Изобретение относится к способам определения местоположения (локального позиционирования) мобильного узла-нарушителя информационной безопасности в мобильной системе передачи данных, когда имеется какая-то контролируемая территория или ограниченный объем закрытых пространств внутри зданий, помещений, тоннелей, шахт и т.д., с неограниченным и постоянно меняющимся количеством мобильных узлов.
Определение местоположения узла-нарушителя информационной безопасности в мобильных системах передачи данных значительно сокращает время пресечения деструктивной деятельности нарушителя и повышает защищенность данных, в том числе их доступность, достоверность и целостность для легитимных пользователей.
В качестве мобильной системы передачи данных могут рассматриваться децентрализованные беспроводные сети, которые не имеют постоянной структуры. Мобильные узлы соединяются «на лету», образуя сеть, и каждый узел отправляет данные, предназначенные для других узлов. Например, это сети ZigBee, Bluetooth, Wi-Fi, WiMax, Adhoc или сети MANET (мобильная одноранговая беспроводная сеть «Adhoc») и др. Такие беспроводные сети являются самоорганизующимися, с переменной топологией и в них отсутствует четкая инфраструктура, связующая мобильные объекты.
Мобильные системы передачи данных могут быть использованы для передачи персональных данных, сведений банковских сервисов и другой конфиденциальной информации, что требует обеспечения в данных сетях информационной безопасности и достоверности передаваемых сведений. С этой целью в мобильных сетях передачи данных широко внедряются системы предупреждения вторжений (network intrusion detection systems - NIDS), которые при анализе трафика на контролируемой территории выявляют узел, являющийся нарушителем (или ретранслятором узла-нарушителя). Однако, помимо факта обнаружения вторжения узла-нарушителя в мобильных сетях передачи данных необходимо локализовать его местоположение на контролируемой территории для принятия мер по его задержанию, локализации или сопровождению.
Предлагаемый способ определения местоположения мобильного узла-нарушителя в мобильной системе передачи данных должен быть реализован как составная часть NIDS, и к нему должен предъявляться ряд требований, значительно отличающих предлагаемый способ от существующих технических решений. В частности, при локальном позиционировании узла-нарушителя информационной безопасности в мобильных системах передачи данных:
- не должны использоваться для мобильных узлов-клиентов (потенциальных нарушителей) какие-либо дополнительные программно-аппаратные средства, которые могли бы демаскировать перед нарушителем использование NIDS;
- не должно с мобильными узлами-клиентами проводиться какого-либо дополнительного информационного обмена и запросов данных вне стандартных процедур, которые могли бы демаскировать перед нарушителем использование NIDS.
Демаскирование перед нарушителем использования системы предупреждения вторжений позволит нарушителю свернуть свою деятельность, либо перестроить свой адрес в мобильной системе, или саботировать (или подменить) данные информационных запросов внешних (по отношению к NIDS) специализированных систем локального позиционирования. В большинстве имеющихся вариантов технических решений по обеспечению локального позиционирования в помещениях, мобильный узел, чье местоположение определяется, сам вычисляет свое положение и передает его по сети, а задача позиционирования является навигационной задачей. Для определения местоположения узла-нарушителя должны использоваться только показания узлов-сенсоров системы обнаружения вторжений о своем местоположении и уровнях сигналов узла-нарушителя на узлах-сенсорах, таким образом, задача позиционирования является задачей пассивной радиолокации.
В настоящее время из уровня техники известно, что для обеспечения локального позиционирования мобильных объектов внутри помещений могут быть использованы следующие технические решения: - радиочастотные методы позиционирования; - технологии инерциального позиционирования (IMU); -технологии, основанные на изменении магнитного поля; - оптические методы позиционирования; - ультразвуковые методы позиционирования; комбинированные (совмещенные вышеперечисленные методы позиционирования).
Учитывая требование не использования дополнительных программно-аппаратных средств можно остановиться только на радиочастотных методах позиционирования. Известна технология разностно-дальномерного метода (Time Difference of Arrival - TDOA). Данный метод основан на измерении времени распространения сигнала от источника радиоизлучения (ИРИ) до приемника так, чтобы на его основе можно было рассчитать расстояние между источником радиоизлучения и приемником. Известен метод АоА (angle of arrival), который основан на определении направления на источник сигнала. Для этого используются базовые станции (БС), снабженные несколькими антеннами, вращающейся антенной или фазированной антенной решеткой. Получив направление на источник сигнала от БС, можно определить место его нахождения. Чем больше количество БС, тем точнее можно определить эту зону. Известен метод ToA (time of arrival) основан на измерении задержки распространения радиосигнала между мобильным устройством и БС. Мобильное устройство отправляет сигнал в точно известное БС время. БС измеряет временной интервал между отправкой сигнала мобильным устройством и получением его. Метод ToF (time of flight) основан на измерении времени, которое тратит электромагнитная волна на преодоление расстояния между БС до мобильного устройства и возвращения к БС после его отражения от мобильного устройства. Кроме того существуют способы TWR (two-way ranging) и SDS-TWR (symmetrical double-sided two-way ranging). Все данные методы используют дополнительное оборудование или измеряют временные интервалы с высокой точностью, что в условиях переотражений в помещении выполнить весьма сложно, и требуют синхронизации времени между всеми мобильными устройствами. Известна технология NFER, near-field electromagnetic ranging - метод измерения расстояния в ближнем электромагнитном поле, где существует сдвиг фаз между электрической и магнитными компонентами электромагнитной волны. Такой метод требует сложных антенн и дополнительных передатчиков.
Для измерения времени сигналов используют технологии CSS (Chirp Spread Spectrum) - использование коротких ЛЧМ импульсов и SDS-TWR (Symmetrical Double-Sided Two Way Ranging) - симметричное двухстороннее двунаправленное измерение расстояния. Наибольшее распространение получили системы позиционирования с использованием пассивных радиочастотных идентификаторов (RFID) и с использованием активных RFID, в том числе со сверхширокополосными СВЧ сигналами. Но использование данных технологий требуют оснащения объекта дополнительными техническими средствами.
Известно устройство (RU 108184 U1 G08B 19/00, G06K 7/10 опуб. 10.09.2011) локального позиционирования персонала на крупных техногенных объектах, содержащая устройство контроля и группу радиомаяков-идентификаторов, отличающаяся тем, что введены, по крайней мере, три измерительных приемопередающих устройства, соединенных по радиоканалу приема с группой радиомаяков-идентификаторов и измеряющих расстояние до соответствующих радиомаяков-идентификаторов по уровню принимаемого от них сигнала, а по каналу передачи - соединенных с устройством контроля, определяющим местоположение персонала на объекте, причем, по крайней мере, три измерительных приемопередающих устройства разнесены по площади объекта, а радиомаяки-идентификаторы установлены на персонале.
Известны способы (RU 2657185 U1 H04W 80/00, G01S 5/18 опуб. 08.06.2018 и US 2009/0143080 А1 опуб. 04.06.2009). Описанная в данных способах система локального позиционирования содержит ведущий узел, по меньшей мере два подчиненных узла, по меньшей мере одну метку, имеющую свои идентификационные данные. Способ работы системы локального позиционирования содержит этапы, на которых ведущий узел получает команду от пользователя на поиск метки; ведущий узел и подчиненные узлы посылают поисковые импульсы, модулированные идентификационными данными метки; метка принимает поисковый импульс, накапливает энергию принятого поискового импульса и отправляет в пространство позиционирующий импульс. При определении совпадения принятых идентификационных данных с ее идентификационными данными, ведущий узел рассчитывает положение метки в пространстве по принятым позиционирующим импульсам.
Известен способ (RU 2327224 С1 G08G 1/123, G08B 25/10, Н04В 14/04 опуб. 20.06.2008). Согласно данному способу, радиомаяками, установленными на объектах радиомониторинга, периодически излучается в радиоэфир сигналы с кодовыми сообщениями, содержащими маркер, адрес, информацию и контрольную сумму. Указанные сигналы принимаются базовыми станциями, и на каждой из них осуществляется первичная обработка принятых сообщений, при которой демодулируют принятый сигнал. Полученную информацию передают в центр сбора и обработки информации, где осуществляют ее вторичную обработку. Сигналы радиомаяков формируют в виде hopping-сообщений, представляющих собой последовательности радиоимпульсов постоянной продолжительности со скачкообразно изменяющимися перед передачей каждого сообщения частотой радиоимпульса и интервалом между концом и началом следующих друг за другом радиоимпульсов, устанавливаемых с помощью генератора случайных чисел.
