ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству приведения в движение для гибридного транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Традиционно, известно гибридное транспортное средство, которое включает в себя зубчатую передачу. Например, патентный документ 1 раскрывает технологию касательно устройства приведения в движение для гибридного транспортного средства, которое включает в себя зубчатую передачу, сконфигурированную с возможностью передавать вращение двигателя внутреннего сгорания на механизм деления мощности через переключение скорости, первый передаточный вал, сконфигурированный с возможностью передавать мощность из двигателя внутреннего сгорания на зубчатую передачу, и второй передаточный вал, сконфигурированный с возможностью передавать выходную мощность из зубчатой передачи на механизм деления мощности. Зубчатая передача, упомянутая в патентном документе 1, включает в себя дифференциальный механизм, в котором комбинируются две планетарные зубчатые передачи, первый тормоз, который может останавливать вращение коронной шестерни R1 дифференциального механизма, второй тормоз, который может останавливать вращение коронной шестерни R2, и муфту, сконфигурированную с возможностью прерывать передачу мощности из первого передаточного вала на коронную шестерню R1.
ПАТЕНТНЫЕ ДОКУМЕНТЫ
Патентный документ 1: Публикация заявки на патент Японии № 2009-190694 (JP 2009-190694 A).
ЗАДАЧИ, КОТОРЫЕ ДОЛЖНЫ БЫТЬ РЕШЕНЫ ИЗОБРЕТЕНИЕМ
В гибридном транспортном средстве, включающем в себя механизм, допускающий передачу вращения двигателя через переключение скорости, предпочтительно, может быть упрощено устройство приведения в движение. Например, предпочтительно, чтобы конфигурация устройства приведения в движение была простой, и могло осуществляться движение с двумя вращающимися электрическими машинами, используемыми в качестве источников мощности.
Задачей настоящего изобретения является создание устройства приведения в движение для гибридного транспортного средства, допускающего выполнение переключения скорости для вращения двигателя и движение с помощью двух вращающихся электрических машин, используемых в качестве источников мощности с простой конструкцией.
СРЕДСТВО ДЛЯ РЕШЕНИЯ ЗАДАЧ
Устройство приведения в движение для гибридного транспортного средства настоящего изобретения включает в себя: механизм передачи мощности, который соединяется с двигателем и передает вращение двигателя; дифференциальный механизм, который соединяет механизм передачи мощности с ведущими колесами; и переключающее устройство, которое выполняет переключение скорости механизма передачи мощности, при этом дифференциальный механизм включает в себя первый вращательный элемент, который соединяется с элементом выходного вала механизма передачи мощности, второй вращательный элемент, который соединяется с первой вращающейся электрической машиной, и третий вращательный элемент, который соединяется со второй вращающейся электрической машиной и ведущими колесами, при этом вращение выходного элемента механизма передачи мощности ограничивается посредством переключающего устройства.
В вышеуказанном устройстве приведения в движение для гибридного транспортного средства, предпочтительно, механизм передачи мощности может ускорять и выводить вращение двигателя.
В вышеуказанном устройстве приведения в движение для гибридного транспортного средства, предпочтительно, механизм передачи мощности может замедлять и выводить вращение двигателя.
Предпочтительно, вышеуказанное устройство приведения в движение для гибридного транспортного средства имеет режим ограничения вращения выходного элемента механизма передачи мощности посредством переключающего устройства и движения с помощью первой вращающейся электрической машины и второй вращающейся электрической машины, используемых в качестве источников мощности.
В вышеуказанном устройстве приведения в движение для гибридного транспортного средства, предпочтительно, механизм передачи мощности представляет собой дифференциальный механизм, и переключающее устройство выполняет переключение скорости механизма передачи мощности посредством переключения между состоянием ограничения дифференциального результирующего движения механизма передачи мощности и состоянием разрешения дифференциального результирующего движения механизма передачи мощности.
В вышеуказанном устройстве приведения в движение для гибридного транспортного средства, предпочтительно, переключения скорости в механизме передачи мощности и дифференциальном механизме выполняются одновременно.
В вышеуказанном устройстве приведения в движение для гибридного транспортного средства, предпочтительно, когда переключения скорости в механизме передачи мощности и дифференциальном механизме выполняются одновременно, передаточное отношение трансмиссии одного из механизма передачи мощности и дифференциального механизма увеличивается, тогда как передаточное отношение трансмиссии другого снижается.
В вышеуказанном устройстве приведения в движение для гибридного транспортного средства, предпочтительно, механизм передачи мощности представляет собой дифференциальный механизм, и переключающее устройство включает в себя муфту, допускающую соединение вращательных элементов механизма передачи мощности, и тормоз, который ограничивает вращение вращательных элементов механизма передачи мощности.
ПРЕИМУЩЕСТВА ИЗОБРЕТЕНИЯ
Устройство приведения в движение для гибридного транспортного средства согласно настоящему изобретению включает в себя: механизм передачи мощности, который соединяется с двигателем и передает вращение двигателя; дифференциальный механизм, который соединяет механизм передачи мощности с ведущими колесами; и переключающее устройство, которое выполняет переключение скорости механизма передачи мощности. Дифференциальный механизм включает в себя первый вращательный элемент, который соединяется с элементом выходного вала механизма передачи мощности, второй вращательный элемент, который соединяется с первой вращающейся электрической машиной, и третий вращательный элемент, который соединяется со второй вращающейся электрической машиной и ведущими колесами. Устройство приведения в движение для гибридного транспортного средства ограничивает вращение выходного элемента механизма передачи мощности посредством переключающего устройства. За счет простой конструкции устройство приведения в движение для гибридного транспортного средства согласно настоящему изобретению обеспечивает такое преимущество, что переключение скорости может выполняться в ходе приведения в действие двигателя, и что транспортное средство может двигаться с помощью двух вращающихся электрических устройств, используемых в качестве источников мощности.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 является принципиальной схемой транспортного средства согласно варианту осуществления.
Фиг. 2 является схемой взаимосвязей данных входа-выхода транспортного средства согласно варианту осуществления.
Фиг. 3 является схемой, показывающей таблицу рабочих состояний зацепления устройства приведения в движение для гибридного транспортного средства согласно варианту осуществления.
Фиг. 4 является номограммой относительно EV-режима движения за счет одного электромотора.
Фиг. 5 является номограммой относительно EV-режима движения за счет обоих электромоторов.
Фиг. 6 является номограммой относительно HV-режима движения в состоянии диапазона низких скоростей.
Фиг. 7 является номограммой относительно HV-режима движения в состоянии высоких скоростей.
Фиг. 8 является схемой, показывающей линию теоретической эффективности трансмиссии согласно варианту осуществления.
Фиг. 9 является блок-схемой последовательности операций способа относительно управления запуском двигателя варианта осуществления.
Фиг. 10 является временной диаграммой относительно управления запуском двигателя варианта осуществления.
Фиг. 11 является принципиальной схемой транспортного средства согласно первой модификации варианта осуществления.
Фиг. 12 является принципиальной схемой транспортного средства согласно второй модификации варианта осуществления.
Фиг. 13 является принципиальной схемой транспортного средства согласно третьей модификации варианта осуществления.
СПОСОБЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
В дальнейшем в этом документе описывается устройство приведения в движение гибридного транспортного средства согласно варианту осуществления настоящего изобретения со ссылкой на чертежи. Между тем, настоящее изобретение не ограничено посредством варианта осуществления. Дополнительно, компоненты варианта осуществления, описанные ниже, включают в себя компоненты, которые специалисты в данной области техники могут легко представить себе, либо практически эквивалентные им.
ВАРИАНТ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
Вариант осуществления описывается со ссылкой на Фиг. 1-10. Настоящий вариант осуществления относится к устройству приведения в движение для гибридного транспортного средства. Фиг. 1 является принципиальной схемой транспортного средства согласно варианту осуществления настоящего изобретения, а Фиг. 2 является схемой взаимосвязей данных входа-выхода транспортного средства согласно варианту осуществления.
Транспортное средство 100 настоящего варианта осуществления представляет собой гибридное транспортное средство, которое включает в себя двигатель 1, первую вращающуюся электрическую машину MG1 и вторую вращающуюся электрическую машину MG2 в качестве источников мощности. Транспортное средство 100 может представлять собой гибридное транспортное средство со штепсельным соединением для заряда от внешнего источника, допускающее заряд от внешнего источника подачи электрической мощности. Как показано на Фиг. 1 и 2, транспортное средство 100 включает в себя двигатель 1, первую планетарную зубчатую передачу 10, вторую планетарную зубчатую передачу 20, первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, муфту CL1, тормоз BK1, HV ECU 50, MG ECU 60 и ECU 70 двигателя.
Дополнительно, устройство приведения в движение для гибридного транспортного средства 1-1 согласно настоящему варианту осуществления включает в себя первую планетарную зубчатую передачу 10, вторую планетарную зубчатую передачу 20, муфту CL1 и тормоз BK1. Устройство приведения в движение для гибридного транспортного средства 1-1 дополнительно может включать в себя соответствующие устройства управления, такие как ECU 50, 60, 70. Устройство приведения в движение для гибридного транспортного средства 1-1 может применяться к транспортному средству на основе FF (переднего привода с передним расположением двигателя) или к транспортному средству на основе RR (заднего привода с задним расположением двигателя) и т.п. Устройство приведения в движение для гибридного транспортного средства 1-1 монтируется на транспортном средстве 100 с осевым направлением, например, совмещенным с направлением ширины транспортного средства.
В устройстве приведения в движение для гибридного транспортного средства 1-1 настоящего варианта осуществления передаточный механизм состоит из первой планетарной зубчатой передачи 10, муфты CL1 и тормоза BK1. Дополнительно, блок дифференциального механизма состоит из второй планетарной зубчатой передачи 20. Дополнительно, переключающее устройство, которое выполняет переключение скорости первой планетарной зубчатой передачи 10, состоит из муфты CL1 и тормоза BK1.
