Изобретение относится к области машиностроения, в частности к гидропневматическим независимым подвескам колесных модулей транспортных средств, и может быть использовано для создания гидропневматических независимых подвесок грузовых и легковых автомобилей.
Известна независимая подвеска для подрессоренного управляемого колеса, содержащая вал рулевого управления, который посредством вильчатой перемычки взаимодействует с подвижной примерно в вертикальном направлении линейной направляющей. Вильчатая перемычка создает вокруг проходящей примерно вертикально оси вращения поворотное управляющее сочленение с рамой транспортного средства. Линейная направляющая снабжена приводным двигателем для привода управляемого колеса и соединена с демпфирующим элементом, содержащим рабочее тело и образующим несущий компонент вильчатой перемычки. Демпфирующий элемент содержит демпфирующий цилиндр, выполненный в качестве вала рулевого управления, и имеет один или несколько резервуаров высокого давления, снабженных разъемами и сообщающихся с демпфирующим цилиндром через системы трубопроводов (Патент №2562091 РФ, B60G 3/01, B60G 11/28, опубл. 10.09.2015).
Техническим результатом аналога является компактная конструкция независимой подвески, достижение большого дорожного просвета транспортного средства за счет применения линейной направляющей, снабженной приводным двигателем для привода управляемого колеса.
Недостатками этой подвески являются ее ограниченные функциональные возможности: демпфирование осуществляется только за счет упругости газа в цилиндре; отсутствие в системе подвески элементов, которые бы позволяли изменять дорожный просвет и регулировать положение кузова относительно дороги независимо от загрузки автомобиля; повышение центра масс во время движения при повороте транспортного средства, а именно увеличение плеча опрокидывающей силы относительно точки опрокидывания.
Известна гидропневматическая управляемая подвеска транспортного средства, содержащая смонтированные между осями колес транспортного средства и его корпусом гидроцилиндры, связанные своей одной рабочей полостью непосредственно, а другой - через обратные клапаны и золотники горизонтирования с гидромагистралями соответствующего борта транспортного средства, которые через гидропневмоаккумулятор, золотник управления им и источник питания связаны с резервуаром рабочей жидкости; колеса, положение которых изменяется с помощью дистанционного управления вне зависимости от наличия их контакта с опорной поверхностью; отдельные для каждого борта транспортного средства магистрали высокого давления, в каждой из которых золотник управления соответствующего гидропневмоаккумулятора связан с золотниками горизонтирования этого борта транспортного средства, и магистралями, связывающими золотники управления гидропневмоаккумуляторами с резервуаром; магистрали, каждая из которых связывает соответствующий золотник управления гидропневмоаккумулятором с резервуаром, и в которой установлен предохранительный клапан; каждый золотник горизонтирования выполнен трехпозиционным (А.с. №1092057 СССР, B60G 21/06, опубл. 15.05.1984).
Техническим результатом аналога является дистанционное управление положением колес транспортного средства независимо от наличия их контакта с опорной поверхностью, сохранение транспортным средством горизонтального положения в поперечной плоскости при движении вдоль склона, наезде на препятствие и при появлении крена.
Недостатками такой подвески являются сложность конструкции и ее ограниченные функциональные возможности: демпфирование осуществляется только за счет упругости газа в гидропневмоаккумуляторах.
Известна независимая подвеска транспортного средства, содержащая поворотное колесо с приводным электрическим двигателем, гидравлический амортизатор, нижним концом связанный через кронштейн с приводом колеса, а верхним - с корпусом транспортного средства, поперечно установленные двойные верхние и нижние рычаги (Patent ЕР №3112194, B60G 13/02, B60G 2/20, В60K 7/00, date of patent 29.01.2015).
Техническим результатом аналога является снижение габаритов подвески, удобство поворота за счет поперечно установленных двойных верхних и нижних рычагов.
Недостатками независимой подвески является отсутствие в системе подвески элементов, которые бы позволяли изменять дорожный просвет и регулировать положение кузова относительно дороги независимо от загрузки автомобиля; повышение центра масс во время движения при повороте транспортного средства, а именно увеличение плеча опрокидывающей силы относительно точки опрокидывания; ограниченные функциональные возможности: демпфирование осуществляется только за счет упругости жидкости в амортизаторе.
