Область техники, к которой относится изобретение
[1] Данное изобретение относится к устройству для очистки, которое автономно распознает рабочее намерение пользователя перемещать, и способу управления им.
Уровень техники
[2] В общем случае, устройство для очистки, такое, как пылесос и пароочиститель, представляет собой устройство, в котором всасывающий электродвигатель, установленный внутри основного корпуса, используется для всасывания воздуха, включающего в себя инородный материал, такой, как пыль, и в котором фильтр, находящийся внутри основного корпуса, используется для удаления инородного материала из воздуха и выпуска отфильтрованного воздуха.
[3] Устройство для очистки может относиться к устройствам контейнерного типа, в котором всасывающий патрубок для всасывания пыли выполнен отдельным от основного корпуса и соединенным с ним посредством соединителя и вертикальным, причем всасывающий патрубок соединяется с основным корпусом с возможностью поворота.
[4] В общем случае, устройство для очистки включает в себя основной корпус, имеющий всасывающий электродвигатель, всасывающий патрубок, конфигурация которого обеспечивает всасывание воздуха, включающего в себя инородный материал, с поверхности пола, и воздушный шланг, конфигурация которого обеспечивает перемещение воздуха, всасываемого во всасывающий патрубок, в основной корпус. В этом случае, когда пользователь перемещает всасывающий патрубок, основной корпус перемещается вместе со всасывающим патрубком.
[5] Вместе с тем, чтобы пользователь смог перемещать устройство для очистки, необходимо приложить силу, соответствующую силе трения на нижней поверхности основного корпуса, и поэтому перемещение устройства для очистки оказывается непростым. То есть, поскольку устройство для очистки не имеет системы электропитания для перемещения основного корпуса, пользователь должен непосредственно перемещать основной корпус или тянуть за воздушный шланг, чтобы переместить основной корпус. В частности, когда пользователь тянет за воздушный шланг, чтобы переместить основной корпус, может возникнуть неисправность, такая, как повреждение соединителя трубки.
[6] Обычное автономное подвижное устройство для очистки предусматривает применение метода использования ультразвуковых датчиков во всасывающем инородный материал патрубке и основном корпусе, как описано в приводимом ниже патентном документе 1. Однако в этом случае, когда между ультразвуковым передающим блоком и ультразвуковым принимающим блоком есть препятствие, прием ультразвукового сигнала невозможен. Кроме того, ультразвуковой передающий блок и ультразвуковой принимающий блок могут оказаться блокированными пользователем, и т.д. Помимо этого, когда устройство для очистки используют в пространстве загроможденного помещения, может произойти неправильное срабатывание из-за ультразвуковых сигналов, отражаемых окружающими предметами.
[7] Соответственно, необходима технология решения таких проблем.
Раскрытие сущности изобретения
Техническая задача
[8] Поэтому аспект подробного описания заключается в том, чтобы разработать автономное подвижное устройство для очистки, которое предусматривает управление основным корпусом устройства для очистки, позволяющее ему следовать за блоком всасывания без использования ультразвуковых волн в отличие от обычных технологий, и способ управления этим устройством.
Решение задачи
[9] Чтобы достичь этих и других преимуществ и в соответствии с назначением этого описания, воплощаемым и описываемым здесь в широком смысле, предложено автономное подвижное устройство для очистки, включающее в себя основной корпус, блок всасывания, который имеет ручку и конфигурация которого обеспечивает всасывание окружающего инородного материала, воздушный шланг, конфигурация которого обеспечивает соединение основного корпуса и блока всасывания и направление инородного материала в основной корпус, по меньшей мере одно движущее колесо, установленное под основным корпусом, блок привода, конфигурация которого обеспечивает осуществление привода движущего колеса посредством работы приводного электродвигателя, датчик колес, конфигурация которого обеспечивает восприятие вращения движущего колеса, и контроллер, конфигурация которого обеспечивает управление перемещением основного корпуса посредством блока привода на основе воспринимаемого датчиком колес вращения движущего колеса.
[10] Контроллер может управлять перемещением основного корпуса на основе воспринимаемого датчиком колес вращения движущего колеса, когда блок привода не осуществляет привод движущего колеса.
[11] Датчик колес может воспринимать вращение первого движущего колеса, расположенного на левой стороне основного корпуса, и вращение второго движущего колеса, расположенного на правой стороне основного корпуса, а контроллер может индивидуально управлять первым движущим колесом и вторым движущим колесом на основе воспринимаемого датчиком колес вращения первого движущего колеса и второго движущего колеса.
[12] Контроллер может обеспечивать осуществление привода первого движущего колеса и второго движущего колеса в том же направлении, что и воспринимаемые датчиком колес направления вращения первого движущего колеса и второго движущего колеса.
[13] Контроллер может обеспечивать осуществление привода первого движущего колеса и второго движущего колеса в соответствии с количественными параметрами вращения первого движущего колеса и второго движущего колеса, воспринимаемыми датчиком колес.
[14] Количественные параметры вращения, по которым осуществляется привод первого движущего колеса и второго движущего колеса, могут быть больше, чем количественные параметры вращения первого движущего колеса и второго движущего колеса, воспринимаемые датчиком колес.
[15] Контроллер может обеспечивать осуществление привода первого движущего колеса и второго движущего колеса таким образом, что количественные параметры вращения, по которым осуществляется привод первого движущего колеса и второго движущего колеса, не превышают заданный предел количественных параметров вращения.
[16] Когда разность между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса, которые воспринимаются датчиком колес, больше, чем некоторое заданное значение, или равно ему, или когда направление вращения первого движущего колеса и направление вращения второго движущего колеса отличаются друг от друга, контроллер может обеспечивать осуществление привода первого движущего колеса и второго движущего колеса в заданном режиме предотвращения затруднения продвижения и может обеспечивать осуществление привода первого движущего колеса и второго движущего колеса таким образом, что основной корпус следует за блоком всасывания, на основе воспринимаемых датчиком колес вращения первого движущего колеса и вращения второго движущего колеса.
[17] Режим предотвращения затруднения продвижения может включать в себя первый режим предотвращения затруднения продвижения, а когда разность между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса больше, чем заданное значение, или равна ему, контроллер может обеспечивать осуществление привода только одного из первого движущего колеса и второго движущего колеса, которое имеет меньший количественный параметр вращения, или обеспечивать осуществление привода первого движущего колеса и второго движущего колеса таким образом, что указанное одно движущее колесо будет иметь больший количественный параметр вращения, чем другое движущее колесо, в соответствии с первым режимом предотвращения. Когда направление вращения первого движущего колеса и направление вращения второго движущего колеса отличаются друг от друга, контроллер может обеспечивать осуществление привода первого движущего колеса и второго движущего колеса в направлениях, противоположных воспринимаемым датчиком колес направлениям вращения первого движущего колеса и второго движущего колеса.
[18] Режим предотвращения затруднения продвижения может дополнительно включать в себя второй режим предотвращения затруднения продвижения, а контроллер может обеспечивать осуществление привода первого движущего колеса и второго движущего колеса по заданному количественному параметру вращения в одном и том же направлении вращения в соответствии со вторым режимом предотвращения затруднения продвижения до или после первого режима предотвращения затруднения продвижения.
[19] Автономное подвижное устройство для очистки может дополнительно включать в себя датчик столкновения, который предусмотрен в основном корпусе и конфигурация которого обеспечивает восприятие препятствия спереди, а контроллер может обеспечивать осуществление привода первого и второго движущих колес в соответствии с заданным режимом обхода препятствия для обхода препятствия, на основе положения препятствия, воспринимаемого датчиком столкновения, и обеспечивать осуществление привода первого и второго движущих колес таким образом, что основной корпус следует за блоком всасывания, на основе воспринимаемых датчиком колес вращения первого движущего колеса и вращения второго движущего колеса.
[20] Режим обхода препятствия может включать в себя первый режим обхода препятствия, а для поворота основного корпуса с целью перемещения в направлении, противоположном положению препятствия, в соответствии с первым режимом обхода препятствия, контроллер может обеспечивать осуществление привода только одного из первого движущего колеса и второго движущего колеса, которое находится ближе к препятствию, воспринимаемому датчиком столкновения, обеспечивать осуществление привода первого и второго движущих колес таким образом, что указанное одно движущее колесо имеет больший количественный параметр вращения, чем другое движущее колесо, или обеспечивать осуществление привода первого и второго движущих колес в противоположных направлениях.
[21] Режим обхода препятствия может дополнительно включать в себя второй режим обхода препятствия, а контроллер может обеспечивать осуществление привода первого движущего колеса и второго движущего колеса по заданному количественному параметру вращения в одном и том же направлении вращения в соответствии со вторым режимом предотвращения затруднения продвижения до или после первого режима предотвращения затруднения продвижения.
[22] Предложен также способ управления автономным подвижным устройством для очистки, включающим в себя основной корпус, блок всасывания, который имеет ручку и конфигурация которого обеспечивает всасывание окружающего инородного материала, воздушный шланг, конфигурация которого обеспечивает соединение основного корпуса и блока всасывания и направление инородного материала в основной корпус, по меньшей мере одно движущее колесо, установленное под основным корпусом, и блок привода, конфигурация которого обеспечивает осуществление привода движущего колеса посредством работы приводного электродвигателя, при этом способ управления включает в себя этапы, на которых воспринимают вращение движущего колеса посредством датчика колес и управляют перемещением основного корпуса посредством блока привода на основе воспринимаемого вращения движущего колеса посредством контроллера.
[23] Контроллер может дополнительно предусматривать обеспечение остановки привода движущего колеса.
[24] Восприятие вращения движущего колеса может включать в себя этап, на котором воспринимают вращение первого движущего колеса, расположенного на левой стороне основного корпуса, и вращение второго движущего колеса, расположенного на правой стороне основного корпуса, а управление перемещением основного корпуса может включать в себя этап, на котором индивидуально управляют первым движущим колесом и вторым движущим колесом на основе воспринимаемого датчиком колес вращения первого движущего колеса и второго движущего колеса.
[25] Управление перемещением основного корпуса может включать в себя осуществление привода первого движущего колеса и второго движущего колеса в том же направлении, что и воспринимаемые датчиком колес направления вращения первого движущего колеса и второго движущего колеса.
[26] Управление перемещением основного корпуса может включать в себя осуществление привода первого движущего колеса и второго движущего колеса в соответствии с количественными параметрами вращения первого движущего колеса и второго движущего колеса, воспринимаемыми датчиком колес.
[27] При осуществлении управления перемещением основного корпуса, количественные параметры вращения, по которым осуществляется привод первого движущего колеса и второго движущего колеса, могут быть больше, чем количественные параметры вращения первого движущего колеса и второго движущего колеса, воспринимаемые датчиком колес.
[28] Управление перемещением основного корпуса может включать в себя осуществление привода первого и второго движущих колес таким образом, что количественные параметры вращения, по которым осуществляют привод первого и второго движущих колес, не превышают заданный предел количественных параметров вращения.
[29] Управление перемещением основного корпуса может включать в себя определение того больше ли разность между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса, которые воспринимаются датчиком колес, чем некоторое заданное значение, или равно ему; когда разность между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса больше, чем указанное заданное значение, или равно ему, проводят первый этап предотвращения затруднения продвижения, на котором осуществляют привод только одного из первого движущего колеса и второго движущего колеса, которое имеет меньший количественный параметр вращения, или осуществляют привод первого движущего колеса и второго движущего колеса таким образом, что указанное одно движущее колесо будет иметь больший количественный параметр вращения, чем другое движущее колесо, и осуществляют привод первого движущего колеса и второго движущего колеса таким образом, что основной корпус следует за блоком всасывания, на основе воспринимаемого датчиком колес вращения первого движущего колеса и второго движущего колеса.
