Изобретение относится к медицинской технике, а более конкретно к физиотерапевтическим устройствам для снятия напряжений со скелетной мускулатуры, разгрузки нервных окончаний, восстановления межпозвоночных дисков и коррекции взаимного положения позвонков.
Из достигнутого уровня техники известно устройство для вытяжения и удлинения позвоночника, содержащее три опорных основания, расположенных последовательно вдоль продольной оси устройства и предназначенных для размещения на них соответственно: а) головы и верней части туловища пользователя, б) нижней части туловища и верхней части ног пользователя и в) голеней ног пользователя. На верхней поверхности первого опорного основания последовательно вдоль продольной оси устройства размещены: два ролика для головы, два ролика для шеи, а также два ряда роликов для верхней части туловища пользователя, при этом ролики одного ряда расположены попарно напротив роликов другого ряда. Упомянутые ролики для головы, шеи, а также каждая пара роликов для верхней части туловища расположены симметрично относительно продольной оси устройства. На верхней поверхности второго опорного основания размещены: два ряда роликов для нижней части туловища пользователя и четыре ряда роликов для верхней части его ног, при этом два ряда роликов для нижней части туловища пользователя расположены аналогично упомянутым двум рядам роликов для верхней части его туловища, а четыре ряда роликов для верхней части ног пользователя расположены попарно симметрично относительно продольной оси устройства. На верхней поверхности третьего опорного основания размещены четыре ряда роликов для голеней ног пользователя, которые расположены попарно симметрично относительно продольной оси устройства. Первое и второе опорные основания размещены с продольным зазором относительно друг друга и снабжены средствами для изменения взаимного углового положения их верхних поверхностей, а обращенные друг к другу края второго и третьего опорных оснований шарнирно соединен между собой (US 3881469 Kanemitsu S., 1975).
Недостаток этого устройства заключается в том, что используемые в нем средства для приложения к пользователю растягивающего усилия, не обеспечивают высокой эффективности устройства вследствие рефлекторного сопротивления мышц пользователя создаваемому упомянутыми средствами растяжению. Кроме того, выполнение опорных элементов в виде роликов не оказывает влияния на продольное вытяжение позвоночника, поскольку ролики выполняют только функцию массажных элементов. Другой недостаток приведенного выше аналога заключается в том, что он имеет сложную конструкцию и большие весогабаритные параметры.
В качестве прототипа взято устройство для вытяжения и удлинения позвоночника, содержащее горизонтально расположенную прямоугольную раму, выполненную в виде двух одинаковых и параллельных между собой продольных элементов удлиненной формы, одноименные концы которых соединены между собой соответственно первой и второй концевыми поперечинами, а также расположенные последовательно вдоль продольной оси рамы панель для головы с шейным выступом, пружинящее основание и панель для голеней ног. Пружинящее основание закреплено на раме, а каждая упомянутая панель закреплена на соответствующем ей основании с обеспечением возможности под действием внешней нагрузки упругого смещения ее в направлении от пружинящего основания, при этом каждое основание установлено на продольных элементах рамы с обеспечением возможности перемещения вдоль ее продольной оси и фиксации в заданном положении. Каждая панель закреплена на соответствующем ей основании посредством двух пар П-образных скоб, при этом верхние и нижние полки П-образных скоб шарнирно соединены соответственно с панелью и основанием. Пружинящее основание выполнено в виде параллельных между собой жестких опорных элементов, расположенных с зазором относительно друг друга, последовательно вдоль продольных элементов рамы и по обе стороны относительно поясничного упора, закрепленного также на продольных элементах рамы. Каждый жесткий опорный элемент снабжен двумя изогнутыми стойками, каждая из которых посредством двух пар шайб и гаек закреплена на соответствующей ей гибкой ленте (на соответствующем продольном несущем элементе), при этом жесткие опорные элементы закреплены на гибких лентах с обеспечением наклона их в сторону от поясничного упора, а каждая лента выполнена в виде кольца, закрепленного на концевых поперечных элементах рамы. (RU 2147426 (С1), Костанбаев B.C., 2000).
Однако прототип характеризуется невысокой износостойкостью используемого в нем пружинящего основания. Этот недостаток прототипа обусловлен тем, что крепление нижних концов упомянутых изогнутых стоек к гибким лентам (продольным несущим элементам) осуществляется посредством двух шайб и двух гаек, попарно расположенных по обе стороны ленты. В этом случае при обусловленном весом пользователя наклоне изогнутых стоек возникают большие локальные напряжения в материале лент в местах контакта их с краями упомянутых шайб, а возникновение в процессе эксплуатации устройства больших локальных напряжений в материале гибких лент неизбежно приводит к нарушению целостности материла лент в местах соединения их с нижним концом каждой изогнутой стойки. Нарушение же целостности материла лент в местах соединения их с нижним концом каждой изогнутой стойки приводит не только к снижению износостойкости пружинящего основания устройства, но и к уменьшению длительности межремонтных интервалов, так как нарушение целостности материала гибкой ленты (например, при возникновении в нем трещин) в области соединения хотя бы одной изогнутой стойки с соответствующей ей гибкой лентой приводит к необходимости ее замены вследствие возникновения дискомфорта при проведении процедур, поскольку при проведении процедур угловое положение упомянутой изогнутой стойки будет отличаться от углового положения изогнутой стойки, соединенной с тем же жестким опорным элементом. Замена же ленты в известном из прототипа устройстве сопряжена с необходимостью не только демонтажа всех соединенных с ней изогнутых стоек, но и выполнения в новой ленте ряда отверстий для закрепления соответствующих ей изогнутых стоек. Иными словами, проведение ремонта пружинящего основания устройства, взятого в качестве прототипа, сопряжено со значительными затратами труда, времени, а также высокой стоимостью заменяемого при ремонте невосстанавливаемого изделия (гибкой ленты). Из вышесказанного можно сделать вывод о невысокой ремонтопригодности известного из прототипа устройства для вытяжения и удлинения позвоночника. Кроме того, поскольку в процессе эксплуатации гибкие ленты подвержены воздействию достаточно больших растягивающих нагрузок, то за счет неизбежной остаточной деформации материала гибких лент это приводит к изменению во времени величины их натяжения. Изменение же величины натяжения гибких лент приводит к изменению величины вытягивающего усилия, возникающего в результате принудительного (обусловленного весом пользователя) наклона опорных элементов пружинящего основания в направлении от поясничного упора. Следовательно, при эксплуатации известного из прототипа устройства необходимо проводить достаточно частый контроль величины натяжения гибких лент, а также (для исключения перекоса жестких опорных элементов во время проведения процедур) обеспечивать с достаточно высокой точностью равенство натяжений гибких лент. В результате увеличивается и стоимость технического обслуживания известного из прототипа устройства.
Настоящее изобретение направлено на решение технической проблемы, заключающейся в повышении ремонтопригодности пружинящего основания устройства для вытяжения и удлинения позвоночника.
Согласно первому варианту поставленная техническая проблема решена тем, что в устройстве для вытяжения и удлинения позвоночника, содержащем горизонтально расположенную прямоугольную раму, в виде двух продольных элементов, одноименные концы которых соединены между собой соответствующей концевой поперечиной, а также расположенные последовательно вдоль продольной оси симметрии рамы панель для головы с шейным выступом, пружинящее основание и панель для голеней ног, при этом пружинящее основание включает два одинаковых продольных несущих элемента, которые расположены напротив друг друга и закреплены на раме, а также параллельные между собой жесткие опорные элементы, расположенные с зазором относительно друг друга последовательно вдоль продольных элементов рамы и по обе стороны относительно поясничного упора, при этом каждая упомянутая панель закреплена на соответствующем ей основании, а каждое основание установлено на продольных элементах рамы с обеспечением возможности перемещения вдоль ее продольной оси симметрии и фиксации в заданном положении, согласно изобретению, продольные несущие элементы пружинящего основания выполнены в виде жестких боковин, которые расположены над соответствующим каждой из них продольным элементом рамы и закреплены на нем, при этом пружинящее основание включает также закрепленные с возможностью съема на ее боковинах одинаковые модули, количество которых равно числу упомянутых жестких опорных элементов в пружинящем основания, при этом модули расположены перпендикулярно боковинам пружинящего основания, последовательно вдоль продольной оси симметрии рамы и по обе стороны относительно упомянутого поясничного упора, который расположен перпендикулярно боковинам и закреплен на них, каждый модуль содержит корпус, включающий горизонтально расположенную верхнюю стенку, вертикально расположенную переднюю стенку, нижнюю стенку, имеющую форму полого кругового цилиндра с горизонтально расположенной осью, усеченного сбоку двумя секущими плоскостями, расположенными по радиусу и под углом а относительно друг друга, а также две оппозитно расположенные одинаковые вертикальные боковые стенки, выполненные с верхним выступом, смещенным в сторону тыльного края соответствующей боковой стенки, при этом в каждой боковой стенке корпуса выполнено сквозное отверстие, расположенное соосно оси внешней и внутренней цилиндрических поверхностей нижней стенки корпуса и, по крайней мере, частично в пределах соответствующего каждому из них выступа, а в каждом упомянутом сквозном отверстии размещен соответствующий ему конец боковой оси, напротив которой с обеспечением минимально возможной величины зазора между обращенными друг к другу поверхностями расположен тыльный торец верхней стенки, каждый модуль содержит также два одинаковых держателя, каждый из которых выполнен в виде углового рычага, включающего верхний и нижний элементы, а также ограничительный упор, при этом держатели размещены в соответствующем каждому из них угловом прямоугольном вырезе, выполненном со стороны тыльного края верхней стенки корпуса, и установлены на боковой оси с обеспечением возможности свободного поворота, при этом концевые участки верхних элементов держателей соединены между собой посредством горизонтально расположенного жесткого опорного элемента, а на размещенных в полости корпуса нижних элементах держателей закреплена лопатка, выполненная в виде плоской пластины, при этом две стороны пластины, имеющие наибольшую площадь поверхности, расположены симметрично относительно плоскости, в которой лежит ось внешней и внутренней цилиндрических поверхностей нижней стенки корпуса, причем лопатка выполнена с размерами, обеспечивающими минимально возможный гарантированный зазор по всему ее периметру, а ограничительный упор каждого держателя выполнен с обеспечением возможности взаимодействия его с внешней поверхностью верхней стенки корпуса и расположен под углом β относительно верхнего элемента соответствующего ему держателя, являющимся углом, дополнительным до 180° к заданному начальному углу γ наклона верхних элементов держателей относительно плоскости рамы, верхний и нижний элементы каждого держателя расположены под углом относительно друг друга, обеспечивающим, при расположении верхних элементов держателей относительно плоскости рамы под упомянутым углом γ, расположение нижнего торца лопатки напротив нижней стенки корпуса, а упомянутый угол α между расположенными по радиусу двумя секущими плоскостями больше диапазона изменения во время проведения процедур угла наклона верхних элементов держателей, в полости корпуса с обеспечением в исходном положении контакта с внутренними поверхностями верхней, передней, нижней стенок корпуса и лопаткой размещена эластичная замкнутая камера удлиненной формы, заполненная находящимся под давлением газом и обеспечивающая в начальном положении держателей прижим их ограничительных упоров к внешней поверхности верхней стенки корпуса, при этом каждый модуль выполнен с двумя горизонтально расположенными боковыми полками, которые расположены на соответствующей каждой из них боковине пружинящего основания и разъемно соединены с ними, а модули закреплены на боковинах пружинящего основания с обеспечением наклона соответствующего каждому из них жесткого опорного элемента в сторону от поясничного упора.
