Область техники
Предлагаемое изобретение относится к локальному позиционированию, а именно к способам поиска и регистрации меток в системе локального позиционирования.
Описание предшествующего уровня техники
Наряду с широко известными спутниковыми системами глобального позиционирования существует также потребность в системах локального позиционирования, которые используются для решения задач нахождения местоположения различных предметов/субъектов с высокой точностью, как в помещениях, так и вне помещений.
На сегодняшний день существует множество видов систем локального позиционирования, из которых одними из наиболее распространенных являются системы с использованием пассивных меток RFID (радиочастотная идентификация) и системы с использованием активных меток со сверхширокополосными СВЧ сигналами.
Например, из уровня техники, см. документ US 20100109847, опубликованный 06.05.2010, известна система опроса RFID меток, в которой различные управляющие кадры используются для связи с известными и новыми метками, имеющимися в заданной области. Недостатком предлагаемого решения является наложение сигналов от нескольких меток, которые откликнулись одновременно, причем, если откликается большое количество меток, то предлагаемая система не способна обнаружить единственную искомую метку.
Также из уровня техники, см. документ US 5266925, опубликованный 30.11.1993, известен способ опроса электронных меток. Имеется множество меток, каждая метка имеет собственные идентификационные данные, нахождение идентификационных данных метки производится методом половинного деления, при котором система опрашивает группу меток, указав диапазон идентификационных данных. Такая система защищена от наложения сигналов отклика меток. Однако, предлагаемый способ обнаружения метки с искомыми идентификационными данными является очень медленным.
В известных системах идентификации меток, использующих простые протоколы (например, RFID), как правило, система посылает команду «опросить метки» без указания конкретных ID (идентификационных данных) меток. Поэтому все метки, которые приняли команду «опросить метки», пытаются одновременно ответить на команду и сообщить свои идентификационные данные. Это приводит к наложению сигналов и затрудняет распознавание данных. Но при выполнении адресного поиска (по известному ID) эта проблема уже решена и не мешает точному позиционированию.
Известные протоколы передачи данных, при помощи которых можно было бы проводить поиск меток, такие как Bluetooth, Wi-Fi, технология, использующая сверхширокополосные сигналы (UWB) на примере Pixie, имеют следующие недостатки:
- высокое энергопотребление самой метки;
- необходимость использования мощного процессора относительно мощный процессор необходим метке для кодирования и декодирования сложных сигналов, реализации разделения сигналов; для меток необходимость в мощном процессоре означает заметное повышение стоимости и повышение энергопотребления, увеличение габаритов, добавление элементов питания;
- необходимость периодической ретрансляции сигналов, поскольку известные из уровня техники протоколы предполагают работу метки от батарейки и необходимость режима «сна» с периодическими «пробуждениями». Большую часть времени такая метка находится в режиме «сна» для экономии энергии и активируется через заданные интервалы на короткое время по внутреннему таймеру. Во время режима «сна» метка не принимает сигналов и ее невозможно опросить, во время периода активности метка должна отправить сигнал (пакет), чтобы поддерживать связь с другими устройствами в системе, даже если в данный момент в этом не было необходимости (не было запроса от других устройств в системе). То есть вне зависимости от того, нужна ли в данный момент новая информация о данной метке, метка вынуждена отправлять информацию с заданной частотой и терять заряд батарейки.
По сравнению с известным уровнем техники предлагаемое изобретение позволяет уменьшить потребляемую мощность в метке и в позиционирующем узле и упростить задачу, решаемую процессором позиционирующего узла, то есть уменьшить требования, предъявляемые к процессору, а также предлагаемое изобретение позволяет исключить наложение друг на друга сигналов, полученных от множества меток.
Сущность изобретения
Предлагается способ регистрации метки в системе локального позиционирования, содержащий следующие этапы. Включают позиционирующий узел в режиме ближнего поля, при котором мощность позиционирующего узла снижается, для уменьшения расстояния, на которое могут распространяться поисковые пакеты позиционирующего узла. Располагают регистрируемую метку на расстоянии от позиционирующего узла, не превышающем расстояния, на которое могут распространяться пакеты позиционирующего узла в режиме ближнего поля. Позиционирующий узел отсылает пакет для добавления метки в систему, содержащий идентификационные данные системы локального позиционирования. Метка сохраняет идентификационные данные системы локального позиционирования. Метка отсылает ответный пакет, модулированный своими идентификационными данными, в позиционирующий узел. Позиционирующий узел запоминает идентификационные данные метки и присваивает регистрируемой метке статус «зарегистрирована». Способ может дополнительно содержать этап, на котором позиционирующий узел отправляет на смартфон пользователя статус «зарегистрирована» для указанной метки.
Также предлагается способ поиска метки, зарегистрированной в системе локального позиционирования, который содержит следующие этапы. Посылают команду по меньшей мере одному позиционирующему узлу на поиск зарегистрированной метки. Включают по меньшей мере один позиционирующий узел в режим дальнего поля, в котором мощность позиционирующего узла повышается до максимально возможной, для достижения максимального расстояния, на которое могут распространяться поисковые пакеты позиционирующего узла. По меньшей мере один позиционирующий узел отправляет адресные поисковые пакеты, модулированные идентификационными данными искомой зарегистрированной метки, по всем направлениям системы локального позиционирования. Каждая из зарегистрированных меток, находящихся в системе локального позиционирования: принимает адресный поисковый пакет, модулированный идентификационными данными искомой зарегистрированной метки, выделяет идентификационные данные из адресного поискового пакета, определяет, совпадают ли выделенные идентификационные данные с ее идентификационными данными, отправляет в пространство позиционирующий импульс при определении совпадения выделенных идентификационных данных с ее идентификационными данными. По меньшей мере один позиционирующий узел принимает позиционирующий импульс от метки и присваивает метке статус «найдена». Причем если идентификационные данные зарегистрированной метки не совпадают с идентификационными данными искомой зарегистрированной метки, которыми модулирован адресный поисковый пакет, зарегистрированная метка не отправляет позиционирующий импульс. Причем один из по меньшей мере одного позиционирующего узла является ведущим позиционирующим узлом. Если позиционирующих узлов больше, чем один, остальные позиционирующие узлы являются подчиненными позиционирующими узлами, причем подчиненные позиционирующие узлы получают команды от ведущего узла на отсылку адресных поисковых пакетов в системе локального позиционирования.