Известно устройство подвески для приведения в движение и управления колесом транспортного средства, содержащее колесо транспортного средства, подвижно установленное на раме и приводимое во вращение встроенным гидравлическим двигателем; механизм поворота колеса, включающий в себя шарнирно установленные нижние поворотные рычаги, направляющую стойку, выполненную в виде гидравлического цилиндра, нижним концом жестко закрепленную на основании гидравлического двигателя, а верхним концом удерживающуюся упругой опорой, выполненной в виде резинового подшипника, тяги, шарнирно закрепленной с механизмом вращения цилиндра; гидравлический цилиндр, состоящий из неподвижного штока, внутри которого имеется канал для сообщения рабочей полости гидроцилиндра с напорной магистралью, и подвижного цилиндра, внутри которого имеется канал для сообщения рабочей полости с гидравлическим двигателем (Patent US №5542492, B60G 3/20; B60G 3/00; B60G 11/26; B60G 17/04 и др., date of patent 06.08.1996). Принят за прототип.
Техническим результатом прототипа является снижение габаритов подвески, возможность изменения дорожного просвета и уменьшение высоты рамы.
К недостаткам описанного устройства подвески, принятого в качестве прототипа, относятся увеличенные габаритные размеры, ограниченные функциональные возможности, заключающиеся в том, что демпфирование осуществляется только за счет упругости жидкости в цилиндре, отсутствие автоматической системы стабилизации рамы транспортного средства относительно поверхности дороги.
В основу изобретения положена техническая задача по созданию компактной гидропневматической независимой подвески колесного модуля транспортного средства с расширенными функциональными возможностями, заключающимися в значительном уменьшении ударных нагрузок на несущую конструкцию, регулировании дорожного просвета в широких пределах, увеличении угла поворота колеса, возможности рекуперирования энергии.
Указанная задача решается тем, что в гидропневматической независимой подвеске колесного модуля транспортного средства, содержащей колесо, подвижно установленное на раме и приводимое во вращение встроенным гидравлическим двигателем, направляющую стойку, нижний конец подвижной части которой жестко соединен с корпусом гидравлического двигателя, гидроцилиндр со штоком, внутри которого имеется канал, согласно изобретению, направляющая стойка подвески выполнена в виде пустотелого цилиндра с днищем и установлена на раме с помощью подшипников, а внутри нее помещена подвижная в осевом направлении часть подвески, выполненная в виде изготовленного заодно пневмоцилиндра с плавающим поршнем и гидроцилиндра, у которого свободный конец штока соединен с днищем направляющей стойки, причем пневмоцилиндр соединен посредством управляемых вентилей с пневмомагистралью, а гидроцилиндр - с напорной гидромагистралью пневмогидравлического аккумулятора, на раме также закреплен шаговый гидродвигатель с шестерней, взаимодействующей с выполненным на наружной поверхности направляющей стойки зубчатым сектором, обеспечивающим ее повороты, а на сопрягаемых поверхностях направляющей стойки и пневмоцилиндра выполнены шлицы, с помощью которых достигается осевое перемещение пневмоцилиндра с колесом, причем для снижения трения в шлицевом соединении установлены тела качения, например, шарики, кроме этого, для предотвращения ударов свободного торца гидроцилиндра о днище направляющей стойки в последней установлен буфер сжатия из эластичного материала, а для регулирования величины дорожного просвета транспортного средства в подвеске предусмотрены пневматический компрессор и пневматический аккумулятор, подсоединенные с помощью управляемого вентиля к пневмомагистрали.
