Изобретение относится к регулированию режимных параметров процесса бурения и может использоваться в нефтяной и газовой промышленности для автоматической подачи бурового инструмента при бурении нефтяных и газовых скважин забойным двигателем.
Известен способ контроля работы гидравлического забойного двигателя в забойных условиях, который включает замеры показаний давления в нагнетательной линии под нагрузкой и без нагрузки на долото, поддержание постоянной разницы замеренных показаний давления. При этом определяют максимально допустимую величину скорости подачи (VП дол) долота по математической формуле. Затем осуществляют замеры скорости долота и в случае ее превышения максимально допустимого значения снижают скорость до величины V п дол. (RU 2508447, опубл. 27.02.2014).
Однако, известный способ не учитывает другие важные рабочие параметры буровой установки и процесса бурения и поэтому недостаточно эффективен при бурении.
Наиболее близким к заявляемому выбран способ автоматического регулирования подачи бурового инструмента, который основан на поддержании постоянства крутящего момента на долоте и уменьшении колебаний низа бурильной колонны за счет контролирования давления в манифольдной линии. Целью данного способа является повышение долговечности бурового инструмента (RU 2013531, опубл. 30.05.1994).
Однако при осуществлении известного способа существует высокий риск возникновения аварии, так как он не позволяет ограничивать скорость подачи инструмента, в связи с чем возможны удары долота о забой и перегруз долота при резкой смене разных по твердости горных пород. Скорость бурения может быть выше скорости восходящего потока бурового раствора, что приведет к закупорке кольцевого пространства выбуренной породой. Кроме того, существует высокий риск возникновения аварии при проработке (слом бурильного инструмента), так как подача бурильного инструмента не ограничивается крутящим моментом на роторе. Так же в заявленном способе отсутствует возможность автоматической остановки талевого блока в нижнем положении.
Технический результат заключается в повышении качества и скорости бурения скважины, а также снижении аварийности и износа бурового инструмента и элементов компоновки низа бурильной колонны за счет автоматического регулирования скорости подачи бурового инструмента с учетом параметров бурения.
Сущность изобретения заключается в том, что в способе автоматического регулирования подачи бурового инструмента в процессе бурения, включающем замер величины давления промывочной жидкости (Р) в манифольдной линии, сравнение ее с заданной и максимально допустимой величинами и управление исполнительным механизмом подачи бурового инструмента в зависимости от результатов сравнения, согласно изобретению, осуществляют замер дополнительных рабочих параметров бурения, а именно, веса подвешенного бурового инструмента на крюке (G), крутящего момента (М) на роторе, расхода промывочной жидкости (Q), скорости вращения (n) колонны бурильных труб, высоты (h) талевого блока и вычисление рабочей скорости движения бурового инструмента (Vp), а также замер параметров холостого хода, а именно давления, создаваемого буровым насосом при холостом ходе (Рх), веса подвешенного бурового инструмента на крюке при холостом ходе (Gx), крутящего момента при холостом ходе (Мх) и расхода промывочной жидкости при холостом ходе (Qx).
Затем вычисляют разницу между величинами рабочих параметров и величинами параметров холостого хода, а именно, рабочий дифференциальный перепад давления ΔРp=Р-Рх, рабочую осевую нагрузку на долото gp=Gx-G, рабочий крутящий момент на роторе Мр=М-Мх, дифференциальное рабочее изменение расхода промывочной жидкости ΔQp= , причем повторяют замеры и сравнения указанных параметров после каждого очередного процесса наращивания бурового инструмента при бурении, далее по величинам n и h определяют режим работы буровой установки в текущий момент времени, в зависимости от режима бурения выбирают заданные величины параметров ΔРрз, gрз, Мрз, ΔQрз, Vрз и осуществляют сравнение их с величинами рабочих параметров ΔРp, gp, Мp, ΔQp, Vp, соответственно, после чего по результатам сравнения выделяют основной поддерживаемый параметр (ОПП) ΔРp, gp или Мр, который на минимальную величину отличается от соответствующей заданной величины в текущий момент времени, при этом если ОПП ниже, чем заданная величина, то скорость подачи бурового инструмента увеличивают, если ОПП выше, чем заданная величина, то скорость бурового инструмента снижают.