Двигатель 1, который представляет собой двигатель внутреннего сгорания, преобразует энергию сгорания топлива во вращательное движение выходного вала для вывода мощности. Выходной вал двигателя 1 соединяется с входным валом 2. Входной вал 2 представляет собой входной вал для устройства передачи мощности. Устройство передачи мощности включает в себя первую вращающуюся электрическую машину MG1, вторую вращающуюся электрическую машину MG2, муфту CL1, тормоз BK1 и дифференциальный механизм 30. Входной вал 2 размещается коаксиально с выходным валом двигателя 1 и на выносной линии выходного вала. Входной вал 2 соединяется с первым водилом 14 первой планетарной зубчатой передачи 10.
Первая планетарная зубчатая передача 10 настоящего варианта осуществления соединяется с двигателем 1 и соответствует механизму передачи мощности, который передает вращение двигателя 1. В качестве примера механизма передачи мощности, здесь показывается первая планетарная зубчатая передача 10, которая служит в качестве дифференциального механизма. Первая планетарная зубчатая передача 10 монтируется на транспортном средстве 100 в качестве первого дифференциального механизма. Первая планетарная зубчатая передача 10 представляет собой дифференциальный механизм на стороне входного вала, который размещается на стороне двигателя 1 относительно второй планетарной зубчатой передачи 20. Первая планетарная зубчатая передача 10 может выводить вращение двигателя 1 через переключение скорости. Первая планетарная зубчатая передача 10 представляет собой тип с одинарными планетарными шестернями, включающий в себя первую солнечную шестерню 11, первую планетарную шестерню 12, первую коронную шестерню 13 и первое водило 14.
Первая коронная шестерня 13 является коаксиальной с первой солнечной шестерней 11 и размещается снаружи в радиальном направлении первой солнечной шестерни 11. Первая планетарная шестерня 12 размещается между первой солнечной шестерней 11 и первой коронной шестерней 13 и сцепляется с первой солнечной шестерней 11 и первой коронной шестерней 13. Первая планетарная шестерня 12 поддерживается с возможностью вращения посредством первого водила 14. Первое водило 14 соединяется с входным валом 2 и вращается вместе с входным валом 2. Первая планетарная шестерня 12 может вращаться вокруг центральной оси входного вала 2 вместе с входным валом 2 (вращаться вокруг оси, отличной от собственной) и может вращаться вокруг центральной оси первой планетарной шестерни 12, поддерживаемой посредством первого водила 14 (вращаться вокруг собственной оси).
Муфта CL1 представляет собой устройство муфты, которое может соединять первую солнечную шестерню 11 с первым водилом 14. Хотя муфта CL1, например, может представлять собой муфту с фрикционным зацеплением, она не ограничивается этим типом, и известное устройство муфты, к примеру, кулачковая муфта, может быть использовано в качестве муфты CL1. Муфта CL1 управляется посредством гидравлического давления, например, таким образом, что она зацепляется или расцепляется. Муфта CL1 в состоянии полного зацепления может соединять первую солнечную шестерню 11 с первым водилом 14 и вращать первую солнечную шестерню 11 и первое водило 14 как единое целое. Муфта CL1 в состоянии полного зацепления ограничивает дифференциальное результирующее движение первой планетарной зубчатой передачи 10. С другой стороны, муфта CL1 в состоянии расцепления отделяет первую солнечную шестерню 11 от первого водила 14, чтобы давать возможность первой солнечной шестерне 11 и первому водилу 14 вращаться относительно друг друга. Иными словами, муфта CL1 в состоянии расцепления обеспечивает возможность дифференциального результирующего движения первой планетарной зубчатой передачи 10. Между тем, муфта CL1 может управляться в состояние полузацепления.
Тормоз BK1 является тормозным устройством, допускающим ограничение вращения первой солнечной шестерни 11. Тормоз BK1 включает в себя зацепляющий элемент, который соединяется с первой солнечной шестерней 11, и зацепляющий элемент, который соединяется со стороной кузова транспортного средства, например, с корпусом устройства передачи мощности. Хотя тормоз BK1 может представлять собой устройство муфты с фрикционным зацеплением, аналогичное муфте CL1, он не ограничивается этим типом, и любое известное устройство муфты, такое как кулачковая муфта, может быть использовано в качестве тормоза BK1. Тормоз BK1 управляется посредством гидравлического давления, например, таким образом, что он зацепляется или расцепляется. Тормоз BK1 в состоянии полного зацепления может соединять первую солнечную шестерню 11 со стороной кузова транспортного средства, чтобы ограничивать вращение первой солнечной шестерни 11. С другой стороны, тормоз BK1 в состоянии расцепления отделяет первую солнечную шестерню 11 от стороны кузова транспортного средства, чтобы обеспечивать возможность вращения первой солнечной шестерни 11. Между тем, тормоз BK1 может управляться в состояние полузацепления.
Вторая планетарная зубчатая передача 20 настоящего варианта осуществления соответствует дифференциальному механизму, сконфигурированному с возможностью соединять первую планетарную зубчатую передачу 10 с ведущими колесами 32. Вторая планетарная зубчатая передача 20 монтируется на транспортном средстве 100 в качестве второго дифференциального механизма. Вторая планетарная зубчатая передача 20 представляет собой дифференциальный механизм на стороне выходного вала, который размещается на стороне ведущих колес 32 относительно первой планетарной зубчатой передачи 10. Вторая планетарная зубчатая передача 20 представляет собой тип с одинарными планетарными шестернями, включающий в себя вторую солнечную шестерню 21, вторую планетарную шестерню 22, вторую коронную шестерню 23 и второе водило 24. Вторая планетарная зубчатая передача 20 размещается коаксиально с первой планетарной зубчатой передачей 10 и расположена напротив двигателя 1 через первую планетарную зубчатую передачу 10.
Вторая коронная шестерня 23 является коаксиальной со второй солнечной шестерней 21 и размещается снаружи в радиальном направлении второй солнечной шестерни 21. Вторая планетарная шестерня 22 размещается между второй солнечной шестерней 21 и второй коронной шестерней 23 и сцепляется со второй солнечной шестерней 21 и второй коронной шестерней 23. Вторая планетарная шестерня 22 поддерживается с возможностью вращения посредством второго водила 24. Второе водило 24 соединяется с первой коронной шестерней 13 и вращается вместе с первой коронной шестерней 13. Вторая планетарная шестерня 22 может вращаться вокруг центральной оси входного вала 2 вместе со вторым водилом 24 (вращаться вокруг оси, отличной от собственной) и может вращаться вокруг центральной оси второй планетарной шестерни 22, поддерживаемой посредством второго водила 24 (вращаться вокруг собственной оси). Первая коронная шестерня 13 представляет собой элемент выходного вала первой планетарной зубчатой передачи 10 и может выводить вращение, вводимое в первую планетарную зубчатую передачу 10 из двигателя 1, на второе водило 24. Второе водило 24 соответствует первому вращательному элементу, который соединяется с элементом выходного вала первой планетарной зубчатой передачи 10.
Вращательный вал 33 первой вращающейся электрической машины MG1 соединяется со второй солнечной шестерней 21. Вращательный вал 33 первой вращающейся электрической машины MG1 размещается коаксиально с входным валом 2 и вращается вместе со второй солнечной шестерней 21. Вторая солнечная шестерня 21 соответствует второму вращательному элементу, соединенному с первой вращающейся электрической машиной MG1. Ведущая шестерня 25 привода промежуточного вала соединяется со второй коронной шестерней 23. Ведущая шестерня 25 привода промежуточного вала представляет собой выходную шестерню, которая вращается вместе со второй коронной шестерней 23. Вторая коронная шестерня 23 соответствует третьему вращательному элементу, который соединяется со второй вращающейся электрической машиной MG2 и ведущими колесами 32. Вторая коронная шестерня 23 представляет собой элемент выходного вала, допускающий вывод вращения, вводимого из первой вращающейся электрической машины MG1 или первой планетарной зубчатой передачи 10, на ведущие колеса 32.
Ведущая шестерня 25 привода промежуточного вала сцепляется с ведомой шестерней 26 привода промежуточного вала. Ведомая шестерня 26 привода промежуточного вала соединяется с приводной ведущей шестерней 28 через промежуточный вал 27. Ведомая шестерня 26 привода промежуточного вала вращается вместе с приводной ведущей шестерней 28. Редуктор 35 сцепляется с ведомой шестерней 26 привода промежуточного вала. Редуктор 35 соединяется с вращательным валом 34 второй вращающейся электрической машины MG2. Иными словами, вращение второй вращающейся электрической машины MG2 передается на ведомую шестерню 26 привода промежуточного вала через редуктор 35. Редуктор 35 имеет меньший диаметр, чем ведомая шестерня 26 привода промежуточного вала, и уменьшает частоту вращения второй вращающейся электрической машины MG2 и передает на ведомую шестерню 26 привода промежуточного вала.
Приводная ведущая шестерня 28 сцепляется с коронной шестерней 29 дифференциального механизма для дифференциального механизма 30. Дифференциальный механизм 30 соединяется с ведущими колесами 32 через правый/левый ведущие валы 31. Вторая коронная шестерня 23 соединяется с ведущими колесами 32 через ведущую шестерню 25 привода промежуточного вала, ведомую шестерню 26 привода промежуточного вала, приводную ведущую шестерню 28, дифференциальный механизм 30 и ведущий вал 31. Вторая вращающаяся электрическая машина MG2 соединяется с трактом передачи мощности между второй коронной шестерней 23 и ведущими колесами 32 и допускает передачу мощности на каждое из второй коронной шестерни 23 и ведущих колес 32.
Первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 имеют функцию в качестве электромотора (электромотора) и функцию в качестве генератора. Первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 соединяются с аккумулятором через инвертор. Первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 могут преобразовывать электроэнергию, поданную из аккумулятора, в механическую энергию и выводить и могут приводиться в действие посредством входной мощности, чтобы преобразовывать механическую энергию в электроэнергию. Электроэнергия, сформированная посредством вращающихся электрических машин MG1, MG2, может накапливаться в аккумуляторе. В качестве первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2, например, может быть использован синхронный электромотор-генератор переменного тока.
В транспортном средстве 100 настоящего варианта осуществления, коаксиально с двигателем 1, тормоз BK1, муфта CL1, первая планетарная зубчатая передача 10, ведущая шестерня 25 привода промежуточного вала, вторая планетарная зубчатая передача 20 и первая вращающаяся электрическая машина MG1 размещаются в таком порядке со стороны двигателя 1. Устройство приведения в движение для гибридного транспортного средства 1-1 настоящего варианта осуществления сконструировано как устройство многоосного типа, в котором входной вал 2 и вращательный вал 34 второй вращающейся электрической машины MG2 размещаются на различных осях.
Как показано на Фиг. 2, транспортное средство 100 включает в себя HV ECU 50, MG ECU 60 и ECU 70 двигателя. Соответствующие ECU 50, 60, 70 представляют собой электронные модули управления, содержащие компьютер. HV ECU 50 имеет функцию выполнения интегрированного управления для всего транспортного средства 100. MG ECU 60 и ECU 70 двигателя соединяются электрически с HV ECU 50.
MG ECU 60 может управлять первой вращающейся электрической машиной MG1 и второй вращающейся электрической машиной MG2. MG ECU 60 может регулировать значение тока, поданное в первую вращающуюся электрическую машину MG1, для того чтобы управлять выходным крутящим моментом первой вращающейся электрической машины MG1, и затем может регулировать значение тока, поданное во вторую вращающуюся электрическую машину MG2, например, для того, чтобы управлять выходным крутящим моментом второй вращающейся электрической машины MG2.
ECU 70 двигателя может управлять двигателем 1. ECU 70 двигателя, например, может управлять открытием электронного дроссельного клапана двигателя 1, выполнять управление зажиганием двигателя посредством вывода сигнала зажигания и выполнять управление впрыском топлива в двигатель 1 и т.п. ECU 70 двигателя может управлять выходным крутящим моментом двигателя 1 посредством управления открытием электронного дроссельного клапана, управления впрыском, управления зажиганием и т.п.
Датчик скорости транспортного средства, датчик рабочей величины нажатия педали акселератора, датчик частоты вращения MG1, датчик частоты вращения MG2, датчик частоты вращения выходного вала, датчик заряда аккумулятора и т.п. соединяются с HV ECU 50. Через эти датчики HV ECU 50 может получать скорость транспортного средства, рабочую величину нажатия педали акселератора, частоту вращения первой вращающейся электрической машины MG1, частоту вращения второй вращающейся электрической машины MG2, частоту вращения выходного вала устройства передачи мощности, состояние SOC аккумулятора и т.п.
На основе полученной информации, HV ECU 50 может вычислять запрашиваемую мощность приведения в движение, запрашиваемую мощность, запрашиваемый крутящий момент т.п. для транспортного средства 100. На основе вычисленных запрашиваемых значений, HV ECU 50 определяет выходной крутящий момент первой вращающейся электрической машины MG1 (в дальнейшем также называемый "крутящим моментом MG1"), выходной крутящий момент второй вращающейся электрической машины MG2 (в дальнейшем также называемый "крутящим моментом MG2") и выходной крутящий момент двигателя 1 (в дальнейшем также называемый "крутящим моментом двигателя"). HV ECU 50 выводит значение команды управления относительно крутящего момента MG1 и значение команды управления относительно крутящего момента MG2 к MG ECU 60. Дополнительно, HV ECU 50 выводит значение команды управления относительно крутящего момента двигателя в ECU 70 двигателя.
HV ECU 50 управляет муфтой CL1 и тормозом BK1 на основе режима движения, описанного ниже, и т.п. HV ECU 50 выводит значение (PbCL1) команды управления относительно поданного гидравлического давления в муфту CL1 и значение (PbBK1) команды управления относительно поданного гидравлического давления в тормоз BK1. Устройство управления гидравлическим давлением (не показано) управляет поданными гидравлическими давлениями в муфту CL1 и тормоз BK1, соответствующими надлежащим значениям PbCL1, PbBK1 команды управления.
Фиг. 3 является схемой, показывающей таблицу рабочих состояний зацепления устройства приведения в движение для гибридного транспортного средства 1-1 согласно настоящему варианту осуществления. Транспортное средство 100 может выполнять гибридный (HV) режим движения или EV-режим движения избирательно. HV-режим движения означает режим движения для приведения в движение транспортного средства 100 с помощью двигателя 1, используемого в качестве источника мощности. При HV-режиме движения вторая вращающаяся электрическая машина MG2 может быть дополнительно использована в качестве источника мощности, а также двигателя 1.
EV-режим движения означает режим движения для движения, по меньшей мере, с любой из первой вращающейся электрической машины MG1 и второй вращающейся электрической машины MG2, используемой в качестве источника мощности. При EV-режиме движения транспортное средство может двигаться с остановленным двигателем 1. Что касается EV-режима движения, устройство приведения в движение для гибридного транспортного средства 1-1 согласно настоящему варианту осуществления имеет EV-режим движения за счет одного электромотора для приведения в движение транспортного средства 100 с помощью второй вращающейся электрической машины MG2 в качестве источника мощности и EV-режим движения за счет обоих электромоторов для приведения в движение транспортного средства 100 с помощью первой вращающейся электрической машины MG1 и со второй вращающейся электрической машины MG2 в качестве источников мощности.
В таблице состояний зацепления по Фиг. 3, круг в столбцах муфты CL1 и тормоза BK1 указывает зацепление, тогда как пустое место указывает расцепление. Дополнительно, треугольник указывает, что любое из зацепления и расцепления является возможным. EV-режим движения за счет одного электромотора выполняется, например, с расцепленными муфтой CL1 и тормозом BK1. Фиг. 4 является номограммой относительно EV-режима движения за счет одного электромотора. На номограмме символы S1, C1, R1 обозначают первую солнечную шестерню 11, первое водило 14 и первую коронную шестерню, соответственно. Символы S2, C2, R2 обозначают вторую солнечную шестерню 21, второе водило 24 и вторую коронную шестерню 23, соответственно.
Когда выбирается EV-режим движения за счет одного электромотора, муфта CL1 и тормоз BK1 расцепляются. Когда тормоз BK1 расцепляется, солнечной шестерне 11 разрешено вращаться, а когда муфта CL1 расцепляется, первая планетарная зубчатая передача 10 может выполнять дифференциальное результирующее движение. HV ECU 50 инструктирует второй вращающейся электрической машине MG2 выводить положительный крутящий момент через MG ECU 60, чтобы инструктировать транспортному средству 100 формировать мощность приведения в движение в прямом направлении. Вторая коронная шестерня 23 вращается в положительном направлении, сцепленном с вращением ведущих колес 32. Вращение в положительном направлении, упомянутое здесь, предполагается в качестве направления вращения второй коронной шестерни 23, когда транспортное средство 100 движется передним ходом. HV ECU 50 инструктирует первой вращающейся электрической машине MG1 работать в качестве генератора, чтобы уменьшать потери на сопротивление вследствие торможения. Более конкретно, HV ECU 50 инструктирует первой вращающейся электрической машине MG1 вырабатывать электроэнергию с незначительным прикладываемым крутящим моментом и переключает частоту вращения первой вращающейся электрической машины MG1 на нулевое вращение. Как результат, могут уменьшаться потери на сопротивление вследствие торможения первой вращающейся электрической машины MG1.
Первая коронная шестерня 13 вращается в нормальном направлении совместно со вторым водилом 24. Поскольку в первой планетарной зубчатой передаче 10, муфта CL1 и тормоз BK1 расцепляются, так что они находятся в состоянии нейтрали, двигатель не замедляет вращение вследствие внутреннего сопротивления, так что первое водило 14 прекращает свое вращение. Таким образом, может получаться значительная величина рекуперации. Солнечная шестерня 11 становится бездействующей и затем вращается в обратном направлении. Между тем, состояние нейтрали (нейтраль) первой планетарной зубчатой передачи 10 означает состояние, в котором мощность не передается между первой коронной шестерней 13 и первым водилом 14, т.е. состояние, в котором двигатель 1 отделяется от второй планетарной зубчатой передачи 20, так что передача мощности прерывается. Если, по меньшей мере, любой из муфты CL1 передаточного механизма и тормоза BK1 передаточного механизма зацепляется, первая планетарная зубчатая передача 10 переходит в соединенное состояние, которое соединяет двигатель 1 со второй планетарной зубчатой передачей 20.
При движении в EV-режиме движения за счет одного электромотора может возникать случай, в котором состояние заряда аккумулятора становится полным, так что не может получаться рекуперативная энергия. В этом случае, может рассматриваться возможность одновременно использовать моторный тормоз. Посредством зацепления муфты CL1 или тормоза BK1, чтобы соединять двигатель 1 с ведущими колесами 32, моторный тормоз может применяться к ведущим колесам 32. Если, как указано с помощью символа треугольника на Фиг. 3, муфта CL1 или тормоз BK1 зацепляется в EV-режиме движения за счет одного электромотора, двигатель 1 замедляет вращение вследствие внутреннего сопротивления совместно, и посредством повышения частоты вращения двигателя посредством первой вращающейся электрической машины MG1, может получаться состояние торможения двигателем.
Когда выбирается EV-режим движения за счет обоих электромоторов, HV ECU 50 зацепляет муфту CL1 и тормоз BK1. Фиг. 5 является номограммой относительно EV-режима движения за счет обоих электромоторов. Когда муфта CL1 зацепляется, дифференциальное результирующее движение первой планетарной зубчатой передачи 10 ограничивается, а когда тормоз BK1 зацепляется, вращение первой солнечной шестерни 11 ограничивается. Таким образом, прекращаются вращения всех вращающихся элементов первой планетарной зубчатой передачи 10. Когда вращение первой коронной шестерни 13, которая представляет собой элемент выходного вала, ограничивается, присоединенное второе водило 24 стопорится до нулевого вращения.