Кроме того, поставленная техническая проблема решена тем, что в одном предпочтительном воплощении изобретения верхняя, передняя и нижняя стенки корпуса выполнены за одно целое, а в другом - верхняя стенка корпуса выполнена с загнутым вниз передним краем.
Согласно второму варианту поставленная техническая проблема решена тем, что в устройстве для вытяжения и удлинения позвоночника, содержащем горизонтально расположенную прямоугольную раму, в виде двух параллельных между собой продольных элементов, одноименные концы которых соединены между собой соответствующей концевой поперечиной, а также расположенные последовательно вдоль продольной оси симметрии рамы панель для головы с шейным выступом, пружинящее основание и панель для голеней ног, при этом пружинящее основание включает два одинаковых продольных несущих элемента, которые расположены напротив друг друга и закреплены на раме, а также параллельные между собой жесткие опорные элементы, расположенные с зазором относительно друг друга последовательно вдоль продольных элементов рамы и по обе стороны относительно поясничного упора, при этом каждая упомянутая панель закреплена на соответствующем ей основании, а каждое основание установлено на продольных элементах рамы с обеспечением возможности перемещения вдоль ее продольной оси симметрии и фиксации в заданном положении, согласно изобретению продольные несущие элементы пружинящего основания выполнены в виде жестких боковин, которые расположены над соответствующим каждой из них продольным элементом рамы и закреплены на нем, при этом пружинящее основание включает также закрепленные с возможностью съема на ее боковинах одинаковые модули, количество которых равно числу упомянутых жестких опорных элементов в пружинящем основания, при этом модули расположены перпендикулярно боковинам пружинящего основания, последовательно вдоль продольной оси симметрии рамы и по обе стороны относительно упомянутого поясничного упора, который расположен перпендикулярно боковинам и закреплен на них, а каждый модуль содержит корпус, включающий горизонтально расположенную верхнюю стенку с загнутым вниз передним краем, вертикально расположенную переднюю стенку, нижнюю стенку, имеющую форму полого кругового цилиндра с горизонтально расположенной осью, усеченного сбоку двумя секущими плоскостями, расположенными по радиусу и под углом а относительно друг друга, и две оппозитно расположенные одинаковые вертикальные боковые стенки, в каждой из которых выполнено сквозное отверстие, при этом упомянутые сквозные отверстия расположены соосно оси внешней и внутренней цилиндрических поверхностей нижней стенки корпуса, а в каждом упомянутом сквозном отверстии размещен соответствующий конец боковой оси, верхняя стенка корпуса расположена над боковой осью с обеспечением минимально возможного расстояния между ее внутренней поверхностью и боковой осью, а каждый модуль содержит также два одинаковых держателя, каждый из которых выполнен в виде углового рычага, включающего верхний и нижний элементы, а также ограничительный упор, при этом держатели размещены в соответствующем каждому из них прямоугольном вырезе, выполненным со стороны тыльного края верхней стенки корпуса, и установлены на боковой оси с обеспечением возможности свободного поворота, причем концевые участки верхних элементов держателей соединены между собой посредством горизонтально расположенного жесткого опорного элемента, а на размещенных в полости корпуса нижних элементах держателей закреплена лопатка, выполненная в виде плоской пластины, при этом лопатка выполнена с размерами, обеспечивающими минимально возможный гарантированный зазор по всему ее периметру, а две стороны пластины, имеющие наибольшую площадь поверхности, расположены симметрично относительно плоскости, в которой лежит ось внешней и внутренней цилиндрических поверхностей нижней стенки корпуса, а ограничительный упор каждого держателя выполнен с обеспечением возможности взаимодействия его с поверхностью поперечной стенки соответствующего ему и упомянутого прямоугольного выреза, выполненного в верхней стенке корпуса, и расположен под углом β относительно верхнего элемента соответствующего ему держателя, и являющимся дополнительным до 180° к заданному начальному углу γ наклона верхних элементов держателей относительно плоскости рамы, верхний и нижний элементы каждого держателя расположены под углом относительно друг друга, обеспечивающим, при расположении верхних элементов держателей относительно плоскости рамы под углом, равным начальному углу γ наклона, расположение нижнего торца лопатки напротив нижней стенки корпуса, а упомянутый угол α между расположенными по радиусу двумя секущими плоскостями больше диапазона изменения во время проведения процедур угла наклона верхних элементов держателей, в полости корпуса с обеспечением в исходном положении контакта с внутренними поверхностями верхней, передней, нижней стенок корпуса и лопаткой размещена эластичная замкнутая камера удлиненной формы, заполненная находящимся под давлением газом, обеспечивающая в начальном положении держателей прижим их ограничительных упоров к поверхности поперечной стенки соответствующего каждому из них упомянутого прямоугольного выреза, каждый модуль выполнен с двумя горизонтально расположенными боковыми полками, которые расположены на соответствующей каждой из них боковине пружинящего основания и разъемно соединены с ними, а модули закреплены на боковинах с обеспечением наклона соответствующего каждому из них жесткого опорного элемента в сторону от поясничного упора.
Кроме того, поставленная техническая проблема решена тем, что в одном предпочтительном воплощении изобретения верхняя, передняя и нижняя стенки корпуса выполнены за одно целое, а боковые полки выполнены в виде двух оппозитно расположенных участков, являющимися продолжением горизонтально расположенного участка верхней стенки корпуса и удлиняющими его в направлении, параллельном боковой оси.
В другом предпочтительном воплощении изобретения каждая боковая стенка выполнена с верхним выступом, расположенным над соответствующим сквозным отверстием, выполненным в боковой стенке.
Преимущество патентуемого устройства для вытяжения и удлинения позвоночника (по сравнению с прототипом) заключается в том, что, благодаря:
- патентуемому выполнению пружинящего основания в виде закрепленные на боковинах пружинящего основания с возможностью съема одинаковых модулей, количество которых равно числу жестких опорных элементов в пружинящем основания и которые расположены перпендикулярно боковинам, последовательно вдоль продольной оси симметрии рамы и по обе стороны относительно поясничного упора, обеспечивается достижение технических результатов, заключающихся в минимизации затрат труда и времени не только на демонтаж неисправного модуля, но и на последующий монтаж отремонтированного модуля;
- простой конструкции описанных выше двух вариантов патентуемых модулей обеспечивается также достижение технических результатов, заключающихся в минимизации затрат труда и времени не только на разборку (без использования ни специальных инструментов, ни специальной оснастки, поскольку при разборке модуля достаточно извлечь боковую ось) неисправного модуля, но и его сборку после замены в нем невосстанавливаемого изделия (эластичной замкнутой камеры удлиненной формы);
- существенному снижению стоимости невосстанавливаемых изделий (стоимость эластичных замкнутых камер существенно ниже стоимости гибких лент),
обеспечивается достижение упомянутых технических результатов, которые в совокупности, как известно (см. Автоматизация производства и промышленная электроника, М. ГНИ "Советская энциклопедия", т. 2, 1963, с. 348), обеспечивают достижение технического результата, заключающегося в повышении ремонтопригодности патентуемого устройства по сравнению с прототипом, свидетельствующего о решении поставленной технической проблемы.
Остальные технические результаты, достигаемые при осуществлении патентуемого изобретения, станут ясными из дальнейшего подробного, ссылками на чертежи описания конкретных примеров, которые, однако, не является единственно возможными, но наглядно демонстрируют возможность достижения упомянутых технических результатов патентуемой совокупностью существенных признаков.
