Изобретение относится к способу передачи информации по проводным линиям. Настоящая заявка описывает магистральный последовательный интерфейс, а именно организацию обмена информацией между электронными устройствами, характеристики канала передачи данных и устройств интерфейса.
Заявляемый интерфейс может быть использован в промышленном контроллере с программируемой логикой (ПЛК) (далее контроллере), являющемся вычислительной и управляющей единицей в распределенных автоматизированных системах управления технологическими процессами (АСУ ТП). В частности, описанный в заявке интерфейс поддерживается в СФ - блоке, посредством которого осуществляется обмен данными, и который является частью систем на кристалле (СнК) "Friendship" и "Hornet", разрабатываемых для применения, в том числе, и в контроллерах.
Одной из проблем разработчиков контроллера является обеспечение высокоскоростной и достоверной информационной связи между модулем центрального процессора и модулями ввода-вывода контроллера, предназначенными для ввода в контроллер сигналов с датчиков и для вывода сигналов управления исполнительным устройствам. Решению этой проблемы и посвящено предлагаемое изобретение.
При описании заявляемого способа и аналогов используемые термины имеющее следующее значение:
«Протокол обмена данными» или «протокол передачи данных» - набор правил и соглашений, определяющих содержимое, формат, параметры времени, последовательность и проверку ошибок в сообщениях, которыми обмениваются устройства (абоненты) системы.
«Ведущее устройство (Master)» - главное устройство, которое посылает данные другим устройствам и/или запрашивает данные от других устройств, т.е. является инициатором в обмене данными с ведомым устройством (Slave).
«Ведомое устройство (Slave)» - устройство, которое может обмениваться информацией только с ведущим устройством (Master) после того, как от ведущего устройства поступит соответствующий запрос.
«Абонент» - электронное устройство, подключенное к линии связи для выдачи или приема данных.
«Общая шина» или «магистраль» - тип линии связи, при котором все абоненты подсоединены к общей линии связи. Общая линия связи используется всеми абонентами по очереди. Все сообщения, посылаемые отдельными абонентами, прослушиваются всеми остальными абонентами, подключенными к линии связи, но из потока сообщений абонент отбирает только адресованные ему сообщения.
«Канал передачи данных» - дифференциальная пара проводов или дифференциальная пара проводников на печатной плате, по которой осуществляют передачу информации в виде электрических сигналов от отправителя к получателю.
«Слово» - строка битов, рассматриваемая как единое целое при их передаче, приеме, коммутации, обработке, отображении и хранении.
«Управляющий пакет» - блок данных, обрабатываемый сетевыми программами как единое целое. Пакет состоит из данных, выполняющих роль служебной информации, необходимых для реализации протокола.
«Информационный пакет» - блок данных, обрабатываемый сетевыми программами, как единое целое. Пакет состоит из служебной информации и полезной информации, которая должна быть передана.
Общая структура управляющего или информационного пакета определяется составом пакета и его форматом.
«Состав» - содержащиеся в пакете различные типы данных.
«Формат» - размерность и порядок размещения различных типов данных.
В настоящее время в контроллерах применяются следующие последовательные интерфейсы с организации внутренней шины MultiPoint - многоточечное подключение электронных устройств: CAN, FlexRay, Profibus.
Поскольку "новый" интерфейс изначально разрабатывался для контроллера, для работы которого характерна цикличность, обязательный опрос в цикле всех модулей ввода-вывода, гарантированное время реакции (расчет требуемого времени реакции в разделе «Подробное описание изобретения») и высокий уровень достоверности передаваемой информации, то ни один из "известных" интерфейсов в полной мере не обеспечивает все исходные требования.
За основу для заявляемого способа передачи данных взят интерфейс, описанный в стандарте MIL-STD-1553В, dated 21 September 1978, «Department of defense interface standart for digital time division command/response multiplex data bus» (обозначение стандарта министерства обороны США для интерфейса цифровой шины данных с временным разделением команда/ответ). В нашей стране он был утвержден как ГОСТ 26765.52-87 «Интерфейс магистральный последовательный системы электронных модулей. Общие требования», который впоследствии был заменен на ГОСТ Р 52070-2003. Данный стандарт описывает магистральный последовательный интерфейс с централизованным управлением, применяемый в системе электронных устройств, и устанавливает требования к организации обмена информацией, функциям устройств интерфейса и контролю передачи информации, характеристикам информационной магистрали и характеристикам устройств интерфейса. Интерфейс функционирует асинхронно, в режиме «команда-ответ». Стандартом определен состав слов - командное слово, слово данных и ответное слово. Размер каждого слова равен 20 разрядам. Слова начинаются с синхросигнала (три разряда), затем поле данных (16 бит) и заканчиваются разрядом контроля по четности. Определены два вида синхросигнала, которые позволяют отличать командное слово и ответное слово от слова данных. Вся информация на магистрали передается в коде «Манчестер-2». Интерфейс, описанный в стандарте MIL-STD-1553В, имеет следующие недостатки. Так, определена низкая скорость передачи информации в канале - 1 Мбит/с. Максимальный размер сообщения, которое может быть передано или принято не более 32 слов данных. При этом не обеспечен полный контроль достоверности передаваемой информации. Адресуемых абонентов не более 31.
Проведенный патентный поиск показал, что метод обмена данными по протоколу, описанному в стандарте MIL-STD-1553В, который изначально разрабатывался для бортового электронного оборудования самолетов, широко используется и в наши дни. Принципы организации этого стандарта принимались за основу при разработке новых последовательных интерфейсов. К интерфейсам на основе стандарта MIL-STD-1553В с магистральным способом соединения электронных устройств системы относятся: STANAG 3910, MIL-STD-1760D, MIL-STD-1773, FC-AE-1553, Space shuttle MIA bus. Однако данные интерфейсы также разрабатывались для бортового оборудования самолетов или спутников и, следовательно, к ним предъявлялись совсем другие требования, чем в области промышленной автоматизации. Так, например, в перечисленных интерфейсах данные передаются на большие расстояния, поэтому для их передачи используют оптико-волоконную среду.
В качестве наиболее близкого аналога к предлагаемому способу передачи данных в промышленном контроллере предлагается принять описанный в US 7,243,173 В2 (патентообладатель Rockwell Automation Technologies, US) способ передачи данных. Известный способ передачи данных предназначен для использования в области автоматизации производства. Основной целью известного изобретения является обеспечить высокоскоростную передачу данных между модулем центрального процессора и периферийными устройствами, а именно обеспечить скорость передачи данных не менее 800 Мбод на расстояниях от трех до сорока дюймов. Для этого предложена сложная организация линии связи с использованием различных устройств и методов, каждый из которых направлен на увеличение скорости передачи данных. Так, предложено использовать как параллельный, так и последовательный интерфейсы. Предложено информацию, передаваемую по параллельным шинам от отправляющей стороны, преобразовывать в последовательные данные и повторно конвертировать информацию в исходную форму параллельных данных на принимающей стороне. Для этого на отправляющей и принимающей сторонах используют схемы последовательно-параллельного преобразования, преобразующие параллельные сигналы в последовательные и наоборот. Для последовательной передачи данных используют LVDS-технологию передачи данных дифференциальными сигналами с малым напряжением (стандарт TIA/EIA-644-A, Electrical Characteristics of Low Voltage Differential Signaling (LVDS) Interface Circuits / Note: Revision of TIA/EIA-644). Стандарт определяет характеристики приборов, предназначенных для поддержки связи между одним передатчиком и одним приемником (point-to-point) или одним передатчиком и несколькими приемниками (multidrop). В известном способе между схемами преобразования используют полудуплексную передачу данных. Для этого между схемами преобразования используют два входных и два выходных последовательных канала передачи данных или для еще более быстрой передачи данных используют четыре входных и четыре выходных последовательных канала передачи данных. Преобразование сигналов и внесение схемотехнических изменений в линию связи потребовало внесение изменений в состав и формат типа данных. В состав данных адреса внесены два бита, сигнализирующих, когда новая транзакция запущена или завершена. Перечисленные выше изменения, направленные на увеличение скорости передачи данных между центральным и периферийным устройством, нашли отражение в пунктах формулы известного изобретения.