HV ECU 50 инструктирует первой вращающейся электрической машине MG1 и второй вращающейся электрической машине MG2 выводить крутящий момент приведения в движение для передвижения. Поскольку вращение второго водила 24 ограничивается, оно может получать силу реакции против крутящего момента первой вращающейся электрической машины MG1 и выводить крутящий момент первой вращающейся электрической машины MG1 из второй коронной шестерни 23. Посредством вывода отрицательного крутящего момента во время движения передним ходом, чтобы достигать отрицательного вращения, первая вращающаяся электрическая машина MG1 может выводить положительный крутящий момент из второй коронной шестерни 23. С другой стороны, посредством вывода положительного крутящего момента во время движения задним ходом, чтобы достигать положительного вращения, первая вращающаяся электрическая машина MG1 может выводить отрицательный крутящий момент из второй коронной шестерни 23.
При HV-режиме движения, вторая планетарная зубчатая передача 20, которая служит в качестве блока дифференциального механизма, по существу, переводится в рабочее состояние, и первая планетарная зубчатая передача 10, которая служит в качестве передаточного механизма, изменяется на режим низких/высоких скоростей. Фиг. 6 является номограммой относительно HV-режима движения (в дальнейшем также описываемого в качестве "HV-режима диапазона низких скоростей") в состоянии низких скоростей, а Фиг. 7 является номограммой относительно HV-режима движения (в дальнейшем также описываемого в качестве "HV-режима диапазона высоких скоростей") в состоянии высоких скоростей.
Когда выбирается HV-режим диапазона низких скоростей, HV ECU 50 зацепляет муфту CL1 и расцепляет тормоз BK1. Если муфта CL1 зацепляется, дифференциальное результирующее движение первой планетарной зубчатой передачи 10 ограничивается, так что вращательные элементы 11, 13, 14 вращаются как единое целое. Таким образом, вращение двигателя 1 передается из первой коронной шестерни 13 на второе водило 24 на эквивалентной частоте без ускорения или замедления.
С другой стороны, когда выбирается HV-режим диапазона высоких скоростей, HV ECU 50 расцепляет муфту CL1 и зацепляет тормоз BK1. Если тормоз BK1 зацепляется, вращение первой солнечной шестерни 11 ограничивается. Таким образом, в первой планетарной зубчатой передаче 10, вращение двигателя 1, вводимое в первое водило 14, ускоряется, в силу этого приводя к состоянию повышающей передачи (OD), в котором оно выводится через первую коронную шестерню 13. Таким образом, первая планетарная зубчатая передача 10 может ускорять и выводить вращение двигателя 1. Передаточное отношение трансмиссии первой планетарной зубчатой передачи 10 во время повышающей передачи может задаваться равным, например, 0,7.
Таким образом, переключающее устройство, которое состоит из муфты CL1 и тормоза BK1, выполняет переключение скорости первой планетарной зубчатой передачи 10 посредством переключения между состоянием ограничения дифференциального результирующего движения первой планетарной зубчатой передачи 10 и состоянием разрешения дифференциального результирующего движения первой планетарной зубчатой передачи 10.
HV ECU 50 выбирает HV-режим диапазона высоких скоростей, например, на высокой скорости транспортного средства, а на средней/низкой скорости транспортного средства выбирает HV-режим диапазона низких скоростей. Согласно настоящему варианту осуществления, вращение двигателя 1 выводится через переключение скорости, которое выполняется посредством переключения между HV-режимом диапазона высоких скоростей и HV-режимом диапазона низких скоростей, и, следовательно, могут формироваться две механические точки, описанные ниже, за счет этого повышая эффективность использования топлива. Фиг. 8 является схемой, показывающей линию теоретической эффективности трансмиссии согласно настоящему варианту осуществления.
На Фиг. 8 ось абсцисс указывает передаточное отношение трансмиссии, а ось ординат указывает теоретическую эффективность трансмиссии. Здесь, передаточное отношение трансмиссии означает отношение (передаточное отношение редуктора) частоты вращения на стороне входного вала к частоте вращения на стороне выходного вала планетарных зубчатых передач 10, 20 и, например, указывает отношение частоты вращения первого водила 14 к частоте вращения второй коронной шестерни 23. На оси абсцисс ее левая сторона указывает сторону высшей передачи, имеющую низкое передаточное отношение трансмиссии, а правая сторона указывает сторону низшей передачи, имеющую высокое передаточное отношение трансмиссии. Когда вся входная мощность в планетарные зубчатые передачи 10, 20 передается в ведущую шестерню 25 привода промежуточного вала через механическую трансмиссию, а не через электрический тракт, теоретическая эффективность трансмиссии переключается на максимальную эффективность в 1,0.
Линия кривой, показанная на Фиг. 8, представляет собой линию теоретической эффективности трансмиссии в HV-режиме движения, когда HV-режим диапазона высоких скоростей и HV-режим диапазона низких скоростей переключаются надлежащим образом. Например, режим с более высокой эффективностью из HV-режима диапазона высоких скоростей и HV-режима диапазона низких скоростей выбирается при эквивалентном передаточном отношении трансмиссии. Собственно говоря, правая сторона указывает линию теоретической эффективности трансмиссии в HV-режиме диапазона низких скоростей, а левая сторона указывает линию теоретической эффективности трансмиссии в HV-режиме диапазона высоких скоростей. Эффективность трансмиссии в HV-режиме диапазона низких скоростей становится максимальной эффективностью при передаточном отношении трансмиссии в γ1. При передаточном отношении трансмиссии в γ1 частота вращения первой вращающейся электрической машины MG1 (второй солнечной шестерни 21) переключается на нуль. Таким образом, при передаточном отношении γ1 трансмиссии, электрический путь, начинающийся посредством приема посредством первой вращающейся электрической машины MG1 силы реакции, является нулевым, и мощность может быть передана из двигателя 1 на ведущую шестерню 25 привода промежуточного вала только посредством механической передачи мощности. Это передаточное отношение γ1 трансмиссии представляет собой передаточное отношение трансмиссии на стороне повышающей передачи, т.е. передаточное отношение трансмиссии, меньшее 1. В настоящем описании изобретения, это передаточное отношение γ1 трансмиссии также описывается как "первое передаточное отношение γ1 механической трансмиссии".
Теоретическая эффективность трансмиссии в HV-режиме диапазона высоких скоростей достигает максимальной эффективности при передаточном отношении γ2 трансмиссии. В HV-режиме диапазона высоких скоростей частота вращения первой вращающейся электрической машины MG1 (второй солнечной шестерни 21) становится нулевой при передаточном отношении трансмиссии в γ2, так что мощность может быть передана из двигателя 1 на ведущую шестерню 25 привода промежуточного вала только посредством передачи механической энергии. Это передаточное отношение γ2 трансмиссии представляет собой передаточное отношение трансмиссии на стороне высшей передачи относительно первого передаточного отношения γ1 механической трансмиссии. В настоящем описании изобретения, это передаточное отношение γ2 трансмиссии также описывается как "второе передаточное отношение γ2 механической трансмиссии".
Теоретическая эффективность трансмиссии HV-режима движения снижается по мере того, как передаточное отношение трансмиссии изменяется на значения на стороне низшей передачи относительно первого передаточного отношения γ1 механической трансмиссии. Дополнительно, теоретическая эффективность трансмиссии HV-режима движения снижается по мере того, как передаточное отношение трансмиссии изменяется на значения на стороне высшей передачи относительно второго передаточного отношения γ2 механической трансмиссии. Теоретическая эффективность трансмиссии HV-режима движения искривляется к стороне с более низкой эффективностью в диапазоне передаточного отношения трансмиссии между первым передаточным отношением γ1 механической трансмиссии и вторым передаточным отношением γ2 механической трансмиссии.
Как описано выше, устройство приведения в движение для гибридного транспортного средства 1-1 согласно настоящему варианту осуществления имеет две механические точки на стороне высшей передачи относительно передаточного отношения трансмиссии 1. Посредством предоставления передаточного механизма, включающего в себя первую планетарную зубчатую передачу 10, муфту CL1 и тормоз BK1, устройство приведения в движение для гибридного транспортного средства 1-1 может формировать вторую механическую точку (второе передаточное отношение γ2 механической трансмиссии) на стороне высшей передачи относительно механической точки (первого передаточного отношения γ1 механической трансмиссии) для случая, когда двигатель 1 соединяется непосредственно со вторым водилом 24. Таким образом, может повышаться эффективность трансмиссии, когда активируется высшая передача. Иными словами, может достигаться гибридная система, допускающая повышение эффективности использования топлива посредством повышения эффективности трансмиссии во время высокоскоростного движения.
Когда HV ECU 50 переключается между HV-режимом диапазона высоких скоростей и HV-режимом диапазона низких скоростей, он выполняет совместное управление переключением скорости при выполнении переключения скорости в первой планетарной зубчатой передаче 10 и второй планетарной зубчатой передаче 20 одновременно. При совместном управлении переключением скорости HV ECU 50 увеличивает передаточное отношение трансмиссии одной из первой планетарной зубчатой передачи 10 и второй планетарной зубчатой передачи 20 при снижении передаточного отношения трансмиссии другой.
