ОБЛАСТЬ ТЕХНИКИ
Настоящее раскрытие в целом относится к нефтепромысловому оборудованию и, в частности, к скважинным инструментам, буровым системам и способам бурения для бурения скважин в земле. В частности, настоящее изобретение относится к снижению трения бурильной колонны при бурении с применением забойного двигателя.
УРОВЕНЬ ТЕХНИКИ
В системах направленного бурения обычно применяют бурильную колонну с бурильной трубой, узлом нижней части бурильной колонны и буровым долотом. Узел нижней части бурильной колонны содержит забойный гидротурбинный двигатель, движимый буровым раствором, для поворачивания бурового долота и механизм искривления ствола скважины на определенный угол относительно осевой линии бурового долота. Узел нижней части бурильной колонны удерживает бурильная колонна, которая проходит к земной поверхности и через которую буровой раствор подают к узлу нижней части бурильной колонны.
Для бурения прямых участков ствола скважины, как правило, применяют обычные способы роторного бурения. Бурильную колонну поворачивает буровая установка, расположенная на поверхности, а узел нижней части бурильной колонны с забойным гидротурбинным двигателем и отклоняющим переводником поворачивают вместе с бурильной колонной. Однако для бурения криволинейного участка ствола скважины с помощью забойного гидротурбинного двигателя поворачивают долото, а механизм бокового искривления ствола скважины направляет долото в сторону от оси ствола скважины для формирования слегка изогнутого участка ствола скважины с требуемыми параметрами отклонения или угла набора кривизны. При бурении криволинейных участков бурильную колонну не поворачивают, а она просто скользит по стволу скважины.
Направление бурения или изменение траектории ствола скважины определяется углом торца бурового долота. Угол торца долота определяется направлением, в котором ориентирован механизм искривления ствола скважины. Торец долота может быть установлен относительно земной поверхности поворотом бурильной колонны. Оператор стремится поддерживать правильный угол торца долота, корректируя крутящий момент или угол бурильной колонны с помощью роторного стола или верхнего привода на буровой установке.
Для направленного бурения характерным является то, что значительная часть бурильной колонны может находиться в непосредственном контакте со стенкой ствола скважины и опираться об нее, из-за чего создается значительная задержка движения. Трение усиливается, когда бурильная колонна не поворачивается, а функционирует в режиме безроторного бурения. Такое трение бурильной колонны усложняет поддержание требуемой нагрузки на долоте для достижения оптимальной скорости проходки скважины и обуславливает скачкообразное движение. Кроме того, трение бурильной колонны может вызывать возникновение осевого усилия, зависящего от скольжения бурильной колонны, которое может быть настолько большим, что в момент высвобождения бурильной колонны забойный гидротурбинный двигатель может стопориться. Кроме того, при корректировании угла бурильной колонны, осуществляемом с поверхности, когда стремятся скорректировать угол торца долота, значительная часть изменения угла может быть нейтрализована из-за трения без изменения угла торца долота, а скачкообразное движение может привести к завышению оператором корректируемого целевого угла торца долота.
В некоторых случаях трение бурильной колонны может быть снижено путем поворотного раскачивания бурильной колонны назад и вперед между первым углом и вторым углом или между противоположными значениями крутящего момента. Однако раскачивание не может в достаточной степени снизить трение. Кроме того, вследствие раскачивания может быть непреднамеренно изменен угол торца долота, что приведет к существенному отклонению ствола скважины назад и вперед, увеличению извилистости ствола скважины и повышению риска прихвата колонны труб.
В иных случаях вместо забойного гидротурбинного двигателя и механизма искривления ствола скважины могут применять роторно-управляемое устройство. Роторно-управляемое устройство прикладывает модулированное боковое усилие смещения к долоту в требуемом направлении для придания направления наклонно-направленной скважине с одновременным поворачиванием всей бурильной колонны. Таким образом, требуемый угол торца долота и угол отклонения могут поддерживать с одновременной минимизацией трения бурильной колонны. Если придание направления не требуется, роторно-управляемое устройство устанавливают таким образом, чтобы не допустить боковое смещение. Поскольку в случае применения роторно-управляемого устройства бурильная колонна не совершает скользящее движение, объем традиционных проблем, связанных со скольжением, например, скачкообразное движение и задержка движения, значительно снижается. Однако роторно-управляемые устройства могут быть сложными и дорогостоящими.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Далее варианты осуществления описаны более подробно со ссылкой на прилагаемые фигуры, на которых:
На фиг. 1 представлена схема, иллюстрирующая приведенную в качестве примера буровую систему, соответствующую аспектам настоящего изобретения;
На фиг. 2 представлена схема, иллюстрирующая узел нижней части бурильной колонны по фиг. 1, соответствующий аспектам настоящего изобретения;
На фиг. 3 представлена схема, иллюстрирующая другой пример буровой системы, соответствующей аспектам настоящего изобретения;
На фиг. 4 представлена схема, иллюстрирующая приведенный в качестве примера электродвигатель системы управления, соответствующий аспектам настоящего изобретения;
На фиг. 5 представлена схема, иллюстрирующая приведенное в качестве примера устройство отклонения потока, соответствующее аспектам настоящего изобретения;
На фиг. 6 представлена другая схема, иллюстрирующая приведенное в качестве примера устройство отклонения потока, соответствующее аспектам настоящего изобретения;
На фиг. 7 представлена схема, иллюстрирующая элементы приведенного в качестве примера электродвигателя системы управления, соответствующие аспектам настоящего изобретения;
На фиг. 8 представлена другая схема, иллюстрирующая увеличенный вид в поперечном разрезе по линии 8-8 на фиг. 7, изображающий приведенное в качестве примера расположение статора и ротора электродвигателя системы управления;
На фиг. 9 представлена блок-схема контроллера двигателя для управления электродвигателем системы управления, соответствующего аспектам настоящего изобретения;
На фиг. 10 представлена схема электрических соединений, изображающая приведенную в качестве примера инвертирующую схему контроллера двигателя; и
На фиг. 11 представлена блок-схема, которая иллюстрирует приведенный в качестве примера способ бурения ствола скважины с управлением торцом долота при непрерывном поворачивании бурильной трубы в соответствии с одним из вариантов осуществления.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
В данном описании номера позиций и/или буквенные обозначения могут повторяться в различных примерах. Такое повторение применено с целью упрощения и большей ясности и само по себе не определяет отношение между различными рассматриваемыми вариантами осуществления и/или конфигурациями. Применяемые здесь глаголы «связывать» и «соединять» и родственные им по значению могут предполагать как прямое, так и непрямое соединение.
Термины пространственного отношения, например, «под», «ниже», «нижний», «над», «выше», «вверх по стволу скважины», «вниз по стволу скважины», «выше по течению», «ниже по течению» и т. п., могут быть применены в данном документе для удобства описания положения одного элемента или связи признака с другим элементом или признаком (другими элементами или признаками), как показано на фигурах. Термины пространственного отношения включают различные ориентации устройства во его время применения или функционирования в дополнение к ориентации, изображенной на фигурах. Например, если устройство изображено на фигурах в перевернутом положении, элементы, описанные как находящиеся «под» другими элементами или признаками, или «ниже» них, в таком случае будут находиться «выше» других элементов или признаков. Таким образом, приведенный в качестве примера термин «ниже» может охватывать обе ориентации: выше и ниже. Устройство может быть ориентировано иначе (повернуто на 90 градусов или установлено в другие положения), а применяемые в данном документе характеристики пространственного расположения также могут быть интерпретированы соответствующим образом.
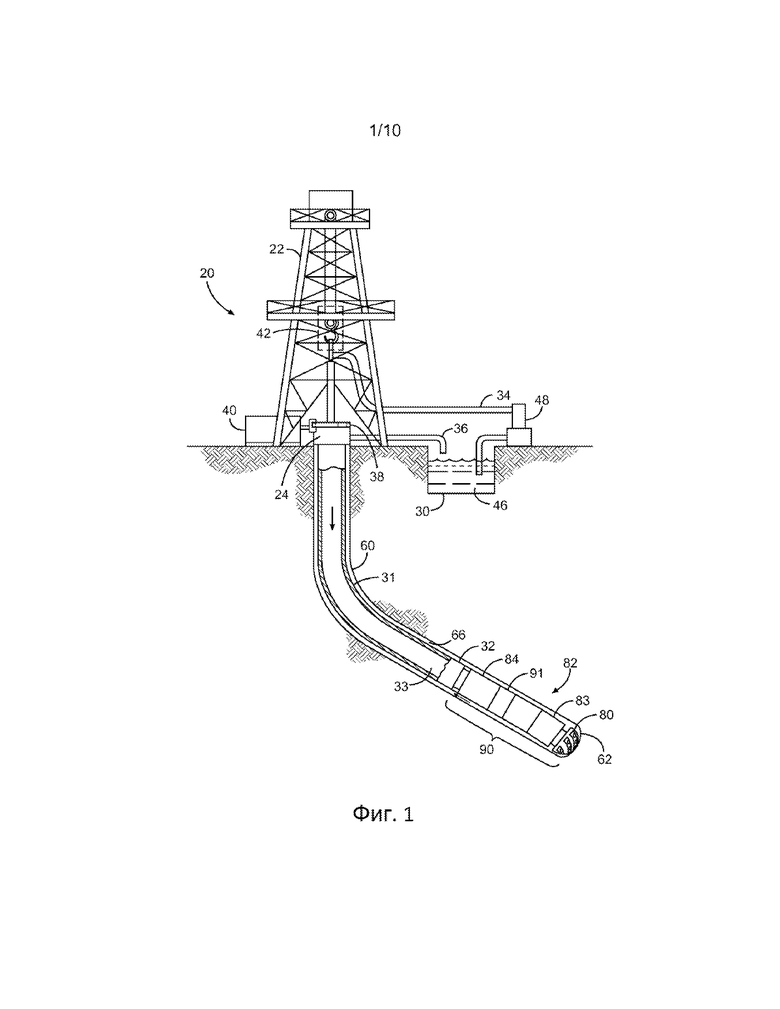
На фиг. 1 представлен вертикальный вид парциального сечения буровой системы 20, содержащей узел 90 нижней части бурильной колонны согласно одному из вариантов осуществления. Буровая система 20 может содержать наземную буровую установку 22. Однако идеи настоящего изобретения могут быть применены на морских платформах, полупогружных буровых платформах, буровых судах и в любой другой буровой системе, позволяющей формировать ствол скважины, проходящий через одну или большее количество подземных формаций.