Известен способ (RU 644762 С1 G01S 5/04 опуб. 14.02.2018) пространственной селекции расстояний при решении задачи позиционирования мобильного средства дальномерным методом в наземной локальной радионавигационной системе. Известен комбинированный способ (RU 62609582 С1 G01S 5/18 опуб. 02.02.2017), в котором система локального позиционирования объектов содержит идентификаторы и устройство контроля, при этом в устройство контроля входит блок контроля, приемо-передающие устройства, расположенные на известном расстоянии друг от друга и вычислительное устройство. Идентификаторы установлены на объектах и соединены по радиоканалу приема и ультразвуковому каналу передачи с приемо-передающими устройствами, которые по шине управления и шине данных соединены с вычислительным устройством. Местоположение объектов определяется по времени задержки распространения ультразвукового сигнала относительно радиосигнала.
Известен способ (RU 2597885 С2 G01S 5/14, H04W 4/02, H04W 64/00, H04W 48/04, опуб. 27.06.2015). Техническим результатом в предлагаемом способе является обеспечение возможности управления компонентами мобильных клиентских терминалов на основании их местоположения. Для этого осуществляют предоставление мобильному клиентскому терминалу набора данных картирования, который определяет несколько физических местонахождений нескольких маячных устройств и получение в мобильном клиентском терминале отличительных сигналов, передаваемых с маячных устройств. Затем осуществляют извлечение из каждого отличительного сигнала идентификатора маячного устройства из нескольких маячных устройств, сопоставление идентификатора и одного из нескольких физических местонахождений, используя набор данных картирования и определение по сопоставлению местонахождения мобильного клиента.
Существует способ (RU 2512126 С2 H04W 64/00 опуб. 10.04.2014) в котором техническим результатом является получение оценки местоположения мобильного устройства в среде внутри помещения. Для этого определяют информацию о местоположении мобильного устройства, на основании сигналов, принятых мобильным устройством, передают ее на один или более первых сетевых элементов и на ее основании принимают от вторых сетевых элементов информацию, относящуюся к контекстной информации о внутренности помещения для среды внутри помещения. Данная информация включает в себя идентифицирующую позицию одной или более первых беспроводных точек доступа в среде внутри помещения. Кроме того, определяют позиции вторых беспроводных точек доступа, не включенных в контекстную информацию о внутренности помещения, обновляют контекстную информации о внутренности помещения, для включения позиций вторых беспроводных точек доступа, и посылают ее вторым сетевым элементам. Затем получают оценку местоположения мобильного устройства на основании информации, относящейся к его местоположению, и обновленной контекстной информации о внутренности помещения.
Однако, все вышеперечисленные способы предусматривают оснащение объекта дополнительными техническими средствами и введение в информационный обмен с позиционируемым мобильным устройством дополнительной служебной информации, что недопустимо по отношению к узлу-нарушителю при использовании системы предупреждения вторжений.
Учитывая требования к способу локализации местоположения узла-нарушителя NIDS, наиболее приемлемым способом является метод, основанный на измерении уровня мощности сигнала RSSI (received signal strength indicator). Данный метод позволяет определить местоположение устройства, основываясь на уровне сигнала, полученного узлами-сенсорами NIDS от мобильного узла-нарушителя. Для использования этого метода применяется либо преобразование уровня мощности сигнала в расстояние, либо в соответствии с картами покрытия [1, 2].
Наиболее близкими аналогами к предлагаемому техническому решению являются устройства, описанные в патентах RU 2571825 С1, H04W 64/00 опуб. 20.12.2015 и RU 2487498 С2, H04W 64/00 опуб. 10.07.2013. Первый способ «Способ и система обеспечения уточненной информации о местоположении для беспроводных мобильных устройств» предусматривает способы, устройства и системы для создания уточненной информации о местоположении на мобильном устройстве или о мобильном устройстве, которые могут включать в себя решения, основанные на гибридной латерации и/или трилатерации, в которых мобильное устройство выполняет определяющие местоположение вычисления самостоятельно или с помощью или поддержкой сетевых компонентов или глобальной системы позиционирования (GPS/ГЛОНАСС). Мобильные устройства могут автоматически образовывать группы, основанные на близости и/или могут быть сгруппированы вместе через сетевой сервер. Второй способ «Усовершенствованное определение местонахождения в помещении» предполагает, что система определения местонахождения в помещении содержит множество передающих узлов, размещенных в разных положениях в окружающей среде в помещении и сконфигурированных с возможностью передавать РЧ сигналы. Электронное мобильное устройство, координаты которого определяются, сконфигурировано с возможностью принимать РЧ сигналы от передающих узлов. Система определения местонахождения в помещении сконфигурирована с возможностью работать в режиме обучения, в котором опорные величины вычисляются на основе мощностей РЧ сигналов, принятых от передающих узлов в разных опорных положениях в окружающей среде в помещении.
Однако, оба эти способа, в отличие от предлагаемого технического решения, предназначены для решения навигационной задачи на мобильном устройстве. Принципиальными отличиями предлагаемого технического решения от наиболее близких аналогов являются следующие факторы:
- в предлагаемом техническом решении используется преобразование уровня мощности сигнала в расстояние, а для аналогов в соответствии с картами покрытия;
- отсутствует какой-либо дополнительный (вне форматов системы передачи данных) информационный обмен между узлом-нарушителем и узлами-сенсорами системы обнаружения вторжений;
- предполагается, что узлы-сенсоры системы обнаружения вторжений могут быть не только стационарными, но и мобильными;
- учитывается возможность изменения уровня мощности передатчика узла-нарушителя (т.е. измерения проводятся в условиях априорной неопределенности о мощности передатчика узла-нарушителя);
- предлагается критерий выбора оптимального из всех наборов (кортежей) возможных пространств «пересечения» геометрического места точек возможного местоположения узла-нарушителя;
- предлагается специализированный порядок выполнения действий во времени при функционировании системы локального позиционирования мобильного узла-нарушителя, содержащий процедуры создания базы данных калибровочных измерений (обучения) и определения координат узла-нарушителя.
Задача, на решение которой направлено заявленное техническое решение заключается в обеспечении информационной безопасности в мобильных системах (сетях) передачи данных, путем использования способа локального позиционирования мобильного узла-нарушителя информационной безопасности в системе предупреждения вторжений.
Пусть в мобильной сети передачи данных действует система предупреждения вторжений (NIDS), которая состоит из центрального мобильного узла-координатора, который принимает решение о попытке вторжения (атаки) на основе анализа данных, поступающих с мобильных узлов-сенсоров (датчиков), анализирующих общий сетевой трафик в зоне приема своего мобильного узла. Все мобильные узлы-сенсоры системы NIDS либо являются стационарными с точно известными координатами, либо используется геолокация GPS/ГЛОНАС (для открытых территорий), либо помещение оборудовано вспомогательной системой локального позиционирования (но только для определения местоположения мобильных узлов-сенсоров NIDS). Вспомогательная система локального позиционирования используется только для решения навигационной задачи позиционирования узлов-сенсоров NIDS и не участвует в информационном обмене с узлом-нарушителем.
Мобильные узлы-сенсоры постоянно передают информацию о своем местоположении в формате протокола передачи данных NIDS на центральный узел NIDS. Количество мобильных узлов-сенсоров NIDS (контролирующих узлов) должно быть минимально таким, чтобы каждая точка контролируемой территории находилась в зоне действия как минимум двух, или больше мобильных узлов-сенсоров NIDS, и трафик от любого мобильного узла на контролируемой территории подвергался бы проверке. Соответственно данному правилу должна соответствовать и тактика передвижения мобильных узлов-сенсоров NIDS.
Для описания уровня мощности сигнала (показатель качества связи) от мобильного узла в дальней зоне (для высокочастотного диапазона действия беспроводных сетей) можно воспользоваться следующим соотношением.
 где AПР - уровень мощности сигнала от мобильного узла; РПРД - мощность сигнала передатчика мобильного узла; РПРМ - чувствительность приемника мобильного узла-приемника; GПРД - коэффициент усиления антенны (направленные свойства) мобильного узла-передатчика; GПРМ - коэффициент усиления антенны (направленные свойства) мобильного узла-приемника; d - расстояние от узла-приемника до узла -передатчика.
где AПР - уровень мощности сигнала от мобильного узла; РПРД - мощность сигнала передатчика мобильного узла; РПРМ - чувствительность приемника мобильного узла-приемника; GПРД - коэффициент усиления антенны (направленные свойства) мобильного узла-передатчика; GПРМ - коэффициент усиления антенны (направленные свойства) мобильного узла-приемника; d - расстояние от узла-приемника до узла -передатчика.
