Изобретение относится к самоходным, автономным транспортным средствам, в частности к производственным транспортировочным устройствам, может использоваться в качестве платформы для перевозки грузов внутри производственных помещений, между производственными площадками.
Известно транспортное устройство тележечного типа по патенту РФ на изобретение №2450945, В61В 13/12, 2012. Устройство снабжено автоматическим средством для фиксации платформы в верхнем предельном положении. Устройство снабжено приводом перемещения фрикционного типа и фрикционным приводным колесом, входящим в контакт под давлением с фрикционной приводной поверхностью. Недостатком транспортного средства является фиксации платформы только в верхнем положении, его низкая маневренность, невозможность опускания платформы с фиксацией ее горизонтального положения для подвода под объект погрузки.
Известна гидропневматическая подвеска для транспортного средства по SU 1791167 A1, B60G 23/00, 1993. Подвеска используется для гусеничных или многоопорных колесных машин, например катков. Подвеска содержит гидроцилиндр, связанный с рычагом подвески, датчики давлений, блок управления с насосной установкой и бак с рабочей жидкостью. Пневморессора соединена через электромагнитный клапан с источником давления газа. Гидрокамера связана посредством клапанов с гидроцилиндром. Возможность высокоскоростного изменения положения катка при наезде на препятствие обеспечивается наличием автоматически управляемых искровых электрических разрядников для создания электрогидравлического эффекта. Недостатком является отсутствие возможности удержания рамы катка в горизонтальном положении при наезде на препятствие, малая маневренность в условиях ограниченного пространства закрытого производственного помещения.
В качестве ближайшего аналога заявляемому техническому решению выбрана тележка транспортировочная по патенту US 4598782 А, 08.07.1986, содержащая платформу, источник электроэнергии, систему управления, колесные модули, при этом каждый колесный модуль содержит роликонесущее колесо, связанное с собственным электродвигателем, причем электродвигатели связаны с контроллером системы управления. Недостатком является недостаточная маневренность известной тележки.
Технический результат заявляемого изобретения заключается в повышении маневренности с сохранением горизонтального положения платформы тележки при ее поступательном и криволинейном движении, при поднятии-опускании платформы.
Технический результат достигается за счет того, что в транспортировочной тележке, содержащей платформу, источник электроэнергии, систему управления, колесные модули, при этом каждый колесный модуль содержит роликонесущее колесо, связанное с собственным электродвигателем, причем электродвигатели связаны с контроллером системы управления, согласно изобретению, каждый колесный модуль имеет собственную систему подвески, содержащую шарнирно установленный на раме платформы тележки несущий элемент, пневмо/гидроцилиндр, одним концом закрепленный на платформе, а вторым - на несущем элементе, пневмо/гидроцилиндры связаны с общими для всех колесных модулей источником давления, причем электромагнитные клапаны пневмо/гидроцилиндров, и датчики давления, реагирующие на усилие, возникающее в пневмо/гидроцилиндрах при перемещении тележки, связаны с упомянутым контроллером системы управления.