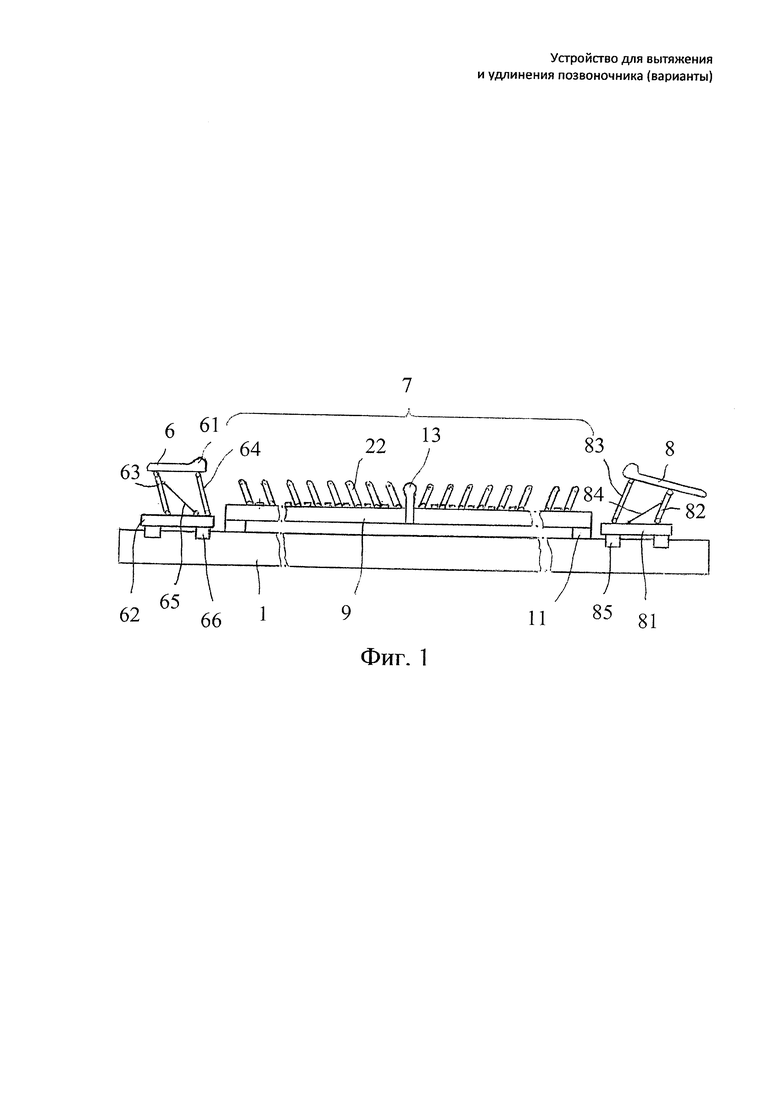
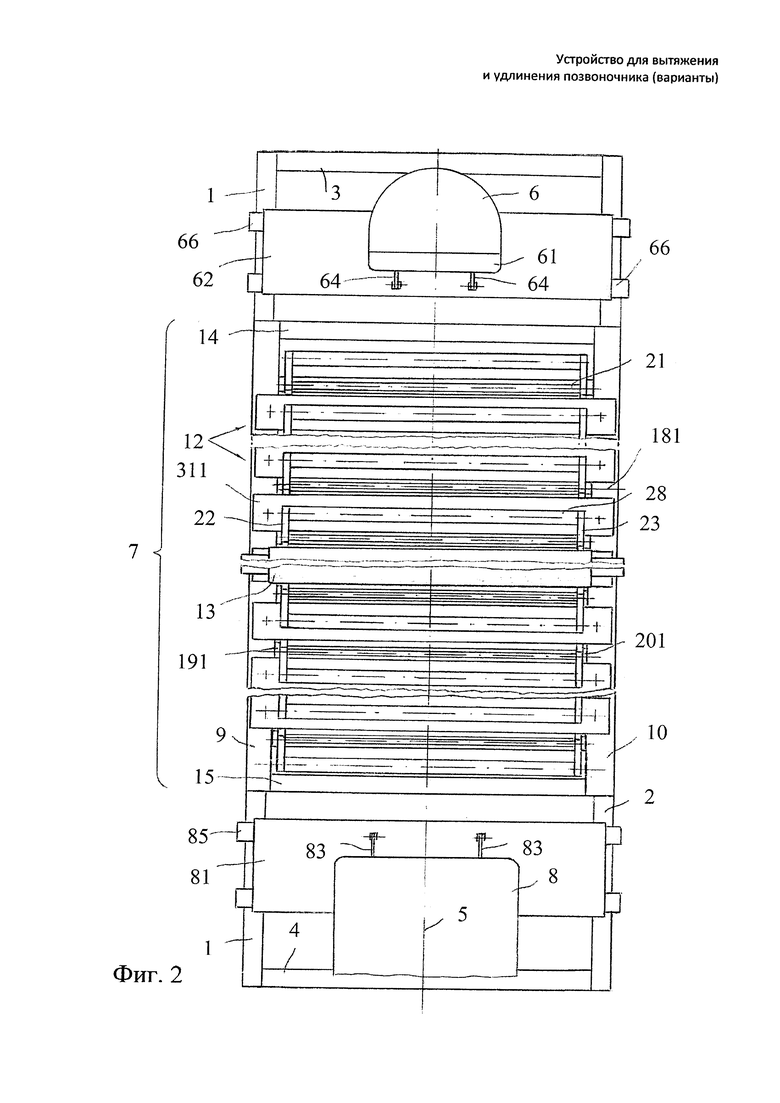
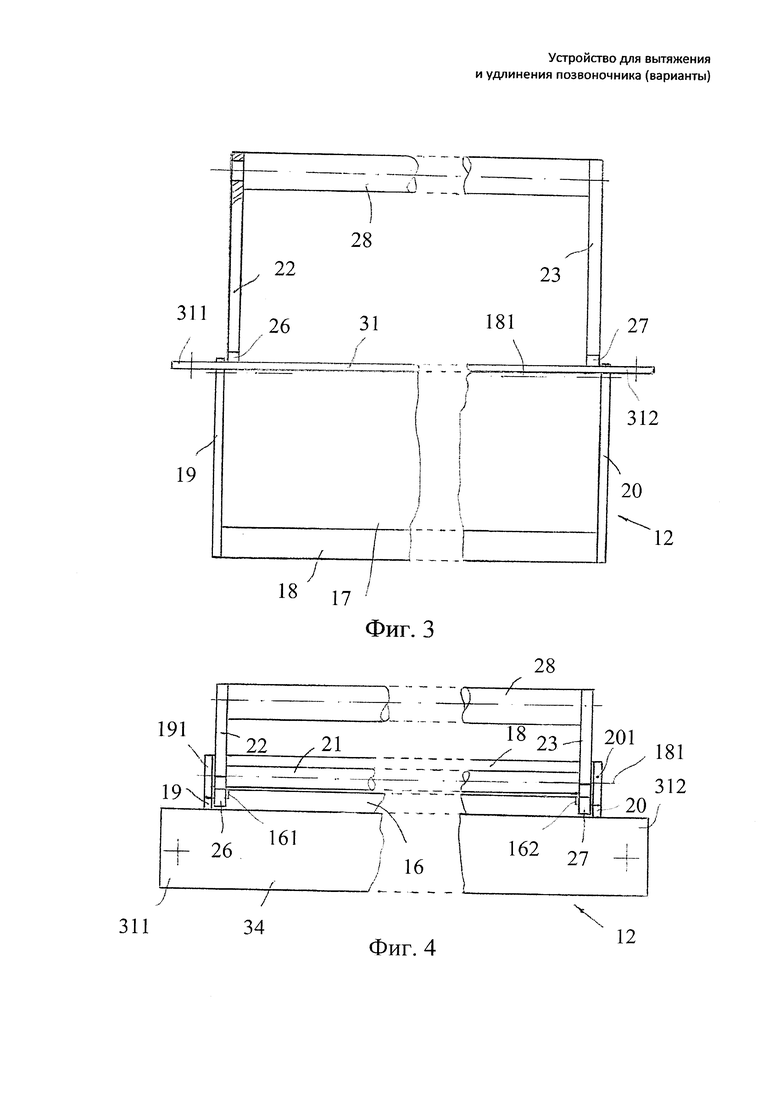
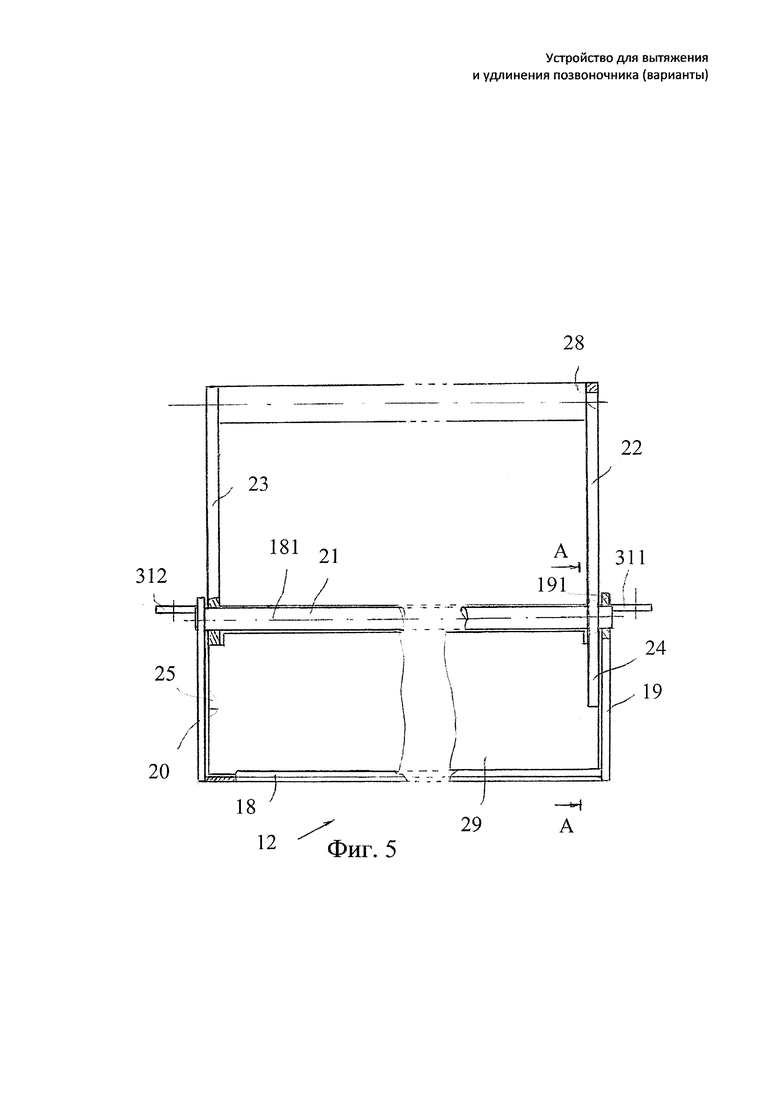
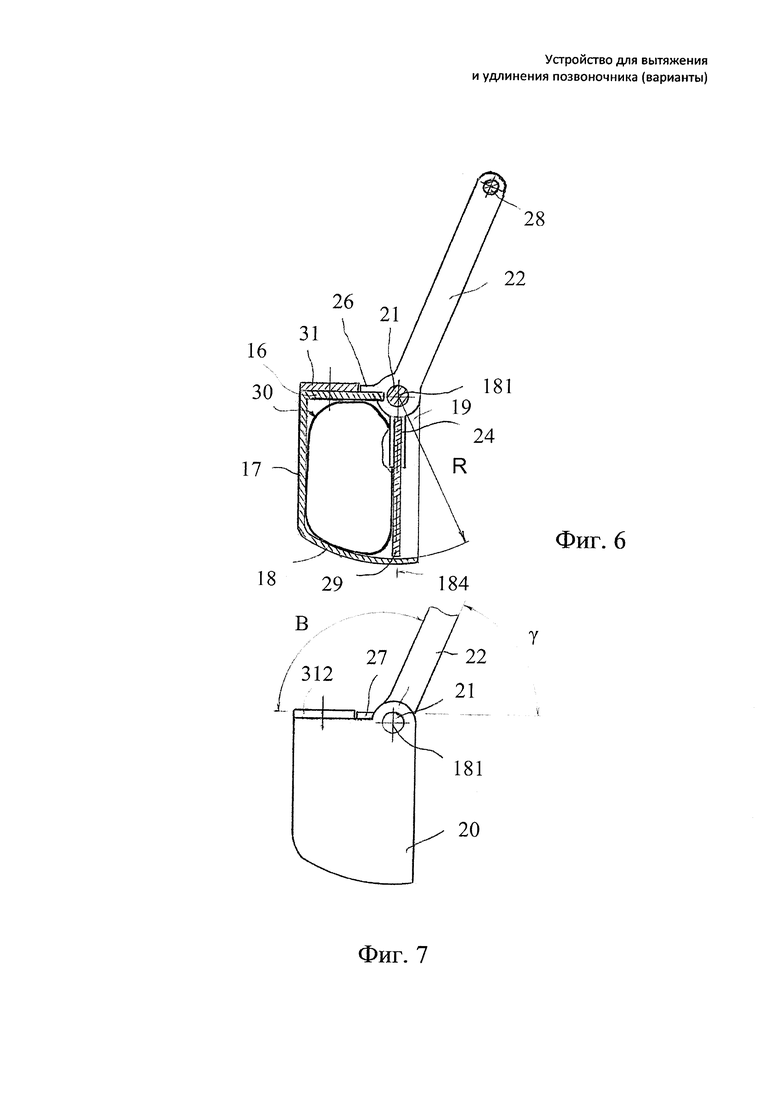
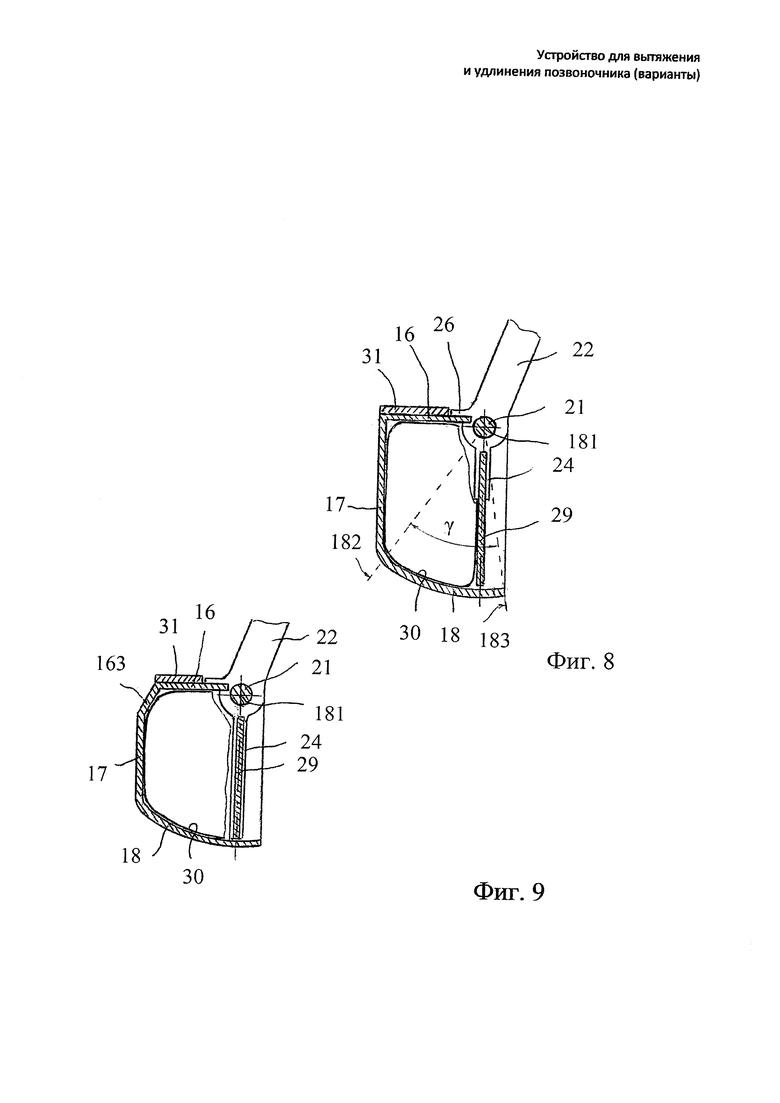
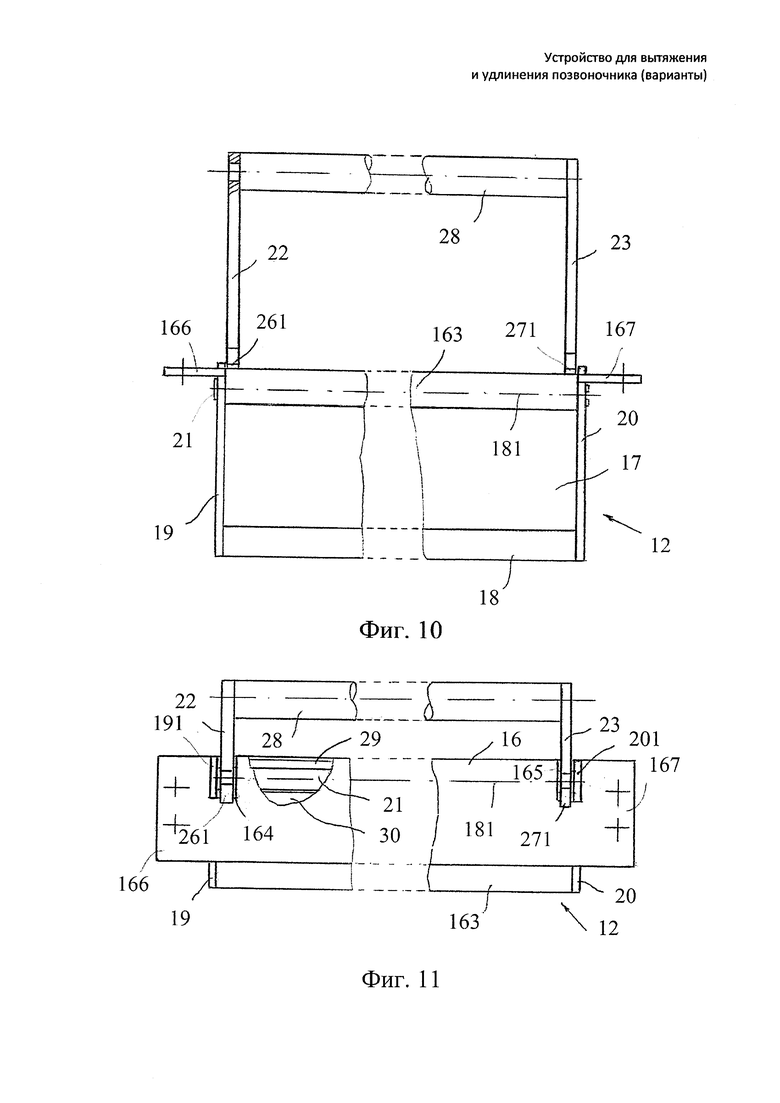
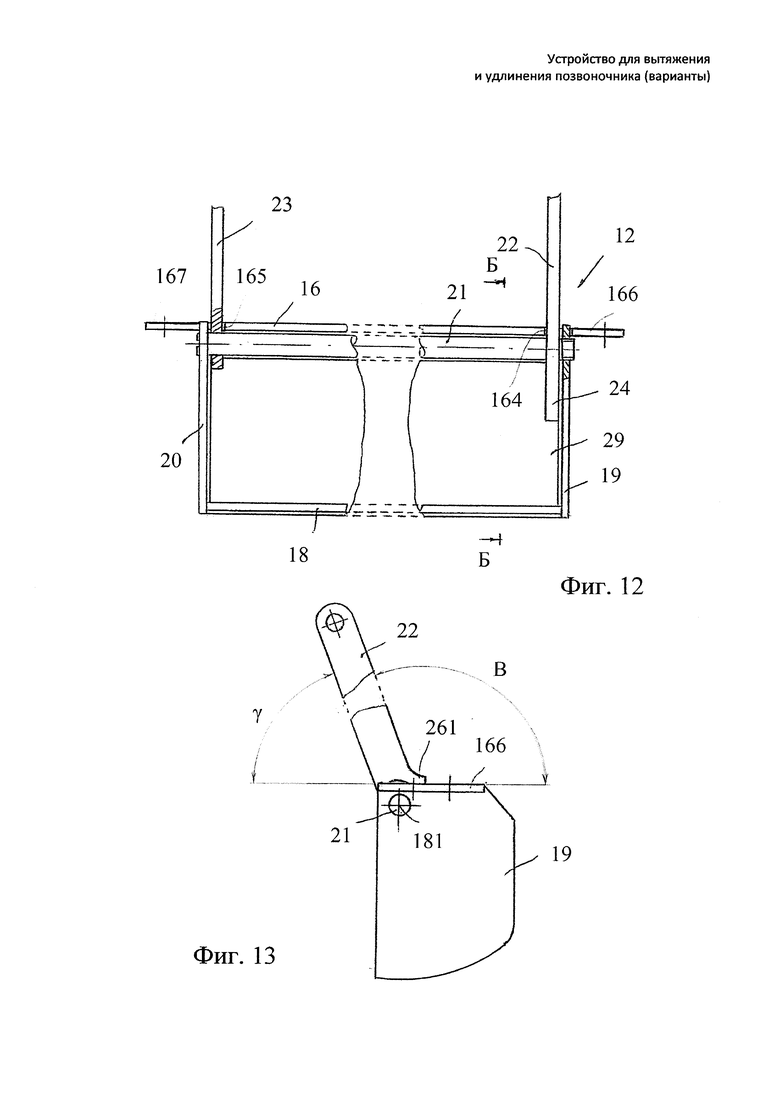
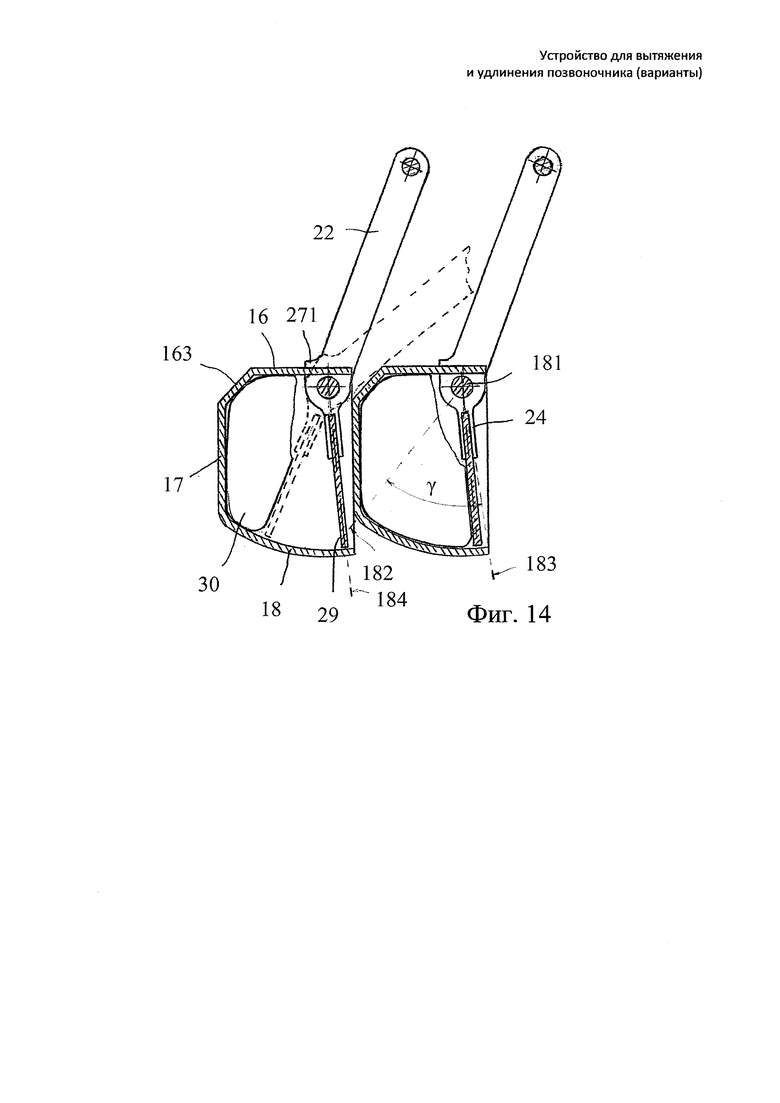
На фиг. 1 схематично изображено устройство для вытяжения и удлинения позвоночника, трех фрагментированный вид сбоку; на фиг. 2 - то же, вид сверху, увеличено и повернуто; на фиг. 3, 4 и 5 - модуль пружинящего основания согласно первому варианту, соответственно вид спереди, вид сверху и вид сзади; на фиг. 6 и 7 - соответственно вид по А-А и вид сбоку фиг. 5; на фиг. 8 - то же, что и на фиг. 6 при другом расположении верхней стенки корпуса модуля пружинящего основания относительно оси; на фиг. 9 - то же, что и на фиг. 8 в случае выполнения верхней стенки корпуса модуля пружинящего основания с загнутым вниз передним краем; на фиг. 10, 11, 12 и 13 - модуль пружинящего основания согласно второму варианту, соответственно вид спереди, вид сверху, вид сзади и вид сбоку; на фиг. 14 - вид по Б-Б фиг. 12, при этом для наглядности изображены два рядом расположенных модуля пружинящего основания по второму варианту, а штриховой линией показано положение держателя и лопатки во время проведения процедур.