Все узлы-сенсоры постоянно передают на узел-координатор NIDS данные о своем местоположении. Поэтому, будем полагать, что в любой момент времени координаты всех узлов-сенсоров и узла-координатора известны в какой-то локальной системе координат XOY связанной с контролируемой территорией. Задача системы NIDS состоит не только в выявлении вредоносной активности узла-нарушителя, но и в локализации с приемлемой точностью его местоположения для возможности блокировки, задержания или сопровождения нарушителя. При рассмотрении данной задачи можно с высокой долей вероятности принять следующие допущения:
- скорость информационного обмена между узлами (в том числе и узлами системы NIDS) гораздо выше скорости передвижения мобильных устройств и будем считать, что в промежутке времени между определениями координат (навигационными определениями) изменение местоположения мобильных узлов (в том числе и узла-нарушителя) не превышает погрешности определения координат;
- все узлы системы NIDS обладают одинаковыми характеристиками оборудования по мощности передатчика, чувствительности приемника, направленными свойствами антенны, и др.;
- все узлы системы NIDS функционируют на одной частоте, в едином электромагнитном профиле (в одной электромагнитной обстановке), которая остается неизменной на контролируемой территории в течение времени, необходимого для выявления узла-нарушителя и его локального позиционирования;
- все узлы передачи данных на контролируемой территории (в том числе и узел-нарушитель) открыты для проверки трафика и функционирования NIDS, а появление узла, «закрытого», недоступного для системы NIDS может расцениваться как появление узла-нарушителя (иначе описанную территорию нельзя считать контролируемой NIDS);
- все узлы системы NIDS обладают одинаковыми характеристиками определения местоположения с одинаковой погрешностью по всей площади контролируемой территории;
- поляризационные свойства излучения передатчиков мобильных узлов не учитываются и все узлы системы NIDS и узел-нарушитель имеют изотропные антенны без направленных свойств (GПРД=GПРМ=1);
- для всех мобильных узлов, в т.ч. для узлов NIDS и узла-нарушителя и прочих мобильных узлов параметры РПРМ; РПРД; GПРМ; GПРД=const остаются неизменными за все время определения координат узла-нарушителя;
- при достаточно большом количестве измерений уровней сигналов на входе приемников от различных узлов-сенсоров с их различным местоположением, определяющим фактором уровня мощности сигнала от конкретного узла в общей статистике измерений является дальность между узлами, а не ослабление сигнала при его прохождении через элементы ограждений, строительных конструкций и т.д.;
- учитывая, что скорость информационного обмена между узлами гораздо выше скорости передвижения мобильных устройств, будем полагать, что подавление сигнала при его прохождении через элементы ограждений, строительных конструкций и т.д. будет постоянным за все время определения координат узла-нарушителя. Вследствие этого, подавление сигнала при его прохождении через элементы строительных конструкций можно расценивать как снижение мощности узла-передатчика за все время определения координат узла-нарушителя.
При функционировании системы NIDS, в формате данных информационного обмена между узлами NIDS можно сделать следующие допущения:
- каждый узел-сенсор способен менять с заданной дискретностью уровень (мощность) своего излучения и передавать эту информацию на узел-координатор;
- узел-сенсор способен с определенной точностью синхронизироваться в сети и оценивать уровень принимаемого сигнала от других узлов-сенсоров с точностью, одинаковой для всех узлов NIDS;
- каждый узел-сенсор способен определять идентификационный номер других узлов (в том числе и адрес узла-нарушителя) и передавать на узел-координатор NIDS свои данные о собственном местоположении, уровне сигналов от других узлов-сенсоров и прочие данные, предусмотренные протоколом информационного обмена, а также ретранслировать аналогичные данные других узлов-сенсоров (если они не в зоне действия узла-координатора).
Пусть имеется определенное количество узлов NIDS (в том числе узел-координатор и узлы-сенсоры). При этом принимаемый сигнал одинаково на всех данных узлах ранжируется по уровню мощности на р одинаковых значений от р=1…Р (например, Р=10). Тогда в ходе информационного обмена между узлами, на узел координатор приходит информация об уровнях принимаемых сигналов от всех узлов-сенсоров с точностью, одинаковой для всех узлов NIDS. Это данные можно интерпретировать как матрицу значений Ai:j:
Здесь i;j текущие индексы и индекс i соответствует передающему узлу, а индекс j соответствует принимающему узлу.
Значения элементов данной матрицы соответствуют уровню принимаемых сигналов узлами, т.е. ai;1=1…Р, при этом все элементы ai;1=0 если i=j или между данными узлами нет связи. Стоит отметить, что в силу погрешности измерений и влияния дестабилизирующих факторов в общем случае ai;j≠aj;i.
При информационном обмене на узле-координаторе вместе с информацией об уровнях передаваемых и принимаемых сигналов каждого из узлов-сенсоров собирается информация и о местоположении узлов-сенсоров в системе координат XOY.
В силу этого матрице Ai;j ставится в соответствие матрица Di;j
Здесь di;j измеренная с помощью полученных координат при локальном позиционировании дальность между i и j узлами в метрах. Для декартовой системы координат XOY, связанной с контролируемой территорией будет  Таким образом, каждой градации измерений уровня принимаемого сигнала ставятся в соответствие дальности ai;j|p=1…P≡di;j|p=1…P или Ai;j≡Di;j.
Таким образом, каждой градации измерений уровня принимаемого сигнала ставятся в соответствие дальности ai;j|p=1…P≡di;j|p=1…P или Ai;j≡Di;j.
Для практических задач необходимо набрать большую статистику измерений уровней сигналов для каждой градации (например, для каждого значения Р от 1 до 10 нужно 100 и более измерений). Большое количество измерений уровней принимаемых сигналов (а также измерения для как можно более разнообразных местоположений узлов-сенсоров, для чего необходимо, чтобы они перемещались) для каждой градации, позволит «адаптировать» проводимые измерения к контролируемой территории, и снизить статистическую зависимость измерений от ослабления сигнала при его прохождении через элементы ограждений и строительных конструкций.
Таким образом, необходимо провести большое количество измерений для того, чтобы набрать необходимую статистику измерений уровня мощности принимаемого сигнала для каждой градации. Все узлы-сенсоры, находясь внутри контролируемой территории, генерируют и принимают сигналы друг от друга. Мощность передаваемого сигнала узлов-передатчиков одинакова и по уровню градаций равна 1. Для каждой градации уровня мощности принимаемого сигнала от 1 до Р набирается не менее N значений измерений дальности, из которых определяем среднее значение 
Таким образом, получаем оценочную (градуировочную) таблицу соответствия уровней сигналов на входе узла расстояниям до источника сигнала 
В начальных условиях определялось, что каждый узел-сенсор способен менять с заданной дискретностью уровень (мощность) своего излучения и передавать эту информацию на узел-координатор. Таким образом, мощность излучения одинаково для всех узлов ранжируется по уровню на k значений от k=1…K (например, K=10). Тогда матрица по (1) представляется как матрица, полученная для конкретного значения мощности передачи k (мощность передачи всех узлов-сенсоров одинакова).
Далее, аналогично вышеприведенным рассуждениям, получаем оценочную (градировочную) таблицу соответствия расстояний до источника сигнала от уровней сигналов на входе приемника и уровней мощности излучения передатчика.
Здесь  оценка расстояния между приемником и передатчиком при р-ой градации уровня принимаемого сигнала на приемнике и k-ой градации мощности излучения передатчика.
оценка расстояния между приемником и передатчиком при р-ой градации уровня принимаемого сигнала на приемнике и k-ой градации мощности излучения передатчика.
Погрешности измерений. При проведении измерений для каждой градации уровня мощности принимаемого сигнала от 1 до Р набирается не менее N (например, N не менее 100) значений измерений дальности. Для исключения из результатов измерений промахов (грубых погрешностей измерения) используется критерий В.И. Романовского, когда проверяется выполнение условия 
где  Значение коэффициента tβ является табулированным и в зависимости от доверительной вероятности составляет tβ=1,96 (если проведено более 30 измерений и доверительная вероятность р=0,95); tβ=2,58 (если проведено более 30 измерений и доверительная вероятность р=0,99). Промахи удаляются из результатов измерений, и средние значения
Значение коэффициента tβ является табулированным и в зависимости от доверительной вероятности составляет tβ=1,96 (если проведено более 30 измерений и доверительная вероятность р=0,95); tβ=2,58 (если проведено более 30 измерений и доверительная вероятность р=0,99). Промахи удаляются из результатов измерений, и средние значения  находят уже за исключением промахов.
находят уже за исключением промахов.
