Перекрестные ссылки на родственные заявки
[0001] Настоящее изобретение имеет приоритет первой заявки на патент Японии № 2017-218612, поданной 13 ноября 2017 года в Патентное бюро Японии.
[0002] Область техники
[0003] Варианты осуществления настоящего раскрытия сущности относятся к области техники системы управления движущей силой для транспортного средства, в которой множество рабочих режимов могут задаваться посредством манипулирования зацепляющими устройствами.
[0004] Уровень техники
[0005] В публикации JP 2017-007437 А описан модуль привода для гибридного транспортного средства, имеющего механизм деления мощности. Механизм деления мощности, изученный посредством JP 2017-007437 А, содержит первый планетарный зубчатый механизм и второй планетарный зубчатый механизм. В первом планетарном зубчатом механизме, водило соединяется с двигателем, и солнечная шестерня соединяется с первым электромотором. Во втором планетарном зубчатом механизме, водило соединяется с коронной шестерней первого планетарного зубчатого механизма, и коронная шестерня соединяется с ведущими колесами. Водило первого планетарного зубчатого механизма и солнечная шестерня второго планетарного зубчатого механизма избирательно соединяются через первую муфту, и водило и коронная шестерня второго планетарного зубчатого механизма избирательно соединяются через вторую муфту. В механизме деления мощности, режим пониженной передачи, в котором коэффициент мощности, доставляемой в сторону выходного вала, является относительно большим, устанавливается посредством зацепления второй муфты, и режим повышенной передачи, в котором коэффициент мощности, доставляемой в сторону выходного вала, является относительно небольшим, устанавливается посредством зацепления первой муфты, фиксированный (неизменяющийся) режим, в котором крутящий момент двигателя доставляется на ведущие колеса без изменения, устанавливается посредством зацепления как первой муфты, так и второй муфты, и режим нейтрали, в котором прерывается передача крутящего момента между двигателем и ведущими колесами, устанавливается посредством расцепления как первой муфты, так и второй муфты.
[0006] В механизме деления мощности, изученном посредством JP 2017-007437 A, нормально разомкнутая муфта с гидравлическим приводом может использоваться в качестве первой и второй муфт. Этот вид муфты расцепляется, когда гидравлическое давление не может прикладываться к ней, даже если команда зацепления передается в нее. Например, если первая муфта расцепляется непреднамеренно во время тяги в режиме повышенной передачи вследствие падения давления, рабочий режим должен переключаться в режим нейтрали при возникновении толчка.
Сущность изобретения
[0007] Аспекты вариантов осуществления настоящего раскрытия сущности задуманы с учетом вышеприведенных технических проблем, и в силу этого цель настоящего раскрытия сущности заключается в том, чтобы предоставлять систему управления для транспортных средств, выполненную с возможностью предотвращать непреднамеренную смену режима, даже когда сигнал команды управления не может передаваться, чтобы манипулировать зацепляющими устройствами.
[0008] Система управления движущей силой согласно варианту осуществления настоящего раскрытия сущности применяется к транспортному средству, содержащему: двигатель; вращающуюся машину; и дифференциальный механизм, который выполнен с возможностью выполнять дифференциальное вращение между первым вращающимся компонентом, соединенным с двигателем, вторым вращающимся компонентом, соединенным с вращающейся машиной, и третьим вращающимся компонентом, соединенным с выходным компонентом. Дифференциальный механизм содержит множество вращающихся элементов. Чтобы достигать вышеописанной цели, система управления движущей силой содержит: первое зацепляющее устройство, которое соединяет первый вращающийся элемент и второй вращающийся элемент или первый реактивный элемент и стационарный компонент; и второе зацепляющее устройство, которое соединяет третий вращающийся элемент и четвертый вращающийся элемент или второй реактивный элемент и стационарный компонент. Согласно варианту осуществления, сохраняющая состояние муфта используется в качестве, по меньшей мере, одного из первого зацепляющего устройства и второго зацепляющего устройства, и сохраняющая состояние муфта выполнена с возможностью зацепляться при приеме сигнала команды управления зацеплением и расцепляться при приеме сигнала команды управления расцеплением и поддерживать текущее состояние зацепления, когда передача сигналов в сохраняющую состояние муфту прекращается.
[0009] В неограничивающем варианте осуществления, дифференциальный механизм может быть выполнен с возможностью устанавливать: первый рабочий режим, в котором крутящий момент двигателя доставляется в выходной компонент с первым заданным отношением посредством зацепления любого из первого зацепляющего устройства и второго зацепляющего устройства; и второй рабочий режим, в котором крутящий момент двигателя (5) доставляется в выходной компонент со вторым заданным отношением, которое меньше первого заданного отношения, посредством зацепления другого из первого зацепляющего устройства и второго зацепляющего устройства.
[0010] В неограничивающем варианте осуществления, дифференциальный механизм может быть выполнен с возможностью устанавливать: фиксированный режим, в котором отношение частот вращения между двигателем и выходным компонентом является постоянным посредством зацепления первого зацепляющего устройства и второго зацепляющего устройства; и бесступенчатый режим, в котором отношение частот вращения между двигателем и выходным компонентом варьируется непрерывно посредством зацепления любого из первого зацепляющего устройства и второго зацепляющего устройства.
[0011] В неограничивающем варианте осуществления, третий вращающийся элемент может включать в себя любой из первого вращающегося элемента и второго вращающегося элемента.
[0012] В неограничивающем варианте осуществления, четвертый вращающийся элемент может включать в себя вращающиеся элементы, отличные от первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента.
[0013] В неограничивающем варианте осуществления, второй реактивный элемент может включать в себя вращающиеся элементы, отличные от первого реактивного элемента.
[0014] В неограничивающем варианте осуществления, сохраняющая состояние муфта может использоваться в качестве как первого зацепляющего устройства, так и второго зацепляющего устройства.
[0015] В неограничивающем варианте осуществления, нормально разомкнутая муфта может использоваться в качестве другого из первого зацепляющего устройства и второго зацепляющего устройства. В частности, нормально разомкнутая муфта может быть выполнена с возможностью зацепляться при приеме сигнала команды управления зацеплением и расцепляться, когда передача сигналов в нормально разомкнутую муфту прекращается.
[0016] В неограничивающем варианте осуществления, система управления движущей силой дополнительно может содержать первичный движитель, который доставляет выходной крутящий момент в выходной компонент без прохождения через дифференциальный механизм.
[0017] В неограничивающем варианте осуществления, нормально замкнутая муфта может использоваться в качестве другого из первого зацепляющего устройства и второго зацепляющего устройства. В частности, нормально замкнутая муфта может быть выполнена с возможностью расцепляться при приеме сигнала команды управления расцеплением и зацепляться, когда передача сигналов в нормально замкнутую муфту прекращается.
[0018] В неограничивающем варианте осуществления, сохраняющая состояние муфта может включать в себя кулачковую муфту, содержащую: пару вращающихся компонентов, располагающихся напротив друг друга, при обеспечении возможности вращаться относительно друг друга; стержень, который подталкивает и извлекает один из вращающихся компонентов в направлении к/от другого вращающегося компонента при приеме сигнала команды управления зацеплением или сигнала команды управления расцеплением; и пружину сжатия, которая передает нагрузку стержня в упомянутый один из вращающихся компонентов.
[0019] В неограничивающем варианте осуществления, система управления движущей силой дополнительно может содержать контроллер, который управляет первым зацепляющим устройством и вторым зацепляющим устройством. В частности, контроллер может быть выполнен с возможностью: определять зацепляющее устройство, в котором возникает неисправность, из первого зацепляющего устройства и второго зацепляющего устройства; определять то, зацеплено или расцеплено зацепляющее устройство, в котором возникает неисправность; расцеплять зацепляющее устройство, работающее надлежащим образом, если зацепляющее устройство, в котором возникает неисправность, зацеплено; и зацеплять зацепляющее устройство, работающее надлежащим образом, если зацепляющее устройство, в котором возникает неисправность, расцеплено.
[0020] Таким образом, система управления движущей силой согласно варианту осуществления настоящего раскрытия сущности содержит два зацепляющих устройства, чтобы соединять любые два из вращающихся элементов дифференциального механизма либо соединять любой из вращающихся элементов со стационарным компонентом. В системе управления движущей силой, сохраняющая состояние муфта используется в качестве, по меньшей мере, одного из зацепляющего устройства. Таким образом, если передача сигналов в сохраняющую состояние муфту прекращается вследствие неисправности во время тяги при зацеплении другого зацепляющего устройства, текущее состояние зацепления сохраняющей состояние муфты поддерживается. В силу этого, согласно варианту осуществления, рабочий режим транспортного средства не будет непреднамеренно переключаться вследствие неисправности. По этой причине, коэффициент усиления крутящего момента для крутящего момента, доставленного от двигателя в выходной компонент, не будет изменяться в случае неисправности зацепляющего устройства, и в силу этого толчок, получающийся в результате неисправности муфты, может уменьшаться.
Краткое описание чертежей
[0021] Признаки, аспекты и преимущества примерных вариантов осуществления настоящего раскрытия сущности должны лучше пониматься со ссылкой на нижеприведенное описание и прилагаемые чертежи, которые не должны ограничивать изобретение каким-либо образом.
[0022] Фиг. 1 является принципиальной схемой, показывающей один пример первого модуля привода;
[0023] Фиг. 2 является принципиальной схемой, показывающей один пример второго модуля привода;
[0024] Фиг. 3 является блок-схемой, показывающей структуру электронного модуля управления;
[0025] Фиг. 4 является таблицей, показывающей состояния зацепления зацепляющих устройств и рабочие условия первичных движителей в каждом рабочем режиме;
[0026] Фиг. 5 является номографической схемой, показывающей ситуацию в HV-Hi-режиме;
[0027] Фиг. 6 является номографической схемой, показывающей ситуацию в HV-Lo-режиме;
[0028] Фиг. 7 является номографической схемой, показывающей ситуацию в фиксированном режиме;
[0029] Фиг. 8 является номографической схемой, показывающей ситуацию в EV-Lo-режиме;
[0030] Фиг. 9 является номографической схемой, показывающей ситуацию в EV-Hi-режиме;
[0031] Фиг. 10 является номографической схемой, показывающей ситуацию в одномоторном режиме;
[0032] Фиг. 11 показывает карту для определения рабочего режима во время тяги в CS-режиме;
[0033] Фиг. 12 показывает карту для определения рабочего режима во время тяги в CD-режиме;
[0034] Фиг. 13 является схематичной иллюстрацией, показывающей конструкцию сохраняющей состояние муфты;
[0035] Фиг. 14 является блок-схемой последовательности операций способа, показывающей процедуру, выполняемую в HV-Hi-режиме и HV-Lo-режиме;
[0036] Фиг. 15 является блок-схемой последовательности операций способа, показывающей процедуру, выполняемую в фиксированном режиме;
[0037] Фиг. 16 является временной диаграммой, указывающей изменения частот вращения и крутящих моментов двигателя и электромоторов и состояния зацепления второй муфты во время выполнения процедуры, показанной на фиг. 15;
[0038] Фиг. 17 является блок-схемой последовательности операций способа, показывающей процедуру, выполняемую в одномоторном режиме;
[0039] Фиг. 18 является принципиальной схемой, показывающей другой пример конструкции транспортного средства, к которому применяется система управления согласно варианту осуществления;
[0040] Фиг. 19 является номографической схемой, показывающей ситуацию транспортного средства, показанного на фиг. 18, в HV-Hi-режиме;
[0041] Фиг. 20 является номографической схемой, показывающей ситуацию транспортного средства, показанного на фиг. 18, в HV-Lo-режиме;
[0042] Фиг. 21 является принципиальной схемой, показывающей еще один другой пример конструкции транспортного средства, к которому применяется система управления согласно варианту осуществления;
[0043] Фиг. 22 является номографической схемой, показывающей ситуацию транспортного средства, показанного на фиг. 21, в HV-Hi-режиме;
[0044] Фиг. 23 является номографической схемой, показывающей ситуацию транспортного средства, показанного на фиг. 21, в HV-Lo-режиме;
[0045] Фиг. 24 является принципиальной схемой, показывающей пример конструкции транспортного средства, в котором рабочий режим может переключаться между фиксированным режимом и бесступенчатым режимом;
[0046] Фиг. 25 является таблицей, показывающей состояния зацепления зацепляющих устройств и рабочие условия первичных движителей в каждом рабочем режиме транспортного средства, показанного на фиг. 24;
[0047] Фиг. 26 является номографической схемой, показывающей частоты вращения вращающихся элементов трансмиссии и направление крутящих моментов двигателя и электромоторов в первом режиме;
[0048] Фиг. 27 является номографической схемой, показывающей частоты вращения вращающихся элементов трансмиссии и направление крутящих моментов двигателя и электромоторов во втором режиме;
[0049] Фиг. 28 является номографической схемой, показывающей частоты вращения вращающихся элементов трансмиссии и направление крутящих моментов двигателя и электромоторов в третьем режиме;
[0050] Фиг. 29 является номографической схемой, показывающей частоты вращения вращающихся элементов трансмиссии и направление крутящих моментов двигателя и электромоторов в четвертом режиме;
[0051] Фиг. 30 является номографической схемой, показывающей частоты вращения вращающихся элементов трансмиссии и направление крутящих моментов двигателя и электромоторов в пятом режиме; и
[0052] Фиг. 31 является номографической схемой, показывающей частоты вращения вращающихся элементов трансмиссии и направление крутящих моментов двигателя и электромоторов в шестом режиме.
Подробное описание предпочтительных вариантов осуществления
[0053] Ниже поясняются предпочтительные варианты осуществления настоящего раскрытия сущности со ссылкой на прилагаемые чертежи. Ссылаясь теперь на фиг. 1 и 2, показан первый вариант осуществления гибридного транспортного средства (в дальнейшем называется просто "транспортным средством") согласно настоящему раскрытию сущности. В частности, фиг. 1 показывает первый модуль 2 привода, который приводит в действие пару передних колес 1R и 1L, и фиг. 2 показывает второй модуль 4 привода, который приводит в действие пару задних колес 3R и 3L. Транспортное средство содержит двигатель 5, первый электромотор 6 (на чертежах сокращенно "MG1") и второй электромотор 7 (на чертежах сокращенно "MG2"). В частности, первый электромотор 6 представляет собой электромотор-генератор, имеющий функцию генерирования мощности. В транспортном средстве согласно первому варианту осуществления, частота вращения двигателя 5 управляется посредством первого электромотора 6, и второй электромотор 7 приводится в действие посредством электрической мощности, вырабатываемой посредством первого электромотора 6, чтобы формировать движущую силу для приведения в движение транспортного средства. Необязательно, второй электромотор 7 также может использоваться в качестве электромотора-генератора, имеющего функцию генерирования мощности. В транспортном средстве, соответственно, первый электромотор 6 служит в качестве первой вращающейся машины, и второй электромотор 7 служит в качестве первичного движителя.
[0054] Механизм 8 деления мощности в качестве дифференциального механизма соединяется с двигателем 5. Механизм 8 деления мощности включает в себя секцию 9 деления мощности, которая распределяет крутящий момент двигателя в сторону первого электромотора и в сторону выходного вала, и трансмиссионную секцию 10, которая изменяет коэффициент деления крутящего момента.
[0055] Например, планетарный зубчатый механизм односателлитного типа, выполненный с возможностью выполнять дифференциальное действие между тремя вращающимися элементами, может использоваться в качестве секции 9 деления мощности. В частности, секция 9 деления мощности содержит: солнечную шестерню 11; коронную шестерню 12 в качестве шестерни внутреннего зацепления, размещаемой концентрически с солнечной шестерней 11; сателлитные шестерни 13, размещенные между солнечной шестерней 11 и коронной шестерней 12 при введении в зацепление с обеими шестернями 11 и 12; и водило 14, поддерживающее сателлитные шестерни 13 вращающимся способом. В секции 9 деления мощности, соответственно, солнечная шестерня 11 служит главным образом в качестве реактивного элемента, коронная шестерня 12 служит главным образом в качестве выходного элемента, и водило 14 служит главным образом в качестве входного элемента.
[0056] Выходной вал 15 двигателя 5 соединяется с входным валом 16 механизма 8 деления мощности, соединенного с водилом 14 таким образом, что мощность двигателя 5 прикладывается к водилу 14. Необязательно, дополнительный зубчатый механизм может размещаться между входным валом 16 и водилом 14, и демпфирующее устройство и преобразователь крутящего момента могут размещаться между выходным валом 15 и входным валом 16.
[0057] Солнечная шестерня 11 соединяется с первым электромотором 6. В варианте осуществления, показанном на фиг. 1, секция 9 деления мощности и первый электромотор 6 размещаются концентрически с осью центра вращения двигателя 5, и первый электромотор 6 расположен на противоположной стороне двигателя 5 через секцию 9 деления мощности. Трансмиссионная секция 10 размещается коаксиально между секцией 9 деления мощности и двигателем 5.
[0058] В частности, трансмиссионная секция 10 представляет собой планетарный зубчатый механизм односателлитного типа, содержащий: солнечную шестерню 17; коронную шестерню 18 в качестве шестерни внутреннего зацепления, размещаемой концентрически с солнечной шестерней 17; сателлитные шестерни 19, размещенные между солнечной шестерней 17 и коронной шестерней 18 при введении в зацепление с обеими шестернями 17 и 18; и водило 20, поддерживающее сателлитные шестерни 19 вращающимся способом. Таким образом, трансмиссионная секция 10 также выполнена с возможностью выполнять дифференциальное действие между солнечной шестерней 17, коронной шестерней 18 и водилом 20. В трансмиссионной секции 10, солнечная шестерня 17 соединяется с коронной шестерней 12 секции 9 деления мощности, и коронная шестерня 18 соединяется с выходной шестерней 21.
[0059] Чтобы использовать секцию 9 деления мощности и трансмиссионную секцию 10 в качестве сложного планетарного зубчатого механизма, первая муфта CL1 располагается с возможностью избирательно соединять водило 20 трансмиссионной секции 10 с водилом 14 секции 9 деления мощности. В частности, вращающийся диск 14a садится во входной вал 16, и первая муфта CL1 зацепляет вращающийся диск 14a избирательно с водилом 20 трансмиссионной секции 10. Например, мокрая многодисковая муфта или кулачковая муфта может использоваться в качестве первой муфты CL1. Таким образом, в первом модуле 2 привода, показанном на фиг. 1, секция 9 деления мощности соединяется с трансмиссионной секцией 10, чтобы служить в качестве сложного планетарного зубчатого механизма посредством приведения первой муфты CL1 в зацепление. В таком сформированном сложном планетарном зубчатом механизме, водило 14 секции 9 деления мощности соединяется с водилом 20 трансмиссионной секции 10, чтобы служить в качестве входного элемента, солнечная шестерня 11 секции 9 деления мощности служит в качестве реактивного элемента, и коронная шестерня 18 трансмиссионной секции 10 служит в качестве выходного элемента. Таким образом, сложный планетарный зубчатый механизм имеет такую конфигурацию, в которой входной вал 16, выходной вал 6a первого электромотора 6 и ведомая шестерня 23 могут вращаться дифференциальным способом.