Буровая установка 22 может быть расположена вблизи устья 24 скважины. Буровая установка 22 может содержать роторный стол 38, приводной двигатель 40 ротора и другое оборудование, связанное с поворачиванием бурильной колонны 32 в стволе 60 скважины. Между наружной стороной бурильной колонны 32 и внутренним диаметром ствола 60 скважины образован кольцевой зазор 66. В некоторых случаях буровая установка 22 также может содержать верхний привод 42. Кроме того, в устье 24 скважины могут быть установлены противовыбросовые устройства (явно не показаны) и другое оборудование, связанное с бурением ствола скважины.
Нижний конец бурильной колонны 32 содержит узел 90 нижней части бурильной колонны, к дальнему концу которого прикреплено долото 80 для роторного бурения. Буровой раствор 46 могут закачивать из резервуара 30 с помощью одного или большего количества насосов 48 по трубопроводу 34 в верхний конец бурильной колонны 32, проходящей от устья 24 скважины. Затем буровой раствор 46 протекает через продольную внутреннюю часть 33 бурильной колонны 32, через узел 90 нижней части бурильной колонны и выходит из насадок, сформированных на долоте 80 для роторного бурения. На нижнем конце 62 ствола 60 скважины буровой раствор 46 может смешиваться с выбуренной породой, а также с другими скважинными флюидами и обломками. Затем смесь бурового раствора поступает вверх через кольцевой зазор 66 для переноса выбуренной породы и обломков породы из скважины на поверхность. По трубопроводу 36 флюид могут возвращать в резервуар 30, но для удаления выбуренной породы и обломков породы перед возвращением бурового раствора в резервуар 30 могут быть предусмотрены сетчатые фильтры, фильтры и/или центрифуги различных типов (явно не показаны). В качестве трубопроводов 34 и 36 могут применять различные типы труб, трубок и/или шлангов.
Согласно одному из вариантов осуществления узел 90 нижней части бурильной колонны содержит забойный гидротурбинный двигатель 82, который содержит механизм 83 искривления ствола скважины. Забойный гидротурбинный двигатель 82 соединен с двигателем 84 системы управления и приводится ним в движение. В одном из вариантов осуществления двигатель 84 системы управления является электродвигателем. Узел 90 нижней части бурильной колонны также может содержать различные другие инструменты 91, например, инструменты, которые предоставляют каротажные данные или данные измерений и другую информацию из нижней части ствола 60 скважины. Данные измерений и другую информацию могут передавать с конца 62 ствола 60 скважины с применением способов выполнения измерений во время бурения и преобразовывать в электрические сигналы на поверхности скважины для, помимо прочего, контроля функционирования бурильной колонны 32, узла 90 нижней части бурильной колонны и связанного с ним долота 80 для роторного бурения.
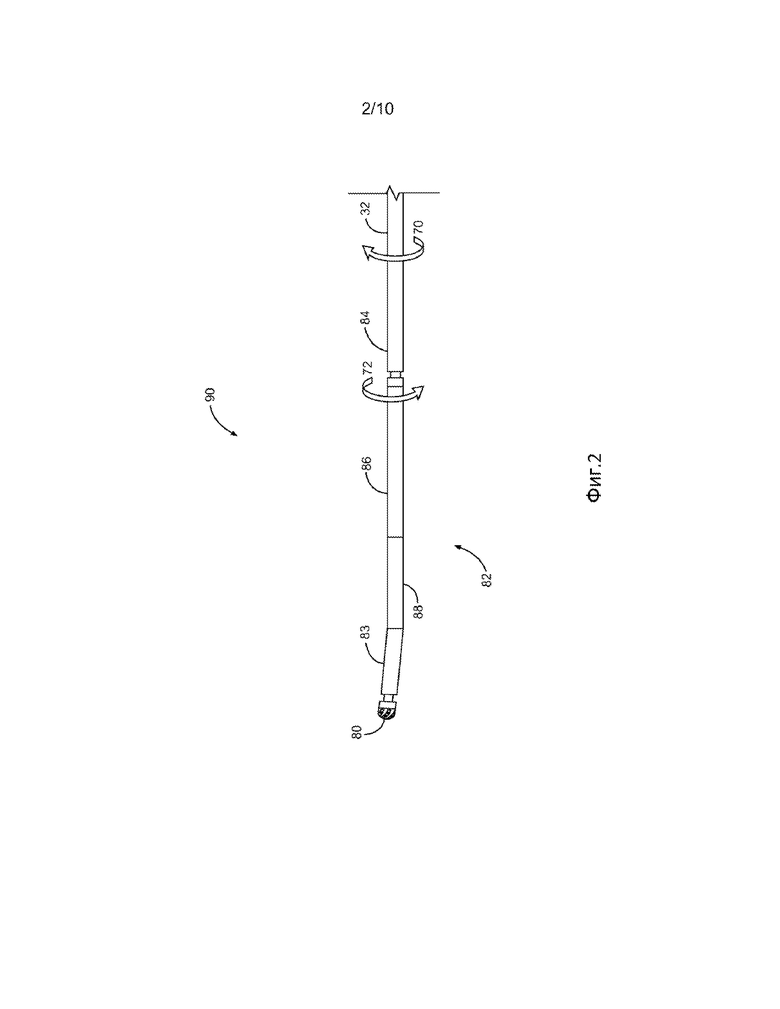
На фиг. 2 представлен вертикальный вид узла 90 нижней части бурильной колонны, который содержит забойный гидротурбинный двигатель 82, который в свою очередь может содержать верхнюю силовую секцию 86 и нижнюю подшипниковую секцию 88. Силовая секция 86 может представлять собой объемный двигатель типа Муано, содержащий лопастный спиральный ротор, который поворачивается вокруг и внутри эластомерного статора, имеющего одну лопасть, которая больше, чем ротор. Ротор приводят в движение, создавая перепад давления флюида в силовой секции. Такие гидравлические забойные двигатели способны создавать высокий крутящий момент и поворачиваться с низкой частотой оборотов, которая обычно требуется для возможности осуществления управления. Альтернативно, силовая секция 86 может содержать крыльчатую турбину, приводимую в движение буровым раствором, также называемую турбобуром, которая работает на высоких частотах оборотов и с низким крутящим моментом. Нижняя подшипниковая секция 88 содержит упорные и радиальные подшипники (не показаны). Нижняя подшипниковая секция 88 может содержать ротор (не показан) с верхним и нижним шарнирами равных угловых скоростей, которые соединяют ротор силовой секции 86 с буровым долотом 80 для его поворачивания. Валы постоянной скорости позволяют осуществлять боковой изгиб корпуса гидравлического забойного двигателя 82, а также отклонение ротора типа Муано.
Узел 90 нижней части бурильной колонны содержит двигатель 84 системы управления. Двигатель 84 системы управления может представлять собой двигатель с гидроприводом, например, объемный двигатель типа Муано или забойный гидротурбинный двигатель, описанный выше, или электродвигатель. Двигатель 84 системы управления соединен с забойным гидротурбинным двигателем 82 и приводит его в движение. Двигатель 84 системы управления в свою очередь соединен с бурильной трубой 31 бурильной колонны 32 и приводится нею в движение. В одном варианте осуществления статор двигателя 84 системы управления соединен с бурильной трубой 31, а ротор двигателя 84 системы управления соединен с забойным гидротурбинным двигателем 82. В другом варианте осуществления ротор двигателя 84 системы управления соединен с бурильной трубой 31, а статор двигателя 84 системы управления соединен с забойным гидротурбинным двигателем 82.
Хотя варианты осуществления, представленные в данном документе, описаны с точки зрения применения бурильной трубы, для специалиста в данной области будет очевидно, что она может быть заменена на другие средства для транспортировки, например, на колонну гибких труб, которая может быть встречаться в настоящем документе под термином «бурильная труба».
В ходе эксплуатации бурильную трубу 31 поворачивают в первом направлении, указанном стрелкой 70, а она в свою очередь поворачивает статор или двигатель 84 системы управления в первом направлении. При бурении прямых участков ствола скважины двигатель 84 системы управления не приводят в движение, а его ротор не поворачивается относительно его статора. Аналогично отключают забойный гидротурбинный двигатель 82. Соответственно, когда бурильную колонну 32 поворачивают в первом направлении 70, буровое долото 80 поворачивается в направлении 70 с применением обычного способа роторного бурения. Однако при бурении криволинейных участков ствола скважины, когда бурильную трубу 31 поворачивают в первом направлении 70, двигатель 84 системы управления поворачивают в направлении, противоположном первому направлению, показанному стрелкой 72, с частотой оборотов, равной частоте оборотов бурильной трубы 31. В результате этого забойный гидротурбинный двигатель 82 и торец бурового долота 80 остаются неподвижными относительно формации несмотря на то, что бурильная труба 31 поворачивается. Трение бурильной колонны значительно снижается из-за непрерывного поворачивания бурильной трубы. Кроме того, значительно улучшаются характеристики очистки ствола, поскольку непрерывное поворачивание бурильной трубы облегчает удаление выбуренной породы.
В одном варианте осуществления частоту оборотов двигателя 84 системы управления или частоту оборотов бурильной трубы 31 можно периодически регулировать, чтобы минимизировать несоответствие одной частоты оборотов, в большую или меньшую сторону, по отношению к другой частоте оборотов. Таким образом, при необходимости торец бурового долота 80 можно медленно поворачивать, ориентировать и переустанавливать. Когда угол торца долота скорректирован, частоты оборотов двигателя 84 системы управления и бурильной трубы 31 снова совпадают, а угол торца долота поддерживают постоянным.
Для регулирования частоты оборотов двигателя 84 системы управления могут применять различные датчики и системы управления двигателем, обсуждаемые более подробно ниже. Например, можно измерить и сбалансировать частоту оборотов и/или крутящий момент бурильной трубы 31. Традиционные измерительные системы для ориентирования, предназначенные для поддержания угла торца долота, могут быть легко приспособлены для управления двигателем 84 системы управления.