Технический результат обеспечивается тем, что тележка имеет независимые друг от друга колесные модули, каждый из которых содержит роликонесущее колесо и свой собственный двигатель. Управление двигателями осуществляется с помощью цифрового контроллера системы управления, позволяющего задать скорость и направление вращения каждого колеса. Конструкция роликонесущего колеса обеспечивает ему три степени свободы. Вращение может происходить вокруг оси колеса, вокруг осей роликов и относительно точки соприкосновения колеса с поверхностью опоры. Опорные ролики колеса установлены под углом 45° по отношению к оси колеса. Роликонесущее колесо, называемое также Меканум-колесом, колесом Илона или шведским колесом позволяет транспорту двигаться в любом направлении, вращаться на месте при минимальной силе трения и низком вращательном моменте. Направление движения тележки задается путем изменения направления и скорости вращения колеса. Направление вращения колес задает траекторию передвижения тележки без дополнительных рулевых устройств. Использование роликонесущих колес с собственными двигателями позволяет повысить маневренность транспортировочной тележки. Использование собственной подвески для каждого роликонесущего колеса позволяет обеспечить горизонтальность платформы для размещения груза при любых движения тележки. Установка несущего элемента подвески, связанного с опорным узлом, на шарнире, соединение гидро/пневмоцилиндра с рамой и несущим элементом позволяет компенсировать колебания колес. Соединение каждого пневмо/гидроцилиндра независимого колесного модуля с контроллером через электромагнитный клапан позволяет управлять положением каждого конкретного колеса для сохранения горизонтальности погрузочной платформы тележки. Связь пневмо/гидроцилиндра с источником давления позволяет выравнивать давление в каждом конкретном колесе до установленного, одинакового для всех колес давления. Регулирование давления колес позволяет сохранять горизонтальность верхней поверхности тележки при ее опускании - поднятии. Контроль за давлением колес обеспечивается датчиками давления колес, связанными с контроллером. Таким образом, конструкция колесных модулей позволяет обеспечить маневренность при сохранении горизонтального положения платформы тележки при любом ее движении.
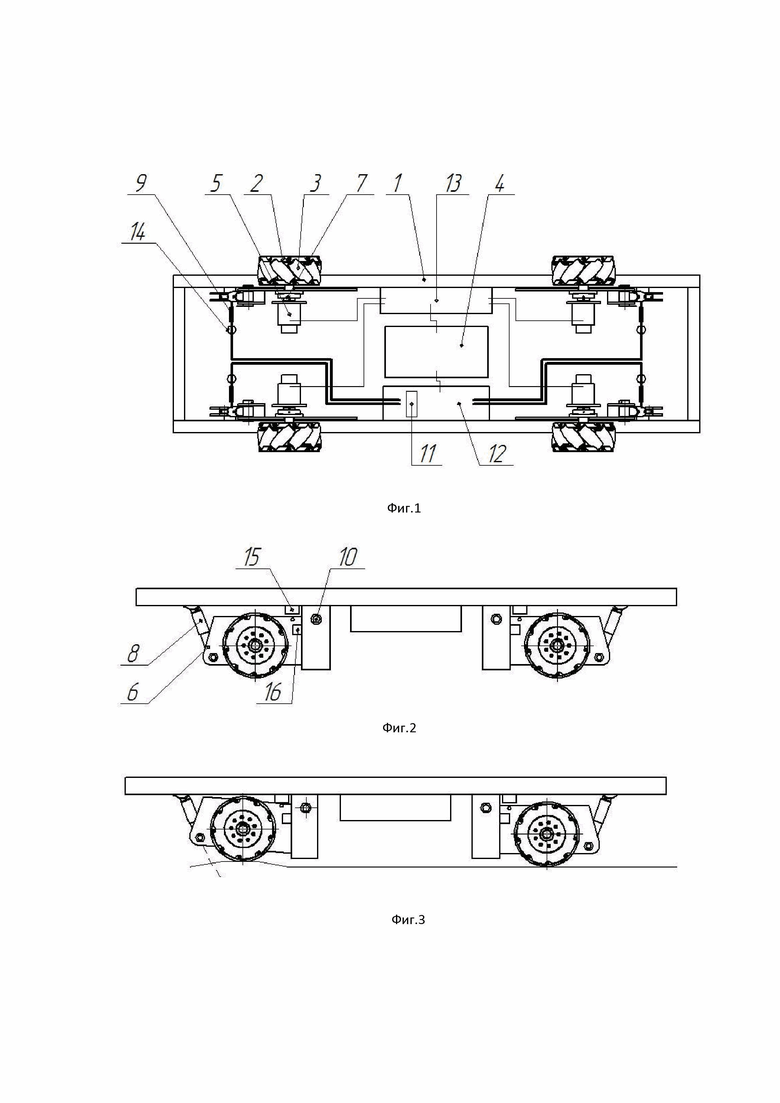
На фигуре 1 представлена схема транспортировочной тележки.
На фигуре 2 представлен вид сбоку транспортировочной тележки.