, причем повторяют замеры и сравнения указанных параметров после каждого очередного процесса наращивания бурового инструмента при бурении, далее по величинам n и h определяют режим работы буровой установки в текущий момент времени, в зависимости от режима бурения выбирают заданные величины параметров ΔРрз, gрз, Мрз, ΔQрз, Vрз и осуществляют сравнение их с величинами рабочих параметров ΔРp, gp, Мp, ΔQp, Vp, соответственно, после чего по результатам сравнения выделяют основной поддерживаемый параметр (ОПП) ΔРp, gp или Мр, который на минимальную величину отличается от соответствующей заданной величины в текущий момент времени, при этом если ОПП ниже, чем заданная величина, то скорость подачи бурового инструмента увеличивают, если ОПП выше, чем заданная величина, то скорость бурового инструмента снижают.
В случае, если разница между величиной ОПП и заданной не превышает абсолютную величину погрешности для данного параметра, скорость подачи бурового инструмента оставляют неизменной. При Vp равном Vрз не допускают ее превышения, а при отклонении величины ΔQр от ΔQрз на величину, большую чем абсолютная величина погрешности eq, подачу бурового инструмента прекращают.
Было обнаружено, что качество бурения в большой степени зависит от множества параметров, которые имеют широкий диапазон изменений в коротком промежутке времени. В известных способах управление процессом бурения происходит по одному-двум параметрам, что влечет за собой высокую аварийность. Порядка 90% всех аварий в бурении связано с человеческим фактором.
В заявляемом способе автоматического регулирования осуществляют контроль одновременно нескольких параметров бурения. Алгоритм работы системы, осуществляющий заявляемый способ, построен таким образом, чтобы ни один из параметров не вышел за установленный диапазон. В случае выхода за установленный диапазон подача бурильного инструмента прекращается, и происходит сигнализация об отклонении от заданного режима бурения с индикацией причины отклонения в строке состояния на панели оператора.
Согласно заявляемому способу необходимо одновременно измерять следующие параметры процесса: вес подвешенного бурового инструмента на крюке G, крутящий момент М на роторе, расход бурового раствора Q, скорость вращения n колонны бурильных труб, высота h талевого блока и рабочая скорость движения бурового инструмента Vp., также как и параметры холостого хода, а именно давления, создаваемого буровым насосом при холостом ходе (Рх), веса подвешенного бурового инструмента на крюке при холостом ходе (Gx), крутящего момента при холостом ходе (Мх) и расхода промывочной жидкости при холостом ходе (Qx).
Повышение механической скорости бурения согласно заявляемому способу достигается за счет того, что поддерживается дифференциальный перепад давления при бурении, это приводит к постоянству величины крутящего момента на долоте, что позволяет:
- увеличивать время контакта долота с забоем, т.е. время постоянного разрушения горной породы;
- снижать продольные колебания низа бурильной колонны и внедрять долото в горную породу с равномерной подачей;
- при необходимости увеличения крутящего момента на долоте увеличивать затрачиваемую энергию на разрушение горной породы, т.к. в случаях перемежения горных пород по твердости при затрачивании одной и той же энергии на их разрушение механическая скорость проходки будет неизбежно падать (в менее твердых породах на разрушение горной породы тратится меньше энергии, чем в твердых, и в твердых породах необходимо затрачивать большее количество энергии на разрушение горной породы).
При бурении в режиме наклонно-направленного бурения человек не в состоянии поддерживать стабильный заданный дифференциальный перепад давления длительный промежуток времени, что приводит к тому, что установка отклонителя перемещается от необходимого заданного сектора абсидальной плоскости. При перемещении отклонителя от заданной установки происходит «подрыв» низа бурильной колонны от забоя и возникает необходимость повторного выставления отклонителя в заданную абсидальную плоскость с учетом силы реактивного момента.
При бурении в автоматическом режиме по заявляемому способу отклонитель в большинстве случаев находится в заданном секторе абсидальной плоскости, что не влечет за собой повторное ориентирование отклонителя.