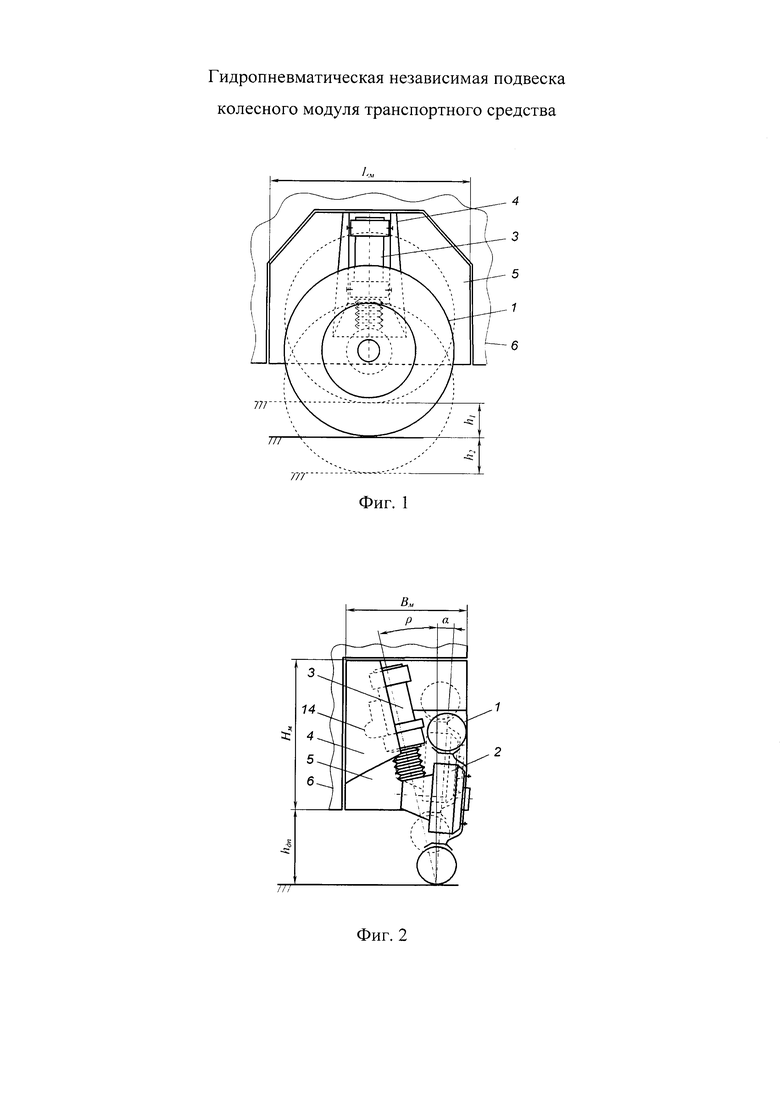
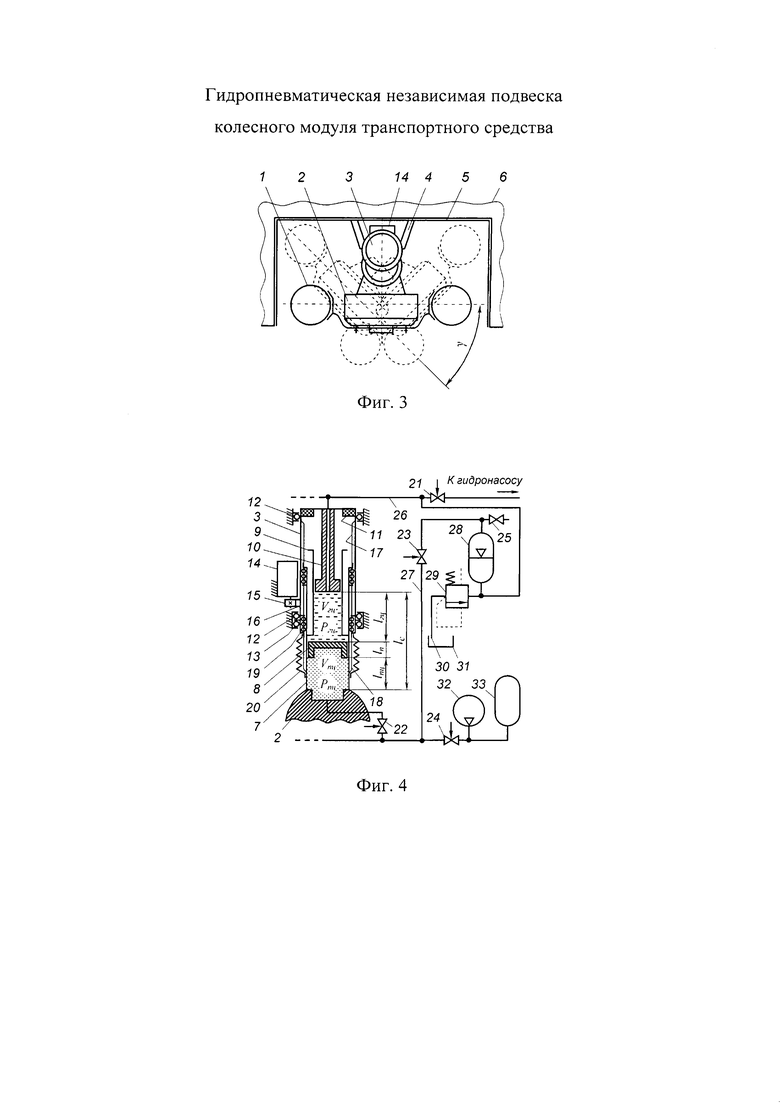
На фиг. 1 изображена кинематическая схема гидропневматической независимой подвески колесного модуля транспортного средства, вид сбоку; на фиг. 2 - то же, вид сзади; на фиг. 3 - то же, вид сверху; на фиг. 4 - гидравлическая схема гидропневматической независимой подвески колесного модуля транспортного средства.
