Область техники
Изобретение относится к локальному позиционированию, а именно к метке, используемой в системе позиционирования, способу работы такой метки, к системе локального позиционирования и к способу работы системы локального позиционирования.
Описание предшествующего уровня техники
Наряду с широко известными спутниковыми системами глобального позиционирования существует также потребность в системах локального позиционирования, которые используются для решения задач нахождения местоположения различных предметов/субъектов с высокой точностью, как в помещениях, так и вне помещений.
На сегодняшний день существует множество видов систем локального позиционирования, наиболее распространенными из которых являются системы с использованием пассивных меток RFID (радиочастотная идентификация) и системы с использованием активных меток со сверхширокополосными СВЧ сигналами.
Обычный размер известных RFID меток (радиочастотная идентификация) составляет 20-50 мм. Такие метки имеют низкую частоту зарядки, работают без батарейки и могут быть гибкими. Однако, такие метки имеют низкую точность обнаружения.
Известные системы, использующие активные сверхширокополосные метки сверхширокой полосы пропускания, имеют высокую точность обнаружения. Для работы в таких метках используется батарейка. Такие метки могут быть только жесткими и имеют достаточно большие размеры из-за наличия батарейки.
Из уровня техники известен способ и система для миниатюрных пассивных RFID-меток и считывателей, документ US 8558672 A1, опубликованный 15.10.2013.
Известное решение раскрывает небольшие маломощные RFID-метки. При реализации известного решения используются средства связи с малой мощностью для передачи данных между меткой и считывателем и относительно узкополосные средства с высокой мощностью, чтобы дистанционно активировать метку. Недостатком известного решения является то, что для его осуществления необходимо использовать восходящую линию связи и нисходящую линию связи, а также необходимо иметь приемник в метке.
Также из уровня техники известна система и способ радиочастотной локации, документ US 9436858 B2, опубликованный 06.09.2016.
В известном решении раскрыты система и способ радиочастотной локации, которые решают проблему точного определения местоположения движущейся целевой метки в сложной среде, причем информация о местоположении предоставляется посредством использования фиксированных активных меток RFID, причем информация о местоположении мобильной метки непосредственно передается считывателю в центр области определения местоположения с большого расстояния. В известном решении используется дистанционный координатор и тактовая информация в инструкции передачи, чтобы координировать и планировать время связи между подвижной меткой и меткой местоположения.
Недостатками известного решения являются необходимость использования батарейки в метке, необходимость наличия приемника в метке. Причем использование индикатора относительного уровня сигнала при определении местоположения приводит к низкой точности определения местоположения.
Таким образом, известные из уровня техники решения имеют следующие недостатки:
для работы известных меток необходимо использование батареи;
известные метки имеют достаточно большие размеры;
обеспечивается низкая точность определения местоположения;
количество используемых меток необходимо ограничивать из-за их высокой стоимости.
Предлагаемое изобретение направлено на устранение недостатков известного уровня техники.
Предлагаемое изобретение объединяет в одном устройстве все преимущества перед известным уровнем техники, а именно предлагаемое устройство используется без батареи и является дешевым, подобно известной пассивной метке RFID, а также при использовании предлагаемого устройства обеспечивается высокая точность определения местоположения (позиционирования), как и при использовании известной сверхширокополосной метки. Кроме того, предлагаемое изобретение имеет дополнительные преимущества по сравнению с известным уровнем техники, а именно возможность вызова только желаемых меток и игнорирования других меток, при этом возможна зарядка метки от любого электромагнитного источника в заданной полосе пропускания для ISM (промышленный, научный и медицинский диапазон).
Сущность изобретения
Предлагается система локального позиционирования, содержащая: ведущий узел; по меньшей мере два подчиненных узла; по меньшей мере одну метку, имеющую ее назначенные идентификационные данные; причем ведущий узел связан с по меньшей мере двумя подчиненными узлами и устройством пользователя; причем каждый из ведущего и подчиненных узлов выполнены с возможностью передачи поисковых импульсов, модулированных идентификационными данными метки, положение которой необходимо найти, в пространство, где располагается по меньшей мере одна метка, имеющая свои идентификационные данные; причем идентификационные данные по меньшей мере одной метки, положение которой необходимо найти, получают ведущим узлом от устройства пользователя и передают ведущим узлом по меньшей мере двум подчиненным узлам; причем каждая из по меньшей мере одной метки выполнена с возможностью: приема поисковых импульсов, модулированных идентификационными данными, накопления энергии зарядки, выделения идентификационных данных из поискового импульса, модулированного идентификационными данными, излучения позиционирующего импульса, при определении меткой совпадения принятых идентификационных данных с ее идентификационными данными; причем каждый из ведущего и подчиненных узлов выполнены с возможностью приема позиционирующего импульса от по меньшей мере одной метки; каждый из по меньшей мере двух подчиненных узлов выполнен с возможностью ретрансляции принятого позиционирующего импульса от по меньшей мере одной метки ведущему узлу; ведущий узел выполнен с возможностью приема от по меньшей мере одного из по меньшей мере двух подчиненных узлов позиционирующего импульса от метки; причем ведущий узел выполнен с возможностью расчета положения в пространстве метки, положение которой необходимо найти, по полученным ретранслированным позиционирующим импульсам от по меньшей мере двух подчиненных узлов и по полученным позиционирующим импульсам от по меньшей мере одной метки, положение которой необходимо найти; ведущий узел также выполнен с возможностью отправки информации о положении в пространстве метки, положение которой необходимо найти, в устройство пользователя. Ведущий узел включает в себя передатчик поискового импульса, микроконтроллер, позиционирующий приемник, интерфейс для связи с пользователем, антенну, ретрансляционный приемник. Антенна связана с ретрансляционным приемником и позиционирующим приемником, ретрансляционный приемник связан с микроконтроллером, позиционирующий приемник связан с передатчиком поискового импульса, передатчик поискового импульса связан с микроконтроллером. Микроконтроллер также связан с интерфейсом для связи с пользователем. Подчиненный узел включает в себя передатчик поискового импульса, микроконтроллер, позиционирующий приемник, ретрансляционный передатчик, антенну, причем антенна связана с ретрансляционным приемником и позиционирующим приемником, ретрансляционный приемник связан с микроконтроллером, позиционирующий приемник связан с передатчиком поискового импульса, передатчик поискового импульса связан с микроконтроллером. Ведущий узел связан с каждым из подчиненных узлов по проводной или беспроводной связи. Метка включает в себя харвестер, позиционирующий передатчик, антенну, микроконтроллер. Харвестер также включает в себя выпрямитель, накопитель энергии, пороговое устройство, причем выпрямитель выполнен с возможностью преобразования радиочастотных колебаний в постоянное напряжение и связан с пороговым устройством и накопителем энергии, пороговое устройство связано с микроконтроллером, антенна связана с выпрямителем и позиционирующим передатчиком, микроконтроллер связан с позиционирующим передатчиком, причем накопитель энергии выполнен с возможностью передачи энергии на микроконтроллер и позиционирующий передатчик. В одном варианте накопитель энергии представляет собой конденсатор.
Также предлагается способ работы системы локального позиционирования, содержащий этапы, на которых:
а) ведущий узел получает команду от пользователя на поиск по меньшей мере одной метки, имеющей свои идентификационные данные, положение которой необходимо найти;
б) ведущий узел выдает команду связанным с ним по меньшей мере двум подчиненным узлам на поиск указанной по меньшей мере одной метки, положение которой необходимо найти, причем команда содержит идентификационные данные метки, положение которой необходимо найти;
в) ведущий узел и по меньшей мере два подчиненных узла посылают поисковые импульсы, модулированные идентификационными данными метки, положение которой необходимо найти, в пространство, где располагается по меньшей мере одна метка;
г) по меньшей мере одна метка принимает по меньшей мере один поисковый импульс, модулированный идентификационными данными,
причем метка, принявшая поисковый импульс, модулированный идентификационными данными:
накапливает энергию принятого поискового импульса в качестве энергии зарядки,
выделяет идентификационные данные из поискового импульса, модулированного идентификационными данными,
определяет, совпадают ли идентификационные данные с ее идентификационными данными,
отправляет в пространство позиционирующий импульс при определении совпадения принятых идентификационных данных с ее идентификационными данными;
д) ведущий узел и по меньшей мере два подчиненных узла принимают позиционирующий импульс;
причем подчиненный узел ретранслирует принятый позиционирующий импульс ведущему узлу;
е) ведущий узел рассчитывает положение в пространстве метки, положение которой необходимо найти, по полученным ретранслированным позиционирующим импульсам и по полученному позиционирующему импульсу от по меньшей мере одной метки, положение которой необходимо найти;
ж) ведущий узел отправляет информацию о положении в пространстве метки, положение которой необходимо найти, в устройство пользователя.
Причем этап (е) содержит подэтапы, на которых: ведущий узел измеряет разность времен прихода позиционирующего импульса во все пары ведущий узел - подчиненный узел; с помощью измеренных разностей времен прихода позиционирующего импульса ведущий узел вычисляет координаты метки в пространстве относительно системы координат, например, привязанной к узлам и с началом координат, связанным с ведущим узлом. Для улучшения точности определения положения метки этапы (а)-(д) могут повторяться многократно.
Также предлагается метка для системы локального позиционирования, содержащая: антенну; харвестер; микроконтроллер; позиционирующий передатчик (см. фиг.3).