Повышение качества бурения позволяет при постоянстве дифференциального давления в режиме наклонно-направленного бурения поддерживать крутящий момент на породразрушающем инструменте (долоте) постоянным. Величина реактивного момента, которая действует в обратную сторону от крутящего момента, также будет постоянной, а следовательно ориентация отклонителя в абсидальной плоскости будет происходить в строго заданном секторе, не смотря на перемежающиеся в разрезе горные породы.
Снижение износа элементов бурильной колонны достигается за счет того, что:
- уменьшаются продольные колебания бурильной колонны;
- отсутствуют удары/перегрузы низа бурильной колонны о забой скважины.
Известно, что в наклонном стволе скважины под действием силы гравитации при вращении долото без движения формирует уступ (каверну). В процессе автоматизированного бурения по заявляемому способу каждой бурильной трубы/квадрата долото непрерывно находится в движении. При достижении нижнего положения трубы/квадрата система, реализующая способ, будет сигнализировать о необходимости отрыва низа буровой колонны от забоя, тем самым предотвращая формирование уступов на забое.
Отсутствие уступов влечет сохранение «вооружения» на плечевой части долота типа PDC. Сохранение вооружения достигается за счет того, что при сформированных уступах при прохождении через них долота (при наращивании, шаблонировке либо проработки ствола скважины) осевая нагрузка концентрируется именно на плечевом «вооружении», это влечет за собой скол твердосплавного «вооружения».
