Перекрестные ссылки на родственные заявки
[0001] В настоящей заявке испрашивается приоритет по заявке на патент Японии № 2017-089914, поданной 28 апреля 2017 года в Патентное Ведомство Японии, содержание которой полностью включено сюда путем ссылки.
Уровень техники
[0002] Область техники, к которой относится изобретение
[0003] Варианты осуществления настоящего изобретения относятся к области модуля привода для гибридного транспортного средства, включающего в себя двигатель внутреннего сгорания, первый электромотор и второй электромотор в качестве первичного движителя и передающего движущую силу, выводимую из первичного движителя, в выходной компонент, соединенный с ведущим колесом.
[0004] Предшествующий уровень техники
[0005] Обычно, известен модуль привода для гибридного транспортного средства, в котором мощность, вырабатываемая посредством двигателя, разделяется на сторону первого электромотора, имеющую функцию выработки электрической мощности, и сторону выходного компонента, и движущая сила, сформированная посредством второго электромотора, приводимого в действие посредством электричества, вырабатываемого посредством первого электромотора, суммируется с движущей силой, выводимой из выходного компонента (см., например, патентный документ 1). Этот тип модуля привода для гибридного транспортного средства включает в себя первый планетарный зубчатый механизм, второй планетарный зубчатый механизм, первое устройство муфты и второе устройство муфты. Первый планетарный зубчатый механизм выполняет дифференциальное действие посредством первого входного элемента, в который вводится мощность, вырабатываемая посредством двигателя, первого реактивного элемента, соединенного с первым электромотором, и первого выходного элемента. Второй планетарный зубчатый механизм выполняет дифференциальное действие посредством второго входного элемента, соединенного с первым выходным элементом, второго выходного элемента, соединенного с выходным компонентом для передачи движущей силы на ведущее колесо, и второго реактивного элемента. Первое устройство муфты избирательно соединяет любое из первого входного элемента и первого реактивного элемента и второго реактивного элемента. Второе устройство муфты избирательно соединяет по меньшей мере любые два из вращающихся элементов во втором планетарном зубчатом механизме и вращает как единое целое три вращающихся элемента.
[0006] Модуль привода может задавать гибридный режим движения для движения посредством мощности, вырабатываемой посредством двигателя, посредством включения первого устройства муфты и второго устройства муфты. В гибридном режиме движения, могут задаваться "верхний" режим, в котором частота вращения выходного компонента на основе частоты вращения двигателя является относительно высокой, и "нижний" режим, в котором частота вращения выходного компонента является относительно низкой. "Верхний" режим задается посредством зацепления первого устройства муфты и посредством расцепления второго устройства муфты. "Нижний" режим задается посредством расцепления первого устройства муфты и посредством зацепления второго устройства муфты. Посредством зацепления первого устройства муфты и второго устройства муфты между собой, задается режим прямого соединения, в котором частота вращения двигателя становится равной частоте вращения выходного компонента (синхронной частоте вращения). Таким образом, в режиме прямого соединения, передаточное отношение становится равным 1.
[0007] Фиг. 45 показывает пример теоретической эффективности трансмиссии, когда модуль привода задается в "верхний" режим и "нижний" режим. На фиг. 45, поперечная ось указывает передаточное отношение, тогда как вертикальная ось указывает теоретическую эффективность трансмиссии (стехиометрическую эффективность передачи мощности). Передаточное отношение составляет отношение частоты вращения первого входного элемента относительно частоты вращения второго выходного элемента планетарного зубчатого механизма. На поперечной оси, левая сторона указывает сторону верхней передачи с меньшим передаточным отношением, тогда как правая сторона указывает сторону нижней передачи с большим передаточным отношением. Теоретическая эффективность трансмиссии составляет соотношение между входной мощностью в планетарный зубчатый механизм и выходной мощностью и получается посредством теоретического вычисления при условии, что механические потери, такие как трение, равны нулю, и преобразование между электричеством и мощностью является потерями. Относительно теоретической эффективности трансмиссии, максимальная эффективность составляет 1,0, когда вращение первого электромотора равно нулю, и вся мощность двигателя передается в выходной компонент.
[0008] Кривая, указываемая посредством сплошной линии на фиг. 45, представляет собой линию 90 теоретической эффективности трансмиссии, когда задается "верхний" режим. Кривая, указываемая посредством пунктирной линии, представляет собой линию 91 теоретической эффективности трансмиссии, когда задается "нижний" режим. Линия 90 теоретической эффективности трансмиссии в "верхнем" режиме имеет точку 90c максимальной эффективности (механическую точку) при передаточном отношении γ3. Механическая точка представляет собой эффективность, когда мощность передается в выходной компонент из двигателя, когда частота вращения первого электромотора (первого реактивного элемента) равна нулю. Линия 91 теоретической эффективности трансмиссии в "нижнем" режиме имеет механическую точку 91c при передаточном отношении γ4.
[0009] Патентный документ 1 описывает вариант осуществления, в котором, когда задаются "верхний" режим и "нижний" режим, возникает повышающая передача (с передаточным отношением в 1 или меньше), при которой частота вращения выходного компонента становится выше частоты вращения двигателя. В качестве примера, передаточное отношение γ3 в механической точке в "верхнем" режиме становится "1/(1+ρ1+ρ1*ρ2)". Здесь, "ρ1" представляет собой передаточное отношение в первом планетарном зубчатом механизме (отношение между числом зубьев коронной шестерни, которая представляет собой первый выходной элемент, и числом зубьев солнечной шестерни, которая представляет собой первый реактивный элемент), и "ρ2" представляет собой передаточное отношение во втором планетарном зубчатом механизме (отношение между числом зубьев коронной шестерни, которая представляет собой второй выходной элемент, и числом зубьев солнечной шестерни, которая представляет собой второй реактивный элемент). Таким образом, передаточное отношение γ3 представляет собой передаточное отношение, меньшее передаточного отношения в 1. В случае этого примера, передаточное отношение γ4 в механической точке в "нижнем" режиме становится "1/(1+ρ1)". Таким образом, передаточное отношение γ4 представляет собой передаточное отношение, меньшее передаточного отношения в 1 и большее передаточного отношения γ3. Теоретическая эффективность трансмиссии, когда задается режим прямого соединения, становится механической точкой 92, когда передаточное отношение равно 1.
[0010] Модуль привода управляет частотой вращения двигателя посредством выходного крутящего момента первого электромотора таким образом, что может быть реализовано приведение в движение с предпочтительной эффективностью использования топлива. Передаточное отношение непрерывно изменяется на основе частоты вращения двигателя, аналогично транспортному средству, в котором монтируется бесступенчатая трансмиссия. Таким образом, посредством управления выходным крутящим моментом первого электромотора на основе величины нажатия на педаль акселератора, частота вращения двигателя увеличивается/снижается. Передаточное отношение непрерывно изменяется со стороны нижней передачи на сторону верхней передачи, показанную на фиг. 45, чтобы понижать частоту вращения двигателя на основе снижения величины нажатия (снижения в запросе на движущую силу) педали акселератора водителем. В это время, рабочие режимы в "нижнем" режиме, режиме прямого соединения и "верхнем" режиме переключаются в режим с более высокой теоретической эффективностью трансмиссии.
[0011] В частности, в случае стороны нижней передачи с передаточным отношением, большим 1, линия 91 теоретической эффективности трансмиссии в "нижнем" режиме имеет более высокую эффективность, чем линия 90 теоретической эффективности трансмиссии в "верхнем" режиме, и в силу этого модуль привода задается в "нижний" режим. По мере того, как частота вращения двигателя увеличивается в состоянии, в котором задается "нижний" режим, передаточное отношение изменяется к стороне верхней передачи. Таким образом, теоретическая эффективность трансмиссии изменяется вдоль линии 91a теоретической эффективности трансмиссии в "нижнем" режиме. После этого, по мере того, как передаточное отношение приближается к 1, чтобы переключаться в режим прямого соединения, выполняется управление переключением операций зацепления устройств муфты посредством синхронизации частоты вращения первого входного элемента и частоты вращения второго выходного элемента. Как результат, в момент времени, когда теоретическая эффективность трансмиссии изменяется вдоль линии 92a теоретической эффективности трансмиссии в режиме прямого соединения и переключается в режим прямого соединения, теоретическая эффективность трансмиссии изменяется на механическую точку 92, в которой теоретическая эффективность трансмиссии становится максимальной эффективностью. После этого, по мере того, как частота вращения двигателя увеличивается, посредством управления частотой вращения первого электромотора, передаточное отношение изменяется на сторону верхней передачи. Когда передаточное отношение изменяется с передаточного отношения в 1 в механической точке 92 на сторону верхней передачи, линия 91 теоретической эффективности трансмиссии в "нижнем" режиме в итоге имеет более высокую эффективность, чем линия 90 теоретической эффективности трансмиссии в "верхнем" режиме. Таким образом, модуль привода переключается из режима прямого соединения в "нижний" режим снова.
[0012] Когда модуль привода задается в "нижний" режим, теоретическая эффективность трансмиссии изменяется вдоль линии 91b теоретической эффективности трансмиссии в "нижнем" режиме, и теоретическая эффективность трансмиссии становится механической точкой 91c в "нижнем" режиме, когда передаточное отношение становится γ4. После этого, по мере того, как частота вращения двигателя повышается, передаточное отношение изменяется на сторону верхней передачи. Когда передаточное отношение превышает передаточное отношение γ5 (γ3<γ5<γ4) на стороне верхней передачи, линия 90 теоретической эффективности трансмиссии в "верхнем" режиме становится выше линии 91 теоретической эффективности трансмиссии в "нижнем" режиме. Таким образом, когда передаточное отношение становится передаточным отношением γ5 или превышает передаточное отношение γ5, модуль привода переключается из "нижнего" режима в "верхний" режим. В это время, управление синхронным вращением выполняется, и операция зацепления устройства муфты переключается. Таким образом, теоретическая эффективность трансмиссии временно возвращается к эффективности на линии 92a теоретической эффективности трансмиссии в режиме прямого соединения через линии 91c и 91b эффективности трансмиссии в "нижнем" режиме. После этого, после того, как операция зацепления устройства муфты завершается, теоретическая эффективность трансмиссии изменяется на эффективность на линии 90b теоретической эффективности трансмиссии в "верхнем" режиме через линию 90a теоретической эффективности трансмиссии в "верхнем" режиме. После этого, по мере того, как частота вращения двигателя снижается, теоретическая эффективность трансмиссии изменяется вдоль механической точки 90c в "верхнем" режиме и линии 90d теоретической эффективности трансмиссии в "верхнем" режиме.
[0013] Относительно теоретической эффективности трансмиссии в гибридном режиме, в котором задается модуль привода, описанный выше, механическая точка 92 в режиме прямого соединения присутствует в позиции на стороне нижней передачи на большом расстоянии от механической точки 91c в "нижнем" режиме и механической точки 90c в "верхнем" режиме. Таким образом, рабочее состояние модуля привода должно проходить через режим прямого соединения однократно при переключении между "нижним" режимом и "верхним" режимом, и в силу этого он проходит через область 94 (заштрихованную область), в которой теоретическая эффективность трансмиссии понижается. Таким образом, рабочее состояние модуля привода не изменяется таким образом, что оно проходит через рабочую точку с хорошей теоретической эффективностью трансмиссии. Таким образом, возникает такая проблема, что эффективность использования топлива понижается. Таким образом, имеется запас для улучшения при повышении эффективности использования топлива в гибридном движении в традиционном модуле привода для гибридного транспортного средства.
[0014] В рабочем состоянии модуля привода, описанного выше, при переключении между "нижним" режимом и "верхним" режимом, управление синхронным вращением выполняется таким образом, что первое устройство муфты и второе устройство муфты переводятся в зацепленное состояние, и режим переключается в режим прямого соединения, и после этого любое из устройств муфты расцепляется, и режим переключается в любой из "нижнего" режима и "верхнего" режима в некоторых случаях. В этом случае, при переключении между "нижним" режимом и "верхним" режимом, поскольку выполняется прохождение через режим прямого соединения с передаточным отношением в 1, передаточное отношение временно изменяется на сторону нижней передачи. Таким образом, передаточное отношение временно изменяется в направлении, противоположном направлению изменения передаточного отношения при переключении "вверх", и в силу этого возникает такое явление, что частота вращения двигателя резко возрастает или падает, например, что плохо влияет общую характеристику управляемости в некоторых случаях. Таким образом, в традиционном модуле привода для гибридного транспортного средства, имеется запас для улучшения при улучшении общей характеристики управляемости в гибридном движении.
[0015] Во избежание ухудшения общей характеристики управляемости во время гибридного движения, посредством использования устройства многодисковой мокрой муфты, может рассматриваться выполнение межмуфтового управления, в котором в состоянии, в котором управление синхронным вращением не выполняется, т.е. в состоянии, в котором разность частот вращения между частотой вращения элемента на входной стороне и частотой вращения элемента на выходной стороне устройства муфты является большой, устройство муфты на расцепленной стороне зацепляется, и устройство муфты на зацепленной стороне расцепляется. Тем не менее, в этом случае, потери на трение устройства муфты увеличиваются, и эффективность трансмиссии ухудшается. Кроме того, изменение вращения первого электромотора увеличивается, и величина доставки электричества между первым электромотором и аккумулятором увеличивается, и в силу этого электрические потери становятся большими.
Сущность изобретения
[0016] Аспекты настоящего изобретения задуманы с учетом вышеприведенных технических проблем, и в силу этого цель настоящей заявки заключается в том, чтобы предоставлять модуль привода для гибридного транспортного средства для повышения эффективности использования топлива в ходе приведения в движение в гибридном режиме при улучшении общей характеристики управляемости.
[0017] Модуль привода согласно варианту осуществления настоящего изобретения применяется к гибридному транспортному средству, в котором первичный движитель включает в себя двигатель, первый электромотор и второй электромотор, и в котором движущая сила, сформированная посредством первичного движителя, передается в выходной компонент, соединенный с ведущим колесом. Чтобы достигать цели, модуль привода содержит: первый блок дифференциала, включающий в себя первый вращательный элемент, с которым соединяется двигатель, второй вращательный элемент, с которым соединяется первый электромотор, и третий вращательный элемент; второй блок дифференциала, включающий в себя четвертый вращательный элемент, с которым соединяется выходной компонент, пятый вращательный элемент, соединенный с третьим вращательным элементом, и шестой вращательный элемент; первое зацепляющее устройство, которое зацепляется, чтобы избирательно соединять любые два из четвертого вращательного элемента, пятого вращательного элемента и шестого вращательного элемента; и второе зацепляющее устройство зацепляется, чтобы избирательно соединять первый вращательный элемент или второй вращательный элемент с шестым вращательным элементом. В модуле привода, первый режим, в котором соотношение частот вращения между двигателем и выходным компонентом становится первым соотношением, меньшим 1, устанавливается посредством зацепления любого из первого зацепляющего устройства и второго зацепляющего устройства при расцеплении другого зацепляющего устройства, и второй режим, в котором соотношение частот вращения становится вторым соотношением, большим 1, устанавливается посредством зацепления упомянутого другого зацепляющего устройства при расцеплении упомянутого одного из зацепляющих устройств.
[0018] В неограничивающем варианте осуществления, модуль привода дополнительно может содержать: детектор, который определяет по меньшей мере одно из скорости транспортного средства и запрашиваемой движущей силы; и контроллер, который управляет двигателем, первым электромотором, вторым электромотором, первым зацепляющим устройством и вторым зацепляющим устройством. В частности, контроллер может быть выполнен с возможностью: установки первого режима по меньшей мере в одном из случаев, в которых скорость транспортного средства выше заданной скорости, и в которых запрашиваемая движущая сила не выше заданной силы, и установки второго режима по меньшей мере в одном из случаев, в которых скорость транспортного средства ниже заданной скорости, и в которых запрашиваемая движущая сила превышает заданную силу.
[0019] В неограничивающем варианте осуществления, первый режим может включать в себя состояние, в котором мощность двигателя передается в выходной компонент посредством уменьшения частоты первого электромотора до нуля, когда соотношение частот вращения представляет собой первое соотношение, меньшее 1, и второй режим может включать в себя состояние, в котором мощность двигателя передается в выходной компонент, уменьшающая частоту первого электромотора до нуля, когда соотношение частот вращения представляет собой второе передаточное отношение, большее 1. Помимо этого, может задаваться третье состояние, в котором соотношение частот вращения равно 1, когда первое зацепляющее устройство и второе зацепляющее устройство находятся в зацепленном состоянии. Модуль привода дополнительно может содержать контроллер, который управляет двигателем, первым электромотором, вторым электромотором, первым зацепляющим устройством и вторым зацепляющим устройством. Помимо этого, контроллер может быть выполнен с возможностью выбирать первый режим, когда соотношение частот вращения меньше 1, выбирать второй режим, когда соотношение частот вращения превышает 1, и выбирать третье состояние, когда соотношение частот вращения равно 1.
[0020] В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью: установки первого режима посредством расцепления первого зацепляющего устройства при зацеплении второго зацепляющего устройства; и установки второго режима посредством зацепления первого зацепляющего устройства при расцеплении второго зацепляющего устройства.
[0021] В неограничивающем варианте осуществления, контроллер может быть дополнительно выполнен с возможностью: установки первого режима посредством зацепления первого зацепляющего устройства при расцеплении второго зацепляющего устройства; и установки второго режима посредством расцепления первого зацепляющего устройства при зацеплении второго зацепляющего устройства.
[0022] В неограничивающем варианте осуществления, первое зацепляющее устройство и второе зацепляющее устройство могут включать в себя кулачковую муфту, в которой крутящий момент передается посредством зацепления первых зубьев, предусмотренных на элементе на входной стороне, со вторыми зубьями, предусмотренными на элементе на выходной стороне. Помимо этого, контроллер может быть дополнительно выполнен с возможностью зацепления кулачковой муфты, расцепленной перед переключением частоты вращения, и расцеплять кулачковую муфту, зацепленную перед переключением частоты вращения, если разность частот вращения между двигателем и выходным компонентом не превышает заданное значение при переключении между первым режимом и вторым режимом.
[0023] В неограничивающем варианте осуществления, первое зацепляющее устройство и второе зацепляющее устройство могут включать в себя фрикционную муфту, имеющую вращающийся элемент на входной стороне, к которому прикладывается движущий крутящий момент, и вращающийся элемент на выходной стороне для вывода движущего крутящего момента. Помимо этого, контроллер может быть дополнительно выполнен с возможностью параллельного выполнения первого управления для того, чтобы уменьшать перегрузочную способность по передаче крутящего момента фрикционной муфты, зацепленной перед переключением частоты вращения, и второго управления для того, чтобы увеличивать перегрузочную способность по передаче крутящего момента фрикционной муфты, расцепленной перед переключением частоты вращения, при переключении между первым режимом и вторым режимом.
[0024] В неограничивающем варианте осуществления, модуль привода дополнительно может содержать тормозное устройство, избирательно соединяющее первый вращательный элемент и заданный закрепленный элемент.
[0025] В неограничивающем варианте осуществления, второе зацепляющее устройство может быть выполнено с возможностью избирательно соединять первый вращательный элемент и шестой вращательный элемент.
[0026] В неограничивающем варианте осуществления, первое зацепляющее устройство может быть выполнено с возможностью избирательно соединять четвертый вращательный элемент и шестой вращательный элемент.
[0027] В неограничивающем варианте осуществления, первый блок дифференциала и второй блок дифференциала могут включать в себя планетарный зубчатый механизм, имеющий солнечную шестерню, коронную шестерню и водило.
[0028] В неограничивающем варианте осуществления, первый блок дифференциала и второй блок дифференциала могут иметь такую конструкцию, что на номографической схеме, второй вращательный элемент, четвертый вращательный элемент, первый вращательный элемент и третий вращательный элемент или пятый вращательный элемент совмещаются в порядке второго вращательного элемента, четвертого вращательного элемента, первого вращательного элемента и третьего вращательного элемента или пятого вращательного элемента.
[0029] Таким образом, согласно варианту осуществления настоящего изобретения, первый режим, в котором соотношение частот вращения между двигателем и выходным компонентом составляет первое передаточное отношение, меньшее 1, устанавливается посредством зацепления любого из первого зацепляющего устройства и второго зацепляющего устройства при расцеплении другого зацепляющего устройства, и второй режим, в котором соотношение частот вращения становится вторым соотношением, большим 1, устанавливается посредством зацепления упомянутого другого зацепляющего устройства при расцеплении упомянутого одного из зацепляющих устройств. В силу этого, согласно варианту осуществления, первое соотношение частот вращения и второе соотношение частот вращения первого режима и второго режима задаются через соотношение частот вращения в 1, соответственно, когда первый режим и второй режим переключаются относительно друг друга. По этой причине, рабочей точке разрешается переключаться теоретически эффективным способом, за счет этого повышая эффективность использования топлива и общую характеристику управляемости.
Краткое описание чертежей
[0030] Признаки, аспекты и преимущества примерных вариантов осуществления настоящего изобретения должны лучше пониматься со ссылкой на нижеприведенное описание и прилагаемые чертежи, которые не должны ограничивать изобретение каким-либо образом.
[0031] Фиг. 1 является блок-схемой, концептуально показывающей пример модуля привода, используемого для гибридного транспортного средства, представляющего собой цель варианта осуществления настоящего изобретения;
[0032] Фиг. 2 является схематичным видом, показывающим модуль привода первого варианта осуществления;
[0033] Фиг. 3 является пояснительным видом, показывающим пример рабочего режима, в котором задается модуль привода, показанный на фиг. 2;
[0034] Фиг. 4 является номографической схемой, показывающей рабочее состояние первого режима, показанного на фиг. 3;
[0035] Фиг. 5 является номографической схемой, показывающей рабочее состояние второго режима, показанного на фиг. 3;
[0036] Фиг. 6 является номографической схемой, показывающей рабочее состояние третьего режима, показанного на фиг. 3;
[0037] Фиг. 7 является номографической схемой, показывающей рабочее состояние четвертого режима, показанного на фиг. 3;
[0038] Фиг. 8 является номографической схемой, показывающей рабочее состояние пятого режима, показанного на фиг. 3;
[0039] Фиг. 9 является пояснительным видом, показывающим пример области движения, для которой задается режим HV-движения, показанный на фиг. 3;
[0040] Фиг. 10 является пояснительным видом, показывающим пример теоретической эффективности трансмиссии, для которой задаются первый режим и третий режим;
[0041] Фиг. 11 является пояснительным видом, показывающим переход номографической схемы, показывающей рабочее состояние, когда третий режим переключается на первый режим, когда первое устройство муфты и второе устройство муфты представляют собой устройства фрикционной муфты;
[0042] Фиг. 12 является пояснительным видом, показывающим изменение частот вращения первого электромотора, двигателя и выходного компонента, соответствующее переходу рабочего режима, показанного на фиг. 11;
[0043] Фиг. 13 является блок-схемой последовательности операций способа, показывающей управляющую процедуру HV_ECU, когда третий режим переключается на первый режим, показанный на фиг. 11;
[0044] Фиг. 14 является временной диаграммой, показывающей пример гидравлического давления муфты, когда третий режим переключается на первый режим, показанный на фиг. 11;
[0045] Фиг. 15 является схематичным видом, показывающим кулачковую муфту, которая представляет собой пример устройства муфты зубчатого типа;
[0046] Фиг. 16 является пояснительным видом, показывающим переход номографической схемы, показывающей рабочее состояние, когда третий режим переключается на первый режим, когда устройство муфты зубчатого типа используется для первого устройства CL1 муфты и второго устройства CL2 муфты;
[0047] Фиг. 17 является пояснительным видом, показывающим пример изменения частоты вращения первого электромотора, двигателя и выходного компонента, соответствующего переходу рабочего режима, показанного на фиг. 16;
[0048] Фиг. 18 является блок-схемой последовательности операций способа, показывающей пример процедуры управления HV_ECU, когда третий режим переключается на первый режим, показанный на фиг. 16;
[0049] Фиг. 19 является пояснительным видом, показывающим переход номографической схемы, показывающей рабочее состояние, когда первый режим переключается на третий режим, когда устройство муфты зубчатого типа используется для первого устройства CL1 муфты и второго устройства CL2 муфты;
[0050] Фиг. 20 является пояснительным видом, показывающим изменение частот вращения первого электромотора, двигателя и выходного компонента, соответствующее переходу рабочего режима, показанного на фиг. 19;
[0051] Фиг. 21 является блок-схемой последовательности операций способа, показывающей пример процедуры управления HV_ECU, когда первый режим переключается на третий режим, показанный на фиг. 19;
[0052] Фиг. 22 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода во втором варианте осуществления;
[0053] Фиг. 23 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в третьем варианте осуществления;
[0054] Фиг. 24 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в четвертом варианте осуществления;
[0055] Фиг. 25 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в пятом варианте осуществления;
[0056] Фиг. 26 является пояснительным видом, показывающим пример рабочего режима, в котором задается модуль привода, показанный на фиг. 25;
[0057] Фиг. 27 является номографической схемой, показывающей рабочее состояние во втором режиме модуля привода, показанного на фиг. 25;
[0058] Фиг. 28 является номографической схемой, показывающей рабочее состояние в третьем режиме модуля привода, показанного на фиг. 25;
[0059] Фиг. 29 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в шестом варианте осуществления;
[0060] Фиг. 30 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в седьмом варианте осуществления;
[0061] Фиг. 31 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в восьмом варианте осуществления;
[0062] Фиг. 32 является пояснительным видом, концептуально показывающим модуль привода другого варианта осуществления настоящего изобретения;
[0063] Фиг. 33 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в девятом варианте осуществления;
[0064] Фиг. 34 является номографической схемой, показывающей рабочее состояние во втором режиме модуля привода, показанного на фиг. 33;
[0065] Фиг. 35 является номографической схемой, показывающей рабочее состояние в третьем режиме модуля привода, показанного на фиг. 33;
[0066] Фиг. 36 является номографической схемой, показывающей рабочее состояние в четвертом режиме модуля привода, показанного на фиг. 33;
[0067] Фиг. 37 является номографической схемой, показывающей рабочее состояние в пятом режиме модуля привода, показанного на фиг. 33;
[0068] Фиг. 38 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в десятом варианте осуществления;
[0069] Фиг. 39 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в одиннадцатом варианте осуществления;
[0070] Фиг. 40 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в двенадцатом варианте осуществления;
[0071] Фиг. 41 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в тринадцатом варианте осуществления;
[0072] Фиг. 42 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в четырнадцатом варианте осуществления;
[0073] Фиг. 43 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в пятнадцатом варианте осуществления;
[0074] Фиг. 44 является номографической схемой, показывающей рабочее состояние в первом режиме модуля привода в шестнадцатом варианте осуществления; и
[0075] Фиг. 45 является пояснительным видом, показывающим пример теоретической эффективности трансмиссии модуля привода, описанного в предшествующем уровне техники.
Подробное описание предпочтительных вариантов осуществления изобретения
[0076] Фиг. 1 концептуально показывает пример модуля 10 привода, используемого в гибридном транспортном средстве (в дальнейшем называемом "транспортным средством"), представляющем собой цель варианта осуществления настоящего изобретения. Как показано на фиг. 1, модуль 10 привода включает в себя двигатель 11 (ENG), первый электромотор 12 (MG1), второй электромотор 13 (MG2), первый планетарный зубчатый механизм 14 (PL1), который представляет собой пример первого блока дифференциала, второй планетарный зубчатый механизм 15 (PL2), который представляет собой пример второго блока дифференциала, выходной компонент 16 (OUT), первое устройство CL1 муфты, второе устройство CL2 муфты, тормозное устройство BK, PCU 20 (модуль управления мощностью), гидравлический контроллер 21, HV_ECU 22 (электронный модуль управления), ENG_ECU 23, MG_ECU 24 и аккумулятор 33. Аккумулятор 33 включает в себя электрическое накопительное устройство, к примеру, аккумуляторную батарею, и конденсатор. Двигатель 11 соответствует двигателю внутреннего сгорания. Двигатель 11, первый электромотор 12 и второй электромотор 13 представляют собой примеры первичного движителя. Транспортное средство, включающее в себя первичный движитель, может представлять собой гибридное транспортное средство со штепсельным соединением для заряда от внешнего источника, допускающее заряд посредством внешнего источника мощности.
[0077] Первый электромотор 12 сконструирован посредством электромотора-генератора, имеющего функцию выработки электрической мощности. Модуль 10 привода может составлять рабочий режим, в котором второй электромотор 13 приводится в действие посредством использования электричества, вырабатываемого посредством первого электромотора 12, и движущая сила, сформированная посредством второго электромотора 13, используется в качестве движущей силы для движения. Второй электромотор 13 сконструирован посредством электромотора-генератора, имеющего функцию выработки электрической мощности.
[0078] Первый планетарный зубчатый механизм 14 выполняет дифференциальное действие посредством первого вращательного элемента 25, в который вводится крутящий момент, сформированный посредством двигателя 11, второго вращательного элемента 26, соединенного с выходным компонентом 16, и третьего вращательного элемента 27. Второй планетарный зубчатый механизм 15 выполняет дифференциальное действие посредством четвертого вращательного элемента 28, соединенного с первым электромотором 12, пятого вращательного элемента 29, соединенного с третьим вращательным элементом 27, и шестого вращательного элемента 30.