Также предлагается способ работы метки для системы локального позиционирования, содержащий этапы, на которых: антенна принимает энергию для зарядки из окружающей среды или из поискового импульса, модулированного идентификационными данными метки, которую необходимо найти; харвестер заряжается, накапливая энергию, полученную от принятого поискового импульса, модулированного идентификационными данными метки, которую необходимо найти, или из окружающей среды, выделяет идентификационные данные из поискового импульса, модулированного идентификационными данными метки, которую необходимо найти, передает выделенные идентификационные данные на микроконтроллер; микроконтроллер определяет - совпадают ли идентификационные данные с идентификационными данными метки, которую необходимо найти, выдает команды позиционирующему передатчику на формирование позиционирующего импульса, если идентификационные данные метки, которую необходимо найти, совпадают с идентификационными данными данной метки; если идентификационные данные метки, которую необходимо найти, совпадают с идентификационными данными данной метки: позиционирующий передатчик формирует позиционирующий импульс и передает его к антенне, и антенна излучает позиционирующий импульс, при этом харвестер разряжается. Причем, если идентификационные данные не совпадают с идентификационными данными метки, харвестер сохраняет энергию и передачу не осуществляет. В одном варианте накопительное устройство представляет собой конденсатор.
Краткое описание чертежей
Вышеописанные и другие признаки и преимущества настоящего изобретения поясняются в последующем описании, иллюстрируемом чертежами, на которых представлено следующее:
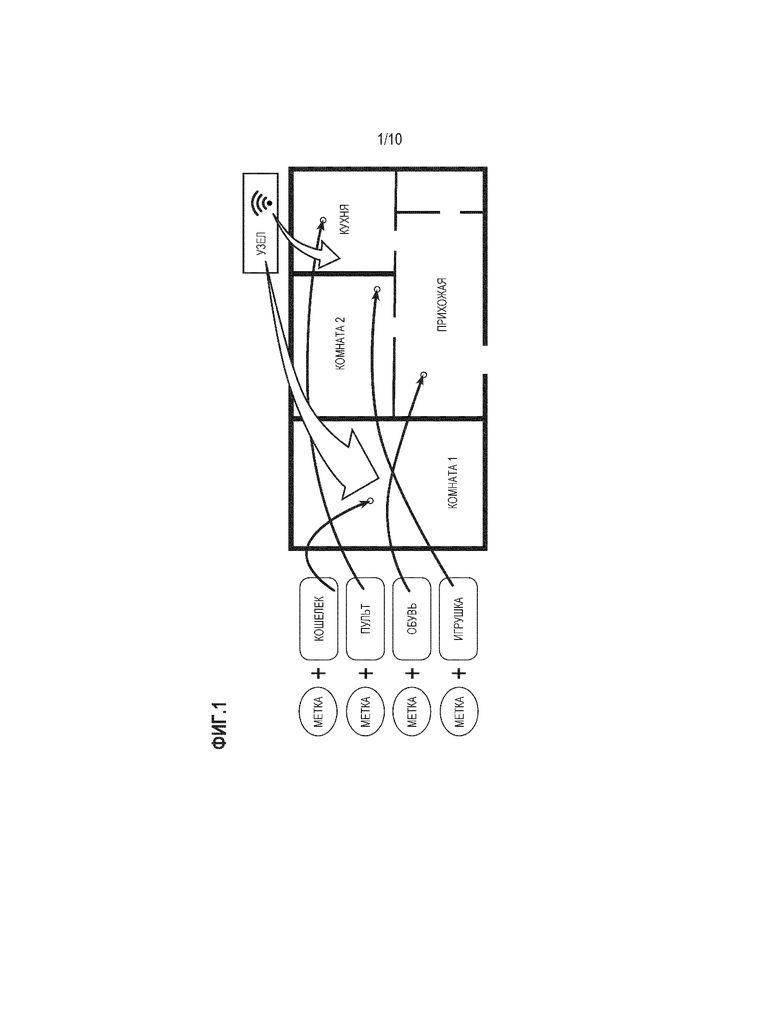
Фиг. 1 иллюстрирует возможность использования системы локального позиционирования в помещении;
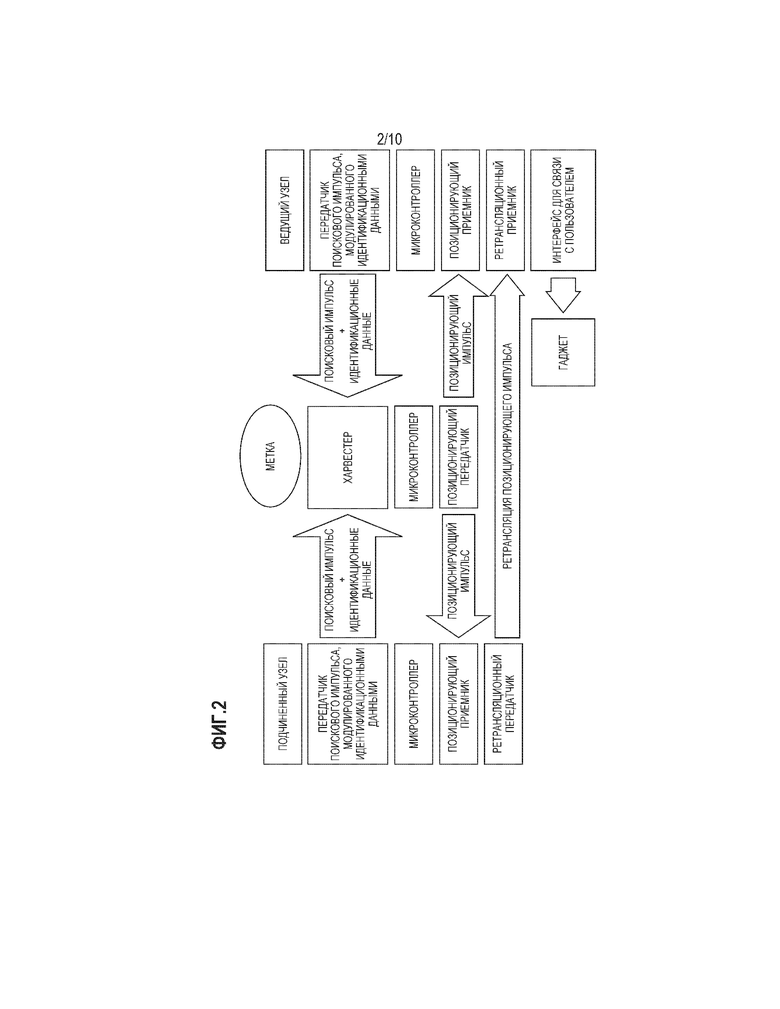
Фиг. 2 схематично изображает предлагаемую систему локального позиционирования, а именно порядок передачи энергии и данных между входящими в систему элементами;
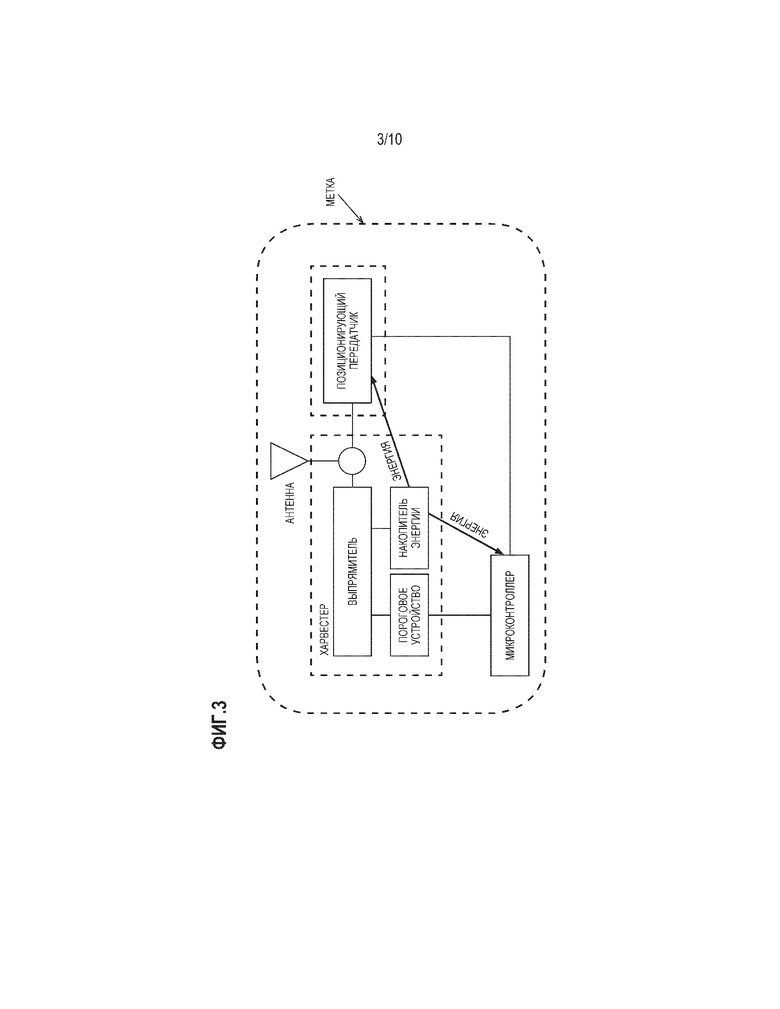
Фиг. 3 схематично изображает блок-схему метки, показаны связи между элементами;
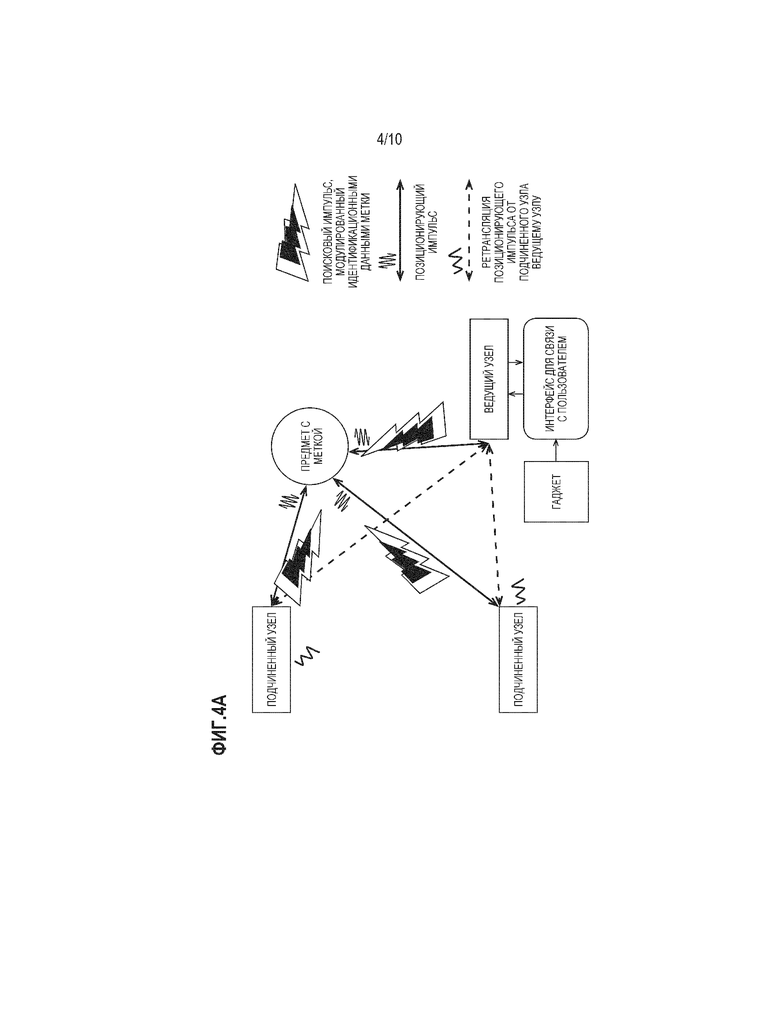