Когда HV ECU 50 переключается с HV-режима диапазона высоких скоростей на HV-режим диапазона низких скоростей, он изменяет передаточное отношение трансмиссии второй планетарной зубчатой передачи 20 на сторону высшей передачи синхронно с переключением режима. Как результат, непрерывное изменение передаточного отношения трансмиссии из двигателя 1 на ведущие колеса 32 всего транспортного средства 100 может подавляться или уменьшаться, в силу этого уменьшая степень изменения передаточного отношения трансмиссии. Поскольку изменение передаточного отношения трансмиссии из двигателя 1 на ведущие колеса 32 подавляется, может уменьшаться величина регулирования частоты вращения двигателя, сопровождаемого посредством переключения скорости, или может исключаться необходимость регулирования частоты вращения двигателя. Например, чтобы давать возможность непрерывного изменения передаточного отношения трансмиссии всего транспортного средства 100 на сторону низких значений, HV ECU 50 выполняет переключение скорости первой планетарной зубчатой передачи 10 и второй планетарной зубчатой передачи 20 совместно друг с другом.
С другой стороны, когда HV ECU 50 переключается с HV-режима диапазона низких скоростей на HV-режим диапазона высоких скоростей, он изменяет передаточное отношение трансмиссии второй планетарной зубчатой передачи 20 на сторону низшей передачи синхронно с переключением режима. Как результат, непрерывное изменение передаточного отношения трансмиссии всего транспортного средства 100 может подавляться или уменьшаться, в силу этого уменьшая степень изменения передаточного отношения трансмиссии. Например, чтобы давать возможность непрерывного изменения передаточного отношения трансмиссии всего транспортного средства 100 на сторону высоких значений, HV ECU 50 выполняет переключение скорости первой планетарной зубчатой передачи 10 и второй планетарной зубчатой передачи 20 посредством взаимодействия между собой.
Регулирование передаточного отношения трансмиссии второй планетарной зубчатой передачи 20 выполняется, например, посредством управления частотой вращения первой вращающейся электрической машины MG1. HV ECU 50 управляет первой вращающейся электрической машиной MG1, например, так чтобы изменять передаточное отношение трансмиссии между входным валом 2 и ведущей шестерней 25 привода промежуточного вала бесступенчато. Как результат, все из планетарных зубчатых передач 10, 20 первой вращающейся электрической машины MG1, муфты CL1 и тормоза BK1, т.е. передаточное устройство, включающее в себя блок дифференциального механизма и передаточный механизм, работают в качестве электрической бесступенчатой трансмиссии.
Управление запуском двигателя
Далее описывается управление запуском двигателя устройства приведения в движение для гибридного транспортного средства 1-1 согласно настоящему варианту осуществления. Когда HV ECU 50 изменяется, например, с EV-режима движения на HV-режим движения, запускается двигатель 1, который остановлен. HV ECU 50 запускает двигатель 1, например, за счет вращения двигателя 1 посредством первой вращающейся электрической машины MG1. Управление запуском двигателя описывается со ссылкой на Фиг. 9. Фиг. 9 является блок-схемой последовательности операций способа относительно управления запуском двигателя согласно настоящему варианту осуществления, а Фиг. 10 является временной диаграммой относительно управления запуском двигателя согласно настоящему варианту осуществления. На Фиг. 10, (a) указывает частоту вращения двигателя, (b) указывает крутящий момент MG1, (c) указывает частоту вращения первой вращающейся электрической машины MG1, (d) указывает крутящий момент MG2, (e) указывает частоту вращения второй вращающейся электрической машины MG2, (f) указывает гидравлическое давление муфты CL1, (g) указывает гидравлическое давление тормоза BL1, и (h) указывает состояние SOC заряда. Последовательность операций управления, показанная на Фиг. 9, выполняется, например, в ходе движения в EV-режиме движения.
На этапе S10 то, меньше или нет состояние SOC заряда меньше порогового значения Sf, определяется посредством HV ECU 50. Это пороговое значение Sf используется для определения того, должен или нет быть заряжен аккумулятор, например, посредством запуска двигателя 1. Если в результате определения этапа S10 определяется то, что состояние SOC заряда меньше порогового значения Sf ("Да" на этапе S10), обработка переходит к этапу S20, а в противном случае ("Нет" на этапе S10), обработка переходит к этапу S90. На Фиг. 10 состояние SOC заряда становится меньше порогового значения Sf во время t1, и положительное определение выполняется на этапе S10.
На этапе S20 то, выбран или нет EV-режим движения за счет одного электромотора посредством второй вращающейся электрической машины MG2, определяется посредством HV ECU 50. Если требуемая мощность приведения в движение для транспортного средства 100 меньше предварительно определенного значения P1, выбирается EV-режим движения за счет одного электромотора посредством второй вращающейся электрической машины MG2. С другой стороны, если требуемая мощность равна или превышает предварительно определенное значение 1, выбирается EV-режим движения за счет обоих электромоторов. Если в результате определения на этапе S20, определяется то, что транспортное средство 100 движется в EV-режиме движения за счет одного электромотора ("Да" на этапе S20), обработка переходит к этапу S30, а в противном случае ("Нет" на этапе S20), обработка переходит к этапу S60.
На этапе S30 переключение зацепления муфты CL1 выполняется посредством HV ECU 50. EV-режим движения за счет одного электромотора включает в себя случай, в котором муфта CL1 и тормоз BK1 расцепляются, случай, в котором муфта CL1 зацепляется, в то время как тормоз BK1 расцепляется, и случай, в котором муфта CL1 расцепляется, в то время как тормоз BK1 зацепляется. HV ECU 50 переключается в состояние, в котором муфта CL1 зацепляется, в то время как тормоз BK1 расцепляется. Если выполняется этап S30, обработка переходит к этапу S40.
На этапе S40, HV ECU 50 выполняет управление запуском двигателя посредством управления частотой вращения первой вращающейся электрической машины MG1. Когда муфта CL1 зацепляется, двигатель 1 соединяется с первой вращающейся электрической машиной MG1, второй вращающейся электрической машиной MG2 и ведущими колесами 32, двигатель 1 замедляет вращение вследствие внутреннего сопротивления совместно с ними. HV ECU 50 задает частоту вращения второго водила 24 равной нулю посредством управления частотой вращения первой вращающейся электрической машины MG1, например, с тем, чтобы зацеплять муфту CL1 передаточного механизма. После того, как муфта CL1 передаточного механизма зацепляется, HV ECU 50 повышает частоту вращения двигателя посредством управления частотой вращения первой вращающейся электрической машины MG1. Когда частота вращения двигателя повышается до предварительно определенной частоты вращения, HV ECU 50 подает топливо в двигатель 1 и запускает двигатель 1 посредством управления зажиганием. После того, как выполняется этап S40, обработка переходит к этапу S50.
Между тем, когда муфта CL1 зацепляется, HV ECU 50 может увеличивать поданное гидравлическое давление в муфту CL1 постепенно с вращением второго водила 24 и плавно зацеплять муфту CL1. После того, как муфта CL1 полностью зацепляется, или одновременно с тем, когда увеличивается перегрузочная способность по крутящему моменту муфты для муфты CL1, HV ECU 50 увеличивает частоту вращения двигателя посредством управления частотой вращения первой вращающейся электрической машины MG1.
На этапе S50, управление реактивным крутящим моментом второй вращающейся электрической машиной MG2 выполняется посредством HV ECU 50. Когда частота вращения двигателя увеличивается посредством управления частотой вращения первой вращающейся электрической машины MG1, реактивный крутящий момент при запуске прикладывается ко второй коронной шестерне 23 вследствие крутящего момента MG1. Этот реактивный крутящий момент при запуске представляет собой крутящий момент в отрицательном направлении и уменьшает мощность при движении транспортного средства 100. HV ECU 50 увеличивает крутящий момент второй вращающейся электрической машины MG2 в положительном направлении, чтобы блокировать утечку мощности приведения в движение вследствие реактивного крутящего момента при запуске. Иными словами, управление реактивным крутящим моментом сконфигурировано с возможностью инструктировать второй вращающейся электрической машине MG2 выводить крутящий момент отмены для отмены реактивного крутящего момента при запуске. Как результат, подавляется уменьшение общей характеристики управляемости вследствие флуктуации в крутящем моменте во время запуска двигателя. Когда выполняется этап S50, настоящая последовательность операций управления завершается.
На этапе S60, переключение для расцепления тормоза BK1 выполняется посредством HV ECU 50. В EV-режиме движения за счет обоих электромоторов зацепляется каждый из муфты CL1 и тормоза BK1. HV ECU 50 переключается в состояние, в котором тормоз BK1 расцепляется, в то время как муфта CL1 зацепляется. Ссылаясь на Фиг. 10, расцепление тормоза BK1 начинается во время t2. После того, как выполняется этап S60, обработка переходит к этапу S70.
На этапе S70, HV ECU 50 выполняет управление запуском двигателя посредством управления частотой вращения первой вращающейся электрической машины MG1. В то время, когда тормоз BK1 расцепляется, HV ECU 50 изменяет крутящий момент MG1 с отрицательного крутящего момента вверх вплоть до нуля. Когда расцепление тормоза BK1 завершается во время t3, HV ECU 50 изменяет крутящий момент MG1 на положительный крутящий момент и заставляет вращение первой вращающейся электрической машины MG1 изменяться на вращение в нормальном направлении. С повышением частоты вращения первой вращающейся электрической машины MG1, повышается частота вращения двигателя. В это время, крутящий момент MG1 может быть постоянным значением или может изменяться на основе частоты вращения первой вращающейся электрической машины MG1. Когда частота вращения двигателя достигает предварительно определенной частоты вращения во время t4, HV ECU 50 подает топливо в двигатель 1, чтобы начинать работу двигателя. После того, как начинается работа двигателя 1 в режиме самоподдержания, крутящий момент MG1 переключается на отрицательный крутящий момент, так что первая вращающаяся электрическая машина MG1 принимает реактивный крутящий момент двигателя 1. После того, как выполняется этап S70, обработка переходит к этапу S80.