[30] Управление перемещением основного корпуса может включать в себя определение того, отличаются ли друг от друга направление вращения первого движущего колеса и направление вращения второго движущего колеса, и проведение первого этапа предотвращения при движении, на котором осуществляют привод первого движущего колеса и второго движущего колеса в направлениях, противоположных направлениям вращения первого и второго движущих колес, воспринимаемым датчиком колес, когда направление вращения первого движущего колеса и направление вращения второго движущего колеса отличаются друг от друга, и осуществляют привод первого движущего колеса и второго движущего колеса таким образом, что основной корпус будет следовать за блоком всасывания, на основе воспринимаемого датчиком колес вращения первого движущего колеса и второго движущего колеса.
[31] Управление перемещением основного корпуса может дополнительно включать в себя второй этап предотвращения затруднения продвижения, на котором осуществляют привод первого и второго движущих колес по заданному количественному параметру вращения в одном и том же направлении вращения до и/или после первого этапа предотвращения затруднения продвижения.
[32] Управление перемещением основного корпуса может включать в себя восприятие положения препятствия посредством датчика столкновения, который воспринимает препятствие спереди, этап обхода препятствия, на котором осуществляют привод первого и второго движущих колес в соответствии с заданным режимом обхода препятствия, чтобы обойти препятствие, на основе положения воспринятого препятствия, и осуществление привода первого и второго движущих колес таким образом, что основной корпус будет следовать за блоком всасывания, на основе воспринимаемых датчиком колес вращения первого движущего колеса и вращения второго движущего колеса.
[33] Обход препятствия может включать в себя первый этап обхода препятствия, на котором осуществляют привод только одного из первого движущего колеса и второго движущего колеса, которое ближе к препятствию, воспринимаемому датчиком столкновения, осуществление привода первого и второго движущих колес таким образом, что указанное одно движущее колесо имеет больший количественный параметр вращения, чем другое движущее колесо, или осуществление привода первого и второго движущих колес в противоположных направлениях для поворота основного корпуса с целью перемещения в направлении, противоположном положению препятствия.
[34] Обход препятствия может дополнительно включать в себя второй этап обхода препятствия, на котором осуществляют привод первого и второго движущих колес по заданному количественному параметру вращения в одном и том же направлении до и/или после первого этапа предотвращения затруднения продвижения.
[35] Предложен также машиночитаемый носитель записи, хранящий компьютерную программу для осуществления способа управления автономным подвижным устройством для очистки.
[36] Дополнительная сфера применения данной заявки выяснится из подробного описания, приводимого ниже. Вместе с тем, следует понять, что, хотя предпочтительные варианты осуществления изобретения и указаны в этом подробном описании и конкретных примерах, они приводятся лишь для иллюстрации, поскольку из подробного описания специалистам в данной области техники станут ясными различные изменения и модификации, которые можно внести в рамках существа и объема притязаний изобретения.
Полезные эффекты изобретения
[37] В соответствии с автономным подвижным устройством для очистки и способом управления им в соответствии с вариантом осуществления данного изобретения, можно предотвратить блокировку ультразвукового сигнала препятствием, или предотвратить неправильное срабатывание из-за ультразвукового сигнала, отражаемого окружающими предметами, потому что ультразвуковые волны не используются, когда основной корпус устройства для очистки перемещают так, что он следует за блоком всасывания.
[38] В соответствии с автономным подвижным устройством для очистки и способом управления им в соответствии с вариантом осуществления данного изобретения, также появляется возможность минимизировать силу притяжения, прикладываемую пользователем к основному корпусу, и устранить вероятность того, что пользователь получит удар основным корпусом, поддерживая заданное расстояние между основным корпусом и блоком всасывания, и снизить вероятность повреждения воздушного шланга внешней силой, минимизируя силу растяжения, прикладываемую к воздушному шлангу.
[39]
Краткое описание чертежей
[40] Прилагаемые чертежи, которые включены в состав этого описания, чтобы обеспечить дополнительное понимание изобретения присутствуют в нем, составляя его часть, иллюстрируют возможные варианты осуществления и вместе с описанием служат для пояснения принципов изобретения.
[41] На чертежах:
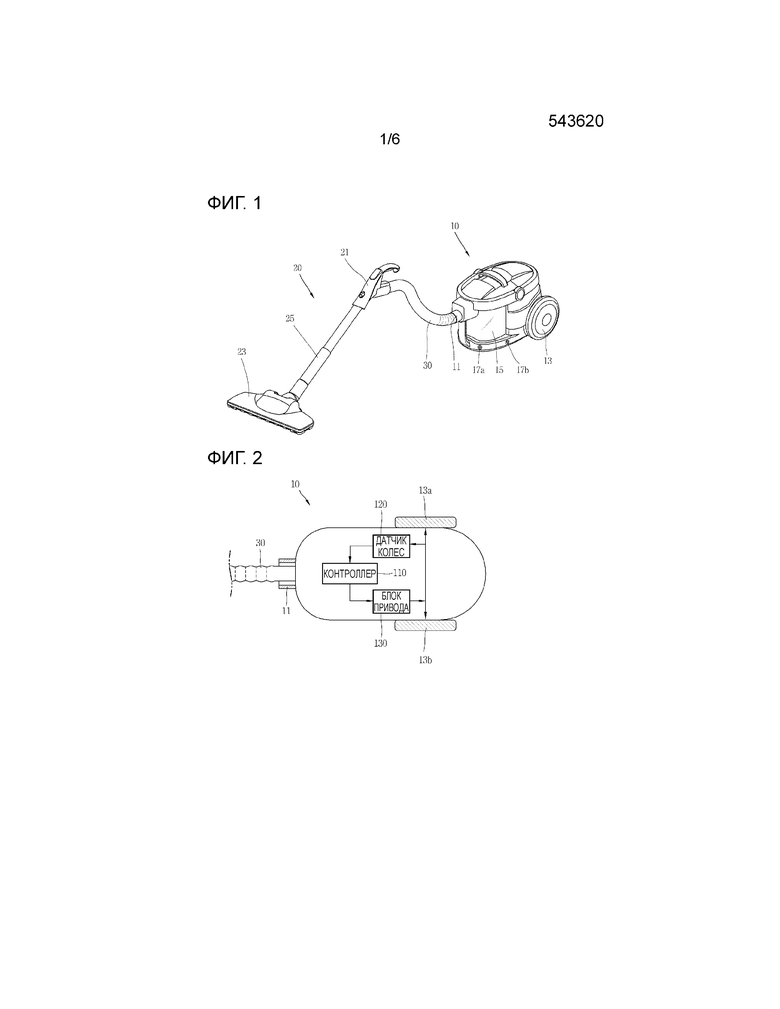
[42] на фиг.1 представлен вид в перспективе автономного подвижного устройства для очистки в соответствии с вариантом осуществления данного изобретения;
[43] на фиг.2 представлена блок-схема для описания работы автономного подвижного устройства для очистки в соответствии с вариантом осуществления данного изобретения;
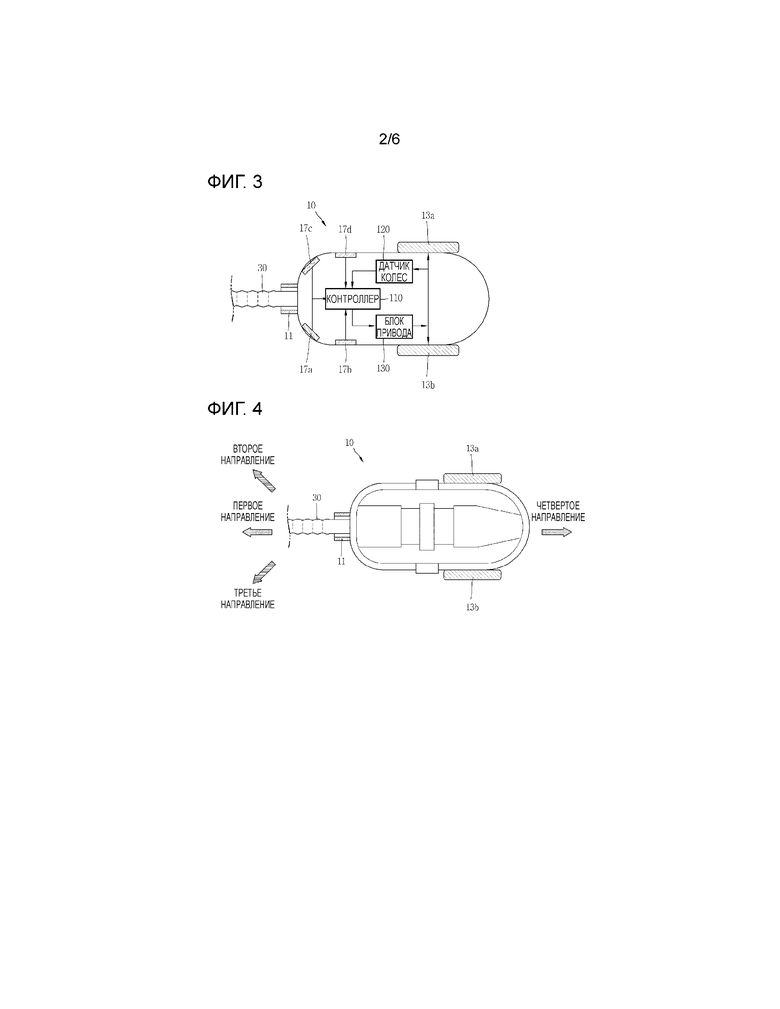
[44] на фиг.3 представлена блок-схема для описания работы автономного подвижного устройства для очистки в соответствии с другим вариантом осуществления данного изобретения;
[45] на фиг.4 представлена схема для описания перемещения автономного подвижного устройства для очистки в соответствии с вариантом осуществления данного изобретения;
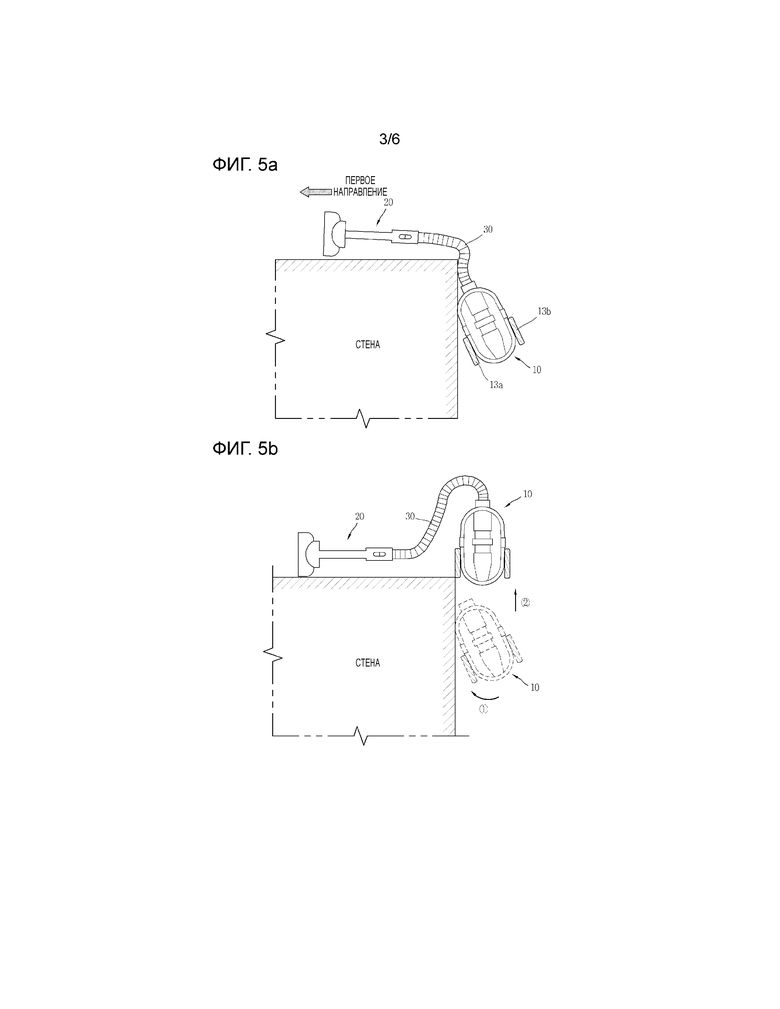
[46] на фиг.5A представлена схема, иллюстрирующая пример, в котором автономное подвижное устройство для очистки испытывает затруднение продвижения, в соответствии с вариантом осуществления данного изобретения;