Фиг. 4A схематично изображает предлагаемый способ работы системы локального позиционирования, проиллюстрирована передача энергии;
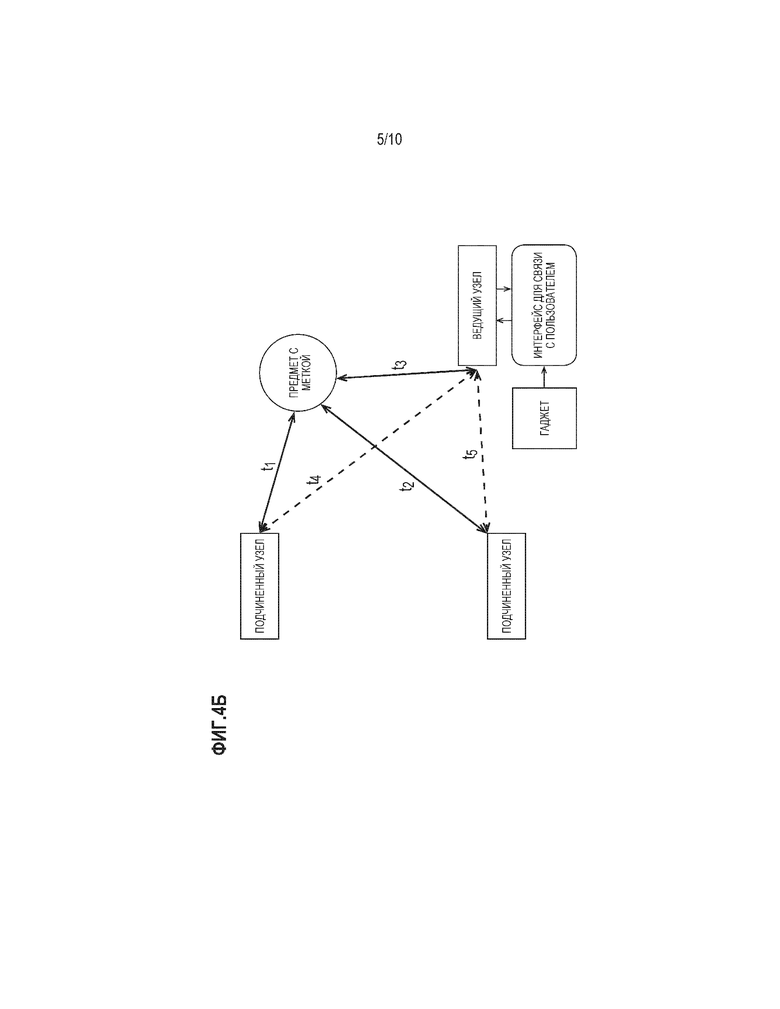
Фиг. 4Б схематично изображает предлагаемый способ работы системы локального позиционирования, проиллюстрированы времена и направления распространения импульсов;
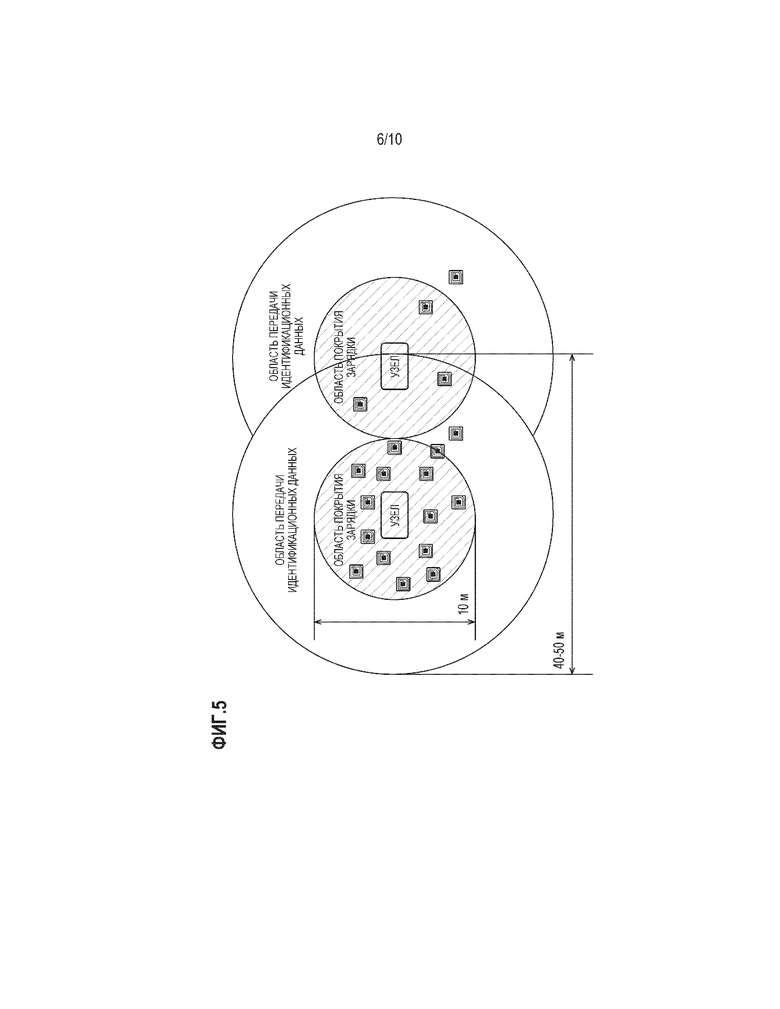
Фиг. 5 иллюстрирует дальность позиционирующей связи и дальность зарядки метки;
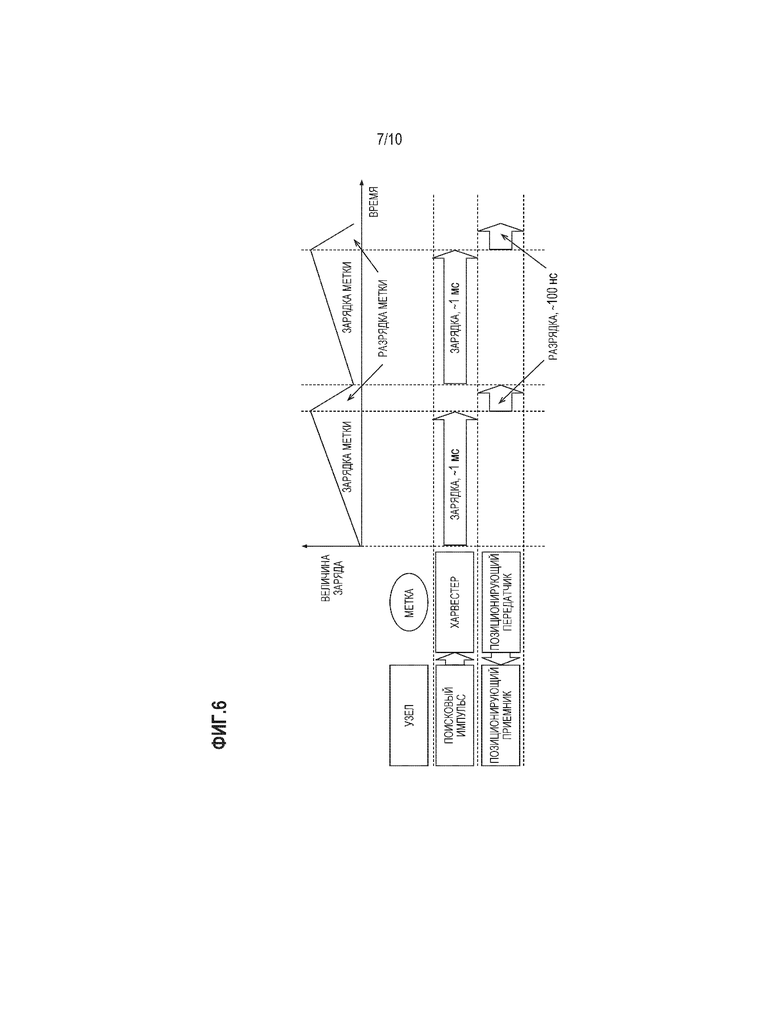
Фиг. 6 иллюстрирует способ работы метки, а именно периодичность зарядки метки и передачи ответного импульса;
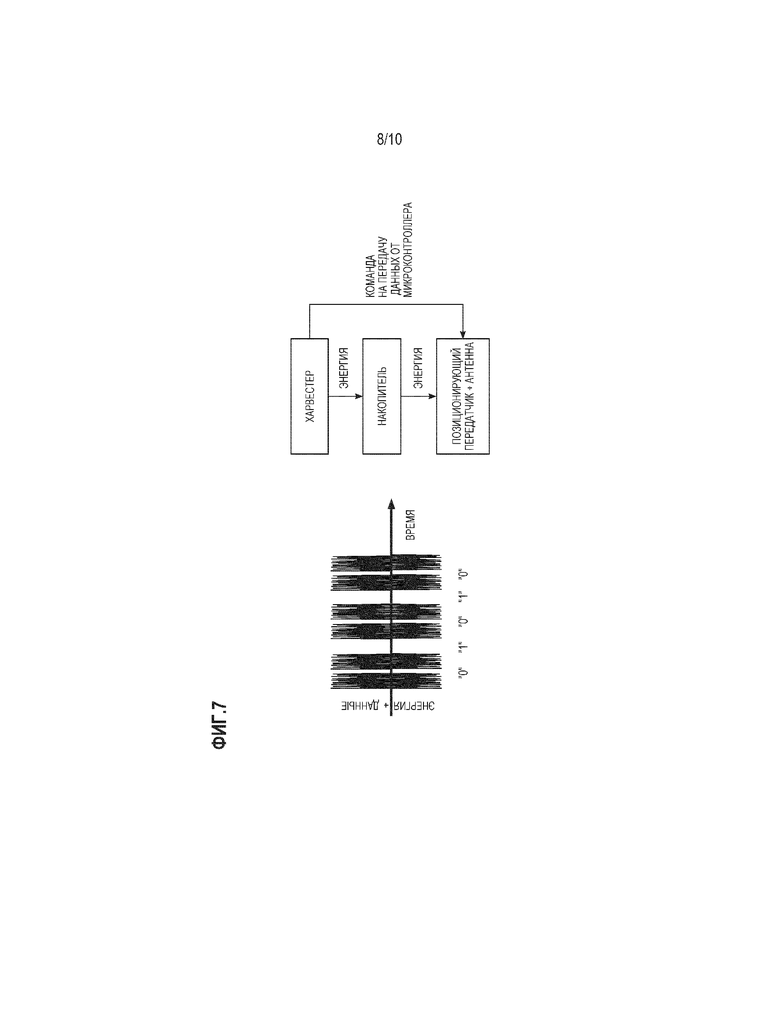
Фиг. 7 иллюстрирует устройство метки и схематично изображает поисковый импульс, модулированный идентификационными данными;
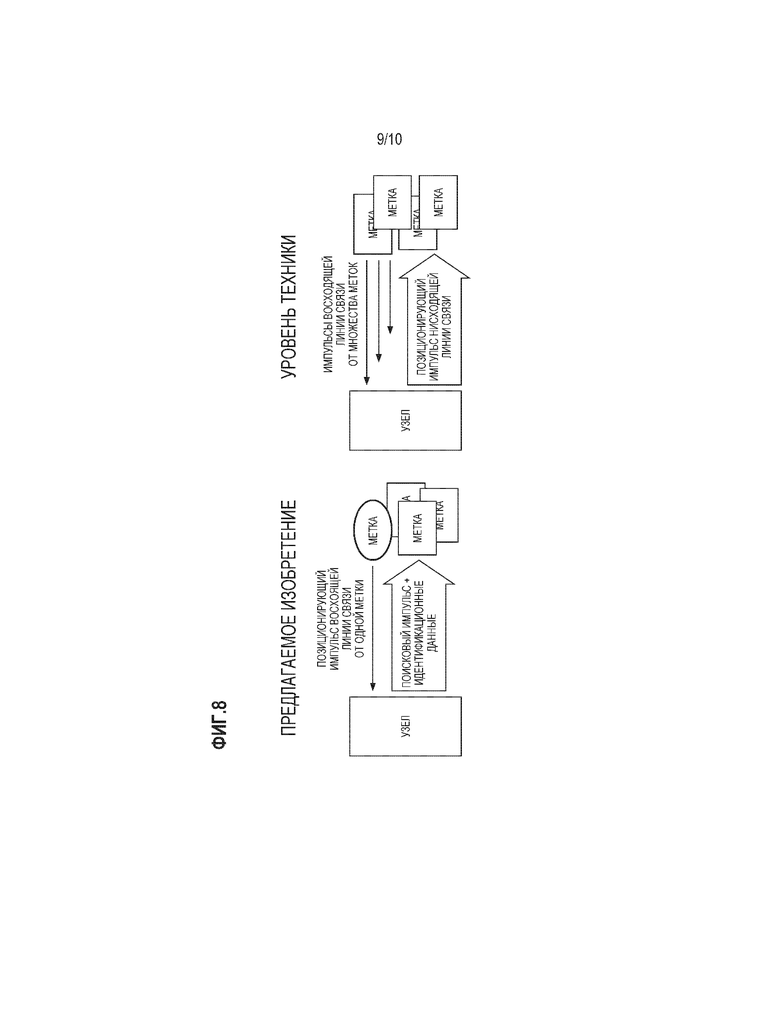
Фиг. 8 иллюстрирует сравнение работы системы, известной из уровня техники и системы, предлагаемой в настоящем изобретении;
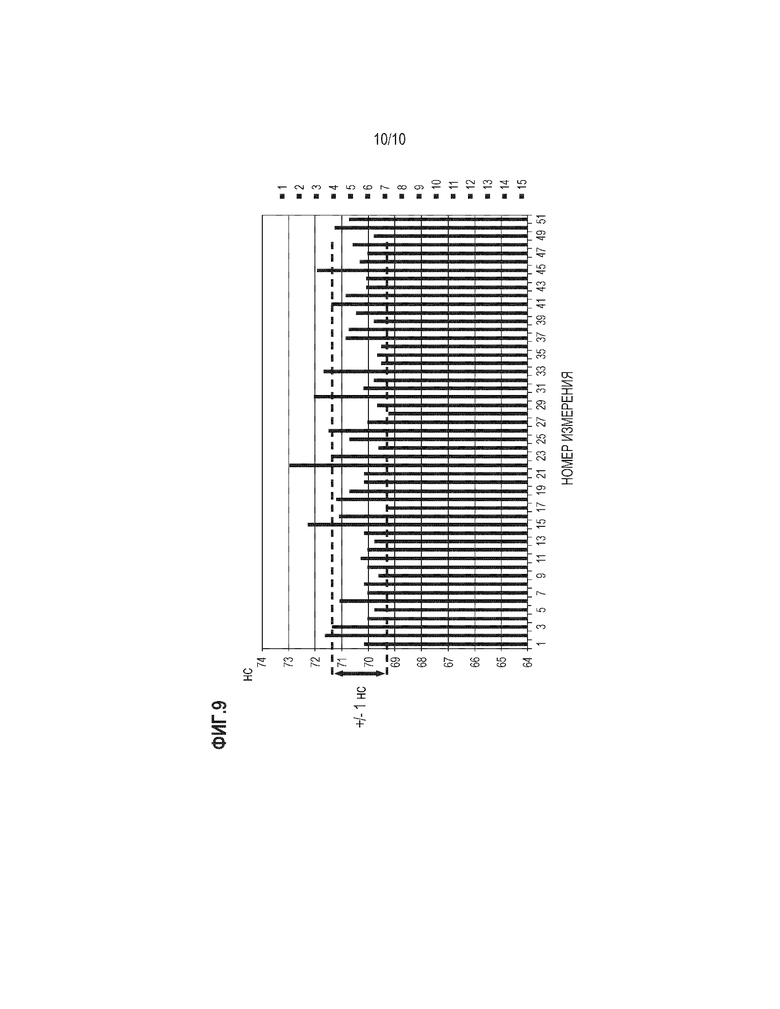
Фиг. 9 график экспериментальных результатов измерения погрешности в определении расстояния.
