЛИТЕЛЬНАЯ СИСТЕМА | 1996 |
|
RU2107971C1 |
Использование: для контроля герметичности космических аппаратов. Сущность изобретения заключается в том, что датчик вакуума содержит корпус, коаксиальный цилиндрический анод, дисковые катоды, соединенные центральным стержнем, и магнитную систему, составленную из двух дисковых постоянных магнитов, которые вместе с коаксиальным цилиндрическим анодом и дисковыми катодами размещены в корпусе датчика с отверстиями, коаксиальный цилиндрический анод также выполнен с отверстиями, внутри коаксиального цилиндрического анода на дисковых катодах расположены дисковые постоянные магниты, и каждая пара дисковых катодов и дисковых магнитов скреплена между собой и закреплена внутри цилиндрического анода диэлектрическими держателями, верхний и нижний диэлектрические держатели выполнены из фторопласта, нижний диэлектрический держатель с клеммами для подачи высокого напряжения установлен на основании, которое прикреплено к корпусу винтами, а воздушные полости между корпусом и верхним диэлектрическим держателем и основанием и нижним диэлектрическим держателем заполнены герметиком, корпус выполнен из немагнитного металла, дополнительно в него введены верхняя и нижняя магнитомягкие насадки, установленные на внешней поверхности корпуса, верхняя насадка выполнена в виде цилиндрического колпака, установленного на верхнюю часть корпуса, нижняя насадка выполнена в виде кольца, установленного на нижнюю часть корпуса, высота верхней и нижней насадок установлена равной (1/4-1/3) высоты корпуса, кроме того, основание датчика вакуума также выполнено из магнитомягкого металла. Технический результат: обеспечение возможности уменьшения помех, уменьшения влияния посторонних магнитных полей на показания датчика вакуума. 1 ил.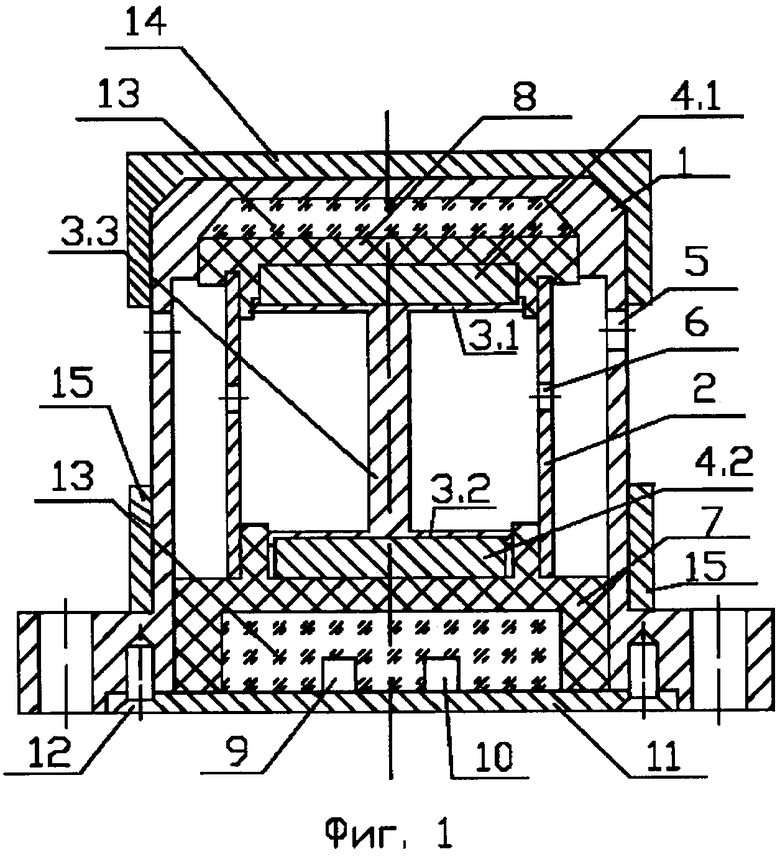
Датчик вакуума, содержащий корпус, коаксиальный цилиндрический анод, дисковые катоды, соединенные центральным стержнем, и магнитную систему, составленную из двух дисковых постоянных магнитов, которые вместе с коаксиальным цилиндрическим анодом и дисковыми катодами размещены в корпусе датчика с отверстиями, коаксиальный цилиндрический анод также выполнен с отверстиями, внутри коаксиального цилиндрического анода на дисковых катодах расположены дисковые постоянные магниты, и каждая пара дисковых катодов и дисковых магнитов скреплена между собой и закреплена внутри цилиндрического анода диэлектрическими держателями, верхний и нижний диэлектрические держатели выполнены из фторопласта, нижний диэлектрический держатель с клеммами для подачи высокого напряжения установлен на основании, которое прикреплено к корпусу винтами, а воздушные полости между корпусом и верхним диэлектрическим держателем и основанием и нижним диэлектрическим держателем заполнены герметиком, корпус выполнен из немагнитного металла, отличающийся тем, что в него введены верхняя и нижняя магнитомягкие насадки, установленные на внешней поверхности корпуса, верхняя насадка выполнена в виде цилиндрического колпака, установленного на верхнюю часть корпуса, нижняя насадка выполнена в виде кольца, установленного на нижнюю часть корпуса, высота верхней и нижней насадок установлена равной (1/4-1/3) высоты корпуса, кроме того, основание датчика вакуума также выполнено из магнитомягкого металла.
| ДАТЧИК ВАКУУМА | 2014 |
|
RU2561235C1 |
| ДАТЧИК ВАКУУМА | 2010 |
|
RU2427813C1 |
| EP 1039285 A2, 27.09.2000 | |||
| US 20160025587 A1, 28.01.2016 | |||
| JP 9005198 A, 10.01.1997. | |||