[47] на фиг.5B и 5C представлены схемы, иллюстрирующие пример исключения затруднения продвижения автономного подвижного устройства для очистки, испытавшего затруднение продвижения, в соответствии с вариантом осуществления данного изобретения;
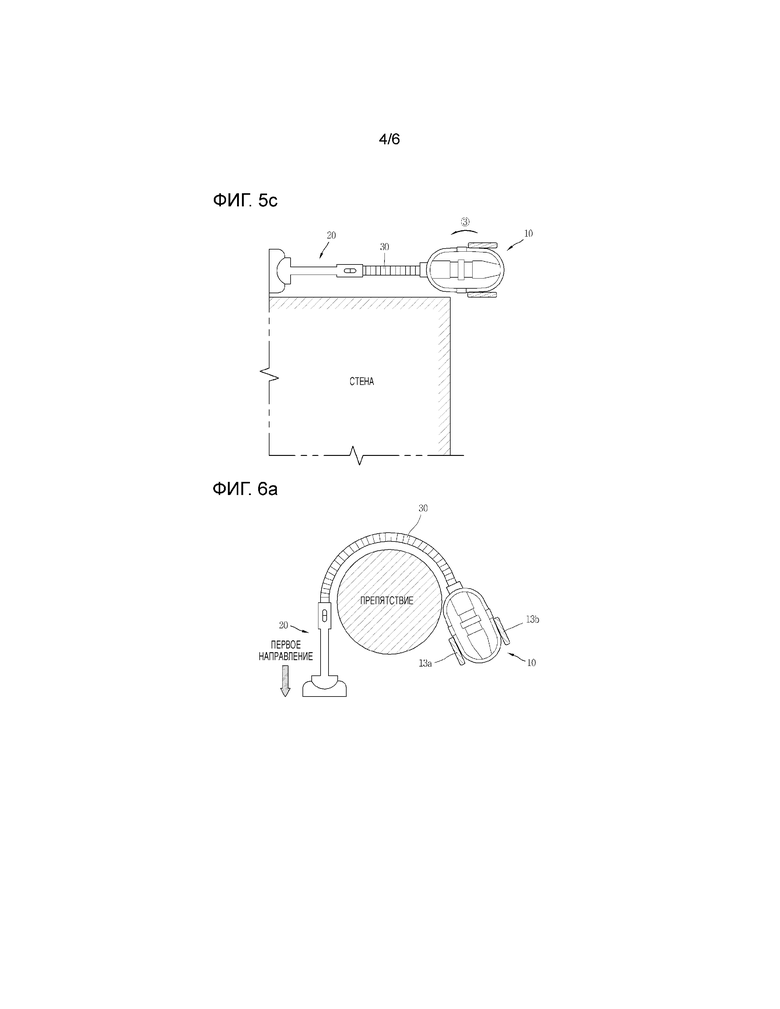
[48] на фиг.6A представлена схема, иллюстрирующая пример, в котором автономное подвижное устройство для очистки встречается с препятствием, в соответствии с вариантом осуществления данного изобретения;
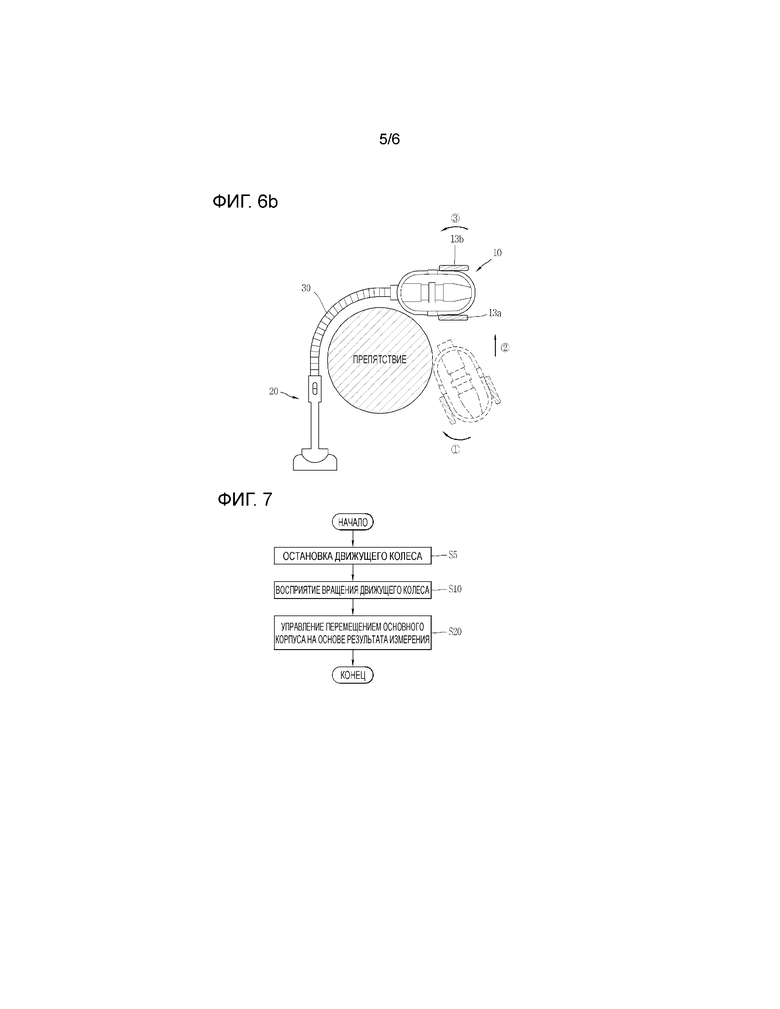
[49] на фиг.6B представлена схема, иллюстрирующая пример, в котором автономное подвижное устройство для очистки перемещается, обходя препятствие, в соответствии с вариантом осуществления данного изобретения;
[50] на фиг.7 представлена блок-схема последовательности операций, иллюстрирующая способ управления автономным подвижным устройством для очистки в соответствии с вариантом осуществления данного изобретения; и
[51] на фиг.8 и 9 представлены блок-схемы последовательности операций, иллюстрирующие способ управления автономным подвижным устройством для очистки в соответствии с другим вариантом осуществления данного изобретения.
Описание предпочтительного варианта осуществления изобретения
[52] Теперь, со ссылками на прилагаемые чертежи, будет приведено подробное описание предпочтительных конфигураций автономного подвижного устройства для очистки и способа управления им в соответствии с данным изобретением.
[53] На фиг.1 представлено вид в перспективе автономного подвижного устройства для очистки в соответствии с вариантом осуществления данного изобретения.
[54] Как показано на фиг.1, автономное подвижное устройство для очистки в соответствии с вариантом осуществления данного изобретения может включать в себя основной корпус 10, блок 20 всасывания, который имеет ручку и конфигурация которого обеспечивает всасывание окружающего инородного материала, воздушный шланг 30, конфигурация которого обеспечивает соединение основного корпуса 10 и блока 20 всасывания и направление инородного материала в основной корпус 10, по меньшей мере одно движущее колесо 13, установленное под основным корпусом 10, блок 130 привода, конфигурация которого обеспечивает осуществление привода движущего колеса посредством работы электродвигателя привода и перемещение основного корпуса следом за блоком 20 всасывания, датчик 120 колес, конфигурация которого обеспечивает восприятие вращения движущего колеса, и контроллер 110, конфигурация которого обеспечивает управление перемещением основного корпуса посредством блока 130 привода на основе воспринимаемого датчиком колес вращения движущего колеса.
[55] В этом случае следует понимать, что перечисленные элементы несущественны, а автономное подвижное устройство для очистки можно воплотить посредством количества элементов, большего или меньшего, чем количество перечисленных элементов.
[56] Каждый из элементов будет описан ниже.
[57] Основной корпус 10 может включать в себя пылесборное устройство 15, которое установлено с возможностью отсоединения. Пылесборное устройство 15 можно назвать пылеотделительным устройством. Пылесборное устройство 15 может быть установлено с возможностью отсоединения в передней части основного корпуса 10. С пылесборным устройством 15 можно объединить с возможностью разъединения различные фильтры. Посредством вращения всасывающего электродвигателя создается сила всасывания. Когда воздух, всасываемый посредством создаваемой силы всасывания, проходит через пылесборное устройство 15, пыль отделяется от воздуха и сохраняется в пылесборном устройстве 15.
[58] Блок 20 всасывания включает в себя ручку 21, дающую пользователю возможность манипулировать работой автономного подвижного устройства для очистки. Кроме того, блок 20 всасывания включает в себя всасывающую головку 23, располагаемую на поверхности пола, для всасывания инородного материала и воздуха. На нижней поверхности всасывающей головки выполнено всасывающее отверстие, конфигурация которого обеспечивает всасывание инородного материала, такого, как пыль на поверхности пола, и воздуха. Во всасывающем отверстии выполнена мешалка, конфигурация которой обеспечивает направление инородного материала, такого, как пыль, во всасывающее отверстие. Блок 20 всасывания может дополнительно включать в себя удлинительную трубку 25, конфигурация которой обеспечивает соединение ручки 21 и всасывающей головки 23.
[59] Воздушный шланг 30 может быть сформирован складным. Кроме того, воздушный шланг 30 может быть выполнен из синтетической смолы, и т.д. Воздушный шланг 30 имеет одну сторону, соединенную с блоком 20 всасывания, и другую сторону, соединенную с основным корпусом 10, то есть, соединительной трубкой 11.
[60] Кроме того, автономное подвижное устройство для очистки в соответствии с вариантом осуществления данного изобретения может включать в себя источник питания (не показан) для подачи питания, по меньшей мере на один из элементов, входящих в состав автономного подвижного устройства для очистки.
[61] Источник питания может включать в себя батарею или портативный батарейный источник питания, что позволяет аккумулировать мощность, подаваемую из устройства, являющегося внешним источником питания.
[62] В этом случае, источник питания может принимать мощность из устройства, являющегося внешним устройством питания, при осуществлении способов проводной или беспроводной связи. То есть, источник питания может быть непосредственно соединен с устройством, являющимся внешним источником питания, посредством такого элемента, как штепсельная розетка, или соединен беспроводным образом с устройством, являющимся внешним источником питания, посредством любого из способа магнитно-резонансной связи, способа электромагнитной индукции и способа радиоволн с целью приема мощности.