Подробное описание изобретения
Предлагаемое изобретение предоставляет множество возможностей пользователю, в частности, возможность определять местоположения предметов в помещении. Пользователь прикрепляет к желаемым предметам небольшие гибкие метки, каждая из которых содержит свою идентификационную информацию (см. фиг.1). Для работы системы локального позиционирования пользователю необходимо зарегистрировать на своем персональном устройстве (например, на смартфоне) идентификационную информацию метки и предмет/субъект, к которому метка прикреплена, то есть пользователь, используя необходимое количество меток, прикрепляет их к выбранным предметам и регистрирует на персональном устройстве идентификационную информацию каждой метки и предмет, к которому эта метка прикреплена, чтобы при получении от системы локального позиционирования информации о нахождении метки пользователь мог по идентификационному номеру найденной метки определить найденный предмет. Информацию о метке и соответствующем ей предмете возможно регистрировать в любом удобном для пользователя виде, например, в форме таблицы соответствия предмета и идентификационной информации метки. На фигуре 1 показаны примеры предметов, на которые пользователь может прикрепить метку, чтобы затем найти желаемый предмет в помещении, например, кошелек, пульт от телевизора, обувь, игрушки, при этом пользователь может выбрать любой предмет, чтобы в нужный момент найти его местоположение с помощью предлагаемой системы. Возможно создание различных приложений для пользователя, в которых с помощью предлагаемой системы локального позиционирования может осуществляться, например, нахождение местоположения домашних предметов, или обнаружение падения (например, для дистанционного слежения за пожилыми людьми), возможно также осуществление автоматизированной воспитательной программы (например, для повышения организованности детей), и т. п.
Пользователь может с комфортом использовать любое количество меток, не думая о замене батареек в каждой из них, а также прикреплять метку, имеющую маленький размер, к любому предмету, при этом только одна необходимая пользователю метка будет отвечать при вызове.
При этом обеспечивается низкое энергопотребление метки и точные результаты определения местонахождения метки (например, ± 10 см). В качестве позиционирующих импульсов, испускаемых позиционирующим передатчиком метки, могут быть использованы фрагменты сверхширокополосных/узкополосных сигналов радиочастотного диапазона. Для достижения высокой точности определения местоположения метки в качестве позиционирующего приемника используется детектор огибающей импульса с широкой полосой пропускания, значительно большей, чем 1/Т, где Т - длительность импульса, причем детекторы огибающей располагаются в узлах системы (ведущем и подчиненных). Соответственно термин «позиционирующая связь» обозначает связь между меткой и узлом, в которой используются только позиционирующие импульсы, термин «позиционирующие импульсы» обозначает импульсы, излучаемые позиционирующим передатчиком метки, причем метка излучает единичный позиционирующий импульс, который попадает в узлы. С помощью позиционирующего импульса возможно проведение разового позиционирования метки, термин «позиционирующий передатчик» обозначает устройство, предназначенное для генерации позиционирующих импульсов в метке.
Предлагаемое изобретение направлено на упрощение конструкции и уменьшение размеров метки, увеличение точности местонахождения метки, возможность работы метки без батареек, возможность использования множества меток одновременно.
На фигуре 2 схематично изображены предлагаемая система локального позиционирования и способ работы системы, порядок передачи энергии и данных между входящими в систему элементами.
Система содержит связанные друг с другом и разнесенные в пространстве ведущий узел, связанный с пользовательским интерфейсом, по меньшей мере два подчиненных узла (на фигуре 2 представлен только один из них) и по меньшей мере одну метку, имеющую свои идентификационные данные. Узлы связаны между собой по проводной или беспроводной связи, причем ведущий узел может передавать команды подчиненным узлам.
На фигуре 3 схематично изображена блок-схема метки и показаны связи между элементами.
Каждая из множества используемых меток включает в себя харвестер (сборщик энергии и информации), накапливающий энергию (от СВЧ-импульсов), позиционирующий передатчик, антенну для излучения позиционирующего импульса, переданного позиционирующим передатчиком, а также для приема энергии из окружающей среды и передачи ее харвестеру, микроконтроллер для хранения идентификационных данных данной метки, распознавания идентификационных данных метки в принимаемом поисковом импульсе, а также для управления процессами передачи, контроля процесса заряда, и т. п.
Харвестер в метке отвечает за прием и хранение энергии и данных и за передачу данных микроконтроллеру.
Харвестер метки содержит выпрямитель периодических колебаний, накопитель энергии (например, конденсатор), пороговое устройство. Выпрямитель предназначен для приема периодических колебаний (СВЧ колебаний) от антенны и преобразования полученной энергии в энергию DC (Direct Current - постоянный ток) и передачу энергии в накопитель энергии, например, конденсатор. Выпрямитель харвестера может быть изготовлен, например, по классической диодной схеме, либо иным известным способом, обеспечивающим преобразование периодических радиочастотных колебаний в постоянное напряжение. Кроме того, выпрямитель харвестера подает импульс в пороговое устройство для выделения бинарных данных и последующей передачи их в микроконтроллер. Пороговое устройство необходимо для декодирования идентификационных данных и представления их в бинарном виде из полученного поискового импульса, модулированного идентификационными данными в виде аналогового импульса.
Микроконтроллер (MCU) сравнивает собственные идентификационные данные метки с только что полученными идентификационными данными, выделенными из принятого поискового импульса, модулированного идентификационными данными. При совпадении идентификационных данных метки с принятыми идентификационными данными микроконтроллер посылает команду в позиционирующий передатчик на формирование единичного ответного импульса (позиционирующего импульса).
Подчиненные узлы, получив импульс от метки, передают ответный импульс в ведущий узел, который далее передает данные о местоположении метки пользователю.
Метка, предлагаемая в настоящем изобретении, обеспечивает следующие преимущества по сравнению с метками, известными из уровня техники: работа метки осуществляется без использования батарейки, в метке не используется устройство-приемник, благодаря чему появляется возможность уменьшить размер метки (~ 10 мм), метку можно прикрепить практически к любому желаемому предмету. Кроме того, поскольку метка является гибкой, ее возможно использовать для крепления к любым неровным поверхностям - гибким, жестким или полужестким. Поисковый импульс, излучаемый узлами, модулируется идентификационными данными метки, которую требуется найти, что приводит к тому, что при поиске отвечает только одна нужная метка, которую требуется найти. Использование в метке позиционирующего передатчика, который формирует одиночные позиционирующие-импульсы, в ответ на поисковый импульс, модулированный идентификационными данными, приводит к точному измерению расстояния с помощью узлов.
Каждый подчиненный узел включает в себя свой передатчик поискового импульса, модулированного идентификационными данными, микроконтроллер, позиционирующий приемник, ретрансляционный передатчик, антенну.
Позиционирующий приемник представляет собой, например, детектор огибающей импульса. Импульс, пропущенный через такой приемник, обрабатывается посредством усиления низкочастотной фильтрации, т.е. сначала выполняется усиление, а затем низкочастотная фильтрация для отсечения несущей высокочастотной составляющей от импульса, и выделение этой огибающей, являющейся низкочастотным импульсом. Ведущий узел принимает передний фронт огибающей в качестве момента для начала отсчета временного интервала (разности времен прихода позиционирующих импульсов), а подчиненные узлы в момент детектирования переднего фронта огибающей переизлучают ведущему узлу ретранслированные позиционирующие импульсы. Ведущий узел принимает эти ретранслированные позиционирующие импульсы, выделяет их огибающую и по переднему фронту выделенных огибающих принимает их за окончание временных интервалов (разности времен прихода позиционирующих импульсов).
Ведущий узел включает в себя передатчик поискового импульса (СВЧ-энергии), микроконтроллер, позиционирующий приемник, ретранслятор, интерфейс для связи с персональным устройством пользователя, удобным пользователю (например, смартфоном), антенну, ретрансляционный приемник.
Узлы принимают позиционирующие импульсы от метки и излучают поисковые импульсы, модулированные идентификационными данными метки. Каждый из узлов имеет передатчик поискового импульса (например, СВЧ-энергии), которая модулируется идентификационными данными метки, которую необходимо найти, согласно командам ведущего узла. Узел передает в метку, не содержащую батареи, поисковый импульс, представляющий собой обладающий некоторой энергией сигнал, модулированный упомянутыми идентификационными данными. Необходимо отметить, что поисковый импульс является, например, непрерывным гармоническим импульсом на заданной частоте (отличной от диапазона частот позиционирующих импульсов, и преимущественно большой мощности, в предпочтительной форме - модулированный данными).
Необходимо отметить, что метка может принимать энергию от любого подходящего доступного источника СВЧ либо любого другого внешнего источника электромагнитной энергии, излучающего на рабочей частоте харвестера. Энергия собирается харвестером посредством накопителя энергии. Полученная энергия является модулированной идентификационными данными метки, которую пользователь желает найти.