Кроме того, отсутствие уступов значительно облегчает спуск обсадных колонн бурильных труб в скважину, т.к. башмак обсадной колонны будет проходить по центру сформированного ствола, не упираясь в уступы.
Изобретение иллюстрируется следующими фигурами.
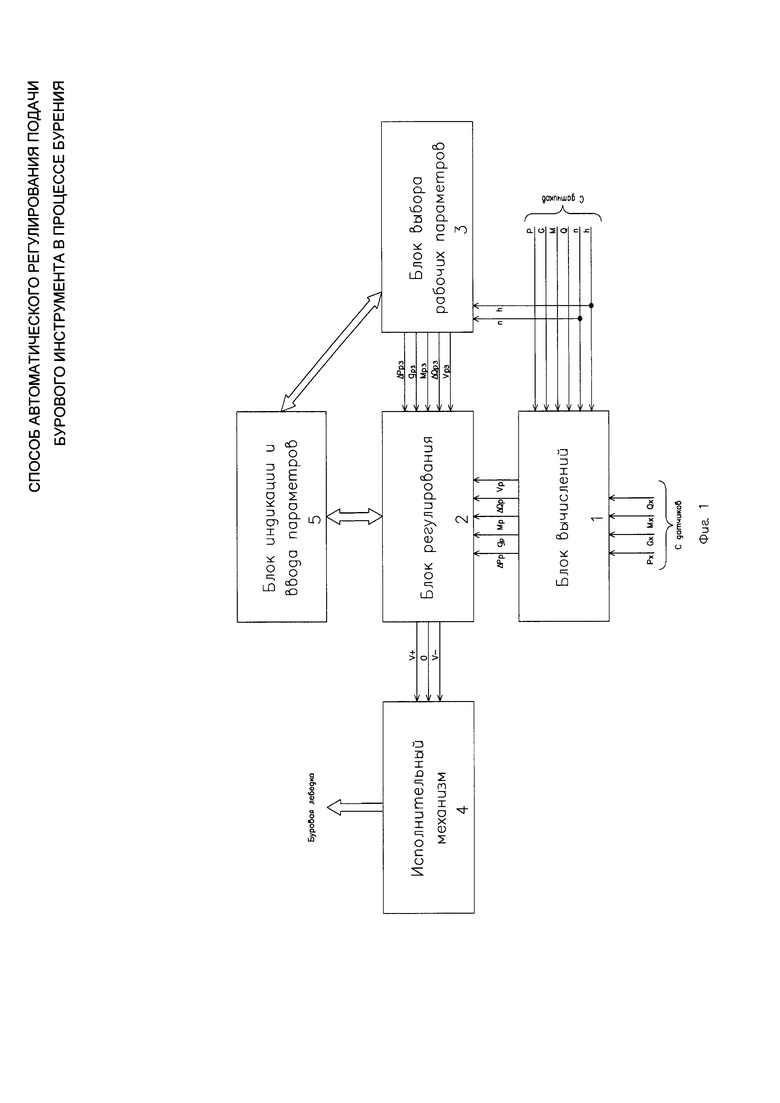
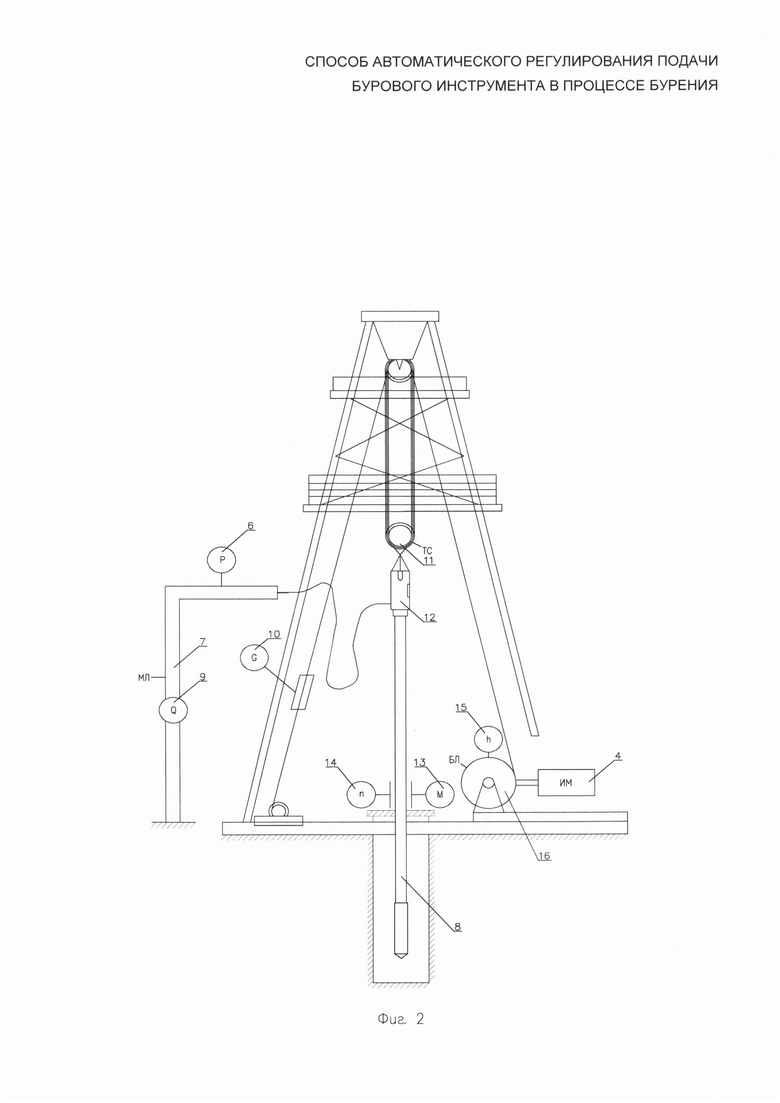
На фиг. 1 представлена схема системы, реализующей заявляемый способ. На фиг. 2 отражена схема расстановки датчиков, измеряющих параметры бурения.
Блок вычислений 1 служит для ввода данных о текущих величинах параметров, полученных с датчиков, которые размещены на буровой установке, а именно, о величинах параметров холостого хода (Qx, Мх, Gx, Рх) и о величинах h, n, Q, M, G, P на момент времени t.
Блок 1 выполняет функцию вычисления разности между текущими величинами Q, M, G, P и величинами Qx, Mx, Gx, Px, соответственно, и подает сигналы на блок регулирования 2 о величинах рабочего дифференциального перепада давления ΔРp, рабочей осевой нагрузки на долото gp, рабочего крутящего момента на роторе Мр, дифференциального изменения рабочего расхода промывочной жидкости ΔQp и скорости движения бурового инструмента Vp (dh/dt).
Блок регулирования 2 выполняет функцию обработки сигналов, поступающих с блока 1, сравнивает величины параметров с соответствующими заданными максимально допустимыми ΔРрз, gрз, Мрз, ΔQрз и Vрз, выбор которых осуществляет блок 3.
Блок 3 выбирает рабочие параметры буровой установки в текущий момент времени по параметрам n и h, поступающим с соответствующих датчиков, и подает сигнал на блок 2.