При использовании в качестве измерений координат мобильных узлов-сенсоров NIDS геолокации с применением спутниковой навигации (например, на основе GPS/ГЛОНАС для открытых площадок), находим погрешность определения координат δHC. По материалам сайта www.cdcm.ru/smglo/ Российской системы дифференциальной коррекции и мониторинга (СДКМ), точность навигационных определений для наиболее точного случая измерений совмещенных GPS/ГЛОНАСС приемников составляет (среднее значение по станциям слежения) с доверительной вероятностью не менее (р=0,95) по широте 4,53 м, по долготе 3,95 м, по высоте 10,96 м. Кроме того, погрешности по широте и долготе без потери общности можно в рамках ограниченного пространства контролируемой территории считать соответствующей значениям погрешности на плоскости подстилающей поверхности Земли в системе координат XOY. Таким образом, можно полагать, что погрешность определения координат при спутниковых определениях геолокации δНС в системе координат XOY может составлять (наиболее точный случай) от 1,98 до 2,26 метра.
При использовании в качестве измерений координат мобильных узлов-сенсоров NIDS другой вспомогательной системы локального позиционирования, точность определения местоположения узлов-сенсоров можно взять из технических характеристик применяемой системы.
Для нахождения погрешности измерения дальности находим  уже за исключением промахов, находим
уже за исключением промахов, находим  за исключением промахов. Задав доверительную вероятность и величину измерений (за вычетом промахов), по таблице определяется коэффициент Стьюдента. Например, для доверительной вероятности р=0,95 и количества измерений более 60, коэффициент Стьюдента (tp;N) составляет 2,00, а при количестве измерений 120 (tp;N) составляет 1,98; (tp;∞)=1,96. Затем вычисляется абсолютная погрешность результатов измерения:
за исключением промахов. Задав доверительную вероятность и величину измерений (за вычетом промахов), по таблице определяется коэффициент Стьюдента. Например, для доверительной вероятности р=0,95 и количества измерений более 60, коэффициент Стьюдента (tp;N) составляет 2,00, а при количестве измерений 120 (tp;N) составляет 1,98; (tp;∞)=1,96. Затем вычисляется абсолютная погрешность результатов измерения:

Тогда результаты калибровочных измерений (база данных измерений) с учетом их погрешности составляет  при р градаций уровня принимаемого сигнала на приемнике и к градаций мощности излучения передатчика узлов.
при р градаций уровня принимаемого сигнала на приемнике и к градаций мощности излучения передатчика узлов.
Нахождение местоположения нарушителя. Пусть I узлов находятся в зоне радиовидимости нарушителя. Координаты нарушителя (xH;yH), координаты узлов (xi;yi), где i индекс i=1…I. При этом, i - узел принимает сигнал с уровнем (градацией) p(i), тогда расстояние от узла до нарушителя составит  Мощность передатчика нарушителя пока не оценена, поэтому принимаем ее как градацию k=1 (потом в процессе расчетов будем ее менять). Для практических численных расчетов предлагается разбить контролируемую площадь с шагом h Шаг разбиения выбирается из соображений технических свойств рассматриваемой системы мобильной передачи данных и практической необходимости нахождения нарушителя. Например, hx=hy = меняется от 0,5 до 5 метров.
Мощность передатчика нарушителя пока не оценена, поэтому принимаем ее как градацию k=1 (потом в процессе расчетов будем ее менять). Для практических численных расчетов предлагается разбить контролируемую площадь с шагом h Шаг разбиения выбирается из соображений технических свойств рассматриваемой системы мобильной передачи данных и практической необходимости нахождения нарушителя. Например, hx=hy = меняется от 0,5 до 5 метров.
Важно: Шаг разбиения h необходимо выбирать в соответствии с округлением при расчетах и кратным  Кроме того, интервал разбиения должен быть одинаковым при расчетах для всех узлов.
Кроме того, интервал разбиения должен быть одинаковым при расчетах для всех узлов.
Для узла (xi;yi), зная  рассмотрим пространство в координатах XOY.
рассмотрим пространство в координатах XOY.

Дискретизируем контролируемое пространство с шагом h=hx=hy. Пусть l - индекс l=0…L. Тогда границы пространство разбиения будут:

где  Предполагаемый нарушитель с координатами (xH;yH) должен находиться в области пространства, определяемой неравенством:
Предполагаемый нарушитель с координатами (xH;yH) должен находиться в области пространства, определяемой неравенством:

По результатам проверки каждой точки пространства (7) с шагом разбиения h на выполнение неравенства (8) составляется матрица Bi

Каждый элемент данной матрицы bll имеет значение 0 или 1 (0 - неравенства (8) не выполняются и нахождение нарушителя в данной точке не возможно; 1 - неравенства (8) выполняются и нахождение нарушителя в данной точке возможно). При этом матрице Bi вводится в соответствие дискретизированная область пространства Λi для i-го узла.
Таким образом, зная матрицу Bi можно всегда определить область пространства Λi возможного местоположения нарушителя для i-го узла. Если в матрице Bt члены нулевые, то нахождение нарушителя в данной точке не возможно. Далее находим матрицы Bt (и соответственно можем определить все области пространства Λi) для всех I узлов, которые находятся в зоне радиовидимости нарушителя. Все вышеприведенные действия выполнены при условии, что мощность передатчика нарушителя пока не оценена, поэтому принимаем ее как ранжированную по уровню k=1.
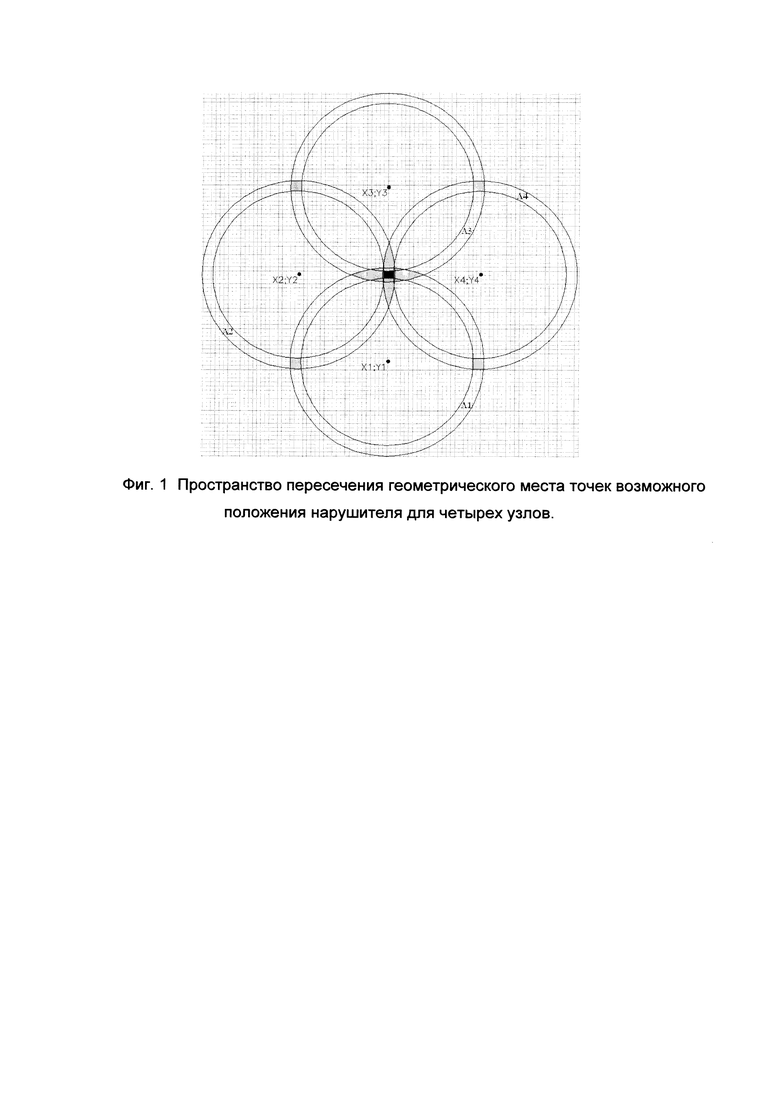
Важно отметить, что для каждого узла, которые находятся в зоне радиовидимости нарушителя уровень мощности передатчика нарушителя может быть разным (от k=1…K) в силу ослабления сигнала при его прохождении через элементы ограждений, строительных конструкций и т.д. Таким образом, для каждого i-го узла определяется набор матриц Bik, которые определяют наборы областей пространств Λik. Для определения местоположения нарушителя определяются наборы вариантов пересечения областей Λik для всех I узлов, которые находятся в зоне радиовидимости нарушителя.