[63] Под основным корпусом 10 может быть установлено движущее колесо 13, конфигурация которого обеспечивает перемещение основного корпуса.
[64] Таким образом, блок 130 привода может включать в себя электродвигатель привода (не показан) и осуществлять привод движущего колеса посредством работы электродвигателя привода в соответствии с управляющим сигналом, подаваемым на двигатель привода. В данном случае, управляющим сигналом, подаваемым на двигатель привода, может быть сигнал перемещения основного корпуса 10 вперед или назад, либо вращения или остановки основного корпуса 10.
[65] Кроме того, автономное подвижное устройство для очистки в соответствии с вариантом осуществления данного изобретения может дополнительно включать в себя вспомогательное колесо, привод которого не осуществляет электродвигатель привода и конфигурация которого обеспечивает содействие вращению движущего колеса.
[66] Датчик 120 колес может воспринимать вращение движущего колеса 13.
[67] Датчик 120 колес может быть соединен с левым и правым движущими колесами 13, а его конфигурация обеспечивает восприятие чисел оборотов правого и левого движущих колес 13. В данном случае, датчик 120 колес может быть преобразователем угол-код. Когда основной корпус перемещается, преобразователь угол-код может измерять числа оборотов правого и левого движущих колес 13.
[68] Датчик 120 колес можно использовать для управления числами оборотов движущих колес 13. Вместе с тем, как описывается ниже, когда пользователь, который берется за ручку, входящего в состав блока 20 всасывания, прикладывает силу притяжения к основному корпусу 10 посредством воздушного шланга 30, контроллер 110 может оценить силу притяжения, посредством которой пользователь воздействует на основной корпус 10.
[69] Контроллер 110 может использовать числа оборотов правого и левого движущих колес, выдаваемые из датчика 120 колес, для вычисления скоростей вращения правого и левого движущих колес 13, или может использовать разность между числами оборотов левого колеса и правого колеса для вычисления угла поворота основного корпуса.
[70] Соответственно, контроллер 110 управляет перемещением основного корпуса 10 посредством блока 130 привода на основе вращения движущего колеса, в частности, на основе числа оборотов или скорости вращения движущего колеса. Говоря подробнее, контроллер 110 может определять рабочее намерение пользователя (переместить вперед, переместить назад или повернуть) на основе воспринимаемых датчиком 120 колес чисел оборотов или скоростей вращения правого и левого движущих колес 13 и может управлять вращением правого и левого движущих колес 13 посредством блока 130 привода таким образом, что основной корпус 10 последует за ручкой или блоком 20 всасывания, включающим в себя ручку, в соответствии с результатом определения, и поэтому можно перемещать основной корпус 10 автономно в соответствии с рабочим намерением пользователя.
[71] Чтобы определить рабочее намерение пользователя, контроллер 110 не ограничивается тем, перемещается ли основной корпус 10 (или тем, осуществляется ли привод блоком 130 привода), когда контроллер 110 воспринимает вращение левого и правого движущих колес посредством датчика 120 колес. Говоря подробнее, в соответствии с вариантом осуществления, когда блок 130 привода не осуществляет привод движущего колеса 13, контроллер 110 может определять рабочее намерение пользователя на основе воспринимаемых датчиком 120 колес чисел оборотов или скоростей вращения правого и левого движущих колес и может управлять перемещением основного корпуса 10 в соответствии с этим определением. Кроме того, в соответствии с другим вариантом осуществления, когда блок 130 привода осуществляет привод движущего колеса 13, контроллер 110 может определять рабочее намерение пользователя на основе разности между управляющим сигналом, подаваемым на двигатель привода, передаваемым на блок 130 привода, и воспринимаемыми датчиком 120 колес числами оборотов или скоростей вращения движущих колес, и таким образом может управлять перемещением основного корпуса 10. Кроме того, в соответствии с другим вариантом осуществления, перед восприятием вращения движущего колеса 13 посредством датчика 120 колес, контроллер 110 может передать сигнал остановки в блок 130 привода, чтобы остановить вращение движущего колеса 13, воспринять число оборотов движущего колеса посредством датчика 120 колес, и определить рабочие намерения пользователя на основе измеренного числа оборотов.
[72] Датчик 120 колес может воспринимать и выдавать вращение первого движущего колеса 13a, расположенного на левой стороне, и вращение второго движущего колеса 13b, расположенного на правой стороне, на основе направления движения основного корпуса 10, то есть, направления (именуемого здесь и далее направлением вперед), в котором объединяют воздушный шланг 30 с блоком всасывания для соединения.
[73] Таким образом, контроллер 110 может индивидуально управлять первым и вторым движущими колесами 13 посредством блока 130 привода на основе воспринимаемого датчиком 120 колес вращения (например - на основе направления вращения или на основе количественных параметрах вращения) первого и второго движущих колес 13. В данном случае, количество и положения движущих колес может быть изменено в зависимости от конструкции. Основной корпус 10 может перемещаться (например, двигаться по прямой линии, двигаться по кривой, или поворачивать) посредством первого и второго движущих колес 13, привод которых осуществляется независимо.
[74] Говоря подробнее, контроллер 110 может обеспечивать осуществление привода первого движущего колеса 13a и второго движущего колеса 13b на основе воспринимаемого датчиком 120 колес направления вращения. В этом случае, первое и второе движущие колеса 13 могут вращаться в таком же направлении, как воспринимаемое датчиком 120 колес направление вращения первого и второго движущих колес 13, так что основной корпус 10 перемещается, следуя за блоком 20 всасывания.
[75] Кроме того, контроллер 110 может обеспечивать осуществление привода первого движущего колеса 13a и второго движущего колеса 13b на основе воспринимаемого датчиком 120 колес количественного параметра вращения (который может обозначать некоторую физическую величину, включая число оборотов или скорость вращения). Вместе с тем, контроллер 110 может управлять вращением движущих колес посредством количественного параметра вращения, большего, чем количественный параметр вращения, воспринимаемый датчиком 120 колес. То есть, чтобы уменьшить силу, с которой пользователь тянет основной корпус 10 за ручку, основной корпус 10 можно перемещать, пользуясь количественным параметром вращения, который больше, чем воспринимаемый количественный параметр вращения.
[76] В качестве примера, показанного на фиг.4, отметим, что когда блок 20 всасывания прикладывает силу притяжения к основному корпусу 10 в первом направлении, датчик 120 колес воспринимает вращение первого движущего колеса 13a и второго движущего колеса 13b, которые вращаются на основе одного и того же количественного параметра вращения в одном и том же направлении (направлении, в котором движущее колесо 13 вращается, когда основной корпус перемещается в направлении вперед). Контроллер 110 может управлять первым движущим колесом 13a и вторым движущим колесом 13b, привод которых осуществляют на основе количественного параметра вращения, большем, чем количественный параметр вращения, воспринимаемый с первого движущего колеса 13a и второго движущего колеса 13b в том же направлении, что и воспринимаемое направление вращения, вследствие чего обеспечивается перемещение основного корпуса 10 в первом направлении.
[77] В качестве еще одного примера, показанного на фиг.4, отметим, что когда блок 20 всасывания прикладывает силу притяжения к основному корпусу 10 во втором направлении (или третьем направлении), датчик 120 колес воспринимает вращение первого движущего колеса 13а и второго движущего колеса 13b, которые вращаются на основании других количественных параметров вращения в том же направлении (направлении, в котором движущее колесо 13 вращается, когда основной корпус перемещается в направлении вперед), или воспринимает вращение первого движущего колеса 13а и второго движущего колеса 13b, которые вращаются на основе одних и тех же или отличающихся количественных параметров вращения в других направлениях вдоль второго направления. Контроллер 110 может управлять первым движущим колесом 13a и вторым движущим колесом 13b, привод которых осуществляют на основе количественного параметра вращения, большего, чем количественный параметр вращения, воспринимаемый с первого движущего колеса 13a и второго движущего колеса 13b в том же направлении, что и воспринимаемое направление вращения, вследствие чего обеспечивается возможность поворота и/или перемещения основного корпуса 10 во втором направлении (или третьем направлении).
[78] В качестве еще одного примера, показанного на фиг.4, отметим, что когда блок 20 всасывания прикладывает силу отталкивания к основному корпусу 10 в четвертом направлении, датчик 120 колес воспринимает вращение первого движущего колеса 13а и второго движущего колеса 13b, которые вращаются на основе того же количественного параметра вращения в том же направлении (направлении, в котором движущее колесо 13 вращается, когда основной корпус перемещается в направлении назад). Контроллер 110 может управлять первым движущим колесом 13a и вторым движущим колесом 13b, привод которых осуществляют на основе количественного параметра вращения, большем, чем количественный параметр вращения, воспринимаемый с первого движущего колеса 13a и второго движущего колеса 13b в том же направлении, что и воспринимаемое направление вращения, вследствие чего обеспечивается возможность перемещения основного корпуса 10 в четвертом направлении.
[79] В этом случае, контроллер 110 может обеспечивать осуществление привода первого и второго движущих колес 13 таким образом, что количественным параметром вращения, на основе которого осуществляют привод первого и второго движущих колес 13, не будет превышать заданный предел количественных параметров вращения.
[80] То есть, когда контроллер 110 обеспечивает осуществление привода движущего колеса 13 посредством блока 130 привода на основе воспринимаемого датчиком 120 колес количественного параметра вращения, контроллер 110 может управлять первым и вторым движущими колесами 13 таким образом, что число оборотов или скорость вращения не будет превышать заданный предел числа оборотов или заданный предел скорости вращения, соответственно, тем самым давая пользователю возможность предотвратить получение удара от основного корпуса 10 и предотвратить запутывание воздушного шланга из-за поворота основного корпуса.
[81] В данном случае, предел количественных параметров вращения можно установить как количественный параметр вращения первого движущего колеса 13a и/или второго движущего 13b за один цикл, когда в качестве одного цикла рассматривается ряд процессов, в ходе которых датчик 120 колес воспринимает количественный параметр вращения движущего колеса 13, а блок 130 привода осуществляет привод движущего колеса в соответствии с воспринимаемым количественным параметром вращения.
[82] Когда контроллер 110 управляет перемещением основного корпуса 10 таким образом, что основной корпус 10 следует за блоком 20 всасывания, контроллер 110 может управлять блоком 130 привода таким образом, что расстояние между блоком 20 всасывания, включающим в себя ручку, захватываемую пользователем, и основным корпусом 10 будет поддерживаться на уровне заданного расстояния (иди в определенном диапазоне расстояния) на основе воспринимаемых датчиком 120 колес чисел оборотов или скоростей вращения правого и левого движущих колес 13.
[83] В данном случае, пользователь может установить или ввести заданное расстояние заранее. Заданное расстояние можно установить с определенным соотношением, основанным на длине воздушного шланга 30. В качестве примера, отметим, что, когда длина воздушного шланга принимается от пользователя, контроллер 110 может установить в качестве заданного расстояния некоторое значение, вычисляемое путем применения определенного соотношения, соответствующего принимаемой длине воздушного шланга.
[84] Автономное подвижное устройство для очистки в соответствии с вариантом осуществления данного изобретения может определять, ограничено ли перемещение основного корпуса 10, и может обеспечивать осуществление обходного поворота, устраняя с дороги элемент, приводящий к ограничению перемещения, в соответствии с результатом определения и обеспечивая таким образом основному корпусу 10 возможность непрерывно следовать за блоком 20 всасывания.