Основными узлами гидропневматической независимой подвески колесного модуля транспортного средства (фиг. 1, 2, 3) являются колесо 1, приводимое во вращение встроенным гидравлическим двигателем 2, направляющая стойка 3 подвески, нижним концом жестко соединенная с корпусом гидравлического двигателя 2 и установленная посредством кронштейнов 4 с помощью, как минимум, одного радиального 12 и двух радиально-упорных подшипников качения 13 на раме 5 гидропневматической независимой подвески колесного модуля транспортного средства. В свою очередь, рама 5 гидропневматической независимой подвески колесного модуля транспортного средства крепится с помощью болтовых соединений к раме 6 транспортного средства. Направляющая стойка 3 (фиг. 4) выполнена в виде пустотелого цилиндра с днищем, внутри которой помещена подвижная в осевом направлении часть подвески, выполненная в виде изготовленного заодно пневмоцилиндра 7 с плавающим поршнем 8 и гидроцилиндра 9, у которого свободный конец штока 10 соединен с днищем направляющей стойки 3. В штоке 10 выполнен канал для сообщений рабочей полости гидроцилиндра 9 с напорной гидромагистралью 26 пневмогидравлического аккумулятора 28. Для предотвращения ударов свободного торца гидроцилиндра 9 о днище направляющей стойки 3 в последней установлен буфер сжатия 11 из эластичного материала. На раме 5 гидропневматической независимой подвески колесного модуля транспортного средства закреплен шаговый гидродвигатель 14 с шестерней 15, взаимодействующей с выполненным на наружной поверхности направляющей стойки 3 зубчатым сектором 16, обеспечивающим ее повороты, а на сопрягаемых поверхностях направляющей стойки 3 и пневмоцилиндра 7 выполнены соответственно внутренние 17 и внешние 18 шлицы, с помощью которых достигается осевое перемещение пневмоцилиндра 7 с колесом 1. С целью снижения трения при вертикальном перемещении корпуса пневмоцилиндра 7 в шлицевом соединении установлены шарики 19. От загрязнения внешние шлицы 18 защищены гофрированным кожухом 20 из эластичного материала. Гидравлическая схема гидропневматической независимой подвески колесного модуля транспортного средства (фиг. 4) включает в себя дистанционно управляемый вентиль 21 подачи рабочей жидкости от гидронасоса, напорную гидромагистраль 26, к которой подсоединяются с помощью тройников, гибких трубопроводов и штуцеров каналы штоков 10 всех гидропневматических независимых подвесок колесных модулей транспортного средства. Для первоначального заполнения и периодической подзарядки пневмогидравлического аккумулятора 28 инертным газом от внешнего источника предусмотрен запорный вентиль 25. Пневмоцилиндр 7 заполняют от внешнего источника сжатым нейтральным газом с помощью открытых управляемых вентилей 22, 23 и запорного вентиля 25 через пневмомагистраль 27 до расчетных значений параметров давления Рпц и объема Vпц. Защита пневмогидравлического аккумулятора 28 от завышенного давления, а также от возможных излишков рабочей жидкости из-за переходных процессов, перепадов температур и др., неизбежных при работе гидросистемы гидропневматической независимой подвески колесного модуля транспортного средства, сбрасываются посредством предохранительного клапана 29 и сливного трубопровода 30 в бак 31 с рабочей жидкостью. Для регулирования величины дорожного просвета транспортного средства в подвеске предусмотрены пневматический компрессор 32 и пневматический аккумулятор 33, подсоединенные с помощью управляемого вентиля 24 к пневмомагистрали 27.