[0079] Первое устройство CL1 муфты интегрирует весь второй планетарный зубчатый механизм 15 и может быть сконструировано с возможностью соединять по меньшей мере любые два из вращательных элементов, такие как четвертый вращательный элемент 28 и шестой вращательный элемент 30 либо пятый вращательный элемент 29 или шестой вращательный элемент 30 и пятый вращательный элемент 29 между собой. В варианте осуществления, показанном на фиг. 1, первое устройство CL1 муфты избирательно соединяет четвертый вращательный элемент 28 и шестой вращательный элемент 30.
[0080] Второе устройство CL2 муфты предоставляется таким образом, что посредством избирательного соединения вращательных элементов первого планетарного зубчатого механизма 14 и второго планетарного зубчатого механизма 15, эти два планетарных зубчатых механизма 14, 15 составляют так называемый сложный планетарный зубчатый механизм 17 из четырех элементов, и может представлять собой такую конструкцию, в которой шестой вращательный элемент 30 избирательно соединяется с первым вращательным элементом 25 или вторым вращательным элементом 26. В варианте осуществления, показанном на фиг. 1, второе устройство CL2 муфты избирательно соединяет шестой вращательный элемент 30 и первый вращательный элемент 25. Сложный планетарный зубчатый механизм 17 представляет собой пример сложного блока дифференциала в варианте осуществления настоящего изобретения.
[0081] Тормозное устройство BK предоставляется между первым вращательным элементом 25 и закрепленным элементом 32 и избирательно соединяет первый вращательный элемент 25 и закрепленный элемент 32. В варианте осуществления настоящего изобретения, тормозное устройство BK может опускаться.
[0082] Первое устройство CL1 муфты может представлять собой устройство фрикционной муфты, имеющее фрикционный диск на входной стороне, в который вводится движущий крутящий момент, и фрикционный диск на выходной стороне для вывода движущего крутящего момента, так что фрикционный диск на входной стороне и фрикционный диск на выходной стороне приводятся в контакт, например, посредством гидравлического давления. Второе устройство CL2 муфты может представлять собой модуль, который является идентичным или аналогичным первому устройству CL1 муфты. Тормозное устройство BK может представлять собой фрикционное тормозное устройство, в котором фрикционный диск, в который движущий крутящий момент передается посредством гидравлического давления, и который вращается, и заданный закрепленный диск приводятся в контакт. Гидравлический контроллер 21 отдельно управляет гидравлическим давлением, которое должно подаваться в первое устройство CL1 муфты, второе устройство CL2 муфты и тормозное устройство BK в соответствии со значением команды управления, выводимым из HV_ECU 22, с тем чтобы непрерывно изменять соответствующую перегрузочную способность по передаче крутящего момента.
[0083] Зацепляющее устройство, включающее в себя первое устройство CL1 муфты, второе устройство CL2 муфты и тормозное устройство BK, может представлять собой устройство муфты зубчатого типа, такое как кулачковая муфта.
[0084] С HV_ECU 22, соответственно, соединяются датчик 34 скорости транспортного средства, датчик 35 открытия акселератора, датчик 36 частоты вращения MG1, датчик 37 частоты вращения MG2, датчик 38 частоты вращения выходного вала и датчик 31 заряда аккумулятора. Таким образом, в HV_ECU 22, вводится такая информация, как открытие акселератора, соответствующее нажатию педали акселератора, скорость транспортного средства, частота вращения выходного вала первого электромотора 12, частота вращения выходного вала второго электромотора 13, частота вращения выходного компонента 16, уровень заряда (SOC) аккумулятора 33 и т.п. HV_ECU 22 выводит управляющие сигналы в гидравлический контроллер 21, ENG_ECU 23 и MG_ECU 24, чтобы управлять двигателем 11, первым электромотором 12 и вторым электромотором 13 и т.п. на основе информации. ENG_ECU 23 управляет двигателем 11 и т.п. на основе управляющего сигнала, отправляемого посредством HV_ECU 22. MG_ECU 24 управляет PCU 20 на основе управляющего сигнала, отправляемого посредством HV_ECU 22.
[0085] PCU 20 включает в себя преобразователь 39 и инвертор 40 для выполнения обмена мощностью между аккумулятором 33 и первым электромотором 12, а также вторым электромотором 13. Таким образом, PCU 20 выполняет управление для подачи мощности для приведения в действие в первый электромотор 12 и второй электромотор 13 и для накопления мощности, вырабатываемой посредством первого электромотора 12 и второго электромотора 13, в аккумуляторе 33. ENG_ECU 23 управляет работой двигателя 11.
[0086] Первый вариант осуществления
Фиг. 2 показывает модуль 10A привода в качестве примера, который дополнительно осуществляет модуль 10 привода, показанный на фиг. 1. Как показано на фиг. 2, модуль 10A привода имеет многовальный тип, включающий в себя двигатель 11, первый электромотор 12, второй электромотор 13, первый планетарный зубчатый механизм 14 (PL1), второй планетарный зубчатый механизм 15 (PL2), первое устройство CL1 муфты, второе устройство CL2 муфты, тормозное устройство BK, дифференциальный редуктор 47, ведущее колесо 53 и т.п. и имеющий входной вал 42 первого планетарного зубчатого механизма 14 и второго планетарного зубчатого механизма 15 и ротор 49 второго электромотора 13, размещаемые на различных валах. Модуль 10A привода, показанный на фиг. 2, представляет собой пример, сконструированный таким образом, что он является подходящим для так называемого транспортного средства с поперечным расположением двигателя, в котором двигатель 11 размещается в направлении ширины транспортного средства, такого как транспортное средство с передним приводом и с передним расположением двигателя (транспортное FF-средство) или транспортное средство с задним приводом и с задним расположением двигателя (транспортное RR-средство). В частности, первый электромотор 12 размещается на одной стороне в направлении ширины транспортного средства относительно двигателя 11, и первое устройство CL1 муфты и второе устройство CL2 муфты размещаются между первым электромотором 12 и двигателем 11.
[0087] Как показано на фиг. 2, первый планетарный зубчатый механизм 14 представляет собой планетарный зубчатый механизм с сателлитами одного типа и выполняет дифференциальное действие посредством трех вращательных элементов, т.е. первой солнечной шестерни S1, первого водила C1 и первой коронной шестерни R1. Первая солнечная шестерня S1 представляет собой шестерню внешнего зацепления. Первая коронная шестерня R1 представляет собой шестерню внутреннего зацепления, размещаемую на концентрической окружности относительно первой солнечной шестерни S1. Первое водило C1 поддерживает первые сателлитные шестерни P1, приводимые в зубчатое зацепление с первой солнечной шестерней S1 и первой коронной шестерней R1.
[0088] Движущая сила, сформированная посредством двигателя 11, доставляется в первое водило C1. В частности, входной вал 42, соединенный с выходным валом 41 двигателя 11, соединяется с первым водилом C1. Вместо конструкции, в которой первое водило C1 и входной вал 42 непосредственно соединяются, первое водило C1 и входной вал 42 могут соединяться через блок трансмиссии, такой как зубчатый механизм. Кроме того, демпферный блок или преобразователь крутящего момента и т.п. может размещаться между выходным валом 41 и входным валом 42. Первая солнечная шестерня S1 соединяется с ротором 43 первого электромотора 12. Первый планетарный зубчатый механизм 14 размещается на оси Cnt, идентичной оси выходного вала 41 двигателя 11. Первое водило C1 представляет собой пример первого вращательного элемента 25, и первая солнечная шестерня S1 представляет собой пример второго вращательного элемента 26, и кроме того, первая коронная шестерня R1 представляет собой пример третьего вращательного элемента 27.
[0089] Второй планетарный зубчатый механизм 15 сконструирован посредством планетарного зубчатого механизма с сателлитами одного типа и выполняет дифференциальное действие посредством трех вращательных элементов, т.е. второй солнечной шестерни S2, второго водила C2 и второй коронной шестерни R2. Вторая коронная шестерня R2 представляет собой шестерню внутреннего зацепления, размещаемую концентрически относительно второй солнечной шестерни S2, и соединяется с выходным компонентом 16. Вторая солнечная шестерня S2 представляет собой шестерню внешнего зацепления и соединяется с первой коронной шестерней R1. Второе водило C2 поддерживает вторые сателлитные шестерни P2, приводимые в зубчатое зацепление со второй солнечной шестерней S2 и второй коронной шестерней R2. Вторая коронная шестерня R2 представляет собой пример четвертого вращательного элемента 28, и вторая солнечная шестерня S2 представляет собой пример пятого вращательного элемента 29, и кроме того, второе водило C2 представляет собой пример шестого вращательного элемента 30.
[0090] Первое устройство CL1 муфты переключается между зацепленным состоянием, в котором второе водило C2 и вторая коронная шестерня R2 соединяются, и расцепленным состоянием, в котором зацепленное состояние прекращается. Первое устройство CL1 муфты в этом варианте осуществления представляет собой пример первого зацепляющего устройства, избирательно соединяющего четвертый вращательный элемент 28 и шестой вращательный элемент 30. Второй планетарный зубчатый механизм 15 имеет дифференциальное движение, регулируемое посредством зацепления первого устройства CL1 муфты. Первое устройство CL1 муфты представляет собой пример первого зацепляющего устройства в варианте осуществления настоящего изобретения. Второе устройство CL2 муфты может переключаться между зацепленным состоянием, в котором второе водило C2 и первое водило C1 соединяются, и расцепленным состоянием, в котором зацепленное состояние прекращается. Первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 функционируют в качестве модуля переключения для задания переменным коэффициента деления мощности посредством зацепления второго устройства CL2 муфты. Второе устройство CL2 муфты представляет собой пример второго зацепляющего устройства в варианте осуществления настоящего изобретения. Тормозное устройство BK может переключаться между зацепленным состоянием, в котором входной вал 42 (или первое водило C1) и заданный закрепленный элемент 32 соединяются, и расцепленным состоянием, в котором зацепление прекращается. Тормозное устройство BK включает в себя одностороннюю муфту (OWC) для предотвращения вращения назад выходного вала 41 двигателя 11. Тормозное устройство BK представляет собой пример третьего зацепляющего устройства в варианте осуществления настоящего изобретения.
[0091] В модуле 10A привода, обратный вал 44 размещается параллельно с осью Cnt. Обратный вал 44 монтируется на ведомой шестерне 45, приводимой в зубчатое зацепление с выходным компонентом 16. На обратном валу 44, монтируется ведущая шестерня 46, и эта ведущая шестерня 46 приводится в зубчатое зацепление с коронной шестерней 48 в дифференциальном редукторе 47, которая представляет собой главную ведущую шестерню. Кроме того, ведомая шестерня 45 приводится в зубчатое зацепление с ведущей шестерней 50, смонтированной на роторе 49 во втором электромоторе 13. Следовательно, движущий крутящий момент, сформированный посредством второго электромотора 13, суммируется с движущим крутящим моментом, выведенным из выходного компонента 16, в ведомой шестерне 45. Движущий крутящий момент, синтезированный так, как описано выше, передается на ведущее колесо 53 через левый и правый ведущие валы 51 и 52 из дифференциального редуктора 47.
[0092] Фиг. 3 показывает пример рабочего режима модуля 10A привода, показанного на фиг. 2. Как показано на фиг. 3, модуль 10A привода может задавать любой из режимов № 1 (первого режима) -№ 5 (пятого режима) посредством обработки первого устройства CL1 муфты, второго устройства CL2 муфты и тормозного устройства BK. В частности, каждый из первого-пятого режимов задается посредством обработки первого устройства CL1 муфты, второго устройства CL2 муфты, тормозного устройства BK, двигателя 11, первого электромотора 12 и второго электромотора 13 посредством HV_ECU 22. В столбцах первого устройства CL1 муфты второго устройства CL2 муфты и тормозного устройства BK, показанных на чертеже, "X" указывает расцепление, и "O" указывает зацепление или закрепление.
[0093] В первом режиме (HV Lo), "нижний" режим задается с передаточным отношением, большим передаточного отношения 1, при котором соотношение частот вращения (отношение частоты вращения двигателя к частоте вращения выходного компонента) между входным валом 42 (входным элементом) и выходным компонентом 16 (выходным элементом) устанавливается в сложном планетарном зубчатом механизме 17. Первый режим задается посредством зацепления второго устройства CL2 муфты и посредством расцепления первого устройства CL1 муфты и тормозного устройства BK. В HV-режиме, транспортное средство приводится в движение посредством движущей силы, сформированной посредством двигателя 11, и движущей силы, сформированной посредством второго электромотора 13. Первый режим ("нижний" режим) представляет собой пример второго режима в варианте осуществления настоящего изобретения. Передаточное отношение, когда задается первый режим, представляет собой пример второго передаточного отношения в варианте осуществления настоящего изобретения.
[0094] Второй режим (фиксированная HV-ступень), например, представляет собой режим, в котором фиксированная ступень в рабочем режиме HV или ступень зубчатой передачи задается фиксированным образом равной передаточному отношению в 1, и задается посредством зацепления первого устройства CL1 муфты и второго устройства CL2 муфты, соответственно, а также посредством расцепления тормозного устройства BK. Второй режим (режим прямого соединения), в котором задается фиксированная ступень, представляет собой пример третьего состояния в варианте осуществления настоящего изобретения, и его передаточное отношение равно 1.
[0095] В третьем режиме (HV Hi), "верхний" режим с передаточным отношением, меньшим передаточного отношения в 1 в режиме HV-движения, задается посредством зацепления только первого устройства CL1 муфты. В третьем режиме, первый электромотор 12 приводится в действие в качестве генератора посредством движущей силы, сформированной посредством двигателя 11, чтобы вырабатывать электрическую мощность, и второй электромотор 13 вращается вперед (в направлении, чтобы приводить в движение транспортное средство вперед) посредством вырабатываемой электрической мощности, так что он служит в качестве электромотора для того, чтобы формировать направленный вперед крутящий момент. Транспортное средство приводится в движение посредством движущей силы, в которой движущая сила, сформированная посредством двигателя 11, и движущая сила, сформированная посредством второго электромотора 13, суммируются друг с другом. Третий режим ("верхний" режим) представляет собой пример первого режима в варианте осуществления настоящего изобретения. Передаточное отношение, когда задается третий режим, представляет собой пример первого передаточного отношения в варианте осуществления настоящего изобретения.
[0096] Четвертый режим (EV Lo) представляет собой двухэлектромоторный режим, заданный, когда рабочее состояние транспортного средства находится в области движения за счет электромотора с высокой нагрузкой, когда рабочий режим транспортного средства представляет собой, например, низкую скорость транспортного средства и большую требуемую движущую силу, и задается посредством зацепления второго устройства CL2 муфты и тормозного устройства BK и посредством расцепления первого устройства CL1 муфты. Режим EV-движения представляет собой режим движения в качестве так называемого электротранспортного средства, и в двухэлектромоторном режиме, транспортное средство приводится в движение посредством использования движущих сил, сформированных посредством как первого электромотора 12, так и второго электромотора 13.
[0097] Пятый режим (EV Hi) также представляет собой двухэлектромоторный режим в режиме EV-движения и задается посредством зацепления первого устройства CL1 муфты и тормозного устройства BK и посредством расцепления второго устройства CL2 муфты. Пятый режим задается для области движения за счет электромотора с низкой нагрузкой, когда рабочее состояние транспортного средства представляет собой, например, высокую скорость транспортного средства и низкую требуемую движущую силу.
[0098] Фиг. 4 показывает рабочее состояние первого режима, показанного на фиг. 3. Номографические схемы, включающие в себя фиг. 4, описанный ниже, представляют собой схемы, на каждой из которых вертикальные оси, указывающие вращательные элементы в сложном планетарном зубчатом механизме 17, нарисованы параллельно друг с другом с интервалом, соответствующим передаточному отношению и показывающим частоту вращения каждого из вращательных элементов, указываемую посредством расстояния от базовой линии, ортогональной к этим вертикальным осям. На номографической схеме, ссылки S1, C1 и R1 с номерами обозначают первую солнечную шестерню S1, первое водило C1 и первую коронную шестерню R1, и ссылки S2, C2 и R2 с номерами обозначают вторую солнечную шестерню S2, второе водило C2 и вторую коронную шестерню R2, соответственно.
[0099] Номографическая схема, показанная на фиг. 4, имеет первую ось 14A, вторую ось 14B и третью ось 14C, составляющие первый планетарный зубчатый механизм 14, и четвертую ось 15A, пятую ось 15B и шестую ось 15C, составляющие второй планетарный зубчатый механизм 15, при этом первая ось 14A и шестая ось 15C перекрывают друг друга, и третья ось 14C и пятая ось 15B перекрывают друг друга. Вертикальные оси номографической схемы размещаются в порядке от левой стороны на чертеже второй оси 14B, четвертой оси 15A, первой оси 14A и третьей оси 14C или пятой оси 15B. Таким образом, она представляет собой номографическую схему, на которой шестая ось 15C размещается между первой осью 14A и второй осью 14B. Компоновка шестой оси 15C между первой осью 14A и второй осью 14B включает в себя компоновку шестой оси 15C в позиции, перекрывающей первую ось 14A или вторую ось 14B, включающую в себя вариант осуществления, описанный ниже.
[0100] В варианте осуществления, показанном на фиг. 4, первая ось 14A указывает первое водило C1, с которым соединяется выходной вал 41 двигателя 11. Вторая ось 14B указывает первую солнечную шестерню S1, с которой соединяется ротор 43 первого электромотора 12. Третья ось 14C указывает первую коронную шестерню R1. Четвертая ось 15A указывает вторую коронную шестерню R2, с которой соединяется выходной компонент 16. Пятая ось 15B указывает вторую солнечную шестерню S2, с которой соединяется первая коронная шестерня R1. Шестая ось 15C указывает второе водило C2.
[0101] В первом режиме, в котором задается модуль 10A привода, показанный на фиг. 4, HV-режим движения посредством использования движущей силы, в которой по меньшей мере движущая сила, сформированная посредством двигателя 11 (ENG), и движущая сила, сформированная посредством второго электромотора 13 (MG2), суммируются друг с другом, и он задается, когда рабочее состояние транспортного средства представляет собой состояние высокой нагрузки, в котором скорость транспортного средства является низкой, и требуемая движущая сила является большой. Между первым планетарным зубчатым механизмом 14 и вторым планетарным зубчатым механизмом 15, в дополнение к соединению между первой коронной шестерней R1 и второй солнечной шестерней S2, зацепление второго устройства CL2 муфты обеспечивает возможность первому водилу C1 и второму водилу C2 соединяться. Как результат, в первом режиме, линии, представляющие частоты вращения трех вращательных элементов, составляющих первый планетарный зубчатый механизм 14, перекрываются с линиями, представляющими частоты вращения трех вращательных элементов, составляющих второй планетарный зубчатый механизм 15, на номографической схеме.
[0102] Движущая сила, сформированная посредством двигателя 11, разделяется посредством первого планетарного зубчатого механизма 14 на сторону первого электромотора 12 (MG1) и сторону выходного компонента 16 (OUT) второго планетарного зубчатого механизма 15. Первой солнечной шестерне S1 первого планетарного зубчатого механизма 14 разрешается служить в качестве реактивного элемента посредством управления первым электромотором 12. Сопротивление движению против транспортного средства действует так, как показано посредством направленной вниз силы 55 (стрелки в рамке) на чертеже. Движущий крутящий момент против этого становится крутящим моментом, в котором направленный вперед крутящий момент 56 (полутоновая стрелка), сформированный посредством второго электромотора 13 (MG2), и направленный вперед крутящий момент 58 (полутоновая стрелка), сформированный посредством двигателя 11, суммируются друг с другом. Направленный вперед крутящий момент 57 (полутоновая стрелка), прикладываемый к первому электромотору 12, указывает то, что реактивный крутящий момент формируется. Таким образом, первый электромотор 12 формирует реактивный крутящий момент против движущего крутящего момента, сформированного посредством двигателя 11, за счет чего модуль 10A привода передает движущий крутящий момент, сформированный посредством двигателя 11, в выходной компонент 16.
[0103] В первом режиме, показанном на фиг. 4, частота вращения второй коронной шестерни R2 в качестве выходного элемента ниже частоты вращения первого водила C1 (или частоты вращения двигателя 11). Следовательно, в первом режиме, передаточное отношение в качестве отношения между частотой вращения входного вала и частотой вращения выходного вала превышает 1. Таким образом, так называемое состояние понижающей передачи (U/D) устанавливается.
[0104] Таким образом, сложный планетарный зубчатый механизм 17 служит в качестве механизма деления мощности для распределения движущего крутящего момента двигателя 11 на сторону первого электромотора 12 и сторону выходного компонента 16, и в силу этого передаточное отношение, когда частота вращения первого электромотора 12 равна нулю в первом режиме, составляет "1/(1-ρ1*ρ2)". Здесь, "ρ1" представляет собой передаточное отношение в первом планетарном зубчатом механизме 14 (отношение между числом зубьев первой солнечной шестерни S1 и числом зубьев первой коронной шестерни R1), и "ρ2" представляет собой передаточное отношение во втором планетарном зубчатом механизме 15 (отношение между числом зубьев второй солнечной шестерни S2 и числом зубьев второй коронной шестерни R2).
[0105] Фиг. 5 показывает рабочее состояние второго режима, показанного на фиг. 3. Как показано на фиг. 5, зацепление первого устройства CL1 муфты обеспечивает возможность каждому из вращательных элементов 28-30, составляющих второй планетарный зубчатый механизм 15, в общем, вращаться как единое целое. Кроме того, зацепление второго устройства CL2 муфты обеспечивает возможность первому водилу C1 соединяться со вторым водилом C2. Первый электромотор 12, например, может работать в качестве генератора посредством движущей силы, сформированной посредством двигателя 11. Посредством использования электричества, вырабатываемого посредством первого электромотора 12, второму электромотору 13 разрешается выводить движущую силу для приведения в движение транспортного средства. Следовательно, в пятом режиме, движущий крутящий момент, сформированный посредством второго электромотора 13, суммируется с движущим крутящим моментом, сформированным посредством двигателя 11, в участке ведомой шестерни 45 таким образом, что он становится допускающим движение. В этом втором режиме, сложный планетарный зубчатый механизм 17 служит в качестве трансмиссии, в которой передаточное отношение, например, задается фиксированным образом равным 1. Таким образом, частота вращения двигателя 11 становится равной частоте вращения выходного компонента 16 в любой момент времени.
[0106] Фиг. 6 показывает рабочее состояние третьего режима, показанного на фиг. 3. Как показано на фиг. 6, третий режим представляет собой режим, заданный в состоянии с низкой нагрузкой, когда рабочее состояние транспортного средства представляет собой, например, высокую скорость транспортного средства и небольшую требуемую движущую силу, и задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты. Относительно второго планетарного зубчатого механизма 15, посредством зацепления первого устройства CL1 муфты, соединяются два вращательных элемента, т.е. вторая коронная шестерня R2 и второе водило C2, и все вращается как единое целое. Ссылка 55 с номером, показанная на фиг. 6, обозначает направленную вниз силу, представляющую нагрузку при движении, которая является идентичной или аналогичной ссылке с номером, показанной на фиг. 4, ссылка 56 с номером обозначает направленный вперед крутящий момент, сформированный посредством второго электромотора 13, ссылка 58 с номером обозначает направленный вперед крутящий момент, сформированный посредством двигателя 11. Первый электромотор 12 выводит реактивный крутящий момент против движущего крутящего момента, сформированного посредством двигателя 11, за счет чего модуль 10A привода передает движущий крутящий момент, сформированный посредством двигателя 11, в выходной компонент 16.
[0107] В состоянии, показанном на фиг. 6, частота вращения второй коронной шестерни R2 (или выходного компонента 16) становится выше частоты вращения первого водила C1 (или частоты вращения двигателя). Следовательно, третий режим имеет передаточное отношение, меньшее 1, что представляет собой так называемое состояние повышающей передачи (O/D) с точки зрения передаточного отношения, которое составляет отношение между частотой вращения входного вала и частотой вращения выходного вала. Таким образом, поскольку второй планетарный зубчатый механизм 15 переходит в состояние прямого соединения, передаточное отношение в третьем режиме, когда частота вращения первого электромотора 12 равна нулю, становится "1/(1+ρ1)".
[0108] Фиг. 7 показывает рабочее состояние четвертого режима, показанного на фиг. 3. В четвертом режиме, показанном на фиг. 7, вращение выходного вала 41 двигателя 11 прекращается, и первый электромотор 12 и второй электромотор 13 выводят движущую силу для движения посредством выступания в качестве электромоторов посредством электричества, накопленного в аккумуляторе 33. Таким образом, в рабочем состоянии, показанном на фиг. 7, посредством зацепления второго устройства CL2 муфты и тормозного устройства BK, вращения первого водила C1 и второго водила C2 предотвращаются. Первое водило C1 и второе водило C2 служат в качестве реактивного элемента. Сопротивление движению против транспортного средства действует так, как показано посредством направленной вниз силы 55. Движущий крутящий момент против этого представляет собой крутящий момент, в котором направленный вперед крутящий момент 56, сформированный посредством второго электромотора 13, и направленный вперед крутящий момент 57, сформированный посредством первого электромотора 12, суммируются между собой. В рабочем состоянии, показанном на фиг. 7, первый электромотор 12 управляется таким образом, что он вращается в прямом направлении, идентичном прямому направлению второй коронной шестерни R2 и ротора 49 второго электромотора 13. Четвертый режим задается в качестве состояния "нижнего" режима, в котором частота вращения выходного компонента 16 становится ниже частоты вращения первого электромотора 12. В этом четвертом режиме, движущая сила в области низкой скорости транспортного средства повышается по сравнению с пятым режимом. Таким образом, четвертый режим задается в состоянии с высокой нагрузкой, в котором рабочее состояние транспортного средства представляет собой, например, низкую скорость транспортного средства и большую требуемую движущую силу.
[0109] Фиг. 8 показывает рабочее состояние пятого режима, показанного на фиг. 3. Как показано на фиг. 8, пятый режим задается посредством расцепления второго устройства CL2 муфты и посредством зацепления первого устройства CL1 муфты и тормозного устройства BK. Второй планетарный зубчатый механизм 15 вращается как единое целое посредством зацепления первого устройства CL1 муфты. Сопротивление движению против транспортного средства действует так, как показано посредством направленной вниз силы 55. Движущий крутящий момент против этого представляет собой крутящий момент, в котором крутящий момент, сформированный посредством второго электромотора 13, и крутящий момент, сформированный посредством первого электромотора 12, суммируются друг с другом. В рабочем состоянии, показанном на фиг. 8, первый электромотор 12 вращается в направлении, противоположном второй коронной шестерне R2 и ротору 49 второго электромотора 13. Пятый режим задается в качестве состояния "верхнего" режима, в котором частота вращения выходного компонента 16 выше частоты вращения первого электромотора 12. Таким образом, пятый режим задается в состоянии с низкой нагрузкой, когда рабочее состояние транспортного средства представляет собой, например, высокую скорость транспортного средства и небольшую требуемую движущую силу.
[0110] Фиг. 9 показывает пример области движения, в которой задается рабочий режим HV, показанный на фиг. 3. Поперечная ось, показанная на фиг. 9, указывает скорость транспортного средства, и вертикальная ось указывает движущую силу (выходной крутящий момент) транспортного средства. Движущая сила соответствует требуемому крутящему моменту (требуемой движущей силе), например, на основе открытия акселератора, состояния движения, окружения движения и т.п. и целевого крутящего момента (целевой движущей силы). Как показано на фиг. 9, область движения разделяется на область 61 движения в "нижнем" режиме (область, указываемую посредством сплошной линии) для движения в первом режиме и область 62 движения в "верхнем" режиме (область, указываемую посредством пунктирной линии) для движения в третьем режиме. Область 61 движения в "нижнем" режиме и область 62 движения в "верхнем" режиме отделены посредством граничной линии L1. Область 61 движения в "нижнем" режиме представляет собой область на стороне начала координат от граничной линии L1, тогда как область 62 движения в "верхнем" режиме представляет собой область на стороне, противостоящей стороне начала координат от граничной линии L1. HV_ECU 22 определяет скорость транспортного средства на основе информации, полученной из датчика 34 скорости транспортного средства, и определяет требуемую движущую силу на основе информации, полученной из датчика 35 открытия акселератора. Датчик 34 скорости транспортного средства и датчик 35 открытия акселератора представляют собой примеры детектора в варианте осуществления настоящего изобретения.
[0111] В этом варианте осуществления, HV_ECU 22 переключает режим HV-движения на основе скорости транспортного средства и требуемой движущей силы, но это не является ограничивающим, и может переключать режим HV-движения, например, на основе по меньшей мере любого из скорости транспортного средства и требуемой движущей силы. Таким образом, в случае по меньшей мере одного из состояний движения, в которых скорость транспортного средства представляет собой низкую скорость транспортного средства, равную заданной скорости транспортного средства или меньше, и в которых требуемая движущая сила, которая представляет собой высокую движущую силу, превышающую заданную движущую силу, может выбираться первый режим, и в случае по меньшей мере любого из состояний движения, в которых скорость транспортного средства, которая представляет собой высокую скорость транспортного средства, превышающую заданную скорость транспортного средства, и в которых требуемая движущая сила, которая представляет собой низкую движущую силу, не выше заданной движущей силы, может выбираться третий режим.