На этапе S80 управление реактивным крутящим моментом второй вращающейся электрической машиной MG2 выполняется посредством HV ECU 50. Управление реактивным крутящим моментом на этапе S80 может быть идентичным управлению реактивным крутящим моментом на этапе S50. На Фиг. 10, крутящий момент MG2 увеличивается посредством управления реактивным крутящим моментом во время t3. Во время t4, когда начинается зажигание двигателя 1, и крутящий момент двигателя начинает выводиться, управление реактивным крутящим моментом завершается, и уменьшается крутящий момент MG2. Когда выполняется этап S80, настоящая последовательность операций управления завершается.
На этапе S90 движение за счет электромотора продолжается посредством HV ECU 50. Поскольку запуск двигателя не требуется, HV ECU 50 продолжает движение в EV-режиме движения. Когда выполняется этап S90, настоящая последовательность операций управления завершается.
Как описано выше, устройство приведения в движение для гибридного транспортного средства 1-1 согласно настоящему варианту осуществления допускает переключение между HV-режимом диапазона высоких скоростей и HV-режимом диапазона низких скоростей посредством передаточного механизма, который включает в себя первую планетарную зубчатую передачу 10, муфту CL1 и тормоз BK1, чтобы повышать эффективность трансмиссии транспортного средства 100. Дополнительно, вторая планетарная зубчатая передача 20, которая служит в качестве блока дифференциального механизма, соединена последовательно с задней частью передаточного механизма. Поскольку первая планетарная зубчатая передача 10 находится в состоянии повышающей передачи, предоставляется такое преимущество, что первая вращающаяся электрическая машина MG1 не должна переводиться в режим высокого крутящего момента в значительной степени.
Дополнительно, посредством зацепления муфты CL1 и тормоза BK1 передаточного механизма, вращение элемента входного вала второй планетарной зубчатой передачи 20 может быть ограничено, так что может выполняться движение в EV-режиме движения за счет обоих электромоторов. Таким образом, необязательно предоставлять специальные муфты и т.п. для того, чтобы достигать EV-режима движения за счет обоих электромоторов, в силу этого конструкция упрощается. Компоновка настоящего варианта осуществления обеспечивает повышение передаточного отношения редуктора второго вращающегося электрического устройства MG2. Помимо этого, FF- или RR-компоновка позволяет достигать компактной компоновки.
Дополнительно, в ходе движения в EV-режиме движения за счет одного электромотора, частота вращения двигателя поддерживается практически нулевой посредством расцепления муфты CL1 и тормоза BK1 передаточного механизма в состояние нейтрали. Таким образом, не требуется специальная муфта для отделения двигателя.
Дополнительно, средство фиксированного задания для фиксированного задания частоты вращения двигателя, равной нулю, посредством зацепления вращающихся элементов передаточного механизма между собой состоит из множества зацепляющих устройств. Более конкретно, средство фиксированного задания настоящего варианта осуществления включает в себя два зацепляющих устройства, т.е. муфту CL1 и тормоз BK1. Когда двигатель 1 запускается из EV-режима движения за счет обоих электромоторов, один из блоков зацепления поддерживается зацепленным, в то время как другой блок зацепления расцепляется, чтобы переключаться в состояние передачи мощности. Поскольку только один блок зацепления расцепляется, управление увеличением частоты вращения двигателя посредством первой вращающейся электрической машины MG1 может легко выполняться, когда двигатель запускается.
Дополнительно, в ходе движения HV, HV-режим диапазона высоких скоростей и HV-режим диапазона низких скоростей могут переключаться посредством выполнения переключения скорости передаточного механизма. Поскольку две механические точки могут быть получены посредством этого переключения скорости, формирование рециркуляции мощности может подавляться посредством выбора надлежащего передаточного отношения трансмиссии во время высокоскоростного движения. Дополнительно, посредством одновременного выполнения переключения скорости второй планетарной зубчатой передачи 20 во время переключения скорости передаточного механизма, внезапное изменение передаточного отношения трансмиссии может подавляться.
Хотя в настоящем варианте осуществления, во время запуска двигателя из EV-режима движения за счет одного электромотора, предполагается, что муфта CL1 зацепляется, в то время как тормоз BK1 расцепляется, вместо этого запуск двигателя может выполняться в состоянии, в котором тормоз BK1 зацепляется, в то время как муфта CL1 расцепляется.
Хотя муфта CL1 настоящего варианта осуществления имеет такую конструкцию, чтобы соединять первую солнечную шестерню 11 с первым водилом 14, настоящее изобретение не ограничено этим примером. Любая муфта CL1 может быть использована при условии, что она может ограничивать дифференциальное результирующее движение первой планетарной зубчатой передачи 10 посредством соединения соответствующих вращательных элементов 11, 13, 14 первой планетарной зубчатой передачи 10. Дополнительно, тормоз BK1 не ограничивается тормозом, который ограничивает вращение первой солнечной шестерни 11. Тормоз BK1 может быть тормозом, который ограничивает вращение другого вращающегося элемента первой планетарной зубчатой передачи 10.
Любое переключающее устройство может быть использовано при условии, что оно может переключаться между состоянием ограничения вращения выходного элемента первой планетарной зубчатой передачи 10 и состоянием разрешения вращения выходного элемента, и в силу этого настоящее изобретение не ограничено проиллюстрированной комбинацией муфты CL1 и тормоза BK1.
Хотя в настоящем варианте осуществления, механизм передачи мощности и дифференциальный механизм (дифференциальный механизм на стороне выходного вала) представляют собой планетарные зубчатые передачи 10, 20, соответственно, настоящее изобретение не ограничено этим примером. Механизм передачи мощности может представлять собой другой известный дифференциальный механизм или любую зубчатую передачу, допускающую переключение на несколько передаточных отношений. Дополнительно, в качестве дифференциального механизма на стороне выходного вала, может использоваться другой известный дифференциальный механизм.
Механизм передачи мощности может иметь, например, тип парной муфты. Например, механизм передачи мощности может включать в себя первый передаточный блок, который передает вращение двигателя 1 на вторую планетарную зубчатую передачу 20 при первом передаточном отношении трансмиссии через первую муфту, и второй передаточный блок, который передает вращение двигателя 1 на вторую планетарную зубчатую передачу 20 при втором передаточном отношении трансмиссии через вторую муфту. Первое передаточное отношение трансмиссии и второе передаточное отношение трансмиссии отличаются друг от друга. Этот механизм передачи мощности переходит в соединенное состояние, допускающее передачу мощности из двигателя 1 на вторую планетарную зубчатую передачу 20 посредством зацепления любой из первой муфты и второй муфты. Дополнительно, в механизме передачи мощности, вращение выходного элемента ограничивается посредством зацепления первой муфты и второй муфты между собой. Дополнительно, механизм передачи мощности переходит в состояние нейтрали, не допускающее передачу мощности между двигателем 1 и второй планетарной зубчатой передачей 20, посредством совместного расцепления первой муфты и второй муфты.
В качестве такой конструкции, предусмотрена конструкция, которая включает в себя, например, входную шестерню, которая соединяется с элементом входного вала второй планетарной зубчатой передачи 20, и первую шестерню и вторую шестерню, которые зацепляются с этой входной шестерней, соответственно. Первая шестерня соединяется с двигателем 1 через первую муфту, а вторая шестерня соединяется с двигателем 1 через вторую муфту. Дополнительно, числа зубьев первой шестерни и второй шестерни отличаются друг от друга. Первый передаточный блок включает в себя первую шестерню, первую муфту и входную шестерню. Второй передаточный блок включает в себя вторую шестерню, вторую муфту и входную шестерню. Когда первая муфта зацепляется, вращение двигателя 1 передается на вторую планетарную зубчатую передачу 20 при передаточном отношении трансмиссии, соответствующем передаточному отношению между первой шестерней и входной шестерней, посредством первого передаточного блока. Когда вторая муфта зацепляется, вращение двигателя 1 передается на вторую планетарную зубчатую передачу 20 при передаточном отношении трансмиссии, соответствующем передаточному отношению между второй шестерней и входной шестерней, посредством второго передаточного блока. Дополнительно, если первая муфта и вторая муфта зацепляются между собой, вращение входной шестерни ограничивается вследствие разности передаточного отношения между первым передаточным блоком и вторым передаточным блоком. Между тем, первый передаточный блок и второй передаточный блок дополнительно могут включать в себя зубчатую передачу.
Хотя в настоящем варианте осуществления, двигатель, который должен соединяться с первой планетарной зубчатой передачей 10, представляет собой двигатель 1, вместо этого, другой известный двигатель может соединяться с первой планетарной зубчатой передачей 10.
Первая модификация варианта осуществления изобретения
Ниже описывается первая модификация варианта осуществления. Фиг. 11 является принципиальной схемой транспортного средства 100 согласно первой модификации. Аспекты устройства приведения в движение для гибридного транспортного средства 1-2 настоящей модификации, отличные от устройства приведения в движение для гибридного транспортного средства 1-1 вышеописанного варианта осуществления, заключаются в том, что первая планетарная зубчатая передача 40 основана на изменении скорости понижающей передачи, а также связаны с компоновкой муфты CL1 и тормоза BK1.
Конструкция первой планетарной зубчатой передачи 40 может представлять собой конструкцию, идентичную конструкции первой планетарной зубчатой передачи 10 вышеописанного варианта осуществления. Первая планетарная зубчатая передача 40 включает в себя первую солнечную шестерню 41, первую планетарную шестерню 42, первую коронную шестерню 43 и первое водило 44. Как показано на Фиг. 11, входной вал 2 соединяется с первой коронной шестерней 43 первой планетарной зубчатой передачи 40. Дополнительно, первое водило 44 первой планетарной зубчатой передачи 40 соединяется со вторым водилом 24. Иными словами, в настоящей модификации элемент входного вала первой планетарной зубчатой передачи 40 представляет собой первую коронную шестерню 43, и ее элемент выходного вала представляет собой первое водило 44.