Идентификационные данные метки представляют собой разрывы в поисковом импульсе (см. фиг. 7). Они выделяются харвестером посредством порогового устройства, как описано выше, или операционного усилителя посредством любого подобного устройства. Итак, харвестер после получения поискового импульса, содержащего энергию, модулированную идентификационными данными метки, подает его на конденсатор для накопления энергии и на пороговое устройство для выделения идентификационных данных, которые направляются в микроконтроллер. Если микроконтроллер определяет, что данные содержат идентификационный номер, совпадающий с идентификационным номером данной метки, микроконтроллер выдает команду позиционирующему передатчику на формирование позиционирующего импульса.
На фигуре 2 схематично изображена аппаратная реализация предлагаемой высокоточной локальной системы позиционирования.
Система позиционирования содержит:
ведущий узел;
по меньшей мере два подчиненных узла (на фигуре 2 изображен только один подчиненный узел);
по меньшей мере одну метку;
причем ведущий узел включает в себя передатчик поискового импульса, микроконтроллер, позиционирующий приемник, интерфейс для связи с пользователем, антенну, ретрансляционный приемник,
подчиненный узел включает в себя передатчик поискового импульса, микроконтроллер, позиционирующий приемник, ретранслятор, антенну;
метка включает в себя антенну, харвестер, позиционирующий передатчик, микроконтроллер.
Необходимо отметить, что все приемопередающие элементы: ретрансляционный приемник и передатчик, позиционирующий приемник, позиционирующий передатчик, передатчик поискового импульса, харвестер используют антенны для передачи и приема. При этом в каждой метке или узле для всех этих целей может использоваться единая антенна.
Система работает следующим образом.
На фигурах 2 и 4A схематично изображен способ работы системы позиционирования:
- ведущий узел получает команду от пользователя на поиск метки, которую необходимо найти;
- ведущий узел выдает управляющие команды связанным с ним подчиненным узлам подготовиться к приему сигала определения положения метки, причем подготовка заключается во включении позиционирующих приемников и ретрансляторов. По той же команде подчиненные узлы могут включать передатчики поискового импульса, и/или подчиненные узлы могут модулировать передаваемую энергию идентификационными данными метки, которую необходимо найти, полученными от ведущего узла;
- ведущий узел и подчиненные узлы посылают в окружающую среду (пространство), где располагаются метки, поисковые импульсы, модулированные идентификационными данными метки, которую необходимо найти;
- в каждой метке, окружающей узлы и находящейся в зане их действия, при получении поисковых импульсов, модулированных идентификационными данными, происходит зарядка накопительного элемента в харвестере метки и сравнение полученных идентификационных данных с собственными идентификационными данными в микроконтроллере метки, при этом если полученные идентификационные данные не совпадают с идентификационными данными метки, получившей поисковый импульс, метка не отвечает на поисковый импульс, тем не менее, при этом происходит зарядка накопительного элемента харвестера,
если полученные идентификационные данные совпадают с идентификационными данными метки, получившей поисковый импульс, метка передает узлам позиционирующий импульс,
- при получении позиционирующего импульса от метки подчиненные узлы ретранслируют этот импульс ведущему узлу;
- ведущий узел рассчитывает разность моментов времени прихода импульса от метки, то есть временной интервал между моментом прихода импульса от метки в ведущий узел и моментом прихода ретранслированного импульса от метки, пришедшего от подчиненного узла в ведущий узел, между всеми парами ведущий узел - подчиненный узел;
- по этим разностям времен прихода ведущим узлом вычисляются декартовы координаты метки в пространстве относительно расположения узлов;
- ведущий узел рассчитывает, какой из узлов является ближайшим к метке, и посылает команду узлу, ближайшему к метке, на повторение процесса определения местоположения;
в дальнейшем при повторении процесса определения местоположения ближайший к метке узел посылает поисковый импульс, модулированный идентификационными данными метки, которую необходимо найти, и ретранслирует ответный импульс ведущему узлу,
- процесс определения положения может повторяться несколько раз для уменьшения погрешности.
При этом задается погрешность, необходимая для получения заданной на заводе точности позиционирования. Т.е. совершают N измерений, тем самым уменьшают погрешность до пределов, удовлетворяющих заданной точности (например, от 0 до 10 см). При этом для единичного позиционирующего импульса окончанием определения местоположения, с точки зрения ведущего узла, является факт получения позиционирующего импульса от метки, а также ретранслированных импульсов от подчиненных узлов.
При необходимости ведущий узел повторяет измерение разности времен прихода импульса между всеми парами узлов (ведущий узел - подчиненный узел) и усредняет результат;
- ведущий узел передает полученные данные о координатах в пользовательское приложение.
Для пользователя можно отобразить расположение узлов и найденной метки на экране его персонального устройства известными способами, например, на плане помещения, где происходит поиск метки. В таком случае сами координаты метки и оси координат для пользователя отображать не требуется.
При этом один позиционирующий сигнал от метки может приниматься сразу несколькими узлами ведущим и подчиненными. Если какой-то из трех узлов не получит позиционирующий сигнал, то позиционирование не успешно, если позиционирующий сигнал принимает только один из узлов, тогда позиционирование также не успешно, в случае неуспешного позиционирования времена определить невозможно.
Необходимо отметить, что на фиг. 2 антенны не изображены, чтобы не загромождать рисунок, т.к. он предназначен для демонстрации последовательности и направлений передачи импульсов, а также блоков, ответственных за эти импульсы.
Дальнейшее использование рассчитанных координат приложением и отображение финального результата может быть различным.
Представление результатов измерения пользователю не обязательно должно быть в виде набора цифр декартовых координат. Возможно указание положения в виде точки на плане комнаты при виде сверху, либо точки на фотографии комнаты в реальном времени (по типу дополненной реальности), либо иным способом.
Необходимо отметить, что метод вычисления декартовых координат по измеренным разностям времен распространения от искомой точки к фиксированным, который применяется в данной системе является известным из уровня техники методом TdoA (Time difference of arrival - временная разница приема).
На фигуре 4Б показаны времена распространения позиционирующего импульса t1, t2, t3, излученного меткой до трех узлов, соответственно. Подчиненные узлы, приняв позиционирующий импульс от метки, ретранслируют его ведущему узлу. Ведущий узел, приняв позиционирующий импульс от метки (время прихода t3), а также ретранслированные позиционирующие импульсы от узлов (времена прихода t4, t5), определяет разность времен прихода △a= t1+t4-t3, △b= t1+t4-t3. Т.к. узлы фиксированы в пространстве, то времена t4 и t5 неизменны и могут быть измерены. Координаты метки x, y могут быть вычислены как функция F(△a, △b). Причем если ведущий узел не знает все три времени, то измерение невозможно. Временной синхронизации между узлами не требуется, при этом вычисление координат является широко известной и обычной задачей при любой триангуляции и не является предметом настоящего изобретения.
В подобных системах может быть осуществлен стандартный процесс калибровки. Он заключается в измерении времен распространения между всеми парами узлов ведущий-подчиненный.
Чтобы повысить точность определения расстояния, узел может много раз посылать к метке поисковый импульс, модулированный идентификационными данными, чтобы получить множество позиционирующих импульсов от метки, которую необходимо найти.
Подчиненные узлы могут ретранслировать ответный импульс в ведущий узел, который определяет разность времен прихода ответного импульса, по которой ведущий узел рассчитывает - какой из узлов находится ближе к предопределенной метке.
Как показано на фиг. 5, дальность позиционирующей связи больше, чем дальность зарядки. Область покрытия позиционирующей связи (то есть возможность передачи идентификационных данных) в предпочтительном варианте осуществления составляет порядка 40-50 м в диаметре с центром в узле, а область покрытия зарядки, которая зависит от эффективности харвестера и мощности передачи энергии, составляет порядка 10 м в диаметре, однако для специалиста очевидно, что могут быть использованы другие диапазоны расстояний. Как показано на фиг. 5, метки, расположенные в малых окружностях (на расстоянии от узла примерно 5 м), могут заряжаться как самими узлами, так и внешними источниками питания. Метки, расположенные за пределами малых окружностей, могут предпочтительно заряжаться только внешними источниками энергии. Для увеличения дальности передачи энергии можно сделать направленную антенну с отклоняемой диаграммой, либо несколько антенн с узкими диаграммами направленности, суммарно охватывающими все окружающее пространство.
На фигуре 6 показан способ работы метки. Зарядка метки и излучение меткой ответного импульса в виде единичного позиционирующего импульса осуществляются следующим образом.
Узел или вспомогательное устройство для зарядки (например, передатчик поискового импульса с антенной) излучает энергию (например, СВЧ-энергию), которая воспринимается харвестером и заряжает накопительный элемент харвестера. Зарядка накопительного элемента харвестера может длиться около 1 мс. Если от узла приходит энергия, модулированная идентификационными данными метки, которую необходимо найти, то накопительный элемент харвестера заряжается, и харвестер отправляет данные в микроконтроллер. Если микроконтроллер определяет, что полученные данные совпадают с идентификационными данными метки, то микроконтроллер выдает команду передатчику отправить ответный единичный позиционирующий импульс, который принимается всеми узлами.
При передаче позиционирующего единичного импульса позиционирующим передатчиком метки через антенну накопительное устройство харвестера разряжается. Разрядка накопительного устройства харвестера длится, например, около 100 нс. Причем накопительное устройство харвестера также может заряжаться от других принимаемых сигналов, или от узла, который излучает энергию, модулированную данными, не совпадающими с идентификационными данными этой метки. Поскольку зарядка и передача ответного импульса происходят на разных частотах, то они не мешают друг другу и могут происходить независимо друг от друга, то есть накопительное устройство харвестера может еще заряжаться, а позиционирующий импульс может уже передаваться, если энергии для его передачи достаточно.