[0112] В этом варианте осуществления, первый режим, задаваемый, когда состояние движения находится в области 61 движения в "нижнем" режиме, имеет передаточное отношение, которое составляет отношение между частотой вращения входного вала и частотой вращения выходного вала, превышает 1, и в силу этого в области 61 движения в "нижнем" режиме, максимальная движущая сила становится больше максимальной движущей силы в области 62 движения в "верхнем" режиме (ссылка 61a с номером, указываемая на чертеже). Таким образом, третий режим, заданный, когда состояние движения транспортного средства находится в области 62 движения в "верхнем" режиме, имеет передаточное отношение, которое составляет отношение между частотой вращения входного вала и частотой вращения выходного вала, меньшее 1, и в силу этого в области 62 движения в "верхнем" режиме, максимальная движущая сила становится меньше максимальной движущей силы в области 61 движения в "нижнем" режиме (ссылка 62a с номером). Граничная линия L1 указывает область движения, переключенную на второй режим (передаточное отношение в 1). Таким образом, она указывает то, что когда режим движения должен переключаться между первым режимом 61b и третьим режимом 62b, переключение выполняется через второй режим 63.
[0113] Фиг. 10 показывает пример теоретической эффективности трансмиссии, для которой задаются первый режим и третий режим. На фиг. 10, поперечная ось указывает передаточное отношение, тогда как вертикальная ось указывает теоретическую эффективность трансмиссии. На поперечной оси, левая сторона представляет собой сторону верхней передачи с меньшим передаточным отношением, тогда как правая сторона представляет собой сторону нижней передачи с большим передаточным отношением.
[0114] Пунктирная кривая 64 (64A, 64B) и сплошная кривая 65 (65A, 65B), показанные на фиг. 10, представляют собой линии, показывающие теоретическую эффективность трансмиссии в режиме HV-движения, когда первый режим и третий режим переключаются надлежащим образом. Пунктирные линии 64A-64C, показанные на чертеже, представляют собой линию 64 теоретической эффективности трансмиссии в первом режиме, и сплошные линии 65A-65C, показанные на чертеже, представляют собой линию 65 теоретической эффективности трансмиссии в третьем режиме. Относительно правая сторона представляет собой линию 64 теоретической эффективности трансмиссии в первом режиме, и левая сторона представляет собой линию 65 теоретической эффективности трансмиссии в третьем режиме. Первая механическая точка 64D, которая становится точкой максимальной эффективности в линии 64 теоретической эффективности трансмиссии, равна передаточному отношению γ1. При передаточном отношении γ1, когда частота вращения первого электромотора 12 (первой солнечной шестерни S1) равна нулю, мощность может передаваться из двигателя 11 в выходной компонент 16 с максимальной эффективностью. Это передаточное отношение γ1 представляет собой передаточное отношение на стороне нижней передачи, большее передаточного отношения в 1 во втором режиме.
[0115] Третья механическая точка 65D, которая представляет собой точку максимальной эффективности в линии 65 теоретической эффективности трансмиссии, равна передаточному отношению γ2. При передаточном отношении γ2, когда частота вращения первого электромотора 12 равна нулю, мощность может передаваться из двигателя 11 в выходной компонент 16 с максимальной эффективностью. Это передаточное отношение γ2 представляет собой передаточное отношение на стороне верхней передачи, меньшее передаточного отношения в 1 во втором режиме.
[0116] В линии 64 теоретической эффективности трансмиссии в первом режиме и линии 65 теоретической эффективности трансмиссии в третьем режиме, область 66, которая представляет собой диапазон A между передаточным отношением γ1 и передаточным отношением γ2, искривлена к низкоэффективной стороне. В этой области 66, задается линия 67 теоретической эффективности трансмиссии во втором режиме. Вторая механическая точка 67a в линии 67 теоретической эффективности трансмиссии во втором режиме представляет собой передаточное отношение в 1. Таким образом, когда частота вращения выходного вала 41 двигателя 11 (частота вращения первого водила C1) синхронизируется с частотой вращения выходного компонента 16 (второй коронной шестерни R2), получается максимальная эффективность. HV_ECU 22 выбирает режим с хорошей теоретической эффективностью трансмиссии в передаточном отношении, например, из первого режима, второго режима и третьего режима.
[0117] Как описано выше, модуль 10 привода согласно этому варианту осуществления имеет первую механическую точку 64D и третью механическую точку 65D, с обеих сторон размещающую посередине вторую механическую точку 67a. Таким образом, поскольку модуль 10 привода имеет участок переключения частоты вращения, включающий в себя первый планетарный зубчатый механизм 14, второй планетарный зубчатый механизм 15, первое устройство CL1 муфты и второе устройство CL2 муфты, вторая механическая точка 67a может формироваться между первой механической точкой 64D и третьей механической точкой 65D.
[0118] Как описано выше, передаточное отношение γ1 первой механической точки 64D составляет "1/(1-ρ1*ρ2)". Передаточное отношение γ2 третьей механической точки 65D составляет "1/(1+ρ1)". Таким образом, при переключении между первым режимом и третьим режимом, поскольку передаточное отношение γ1 и передаточное отношение γ2 представляют собой передаточные отношения ближе к передаточному отношению в 1, управление синхронным вращением выполняется однократно, и рабочая точка с хорошей теоретической эффективностью трансмиссии проходит даже через второй режим с передаточным отношением в 1. Таким образом, рабочее состояние модуля 10 привода изменяется таким образом, что оно проходит рабочую точку с хорошей теоретической эффективностью трансмиссии. Таким образом, понижение эффективности использования топлива может подавляться. Кроме того, в модуле 10 привода, вторая механическая точка 67a задается между первой механической точкой 64D и третьей механической точкой 65D. Таким образом, при переключении между "нижним" режимом и "верхним" режимом, даже если управление синхронным вращением выполняется, и режим переключается на второй режим временно, передаточное отношение изменяется только в направлении изменения передаточного отношения до сих пор, и в силу этого может подавляться, например, такое явление, что вращение двигателя резко возрастает или падает.
[0119] HV_ECU 22 управляет первым электромотором 12, вторым электромотором 13, первым устройством CL1 муфты и вторым устройством CL2 муфты в ассоциации при переключении между первым режимом и третьим режимом. Как результат, непрерывное изменение передаточного отношения из двигателя 11 на ведущее колесо 53 транспортного средства полностью может подавляться или уменьшаться, и степень изменения передаточного отношения может уменьшаться. Посредством подавления изменения передаточного отношения из двигателя 11 на ведущее колесо 53, может уменьшаться величина регулирования частоты вращения двигателя с переключением частоты вращения, или регулирование частоты вращения двигателя может становиться необязательным.
[0120] Регулирование передаточного отношения сложного планетарного зубчатого механизма 17 осуществляется, например, посредством управления частотой вращения первого электромотора 12. HV_ECU 22 управляет первым электромотором 12 таким образом, чтобы непрерывно изменять, например, передаточное отношение между входным валом 42 и выходным компонентом 16. Как результат, все то, что включает в себя первый планетарный зубчатый механизм 14, второй планетарный зубчатый механизм 15, первый электромотор 12, первое устройство CL1 муфты и второе устройство CL2 муфты, т.е. сложный планетарный зубчатый механизм 17, включающий в себя дифференциальный участок и участок переключения частоты вращения, работает в качестве электрической бесступенчатой трансмиссии.
[0121] Фиг. 11 показывает переход номографической схемы, показывающей рабочее состояние, когда третий режим переключается на первый режим в случае, если первое устройство CL1 муфты и второе устройство CL2 муфты представляют собой устройство фрикционной муфты. Когда третий режим переключается на первый режим, рабочее состояние изменяется на номографических схемах, показанных на фиг. 11, в порядке от номографической схемы (1), номографической схемы (2), номографической схемы (3), номографической схемы (4), номографической схемы (5) и номографической схемы (6). Номографическая схема (1) является номографической схемой, показывающей рабочее состояние в третьем режиме, номографическая схема (6) является номографической схемой, показывающей рабочее состояние в первом режиме, и номографические схемы (2)-(5) показывают состояние перехода с переключением с третьего режима на первый режим. Устройство фрикционной муфты может представлять собой устройство многодисковой мокрой муфты, допускающее непрерывное изменение перегрузочной способности по передаче крутящего момента, например, посредством непрерывного управления подачей рабочего расхода масла муфты и рабочего давления масла муфты посредством пропорционального соленоида.
[0122] Устройство фрикционной муфты зацепляет вращающийся элемент на входной стороне, к которому прикладывается движущий крутящий момент, с вращающимся элементом на выходной стороне для вывода движущего крутящего момента посредством силы трения. Перегрузочная способность по передаче крутящего момента устройства гидравлической муфты определяется, например, посредством коэффициента трения фрикционного материала, предусмотренного в каждом из вращающегося элемента на входной стороне и вращающегося элемента на выходной стороне, и гидравлического давления для зацепления, прижимающего фрикционный диск.
[0123] Как показано на фиг. 11, номографическая схема (1) представляет собой состояние, в котором первое устройство CL1 муфты зацепляется, и второе устройство CL2 муфты расцепляется. В этом состоянии, частота вращения первого электромотора 12 выше частоты вращения выходного компонента 16 и частоты вращения выходного вала 41 двигателя 11. Первый электромотор 12 функционирует в качестве генератора мощности посредством вывода отрицательного крутящего момента при прямом вращении. Частота вращения выходного компонента 16 ниже частоты вращения выходного вала 41 двигателя 11. Таким образом, состояние движения на номографической схеме (1) представляет собой, например, состояние, в котором педаль акселератора не нажимается (движения без использования мощности), и уклон под спуск или состояние инерционного движения на ровной дороге на высокой скорости транспортного средства, превышающей заданную скорость транспортного средства. Когда педаль акселератора нажимается на заданную величину или более таким образом, чтобы переходить в состояние движения с использованием мощности из этого состояния, требуется переключение "вниз".
[0124] На номографической схеме (2), в ответ на запрос на переключение "вниз", первое устройство CL1 муфты изменяется на состояние частичного зацепления. Таким образом, HV_ECU 22 передает команду гидравлического управления для задания гидравлического давления, задающего перегрузочную способность по передаче крутящего момента первого устройства CL1 муфты, равным гидравлическому давлению (гидравлическому давлению состояния проскальзывания), соответствующему состоянию частичного зацепления, в гидравлический контроллер 21. После этого, команда гидравлического управления первого устройства CL1 муфты выполняется практически параллельно с командой гидравлического управления для задания гидравлического давления состояния проскальзывания. Управление для понижения перегрузочной способности по передаче крутящего момента, заданной для первого устройства CL1 муфты, зацепленного перед переключением частоты вращения, представляет собой пример первого управления в варианте осуществления настоящего изобретения.
[0125] Когда первое устройство CL1 муфты переводится в состояние частичного зацепления, вторая коронная шестерня R2 и второе водило C2 входят в состояние проскальзывания. Как результат, второй планетарный зубчатый механизм 15 начинает функционировать в качестве блока дифференциала. В этой ситуации, частота вращения двигателя 11 повышена посредством нажатия педали акселератора, и задаются целевая частота вращения двигателя 11 и целевая частота вращения первого электромотора 12. Таким образом, первый электромотор 12 имеет вращение ротора 43, уменьшенное на основе частоты вращения выходного вала 41 двигателя 11. Первый электромотор 12 задается с возможностью функционировать в качестве генератора мощности в операции уменьшения вращения, т.е. когда отрицательный крутящий момент выводится при прямом вращении.
[0126] На номографической схеме (3), первое управление заполнением применяется ко второму устройству CL2 муфты, и подача гидравлического давления во второе устройство CL2 муфты начинается, и после этого, команда гидравлического управления для задания перегрузочной способности по передаче крутящего момента второго устройства CL2 муфты равной гидравлическому давлению состояния проскальзывания передается. После этого, команда гидравлического управления второго устройства CL2 муфты выполняется практически параллельно со значением команды управления, инструктирующим гидравлическое давление состояния проскальзывания. Таким образом, как первое устройство CL1 муфты, так и второе устройство CL2 муфты переводятся в состояние проскальзывания. Управление для увеличения перегрузочной способности по передаче крутящего момента, заданной для второго устройства CL2 муфты, расцепленного перед переключением частоты вращения, представляет собой пример второго управления в варианте осуществления настоящего изобретения.
[0127] Когда выходной вал 41 (или первое водило C1) двигателя 11 и второе водило C2 переводятся в состояние проскальзывания, частоты вращения второго водила C2 и второй солнечной шестерни S2 увеличиваются, и линия, указывающая частоту вращения каждого вращательного элемента второго планетарного зубчатого механизма 15, изменяется из горизонтального состояния на состояние, возрастающее в правую сторону.
[0128] С другой стороны, когда выходной вал 41 двигателя 11 и второе водило C2 переводятся в состояние проскальзывания, частота вращения выходного вала 41 изменяется, например, таким образом, чтобы она резко возрастает. Таким образом, на ротор 43 первого электромотора 12, инерционный крутящий момент на стороне двигателя 11 действует с изменением частоты вращения выходного вала 41. Приведение в действие первого электромотора 12 и второго электромотора 13 управляется таким образом, что инерционный крутящий момент, сформированный в первом электромоторе 12, не действует на флуктуацию крутящего момента ведущих валов 51 и 52. Затем частота вращения первого электромотора 12 начинает снижаться, и второе устройство CL2 муфты переводится в состояние частичного зацепления, за счет чего частота вращения выходного вала 41 (или первого водила C1) приближается к частоте вращения второго водила C2, и синхронизация (окончание инерционной фазы) определяется посредством того, падает либо нет их разность частот вращения до заданной разности частот вращения, заданной заранее, или меньше.
[0129] На номографической схеме (4), HV_ECU 22 передает команду гидравлического управления для увеличения гидравлического давления второго устройства CL2 муфты к гидравлическому давлению для зацепления в ответ на определение синхронизации с гидравлическим контроллером 21. Как результат, передача крутящего момента увеличивается между первым водилом C1 и вторым водилом C2, и состояние изменяется на рабочее состояние номографической схемы, в котором линия, указывающая частоту вращения каждого вращательного элемента первого планетарного зубчатого механизма 14, перекрывает линию, указывающую каждый вращательный элемент второго планетарного зубчатого механизма 15.
[0130] Когда гидравлическое давление второго устройства CL2 муфты постепенно увеличивается к гидравлическому давлению для зацепления, частота вращения выходного вала 41 двигателя 11 снижается. Таким образом, чтобы компенсировать движущий крутящий момент, передаваемый на ведущие валы 51 и 52, посредством компенсации на эту величину, первый электромотор 12 переключается из прямого вращения на отрицательное вращение, и движущий крутящий момент, сформированный посредством второго электромотора 13, увеличивается. В этот момент времени, первый электромотор 12 выводит отрицательный крутящий момент при отрицательном вращении и задается с возможностью функционировать в качестве генератора мощности. Затем посредством обнаружения окончания инерционной фазы или синхронной фазы вращения, в которой частота вращения выходного вала 41 двигателя 11 изменяется к частоте вращения выходного компонента 16, гидравлическое давление второго устройства CL2 муфты повышается до гидравлического давления для зацепления. Как результат, гидравлическое давление перегрузочной способности по передаче крутящего момента второго устройства CL2 муфты достигает гидравлического давления для зацепления и переводится в полностью зацепленное состояние. До того, как инерционная фаза заканчивается, управление снижением крутящего момента двигателя 11 может выполняться в ассоциации таким образом, чтобы поглощать инерционный крутящий момент, сформированный с изменением частоты вращения двигателя 11.
[0131] В рабочем состоянии на номографической схеме (5), в ответ на определение полностью зацепленного состояния второго устройства CL2 муфты, крутящий момент нагрузки первого электромотора 12 изменяется на противоположное с направленного вперед крутящего момента на отрицательный крутящий момент.
[0132] На номографической схеме (6), в ответ на функционирование первого электромотора 12 в качестве электромотора, гидравлическое давление перегрузочной способности по передаче крутящего момента первого устройства CL1 муфты понижается к гидравлическому давлению для расцепления. Как результат, вторая коронная шестерня R2 и второе водило C2 переводятся в полностью расцепленное состояние, и рабочий режим, в котором задается модуль 10 привода, задается в качестве первого режима. В первом режиме, полный крутящий момент из направленного вперед крутящего момента (направленного вверх крутящего момента), сформированного посредством второго электромотора 13, и движущего крутящего момента (направленного вверх крутящего момента), сформированного посредством двигателя 11, противодействует сопротивлению движению (направленному вниз крутящему моменту).
[0133] Фиг. 12 является пояснительным видом, показывающим изменение частот вращения первого электромотора 12, двигателя 11 и выходного компонента 16, соответствующее переходу рабочего режима, показанного на фиг. 11. Номера (1)-(6), показанные на фиг. 12, соответствуют номерам на номографической схеме, показанной на фиг. 11. Ссылка 68 с номером обозначает частоту вращения первого электромотора 12, ссылка 69 с номером обозначает частоту вращения выходного вала 41 двигателя 11, и ссылка 70 с номером обозначает частоту вращения выходного компонента 16, соответственно.
[0134] Как показано на фиг. 12, первый электромотор 12 имеет частоту вращения, пониженную, когда рабочий режим изменяется с первого режима на третий режим через состояние проскальзывания. При переходе в состояние проскальзывания, частота вращения выходного вала 41 двигателя 11 понижается на основе изменения частоты вращения первого электромотора 12, и частота вращения выходного вала 41 синхронизируется с частотой вращения выходного компонента 16 (ссылка 71 с номером, показанная на чертеже). В это время или до/после этого, второе устройство CL2 муфты переключается в зацепленное состояние. Как результат, инерционный крутящий момент, сформированный с изменением частоты вращения двигателя 11, может подавляться.
[0135] Фиг. 13 показывает процедуру управления HV_ECU 22, когда третий режим переключается на первый режим, показанный на фиг. 11. Процедура работы, показанная на фиг. 13, как описано выше, представляет собой процедуру работы, когда первое устройство CL1 муфты и второе устройство CL2 муфты представляют собой устройства гидравлической многодисковой мокрой муфты. Блок-схема последовательности операций способа, показанная на фиг. 13, многократно выполняется каждое заданное время.
[0136] Как показано на фиг. 13, на этапе S1, собирается такая информация, как скорость транспортного средства, открытие акселератора, текущий рабочий режим и т.п.
[0137] На этапе S2, движение с использованием мощности и запрос на переключение "вниз" считываются во время движения в третьем режиме. После этого, процедура переходит к этапу S3.
[0138] На этапе S3, чтобы понижать нагрузку, прикладываемую к первому устройству CL1 муфты и второму устройству CL2 муфты на высокой скорости транспортного средства, определяется то, выше или равна либо нет частота Nr2 вращения выходного компонента 16 первому пороговому значению ΔNth1. Если частота Nr2 вращения выходного компонента 16 меньше первого порогового значения ΔNth1 (в случае стороны "Нет"), процедура переходит к этапу S4, в противном случае (в случае стороны "Да"), процедура переходит к этапу S5. Таким образом, в случае низкой скорости транспортного средства, при которой частота Nr2 вращения выходного компонента 16 меньше первого порогового значения ΔNth1, процедура переходит к процедуре переключения на первый режим таким образом, что получается переход на номографической схеме, показанной на фиг. 11. Рабочее состояние, в котором частота Nr2 вращения выходного компонента 16 меньше первого порогового значения ΔNth1, соответствует рабочему состоянию номографической схемы (1), показанной на фиг. 11.
[0139] На этапе S4, выполняется управление изменением состояния первого устройства CL1 муфты с зацепленного состояния на состояние частичного зацепления (состояние проскальзывания). Это состояние соответствует рабочему состоянию номографической схемы (2), показанной на фиг. 11.
[0140] На этапе S6, задаются целевая частота вращения первого электромотора 12 и целевая частота Ne_trg вращения (целевая частота вращения двигателя) двигателя 11.
[0141] На этапе S7, второе устройство CL2 муфты изменяется с расцепленного состояния на состояние частичного зацепления (состояние проскальзывания). Это состояние соответствует рабочему состоянию номографической схемы (3), показанной на фиг. 11.
[0142] На этапе S8, завершение синхронизации частоты вращения определяется посредством того факта, что разность частот вращения между частотой вращения выходного вала 41 (или первого водила C1) и частотой вращения второго водила C2 падает до заданной разности частот вращения или менее, заданной заранее.
[0143] На этапе S9, второе устройство CL2 муфты изменяется с состояния проскальзывания в зацепленное состояние. Это состояние соответствует рабочему состоянию номографической схемы (4), показанной на фиг. 11.
[0144] На этапе S10, движущий крутящий момент, сформированный посредством первого электромотора 12, изменяется на противоположное с отрицательного крутящего момента на направленный вперед крутящий момент. Это состояние соответствует рабочему состоянию номографической схемы (5), показанной на фиг. 11.
[0145] На этапе S11, первое устройство CL1 муфты расцепляется. После этого, процедура переходит к этапу S12 и выводит сигнал, указывающий то, что завершается переход в первый режим. Это состояние соответствует рабочему состоянию номографической схемы (6), показанной на фиг. 11.
[0146] С другой стороны, если частота Nr2 вращения выходного компонента 16 выше первого порогового значения ΔNth1 на этапе S3, процедура переходит к этапу S5. На этапе S5, определяется то, выше разность ΔN частот вращения между частотой Ne вращения двигателя и частотой Nr2 вращения выходного компонента 16 второго порогового значения ΔNth2, но не меньше третьего порогового значения ΔNth3, или нет. Таким образом, если частота вращения выходного компонента 16 является высокой, управление, в котором второе устройство CL2 муфты переключается в зацепленное состояние, выполняется при условии, что разность ΔN частот вращения между частотой вращения двигателя и частотой Nr2 вращения выходного компонента 16 попадает в заданный диапазон. Если разность ΔN частот вращения выше второго порогового значения ΔNth2 и меньше третьего порогового значения ΔNth3 (в случае стороны "Да"), процедура переходит к этапу S13, в противном случае (в случае стороны "Нет"), процедура возвращается к этапу S1.
[0147] На этапе S13, второе устройство CL2 муфты переключается из расцепленного состояния в зацепленное состояние. Как результат, модуль 10A привода изменяется на второй режим в случае высокой скорости транспортного средства в запросе на переключение "вниз". На этапе S14, определяется то, переключено или нет второе устройство CL2 муфты в зацепленное состояние. Это определение выполняется, например, посредством того, содержится или нет разность частот вращения между частотой вращения вращающегося элемента на входной стороне и частотой вращения вращающегося элемента на выходной стороне, составляющего второе устройство CL2 муфты, в пределах заданного диапазона.
[0148] На этапе S15, определяется то, меньше или нет абсолютное значение разности ΔNe частот вращения между целевой частотой Ne_trg вращения двигателя и частотой Ne вращения двигателя четвертого порогового значения ΔNth4. Если абсолютное значение разности ΔNe частот вращения меньше четвертого порогового значения ΔNth4 (в случае "Да"), т.е. если движущая сила двигателя 11 достигает запроса на движущую силу, процедура переходит к этапу S16 и переходит в состояние, в котором первое устройство CL1 муфты и второе устройство CL2 муфты зацепляются, т.е. во второй режим. Если нет (в случае "Нет"), т.е. если движущая сила двигателя 11 не достигает запроса на движущую силу, процедура переходит к этапу S17. На этапе S17, первое устройство CL1 муфты переключается из зацепленного состояния в расцепленное состояние, и процедура переходит к этапу S18.
[0149] На этапе S18, определяется то, переключено или нет первое устройство CL1 муфты в расцепленное состояние. Это определение выполняется, например, посредством того, содержится или нет разность частот вращения между частотой вращения вращающегося элемента на входной стороне и частотой вращения вращающегося элемента на выходной стороне, составляющего первое устройство CL1 муфты, в пределах заданного диапазона. Если определено то, что переключение первого устройства CL1 муфты в расцепленное состояние завершается (в случае "Да"), процедура переходит к этапу S19 и выводит сигнал, указывающий то, что завершается переход в первый режим. Если определено то, что переключение первого устройства CL1 муфты в расцепленное состояние не завершается (в случае "Нет"), процедура возвращается к этапу S17, и управление переключением первого устройства CL1 муфты в расцепленное состояние продолжается.
[0150] На блок-схеме последовательности операций способа, показанной на фиг. 13, после того, как первое устройство CL1 муфты переключается на этапе S4 из зацепленного состояния на состояние проскальзывания, второе устройство CL2 муфты переключается на этапе S7 из расцепленного состояния на состояние проскальзывания, но настоящее изобретение не ограничено этим, и они могут выполняться одновременно. В этом случае, после того, как целевая частота вращения первого электромотора 12 и целевая частота Ne_trg вращения двигателя задаются на этапе S6, первое устройство CL1 муфты и второе устройство CL2 муфты переключаются в состояние проскальзывания одновременно. Аналогично, после того, как второе устройство CL2 муфты переключается из состояния проскальзывания в зацепленное состояние на этапе S9, первое устройство CL1 муфты переключается из состояния проскальзывания в расцепленное состояние на этапе S11, но они могут выполняться одновременно.
[0151] Фиг. 13 показывает процедуру работы, когда модуль 10 привода переключается из третьего режима на первый режим, когда первое устройство CL1 муфты и второе устройство CL2 муфты представляют собой устройства гидравлической многодисковой мокрой муфты. С другой стороны, процедура работы для переключения модуля 10 привода с первого режима на третий режим (в случае переключения "вверх"), переход на номографической схеме становится противоположным переходу на номографической схеме, показанной на фиг. 11, и блок-схема последовательности операций способа, показывающая процедуру работы, становится процедурой, в которой первое устройство CL1 муфты и второе устройство CL2 муфты переключаются относительно друг друга в процедуре работы, показанной на фиг. 13. Таким образом, подробное описание здесь опускается.
[0152] Фиг. 14 является временной диаграммой, показывающей пример команды гидравлического управления, когда первое устройство CL1 муфты и второе устройство CL2 муфты переключаются одновременно. Вертикальная ось, показанная на фиг. 14, указывает команды гидравлического управления первого устройства CL1 муфты и второго устройства CL2 муфты, соответственно, тогда как поперечная ось указывает время.
[0153] Во время t1, в ответ на вывод запроса на переключение "вниз" с третьего режима на первый режим, например, управление переключением частоты вращения начинается. Переключение "вниз" с третьего режима на первый режим, как пояснено на фиг. 13, представляет собой то, что первое устройство CL1 муфты расцепляется, и второе устройство CL2 муфты зацепляется.
[0154] Когда управление переключением частоты вращения начинается, чтобы быстро повышать гидравлическое давление второго устройства CL2 муфты, выполняется управление быстрым заполнением, при котором команда гидравлического управления во второе устройство CL2 муфты временно задается равной высокому значению (ссылка 14A с номером). Одновременно, гидравлическое давление первого устройства CL1 муфты понижается до гидравлического давления состояния проскальзывания (ссылка 14B с номером), соответствующего состоянию проскальзывания, с гидравлического давления для зацепления.
[0155] Во время t2, гидравлическое давление второго устройства CL2 муфты после того, как управление быстрым заполнением заканчивается, понижается до гидравлического давления непосредственно перед передачей крутящего момента (пониженного давления холостого хода) (ссылка 14C с номером). Как результат, первое устройство CL1 муфты переходит в состояние проскальзывания, и второе устройство CL2 муфты удерживается около давления в конце хода поршня. Давление в конце хода представляет собой гидравлическое давление, когда два диска просто приводятся в контакт друг с другом, когда поршень перемещается посредством гидравлического давления из расцепленного состояния, в котором ведущий диск и ведомый диск отделены друг от друга во фрикционном зацепляющем устройстве, т.е. до такой степени, что крутящий момент не передается.
[0156] Во время t3, например, выполняется обработка снижения для задания команды гидравлического управления таким образом, что гидравлическое давление первого устройства CL1 муфты постепенно понижается на заданный градиент на заданный градиент, определенный заранее (ссылка 14D с номером). Параллельно с обработкой снижения, например, выполняется обработка повышения для задания команды гидравлического управления таким образом, что гидравлическое давление во второе устройство CL2 муфты постепенно повышается на заданный градиент, определенный заранее (ссылка 14E с номером). Как результат, реализуется такая фаза крутящего момента, что часть крутящего момента, выдерживаемого посредством первого устройства CL1 муфты на зацепленной стороне, выдерживается посредством второго устройства CL2 муфты на расцепленной стороне. Фаза крутящего момента представляет собой период передачи крутящего момента для понижения частоты вращения выходного вала 41 двигателя 11 до частоты вращения, синхронизированной с частотой вращения выходного компонента 16.
[0157] Во время t4, взаимосвязь между крутящими моментами, которые должны выдерживаться, постепенно изменяется на противоположное, и реализуется такая инерционная фаза, что частота вращения выходного вала 41 двигателя 11 изменяется. В этот момент времени, HV_ECU 22 отслеживает разность частот вращения между частотой вращения выходного вала 41 и частотой вращения выходного компонента 16.