[0060] Вторая муфта CL2 располагается с возможностью вращать вращающиеся элементы трансмиссионной секции 10 как единое целое. Например, фрикционная муфта и кулачковая муфта также могут использоваться в качестве второй муфты CL2, чтобы избирательно соединять водило 20 с коронной шестерней 18 или солнечной шестерней 17 либо соединять солнечную шестерню 17 с коронной шестерней 18. В первом модуле 2 привода, показанном на фиг. 1, в частности, вторая муфта CL2 выполнена с возможностью соединять водило 20 с коронной шестерней 18, чтобы вращать вращающиеся элементы трансмиссионной секции 10 как единое целое. В частности, вращающийся диск 20a предоставляется с возможностью вращаться как единое целое с водилом 20, и вторая муфта CL 2 зацепляет вращающийся диск 20a избирательно с коронной шестерней 18 трансмиссионной секции 10.
[0061] Соответственно, водило 20 трансмиссионной секции 10 служит в качестве первого вращающегося элемента или третьего вращающегося элемента, водило 14 секции 9 деления мощности служит в качестве второго вращающегося элемента, первая муфта CL1 служит в качестве первого зацепляющего устройства, вторая муфта CL 2 служит в качестве второго зацепляющего устройства, входной вал 16 служит в качестве первого вращающегося компонента, выходной вал 6a первого электромотора 6 служит в качестве второго вращающегося компонента, ведомая шестерня 23 служит в качестве третьего вращающегося элемента, и пара передних колес 1R и 1L служит в качестве выходного компонента.
[0062] Первая муфта CL1 и вторая муфта CL2 размещаются коаксиально с двигателем 5, секцией 9 деления мощности и трансмиссионной секцией 10 на противоположной стороне секции 9 деления мощности вдоль трансмиссионной секции 10. Первая муфта CL1 и вторая муфта CL2 могут размещаться не только параллельно между собой в радиальном направлении, но также и совместно в осевом направлении. В первом модуле 2 привода, показанном на фиг. 1, первая муфта CL1 и вторая муфта CL2 размещаются радиально параллельно между собой, и в силу этого осевая длина модуля привода может сокращаться. Помимо этого, поскольку ширина модуля привода не будет увеличиваться посредством муфт CL1 и CL2, число фрикционных дисков фрикционной муфты может уменьшаться.
[0063] Обратный вал 22 идет параллельно общей оси вращения двигателя 5, секции 9 деления мощности и трансмиссионной секции 10. Ведомая шестерня 23 садится в один конец обратного вала 22 с возможностью вводиться в зацепление с выходной шестерней 21, и ведущая шестерня 24 садится в другой конец обратного вала 22 с возможностью вводиться в зацепление с коронной шестерней 26 блока 25 дифференциала в качестве конечной редукторной шестерни. Ведомая шестерня 23 также вводится в зацепление с ведущей шестерней 28, посаженной в вал 27 ротора второго электромотора 7 таким образом, что мощность или крутящий момент второго электромотора 7 объединяется с мощностью или крутящим моментом выходной шестерни 21 в ведомой шестерне 23 с возможностью распределяться из блока 25 дифференциала на передние колеса 1R и 1L через каждый из ведущих валов 29.
[0064] Чтобы избирательно прекращать вращение выходного вала 15 или входного вала 16 для целей доставки движущего крутящего момента, сформированного посредством первого электромотора 6, на передние колеса 1R и 1L, первый тормоз B1 размещается в первом модуле 2 привода. Например, фрикционное зацепляющее устройство или кулачковый тормоз может использоваться в качестве первого тормоза B1. В частности, водилу 14 секции 9 деления мощности и водилу 20 трансмиссионной секции 10 обеспечивается возможность служить в качестве реактивных элементов, и солнечной шестерне 11 секции 9 деления мощности обеспечивается возможность служить в качестве входного элемента посредством применения первого тормоза B1, чтобы останавливать выходной вал 15 или входной вал 16. С этой целью, первый тормоз B1 может быть выполнен с возможностью не только полностью прекращать вращение выходного вала 15 или входного вала 16, но также и не полностью прикладывать реактивный крутящий момент к этим валам. Альтернативно, односторонняя муфта может использоваться вместо первого тормоза B1, чтобы ограничивать обратное вращение выходного вала 15 или входного вала 16.
[0065] Второй модуль 4 привода монтируется на транспортном средстве, чтобы доставлять мощность или крутящий момент заднего электромотора 30 на пару задних колес 3R и 3L. Здесь, следует отметить, что левое заднее колесо 3L не проиллюстрировано на фиг. 2 для иллюстрации. Электромотор-генератор, имеющий функцию выработки, также может использоваться в качестве заднего электромотора 30 (на чертежах сокращенно "MGR"), и задний электромотор 30 соединяется с трансмиссией 31. Ступень зубчатой передачи трансмиссии 31 может выбираться из редукторной ступени, в которой крутящий момент заднего электромотора 30 умножается, и фиксированной ступени, в которой крутящий момент заднего электромотора 30 передается без умножения.
[0066] Как показано на фиг. 2, трансмиссия 31 представляет собой планетарный зубчатый механизм односателлитного типа, содержащий: солнечную шестерню 32; коронную шестерню 33 в качестве шестерни внутреннего зацепления, размещаемой концентрически с солнечной шестерней 32; сателлитные шестерни 34, размещенные между солнечной шестерней 32 и коронной шестерней 33 при введении в зацепление с обеими шестернями 32 и 33; и водило 35, поддерживающее сателлитные шестерни 34 вращающимся способом.
[0067] В трансмиссии 31, солнечная шестерня 32 соединяется с задним электромотором 30, чтобы служить в качестве входного элемента, и водило 35 соединяется с выходным валом 36, чтобы служить в качестве выходного элемента. Чтобы устанавливать фиксированную ступень в трансмиссии 31, третья муфта CL3 размещается во втором модуле 4 привода. Например, фрикционная муфта и кулачковая муфта также могут использоваться в качестве третьей муфты CL3, чтобы избирательно соединять солнечную шестерню 32 с коронной шестерней 33 или водилом 35 либо соединять коронную шестерню 33 с водилом 35. Во втором модуле 4 привода, показанном на фиг. 2, в частности, третья муфта CL3 выполнена с возможностью соединять коронную шестерню 33 с водилом 35, чтобы устанавливать фиксированную ступень в трансмиссии 31.
[0068] Чтобы устанавливать редукторную ступень в трансмиссии 31, второй тормоз B2 размещается во втором модуле 4 привода. Например, фрикционное зацепляющее устройство или кулачковый тормоз также может использоваться в качестве второго тормоза B2. В частности, второй тормоз B2 прекращает вращение коронной шестерни 33 трансмиссии 31 посредством зацепления коронной шестерни 33 со стационарным компонентом, таким как кожух C, удерживающий второй модуль 4 привода таким образом, что коронной шестерне 33 обеспечивается возможность служить в качестве реактивного элемента. С этой целью, второй тормоз B2 может быть выполнен с возможностью прекращать вращение коронной шестерни 33 не только полностью, но также и не полностью.
[0069] Ведущая шестерня 37 садится в выходной вал 36 трансмиссии 31, и обратный вал 38 идет параллельно выходному валу 36. Ведомая шестерня 39 садится в один конец обратного вала 38 с возможностью вводиться в зацепление с ведущей шестерней 37. В частности, ведомая шестерня 39 диаметрально больше ведущей шестерни 37 таким образом, что выходной крутящий момент трансмиссии 31 передается через ведомую шестерню 39 при умножении. Ведущая шестерня 40 садится в другой конец обратного вала 38 с возможностью вводиться в зацепление с коронной шестерней 42 блока 41 дифференциала в качестве конечной редукторной шестерни. Блок 41 дифференциала соединяется с ведущими валами 43, чтобы доставлять мощность заднего электромотора 30 на правое заднее колесо 3R и левое заднее колесо 3L.
[0070] Как показано на фиг. 1 и 2, первая система 44 управления мощностью соединяется с первым электромотором 6, вторая система 45 управления мощностью соединяется со вторым электромотором 7, и третья система 46 управления мощностью соединяется с задним электромотором 30. Каждая из первой системы 44 управления мощностью, второй системы 45 управления мощностью и третьей системы 46 управления мощностью отдельно включает в себя инвертор и преобразователь. Первая система 44 управления мощностью, вторая система 45 управления мощностью и третья система 46 управления мощностью соединяются между собой, а также соединяются отдельно с аккумулятором 47, включающим в себя литий-ионный аккумулятор и конденсатор. Например, когда первый электромотор 6 работает в качестве генератора при установлении реактивного крутящего момента, электрическая мощность, вырабатываемая посредством первого электромотора 6, может подаваться непосредственно во второй электромотор 7 и задний электромотор 30 без прохождения через аккумулятор 47.
[0071] Чтобы управлять первой системой 44 управления мощностью, второй системой 45 управления мощностью, третьей системой 46 управления мощностью, двигателем 5, муфтами CL1, CL2, CL3 и тормозами B1, B2, гибридное транспортное средство содержит электронный модуль управления (в дальнейшем сокращенно "ECU") 48 в качестве контроллера. ECU 48 состоит главным образом из микрокомпьютера, и как показано на фиг. 3, ECU 48 содержит главный ECU 49, ECU 50 электромотора (на чертежах сокращенно "MG ECU"), ECU 51 двигателя и ECU 52 муфты.
[0072] Главный ECU 49 выполнен с возможностью выполнять вычисление на основе принимаемых данных из датчиков, а также карт и формул, установленных заранее, и передает результат вычисления в ECU 50 электромотора, ECU 51 двигателя и ECU 52 муфты в форме сигнала команды управления. Например, как показано на фиг. 3, главный ECU 49 принимает данные относительно: скорости транспортного средства; позиции акселератора; частоты вращения первого электромотора 6; частоты вращения второго электромотора 7; частоты вращения заднего электромотора 30; частоты вращения выходного вала 15 от двигателя 5; частоты вращения выходного вала, к примеру, частоты вращения коронной шестерни 18 трансмиссионной секции 10 или обратного вала 22; ходов поршней муфт CL1, CL2, CL3, тормозов B1 и B2; температуры аккумулятора 47; температур ECU 44, 45 и 46; температуры первого электромотора 6; температуры второго электромотора 7; температуры заднего электромотора 30; температуры масла (т.е. ATF), смазывающего механизм 8 деления мощности и трансмиссию 31; и уровня состояния заряда (в дальнейшем сокращенно "SOC") аккумулятора 47.
[0073] В частности, сигналы команд управления выходных крутящих моментов и частот вращения первого электромотора 6, второго электромотора 7 и заднего электромотора 30 передаются из главного ECU 49 в ECU 50 электромотора. Аналогично, сигналы команд управления выходного крутящего момента и частоты вращения двигателя 5 передаются из главного ECU 49 в ECU 51 двигателя. Дополнительно, сигналы команд управления для перегрузочных способностей по передаче крутящего момента (включающих в себя "0") муфт CL1, CL2, CL3 и тормозов B1, B2 передаются из главного ECU 49 в ECU 52 муфты.
[0074] ECU 50 электромотора вычисляет значения тока, прикладываемого к первому электромотору 6, второму электромотору 7 и заднему электромотору 30, на основе данных, передаваемых из главного ECU 49, и передает результаты вычисления в электромоторы 6, 7 и 30 в форме сигналов команд управления. В гибридном транспортном средстве согласно варианту осуществления, электромотор переменного тока используется отдельно в качестве первого электромотора 6, второго электромотора 7 и заднего электромотора 30. Чтобы управлять электромотором переменного тока, сигнал команды управления, передаваемый из ECU 50 электромотора, включает в себя сигналы команд управления для управления частотой тока, сформированного посредством инвертора, и значением напряжения, повышенным посредством преобразователя.
[0075] ECU 51 двигателя вычисляет значения тока, чтобы управлять степенями открытия электронного дроссельного клапана, клапана EGR (ограничения рециркуляции выхлопных газов), впускного клапана и выпускного клапана и активировать свечу зажигания, на основе данных, передаваемых из главного ECU 49, и передает результаты вычисления в клапаны и в свечу в форме сигналов команд управления. Таким образом, ECU 51 двигателя передает сигналы команд управления для управления мощностью, выходным крутящим моментом и частотой вращения двигателя 5.
[0076] ECU 52 муфты вычисляет значения тока, поданные в актуаторы, управляющие давлениями для зацепления муфт CL1, CL2, CL3 и тормозов B1, B2, на основе данных, передаваемых из главного ECU 49, и передает результаты вычисления в актуаторы в форме сигналов команд управления.
[0077] В гибридном транспортном средстве согласно варианту осуществления, рабочий режим может выбираться из гибридного режима (в дальнейшем сокращенно "HV-режима"), в котором гибридное транспортное средство приводится в движение посредством движущего крутящего момента, сформированного посредством двигателя 5, и режима электротранспортного средства (в дальнейшем сокращенно "EV-режима"), в котором гибридное транспортное средство приводится в движение посредством движущих крутящих моментов, сформированных посредством первого электромотора 6 и второго электромотора 7 без использования двигателя 5. HV-режим может выбираться из гибридного режима пониженной передачи (в дальнейшем сокращенно "HV-Lo-режима"), гибридного режима повышенной передачи (в дальнейшем сокращенно "HV-Hi-режима") и фиксированного режима. В частности, в HV-Lo-режиме, частота вращения двигателя 5 (т.е. частота вращения входного вала 16) увеличивается выше частоты вращения коронной шестерни 18 трансмиссионной секции 10, когда частота вращения первого электромотора 6 уменьшается практически до нуля. В свою очередь, в HV-Hi-режиме, частота вращения двигателя 5 уменьшается ниже частоты вращения коронной шестерни 18 трансмиссионной секции 10, когда частота вращения первого электромотора 6 уменьшается практически до нуля. Дополнительно, в фиксированном режиме, двигатель 5 и коронная шестерня 18 трансмиссионной секции 10 всегда вращаются с практически идентичными частотами вращения.
[0078] EV-режим может выбираться из двухэлектромоторного режима, в котором оба из первого электромотора 6 и второго электромотора 7 формируют движущие крутящие моменты, чтобы приводить в движение гибридное транспортное средство, и одномоторного режима, в котором только второй электромотор 7 формирует движущий крутящий момент, чтобы приводить в движение гибридное транспортное средство. Дополнительно, двухэлектромоторный режим может выбираться из режима пониженной передачи электротранспортного средства (в дальнейшем сокращенно "EV-Lo-режима"), в котором крутящий момент первого электромотора 6 умножается на относительно больший коэффициент, и режима повышенной передачи электротранспортного средства (в дальнейшем сокращенно "EV-Hi-режима"), в котором крутящий момент первого электромотора 6 умножается на относительно меньший коэффициент. В одномоторном режиме, гибридное транспортное средство снабжается мощностью только посредством второго электромотора 7, при зацеплении первой муфты CL1, при зацеплении второй муфты CL2 либо при расцеплении обеих из первой муфты CL1 и второй муфты CL2.
[0079] Фиг. 4 показывает состояния зацепления первой муфты CL1, второй муфты CL2 и первого тормоза B1 и рабочие условия первого электромотора 6, второго электромотора 7 и двигателя 5 в каждом рабочем режиме. На фиг. 4, "•" представляет то, что зацепляющее устройство находится в зацеплении, "-" представляет то, что зацепляющее устройство находится в расцеплении, "G" представляет то, что электромотор служит главным образом в качестве генератора, "M" представляет то, что электромотор служит главным образом в качестве электромотора, пустое поле представляет то, электромотор не служит в качестве ни электромотора, ни генератора, либо то, что электромотор не участвует в себе в тяге гибридного транспортного средства, "Включен" представляет то, что двигатель 5 формирует движущий крутящий момент, и "Выключен" представляет то, что двигатель 5 не формирует движущий крутящий момент.
[0080] Частоты вращения вращающихся элементов механизма 8 деления мощности и направления крутящих моментов двигателя 5, первого электромотора 6 и второго электромотора 7 в каждом рабочем режиме указываются на фиг. 5-10. На номографических схемах, показанных на фиг. 5-10, расстояния между вертикальными линиями представляют передаточное отношение механизма 8 деления мощности, вертикальное расстояние на вертикальной линии от горизонтальной базовой линии представляет частоту вращения вращающегося компонента, ориентация стрелки представляет направление крутящего момента, и длина стрелки представляет абсолютную величину крутящего момента.
[0081] Как указано на фиг. 5, в HV-Hi-режиме, вторая муфта CL2 зацепляется, и двигатель 5 формирует движущий крутящий момент при установлении реактивного крутящего момента посредством первого электромотора 6. Как указано на фиг. 6, в HV-Lo-режиме, первая муфта CL1 зацепляется, и двигатель 5 формирует движущий крутящий момент при установлении реактивного крутящего момента посредством первого электромотора 6. В HV-Hi-режиме и HV-Lo-режиме, частота вращения первого электромотора 6 управляется таким образом, чтобы оптимизировать полную эффективность использования энергии в первом модуле 2 привода, включающую в себя эффективность использования топлива двигателя 5 и эффективность приведения в действие первого электромотора 6. В частности, полная эффективность использования энергии в первом модуле 2 привода может вычисляться посредством деления полного энергопотребления на мощность, чтобы вращать передние колеса 1R и 1L. Частота вращения первого электромотора 6 может варьироваться непрерывно, и частота вращения двигателя 5 регулируется посредством частоты вращения первого электромотора 6 и скорости транспортного средства. Таким образом, механизм 8 деления мощности может служить в качестве бесступенчатой трансмиссии.
[0082] Как результат установления реактивного крутящего момента посредством первого электромотора 6, первый электромотор 6 может служить в качестве генератора. В силу этого, в этой ситуации, мощность двигателя 5 частично преобразуется в электрическую энергию, и оставшаяся мощность двигателя 5 доставляется в коронную шестерню 18 трансмиссионной секции 10. Реактивный крутящий момент, устанавливаемый посредством первого электромотора 6, регулируется посредством коэффициента деления крутящего момента, передаваемого от двигателя 5 в сторону первого электромотора 6 через механизм 8 деления мощности. Такой коэффициент деления между крутящим моментом, доставленным от двигателя 5 в сторону первого электромотора 6 через механизм 8 деления мощности, и крутящим моментом, доставленным от двигателя 5 в коронную шестерню 18, отличается между HV-Lo-режимом и HV-Hi-режимом.