[85] В соответствии с вариантом осуществления, контроллер 110 может определять, что основной корпус 10 испытывает затруднение продвижения, когда разность между количественными параметрами вращения движущих колес, воспринимаемыми датчиком 120 колес, больше заданного значения или равна ему, или направления вращения движущих колес отличаются друг от друга.
[86] На фиг.5A представлен чертеж, иллюстрирующий пример, в котором автономное подвижное устройство для очистки испытывает затруднение продвижения, в соответствии с вариантом осуществления данного изобретения.
[87] Как показано на фиг.5A, когда основной корпус 10 имеет одну сторону, находящуюся в контакте со стеной, а пользователь тащит блок 20 всасывания в первом направлении, возможна разность в количественном параметре и/или направлении вращения между первым движущим колесом 13a и вторым движущим колесом 13b, воспринимаемая посредством датчика 120 колес.
[88] В основном корпусе 10, сила притяжения в первом направлении может вызвать ситуацию, в которой количественный параметр вращения первого движущего колеса 13a, установленного рядом со стеной, окажется меньшим, чем количественный параметр вращения второго движущего колеса 13b, установленного в другом положении, и может вызвать ситуацию, в которой направление вращения первого движущего колеса 13a окажется противоположным направлению вращения второго движущего колеса 13b.
[89] Соответственно, когда разность между количественным параметром вращения первого движущего колеса 13a и количественным параметром вращения второго движущего колеса 13b, воспринимаемая посредством датчика 120 колес, больше, чем указанное заданное значение, или равно ему, а направление вращения первого движущего колеса 13a и направление вращения второго движущего колеса 13b отличаются друг от друга, контроллер 110 может определить, что основной корпус 10 испытывает затруднение продвижения, и обеспечить осуществление привода первого и второго движущих колес 13 в заданном режиме предотвращения затруднения продвижения или обеспечить перемещение основного корпуса 10 в режиме предотвращения затруднения продвижения таким образом, что затруднение продвижения основного корпуса будет исключено, после чего он последует за блоком 20 всасывания.
[90] Режим предотвращения затруднения продвижения может включать в себя первый режим предотвращения затруднения продвижения и/или второй режим предотвращения затруднения продвижения.
[91] Когда разность между количественным параметром вращения первого движущего колеса 13a и количественным параметром вращения второго движущего колеса 13b больше, чем указанное заданное значение, или равно ему, контроллер 110 обеспечивает осуществление привода только одного из первого и второго движущих колес 13, которое имеет меньший количественный параметр вращения, или осуществление привода первого и второго движущих колес 13 таким образом, что указанное одно движущее колесо будет иметь больший количественный параметр вращения, чем другое движущее колесо. Когда направление вращения первого движущего колеса 13a и направление вращения второго движущего колеса 13b отличаются друг от друга, контроллер 110 может обеспечивать осуществление привода первого движущего колеса 13a и второго движущего колеса 13b в направлениях, противоположных воспринимаемым датчиком 120 колес направлениям вращения первого движущего колеса 13a и второго движущего колеса 13b.
[92] Кроме того, контроллер 110 может обеспечивать осуществление привода первого движущего колеса 13a и второго движущего колеса 13b по заданному количественному параметру вращения в одном и том же направлении в соответствии со вторым режимом предотвращения затруднения продвижения до или после первого режима предотвращения затруднения продвижения, чтобы переместить основной корпус 10 вперед или назад.
[93] То есть, контроллер 110 может перемещать основной корпус 10 назад на заданное расстояние таким образом, что основной корпус 10 легко повернется в соответствии с первым режимом предотвращения затруднения продвижения, управляя перемещением основного корпуса 10 в соответствии со вторым режимом предотвращения затруднения продвижения до первого режима предотвращения затруднения продвижения. Кроме того, контроллер 110 может гарантировать направление движения, в котором затруднение продвижения основного корпуса 10 будет предотвращено в соответствии с первым режимом предотвращения затруднения продвижения, и сможет способствовать тому, что затруднение продвижения основного корпуса 10 будет исключено в соответствии со вторым режимом предотвращения затруднения продвижения, управляя перемещением основного корпуса 10 в соответствии со вторым режимом предотвращения затруднения продвижения после первого режима предотвращения затруднения продвижения.
[94] После этого, контроллер 110 может обеспечивать осуществление привода движущего колеса 13 на основе воспринимаемого датчиком 120 колес количественного параметра вращения таким образом, что основной корпус 10 последует за блоком 20 всасывания, включающим в себя ручку.
[95] В качестве примера, показанного на фиг.5B, отметим, что для исключения затруднения продвижения основного корпуса 10, испытавшего затруднение продвижения, контроллер 110 - поскольку количественный параметр вращения первого движущего колеса 13a, расположенного рядом со стеной, меньше, чем количественный параметр вращения второго движущего колеса 13b, - сможет обеспечить поворот основного корпуса 10 в направлении ① посредством осуществления привода первого и второго движущих колес 13 в этом направлении вперед таким образом, что количественный параметр вращения первого движущего колеса 13a, который был меньше, чем количественный параметр вращения второго движущего колеса 13b, станет больше, чем количественный параметр вращения второго движущего колеса 13b.
[96] С другой стороны, поскольку направление вращения первого движущего колеса 13a воспринимается как направление, противоположное направлению вперед, или направление вращения второго движущего колеса 13b воспринимается как направление вперед посредством датчика 120 колес, контроллер 110 сможет обеспечить поворот основного корпуса 10 в направлении ① посредством осуществления привода первого и второго движущих колес 13 в направлениях, противоположных воспринимаемым направлениям вращения первого и второго движущих колес 13.
[97] После этого, контроллер 110 сможет обеспечить поворот основного корпуса 10 для перемещения в направлении ② посредством осуществления привода первого и второго движущих колес 13 по заданному количественному параметру вращения в направлении вперед таким образом, что основной корпус 10 переместится вперед на заданное расстояние, и таким образом окажется возможным исключение затруднения продвижения основного корпуса 10.
[98] После этого, контроллер 110 сможет обеспечить поворот для перемещения в направлении ③, обеспечивая осуществление привода движущего колеса 13 на основе воспринимаемого датчиком 120 колес количественного параметра вращения.
[99] Как описано выше, контроллер 110 может управлять движущими колесами 13 таким образом, что основной корпус 10 переместится назад на заданное расстояние, перед управлением движущим колесом 13 таким образом, что основной корпус 10 повернется в направлении ①.
[100] Автономное подвижное устройство для очистки в соответствии с вариантом осуществления данного изобретения может дополнительно включать в себя датчик 17 столкновения.
[101] Как показано на фиг.1 и 3, датчик 17 столкновения может быть заключен в основном корпусе 10 и воспринимать препятствие, находящееся перед датчиком 17 столкновения.
[102] Датчик 17 столкновения может быть установлен вдоль внешней поверхности основного корпуса 10. Можно расположить и установить множество датчиков 17a-17d столкновения на определенных расстояниях.
[103] Как показано на фиг.3, можно установить множество датчиков 17 столкновения на заданных расстояниях слева и справа относительно положения соединительной трубки 11, входящей в состав основного корпуса 10. В этом случае, на количество или положения датчиков 17 столкновения, устанавливаемых в основном корпусе 10, конкретных положений нет.
[104] Каждый датчиков 17 столкновения может воспринимать объект или препятствие впереди и может передавать воспринятую информацию в контроллер 110. Датчик 17 столкновения может воспринимать мебель, стену или аналогичное препятствие, чтобы передавать воспринятую информацию в контроллер 110.
[105] Примеры датчика 17 столкновения включают в себя инфракрасный датчик, ультразвуковой датчик, радиочастотный датчик, позиционно-чувствительное устройство (ПЧУ), и т.п.. В качестве датчика 17 столкновения, устанавливаемого в основном корпусе 10, можно использовать датчики одного типа или датчики разных типов.
[106] Вообще говоря, ультразвуковой датчик используют главным образом для восприятия отдаленного препятствия, и он может определять, присутствует ли препятствие, определяя, излучаются ли посредством блока излучения ультразвуковые волны, которые отражаются препятствием и принимаются принимающим блоком, и вычисляя расстояние до препятствия с использованием времени приема. В этом случае, передающий ультразвуковой датчик и принимающий ультразвуковой датчик можно располагать в чередующемся порядке на внешней поверхности основного корпуса 10.
[107] В датчике типа ПЧУ возможно использование поверхностного активного сопротивления полупроводника для обнаружения находящегося на малом или большом расстоянии положения падающего луча света посредством одного p-n перехода. Датчик типа ПЧУ включает в себя одномерный датчик типа ПЧУ, который обнаруживает луч света в только в одном - осевом - направлении, и двумерный датчик типа ПЧУ, который обнаруживает пятно света на плоской поверхности, причем оба они имеют структуру p-i-n фотодиода. Датчик типа ПЧУ, который представляет собой разновидность инфракрасного датчика, излучает инфракрасный свет на препятствие, чтобы воспринять препятствие, и измеряет расстояние с использованием времени, которое требуется для отражения света обратно. Датчик типа ПЧУ включает в себя светоизлучающий блок, излучающий инфракрасный свет на препятствие, и светопринимающий блок, принимающий инфракрасный свет, отражаемый обратно от препятствия, и в общем случае имеет конфигурацию модуля. Датчик типа ПЧУ может получать стабильное измеренное значение безотносительно отражательной способности препятствия и цветового различия.
[108] Таким образом, автономное подвижное устройство для очистки в соответствии с вариантом осуществления данного изобретения может обеспечивать осуществление привода первого и второго движущих колес 13 в соответствии с заданным режимом обхода препятствия таким образом, что обход препятствия будет происходить на основе положения препятствия, воспринимаемого датчиком столкновения, и может после этого обеспечивать осуществление привода первого и второго движущих колес 13 таким образом, что основной корпус 10 последует за блоком 20 всасывания.
[109] Режим обхода препятствия может включать в себя первый режим обхода препятствия и/или второй режим обхода препятствия.
[110] Чтобы переместить основной корпус 10 в направлении, противоположном положению препятствия, в соответствии с первым режимом обхода препятствия, контроллер 110 может обеспечивать осуществление привода только одного из первого и второго движущих колес 13, которое ближе к препятствию, воспринимаемому датчиком 17 столкновения, обеспечивать осуществление привода первого и второго движущих колес 13 таким образом, что указанное одно движущее колесо будет иметь больший количественный параметр вращения, чем другое движущее колесо, или обеспечивать осуществление привода первого и второго движущих колес в противоположных направлениях.
[111] Кроме того, контроллер 110 может обеспечивать осуществление привода первого движущего колеса 13a и второго движущего колеса 13b по заданному количественному параметру вращения в одном и том же направлении в соответствии со вторым режимом обхода препятствия до или после первого режима обхода препятствия для перемещения основного корпуса 10 вперед или назад.
[112] То есть, контроллер 110 может обеспечить осуществление перемещения основного корпуса 10 назад на заданное расстояние таким образом, что основной корпус 10 легко повернется в соответствии с первым режимом обхода препятствия, управляя перемещением основного корпуса 10 в соответствии со вторым режимом обхода препятствия до первого режима обхода препятствия. Кроме того, контроллер 110 может гарантировать направление движения, в котором основной корпус 10 обходит препятствие, в соответствии с первым режимом обхода препятствия, и может обеспечить освобождение основного корпуса 10 от препятствия в соответствии со вторым режимом обхода препятствия, управляя перемещением основного корпуса 10 в соответствии со вторым режимом обхода препятствия после первого режима обхода препятствия.