Цель изобретения - обеспечить передачу данных по внутренней шине программируемого логического контроллера с заданной скоростью, а также гарантировать определенный уровень достоверности переданной информации.
Технический результат достигается тем, что способ передачи данных в промышленном контроллере заключается в том, что между по меньшей мере одним ведущим электронным устройством и по меньшей мере двумя ведомыми электронными устройствами осуществляют пословный обмен данными, при котором осуществляют запись данных из ведущего устройства в ведомое устройство или чтение данных ведущим устройством из ведомого. Между электронными устройствами, соединение между которыми имеет тип "общая шина", осуществляют полудуплексную последовательную передачу данных со скоростью передачи данных по одному общему каналу в диапазоне 24-55 Мбит/с, для чего используют многоточечную технологию низковольтной дифференциальной передачи сигналов M-LVDS с подключенными к каналу приемопередатчиками ведущего и ведомых электронных устройств. Передачу данных между ведущим электронным устройством и ведомым электронным устройством осуществляют в виде управляющего пакета или информационного пакета, состоящего из управляющего пакета и пакета данных. Управляющий пакет и пакет данных состоят из двадцатибитных слов, каждое из которых начинается трехбитным синхросигналом, имеет шестнадцать информационных бит и завершается битом контроля по четности. Пакет данных состоит из одного или более слов полезной информации и слова контрольной суммы слов полезной информации. Управляющий пакет состоит из трех слов, в состав двух из которых входят адрес абонента, номер внутреннего адресного пространства запрашиваемого абонента, бит инициатора текущей передачи в канале, бит операции запись/чтение, бит адаптивного чтения полезной информации, бит подтверждения достоверности