Устройство для вытяжения и удлинения позвоночника (как по первому, так и по второму вариантам) содержит (фиг. 1 и 2) горизонтально расположенную прямоугольную раму, (например, из трубчатого металлического профиля), выполненную в виде двух одинаковых и параллельных между собой продольных элементов 1 и 2 удлиненной формы, одноименные концы которых соединены (предпочтительно посредством сварки) между собой соответственно первой 3 и второй 4 концевыми поперечинами, а также расположенные последовательно вдоль продольной оси симметрии 5 рамы панель 6 для головы с шейным выступом 61, пружинящее основание 7 и панель 8 для голеней ног.
Панель 6 для головы закреплена на соответствующем ей основании 62 посредством (образующих совместно с ними параллелограммный механизм) двух пар опорных стержней, соответственно 63 и 64, при этом верхние концы первой пары опорных стержней 63 посредством расположенной соосно одной пары шарниров соединены с панелью 6 для головы, а нижние концы этой же пары опорных стержней 63 посредством расположенной также соосно другой пары шарниров соединены с основанием 62. Аналогично верхние и нижние концы второй пары опорных стержней 64 посредством соответствующих им шарниров, расположенных также попарно соосно, соединены соответственно с панелью 6 для головы и с основанием 62. Для обеспечения под действием внешней нагрузки упругого смещения панели 6 для головы в сторону от пружинящего основания 7, опорные стержни 63 посредством упругой стяжки 65 подпружинены относительно основания 62. Кроме того, в предпочтительном воплощении изобретения на опорных стержнях 63 выполнены выступы (на чертежах не показаны), обеспечивающие фиксацию панели 6 для головы в ее исходном положении (перед проведением процедуры), а на опорных стержнях 64 выполнены выступы (на чертежах не показаны), ограничивающие перемещение панели 6 для головы в процессе проведения процедур. Основание 62 посредством ползунов 66 установлено на продольных элементах 1 и 2 рамы с обеспечением возможности продольного перемещения и фиксации в требуемом положении, например с помощью размещенных на ползунах 66 стопорных винтов (на чертежах не показаны).
Пружинящее основание 7 (фиг. 1 и 2) включает два расположенных напротив друг друга одинаковых продольных несущих элемента, выполненных в виде жестких боковин 9 и 10 (например, из трубчатого металлического профиля), которые расположены над соответствующим каждой из них продольным элементом 1 и 2 рамы и закреплены на нем, например, посредством опорных стоек 11, а так же закрепленные на боковинах 9 и 10 с возможностью съема одинаковые модули 12, количество которых равно числу жестких опорных элементов в пружинящем основания 7, при этом конструктивно модули 12 по первому варианту отличаются от модулей 12 по второму варианту. Модули 12 в обоих вариантах воплощения изобретения расположены перпендикулярно боковинам 9 и 10, последовательно вдоль продольной оси 5 симметрии рамы и по обе стороны относительно поясничного упора 13, выполненного в виде, например, жесткого валика. Поясничный упор 13 расположен перпендикулярно боковинам 9 и 10 и закреплен на них. В предпочтительном воплощении изобретения для обеспечения высокой жесткости пружинящего основания 7 одноименные концы боковин 9 и 10 соединены (предпочтительно посредством сварки) между собой соответственно первым 14 и вторым 15 концевыми элементами удлиненной формы.
Согласно первому варианту патентуемого изобретения каждый модуль 12 (фиг. 3÷9) содержит корпус, включающий горизонтально расположенную верхнюю стенку 16, вертикально расположенную переднюю стенку 17, нижнюю стенку 18, имеющую форму полого кругового цилиндра с горизонтально расположенной осью 181 и радиусом - R внутренней цилиндрической поверхности, усеченного сбоку (иными словами, по образующим) двумя секущими плоскостями 182 и 183, расположенными по радиусу и под углом а относительно друг друга (фиг. 8), и две оппозитно расположенные одинаковые вертикальные боковые стенки 19 и 20, при этом верхний край и нижний край передней стенки 17 сопряжены соответственно с передним краем верхней 16 стенки и передним краем нижней 18 стенки, а каждая боковая стенка 19 и 20 соединена (например, посредством сварки) с верхней 16, передней 17 и нижней 18 стенками корпуса. В предпочтительном воплощении изобретения верхняя 16, передняя 17 и нижняя 18 стенки корпуса выполнены за одно целое. Каждая боковая стенка 19 (20) выполнена (фиг. 4, 5 и 7) с верхним выступом 191 (201) (предпочтительно, скругленным по радиусу), смещенным в сторону тыльного края соответствующей боковой стенки 19 (20), предпочтительно, или вблизи, или заподлицо с ее тыльным краем. В каждой боковой стенке 19 и 20 корпуса выполнено сквозное отверстие, при этом упомянутые сквозные отверстия расположены соосно оси 181 внешней и внутренней цилиндрических поверхностей нижней стенки 18 корпуса и, по крайней мере, частично в пределах соответствующего каждому из них выступа 191 (201), а в каждом сквозном отверстии размещен соответствующий конец боковой оси 21. Фиксация боковой оси 21 относительно боковых стенок 19 и 20 может быть осуществлена как с помощью известных из уровня техники ограничительных средств, а именно, с помощью шплинтов или штифтов (на чертежах они не показаны), так и с помощью резьбового соединения одного из концов боковой оси 21 с соответствующей ему боковой стенкой (например, с боковой стенкой 19, как показано на фиг. 12). Со стороны тыльного края верхней стенки 16 корпуса выполнены угловые прямоугольные вырезы 161 и 162 (фиг. 4), при этом тыльный торец верхней стенки 16 расположен напротив боковой оси 21 (на фиг 6 и 8 показаны два примера расположения тыльного торца верхней стенки 16 относительно боковой оси 21) с обеспечением минимально возможной величины зазора между обращенными друг к другу поверхностями, а тыльный край нижней стенки 18 корпуса не выступает за тыльный край боковых стенок 19 и 20 корпуса. Кроме того, каждый модуль 12 содержит два одинаковых держателя, каждый из которых выполнен в виде углового рычага, включающего соответственно верхний 22 (23) и нижний 24 (25) элементы, а также ограничительный упор 26 (27), при этом держатели размещены в соответствующем каждому из них прямоугольном вырезе 161 (162), выполненном в верхней стенке 16 корпуса, и установлены на боковой оси 21 с обеспечением возможности свободного поворота. Концевые участки верхних элементов 22 и 23 держателей соединены между собой посредством горизонтально расположенного жесткого опорного элемента 28, а на размещенных в полости корпуса нижних элементах 24 и 25 (в предпочтительном воплощении изобретения, выполненных в виде вилки) закреплена (например, посредством сварки) лопатка 29, выполненная в виде плоской пластины, при этом две стороны пластины, имеющие наибольшую площадь поверхности, расположены симметрично относительно плоскости 184 (фиг 6), в которой лежит ось 181 внешней и внутренней цилиндрических поверхностей нижней стенки 18 корпуса. Иными словами, лопатка 29 расположена радиально относительно нижней стенки 18. Лопатка 29 выполнена с размерами, обеспечивающими минимально возможный гарантированный зазор по всему ее периметру, а именно, сверху относительно боковой оси 21, по бокам относительно боковых стенок 19 и 20, а снизу относительно внутренней поверхности нижней стенки 18 корпуса. Иными словами, лопатка 29 практически полностью закрывает заднее отверстие в корпусе. В случае выполнения нижних элементов 24 и 25 держателей в виде вилки длина ее стержней (между которыми размещена лопатка 29) выбирается, исходя из обеспечения необходимой механической прочности (фиг. 8 и 9). Ограничительный упор 26 (27) каждого держателя выполнен с обеспечением возможности взаимодействия его с внешней поверхностью верхней стенки 16 корпуса (а именно, в начальном положении держателей ограничительные упоры 26 (27) опираются сверху на упомянутую стенку) и расположен под углом (3 относительно верхнего элемента 22 (23) соответствующего ему держателя (фиг. 7), при этом угол β является дополнительным до 180° к заданному начальному углу γ наклона верхних элементов 22 и 23 держателей относительно плоскости рамы. Верхний 22 (23) и нижний 24 (25) элементы каждого держателя расположены под углом относительно друг друга, обеспечивающим, при расположении верхних элементов 22 и 23 держателей относительно плоскости рамы под углом, равным начальному углу γ наклона, расположение нижнего торца лопатки 29 напротив нижней стенки 18 корпуса, предпочтительно, напротив участка ее внутренней поверхности, расположенного относительно тыльного края нижней стенки 18 на расстоянии, которое не меньше удвоенной толщины лопатки 29. Что касается упомянутого угла α между расположенными по радиусу двумя секущими плоскостями 182 и 183, то он больше диапазона изменения во время проведения процедур угла наклона верхних элементов 22 и 23 держателей, но не более, чем но 20%, поскольку в противном случае необоснованно увеличиваются габариты корпусов модулей 12 в направлении оси 5 симметрии рамы. В предпочтительном воплощении изобретения модули 12 расположены вплотную друг другу, при этом (для исключения влияния рядом расположенных модулей 12 на величину диапазона изменения во время процедур угла наклона верхних элементов 22 и 23 держателей) верхняя стенка 16 корпуса выполнена с загнутым вниз передним краем 163 (фиг. 9).
В полости корпуса с обеспечением в исходном положении контакта с внутренними поверхностями стенок 16, 17 и 18 корпуса и лопаткой 29 размещена эластичная замкнутая камера 30 удлиненной формы, заполненная находящимся под давлением газом (например, воздухом, или азотом), обеспечивающая в начальном положении держателей прижим их ограничительных упоров 26 и 27 к внешней поверхности верхней стенки 16 корпуса. Благодаря выполнению лопатки 29 с размерами, обеспечивающими минимально возможный гарантированный зазор по всему ее периметру, а также размещению тыльного торца верхней стенки 16 напротив боковой оси 21 с обеспечением минимально возможной величины зазора между обращенными друг к другу поверхностями, обеспечивается во время проведения процедур гарантированное размещение всей эластичной замкнутой камеры 30 в полости, ограниченной, с одной стороны, стенками 16. 17, 18, 19 и 20 корпуса, а, с другой стороны, боковой осью 21 и лопаткой 29.