[0158] Во время t5, определяется завершение синхронизации частоты вращения. В это время, команда гидравлического управления первого устройства CL1 муфты задается таким образом, что гидравлическое давление первого устройства CL1 муфты полностью расцепляется (ссылка 14F с номером), и команда гидравлического управления второго устройства CL2 муфты задается таким образом, что гидравлическое давление второго устройства CL2 муфты повышается до гидравлического давления для зацепления (ссылка 14G с номером). Как результат, управление переключением "вниз" заканчивается. Когда устройство фрикционной муфты используется для первого устройства CL1 муфты и второго устройства CL2 муфты, как описано выше, когда первый режим и второй режим переключаются относительно друг друга, управление переключением зацепленного состояния первого устройства CL1 муфты и второго устройства CL2 муфты может выполняться параллельно. Таким образом, когда используется устройство фрикционной муфты, время для переключения между первым режимом и третьим режимом может сокращаться по сравнению со случаем использования муфты зубчатого типа, который подробно описывается ниже.
[0159] Фиг. 15 показывает кулачковую муфту 72, которая представляет собой пример устройства муфты зубчатого типа, используемого вместо устройства фрикционной муфты. Как показано на фиг. 15, кулачковая муфта 72 включает в себя шестерню 74 муфты, предусмотренную на шестерне 73, ступицу 76 муфты, соединенную с выходным валом 75, и соединительную втулку 77. На внешней периферии шестерни 74 муфты, формируются первые зубья 74a муфты. На внешней периферии ступицы 76 муфты, формируются вторые зубья 76a муфты. На внутренней периферии соединительной втулки 77, зацепляются третьи зубья 77a муфты. Соединительная втулка 77 является подвижной в направлении параллельно с выходным валом 75 между позицией зубчатого зацепления, в которой третьи зубья 77a муфты приводятся в зубчатое зацепление как с первыми зубьями 74a муфты, так со вторыми зубьями 76a муфты, и позицией без зубчатого зацепления, в которой третьи зубья 77a муфты расцепляются от любых из первых зубьев 74a муфты и вторых зубьев 76a муфты.
[0160] Фиг. 15 показывает состояние, в котором соединительная втулка 77 находится в позиции зацепления. В этом состоянии, кулачковая муфта 72 находится в зацепленном состоянии для передачи движущего крутящего момента, передаваемого из шестерни 74 муфты, на выходной вал 75. Таким образом, движущий крутящий момент, передаваемый из стороны входного вала посредством входной шестерни 78 (вращающегося элемента на входной стороне) и шестерни 73, приводимой в зубчатое зацепление с ней, выводится в выходную шестерню 80 (вращающийся элемент на выходной стороне), закрепленную на выходном валу 75. Когда соединительная втулка 77 находится в позиции без зубчатого зацепления, кулачковая муфта 72 находится в расцепленном состоянии, в котором движущий крутящий момент, передаваемый из входной шестерни 78, не передается на выходной вал 75. Перемещение соединительной втулки 77 выполняется посредством работы актуатора 81. Актуатор 81 включает в себя, например, гидравлический контроллер 21 и электромагнитную схему.
[0161] Первые зубья 74a муфты и третьи зубья 77a муфты и т.п. представляют собой примеры первых зубьев в варианте осуществления настоящего изобретения, и вторые зубья 76a муфты и третьи зубья 77a муфты и т.п. представляют собой примеры вторых зубьев в варианте осуществления настоящего изобретения. В качестве устройства муфты зубчатого типа, могут использоваться устройства с конструкцией, в которой соединительная втулка 77, показанная на фиг. 15, опускается, первые зубья, предусмотренные на элементе на входной стороне, и вторые зубья, предусмотренные на элементе на выходной стороне, размещаются напротив друг друга, и любые из первых зубьев и вторых зубьев перемещаются к другим посредством работы актуатора таким образом, что первые зубья и вторые зубья приводятся в зубчатое зацепление друг с другом.
[0162] Фиг. 16 является пояснительной схемой, указывающей переход номографической схемы, показывающей рабочее состояние, в котором третий режим переключается на первый режим, когда устройство муфты зубчатого типа используется для первого устройства CL1 муфты и второго устройства CL2 муфты. Устройство муфты зубчатого типа, например, представляет собой кулачковую муфту, показанную на фиг. 15. Когда третий режим переключается на первый режим, рабочее состояние изменяется на номографических схемах, показанных на фиг. 16, в порядке от номографической схемы (1), номографической схемы (2), номографической схемы (3), номографической схемы (4), номографической схемы (5) и номографической схемы (6). Номографическая схема (1) является номографической схемой, показывающей рабочее состояние в третьем режиме, номографическая схема (6) является номографической схемой, показывающей рабочее состояние в первом режиме, и номографические схемы (2)-(5) показывают состояние перехода с переключением с третьего режима на первый режим. Когда используется устройство кулачковой муфты, для первого устройства CL1 муфты и второго устройства CL2 муфты, состояние изменяется на второй режим, а не на состояние проскальзывания, в состоянии перехода с переключением по сравнению со случаем, в котором используется устройство фрикционной муфты, что является отличием.
[0163] Как показано на фиг. 16, номографическая схема (1) представляет собой состояние в третьем режиме, т.е. состояние, в котором первое устройство CL1 муфты зацепляется, и второе устройство CL2 муфты расцепляется. В этом состоянии, частота вращения выходного компонента 16 выше частоты вращения выходного вала 41 двигателя 11. Первый электромотор 12 выводит отрицательный крутящий момент при отрицательном вращении. Таким образом, состояние движения транспортного средства на номографической схеме (1), например, представляет собой состояние, в котором педаль акселератора нажимается (движение с использованием мощности), и движение с ускорением выполняется для уклона в подъем или ровной дороги (состояние высокой нагрузки с большой требуемой движущей силой). Когда педаль акселератора дополнительно нажимается на заданную величину или более в этом состоянии, и рабочая точка (точка, определенная посредством скорости транспортного средства и открытия акселератора) транспортного средства пересекает линию переключения "вниз" посредством использования карты переключения частоты вращения с использованием скорости транспортного средства и открытия акселератора согласно величине нажатия на педаль акселератора в качестве параметров, например, требуется переключение "вниз".
[0164] На номографической схеме (2), в ответ на запрос на переключение "вниз", частота вращения первого электромотора 12 управляется до тех пор, пока разность частот вращения между выходным валом 41 двигателя 11 и выходным компонентом 16 не попадет в заданный диапазон. Таким образом, выполняется управление, при котором первый электромотор 12 переключается с отрицательного вращения на прямое вращение, и частота вращения первого электромотора 12 повышается.
[0165] На номографической схеме (3), в момент времени, когда разность частот вращения между выходным валом 41 двигателя 11 и выходным компонентом 16 попадает в заданный диапазон, второе устройство CL2 муфты на расцепленной стороне переключается в зацепленное состояние. В это время, первое устройство CL1 муфты и второе устройство CL2 муфты изменяются на зацепленное состояние, т.е. на второй режим.
[0166] На номографической схеме (4), в момент времени, когда абсолютное значение разности частот вращения между целевой частотой вращения двигателя и фактической частотой вращения двигателя попадает в заданный диапазон, первое устройство CL1 муфты на зацепленной стороне переключается в расцепленную сторону.
[0167] В рабочем состоянии номографической схемы (5), поскольку первое устройство CL1 муфты на зацепленной стороне расцепляется, рабочий режим, в котором задается модуль 10 привода, задается в качестве первого режима. Как результат, выходной крутящий момент первого электромотора 12 изменяется на противоположное с отрицательного крутящего момента на направленный вперед крутящий момент, и первый электромотор 12 задается с возможностью функционировать в качестве электромотора.
[0168] На номографической схеме (6), выполняется управление, при котором частота вращения первого электромотора 12 понижается, и частота вращения выходного вала 41 двигателя 11 увеличивается. В этом состоянии, полный крутящий момент из направленного вперед движущего крутящего момента (направленного вверх крутящего момента), сформированного посредством второго электромотора 13, и движущего крутящего момента (направленного вверх крутящего момента), сформированного посредством двигателя 11, противодействует сопротивлению движению (направленному вниз крутящему моменту). Посредством управления увеличением частоты вращения выходного вала 41 двигателя 11 и частоты вращения ротора 49 второго электромотора 13, повышается частота вращения выходного компонента 16.
[0169] Фиг. 17 является пояснительным видом, показывающим пример изменения частот вращения первого электромотора 12, двигателя 11 и выходного компонента 16, соответствующего переходу рабочего режима, показанного на фиг. 16. Номера (1)-(6), показанные на фиг. 17, соответствуют номерам номографических схем, показанных на фиг. 16. Ссылка 68 с номером обозначает частота вращения первого электромотора 12, ссылки 69 с номером - частоту вращения выходного вала 41 двигателя 11, и ссылка 70 с номером - частоту вращения выходного компонента 16, соответственно.
[0170] Как показано на фиг. 17, частоты 68 и 69 вращения ротора 43 первого электромотора 12 и выходного вала 41 двигателя 11 управляются таким образом, что они приближаются к частоте вращения выходного компонента 16 до того, как рабочий режим изменяется с третьего режима на второй режим. После этого, когда разность частот вращения между выходным компонентом 16 и выходным валом 41 двигателя 11 попадает в заданный диапазон, второе устройство CL2 муфты зацепляется, и после этого первое устройство CL1 муфты расцепляется. Как описано выше, в случае кулачковой муфты, если разность частот вращения между вращающимся элементом на входной стороне и вращающимся элементом на выходной стороне содержится в пределах заданного диапазона, зубья муфты могут деформироваться, или толчок от флуктуации может возникать в движущем крутящем моменте при зацеплении или расцеплении. Таким образом, когда используется устройство муфты зубчатого типа, поскольку управление проскальзыванием не может выполняться по сравнению с использованием устройства фрикционной муфты, показанного на фиг. 11 и 12, переключение устройства муфты на зацепленной стороне и устройства муфты на расцепленной стороне не может выполняться параллельно. Таким образом, состояние зацепления переключается в порядке устройства муфты на расцепленной стороне и устройства муфты на зацепленной стороне, и в силу этого управление переключением режима требует времени. Тем не менее, когда используется устройство муфты зубчатого типа, конструкция устройства муфты может быть более упрощенной по сравнению со случаем использования устройства фрикционной муфты.
[0171] Фиг. 18 показывает пример процедуры управления HV_ECU 22, когда третий режим переключается на первый режим, показанный на фиг. 16. Процедура работы, показанная на фиг. 18, представляет собой процедуру работы, когда первое устройство CL1 муфты и второе устройство CL2 муфты представляют собой, например, устройства муфты зубчатого типа или кулачковую муфту. Блок-схема последовательности операций способа, показанная на фиг. 18, многократно выполняется каждое заданное время.
[0172] Как показано на фиг. 18, на этапе S20, собирается такая информация, как скорость транспортного средства, открытие акселератора и текущий рабочий режим, и процедура переходит к этапу S21.
[0173] На этапе S21, целевая рабочая точка двигателя (целевая частота Ne_trg вращения двигателя и целевой крутящий момент двигателя) определяется на основе открытия акселератора и скорости транспортного средства. После этого, процедура переходит к этапу S22.
[0174] На этапе S22, определяется то, превышает или нет целевая частота Ne_trg вращения двигателя частоту Nr2 вращения выходного компонента 16. Если целевая частота Ne_trg вращения двигателя превышает частоту Nr2 вращения выходного компонента 16 (в случае стороны "Да"), процедура переходит к этапу S23, чтобы выполнять управление переключением "вниз", тогда как если нет (в случае стороны "Нет"), процедура переходит к этапу S24.
[0175] На этапе S23, определяется то, выше или нет частота Nr2 вращения выходного компонента 16 пятого порогового значения ΔNth5. Пятое пороговое значение ΔNth5, например, является пороговым значением для определения то, выше или нет частота Nr2 вращения выходного компонента 16 частоты вращения на холостом ходу двигателя 11, и значение согласно модели транспортного средства и т.п. определяется заранее. Если частота Nr2 вращения выше пятого порогового значения ΔNth5 (в случае стороны "Да"), процедура переходит к этапу S25, в противном случае (в случае стороны "Нет"), процедура возвращается к этапу S20.
[0176] На этапе S25, чтобы зацеплять второе устройство CL2 муфты, которое представляет собой кулачковую муфту, определяется то, выше разность ΔN частот вращения между частотой Ne вращения двигателя и частотой Nr2 вращения выходного компонента 16 шестого порогового значения ΔNth6 и меньше седьмого порогового значения ΔNth7 или нет, т.е. то, не превышает либо превышает разность ΔN частот вращения заданную частоту вращения. Если разность ΔN частот вращения выше шестого порогового значения ΔNth6 и меньше седьмого порогового значения ΔNth7 (в случае стороны "Да"), процедура переходит к этапу S26, в противном случае (в случае "Нет"), процедура возвращается к этапу S20. Таким образом, случай, в котором разность ΔN частот вращения выше шестого порогового значения ΔNth6 и меньше седьмого порогового значения ΔNth7, соответствует рабочему состоянию номографической схемы (2), показанной на фиг. 16.
[0177] На этапе S26, выполняется управление переключением второго устройства CL2 муфты, расцепленного перед переключением частоты вращения, в зацепленное состояние, и после этого процедура переходит к этапу S27. Рабочее состояние на этапе S26 соответствует рабочему состоянию на номографической схеме (3), показанной на фиг. 16.
[0178] На этапе S27, определяется то, завершается или нет зацепление второго устройства CL2 муфты. Это определение выполняется, например, посредством того, не превышает либо превышает разность частот вращения между частотой вращения вращающегося элемента на входной стороне и частотой вращения вращающегося элемента на выходной стороне, составляющего второе устройство CL2 муфты, заданную частоту вращения. Если определено то, что зацепление второго устройства CL2 муфты завершается (в случае стороны "Да"), процедура переходит к этапу S28, тогда как если нет (в случае стороны "Нет"), процедура возвращается к этапу S26, и управление зацеплением продолжается.
[0179] На этапе S28, определяется то, не превышает либо превышает абсолютное значение разности ΔNe частот вращения между целевой частотой Ne_trg вращения двигателя и частотой Ne вращения двигателя восьмое пороговое значение ΔNth8. Если абсолютное значение разности ΔNe частот вращения не превышает восьмое пороговое значение ΔNth8 (в случае стороны "Да"), процедура переходит к этапу S29, в противном случае (в случае стороны "Нет"), процедура переходит к этапу S30.
[0180] На этапе S29, поддерживается второй режим. Таким образом, тот факт, что процедура переходит к этапу S29, означает то, что разность частот вращения между целевой частотой Ne_trg вращения двигателя и частотой Ne вращения двигателя является небольшой, и в силу этого оно представляет собой состояние, в котором частота Ne вращения двигателя не должна увеличиваться/снижаться. Таким образом, в этом состоянии, поддерживается состояние, в котором первое устройство CL1 муфты и второе устройство CL2 муфты удерживаются зацепленными, т.е. состояние второго режима.
[0181] С другой стороны, на этапе S30, выполняется управление переключением первого устройства CL1 муфты, зацепленного перед переключением частоты вращения, в расцепленное состояние. Таким образом, тот факт, что процедура переходит к этапу S30, означает то, что разность частот вращения между целевой частотой Ne_trg вращения двигателя и частотой Ne вращения двигателя является большой, и в силу этого частота Ne вращения двигателя должна увеличиваться/снижаться. Таким образом, первое устройство CL1 муфты переключается в расцепленное состояние, за счет чего режим изменяется на первый режим.
[0182] На этапе S31, определяется то, завершается или нет расцепление первого устройства CL1 муфты. Это определение выполняется, например, посредством того, не превышает либо превышает разность частот вращения между частотой вращения вращающегося элемента на входной стороне и частотой вращения вращающегося элемента на выходной стороне, составляющего первое устройство CL1 муфты, заданную частоту вращения. Если расцепление первого устройства CL1 муфты завершается (в случае стороны "Да"), процедура переходит к этапу S32, в противном случае (в случае стороны "Нет"), процедура возвращается к этапу S30, и управление расцеплением продолжается.
[0183] На этапе S32, в ответ на завершение переключения первого устройства CL1 муфты в расцепленное состояние, определяется то, что режим изменен на первый режим.
[0184] С другой стороны, если на этапе S22 определяется то, что целевая частота Ne_trg вращения двигателя меньше частоты Nr2 вращения выходного компонента 16, процедура переходит к этапу S24.
[0185] На этапе S24, определяется то, может или нет выполняться работа двигателя в прерывистом режиме, при которой повторяются прекращение работы и повторный запуск двигателя 11. Это определение выполняется, например, на основе состояния движения транспортного средства и состояния аккумулятора 33. Состояние движения транспортного средства включает в себя, например, состояние ухудшения характеристик катализатора очистки выхлопных газов. Если определено то, что работа двигателя в прерывистом режиме может выполняться (в случае стороны "Да"), процедура переходит к этапу S33, который представляет собой, например, процедуру EV-движения для выполнения пятого режима. Если нет (в случае стороны "Нет"), процедура переходит к этапу S32, и третий режим поддерживается.
[0186] На этапе S33, управление прекращением работы двигателя 11 выполняется для того, чтобы переходить к EV-движению, и после этого выполняется управление зацеплением тормозного устройства BK. После этого, процедура переходит к этапу S34. На этапе S34, выводится сигнал, указывающий то, что переход в пятый режим, показанный на фиг. 3, завершается.
[0187] На блок-схеме последовательности операций способа, показанной на фиг. 18, когда разность частот вращения между частотой Ne вращения двигателя и частотой Nr2 вращения выходного компонента 16 составляет заданную частоту вращения или меньше (синхронную частоту вращения), первое устройство CL1 муфты, расцепленное перед переключением частоты вращения, зацепляется, и после этого второе устройство CL2 муфты, зацепленное перед переключением частоты вращения, расцепляется, но настоящее изобретение не ограничено этим, и, например, первое устройство CL1 муфты может зацепляться, и второе устройство CL2 муфты может расцепляться параллельно с этим на синхронной частоте вращения.
[0188] Кроме того, когда используется устройство муфты зубчатого типа с автоматическим зацеплением или расцеплением посредством включения поджимающего элемента для поджатия к зацеплению или расцеплению, когда разность частот вращения между частотой Ne вращения двигателя и частотой Nr2 вращения выходного компонента 16 представляет собой заданную частоту вращения или меньше, может опускаться обработка определения для определения того, не превышает либо превышает разность ΔN частот вращения между частотой Ne вращения двигателя и частотой Nr2 вращения выходного компонента 16 заданную частоту вращения, на этапе S25.
[0189] Фиг. 19 показывает переход номографической схемы, представляющей рабочее состояние, когда первый режим переключается на третий режим, когда устройство муфты зубчатого типа используется для первого устройства CL1 муфты и второго устройства CL2 муфты. Когда первый режим переключается на третий режим, рабочее состояние изменяется на номографических схемах, показанных на фиг. 19, в порядке от номографической схемы (1), номографической схемы (2), номографической схемы (3), номографической схемы (4), номографической схемы (5) и номографической схемы (6) с верхней стороны. Переход рабочего состояния, показанный на фиг. 19, является противоположным переходу рабочего состояния, когда третий режим переключается на первый режим, показанный на фиг. 16, с точки зрения порядка номографических схем.
[0190] Таким образом, как показано на фиг. 19, номографическая схема (1) представляет собой состояние в первом режиме, т.е. состояние, в котором первое устройство CL1 муфты расцепляется, и второе устройство CL2 муфты зацепляется. В этом состоянии, частота вращения выходного компонента 16 выше частоты вращения выходного вала 41 двигателя 11. Первый электромотор 12 выводит направленный вперед крутящий момент при прямом вращении и функционирует в качестве электромотора. Таким образом, состояние движения на номографической схеме (1) представляет собой состояние, в котором транспортное средства начинает движение вперед из остановленного состояния, т.е. состояние, в котором педаль акселератора нажимается (движение с использованием мощности). В этом состоянии, когда рабочая точка транспортного средства пересекает линию переключения "вверх" посредством использования карты переключения частоты вращения со скоростью транспортного средства и открытием акселератора в качестве параметров, требуется переключение "вверх".
[0191] На номографической схеме (2), в ответ на запрос на переключение "вверх", выполняется управление увеличением частоты вращения первого электромотора 12 до тех пор, пока разность частот вращения между выходным валом 41 двигателя 11 и выходным компонентом 16 не будет содержаться в пределах заданного диапазона.
[0192] На номографической схеме (3), разность частот вращения между частотой вращения выходного вала 41 двигателя 11 и частотой вращения выходного компонента 16 становится заданным числом оборотов или меньше. В этот момент времени, первое устройство CL1 муфты на расцепленной стороне переключается в зацепленное состояние.
[0193] На номографической схеме (4), посредством обнаружения того, что абсолютное значение разности частот вращения между целевой частотой вращения двигателя и фактической частотой вращения двигателя содержится в пределах заданного диапазона, второе устройство CL2 муфты на зацепленной стороне переключается в расцепленное состояние.
[0194] В рабочем состоянии на номографической схеме (5), когда второе устройство CL2 муфты на зацепленной стороне расцепляется, рабочий режим, в котором задается модуль 10 привода, задается в качестве третьего режима. Как результат, первый электромотор 12 изменяется на противоположное с направленного вперед крутящего момента на отрицательный крутящий момент, и первый электромотор 12 задается с возможностью функционировать в качестве рекуперации.
[0195] На номографической схеме (6), выполняется управление, при котором частота вращения первого электромотора 12 понижается, и частота вращения выходного вала 41 двигателя 11 понижается. В этом состоянии, против сопротивления движению (направленного вниз крутящего момента), выступает движущий крутящий момент, в котором направленный вперед крутящий момент (направленный вверх крутящий момент), сформированный посредством второго электромотора 13 и движущего крутящего момента (направленного вверх крутящего момента), сформированного посредством двигателя 11, суммируются друг с другом.
[0196] Фиг. 20 является пояснительным видом, показывающим изменение частот вращения первого электромотора 12, двигателя 11 и выходного компонента 16, соответствующее переходу рабочего режима, показанного на фиг. 19. Номера (1)-(6), показанные на фиг. 20, соответствуют номерам на номографической схеме, показанной на фиг. 19. Ссылка 68 с номером обозначает частота вращения первого электромотора 12, ссылка 69 с номером обозначает частоту вращения выходного вала 41 двигателя 11, и ссылка 70 с номером обозначает частоту вращения выходного компонента 16, соответственно.
[0197] Как показано на фиг. 20, частоты 68 и 69 вращения ротора 43 первого электромотора 12 и выходного вала 41 двигателя 11 управляются таким образом, что они приближаются к частоте вращения выходного компонента 16 до того, как рабочий режим изменяется с первого режима на второй режим. После этого, когда разность частот вращения между частотой вращения выходного компонента 16 и частотой вращения выходного вала 41 двигателя 11 становится частотой вращения, не большей заданной частоты вращения, т.е. когда передаточное отношение сложного планетарного зубчатого механизма 17 приближается к 1, первое устройство CL1 муфты переключается в зацепленное состояние, и после этого второе устройство CL2 муфты на зацепленной стороне переключается в расцепленное состояние.
[0198] Фиг. 21 показывает пример процедуры управления HV_ECU 22, когда первый режим переключается на третий режим, показанный на фиг. 19. Процедура работы, показанная на фиг. 21, представляет собой процедуру работы, когда первое устройство CL1 муфты и второе устройство CL2 муфты представляют собой, например, устройства муфты зубчатого типа, такие как кулачковая муфта. Блок-схема последовательности операций способа, показанная на фиг. 18, многократно выполняется каждое заданное время. Процедура работы, показанная на фиг. 21, имеет только операцию зацепления и операцию расцепления первого устройства CL1 муфты и второго устройства CL2 муфты, в отличие от процедуры работы, показанной на фиг. 18, и пояснение здесь упрощается.
[0199] Как показано на фиг. 21, на этапе S35, собирается такая информация, как скорость транспортного средства, открытие акселератора, текущий рабочий режим и т.п., и процедура переходит к этапу S36. На этапе S36, целевая рабочая точка двигателя определяется на основе открытия акселератора и скорости транспортного средства, и после этого процедура переходит к этапу S37.
[0200] На этапе S37, определяется то, меньше или нет целевая частота Ne_trg вращения двигателя частоты Nr2 вращения выходного компонента 16. Если целевая частота Ne_trg вращения двигателя меньше частоты Nr2 вращения выходного компонента 16 (в случае стороны "Да"), процедура переходит к этапу S38, в противном случае (в случае стороны "Нет"), процедура переходит к этапу S39.
[0201] На этапе S38, определяется то, выше или нет частота Nr2 вращения выходного компонента 16 девятого порогового значения ΔNth9. Девятое пороговое значение ΔNth9, например, является пороговым значением для определения того, выше или нет частота Nr2 вращения частоты вращения на холостом ходу двигателя 11, и значение согласно модели транспортного средства и т.п. определяется заранее. Если частота Nr2 вращения выходного компонента 16 выше девятого порогового значения ΔNth9 (в случае стороны "Да"), процедура переходит к этапу S40, тогда как если нет (в случае стороны "Нет"), процедура возвращается к этапу S35. Девятое пороговое значение ΔNth9 может составлять значение, идентичное пятому пороговому значению ΔNth5, показанному на фиг. 18.
[0202] На этапе S40, чтобы зацеплять первое устройство CL1 муфты, которое представляет собой кулачковую муфту, определяется то, выше разность ΔN частот вращения между частотой Ne вращения двигателя и частотой Nr2 вращения выходного компонента 16 десятого порогового значения ΔNth10 и меньше одиннадцатого порогового значения ΔNth11 или нет, т.е. то, составляет или нет разность ΔN частот вращения частоту вращения, не большую заданной частоты вращения. Если разность ΔN частот вращения выше десятого порогового значения ΔNth10 и меньше одиннадцатого порогового значения ΔNth11 (в случае стороны "Да"), процедура переходит к этапу S41, в противном случае (в случае стороны "Нет"), процедура возвращается к этапу S35. Таким образом, случай, в котором разность ΔN частот вращения выше десятого порогового значения ΔNth10 и меньше одиннадцатого порогового значения ΔNth11, соответствует рабочему состоянию на номографической схеме (2), показанной на фиг. 19. Десятое пороговое значение ΔNth10 и одиннадцатое пороговое значение ΔNth11 могут иметь значения, идентичные шестому пороговому значению ΔNth6 и седьмому пороговому значению ΔNth7, показанным на фиг. 18.
[0203] На этапе S41, управление переключением первого устройства CL1 муфты в зацепленное состояние выполняется, и процедура переходит к этапу S42. Рабочее состояние на этапе S41 соответствует рабочему состоянию на номографической схеме (3), показанной на фиг. 19. На этапе S42, определяется то, завершается или нет переключение первого устройства CL1 муфты в зацепленное состояние. Если определено то, что переключение первого устройства CL1 муфты в зацепленное состояние завершается (в случае стороны "Да"), процедура переходит к этапу S43, в противном случае (в случае стороны "Нет"), процедура возвращается к этапу S41, и управление переключением в зацепленное состояние продолжается.
[0204] На этапе S43, определяется то, не превышает либо превышает абсолютное значение разности ΔNe частот вращения между целевой частотой Ne_trg вращения двигателя и частотой Ne вращения двигателя двенадцатое пороговое значение Nth12. Если абсолютное значение дифференциального числа ΔNe не превышает двенадцатое пороговое значение Nth12 (в случае стороны "Да"), процедура переходит к этапу S44, тогда как если нет (в случае стороны "Нет"), процедура переходит к этапу S45. Одиннадцатое пороговое значение ΔNth11 может иметь значение, идентичное восьмому пороговому значению Nth8, показанному на фиг. 18. На этапе S44, второй режим поддерживается. С другой стороны, если процедура переходит к этапу S45, управление переключением второго устройства CL2 муфты в расцепленное состояние выполняется, и после этого процедура переходит к этапу S46.
[0205] На этапе S46, определяется то, завершается или нет переключение второго устройства CL2 муфты в расцепленное состояние. Если определено то, что переключение второго устройства CL2 муфты в расцепленное состояние завершается (в случае стороны "Да"), процедура переходит к этапу S47, в противном случае (в случае стороны "Нет"), процедура возвращается к этапу S45, и управление переключением в расцепленное состояние продолжается. На этапе S47, в ответ на завершение переключения второго устройства CL2 муфты в расцепленное состояние, сигнал, указывающий то, что переход в третий режим завершается, передается.
[0206] С другой стороны, если на этапе S37 определяется то, что целевая частота Ne_trg вращения двигателя превышает частоту Nr2 вращения выходного компонента 16, процедура переходит к этапу S39. На этапе S39, определяется то, может или нет выполняться работа двигателя в прерывистом режиме. Если определено то, что работа двигателя в прерывистом режиме может выполняться (в случае стороны "Да"), процедура переходит к этапу S48. В противном случае (в случае стороны "Нет"), процедура переходит к этапу S49, и первый режим поддерживается.
[0207] На этапе S48, чтобы переходить к EV-движению, управление прекращением работы двигателя 11 выполняется, и после этого выполняется управление зацеплением тормозного устройства BK. После этого, процедура переходит к этапу S50. На этапе S50, передается сигнал, указывающий то, что переход в четвертый режим, показанный на фиг. 3, завершается.