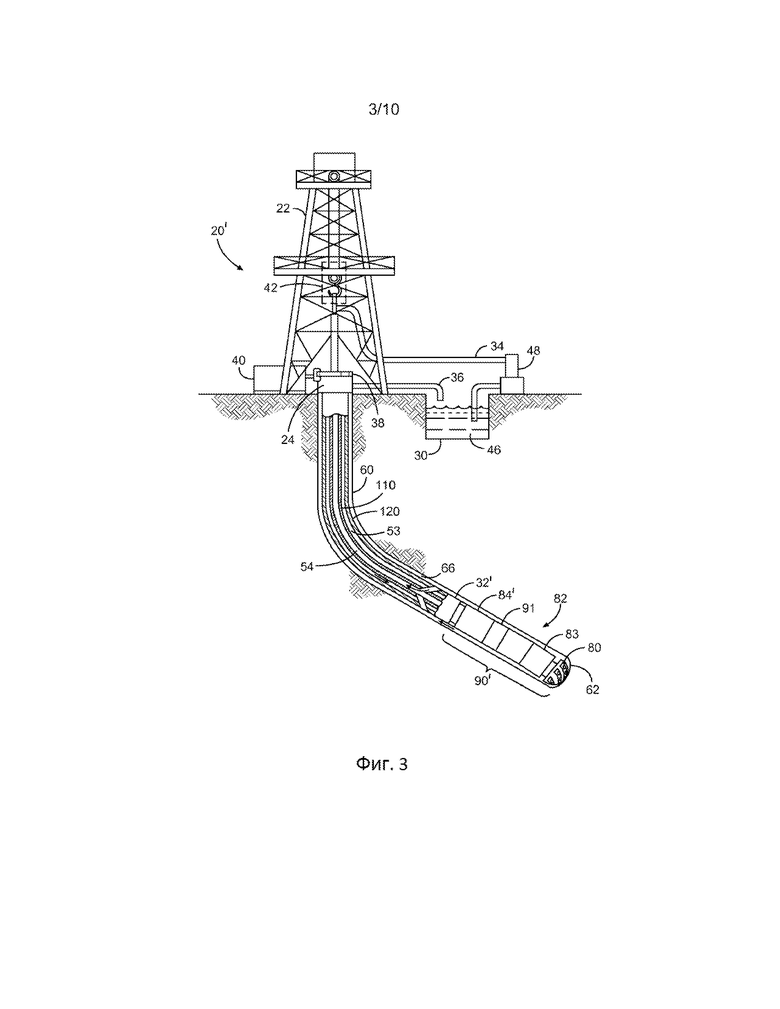
На фиг. 3 представлен вертикальный вид парциального сечения буровой системы 20', содержащей узел 90' нижней части бурильной колонны согласно одному из вариантов осуществления, в котором вместо обычной бурильной колонны 32 по фиг. 1 применена бурильная колонна 32' типа «труба в трубе» в соответствии со способом бурения, предложенным компанией Reelwell. Бурильная колонна 32' содержит внутреннюю трубу 110, установленную внутри наружной трубы 120 и соосно с ней. Внутренняя труба 110 и наружная труба 120 могут быть эксцентрическими или концентрическими. Канал 53 кольцевого течения образован между внутренней трубой 110 и наружной трубой 120, а канал 54 внутреннего течения образован во внутренней части внутренней трубы 110. Кроме того, кольцевой зазор 66 образован между наружной поверхностью бурильной колонны 32' и внутренней стенкой ствола 60 скважины. Устройство 210 отклонения потока, расположенное вблизи дальнего конца бурильной колонны 32', гидравлически соединяет кольцевой зазор 66 с каналом 54 внутреннего течения.
Как и в случае буровой системы 20 по фиг. 1, буровая система 20' по фиг. 3 может содержать наземную буровую установку 22, морскую платформу, полупогружную буровую платформу, буровое судно или т. п. Буровая установка 22 может быть расположена вблизи устья 24 скважины и может содержать роторный стол 38, приводной двигатель 40 ротора и другое оборудование, связанное с поворачиванием бурильной колонны 32' в стволе 60 скважины. В некоторых случаях буровая установка 22 может содержать верхний приводной двигатель или установку 42 верхнего привода. Кроме того, в устье 24 скважины могут быть установлены противовыбросовые устройства (явно не показаны) и другое оборудование, связанное с бурением ствола скважины.
Нижний конец бурильной колонны 32' содержит узел 90' нижней части бурильной колонны, к дальнему концу которого прикреплено долото 80 для роторного бурения. Буровой раствор 46 могут закачивать из резервуара 30 с помощью одного или большего количества насосов 48 по трубопроводу 34 в верхний конец бурильной колонны 32', проходящей от устья 24 скважины. Затем буровой раствор 46 протекает через канал 53 кольцевого течения между внутренней трубой 110 и наружной трубой 120, через узел 90' нижней части бурильной колонны и выходит из насадок, сформированных на долоте 80 для роторного бурения. На нижнем конце 62 ствола 60 скважины буровой раствор 46 может смешиваться с выбуренной породой, а также с другими скважинными флюидами и обломками. Затем смесь бурового раствора поступает вверх через кольцевой зазор 66, через устройство 210 отклонения потока и вверх по каналу 54 внутреннего течения во внутренней трубе 110 для переноса выбуренной породы и других обломков из скважины на поверхность. По трубопроводу 36 флюид могут возвращать в резервуар 30, но для удаления выбуренной породы и обломков породы перед возвращением бурового раствора в емкость 30 могут применять сетчатые фильтры, фильтры и/или центрифуги различных типов (явно не показаны). В качестве трубопроводов 34 и 36 могут применять различные типы труб, трубок и/или шлангов.
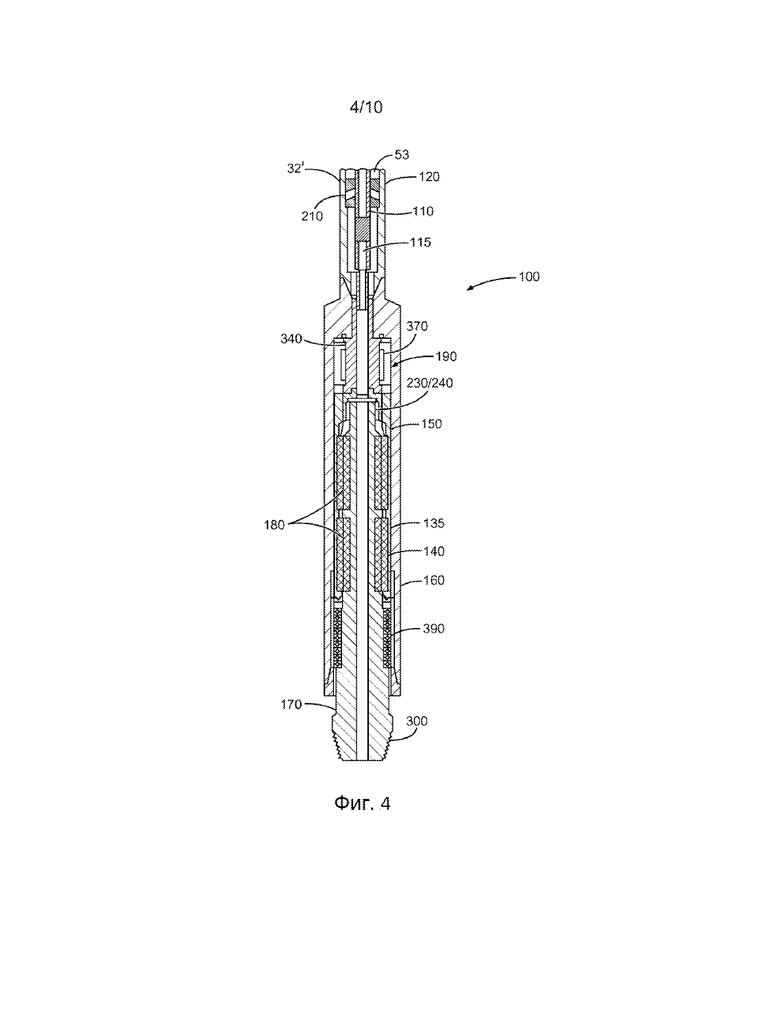
На фиг. 4 представлено аксиальное поперечное сечение электродвигателя 84' системы управления, соответствующего одному из вариантов осуществления. Электродвигатель 84' системы управления выполнен с возможностью регулирования частоты оборотов и крутящего момента. Кроме того, для облегчения достижения на выходе требуемой частоты оборотов и крутящего момента дополнительно может быть предусмотрена планетарная зубчатая передача (не показана).
Электродвигатель 84' системы управления может быть выполнен в виде части бурильной колонны 32' «труба в трубе», которая содержит внутреннюю трубу 110, наружную трубу 120 и устройство 210 отклонения потока. Электродвигатель 84' системы управления может содержать корпус 160 двигателя, узел 150 статора, содержащий обмотки 140 статора, ротор 170, содержащий магниты 180 ротора, секцию 340 электронного оборудования, которая содержит контроллер 370 двигателя, и ограничитель 230 расхода, которые описаны более подробно ниже.
В некоторых вариантах осуществления электропитание могут передавать в виде постоянного тока или однофазного переменного тока по внутренней трубе 110 и наружной трубе 120 с поверхности через всю бурильную колонну 32'. Внутренняя труба 110 представляет собой «фазовый» проводник питания, а наружная труба 120 заземлена, поскольку наружная труба 120, вероятно, будет находиться в проводящем контакте с заземленной буровой установкой. Наружная поверхность внутренней трубы 110 и/или внутренняя поверхность наружной трубы 120 может быть покрыта электроизоляционным материалом (явно не показан) для предотвращения короткого замыкания внутренней трубы 110 через буровой раствор или другие точки контакта на наружную трубу 120. Примеры диэлектрических изолирующих материалов включают полиимид, политетрафторэтилен или другие фторполимеры, нейлон и керамические покрытия. Оголенный метал внутренней трубы 110 подвержен воздействию только в областях, которые герметизируют и защищают от бурового раствора. Оголенный метал внутренней трубы 110 может быть оставлен незащищенным только для выполнения электрических соединений вдоль бурильной колонны 32' до следующего стыка внутренней трубы. Такие области могут быть заполнены воздухом или неэлектропроводящим флюидом, например, трансформаторным маслом, или проводящим флюидом, например, буровым раствором на водной основе, в случае отсутствия пути для прохождения электрического тока и возможности короткого замыкания внутренней трубы 110 на наружную трубу 120.