Также предлагается способ поиска идентификационных данных по меньшей мере одной искомой метки, не зарегистрированной в системе локального позиционирования, причем способ содержит этапы, на которых:
а) по меньшей мере один позиционирующий узел получает команду от пользователя на поиск по меньшей мере одной искомой метки, имеющей неизвестные идентификационные данные и не зарегистрированной в системе локального позиционирования;
б) по меньшей мере один позиционирующий узел посылает по меньшей мере один широковещательный поисковый пакет, модулированный диапазоном идентификационных данных, содержащим идентификационные данные всех существующих меток, и идентификационными данными системы;
в) по меньшей мере одна незарегистрированная метка, находящаяся в системе:
принимает широковещательный поисковый пакет,
выделяет диапазон идентификационных данных из широковещательного поискового пакета,
определяет совпадают ли идентификационные данные, которыми модулирован широковещательный поисковый пакет, с ее идентификационными данными,
отправляет в пространство системы локального позиционирования позиционирующий импульс при определении совпадения принятых идентификационных данных с ее идентификационными данными,
причем если идентификационные данные по меньшей мере одной незарегистрированной метки не совпадают с идентификационными данными, которыми модулирован широковещательный поисковый пакет, незарегистрированная метка не отправляет позиционирующий импульс в ответ на широковещательный поисковый пакет;
г) если по меньшей мере один позиционирующий узел получает ответ в виде по меньшей мере одного позиционирующего импульса в заданном диапазоне идентификационных данных, позиционирующий узел делит диапазон идентификационных данных меток пополам и посылает широковещательный поисковый пакет, модулированный диапазоном идентификационных данных сначала из одной половины, а потом из другой половины,
д) если в одной из упомянутых половин получен ответ в виде по меньшей мере одного позиционирующего импульса, позиционирующий узел повторяет этап (г) для этой половины диапазона, причем
е) этапы (г) и (д) осуществляются до тех пор, пока не останется только идентификационные данные по меньшей мере одной метки, эти идентификационные данные и являются идентификационными данными по меньшей мере одной искомой метки, не зарегистрированной в системе локального позиционирования.