принятого информационного пакета, код количества слов в пакете данных, а третье слово определяет контрольную сумму двух других слов управляющего пакета. При чтении значения контролируемого параметра бит адаптивного чтения полезной информации имеет разное значение в управляющем пакете и в информационном пакете в тогда, когда в направленном ведущим электронным устройством в ведомое электронное устройство управляющем пакете запрашивают максимально возможное количество слов полезной информации, необходимое для записи значения контролируемого параметра, а затем ведомое устройство отправляет в ведущее устройство информационный пакет с меньшим количеством слов полезной информации, чем запрашивалось, и достаточным для записи текущего значения контролируемого параметра.
Краткое описание чертежей:
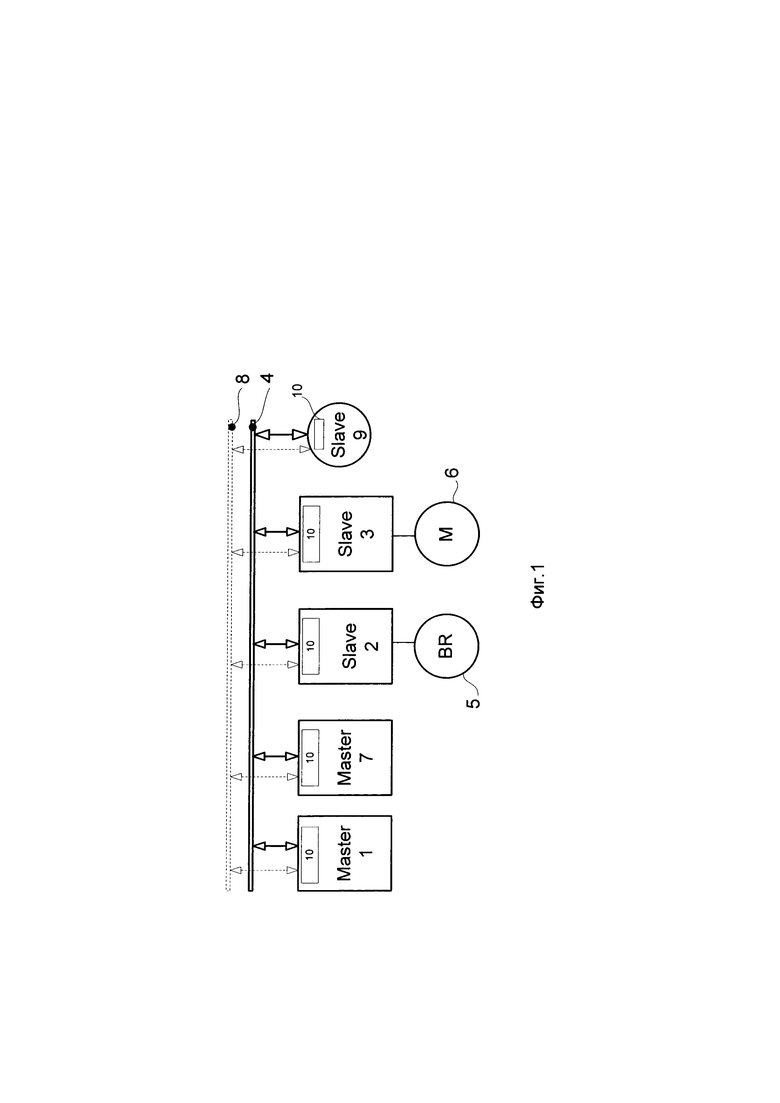
фиг. 1 - структурная схема соединения "общая шина" электронных устройств, реализующих заявляемый способ обмена данными;
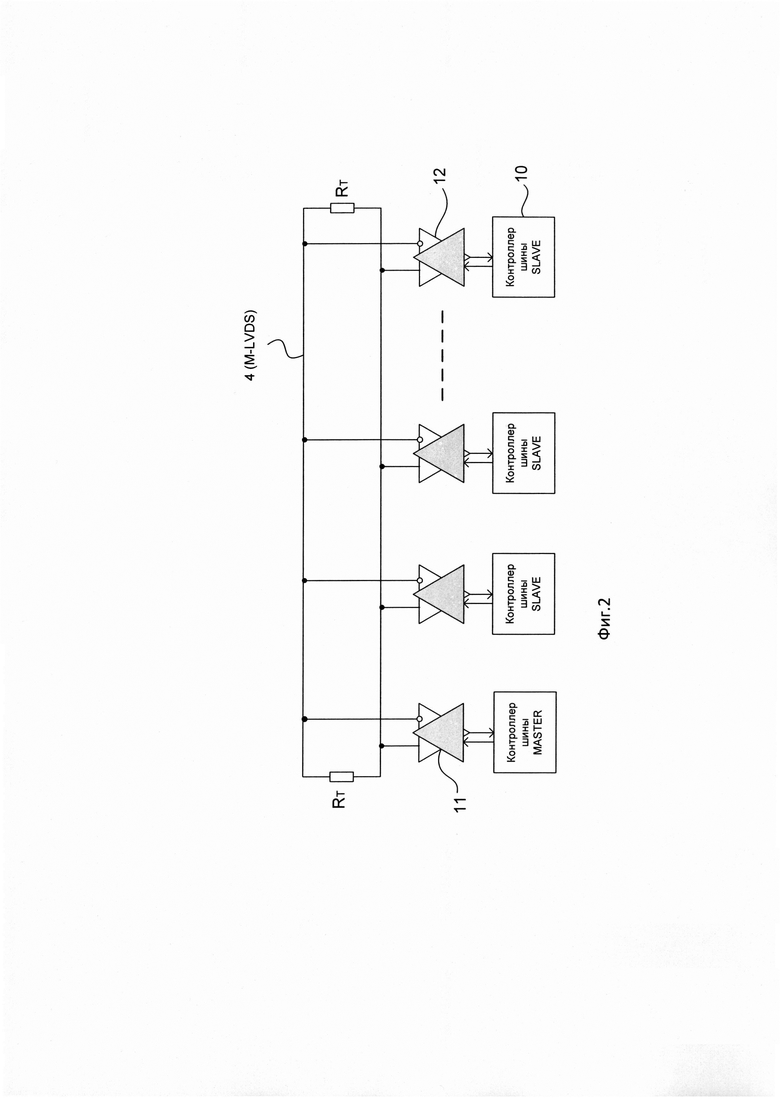
фиг. 2 - структурная схема интерфейса M-LVDS с топологией линии связи многоточка (MultiPoint);
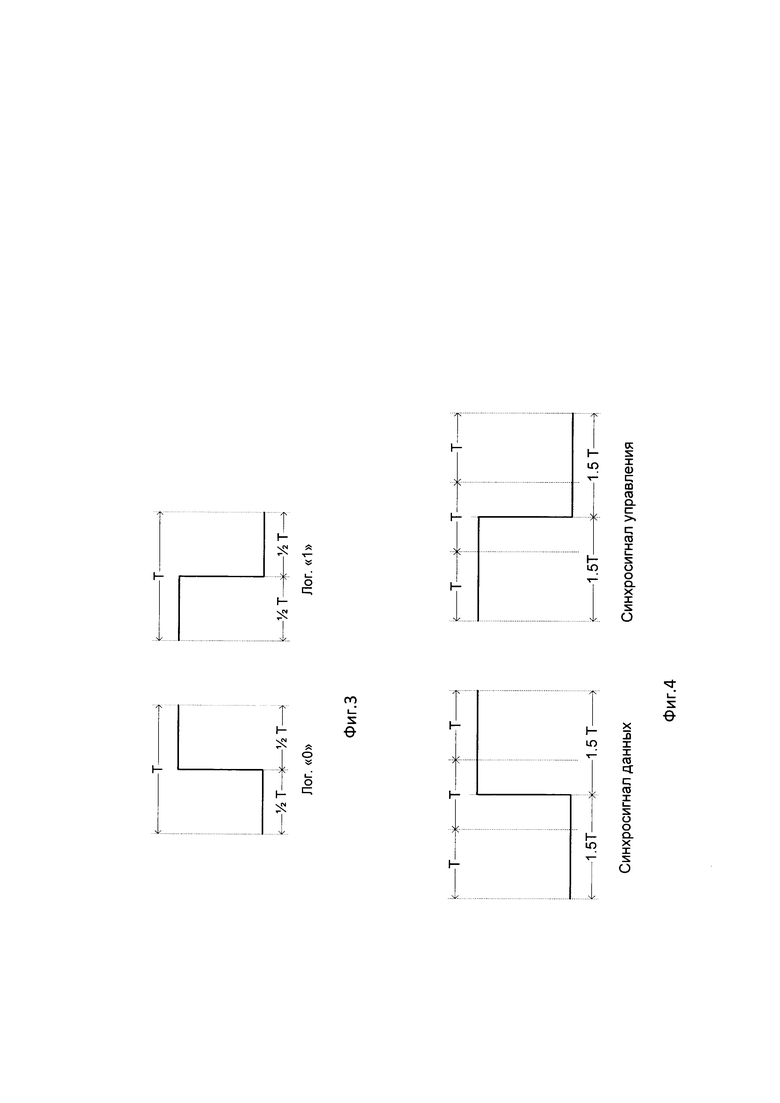
фиг. 3 - передача логических нуля и единицы в коде «Манчестер-2»;
фиг. 4 - синхросигналы управляющего слова и слова данных;
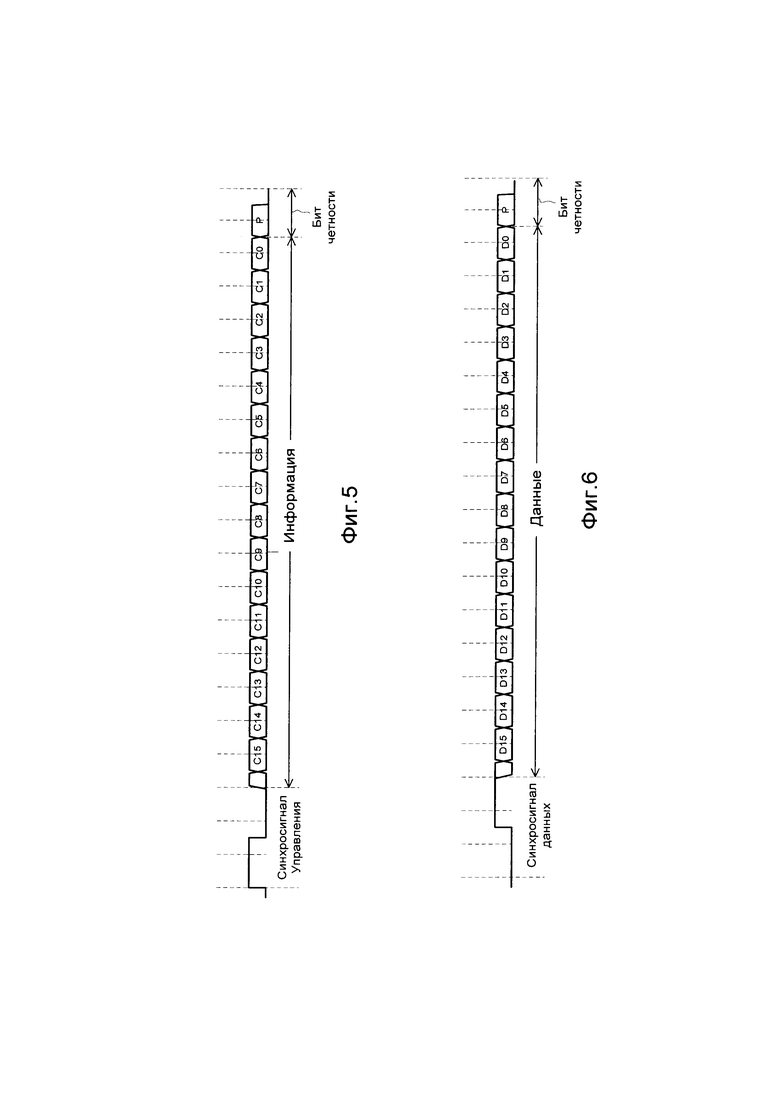
фиг. 5 - физический формат управляющего слова;
фиг. 6 - физический формат слова данных;
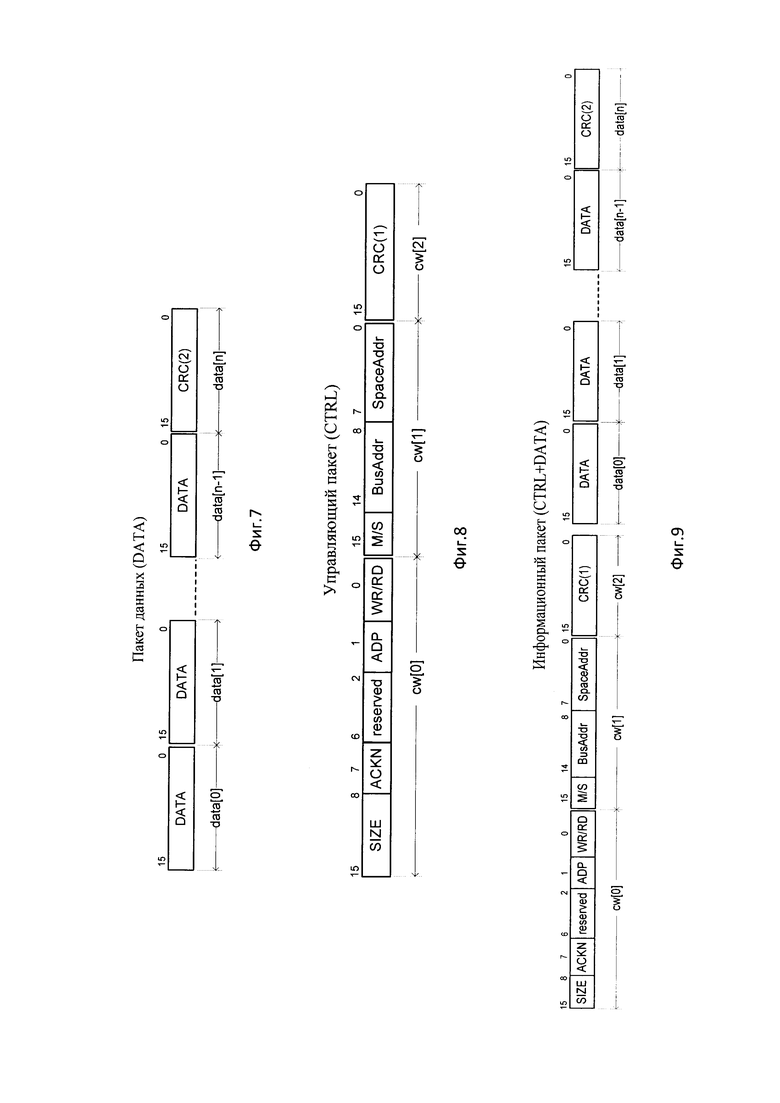
фиг. 7 - структура пакета данных (DATA);
фиг. 8 - структура управляющего пакета (CTRL);
фиг. 9 - структура информационного пакета (CTRL + DATA);
фиг. 10 - структура сообщения «записи данных в устройство (Slave)»;
фиг. 11 - структура сообщения «широковещательное сообщение»;
фиг. 12 - структура сообщения «чтение данных из устройства (Slave)»;