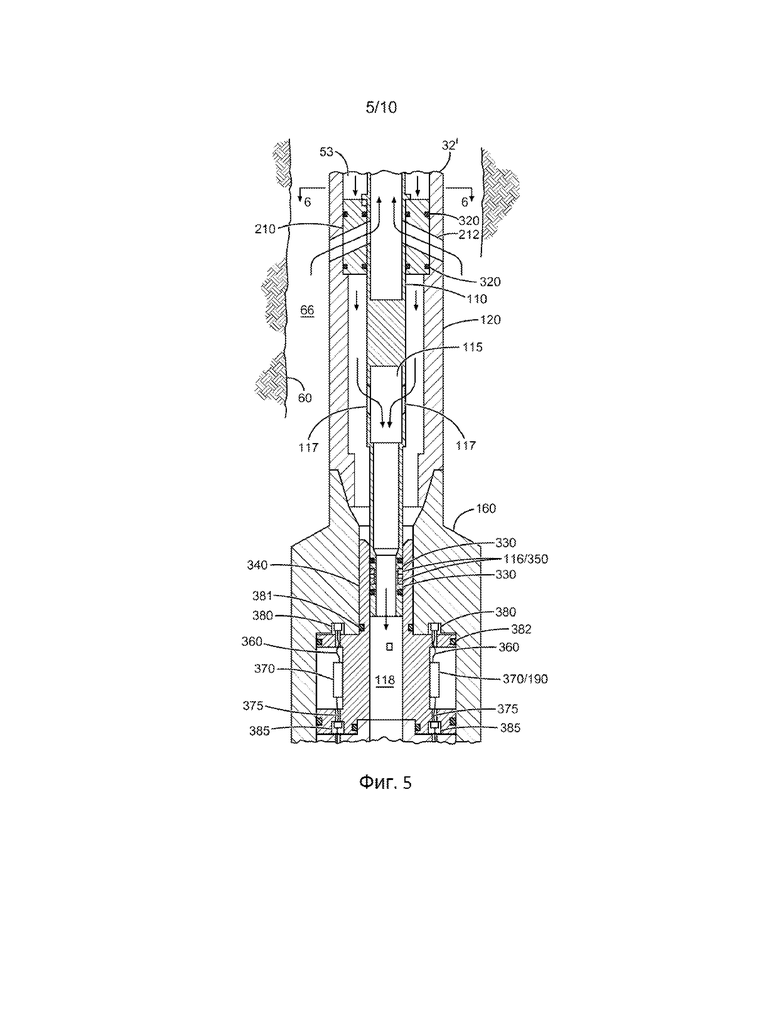
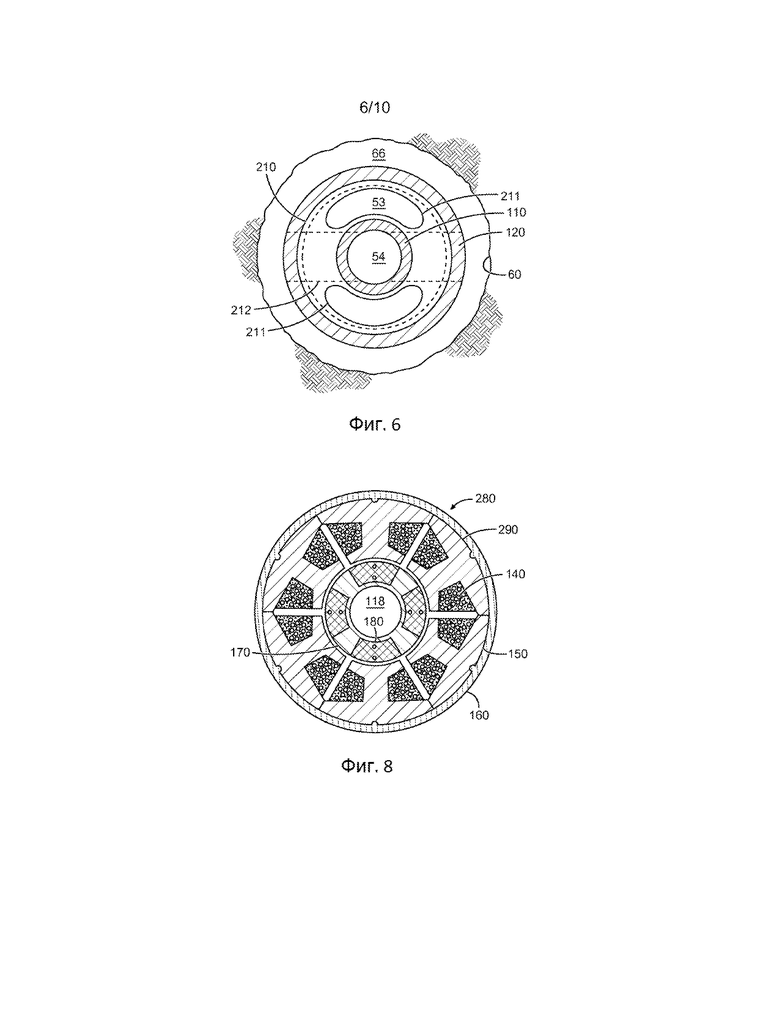
На фиг. 5 представлено детализированное аксиальное поперечное сечение нижней части бурильной колонны 32' и верхней части электродвигателя 84' системы управления, изображающее устройство 210 отклонения потока по фиг. 4. На фиг. 6 представлено поперечное сечение, взятое по линии 6-6 на фиг. 5, изображающее верхнюю часть устройства 210 отклонения потока. Согласно фиг. 4-6 устройство 210 отклонения потока расположено вблизи верхней части электродвигателя 84' системы управления. Устройство 210 отклонения потока электрически изолирует наружную трубу 120 от внутренней трубы 110. Устройство 210 отклонения потока может быть изготовлено из керамики или из металлического сплава с диэлектрическим изолирующим покрытием. Керамика обеспечивает высокую стойкость к эрозии, происходящей из-за воздействия песка, выбуренной породы, металлических обломков и других твердых частиц, движущихся из кольцевого пространства 66 в канал 54 внутреннего течения во внутренней трубе 110 по каналу возвратного течения на поверхность. При изготовлении керамики, например, компанией CARBO Ceramics®, применяют способы формования, которые могут подходить для формования устройства 210 отклонения потока.
Герметизирующие уплотнения 320 могут располагать в верхней и нижней части устройства 210 отклонения потока для предотвращения попадания кольцевого течения между внутренней трубой 110 и наружной трубой 120 в центральную часть внутренней трубы 110. Устройство 210 отклонения потока может быть прикреплено к внутренней трубе 110 и наружной трубе 120 таким образом, чтобы поддерживать правильную угловую ориентацию.
Во время эксплуатации буровой раствор 46 (фиг. 3) протекает через канал 53 кольцевого течения между внутренней трубой 110 и наружной трубой 120 и через овально-изогнутые каналы 211 внутри устройства 210 отклонения потока. При этом буровой раствор и выбуренная из земли порода из кольцевого зазора 66, образованного между стволом 60 скважины и наружной трубой 120, поступает во внутреннюю трубу 110 через перепускные отверстия 212. Внутренняя труба 110 перекрыта в устройстве 210 отклонения потока или непосредственно под ним таким образом, что флюид из кольцевого зазора 66 может проходить только вверх по внутренней трубе 110.
Буровой раствор, протекающий вниз ниже устройства 210 отклонения потока, может быть отведен в нижний центральный канал 115 внутренней трубы 110 через отверстия 117. В этом месте протекающий вниз буровой раствор 46 проходит из внутренней трубы 110 в продольный центральный трубопровод 118, образованный в двигателе 84' системы управления.
В одном из вариантов осуществления вдоль наружной части внутренней трубы 110 имеется электроизолирующее покрытие, кроме места контакта 116, расположенного во влагозащищенной области 330 соединения. Контакт 116 представляет собой небольшой участок неизолированной внутренней трубы 110, который сопрягается с секцией 340 электронного оборудования, для передачи электрического тока на двигатель 84' системы управления через контроллер двигателя 370. Кроме того, секция 340 электронного оборудования может быть электрически изолирована с помощью покрытия, за исключением области, которая сопрягается с контактом 116. Для создания электрического соединения между внутренней трубой 110 и секцией 340 электронного оборудования может быть применена пружина 350 из электропроводящей проволоки. Хотя это явно и не показано, секция 340 электронного оборудования может содержать установочные фиксаторы, стопоры или т. п. для поддержания правильной угловой ориентации.
Контроллер 370 двигателя, который находится в секции 340 электронного оборудования, может быть расположен выше обмоток 140 статора для управления частотой оборотов, крутящим моментом и различными другими аспектами функционирования электродвигателя 84' системы управления. Узел 370 электронного оборудования может быть способен осуществлять двустороннюю связь с поверхностью с помощью сигналов, совмещенных с электропитанием, которое подают по двухпроводному каналу, образованному внутренней трубой 110 и наружной трубой 120. Кроме того, узел 370 электронного оборудования может передавать данные между поверхностью и модулями, расположенными ниже двигателя для обеспечения функционирования системы каротажа во время бурения и/или системы измерений во время бурения, системы управления и подобных систем. Соединительные проводники 375 могут поддерживать такую передачу данных.
Для защиты электронного оборудования контроллер 370 двигателя может быть размещен внутри полости с регулируемым давлением. Контроллер 370 двигателя может иметь керамическое покрытие, позволяющее заполнять полость маслом и выравнивать давление с окружающей средой, благодаря чему может быть применена более тонкая стенка корпуса, позволяющая оставлять больше места для электронного оборудования и лучше охлаждать его.
Проводники 375, которые вставляют сквозь уплотнитель на поверхностях 385 герметичных перегородок, ведут к обмоткам 140 статора и расположенным ниже дополнительным датчикам. Секция 340 электронного оборудования может содержать одну или большее количество линий 360 заземления, которые вставляют сквозь уплотнитель на поверхностях 380 герметичных перегородок. Линии 360 заземления образуют обратный электрический путь к наружной трубе 120. Линии 360 заземления могут быть герметизированы от бурового раствора с помощью уплотнительных колец 381 и 382 или других средств, которые обеспечивают защиту от коррозии.