[0208] Второй вариант осуществления
Фиг. 22 показывает рабочее состояние первого режима, для которого задается модуль 10B привода, который представляет собой другой вариант осуществления модуля 10 привода, показанного фиг. 1. Первая ось 14A на номографической схеме, показанной на фиг. 22, показывает первое водило C1, с которым соединяется выходной вал 41 двигателя 11. Вторая ось 14B показывает первую солнечную шестерню S1, с которой соединяется ротор 43 первого электромотора 12. Третья ось 14C показывает первую коронную шестерню R1. Четвертая ось 15A показывает вторую солнечную шестерню S2, соединенную с выходным компонентом 16 (OUT). Пятая ось 15B показывает вторую коронную шестерню R2, с которой соединяется первая коронная шестерня R1. Шестая ось 15C показывает второе водило C2.
[0209] Модуль 10B привода, показанный на фиг. 22, отличается от модуля 10A привода, показанного на фиг. 2, в таком аспекте, что вторая солнечная шестерня S2 второго планетарного зубчатого механизма 15 соответствует четвертому вращательному элементу 28, и вторая коронная шестерня R2 соответствует пятому вращательному элементу 29, соответственно. Оставшееся второе водило C2 соответствует шестому вращательному элементу 30. В первом планетарном зубчатом механизме 14, первое водило C1 соответствует первому вращательному элементу 25, первая солнечная шестерня S1 соответствует второму вращательному элементу 26, и первая коронная шестерня R1 соответствует третьему вращательному элементу 27. Поскольку номографическая схема модуля 10B привода, показанного на фиг. 22, имеет компоновку вертикальной оси, которая является идентичной или аналогичной номографической схеме модуля 10A привода, показанного на фиг. 2, и подробное описание здесь опускается.
[0210] Первое устройство CL1 муфты избирательно соединяет вторую солнечную шестерню S2 и вторую коронную шестерню R2. Первое устройство CL1 муфты в этом варианте осуществления представляет собой пример первого зацепляющего устройства, избирательно соединяющего четвертый вращательный элемент 28 и пятый вращательный элемент 29. Второе устройство CL2 муфты избирательно соединяет первое водило C1 и второе водило C2. Тормозное устройство BK избирательно соединяет первое водило C1 (или входной вал 42) и закрепленный элемент 32.
[0211] Первый режим, в котором задается модуль 10B привода, показанный на фиг. 22, задается посредством расцепления первого устройства CL1 муфты и тормозного устройства BK и посредством зацепления второго устройства CL2 муфты. Поскольку рабочее состояние первого режима является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 4, подробное описание здесь опускается. Кроме того, для модуля 10B привода, показанного на фиг. 22, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 5-8, помимо первого режима.
[0212] Третий вариант осуществления
Фиг. 23 показывает рабочее состояние первого режима, для которого задается модуль 1°C привода, который представляет собой другой вариант осуществления модуля 10 привода, показанного на фиг 1. Номографическая схема модуля 1°C привода, показанная на фиг. 23, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 10A привода, показанного на фиг. 2. Модуль 1°C привода отличается от номографической схемы модуля 10A привода, показанного на фиг. 2, в таком аспекте, что вторая ось 14B представляет первую коронную шестерню R1, и третья ось 14C - для первой солнечной шестерни S1. Оставшаяся четвертая ось 15A представляет вторую коронную шестерню R2, пятая ось 15B - для второй солнечной шестерни S2, первая ось 14A - для первого водила C1, и шестая ось 15C - для второго водила C2.
[0213] Таким образом, модуль 1°C привода, показанный на фиг. 23, отличается от модуля 10A привода, показанного на фиг. 2, в таком аспекте, что первая коронная шестерня R1 соответствует второму вращательному элементу 26, а первая солнечная шестерня S1 - третьему вращательному элементу 27. Оставшееся первое водило C1 соответствует первому вращательному элементу 25, вторая коронная шестерня R2 - четвертому вращательному элементу 28, вторая солнечная шестерня S2 - пятому вращательному элементу 29, и второе водило C2 - шестому вращательному элементу 30.
[0214] Первое устройство CL1 муфты избирательно соединяет вторую коронную шестерню R2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первое водило C1 и второе водило C2. Тормозное устройство BK избирательно соединяет первое водило C1 (или входной вал 42) и закрепленный элемент 32.
[0215] Как показано на фиг. 23, первый режим, в котором задается модуль 1°C привода, задается посредством расцепления первого устройства CL1 муфты и тормозного устройства BK и посредством зацепления второго устройства CL2 муфты. Поскольку рабочее состояние первого режима является идентичным или аналогичным рабочему состоянию первого режима, показанного на фиг. 4, подробное описание здесь опускается. Кроме того, для модуля 1°C привода, показанного на фиг. 23, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 5-8, помимо первого режима.
[0216] Четвертый вариант осуществления
Фиг. 24 показывает рабочее состояние первого режима, для которого задается модуль 10D привода, который представляет собой другой вариант осуществления модуля 10 привода, показанного на фиг. 1. Номографическая схема модуля 10D привода, показанная на фиг. 24, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 10A привода, показанного на фиг. 2. Модуль 10D привода отличается от номографической схемы модуля 10A привода, показанного на фиг. 2, в таком аспекте, что вторая ось 14B представляет первую коронную шестерню R1, третья ось 14C - для первой солнечной шестерни S1, четвертая ось 15A - для второй солнечной шестерни S2, и пятая ось 15B - для второй коронной шестерни R2. Оставшаяся первая ось 14A представляет первое водило C1, и шестая ось 15C - для второго водила C2.
[0217] Таким образом, модуль 10D привода, показанный на фиг. 24, отличается от модуля 10A привода, показанного на фиг. 2, в таком аспекте, что первая коронная шестерня R1 соответствует второму вращательному элементу 26, первая солнечная шестерня S1 - третьему вращательному элементу 27, вторая коронная шестерня R2 - четвертому вращательному элементу 28, и вторая солнечная шестерня S2 - пятому вращательному элементу 29. Оставшееся первое водило C1 соответствует первому вращательному элементу 25, и второе водило C2 - шестому вращательному элементу 30.
[0218] Первое устройство CL1 муфты избирательно соединяет вторую солнечную шестерню S2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первое водило C1 и второе водило C2. Тормозное устройство BK избирательно соединяет первое водило C1 (или входной вал 42) и закрепленный элемент 32.
[0219] Как показано на фиг. 24, первый режим, в котором задается модуль 10D привода, задается посредством расцепления первого устройства CL1 муфты и тормозного устройства BK и посредством зацепления второго устройства CL2 муфты. Поскольку рабочее состояние первого режима является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 4, подробное описание здесь опускается. Кроме того, для модуля 10D привода, показанного на фиг. 24, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 5-8, помимо первого режима.
[0220] Пятый вариант осуществления
Фиг. 25 показывает рабочее состояние первого режима, для которого задается модуль 10E привода, который представляет собой другой вариант осуществления модуля 10 привода, показанного на фиг. 1. Номографическая схема модуля 10E привода, показанная на фиг. 25, имеет конструкцию, в которой третья ось 14C размещается между второй осью 14B, расположенной на самой левой стороне на чертеже, и первой осью 14A на правой стороне, и пятая ось 15B перекрывается с третьей осью 14C, шестая ось 15C - с первой осью 14A, соответственно, и четвертая ось 15A размещается на правой стороне от первой оси 14A. В модуле 10E привода, первая ось 14A представляет первую коронную шестерню R1, вторая ось 14B представляет первую солнечную шестерню S1, третья ось 14C - для первого водила C1, четвертая ось 15A - для второй коронной шестерни R2, пятая ось 15B - для второй солнечной шестерни S2 и шестая ось 15C - для второго водила C2.
[0221] Таким образом, в модуле 10E привода, показанном на фиг. 25, первая коронная шестерня R1 соответствует первому вращательному элементу 25, первая солнечная шестерня S1 - второму вращательному элементу 26, первое водило C1 - третьему вращательному элементу 27, вторая коронная шестерня R2 - четвертому вращательному элементу 28, вторая солнечная шестерня S2 - пятому вращательному элементу 29, и второе водило C2 - шестому вращательному элементу 30.
[0222] Первое устройство CL1 муфты избирательно соединяет вторую солнечную шестерню S2 и второе водило C2. Первое устройство CL1 муфты в этом варианте осуществления представляет собой пример первого зацепляющего устройства для избирательного соединения пятого вращательного элемента 29 и шестого вращательного элемента 30. Второе устройство CL2 муфты избирательно соединяет первую коронную шестерню R1 и второе водило C2. Тормозное устройство BK избирательно соединяет первую коронную шестерню R1 (или входной вал 42) и закрепленный элемент 32.
[0223] Как показано на фиг. 25, первый режим, в котором задается модуль 10E привода, задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты.
[0224] Фиг. 26 показывает пример рабочего режима, для которого задается модуль 10E привода, показанный на фиг. 25. Как показано на фиг. 26, рабочий режим, для которого задается модуль 10E привода, включает в себя первый-пятый режимы, идентично или аналогично описанию на фиг. 3. Состояние зацепления каждого из устройств CL1 и CL2 муфты для задания каждого режима от первого режима до пятого режима, как показано на фиг. 26, является таким, что состояния, показанные на фиг. 3, переключаются. Таким образом, состояние зацепления для рабочего режима, показанного на фиг. 26, является таким, что зацепление первого устройства CL1 муфты, показанного на фиг. 3, переключается на расцепление, а расцепление - на зацепление, а зацепление второго устройства CL2 муфты - на расцепление, и расцепление - на зацепление.
[0225] Рабочее состояние первого режима является таким, что второй планетарный зубчатый механизм 15 вращается как единое целое посредством зацепления первого устройства CL1 муфты. Вторая солнечная шестерня S2 вращается как единое целое с первым водилом C1. Линия, представляющая первый планетарный зубчатый механизм 14, имеет первое водило C1 в качестве выходного элемента, первую коронную шестерню R1, в которую вводится движущая сила, сформированная посредством двигателя 11, в качестве входного элемента, и первую солнечную шестерню S1 в качестве реактивного элемента. Первый электромотор 12 управляется таким образом, что реактивный крутящий момент вводится в первую солнечную шестерню S1. В этом первом режиме, поскольку частота вращения выходного компонента 16 ниже частоты вращения выходного вала 41 двигателя 11, задается позиция шестерни в "нижнем" режиме (понижающей передачи).
[0226] Фиг. 27 показывает рабочее состояние второго режима, для которого задается модуль 10E привода, показанный на фиг. 25. Как показано на фиг. 27, второй режим, для которого задается модуль 10E привода, задается посредством зацепления первого устройства CL1 муфты и второго устройства CL2 муфты и посредством расцепления тормозного устройства BK. Поскольку рабочее состояние второго режима является практически идентичным или аналогичным действию рабочего состояния второго режима, показанного на фиг. 5, подробное описание здесь опускается.
[0227] Фиг. 28 показывает рабочее состояние третьего режима, для которого задается модуль 10E привода, показанный на фиг. 25. Как показано на фиг. 28, третий режим, для которого задается модуль 10E привода, задается посредством расцепления первого устройства CL1 муфты и тормозного устройства BK и посредством зацепления второго устройства CL2 муфты. Третий режим, показанный на фиг. 28, представляет собой HV-режим для движения посредством использования движущей силы, полученной посредством суммирования движущей силы, сформированной посредством двигателя 11, и движущей силы, сформированной посредством второго электромотора 13, который является идентичным или аналогичным третьему режиму, описанному на фиг. 6. Между первым планетарным зубчатым механизмом 14 и вторым планетарным зубчатым механизмом 15, в дополнение к соединению между первой коронной шестерней R1 и второй солнечной шестерней S2, зацепление второго устройства CL2 муфты приводит первое водило C1 и второе водило C2 в соединенное состояние. Как результат, фиг. 28 становится номографической схемой, на которой линии, представляющие частоты вращения трех вращательных элементов, составляющих первый планетарный зубчатый механизм 14, и линии, представляющие частоты вращения трех вращательных элементов, составляющих второй планетарный зубчатый механизм 15, перекрываются между собой. В этом третьем режиме, поскольку частота вращения выходного компонента 16 выше частоты вращения выходного вала 41 двигателя 11, задается позиция шестерни в "верхнем" режиме (повышающей передачи). Для модуля 10E привода, показанного на фиг. 28, может задаваться режим, который является идентичным или аналогичным четвертому режиму и пятому режиму, показанным на фиг. 7-8, помимо первого-третьего режимов.
[0228] Шестой вариант осуществления
Фиг. 29 показывает рабочее состояние первого режима, для которого задается модуль 10F привода, который представляет собой другой вариант осуществления модуля 10 привода, показанного на фиг. 1. Номографическая схема модуля 10F привода, показанная на фиг. 29, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 10E привода, показанного на фиг. 25. Модуль 10F привода отличается от номографической схемы модуля 10E привода, показанного на фиг. 25, в таком аспекте, что четвертая ось 15A представляет вторую солнечную шестерню S2, и пятая ось 15B - для второй коронной шестерни R2. Таким образом, модуль 10F привода, показанный на фиг. 29, отличается от модуля 10E привода, показанного на фиг. 25, в таком аспекте, что вторая солнечная шестерня S2 соответствует четвертому вращательному элементу 28, и вторая коронная шестерня R2 - пятому вращательному элементу 29.
[0229] Поскольку операция зацепления для рабочего режима, для которого задается модуль 10F привода, является аналогичной или идентичной операции зацепления, описанной на фиг. 26, подробное описание здесь опускается. Первое устройство CL1 муфты избирательно соединяет вторую коронную шестерню R2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первую коронную шестерню R1 и второе водило C2. Тормозное устройство BK избирательно соединяет первую коронную шестерню R1 (или входной вал 42) и закрепленный элемент 32.
[0230] Как показано на фиг. 29, первый режим, для которого задается модуль 10F привода, задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты. Поскольку рабочее состояние первого режима является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 25, подробное описание здесь опускается. Кроме того, для модуля 10F привода, показанного на фиг. 29, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 5-8, помимо первого режима.
[0231] Седьмой вариант осуществления
Фиг. 30 показывает рабочее состояние первого режима, для которого задается модуль 10G привода, который представляет собой другой вариант осуществления модуля 10 привода, показанного на фиг. 1. Номографическая схема модуля 10G привода, показанная на фиг. 30, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 10E привода, показанного на фиг. 25. Модуль 10G привода отличается от номографической схемы модуля 10E привода, показанного на фиг. 25, в таком аспекте, что первая ось 14A представляет первую солнечную шестерню S1, и вторая ось 14B - для первой коронной шестерни R1. Таким образом, модуль 10G привода, показанный на фиг. 30, отличается от модуля 10E привода, показанного на фиг. 25, в таком аспекте, что первая солнечная шестерня S1 соответствует первому вращательному элементу 25, и первая коронная шестерня R1 - второму вращательному элементу 26.
[0232] Поскольку операция зацепления для рабочего режима, для которого задается модуль 10G привода, является идентичной или аналогичной операции зацепления, описанной на фиг. 26, подробное описание здесь опускается. Первое устройство CL1 муфты избирательно соединяет вторую солнечную шестерню S2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первую солнечную шестерню S1 и второе водило C2. Тормозное устройство BK избирательно соединяет первую солнечную шестерню S1 (или входной вал 42) и закрепленный элемент 32.
[0233] Как показано на фиг. 30, первый режим, для которого задается модуль 10G привода, задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты. Поскольку рабочее состояние первого режима является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 25, подробное описание здесь опускается. Кроме того, для модуля 10G привода, показанного на фиг. 30, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 5-8, помимо первого режима.
[0234] Восьмой вариант осуществления
Фиг. 31 показывает рабочее состояние первого режима, для которого задается модуль 10H привода, который представляет собой другой вариант осуществления модуля 10 привода, показанного на фиг. 1. Номографическая схема модуля 10H привода, показанная на фиг. 31, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 10E привода, показанного на фиг. 25. Модуль 10H привода отличается от номографической схемы модуля 10E привода, показанного на фиг. 25, в таком аспекте, что первая ось 14A представляет первую солнечную шестерню S1, вторая ось 14B - для первой коронной шестерни R1, четвертая ось 15A - для второй солнечной шестерни S2, и пятая ось 15B - для второй коронной шестерни R2. Таким образом, модуль 10H привода, показанный на фиг. 31, отличается от модуля 10E привода, показанного на фиг. 25, в таком аспекте, что первая солнечная шестерня S1 соответствует первому вращательному элементу 25, первая коронная шестерня R1 - второму вращательному элементу 26, вторая солнечная шестерня S2 - пятому вращательному элементу 29, и вторая коронная шестерня R2 - четвертому вращательному элементу 28.
[0235] Поскольку операция зацепления для рабочего режима, для которого задается модуль 10H привода, является идентичной или аналогичной операции зацепления, описанной на фиг. 26, подробное описание здесь опускается. Первое устройство CL1 муфты избирательно соединяет вторую коронную шестерню R2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первую солнечную шестерню S1 и второе водило C2. Тормозное устройство BK избирательно соединяет первую солнечную шестерню S1 (или входной вал 42) и закрепленный элемент 32.
[0236] Как показано на фиг. 31, первый режим, для которого задается модуль 10H привода, задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты. Поскольку рабочее состояние первого режима является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 25, подробное описание здесь опускается. Кроме того, для модуля 10H привода, показанного на фиг. 31, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 5-8, помимо первого режима.
[0237] Фиг. 32 концептуально показывает модуль 82 привода другого варианта осуществления настоящего изобретения. Как показано на фиг. 32, модуль 82 привода отличается от модуля 10 привода, показанного на фиг. 1, в таком аспекте, что второе устройство CL2 муфты избирательно соединяет второй вращательный элемент 26 и шестой вращательный элемент 30. На фиг. 32, идентичные ссылки с номерами предоставляются элементам, которые являются идентичными или аналогичными элементам, описанным в модуле 10 привода, показанном на фиг. 1, и подробное описание здесь опускается.
[0238] Девятый вариант осуществления
Фиг. 33 показывает первый режим, для которого задается модуль 82A привода, который представляет собой дополнительно осуществленный пример модуля 82 привода, показанного на фиг. 32. В модуле 82A привода, показанном на фиг. 33, первое водило C1 соответствует первому вращательному элементу 25, первая солнечная шестерня S1 - второму вращательному элементу 26, и первая коронная шестерня R1 - третьему вращательному элементу 27. Во втором планетарном зубчатом механизме 15, второе водило C2 соответствует четвертому вращательному элементу 28, вторая солнечная шестерня S2 - пятому вращательному элементу 29, и вторая коронная шестерня R2 - шестому вращательному элементу 30. Модуль 82A привода сконструирован на номографической схеме таким образом, что вторая ось 14B, указывающая первую солнечную шестерню S1, четвертая ось 15A, указывающая второе водило C2, первая ось 14A, указывающая первое водило C1, и третья ось 14C, указывающая первую коронную шестерню R1, или пятая ось 15B, указывающая вторую солнечную шестерню S2, совмещаются в этом порядке.
[0239] Поскольку рабочий режим, для которого задается модуль 82A привода, например, является идентичным или аналогичным первому-пятому режимам, показанным на фиг. 3, и операции зацепления первого устройства CL1 муфты, второго устройства CL2 муфты и тормозного устройства BK, для которых задаются первый-пятый режимы, также являются идентичными или аналогичным операциям зацепления, показанным на фиг. 3, подробное описание здесь опускается.
[0240] Первое устройство CL1 муфты избирательно соединяет вторую коронную шестерню R2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первую солнечную шестерню S1 и вторую коронную шестерню R2. Тормозное устройство BK избирательно соединяет первое водило C1 (или входной вал 42) и закрепленный элемент 32. Рабочее состояние первого режима, показанное на фиг. 33, является практически идентичным или аналогичным первому режиму, показанному на фиг. 4. Таким образом, первый режим, для которого задается модуль 82A привода, задается посредством расцепления первого устройства CL1 муфты посредством зацепления второго устройства CL2 муфты и посредством расцепления тормозного устройства BK. Первый режим имеет номографическую схему, на которой шестая ось 15C перекрывается со второй осью 14B посредством зацепления второго устройства CL2 муфты.
[0241] Фиг. 34 показывает рабочее состояние второго режима, для которого задается модуль 82A привода, показанный на фиг. 33. Поскольку второй режим, показанный на фиг. 34, является практически идентичным или аналогичным второму режиму, показанному на фиг. 5, подробное описание здесь опускается.
[0242] Фиг. 35 показывает рабочее состояние третьего режима, для которого задается модуль 82A привода, показанный на фиг. 33. Поскольку третий режим, показанный на фиг. 35, является практически идентичным или аналогичным третьему режиму, показанному на фиг. 6, подробное описание здесь опускается.
[0243] Фиг. 36 показывает рабочее состояние четвертого режима, для которого задается модуль 82A привода, показанный на фиг. 33. Поскольку четвертый режим, показанный на фиг. 36, является практически идентичным или аналогичным четвертому режиму, показанному на фиг. 7, подробное описание здесь опускается.
[0244] Фиг. 37 показывает рабочее состояние пятого режима, для которого задается модуль 82A привода, показанный на фиг. 33. Поскольку четвертый режим, показанный на фиг. 37, является практически идентичным или аналогичным пятому режиму, показанному на фиг. 8, подробное описание здесь опускается.
[0245] Десятый вариант осуществления
Фиг. 38 показывает рабочее состояние первого режима, для которого задается модуль 82B привода, который представляет собой другой вариант осуществления модуля 82 привода, показанного на фиг. 32. Номографическая схема модуля 82B привода, показанная на фиг. 38, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 82A привода, показанного на фиг. 33. Модуль 82B привода отличается от номографической схемы модуля 82A привода, показанного на фиг. 33, в таком аспекте, что пятая ось 15B представляет вторую коронную шестерню R2, и шестая ось 15C представляет вторую солнечную шестерню S2. Таким образом, модуль 82B привода отличается от модуля 82A привода, показанного на фиг. 33, в таком аспекте, что вторая коронная шестерня R2 соответствует пятому вращательному элементу 29, и вторая солнечная шестерня S2 - шестому вращательному элементу 30.
[0246] Операция зацепления для рабочего режима, для которого задается модуль 82B привода, является идентичной рабочим состояниям первого устройства CL1 муфты и второго устройства CL2 муфты, показанных на фиг. 3. Первое устройство CL1 муфты избирательно соединяет вторую солнечную шестерню S2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первую солнечную шестерню S1 и вторую солнечную шестерню S2. Тормозное устройство BK избирательно соединяет первое водило C1 (или входной вал 42) и закрепленный элемент 32.
[0247] Как показано на фиг. 38, первый режим, для которого задается модуль 82B привода, задается посредством расцепления первого устройства CL1 муфты и тормозного устройства BK и посредством зацепления второго устройства CL2 муфты. Поскольку рабочее состояние первого режима, показанного на фиг. 38, является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 33, подробное описание здесь опускается. Кроме того, для модуля 82B привода, показанного на фиг. 38, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 34-37, помимо первого режима.
[0248] Одиннадцатый вариант осуществления
Фиг. 39 показывает рабочее состояние первого режима, для которого задается модуль 82C привода, который представляет собой другой вариант осуществления модуля 82 привода, показанного на фиг. 32. Номографическая схема модуля 82C привода, показанная на фиг. 39, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 82A привода, показанного на фиг. 33. Модуль 82C привода отличается от номографической схемы модуля 82A привода, показанного на фиг. 33, в таком аспекте, что вторая ось 14B представляет первую коронную шестерню R1, третья ось 14C представляет первую солнечную шестерню S1, пятая ось 15B - для второй коронной шестерни R2, и шестая ось 15C - для второй солнечной шестерни S2. Таким образом, модуль 82C привода отличается от модуля 82A привода, показанного на фиг. 33, в таком аспекте, что первая коронная шестерня R1 соответствует второму вращательному элементу 26, первая солнечная шестерня S1 - третьему вращательному элементу 27, вторая коронная шестерня R2 - пятому вращательному элементу 29, и вторая солнечная шестерня S2 - шестому вращательному элементу 30.
[0249] Операция зацепления для рабочего режима, для которого задается модуль 82C привода, является идентичной рабочим состояниям первого устройства CL1 муфты и второго устройства CL2 муфты, показанных на фиг. 3. Первое устройство CL1 муфты избирательно соединяет вторую солнечную шестерню S2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первую коронную шестерню R1 и вторую солнечную шестерню S2. Тормозное устройство BK избирательно соединяет первое водило C1 (или входной вал 42) и закрепленный элемент 32.
[0250] Как показано на фиг. 39, первый режим, для которого задается модуль 82C привода, задается посредством расцепления первого устройства CL1 муфты и тормозного устройства BK и посредством зацепления второго устройства CL2 муфты. Поскольку рабочее состояние первого режима, показанного на фиг. 39, является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 33, подробное описание здесь опускается. Кроме того, для модуля 82C привода, показанного на фиг. 39, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 34-37, помимо первого режима.
[0251] Двенадцатый вариант осуществления
Фиг. 40 показывает рабочее состояние первого режима, для которого задается модуль 82D привода, который представляет собой другой вариант осуществления модуля 82 привода, показанного на фиг. 32. Номографическая схема модуля 82D привода, показанная на фиг. 40, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 82A привода, показанного на фиг. 33. Модуль 82D привода отличается от номографической схемы модуля 82A привода, показанного на фиг. 33, в таком аспекте, что вторая ось 14B представляет первую коронную шестерню R1, и третья ось 14C представляет первую солнечную шестерню S1. Таким образом, модуль 82D привода отличается от модуля 82A привода, показанного на фиг. 33, в таком аспекте, что первая коронная шестерня R1 соответствует второму вращательному элементу 26, и первая солнечная шестерня S1 - третьему вращательному элементу 27.
[0252] Операция зацепления для рабочего режима, для которого задается модуль 82D привода, является идентичной рабочим состояниям первого устройства CL1 муфты и второго устройства CL2 муфты, показанных на фиг. 3. Первое устройство CL1 муфты избирательно соединяет вторую коронную шестерню R2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первую коронную шестерню R1 и вторую коронную шестерню R2. Тормозное устройство BK избирательно соединяет первое водило C1 (или входной вал 42) и закрепленный элемент 32.
[0253] Как показано на фиг. 40, первый режим, для которого задается модуль 82D привода, задается посредством расцепления первого устройства CL1 муфты и тормозного устройства BK и посредством зацепления второго устройства CL2 муфты. Поскольку рабочее состояние первого режима, показанного на фиг. 40, является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 33, подробное описание здесь опускается. Кроме того, для модуля 82D привода, показанного на фиг. 40, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 34-37, помимо первого режима.
[0254] Тринадцатый вариант осуществления
Фиг. 41 показывает рабочее состояние первого режима, для которого задается модуль 82E привода, который представляет собой другой вариант осуществления модуля 82 привода, показанного на фиг. 32. На номографической схеме модуля 82E привода, показанного на фиг. 41, третья ось 14C размещается между второй осью 14B, размещаемой на левой стороне на чертеже, и первой осью 14A, размещаемой на его правой стороне, третья ось 14C и пятая ось 15B, а также вторая ось 14B и шестая ось 15C перекрываются, соответственно, и четвертая ось 15A размещается на правой стороне от первой оси 14A. В модуле 82E привода, первая ось 14A представляет первую коронную шестерню R1, вторая ось 14B - для первой солнечной шестерни S1, третья ось 14C - для первого водила C1, четвертая ось 15A - для второй солнечной шестерни S2, пятая ось 15B - для второго водила C2, и шестая ось 15C - для второй коронной шестерни R2.
[0255] Поскольку операция зацепления для рабочего режима, для которого задается модуль 82E привода, является идентичной или аналогичной операции зацепления, описанной на фиг. 26, подробное описание здесь опускается. Первое устройство CL1 муфты избирательно соединяет вторую коронную шестерню R2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет первую солнечную шестерню S1 и вторую коронную шестерню R2. Тормозное устройство BK избирательно соединяет первую коронную шестерню R1 (или входной вал 42) и закрепленный элемент 32.
[0256] Как показано на фиг. 41, первый режим, для которого задается модуль 82E привода, задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты. Поскольку рабочее состояние первого режима, показанного на фиг. 41, является идентичным или аналогичным действию рабочего состояния первого режима, показанного на фиг. 33, подробное описание здесь опускается. Кроме того, для модуля 82E привода, показанного на фиг. 41, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 34-37, помимо первого режима.
[0257] Четырнадцатый вариант осуществления
Фиг. 42 показывает рабочее состояние первого режима, для которого задается модуль 82F привода, который представляет собой другой вариант осуществления модуля 82 привода, показанного на фиг. 32. Поскольку номографическая схема модуля 82F привода, показанного на фиг. 42, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 82E привода, показанного на фиг. 40, подробное описание здесь опускается. Модуль 82F привода отличается от номографической схемы модуля 82E привода, показанного на фиг. 41, в таком аспекте, что четвертая ось 15A представляет вторую коронную шестерню R2, и шестая ось 15C представляет вторую солнечную шестерню S2.
[0258] Поскольку операция зацепления для рабочего режима, для которого задается модуль 82F привода, является идентичной или аналогичной операции зацепления, описанной на фиг. 26, подробное описание здесь опускается. Первое устройство CL1 муфты избирательно соединяет вторую солнечную шестерню S2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет вторую солнечную шестерню S2 и первую солнечную шестерню S1. Тормозное устройство BK избирательно соединяет первую коронную шестерню R1 (или входной вал 42) и закрепленный элемент 32.