фиг. 13 - сообщение «чтение данных из устройства (Slave)», в котором при измерении текущего значения параметра из устройства (Slave) передается в устройство (Master) максимально возможное количество слов данных, необходимых для записи контролируемого параметра (режим полного чтения из Slave);
фиг. 14 - сообщение «чтение данных из устройства (Slave)», в котором из устройства (Slave) передается в устройство (Master) количество слов данных, достаточное для записи текущего значение контролируемого параметра (режим адаптивного чтения данных из Slave);
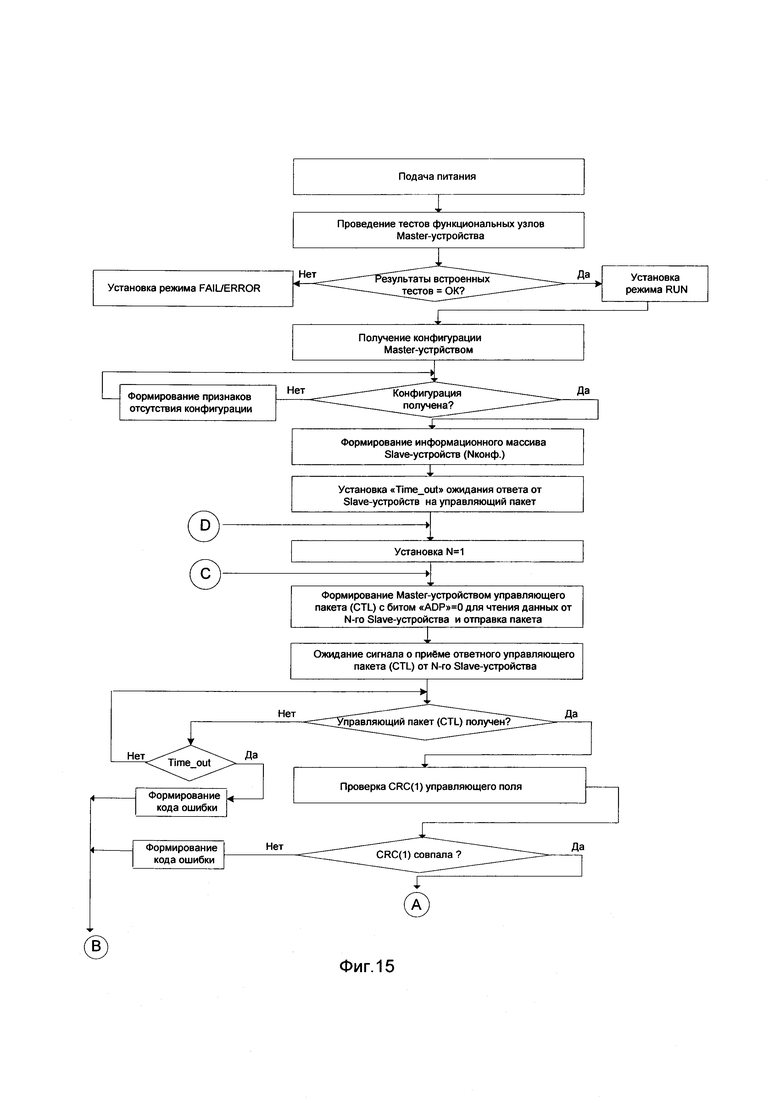
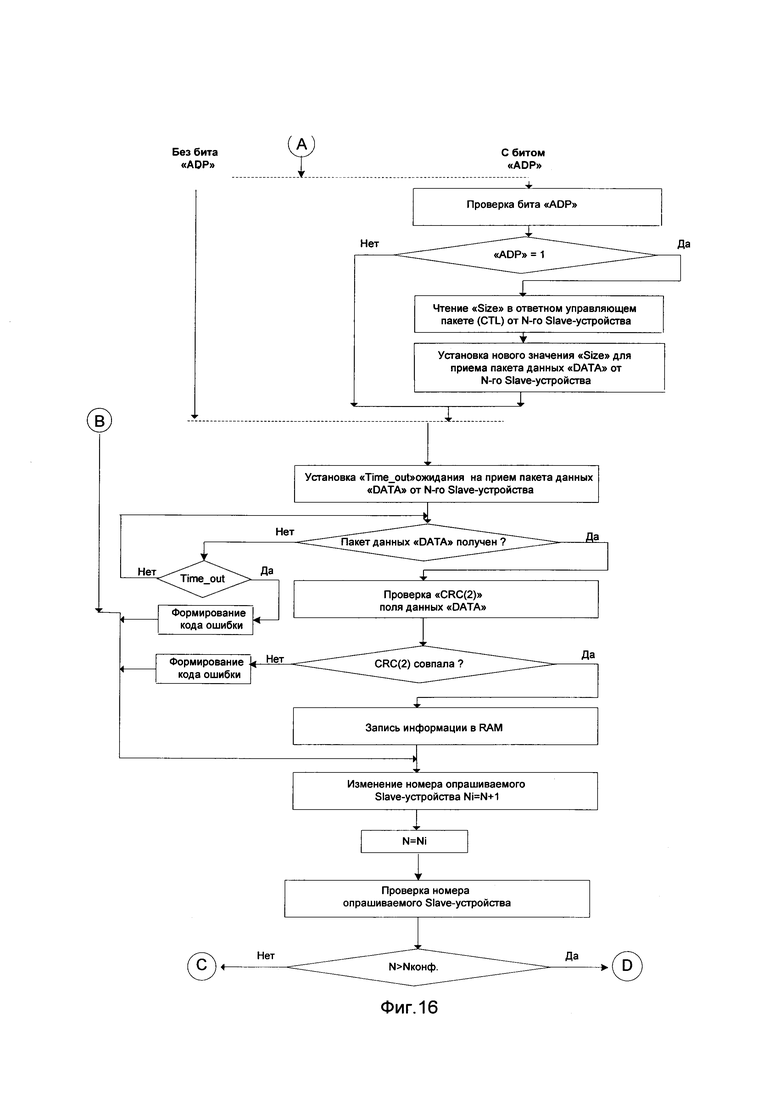
фиг. 15 и фиг. 16 - блок-схема алгоритма работы устройства (Master) при «чтении данных из устройства (Slave)».
Самым жестким требованием с точки зрения времени реакции контроллера является время формирования управляющих воздействий в электрической части системы регулирования и защиты паровой турбины (ЭЧСРиЗ), частью которой и является контроллер. Работа контроллера заключается в циклическом выполнении функций, заложенных в прикладной (технологической) программе. Время реакции контроллера - время от физического изменения дискретного сигнала на входе до изменения физического сигнала на выходе. Время реакции контроллера определяется временем выполнения следующих фаз рабочего цикла контроллера:
- временем чтения сигнала в модуле ввода (Т ввод);
- временем работы системы ввода /вывода по внутренней шине (Тввод шины) и (Твывод шины). Система ввода / вывода объединяет внутреннюю шину и устройства, участвующие в организации передачи данных по внутренней шине (устройства интерфейса);
- временем выполнения технологической программы (Ттп);
- временем записи выходного сигнала в модуле вывода (Твывод).
Время реакции контроллера определяется по формуле:
Тр = Т ввод + Т ввод шины + Т тп + Т вывод шины + Т вывод
В ЭЧСРиЗ время реакции контроллера Тр не должно превышать 3 мс.