Блок 2 после поступления сигналов с блока 3 выделяет один основной поддерживающий параметр (ОПП) - ΔР либо gр, либо Мр, который на минимальную величину отличается от заданной максимально допустимой в текущий момент времени. По результатам обработки блок 2 выдает управляющий сигнал на блок 4.
Блок 4 представляет собой исполнительный механизм (ИМ), оказывающий непосредственное воздействие на вал буровой лебедки и приводящий его в действие.
Исполнительный механизм блока 4 может быть выполнен в виде ленточного тормоза с рукоятью, приводимой в движение электрической машиной, порошкового электромагнитного тормоза, либо электрической машины, управляемой при помощи электрического преобразователя. На вход блока 4 может поступать один из трех сигналов: 1) растормаживание буровой лебедки (V+); 2) затормаживание буровой лебедки (V-); 3) оставление скорости лебедки без изменения (0).
Блок индикации и ввода параметров 5 служит для отображения информации о работе системы и задания настроечных параметров. Блок 5 имеет прямую и обратную связи с блоками 2 и 3.
Датчик 6 давления (Р) установлен в линии подачи, т.е. в манифольной линии (МЛ) 7 в колонну буровых труб 8 (фиг. 2).
Датчик 9 расхода промывочной жидкости (Q) расположен в МЛ 7.
Датчик 10 веса установлен на «мертвом» конце каната талевой системы 11 и служит для измерения веса (G) подвешенного бурового инструмента 12.
Датчик 13 крутящего момента служит для измерения величины крутящего момента (М), прилагаемого к колонне бурильных труб 8 для приведения ее во вращение.
Датчик 14 оборотов бурового инструмента (n) служит для измерения скорости вращения колонны буровых труб 8.
Датчик 15 предназначен для измерения количества оборотов, совершенных барабаном лебедки 16 и преобразования его в величину h высоты талевого блока (не показан).
Заявляемый способ осуществляется следующим образом.
Перед началом буровых работ осуществляют регистрацию параметров холостого хода бурового инструмента, для чего с датчиков 6, 9, 10, 13 снимают показания величин давления, создаваемого буровым насосом при холостом ходе (Рх), веса подвешенного бурового инструмента на крюке при холостом ходе (Gx), крутящего момента при холостом ходе (Мх) и расхода промывочной жидкости при холостом ходе (Qx). Эти показания заносят во внутреннюю память блока вычислений 1.
После регистрации параметров холостого хода включают в работу буровую установку. Датчиками, установленными на буровой, в режиме реального времени t измеряют параметры ее работы.
На входы блока вычислений 1 поступают показания с датчика давления 6, расположенного в МЛ (Р), с датчика 10 веса (G) подвешенного бурового инструмента 12 на крюке, с датчика 13 величины крутящего момента (М), прилагаемого к колонне бурильных труб, с датчика 9 расхода промывочной жидкости (Q), с датчика 14 скорость вращения (n) колонны бурильных труб и с датчика 15, характеризующего высоту (h) талевого блока.
Блок вычислений 1 определяет скорость (Vp) движения бурового инструмента, вычисляя ее по формуле: Vp=dh/dt, а также рассчитывает следующие параметры:
- рабочий дифференциальный перепад давления (ΔРp): ΔРp=Р-Рх;
- рабочую осевую нагрузку на долото (gp): gр=Gx-G;
- рабочий крутящий момент на роторе (Мр): Мр=М-Мх;
- дифференциальное изменение рабочего расхода промывочной жидкости (ΔQр): ΔQp=.
Блок выбора рабочих параметров 3 по показаниям датчиков определяет режим работы (ротор, слайд, проработка), в котором на данный момент времени находится буровая установка. В соответствии с режимом работы блок 3 передает на блок регулирования 2 необходимый для этого режима набор заданных параметров, состоящий из:
- заданного рабочего дифференциального перепада давления (ΔРрз);
- заданной максимальной осевой нагрузки (gрз);
- заданного максимального крутящего момента на роторе (Мрз);
- заданного максимально допустимого изменения расхода промывочной жидкости (ΔQрз);
- заданной максимальной рабочей скорости подачи бурового инструмента (Vрз).