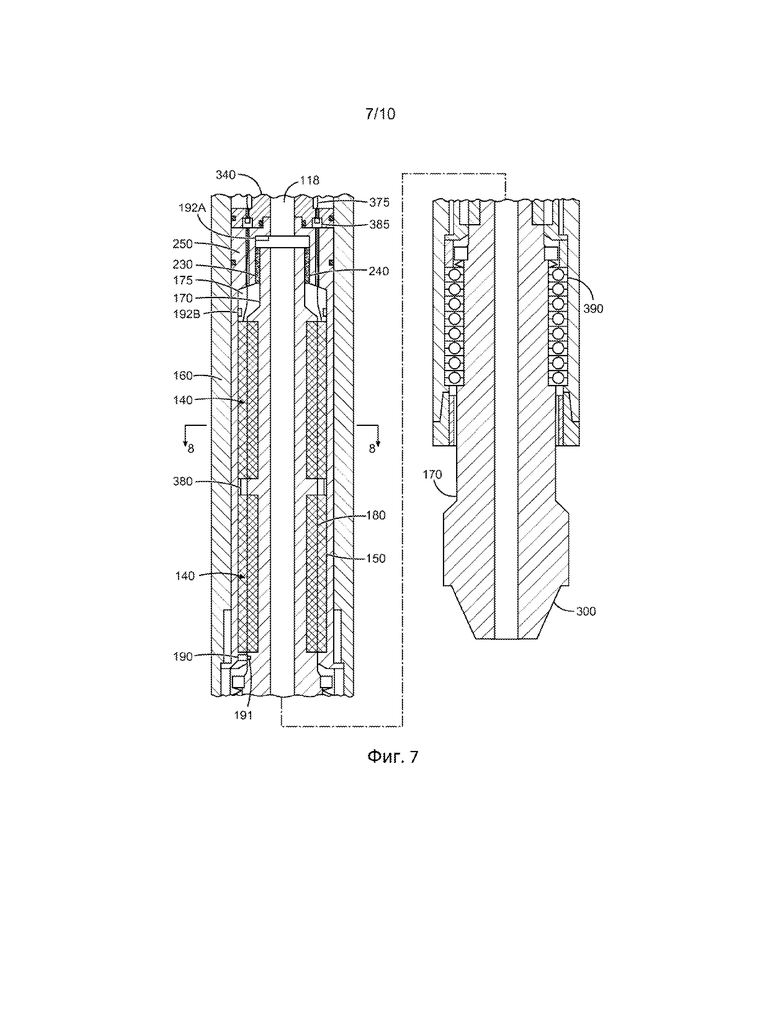
На фиг. 7 представлено аксиальное поперечное сечение средней и нижней частей электродвигателя 84' системы управления. Согласно фиг. 4 и 7 буровой раствор 46 (фиг. 3) стекает вниз по центральной части секции 340 электронного оборудования через центральный канал 118. В этом месте нисходящее течение бурового раствора разделяется на два пути течения. Первый путь течения продолжается до нижней части центрального канала 118 внутри ротора 170, и в конечном счете проходит вниз к забойному гидротурбинному двигателю 82 и буровому долоту 80 в нижней части бурильной колонны 32', где он выходит из бурового долота 80 и начинает свой путь обратно вверх по кольцевому пространству 66 ствола скважины (фиг. 3) к перепускным отверстиям 212 устройства отклонения потока. Второй путь течения проходит через ограничитель 230 расхода, расположенный в верхней части ротора 170 или вблизи нее, через зазор между наружной окружностью ротора 170 и внутренней окружностью узла 150 статора и через подшипниковый узел 390, в конечном итоге выходя из электродвигателя 84' системы управления в нижней части корпуса 160 двигателя.
Ограничитель 230 расхода предназначен для передачи небольшого количества бурового раствора для охлаждения обмоток 140 статора и смазывания узла 390 нижнего радиального и упорного подшипников электродвигателя 84' системы управления. Например, ограничитель 230 расхода может иметь небольшой зазор на пути течения, через который может поступать буровой раствор. Ограничитель 230 расхода может быть изготовлен из материала, стойкого к эрозии, например, карбида вольфрама, или сплава на основе кобальта, например, стеллита. В одном из вариантов осуществления ограничитель 230 расхода также одновременно может представлять собой верхний радиальный подшипник 240. В других вариантах осуществления могут применять отдельный верхний радиальный подшипник. Радиальный подшипник 240 может содержать корабельный каучук, поликристаллический алмазный композит, сплавленный карбид вольфрама или другие подходящие покрытия или подшипниковые материалы.
Хотя показано, что ограничитель 230 расхода расположен в верхней части ротора 170, он может быть расположен в любом месте вдоль любого пути течения, если только он способен должным образом дозировать буровой раствор между двумя путями течения, чтобы обеспечить достаточное охлаждение статора и смазывание подшипника с одновременным поддержанием достаточного течения бурового раствора через забойный гидротурбинный двигатель 82 и буровое долото 80 (фиг. 3).
Может быть применен дополнительный средний радиальный подшипник 380, который могут смазывать буровым раствором, как описано выше. В качестве среднего радиального подшипника 380 могут применять эластомерный корабельный подшипник, роликовый, шариковый, фрикционный подшипник или подшипник другого типа. Для радиальной и аксиальной опоры ротора 170 могут применять нижний подшипниковый узел 390.
Ротор 170 выходит за пределы нижней части корпуса 160 двигателя и заканчивается в соединителе 300 для приведения в движение забойного двигателя 82 (фиг. 3). Хотя соединитель 300 показан в виде штыревого соединителя, в соответствующих случаях могут применять муфту замка, шлицевое соединение или другое подходящее соединение.
На фиг. 8 представлено поперечное сечение, взятое по линии 8-8 на фиг. 7. Согласно фиг. 4, 7 и 8 обмотки 140 статора могут быть намотаны в виде клиновидных сегментов внутри узла 150 статора. Узел 150 статора может содержать головку 290 статора, механически изготовленную из цельной круглой трубной заготовки, но для простоты изготовления может быть предусмотрено некоторое количество отдельных клиновидных головок 290 статора, при этом обмотки 140 статора наматывают вокруг отдельных головок 290 статора. Затем соединенные друг с другом с помощью сварки отдельные головки 290 статора собирают внутри корпуса 160 двигателя. Узел 150 статора фиксируют в корпусе 160 двигателя для предотвращения относительного поворачивания. Например, головка (головки) 290 статора может иметь канавку по наружному диаметру и ее могут крепить к корпусу 160 двигателя для предотвращения поворачивания между ними.
Головку (головки) 290 статора изготавливают из мягкого железа с высокой магнитной проницаемостью. Обмотки 140 статора могут быть выполнены из магнитной проволоки, которая может быть изготовлена из серебра, меди, алюминия или любого проводящего элемента, покрытого лаком, полиэфирэфиркетоном (ПЭЭК) или другим диэлектрическим материалом. Обмотки 140 статора могут содержать множество витков провода, намотанного вокруг головок 290 статора. Дополнительно, герметизирующий материал, например, керамика, каучук или высокотемпературная эпоксидная смола, может находиться поверх верхней части обмоток 140 статора и/или могут быть заделаны вовнутрь их. Этот герметизирующий материал могут применять для защиты обмоток 140 статора от коррозии и эрозии из-за контакта с буровым раствором. Кроме того, такая герметизация поверх основного покрытия магнитной проволоки обеспечивает дополнительную защиту от короткого замыкания.
Двигатель 84' системы управления может содержать фиксированные постоянные магниты 180 ротора, установленные на роторе 170 таким образом, чтобы максимизировать реактивный момент. Преимущество постоянных магнитов 180 ротора заключается в создании ими высокого крутящего момента и в точном управлении частотой оборотов ротора без проскальзывания или без необходимости применения контактных колец или коммутаторов. Однако в соответствующих случаях вместо постоянных магнитов 180 в роторе 170 могут применять токопроводные обмотки. Например, могут применять короткозамкнутый индукционный ротор или обмотку ротора, на которую ток поступает через контактные кольца и коммутаторы.
Как показано на фигуре, электродвигатель 84' системы управления имеет шесть полюсов и четыре постоянных магнита 180 ротора, установленные на ротор 170. Однако в соответствующих случаях тип двигателя, количество полюсов, способы коммутации, средства управления и расположение обмотки и/или магнита могут варьировать. Например, количество обмоток и магнитов может быть масштабировано, например, могут применять двенадцать полюсов статора и восемь магнитов ротора или три полюса статора и два магнита ротора. Соответствующие комбинации зависят от нескольких факторов, которые включают требования в отношении надежности, однородности и пиковых значений крутящего момента.
Магниты 180 ротора характеризуются высокой напряженностью магнитного поля. Подходящие типы магнитов 180 ротора могут включать самариево-кобальтовые магниты. В некоторых вариантах осуществления магниты 180 ротора могут быть изготовлены в форме клина для соответствия полостям, сформированным внутри ротора 170, хотя в соответствующих случаях могут применять и другие формы. Магниты 180 ротора также могут изготавливать путем засыпки в пресс-форму рассыпного порошка из мелких магнитных частиц, которые затем прессуют и спекают в пресс-форме. Для выравнивания магнитных доменов из отдельных частиц с целью достижения их оптимальной ориентации во время осуществления этого способа производства могут прикладывать магнитное поле. Полярность магнитов 180 ротора могут чередовать (с поочередной установкой наружу северных и южных полюсов). После установки магнитов 180 ротора их могут прикреплять к ротору 170 или спекать в месте применения с помощью различных средств, например, фиксирующими лентами, хомутами, винтами, прорезями или другими крепежными элементами.
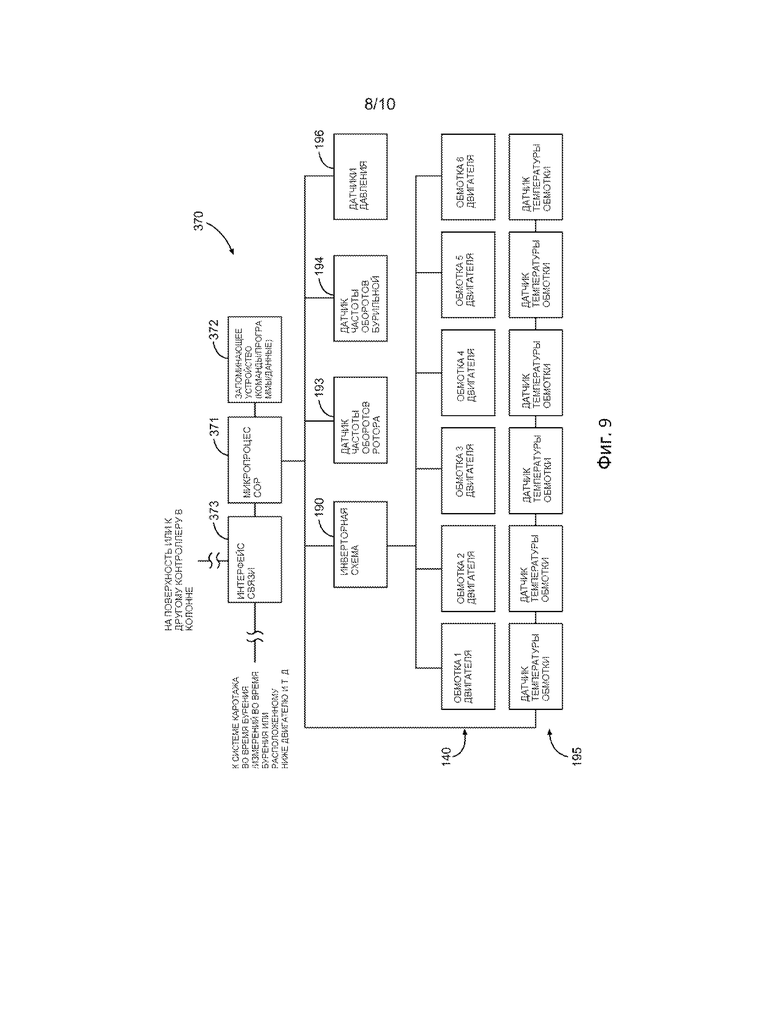
На фиг. 9 представлена блок-схема контроллера 370 двигателя, соответствующего одному из вариантов осуществления. Контроллер 370 двигателя предпочтительно содержит машину 371 для обработки данных с запоминающим устройством 372 для контроля электродвигателя 84' системы управления и управления ним. Машина 371 для обработки данных может управлять несколькими функциями и параметрами, которые включают, но не ограничиваются ими, запуск двигателя, частоту оборотов вала, выходной крутящий момент и температуру обмотки и/или контроль течения бурового раствора. Кроме того, машина 371 для обработки данных может управлять передачей данных двигателя и приемом данных о крутящем моменте и частоте оборотов бурильной трубы посредством интерфейса 373 связи. Интерфейс 373 связи может осуществлять связь по внутренней трубе 110 и наружной трубе 120 посредством контактных колец или индуктивной связи. Кроме того, интерфейс 373 связи может ретранслировать сигналы управления и данные измерений, например, между поверхностью и устройствами, расположенными ниже электродвигателя 84' системы управления внутри узла 90' нижней части бурильной колонны.