При вводе в эксплуатацию транспортное средство без груза устанавливается на ровной площадке, пневмоцилиндры 7 гидропневматических независимых подвесок колесных модулей транспортного средства заполняют от внешнего источника сжатым нейтральным газом (например, аргоном) с помощью открытых управляемых вентилей 22, 23 и запорного вентиля 25 до достижения расчетного значения давления Рпц во всей пневмосистеме, после чего все три вентиля закрывают. При этом плавающие поршни 8 занимают крайние верхние положения до их упоров в нижние торцы гидроцилиндров 9, т.е. на наибольшем расстоянии  от основания пневмоцилиндра 7 (фиг. 4). После зарядки пневмосистемы все гидроцилиндры 9 одновременно заполняют рабочей жидкостью от гидронасосного узла транспортного средства посредством напорной гидромагистрали 26 и дистанционно управляемого вентиля 21 до расчетных значений параметров давления Ргц, объемов Vгц и высоты положения поршней
от основания пневмоцилиндра 7 (фиг. 4). После зарядки пневмосистемы все гидроцилиндры 9 одновременно заполняют рабочей жидкостью от гидронасосного узла транспортного средства посредством напорной гидромагистрали 26 и дистанционно управляемого вентиля 21 до расчетных значений параметров давления Ргц, объемов Vгц и высоты положения поршней  Это обеспечивает выдвижение совмещенных между собой пневмоцилиндров 7 и гидроцилиндров 9 на суммарную величину
Это обеспечивает выдвижение совмещенных между собой пневмоцилиндров 7 и гидроцилиндров 9 на суммарную величину  направляющей стойки 3 гидропневматической независимой подвески колесного модуля транспортного средства, соответствующую заданному дорожному просвету hдп транспортного средства.
направляющей стойки 3 гидропневматической независимой подвески колесного модуля транспортного средства, соответствующую заданному дорожному просвету hдп транспортного средства.
Работа гидропневматической независимой подвески колесного модуля транспортного средства заключается в следующем. При движении транспортного средства по неровностям дороги незначительные вертикальные перемещения колеса 1 в пределах величины перемещения пневмоцилиндра 7 гасятся за счет сжатого в нем газа. При этом объем Vгц рабочей жидкости и соответственно величина  в гидроцилиндре 9 остаются неизменными, так как давление Ргц рабочей жидкости в нем предусмотрительно устанавливается с помощью пневмогидравлического аккумулятора 28 более высоким, чем давление Рпц в пневмоцилиндре 7. При наезде на препятствия или при движении одного или нескольких колес 1 по более высоким неровностям дороги высотой h1 и (или) глубиной h2 возрастающая нагрузка на колесах сначала гасится пневмоцилиндрами 7. Затем, по мере совместного перемещения пневмоцилиндра 7 и гидроцилиндра 9 вверх, незначительная часть рабочей жидкости вытесняется по напорной гидромагистрали 26 в гидроцилиндры 9 остальных гидропневматических независимых подвесок колесных модулей транспортного средства, а большая ее часть, вследствие возросшего давления Ргц в напорной гидромагистрали 26, поступает в пневмогидравлический аккумулятор 28, который таким образом включится в работу и воспримет основную нагрузку. Благодаря сообщающимся между собой посредством напорной гидромагистрали 26 полостям гидроцилиндров 9 всех гидропневматических независимых подвесок колесных модулей транспортного средства, распределение рабочей жидкости при одинаковом давлении в каждом из них происходит в объемах, обеспечивающих автоматически независимое копирование каждым колесом преодолеваемых препятствий или неровностей. Суммарная допустимая величина перемещения подвижной части направляющей стойки (пневмоцилиндра 7) с колесом 1 для рассматриваемого транспортного средства составляет