 - набор возможных пространств «пересечения» геометрического места точек возможного положения нарушителя. Здесь f - индекс от 1 до F количество наборов возможных пространств «пересечения» геометрического места точек, при которых пересечение всех узлов возможно
- набор возможных пространств «пересечения» геометрического места точек возможного положения нарушителя. Здесь f - индекс от 1 до F количество наборов возможных пространств «пересечения» геометрического места точек, при которых пересечение всех узлов возможно 
Таким образом, для каждого i-го узла всех I узлов, которые находятся в зоне радиовидимости нарушителя существует свой набор значений k-ой предполагаемой мощности передатчика нарушителя, при которых пространства от всех узлов имеют пересечения. Пример пространства пересечения для четырех узлов показан на Фиг. 1. Для выбора оптимального из всех наборов  возможных пространств «пересечения» геометрического места точек возможного местоположения нарушителя, предлагается использовать следующий критерий.
возможных пространств «пересечения» геометрического места точек возможного местоположения нарушителя, предлагается использовать следующий критерий.
Для  т.е. область пересечения
т.е. область пересечения  будет максимальной, и иметь максимальное количество не нулевых элементов (максимальное количество возможных точек местоположения нарушителя).
будет максимальной, и иметь максимальное количество не нулевых элементов (максимальное количество возможных точек местоположения нарушителя).
После выбора оптимальной области пространства  находится геометрический центр данной области как координаты нарушителя
находится геометрический центр данной области как координаты нарушителя

В случае, если не существует таких наборов возможных пространств «пересечения» геометрического места точек возможного местоположения нарушителя, при которых  необходимо либо уменьшать шаг разбиения пространства h или проводить заново все процедуры калибровочных измерений для получения базы данных измерений
необходимо либо уменьшать шаг разбиения пространства h или проводить заново все процедуры калибровочных измерений для получения базы данных измерений 
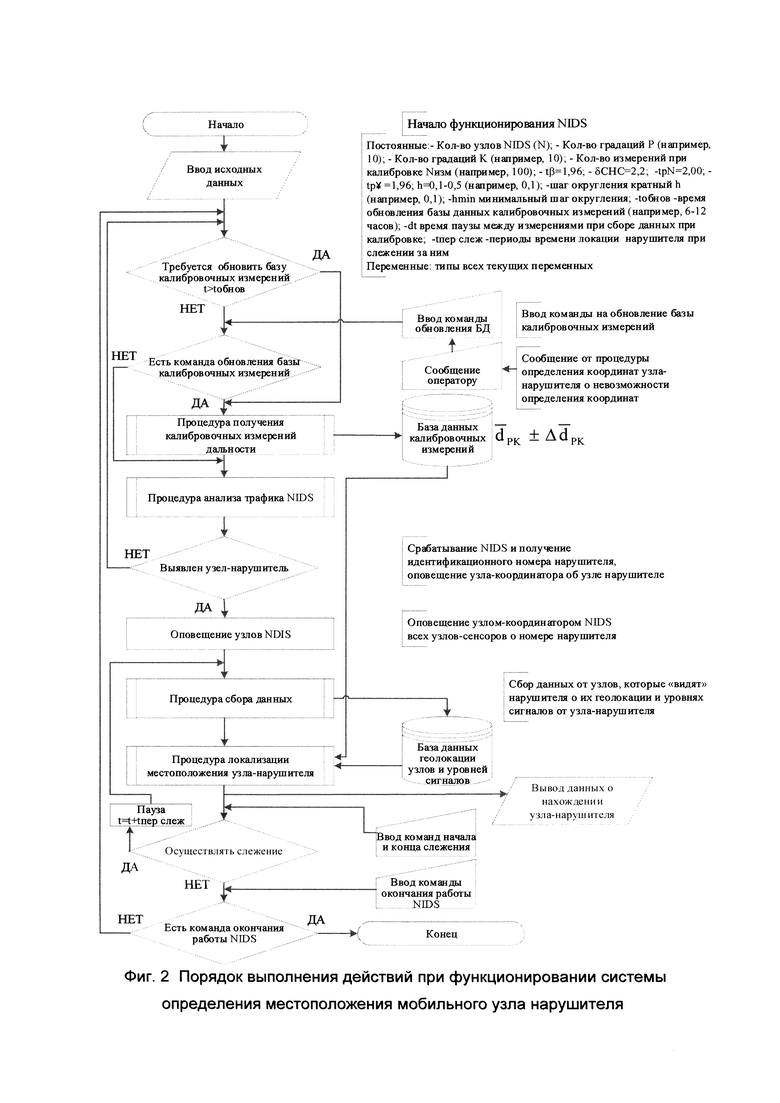
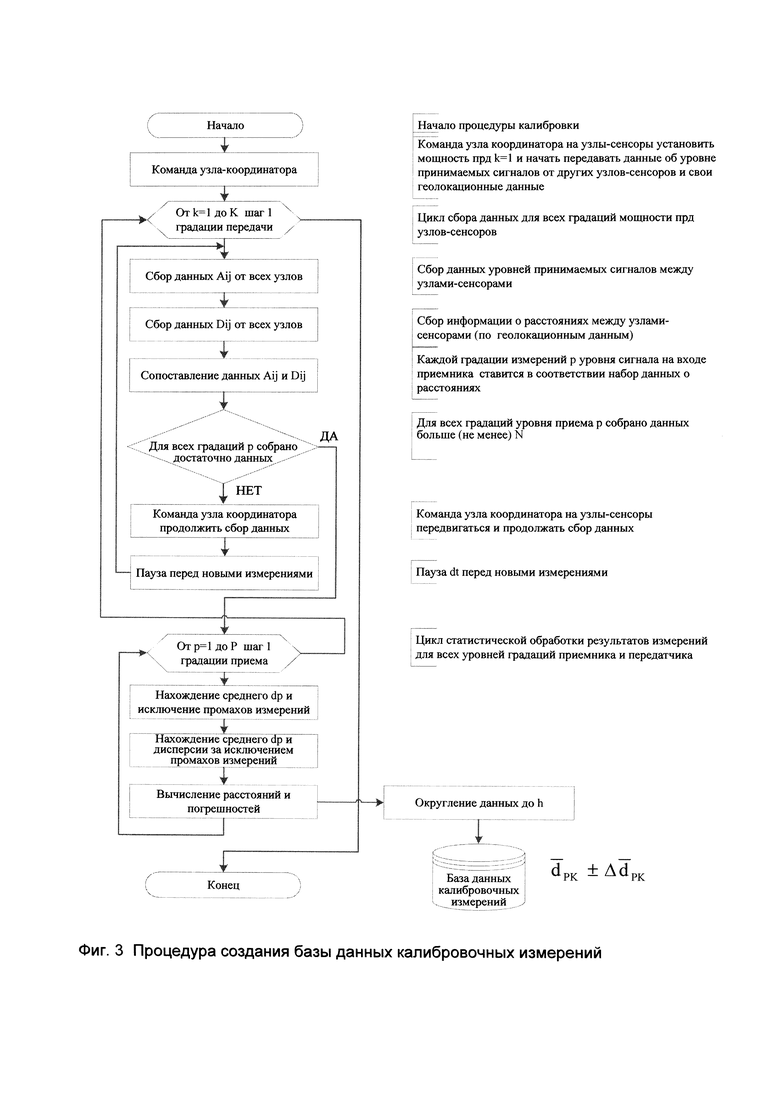
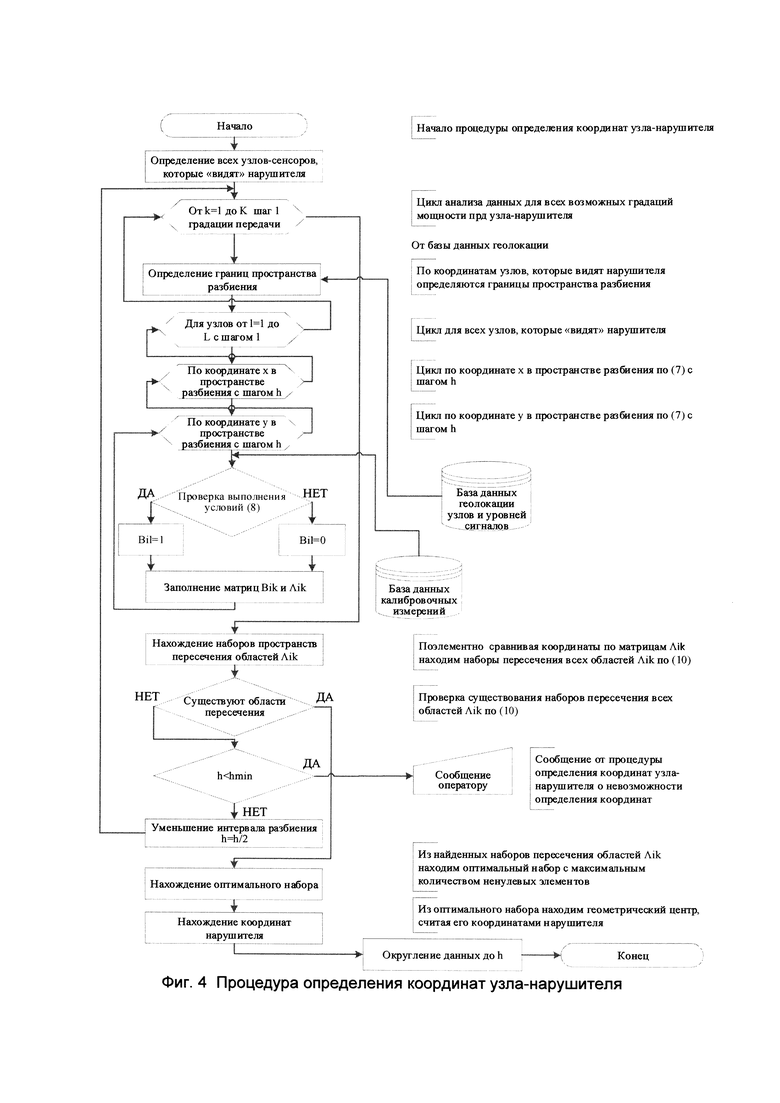
Порядок выполнения во времени процедур функционирования системы определения местоположения мобильного узла нарушителя приведен на Фиг. 2. В его состав входят две базовые процедуры, это приведенная на Фиг. 3 процедура создания базы данных калибровочных измерений (обучения) и приведенная на Фиг. 4 процедура определения координат узла-нарушителя. Часть действий в данных процедурах касается организации информационного обмена (запросы и получение данных) между узлом-координатором и узлами-сенсорами NIDS. При практической реализации данные алгоритмические блоки интегрируются в среду программного обеспечения NIDS в зависимости от типа функционирования, протоколов обмена и других, факторов функционирования NIDS.