[0259] Как показано на фиг. 42, первый режим, для которого задается модуль 82F привода, задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты. Поскольку рабочее состояние первого режима, показанного на фиг. 42, является практически идентичным или аналогичным рабочему состоянию первого режима, показанного на фиг. 33, подробное описание здесь опускается. Кроме того, для модуля 82F привода, показанного на фиг. 42, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 34-37, помимо первого режима.
[0260] Пятнадцатый вариант осуществления
Фиг. 43 показывает рабочее состояние первого режима, для которого задается модуль 82G привода, который представляет собой другой вариант осуществления модуля 82 привода, показанного на фиг. 32. Поскольку номографическая схема модуля 82G привода, показанного на фиг. 43, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 82E привода, показанного на фиг. 41, подробное описание здесь опускается. Модуль 82G привода отличается от номографической схемы модуля 82E привода, показанного на фиг. 41, в таком аспекте, что первая ось 14A представляет первую солнечную шестерню S1, вторая ось 14B - для первой коронной шестерни R1, четвертая ось 15A - для второй коронной шестерни R2, и шестая ось 15C представляет вторую солнечную шестерню S2.
[0261] Поскольку операция зацепления для рабочего режима, для которого задается модуль 82G привода, является идентичной или аналогичной операции зацепления, описанной на фиг. 26, подробное описание здесь опускается. Первое устройство CL1 муфты избирательно соединяет вторую солнечную шестерню S2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет вторую солнечную шестерню S2 и первую коронную шестерню R1. Тормозное устройство BK избирательно соединяет первую солнечную шестерню S1 (или входной вал 42) и закрепленный элемент 32.
[0262] Как показано на фиг. 43, первый режим, для которого задается модуль 82G привода, задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты. Поскольку рабочее состояние первого режима, показанного на фиг. 43, является практически идентичным или аналогичным рабочему состоянию первого режима, показанного на фиг. 33, подробное описание здесь опускается. Кроме того, для модуля 82G привода, показанного на фиг. 43, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 34-37, помимо первого режима.
[0263] Шестнадцатый вариант осуществления
Фиг. 44 показывает рабочее состояние первого режима, для которого задается модуль 82H привода, который представляет собой другой вариант осуществления модуля 82 привода, показанного на фиг. 32. Поскольку номографическая схема модуля 82H привода, показанного на фиг. 44, имеет компоновку вертикальных осей 14A-14C и 15A-15C, которая является идентичной или аналогичной компоновке на номографической схеме модуля 82E привода, показанного на фиг. 41, подробное описание здесь опускается. Модуль 82H привода отличается от номографической схемы модуля 82E привода, показанного на фиг. 41, в таком аспекте, что первая ось 14A представляет первую солнечную шестерню S1, и вторая ось 14B - для первой коронной шестерни R1.
[0264] Поскольку операция зацепления для рабочего режима, для которого задается модуль 82H привода, является идентичной или аналогичной операции зацепления, описанной на фиг. 26, подробное описание здесь опускается. Первое устройство CL1 муфты избирательно соединяет вторую коронную шестерню R2 и второе водило C2. Второе устройство CL2 муфты избирательно соединяет вторую коронную шестерню R2 и первую коронную шестерню R1. Тормозное устройство BK избирательно соединяет первую солнечную шестерню S1 (или входной вал 42) и закрепленный элемент 32.
[0265] Как показано на фиг. 44, первый режим, для которого задается модуль 82H привода, задается посредством расцепления второго устройства CL2 муфты и тормозного устройства BK и посредством зацепления первого устройства CL1 муфты. Поскольку рабочее состояние первого режима, показанного на фиг. 44, является практически идентичным или аналогичным рабочему состоянию первого режима, показанного на фиг. 33, подробное описание здесь опускается. Кроме того, для модуля 82H привода, показанного на фиг. 44, может задаваться режим, который является идентичным или аналогичным каждому из второго-пятого режимов, показанных на фиг. 34-37, помимо первого режима.
[0266] Каждый из вариантов осуществления, описанных выше, представляет собой пояснение примером настоящего изобретения, и конструкции и функции, конкретные для любого из вариантов осуществления, могут применяться к другому варианту осуществления. Кроме того, настоящее изобретение не ограничено каждым из вышеуказанных вариантов осуществления и может изменяться надлежащим образом в пределах диапазона без отступления от цели настоящего изобретения.
[0267] Например, вместо планетарного зубчатого механизма с сателлитами одного типа, планетарный зубчатый механизм с сателлитами двух типов может использоваться для первого планетарного зубчатого механизма 14. В этом случае, солнечная шестерня планетарного зубчатого механизма с сателлитами двух типов может предоставляться вместо первой солнечной шестерни S1 планетарного зубчатого механизма с сателлитами одного типа, коронная шестерня планетарного зубчатого механизма с сателлитами двух типов - вместо первого водила C1 планетарного зубчатого механизма с сателлитами одного типа, и водило планетарного зубчатого механизма с сателлитами двух типов - вместо первой коронной шестерни R1 планетарного зубчатого механизма с сателлитами одного типа, соответственно. Планетарный зубчатый механизм с сателлитами двух типов может использоваться также для второго планетарного зубчатого механизма 15 вместо планетарного зубчатого механизма с сателлитами одного типа, идентично или аналогично вышеуказанному. Таким образом, первый планетарный зубчатый механизм 14 и второй планетарный зубчатый механизм 15 могут представлять собой комбинацию планетарного зубчатого механизма с сателлитами одного типа и планетарного зубчатого механизма с сателлитами двух типов или комбинацию наоборот, или комбинацию планетарных зубчатых механизмов с сателлитами двух типов.
[0268] Кроме того, в вариантах осуществления настоящего изобретения, первое устройство CL1 муфты должно представлять собой только модуль для интегрирования второго планетарного зубчатого механизма 15 посредством зацепления в общих словах, и в силу этого оно может представлять собой устройство муфты, сконструированное таким образом, чтобы соединять любые два вращательных элемента во второй солнечной шестерне S2, втором водиле C2 и второй коронной шестерне R2 или эти три вращательных элемента. Кроме того, в настоящем раскрытии сущности, оно может сконструировано таким образом, что движущая сила, сформированная посредством второго электромотора 13, передается на колесо, отличающееся от колеса, на которое передается движущая сила первого электромотора 12.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2694387C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2698607C1 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668448C2 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |
| Устройство адаптивного управления для пусковой муфты транспортного средства | 2014 |
|
RU2644492C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2659151C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИИ | 2013 |
|
RU2643901C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2627238C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ МОЩНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2540197C1 |
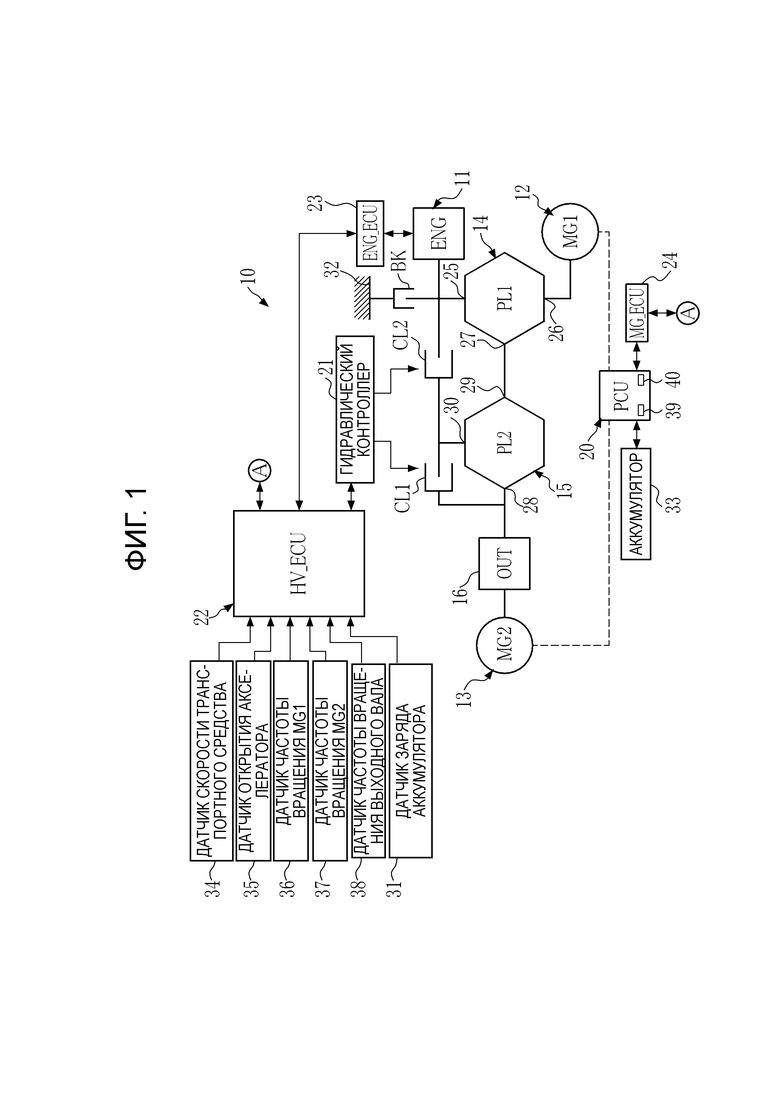
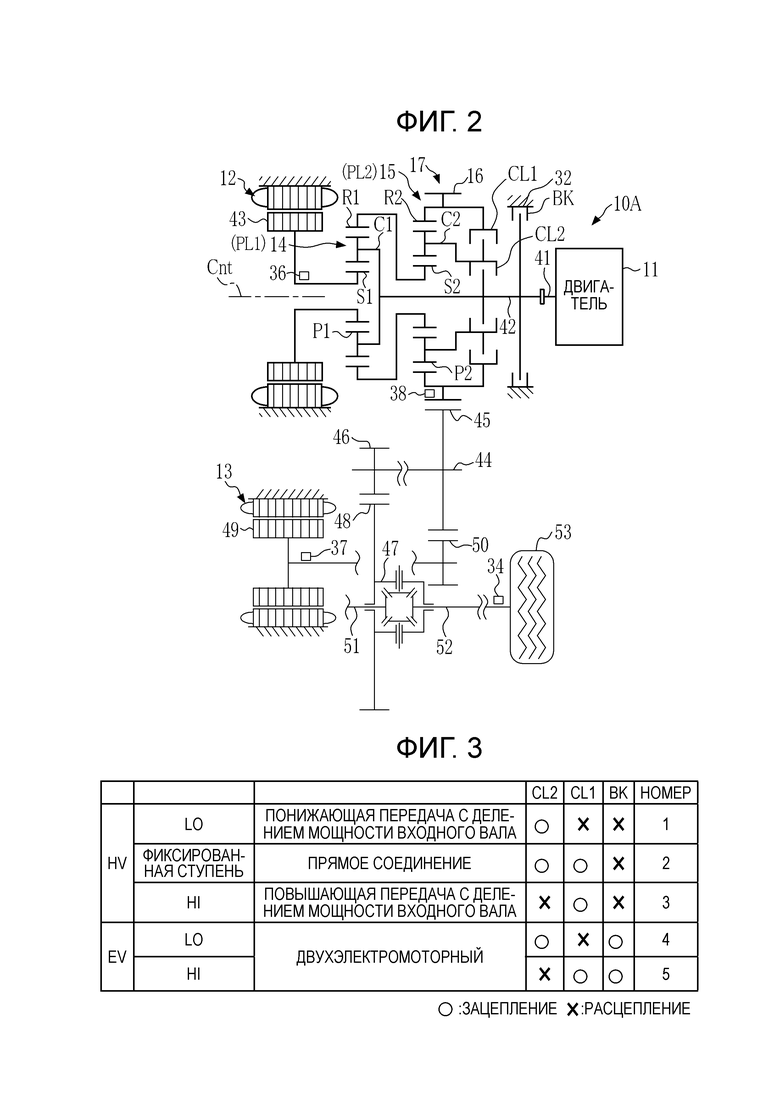
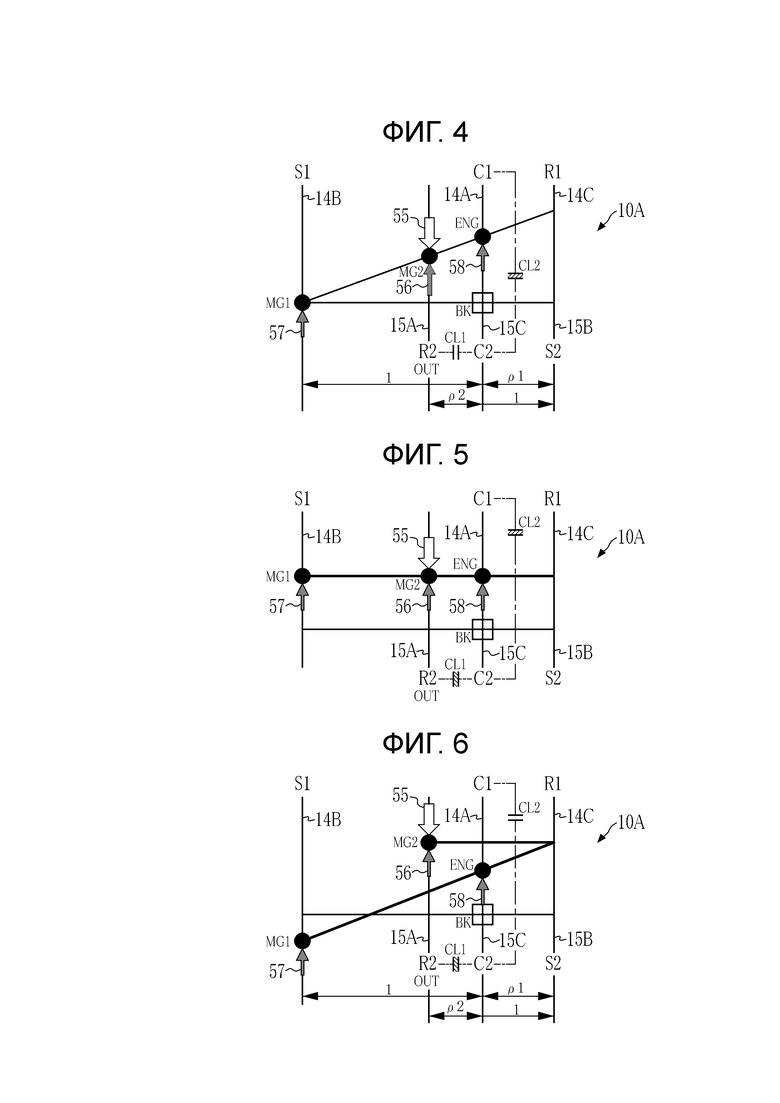
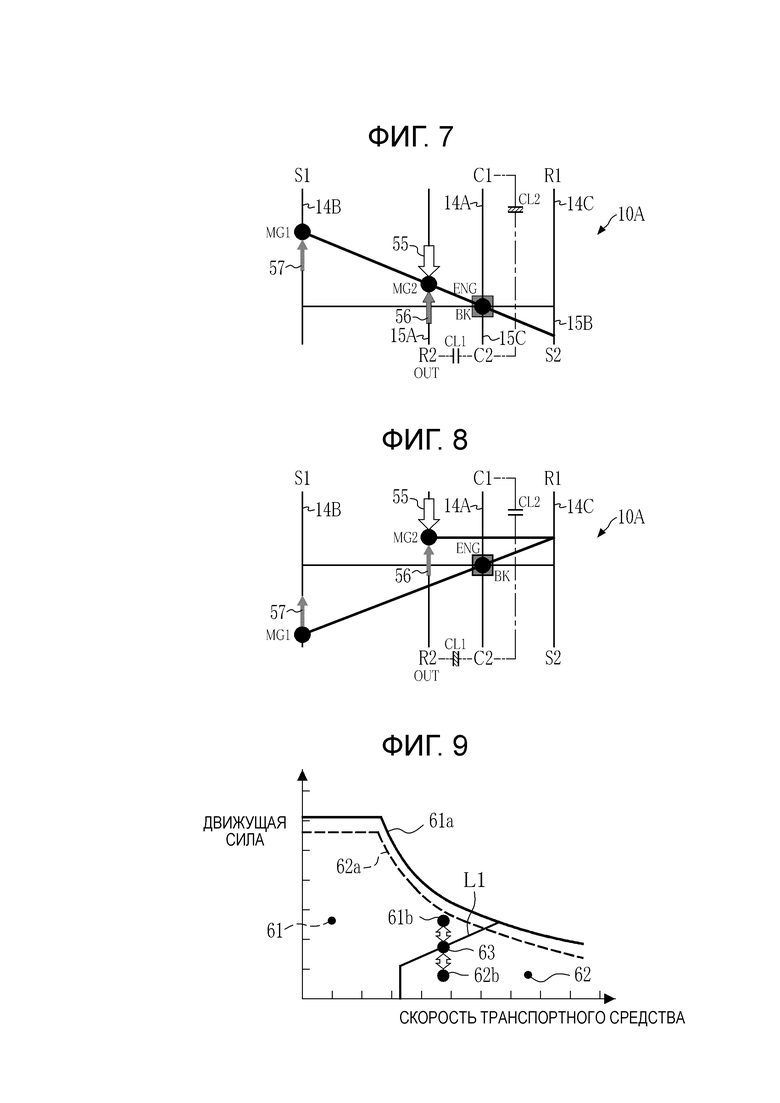
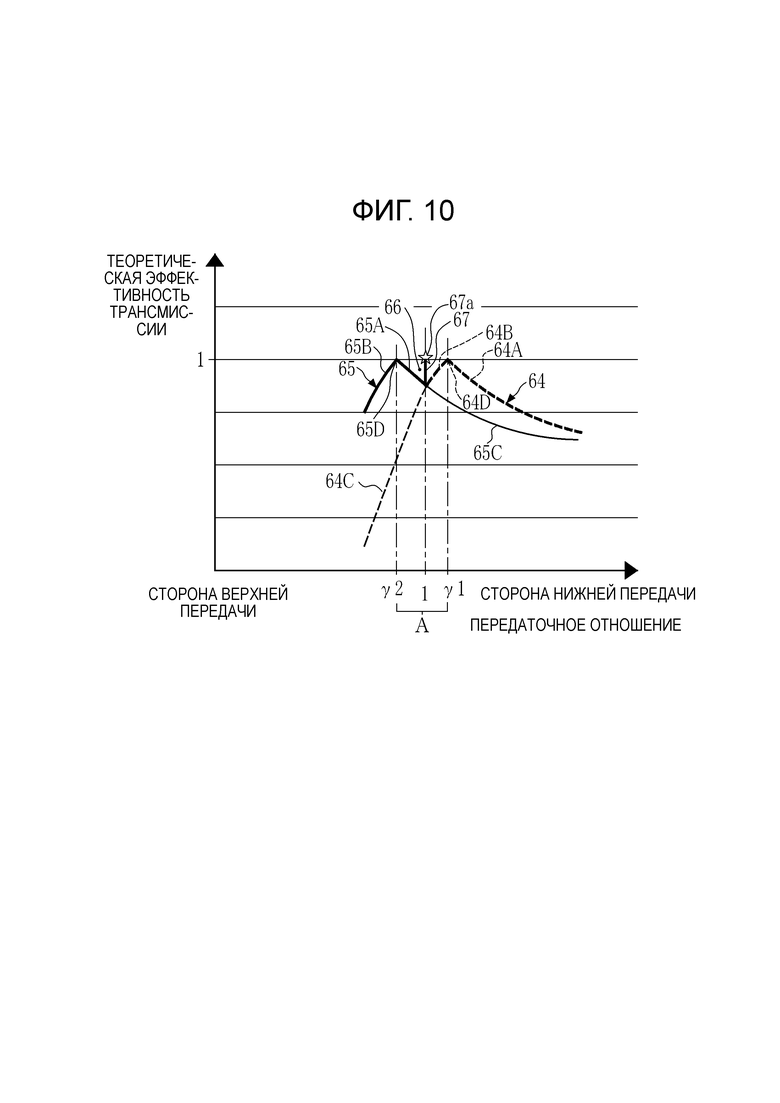
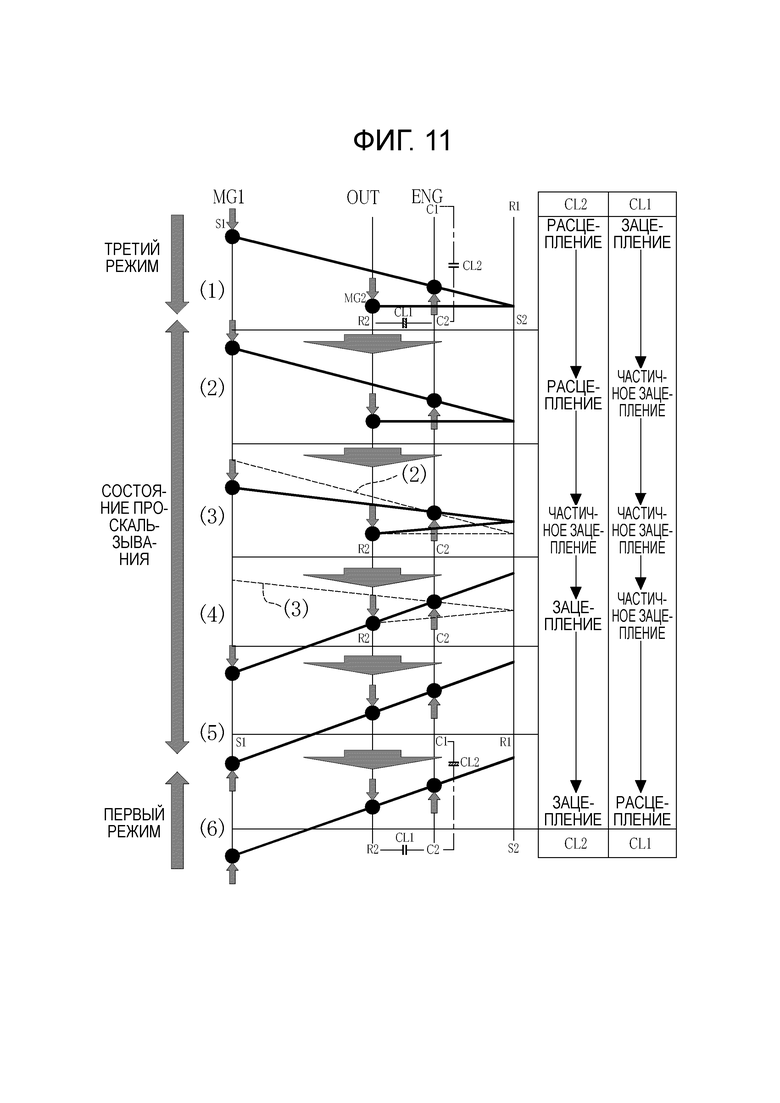
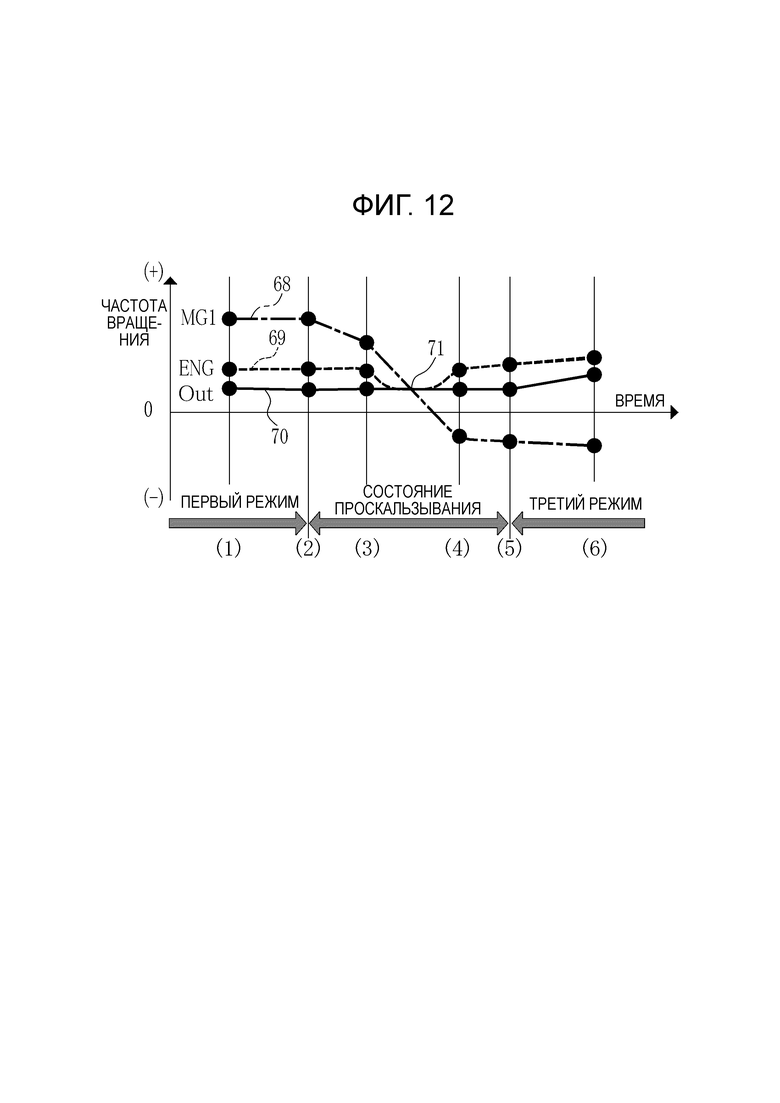
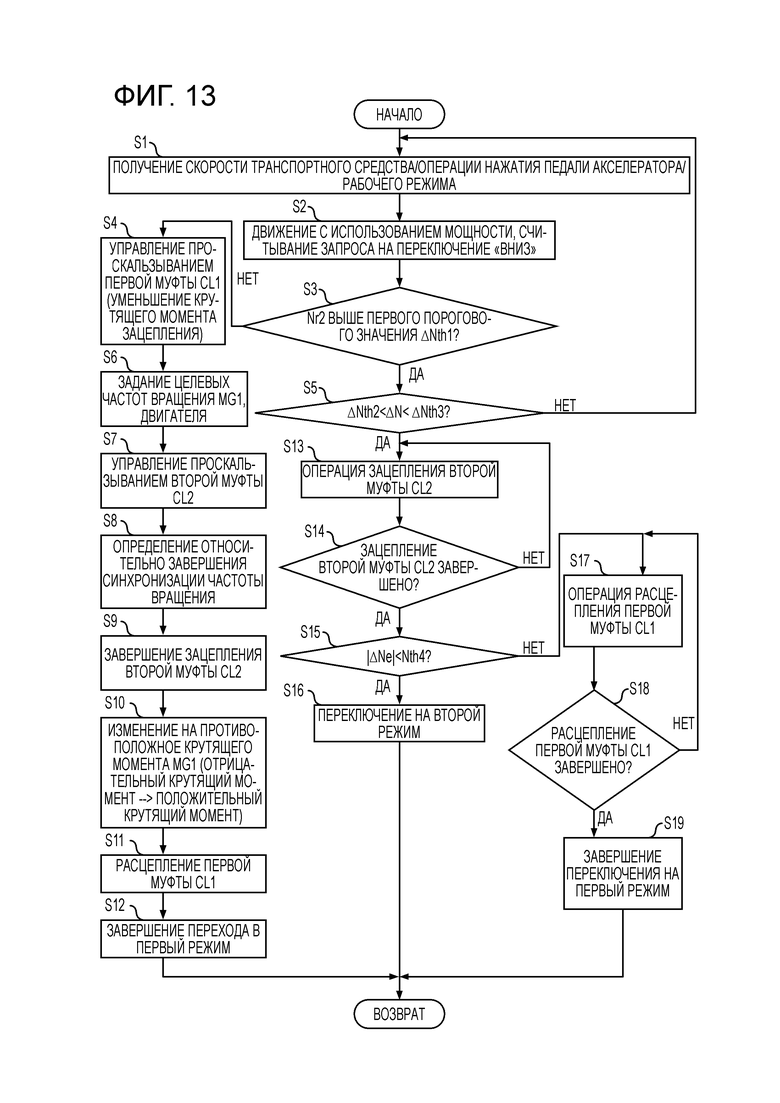
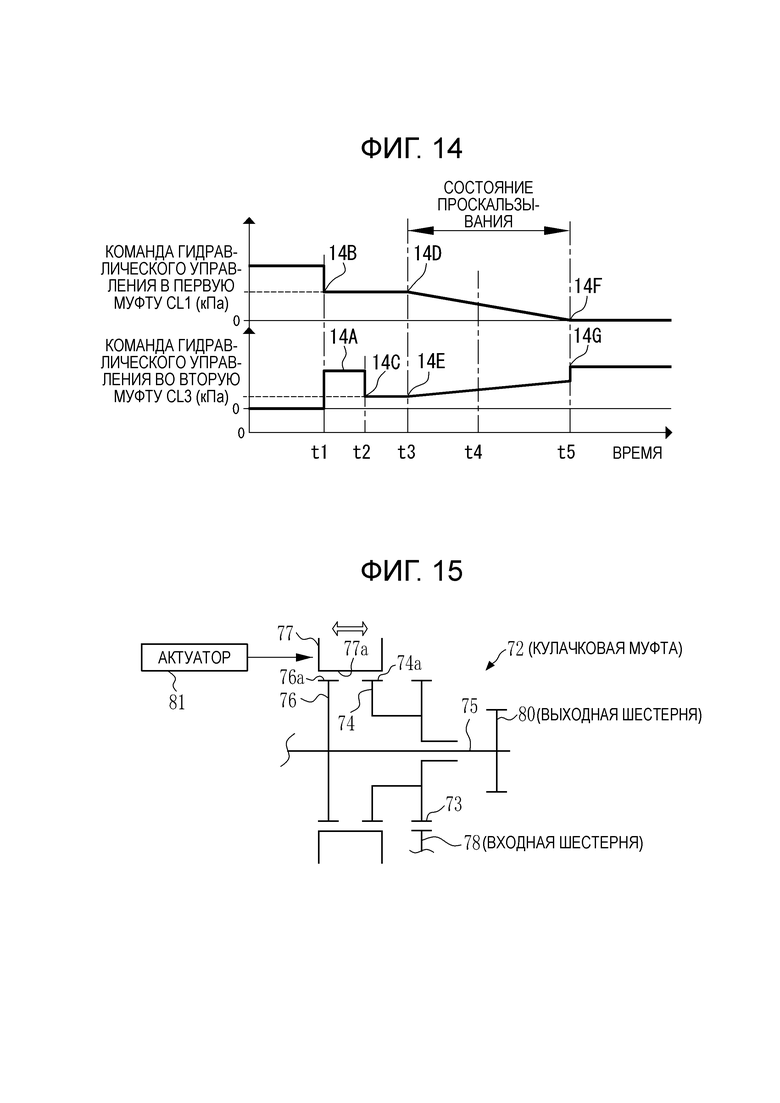
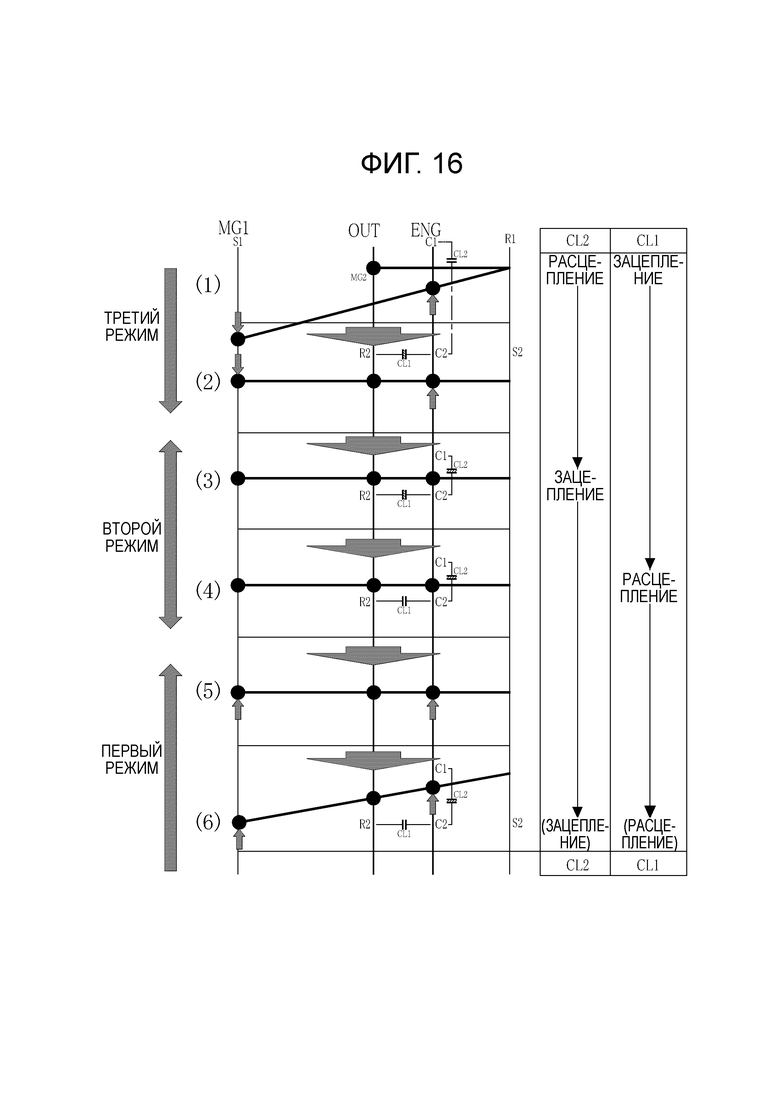
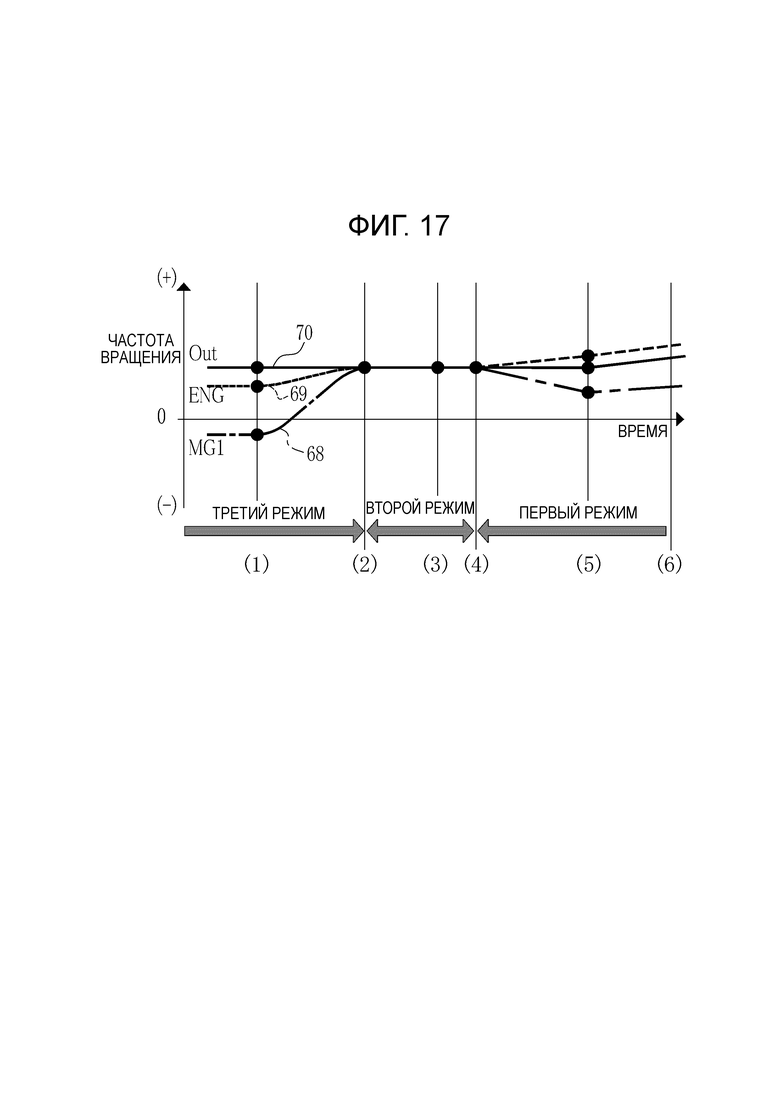
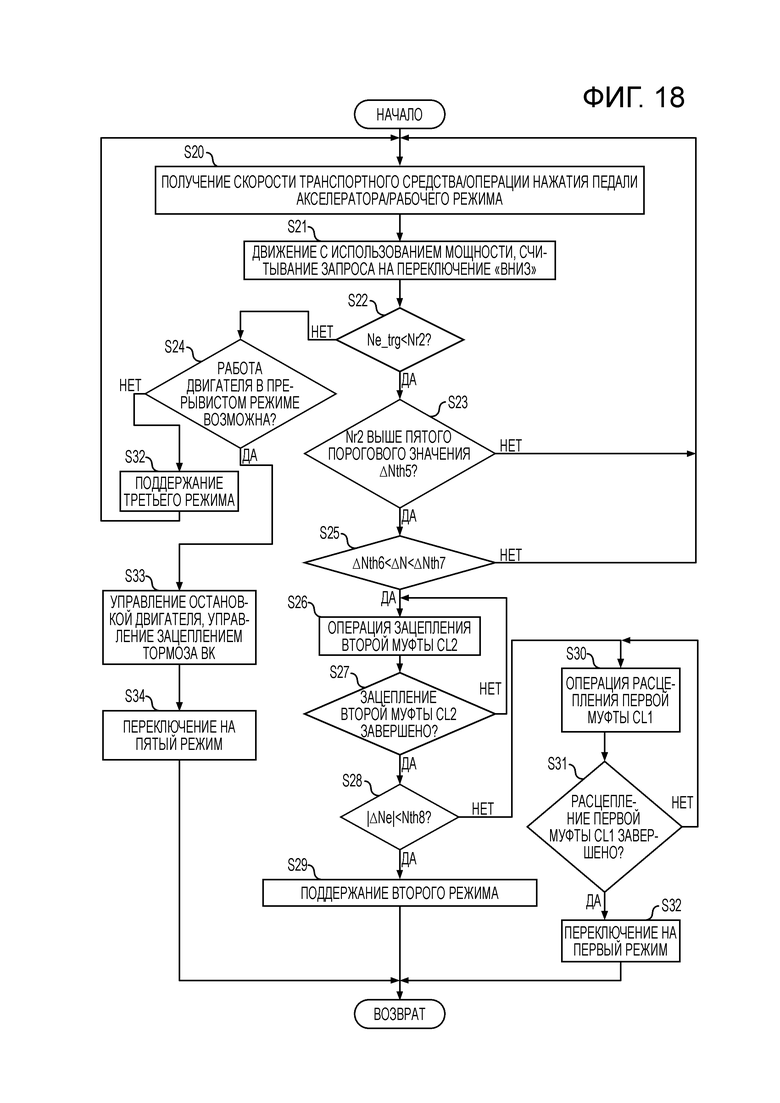
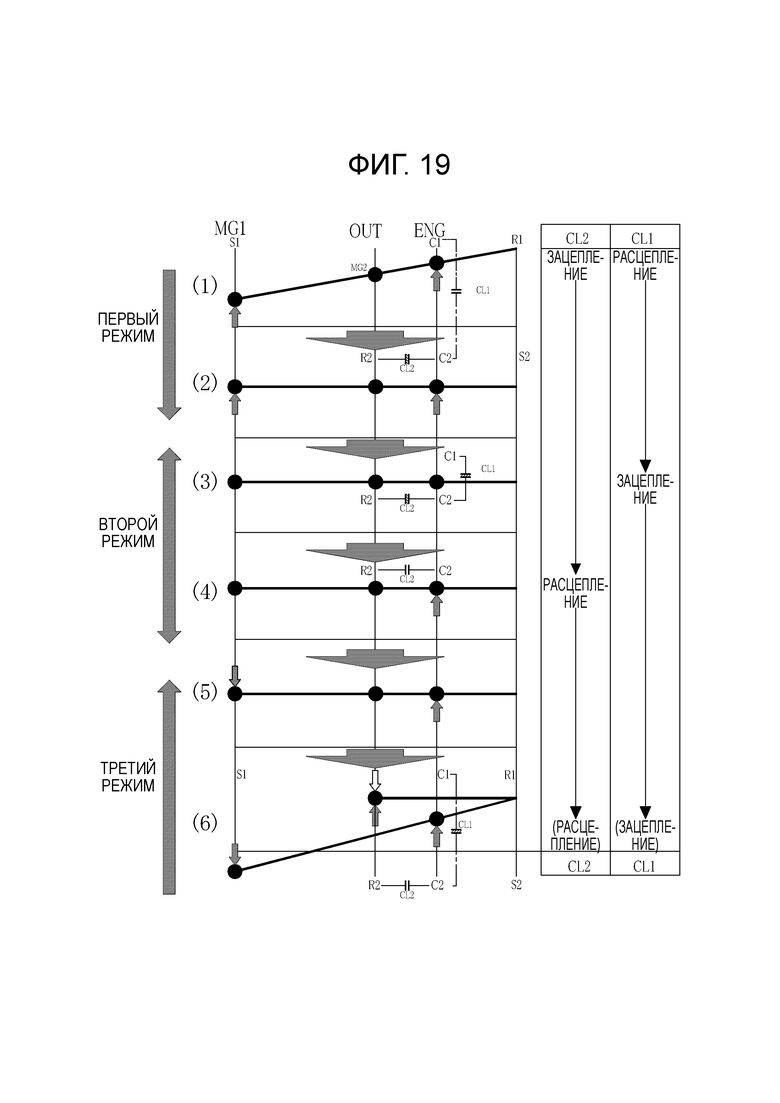
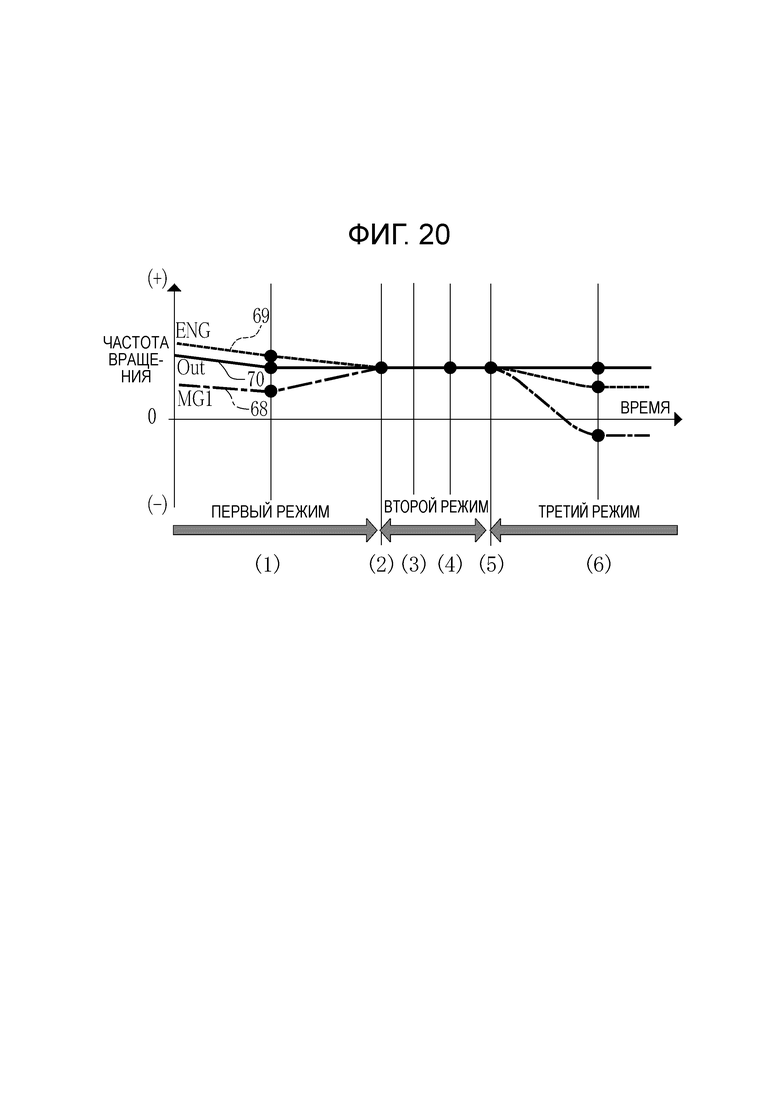
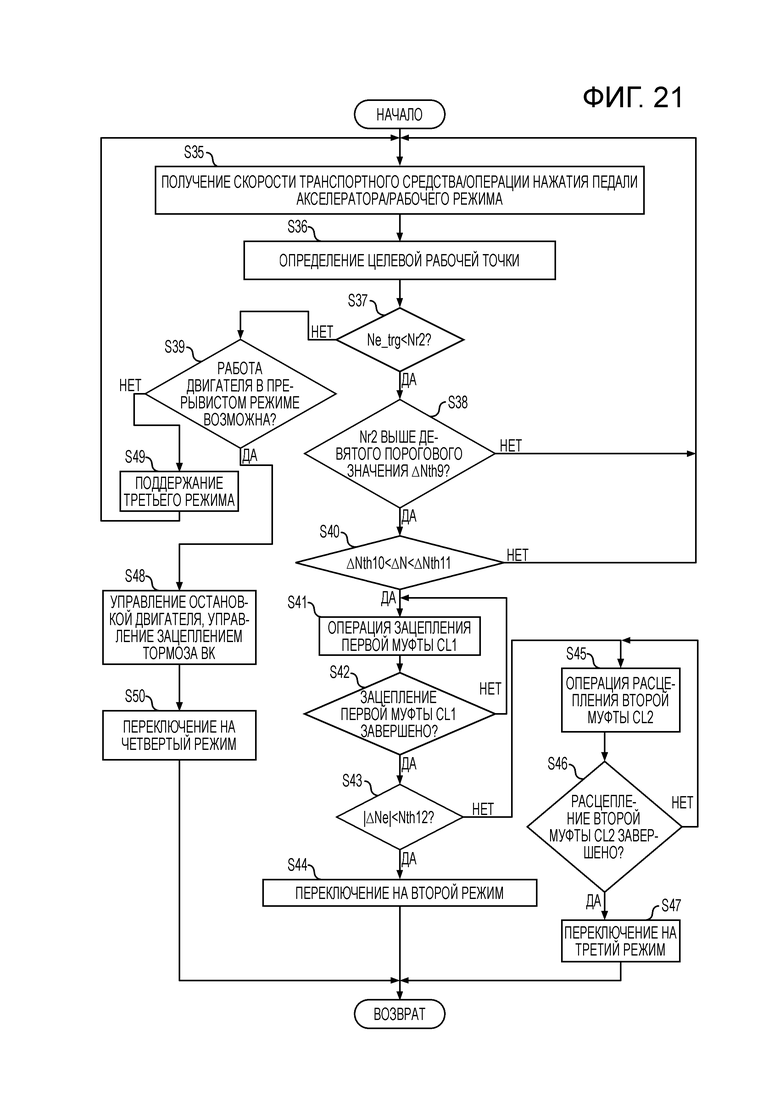
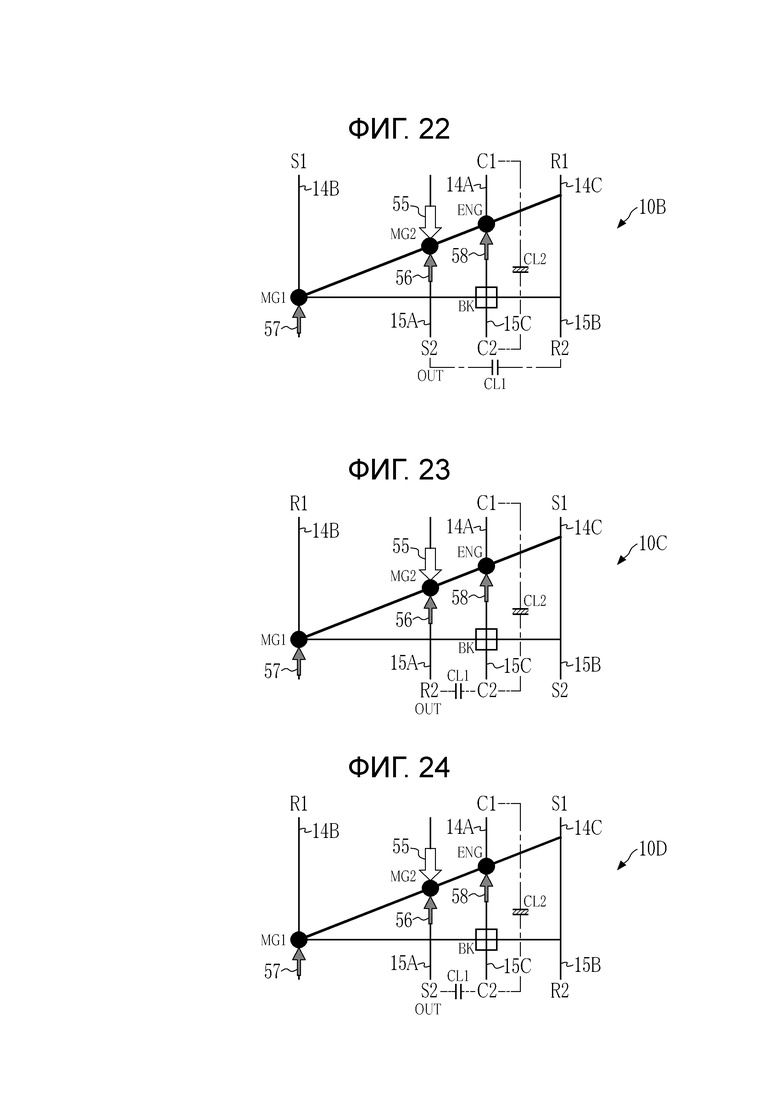
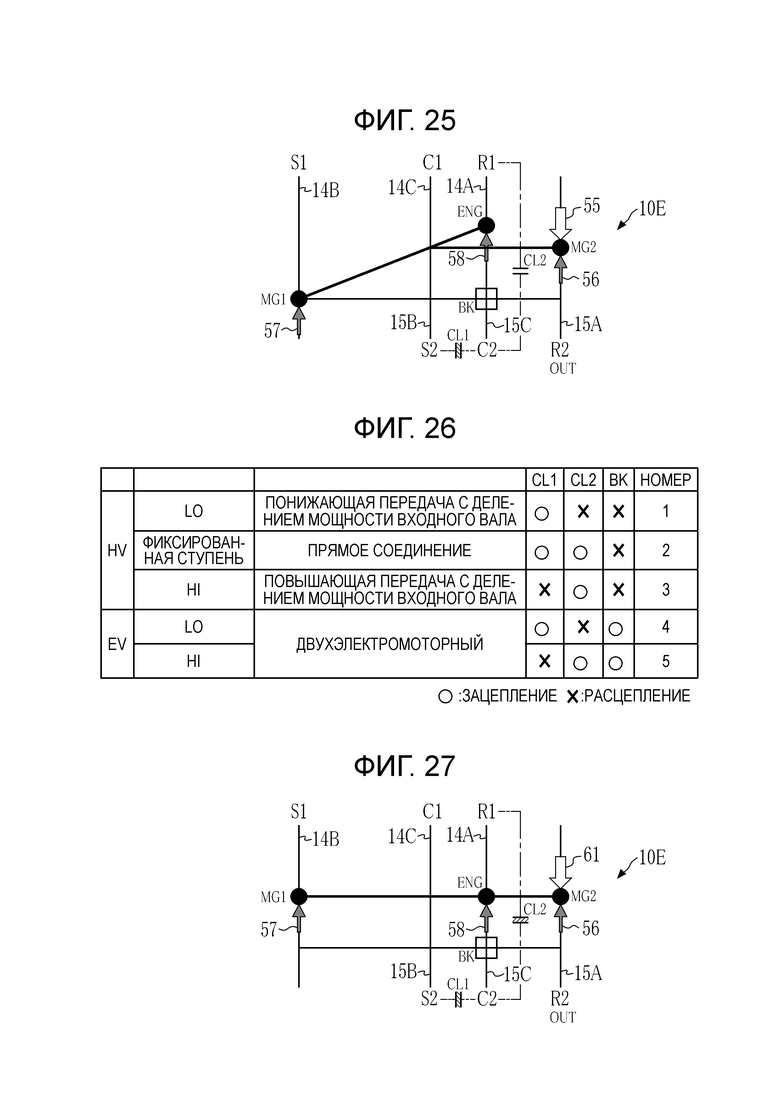
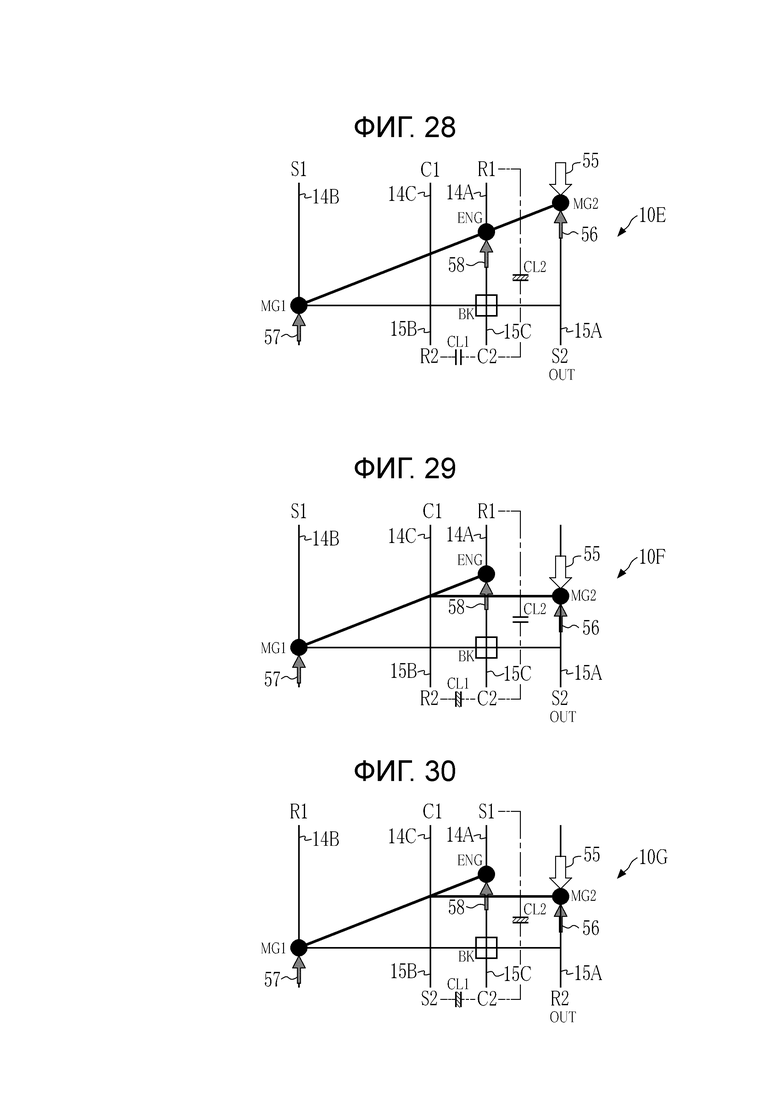
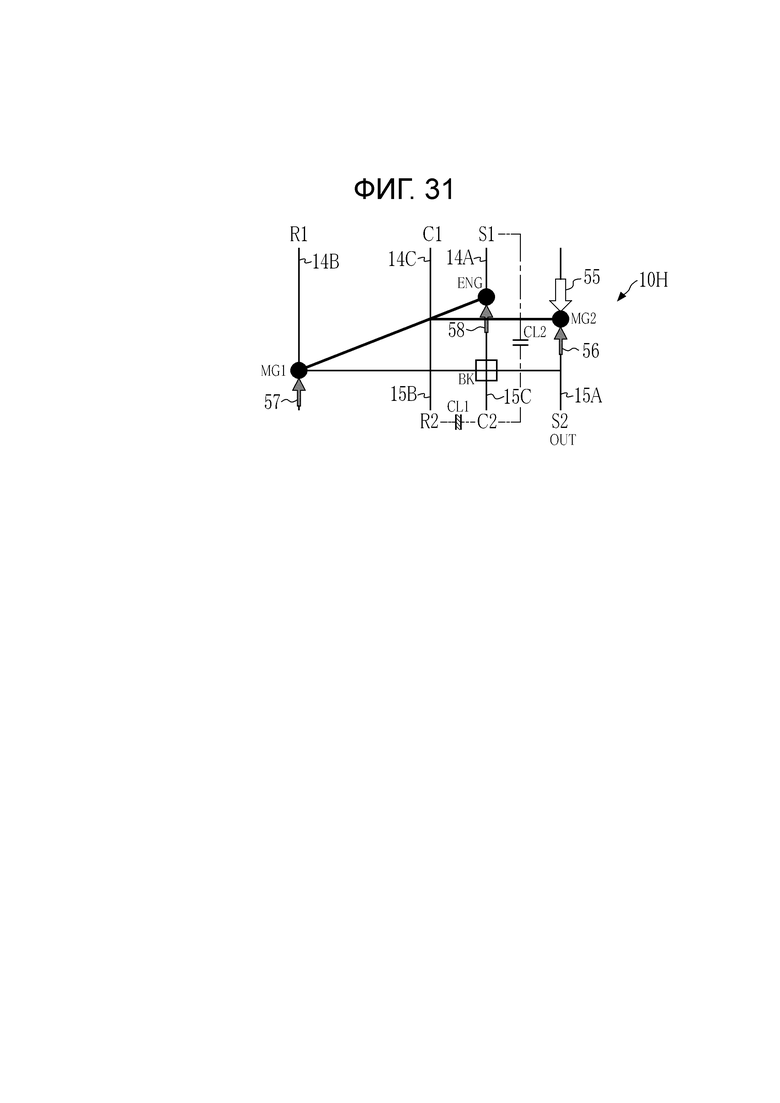
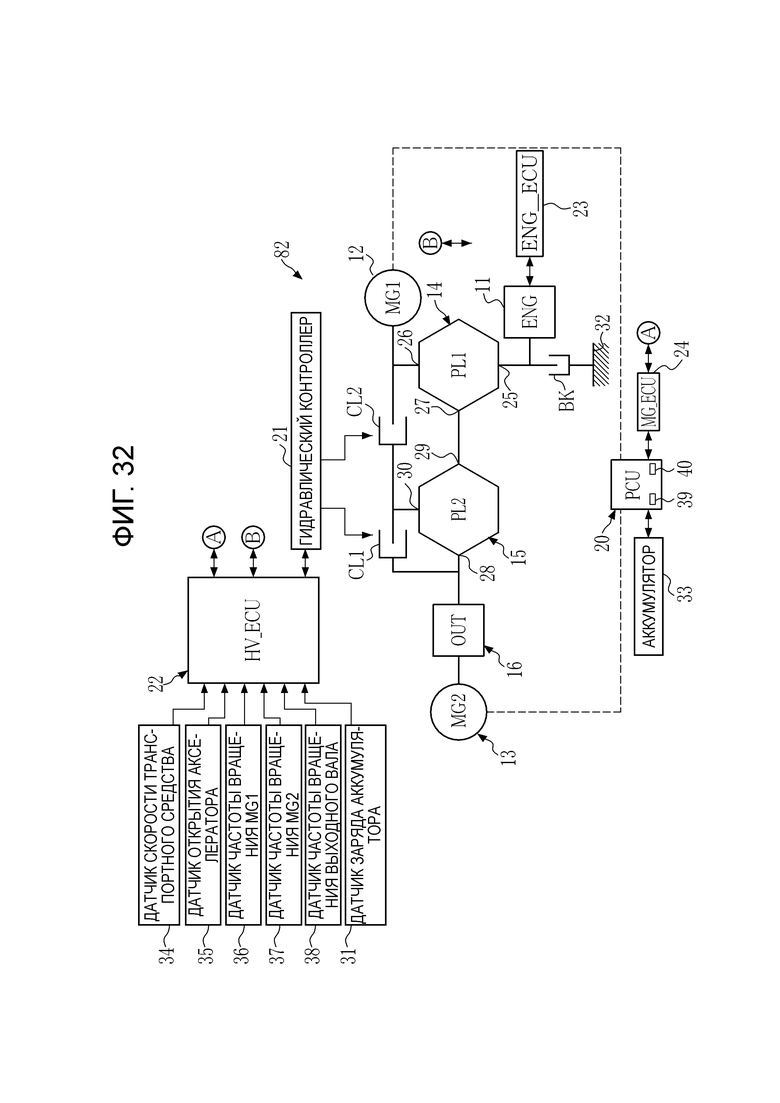
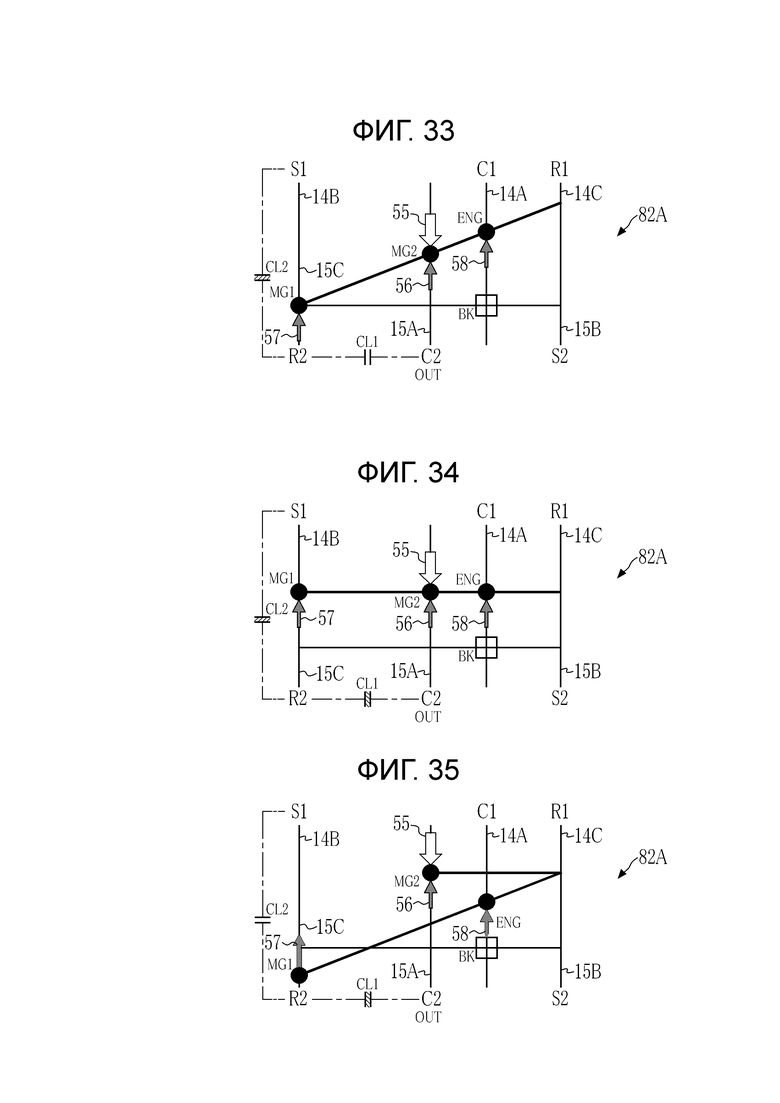
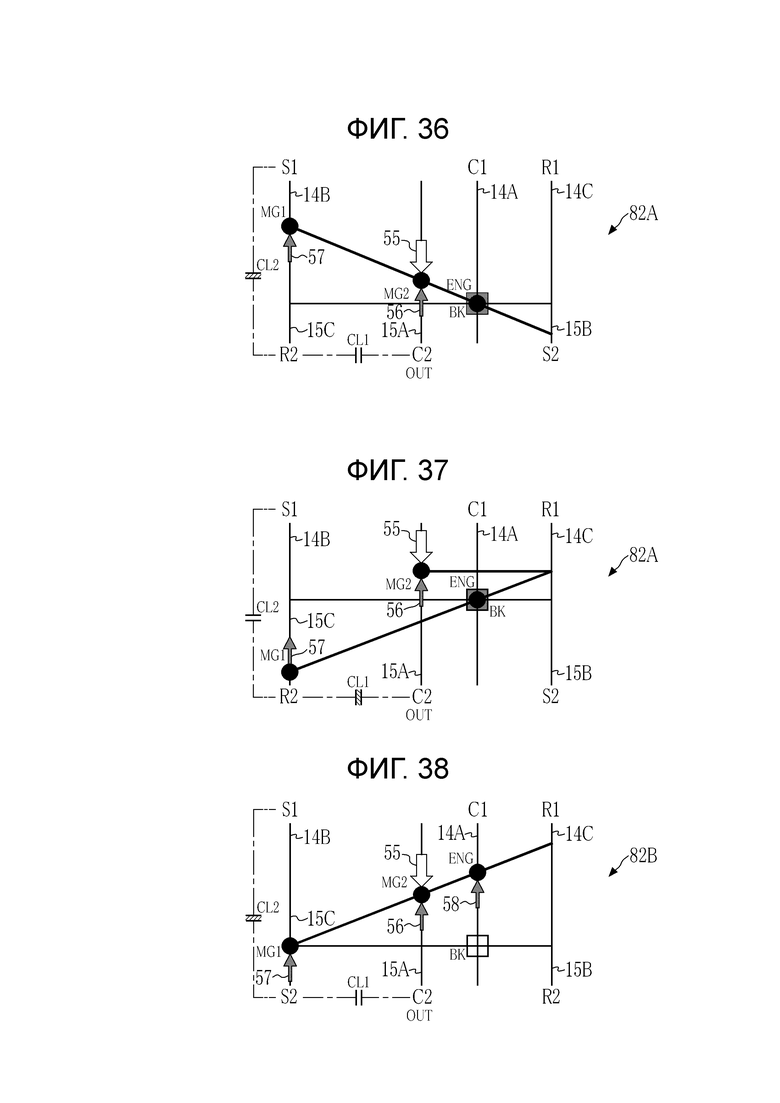
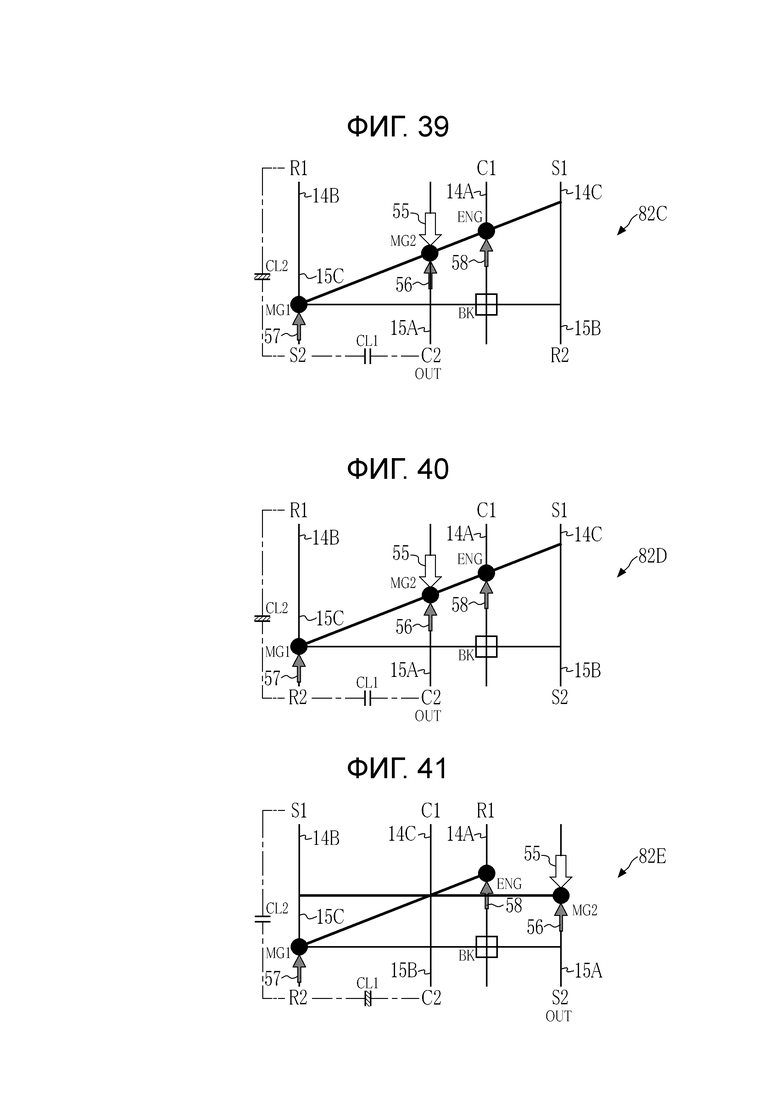
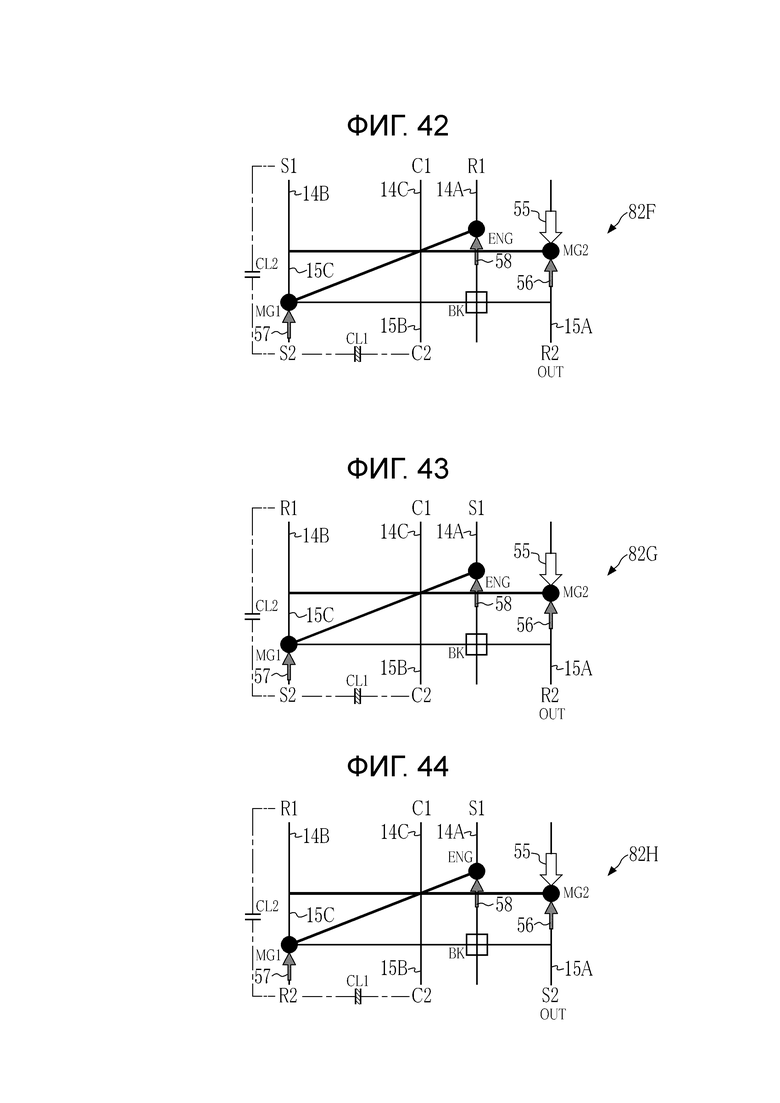
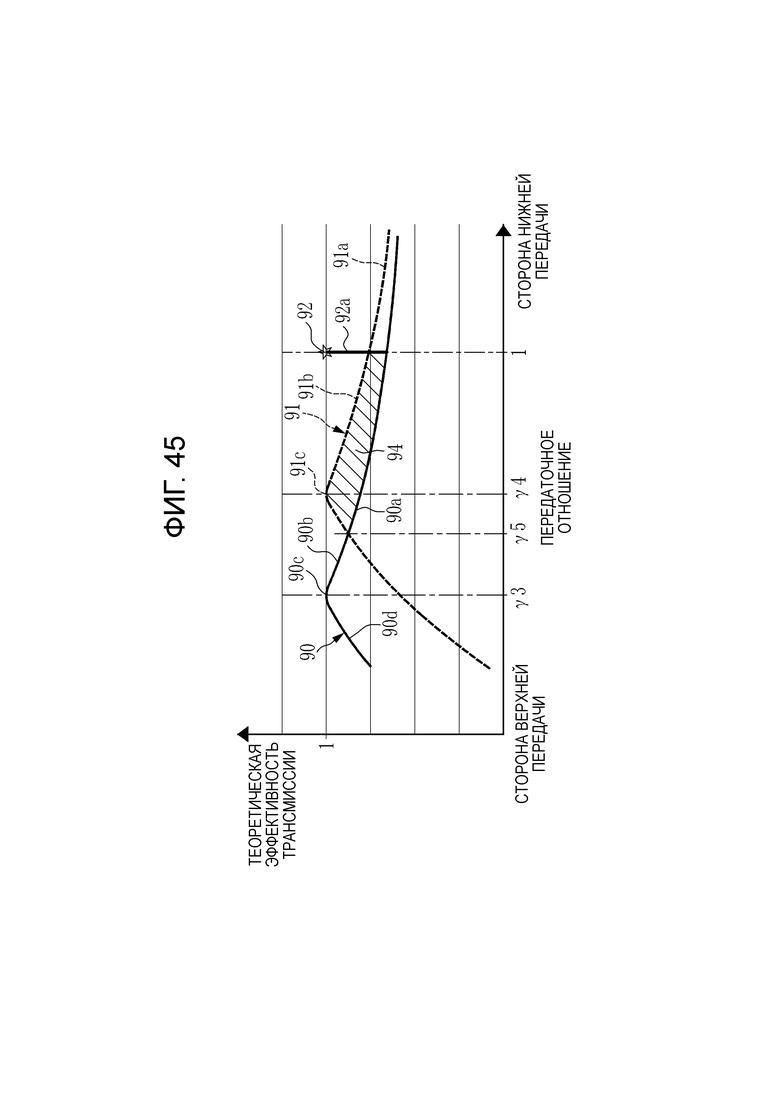
Изобретение относится к гибридным транспортным средствам. Модуль привода для гибридного транспортного средства содержит двигатель, первый и второй электромотор. Первый блок дифференциала включает первый, второй и третий вращательные элементы. Второй блок дифференциала включает четвертый, пятый и шестой вращательные элементы. Первое зацепляющее устройство избирательно соединяет любые два из четвертого, пятого и шестого вращательных элементов. Второе зацепляющее устройство избирательно соединяет первый или второй вращательный элемент с шестым вращательным элементом. Первый режим, в котором отношение частот вращения между двигателем и выходным компонентом становится меньшим 1, устанавливается посредством зацепления любого из первого и второго зацепляющих устройств при расцеплении другого зацепляющего устройства. Второй режим, в котором отношение частот вращения становится большим 1, устанавливается посредством зацепления другого зацепляющего устройства при расцеплении одного из зацепляющих устройств. Повышается эффективность использования топлива. 22 з.п. ф-лы, 45 ил.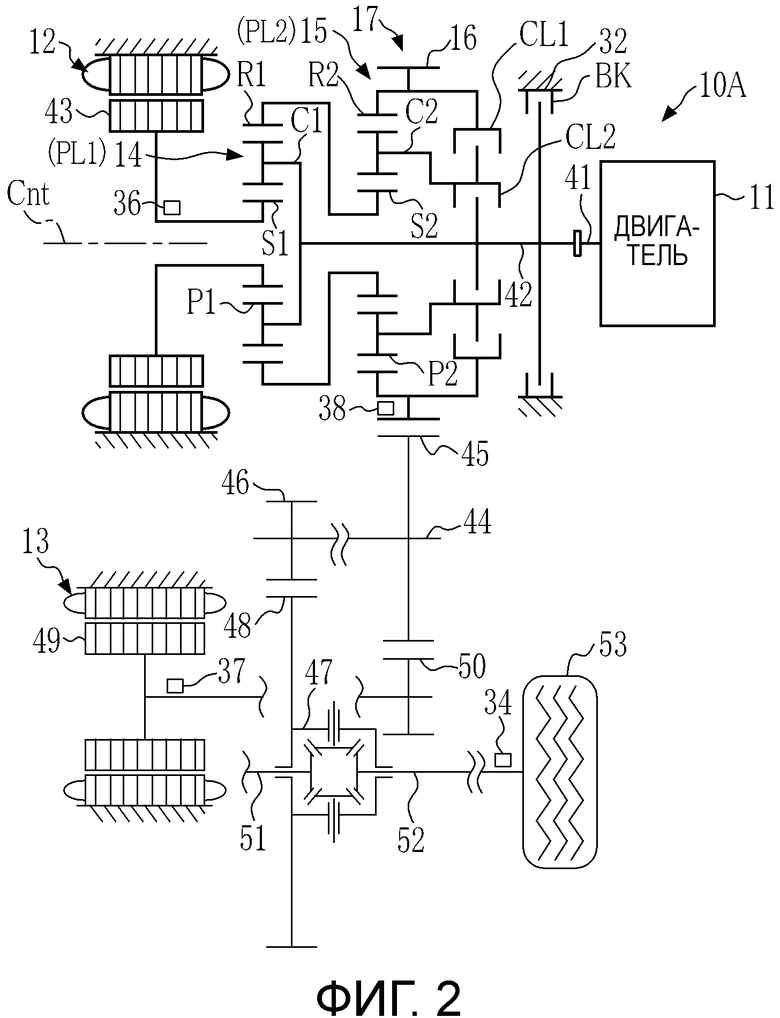
1. Модуль привода для гибридного транспортного средства, в котором первичный движитель включает в себя двигатель, первый электромотор и второй электромотор и в котором движущая сила, сформированная посредством первичного движителя, передается в выходной компонент, соединенный с ведущим колесом, отличающийся тем, что он содержит:
первый блок дифференциала, включающий в себя первый вращательный элемент, с которым соединяется двигатель, второй вращательный элемент, с которым соединяется первый электромотор, и третий вращательный элемент;
второй блок дифференциала, включающий в себя четвертый вращательный элемент, с которым соединяется выходной компонент, пятый вращательный элемент, соединенный с третьим вращательным элементом, и шестой вращательный элемент;
первое зацепляющее устройство, которое зацепляется, чтобы избирательно соединять любые два из четвертого вращательного элемента, пятого вращательного элемента и шестого вращательного элемента; и
второе зацепляющее устройство зацепляется, чтобы избирательно соединять первый вращательный элемент или второй вращательный элемент с шестым вращательным элементом,
при этом первый режим, в котором отношение частот вращения между двигателем и выходным компонентом становится первым отношением, меньшим 1, устанавливается посредством зацепления любого из первого зацепляющего устройства и второго зацепляющего устройства при расцеплении другого зацепляющего устройства, и
второй режим, в котором отношение частот вращения становится вторым отношением, большим 1, устанавливается посредством зацепления упомянутого другого зацепляющего устройства при расцеплении упомянутого одного из зацепляющих устройств.
2. Модуль привода для гибридного транспортного средства по п. 1, дополнительно содержащий:
детектор, который определяет по меньшей мере одно из скорости транспортного средства и запрашиваемой движущей силы, и
контроллер, который управляет двигателем, первым электромотором, вторым электромотором, первым зацепляющим устройством и вторым зацепляющим устройством,
при этом контроллер выполнен с возможностью:
установки первого режима по меньшей мере в одном из случаев, в которых скорость транспортного средства выше заданной скорости и в которых запрашиваемая движущая сила не выше заданной силы, и
установки второго режима по меньшей мере в одном из случаев, в которых скорость транспортного средства ниже заданной скорости и в которых запрашиваемая движущая сила превышает заданную силу.
3. Модуль привода для гибридного транспортного средства по п. 1 или 2,
в котором первый режим включает в себя состояние, в котором мощность двигателя передается в выходной компонент посредством уменьшения частоты первого электромотора до нуля, когда отношение частот вращения представляет собой первое отношение, меньшее 1,
второй режим включает в себя состояние, в котором мощность двигателя передается в выходной компонент посредством уменьшения частоты первого электромотора до нуля, когда отношение частот вращения представляет собой второе передаточное отношение, большее 1,
может задаваться третье состояние, в котором отношение частот вращения, когда первое зацепляющее устройство и второе зацепляющее устройство находятся в зацепленном состоянии, равно 1;
причем модуль привода дополнительно содержит контроллер, который управляет двигателем, первым электромотором, вторым электромотором, первым зацепляющим устройством и вторым зацепляющим устройством, и
контроллер выполнен с возможностью выбора первого режима, когда отношение частот вращения меньше 1, выбора второго режима, когда отношение частот вращения превышает 1, и выбора третьего состояния, когда отношение частот вращения равно 1.
4. Модуль привода для гибридного транспортного средства по п. 2, в котором контроллер дополнительно выполнен с возможностью:
установки первого режима посредством расцепления первого зацепляющего устройства при зацеплении второго зацепляющего устройства и
установки второго режима посредством зацепления первого зацепляющего устройства при расцеплении второго зацепляющего устройства.
5. Модуль привода для гибридного транспортного средства по п. 2, в котором контроллер дополнительно выполнен с возможностью:
установки первого режима посредством зацепления первого зацепляющего устройства при расцеплении второго зацепляющего устройства и
установки второго режима посредством расцепления первого зацепляющего устройства при зацеплении второго зацепляющего устройства.
6. Модуль привода для гибридного транспортного средства по п. 1 или 2, в котором первое зацепляющее устройство и второе зацепляющее устройство включают в себя кулачковую муфту, в которой крутящий момент передается посредством зацепления первых зубьев, предусмотренных на элементе на входной стороне, со вторыми зубьями, предусмотренными на элементе на выходной стороне.
7. Модуль привода для гибридного транспортного средства по п. 6, в котором контроллер дополнительно выполнен с возможностью зацепления кулачковой муфты, расцепленной перед переключением частоты вращения, и расцепления кулачковой муфты, зацепленной перед переключением частоты вращения, если разность частот вращения между двигателем и выходным компонентом не превышает заданное значение при переключении между первым режимом и вторым режимом.
8. Модуль привода для гибридного транспортного средства по любому из пп. 1, 2, 4 и 5, в котором первое зацепляющее устройство и второе зацепляющее устройство включают в себя фрикционную муфту, имеющую вращающийся элемент на входной стороне, к которому прикладывается движущий крутящий момент, и вращающийся элемент на выходной стороне для вывода движущего крутящего момента.
9. Модуль привода для гибридного транспортного средства по п. 8, в котором контроллер дополнительно выполнен с возможностью параллельного выполнения первого управления для того, чтобы уменьшать перегрузочную способность по передаче крутящего момента фрикционной муфты, зацепленной перед переключением частоты вращения, и второго управления для того, чтобы увеличивать перегрузочную способность по передаче крутящего момента фрикционной муфты, расцепленной перед переключением частоты вращения, при переключении между первым режимом и вторым режимом.
10. Модуль привода для гибридного транспортного средства по любому из пп. 1, 2, 4 и 5, дополнительно содержащий
тормозное устройство, которое избирательно соединяет первый вращательный элемент с заданным закрепленным элементом.
11. Модуль привода для гибридного транспортного средства по любому из пп. 1, 2, 4 и 5, в котором второе зацепляющее устройство выполнено с возможностью избирательного соединения первого вращательного элемента и шестого вращательного элемента.
12. Модуль привода для гибридного транспортного средства по любому из пп. 1, 2, 4 и 5, в котором первое зацепляющее устройство выполнено с возможностью избирательного соединения четвертого вращательного элемента и шестого вращательного элемента.
13. Модуль привода для гибридного транспортного средства по п. 6,
в котором первый блок дифференциала включает в себя планетарный зубчатый механизм и
первый вращательный элемент включает в себя первое водило, второй вращательный элемент включает в себя первую солнечную шестерню и третий вращательный элемент включает в себя первую коронную шестерню.
14. Модуль привода для гибридного транспортного средства по п. 6,
в котором первый блок дифференциала включает в себя планетарный зубчатый механизм и
первый вращательный элемент включает в себя первое водило, второй вращательный элемент включает в себя первую коронную шестерню и третий вращательный элемент включает в себя первую солнечную шестерню.
15. Модуль привода для гибридного транспортного средства по п. 6,
в котором первый блок дифференциала включает в себя планетарный зубчатый механизм и
первый вращательный элемент включает в себя первую коронную шестерню, второй вращательный элемент включает в себя первую солнечную шестерню и третий вращательный элемент включает в себя первое водило.
16. Модуль привода для гибридного транспортного средства по п. 6,
в котором первый блок дифференциала включает в себя планетарный зубчатый механизм и
первый вращательный элемент включает в себя первую солнечную шестерню, второй вращательный элемент включает в себя первую коронную шестерню и третий вращательный элемент включает в себя первое водило.
17. Модуль привода для гибридного транспортного средства по п. 13,
в котором второй блок дифференциала включает в себя планетарный зубчатый механизм и
четвертый вращательный элемент включает в себя вторую коронную шестерню, пятый вращательный элемент включает в себя вторую солнечную шестерню и шестой вращательный элемент включает в себя второе водило.
18. Модуль привода для гибридного транспортного средства по п. 13,
в котором второй блок дифференциала включает в себя планетарный зубчатый механизм и
четвертый вращательный элемент включает в себя вторую солнечную шестерню, пятый вращательный элемент включает в себя вторую коронную шестерню и шестой вращательный элемент включает в себя второе водило.
19. Модуль привода для гибридного транспортного средства по п. 13,
в котором второй блок дифференциала включает в себя планетарный зубчатый механизм и
четвертый вращательный элемент включает в себя второе водило, пятый вращательный элемент включает в себя вторую солнечную шестерню и шестой вращательный элемент включает в себя вторую коронную шестерню.
20. Модуль привода для гибридного транспортного средства по п. 13,
в котором второй блок дифференциала включает в себя планетарный зубчатый механизм и
четвертый вращательный элемент включает в себя второе водило, пятый вращательный элемент включает в себя вторую коронную шестерню и шестой вращательный элемент включает в себя вторую солнечную шестерню.
21. Модуль привода для гибридного транспортного средства по п. 15,
в котором второй блок дифференциала включает в себя планетарный зубчатый механизм и
четвертый вращательный элемент включает в себя вторую солнечную шестерню, пятый вращательный элемент включает в себя второе водило и шестой вращательный элемент включает в себя вторую коронную шестерню.
22. Модуль привода для гибридного транспортного средства по п. 15,
в котором второй блок дифференциала включает в себя планетарный зубчатый механизм и
четвертый вращательный элемент включает в себя вторую коронную шестерню, пятый вращательный элемент включает в себя второе водило и шестой вращательный элемент включает в себя вторую солнечную шестерню.
23. Модуль привода для гибридного транспортного средства по п. 1,
в котором первый блок дифференциала и второй блок дифференциала имеют такую конструкцию, что второй вращательный элемент, четвертый вращательный элемент, первый вращательный элемент и третий вращательный элемент или пятый вращательный элемент совмещаются в порядке второго вращательного элемента, четвертого вращательного элемента, первого вращательного элемента, третьего вращательного элемента или пятого вращательного элемента на номографической схеме.
| US 2010081533 A1, 01.04.2010 | |||
| JP 2006282069 A, 19.10.2006 | |||
| EP 3106338 A1, 21.12.2016 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2010 |
|
RU2518144C2 |