Причем каждая из зарегистрированных в системе меток принимает по меньшей мере один широковещательный поисковый пакет и, выделив идентификационные данные системы из широковещательного поискового пакета, совпадающие с идентификационными данными системы, сохраненными в памяти зарегистрированной метки, не отвечает на такой широковещательный поисковый пакет. Причем один из по меньшей мере одного позиционирующего узла является ведущим позиционирующим узлом, и если позиционирующих узлов больше, чем один, остальные позиционирующие узлы являются подчиненными позиционирующими узлами, причем подчиненные позиционирующие узлы получают команды от ведущего узла на отсылку широковещательных поисковых пакетов в системе локального позиционирования. Способ дополнительно содержит этап, на котором по меньшей мере один позиционирующий узел делит пространство системы локального позиционирования на сектора, в каждом из секторов осуществляются этапы (б-е), причем если по меньшей мере один позиционирующий узел не получает позиционирующий импульс в одном из секторов, этот по меньшей мере один позиционирующий узел переключается на поиск в следующем секторе. Причем по меньшей мере один широковещательный поисковый пакет дополнительно модулирован идентификационными данными одной или более других систем локального позиционирования.
Краткое описание чертежей
Вышеописанные и другие признаки и преимущества настоящего изобретения поясняются в последующем описании, иллюстрируемом чертежами, на которых представлено следующее:
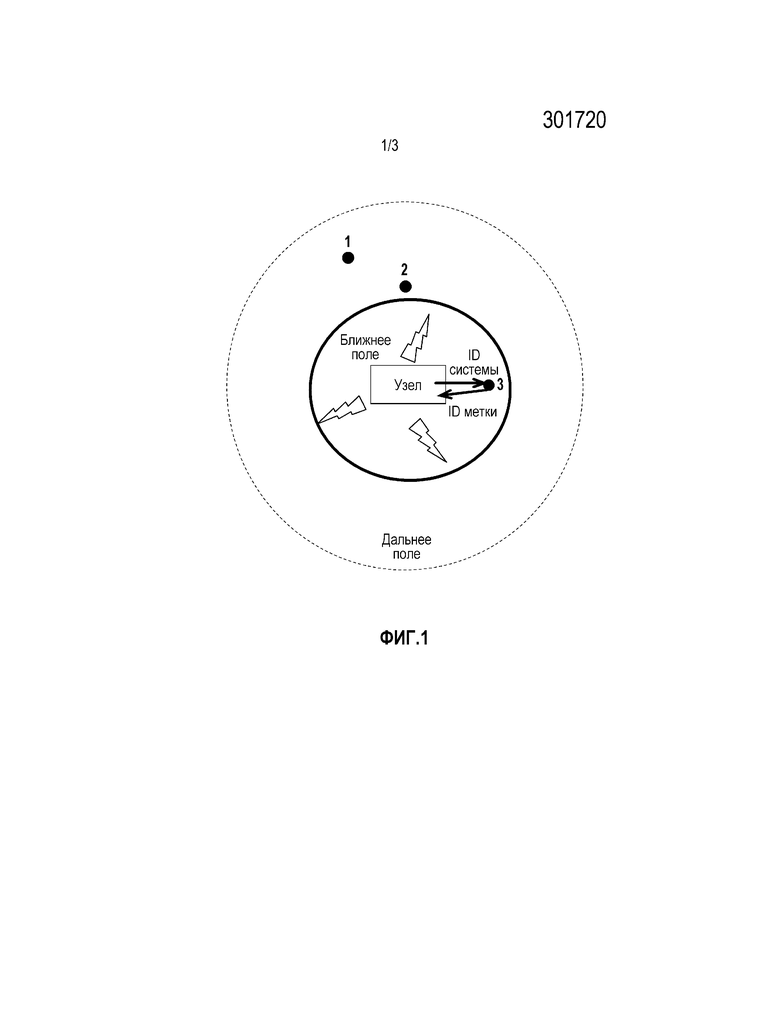
Фиг. 1 схематично показана предлагаемая система локального позиционирования и проиллюстрирована регистрация новой метки в системе локального позиционирования;
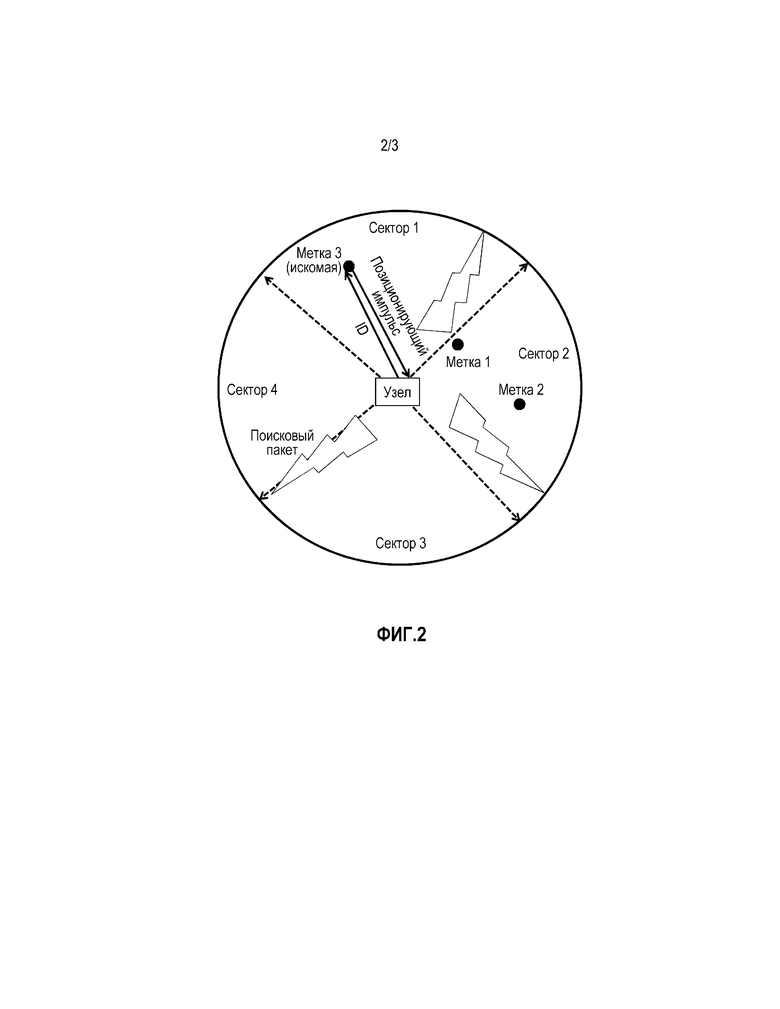
Фиг. 2 схематично показана работа системы локального позиционирования;
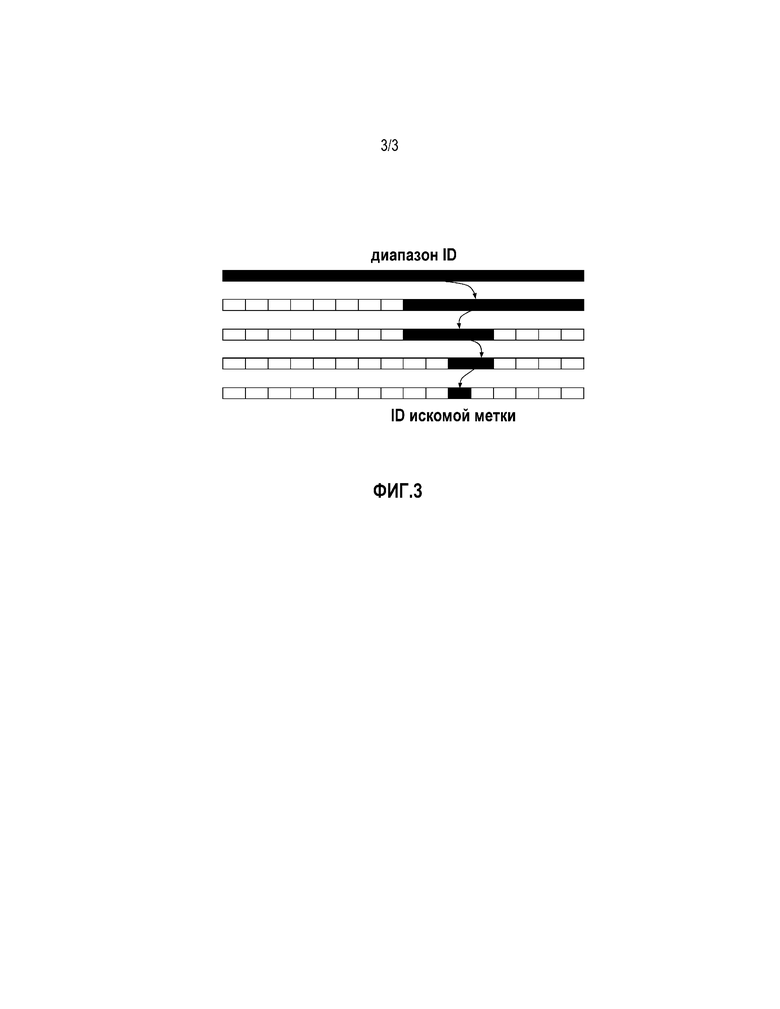
Фиг. 3 проиллюстрирован способ бисекции диапазона ID для нахождения метки, незарегистрированной в системе локального позиционирования.
Подробное описание изобретения
Предлагаемое изобретение позволяет регистрировать новые метки в системе локального позиционирования, а также проводить определение идентификационных данных и определять присутствие в системе незарегистрированных меток без вмешательства в процесс поиска уже зарегистрированных в системе меток. Необходимо отметить, что данное изобретение не касается нахождения точного местоположения меток.