[0083] При условии, что крутящий момент, доставляемый в сторону первого электромотора 6, равен 1, отношение крутящего момента, прикладываемого к коронной шестерне 18 в HV-Lo-режиме, может выражаться как "1/(ρ1*ρ2)", и отношение крутящего момента, прикладываемого к коронной шестерне 18 в HV-Hi-режиме, может выражаться как "1/(ρ1)". Другими словами, при условии, что крутящий момент двигателя 5 равен 1, отношение крутящего момента двигателя 5, доставляемого в коронную шестерню 18 в HV-Lo-режиме, может выражаться как "1/(1-(ρ1*ρ2)+1)", и отношение крутящего момента двигателя 5, доставляемого в коронную шестерню 18 в HV-Hi-режиме, может выражаться как "1/(ρ1+1)". В вышеприведенных выражениях, "ρ1" представляет собой передаточное отношение секции 9 деления мощности (т.е. отношение между числом зубьев коронной шестерни 12 и числом зубьев солнечной шестерни 11), и "ρ2" представляет собой передаточное отношение трансмиссионной секции 10 (т.е. отношение между числом зубьев коронной шестерни 18 и числом зубьев солнечной шестерни 17). В частности, "ρ1" и "ρ2" отдельно меньше "1". Таким образом, в HV-Lo-режиме, отношение крутящего момента, доставляемого в коронную шестерню 18, увеличивается по сравнению с отношением в HV-Hi-режиме. Соответственно, "1/(1-(ρ1*ρ2)+1)" соответствует первому заданному отношению варианта осуществления, и "1/(ρ1+1)" соответствует второму заданному отношению варианта осуществления. Дополнительно, HV-Lo-режим соответствует первому режиму варианта осуществления, и HV-Hi-режим соответствует второму режиму варианта осуществления. Здесь, когда частота вращения двигателя 5 увеличивается посредством крутящего момента, сформированного посредством двигателя 5, выходной крутящий момент двигателя 5 вычисляется посредством вычитания крутящего момента, требуемого для того, чтобы увеличивать частоту вращения двигателя 5, из крутящего момента, сформированного посредством двигателя 5.
[0084] В HV-режиме, электрическая мощность, вырабатываемая посредством первого электромотора 6, подается во второй электромотор 7, и помимо этого, электрическая мощность, накопленная в аккумуляторе 47, также подается во второй электромотор 7 по мере необходимости. В гибридном транспортном средстве, второй электромотор 7 и задний электромотор 30 используются для того, чтобы усиливать движущий крутящий момент, сформированный посредством двигателя 5. Таким образом, задний электромотор 30 также может управляться аналогично второму электромотору 7. Тем не менее, в нижеприведенном пояснении, приводится пример, чтобы усиливать движущий крутящий момент только посредством второго электромотора 7.
[0085] В фиксированном режиме, как указано на фиг. 7, обе из первой муфты CL1 и второй муфты CL2 зацепляются таким образом, что все вращающиеся элементы в механизме 8 деления мощности вращаются с идентичной частотой вращения. Другими словами, выходная мощность двигателя 5 не преобразуется в электрическую энергию посредством первого электромотора 6 и второго электромотора 7. По этой причине, потери мощности, ассоциированные с таким преобразованием энергии, не возникают в фиксированном режиме, и в силу этого может повышаться эффективность передачи мощности.
[0086] Как указано на фиг. 8 и 9, в EV-Lo-режиме и EV-Hi-режиме, первый тормоз B1 зацепляется, и первый электромотор 6 и второй электромотор 7 формируют движущие крутящие моменты, чтобы приводить в движение гибридное транспортное средство. В EV-Lo-режиме, отношение частоты вращения коронной шестерни 18 трансмиссионной секции 10 к частоте вращения первого электромотора 6 уменьшается меньше отношения EV-Hi-режиме. Другими словами, коэффициент уменьшения частоты вращения в HV-Lo-режиме превышает коэффициент уменьшения частоты вращения в HV-Hi-режиме таким образом, что большая движущая сила устанавливается в EV-Lo-режиме. Как указано на фиг. 10, в одномоторном режиме, только второй электромотор 7 формирует движущий крутящий момент, и обе из муфты CL1 и второй муфты CL2 расцепляются. В одномоторном режиме, в силу этого все вращающиеся элементы механизма 8 деления мощности останавливаются. По этой причине, двигатель 5 и первый электромотор 6 не должны вращаться пассивно, и в силу этого потери мощности могут уменьшаться.
[0087] В гибридном транспортном средстве, рабочий режим выбирается на основе уровня SOC аккумулятора 47, скорости транспортного средства, требуемой движущей силы и т.д. Согласно варианту осуществления, рисунок выбора рабочего режима может выбираться из режима CS (т.е. поддержания заряда), в котором рабочий режим выбирается таким образом, чтобы поддерживать уровень SOC аккумулятора 47 в максимально возможной степени, и режима CD (т.е. истощения заряда), в котором рабочий режим выбирается таким образом, чтобы приводить в движение гибридное транспортное средство при потреблении электрической мощности, накопленной в аккумуляторе 47. В частности, CS-режим выбирается, когда уровень SOC аккумулятора 47 является относительно низким, и CD-режим выбирается, когда уровень SOC аккумулятора 47 является относительно высоким.
[0088] Фиг. 11 показывает пример карты, используемой для того, чтобы выбирать рабочий режим во время тяги в CS-режиме. На фиг. 11, вертикальная ось представляет требуемую движущую силу, и горизонтальная ось представляет скорость транспортного средства. Чтобы выбирать рабочий режим гибридного транспортного средства, скорость транспортного средства может определяться посредством датчика скорости транспортного средства, и требуемая движущая сила может оцениваться на основе позиции акселератора, определенной посредством датчика акселератора.
[0089] На фиг. 11, область со штриховкой представляет собой область, в которой одномоторный режим выбирается. В CS-режиме, одномоторный режим выбирается, когда гибридное транспортное средство приводится в движение в обратном направлении независимо от требуемой движущей силы, и когда гибридное транспортное средство приводится в движение в прямом направлении, и требуемая движущая сила является небольшой (или при замедлении). Такая область, в которой одномоторный режим выбирается, определяется на основе технических требований второго электромотора 7 и заднего электромотора 30.
[0090] Во время прямой тяги в CS-режиме, HV-режим выбирается, когда требуется большая движущая сила. В HV-режиме, движущая сила может формироваться от диапазона низких скоростей/пониженной передачи до диапазона высоких скоростей/повышенной передачи. Когда уровень SOC попадает близко к нижнему предельному уровню, в силу этого HV-режим может выбираться, даже если рабочая точка, регулируемая посредством требуемой движущей силы и скорости транспортного средства, попадает в область со штриховкой.
[0091] Как описано выше, HV-режим может выбираться из HV-Lo-режима, HV-Hi-режима и фиксированного режима. В CS-режиме, в частности, HV-Lo-режим выбирается, когда скорость транспортного средства является относительно низкой, и требуемая движущая сила является относительно большой, HV-Hi-режим выбирается, когда скорость транспортного средства является относительно высокой, и требуемая движущая сила является относительно небольшой, и фиксированный режим выбирается, когда рабочая точка попадает между областью, в которой HV-Lo-режим выбирается, и областью, в которой HV-Hi-режим выбирается.
[0092] В CS-режиме, рабочий режим переключается из фиксированного режима в HV-Lo-режим, когда рабочая точка сдвигается вдоль линии "Lo←Fix" справа налево, либо когда рабочая точка сдвигается вдоль линии "Lo←Fix" вверх снизу. В отличие от этого, рабочий режим переключается из HV-Lo-режима в фиксированный режим, когда рабочая точка сдвигается вдоль линии "Lo→Fix" слева направо, либо когда рабочая точка сдвигается вдоль линии "Lo→Fix" вниз сверху. Аналогично, рабочий режим переключается из HV-Hi-режима в фиксированный режим, когда рабочая точка сдвигается вдоль линии "Fix←Hi" справа налево, либо когда рабочая точка сдвигается вдоль линии "Fix←Hi" вверх снизу. В отличие от этого, рабочий режим переключается из фиксированного режима в HV-Hi-режим, когда рабочая точка сдвигается вдоль линии "Fix→Hi" слева направо, либо когда рабочая точка сдвигается вдоль линии "Fix→Hi" вниз сверху.
[0093] Фиг. 12 показывает пример карты, используемой для того, чтобы выбирать рабочий режим во время тяги в CD-режиме. На фиг. 12, вертикальная ось также представляет требуемую движущую силу, и горизонтальная ось также представляет скорость транспортного средства.
[0094] На фиг. 12, область со штриховкой также представляет собой область, в которой одномоторный режим выбирается. В CD-режиме, одномоторный режим выбирается, когда гибридное транспортное средство приводится в движение в обратном направлении независимо от требуемой движущей силы, и когда гибридное транспортное средство приводится в движение в прямом направлении, и требуемая движущая сила меньше первого порогового значения F1 силы (или при замедлении). Такая область, в которой выбирается одномоторный режим, также определяется на основе технических требований второго электромотора 7 и заднего электромотора 30.
[0095] Во время прямой тяги в CD-режиме, двухэлектромоторный режим выбирается, когда требуется движущая сила, большая первого порогового значения F1 силы. В этом случае, HV-режим выбирается, когда скорость транспортного средства выше первой пороговой скорости V1, либо когда скорость транспортного средства выше второй пороговой скорости V2, и требуемая движущая сила превышает второе пороговое значение F2 силы. Как описано выше, движущая сила может формироваться от диапазона низких скоростей/пониженной передачи до диапазона высоких скоростей/повышенной передачи в HV-режиме. Когда уровень SOC аккумулятора 47 попадает близко к нижнему предельному уровню, в силу этого HV-режим может выбираться, даже если рабочая точка попадает в области, в которых одномоторный режим и двухэлектромоторный режим выбираются.
[0096] В CD-режиме, HV-Lo-режим также выбирается, когда скорость транспортного средства является относительно низкой, и требуемая движущая сила является относительно большой, HV-Hi-режим также выбирается, когда скорость транспортного средства является относительно высокой, и требуемая движущая сила является относительно небольшой, и фиксированный режим также выбирается, когда рабочая точка попадает между областью, в которой HV-Lo-режим выбирается, и областью, в которой HV-Hi- выбирается режим.
[0097] В CD-режиме, рабочий режим переключается между фиксированным режимом и HV-Lo-режимом, когда рабочая точка сдвигается вдоль линии "Lo↔Fix". Аналогично, рабочий режим переключается из HV-Hi-режима и фиксированного режима, когда рабочая точка сдвигается вдоль "Fix↔Hi".
[0098] На картах, показанных на фиг. 11 и 12, области каждого рабочего режима и линии, задающие области, могут изменяться в зависимости от температур компонентов первого модуля 2 привода, аккумулятора 47, систем 44, 45 и 46 управления мощностью и уровня SOC аккумулятора 47.
[0099] Нормально разомкнутая муфта может использоваться отдельно в качестве первой муфты CL1 и второй муфты CL2. Помимо этого, нормально замкнутая муфта также может использоваться отдельно в качестве первой муфты CL1 и второй муфты CL2. В противном случае, нормально разомкнутая муфта может использоваться в качестве любой из первой муфты CL1 и второй муфты CL2, и нормально замкнутая муфта может использоваться в качестве другой из первой муфты CL1 и второй муфты CL2. Если требуемое гидравлическое давление или электричество не может подаваться в эти муфты вследствие неисправности, рабочий режим транспортного средства может переключаться непреднамеренно. Следовательно, коэффициент усиления крутящего момента для крутящего момента, доставленного от двигателя 5 на передние колеса 1R и 1L, может изменяться, за счет этого формируя толчок.
[0100] В частности, нормально разомкнутая муфта зацепляется, чтобы передавать крутящий момент через нее посредством приложения гидравлического давления или электричества выше заданного уровня к ней, и высвобождается или расцепляется, когда гидравлическое давление или электричество уменьшается ниже заданного уровня. Другими словами, нормально разомкнутая муфта зацепляется, когда сигнал команды управления зацеплением применяется, и расцепляется, когда сигнал команды управления не применяется. В отличие от этого, нормально замкнутая муфта зацепляется, чтобы передавать крутящий момент через нее, когда гидравлическое давление или электричество, прикладываемое к ней, ниже заданного уровня, и высвобождается или расцепляется посредством приложения гидравлического давления или электричества выше заданного уровня к ней. Другими словами, нормально замкнутая муфта расцепляется, когда сигнал команды управления расцеплением применяется, и зацепляется, когда сигнал команды управления не применяется.
[0101] Например, в случае если нормально разомкнутая муфта используется отдельно в качестве первой муфты CL1 и второй муфты CL2, и некоторая неисправность возникает в актуаторе, чтобы приводить в действие вторую муфту CL2 во время тяги в HV-Hi-режиме, требуемая величина управления для того, чтобы зацеплять вторую муфту CL2, не может поддерживаться, и в силу этого вторая муфта CL2 расцепляется непреднамеренно. Следовательно, рабочий режим переключается из HV-Hi-режима в HV-Lo-режим, за счет этого вызывая толчок.
[0102] В отличие от этого, в случае если нормально замкнутая муфта используется отдельно в качестве первой муфты CL1 и второй муфты CL2, и некоторая неисправность возникает в актуаторе, чтобы приводить в действие первую муфту CL1 во время тяги в HV-Hi-режиме, требуемая величина управления для того, чтобы расцеплять первую муфту CL1, не может поддерживаться, и в силу этого первая муфта CL1 зацепляется непреднамеренно. Следовательно, рабочий режим переключается из HV-Hi-режима в фиксированный режим, за счет этого вызывая толчок.
[0103] Таким образом, если требуемая величина управления для того, чтобы сохранять нормально разомкнутую муфту в зацеплении или сохранять нормально разомкнутую муфту в расцеплении вследствие некоторой неисправности, рабочий режим переключается непреднамеренно при возникновении толчка.
[0104] Чтобы предотвращать такой недостаток, согласно варианту осуществления, сохраняющая состояние муфта используется в качестве, по меньшей мере, одной из первой муфты CL1 и второй муфты CL2. Сохраняющая состояние муфта приводится в действие посредством актуатора с возможностью зацепляться при приеме сигнала команды управления зацеплением, например, из ECU 52 муфты и расцепляться при приеме сигнала команды управления расцеплением, например, из ECU 52 муфты. Например, в случае если сохраняющая состояние муфта зацепляется, сохраняющая состояние муфта остается в зацеплении, даже если передача сигналов в нее прерывается, и в силу этого актуатор прекращает приведение в действие сохраняющей состояние муфты. В отличие от этого, в случае если сохраняющая состояние муфта расцепляется, сохраняющая состояние муфта остается в расцеплении, даже если передача сигналов в нее прерывается, и в силу этого актуатор прекращает приведение в действие сохраняющей состояние муфты. Таким образом, состояние зацепления сохраняющей состояние муфты переключается при приеме сигнала команды управления, и сохраняющая состояние муфта остается в текущем состоянии зацепления, даже если передача сигналов в нее прерывается, либо в случае неисправности актуатора или самой муфты.
[0105] Пример конструкции сохраняющей состояние муфты показан на фиг. 13. Сохраняющая состояние муфта CL, показанная на фиг. 13, может использоваться не только в качестве первой муфты CL1, но также и второй муфты CL2. В частности, сохраняющая состояние муфта CL представляет собой кулачковую муфту, имеющую пару вращающихся компонентов 53 и 54. Собачки 55 формируются на вращающемся компоненте 53, и собачки 56 формируются на вращающемся компоненте 54 при расположении напротив друг друга, и сохраняющей состояние муфте CL обеспечивается возможность передавать крутящий момент через нее посредством зацепления собачек 55 с собачками 56. При условии, что сохраняющая состояние муфта CL используется в качестве первой муфты CL1, один из вращающихся компонентов 53 и 54 служит в качестве вращающегося диска 14a, и другой из вращающихся компонентов 53 или 54 служит в качестве водила 20. В отличие от этого, при условии, что сохраняющая состояние муфта CL используется в качестве второй муфты CL2, один из вращающихся компонентов 53 и 54 служит в качестве вращающегося диска 20a, и другой из вращающихся компонентов 53 или 54 служит в качестве коронной шестерни 18.
[0106] Вращающийся компонент 53 (в дальнейшем называется "первым вращающимся компонентом") подталкивается в направлении к и извлекается в направлении от вращающегося компонента 54 (в дальнейшем называется "вторым вращающимся компонентом") посредством актуатора 57. В частности, актуатор 57 включает в себя электромотор (не показан), пластину 58, вращаемую посредством крутящего момента электромотора, стержень 59, который совершает возвратно-поступательное движение посредством вращения пластины 58, чтобы подталкивать и извлекать первый вращающийся компонент 53 в направлении к/от второго вращающегося компонента 54.
[0107] Пластина 58 содержит сквозное отверстие 61, в которое вставляется вал 60 для того, чтобы передавать крутящий момент электромотора, сквозное отверстие 62, которое формируется радиально на большом расстоянии от центра вращения пластины 58, и первую выемку 63 и вторую выемку 64, отдельно сформированные на большом расстоянии от сквозного отверстия 62 в направлении вращения при утапливании к центру вращения пластины 58. Один из концевых фрагментов стержня 59 вставляется в сквозное отверстие 62.
[0108] Чтобы вращать пластину 58 вместе с валом 60, шпоночный выступ формируется на валу 60, и шпоночная канавка, зацепленная со шпоночным выступом, формируется в сквозном отверстии 61. Сквозному отверстию 62 и упомянутому одному из концевого фрагмента стержня 59 обеспечивается возможность вращаться относительно друг друга, и стопор (не показан) формируется на переднем конце упомянутого одного из концевого фрагмента стержня 59.
[0109] Компонент 65 стопора присоединяется к кожуху C, и зацепляющийся фрагмент, сформированный на переднем конце компонента 65 стопора, зацепляется с первой выемкой 63 или второй выемкой 64, чтобы прекращать вращение пластины 58. В частности, компонент 65 стопора зацепляется с первой выемкой 63, когда первые собачки 55 расположены в самой дальней позиции от вторых собачек 56, и зацепляется со второй выемкой 64, когда первые собачки 55 зацепляются со вторыми собачками 56, чтобы передавать крутящий момент. Наклоны наклонной поверхности 63a первой выемки 63 и наклонной поверхности 64a второй выемки 64 задаются таким образом, что компонент 65 стопора расцепляется от первой выемки 63 или второй выемки 64 посредством крутящего момента, прикладываемого к пластине 58 из электромотора, но расцепляется от первой выемки 63 или второй выемки 64 посредством возмущений, таких как вибрация транспортного средства. Когда пластина 58 вращается посредством крутящего момента, прикладываемого из электромотора, компонент 65 стопора упруго извлекается из одной из первой выемки 63 и второй выемки 64 и перемещается в смежную выемку поверх выступа, сформированного посредством наклонной поверхности 63a и наклонной поверхности 64a.