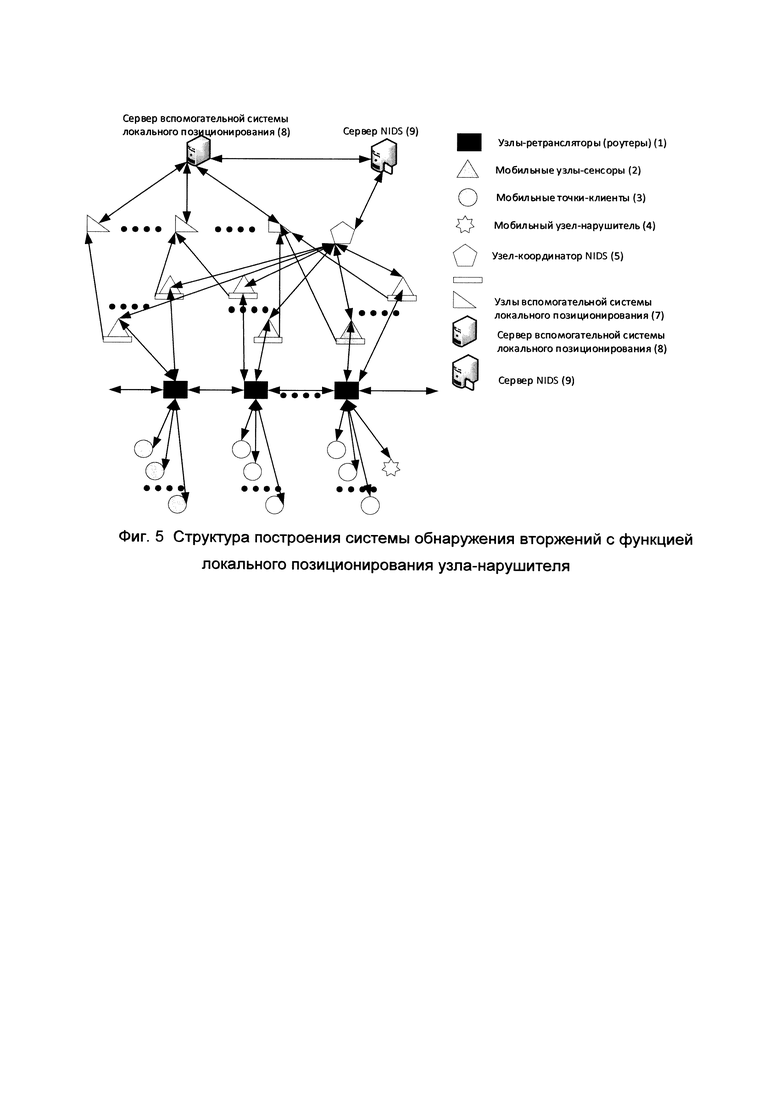
Структурная схема реализации предложенного технического решения приведена на Фиг. 5.
Узлы-ретрансляторы (1) мобильной системы передачи данных (например, роутеры WI-FI) образуют мобильную сеть и к ним подключаются мобильные точки-клиенты (3) сети (в том числе и точка-нарушитель (4)). Кроме того, к узлам-ретрансляторам сети (1) подключаются и узлы-сенсоры (2) системы NIDS. Возможен вариант, когда узел-ретранслятор (1) совмещает в себе узел-сенсор (2). Узлы-сенсоры (2) системы NIDS являются мобильными и на них же размещаются передатчики (радиомаяки) (6) вспомогательной системы локального позиционирования (только для узлов-сенсоров). Передатчики вспомогательной системы локального позиционирования (6) передают информацию на узлы вспомогательной системы локального позиционирования (7), которые, в свою очередь, передают данные на свой сервер (8), а далее на сервер NIDS (9). Таким образом, информация о местоположении мобильных узлов-сенсоров (2) системы NIDS попадает на сервер NIDS (9).
Узлы-сенсоры (2) системы NIDS полностью или выборочно собирают трафик с узлов-ретрансляторов (1) мобильной системы передачи данных и либо сами его анализируют, либо передают для анализа на узел-координатор NIDS (5), а далее на сервер NIDS (9). Возможны и другие, аналогичные варианты структуры построения системы обнаружения вторжений с применением вспомогательной системы локального позиционирования (только для узлов-сенсоров) для обнаружения местоположения узла-нарушителя.
Предложенный способ определения местоположения мобильного узла-нарушителя в системе передачи данных позволяет с высокой точностью локализовать местоположение нарушителя по срабатыванию системы предупреждения вторжений для его задержания, наблюдения или сопровождения.
При практическом использовании предлагаемого способа эффективность его применения зависит от следующих факторов: - исполнения изначально принятых допущений; - количества узлов-сенсоров системы NIDS; - количества принятых градаций уровня приема сигнала узлами-сенсорами и количества принятых градаций возможной мощности передатчика нарушителя; - количества проведенных измерений при начальных калибровках и определении формировании базы данных калибровочных измерений расстояний и погрешностей измерений расстояний; - скорости информационного обмена в сети, ее пропускной способности, формата передачи данных между узлами NIDS; - точности задания координат контролируемой зоны и точности локального позиционирования координат мобильных узлов-сенсоров (характеристик применяемой вспомогательной системы локального позиционирования для мобильных узлов-сенсоров).
Проведенный заявителем анализ уровня техники установил, что аналоги, характеризующиеся совокупностями признаков, тождественных всем признакам заявленного устройства для локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных, при отсутствии дополнительного информационного обмена с узлом-нарушителем и оснащения узла-нарушителя дополнительными программно-аппаратными средствами, кроме стандартного оборудования, необходимого для работы в системе передачи данных отсутствуют, следовательно, заявленное изобретение соответствует условию "новизна".
Результаты поиска известных технических решений в данной и смежных областях техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники.
Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками заявленного изобретения преобразований на достижение указанного технического результата и изобретение не основано на:
- дополнении известного устройства-аналога какой-либо известной частью, присоединенной к нему по известным правилам, для достижения технического результата, в отношении которого установлено влияние именно этого дополнения;
- замене какой-либо части устройства-аналога другой известной частью для достижения технического результата, в отношении которого установлено влияние именно такого дополнения;
- исключении какой-либо части устройства-аналога с одновременным исключением, обусловленной ее наличием функции, и достижением обычного для такого исключения результата;
- увеличении количества однотипных элементов для усиления технического результата, обусловленного наличием в устройстве именно таких элементов;
- выполнении известного устройства-аналога или его части из известного материала для достижения технического результата, обусловленного известными свойствами материала;
- создании устройства, состоящего из известных частей, выбор которых и связь между которыми осуществлены на основании известных правил, и достигаемый при этом технический результат обусловлен только известными свойствами частей этого устройства и связей между ними;
- изменении количественного признака (признаков) устройства и предоставлении таких признаков во взаимосвязи либо изменении вида взаимосвязи, если известен факт влияния каждого из них на технический результат и новые значения этих признаков или их взаимосвязь могли быть получены исходя из известных зависимостей, следовательно, заявленное изобретение соответствует "изобретательскому уровню".