[113] После этого, контроллер 110 может обеспечивать осуществление привода движущего колеса 13 на основе воспринимаемого датчиком 120 колес количественного параметра вращения таким образом, что основной корпус 10 последует за блоком 20 всасывания, включающим в себя ручку.
[114] В качестве примера, показанного на фиг.6A, отметим, что когда препятствие расположено по одну сторону от основного корпуса 10, контроллер 110 может обеспечить восприятие препятствия посредством датчика 17 столкновения.
[115] Датчик столкновения, обозначенный позицией 17a среди множества датчиков 17a-17d столкновения, может воспринимать препятствие. Таким образом, чтобы основной корпус 10 обошел препятствие при перемещении, контроллер 110 может обеспечить осуществление поворота основного корпуса 10 в направлении, противоположном положению препятствия. Говоря подробнее, контроллер 110 может обеспечить осуществление поворота основного корпуса 10 в направлении ①, обеспечивая осуществление привода только первого движущего колеса 13a, близкого к препятствию, расположенному перед датчиком столкновения, обозначенным позицией 17, в направлении вперед, осуществление привода первого и второго движущих колес 13 в направлении вперед таким образом, что первое движущее колесо 13a будет иметь больший количественный параметр, чем второе движущее колесо 13b, или осуществление привода первого и второго движущих колес в противоположных направлениях.
[116] После этого, контроллер 110 может обеспечивать осуществление привода первого и второго движущих колес 13 по заданному количественному параметру вращения в направлении вперед таким образом, что основной корпус 10 переместится вперед на заданное расстояние, и поэтому основной корпус 10 сможет перемещаться в направлении ② и таким образом миновать препятствие.
[117] После этого, контроллер 110 может обеспечивать поворот основного корпуса 10 для перемещения в направлении ③, обеспечивая привод движущего колеса 13 на основе воспринимаемого датчиком 120 колес количественного параметра вращения.
[118] Как описано выше, контроллер 110 может управлять движущими колесами 13 таким образом, что основной корпус 10 переместится назад на заданное расстояние, перед управлением движущим колесом 13 таким образом, что основной корпус 10 повернется в направлении ①.
[119] Как описано выше, в автономном подвижном устройстве для очистки в соответствии с другим вариантом осуществления, контроллер 110 может определять, наткнулся ли основной корпус 10 на препятствие, посредством датчика 17 столкновения, и обеспечивать осуществление привода первого и второго движущих колес 13 посредством блока 130 привода, чтобы исключить затруднение продвижения основного корпуса 10 в соответствии с результатом определения.
[120] То есть, контроллер 110 может определять, не испытал ли основной корпус 10 затруднение продвижения на основе количественных параметров вращения или направлениях вращения первого и второго движущих колес 13, но - посредством датчика 17 столкновения. В соответствии с результатом определения, затруднение продвижения основного корпуса 10 может быть исключено.
[121] Описание этого является таким же, как приведенное со ссылками на фиг.5A-5C. Таким образом, повторное подробное описание этого будет опущено.
[122] Когда контроллер 110 принимает информацию об обнаружении препятствий из множества датчиков 17 столкновения, контроллер 110 может вычислять расстояния от основного корпуса 10 до множества препятствий и может управлять движущими колесами 13 таким образом, что основной корпус 10 переместится, предпочтительно - обходя ближайшее препятствие в соответствии с режимом обхода препятствия, на основе на информации, касающейся множества расстояний. После этого, повторяя обнаружение препятствий и режим обхода препятствия, контроллер 110 может обеспечить перемещение основного корпуса 10 таким образом, что основной корпус 10 не наткнется на препятствие, а обойдет препятствие.
[123] Кроме того, когда контроллер 110 принимает информацию об обнаружении препятствий из датчиков 17a и 17c столкновения (см. фиг.3), расположенных в направлении вперед, то есть, датчиков столкновения, расположенных слева и справа относительно направления вперед, контроллер 110 может вычислять расстояния от основного корпуса 10 до препятствий. Таким образом, контроллер 110 сможет вычислять расстояния между препятствиями посредством триангуляции с использованием положений, в которых датчики столкновения установлены, и/или углов, под которыми датчики столкновения воспринимают препятствия. Соответственно, когда заранее запомненная полная ширина (в качестве примера, отметим, что она может быть наибольшей шириной) основного корпуса 10 больше, чем расстояние между препятствиями, контроллер 110 может визуально или звуковым сигналом предупредить пользователя различными средствами предупреждения о том, что основной корпус 10 не сможет пройти между препятствиями.
[124] Блок 20 всасывания может включать в себя множество кнопок (не показаны), которые расположены вокруг ручки 21 и конфигурация которых обеспечивает управление перемещением основного корпуса 10. Таким образом, блок 20 всасывания может передавать сигнал управления, соответствующий кнопке направления и вводимый пользователем в основной корпус 10 по проводам или без них. Получив этот сигнал управления, основной корпус 10 сможет переместиться вперед, назад, влево или вправо в соответствии с полученным сигналом.
[125] Если пользователь нажал кнопку направления и воплотил этим событие ввода, оказывается возможным остановку перемещения основного корпуса 10 в соответствии с вышеописанным режимом предотвращения затруднения продвижения или режимом обхода препятствия с последующим перемещением в любом направлении в соответствии с пользовательским вводом. Соответственно, когда основной корпус 10 натыкается на препятствие и т.п., пользователь может произвольным образом перемещать основной корпус 10, тем самым исключая это затруднение продвижения основного корпуса 10.
[126] Способ управления автономным подвижным устройством для очистки
[127] На фиг.7 представлена блок-схема последовательности операций, иллюстрирующая способ управления автономным подвижным устройством для очистки в соответствии с вариантом осуществления данного изобретения.
[128] Как показано на фиг.7, способ управления автономным подвижным устройством для очистки в соответствии с вариантом осуществления данного изобретения может включать в себя восприятие (S10) вращения движущего колеса и управление (S20) перемещением основного корпуса устройства для очистки, осуществляемое посредством блока привода, основываясь на указанном воспринимаемом вращении движущего колеса.
[129] Ниже будет приведено подробное описание элементов со ссылками на фиг.1-6B. Повторное описание действий над такими же элементами, как вышеописанные, приведено не будет, а подробное их описание будет опущено.
[130] Первый, датчик 120 колес может измерять (S10) вращение движущего колеса 13, а контроллер 110 может управлять (S20) перемещением основного корпуса 10 посредством блока 130 привода на основе указанного воспринимаемого вращения движущего колеса 13.
[131] Контроллер 110 может определять рабочее намерение пользователя (переместить вперед, переместить назад, или повернуть) на основе воспринимаемых датчиком 120 колес чисел оборотов или скоростей вращения правого и левого движущих колес 13, а также может управлять вращением правого и левого движущих колес 13 посредством блока 130 привода таким образом, что основной корпус 10 последует за ручкой или блоком 20 всасывания, включающего в себя ручку, в соответствии с результатом определения, и вследствие этого окажется возможным автономное перемещение основного корпуса 10 в соответствии с рабочим намерением пользователя.
[132] Чтобы определить рабочее намерение пользователя, контроллер 110 не ограничивается тем, перемещается ли основной корпус 10 перемещает (или осуществляет ли привод блок 130 привода), когда контроллер 110 воспринимает вращения левого и правого движущих колес посредством датчика 120 колес. Вместе с тем, в соответствии с вариантом осуществления, способ управления может дополнительно включать в себя остановку (S5) привода движущего колеса 13 перед восприятием (S10) вращения движущего колеса 13. То есть, в соответствии с вариантом осуществления, перед восприятием вращения движущего колеса 13 посредством датчика 120 колес, контроллер 110 может передавать сигнал остановки в блок 130 привода, чтобы остановить вращение движущего колеса 13, измерить число оборотов движущего колеса посредством датчика 120 колес и определить рабочие намерения пользователя на основе указанного воспринимаемого числа оборотов.
[133] В качестве альтернативы, в соответствии с другим вариантом осуществления, когда блок 130 привода осуществляет привод движущего колеса 13, контроллер 110 может определять рабочее намерение пользователя на основе разности между управляющим сигналом, подаваемым на двигатель привода, передаваемым в блок 130 привода, и числом оборотов или скоростью вращения движущего колеса, воспринимаемой датчиком 120 колес, и может управлять перемещением основного корпуса 10 в соответствии с этим определением.
[134] При восприятии (S10) вращения движущего колеса 13, датчик 120 колес может воспринимать и выдавать вращение первого движущего колеса 13a, расположенного слева, и вращение второго движущего колеса 13b, расположенного справа относительно направления вперед основного корпуса 10.
[135] Таким образом, при осуществлении управления (S20) перемещением основного корпуса, контроллер 110 может индивидуально управлять первым и вторым движущими колесами 13 посредством блока 130 привода на основе воспринимаемого датчиком 120 колес вращения (например, на основе направлений вращения или количественных параметров вращения) первого и второго движущих колес 13.
[136] В этом случае управления (S20) перемещением основного корпуса, контроллер 110 может обеспечивать осуществление привода первого и второго движущих колес 13 том же направлении, что и воспринимаемое датчиком 120 колес направление вращения первого и второго движущих колес 13.
[137] Кроме того, при осуществлении управления (S20) перемещением основного корпуса, контроллер 110 может обеспечивать осуществление привода первого движущего колеса 13a и второго движущего колеса 13b на основе воспринимаемых датчиком 120 колес количественных параметров вращения. Вместе с тем, контроллер 110 может управлять вращением движущих колес с использованием количественного параметра вращения, большего, чем количественный параметр вращения, воспринимаемый датчиком 120 колес. То есть, чтобы уменьшить силу, с которой пользователь тянет основной корпус 10 за ручку, можно перемещать основной корпус 10 на основе количественного параметра вращения, большего, чем воспринимаемый количественный параметр вращения.
[138] В этом случае, при осуществлении управления (S20) перемещением основного корпуса, контроллер 110 может обеспечивать осуществление привода первого и второго движущих колес 13 таким образом, что количественный параметр вращения, по которому осуществляют привод первого и второго движущих колес 13, не будет превышать заданный предел количественных параметров вращения.
[139] То есть, когда контроллер 110 обеспечивает осуществление привода движущего колеса 13 посредством блока 130 привода на основе воспринимаемого датчиком 120 колес количественного параметра вращения, контроллер 110 может управлять первым и вторым движущими колесами 13 таким образом, что число оборотов или скорость вращения не превысит заданный предел числа оборотов или заданный предел скорости вращения, соответственно, тем самым давая пользователю возможность предотвратить получение удара от основного корпуса 10 и предотвратить запутывание воздушного шланга из-за поворота основного корпуса.
[140] В данном случае, предел количественных параметров вращения можно установить как количественный параметр вращения первого движущего колеса 13a и/или второго движущегося колес 13b за один цикл, когда в качестве одного цикла рассматривается ряд процессов, в ходе которых датчик 120 колес воспринимает количественный параметр вращения движущего колеса 13, а блок 130 привода осуществляет привод движущего колеса в соответствии с воспринимаемым количественным параметром вращения.