[0110] Электромотор прикладывает крутящий момент к пластине 58 в соответствии с сигналом команды управления зацеплением или сигналом команды управления расцеплением. Следовательно, компонент 65 стопора зацепляется избирательно с первой выемкой 63 и второй выемкой 64 в зависимости от направления вращения пластины 58. Тем не менее, компонент 65 стопора не расцепляется от первой выемки 63 или второй выемки 64 от возмущений, таких как вибрация транспортного средства.
[0111] В частности, упомянутый один из концевого фрагмента стержня 59 изгибается к пластине 58 (т.е. вверх на фиг. 13) и дополнительно изгибается с возможностью вставляться в сквозное отверстие 62 (т.е. в направлении толщины пластины 58). Промежуточный фрагмент стержня 59 вставляется в направляющую канавку G (или направляющее отверстие) при обеспечении возможности совершать возвратно-поступательное движение в ней, и пружина 66 сжатия присоединяется к переднему концу другого концевого фрагмента стержня 59. Пружина 66 сжатия дополнительно соединяется с первым вращающимся компонентом 53 через упорный подшипник 67 таким образом, что пружине 66 сжатия и первому вращающемуся компоненту 53 обеспечивается возможность вращаться относительно друг друга. Таким образом, нагрузка пружины 66 сжатия прикладывается к первому вращающемуся компоненту 53 через упорный подшипник 67. В частности, осевая сила стержня 59, устанавливаемая посредством крутящего момента пластины 58, передается в первый вращающийся компонент 53 через пружину 66 сжатия и упорный подшипник 67.
[0112] Таким образом, сохраняющая состояние муфта CL может поддерживать текущее состояние зацепления, даже когда крутящий момент не может прикладываться к пластине 58 вследствие неисправности в электромоторе или электрической схеме для управления электромотором. Как описано выше, согласно варианту осуществления, сохраняющая состояние муфта CL используется в качестве, по меньшей мере, одной из первой муфты CL1 и второй муфты CL2. В силу этого, согласно варианту осуществления, рабочий режим не должен переключаться непреднамеренно в случае неисправности сохраняющей состояние муфты CL. По этой причине, коэффициент усиления крутящего момента для крутящего момента, доставленного от двигателя 5 на передние колеса 1R и 1L, не должен изменяться, даже если неисправность возникает в сохраняющей состояние муфте CL. Таким образом, толчок, получающийся в результате неисправности муфты, может уменьшаться.
[0113] Такая непреднамеренная смена режима, получающаяся в результате неисправности муфты, может предотвращаться безусловно посредством использования сохраняющей состояние муфты CL в качестве как первой муфты CL1, так и второй муфты CL2.
[0114] Когда неисправность возникает в электрической схеме, которая управляет электропитанием в электромотор, либо когда непреднамеренная команда передается из контроллера (например, из ECU 52 муфты), электромотор может формировать крутящий момент непреднамеренно. В этой ситуации, если первый вращающийся компонент 53 и второй вращающийся компонент 54 вращаются относительно друг друга, передние концы первых собачек 55 могут контактировать с передними концами вторых собачек 56, и в силу этого первые собачки 55 не могут зацепляться надлежащим образом со вторыми собачками 56. В силу этого, в этой ситуации, первые собачки 55 и вторые собачки 56 могут быть повреждены, если зацепляются между собой посредством чрезмерной нагрузки. Помимо этого, толчок при зацеплении может увеличиваться посредством контакта между первыми собачками 55 и вторыми собачками 56. Тем не менее, в сохраняющей состояние муфте CL, такая нагрузка, прикладываемая к первым собачкам 55 и вторые собачки 56, и трение, действующее на первые собачки 55 и вторые собачки, 56 могут поглощаться посредством пружины 66 сжатия. По этой причине, толчок при зацеплении может подавляться, и повреждение первых собачек 55 и вторых собачек 56 может быть ограничено.
[0115] Конструкция сохраняющей состояние муфты CL не должна ограничиваться конструкцией, показанной на фиг. 13. Например, выемка также может формироваться на стержне 59. В этом случае, состояние зацепления сохраняющей состояние муфты CL поддерживается посредством вставки штифта в выемку посредством возвратно-поступательного движения штифта посредством актуатора. Помимо этого, первый вращающийся компонент 53 и второй вращающийся компонент 54 также могут зацепляться фрикционно вместо использования собачек. В этом случае, сохраняющая состояние муфта CL может содержать механизм для ограничения позиции компонента, чтобы подталкивать фрикционный диск, чтобы поддерживать текущее состояние зацепления. Дополнительно, актуатор 57 также может приводиться в действие гидравлически вместо использования электромотора. В этом случае, сохраняющая состояние муфта CL может содержать тарельчатый клапан в гидравлической схеме, чтобы подавлять флуктуацию давления в гидравлической камере.
[0116] В случае если сохраняющая состояние муфта CL используется в качестве одной из первой муфты CL1 и второй муфты CL2, и нормально разомкнутая муфта используется в качестве другой из первой муфты CL1 или второй муфты CL2, механизм 8 деления мощности должен переводиться на нейтральную ступень в случае неисправности нормально разомкнутой муфты. В этом случае, хотя толчок будет возникать из-за временного уменьшения ускорения, такой толчок меньше толчка, получающегося в результате непреднамеренного зацепления муфты. Таким образом, толчок, получающийся в результате непреднамеренного зацепления муфты, может уменьшаться по сравнению с толчком для случая, в котором нормально замкнутая муфта используется в качестве другой из первой муфты CL1 или второй муфты CL2.
[0117] В том случае, если сигнал команды управления не может передаваться в обе из сохраняющей состояние муфты и нормально разомкнутой муфты вследствие неисправности во время тяги при зацеплении сохраняющей состояние муфты и расцеплении нормально разомкнутой муфты, крутящий момент не может доставляться от двигателя 5 на передние колеса 1R и 1L. Тем не менее, в первом модуле 2 привода, показанном на фиг. 1, транспортному средству по-прежнему обеспечивается возможность приводиться в движение посредством крутящего момента второго электромотора 7, доставляемого на передние колеса 1R и 1L без прохождения через механизм 8 деления мощности. Таким образом, транспортному средству обеспечивается возможность эвакуироваться посредством другого первичного движителя независимо от состояний зацепления первой муфты CL1 и второй муфты CL2. Здесь, транспортному средству обеспечивается возможность эвакуироваться посредством другого первичного движителя в случае неисправности муфт даже в случае, если сохраняющая состояние муфта отдельно используется в качестве первой муфты CL1 и второй муфты CL2.
[0118] В случае если сохраняющая состояние муфта CL используется в качестве одной из первой муфты CL1 и второй муфты CL2, и нормально замкнутая муфта используется в качестве другой из первой муфты CL1 или второй муфты CL2, если сигнал команды управления не может передаваться в обе из сохраняющей состояние муфты и нормально замкнутой муфты вследствие неисправности во время тяги при расцеплении сохраняющей состояние муфты и зацеплении нормально замкнутой муфты, нормально замкнутая муфта должна переводиться в зацепление. В этом случае, крутящий момент двигателя по-прежнему может доставляться на передние колеса 1R и 1L, чтобы обеспечивать возможность транспортному средству эвакуироваться, даже если уровень SOC аккумулятора 47 является низким.
[0119] Здесь поясняется процедура, которая должна выполняться в ситуации, в которой сохраняющая состояние муфта отдельно используется в качестве первой муфты CL1 и второй муфты CL2, и сигналы команд управления не могут передаваться в первую муфту CL1 и вторую муфту CL2 вследствие неисправности, со ссылкой на фиг. 14. В частности, процедура, показанная на фиг. 14, выполняется во время тяги в HV-Hi-режиме или HV-Lo-режиме. На этапе S1, определяется то, возникает или нет неисправность в любой из первой муфты CL1 и второй муфты CL2. Такое определение на этапе S1 может выполняться на основе сигнала определения из датчика угла вращения, который определяет угол вращения пластины 58. В частности, возникновение неисправности в муфте может определяться на основе того факта, что угол вращения пластины 58 не определяется посредством датчика несмотря на передачу команды зацепления или команды расцепления в муфту. Помимо этого, возникновение неисправности в муфте может определяться, если определяется короткое замыкание электрической схемы, соединенной с электромотором.
[0120] Если неисправность не возникает ни в одной из первой муфты CL1 и второй муфты CL2 таким образом, что ответ этапа S1 представляет собой "Нет", процедура возвращается. В этом случае, первая муфта CL1 и вторая муфта CL2 управляются посредством нормальной процедуры. В отличие от этого, если неисправность возникает в любой из первой муфты CL1 и второй муфты CL2 таким образом, что ответ этапа S1 представляет собой "Да", процедура переходит к этапу S2, чтобы поддерживать текущие состояния зацепления муфт, и после этого возвращается. Таким образом, текущий рабочий режим поддерживается. Другими словами, в случае если ответ этапа S1 представляет собой "Да", передача сигнала команды управления зацеплением или сигнала команды управления расцеплением в муфты прекращается.
[0121] Таким образом, рабочий режим не должен переключаться в случае неисправности во время тяги в HV-Hi-режиме или HV-Lo-режиме. В фиксированном режиме, если скорость транспортного средства уменьшается ниже самоподдерживающейся скорости, двигатель 5 может не приводиться в действие. В EV-режиме, если уровень SOC аккумулятора падает чрезмерно, не может формироваться большая движущая сила, и транспортное средство может не приводиться в движение. В силу этого, согласно варианту осуществления, HV-режим выбирается на основе приоритета в случае неисправности муфты таким образом, чтобы формировать движущую силу в более широком рабочем диапазоне и приводить в движение транспортное средство посредством как топлива, так и электричества. Чтобы поддерживать рабочий режим как HV-Hi-режим или HV-Lo-режим в случае неисправности муфты, предпочтительно использовать нормально разомкнутую муфту в качестве первого тормоза B1.
[0122] Фиг. 15 показывает процедуру, выполняемую во время тяги в фиксированном режиме. На этапе S11, определяется то, возникает или нет неисправность во второй муфте CL2. Такое определение может выполняться посредством идентичного способа, как на вышеприведенном этапе S1.
[0123] Если неисправность возникает во второй муфте CL2 таким образом, что ответ этапа S11 представляет собой "Да", процедура переходит к этапу S12, чтобы определять то, находится или нет первая муфта CL1 в зацеплении. Поскольку транспортное средство в данный момент приводится в движение в фиксированном режиме, первая муфта CL1 зацепляется, когда неисправность возникает во второй муфте CL2, и в силу этого процедура переходит к этапу S12. Если первая муфта CL1 уже расцеплена посредством выполнения нижеуказанного этапа S13 таким образом, что ответ этапа S12 представляет собой "Нет", процедура возвращается. Например, зацепление первой муфты CL1 может определяться посредством определения величины хода первого вращающегося компонента 53. Альтернативно, зацепление первой муфты CL1 также может определяться на основе того факта, что относительное вращение не возникает между водилом 14 секции 9 деления мощности и водилом 20 трансмиссионной секции 10.
[0124] В отличие от этого, если первая муфта CL1 зацепляется таким образом, что ответ этапа S12 представляет собой "Да", процедура переходит к этапу S13, чтобы расцеплять первую муфту CL1, и после этого возвращается. Следовательно, рабочий режим переключается из фиксированного режима в HV-Hi-режим независимо от рабочей точки. В этом случае, например, рабочий режим может переключаться в HV-Hi-режим посредством простой передачи сигнала команды управления расцеплением в первую муфту CL1 при выборе фиксированного режима при управлении. Вместо этого, также можно переключать рабочий режим в HV-Hi-режим посредством выбора HV-Hi-режима посредством управления. Как описано выше, если первая муфта CL1 уже расцеплена на этапе S13 таким образом, что ответ этапа S12 представляет собой "Нет", процедура возвращается.
[0125] В противном случае, если неисправность не возникает во второй муфте CL2 таким образом, что ответ этапа S11 представляет собой "Нет", процедура переходит к этапу S14, чтобы определять то, возникает или нет неисправность в первой муфте CL1. Такое определение может выполняться посредством идентичного способа, как на вышеприведенном этапе S14.
[0126] Если неисправность не возникает в первой муфте CL1 таким образом, что ответ этапа S14 представляет собой "Нет", это означает то, что обе из первой муфты CL1 и второй муфты CL2 могут работать надлежащим образом. Следовательно, в этом случае, процедура возвращается, и первая муфта CL1 и вторая муфта CL2 управляются посредством нормального управления. В отличие от этого, если неисправность возникает в первой муфте CL1 таким образом, что ответ этапа S14 представляет собой "Да", процедура переходит к этапу S15, чтобы определять то, зацеплена или нет вторая муфта CL2. Поскольку транспортное средство в данный момент приводится в движение в фиксированном режиме, вторая муфта CL2 зацепляется, когда неисправность возникает в первой муфте CL1, и в силу этого процедура переходит к этапу S16. Если вторая муфта CL2 уже расцеплена посредством выполнения нижеуказанного этапа S16 таким образом, что ответ этапа S15 представляет собой "Нет", процедура возвращается. Зацепление второй муфты CL2 может определяться посредством идентичного способа, как на вышеприведенном этапе S13.
[0127] В отличие от этого, если вторая муфта CL2 зацепляется таким образом, что ответ этапа S15 представляет собой "Да", процедура переходит к этапу S16, чтобы расцеплять вторую муфту CL2, и после этого возвращается. Следовательно, рабочий режим переключается из фиксированного режима в HV-Lo-режим независимо от рабочей точки. В этом случае, например, рабочий режим может переключаться в HV-Lo-режим посредством простой передачи сигнала команды управления расцеплением во вторую муфту CL2 при выборе фиксированного режима при управлении. Вместо этого, также можно переключать рабочий режим в HV-Lo-режим посредством выбора HV-Lo-режима посредством управления. Как описано выше, если вторая муфта CL2 уже расцеплена на этапе S16 таким образом, что ответ этапа S15 представляет собой "Нет", процедура возвращается.
[0128] Фиг. 16 показывает временные изменения частот вращения двигателя 5, первого электромотора 6 и второго электромотора 7 (Ne, Ng, Nm), крутящих моментов двигателя 5, первого электромотора 6 и второго электромотора 7 (Te, Tg, Tm) и состояния зацепления второй муфты CL2 во время выполнения процедуры, показанной на фиг. 15. В частности, фиг. 16 показывает ситуацию, в которой первая муфта CL1 не может расцепляться во время тяги в фиксированном режиме. Помимо этого, временные изменения целевого рабочего режима, текущего выбранного рабочего режима (называется просто "выбранным рабочим режимом") и фактического рабочего режима также показаны на фиг. 16. На фиг. 16, передаточное отношение указывается в качестве "1" для удобства.
[0129] В момент t0 времени, первая муфта CL1 и вторая муфта CL2 работают надлежащим образом, и в силу этого неисправность еще не определена. В момент t0 времени, в силу этого целевой рабочий режим, текущий рабочий режим и фактический рабочий режим находятся в фиксированном режиме. В этой ситуации, двигатель 5, первый электромотор 6 и второй электромотор 7 вращаются с идентичной частотой вращения, и двигатель 5 формирует крутящий момент, чтобы достигать требуемой движущей силы. С другой стороны, первый электромотор 6 и второй электромотор 7 не формируют крутящие моменты, и вторая муфта CL2 зацепляется.
[0130] В момент t1 времени, неисправность первой муфты CL1 определяется, и процедура, показанная на фиг. 15, переходит от этапа S14 к S15. Следовательно, вторая муфта CL2 расцепляется. В этой ситуации, если на вторую муфту CL2 действует крутящий момент, фрикционное сопротивление, действующее между первыми собачками 55 и вторыми собачками 56, должно увеличиваться. Чтобы предотвращать такой недостаток, крутящий момент, прикладываемый ко второй муфте CL2, уменьшается. С этой целью, целевой рабочий режим переключается в HV-Lo-режим в момент t2 времени. Помимо этого, первый электромотор 6 начинает формирование крутящего момента в направлении, чтобы уменьшать ее частоту вращения, и второй электромотор 7 начинает формирование крутящего момента в направлении, чтобы увеличивать ее частоту вращения. Другими словами, второй электромотор 7 начинает формирование движущего крутящего момента таким образом, чтобы уменьшать выходной крутящий момент механизма 8 деления мощности при предотвращении уменьшения движущей силы. В момент t2 времени, фактический рабочий режим переключается из фиксированного режима в HV-Lo-режим.
[0131] Когда крутящий момент, прикладываемый ко второй муфте CL2, уменьшается ниже заданного значения в момент t3 времени, сигнал команды управления расцеплением передается во вторую муфту CL2, и расцепление второй муфты CL2 завершается в момент t4 времени. Следовательно, выбранный рабочий режим переключается в HV-Lo-режим. Как описано выше, в HV-Lo-режиме, частота вращения первого электромотора 6 управляется таким способом, чтобы повышать эффективность работы первого модуля 2 привода. С этой целью, в частности, частота вращения первого электромотора 6 уменьшается от момента t4 времени, чтобы увеличивать частоту вращения двигателя 5.
[0132] В этой ситуации, если двигатель 5 непрерывно формирует идентичную абсолютную величину крутящего момента, как указано выше, то выходная мощность двигателя будет увеличиваться. Во избежание такого увеличения мощности двигателя в этой ситуации, крутящий момент двигателя 5 уменьшается с увеличением частоты вращения двигателя 5, чтобы сохранять крутящий момент двигателя постоянным. В этой ситуации, первый электромотор 6 формирует полный крутящий момент из: реактивного крутящего момента, требуемого для того, чтобы доставлять выходную мощность двигателя 5 на передние колеса 1R и 1L; и крутящего момента, требуемого для того, чтобы увеличивать частоту вращения двигателя 5 и уменьшать частоту вращения первого электромотора 6. В этой ситуации, второй электромотор 7 не формирует крутящий момент.
[0133] Когда частота вращения двигателя 5 повышается до целевой частоты вращения в момент t5 времени, рабочие условия двигателя 5, первого электромотора 6 и второго электромотора 7 поддерживаются. В момент t5 времени, фактический рабочий режим переключается в HV-Lo-режим.
[0134] Обращаясь к фиг. 17, показана процедура, выполняемая во время тяги в одномоторном режиме, в котором обе из первой муфты CL1 и второй муфты CL2 расцепляются. На этапе S21, определяется то, возникает или нет неисправность во второй муфте CL2. Такое определение может выполняться посредством идентичного способа, как на вышеприведенных этапах S1 и S11.