На фигуре 3 представлена транспортировочная тележка с препятствием под одним колесом, вид сбоку.
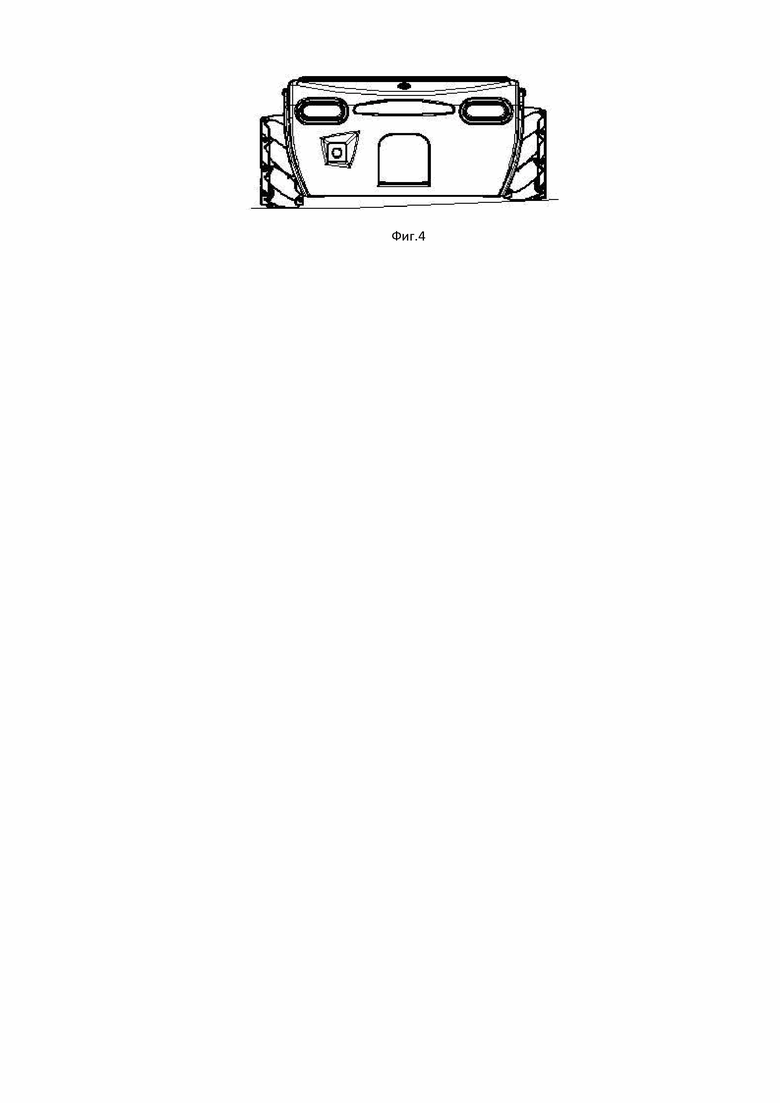
На фигуре 4 представлена транспортировочная тележка с препятствием под одним колесом, вид спереди.
Транспортировочная тележка содержит платформу 1, колесные модули с системами подвесок и роликонесущими колесами 2, содержащими ролики 3, источник электроэнергии в виде аккумулятора 4, связанного с электродвигателем 5 каждого из колес 2. Платформа 1 может быть установлена в раму. Система подвески каждого колеса 2 содержит несущий элемент в виде пластины 6 с закрепленными на ней опорами 7 колес 2, пневмо или гидроцилиндр 8 с электромагнитным клапаном 9, верхние 15 и нижние 16 ограничители хода подвески. Пластина 6 закреплена на опоре с помощью шарнира 10, пневмо/гидроцилиндр 8 шарнирно закреплен на пластине 6. Пневмо/гидроцилиндры 8 каждого колеса 2 связаны с источником давления 12, включающим емкость с рабочим телом 11, которая может быть выполнена в виде гидроаккумулятора или ресивера и связанного с ней элемента создания давления. В качестве элемента создания давления могут использовать гидростанцию или компрессор (не показаны на чертеже). Система управления содержит контроллер 13, связанный с датчиками 14 контроля давления колес 2, которые установлены в системе подвода рабочего тела к пневмо/гидроцилиндрам 8. Контроллер 13 связан с источником давления, электромагнитными клапанами 9 пневмо/гидроцилиндров 8.