Пользователь прикрепляет к желаемым предметам небольшие гибкие метки, способные работать без батарей, каждая из которых содержит свою идентификационную информацию.
Для работы системы локального позиционирования пользователю необходимо зарегистрировать на своем персональном устройстве (например, на смартфоне) идентификационные данные метки и предмет/субъект, к которому метка прикреплена, то есть пользователь, используя необходимое количество меток, прикрепляет их к выбранным предметам и регистрирует на персональном устройстве идентификационные данные каждой метки и предмет, к которому эта метка прикреплена, чтобы при получении от позиционирующего узла информации о нахождении метки пользователь мог по идентификационным данным найденной метки определить найденный предмет. Информацию о метке и соответствующем ей предмете возможно регистрировать в любом удобном для пользователя виде, например, в форме таблицы соответствия предмета и идентификационной информации метки.
С помощью предлагаемого изобретения возможно производить поиск идентификационных данных метки в системе локального позиционирования, в которой данная метка не зарегистрирована. Если человек потерял в помещении вещь (например, бумажник) со встроенной меткой, а идентификационные данные метки неизвестны, при помощи предлагаемого изобретения можно определить идентификационные данные потерянной метки для дальнейшего определения ее точного местоположения.
Ниже приводятся основные термины, используемые при описании предлагаемого изобретения.
Система локального позиционирования содержит позиционирующие узлы, выполненные с возможностью обнаружения меток и их идентификационных данных. Система локального позиционирования представляет собой совокупность позиционирующих узлов, располагающихся в фиксированных местоположениях, и меток, располагающихся произвольно в радиусе действия позиционирующих узлов, причем система определяется пространством (пространство системы), в котором может распространяться поисковый пакет, отправленный позиционирующим узлом.
Позиционирующие узлы представляют собой приемо-передатчики, имеющие фиксированные местоположения, выбираемые пользователем, и выполненные с возможностью передачи адресных поисковых пакетов и широковещательных поисковых пакетов, модулированных идентификационными данными, и с возможностью приема позиционирующих импульсов от по меньшей мере одной метки, обработки позиционирующих импульсов и передачи на устройство пользователя в виде информации о месторасположении метки, которую пользователь искал. Позиционирующий узел включает в себя передатчик поискового пакета, микроконтроллер, позиционирующий приемник, интерфейс для связи с устройством пользователя, антенну. Для определения идентификационных данных метки и ее регистрации в системе локального позиционирования достаточно одного позиционирующего узла.
Широковещательный поисковый пакет отсылается позиционирующим узлом в пространство системы, широковещательный поисковый пакет содержит идентификационные данные системы и диапазон идентификационных данных опрашиваемых меток, причем широковещательный поисковый пакет служит для определения идентификационных данных меток, не зарегистрированных в данной системе, но находящихся в радиусе действия позиционирующего узла. Опционально, широковещательный поисковый пакет может содержать любые необходимые данные.
Адресный поисковый пакет отсылается позиционирующим узлом при поиске метки, зарегистрированной в системе локального позиционирования, и содержит идентификационные данные конкретной метки, положение которой необходимо найти.
Пакет, предназначенный для добавления метки в систему локального позиционирования и содержащий идентификационные данные системы локального позиционирования, отсылается позиционирующим узлом регистрируемой метке для сохранения идентификационных данных системы локального позиционирования в памяти регистрируемой метки. При получении этого пакета регистрируемая метка сохраняет идентификационные данные системы локального позиционирования во внутренней памяти своего микроконтроллера.
Пакет для исключения метки из системы локального позиционирования отсылается позиционирующим узлом для оповещения метки об удалении из системы локального позиционирования, в которой метка была зарегистрирована.
Метка представляет собой небольшое гибкое устройство, которое можно прикрепить к любому предмету. В настоящем изобретении возможно, наряду с метками, содержащими батарейку, использовать метки, не содержащие батарейку. Такие метки, принимая поисковый пакет, могут накапливать энергию принятого поискового пакета в качестве энергии зарядки. Метка может принимать поисковые пакеты (как адресные, так и широковещательные), содержащие идентификационные данные, выделять идентификационные данные из поискового пакета, определять, совпадают ли идентификационные данные с ее идентификационными данными, отправлять в пространство позиционирующий импульс при определении совпадения принятых идентификационных данных с ее идентификационными данными. При работе в непосредственной близости от позиционирующего узла (при работе в ближнем поле), когда есть возможность постоянно подпитываться от позиционирующего узла, метка способна формировать пакет, содержащий свои идентификационные данные, и отсылать такой пакет позиционирующему узлу, рядом с которым метка находится.
Позиционирующий импульс отсылается меткой. Метка отправляет один и тот же тип импульса в ответ на адресный поисковый пакет и широковещательный поисковый пакет. В случае широковещательного поискового пакета наличие/отсутствие позиционирующего импульса от метки является ответом «да/нет», соответственно, на вопрос «есть ли метка с идентификационным номером из заданного диапазона в зоне действия позиционирующего узла(ов)». С помощью адресного поискового пакета позиционирующие узлы также могут вычислять координаты точки, из которой был отправлен позиционирующий импульс, в этом случае используются по меньшей мере три позиционирующих узла.
Идентификационные данные (ID) представляют собой индивидуальный номер метки, который присваивается каждой метке при изготовлении, тем самым исключается существование меток с одинаковыми ID. Также свои ID имеет каждая система. Можно создать любые желаемые ID системы при развертывании (установке пользователем) или изготовлении системы локального позиционирования. Причем совпадения ID систем локального позиционирования допускаются, но вероятность совпадения должна быть низкой. Можно создавать случайные идентификаторы достаточной длины при развертывании системы - тогда практическая вероятность совпадения будет очень мала. ID системы хранятся в позиционирующем узле. В дальнейшем все устройства, зарегистрированные в системе локального позиционирования, сохраняют идентификационный номер системы локального позиционирования.