[0135] Если неисправность возникает во второй муфте CL2 таким образом, что ответ этапа S21 представляет собой "Да", процедура переходит к этапу S22, чтобы определять то, находится или нет первая муфта CL1 в расцеплении. Поскольку транспортное средство в данный момент приводится в движение в одномоторном режиме, первая муфта CL1 расцепляется, когда неисправность возникает во второй муфте CL2, и в силу этого процедура переходит к этапу S22. Если первая муфта CL1 уже зацеплена посредством выполнения нижеуказанного этапа S23 таким образом, что ответ этапа S22 представляет собой "Нет", процедура возвращается. Например, расцепление первой муфты CL1 может определяться посредством определения величины хода первого вращающегося компонента 53. Альтернативно, расцепление первой муфты CL1 также может определяться на основе того факта, что относительное вращение возникает между водилом 14 секции 9 деления мощности и водилом 20 трансмиссионной секции 10.
[0136] Если первая муфта CL1 расцепляется таким образом, что ответ этапа S22 представляет собой "Да", процедура переходит к этапу S23, чтобы зацеплять первую муфту CL1, и после этого возвращается. Следовательно, рабочий режим переключается из одномоторного режима в HV-Lo-режим независимо от рабочей точки. В этом случае, например, рабочий режим может переключаться в HV-Lo-режим посредством простой передачи сигнала команды управления зацеплением в первую муфту CL1 при выборе одномоторного режима при управлении. Вместо этого, также можно переключать рабочий режим в HV-Lo-режим посредством выбора HV-Lo-режима посредством управления. Как описано выше, если первая муфта CL1 уже зацеплена на этапе S23 таким образом, что ответ этапа S22 представляет собой "Нет", процедура возвращается.
[0137] В противном случае, если неисправность не возникает во второй муфте CL2 таким образом, что ответ этапа S21 представляет собой "Нет", процедура переходит к этапу S24, чтобы определять то, возникает или нет неисправность в первой муфте CL1. Такое определение может выполняться посредством идентичного способа, как на вышеприведенных этапах S1 и S14.
[0138] Если неисправность не возникает в первой муфте CL1 таким образом, что ответ этапа S24 представляет собой "Нет", это означает то, что обе из первой муфты CL1 и второй муфты CL2 могут работать надлежащим образом. Следовательно, в этом случае, процедура возвращается, и первая муфта CL1 и вторая муфта CL2 управляются посредством нормального управления. В отличие от этого, если неисправность возникает в первой муфте CL1 таким образом, что ответ этапа S24 представляет собой "Да", процедура переходит к этапу S25, чтобы определять то, расцеплена или нет вторая муфта CL2. Поскольку транспортное средство в данный момент приводится в движение в одномоторном режиме, вторая муфта CL2 расцепляется, когда неисправность возникает в первой муфте CL1, и в силу этого процедура переходит к этапу S26. Если вторая муфта CL2 уже зацеплена посредством выполнения нижеуказанного этапа S26 таким образом, что ответ этапа S25 представляет собой "Нет", процедура возвращается. Расцепление второй муфты CL2 может определяться посредством идентичного способа, как на вышеприведенном этапе S23.
[0139] В отличие от этого, если вторая муфта CL2 расцепляется таким образом, что ответ этапа S25 представляет собой "Да", процедура переходит к этапу S26, чтобы зацеплять вторую муфту CL2, и после этого возвращается. Следовательно, рабочий режим переключается из одномоторного режима в HV-Hi-режим независимо от рабочей точки. В этом случае, например, рабочий режим может переключаться в HV-Hi-режим посредством простой передачи сигнала команды управления зацеплением во вторую муфту CL2 при выборе одномоторного режима при управлении. Вместо этого, также можно переключать рабочий режим в HV-Hi-режим посредством выбора HV-Hi-режима посредством управления. Как описано выше, если вторая муфта CL2 уже зацеплена на этапе S26 таким образом, что ответ этапа S25 представляет собой "Нет", процедура возвращается.
[0140] Таким образом, когда неисправность возникает в одной из муфт, рабочий режим переключается в HV-режим посредством манипулирования другой муфтой таким образом, что транспортному средству обеспечивается возможность эвакуироваться посредством доставки крутящего момента двигателя на передние колеса 1R и 1L. В этой ситуации, крутящий момент второго электромотора 7 может добавляться в крутящий момент, доставляемый на передние колеса 1R и 1L. Вместо этого, транспортное средство также может приводиться в движение посредством крутящего момента второго электромотора 7 при остановке двигателя 5 и первого электромотора 6. Таким образом, транспортное средство может приводиться в движение с использованием не только топлива, но также и электричества. По этой причине, расстояние до опустошения с возможностью эвакуировать транспортное средство, может быть увеличено. Помимо этого, поскольку большая движущая сила может формироваться в HV-режиме, состояние движения не должно ограничиваться посредством возникновения неисправности.
[0141] Хотя описаны вышеуказанные примерные варианты осуществления настоящей заявки, специалисты в данной области техники должны понимать, что настоящая заявка не должно быть ограничена описанными примерными вариантами осуществления, и различные изменения и модификации могут вноситься в пределах сущности и объема настоящей заявки. В дальнейшем в этом документе, поясняются примеры модификаций гибридного транспортного средства со ссылкой на фиг. 18-23. В нижеприведенном пояснении, общие ссылки с номерами выделены элементам, общим с элементами вышеприведенного варианта осуществления, и подробное пояснение для общих элементов опускается.
[0142] Гибридное транспортное средство, показанное на фиг. 18, содержит первый дифференциальный механизм PL1, соединенный непосредственно с двигателем 5, и второй дифференциальный механизм PL2, соединенный непосредственно с первым электромотором 6.
[0143] Первый дифференциальный механизм PL1 представляет собой планетарный зубчатый механизм односателлитного типа, содержащий: солнечную шестерню S1, сформированную вокруг выходного вала 15 двигателя 5 (или входного вала 16); коронную шестерню R1, размещаемую концентрически с солнечной шестерней S1; сателлитные шестерни P1, размещенные между солнечной шестерней S1 и коронной шестерней R1 при введении в зацепление с обеими шестернями S1 и R1; и водило C1, поддерживающее сателлитные шестерни P1 вращающимся способом.
[0144] Второй дифференциальный механизм PL2 также представляет собой планетарный зубчатый механизм односателлитного типа, содержащий: солнечную шестерню S2, соединенную с первым электромотором 6; водило C2, соединенное с коронной шестерней R1 первого дифференциального механизма PL1; и коронную шестерню R2, соединенную с выходной шестерней 21. Выходная шестерня 21 вводится в зацепление с ведомой шестерней 23, чтобы распределять крутящий момент на передние колеса 1R и 1L.
[0145] В первом дифференциальном механизме PL1, солнечная шестерня S1 и водило C1 зацепляются между собой через четвертую муфту CL4, чтобы вращать вращающиеся элементы первого дифференциального механизма PL1 как единое целое. Водило C1 первого дифференциального механизма PL1 и коронная шестерня R2 второго дифференциального механизма PL2 зацепляются между собой через пятую муфту CL5. Тормоз B1 располагается на выходном валу 15 двигателя 5. Например, фрикционная муфта и кулачковая муфта также могут использоваться отдельно в качестве муфт CL4 и CL5.
[0146] В гибридном транспортном средстве, показанном на фиг. 18, HV-Hi-режим, в котором отношение крутящего момента, доставляемого в коронную шестерню R2, является относительно небольшим, устанавливается посредством зацепления четвертой муфты CL4, и HV-Lo-режим, в котором отношение крутящего момента, доставляемого в коронную шестерню R2, является относительно большим, устанавливается посредством зацепления пятой муфты CL5.
[0147] Фиг. 19 указывает частоты вращения вращающихся элементов первого дифференциального механизма PL1 и второго дифференциального механизма PL2 в HV-Hi-режиме гибридного транспортного средства, показанного на фиг. 18. Как показано на фиг. 19, HV-Hi-режим устанавливается посредством зацепления четвертой муфты CL4 таким образом, что вращающиеся элементы в первом дифференциальном механизме PL1 вращаются как единое целое. Следовательно, водило C2 в качестве входного элемента второго дифференциального механизма PL2 вращается с частотой вращения, идентичной частоте вращения двигателя 5. В HV-Hi-режиме, солнечной шестерне S2 второго дифференциального механизма PL2 обеспечивается возможность служить в качестве реактивного элемента посредством приложения реактивного крутящего момента к ней из первого электромотора 6, и в силу этого коронной шестерне R2 второго дифференциального механизма PL2 обеспечивается возможность служить в качестве выходного элемента, чтобы доставлять крутящий момент в выходную шестерню 21. При условии, что крутящий момент двигателя, доставляемый в сторону первого электромотора 6, равен 1, отношение крутящего момента, прикладываемого к коронной шестерне R2 в HV-Hi-режиме, может выражаться как "1/ρ4". В гибридном транспортном средстве, показанном на фиг. 18, отношение между числом зубьев коронной шестерни R1 и числом зубьев солнечной шестерни S1 составляет "ρ3", и отношение между числом зубьев коронной шестерни R2 и числом зубьев солнечной шестерни S2 составляет "ρ4".
[0148] Фиг. 20 указывает частоты вращения вращающихся элементов первого дифференциального механизма PL1 и второго дифференциального механизма PL2 в HV-Lo-режиме гибридного транспортного средства, показанного на фиг. 18. Как показано на фиг. 20 HV-Lo-режим устанавливается посредством зацепления пятой муфты CL5 таким образом, что водило C1 первого дифференциального механизма PL1 и коронная шестерня R2 второго дифференциального механизма PL2 вращаются как единое целое. Помимо этого, водило C2 второго дифференциального механизма PL2 соединяется с коронной шестерней R1 первого дифференциального механизма PL1. В HV-Lo-режиме, в силу этого солнечная шестерня S1 первого дифференциального механизма PL1 служит в качестве входного элемента, солнечная шестерня S2 второго дифференциального механизма PL2 служит в качестве реактивного элемента, и коронная шестерня R2 второго дифференциального механизма PL2 служит в качестве выходного элемента. В HV-Lo-режиме, в частности, крутящий момент солнечной шестерни S1 первого дифференциального механизма PL1 доставляется в коронную шестерню R2 второго дифференциального механизма PL2. В HV-Lo-режиме, при условии, что крутящий момент двигателя, доставляемый в сторону первого электромотора 6, равен 1, отношение крутящего момента двигателя, доставляемого в коронную шестерню R2, может выражаться как "1+ρ3+(ρ3/ρ4)". Таким образом, в HV-Lo-режиме, отношение крутящего момента, доставленного от двигателя 5 в коронную шестерню R2, увеличивается по сравнению с отношением в HV-Hi-режиме.
[0149] Как описано выше, в гибридном транспортном средстве, показанном на фиг. 18, HV-режим устанавливается посредством зацепления любой из четвертой муфты CL4 и пятой муфты CL5. В гибридном транспортном средстве, показанном на фиг. 18, сохраняющая состояние муфта используется в качестве, по меньшей мере, одной из муфт, и в силу этого толчок, получающийся в результате возникновения неисправности в другой муфте, может уменьшаться.
[0150] Гибридное транспортное средство, показанное на фиг. 21, содержит третий дифференциальный механизм PL3, соединенный непосредственно с двигателем 5, и четвертый дифференциальный механизм PL4, соединенный непосредственно с первым электромотором 6.
[0151] Третий дифференциальный механизм PL3 также представляет собой планетарный зубчатый механизм односателлитного типа, содержащий: водило C3, соединенное с выходным валом 15 двигателя 5; солнечную шестерню S3; и коронную шестерню R3, соединенную с выходной шестерней 21. Выходная шестерня 21 также вводится в зацепление с ведомой шестерней 23, чтобы распределять крутящий момент на передние колеса 1R и 1L.
[0152] Четвертый дифференциальный механизм PL4 также представляет собой планетарный зубчатый механизм односателлитного типа, содержащий: коронную шестерню R4, соединенную с первым электромотором 6; водило C4, соединенное с солнечной шестерней S3 третьего дифференциального механизма PL3; и солнечную шестерню S4.
[0153] В четвертом дифференциальном механизме PL4, водило C4 и коронная шестерня R4 зацепляются между собой через шестую муфту CL6, чтобы вращать вращающиеся элементы четвертого дифференциального механизма PL4 как единое целое. Водило C3 третьего дифференциального механизма PL3 и солнечная шестерня S4 четвертого дифференциального механизма PL4 зацепляются между собой через седьмую муфту CL7. Тормоз B1 также расположен на выходном валу 15 двигателя 5. Например, фрикционная муфта и кулачковая муфта также могут использоваться отдельно в качестве муфт CL6 и CL7.
[0154] В гибридном транспортном средстве, показанном на фиг. 21, HV-Hi-режим, в котором отношение крутящего момента, доставляемого в коронную шестерню R3, является относительно небольшим, устанавливается посредством зацепления шестой муфты CL6, и HV-Lo-режим, в котором отношение крутящего момента, доставляемого в коронную шестерню R3, является относительно большим, устанавливается посредством зацепления седьмой муфты CL7.
[0155] Фиг. 22 указывает частоты вращения вращающихся элементов третьего дифференциального механизма PL3 и четвертого дифференциального механизма PL4 в HV-Hi-режиме гибридного транспортного средства, показанного на фиг. 21. Как показано на фиг. 22, HV-Hi-режим устанавливается посредством зацепления шестой муфты CL6 таким образом, что вращающиеся элементы в четвертом дифференциальном механизме PL4 вращаются как единое целое. Следовательно, крутящий момент первого электромотора 6 доставляется в водило C4 четвертого дифференциального механизма PL4 без изменения. В HV-Hi-режиме, крутящий момент двигателя 5 прикладывается к водилу C3 третьего дифференциального механизма PL3, и реактивный крутящий момент, устанавливаемый посредством первого электромотора 6, доставляется в солнечную шестерню S3 третьего дифференциального механизма PL3 через водило C4 четвертого дифференциального механизма PL4. Следовательно, крутящий момент доставляется из коронной шестерни R3 в выходную шестерню 21. Таким образом, в HV-Hi-режиме, водило C3 служит в качестве входного элемента, солнечная шестерня S3 служит в качестве реактивного элемента, и коронная шестерня R3 служит в качестве выходного элемента. В гибридном транспортном средстве, показанном на фиг. 21, при условии, что крутящий момент двигателя, доставляемый в сторону первого электромотора 6, равен 1, отношение крутящего момента, прикладываемого к коронной шестерне R3 в HV-Hi-режиме, может выражаться как "1/ρ5", где ρ5 представляет собой отношение между числом зубьев коронной шестерни R3 и числом зубьев солнечной шестерни S3.
[0156] Фиг. 23 указывает частоты вращения вращающихся элементов третьего дифференциального механизма PL3 и четвертого дифференциального механизма PL4 в HV-Lo-режиме гибридного транспортного средства, показанного на фиг. 21. Как показано на фиг. 23, HV-Lo-режим устанавливается посредством зацепления седьмой муфты CL7 таким образом, что водило C3 третьего дифференциального механизма PL3 и солнечная шестерня S4 четвертого дифференциального механизма PL4 вращаются как единое целое. Помимо этого, солнечная шестерня S3 третьего дифференциального механизма PL3 соединяется с водилом C4 четвертого дифференциального механизма PL4. В HV-Lo-режиме, в силу этого водило C3 третьего дифференциального механизма PL3 служит в качестве входного элемента, коронная шестерня R4 четвертого дифференциального механизма PL4 служит в качестве реактивного элемента, и коронная шестерня R3 третьего дифференциального механизма PL3 служит в качестве выходного элемента. В HV-Lo-режиме, в частности, крутящий момент водила C3 третьего дифференциального механизма PL3 доставляется в коронную шестерню R3 третьего дифференциального механизма PL3. В HV-Lo-режиме, при условии, что крутящий момент двигателя, доставляемый в сторону первого электромотора 6, равен 1, отношение крутящего момента двигателя, доставляемого в коронную шестерню R3, может выражаться как "(1+ρ6)/ρ5", где ρ6 представляет собой отношение между числом зубьев коронной шестерни R4 и числом зубьев солнечной шестерни S4. Таким образом, в HV-Lo-режиме, отношение крутящего момента, доставленного от двигателя 5 в коронную шестерню R3, увеличивается по сравнению с отношением в HV-Hi-режиме. Помимо этого, при условии, что частота вращения первого электромотора 6 равна 0, коэффициент уменьшения частоты вращения между частотами вращения двигателя 5 и коронной шестерни R3 в HV-Lo-режиме превышает коэффициент уменьшения частоты вращения в HV-Hi-режиме.
[0157] Как описано выше, в гибридном транспортном средстве, показанном на фиг. 21, HV-режим устанавливается посредством зацепления любой из шестой муфты CL6 и седьмой муфты CL7. В гибридном транспортном средстве, показанном на фиг. 21, сохраняющая состояние муфта используется в качестве, по меньшей мере, одной из муфт, и в силу этого толчок, получающийся в результате возникновения неисправности в другой муфте, может уменьшаться.
[0158] Таким образом, в гибридных транспортных средствах, показанных на фиг. 1, 18 и 21, первый дифференциальный механизм выполнен с возможностью выполнять дифференциальное действие между первым вращающимся элементом, соединенным с двигателем; вторым вращающимся элементом, соединенным с электромотором; и третьим вращающимся элементом, соединенным с ведущими колесами. Второй дифференциальный механизм также выполнен с возможностью выполнять дифференциальное действие между: четвертым вращающимся элементом; пятым вращающимся элементом, соединенным с третьим вращающимся элементом; и шестым вращающимся элементом. Каждое из гибридных транспортных средств отдельно содержит: первое зацепляющее устройство, которое избирательно соединяет шестой вращающийся элемент с первым вращающимся элементом или вторым вращающимся элементом; и второе зацепляющее устройство, которое избирательно соединяет любые два из первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента или соединяет любые два из четвертого вращающегося элемента, пятого вращающегося элемента и шестого вращающегося элемента. В гибридных транспортных средствах, первый режим (т.е. HV-Lo-режим), в котором коэффициент распределения крутящего момента является относительно большим, устанавливается посредством зацепления любого из первого зацепляющего устройства и второго зацепляющего устройства, и второй режим (т.е. HV-Hi-режим), в котором коэффициент распределения крутящего момента является относительно небольшим, устанавливается посредством зацепления другого из первого зацепляющего устройства и второго зацепляющего устройства.