Каждый модуль 12 выполнен с двумя горизонтально расположенными боковыми полками, которые расположены на соответствующей каждой из них боковине 9 и 10 пружинящего основания 7, при этом в полках выполнены отверстия (на чертежах показаны в виде двух линий, пересекающихся под прямым углом) под крепежные элементы, предпочтительно резьбовые, посредством которых полки разъемно соединены с упомянутыми боковинами, а модули 12 закреплены на боковинах 9 и 10 с обеспечением наклона соответствующего каждому из них жесткого опорного элемента 28 в сторону от поясничного упора 13. В простейшем примере воплощения патентуемого изобретения, предназначенные для крепления модулей 12 к боковинам 9 и 10 пружинящего основания 7, упомянутые боковые полки могут быть выполнены в виде двух одинаковых пластин, приваренных к соответствующей каждой из них боковой стенки 19 и 20 корпуса. Более высокие эксплуатационные параметры достигаются при использовании пластины 31 удлиненной формы, расположенной параллельно боковой оси 21 и закрепленной на верхней стенке 16 корпуса с образованием участков 311 и 312, имеющих отверстия (на чертежах они показаны в виде двух линий, пересекающихся под прямым углом) под резьбовые крепежные элементы, и выступающих за пределы соответственно стенок 19 и 20 (фиг. 4, 5 и 6), а, следовательно, выполняющих функцию боковых горизонтально расположенных полок, при этом тыльный торец пластины 31 расположен с зазором относительно ограничительных упоров 26 (27). Далее при описании второго варианта будет представлен еще один пример выполнения упомянутых боковых полок, а именно, за одно целое с верхней стенкой 16 корпуса. Далее приводится подробное описание со ссылками на чертежи второго варианта воплощения патентуемого изобретения, при этом одни и те же элементы в обоих вариантах обозначены одной и той же цифрой.
Согласно второму варианту каждый модуль 12 (фиг. 10÷14) содержит корпус, включающий горизонтально расположенную верхнюю стенку 16 с загнутым вниз передним краем 163 (как и в описанном выше примере выполнения корпуса по первому варианту, представленном на фиг. 9), вертикально расположенную переднюю стенку 17, нижнюю стенку 18, имеющую форму полого кругового цилиндра с горизонтально расположенной осью 181, усеченного сбоку (иными словами, по образующим) двумя секущими плоскостями 182 и 183, расположенными по радиусу и под углом а относительно друг друга (фиг. 14), и две оппозитно расположенные одинаковые вертикальные боковые стенки 19 и 20, которые соединены (например, посредством сварки) с верхней 16, передней 17 и нижней 18 стенками корпуса. В предпочтительном воплощении изобретения верхняя 16, передняя 17 и нижняя 18 стенки корпуса выполнены за одно целое. В каждой боковой стенке 19 и 20 корпуса выполнено сквозное отверстие, при этом упомянутые сквозные отверстия расположены соосно оси 181 внешней и внутренней цилиндрических поверхностей нижней стенки 18 корпуса, а в каждом сквозном отверстии размещен соответствующий конец боковой оси 21. Аналогично тому, как и в описанном выше первом варианте, фиксация боковой оси 21 относительно боковых стенок 19 и 20 может быть осуществлена как с помощью известных из уровня техники ограничительных средств, а именно, с помощью шплинтов или штифтов (на чертежах они не показаны), так и с помощью резьбового соединения одного из концов боковой оси 21 с соответствующей ему боковой стенкой (например, с боковой стенкой 19, как показано на фиг. 12).
Со стороны тыльного края верхней стенки 16 корпуса выполнены прямоугольные вырезы 164 и 165 (фиг. 11 и 12), при этом (в отличие от описанного выше первого варианта) верхняя стенка 16 корпуса расположена над боковой осью 21 (фиг. 14) с обеспечением минимально возможного расстояния между ее внутренней поверхностью и боковой осью 21, а тыльный край нижней стенки 18 корпуса не выступает за тыльный край боковых стенок 19 и 20 корпуса.
Кроме того, каждый модуль 12 содержит два одинаковых держателя, каждый из которых выполнен в виде углового рычага, включающего соответственно верхний 22 (23) и нижний 24 (25) элементы, а также ограничительный упор 261 (271), при этом держатели размещены в соответствующем каждому из них и упомянутом прямоугольном вырезе 164 (165), выполненном в верхней стенке 16 корпуса, и установлены на боковой оси 21 с обеспечением возможности свободного поворота. Концевые участки верхних элементов 22 и 23 держателей соединены между собой посредством горизонтально расположенного жесткого опорного элемента 28, а на размещенных в полости корпуса нижних элементах 24 и 25 (в предпочтительном воплощении изобретения, выполненных в виде вилки) закреплена (например, посредством сварки) лопатка 29, выполненная в виде плоской пластины, при этом две стороны пластины, имеющие наибольшую площадь поверхности, расположены симметрично относительно плоскости 184 (фиг. 14), в которой лежит ось 181 внешней и внутренней цилиндрических поверхностей нижней стенки 18 корпуса. Иными словами, лопатка 29, как и в описанном выше первом варианте воплощения изобретения, расположена радиально относительно нижней стенки 18. Лопатка 29 выполнена с размерами, обеспечивающими минимально возможный гарантированный зазор по всему ее периметру, а именно, сверху относительно боковой оси 21, по бокам относительно боковых стенок 19 и 20, а снизу относительно внутренней поверхности нижней стенки 18 корпуса. Ограничительный упор 261 (271) каждого держателя выполнен с обеспечением возможности взаимодействия его с поверхностью поперечной стенки (иными словами, со стенкой соответствующего прямоугольного выреза, параллельной тыльному краю верхней стенки 16) соответствующего прямоугольного выреза 164 (165) (а именно, в начальном положении держателей их ограничительные упоры 261 (271) упираются в упомянутую стенку) и расположен под углом β относительно верхнего элемента 22 (23) соответствующего ему держателя (фиг. 13), при этом угол β является дополнительным до 180° к заданному начальному углу γ наклона верхних элементов 22 и 23 держателей относительно плоскости рамы. Верхний 22 (23) и нижний 24 (25) элементы каждого держателя расположены под углом относительно друг друга, обеспечивающим, при расположении верхних элементов 22 и 23 держателей относительно плоскости рамы под углом, равным начальному углу γ наклона, расположение нижнего торца лопатки 29 напротив нижней стенки 18 корпуса, предпочтительно, напротив участка ее внутренней поверхности, расположенного относительно тыльного края нижней стенки 18 на расстоянии, которое не меньше удвоенной толщины лопатки 29 (фиг. 14). Что касается упомянутого угла α между расположенными по радиусу двумя секущими плоскостями 182 и 183, то он больше диапазона изменения во время проведения процедур угла наклона верхних элементов 22 и 23 держателей, но не более, чем но 20%, поскольку в противном случае необоснованно увеличиваются габариты корпусов модулей 12 в направлении оси 5 симметрии рамы. Загнутый вниз передний край 163 верхней стенки 16 корпуса выполнен с геометрических параметров (в частности, величиной угла наклона), которые (даже при расположении модулей 12 вплотную друг к другу) обеспечивают необходимый (задаваемый при проектировании) диапазон изменения во время процедур угла наклона верхних элементов 22 и 23 держателей (на фиг. 14 положение держателя при максимальном угле его наклона показано штриховыми линиями).
В предпочтительном воплощении второго варианта патентуемого изобретения каждая боковая стенка 19 и 20 (фиг. 11) выполнена соответственно с верхним выступом 191 и 201 (предпочтительно, скругленным по радиусу), расположенным над соответствующим сквозным отверстием, выполненным в боковой стенке 19 (20). Однако, в отличие от описанного выше первого варианта, выступы 191 и 201 в данном случае предназначены для повышения механической прочности в местах размещения концов боковой оси 21 и размещены в соответствующем каждому из них прямоугольном вырезе 164 и 165.
Аналогично тому, как и в описанном выше первом варианте, в полости корпуса с обеспечением в исходном положении контакта с внутренними поверхностями стенок 16, 17 и 18 корпуса и лопаткой 29 размещена эластичная замкнутая камера 30 удлиненной формы, заполненная находящимся под давлением газом (например, воздухом, или азотом), обеспечивающая в начальном положении держателей прижим их ограничительных упоров 261 и 271 к поверхности поперечной стенки соответствующего каждому из них прямоугольного выреза 164 и 165. Благодаря выполнению лопатки 29 с размерами, обеспечивающими минимально возможный гарантированный зазор по всему ее периметру, а также размещению верхней стенки 16 над боковой оси 21 и с обеспечением минимально возможного расстояния между ее внутренней поверхностью и боковой осью 21, обеспечивается во время проведения процедур гарантированное размещение всей эластичной замкнутой камеры 30 в полости, ограниченной, с одной стороны, стенками 16. 17, 18, 19 и 20 корпуса, а, с другой стороны, боковой осью 21 и лопаткой 29.
Каждый модуль 12 выполнен с двумя горизонтально расположенными боковыми полками, которые расположены на соответствующей каждой из них боковине 9 и 10 пружинящего основания 7, при этом в полках выполнены отверстия (на чертежах показаны в виде двух линий, пересекающихся под прямым углом) под крепежные элементы, предпочтительно резьбовые, посредством которых полки разъемно соединены с упомянутыми боковинами, а модули 12 закреплены на боковинах 9 и 10 с обеспечением наклона соответствующего каждому из них жесткого опорного элемента 28 в сторону от поясничного упора 13.
В предпочтительном воплощении второго варианта патентуемого изобретения упомянутые полки выполнены (фиг. 10÷12) в виде двух оппозитно расположенных участков 166 и 167, являющимися продолжением горизонтально расположенного участка верхней стенки 16 корпуса и удлиняющими его в направлении, параллельном боковой оси 21.