Оператор через блок индикации и ввода параметров 5 вводит в систему величины заданных параметров в соответствии с технологической картой процесса бурения.
Рабочие параметры (ΔРp, gp, Mp, ΔQp, Vp) и заданные параметры (ΔРрз, gрз, Мрз, ΔQрз, Vрз) поступают на входы блока регулирования 2.
Блок регулирования 2 производит выбор одного из параметров ΔРp, gр, Мр, который в текущий момент времени ближе всего находится к своему заданному значению ΔРрз, gрз, Мрз, и фиксирует его в качестве основного поддерживаемого параметра (ОПП) в текущий момент времени, по которому осуществляется регулирование. Значения параметров ΔРрз, gрз, Мрз задаются в технологической карте таким образом, чтобы в подавляющем большинстве случаев основным параметром для регулирования становился параметр ΔРp.
Когда в качестве ОПП выбрано дифференциальное рабочее давление (ΔРp), команды на исполнительный механизм 4 подаются блоком регулирования 2 по описанному ниже алгоритму.
В случае, если ΔРp<ΔРрз, блок регулирования 2 подает команду исполнительному механизму 4 на растормаживание буровой лебедки (V+), тем самым увеличивая скорость подачи бурового инструмента.
В случае, если ΔРp>ΔРрз, блок регулирования 2 подает команду исполнительному механизму 4 на затормаживание буровой лебедки (V-), тем самым уменьшая скорость подачи бурового инструмента.
В случае, если ΔРp±ev=ΔРрз с заданной погрешностью ev, блок регулирования 2 оставляет скорость подачи неизменной, на исполнительный механизм 4 поступает команда 0, в этом случае скорость подачи бурового инструмента остается неизменной.



Когда в качестве ОПП для блока регулирования 2 выбрана осевая нагрузка на долото (gр), то на исполнительный механизм 4 подаются следующие команды:



Когда в качестве ОПП выбран крутящий момент на роторе (Мр), команды на исполнительный механизм 4 будут следующими:



Блок регулирования 2 будет увеличивать скорость подачи бурового инструмента (Vp) до тех пор, пока параметр ОПП не достигнет своего заданного значения. При этом может возникнуть ситуация, когда скорость подачи бурового инструмента (Vp) достигнет максимальной величины (Vрз). В этом случае блок регулирования 2 переходит на режим поддержания заданной скорости бурения и не допускает ее превышения.
В случае, если величина дифференциального изменения рабочего расхода промывочной жидкости (ΔQp) отклонится от заданного значения (ΔQрз) больше чем на величину eq, блок регулирования 2 останавливает подачу бурового инструмента, равенство ΔQp±eq=ΔQрз не будет выполняться.
Описанный порядок работы системы осуществляется после каждого очередного процесса наращивания бурового инструмента в процессе бурения и будет выполняться непрерывно и циклично, пока есть команда на разрешение работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автоматического регулирования подачи бурового инструмента в процессе бурения и устройство для его реализации | 2019 |
|
RU2733876C2 |
| СПОСОБ И СИСТЕМА ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ БУРЕНИЕМ СКВАЖИНЫ | 2019 |
|
RU2697988C1 |
| Устройство для моделирования автоматизированной буровой установки | 1989 |
|
SU1666684A1 |
| Способ направленного бурения с коррекцией траектории скважины | 2020 |
|
RU2734915C2 |
| СПОСОБ КОНТРОЛЯ ОСЕВОЙ НАГРУЗКИ НА ДОЛОТО ПРИ БУРЕНИИ НАКЛОННО НАПРАВЛЕННЫХ СКВАЖИН ВИНТОВЫМ ЗАБОЙНЫМ ДВИГАТЕЛЕМ | 2017 |
|
RU2646651C1 |
| Способ направленного бурения с коррекцией траектории скважины | 2019 |
|
RU2738227C2 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ СКВАЖИН ЗАБОЙНЫМ ГИДРОДВИГАТЕЛЕМ | 1994 |
|
RU2065956C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ПРОЦЕССОМ БУРЕНИЯ СКВАЖИН | 2023 |
|
RU2808359C1 |
| Устройство для моделирования автоматизированной буровой установки | 1975 |
|
SU615499A1 |
| Способ вращательного бурения скважин забойным гидравлическим двигателем | 1982 |
|
SU1114777A1 |