[0159] Конструкция первого зацепляющего устройства и второго зацепляющего устройства не должна быть ограничена вышеприведенным вариантом осуществления. Фиг. 24 показывает пример транспортного средства, в котором рабочий режим переключается между фиксированным режимом, в котором отношение частот вращения между двигателем 5 и передними колесами 1R, 1L является постоянным, и бесступенчатым режимом, в котором отношение частот вращения между двигателем 5 и передними колесами 1R, 1L варьируется непрерывно.
[0160] В транспортном средстве, показанном на фиг. 24, трансмиссионный механизм D содержит три набора планетарного зубчатого механизма PL5, PL6 и PL7 односателлитного типа. В первом планетарном зубчатом механизме PL5 (в дальнейшем называется "пятым дифференциальным механизмом"), коронная шестерня R5 соединяется с двигателем 5, и солнечная шестерня S5 соединяется с первым электромотором 6. Второй планетарный зубчатый механизм PL6 (в дальнейшем называется "шестым дифференциальным механизмом") располагается на противоположной стороне двигателя 5 вдоль пятого дифференциального механизма PL5. В шестом дифференциальном механизме PL6, коронная шестерня R6 соединяется с первым электромотором 6 и солнечной шестерней S5 пятого дифференциального механизма PL5, и водило C6 соединяется с водилом C5 пятого дифференциального механизма PL5. Третий планетарный зубчатый механизм PL7 (в дальнейшем называется "седьмым дифференциальным механизмом") располагается на противоположной стороне пятого дифференциального механизма PL5 вдоль шестого дифференциального механизма PL6. В седьмом дифференциальном механизме PL7, солнечная шестерня S7 соединяется с солнечной шестерней S6 шестого дифференциального механизма PL6, и водило C7 соединяется с выходным компонентом O. Второй электромотор 7 соединяется с солнечной шестерней S6 шестого дифференциального механизма PL6 и солнечной шестерней S7 седьмого дифференциального механизма PL7.
[0161] Водило C6 шестого дифференциального механизма PL6 избирательно соединяется с солнечной шестерней S6 шестого дифференциального механизма PL6 или солнечной шестерней S7 седьмого дифференциального механизма PL7 через восьмую муфту CL8. Водило C5 пятого дифференциального механизма PL5 избирательно соединяется с водилом C7 седьмого дифференциального механизма PL7 через девятую муфту CL9. Коронная шестерня R7 седьмого дифференциального механизма PL7 избирательно соединяется с кожухом C через третий тормоз B3. Солнечная шестерня S6 шестого дифференциального механизма PL6 и солнечная шестерня S7 седьмого дифференциального механизма PL7 избирательно соединяются с кожухом C через четвертый тормоз B4. Например, фрикционное зацепляющее устройство или кулачковая муфта может использоваться отдельно в качестве восьмой муфты CL8, девятой муфты CL9, третьего тормоза B3 и четвертого тормоза B4. В транспортном средстве, показанном на фиг. 24, солнечная шестерня S6 шестого дифференциального механизма PL6, солнечная шестерня S7 седьмого дифференциального механизма PL7 или коронная шестерня R7 седьмого дифференциального механизма PL7 служат в качестве первого реактивного элемента и второго реактивного элемента. Помимо этого, восьмая муфта CL8, девятая муфта CL9, третий тормоз B3 и четвертый тормоз B4 служат в качестве первого зацепляющего устройства и второго зацепляющего устройства.
[0162] Фиг. 25 показывает состояния зацепления восьмой муфты CL8, девятой муфты CL9, третьего тормоза B3 и четвертого тормоза B4 в каждом рабочем режиме транспортного средства, показанного на фиг. 24. На фиг. 25, "O" представляет то, что зацепляющее устройство находится в зацеплении, и "-" представляет то, что зацепляющее устройство находится в расцеплении. Как показано на фиг. 25, в транспортном средстве, показанном на фиг. 24: первый режим устанавливается посредством зацепления только третьего тормоза B3; второй режим устанавливается посредством зацепления третьего тормоза B3 и восьмой муфты CL8; третий режим устанавливается посредством зацепления третьего тормоза B3 и девятой муфты CL9; четвертый режим устанавливается посредством зацепления только девятой муфты CL9; пятый режим устанавливается посредством зацепления восьмой муфты CL8 и девятой муфты CL9; и шестой режим устанавливается посредством зацепления девятой муфты CL9 и четвертого тормоза B4.
