Изобретение относится к области передачи информации и может быть использовано при построении бортовых информационных систем космических аппаратов.
Бортовая вычислительная сеть (БВС) космического аппарата и бортовая информационно-телеметрическая система (БИТС) различаются сигналами интерфейсов, а циркулирующие в них потоки информации являются асинхронными и не совпадают между собой по скорости передачи данных, что вызывает необходимость использования буферных устройств.
Из уровня техники известны буферные устройства в системах передачи информации.
Известна система для передачи информации, предназначенная для обмена информацией между отдельными приборами бортовой телеметрической системы, работающей в режиме «адресный запрос - ответ» (авторское свидетельство SU1840458, опубликовано 20.03.2007). Техническим результатом изобретения является повышение информативности системы путем устранения пауз между "запросами" за счет использования для выдачи тактовых импульсов, выделенных из трехпозиционного кода адреса, а также за счет обеспечения возможности управлением скорости передачи. Использование в устройстве тактовых импульсов адресных посылок для вывода запрошенной информации позволяет повысить оперативный обмен информацией. Управление скоростью передачи осуществляется за счет того, что выдача ответной информации определяется тактовыми импульсами прибора-запросчика.
Ближайшим аналогом предлагаемого устройства является устройство для передачи информации в адаптивных телеметрических системах (патент РФ 2103745, опубликован 27.01.1998). Данное устройство содержит амортизатор информации, синхронизатор, измеритель времени, блоки памяти адреса и информации, блок управления передачей и блок управления маркировкой отсчетов и формированием кадров сообщений.
Недостатками известных устройств является отсутствие организации приема/передачи данных по ГОСТ Р 52070-2003 и синхронизации передачи информационного потока на частоте 12,8 кГц.
Техническим результатом, на решение которого направлено заявляемое техническое решение, является согласование бортовой информационно-вычислительной сети с информационными потоками бортовой информационно-телеметрической системы на основе ГОСТ Р 52070-2003 и синхронизация передачи информационного потока на частоте 12,8 кГц.
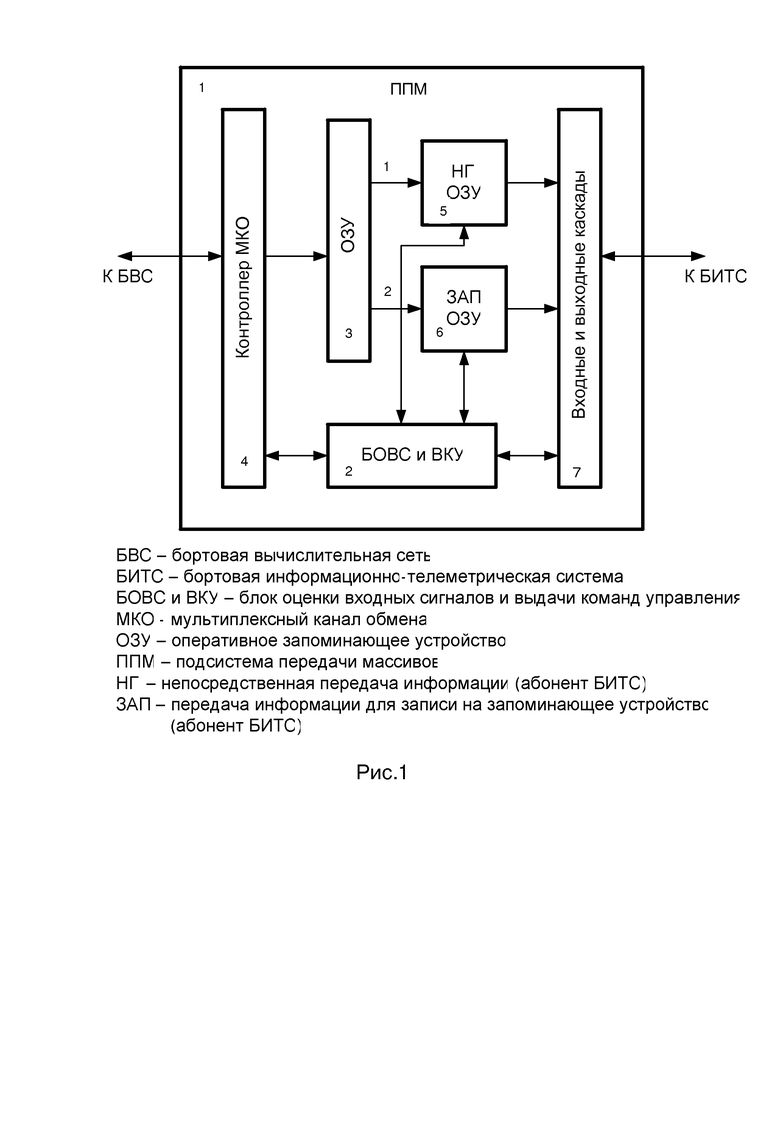
Схема заявленного устройства поясняется рис. 1.