Муфта CL1 может соединять первую солнечную шестерню 41 с первым водилом 44, аналогично вышеописанному варианту осуществления. Дополнительно, тормоз BK1 может ограничивать вращение первой солнечной шестерни 41, аналогично вышеописанному варианту осуществления. В настоящей модификации, муфта CL1 и тормоз BK1 размещаются между первой планетарной зубчатой передачей 40 и второй планетарной зубчатой передачей 20. Согласно настоящей модификации, коаксиально с двигателем первая планетарная зубчатая передача 40, муфта CL1, тормоз BK1, ведущая шестерня 25 привода промежуточного вала, вторая планетарная зубчатая передача 20 и первая вращающаяся электрическая машина MG1 размещаются в таком порядке со стороны двигателя 1.
Первая планетарная зубчатая передача 40 может уменьшать вращение двигателя 1 и вывод из первого водила 44. Если тормоз BK1 зацепляется, а муфта CL1 расцепляется, возникает состояние понижающей передачи, в котором частота вращения первого водила 44 в качестве выходного элемента ниже частоты вращения первой коронной шестерни 43 в качестве элемента входного вала. Передаточное отношение трансмиссии первой планетарной зубчатой передачи 40 в это время может составлять, например, 1,4. С другой стороны, если муфта CL1 зацепляется, в то время как тормоз BK1 расцепляется, частота вращения первой коронной шестерни 43 становится равной частоте вращения первого водила 44.
Таким образом, в устройстве приведения в движение для гибридного транспортного средства 1-2 настоящей модификации, когда выбирается HV-режим диапазона низких скоростей, тормоз BK1 зацепляется, а муфта CL1 расцепляется. Когда выбирается HV-режим диапазона высоких скоростей, муфта CL1 зацепляется, а тормоз BK1 расцепляется.
В устройстве приведения в движение для гибридного транспортного средства 1-2 настоящей модификации, в отличие от вышеописанного варианта осуществления, второе передаточное отношение g2 трансмиссии для механической трансмиссии переключается на передаточное отношение трансмиссии на стороне низшей передачи относительно первого передаточного отношения g1 трансмиссии для механической трансмиссии. Между тем, как первое передаточное отношение g1 трансмиссии для механической трансмиссии, так и второе передаточное отношение g2 трансмиссии для механической трансмиссии являются передаточными отношениями трансмиссии на стороне высшей передачи относительно передаточного отношения трансмиссии 1, которое является общим для вышеописанного варианта осуществления.
Вторая модификация варианта осуществления изобретения
Ниже описывается вторая модификация варианта осуществления. Хотя устройства приведения в движение для гибридного транспортного средства 1-1, 1-2 вышеописанного варианта осуществления и первой модификации имеют многоосный тип, вместо этого, они могут иметь одноосный тип. Фиг. 12 является принципиальной схемой транспортного средства 100 согласно настоящей модификации.
Как показано на Фиг. 12, устройство приведения в движение для гибридного транспортного средства 1-3 настоящей модификации имеет одноосный тип, в котором двигатель 1, первая планетарная зубчатая передача 10, первая вращающаяся электрическая машина MG1, вторая планетарная зубчатая передача 80 и вторая вращающаяся электрическая машина MG2 размещаются коаксиально. Тормоз BK1, муфта CL1, первая планетарная зубчатая передача 10, первая вращающаяся электрическая машина MG1, вторая планетарная зубчатая передача 80 и вторая вращающаяся электрическая машина MG2 размещаются в таком порядке со стороны двигателя 1.
Конструкция передаточного механизма может быть идентичной конструкции передаточного механизма устройства приведения в движение для гибридного транспортного средства 1-1 вышеописанного варианта осуществления. Вращательный вал 33 первой вращающейся электрической машины MG1 является полым, и соединительный вал 85 вставляется в него. Соединительный вал 85 соединяет первую коронную шестерню 13 со вторым водилом 84. Вторая планетарная зубчатая передача 80 включает в себя вторую солнечную шестерню 81, вторую планетарную шестерню 82, вторую коронную шестерню 83 и второе водило 84 и может быть изготовлена с конструкцией, идентичной конструкции второй планетарной зубчатой передачи 20 вышеописанного варианта осуществления.
Вторая коронная шестерня 83 соединяется с вращательным валом 34 второй вращающейся электрической машины MG2. Вращательный вал 34 является карданным валом. Противоположная сторона по отношению к стороне второй коронной шестерни 83 вращательного вала 34 соединяется с ведущими колесами через дифференциальный механизм и ведущий вал (не показан). Устройство приведения в движение для гибридного транспортного средства 1-3 настоящей модификации может применяться, например, к типу на основе FR (заднего привода с передним расположением двигателя).
Третья модификация варианта осуществления изобретения
Ниже описывается третья модификация варианта осуществления. Устройство приведения в движение для гибридного транспортного средства 1-4 настоящей модификации имеет одноосный тип, который может применяться к транспортному FF-средству и транспортному RR-средству. Фиг. 13 является принципиальной схемой транспортного средства 100 согласно настоящей модификации.
Как показано на Фиг. 13, устройство приведения в движение для гибридного транспортного средства 1-4 настоящей модификации имеет одноосный тип, в котором двигатель 1, первая планетарная зубчатая передача 10, вторая планетарная зубчатая передача 20, третья планетарная зубчатая передача 90, первая вращающаяся электрическая машина MG1 и вторая вращающаяся электрическая машина MG2 размещаются коаксиально. Тормоз BK1, муфта CL1, первая планетарная зубчатая передача 10, ведущая шестерня 25 привода промежуточного вала, вторая планетарная зубчатая передача 20, третья планетарная зубчатая передача 90, вторая вращающаяся электрическая машина MG2 и первая вращающаяся электрическая машина MG1 размещаются в таком порядке со стороны двигателя 1.
Конструкция передаточного механизма может быть идентичной конструкции передаточного механизма устройства приведения в движение для гибридного транспортного средства 1-1 вышеописанного варианта осуществления. Третья планетарная зубчатая передача 90 представляет собой тип с одинарными планетарными шестернями, который включает в себя третью солнечную шестерню 91, третью планетарную шестерню 92 и третью коронную шестерню 93. Водило, которое поддерживает третью планетарную шестерню 92, устанавливается стационарно таким образом, что оно не является вращающимся. Третья коронная шестерня 93 соединяется со второй коронной шестерней 23 и ведущей шестерней 25 привода промежуточного вала. Третья солнечная шестерня 91 соединяется с вращательным валом 34 второй вращающейся электрической машины MG2. Третья планетарная зубчатая передача 90 может замедлять вращение второй вращающейся электрической машины MG2 и выходить из третьей коронной шестерни 93.
Четвертая модификация варианта осуществления изобретения
Хотя в вышеописанном варианте осуществления и в соответствующих модификациях, первые планетарные зубчатые передачи 10, 40 и вторые планетарные зубчатые передачи 20, 80 представляют собой тип с одинарными планетарными шестернями, настоящее изобретение не ограничено этим примером. Например, по меньшей мере, любая из первых планетарных зубчатых передач 10, 40 и вторых планетарных зубчатых передач 20, 80 может представлять собой тип с двойными планетарными шестернями. Например, первые планетарные зубчатые передачи 10, 40 могут быть сконструированы в планетарной зубчатой передаче с двойными планетарными шестернями. В этом случае, на соответствующих номограммах, позиция первой коронной шестерни 13, 43 меняется местами с позицией первого водила 14, 44. Для типа с одинарными планетарными шестернями и типа с двойными планетарными шестернями, изменяются на противоположное повышающая передача и понижающая передача передаточного механизма.
Согласно вышеописанному варианту осуществления и соответствующим модификациям, раскрыто устройство приведения в движение, которое включает в себя двигатель, передаточный механизм и блок дифференциального механизма, в котором выходной вал двигателя соединяется с входным валом передаточного механизма, первый элемент блока дифференциального механизма соединяется с выходным валом передаточного механизма, первая вращающаяся машина (электрическая машина) соединяется со вторым элементом, вторая вращающаяся машина (электрическая машина) соединяется с третьим элементом, и частота вращения двигателя может задаваться фиксированно равной нулю посредством зацепления элементов передаточного механизма.