[141] Когда контроллер 110 управляет перемещением основного корпуса 10 таким образом, что основной корпус 10 следует за блоком 20 всасывания, контроллер 110 может управлять блоком 130 привода таким образом, что расстояние между блоком 20 всасывания, включающим в себя ручку, захватываемую пользователем, и основным корпусом 10 поддерживается на уровне некоторого заданного расстояния (или некоторого определенного диапазона расстояния) на основе воспринимаемых датчиком 120 колес чисел оборотов или скоростей вращения правого и левого движущих колес 13,.
[142] В данном случае, пользователь может установить или ввести заданное расстояние заранее. Заданное расстояние можно установить с определенным соотношением, основанным на длине воздушного шланга 30. В качестве примера, отметим, что, когда длина воздушного шланга принимается от пользователя, контроллер 110 может установить в качестве заданного расстояния некоторое значение, вычисляемое путем применения определенного соотношения, соответствующего принимаемой длине воздушного шланга.
[143] Автономное подвижное устройство для очистки в соответствии с вариантом осуществления данного изобретения может определять, ограничено ли перемещение основного корпуса 10, и может обеспечивать осуществление обходного поворота, устраняя с дороги элемент, приводящий к ограничению перемещения, в соответствии с результатом определения и обеспечивая таким образом основному корпусу 10 возможность непрерывно следовать за блоком 20 всасывания.
[144] В соответствии с вариантом осуществления, контроллер 110 может определять, что основной корпус 10 испытывает затруднение продвижения, когда разность между количественными параметрами вращения движущих колес, воспринимаемыми датчиком 120 колес, больше заданного значения или равна ему, или направления вращения движущих колес отличаются друг от друга.
[145] Соответственно, управление (S20) перемещением основного корпуса может дополнительно включать в себя определение того, испытывает ли основной корпус 10 затруднение продвижения.
[146] В данном случае, при определении (S11) того, испытывает ли основной корпус 10 затруднение продвижения, контроллер 110 может определять что основной корпус 10 испытывает затруднение продвижения, когда разность между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса, воспринимаемыми датчиком 120 колес, больше заданного значения или равна ему.
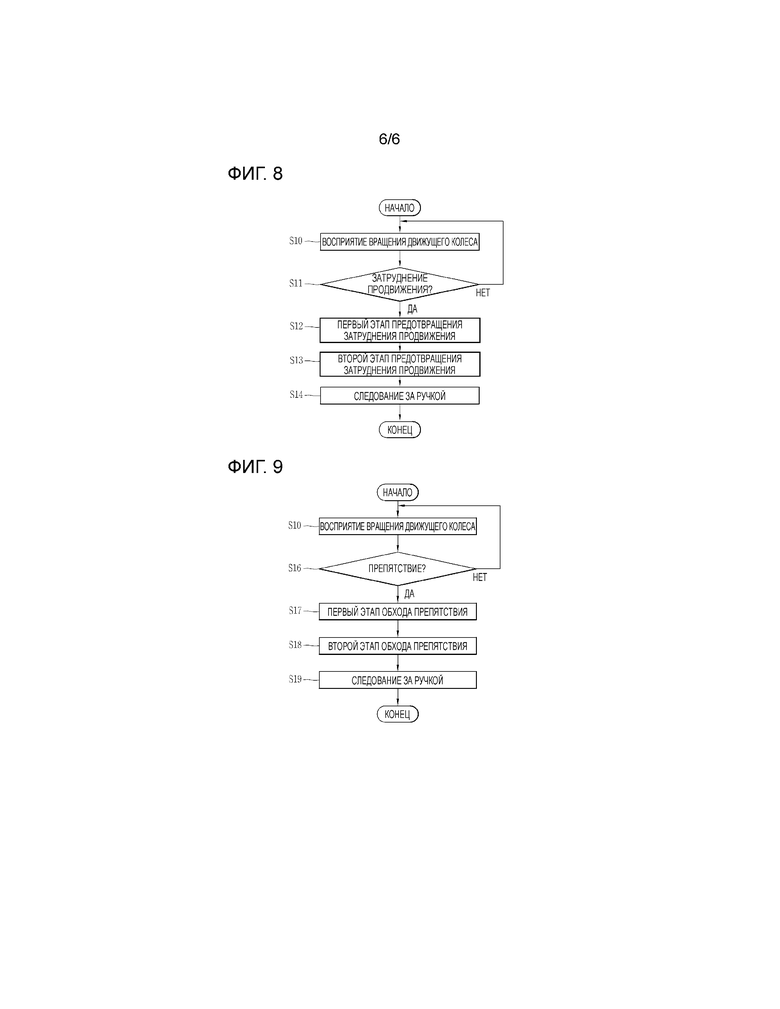
[147] После этого, когда определяют, что основной корпус 10 испытывает затруднение продвижения, управление (S20) перемещением основного корпуса может дополнительно включать в себя первый этап (S12) предотвращения затруднения продвижения, на котором контроллер 110 обеспечивает осуществление привода только одного из первого и второго движущих колес, которое имеет меньший количественный параметр вращения, или осуществление привода первого и второго движущих колес 13 таким образом, что указанное одно движущее колесо будет иметь больший количественный показатель вращения, чем другое движущее колесо, и второй этап (S13) предотвращения затруднения продвижения, на котором контроллер 110 обеспечивает осуществление привода первого и второго движущих колес 13 по заданному количественному параметру в одном и том же направлении вращения до и/или после первого этапа (S12) предотвращения затруднения продвижения. То есть, на фиг.8 показано, что второй этап (S13) предотвращения затруднения продвижения наступает после первого этапа (S12) предотвращения затруднения продвижения. Вместе с тем, первый этап (S12) предотвращения затруднения продвижения может быть проведен после второго этапа (S13) предотвращения затруднения продвижения. Перед поворотом основного корпуса 10 для перемещения на первом этапе (S12) предотвращения затруднения продвижения, сначала можно переместить основной корпус 10 назад на заданное расстояние на втором этапе (S13) предотвращения затруднения продвижения таким образом, что можно будет легко повернуть основной корпус 10 для перемещения на следующем этапе, которым станет первый этап (S12) предотвращения затруднения продвижения.
[148] С другой стороны, при определении (S11) того, испытывает ли основной корпус 10 затруднение продвижения, контроллер 110 может определять, что основной корпус 10 испытывает затруднение продвижения, когда направление вращения первого движущего колеса и направление вращения второго движущего колеса отличаются друг от друга.
[149] После этого, когда определено что основной корпус 10 испытывает затруднение продвижения, способ управления может дополнительно включать в себя первый этап (S12) предотвращения затруднения продвижения, на котором контроллер 110 обеспечивает осуществление привода первого и второго движущих колес 13 в направлениях, противоположных направлениям вращения первого и второго движущих колес 13, воспринимаемым датчиком 120 колес, и второй этап (S13) предотвращения затруднения продвижения, на котором контроллер 110 обеспечивает осуществление привода первого и второго движущих колес 13 по заданному количественному параметру в одном и том же направлении вращения до и/или после первого этапа(S12) предотвращения затруднения продвижения.
[150] После этого, способ управления может дополнительно включать в себя осуществление привода первого и второго движущих колес 13 таким образом, что основной корпус 10 последует за блоком 20 всасывания, на основе вращения первого движущего колеса и вращения второго движущего колеса, воспринимаемых датчиком 120 колес.
[151] Подробное описание этого является таким же, как приведенное со ссылками на фиг.5A-5C, и поэтому оно будет опущено.
[152] Автономное подвижное устройство для очистки в соответствии с вариантом осуществления данного изобретения может дополнительно включать в себя датчик 17 столкновения. Таким образом, управление (S20) перемещением основного корпуса может включать в себя восприятие (S16) положения препятствия спереди датчиком столкновения, который воспринимает препятствие.
[153] Когда воспринимают положение препятствия, управление (S20) перемещением основного корпуса может включать в себя этапы (S17, S18) обхода препятствия, на которых контроллер 110 обеспечивает осуществление привода первого и второго движущих колес 13 в соответствии с режимом обхода препятствия, который задают, чтобы обойти препятствие на основе воспринимаемого положения препятствия.
[154] Этапы обхода препятствия могут включать в себя первый этап (S17) обхода препятствия, на котором, чтобы переместить основной корпус 10 в направлении, противоположном положению препятствия, контроллер 110 обеспечивает осуществление привода только одного из первого и второго движущих колес 13, которое ближе к препятствию, воспринимаемому датчиком 17 столкновения, осуществление привода первого и второго движущих колес 13 таким образом, что указанное одно движущее колесо будет иметь больший количественный параметр вращения, чем другое движущее колесо, или осуществление привода первого и второго движущих колес 13 в противоположных направлениях, и второй этап (S18) обхода препятствия на котором контроллер 110 обеспечивает осуществление привода первого и второго движущих колес 13 по заданному количественному параметру в одном и том же направлении вращения до или после первого этапа (S17) обхода препятствия.
[155] То есть, на фиг.9 показано, что второй этап (S18) обхода препятствия (S18) наступает после первого этапа (S17) обхода препятствия. Вместе с тем, первый этап (S17) обхода препятствия можно проводить после второго этапа (S18) обхода препятствия. Перед поворотом основного корпуса 10 для перемещения на первом этапе (S17) обхода препятствия, сначала можно переместить основной корпус 10 назад на заданное расстояние на втором этапе (S18) обхода препятствия, так что можно будет легко повернуть основной корпус 10 для перемещения на следующем этапе, которым станет первый этап (S17) обхода препятствия.
[156] После этого, управление (S20) перемещением основного корпуса может включать в себя осуществление привода первого и второго движущих колес 13 таким образом, что основой корпус 10 последует за блоком 20 всасывания, на основе вращения первого движущего колеса и вращения второго движущего колеса, воспринимаемых датчиком 120 колес.
[157] Подробное описание этого является таким же, как приведенное со ссылками на фиг.6A и 6В, и поэтому оно будет опущено.
[158] Способ управления автономным подвижным устройством для очистки в соответствии с вариантом осуществления данного изобретения может включать в себя этапы: когда контроллер 110 принимает информацию об обнаружении препятствия из множества датчиков 17 столкновения, вычисления расстояния от основного корпуса 10 до множества препятствий и управление движущими колесами 13 таким образом, что произойдет предпочтительное перемещение основного корпуса 10 в обход ближайшего препятствия в соответствии с режимом обхода препятствия, и это будет основываться на информации, касающейся множества расстояний. После этого, повторяя обнаружение препятствий и режим обхода препятствия, контроллер 110 сможет обеспечить перемещение основного корпуса 10 таким образом, что основной корпус 10 не наткнется на препятствие, а обойдет это препятствие.
[159] Способ управления автономным подвижным устройством для очистки в соответствии с вариантом осуществления данного изобретения может дополнительно включать в себя этапы: когда контроллер 110 принимает информацию об обнаружении препятствия из датчиков 17a и 17c столкновения (см. фиг.3), расположенных в направлении вперед, то есть, датчиков столкновения, расположенных слева и справа относительно направления вперед, вычисления расстояния от основного корпуса 10 до препятствий посредством триангуляции с использованием положений, в которых установлены датчики столкновения, и/или углов, под которыми датчики столкновения воспринимают препятствия, а когда заранее запомненная полная ширина (в качестве примера, отметим, что она может быть наибольшей шириной) основного корпуса 10 больше, чем расстояние между препятствиями, контроллер 110 может визуально или звуковым сигналом предупредить пользователя различными средствами предупреждения о том, что основной корпус 10 не сможет пройти между препятствиями.