На рис.1 представлена блок-схема устройства (прибора) приема-передачи информационных массивов (ППМ) 1, которая включает блок оценки входных сигналов и выдачи команд управления (БОВС и ВКУ) 2, оперативное запоминающее устройство (ОЗУ) 3, контроллер мультиплексного канала обмена (МКО) 4, оперативное запоминающее устройство непосредственной передачи информации (НП ОЗУ) 5, оперативное запоминающее устройство информации для записи на запоминающее устройство (ЗАП ОЗУ) 6, входные и выходные каскады 7.
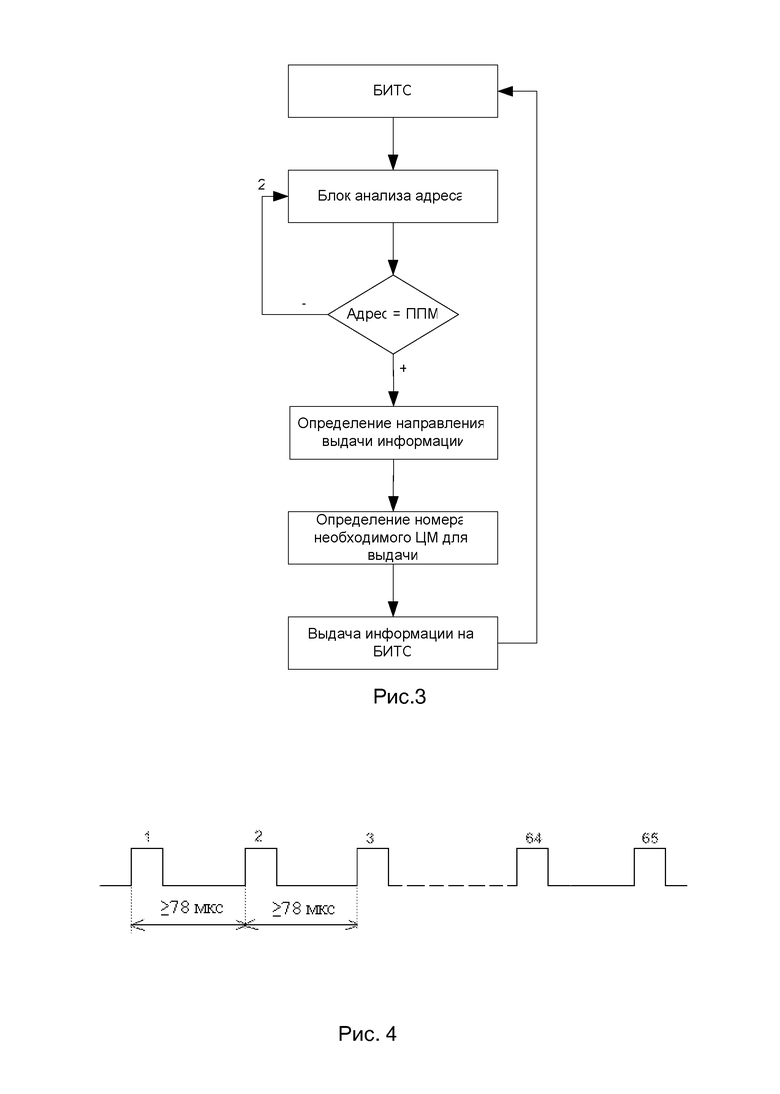
Блок оценки входных сигналов и выдачи команд управления предназначен для выдачи команд управления элементам ППМ. Блок-схема, раскрывающая алгоритм приема информации по МКО от БВС представлена на рис.2, блок-схема, раскрывающая алгоритм передачи информации на БИТС, представлена на рис.3.
Контроллер мультиплексного канала обмена предназначен для приема информации от БВС по ГОСТ Р 52070-2003 и передачи ее на последующую обработку, реализован на специализированной микросхеме, например HI-6121 PQM фирмы Holt IC.
Оперативное запоминающее устройство предназначено для хранения обработанной информации для последующей ее выдачи на НП ОЗУ или ЗАП ОЗУ.