Таким образом, приведенные сведения доказывают, что при осуществлении заявленного изобретения выполняются следующие условия:
- предлагаемое устройство при его осуществлении, предназначено для использования в системах предупреждения вторжений для мобильных систем (сетей) передачи данных;
- для заявленного изобретения в том виде, как оно охарактеризовано в независимом пункте формулы изобретения, подтверждена возможность его осуществления с помощью описанных или других известных до даты подачи заявки средств;
- средство, воплощающее заявленное изобретение при его осуществлении, способно обеспечить получение указанного технического результата.
Следовательно, заявленное изобретение соответствует условию патентоспособности "промышленная применимость".
Исследование выполнено авторами в рамках в рамках выполнения государственного задания Владимирского государственного университета FZUN-2020-0013.
Источники информации:
1. Воронов Р.В., Малодушев С.В. динамическое создание карт уровня wifi-сигналов для систем локального позиционирования // Системы и средства информатики 2014. т. 24, №1. С. 80-92.
2. Воронов Р.В., Мощевикин А.П. Применение условной энтропии при формировании рекомендаций по размещению базовых станций в локальных системах позиционирования // Информационные технологии 2014. №10, С. 11-17.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ | 2022 |
|
RU2793202C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ТЕХНИЧЕСКИХ СРЕДСТВ ОХРАНЫ | 2010 |
|
RU2427039C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ С ОДНОРАНГОВОЙ ИНФОРМАЦИОННОЙ СЕТЬЮ | 2016 |
|
RU2636012C1 |
| СПОСОБ РАСПРЕДЕЛЕННОЙ БАЛАНСИРОВКИ ТРАФИКА В БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2013 |
|
RU2528415C1 |
| ЛОКАЛИЗАЦИЯ, ОСНОВАННАЯ НА СЕТИ ИЗ БЕСПРОВОДНЫХ УЗЛОВ | 2015 |
|
RU2695510C2 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов и контроля за прилегающей территорией | 2019 |
|
RU2724805C1 |
| ВЫСОКОТОЧНАЯ СИСТЕМА ЛОКАЛЬНОГО ПОЗИЦИОНИРОВАНИЯ | 2017 |
|
RU2657185C1 |
| Радиолокационно-лучевая система охраны периметров протяженных объектов | 2019 |
|
RU2720552C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Устройство защиты акустической информации от высокочастотного навязывания по радиоканалу | 2019 |
|
RU2711211C1 |
Изобретение относится к способам локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных на контролируемой территории или в закрытых помещениях, шахтах, тоннелях, с неограниченным и постоянно меняющимся количеством мобильных узлов. Способ локального позиционирования узла-нарушителя реализуется в устройствах системы обнаружения вторжений (NIDS) для обеспечения информационной безопасности в мобильных системах передачи данных. Для реализации позиционирования узла-нарушителя в закрытых помещениях используются мобильные узлы-сенсоры, местоположение которых в любой момент времени точно известно и которые способны менять с заданной дискретностью уровень (мощность) своего излучения и передавать эту информацию на узел-координатор, с определенной точностью синхронизироваться в сети и оценивать уровень принимаемого сигнала от других узлов-сенсоров с точностью, одинаковой для всех узлов NIDS. Узлы-сенсоры определяют идентификационные номера (адреса) других узлов (в том числе и адрес узла-нарушителя) и передают на узел-координатор данные о собственном местоположении, уровне сигналов от других узлов-сенсоров и прочие данные, предусмотренные протоколом информационного обмена, а также ретранслируют аналогичные данные от других узлов-сенсоров (если они не в зоне действия узла-координатора). При этом с узлом-нарушителем не ведется какой-либо дополнительный информационный обмен и не запрашиваются данные о его местоположении. Кроме того, априорно не известна мощность передатчика мобильного устройства нарушителя. Предлагаемый способ основан на использовании многократных измерений уровня мощности сигнала RSSI, полученного узлами-сенсорами NIDS друг от друга для различных градаций уровня принимаемого сигнала и градаций уровня мощности передатчиков, с последующим преобразованием уровней сигналов в расстояние, для электромагнитного профиля топологии контролируемого помещения на частоте работы мобильной сети передачи данных. Собранные данные статистически обрабатываются, исключаются промахи измерений, оценивается погрешность измерений, и составляются базы данных калибровочных измерений, по которым оценивается расстояния и абсолютные погрешности определения расстояний. При определении местоположения узла-нарушителя с использованием метода трилатерации из всех узлов, которые «видят» нарушителя определяют возможные наборы областей пространств (по расстояниям из базы данных калибровочных измерений) «пересечения» геометрического места точек возможного местоположения нарушителя от разных мобильных узлов-сенсоров. 5 ил.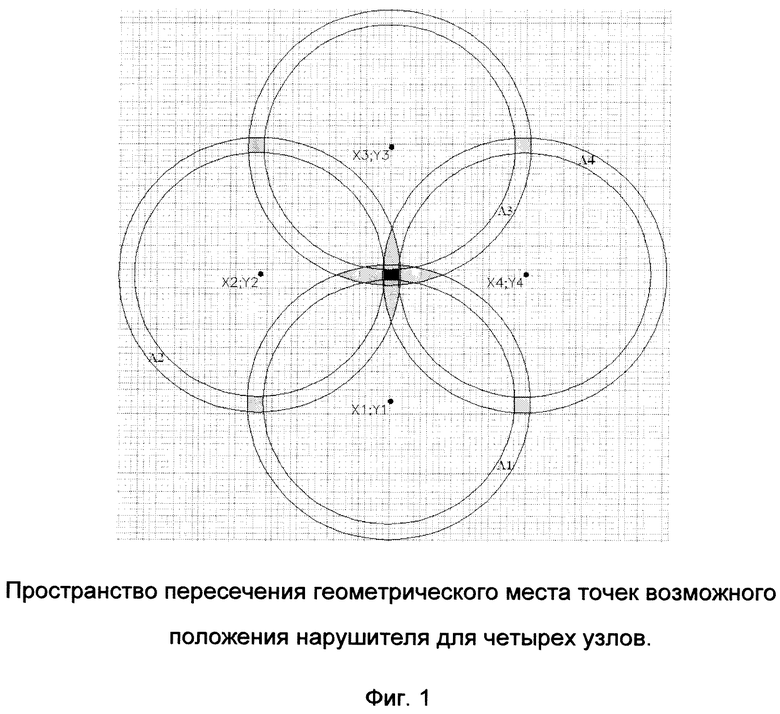
Способ локального позиционирования узла-нарушителя информационной безопасности в мобильных системах передачи данных на контролируемой территории или в закрытых помещениях, реализуемый в устройствах системы обнаружения вторжений - NIDS, отличающийся тем, что используется структура построения системы обнаружения вторжений, когда узлы-ретрансляторы (1) роутеров WI-FI образуют мобильную сеть, к ним подключаются мобильные узлы-клиенты (3) сети, в том числе и узел-нарушитель (4), кроме того, к узлам-ретрансляторам сети (1) подключаются узлы-сенсоры (2) системы NIDS, которые являются мобильными, и на них же размещаются передатчики (6) вспомогательной системы локального позиционирования (только для узлов-сенсоров), при этом данные передатчики (6) передают информацию на узлы вспомогательной системы локального позиционирования (7), которые, в свою очередь, передают данные на свой сервер (8), а далее на сервер NIDS (9), таким образом, информация о местоположении мобильных узлов-сенсоров (2) системы NIDS попадает на сервер NIDS (9), а узлы-сенсоры (2) системы NIDS полностью или выборочно собирают трафик с узлов-ретрансляторов (1) мобильной системы передачи данных и либо сами его анализируют, либо передают для анализа на узел-координатор NIDS (5), а далее на сервер NIDS (9), при этом с узлом-нарушителем не ведется какой-либо дополнительный информационный обмен, не предусмотренный системой передачи данных, и не запрашиваются данные о его местоположении, кроме того, априорно не известна мощность передатчика мобильного устройства нарушителя, а для определения координат узла-нарушителя используются многократные измерения уровня мощности сигнала RSSI, полученные узлами-сенсорами NIDS друг от друга для различных градаций уровня принимаемого сигнала и градаций уровня мощности передатчиков, с последующим преобразованием уровней сигналов в расстояние, для электромагнитного профиля топологии контролируемого помещения на частоте работы мобильной сети WI-FI, при этом на узел-координатор приходит информация об уровнях принимаемых сигналов от всех узлов-сенсоров с точностью, одинаковой для всех узлов NIDS, и эти данные определяют матрицу значений Ai;j, где индекс i соответствует передающему узлу, а индекс j соответствует принимающему узлу, значения элементов данной матрицы соответствуют уровню принимаемых сигналов узлами ai;1=1…Р, при этом все элементы ai;1=0, если i=j или между данными узлами нет связи, кроме того, при информационном обмене на узле-координаторе вместе с информацией об уровнях передаваемых и принимаемых сигналов каждого из узлов-сенсоров собирается информация и о местоположении узлов-сенсоров в системе координат XOY контролируемой территории, матрице соответствует матрица Di;j, где di;j - измеренная дальность между i и j узлами, и каждой градации измерений уровня принимаемого сигнала соответствует дальность ai;j|p=1…Р ≡ di;j|p=i…P или Ai;j ≡ Di;j, далее для формирования базы данных калибровочных измерений проводится более ста измерений каждой градации уровня сигналов, и находятся средние значения из N значений измерений дальности  , а также создается оценочная таблица соответствия уровней сигналов на входе узла расстояниям до источника сигнала