Система локального позиционирования содержит ведущий узел и подчиненные узлы. Отличие ведущего узла системы от подчиненных в том, что он управляет работой всей системы, а также реализует интерфейс работы с пользователем - прием всех команд от пользователя и отсылку соответствующих результатов пользователю. Ведущий узел связан с каждым из подчиненных узлов по проводной или беспроводной связи. Ведущий узел выдает управляющие команды связанным с ним подчиненным узлам. С помощью подчиненных узлов ведущий узел определяет местоположение искомой метки.
При регистрации метки в системе локального позиционирования ведущий узел запоминает идентификационные данные регистрируемой метки, а метка сохраняет в своей памяти идентификационные данные системы, в которой данная метка зарегистрирована. Метка, зарегистрированная в системе локального позиционирования, может принимать адресный поисковый пакет, модулированный идентификационными данными метки, от позиционирующего узла. Причем зарегистрированная метка может отвечать на адресные и широковещательные поисковые пакеты от других систем локального позиционирования.
При этом метка, зарегистрированная в системе локального позиционирования, и имеющая наряду с собственными идентификационными данными идентификационные данные этой системы, не отвечает на широковещательный поисковый пакет позиционирующего узла, модулированный идентификационными данными системы, в которой метка зарегистрирована. Таким образом, регистрация в системе локального позиционирования служит для ограничения числа ответов на широковещательные поисковые пакеты и упрощения поиска меток, не зарегистрированных в данной системе.
При получении широковещательного поискового пакета метка сверяет сохраненный при регистрации ID системы и ID опрашивающей системы. Если они совпадают, метка не отвечает, т.к. уже зарегистрирована в этой системе, и будет ждать только адресный поисковый пакет, чтобы не усложнять поиск новых меток. Если метка не зарегистрирована в системе или ID опрашивающей системы не совпадает с ID системы, в которой метка зарегистрирована, метка отвечает и участвует в общем поиске.
Для удобства использования позиционирующий узел может быть связан с устройством пользователя, например, смартфоном, по беспроводной сети, например, Bluetooth, при этом пользователь может управлять работой позиционирующего узла с помощью своего устройства.
На фигуре 1 схематически показана предлагаемая система локального позиционирования и проиллюстрирована регистрация новой метки (3) в системе локального позиционирования в режиме ближнего поля.
В процессе регистрации новой метки в системе локального позиционирования позиционирующий узел переходит в режим ближнего поля, при котором мощность позиционирующего узла снижается, для уменьшения расстояния, на которое могут распространяться пакеты позиционирующего узла. Чтобы зарегистрировать метку в системе локального позиционирования, пользователь, например, с помощью смартфона, включает ведущий или любой подчиненный (в этом режиме может работать любой из узлов, выбранный пользователем) позиционирующий узел в режим «ближнего поля».
В режиме ближнего поля снижается мощность позиционирующего узла для уменьшения расстояния, на которое могут распространяться пакеты позиционирующего узла, то есть на пакеты для добавления метки в систему, направленные от позиционирующего узла в таком режиме работы, смогут отвечать только метки, находящиеся в непосредственной близости от позиционирующего узла, поэтому остальные метки (например, (1) и (2)) не будут отвечать на пакеты для добавления метки в систему, передаваемые позиционирующим узлом регистрируемой метке.
Как показано на фигуре 1, пользователь располагает метку (3) в ближнем поле, когда позиционирующий узел работает в режиме ближнего поля, позиционирующий узел посылает пакет для добавления метки (3) в систему. При получении этого пакета регистрируемая метка (3) сохраняет идентификационные данные системы локального позиционирования во внутренней памяти своего микроконтроллера. В ответ метка (3) посылает ответный пакет, модулированный своими идентификационными данными в узел. Узел запоминает идентификационные данные метки и отправляет на смартфон пользователя статус «зарегистрирована» для этой метки.
Необходимо отметить, что при регистрации в ближнем поле метка может отвечать полноценным пакетом, содержащим ID метки, в отличие от работы в дальнем поле, когда метка может отправлять только позиционирующий импульс.
Регистрация метки может происходить и без включения режима ближнего поля для позиционирующего узла, однако в режиме ближнего поля регистрация метки происходит быстрее, поскольку на пакет добавления метки в систему отвечают только метки, располагающиеся в непосредственной близости от позиционирующего узла. Подготовка и отправка пакета данных вместо короткого импульса требует значительно больших затрат энергии, поэтому может осуществляться только при наличии надежного источника питания у метки - либо батарейки, либо близкого расположения до заряжающего устройства. При работе в ближнем поле предполагается, что метка неподвижна и находится близко к позиционирующему узлу и источнику энергии в нем, поэтому она получает достаточно энергии для непрерывной работы в течение относительно длительного периода времени, достаточного для подготовки и отправки целого пакета, модулированного данными. Кроме того, при регистрации пользователь должен подносить к позиционирующему узлу только одну метку и поэтому не должно возникать проблемы с наложением сигналов от нескольких меток. Итак, для успешной регистрации метки в системе локального позиционирования необходимо сочетание следующих факторов:
- близкое расположение метки к позиционирующему узлу для надежного непрерывного получения энергии меткой,
- наличие только одной метки в зоне действия ближнего поля, во избежание наложения сигналов от нескольких меток.
Процедура исключения метки из системы локального позиционирования производится только в ближнем поле.
Пользователь располагает метку в ближнем поле, когда позиционирующий узел включен в режим ближнего поля, позиционирующий узел посылает пакет для исключения метки из системы. При получении пакета для исключения метки из системы зарегистрированная метка удаляет идентификационные данные системы локального позиционирования из внутренней памяти микроконтроллера. В ответ метка посылает узлу системы ответный пакет об успешном удалении из системы локального позиционирования. Узел проверяет пакет, полученный от метки, и отправляет на смартфон пользователя статус «исключена» для этой метки.
На фигуре 2 показана работа системы локального позиционирования в режиме дальнего поля.
Пользователь, с помощью гаджета посылает команду ведущему позиционирующему узлу на поиск зарегистрированной метки 3. На всех позиционирующих узлах системы локального позиционирования по команде ведущего узла включается режим дальнего поля, в котором мощность позиционирующего узла повышается до максимально возможной, для достижения максимального расстояния, на которое могут распространяться пакеты позиционирующих узлов. При этом пакеты позиционирующих узлов в таком режиме работы могут достичь всех меток, находящихся в зоне действия данной системы локального позиционирования.