Оперативное запоминающее устройство непосредственной передачи информации (НП ОЗУ) предназначено для хранения информации для последующей ее выдачи абоненту БИТС.
Оперативное запоминающее устройство информации для записи на запоминающее устройство (ЗАП ОЗУ) предназначено для хранения информации для последующей ее выдачи абоненту БИТС.
БОВС и ВКУ, ОЗУ, НП ОЗУ и ЗАП ОЗУ реализованы на ПЛИС, например APA 1000B CQFP фирмы Microsemi.
Входные каскады предназначены для приема информации от БИТС при помощи двунаправленных шинных формирователей.
Выходные каскады предназначены для выдачи информации абонентам БИТС через шинные формирователи и биполярные транзисторы, используя открытый коллектор.
ППМ работает следующим образом.
По принятии цифрового массива (ЦМ) контроллер отвечает БВС по магистрали МКО словом состояния (СС). Далее с контроллера МКО данные в виде ЦМ поступают в ОЗУ. По командам управления с БОВС и ВКУ и в соответствии с адресами, поступающими через входные каскады, данные поступают в одну из двухуровневых ОЗУ, хранящих информацию для абонентов БИТС (НП или ЗАП). НП ОЗУ и ЗАП ОЗУ имеют двухуровневую структуру для реализации возможности повторения выданного ранее ЦМ при отсутствии новых данных. Далее данные через выходные каскады по шине данных поступают на БИТС от НП ОЗУ или ЗАП ОЗУ.
Для МКО ППМ выполняет роль оконечного устройства (ОУ) и обеспечивает прием и выполнение команд управления, принятых в соответствии с ГОСТ Р 52070-2003.
Признаком команды управления в командном слове (КС) являются коды 11111 и 00000 [1].
В ответном слове (ОС) ОУ формирует признаки:
- ошибка в сообщении;
- принята групповая команда;
- неисправность абонента;
- неисправность ОУ;
- абонент занят - признак формируется только на время передачи массива из ОУ в ОЗУ буферного устройства в промежутке между обращениями к прибору.
Остальные признаки не формируются. Групповые команды обмена не обрабатываются, групповые команды управления выполняются. ОУ обслуживает по записи двух абонентов - НП и ЗАП, а по чтению передает МКО слово состояния (СС) абонентов.
ОУ обеспечивает обмен информацией с БВС по любой активизированной ЛПИ из четырех. Одновременная выдача информации более чем по одной линии не допускается.
ППМ реагирует на команды управления.
Для контроля за процессом передачи ЦМ от БВС на БИТС имеется возможность опроса СС ППМ по магистрали МКО в виде основного сообщения в формате Ф2, состоящего из одного слова. ОУ формирует СС не позже, чем через 300 мкс после выдачи ОС в конце ЦМ.
В случае, если ЦМ принят ОУ без ошибок и ОЗУ свободна, ОУ передает ЦМ в ОЗУ и в ОС устанавливает признак «Абонент занят», который сохраняется до передачи ЦМ в ОЗУ примерно 13,5 мс. При опросе по МКО СС в этот период в ответ выдается только ОС с признаком «Абонент занят», который свидетельствует о том, что ЦМ передается в ОЗУ.
В случае, если ЦМ принят ОУ с нарушением формата МКО или программная логика прибора не готова принять информацию в ОЗУ, то ОУ не передает ЦМ в ОЗУ. При опросе по МКО СС ОУ в ответ выдает ОС без признака «Абонент занят» и СС.
Через время не более 13,5 мс после окончания приема цифрового массива по МКО ОУ в ответном слове снимает признак «Абонент занят» и при опросе по МКО слова состояния ОУ будет выдавать ответное слово без признака «Абонент занят» и слово состояния.
Начало считывания каждого очередного фрагмента массива синхронизируется с определенной начальной позицией ТМ-кадра, определяемой программой формирования кадра. Для каждого фрагмента массива на отдельной (65-й по счету) позиции должен передаваться указатель фрагмента массива - номер области памяти, из которой считан фрагмент массива. Значение указателя фрагмента массива относится только к одному текущему фрагменту, извлеченному из ОЗУ, место нахождения 65-го байта в кадре должно быть определено программой измерений. Если в ТМ-кадре передается два фрагмента массива от данного источника (ЦВМ или ТВМ), указатели фрагмента массива должны быть переданы для каждого фрагмента на любой позиции после последнего байта фрагмента. При малой активности работы БВС в ОЗУ ППМ может оказаться меньше, чем два массива. Это приводит к повторению передачи массива из последней загруженной области ОЗУ ППМ в информационную магистраль БИТС.