Аналогично тому, как и в описанном выше первом варианте, пружинящее основание 7 патентуемого устройства для вытяжения и удлинения позвоночника может быть выполнено с заранее заданным распределением жесткости в продольном направлении рамы за счет варьирования величины давления газа в эластичных замкнутых камерах 30. Иными словами, патентуемое изобретение обеспечивает достижение более высоких эксплуатационных параметров по сравнению с прототипом. Здесь необходимо отметить, что использование вкладышей из упруго деформируемого материала вместо эластичных замкнутых камер 30 удлиненной формы, заполненных находящимся под давлением газом, не обеспечит в той же степени достижение упомянутого технического результата вследствие ограниченности
Панель 8 для голеней ног (как по первому, так и по второму вариантам) закреплена на соответствующем ей основании 81 (фиг. 1 и 2) посредством (образующих совместно с ними параллелограммный механизм) двух пар опорных стержней, соответственно 82 и 83, при этом верхние концы первой пары опорных стержней 82 посредством расположенной соосно одной пары шарниров соединены с панелью 8 для голеней ног, а нижние концы этой же пары опорных стержней 82 посредством расположенной также соосно другой пары шарниров соединены с основанием 81. Аналогично верхние и нижние концы второй пары опорных стержней 83 посредством соответствующих им шарниров, расположенных также попарно соосно, соединены соответственно с панелью 8 для голеней ног и с основанием 81. Для обеспечения под действием внешней нагрузки упругого смещения панели 8 для голеней ног в сторону от пружинящего основания 7, опорные стержни 82 посредством упругой стяжки 84 подпружинены относительно основания 81. Кроме того, в предпочтительном воплощении изобретения на опорных стержнях 82 выполнены выступы (на чертежах не показаны), обеспечивающие фиксацию панели 8 для голеней ног в ее исходном положении (перед проведением процедуры), а на опорных стержнях 83 выполнены выступы (на чертежах не показаны), ограничивающие перемещение панели 8 для голеней ног в процессе проведения процедур. Основание 81 посредством ползунов 85 установлено на продольных элементах 1 и 2 рамы с обеспечением возможности продольного перемещения и фиксации в требуемом положении, например с помощью размещенных на ползунах 85 стопорных винтов (на чертежах не показаны).
В обоих описанных выше вариантах осуществления устройство для вытяжения и удлинения позвоночника используется следующим образом. Перед проведением процедуры (аналогично тому, как и в прототипе) осуществляют регулировку устройства под индивидуальные антропометрические данные конкретного пользователя, поскольку для эффективного вытяжения позвоночника необходимо обеспечить соприкосновение всех опорных поверхностей устройства для вытяжения и удлинения позвоночника с обнаженными участками тела лежащего на спине пользователя, а именно: место максимального прогиба позвоночника пользователя в поясничном отделе (поясничный лордоз) должно находиться над поясничным упором 13, который закреплен на боковинах 9 10 пружинящего основания 7, расположение шейного выступа 61 должно соответствовать максимальной точке шейного изгиба позвоночника, а положение головы на соответствующей ей панели 6, при этом положение ног на соответствующей им панели 8 для голеней ног должно быть максимально удобным для пользователя. В процессе регулировки за счет продольного перемещения как основания 62, на котором с обеспечением возможности под действием внешней нагрузки упругого смещения в направлении от пружинящего основания 7 закреплена панель 6 для головы, так и основания 81, на котором с обеспечением возможности под действием внешней нагрузки упругого смещения в направлении от пружинящего основания 7 закреплена панель 8 для голеней ног, добиваются максимально комфортного положения пользователя на опорных поверхностях устройства, которое, как и в прототипе, может быть выполнено с ножками.
При выполнении вышеперечисленных условий после укладывания пользователя на опорные части устройства вес той части тела пользователя, которая расположена на пружинящем основании 7, оказывается распределенным по всем его жестким опорным элементам 28 при этом усилие, действующее на каждый жесткий опорный элемент 28, приводит к возникновению соответствующего крутящего момента, действующего относительно горизонтально расположенной боковой оси 21 поворота соответствующих каждому жесткому опорному элементу 28 держателей, соединенных с лопаткой 29, и направленного или против часовой стрелки для жестких опорных элементов 28, расположенных по ту же сторону относительно поясничного упора 13, что и панель 6 для головы, или по часовой стрелке для жестких опорных элементов 28, расположенных по ту же сторону относительно поясничного упора 13, что и панель 8 для голеней ног. Под действием крутящего момента имеет место как поворот соответствующих каждому жесткому опорному элементу 28 держателей и соединенной с их нижними элементами 24 и 25 лопатки 29 относительно соответствующей им боковой оси 21, так и перемещение соединенного с ними жесткого опорного элемента 28 в направлении от поясничного упора 13 к соответствующей панели. Поворот каждой лопатки 29 приводит к приложению усилия к соответствующей (иными словами, расположенной в том же корпусе) эластичной замкнутой камере 30 удлиненной формы, заполненной находящимся под давлением газом. Приложение усилия к эластичной замкнутой камере 30 приводит к ее упругой деформации, а, следовательно, к возникновению упругой силы, препятствующей дальнейшему повороту лопатки 28. Обусловленное поворотом держателей продольное смещение связанного с ними жесткого опорного элемента 28 в направлении от поясничного упора 13 обеспечивает (за счет силы трения между верхней поверхностью жесткого опорного элемента 28 и кожей пользователя) приложение к телу пользователя вытягивающего усилия, которое через кожу и мышцы передается с поверхности тела позвоночнику, обеспечивая тем самым его продольное вытяжение. Таким образом, величина угла поворота держателей определяется, с одной стороны, величиной упомянутого крутящего момента, а, с другой стороны, жесткостью заполненной газом эластичной замкнутой камеры 30 удлиненной формы и сопротивлением тела пользователя растяжению. Размещение как панели 6 для головы, так и панели 8 для голеней ног на соответствующем каждой из них основании 62 и 81 с обеспечением возможности под действием внешней нагрузки упругого смещения их в направлении от пружинящего основания 7 обеспечивает (аналогично тому, как и в прототипе) увеличение растягивающей силы, действующей на позвоночник. По окончанию процедуры пользователь встает с устройства, при этом за счет силы, обусловленной упругой деформацией эластичных замкнутых камер 30 удлиненной формы и действующей на лопатки 29, последние, вместе с соответствующими каждой из них держателями с жестким опорным элементом 28, поворачиваясь относительно соответствующей каждой из них боковой оси 21, возвращаются в исходное положение.
В случае нарушения целостности какой-либо из эластичных замкнутых камер 30 с помощью отвертки или гаечного ключа осуществляют демонтаж неисправного модуля 12 путем отвинчивания резьбовых крепежных элементов (винтов или болтов), размещенных в отверстиях, выполненных в опорных полках 311 и 312 согласно первому варианту или в опорных полках 166 и 167 согласно второму варианту. Затем или извлекают ограничительные средства, обеспечивающие фиксацию боковой оси 21 относительно боковых стенок 19 и 20 (шплинты или штифты), а затем извлекают боковую ось 21, или (фиг. 12) с помощью отвертки вывинчивают боковую ось 21. В результате модуль 12 оказывается разобранным на следующие компоненты, а именно: на корпус, на узел, включающий два держателя с закрепленными на них жестким опорным элементом 28 и лопаткой 29, а также на боковую ось 21 и на неисправную эластичную замкнутую камеру 30. После замены эластичной замкнутой камеры 30 на новую осуществляют сборку модуля 12. Для этого сначала размещают эластичную замкнутую камеру 30 в полости корпуса модуля 12, а после установки упомянутого узла относительно корпуса с обеспечением совмещения отверстия в каждом держателе с отверстием в соответствующей каждому из них боковой стенке корпуса 19 и 20 размещают концы боковой оси 21 в упомянутых отверстиях. Затем боковую ось 21 фиксирую относительно боковых стенок 19 и 20. После сборки модуль 12 закрепляю на боковинах 9 и 10. Из вышесказанного следует, что ремонт модулей не только не сопряжен со значительными затратами труда и времени, но и может в целом ряде случаев осуществлен самим пользователем. Иными словами, патентуемое изобретение обеспечивает достижение таких технических результатов, которые в совокупности обеспечивают достижение более высокой ремонтопригодности устройства для вытяжения и удлинения позвоночника при одновременном повышении удобства по его техническому обслуживанию.
Промышленная применимость изобретения подтверждается так же тем, что оно может быть осуществлено с помощью известных из уровня техники средств и материалов.
Группа изобретений включает два варианта устройства для вытяжения и удлинения позвоночника, относится к медицинской технике и предназначена для лечения позвоночника. Устройство содержит прямоугольную раму, вдоль продольной оси симметрии которой последовательно размещены панель для головы, пружинящее основание и панель для голеней ног. Пружинящее основание включает две жесткие боковины, расположенные над соответствующим каждой из них продольным элементом рамы и закреплены на нем, а также закрепленные с возможностью съема на боковинах одинаковые модули, количество которых равно числу жестких опорных элементов в пружинящем основания. Модули расположены перпендикулярно боковинам пружинящего основания, последовательно вдоль продольной оси симметрии рамы и по обе стороны относительно поясничного упора, расположенного перпендикулярно боковинам и закрепленного на них. Каждый модуль содержит корпус, включающий верхнюю стенку, переднюю стенку, нижнюю стенку, имеющую форму полого кругового цилиндра с горизонтально расположенной осью, усеченного сбоку двумя секущими плоскостями, расположенными по радиусу и под углом относительно друг друга, который больше диапазона изменения во время проведения процедур угла наклона верхних элементов упомянутых ниже держателей, а также две оппозитно расположенные одинаковые вертикальные боковые стенки. Каждый модуль содержит два одинаковых держателя, каждый из которых выполнен в виде углового рычага, включающего верхний и нижний элементы, а также ограничительный упор. Держатели размещены в соответствующем каждому из них прямоугольном вырезе, выполненном со стороны тыльного края верхней стенки корпуса, и установлены с возможностью свободного поворота на боковой оси, каждый конец которой размещен в сквозном отверстии, выполненном в соответствующей боковой стенке корпуса, при этом сквозные отверстия расположены соосно оси внешней и внутренней цилиндрических поверхностей нижней стенки корпуса. Концевые участки верхних элементов держателей соединены между собой посредством горизонтально расположенного жесткого опорного элемента, а на размещенных в полости корпуса нижних элементах держателей закреплена лопатка в виде плоской пластины, расположенной радиально относительно плоскости, в которой лежит ось внешней и внутренней цилиндрических поверхностей нижней стенки корпуса. В полости корпуса с обеспечением в исходном положении контакта с внутренними поверхностями верхней, передней, нижней стенок корпуса и лопаткой размещена эластичная замкнутая камера удлиненной формы, заполненная находящимся под давлением газом. Каждый модуль выполнен с двумя горизонтально расположенными боковыми полками, расположенными на соответствующей каждой из них боковине пружинящего основания и разъемно соединены с ними. Модули закреплены на боковинах с обеспечением наклона соответствующего каждому из них жесткого опорного элемента в сторону от поясничного упора. Изобретения позволяют повысить ремонтопригодность устройства. 2 н. и 4 з.п. ф-лы, 14 ил.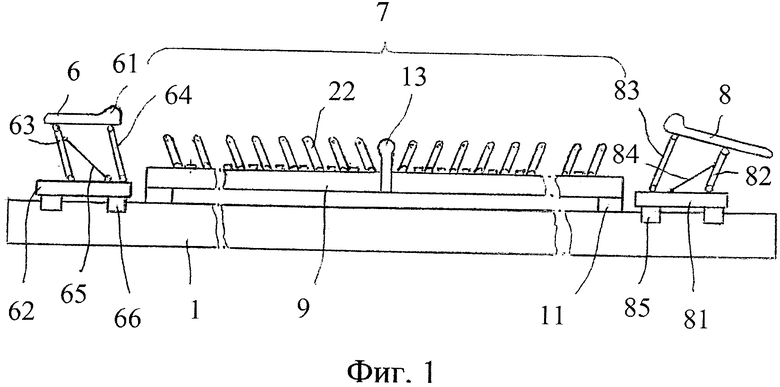