в гидроцилиндре 9 остаются неизменными, так как давление Ргц рабочей жидкости в нем предусмотрительно устанавливается с помощью пневмогидравлического аккумулятора 28 более высоким, чем давление Рпц в пневмоцилиндре 7. При наезде на препятствия или при движении одного или нескольких колес 1 по более высоким неровностям дороги высотой h1 и (или) глубиной h2 возрастающая нагрузка на колесах сначала гасится пневмоцилиндрами 7. Затем, по мере совместного перемещения пневмоцилиндра 7 и гидроцилиндра 9 вверх, незначительная часть рабочей жидкости вытесняется по напорной гидромагистрали 26 в гидроцилиндры 9 остальных гидропневматических независимых подвесок колесных модулей транспортного средства, а большая ее часть, вследствие возросшего давления Ргц в напорной гидромагистрали 26, поступает в пневмогидравлический аккумулятор 28, который таким образом включится в работу и воспримет основную нагрузку. Благодаря сообщающимся между собой посредством напорной гидромагистрали 26 полостям гидроцилиндров 9 всех гидропневматических независимых подвесок колесных модулей транспортного средства, распределение рабочей жидкости при одинаковом давлении в каждом из них происходит в объемах, обеспечивающих автоматически независимое копирование каждым колесом преодолеваемых препятствий или неровностей. Суммарная допустимая величина перемещения подвижной части направляющей стойки (пневмоцилиндра 7) с колесом 1 для рассматриваемого транспортного средства составляет  что гарантирует устойчивое движение автомобиля по фунтовым дорогам. После преодоления колесом препятствия или неровности на поверхности дороги гидросистема подвески автоматически возвращается в исходное состояние под воздействием энергии заряженного пневмогидравлического аккумулятора 28. При снижении давления рабочей жидкости, в том числе по причине естественных утечек, оно автоматически восстанавливается от гидронасоса гидропривода транспортного средства до установленных значений с помощью дистанционно управляемого вентиля 21.
что гарантирует устойчивое движение автомобиля по фунтовым дорогам. После преодоления колесом препятствия или неровности на поверхности дороги гидросистема подвески автоматически возвращается в исходное состояние под воздействием энергии заряженного пневмогидравлического аккумулятора 28. При снижении давления рабочей жидкости, в том числе по причине естественных утечек, оно автоматически восстанавливается от гидронасоса гидропривода транспортного средства до установленных значений с помощью дистанционно управляемого вентиля 21.
Использование в гидропневматической независимой подвеске колесного модуля транспортного средства реверсивного и регулируемого по частоте вращения гидравлического двигателя 2 позволяет водителю устанавливать необходимый скоростной режим движения автомобиля как передним, так и задним ходом, а также обеспечивать надежное его торможение. Управление автомобилем водителем осуществляется с помощью гидропривода, включающего шаговый гидродвигатель 14 (фиг. 2), микропроцессор и датчики углов поворота, установленных на каждой гидропневматической независимой подвеске колесного модуля транспортного средства (на фиг. не показаны). Использование функции поворота колес у всех гидропневматических независимых подвесок колесных модулей транспортного средства в сочетании с системой автоматического управления каждым из них позволяет максимально уменьшить радиус поворота автомобиля. Кроме этого, благодаря увеличенному углу поворота γ колеса (фиг. 3), составляющему не менее 50-60°, обеспечиваемому принятой кинематической схемой гидропневматической независимой подвески колесного модуля транспортного средства, движение автомобиля может осуществляться также в боковом направлении, что облегчает маневрирование машины в стесненных условиях погрузочной и разгрузочной площадок. В зависимости от принимаемой колесной формулы и назначения транспортного средства возможно упрощение конструкции гидропневматической независимой подвески колесного модуля транспортного средства для задних колес за счет исключения в ней механизмов поворота колес или применения двухскатных колес. Важным достоинством гидропневматической независимой подвески колесного модуля транспортного средства является ее компактность, так как размеры гидропневматической независимой подвески колесного модуля транспортного средства Lм, Нм и Вм (фиг. 1, 2) значительно меньше традиционных подвесок транспортных средств аналогичного назначения. При этом отпадает необходимость использования металлоемких и недостаточно надежных элементов трансмиссии и ходовой части автомобиля таких, как: коробки передач, сцепления, раздаточной коробки, рессор, передней балки, задних мостов, карданных валов и других деталей и узлов. Это позволяет снизить массу и металлоемкость автомобиля, рационально компоновать силовой агрегат и более полезно использовать межколесное пространство транспортного средства.