Время выполнения технологической программы Ттп составляет 1 мс.
Однако, следует учитывать, что контролируемые контроллером процессы происходят асинхронно и изменение значения сигнала на входе может произойти после чтения сигнала. Тогда время реакции контроллера будет наибольшим из-за удвоенного времени выполнения технологической программы Ттп и удвоенного времени выполнения фаз рабочего цикла (Т ввод, Т ввод шины, Т вывод шины, Т вывод):
Т р=2 × (Т ввод + Т ввод шины + Т тп + Т вывод шины + Т вывод)


Следовательно, на работу фильтров модулей ввода-вывода (Т ввод, Т вывод) и работу системы ввода / вывода по внутренней шине (Т ввод шины, Т вывод шины) приходится 0,5 мс. Если приблизительно принять, что на работу устройств интерфейса приходится 60% от времени 0,5 мс, то время работы устройств интерфейса составит 0,3 мс.
Исходным требованием для организации "нового" интерфейса обеспечить время работы системы ввода / вывода - 0,3 мс.
Оценка необходимой тактовой частоты "нового интерфейса":
Общее количество обрабатываемых физических сигналов в системе регулирования и защиты турбины - 500. Дискретных сигналов (DI, DO) 60% - 300, из них DI (70%) - 210 и DO (30%) - 90. Аналоговых сигналов (AI) 40% - 200.
Дискретные сигналы DI, DO кодируются одним битом, аналоговые сигналы кодируются 16 битами (2 байта).
Общее количество абонентов DI (исходя из 32-х каналов на модуль)-Ndi ~ 7; общее количество абонентов DO (исходя из 32-х каналов на модуль) - Ndo ~ 3;общее количество абонентов AI (исходя из 16 каналов на модуль) - Nai ~ 13.
Общее количество "читаемой" от датчиков информации:
DI + AI = 210+200×16=3410 бит.
Общее количество "записываемой" информации - DO - 90 бит.
Суммарный объем "читаемой / записываемой" информации - 3500 бит.
Принимаем условие последовательной передачи информации за 0,3 мс по каналу и определяем необходимую для этого тактовую частоту F:
Т бит=0,3:3500=0,000086 мс. F=1 Т бит ~ 12 МГц
Протокольные стандарты содержат служебные данные в виде данных адреса, данных команд, данных обнаружения ошибок и другой информации. Истинная производительность последовательного канала уменьшается в зависимости от доли служебной информации в информационном пакете. Если принять, что объем служебной информации примерно равен объему полезной информации, то тактовая частота для "нового" интерфейса должна быть не менее 24 МГц. Следовательно, принимая, что данные передаются последовательно по одному каналу (одна дифференциальная пара сигнальных проводников), скорость передачи данных должна быть не менее 24Мбит/с.
Для осуществления способа обмена данными достаточно, по меньшей мере, одного ведущего электронного устройства (Master) 1 (далее устройства (Master) и, по меньшей мере, двух ведомых электронных устройств (Slave) 2 (далее устройства (Slave), подключенных к каналу 4 передачи данных (фиг. 1). Например, в контроллере с программируемой логикой модуль центрального процессора выступает в качестве устройства (Master) 1, а в качестве устройства (Slave) может выступать модуль ввода 2 и/или модуль вывода 3, а в качестве канала 4 передачи данных используется внутренняя цифровая шина контроллера. На фиг. 1 показаны также устройства полевого (нижнего) уровня АСУ ТП, а именно датчик 5 частоты вращения, подключенный к модулю ввода 2 и двигатель 6, подключенный к модулю вывода 3. Устройств (Master) 1 может быть два (показано на фиг. 1), но только одно из них может быть активно одновременно. Второе устройство (Master) 7, когда неактивно работает в режиме «монитор» и при выходе из строя первого устройства (Master) 1 берет инициирование обмена информацией на себя. При использовании интерфейса в контроллере может быть предусмотрен резервный канал 8.
Развитие интегральной схемотехники привело к созданию принципиально новых измерительных преобразователей - интеллектуальных датчиков (далее ИД), содержащих в одном корпусе преобразователь и микропроцессор, что позволяет выполнять основные операции по преобразованию, усилению и обработке информации в самом датчике. ИД представляет собой совокупность аппаратных и программных средств, обеспечивающих отображение свойств объекта контроля в виде некоторой структуры данных, формируемых в результате обработки выходного сигнала измерительного преобразователя по определенному алгоритму. ИД могут не только контролировать измеряемые величины, но и осуществлять их оценку, коррекцию по определенным критериям, контролировать свои собственные характеристики, работать в режиме диалога с системой управления, принимать команды, передавать измеренные значения, как правило, в цифровой форме, а также аварийные сообщения. ИД может обеспечить адаптацию (приспособление) к диапазону изменения значений измеряемой величины, к скорости изменения измеряемой величины, к воздействию влияющих факторов, включая помехи, условия окружающей среды и т.д. В качестве устройства (Slave) 9 могут выступать интеллектуальный датчик и/или интеллектуальный электропривод. Так, на фиг. 1 в качестве устройства (Slave) 9 показан ИД, подключенный непосредственно к каналу 4 передачи данных. Интерфейс должен функционировать асинхронно, в режиме «команда-ответ». Управляет передачей данных контроллер шины 10 (фиг. 2). Контроллер шины может быть выполнен в виде интегрированного СФ-блока в СнК.
В заявляемом способе предлагается использовать M-LVDS -технологию низковольтной дифференциальной передачи сигналов малых напряжений, описанную в международном промышленном стандарте TIA/EIA-899-2002 (Electrical Characteristics of Multipoint-Low-Voltage Differential Signaling (M-LVDS) Interface Circuits for Multipoint Data Interchange). Стандарт Multipoint LVDS или M-LVDS разработан для многоточечного двунаправленного обмена информацией. Для этого (фиг. 2) осуществляют полудуплексную передачу данных по одному каналу 4, который выполнен в виде дифференциальной пары проводов или проводников на печатной плате. Для выполнения основного требования многоточечного дизайна по M-LVDS-стандарту один приемопередатчик 11 устройства (Master) взаимодействует со вторым приемопередатчиком 12 устройства (Slave). Стандарт допускает подключение к шине до 32 абонентов.
Технические характеристики стандарта M-LVDS обеспечивают высокоскоростную передачу сигналов при малом энергопотреблении. Интерфейс M-LVDS предусматривает возможность горячей замены, обеспечивает устойчивую целостность сигнала и большой запас помехоустойчивости. Максимальная пропускная способность этого интерфейса в реальных условиях в зависимости от применения лежит в диапазоне 200-400 Мбит/с. Максимальное удаление между устройствами, между которыми происходит обмен данными, не должен превышать 10 метров. Следовательно, характеристики стандарта M-LVDS обеспечивают требуемый способ соединения между устройствами контроллера, необходимую пропускную способность внутренней цифровой шины контроллера, поочередную двунаправленную передачу данных, необходимое расстояние между соединяемыми устройствами, возможность горячей замены модулей контроллера, большой запас помехоустойчивости. Все эти факторы обеспечили выбор многоточечной технологии M-LVDS низковольтной дифференциальной передачи сигналов для передачи данных в "новом" интерфейсе для контроллера. M-LVDS - технология обеспечивает больший запас помехоустойчивости, если сравнивать ее с LVDS - технологией, которая более предпочтительна для быстродействия. К тому же M-LVDS - технология была принята из соображений низкой стоимости.
Вся информация по каналу передается в коде «Манчестер-2». Этот биполярный фазоманипулированный код имеет нулевую постоянную составляющую, что очень важно в применениях с высокой скоростью передачи. Кодирование 0 и 1 производится не уровнем, а фронтом сигнала в середине тактового интервала (фиг. 3), что позволяет обеспечить побитную синхронизацию передатчика и приемника по передаваемой информации в широком диапазоне отклонения несущей частоты.
Также, как и в интерфейсе по ГОСТ Р 52070-2003, определены два вида синхросигнала (фиг. 4), которые позволяют аппаратно, следовательно быстро, отличать управляющее слово от слова данных и обеспечивают пословную синхронизацию передатчика и приемника, т.е. однозначно определять начало слов в потоке 0 и 1 в канале.