Транспортировочная тележка работает следующим образом.
С помощью контроллера 13 управляют включением и движением тележки вручную или с пульта управления. Питание тележки осуществляют от электрической аккумуляторной батареи 4. Сигналы с контроллера 13 передаются на электродвигатели 5 каждого независимого колесного модуля, задают скорость и направление движения каждого колеса 2. За счет того, что используют роликонесущие колеса 2, каждое колесо 2 имеет три степени свободы. Каждое колесо 2 может вращаться вокруг оси колеса, вокруг точки соприкосновения с поверхностью, ролики вращаются вокруг своих осей. Опорные ролики установлены под углом 45° к оси колеса 2. Изменяя направления и скорости движения колес 2, изменяют направление движения тележки без дополнительных рулевых устройств. Для осуществления движения тележки вперед задают движение колес 2 строго в одном направлении. Для разворота тележки на 180° вращают колеса вправо в разных направлениях. Для перемещения тележки в сторону осуществляют вращение передних и задних колес в противоположных направлениях. Подвижность подвески каждого колеса 2 обеспечивается тем, что при помощи пластины 6 колеса 2 крепятся к раме платформы через шарнир 10. Подвеска каждого колеса 2 обеспечивает вертикальное перемещение колеса относительно рамы платформы 1. Применяя независимую, активную подвеску каждого колеса 2, равномерно распределяют нагрузку на все колеса 2 при движении тележки по неровной поверхности. Усилие пневмо/гидроцилиндра 8 на подвески изменяется в зависимости от размеров неровностей поверхности. В случае заезда колеса 2 в яму, происходит уменьшение нагрузки на это колесо, датчик давления 14 в системе подвода рабочего тела передает сигнал на контроллер 13. Контроллер 13 передает сигнал на электромагнитный клапан гидростанции или компрессора источника давления 12, связанный с датчиком давления 14, и на насос гидростанции или компрессора источника давления 12, создается необходимое давление в цилиндре 8 соответствующего колеса 2. Шток этого гидравлического или пневматического цилиндра 8 выдвигается до момента появления заданного, необходимого давления на колесе, которое должно быть равно давлению в других колесах. Происходит равномерное распределение нагрузки на колеса 2. При наезде одного из колес 2 на возвышение возрастает давление на это колесо, датчик 14 этого колеса передает сигнал на контроллер 13. Далее от контроллера 13 сигнал поступает на электромагнитный клапан гидростанции или компрессора источника давления 12, связанный с датчиком давления 14, создается необходимое давление в пневмо/гидроцилиндре 8, его шток втягивается, давление на колесо 2 снижается, происходит уравновешивание давления на все колеса. При этом система активных независимых подвесок обеспечивает горизонтальное положение рамы с платформой 1. При изменении кривизны поверхности пола и общем наклоне платформы 1 с помощью контроллера 13 происходит выдвижение или задвижка штоков пневмо/гидроцилиндров 8 и выравнивание поверхности платформы 1 относительно горизонта.
Кроме того, с помощью контроллера 13 можно обеспечить одновременное и одинаковое изменение положения штоков всех пневмо/гидроцилиндров 8, это обеспечивает равномерное вертикальное поднятие или опускание платформы 1 на заданную высоту. Что позволяет тележке подъезжать под груз и, затем поднимать платформу 1 с грузом не отклоняя поверхность платформы 1 от горизонтали.