Конструкция гидропневматической независимой подвески колесного модуля транспортного средства позволяет поддерживать величину дорожного просвета hдп постоянной, независимо от загрузки автомобиля, что улучшает его проходимость, плавность хода и управляемость. Это обеспечивается с помощью автоматической системы стабилизации рамы автомобиля относительно поверхности дороги, выполненной на основе микропроцессора, датчиков давления сжатого газа Рпц в пневмоцилиндре 7 и рабочей жидкости Ргц в гидроцилиндре 9, а также датчиков контроля величины дорожного просвета hдп в реальном масштабе времени. Микропроцессор управляет как индивидуально каждой гидропневматической независимой подвеской колесного модуля транспортного средства, так и работой всей системы подвески автомобиля путем выдачи соответствующих команд управляемым вентилям 21, 22 и 23, а также предохранительному клапану 29, которые избирательно обеспечивают перемещения каждого из гидроцилиндров 9 гидропневматической независимой подвески колесного модуля транспортного средства на необходимую величину (фиг. 4).
Предлагаемая конструкция гидропневматической независимой подвески колесного модуля транспортного средства также может использоваться на колесных тракторах и полноприводных прицепах для транспортирования как обычных, так и длинномерных грузов (магистральных труб большого диаметра, строительных конструкций, опор линий электропередач и др.), а также жидкостей в цистернах с Т-образным сечением. Кроме этого, транспортные средства с гидропневматическими независимыми подвесками колесных модулей, оснащенные соответствующими кузовами, могут найти широкое применение для перевозки штучных и сыпучих строительных материалов (песок, керамзит, уголь, гравий, цемент и т.п.) с вертикальной разгрузкой через специально предусмотренные нижние люки кузова Т-образного сечения. При этом разгрузка сыпучих материалов возможна как на специальных эстакадах, так и на площадках при максимально поднятой раме автомобиля, обеспечиваемой гидропневматической независимой подвеской колесного модуля транспортного средства, без или с перемещением транспортного средства до полного опорожнения кузова. Возможно применение гидропневматических независимых подвесок колесных модулей транспортного средства предлагаемой конструкции, обеспечивающих при разгрузке вывешивание всего автомобиля на высоту до одного метра и более.
Предложенная гидропневматическая независимая подвеска колесного модуля транспортного средства соответствует условию промышленной применимости и может быть изготовлена на стандартном оборудовании с применением освоенных ранее технологий и материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Напольный малогабаритный стенд для исследования подвесок автомобилей | 2016 |
|
RU2629636C1 |
| Тележка транспортировочная | 2018 |
|
RU2683430C9 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2599075C1 |
| Задняя подвеска транспортного средства | 2021 |
|
RU2769203C1 |
| Способ наклона колес и кузова транспортного средства в сторону поворота | 2020 |
|
RU2737081C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2280565C1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ОСИ ТРАНСПОРТНОГО СРЕДСТВА | 2023 |
|
RU2819091C1 |
| Рекуперативный гидропривод лесовозного автомобиля с прицепом | 2019 |
|
RU2714041C1 |
| АВТОМОБИЛЬНОЕ КРАНОВОЕ ШАССИ | 2018 |