[160] В соответствии с автономным подвижным устройством для очистки и способом управления им в соответствии с вариантом осуществления данного изобретения, можно предотвратить блокировку ультразвукового сигнала препятствием или предотвратить неправильное срабатывание из-за ультразвукового сигнала, отражаемого окружающими предметами, потому что ультразвуковые волны не используются, когда основной корпус устройства для очистки перемещают так, что он следует за блоком всасывания.
[161] В соответствии с автономным подвижным устройством для очистки и способом управления им в соответствии с вариантом осуществления данного изобретения, также появляется возможность минимизировать силу притяжения, прикладываемую пользователем к основному корпусу, и устранить вероятность того, что пользователь получит удар основным корпусом, поддерживая заданное расстояние между основным корпусом и блоком всасывания, и снизить вероятность повреждения воздушного шланга внешней силой, минимизируя силу растяжения, прикладываемую к воздушному шлангу.
[162] Различные варианты осуществления можно воплотить посредством машиночитаемого носителя, имеющего хранимые на нем команды для исполнения их процессором с целью осуществления различных способов, представленных в данном описании. Примеры возможных машиночитаемых носителей включают в себя накопитель на жестких дисках (НЖД), твердотельный диск (ТТД), дисковод на кремниевых дисках (ДКД), постоянное запоминающее устройство (ПЗУ), оперативное запоминающее устройство (ОЗУ), ПЗУ на компакт-диске (CD-ROM), магнитную ленту, дискету, оптическое устройство для хранения данных, носители информации других типов, представленные в данном описании, и их комбинации. Если это желательно, можно реализовать машиночитаемый носитель в форме несущей волны (например - передачи через сеть Internet).
[163] В соответствии с автономным подвижным устройством для очистки и способом управления им в соответствии с вариантом осуществления данного изобретения, можно воспринимать и обходить препятствие, когда основной корпус устройства для очистки располагается в том месте, где перемещению устройства для очистки может помешать препятствие.
[164] Поскольку данное изобретение может быть осуществлено в нескольких формах в рамках его отличительных признаков, следует также понять, что вышеописанные варианты осуществления не ограничиваются никакими подробностями вышеизложенного описания, если явно не указано иное, а его скорее следует толковать в широком смысле в рамках объема его притязаний, определенных в прилагаемой формуле изобретения, и поэтому все изменения и модификации, находящиеся в рамках границ и пределов формулы изобретения или эквивалентов таких границ и пределов, полагаются охватываемыми прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОНОМНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ПОВЕРХНОСТИ | 2012 |
|
RU2601931C2 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2703100C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710453C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710413C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2699837C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2701999C1 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710508C1 |
| АВТОНОМНЫЙ ПЫЛЕСОС | 2012 |
|
RU2586197C2 |
| РОБОТ-ПЫЛЕСОС | 2017 |
|
RU2710412C1 |
| ЭЛЕКТРИЧЕСКИЙ ПЫЛЕСОС | 2012 |
|
RU2562043C2 |
Предложено автономное подвижное устройство для очистки, включающее в себя основной корпус, блок всасывания, который имеет ручку и конфигурация которого обеспечивает всасывание окружающего инородного материала, воздушный шланг, конфигурация которого обеспечивает соединение основного корпуса и блока всасывания и направление инородного материала в основной корпус, по меньшей мере одно движущее колесо, установленное под основным корпусом, блок привода, конфигурация которого обеспечивает осуществление привода движущего колеса посредством работы электродвигателя привода, датчик колес, конфигурация которого обеспечивает восприятие вращения движущего колеса, и контроллер, конфигурация которого обеспечивает управление перемещением основного корпуса посредством блока привода на основе воспринимаемого датчиком колес вращения движущего колеса 2 н. и 15 з.п. ф-лы, 9 ил..
1. Автономное подвижное устройство для очистки, содержащее:
основной корпус;
блок всасывания, который имеет ручку и конфигурация которого обеспечивает поддержание заданного расстояния от основного корпуса и всасывание окружающего инородного материала;
воздушный шланг, конфигурация которого обеспечивает соединение основного корпуса и блока всасывания и направление инородного материала в основной корпус;
первое движущее колесо, установленное слева от направления движения основного корпуса, и второе движущее колесо, установленное справа под основным корпусом;
блок привода, конфигурация которого обеспечивает осуществление привода первого и второго движущих колес посредством работы приводного электродвигателя;
датчик колес, который соединен с первым движущим колесом и вторым движущим колесом и конфигурация которого обеспечивает восприятие вращения первого движущего колеса и второго движущего колеса; и
контроллер, конфигурация которого обеспечивает управление перемещением основного корпуса посредством блока привода на основе вращения движущих колес, воспринимаемого датчиком колес;
при этом, когда разность между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса, которые воспринимаются датчиком колес, больше, чем некоторое заданное значение, или равно ему или когда направление вращения первого движущего колеса и направление вращения второго движущего колеса отличаются друг от друга, контроллер обеспечивает осуществление привода первого движущего колеса и второго движущего колеса в заданном режиме предотвращения затруднения продвижения.
2. Автономное подвижное устройство для очистки по п.1, в котором контроллер управляет перемещением основного корпуса на основе вращения движущих колес, воспринимаемого датчиком колес, когда блок привода не осуществляет привод движущих колес.
3. Автономное подвижное устройство для очистки по п.1, в котором контроллер обеспечивает осуществление привода первого движущего колеса и второго движущего колеса в том же направлении, что и воспринимаемые датчиком колес направления вращения первого движущего колеса и второго движущего колеса.
4. Автономное подвижное устройство для очистки по п.1, в котором контроллер обеспечивает осуществление привода первого движущего колеса и второго движущего колеса в соответствии с количественными параметрами вращения первого движущего колеса и второго движущего колеса, воспринимаемыми датчиком колес.
5. Автономное подвижное устройство для очистки по п.4, в котором количественные параметры вращения, по которым осуществляется привод первого движущего колеса и второго движущего колеса, больше, чем количественные параметры вращения первого движущего колеса и второго движущего колеса, воспринимаемые датчиком колес.
6. Автономное подвижное устройство для очистки по п.4, в котором контроллер обеспечивает осуществление привода первого движущего колеса и второго движущего колеса таким образом, что количественные параметры вращения, по которым осуществляется привод первого движущего колеса и второго движущего колеса, не превышают заданный предел количественных параметров вращения.
7. Автономное подвижное устройство для очистки по п.1, в котором контроллер обеспечивает осуществление привода первого движущего колеса и второго движущего колеса таким образом, что основной корпус следует за блоком всасывания, на основе вращения первого движущего колеса и вращения второго движущего колеса, которые воспринимаются датчиком колес.
8. Автономное подвижное устройство для очистки по п.1, в котором
режим предотвращения затруднения продвижения включает в себя первый режим предотвращения затруднения продвижения, а
когда разность между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса больше, чем заданное значение, или равна ему, контроллер обеспечивает осуществление привода только одного из первого движущего колеса и второго движущего колеса, которое имеет меньший количественный параметр вращения, или обеспечивает осуществление привода первого движущего колеса и второго движущего колеса таким образом, что указанное одно движущее колесо имеет больший количественный параметр вращения, чем другое движущее колесо, в соответствии с первым режимом предотвращения.
9. Автономное подвижное устройство для очистки по п.8, в котором, когда направление вращения первого движущего колеса и направление вращения второго движущего колеса отличаются друг от друга, контроллер обеспечивает осуществление привода первого движущего колеса и второго движущего колеса в направлениях, противоположных воспринимаемым датчиком колес направлениям вращения первого движущего колеса и второго движущего колеса.
10. Автономное подвижное устройство для очистки по п.9, в котором
режим предотвращения затруднения продвижения дополнительно включает в себя второй режим предотвращения затруднения продвижения, а
контроллер обеспечивает осуществление привода первого движущего колеса и второго движущего колеса по заданному количественному параметру вращения в одном и том же направлении вращения в соответствии со вторым режимом предотвращения затруднения продвижения до или после первого режима предотвращения затруднения продвижения.
11. Автономное подвижное устройство для очистки по п.1, дополнительно содержащее датчик столкновения, который предусмотрен в основном корпусе и конфигурация которого обеспечивает восприятие препятствия спереди,
при этом контроллер обеспечивает осуществление привода первого и второго движущих колес в соответствии с заданным режимом обхода препятствия для обхода препятствия, на основе положения препятствия, воспринимаемого датчиком столкновения, и обеспечивает осуществление привода первого и второго движущих колес таким образом, что основной корпус следует за блоком всасывания, на основе вращения первого движущего колеса и вращения второго движущего колеса, которые воспринимаются датчиком колес.
12. Автономное подвижное устройство для очистки по п.11, в котором режим обхода препятствия включает в себя первый режим обхода препятствия.
13. Автономное подвижное устройство для очистки по п.12, в котором для поворота основного корпуса с целью перемещения в направлении, противоположном положению препятствия, в соответствии с первым режимом обхода препятствия контроллер обеспечивает осуществление привода только одного из первого движущего колеса и второго движущего колеса, которое находится ближе к препятствию, воспринимаемому датчиком столкновения, обеспечивает осуществление привода первого и второго движущих колес таким образом, что указанное одно движущее колесо имеет больший количественный параметр вращения, чем другое движущее колесо, или обеспечивает осуществление привода первого и второго движущих колес в противоположных направлениях.
14. Автономное подвижное устройство для очистки по п.13, в котором
режим обхода препятствия дополнительно включает в себя второй режим обхода препятствия, а
контроллер обеспечивает осуществление привода первого движущего колеса и второго движущего колеса по заданному количественному параметру вращения в одном и том же направлении вращения в соответствии со вторым режимом предотвращения затруднения продвижения до или после первого режима предотвращения затруднения продвижения.
15. Способ управления автономным подвижным устройством для очистки, включающим в себя основной корпус, блок всасывания, конфигурация которого обеспечивает поддержание заданного расстояния от основного корпуса и всасывание окружающего инородного материала, воздушный шланг, конфигурация которого обеспечивает соединение основного корпуса и блока всасывания и направление инородного материала в основной корпус, первое движущее колесо, установленное слева относительно направления движения основного корпуса, и второе движущее колесо, установленное справа, под основным корпусом, и блок привода, конфигурация которого обеспечивает осуществление привода первого и второго движущих колес таким образом, что основной корпус следует за блоком всасывания, и датчик колес, соединенный с первым движущим колесом и вторым движущим колесом, при этом способ управления включает в себя этапы, на которых:
воспринимают вращение первого движущего колеса и второго движущего колеса;
вычисляют разность между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса, которые воспринимаются датчиком колес; и
управляют перемещением основного корпуса посредством блока привода на основе разности между количественным параметром вращения первого движущего колеса и количественным параметром вращения второго движущего колеса.
16. Способ управления по п.15, дополнительно включающий в себя этап, на котором обеспечивают остановку привода движущих колес до выполнения восприятия вращения движущих колес.
17. Способ управления по п.15, в котором
восприятие вращения движущих колес включает в себя этап, на котором воспринимают вращение первого движущего колеса и второго движущего колеса, и
восприятие вращения движущих колес включает в себя этап, на котором обеспечивают осуществление индивидуального привода первого движущего колеса и второго движущего колеса в таком же направлении, как воспринимаемые направления вращения первого движущего колеса и второго движущего колеса.
| US 20130212829 A1, 22.08.2013 | |||
| US 20130025085 A1, 31.01.2018 | |||
| US 20140288709 A1, 25.09.2018. |