Таким образом, изобретение позволяет повысить маневренность транспортировочной тележки при сохранении горизонтального положения платформы, как при криволинейном движении тележки, так и при поднятии-опускании платформы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Омниколесная роботизированная грузовая тележка | 2020 |
|
RU2736553C1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
| МОБИЛЬНЫЙ РОБОТ С АВТОНОМНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454313C2 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО САМОЛЕТОВ | 2005 |
|
RU2299159C1 |
| ЖЕЛЕЗНОДОРОЖНЫЙ КРАН | 2000 |
|
RU2176615C2 |
| КОЛЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2423281C1 |
| ТРАНСПОРТИРОВОЧНОЕ УСТРОЙСТВО САМОЛЕТОВ | 2004 |
|
RU2281887C2 |
| КОЛЁСНО-МОТОРНЫЙ БЛОК ТЕПЛОВОЗА | 2015 |
|
RU2606412C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ С ФУНКЦИЕЙ АКТИВНОЙ ПОДВЕСКИ | 2017 |
|
RU2671661C1 |
| Подвижная перегородка | 2021 |
|
RU2781787C1 |
Изобретение относится к производственным транспортировочным устройствам для перевозки грузов внутри производственных помещений, между производственными площадками. Тележка содержит платформу, источник электроэнергии, систему управления и колесные модули. Каждый колесный модуль содержит роликонесущее колесо, связанное с собственным электродвигателем и собственную систему подвески. Каждая подвеска содержит шарнирно установленный несущий элемент, связанный с опорным узлом роликонесущего колеса, пневмо/гидроцилиндр, одним концом закрепленный на платформе, а вторым - на несущем элементе. Пневмо/гидроцилиндры связаны с общим для всех колесных модулей источником давления. Электромагнитные клапаны пневмо/гидроцилиндров, электродвигатели роликовых колес, датчики давления колес связаны с контроллером системы управления. Изобретение обеспечивает повышение маневренности с сохранением горизонтального положения платформы тележки при ее поступательном и криволинейном движении, при поднятии-опускании платформы. 4 ил.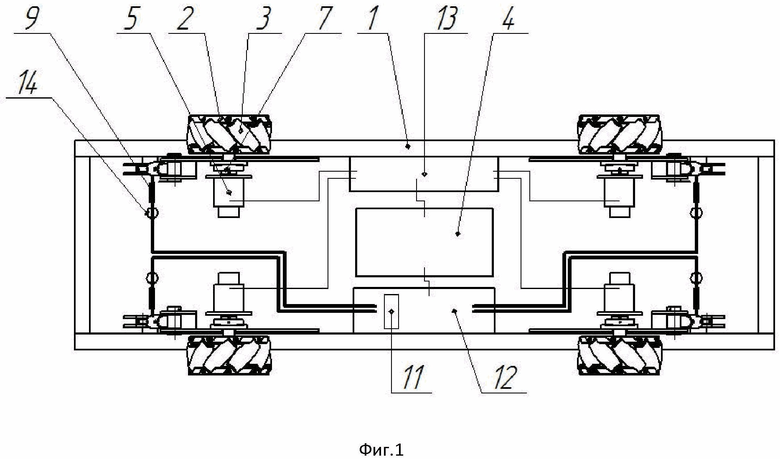
Тележка транспортировочная, содержащая платформу, источник электроэнергии, систему управления, колесные модули, при этом каждый колесный модуль содержит роликонесущее колесо, связанное с собственным электродвигателем, причем электродвигатели связаны с контроллером системы управления, отличающаяся тем, что каждый колесный модуль имеет собственную систему подвески, содержащую шарнирно установленный на раме платформы тележки несущий элемент, пневмо/гидроцилиндр, одним концом закрепленный на платформе, а вторым - на несущем элементе, пневмо/гидроцилиндры связаны с общим для всех колесных модулей источником давления, причем электромагнитные клапаны пневмо/гидроцилиндров и датчики давления, реагирующие на усилие, возникающее в пневмо/гидроцилиндрах при перемещении тележки, связаны с упомянутым контроллером системы управления.
| US 4598782 A, 08.07.1986 | |||
| Гидропневматическая подвеска для транспортного средства | 1990 |
|
SU1791167A1 |
| ТРАНСПОРТНАЯ СИСТЕМА | 2002 |
|
RU2226473C2 |
| Подвеска управляемых колес транспортного средства | 1987 |
|
SU1579833A1 |