Массивы должны поступать асинхронно с частотой несколько выше, чем время считывания из ОЗУ ППМ в канал передачи информации. В случае заполнения ОЗУ ППМ (нет свободного ОЗУ для данного режима очередной (новый) массив записывается в ОУ поверх старого, но не переписывается в ОЗУ ППМ, и система снова входит в синхронный режим работы. При передачи по МКО информации для двух режимов НП и ЗАП, ЦМ для каждого из режимов должны содержать все 10 фрагментов.
Информация для НП или ЗАП должна чередоваться с учетом соотношения информативностей между НП и ЗАП, поскольку для приема массивов используется только одно ОУ.
При выдаче массива по МКО в ППМ должно быть определено для какого информационного потока (НП, ЗАП) предназначен данный массив - это указывается набором подадресов. Информация для каждого информационного потока записывается в свое ОЗУ и считывается по своей программе разворота ТМ-кадра. Программы для НП и ЗАП могут разворачиваться одновременно. В случае необходимости передать какой-либо ЦМ и в ТМ-кадре НП, и в ТМ-кадре ЗАП, этот массив должен быть выдан в БИТС дважды с различной последовательностью подадресов.
Максимальная частота обращения системы БИТС к ППМ равна 12,8 кГц. Пример обращения со стороны БИТС показан на рисунке 4, где
1 - начало ЦМ; 2,3,…,64 - текущий адрес; 65 - 65-й адрес
В случае временной остановки передачи ЦМ от БВС будет осуществляться повторение последнего ЦМ. В случае, если после включения ППМ не получил ни одного ЦМ от БВС, а БИТС осуществляет запрос данных, то ППМ высылает на информационную магистраль набор логических нулей (отсутствие информации).
Список использованной литературы
1. ГОСТ Р 52070-2003.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ КОСМИЧЕСКОГО АППАРАТА ПОВЫШЕННОЙ ЖИВУЧЕСТИ | 2016 |
|
RU2636384C1 |
| СПОСОБ ФОРМИРОВАНИЯ ОТКАЗОУСТОЙЧИВОЙ ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ И ОТКАЗОУСТОЙЧИВАЯ ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА | 2010 |
|
RU2439674C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ ТЕЛЕМЕТРИЧЕСКОГО КОНТРОЛЯ | 2024 |
|
RU2827068C1 |
| СИСТЕМА УПРАВЛЕНИЯ, СБОРА И ОБРАБОТКИ ДАННЫХ С БОРТОВОЙ РЕГИСТРИРУЮЩЕЙ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2012 |
|
RU2498399C1 |
| АВТОМАТИЗИРОВАННЫЙ ИСПЫТАТЕЛЬНЫЙ КОМПЛЕКС ДЛЯ ЭЛЕКТРИЧЕСКИХ ИСПЫТАНИЙ КОСМИЧЕСКИХ АППАРАТОВ | 2014 |
|
RU2552576C1 |
| Малогабаритная бортовая аппаратура формирования и передачи телеметрической информации беспилотного летательного аппарата | 2018 |
|
RU2676387C1 |
| Способ управления космическим аппаратом | 2020 |
|
RU2735655C1 |
| СПОСОБ ФОРМИРОВАНИЯ 4-КАНАЛЬНОЙ ОТКАЗОУСТОЙЧИВОЙ СИСТЕМЫ БОРТОВОГО КОМПЛЕКСА УПРАВЛЕНИЯ ПОВЫШЕННОЙ ЖИВУЧЕСТИ И ЭФФЕКТИВНОГО ЭНЕРГОПОТРЕБЛЕНИЯ И ЕГО РЕАЛИЗАЦИЯ ДЛЯ КОСМИЧЕСКИХ ПРИМЕНЕНИЙ | 2011 |
|
RU2449352C1 |
| КОСМИЧЕСКИЙ РАДИОЛОКАТОР С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ, ФОРМИРУЮЩИЙ ИЗОБРАЖЕНИЕ В РЕАЛЬНОМ ВРЕМЕНИ | 1999 |