Необходимо отметить, что в одном варианте исполнения передатчик может посылать позиционирующий импульс не дожидаясь, пока накопительное устройство харвестера зарядится полностью, а в другом варианте передатчик может посылать позиционирующий импульс только после того, как накопительное устройство харвестера зарядится полностью. Главным условием является, чтобы заряда должно было хватить на излучение позиционирующего импульса меткой.
Излучение одного позиционирующего импульса только от метки, которую необходимо найти, является одним из преимуществ настоящего изобретения по сравнению с предшествующим уровнем техники, где на посылаемую узлом энергию отзываются все метки, находящиеся в досягаемости узла, и таким образом узел должен сам выбрать из всех меток только одну искомую метку, что замедляет работу известных систем локального позиционирования.
На фигуре 7 проиллюстрирована работа метки и схематично изображен поисковый импульс, модулированный идентификационными данными. На схематичном виде цифрового импульса, излучаемого узлом, «0» и «1» обозначены идентификационные данные метки, представляющие собой разрывы в непрерывном импульсе энергии питания разной длительности, подаваемой узлом для зарядки метки. Поисковый импульс можно модулировать данными, например, в пределах 1-10 Кбит/с. Поисковый импульс может быть модулирован со скважностью, например, более 0,99 без существенной потери скорости зарядки из-за передачи данных. Пакет может иметь длину, например, около 32 байт, и может передаваться повторно для стабильного приема данных меткой. Каждый узел может обслуживать множество меток, передавая поисковые импульсы, модулированные идентификационными данными и принимая ответные импульсы от меток.
В метке используется позиционирующий одноимпульсный передатчик. В традиционных системах, использующих метку, узел передает на метку позиционирующий импульс нисходящей линии связи (см. фиг. 8), метка, содержащая приемник, батарейку и передатчик, сразу отвечает импульсом восходящей линии связи, узел определяет время пролета импульса и по времени пролета импульса известным способом определяет расстояние до метки. В предлагаемом изобретении узел направляет в метку поисковый импульс, модулированный идентификационными данными, приемник и батарейка не используются в предлагаемой метке, харвестер метки принимает энергию и данные, причем отвечать сразу не требуется, накопительное устройство харвестера может накопить необходимую для ответа энергию, после чего одноимпульсный позиционирующий передатчик отправляет позиционирующий импульс восходящей линии связи через антенну всем узлам. В предлагаемом изобретении обеспечивается очень малое потребление тока передатчиком метки, например, около 200 μА, напряжение составляет, например, около 3 V. Узел имеет возможность передавать мощность метке, например, до 10 Вт, что разрешено стандартом беспроводной связи диапазона ISM (промышленный, научный и медицинский диапазон).
Заявителем было проведено тестирование работы экспериментального образца предлагаемой системы.
На фигуре 9 показан график экспериментальных результатов измерения, показана погрешность нахождения местоположения метки.
По горизонтали отложены номера измерений, по вертикали - измеренная разность времен распространения импульса от метки до пары узлов. Несмотря на то, что в приведенном эксперименте было 2 узла, при позиционировании на плоскости должно быть минимум 3 узла (не на одной линии), при позиционировании в пространстве - минимум 4 узла (не в одной плоскости). Из графика следует, что погрешность нахождения разности времен распространения импульса при множестве измерений составляет всего ±1 нс, то есть при усреднении времени для N измерений, погрешность может быть уменьшена до 1/√N нс.
Необходимо отметить, что исходные измеряемые данные - это разность времен прихода импульсов в секундах. В дальнейшем их можно перевести в разность длины путей прохождения соответствующих импульсов известным образом.
Предлагаемое изобретение имеет множество практических приложений. В частности, одним из таких приложений является помощь в развитии аккуратности у детей. Например, родители могут прикрепить метки к любым желаемым детским вещам - игрушкам, книгам, одежде и т.д. Родители размещают помеченные вещи в указанном желаемом порядке, регистрируя (определяя) их местоположение в системе меток. Дети играют или пользуются вещами в своей обычной манере. После завершения взаимодействия детей с вещами, система отслеживает положение вещей в реальном времени, чтобы сравнить эти местоположения с предопределенными местоположениями, зарегистрированными родителями. Система обеспечивает обратную связь с детьми, например, в следующей форме: анимированный персонаж указывает, если вещи расположены не в том порядке, в котором их зарегистрировали родители. Также система может блокировать доступ к телевизору, электронным гаджетам, пока дети не возвратят вещи в предопределенные местоположения, зарегистрированные родителями.
Также предлагаемая система может помочь школьнику собрать школьный портфель, а родителям проконтролировать этот процесс.
Родители могут проконтролировать размещение помеченных предметов в портфеле для учебного цикла (например, на неделю), зарегистрировав необходимые метки по дням недели в системе.
Система может оповещать родителей и школьников, если школьник собрал портфель не в соответствии с зарегистрированными метками.
Хотя изобретение описано в связи с некоторыми иллюстративными вариантами осуществления, следует понимать, что сущность изобретения, не ограничивается этими конкретными вариантами осуществления. Напротив, предполагается, что сущность изобретения включает в себя все альтернативы, коррекции и эквиваленты, которые могут быть включены в сущность и объем формулы изобретения.
Кроме того, изобретение сохраняет все эквиваленты заявляемого изобретения, даже если пункты формулы изобретения изменяются в процессе рассмотрения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА И РЕГИСТРАЦИИ МЕТОК В СИСТЕМЕ ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2680719C1 |
| Способ локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных | 2019 |
|
RU2744808C2 |
| ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС ВЫСОКОТОЧНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ПАК ВТП ТС) | 2022 |
|
RU2803992C1 |
| СПОСОБ РАДИОПОИСКА И ПЕРЕХВАТА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2253578C1 |
| СИСТЕМА ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ И ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2309064C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВОЗБУЖДЕНИЯ ПРИЕМОПЕРЕДАЮЩЕЙ МЕТКИ | 2012 |
|
RU2578587C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ВОЗБУЖДЕНИЯ ПРИЕМОПЕРЕДАЮЩЕЙ МЕТКИ | 2015 |
|
RU2617719C2 |
| СПОСОБ РАДИОПОИСКА УГНАННЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2008 |
|
RU2351489C1 |
| УСТРОЙСТВО И УЗЕЛ ДЛЯ ОБНАРУЖЕНИЯ ПАРАМЕТРОВ ШИН ПРОХОДЯЩИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2013 |
|
RU2651352C2 |
| ЛОКАЛЬНАЯ СИСТЕМА МОНИТОРИНГА МЕСТОПОЛОЖЕНИЯ И ПАРАМЕТРОВ ДВИЖЕНИЯ СПОРТСМЕНОВ И СПОРТИВНЫХ СНАРЯДОВ | 2018 |
|
RU2691947C1 |
Изобретение относится к локальному позиционированию. Технический результат изобретения заключается в увеличении точности местонахождения метки, возможности работы метки без батареек, возможности использования множества меток одновременно. Система локального позиционирования содержит ведущий узел, по меньшей мере два подчиненных узла, по меньшей мере одну метку, имеющую свои идентификационные данные. Способ работы системы локального позиционирования содержит этапы, на которых ведущий узел получает команду от пользователя на поиск метки; ведущий узел и подчиненные узлы посылают поисковые импульсы, модулированные идентификационными данными метки; метка принимает поисковый импульс, накапливает энергию принятого поискового импульса и отправляет в пространство позиционирующий импульс при определении совпадения принятых идентификационных данных с ее идентификационными данными; ведущий узел рассчитывает положение метки в пространстве по принятым позиционирующим импульсам. 4 н. и 14 з.п. ф-лы, 10 ил.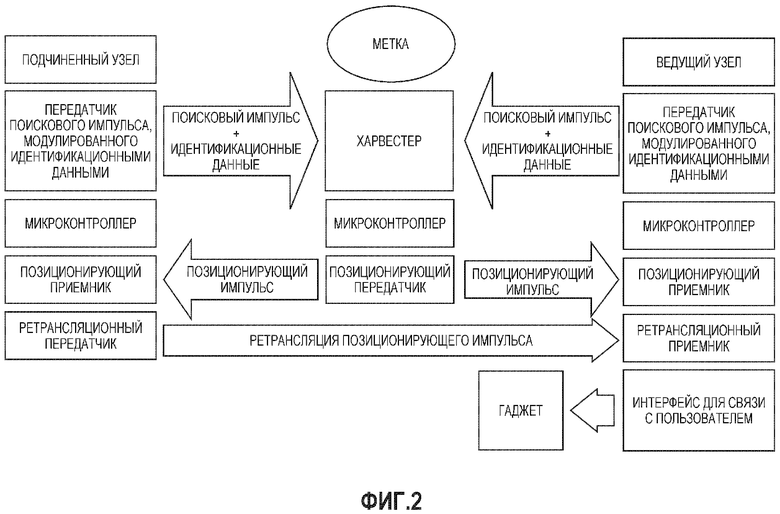
1. Система локального позиционирования, содержащая:
ведущий узел;
по меньшей мере два подчиненных узла;
по меньшей мере одну метку, имеющую свои идентификационные данные;
причем ведущий узел связан с по меньшей мере двумя подчиненными узлами и устройством пользователя;
причем каждый из ведущего и подчиненных узлов выполнены с возможностью передачи поисковых импульсов, модулированных идентификационными данными метки, положение которой необходимо найти, в пространство, где располагается по меньшей мере одна метка, имеющая свои идентификационные данные;
причем идентификационные данные по меньшей мере одной метки, положение которой необходимо найти, получают ведущим узлом от устройства пользователя и передают ведущим узлом по меньшей мере двум подчиненным узлам;
причем каждая из по меньшей мере одной метки выполнена с возможностью:
приема поисковых импульсов, модулированных идентификационными данными,
накопления энергии зарядки,
выделения идентификационных данных из поискового импульса, модулированного идентификационными данными,
излучения позиционирующего импульса при определении меткой совпадения принятых идентификационных данных с ее идентификационными данными;
причем каждый из ведущего и подчиненных узлов выполнен с возможностью приема позиционирующего импульса от по меньшей мере одной метки;
причем каждый из по меньшей мере двух подчиненных узлов выполнен с возможностью ретрансляции принятого позиционирующего импульса от по меньшей мере одной метки ведущему узлу;
причем ведущий узел выполнен с возможностью приема от по меньшей мере одного из по меньшей мере двух подчиненных узлов позиционирующего импульса от метки;
причем ведущий узел выполнен с возможностью расчета положения в пространстве метки, положение которой необходимо найти, по полученным ретранслированным позиционирующим импульсам от по меньшей мере двух подчиненных узлов и по полученным позиционирующим импульсам от по меньшей мере одной метки, положение которой необходимо найти;
причем ведущий узел выполнен с возможностью отправки информации о положении в пространстве метки, положение которой необходимо найти, в устройство пользователя.