[0163] Фиг. 26 указывает частоты вращения вращающихся элементов трансмиссионного механизма D и направления крутящих моментов двигателя 5, первого электромотора 6 и второго электромотора 7 в первом режиме. В первом режиме, поскольку третий тормоз B3 находится в зацеплении, частота вращения солнечной шестерни S7 седьмого дифференциального механизма PL7 поддерживается в соответствии со скоростью транспортного средства. В этой ситуации, движущий крутящий момент, сформированный посредством второго электромотора 7, доставляется в водило C7 при умножении посредством установления силы реакции посредством третьего тормоза B3. В транспортном средстве, показанном на фиг. 24, частота вращения двигателя 5 также может варьироваться непрерывно посредством управления частотой вращения первого электромотора 6. В силу этого, в этой ситуации, крутящий момент двигателя 5 доставляется в водило C7 седьмого дифференциального механизма PL7 посредством управления частотой вращения первого электромотора 6 оптимизированным топливоэкономичным способом при установлении реактивного крутящего момента посредством первого электромотора 6. Таким образом, первый режим представляет собой бесступенчатый режим, в котором отношение частот вращения между двигателем 5 и передними колесами 1R, 1L может варьироваться непрерывно.
[0164] Фиг. 27 указывает частоты вращения вращающихся элементов трансмиссионного механизма D и направления крутящих моментов двигателя 5, первого электромотора 6 и второго электромотора 7 во втором режиме. Во втором режиме, поскольку третий тормоз B3 находится в зацеплении, частота вращения солнечной шестерни S7 седьмого дифференциального механизма PL7 также поддерживается в соответствии со скоростью транспортного средства, и второй электромотор 7 формирует движущий крутящий момент. В этой ситуации, поскольку восьмая муфта CL8 также находится в зацеплении, вращающиеся элементы в пятом дифференциальном механизме PL5 и шестом дифференциальном механизме PL6 вращаются как единое целое таким образом, что частота вращения двигателя 5 поддерживается в соответствии со скоростью транспортного средства. Таким образом, второй режим представляет собой фиксированный режим, в котором отношение частот вращения между двигателем 5 и передними колесами 1R, 1L является постоянным. Во втором режиме, реактивный крутящий момент, чтобы доставлять выходной крутящий момент двигателя 5 на передние колеса 1R, 1L, устанавливается посредством третьего тормоза B3. Таким образом, выходной крутящий момент двигателя 5 может доставляться в водило C7 седьмого дифференциального механизма PL7 без установления реактивного крутящего момента посредством первого электромотора 6.
[0165] Фиг. 28 указывает частоты вращения вращающихся элементов трансмиссионного механизма D и направления крутящих моментов двигателя 5, первого электромотора 6 и второго электромотора 7 в третьем режиме. В третьем режиме, поскольку третий тормоз B3 и девятая муфта CL9 зацепляются, вращающиеся элементы в дифференциальных механизмах PL5, PL6 и PL7 вращаются с частотами ращения, регулируемыми посредством скорости транспортного средства и передаточных отношений дифференциальных механизмов PL5, PL6 и PL7. В силу этого, в третьем режиме, частота вращения двигателя 5 также поддерживается в соответствии со скоростью транспортного средства. Таким образом, третий режим также представляет собой фиксированный режим, в котором отношение частот вращения между двигателем 5 и передними колесами 1R, 1L является постоянным. В третьем режиме, реактивный крутящий момент, чтобы доставлять выходной крутящий момент двигателя 5 на передние колеса 1R, 1L, также устанавливается посредством третьего тормоза B3. Таким образом, выходной крутящий момент двигателя 5 может доставляться в водило C7 седьмого дифференциального механизма PL7 без установления реактивного крутящего момента посредством первого электромотора 6. Помимо этого, в третьем режиме, второй электромотор 7 может формировать движущий крутящий момент согласно потребности.
[0166] Фиг. 29 указывает частоты вращения вращающихся элементов трансмиссионного механизма D и направления крутящих моментов двигателя 5, первого электромотора 6 и второго электромотора 7 в четвертом режиме. Как описано выше, в четвертом режиме, только девятая муфта CL9 находится в зацеплении. В четвертом режиме, в силу этого частоты вращения вращающихся элементов регулируются посредством скорости транспортного средства и частоты вращения любого из вращающихся элементов. Как описано выше, частота вращения двигателя 5 управляется оптимизированным топливоэкономичным способом посредством управления частотой вращения первого электромотора 6. Таким образом, четвертый первый режим режима также представляет собой бесступенчатый режим, в котором отношение частот вращения между двигателем 5 и передними колесами 1R, 1L может варьироваться непрерывно. В четвертом режиме, крутящий момент двигателя 5 доставляется на передние колеса 1R, 1L посредством установления реактивного крутящего момента посредством первого электромотора 6. Помимо этого, в четвертом режиме, второй электромотор 7 может формировать движущий крутящий момент согласно потребности.