|
RU2158008C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ НАГРЕВАТЕЛЯМИ АППАРАТУРЫ КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2571728C1 |

Изобретение относится к области передачи информации и может быть использовано при построении бортовых информационных систем космических аппаратов. Технический результат заключается в согласовании бортовой информационно-вычислительной сети с информационными потоками бортовой информационно-телеметрической системы и синхронизации передачи информационного потока. Прибор приема-передачи информационных массивов предназначен для согласования асинхронных и несовпадающих между собой по скорости передачи данных и сигналов интерфейсов БВС с информационными потоками БИТС и передачи информации по ГОСТ Р 52070-2003. Прибор приема-передачи информационных массивов включает в себя блок оценки входных сигналов и выдачи команд управления, оперативное запоминающее устройство, контроллер мультиплексного канала обмена, оперативное запоминающее устройство непосредственной передачи информации, оперативное запоминающее устройство информации для записи на запоминающее устройство, входные и выходные каскады. 4 ил.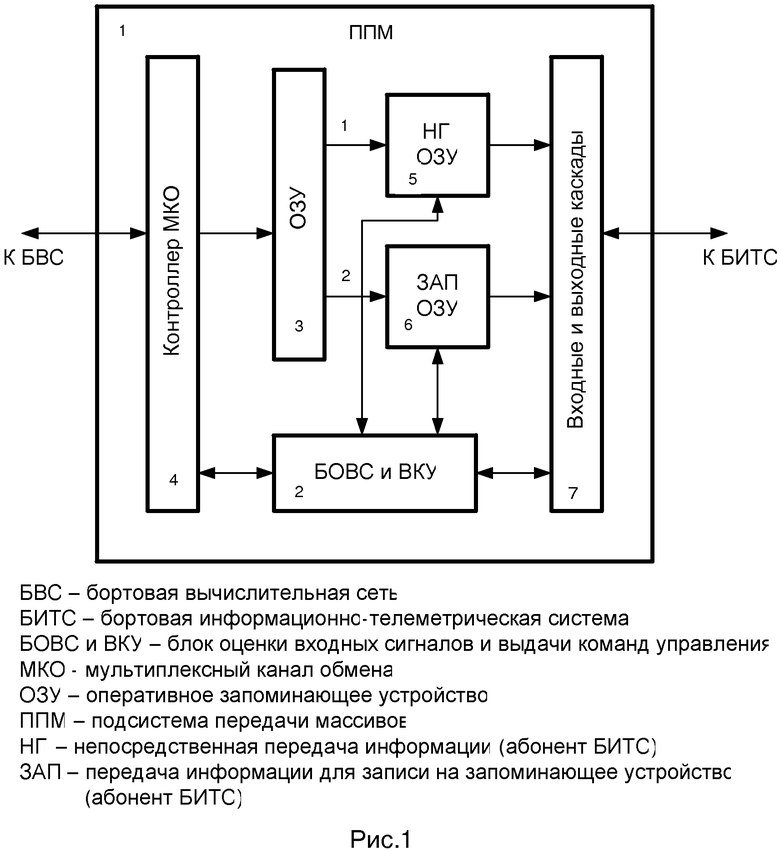
Прибор приема-передачи информационных массивов включает блок оценки входных сигналов и выдачи команд управления, оперативное запоминающее устройство, контроллер мультиплексного канала обмена информации, оперативное запоминающее устройство непосредственной передачи информации и оперативное запоминающее устройство для записи на запоминающее устройство, входные и выходные каскады, при этом контроллер мультиплексного канала обмена соединен с бортовой вычислительной сетью оперативным запоминающим устройством и блоком оценки входных сигналов и выдачи команд управления, первый выход оперативного запоминающего устройства соединен с входом оперативного запоминающего устройства непосредственной передачи информации, второй выход оперативного запоминающего устройства соединен с входом оперативного запоминающего устройства для записи на запоминающее устройство, выходы оперативного запоминающего устройства непосредственной передачи информации и оперативного запоминающего устройства для записи на запоминающее устройство соединены с блоком оценки входных сигналов и выдачи команд управления и входными и выходными каскадами, которые соединены с блоком оценки входных сигналов и выдачи команд управления и с бортовой информационно-телеметрической сетью.
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ В АДАПТИВНЫХ ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМАХ | 1995 |
|
RU2103745C1 |
| СИСТЕМА ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ | 1988 |
|
SU1840458A1 |
| СПОСОБ РЕГИСТРАЦИИ И ОБРАБОТКИ ТЕЛЕМЕТРИЧЕСКОГО СИГНАЛА С ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ КАНАЛОВ | 2007 |
|
RU2338261C1 |
| US 6411148 B1, 25.07.2002. | |||