Все позиционирующие узлы отправляют одинаковые адресные поисковые пакеты, модулированные идентификационными данными искомой зарегистрированной метки. При поиске зарегистрированной метки адресный поисковый пакет, отсылаемый позиционирующим узлом, должен быть модулирован только идентификационными данными искомой зарегистрированной метки.
Каждая из зарегистрированных меток, находящихся в системе локального позиционирования, принимая адресный поисковый пакет, модулированный идентификационными данными метки, положение которой необходимо найти:
выделяет идентификационные данные из адресного поискового пакета,
определяет, совпадают ли идентификационные данные с ее идентификационными данными,
отправляет в пространство позиционирующий импульс при определении совпадения принятых идентификационных данных с ее идентификационными данными,
позиционирующий узел принимает позиционирующий импульс от метки и присваивает метке статус «найдена»,
причем если идентификационные данные метки не совпадают с идентификационными данными, которыми модулирован адресный поисковый пакет, метка не отправляет никаких импульсов в ответ.
Каждый позиционирующий узел может посылать широковещательный поисковый пакет, модулированный диапазоном идентификационных данных группы меток, которые необходимо найти, а также идентификационными данными системы локального позиционирования, которой принадлежит данный позиционирующий узел.
При этом метка, зарегистрированная в данной системе локального позиционирования, не будет отвечать на такой широковещательный поисковый пакет, поскольку при его получении распознает, что идентификационные данные системы в данном пакете совпадают с идентификационными данными системы, хранящейся в ее памяти.
Каждая не зарегистрированная в данной системе метка, принимая широковещательный поисковый пакет, выделяет диапазон идентификационных данных группы меток, находит идентификационные данные, совпадающие с ее идентификационными данными, отправляет позиционирующий импульс, причем, если идентификационные данные метки не совпадают ни с одними из идентификационных данных из диапазона, которыми модулирован широковещательный поисковый пакет, метка не отправляет позиционирующий импульс.
В широковещательный поисковый пакет могут быть включены идентификационные данные нескольких разных систем. Тогда на такой широковещательный поисковый пакет будут отвечать только метки, идентификационные данные системы которых не совпадает ни с одним из указанных в пакете. Это полезно в том случае, если система локального позиционирования знает о существовании соседних систем локального позиционирования, и хочет найти метки, которые не зарегистрированы ни в одной из этих систем, но находятся в их пространствах.
При таком избирательном позиционировании, когда на широковещательный поисковый пакет отвечают только незарегистрированные метки, уменьшается потребление энергии позиционирующим узлом, по сравнению с решениями, известными из уровня техники, также исключается возможность возникновения наложения позиционирующих импульсов от нескольких меток и уменьшается время поиска, время не тратится на перебор зарегистрированных меток, поскольку они не отвечают.
Как показано на фиг. 2 при поиске незарегистрированной метки (3) каждый из позиционирующих узлов может опрашивать только часть пространства, которое определяется системой локального позиционирования. Пространство может условно делиться каждым из позиционирующих узлов, например, на четыре сектора - сектор 1, сектор 2, сектор 3, сектор 4 - как показано пунктирными стрелками, или на любое количество секторов. Позиционирующий узел опрашивает последовательно каждый сектор для того, чтобы уменьшить количество незарегистрированных меток, которые могут ответить на поисковый пакет, до тех пор, пока не найдется искомая метка. Все узлы системы могут проводить поиск, например, поочередно.
Если необходимо найти метку, которая не зарегистрирована в данной системе локального позиционирования, и имеет неизвестные идентификационные данные метки, используется следующий способ поиска.
Все позиционирующие узлы посылают одинаковый широковещательный поисковый пакет поочередно, под управлением ведущего узла, т.е. каждый подчиненный узел посылает широковещательный поисковый пакет только по команде ведущего узла, причем ведущий узел задает диапазон ID подчиненному узлу и все остальные параметры для широковещательного поискового пакета. Алгоритм работы ведущего позиционирующего узла с подчиненным позиционирующим узлом при таком поочередном опросе может быть следующим: сначала ведущий позиционирующий узел сам отправляет широковещательный поисковый пакет, затем ведущий позиционирующий узел поочередно дает команду каждому из подчиненных позиционирующих узлов на отправку такого же широковещательного поискового пакета. Каждый из позиционирующих узлов отсылает широковещательный поисковый пакет во все сектора поочередно в пределах данной системы локального позиционирования, причем деление пространства на сектора производится каждым узлом независимо от остальных узлов. Причем широковещательный поисковый пакет модулирован диапазоном идентификационных данных меток, в который включены все известные идентификационные данные всех изготовленных меток и идентификационными данными системы локального позиционирования (далее СЛК), в которой производится поиск. На такой широковещательный поисковый пакет метки, зарегистрированные в СЛК, отвечать не будут, поскольку в широковещательном поисковом пакете будут содержаться идентификационные данные СЛК, в которой эти метки зарегистрированы.
Для наглядности на Фиг. 3 проиллюстрирован способ бисекции диапазона ID для нахождения ID метки, незарегистрированной в СЛК. Итак, на широковещательный поисковый пакет, модулированный диапазоном идентификационных данных меток, ответит метка, не зарегистрированная в СЛК, идентификационные данные которой попадут в указанный диапазон. Если позиционирующий узел получает ответ в виде позиционирующего импульса хотя бы от одной метки в заданном диапазоне идентификационных данных, позиционирующий узел делит диапазон идентификационных данных пополам и посылает широковещательный поисковый пакет сначала с диапазоном идентификационных данных из одной половины, а потом из другой половины. Если в одной из этих половин получен ответ, то позиционирующий узел опять делит пополам половину, в которой получен ответ, и так далее, пока не останется только одни ID (идентификационные данные) метки. Эти найденные идентификационные данные и будут идентификационными данными искомой незарегистрированной метки.
Далее, зная идентификационные данные метки, позиционирующий узел может зарегистрировать метку в системе локального позиционирования и проводить поиск ее местоположения, используя все позиционирующие узлы, расположенные в системе локального позиционирования.