Изобретение относится к регулированию режимных параметров процесса бурения и может использоваться в нефтяной и газовой промышленности для автоматической подачи бурового инструмента при бурении нефтяных и газовых скважин забойным двигателем. Технический результат заключается в повышении качества и скорости бурения скважины, а также снижении аварийности и износа бурового инструмента и элементов компоновки низа бурильной колонны за счет автоматического регулирования скорости подачи бурового инструмента с учетом параметров бурения. Сущность изобретения заключается в том, что осуществляют замер дополнительных рабочих параметров бурения, а именно веса подвешенного бурового инструмента на крюке (G), крутящего момента (М) на роторе, расхода промывочной жидкости (Q), скорости вращения (n) колонны бурильных труб, высоты (h) талевого блока и вычисление рабочей скорости движения бурового инструмента (Vp), а также замер параметров холостого хода, а именно давления, создаваемого буровым насосом при холостом ходе (Рх), веса подвешенного бурового инструмента на крюке при холостом ходе (Gx), крутящего момента при холостом ходе (Мх) и расхода промывочной жидкости при холостом ходе (Qx), затем вычисляют разницу между величинами рабочих параметров и величинами параметров холостого хода, а именно рабочий дифференциальный перепад давления ΔРp=Р-Рх, рабочую осевую нагрузку на долото gp=Gx-G, рабочий крутящий момент на роторе Мр=М-Мх, дифференциальное рабочее изменение расхода промывочной жидкости ΔQp= , причем повторяют замеры и сравнения указанных параметров после каждого очередного процесса наращивания бурового инструмента при бурении, далее по величинам n и h определяют режим работы буровой установки в текущий момент времени, в зависимости от режима бурения выбирают заданные максимально допустимые величины параметров ΔРрз, gрз, Мрз, ΔQрз, Vрз и осуществляют сравнение их с величинами соответствующих рабочих параметров ΔРp, gр, Мр, ΔQp, Vp, после чего по результатам сравнения выделяют основной поддерживаемый параметр (ОПП) ΔРp, gр или Мр, который на минимальную величину отличается от соответствующей заданной величины в текущий момент времени, при этом если ОПП ниже, чем заданная величина, то скорость подачи бурового инструмента увеличивают, если ОПП выше, чем заданная величина, то скорость бурового инструмента снижают, а в случае если разница между величиной ОПП и заданной не превышает абсолютную величину погрешности для данного параметра, скорость подачи бурового инструмента оставляют неизменной, при Vp равном Vрз не допускают ее превышения, а при отклонении величины ΔQр от ΔQрз на величину, большую чем абсолютная величина погрешности eq, подачу бурового инструмента прекращают. 2 ил.
, причем повторяют замеры и сравнения указанных параметров после каждого очередного процесса наращивания бурового инструмента при бурении, далее по величинам n и h определяют режим работы буровой установки в текущий момент времени, в зависимости от режима бурения выбирают заданные максимально допустимые величины параметров ΔРрз, gрз, Мрз, ΔQрз, Vрз и осуществляют сравнение их с величинами соответствующих рабочих параметров ΔРp, gр, Мр, ΔQp, Vp, после чего по результатам сравнения выделяют основной поддерживаемый параметр (ОПП) ΔРp, gр или Мр, который на минимальную величину отличается от соответствующей заданной величины в текущий момент времени, при этом если ОПП ниже, чем заданная величина, то скорость подачи бурового инструмента увеличивают, если ОПП выше, чем заданная величина, то скорость бурового инструмента снижают, а в случае если разница между величиной ОПП и заданной не превышает абсолютную величину погрешности для данного параметра, скорость подачи бурового инструмента оставляют неизменной, при Vp равном Vрз не допускают ее превышения, а при отклонении величины ΔQр от ΔQрз на величину, большую чем абсолютная величина погрешности eq, подачу бурового инструмента прекращают. 2 ил.