, а также создается оценочная таблица соответствия уровней сигналов на входе узла расстояниям до источника сигнала 

 далее создаются оценочные таблицы соответствия расстояний для всех градаций уровней принимаемых сигналов приемниками узлов от 1 до Р и градаций уровней мощности излучения передатчика от k=1…K, формируются матрицы Аi;j|k=1...K и
далее создаются оценочные таблицы соответствия расстояний для всех градаций уровней принимаемых сигналов приемниками узлов от 1 до Р и градаций уровней мощности излучения передатчика от k=1…K, формируются матрицы Аi;j|k=1...K и  где
где  - усредненная по большому количеству измерений оценка расстояния между приемником и передатчиком при р-ой градации уровня принимаемого сигнала на приемнике и k-ой градации мощности излучения передатчика, далее при статистической обработке результатов измерений для исключения из результатов измерений промахов используется критерий В.И. Романовского и проверяется выполнение условия
- усредненная по большому количеству измерений оценка расстояния между приемником и передатчиком при р-ой градации уровня принимаемого сигнала на приемнике и k-ой градации мощности излучения передатчика, далее при статистической обработке результатов измерений для исключения из результатов измерений промахов используется критерий В.И. Романовского и проверяется выполнение условия  где
где
 а значение коэффициента tβ является табулированным, далее промахи удаляются из результатов измерений, и средние значения
а значение коэффициента tβ является табулированным, далее промахи удаляются из результатов измерений, и средние значения  находятся уже за исключением промахов, далее задается доверительная вероятность, величина измерений за вычетом промахов, табличный коэффициент Стьюдента tp;N; tp;∞, а затем вычисляется абсолютная погрешность результатов измерения:
находятся уже за исключением промахов, далее задается доверительная вероятность, величина измерений за вычетом промахов, табличный коэффициент Стьюдента tp;N; tp;∞, а затем вычисляется абсолютная погрешность результатов измерения: , где δНС - погрешность измерения координат узлов-сенсоров, после чего окончательно составляются базы данных калибровочных измерений и их погрешностей, далее при нахождении местоположения нарушителя производится разбиение контролируемого пространства в системе координат XOY с шагом hx=hy, который выбирается от 0,5 до 5 метров в соответствии с размерами территории, защищаемой NIDS, а шаг разбиения делается кратным
, где δНС - погрешность измерения координат узлов-сенсоров, после чего окончательно составляются базы данных калибровочных измерений и их погрешностей, далее при нахождении местоположения нарушителя производится разбиение контролируемого пространства в системе координат XOY с шагом hx=hy, который выбирается от 0,5 до 5 метров в соответствии с размерами территории, защищаемой NIDS, а шаг разбиения делается кратным  далее для I узлов с координатами (хi;уi), которые находятся в зоне радиовидимости нарушителя, пространство разбиения имеет границы
далее для I узлов с координатами (хi;уi), которые находятся в зоне радиовидимости нарушителя, пространство разбиения имеет границы 

 где
где  а предполагаемый нарушитель с координатами (хн;ун) находится в области пространства, определяемой неравенством
а предполагаемый нарушитель с координатами (хн;ун) находится в области пространства, определяемой неравенством  далее по результатам проверки каждой точки пространства возможного местоположения нарушителя с шагом разбиения h на выполнение данного неравенства составляется матрица Вi, где
далее по результатам проверки каждой точки пространства возможного местоположения нарушителя с шагом разбиения h на выполнение данного неравенства составляется матрица Вi, где  и каждый элемент данной матрицы bll имеет значение 0, когда нахождение нарушителя в данной точке не возможно, или 1, когда возможно, кроме того, матрице Bi ставится в соответствие дискретизированная область пространства возможного местоположения нарушителя Λi для i-го узла, таким образом, находятся Bi и все области пространства Λi для всех I узлов, которые находятся в зоне радиовидимости нарушителя, далее, предполагая изменение мощности передатчика нарушителя, находятся все матрицы Bik, которые определяют наборы областей пространств Λik для всех градаций k, а далее для определения местоположения нарушителя находятся наборы вариантов пересечений областей Λik для всех I узлов, которые находятся в зоне радиовидимости нарушителя
и каждый элемент данной матрицы bll имеет значение 0, когда нахождение нарушителя в данной точке не возможно, или 1, когда возможно, кроме того, матрице Bi ставится в соответствие дискретизированная область пространства возможного местоположения нарушителя Λi для i-го узла, таким образом, находятся Bi и все области пространства Λi для всех I узлов, которые находятся в зоне радиовидимости нарушителя, далее, предполагая изменение мощности передатчика нарушителя, находятся все матрицы Bik, которые определяют наборы областей пространств Λik для всех градаций k, а далее для определения местоположения нарушителя находятся наборы вариантов пересечений областей Λik для всех I узлов, которые находятся в зоне радиовидимости нарушителя  где
где  - набор возможных пространств пересечения геометрического места точек возможного положения нарушителя, a f - индекс от 1 до F количества наборов возможных пространств пересечения геометрического места точек, при которых пересечение всех узлов возможно, и
- набор возможных пространств пересечения геометрического места точек возможного положения нарушителя, a f - индекс от 1 до F количества наборов возможных пространств пересечения геометрического места точек, при которых пересечение всех узлов возможно, и  далее находится оптимальный набор, для которого выполняется условие
далее находится оптимальный набор, для которого выполняется условие  который имеет максимальное количество точек возможного местоположения нарушителя, далее находится геометрический центр данной области
который имеет максимальное количество точек возможного местоположения нарушителя, далее находится геометрический центр данной области  как координаты нарушителя
как координаты нарушителя  а в случае, если не существует таких наборов возможных пространств пересечения геометрического места точек возможного местоположения нарушителя, при которых
а в случае, если не существует таких наборов возможных пространств пересечения геометрического места точек возможного местоположения нарушителя, при которых  необходимо уменьшать шаг разбиения пространства h или проводить заново все процедуры калибровочных измерений для получения базы данных измерений
необходимо уменьшать шаг разбиения пространства h или проводить заново все процедуры калибровочных измерений для получения базы данных измерений  таким образом, представлен порядок выполнения действий во времени по определению местоположения мобильного узла-нарушителя в системах обнаружения вторжений (NIDS) для обеспечения информационной безопасности мобильных систем передачи данных.
таким образом, представлен порядок выполнения действий во времени по определению местоположения мобильного узла-нарушителя в системах обнаружения вторжений (NIDS) для обеспечения информационной безопасности мобильных систем передачи данных.
| US 2018102032 A1, 12.04.2018 | |||
| CN 0108881277 A, 23.11.2018 | |||
| СПОСОБ И УЗЕЛ ДЛЯ ЛОКАЛИЗАЦИИ УЗЛА В БЕСПРОВОДНОЙ СЕТИ | 2011 |
|
RU2573592C2 |
| СПОСОБ ЛОКАЦИИ РАДИОУЗЛА, СИСТЕМА ЛОКАЦИИ РАДИОУЗЛА И УЗЕЛ ОБРАБОТКИ ДАННЫХ | 2010 |
|
RU2432581C1 |
| Chatfield, Brycent, "Intrusion Detection for Smart Grid Communication Systems", 2017 | |||
| Electronic Theses and Dissertations | |||
| Ручной механизм для движения лодки | 1925 |
|
SU1600A1 |