На фиг. 5 показан формат управляющего слова, размер которого равен 20 битам. Управляющее слово начинается синхросигналом (3 бита), полярность первой половины которого положительна, а вторая половина - отрицательная. Далее следуют 16 информационных бит, и завершается управляющее слово битом контроля по четности (Р).
На фиг. 6 показан формат слова данных, размер которого равен 20 битам. Слово данных начинается синхросигналом (3 бита), полярность первой половины которого отрицательная, а вторая половина - положительная. Затем следует 16 битовое поле данных и завершается слово данных битом контроля по четности (Р).
Предложена пословная передача данных.
Пакет данных (DATA) (фиг. 7), состоит из одного или более слов данных и слова контрольной суммы CRC(2) слов данных, предназначенной для проверки целостности всех передаваемых в пакете данных. Слова данных (полезная информация) - собственно данные, которыми обмениваются между собой абоненты и для передачи которых используется пакет данных.
Пакет, не имеющий слов данных, называется управляющим пакетом (CTRL). Управляющий пакет может выполнять функцию начала и конца сеанса связи, подтверждения приема информационного пакета, запроса информационного пакета. Управляющие данные это данные необходимые абоненту для определения выполнения им задаваемых функций и указания своего состояния. На фиг.8 показана структура управляющего пакета (CTRL), состоящего из двух управляющих слов (первого слова cw[0] и второго слова cw[1]) и третьего слова cw[2] контрольной суммы CRC(1) двух управляющих слов. В состав управляющих слов входят адрес абонента, номер внутреннего адресного пространства запрашиваемого абонента, бит инициатора текущей передачи в канале, бит операции запись/чтение, бит адаптивного чтения полезной информации, бит подтверждения достоверности принятого информационного пакета, количество слов в поле данных.
Пакет, включающий управляющий пакет и пакет данных, называется информационным пакетом (CTRL + DATA). На фиг. 9 показана общая структура информационного пакета.
Контроль кодовой группы синхросигнала, проверка бита контроля по четности (Р) каждого слова и проверка контрольных сумм управляющих слов и слов данных обеспечивают достоверность передачи данных.
Возможные типы сообщений, которыми обмениваются ведущее (Master) и ведомое (Slave) устройства путем последовательной поочередной передачи друг другу управляющего или информационного пакетов:
- передача данных от ведущего устройства (Master) к ведомому устройству (Slave) - «запись данных в устройство (Slave)» (фиг. 10);
- широковещательное сообщение, при котором данные от ведущего устройства (Master) передаются всем ведомым устройствам (Slave) - «запись данных во все устройства (Slave)» (фиг. 11);
- передачи данных от ведомого устройства (Slave) к ведущему устройству (Master) - «чтение данных из устройства (Slave)» (фиг. 12).
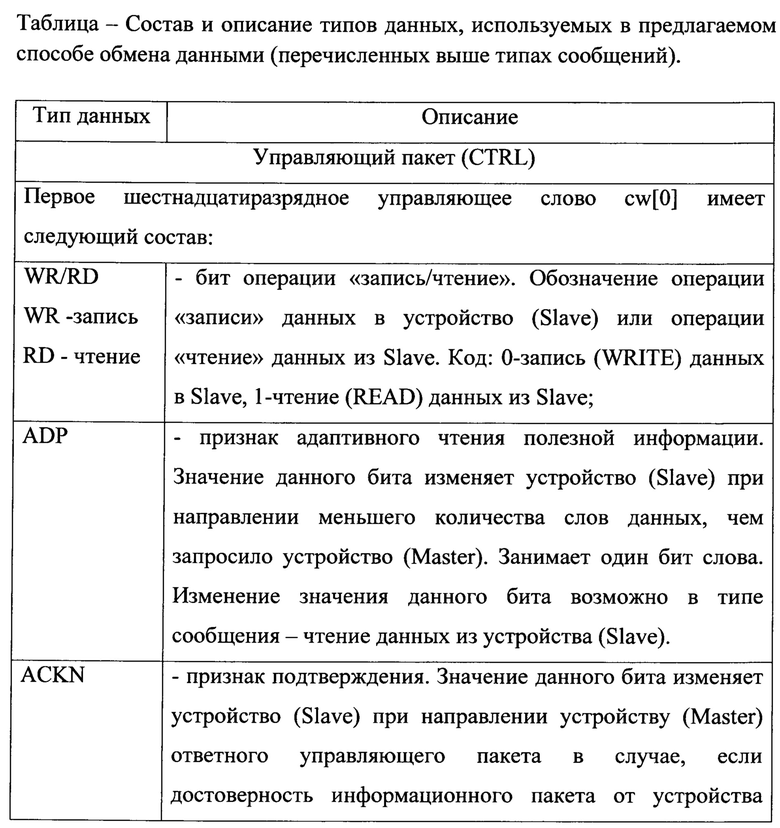
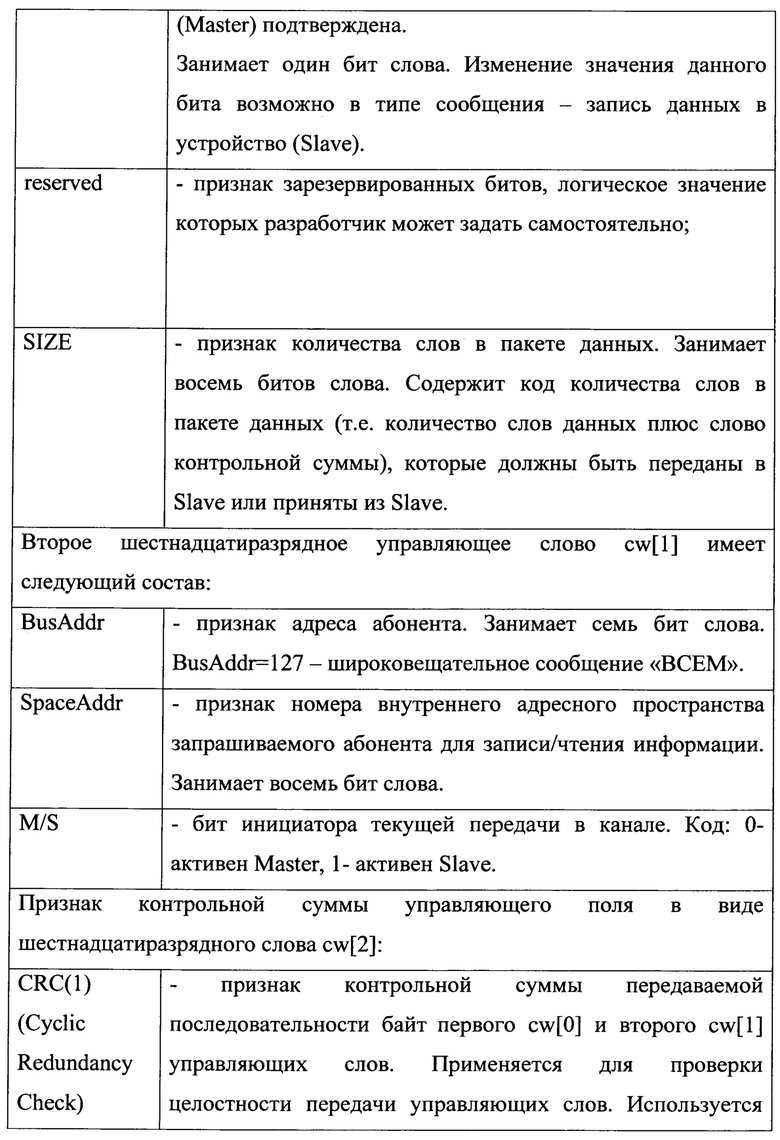
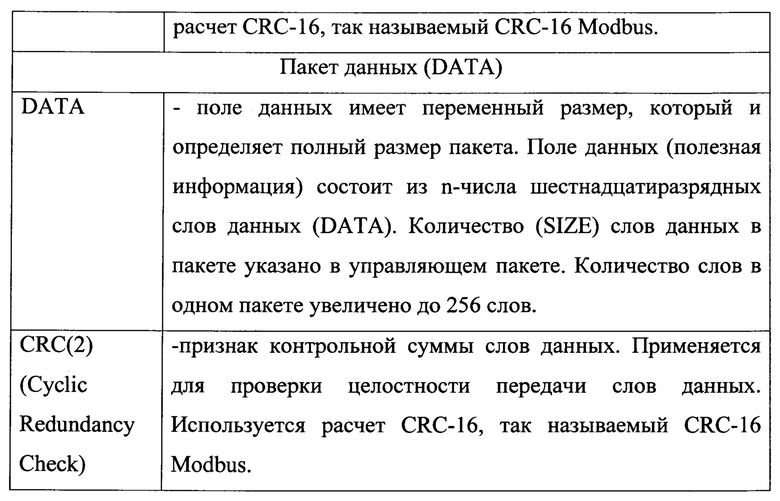
Количество абонентов на шине увеличено до 128. Количество внутренних адресных пространств у устройств (Slave) или устройств (Master) может достигать 256. Внутренние адресные пространства имеют размер от 1 до 256 слов. Максимальный размер памяти хранения сообщений устройств (Slave) или устройств (Master) неизменяем и составляет 8 Кбайт. одержание передаваемой информации может быть любым при условии совместимости с форматами слов и форматами сообщений.