Способ автоматического регулирования подачи бурового инструмента в процессе бурения, включающий замер величины давления промывочной жидкости (Р) в манифольдной линии, сравнение ее с заданной и максимально допустимой величинами и управление исполнительным механизмом подачи бурового инструмента в зависимости от результатов сравнения, отличающийся тем, что осуществляют замер дополнительных рабочих параметров бурения, а именно веса подвешенного бурового инструмента на крюке (G), крутящего момента (М) на роторе, расхода промывочной жидкости (Q), скорости вращения (n) колонны бурильных труб, высоты (h) талевого блока и вычисление рабочей скорости движения бурового инструмента (Vp), а также замер параметров холостого хода, а именно давления, создаваемого буровым насосом при холостом ходе (Рх), веса подвешенного бурового инструмента на крюке при холостом ходе (Gx), крутящего момента при холостом ходе (Мх) и расхода промывочной жидкости при холостом ходе (Qx), затем вычисляют разницу между величинами рабочих параметров и величинами параметров холостого хода, а именно рабочий дифференциальный перепад давления ΔPp=Р-Px, рабочую осевую нагрузку на долото gp=Gx-G, рабочий крутящий момент на роторе Мр=М-Мх, дифференциальное рабочее изменение расхода промывочной жидкости ΔQp= , причем повторяют замеры и сравнения указанных параметров после каждого очередного процесса наращивания бурового инструмента при бурении, далее по величинам n и h определяют режим работы буровой установки в текущий момент времени, в зависимости от режима бурения выбирают заданные максимально допустимые величины параметров ΔРрз, gpз, Мрз, ΔQpз, Vpз и осуществляют сравнение их с величинами соответствующих рабочих параметров ΔPp, gp, Мр, ΔQp, Vp, после чего по результатам сравнения выделяют основной поддерживаемый параметр (ОПП) ΔPp, gp или Mp, который на минимальную величину отличается от соответствующей заданной величины в текущий момент времени, при этом если ОПП ниже, чем заданная величина, то скорость подачи бурового инструмента увеличивают, если ОПП выше, чем заданная величина, то скорость бурового инструмента снижают, а в случае если разница между величиной ОПП и заданной не превышает абсолютную величину погрешности для данного параметра, скорость подачи бурового инструмента оставляют неизменной, при Vp равном Vpз не допускают ее превышения, а при отклонении величины ΔQp от ΔQpз на величину, большую чем абсолютная величина погрешности eq, подачу бурового инструмента прекращают.
, причем повторяют замеры и сравнения указанных параметров после каждого очередного процесса наращивания бурового инструмента при бурении, далее по величинам n и h определяют режим работы буровой установки в текущий момент времени, в зависимости от режима бурения выбирают заданные максимально допустимые величины параметров ΔРрз, gpз, Мрз, ΔQpз, Vpз и осуществляют сравнение их с величинами соответствующих рабочих параметров ΔPp, gp, Мр, ΔQp, Vp, после чего по результатам сравнения выделяют основной поддерживаемый параметр (ОПП) ΔPp, gp или Mp, который на минимальную величину отличается от соответствующей заданной величины в текущий момент времени, при этом если ОПП ниже, чем заданная величина, то скорость подачи бурового инструмента увеличивают, если ОПП выше, чем заданная величина, то скорость бурового инструмента снижают, а в случае если разница между величиной ОПП и заданной не превышает абсолютную величину погрешности для данного параметра, скорость подачи бурового инструмента оставляют неизменной, при Vp равном Vpз не допускают ее превышения, а при отклонении величины ΔQp от ΔQpз на величину, большую чем абсолютная величина погрешности eq, подачу бурового инструмента прекращают.
| РЕГУЛЯТОР ПОДАЧИ БУРОВОГО ИНСТРУМЕНТА | 1991 |
|
RU2013531C1 |
| Регулятор подачи бурового инструмента | 1987 |
|
SU1439232A1 |
| СПОСОБ КОНТРОЛЯ ОСЕВОЙ НАГРУЗКИ НА ДОЛОТО ПРИ БУРЕНИИ ГОРИЗОНТАЛЬНЫХ И НАКЛОННО-НАПРАВЛЕННЫХ СКВАЖИН ВИНТОВЫМ ЗАБОЙНЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2361055C1 |
| US 4491186 A1, 01.01.1985 | |||
| Система для автоматического регулирования подачи бурового инструмента | 1977 |
|
SU726295A1 |