1. Устройство для вытяжения и удлинения позвоночника, содержащее горизонтально расположенную прямоугольную раму в виде двух продольных элементов, одноименные концы которых соединены между собой соответствующей концевой поперечиной, а также расположенные последовательно вдоль продольной оси симметрии рамы панель для головы с шейным выступом, пружинящее основание и панель для голеней ног, при этом пружинящее основание включает два одинаковых продольных несущих элемента, которые расположены напротив друг друга и закреплены на раме, а также параллельные между собой жесткие опорные элементы, расположенные с зазором относительно друг друга последовательно вдоль продольных элементов рамы и по обе стороны относительно поясничного упора, при этом каждая упомянутая панель закреплена на соответствующем ей основании, а каждое основание установлено на продольных элементах рамы с обеспечением возможности перемещения вдоль ее продольной оси симметрии и фиксации в заданном положении, отличающееся тем, что продольные несущие элементы пружинящего основания выполнены в виде жестких боковин, которые расположены над соответствующим каждой из них продольным элементом рамы и закреплены на нем, при этом пружинящее основание включает также закрепленные с возможностью съема на ее боковинах одинаковые модули, количество которых равно числу упомянутых жестких опорных элементов в пружинящем основания, при этом модули расположены перпендикулярно боковинам пружинящего основания, последовательно вдоль продольной оси симметрии рамы и по обе стороны относительно упомянутого поясничного упора, который расположен перпендикулярно боковинам и закреплен на них, каждый модуль содержит корпус, включающий горизонтально расположенную верхнюю стенку, вертикально расположенную переднюю стенку, нижнюю стенку, имеющую форму полого кругового цилиндра с горизонтально расположенной осью, усеченного сбоку двумя секущими плоскостями, расположенными по радиусу и под углом α относительно друг друга, а также две оппозитно расположенные одинаковые вертикальные боковые стенки, выполненные с верхним выступом, смещенным в сторону тыльного края соответствующей боковой стенки, при этом в каждой боковой стенке корпуса выполнено сквозное отверстие, расположенное соосно оси внешней и внутренней цилиндрических поверхностей нижней стенки корпуса и, по крайней мере, частично в пределах соответствующего каждому из них выступа, а в каждом упомянутом сквозном отверстии размещен соответствующий ему конец боковой оси, напротив которой с обеспечением минимально возможной величины зазора между обращенными друг к другу поверхностями расположен тыльный торец верхней стенки, каждый модуль содержит также два одинаковых держателя, каждый из которых выполнен в виде углового рычага, включающего верхний и нижний элементы, а также ограничительный упор, при этом держатели размещены в соответствующем каждому из них угловом прямоугольном вырезе, выполненном со стороны тыльного края верхней стенки корпуса, и установлены на боковой оси с обеспечением возможности свободного поворота, при этом концевые участки верхних элементов держателей соединены между собой посредством горизонтально расположенного жесткого опорного элемента, а на размещенных в полости корпуса нижних элементах держателей закреплена лопатка, выполненная в виде плоской пластины, при этом две стороны пластины, имеющие наибольшую площадь поверхности, расположены симметрично относительно плоскости, в которой лежит ось внешней и внутренней цилиндрических поверхностей нижней стенки корпуса, причем лопатка выполнена с размерами, обеспечивающими минимально возможный гарантированный зазор по всему ее периметру, а ограничительный упор каждого держателя выполнен с обеспечением возможности взаимодействия его с внешней поверхностью верхней стенки корпуса и расположен под углом β относительно верхнего элемента соответствующего ему держателя, являющимся углом, дополнительным до 180° к заданному начальному углу γ наклона верхних элементов держателей относительно плоскости рамы, верхний и нижний элементы каждого держателя расположены под углом относительно друг друга, обеспечивающим, при расположении верхних элементов держателей относительно плоскости рамы под упомянутым углом γ, расположение нижнего торца лопатки напротив нижней стенки корпуса, а упомянутый угол α между расположенными по радиусу двумя секущими плоскостями больше диапазона изменения во время проведения процедур угла наклона верхних элементов держателей, в полости корпуса с обеспечением в исходном положении контакта с внутренними поверхностями верхней, передней, нижней стенок корпуса и лопаткой размещена эластичная замкнутая камера удлиненной формы, заполненная находящимся под давлением газом и обеспечивающая в начальном положении держателей прижим их ограничительных упоров к внешней поверхности верхней стенки корпуса, при этом каждый модуль выполнен с двумя горизонтально расположенными боковыми полками, которые расположены на соответствующей каждой из них боковине пружинящего основания и разъемно соединены с ними, а модули закреплены на боковинах пружинящего основания с обеспечением наклона соответствующего каждому из них жесткого опорного элемента в сторону от поясничного упора.
2. Устройство по п. 1, отличающееся тем, что верхняя, передняя и нижняя стенки корпуса выполнены за одно целое.
3. Устройство по п. 1, отличающееся тем, что верхняя стенка корпуса выполнена с загнутым вниз передним краем.
4. Устройство для вытяжения и удлинения позвоночника, содержащее горизонтально расположенную прямоугольную раму в виде двух параллельных между собой продольных элементов, одноименные концы которых соединены между собой соответствующей концевой поперечиной, а также расположенные последовательно вдоль продольной оси симметрии рамы панель для головы с шейным выступом, пружинящее основание и панель для голеней ног, при этом пружинящее основание включает два одинаковых продольных несущих элемента, которые расположены напротив друг друга и закреплены на раме, а также параллельные между собой жесткие опорные элементы, расположенные с зазором относительно друг друга последовательно вдоль продольных элементов рамы и по обе стороны относительно поясничного упора, при этом каждая упомянутая панель закреплена на соответствующем ей основании, а каждое основание установлено на продольных элементах рамы с обеспечением возможности перемещения вдоль ее продольной оси симметрии и фиксации в заданном положении, отличающееся тем, что продольные несущие элементы пружинящего основания выполнены в виде жестких боковин, которые расположены над соответствующим каждой из них продольным элементом рамы и закреплены на нем, при этом пружинящее основание включает также закрепленные с возможностью съема на ее боковинах одинаковые модули, количество которых равно числу упомянутых жестких опорных элементов в пружинящем основания, при этом модули расположены перпендикулярно боковинам пружинящего основания, последовательно вдоль продольной оси симметрии рамы и по обе стороны относительно упомянутого поясничного упора, который расположен перпендикулярно боковинам и закреплен на них, а каждый модуль содержит корпус, включающий горизонтально расположенную верхнюю стенку с загнутым вниз передним краем, вертикально расположенную переднюю стенку, нижнюю стенку, имеющую форму полого кругового цилиндра с горизонтально расположенной осью, усеченного сбоку двумя секущими плоскостями, расположенными по радиусу и под углом α относительно друг друга, и две оппозитно расположенные одинаковые вертикальные боковые стенки, в каждой из которых выполнено сквозное отверстие, при этом упомянутые сквозные отверстия расположены соосно оси внешней и внутренней цилиндрических поверхностей нижней стенки корпуса, а в каждом упомянутом сквозном отверстии размещен соответствующий конец боковой оси, верхняя стенка корпуса расположена над боковой осью с обеспечением минимально возможного расстояния между ее внутренней поверхностью и боковой осью, а каждый модуль содержит также два одинаковых держателя, каждый из которых выполнен в виде углового рычага, включающего верхний и нижний элементы, а также ограничительный упор, при этом держатели размещены в соответствующем каждому из них прямоугольном вырезе, выполненном со стороны тыльного края верхней стенки корпуса, и установлены на боковой оси с обеспечением возможности свободного поворота, причем концевые участки верхних элементов держателей соединены между собой посредством горизонтально расположенного жесткого опорного элемента, а на размещенных в полости корпуса нижних элементах держателей закреплена лопатка, выполненная в виде плоской пластины, при этом лопатка выполнена с размерами, обеспечивающими минимально возможный гарантированный зазор по всему ее периметру, а две стороны пластины, имеющие наибольшую площадь поверхности, расположены симметрично относительно плоскости, в которой лежит ось внешней и внутренней цилиндрических поверхностей нижней стенки корпуса, а ограничительный упор каждого держателя выполнен с обеспечением возможности взаимодействия его с поверхностью поперечной стенки соответствующего ему и упомянутого прямоугольного выреза, выполненного в верхней стенке корпуса, и расположен под углом β относительно верхнего элемента соответствующего ему держателя, и являющимся дополнительным до 180° к заданному начальному углу γ наклона верхних элементов держателей относительно плоскости рамы, верхний и нижний элементы каждого держателя расположены под углом относительно друг друга, обеспечивающим, при расположении верхних элементов держателей относительно плоскости рамы под углом, равным начальному углу γ наклона, расположение нижнего торца лопатки напротив нижней стенки корпуса, а упомянутый угол α между расположенными по радиусу двумя секущими плоскостями больше диапазона изменения во время проведения процедур угла наклона верхних элементов держателей, в полости корпуса с обеспечением в исходном положении контакта с внутренними поверхностями верхней, передней, нижней стенок корпуса и лопаткой размещена эластичная замкнутая камера удлиненной формы, заполненная находящимся под давлением газом, обеспечивающая в начальном положении держателей прижим их ограничительных упоров к поверхности поперечной стенки соответствующего каждому из них упомянутого прямоугольного выреза, каждый модуль выполнен с двумя горизонтально расположенными боковыми полками, которые расположены на соответствующей каждой из них боковине пружинящего основания и разъемно соединены с ними, а модули закреплены на боковинах с обеспечением наклона соответствующего каждому из них жесткого опорного элемента в сторону от поясничного упора.
5. Устройство по п. 4, отличающееся тем, что верхняя, передняя и нижняя стенки корпуса выполнены за одно целое, а боковые полки выполнены в виде двух оппозитно расположенных участков, являющихся продолжением горизонтально расположенного участка верхней стенки корпуса и удлиняющими его в направлении, параллельном боковой оси.
6. Устройство по п. 4, отличающееся тем, что каждая боковая стенка выполнена с верхним выступом, расположенным над соответствующим сквозным отверстием, выполненным в боковой стенке.
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ И ЛЕЧЕНИЯ ПОЗВОНОЧНИКА | 1998 |
|
RU2147426C1 |
| Очки | 1930 |
|
SU22956A1 |
| СПОСОБ ОЧИСТКИ ПОДСМОЛЬНЫХ ВОД ОТ ФЕНОЛОВ | 1935 |
|
SU46930A1 |
| US 3238936 A, 08.03.1966 | |||
| US 5181904 A, 26.01.1993. | |||