|
RU2684838C1 |
| ГИДРОПНЕВМАТИЧЕСКАЯ ПОДВЕСКА КОЛЕСА ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2560216C1 |
Изобретение относится к гидропневматическим независимым подвескам. Гидропневматическая независимая подвеска колесного модуля содержит колесо, встроенный гидравлический двигатель, направляющую стойку, гидроцилиндр со штоком. Нижний конец стойки жестко соединен с корпусом двигателя. Стойка подвески выполнена в виде пустотелого цилиндра с днищем и установлена на раме с помощью подшипников. Внутрь стойки помещена подвижная в осевом направлении часть подвески, выполненная в виде изготовленного заодно пневмоцилиндра с плавающим поршнем и гидроцилиндра. Свободный конец штока, имеющего канал, соединен с днищем стойки. Пневмоцилиндр соединен посредством управляемых вентилей с пневмомагистралью, а гидроцилиндр - с напорной гидромагистралью аккумулятора. На раме закреплен шаговый гидродвигатель с шестерней, взаимодействующей с выполненным на наружной поверхности стойки зубчатым сектором. На сопрягаемых поверхностях стойки и пневмоцилиндра выполнены шлицы. В шлицевом соединении установлены тела качения, например, шарики. В стойке установлен буфер сжатия. Пневматический аккумулятор и пневматический компрессор подсоединены с помощью управляемого вентиля к пневмомагистрали. Достигается создание компактной подвески с расширенными функциональными возможностями. 4 ил.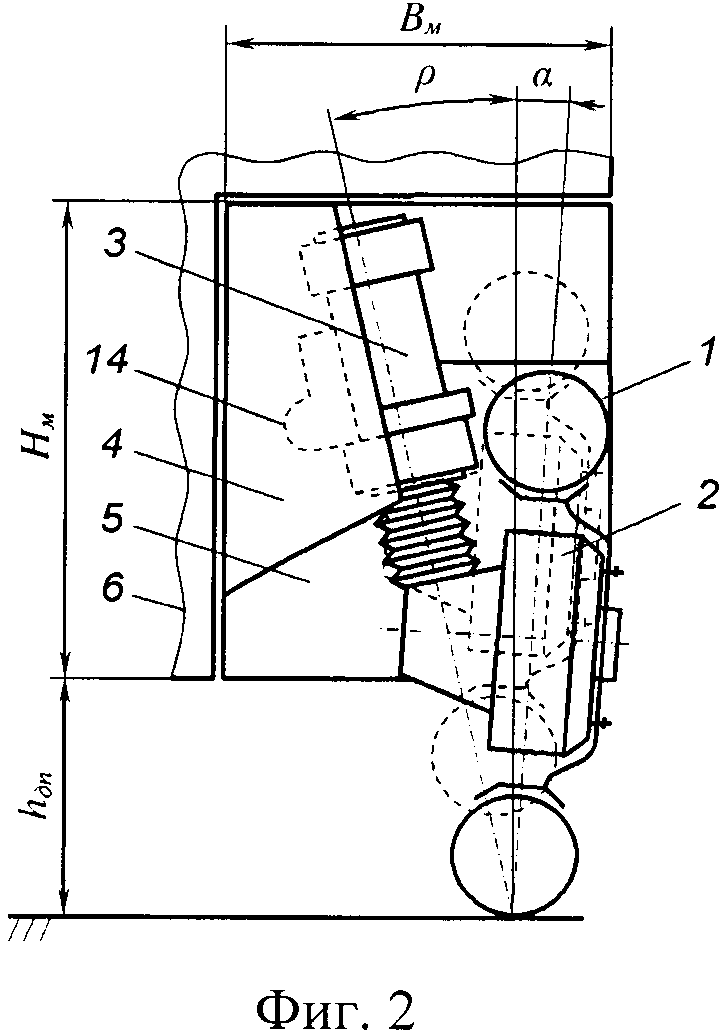
Гидропневматическая независимая подвеска колесного модуля транспортного средства, содержащая колесо, подвижно установленное на раме и приводимое во вращение встроенным гидравлическим двигателем, направляющую стойку, нижний конец подвижной части которой жестко соединен с корпусом гидравлического двигателя, гидроцилиндр со штоком, внутри которого имеется канал, отличающаяся тем, что направляющая стойка подвески выполнена в виде пустотелого цилиндра с днищем и установлена на раме с помощью подшипников, а внутри нее помещена подвижная в осевом направлении часть подвески, выполненная в виде изготовленного заодно пневмоцилиндра с плавающим поршнем и гидроцилиндра, у которого свободный конец штока соединен с днищем направляющей стойки, причем пневмоцилиндр соединен посредством управляемых вентилей с пневмомагистралью, а гидроцилиндр - с напорной гидромагистралью пневмогидравлического аккумулятора, на раме также закреплен шаговый гидродвигатель с шестерней, взаимодействующей с выполненным на наружной поверхности направляющей стойки зубчатым сектором, обеспечивающим ее повороты, а на сопрягаемых поверхностях направляющей стойки и пневмоцилиндра выполнены шлицы, с помощью которых достигается осевое перемещение пневмоцилиндра с колесом, причем для снижения трения в шлицевом соединении установлены тела качения, например, шарики, кроме этого, для предотвращения ударов свободного торца гидроцилиндра о днище направляющей стойки в последней установлен буфер сжатия из эластичного материала, а для регулирования величины дорожного просвета транспортного средства в подвеске предусмотрены пневматический компрессор и пневматический аккумулятор, подсоединенные с помощью управляемого вентиля к пневмомагистрали.
| US 2013069336 A1, 21.03.2013 | |||
| WO 2016042220 A1, 24.03.2016 | |||
| US 2015224845 A1, 13.08.2015 | |||
| ПОДВЕСКА ПЕРЕДНИХ УПРАВЛЯЕМЫХ КОЛЁС | 2002 |
|
RU2232683C1 |