Передача данных между устройством (Master) и устройствами (Slave) делится на три фазы: параметризация, конфигурирование и передача данных. В фазе параметризации и конфигурирования проверяется, соответствует ли конфигурация и параметры устройства (Slave) запланированным в устройстве (Master) установкам. Проверяется тип устройства, формат и длина передаваемых сообщений, количество входов или выходов. В фазе передачи данных устройство (Master) должно реализовывать передачу данных в устройство (Slave) и прием данных из устройства (Slave).
Рассмотрим возможные типы сообщений, которыми обмениваются ведущее (Master) и ведомое (Slave) устройства путем передачи друг другу управляющих и информационных пакетов.
Первый тип сообщения предназначен для передачи данных от устройства (Master) к устройству (Slave) - «запись данных в Slave» (фиг. 0). Устройство (Master) передает информационный пакет (с признаком «запись (WR)» в управляющем пакете), а устройство (Slave) принимает информационный пакет, просчитывает контрольную сумму CRC(1) управляющих слов и контрольную сумму CRC(2) слов данных и сравнивает их значения с полученными от устройства (Master). В зависимости от результата сравнения контрольных сумм устройство (Slave) либо игнорирует задание записи данных, либо принимает к исполнению. Если информационный пакет принят верно, устройство (Slave) посылает устройству (Master) ответный управляющий пакет (CTRL), в котором изменяет значение бита ACKN подтверждения достоверности принятого информационного пакета. Если контрольные суммы не совпадают, то считается, что целостность передаваемой информации нарушена. В этом случае устройство (Slave) игнорирует задание и отправляет ответный управляющий пакет устройству (Master), в котором значение бита ACKN не изменено. При передаче данных по каналу в одном направлении допускается интервал между соседними словами внутри пакета и между пакетами не более 100 нc. Временной интервал между пакетами, следующими в противоположном направлении не должен превышать 200 нc.
Второй тип сообщения - «широковещательное сообщение» предназначен для передачи данных от устройства (Master) всем устройствам (Slave) - «запись данных во все Slave устройства» (фиг. 1). Устройство (Master) передает информационный пакет (с признаком «запись (WR)» в управляющем поле), а устройства (Slave) принимают информационный пакет, просчитывают контрольную сумму CRC(1) управляющих слов и контрольную сумму CRC(2) слов данных и сравнивают их значения с полученными от ведущего устройства (Master). В зависимости от результата сравнения контрольных сумм устройство (Slave) либо игнорирует задание записи данных, либо принимает к исполнению. В этом режиме устройство (Master) после передачи информационного пакета не ожидает "ответного пакета" от устройств (Slave). При передаче данных по каналу в одном направлении допускается интервал между соседними словами внутри пакета и между пакетами не более 100 нc.
Третий тип сообщения предназначен для передачи данных от устройства (Slave) к устройству (Master) - «чтение данных из Slave» (фиг. 2). Устройство (Master) передает управляющий пакет (с признаком «чтение (RD)» в управляющем слове) и освобождает канал. Адресуемое устройство (Slave) принимает управляющий пакет, просчитывает контрольную сумму CRC(1) управляющих слов и сравнивает ее значение со значением контрольной суммы, полученной от устройства (Master). В зависимости от результата сравнения контрольной суммы устройство (Slave) либо игнорирует задание передачи данных, либо принимает к исполнению. При успешном сравнении устройство (Slave) захватывает канал и передает устройству (Master) ответный информационный пакет. Устройство (Master) принимает ответный информационный пакет от устройства (Slave) и просчитывает контрольную сумму CRC(1) управляющих слов и контрольную сумму CRC(2) слов данных. При успешном сравнении контрольных сумм информационный пакет от устройства (Slave) считается принятым - чтение данных устройством (Master) из устройства (Slave) завершенным. При передаче данных по каналу в одном направлении допускается интервал между соседними словами внутри пакета и между пакетами не более 100 нc. Временной интервал между пакетами, следующими в противоположном направлении не должен превышать 200 нc.
Известно, что для способа обмена данными, в котором устройство (Master) всегда инициативно запрашивает данные у устройства (Slave) характерно то, что устройство (Slave) всегда направляет устройству (Master) такое количество слов полезной информации, которое запросил у него абонент (Master) в текущем сообщении. В свою очередь устройство (Master) всегда (из цикла в цикл) запрашивает максимально возможное количество слов полезной информации, т.е. запрашивает количество слов полезной информации, необходимое для записи такого значения контролируемого параметра, для которого требуется максимальное количество слов полезной информации. Значение контролируемого параметра, измеренного с заданной точностью, и является полезной информацией. Предлагается передавать по каналу только «нужное» количество слов полезной информации, в то время как традиционно в системах «Master/Slave» передается максимально возможное количество слов полезной информации. Включенный в информационный пакет признак адаптивного чтения ADP дает возможность при «чтении данных из устройства (Slave)», передавать по каналу только такое количество слов, предназначенных для записи полезной информации, которое достаточно для записи текущего значения контролируемого параметра, что увеличивает производительность канала (внутренней шины контроллера).
Например: При чтении данных из устройства (Slave) устройство (Master) запрашивает значение измеряемого (контролируемого) параметра, например значение температуры. Допустим, что для передачи предельного значения температуры, например Тmax=+70°, необходимо четыре слова данных (фиг. 13). Это максимальное количество слов данных (полезной информации), необходимое для записи контролируемой температуры. Устройство (Master) направляет в устройство (Slave) управляющий пакет (CTRL) в первом слове cw[0] которого SIZE=5, т.е. устройство (Master) запрашивает у устройства (Slave) информационный пакет, в котором поле данных должно состоять из четырех слов данных (d[0], d[1], d[2], d[3]) и одного слова контрольной суммы CRC(2) (режим полного чтения) (фиг. 13). Но диапазон номинальных значений измеряемого параметра температуры в 90% случаев не выходит за пределы значений °С+21…+40. Для записи номинальных значений температуры необходимо одно слово в поле данных. Следовательно, каждый раз, при передаче номинального значения температуры по каналу направляется три «лишних» слова, биты которых установлены в логический ноль. Поэтому, в процессоре устройства (Slave), анализируется текущее значение измеренной температуры, например T1=+25°, и выставляется в ответном информационном пакете (CTRL + DATA) SIZE=2, т.е. устройство (Slave) отправляет устройству (Master) информационный пакет, в котором одно слово данных (d[0]) и одно слово контрольной суммы CRC(2) (режим адаптивного чтения данных из Slave) (фиг. 14). В результате имеем сокращение времени ΔТр обслуживания конкретного устройства (Slave) (модуля ввода-вывода, ИД) примерно на 28%. Процентный временной выигрыш ΔТр можно рассчитать по формуле:
 где:
где:
х - максимальное количество слов данных, зарезервированное для данного контролируемого параметра;
у - минимально необходимое количество слов для текущего значения контролируемого параметра.