Содержание, раскрытое в вышеописанном варианте осуществления и в соответствующих модификациях, может комбинироваться надлежащим образом для осуществления.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ПОЗИЦИЙ
1-1, 1-2, 1-3 - устройство приведения в движение для гибридного транспортного средства
1 - двигатель
10, 40 - первая планетарная зубчатая передача
13, 43 - первая коронная шестерня
14, 44 - первое водило
20, 80 - вторая планетарная зубчатая передача
21, 81 - вторая солнечная шестерня
23, 83 - вторая коронная шестерня
24, 84 - второе водило
32 - ведущее колесо
50 - HV ECU
60 - MG ECU
70 - ECU двигателя
100 - транспортное средство
BK1 - тормоз
CL1 - муфта
MG1 - первая вращающаяся электрическая машина
MG2 - вторая вращающаяся электрическая машина
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖУЩЕЙ СИЛОЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2694387C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2698607C1 |
| Устройство управления для транспортного средства с электрическим приводом | 2016 |
|
RU2655575C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА ПЕРЕДАЧИ ДИНАМИЧЕСКОЙ МОЩНОСТИ | 2016 |
|
RU2625813C1 |
| СИСТЕМА ПЕРЕДАЧИ МОЩНОСТИ | 2017 |
|
RU2651953C1 |
| Модуль привода для гибридного транспортного средства | 2018 |
|
RU2683136C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2667117C2 |
| ГИБРИДНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2016 |
|
RU2644833C1 |
| СИСТЕМА ПРИВОДА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2572978C1 |
| КОНТРОЛЛЕР ДЛЯ АВТОМОБИЛЯ И СПОСОБ УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2017 |
|
RU2673323C1 |











Изобретение относится области приведения в движение ТС. Устройство приведения в движение для гибридного транспортного средства содержит: механизм передачи мощности, соединенный с двигателем; дифференциальный механизм, соединяющий механизм передачи мощности с ведущими колесами, и устройство переключения скорости механизма передачи мощности. Дифференциальный механизм содержит: первый вращательный элемент, соединенный с элементом механизма передачи мощности; второй вращательный элемент, соединенный с первой электрической машиной; третий вращательный элемент, соединенный со второй электрической машиной и ведущими колесами. Вращение выходного элемента механизма передачи мощности ограничено посредством переключающего устройства. Устройство приведения в движение имеет режим ограничения вращения выходного элемента и движения с помощью первой электрической машины и второй электрической машины. Механизм передачи мощности ускоряет и выводит вращение двигателя. Упрощается конструкция. 4 н. и 5 з.п. ф-лы, 13 ил.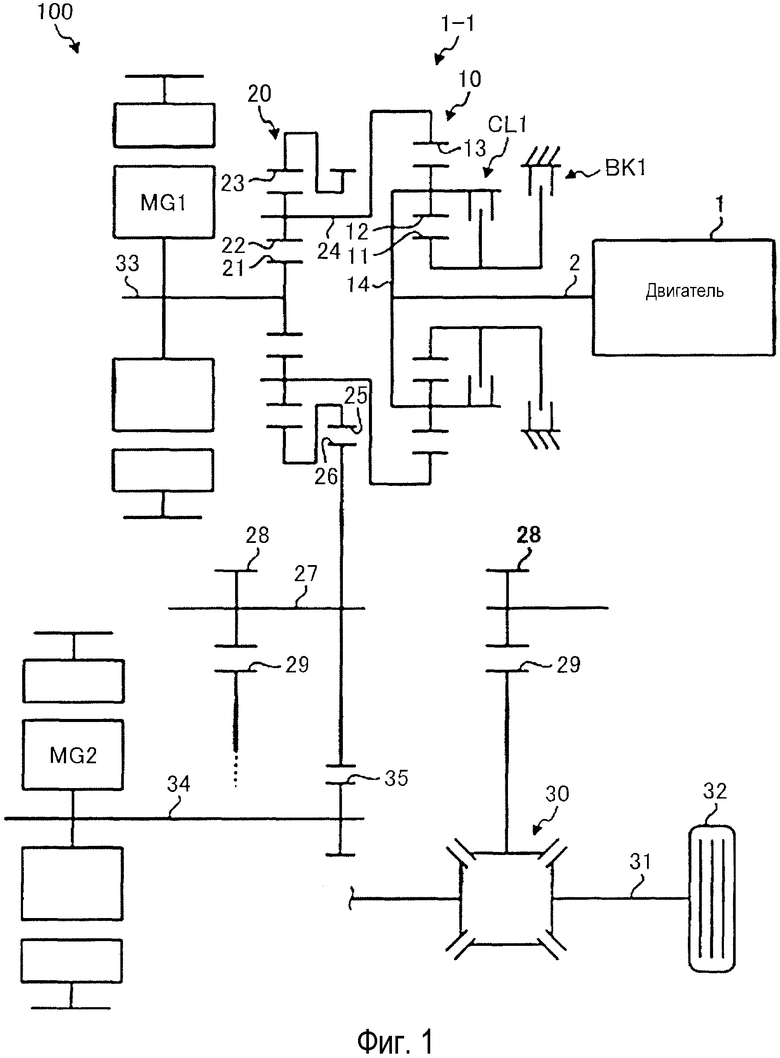
1. Устройство приведения в движение для гибридного транспортного средства, содержащее:
механизм передачи мощности, который соединен с двигателем и передает вращение двигателя;
дифференциальный механизм, который соединяет механизм передачи мощности с ведущими колесами; и
переключающее устройство, которое выполняет переключение скорости механизма передачи мощности,
при этом дифференциальный механизм включает в себя первый вращательный элемент, который соединен с выходным элементом механизма передачи мощности, второй вращательный элемент, который соединен с первой вращающейся электрической машиной, и третий вращательный элемент, который соединен со второй вращающейся электрической машиной и ведущими колесами,
причем вращение выходного элемента механизма передачи мощности ограничено посредством переключающего устройства,
при этом устройство приведения в движение имеет режим ограничения вращения выходного элемента механизма передачи мощности посредством переключающего устройства и движения с помощью первой вращающейся электрической машины и второй вращающейся электрической машины, используемых в качестве источников мощности,
причем механизм передачи мощности может ускорять и выводить вращение двигателя.
2. Устройство по п. 1, в котором механизм передачи мощности может дополнительно замедлять и выводить вращение двигателя.
3. Устройство по п. 1 или 2, в котором механизм передачи мощности представляет собой дифференциальный механизм, а переключающее устройство выполняет переключение скорости механизма передачи мощности посредством переключения между состоянием ограничения дифференциального результирующего движения механизма передачи мощности и состоянием разрешения дифференциального результирующего движения механизма передачи мощности.
4. Устройство по п. 1, в котором переключение скорости в механизме передачи мощности и переключение скорости в дифференциальном механизме выполняются одновременно.
5. Устройство по п. 4, в котором когда переключение скорости в механизме передачи мощности и переключение скорости в дифференциальном механизме выполняются одновременно, передаточное отношение трансмиссии одного из механизма передачи мощности и дифференциального механизма увеличивается, тогда как передаточное отношение трансмиссии другого снижается.
6. Устройство по п. 1, в котором механизм передачи мощности представляет собой дифференциальный механизм, а переключающее устройство включает в себя муфту, допускающую соединение вращательных элементов механизма передачи мощности, и тормоз, который ограничивает вращение вращательных элементов механизма передачи мощности.
7. Устройство приведения в движение для гибридного транспортного средства, содержащее:
механизм передачи мощности, который соединен с двигателем и передает вращение двигателя;
дифференциальный механизм, который соединяет механизм передачи мощности с ведущими колесами; и
переключающее устройство, которое выполняет переключение скорости механизма передачи мощности,
при этом дифференциальный механизм включает в себя первый вращательный элемент, который соединен с выходным элементом механизма передачи мощности, второй вращательный элемент, который соединен с первой вращающейся электрической машиной, и третий вращательный элемент, который соединен со второй вращающейся электрической машиной и ведущими колесами,
причем вращение выходного элемента механизма передачи мощности ограничено посредством переключающего устройства,
при этом устройство приведения в движение имеет режим ограничения вращения выходного элемента механизма передачи мощности посредством переключающего устройства и движения с помощью первой вращающейся электрической машины и второй вращающейся электрической машины, используемых в качестве источников мощности;
причем механизм передачи мощности представляет собой дифференциальный механизм, а переключающее устройство выполняет переключение скорости механизма передачи мощности посредством переключения между состоянием ограничения дифференциального результирующего движения механизма передачи мощности и состоянием разрешения дифференциального результирующего движения механизма передачи мощности.
8. Устройство приведения в движение для гибридного транспортного средства, содержащее:
механизм передачи мощности, который соединен с двигателем и передает вращение двигателя;
дифференциальный механизм, который соединяет механизм передачи мощности с ведущими колесами; и
переключающее устройство, которое выполняет переключение скорости механизма передачи мощности,
при этом дифференциальный механизм включает в себя первый вращательный элемент, который соединен с выходным элементом механизма передачи мощности, второй вращательный элемент, который соединен с первой вращающейся электрической машиной, и третий вращательный элемент, который соединен со второй вращающейся электрической машиной и ведущими колесами,
причем вращение выходного элемента механизма передачи мощности ограничено посредством переключающего устройства,
при этом устройство приведения в движение имеет режим ограничения вращения выходного элемента механизма передачи мощности посредством переключающего устройства и движения с помощью первой вращающейся электрической машины и второй вращающейся электрической машины, используемых в качестве источников мощности,
причем переключение скорости в механизме передачи мощности и переключение скорости в дифференциальном механизме выполняются одновременно, и когда переключение скорости в механизме передачи мощности и переключение скорости в дифференциальном механизме выполняются одновременно, передаточное отношение трансмиссии одного из механизма передачи мощности и дифференциального механизма увеличивается, тогда как передаточное отношение трансмиссии другого снижается.
9. Устройство приведения в движение для гибридного транспортного средства, содержащее:
механизм передачи мощности, который соединен с двигателем и передает вращение двигателя;
дифференциальный механизм, который соединяет механизм передачи мощности с ведущими колесами; и
переключающее устройство, которое выполняет переключение скорости механизма передачи мощности,
при этом дифференциальный механизм включает в себя первый вращательный элемент, который соединен с выходным элементом механизма передачи мощности, второй вращательный элемент, который соединен с первой вращающейся электрической машиной, и третий вращательный элемент, который соединен со второй вращающейся электрической машиной и ведущими колесами,
причем вращение выходного элемента механизма передачи мощности ограничено посредством переключающего устройства,
при этом устройство приведения в движение имеет режим ограничения вращения выходного элемента механизма передачи мощности посредством переключающего устройства и движения с помощью первой вращающейся электрической машины и второй вращающейся электрической машины, используемых в качестве источников мощности,
причем механизм передачи мощности представляет собой дифференциальный механизм, а переключающее устройство включает в себя муфту, выполненную с возможностью соединения вращательных элементов механизма передачи мощности, и тормоз, который ограничивает вращение вращательных элементов механизма передачи мощности.
| US 2011034282 A1, 10.02.2011 | |||
| JP 2009190694 A, 27.08.2009 | |||
| JP 2008265600 A, 06.11.2008 | |||
| JP 2008195303 A, 28.08.2008 | |||
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ, ТРАНСПОРТНОЕ СРЕДСТВО, ВКЛЮЧАЮЩЕЕ В СЕБЯ СИСТЕМУ ЭЛЕКТРОПИТАНИЯ, И СПОСОБ УПРАВЛЕНИЯ СИСТЕМОЙ ЭЛЕКТРОПИТАНИЯ | 2007 |
|
RU2408128C1 |