Необходимо подчеркнуть, что для удешевления конструкции и минимизации энергопотребления меток метки очень ограничены в функциональности и в режиме дальнего поля могут отправить только одиночный позиционирующий импульс. Такой импульс несет минимум информации и служит для определения положения метки в пространстве. Как было указано выше, наличие/отсутствие позиционирующего импульса метки используется как ответ «да/нет», соответственно, то есть, широковещательным поисковым пакетом с диапазоном ID меток опрашивается диапазон меток с вопросом «есть ли в радиусе работы системы хотя бы одна метка с данными из диапазона?». Если хотя бы одна метка посылает позиционирующий импульс в ответ на этот вопрос, система продолжает уточнять ID метки. Если нет - значит, в этом диапазоне ID меток нет, система прекращает опрос этого диапазона.
Если позиционирующий узел получает ответ в виде нескольких позиционирующих импульсов от нескольких незарегистрированных меток, имеющих идентификационные данные в заданном диапазоне идентификационных данных, позиционирующий узел делит диапазон идентификационных данных пополам и посылает широковещательный поисковый пакет сначала с диапазоном идентификационных данных из одной половины, а потом из другой половины. Если ответ получен из одной половины и из другой половины, узел делит первую половину пополам и посылает широковещательный поисковый пакет сначала с диапазоном идентификационных данных из одной половины, а потом из другой половины, также узел делит вторую половину пополам и посылает широковещательный поисковый пакет сначала с диапазоном идентификационных данных из одной половины, а потом из другой половины. Если получен ответ, то позиционирующий узел опять делит пополам половину, в которой получен ответ, и так далее, пока не останется диапазон ID группы незарегистрированных меток. В результате узел найдет ID всех незарегистрированных меток и зарегистрирует их в системе. Далее группа узлов найдет местоположение этих меток, а пользователь из этих найденных меток должен сам выбрать свою метку, увидев наглядно все найденные метки.
С целью совместной работы нескольких систем локального позиционирования, когда их области пространства перекрываются, узлы системы могут принимать сигналы узлов соседних систем с целью определения ID соседних систем и автоматически заносить их в свою базу данных. Пользователь в этом процессе не участвует. Сам процесс определения соседних систем производится узлами периодически.
В дальнейшем система локального позиционирования в поисковых пакетах может указывать ID соседней системы, чтобы ее метки сохраняли молчание при поиске.
Предлагаемая система локального позиционирования может быть дополнена очками виртуальной реальности, например, если пользователь смотрит на часть помещения в очках виртуальной реальности, позиционирующий узел производит поиск именно в части помещения, попадающего в поле зрения очков виртуальной реальности. Используя очки виртуальной реальности, пользователь видит часть помещения, попадающего в поле зрения очков, и место, где располагается искомая метка, причем найденная метка может отображаться в любом желаемом виде.
Хотя изобретение описано в связи с некоторыми иллюстративными вариантами осуществления, следует понимать, что сущность изобретения, не ограничивается этими конкретными вариантами осуществления. Напротив, предполагается, что сущность изобретения включает в себя все альтернативы, коррекции и эквиваленты, которые могут быть включены в сущность и объем формулы изобретения.
Кроме того, изобретение сохраняет все эквиваленты заявляемого изобретения, даже если пункты формулы изобретения изменяются в процессе рассмотрения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫСОКОТОЧНАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2657185C1 |
| СЕНСОРНЫЕ СЕТИ НА ОСНОВЕ БЕСПРОВОДНЫХ УСТРОЙСТВ | 2007 |
|
RU2439847C2 |
| МНОГОКОЛЬЦЕВАЯ СЕТЬ ETHERNET И СПОСОБ ЕЕ ЗАЩИТЫ | 2011 |
|
RU2587407C2 |
| ОСНОВАННОЕ НА СЕТИ УПРАВЛЕНИЕ СООБЩЕНИЯМИ ОТЧЕТА В СЕТИ БЕСПРОВОДНОЙ СВЯЗИ | 2010 |
|
RU2540115C2 |
| Способ локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных | 2019 |
|
RU2744808C2 |
| СЕНСОРНЫЕ СЕТИ НА ОСНОВЕ БЕСПРОВОДНЫХ УСТРОЙСТВ | 2011 |
|
RU2547449C2 |
| СИСТЕМА МОБИЛЬНОЙ СВЯЗИ | 2014 |
|
RU2554533C1 |
| СИСТЕМА МОБИЛЬНОЙ СВЯЗИ | 2015 |
|
RU2599542C1 |
| СИСТЕМА МОБИЛЬНОЙ СВЯЗИ | 2009 |
|
RU2461149C1 |
| СИСТЕМА МОБИЛЬНОЙ СВЯЗИ | 2009 |
|
RU2511040C2 |
Изобретение относится к радиотехнике и может использоваться в системах локального позиционирования, а именно в устройствах поиска и регистрации меток. Технический результат состоит в уменьшении потребляемой мощности в метке и в позиционирующем узле, в обеспечении исключения наложения друг на друга сигналов, полученных от множества меток. Для этого в способе регистрация метки происходит в режиме ближнего поля. Метка сохраняет идентификационные данные системы локального позиционирования. Позиционирующий узел сохраняет идентификационные данные метки. Позиционирующие узлы отсылают в пространство системы локального позиционирования адресные поисковые пакеты. Искомая метка отвечает позиционирующим импульсом. Позиционирующие узлы отсылают в пространство системы локального позиционирования широковещательные поисковые пакеты. Для обнаружения идентификационных данных метки используется метод бисекции. 3 н. и 6 з.п. ф-лы, 3 ил.
1. Способ регистрации метки в системе локального позиционирования, содержащий этапы, на которых:
включают позиционирующий узел в режим ближнего поля, при котором мощность позиционирующего узла снижается, для уменьшения расстояния, на которое могут распространяться поисковые пакеты позиционирующего узла;
располагают регистрируемую метку на расстояние от позиционирующего узла, не превышающее расстояния, на которое могут распространяться пакеты этого позиционирующего узла в режиме ближнего поля;
позиционирующий узел отсылает пакет для добавления метки в систему, содержащий идентификационные данные системы локального позиционирования;
метка сохраняет идентификационные данные системы локального позиционирования;
метка отсылает ответный пакет, модулированный своими идентификационными данными в позиционирующий узел;
позиционирующий узел запоминает идентификационные данные метки и присваивает регистрируемой метке статус «зарегистрирована».