Для того, чтобы устройство (Master) не восприняло переданный устройством (Slave) информационный пакет с меньшим количеством слов полезной информации как ошибку, в состав управляющих слов управляющего и информационного пакетов включен признак адаптивного чтения ADP. В приведенном примере устройство (Master) направляет в устройство (Slave) управляющий пакет (CTRL) со значением "0" в бите ADP и выставленным значением Size - количество запрашиваемых слов в пакете данных. В свою очередь, устройство (Slave) при направлении ответного информационного пакета (CTRL + DATA) с количеством слов данных меньшим, чем запрашивалось в управляющем пакете, изменяет значение в бите ADP. В ответном информационном пакете бит ADP имеет значение "1". Полученный информационный пакет в управляющем слове которого ADP=1, устройство (Master) воспринимает как команду к установке нового значения Size для приема пакета данных (DATA) от устройства (Slave) (фиг. 15, фиг. 16). Если устройство (Slave) направляет в устройство (Master) такое количество слов данных, какое запросило устройство (Master), то значение бита ADP в ответном информационном пакете не изменяется и сохраняет значение "0".
| название | год | авторы | номер документа |
|---|---|---|---|
| Сложно-функциональный блок для СБИС типа система на кристалле | 2018 |
|
RU2691886C1 |
| Способ передачи данных по шине, система связи для осуществления данного способа и устройство автоматической защиты для предотвращения аварийной ситуации на объекте управления | 2018 |
|
RU2705421C1 |
| Интерфейс с динамическим шифрованием информации, обеспечивающий защиту передаваемых данных от несанкционированного доступа в системах связи | 2021 |
|
RU2783917C1 |
| КОНТРОЛЛЕР СЕТЕВОГО ТРАНСПОРТНОГО ПРОТОКОЛА | 2019 |
|
RU2721230C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ | 2017 |
|
RU2651242C1 |
| Способ передачи данных | 2020 |
|
RU2758059C1 |
| СЕТЕВОЙ МОДУЛЬ СВЯЗИ ПО РАДИОКАНАЛУ (СМРК) ДЛЯ СИСТЕМЫ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЕЗДОМ С РАСПРЕДЕЛЕННЫМИ ПО ЕГО ДЛИНЕ ЛОКОМОТИВАМИ | 2004 |
|
RU2252167C1 |
| Контроллер сетевого транспортного протокола | 2018 |
|
RU2692571C1 |
| СПОСОБ, А ТАКЖЕ СИСТЕМА ДЛЯ НАДЕЖНОЙ ПЕРЕДАЧИ ЦИКЛИЧЕСКИХ ПЕРЕДАВАЕМЫХ ДАННЫХ ПРОЦЕССА | 2008 |
|
RU2452114C2 |
| СПОСОБ РАБОТЫ ЛОКАЛЬНОЙ СЕТИ | 2008 |
|
RU2362206C1 |


Изобретение относится к способу передачи данных. Технический результат – обеспечение передачи данных по внутренней шине с заданной скоростью, а также обеспечение достоверности переданной информации. Для этого предложен способ передачи данных, который заключается в том, что между по меньшей мере одним ведущим электронным устройством и по меньшей мере двумя ведомыми электронными устройствами осуществляют полудуплексную передачу данных. Для этого используют многоточечную технологию низковольтной дифференциальной передачи сигналов M-LVDS. Сообщения имеют вид управляющего пакета или информационного пакета, состоящего из управляющего пакета и пакета данных. Управляющий пакет состоит из трех слов, в состав двух из которых входят адрес абонента, номер внутреннего адресного пространства запрашиваемого абонента, бит инициатора текущей передачи в канале, бит операции запись/чтение, бит адаптивного чтения полезной информации, бит подтверждения достоверности принятого информационного пакета, количество слов данных, а третье слово определяет контрольную сумму двух других слов. 1 з.п. ф-лы, 16 ил., 1 табл., 1 пр.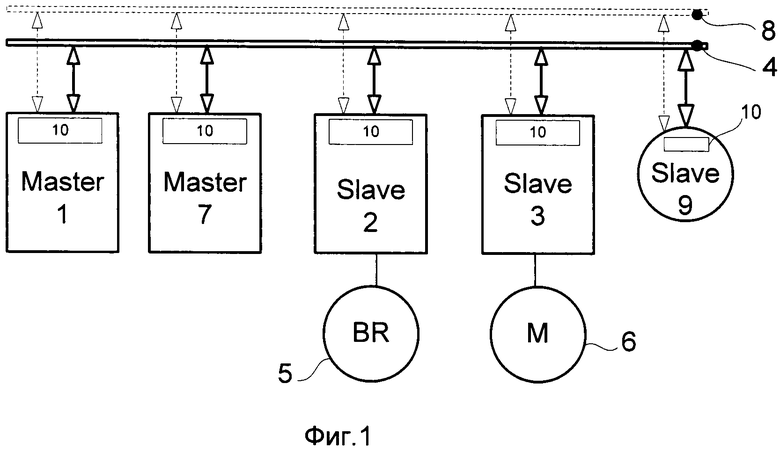
1. Способ передачи данных в промышленном контроллере, заключающийся в том, что между по меньшей мере одним ведущим электронным устройством и по меньшей мере двумя ведомыми электронными устройствами осуществляют пословный обмен данными, при котором осуществляют запись данных из ведущего устройства в ведомое устройство или чтение данных ведущим устройством из ведомого устройства, отличающийся тем, что между электронными устройствами, соединение между которыми имеет тип "общая шина", осуществляют полудуплексную последовательную передачу данных со скоростью передачи данных по одному общему каналу в диапазоне 24-55 Мбит/с, для чего используют многоточечную технологию низковольтной дифференциальной передачи сигналов M-LVDS с подключенными к каналу приемопередатчиками ведущего и ведомых электронных устройств, передачу данных между ведущим электронным устройством и ведомым электронным устройством осуществляют в виде управляющего пакета или информационного пакета, состоящего из управляющего пакета и пакета данных, управляющий пакет и пакет данных состоят из двадцатибитных слов, каждое из которых начинается трехбитным синхросигналом, имеет шестнадцать информационных бит и завершается битом контроля по четности, пакет данных состоит из одного или более слов полезной информации и слова контрольной суммы слов полезной информации, управляющий пакет состоит из трех слов, в состав двух из которых входят адрес абонента, номер внутреннего адресного пространства запрашиваемого абонента, бит инициатора текущей передачи в канале, бит операции запись/чтение, бит адаптивного чтения полезной информации, бит подтверждения достоверности принятого информационного пакета, код количества слов в пакете данных, а третье слово определяет контрольную сумму двух других слов управляющего пакета, при этом при чтении значения контролируемого параметра бит адаптивного чтения полезной информации имеет разное значение в управляющем пакете и в информационном пакете в случае, когда в направленном ведущим электронным устройством в ведомое электронное устройство управляющем пакете запрашивают максимально возможное количество слов полезной информации, необходимое для записи значения контролируемого параметра, а затем ведомое устройство отправляет в ведущее устройство информационный пакет с меньшим количеством слов полезной информации, чем запрашивалось, и достаточным для записи текущего значения контролируемого параметра.
2. Способ передачи данных в промышленном контроллере по п. 1, отличающийся тем, что канал передачи данных выполнен в виде дифференциальной пары проводов или проводников на печатной плате.
| US 7243173 B2, 10.07.2007 | |||
| ПРИБОР ПРИЕМА-ПЕРЕДАЧИ ИНФОРМАЦИОННЫХ МАССИВОВ | 2016 |
|
RU2601833C1 |
| УНИВЕРСАЛЬНЫЙ ДВУНАПРАВЛЕННЫЙ ПОСЛЕДОВАТЕЛЬНЫЙ ИНТЕРФЕЙС ПЕРЕДАЧИ ДАННЫХ И СПОСОБ ПЕРЕДАЧИ ДАННЫХ | 2004 |
|
RU2345401C2 |
| ИНТЕРФЕЙС ВЫСОКОСКОРОСТНОЙ ПЕРЕДАЧИ ДАННЫХ | 2004 |
|
RU2369033C2 |