Машина 371 для обработки данных может выполнять команды, которые хранятся в запоминающем устройстве 372. Запоминающее устройство 372 может быть совмещено с машиной 371 для обработки данных в интегральном полупроводниковом приборе и/или его могут применять в виде одного или большего количества отдельных запоминающих устройств, которые включают запоминающее устройство с произвольным порядком выборки, электрически перепрограммируемое постоянное запоминающее устройство, магнитное или оптическое запоминающее устройство или другие формы. Кроме того, запоминающее устройство 372 могут применять для регистрации информации о рабочих характеристиках электродвигателя 84' системы управления, например, о температуре обмотки, температуре бурового раствора, частоте оборотов вала, выходной мощности, выходном крутящем моменте, напряжении, токе в обмотке и давлении по обе стороны ограничителя 230 расхода (фиг. 6).
В некоторых вариантах осуществления для контроля положения и частоты оборотов вала могут применять датчик 193 частоты оборотов ротора. Например, для контроля положения и частоты оборотов вала с помощью измерительных магнитов ротора 180 могут применять устройство, работающее на эффекте Холла. Выходной сигнал датчика 193 частоты оборотов ротора может быть передан на контроллер 370 двигателя, в котором машина 371 для обработки данных может автоматически оценивать и устанавливать частоту оборотов ротора. Кроме того, контроль положения ротора 170 во время его поворачивания позволяет оптимизировать передаваемый крутящий момент и обнаруживать проскальзывание полюса.
В одном из вариантов осуществления для определения частоты оборотов бурильной колонны 32' внутри электродвигателя 84' системы управления или в другом месте внутри узла 90' нижней части бурильной колонны могут применять датчик 194 частоты оборотов бурильной колонны, например, инерциальный датчик или подобный ему. Таким образом, с помощью контроллера 370 двигателя можно таким образом управлять частотой оборотов электродвигателя 84' системы управления, что частота оборотов ротора 170 будет равна по величине и противоположна по направлению по отношению к частоте оборотов бурильной колонны 32'. Частоту оборотов электродвигателя 84' системы управления могут таким образом контролировать, например, для поддержания постоянной ориентации торца долота. Альтернативно, датчик ориентации торца долота (не показан), который также может быть инерциальным датчиком, может непосредственно определять ориентацию торца долота и обеспечивать обратную связь с контроллером 370 двигателя для управления частотой оборотов ротора 170. В еще одном варианте осуществления частоту оборотов и/или крутящий момент бурильной колонны 32' определяют с помощью других средств и передают на контроллер 370 двигателя через интерфейс 373 связи, который, в свою очередь, управляет выходным крутящим моментом и/или частотой оборотов электродвигателя 84' системы управления.
В одном варианте осуществления частоту оборотов двигателя 84 системы управления или частоту оборотов бурильной колонны 32' можно периодически регулировать, чтобы минимизировать несоответствие одной частоты оборотов, в большую или меньшую сторону, по отношению к другой частоте оборотов. Таким образом, при необходимости торец бурового долота 80 можно медленно поворачивать, ориентировать и переустанавливать. Когда угол торца долота скорректирован, частоты оборотов двигателя 84 системы управления и бурильной колонны 32' снова совпадают, а угол торца долота поддерживается постоянным.
Кроме того, в некоторых вариантах осуществления датчики 195 температуры могут устанавливать рядом с обмотками 140 или встраивать в них. С целью контроля температуры двигателя для каждой обмотки 140 могут применять по меньшей мере один датчик 195 температуры. Кроме того, в некоторых вариантах осуществления для контроля расхода бурового раствора выше и ниже ограничителя 230 расхода (фиг. 7) могут применять датчики 196 давления.
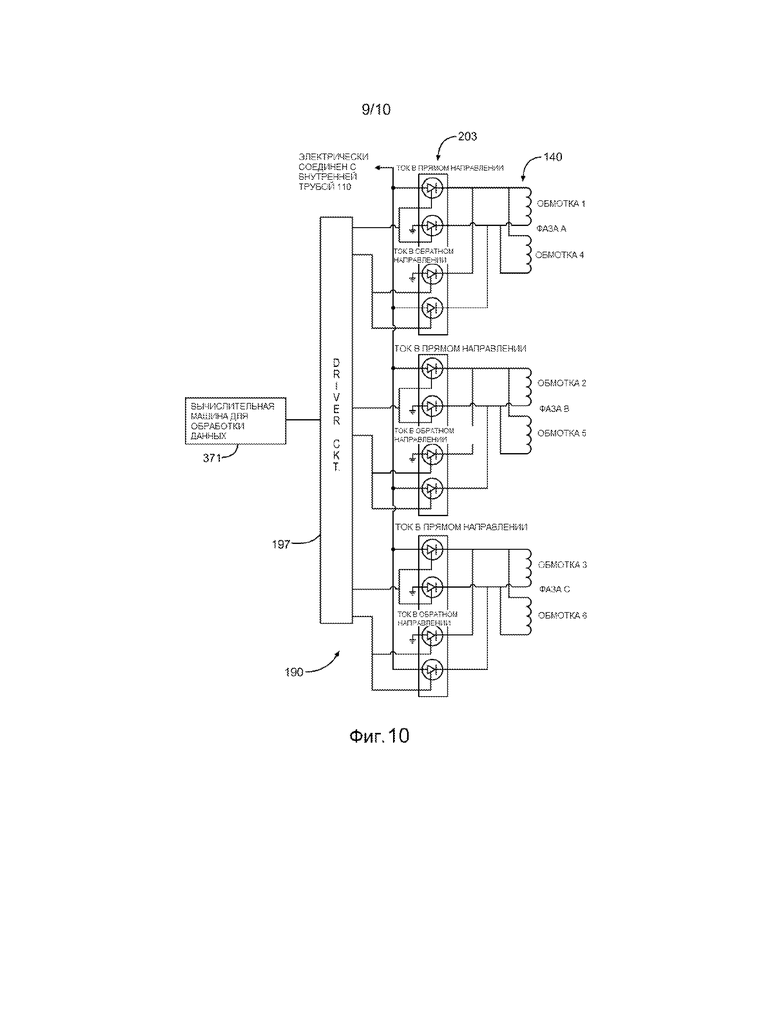
В соответствии с одним из вариантов осуществления машина 371 для обработки данных управляет электродвигателем 84' системы управления через инвертирующую схему 190. На фиг. 10 представлена схема электрических соединений верхнего уровня одного из возможных вариантов инвертирующей схемы 190. Согласно фиг. 9 и 10 инвертирующая схема 190 может преобразовывать мощность постоянного тока, подаваемую по внутренней трубе 110 и наружной трубе 120 (фиг. 3 и 4), в трехфазную мощность. Если по трубам 110, 120 подают однофазную мощность переменного тока, а не мощность постоянного тока, то инвертирующая схема 190 может быть по существу такой же, как показана на фиг. 10, за исключением того, она может включать выпрямитель для первого преобразования переменного тока в постоянный ток.
В инвертирующей схеме 190 применяют твердотельное электронное оборудование для переключения и изменения полярности тока в парах обмоток 140. Подходящее твердотельное электронное оборудование может включать переключатели 203 на основе полупроводниковых элементов, например, кремниевые управляемые тиристоры (SCR), биполярные транзисторы с изолированным затвором (IGBT), тиристоры и т. п. Пары обмоток могут физически находиться в двигателе напротив друг друга, как это показано на фиг. 8, причем разность фаз каждой пары составляет 120° относительно любой соседней пары обмоток. Каждая пара обмоток в соответствующих случаях может быть подключена параллельно или последовательно, а три фазы могут быть соединены в соответствии с конфигурацией типа «треугольник» или «звезда».
Для достижения максимальной мощности двигателя аппроксимированный синусоидальный сигнал мощности может быть сгенерирован машиной 371 для обработки данных и инверторной схемой 190. Однако в соответствующих случаях могут быть применены сигналы других форм, например, квадратной или пилообразной. Машина 371 для обработки данных и инверторная схема 190 взаимодействуют для получения требуемого направления поворачивания, поддержания разделения фаз каждой пары обмоток, установки частоты (включая линейное наращивание и снижение частоты с приемлемой скоростью при изменении частоты оборотов двигателя), а также управления уровнями мощности на обмотках для оптимизации передаваемого крутящего момента при заданных частотах оборотов. Каждая из этих функций может быть осуществлена путем изменения тока, напряжения или тока и напряжения, подаваемых на пары обмоток, и/или путем изменения рабочего цикла каждого периода волны.
Микропроцессор 371 может поддерживать ширину импульса и угол сдвига фаз для всех трех фаз мощности и отправлять сигналы синхронизации на инверторную схему 190 для генерирования сигналов мощности, подаваемых на обмотки 140. В одном из вариантов осуществления схему 197 запуска применяют как часть инверторной схемы 190 для сопряжения машины 371 для обработки данных с мощными коммутирующими устройствами 203. Схема 197 запуска может представлять собой небольшой переключатель усилителя мощности, применяемый для получения мощности достаточной величины для включения и выключения полупроводниковых переключателей 203 в зависимости от состояния логических выходов машины 371 для обработки данных.