2. Система локального позиционирования по п. 1, в которой ведущий узел включает в себя свой передатчик поискового импульса, модулированного идентификационными данными, микроконтроллер ведущего узла, позиционирующий приемник ведущего узла, интерфейс для связи с пользователем, антенну ведущего узла, ретрансляционный приемник, причем антенна связана с ретрансляционным приемником, передатчиком поискового импульса и позиционирующим приемником ведущего узла, ретрансляционный приемник связан с микроконтроллером, передатчик поискового импульса связан с микроконтроллером, позиционирующий приемник ведущего узла связан с микроконтроллером, микроконтроллер связан с интерфейсом для связи с пользователем.
3. Система локального позиционирования по п. 2, в которой подчиненный узел включает в себя свой передатчик поискового импульса, микроконтроллер подчиненного узла, позиционирующий приемник подчиненного узла, ретрансляционный передатчик, антенну, причем
антенна связана с ретрансляционным передатчиком, передатчиком поискового импульса и позиционирующим приемником подчиненного узла, ретрансляционный передатчик связан с микроконтроллером, передатчик поискового импульса связан с микроконтроллером, позиционирующий приемник подчиненного узла связан с микроконтроллером.
4. Система локального позиционирования по любому из пп. 1-3, в которой позиционирующие приемники являются детекторами огибающей импульса.
5. Система локального позиционирования по п. 1, причем ведущий узел связан с каждым из подчиненных узлов по проводной или беспроводной связи.
6. Система локального позиционирования по п. 3, в которой метка включает в себя харвестер, позиционирующий передатчик, антенну, микроконтроллер.
7. Система локального позиционирования по п. 6, причем харвестер включает в себя выпрямитель, накопитель энергии, пороговое устройство, причем выпрямитель связан с пороговым устройством и накопителем энергии, пороговое устройство связано с микроконтроллером, антенна связана с выпрямителем и позиционирующим передатчиком, микроконтроллер связан с позиционирующим передатчиком, причем
накопитель энергии выполнен с возможностью передачи энергии на микроконтроллер и позиционирующий передатчик.
8. Система локального позиционирования по п. 7, причем накопитель энергии представляет собой конденсатор.
9. Система локального позиционирования по п. 7 или 8, причем выпрямитель выполнен с возможностью преобразования радиочастотных колебаний в постоянное напряжение.
10. Способ работы системы локального позиционирования, содержащий этапы, на которых:
а) ведущий узел получает команду от пользователя на поиск по меньшей мере одной метки, имеющей свои идентификационные данные, положение которой необходимо найти;
б) ведущий узел выдает команду связанным с ним по меньшей мере двум подчиненным узлам на поиск указанной по меньшей мере одной метки, положение которой необходимо найти, причем команда содержит идентификационные данные метки, положение которой необходимо найти;
в) ведущий узел и по меньшей мере два подчиненных узла посылают поисковые импульсы, модулированные идентификационными данными метки, положение которой необходимо найти, в пространство, где располагается по меньшей мере одна метка;
г) по меньшей мере одна метка принимает по меньшей мере один поисковый импульс, модулированный идентификационными данными,
причем метка, принявшая поисковый импульс, модулированный идентификационными данными:
накапливает энергию принятого поискового импульса в качестве энергии зарядки,
выделяет идентификационные данные из поискового импульса, модулированного идентификационными данными,
определяет, совпадают ли идентификационные данные с ее идентификационными данными,
отправляет в пространство позиционирующий импульс при определении совпадения принятых идентификационных данных с ее идентификационными данными;
д) ведущий узел и по меньшей мере два подчиненных узла принимают позиционирующий импульс;
причем подчиненный узел ретранслирует принятый позиционирующий импульс ведущему узлу;
е) ведущий узел рассчитывает положение в пространстве метки, положение которой необходимо найти, по полученным ретранслированным позиционирующим импульсам и по полученному позиционирующему импульсу от по меньшей мере одной метки, положение которой необходимо найти;
ж) ведущий узел отправляет информацию о положении в пространстве метки, положение которой необходимо найти, в устройство пользователя.
11. Способ работы системы локального позиционирования по п. 10, в котором этап (е) содержит подэтапы, на которых:
ведущий узел измеряет разность времен прихода позиционирующего импульса во все пары ведущий узел - подчиненный узел;
с помощью измеренных разностей времен прихода позиционирующего импульса ведущий узел вычисляет координаты метки в пространстве относительно системы координат, привязанной к узлам и с началом координат, связанным с ведущим узлом.
12. Способ работы системы локального позиционирования по п. 10, в котором для улучшения точности определения положения метки этапы (а)-(д) повторяются многократно.
13. Метка для системы локального позиционирования, содержащая:
антенну, выполненную с возможностью приема энергии для зарядки из окружающей среды или поискового импульса, модулированного идентификационными данными;
харвестер, связанный с микроконтроллером;
позиционирующий передатчик;
причем антенна связана с харвестером и позиционирующим передатчиком, микроконтроллер связан с позиционирующим передатчиком;
харвестер выполнен с возможностью:
накопления энергии, полученной от поискового импульса или из окружающей среды,
выделения идентификационных данных из поискового импульса, модулированного идентификационными данными,
передачи выделенных идентификационных данных на микроконтроллер;
микроконтроллер выполнен с возможностью:
определения, совпадают ли полученные выделенные идентификационные данные с идентификационными данными метки,
выдачи команды позиционирующему передатчику на формирование позиционирующего импульса;
позиционирующий передатчик выполнен с возможностью формирования позиционирующего импульса и передачи его к антенне;
антенна выполнена с возможностью излучения позиционирующего импульса.
14. Метка для системы локального позиционирования по п. 13, в которой харвестер включает в себя:
выпрямитель;
накопитель энергии;
пороговое устройство;
причем выпрямитель выполнен с возможностью приема энергии от антенны, преобразования энергии в энергию постоянного тока и передачи энергии в накопитель энергии;
накопитель энергии выполнен с возможностью накопления и сохранения энергии;
пороговое устройство выполнено с возможностью выделения идентификационных данных из поискового импульса, модулированного идентификационными данными, и их передачи микроконтроллеру.
15. Метка для системы локального позиционирования по п. 13 или 14, в которой накопительное устройство представляет собой конденсатор.
16. Способ работы метки для системы локального позиционирования, содержащий этапы, на которых:
антенна принимает энергию для зарядки из окружающей среды или поисковый импульс, модулированный идентификационными данными метки, которую необходимо найти;
харвестер заряжается, накапливая энергию, полученную от поискового импульса, модулированного идентификационными данными метки, которую необходимо найти, или из окружающей среды, выделяет идентификационные данные из поискового импульса, модулированного идентификационными данными метки, которую необходимо найти, передает выделенные идентификационные данные на микроконтроллер;
микроконтроллер определяет, совпадают ли идентификационные данные с идентификационными данными метки, которую необходимо найти, выдает команды позиционирующему передатчику на формирование позиционирующего импульса, если идентификационные данные метки, которую необходимо найти, совпадают с идентификационными данными данной метки;
если идентификационные данные метки, которую необходимо найти, совпадают с идентификационными данными данной метки:
позиционирующий передатчик формирует позиционирующий импульс и передает его к антенне, и антенна излучает позиционирующий импульс, при этом харвестер разряжается.
17. Способ по п. 16, причем если идентификационные данные не совпадают с идентификационными данными метки, харвестер сохраняет зарядку.
18. Способ по п. 16 или 17, в которой накопительное устройство представляет собой конденсатор.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Приспособление для останова мюля Dobson аnd Barlow при отработке съема | 1919 |
|
SU108A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