2. Способ по п. 1, дополнительно содержащий этап, на котором позиционирующий узел отправляет на смартфон пользователя статус «зарегистрирована» для указанной метки.
3. Способ поиска метки, зарегистрированной в системе локального позиционирования, содержащий этапы, на которых:
посылают команду по меньшей мере одному позиционирующему узлу на поиск зарегистрированной метки;
включают по меньшей мере один позиционирующий узел в режим дальнего поля, в котором мощность позиционирующего узла повышается до максимально возможной, для достижения максимального расстояния, на которое могут распространяться поисковые пакеты позиционирующего узла;
по меньшей мере один позиционирующий узел отправляет адресные поисковые пакеты, модулированные идентификационными данными искомой зарегистрированной метки, по всем направлениям системы локального позиционирования,
каждая из зарегистрированных меток, находящихся в системе локального позиционирования:
принимает адресный поисковый пакет, модулированный идентификационными данными искомой зарегистрированной метки,
выделяет идентификационные данные из адресного поискового пакета,
определяет, совпадают ли выделенные идентификационные данные с ее идентификационными данными,
отправляет в пространство позиционирующий импульс при определении совпадения выделенных идентификационных данных с ее идентификационными данными;
по меньшей мере один позиционирующий узел принимает позиционирующий импульс от метки и присваивает метке статус «найдена»;
причем если идентификационные данные зарегистрированной метки не совпадают с идентификационными данными искомой зарегистрированной метки, которыми модулирован адресный поисковый пакет, зарегистрированная метка не отправляет позиционирующий импульс.
4. Способ по п. 3, в котором один из по меньшей мере одного позиционирующего узла является ведущим позиционирующим узлом, причем если позиционирующих узлов больше чем один, остальные позиционирующие узлы являются подчиненными позиционирующими узлами,
причем подчиненные позиционирующие узлы получают команды от ведущего узла на отсылку адресных поисковых пакетов в системе локального позиционирования.
5. Способ поиска идентификационных данных по меньшей мере одной искомой метки, не зарегистрированной в системе локального позиционирования, причем способ содержит этапы, на которых:
а) по меньшей мере один позиционирующий узел получает команду от пользователя на поиск по меньшей мере одной искомой метки, имеющей неизвестные системе локального позиционирования идентификационные данные и незарегистрированной в системе локального позиционирования;
б) по меньшей мере один позиционирующий узел посылает по меньшей мере один широковещательный поисковый пакет, модулированный диапазоном идентификационных данных, содержащим идентификационные данные всех существующих меток, и идентификационными данными системы;
в) по меньшей мере одна незарегистрированная метка, находящаяся в системе:
принимает широковещательный поисковый пакет,
выделяет диапазон идентификационных данных из широковещательного поискового пакета,
определяет, совпадают ли идентификационные данные, которыми модулирован широковещательный поисковый пакет, с ее идентификационными данными,
отправляет в пространство системы локального позиционирования позиционирующий импульс при определении совпадения принятых идентификационных данных с ее идентификационными данными,
причем если идентификационные данные по меньшей мере одной незарегистрированной метки не совпадают с идентификационными данными, которыми модулирован широковещательный поисковый пакет, незарегистрированная метка не отправляет позиционирующий импульс в ответ на широковещательный поисковый пакет;
г) если по меньшей мере один позиционирующий узел получает ответ в виде по меньшей мере одного позиционирующего импульса в заданном диапазоне идентификационных данных, позиционирующий узел делит диапазон идентификационных данных пополам и посылает широковещательный поисковый пакет, сначала модулированный диапазоном идентификационных данных из одной половины, а потом из другой половины,
д) если в одной из упомянутых половин получен ответ в виде по меньшей мере одного позиционирующего импульса, позиционирующий узел повторяет этап (г) для этой половины диапазона, причем
е) этапы (г) и (д) осуществляются до тех пор, пока не останутся только идентификационные данные по меньшей мере одной метки, эти идентификационные данные и являются идентификационными данными по меньшей мере одной искомой метки, незарегистрированной в системе локального позиционирования.
6. Способ по п. 5, в котором каждая из зарегистрированных в системе меток принимает по меньшей мере один широковещательный поисковый пакет и, выделив идентификационные данные системы из широковещательного поискового пакета, совпадающие с идентификационными данными системы, сохраненными в памяти зарегистрированной метки, не отвечает на такой широковещательный поисковый пакет.
7. Способ по п. 5, в котором один из по меньшей мере одного позиционирующего узла является ведущим позиционирующим узлом, причем если позиционирующих узлов больше чем один, остальные позиционирующие узлы являются подчиненными позиционирующими узлами,
причем подчиненные позиционирующие узлы получают команды от ведущего узла на отсылку широковещательных поисковых пакетов в системе локального позиционирования.
8. Способ по п. 5, дополнительно содержащий этап, на котором
по меньшей мере один позиционирующий узел делит пространство системы локального позиционирования на сектора,
в каждом из секторов осуществляются этапы (б-е),
причем если по меньшей мере один позиционирующий узел не получает позиционирующий импульс в одном из секторов, по меньшей мере один позиционирующий узел переключается на поиск в следующем секторе.
9. Способ по п. 5, в котором по меньшей мере один широковещательный поисковый пакет дополнительно модулирован идентификационными данными одной или более других систем локального позиционирования.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ И СИСТЕМА ДЛЯ НАВИГАЦИИ С ИСПОЛЬЗОВАНИЕМ СВЯЗАННЫХ ГЕОГРАФИЧЕСКИХ РЕГИОНОВ | 2012 |
|
RU2607417C2 |
| Токарный резец | 1924 |
|
SU2016A1 |
| US 5266925 A, 30.11.1993. | |||