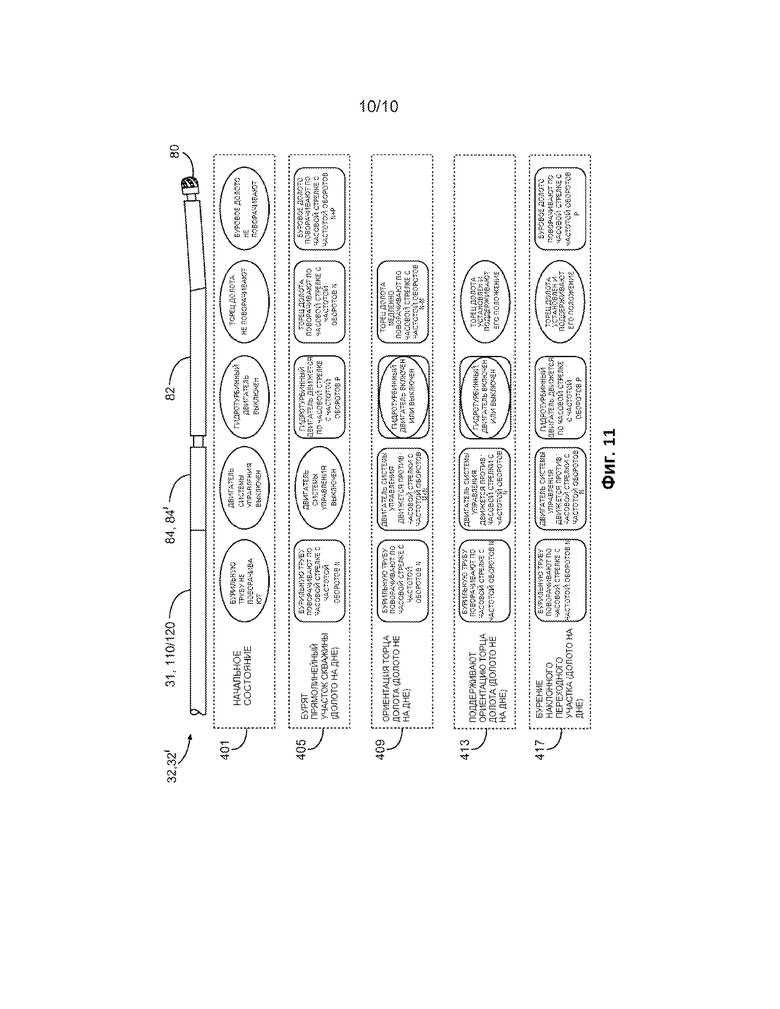
На фиг. 11 представлена блок-схема, иллюстрирующая способ бурения, соответствующий одному из вариантов осуществления. Каждый этап блок-схемы показан в виде горизонтального прямоугольника, в котором указано состояние или положение различных частей бурильной колонны 32, 32'. В частности, каждый этап обозначает поворот по отношению к подземной формации: Бурильной трубы 31, 110, 120; торца долота, определяемый ориентацией механизма 83 искривления ствола скважины забойного гидротурбинного двигателя 82; и бурового долота 80. Поворот каждого компонента изображен в форме прямоугольника, а отсутствие поворота изображено в форме овала. Кроме того, каждый этап устанавливает, движется ли двигатель 84, 84' системы управления и/или забойный гидротурбинный двигатель 82, т. e. поворачивается ли ротор каждого из двигателей относительно корпуса двигателя, независимо от того, поворачивается ли корпус двигателя относительно подземной формации. Состояние движения (ON) изображено прямоугольником, а состояние, в котором ротор не поворачивают относительно корпуса (OFF), изображено в форме овала.
Этап 401 изображает начальное состояние бурильной колонны 32, 32' перед выполнением бурения, в котором бурильную трубу 31, 110, 120 не поворачивают, а двигатель 84, 84' системы управления и забойный гидротурбинный двигатель 82 находятся в выключенном состоянии. Соответственно, не поворачивают ни один из корпусов двигателя, ни торец долота с изменением его ориентации, ни буровое долото 80.
На этапе 405 прямой участок ствола скважины выбуривают обычным роторным способом. Двигатель 84, 84' системы управления по прежнему находится в выключенном состоянии. Бурильную трубу 31, 110, 120 поворачивают по часовой стрелке с заданной частотой оборотов N, а забойный гидротурбинный двигатель 82 поворачивают по часовой стрелке с заданной частотой оборотов Р. Соответственно, корпус двигателя 84, 84' системы управления, корпус забойного гидротурбинного двигателя 82 и ориентацию торца долота поворачивают по часовой стрелке с частотой оборотов N с помощью бурильной трубы 31, 110, 120. Буровое долото 80 поворачивают по часовой стрелке с суммарной частотой оборотов N+P. Из-за поворачивания торца долота с изменением его ориентации выбуренный ствол скважины остается прямым и немного увеличен в диаметре.
Если необходимо выбурить наклонный переходной отводной участок, на этапе 409 торец долота сначала переводят в заданную ориентацию. Включают двигатель системы управления и частота оборотов его ротора против часовой стрелки нарастает до частоты оборотов М, которая в одном из вариантов осуществления может быть несколько ниже, чем частота оборотов N бурильной трубы 31, 110, 120, но поворачивание происходит в противоположном направлении. Корпус двигателя 84, 84' системы управления поворачивают по часовой стрелке с частотой оборотов N относительно формации, но корпус забойного гидротурбинного двигателя 82, который приводят в движение с помощью ротора двигателя 84, 84' системы управления, поворачивают по часовой стрелке с очень низкой частотой оборотов N-M относительно формации. Соответственно, торец долота могут медленно поворачивать, пока он не достигнет заданной ориентации. В одном из вариантов осуществления, приведенном в качестве примера, для определения того, что торец долота достиг заданной ориентации, могут применять датчик ориентации торца долота.
Когда торец долота достигает заданной ориентации, на этапе 413 заданную ориентацию поддерживают с помощью работающего двигателя 84, 84' системы управления таким образом, чтобы его ротор поворачивался против часовой стрелки с частотой оборотов N - частота оборотов, равная частоте оборотов бурильной трубы 31, 110, 120. В одном из вариантов осуществления могут применять систему управления с обратной связью с датчиком ориентации торца долота в виде части контроллера 370 двигателя, который может быть выполнен с возможностью непрерывного регулирования частоты оборотов ротора двигателя 84, 84' системы управления в сторону повышения или понижения в соответствии с необходимостью для поддержания заданной ориентации торца долота.
После установки заданной ориентации торца долота и включения забойного гидротурбинного двигателя 82 для поворота бурового долота 80 по часовой стрелке с частотой оборотов P на этапе 417 буровое долото 80 помещают на дно ствола скважины для бурения криволинейного участка ствола скважины. Когда буровое долото 80 находится на дне, реактивный момент от забойного двигателя 82 обуславливает отклонение торца долота против часовой стрелки при скручивании бурильной колонны 32, 32'. Поэтому, для управления положением торца долота изменяют частоту оборотов двигателя 84, 84' системы управления. Когда торец долота перемещают против часовой стрелки, двигатель 84, 84' системы управления движется медленнее, чем бурильная труба. Когда торец долота движется по часовой стрелке, двигатель 84, 84' системы управления должен двигаться с той же частотой оборотов или с большей частотой оборотов, чем частота оборотов бурильной трубы, для поддержания целевых значений для торца долота. Для специалиста в данной области техники будет очевидно, что эти этапы могут быть перегруппированы и переупорядочены, если это потребуется для бурения ствола скважины в соответствии с заданным планом.
Таким образом, были описаны буровая система, узел нижней части бурильной колонны и способ бурения ствола скважины. Варианты осуществления буровой системы могут, как правило, включать бурильную колонну, содержащую по меньшей мере одну бурильную трубу, узел нижней части бурильной колонны и буровое долото, причем узел нижней части бурильной колонны содержит механизм искривления ствола скважины, первый двигатель, соединенный с буровым долотом для избирательного поворачивания бурового долота в первом направлении, и двигатель системы управления, который располагают между первым двигателем и по меньшей мере одной бурильной трубой для поворачивания первого двигателя во втором направлении, противоположном первому направлению. Варианты осуществления узла нижней части бурильной колонны могут, как правило, включать буровое долото, первый двигатель, соединенный с буровым долотом для избирательного поворачивания бурового долота в первом направлении, причем первый двигатель содержит механизм искривления ствола скважины, и двигатель системы управления, соединенный с первым двигателем, причем двигатель системы управления выполнен с возможностью поворачивания в первом направлении с помощью бурильной трубы и одновременного поворачивания первого двигателя во втором направлении, противоположном первому направлению, для управления ориентацией механизма искривления ствола скважины. И наконец, варианты осуществления способа бурения ствола скважины могут, как правило, включать применение бурильной колонны, содержащей по меньшей мере одну бурильную трубу, узел нижней части бурильной колонны и буровое долото, применение внутри бурильной колонны механизма искривления ствола скважины, первого двигателя, соединенного с буровым долотом, и двигателя системы управления, который располагают между первым двигателем и по меньшей мере одной бурильной трубой, причем положение механизма искривления ствола скважины определяет ориентацию торца долота, и поворачивание по меньшей мере одной бурильной трубы в первом направлении с первой частотой оборотов с одновременным поворачиванием ротора двигателя системы управления во втором направлении, противоположном первому направлению, для управления ориентацией торца долота.
Любой из вышеуказанных вариантов осуществления может включать что-либо из следующих элементов или характеристик, по отдельности или в сочетании друг с другом: Бурильная колонна выполнена с возможностью обеспечения протекания бурового раствора в первый двигатель; первый двигатель представляет собой забойный гидротурбинный двигатель, который приводят в движение течением бурового раствора; двигатель системы управления представляет собой электродвигатель; бурильная колонна выполнена с возможностью обеспечения протекания бурового раствора к двигателю системы управления; по меньшей мере часть течения бурового раствора отводит тепло, вырабатываемое двигателем системы управления; бурильная колонна содержит внутреннюю трубу и наружную трубу, причем внутренняя труба расположена внутри наружной трубы и между ними образован канал кольцевого течения; бурильная колонна содержит устройство отклонения потока, расположенное вблизи узла нижней части бурильной колонны, которое гидравлически соединяет внутреннюю часть внутренней трубы с наружной частью наружной трубы; внутренняя труба образует первый электрический проводник, соединенный с двигателем системы управления для подвода к нему электропитания; наружная труба образует второй электрический проводник, соединенный с двигателем системы управления для подвода к нему электропитания; датчик, обеспечивающий возможность измерения частоты оборотов бурильной колонны; контроллер двигателя, функционально соединенный с датчиком и двигателем системы управления и обеспечивающий возможность управления частотой оборотов ротора двигателя системы управления на основании частоты оборотов бурильной колонны; датчик, обеспечивающий возможность измерения крутящего момента бурильной колонны; контроллер двигателя, функционально соединенный с датчиком и двигателем системы управления и обеспечивающий возможность управления крутящим моментом ротора двигателя системы управления на основании крутящего момента бурильной колонны; датчик, обеспечивающий возможность измерения ориентации торца долота; контроллер двигателя, функционально соединенный с датчиком и двигателем системы управления и обеспечивающий возможность управления двигателем системы управления на основании сигналов датчика; двигатель системы управления содержит по меньшей мере один образованный в нем путь течения флюида, который обеспечивает возможность гидравлического соединения между бурильной трубой и первым двигателем; первый двигатель представляет собой забойный гидротурбинный двигатель; двигатель системы управления представляет собой электродвигатель, который обеспечивает возможность приема электрической энергии от бурильной трубы; поворачивание бурового долота с помощью первого двигателя; поворачивание ротора двигателя системы управления с первой частотой оборотов таким образом, чтобы ориентация торца долота оставалась постоянной; поворачивание ротора двигателя системы управления со второй частотой оборотов, которая выше первой частоты оборотов, таким образом, чтобы изменить ориентацию торца долота, повернув его во втором направлении; поворачивание ротора двигателя системы управления со второй частотой оборотов, которая меньше первой частоты оборотов, таким образом, чтобы изменить ориентацию торца долота, повернув его в первом направлении; обеспечение протекания бурового раствора к первому двигателю по бурильной колонне; приведение в движение первого двигателя течением бурового раствора; двигатель системы управления представляет собой электродвигатель; приведение в движение двигателя системы управления путем подачи электрического тока посредством по меньшей мере одной бурильной трубы; и обеспечение протекания бурового раствора к двигателю системы управления через бурильную колонну и охлаждение двигателя системы управления по меньшей мере частью течения бурового раствора.
Реферат настоящего изобретения разработан исключительно для передачи его в Бюро регистрации патентов и торговых марок США и представления более широкой аудитории способа быстрого определения характера и сущности технического описания после беглого прочтения и отражает лишь один или большее количество вариантов осуществления.
Хотя подробно проиллюстрированы различные варианты осуществления, изобретение не ограничивается представленными вариантами осуществления. Для специалистов в данной области техники будут очевидны возможные усовершенствования и доработки представленных выше вариантов осуществления. Эти усовершенствования и доработки не отступают от сущности и входят в объем настоящего изобретения.
Группа изобретений относится к области наклонно-направленного бурения. Буровая система содержит бурильную колонну, содержащую по меньшей мере одну бурильную трубу и буровое долото; поверхностный привод, выполненный с возможностью вращения бурильной колонны относительно подземной формации в первом направлении; первый двигатель, установленный вдоль указанной бурильной колонны и соединенный между указанной по меньшей мере одной бурильной трубой и указанным буровым долотом с возможностью избирательного поворачивания указанного бурового долота в этом первом направлении относительно указанной по меньшей мере одной бурильной трубы при бурении прямых участков ствола скважины, причем указанный первый двигатель содержит механизм искривления, и двигатель системы управления, соединенный между указанным первым двигателем и указанной по меньшей мере одной бурильной трубой с возможностью избирательного поворачивания указанного первого двигателя во втором направлении при бурении криволинейных участков ствола скважины, которое противоположно указанному первому направлению. Обеспечивается снижение трения бурильной колонны и улучшение характеристики очистки ствола скважины. 3 н. и 17 з.п. ф-лы, 11 ил.
1. Буровая система, содержащая:
бурильную колонну, содержащую по меньшей мере одну бурильную трубу и буровое долото;
поверхностный привод, выполненный с возможностью вращения бурильной колонны относительно подземной формации в первом направлении;
первый двигатель, установленный вдоль указанной бурильной колонны и соединенный между указанной по меньшей мере одной бурильной трубой и указанным буровым долотом с возможностью избирательного поворачивания указанного бурового долота в этом первом направлении относительно указанной по меньшей мере одной бурильной трубы при бурении прямых участков ствола скважины, причем указанный первый двигатель содержит механизм искривления, и
двигатель системы управления, соединенный между указанным первым двигателем и указанной по меньшей мере одной бурильной трубой с возможностью избирательного поворачивания указанного первого двигателя во втором направлении при бурении криволинейных участков ствола скважины, которое противоположно указанному первому направлению.
2. Буровая система по п. 1, в которой:
указанная по меньшей мере одна бурильная труба имеет гидравлическую связь с указанным первым двигателем; а
указанный первый двигатель представляет собой забойный гидротурбинный двигатель.
3. Буровая система по п. 1, в которой:
указанный двигатель системы управления представляет собой электродвигатель.
4. Буровая система по п. 3, в которой:
указанная по меньшей мере одна бурильная труба имеет гидравлическую связь с указанным двигателем системы управления.
5. Буровая система по п. 1, в которой:
указанная бурильная колонна содержит внутреннюю трубу и наружную трубу, причем указанная внутренняя труба расположена внутри указанной наружной трубы и задает канал кольцевого течения между ними; а
буровая система дополнительно содержит устройство отклонения потока, которое гидравлически соединяет внутреннюю часть указанной внутренней трубы с наружной частью указанной наружной трубы.
6. Буровая система по п. 5, в которой:
указанный двигатель системы управления представляет собой электродвигатель;
указанная внутренняя труба образует первый электрический проводник, соединенный с указанным двигателем системы управления; а
указанная наружная труба образует второй электрический проводник, соединенный с указанным двигателем системы управления.
7. Буровая система по п. 1, дополнительно содержащая:
датчик частоты оборотов, соединенный с указанной бурильной колонной и выполненный с возможностью определения скорости вращения бурильной колонны;
контроллер двигателя, соединенный с указанным датчиком частоты оборотов и указанным двигателем системы управления и установленный с возможностью управления частотой оборотов ротора указанного двигателя системы управления на основании сигналов указанного датчика частоты оборотов.
8. Буровая система по п. 1, дополнительно содержащая:
датчик крутящего момента, соединенный с указанной бурильной колонной; и
контроллер двигателя, соединенный с указанным датчиком крутящего момента и указанным двигателем системы управления и установленный с возможностью управления крутящим моментом ротора указанного двигателя системы управления на основании сигналов указанного датчика крутящего момента.
9. Буровая система по п. 1, дополнительно содержащая:
датчик ориентации торца долота, соединенный с указанной бурильной колонной; и
контроллер двигателя, соединенный с указанным датчиком ориентации торца долота и указанным двигателем системы управления и установленный с возможностью управления указанным двигателем системы управления на основании указанного датчика ориентации торца долота.
10. Способ бурения ствола скважины в подземной формации, согласно которому:
обеспечивают бурильную колонну, содержащую по меньшей мере одну бурильную трубу и буровое долото;
обеспечивают первый двигатель, установленный вдоль указанной бурильной колонны и соединенный между указанной по меньшей мере одной бурильной трубой и указанным буровым долотом;
обеспечивают двигатель системы управления, соединенный между указанным первым двигателем и указанной по меньшей мере одной бурильной трубой, причем указанный первый двигатель содержит механизм искривления, причем положение указанного механизма искривления определяет ориентацию торца долота;
поворачивают указанную по меньшей мере одну бурильную трубу в первом направлении при бурении прямых участков ствола скважины с первой частотой оборотов относительно подземной формации;
управляют ориентацией указанного торца долота путем поворачивания, одновременно с поворачиванием указанной по меньшей мере одной бурильной трубы в первом направлении с первой частотой оборотов, ротора указанного двигателя системы управления во втором направлении при бурении криволинейных участков ствола скважины, которое противоположно указанному первому направлению.
11. Способ по п. 10, который дополнительно включает:
поворачивание указанного бурового долота указанным первым двигателем.
12. Способ по п. 10, который дополнительно включает:
поворачивание указанного ротора указанного двигателя системы управления с указанной первой частотой оборотов таким образом, чтобы ориентация указанного торца долота оставалась постоянной.
13. Способ по п. 10, в котором:
указанная вторая частота оборотов является большей, чем указанная первая частота оборотов, так что ориентация указанного торца долота вращается в указанном втором направлении.
14. Способ по п. 10, в котором:
указанная вторая частота оборотов является меньшей, чем указанная первая частота оборотов, так что ориентация указанного торца долота вращается в указанном первом направлении.
15. Способ по п. 10, который дополнительно включает:
обеспечение протекания бурового раствора к указанному первому двигателю по указанной бурильной колонне; и
приведение в движение указанного первого двигателя указанным течением бурового раствора.
16. Способ по п. 10, в котором:
указанный двигатель системы управления представляет собой электродвигатель; и
способ дополнительно включает приведение в движение указанного двигателя системы управления путем подачи электрического тока посредством указанной по меньшей мере одной бурильной трубы.
17. Способ по п. 10, в котором:
указанный двигатель системы управления представляет собой электродвигатель; и
способ дополнительно включает обеспечение протекания бурового раствора к указанному двигателю системы управления через указанную бурильную колонну и охлаждение указанного двигателя системы управления по меньшей мере частью указанного течения бурового раствора.
18. Узел нижней части бурильной колонны, соединяемый в буровой колонне для бурения ствола скважины в подземной формации, содержащий:
буровое долото;
первый двигатель, соединенный с указанным буровым долотом с возможностью избирательного поворачивания указанного бурового долота в первом направлении при бурении прямых участков ствола скважины, причем указанный первый двигатель содержит механизм искривления; и
двигатель системы управления, соединенный с указанным первым двигателем с возможностью избирательного поворачивания указанного первого двигателя во втором направлении при бурении криволинейных участков ствола скважины, которое противоположно указанному первому направлению,
контроллер двигателя, выполненный с возможностью определения скорости вращения бурильной колонны и управления двигателем системы управления с одинаковой величиной и противоположным по направлению по отношению к частоте оборотов бурильной колонны.
19. Узел нижней части бурильной колонны по п. 18, в котором:
указанный двигатель системы управления содержит по меньшей мере один образованный в нем путь течения флюида, который обеспечивает возможность гидравлического соединения между указанной бурильной трубой буровой колонны и указанным первым двигателем; и
указанный первый двигатель представляет собой забойный гидротурбинный двигатель.
20. Узел нижней части бурильной колонны по п. 18, в котором:
указанный двигатель системы управления представляет собой электродвигатель, который обеспечивает возможность приема электрической энергии от инвертирующей схемы, выполненной с возможностью переключения и изменения полярности тока в парах проводов в двигателе системы управления.
| US 6047784 A1, 11.04.2000 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ БУРЕНИЯ СКВАЖИНЫ И ОДНОВРЕМЕННОГО НАПРАВЛЕНИЯ БУРОВОЙ КОРОНКИ АКТИВНО УПРАВЛЯЕМОЙ ВРАЩАТЕЛЬНОЙ НАПРАВЛЯЕМОЙ БУРОВОЙ СИСТЕМОЙ И АКТИВНО УПРАВЛЯЕМАЯ ВРАЩАТЕЛЬНАЯ НАПРАВЛЯЕМАЯ СИСТЕМА | 1999 |
|
RU2239042C2 |
| УПРАВЛЕНИЕ НАКЛОННО НАПРАВЛЕННЫМ БУРЕНИЕМ С ИСПОЛЬЗОВАНИЕМ ПЕРИОДИЧЕСКОГО ВОЗМУЩАЮЩЕГО ВОЗДЕЙСТВИЯ НА БУРОВОЕ ДОЛОТО | 2009 |
|
RU2428554C1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Токарный резец | 1924 |
|
SU2016A1 |