[0167] Фиг. 30 указывает частоты вращения вращающихся элементов трансмиссионного механизма D и направления крутящих моментов двигателя 5, первого электромотора 6 и второго электромотора 7 в пятом режиме. В пятом режиме, поскольку восьмая муфта CL8 и девятая муфта CL9 зацепляются, вращающиеся элементы в дифференциальных механизмах PL5, PL6 и PL7 вращаются как единое целое таким образом, что частота вращения двигателя 5 поддерживается в соответствии со скоростью транспортного средства. Таким образом, пятый режим также представляет собой фиксированный режим, в котором равно 1 отношение частот вращения между двигателем 5 и передними колесами 1R, 1L. В пятом режиме, в принципе, необязательно устанавливать реактивный крутящий момент посредством первого электромотора 6, чтобы доставлять выходной крутящий момент двигателя 5 на передние колеса 1R, 1L. В пятом режиме, в силу этого транспортное средство приводится в движение только посредством движущего крутящего момента, сформированного посредством двигателя 5 в принципе.
[0168] Фиг. 31 указывает частоты вращения вращающихся элементов трансмиссионного механизма D и направления крутящих моментов двигателя 5, первого электромотора 6 и второго электромотора 7 в шестом режиме. В шестом режиме, поскольку четвертый тормоз B4 и девятая муфта CL9 зацепляются, вращающиеся элементы в дифференциальных механизмах PL5, PL6 и PL7 вращаются с частотами ращения, регулируемыми посредством скорости транспортного средства и передаточных отношений дифференциальных механизмов PL5, PL6 и PL7. В шестом режиме, в силу этого частота вращения двигателя 5 также поддерживается в соответствии со скоростью транспортного средства. Таким образом, шестой режим также представляет собой фиксированный режим, в котором отношение частот вращения между двигателем 5 и передними колесами 1R, 1L является постоянным. В шестом режиме, реактивный крутящий момент, чтобы доставлять выходной крутящий момент двигателя 5 на передние колеса 1R, 1L, устанавливается посредством четвертого тормоза B4. Таким образом, выходной крутящий момент двигателя 5 может доставляться в водило C7 седьмого дифференциального механизма PL7 без установления реактивного крутящего момента посредством первого электромотора 6.
[0169] Таким образом, в транспортном средстве, показанном на фиг. 24, HV-режим устанавливается посредством зацепления любого одного или двух из восьмой муфты CL8, девятой муфты CL9, третьего тормоза B3 и четвертого тормоза B4. В гибридном транспортном средстве, показанном на фиг. 24, сохраняющая состояние муфта используется в качестве, по меньшей мере, одной из муфт, и в силу этого толчок, получающийся в результате возникновения неисправности в другой муфте, может уменьшаться.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ТРАНСМИССИЕЙ ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2698607C1 |
| Модуль привода для гибридного транспортного средства | 2018 |
|
RU2683136C1 |
| УСТРОЙСТВО ПРИВЕДЕНИЯ В ДВИЖЕНИЕ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2585501C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ МОЩНОСТИ | 2019 |
|
RU2699515C1 |
| Устройство адаптивного управления для пусковой муфты транспортного средства | 2014 |
|
RU2644492C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2527653C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2668448C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ АВТОМАТИЧЕСКОЙ ТРАНСМИССИИ | 2013 |
|
RU2643901C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА С ЭЛЕКТРОПРИВОДОМ | 2014 |
|
RU2659151C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2627238C1 |
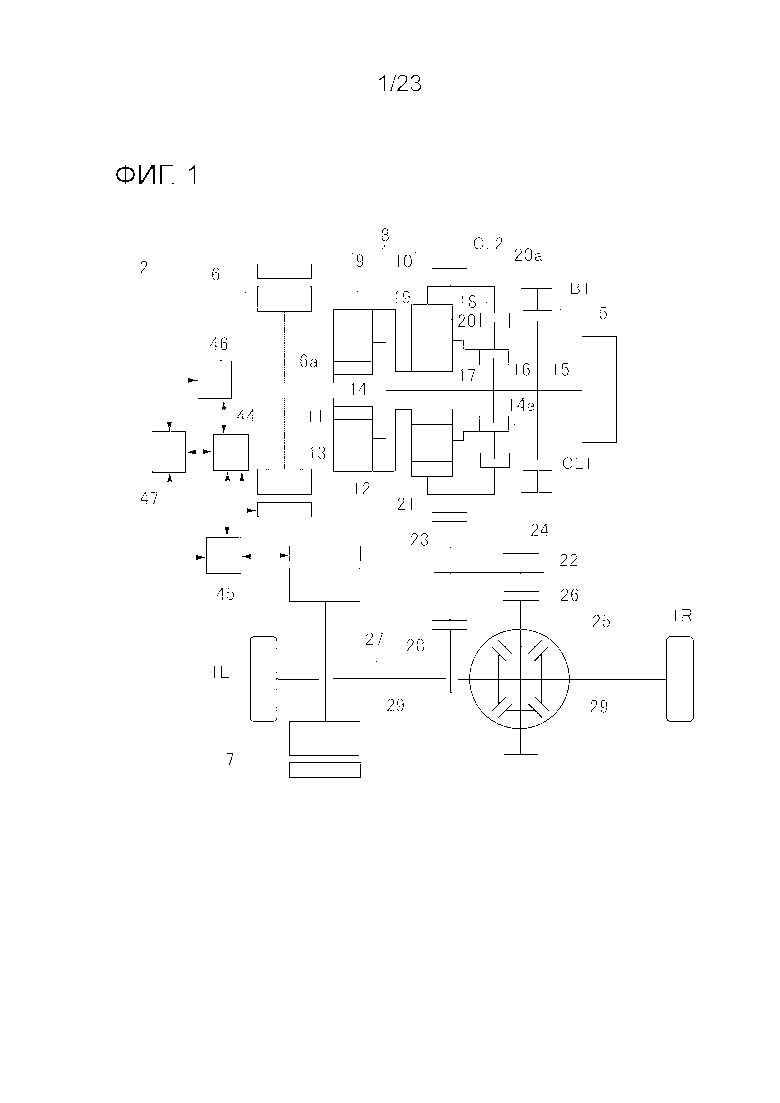
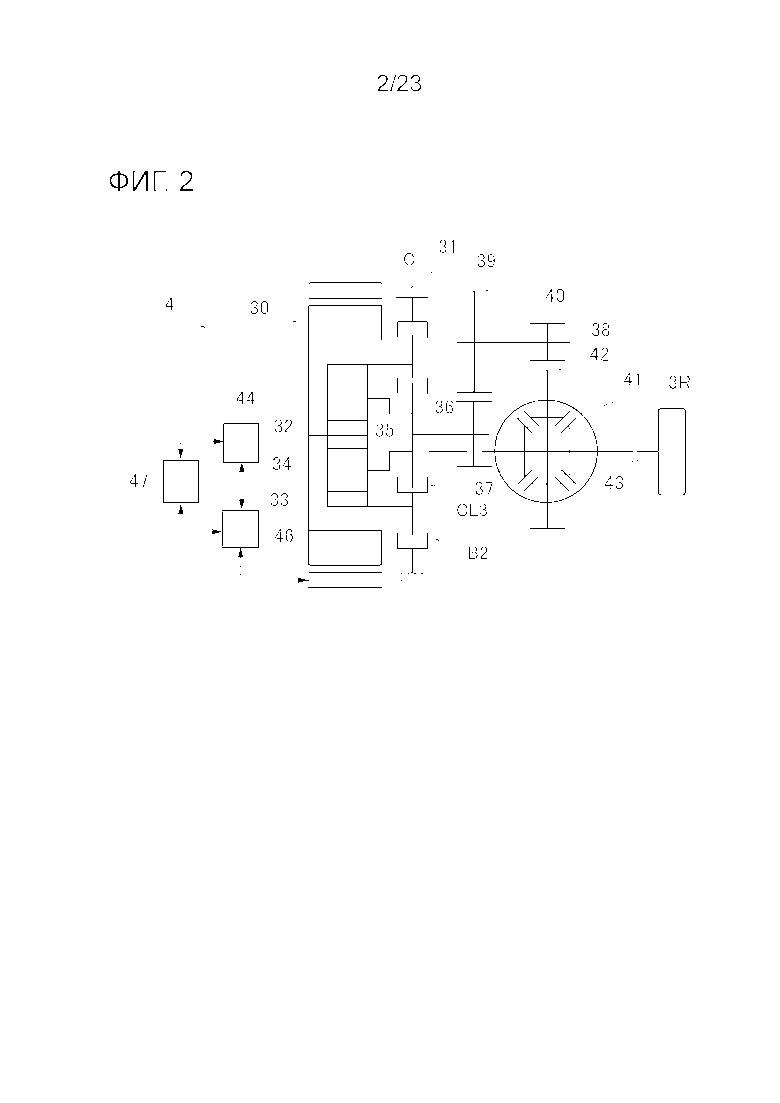
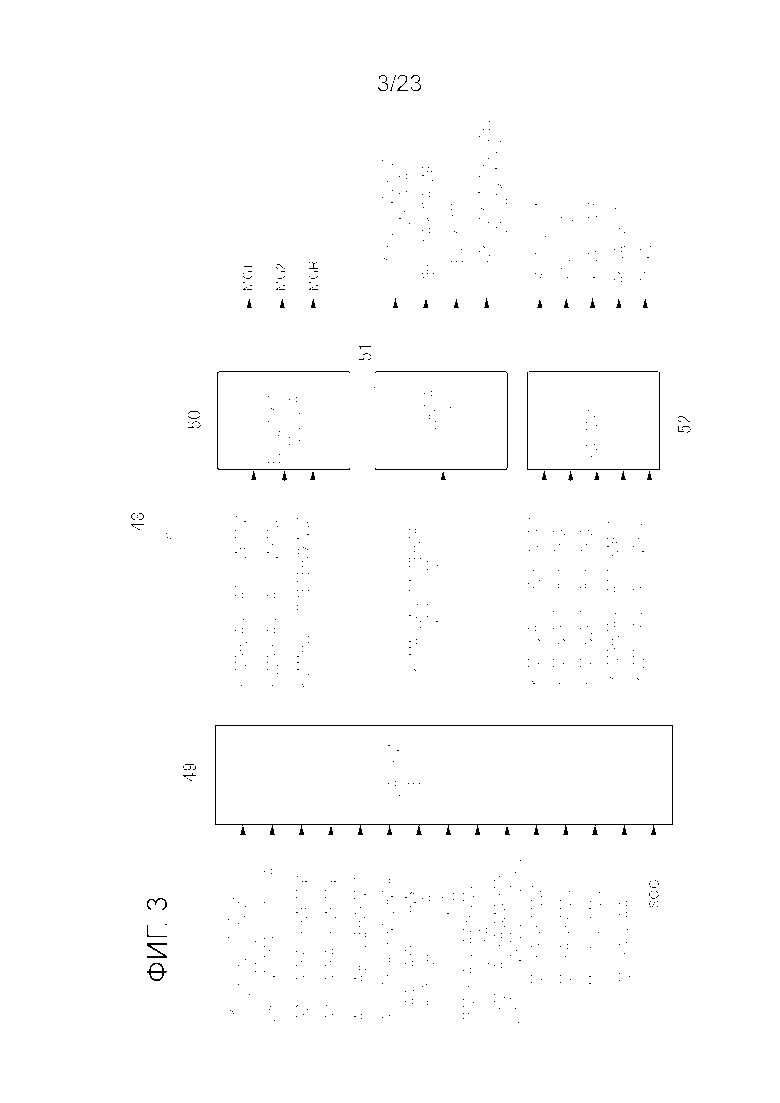
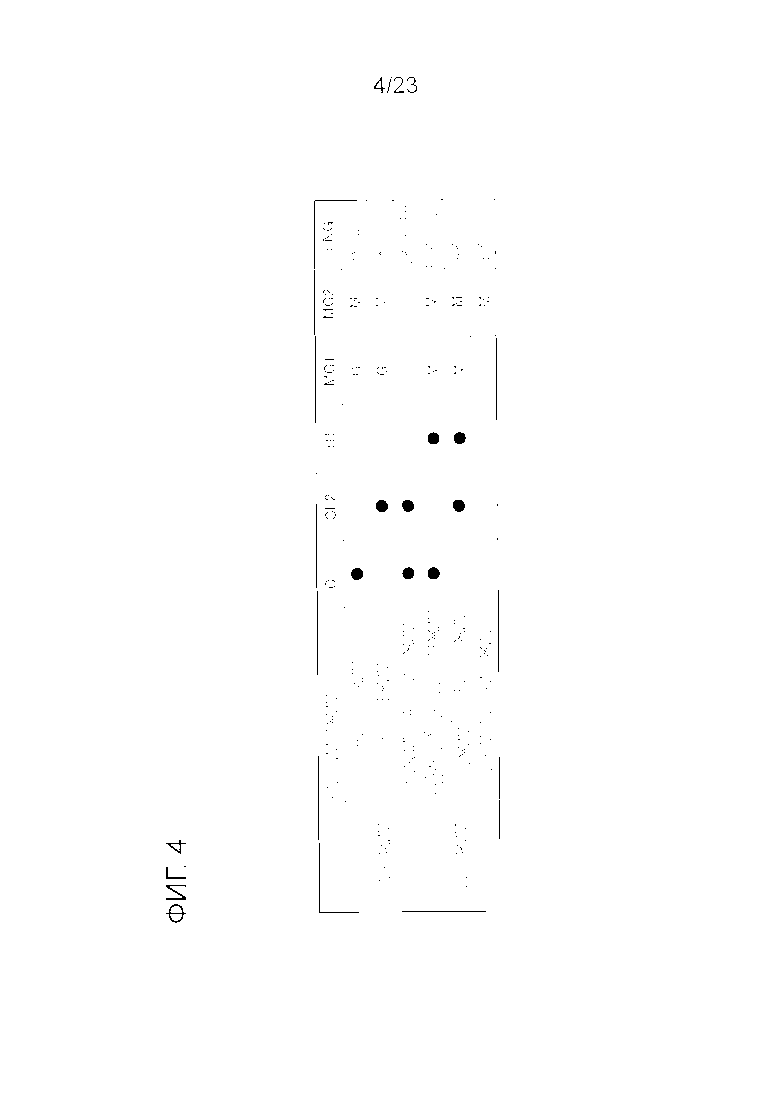
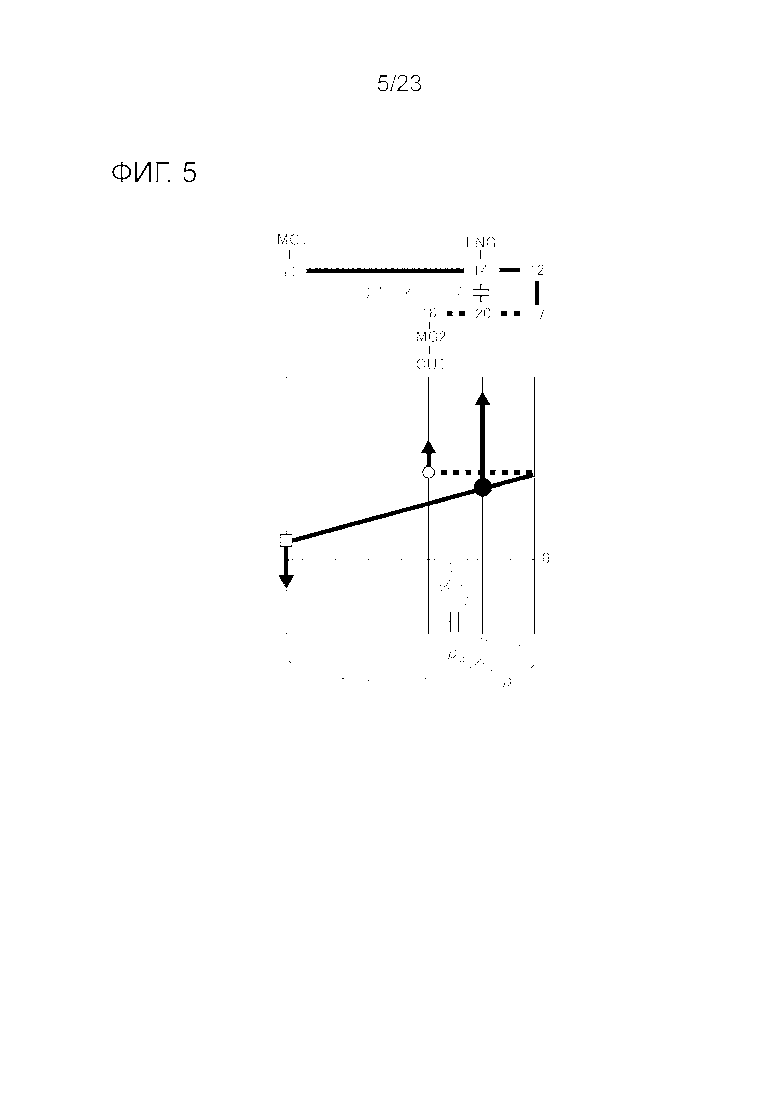
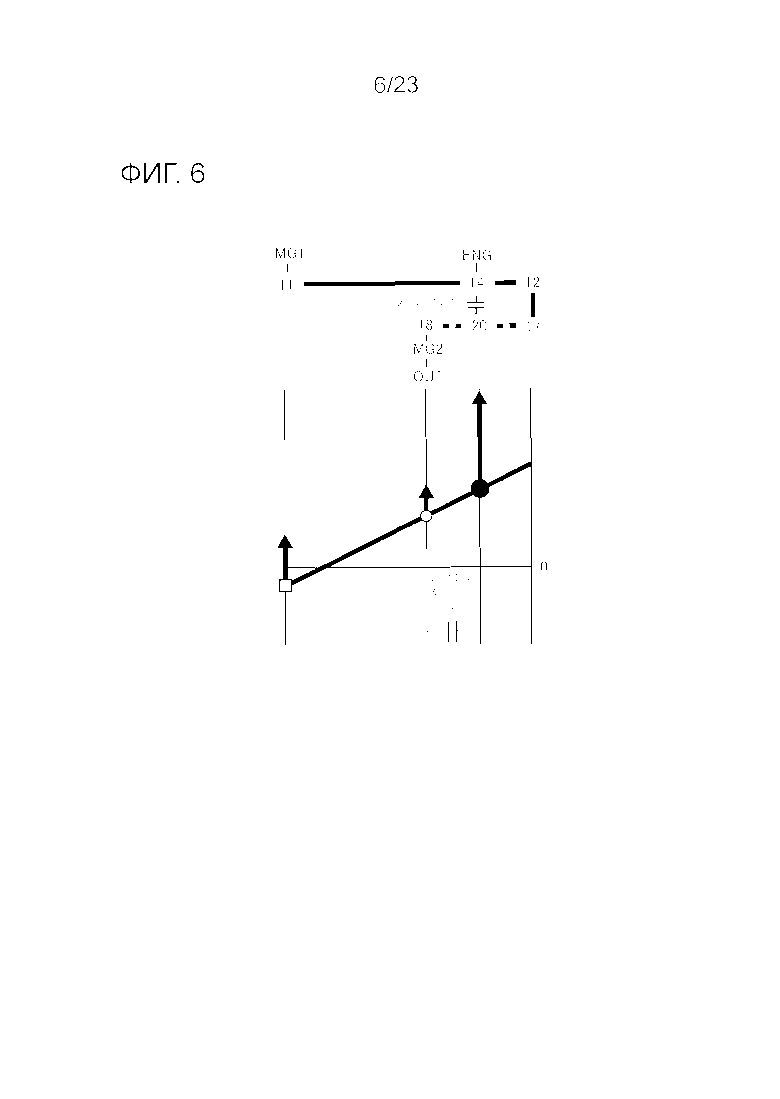
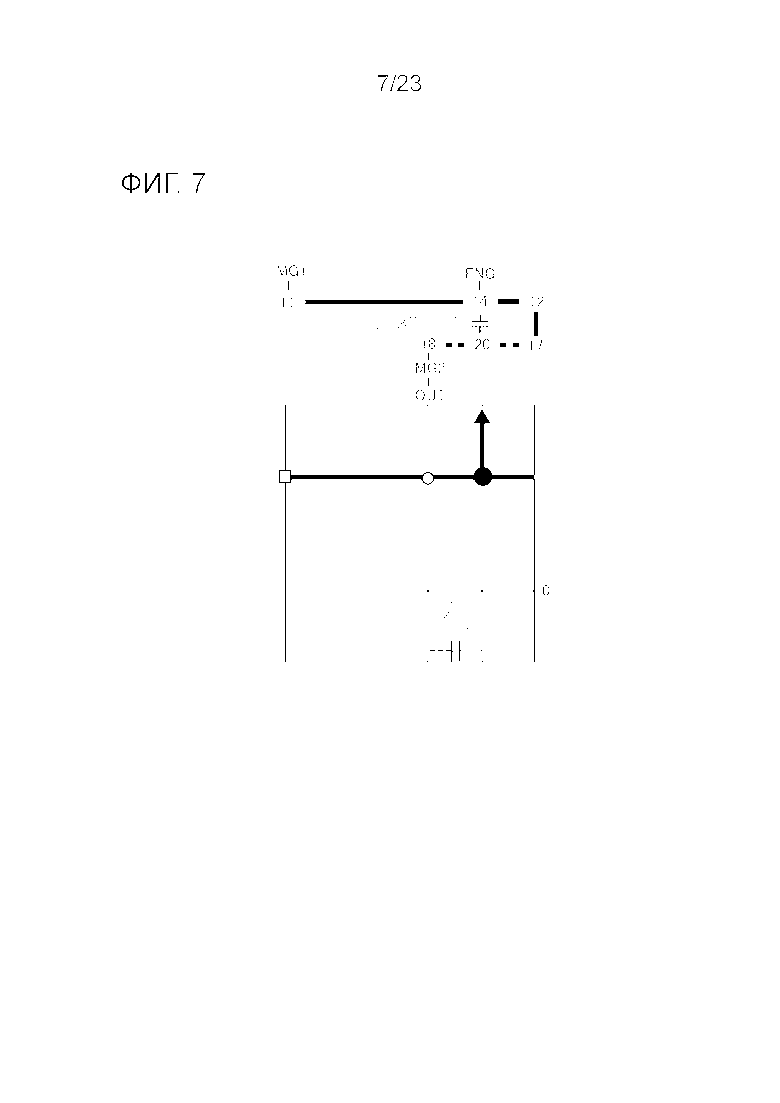
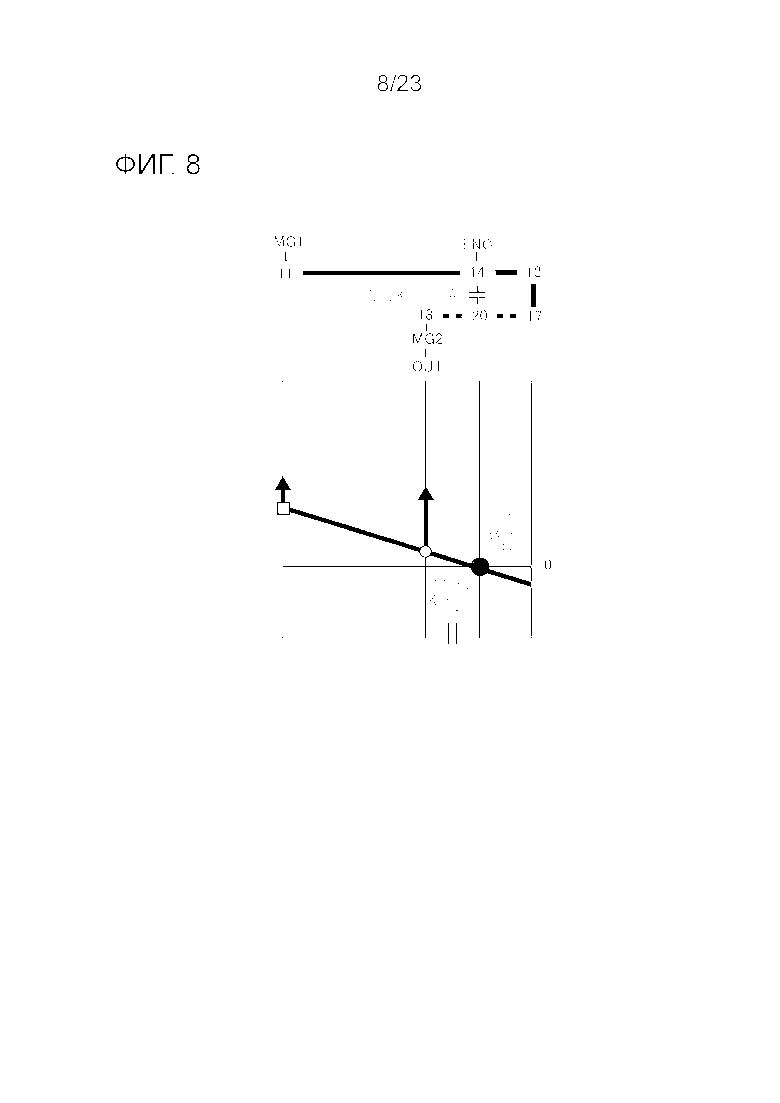
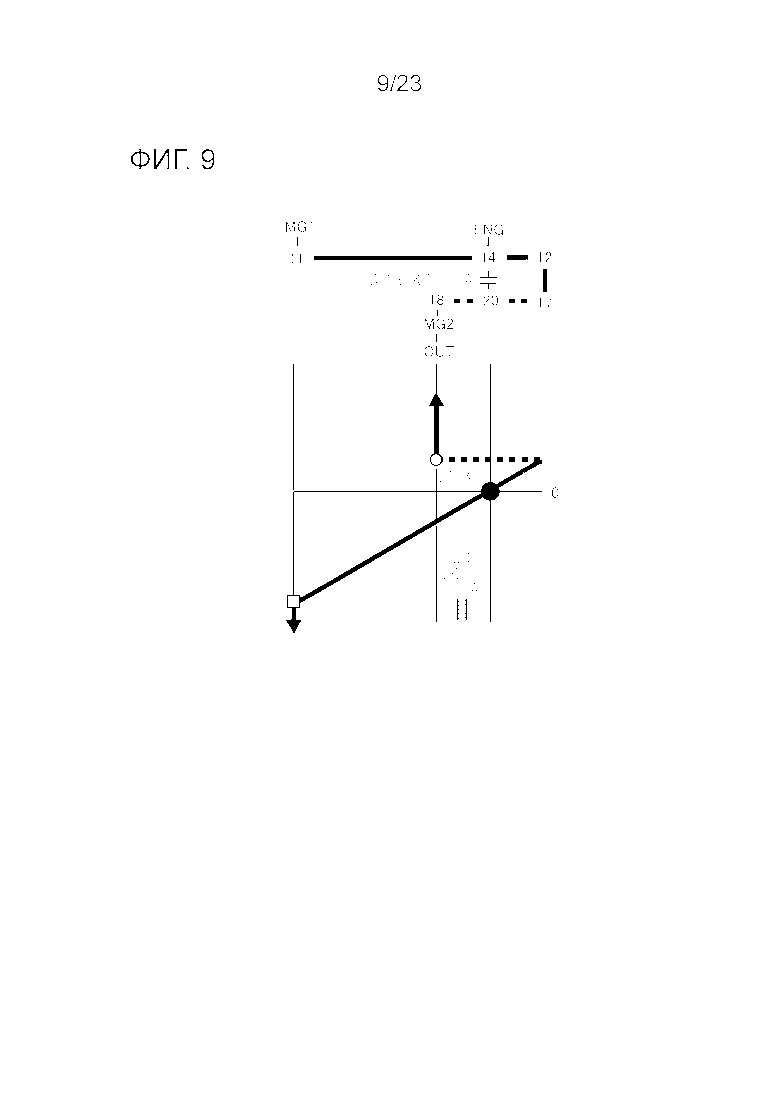
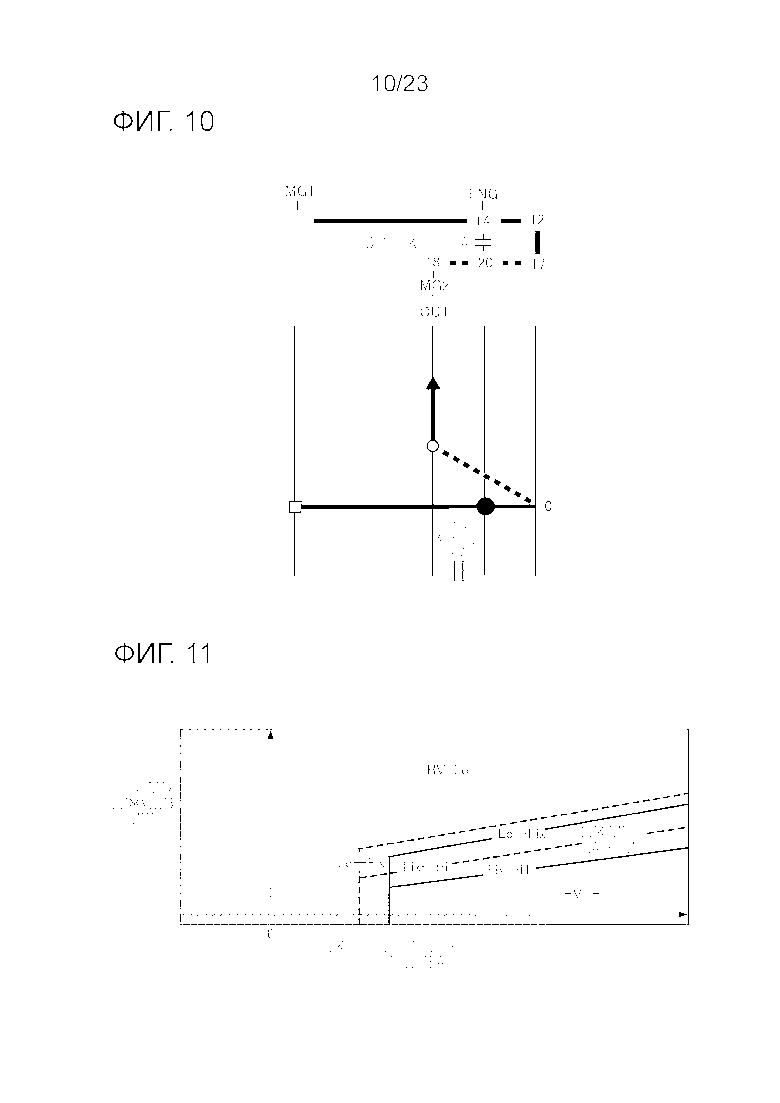
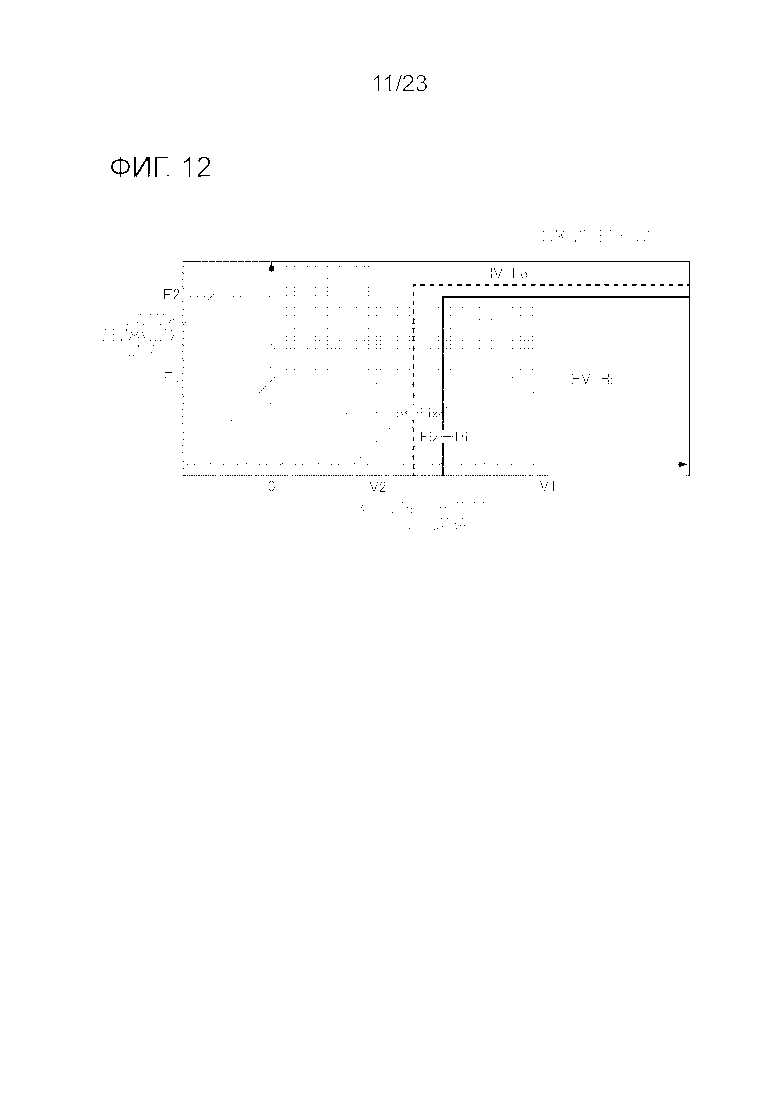
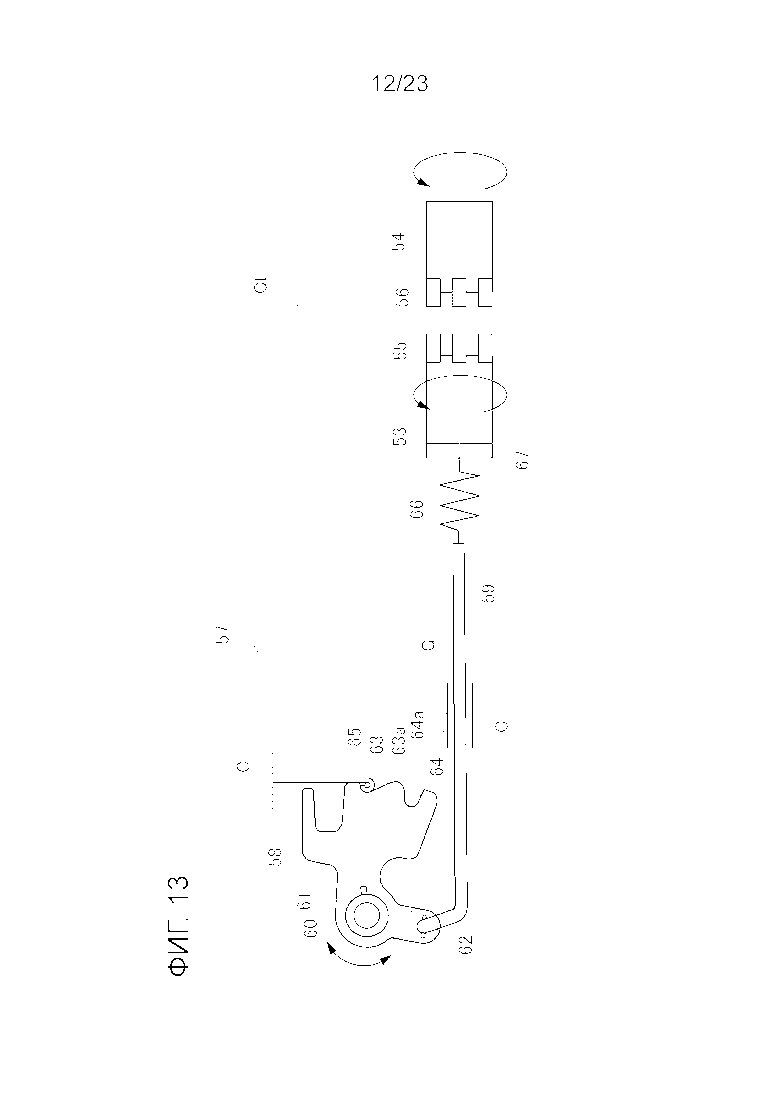
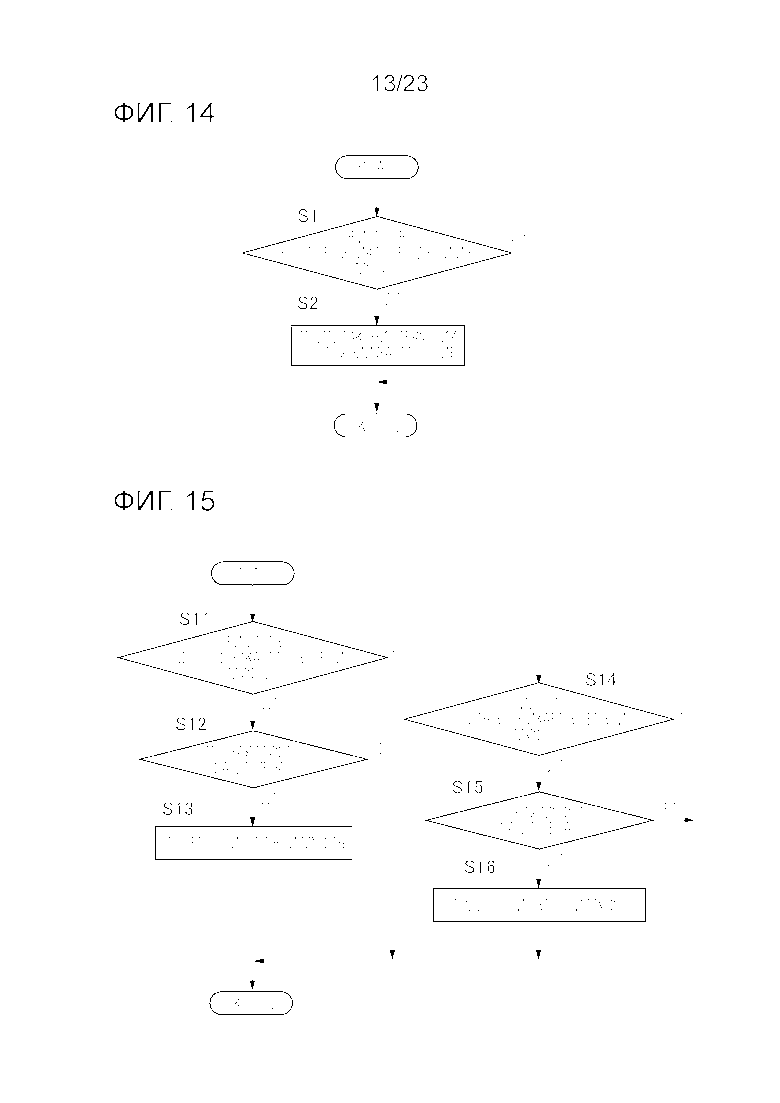
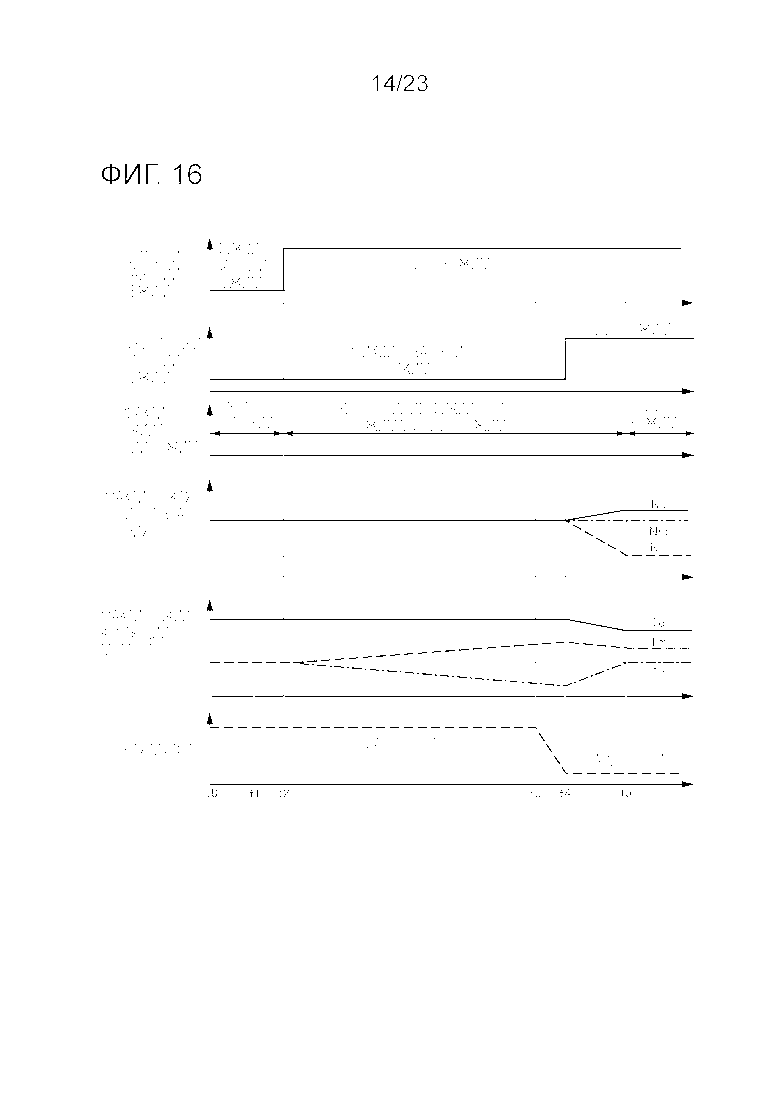
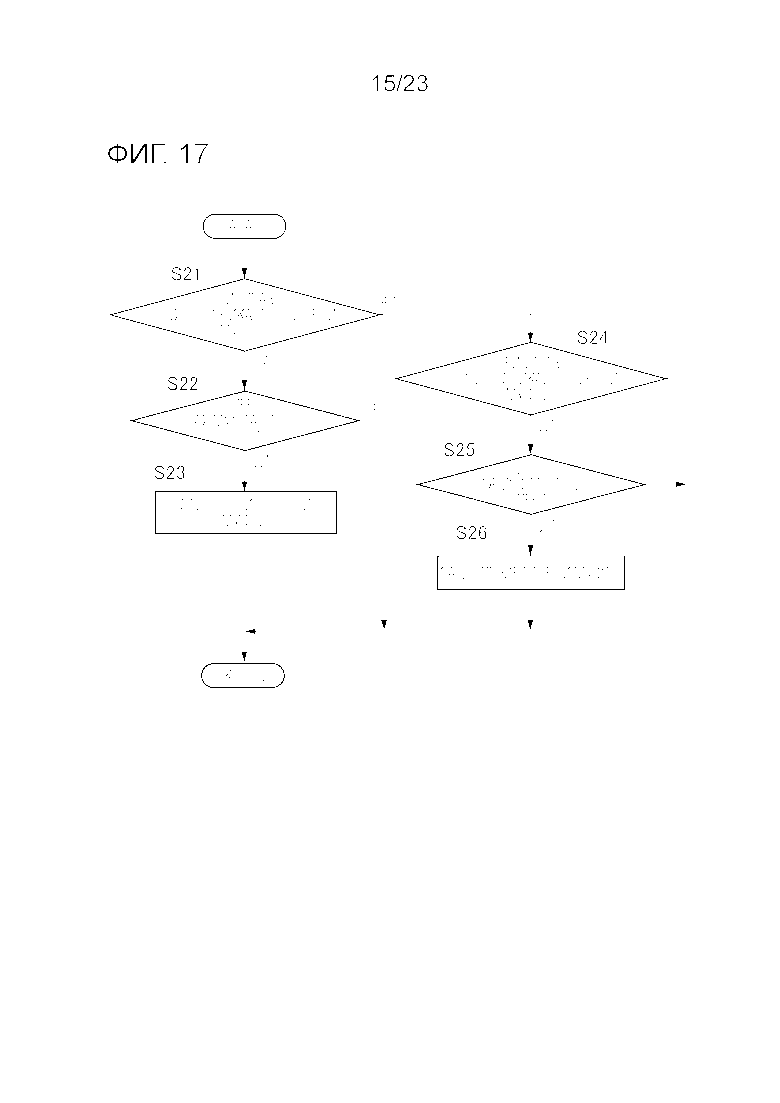
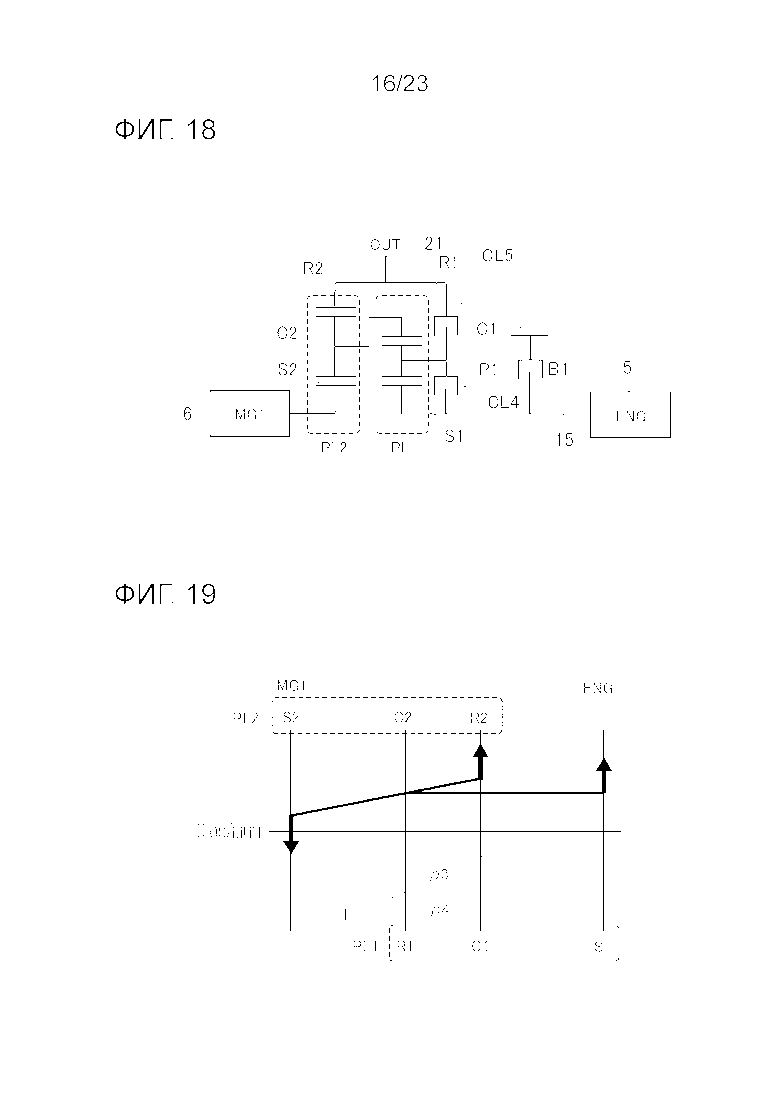
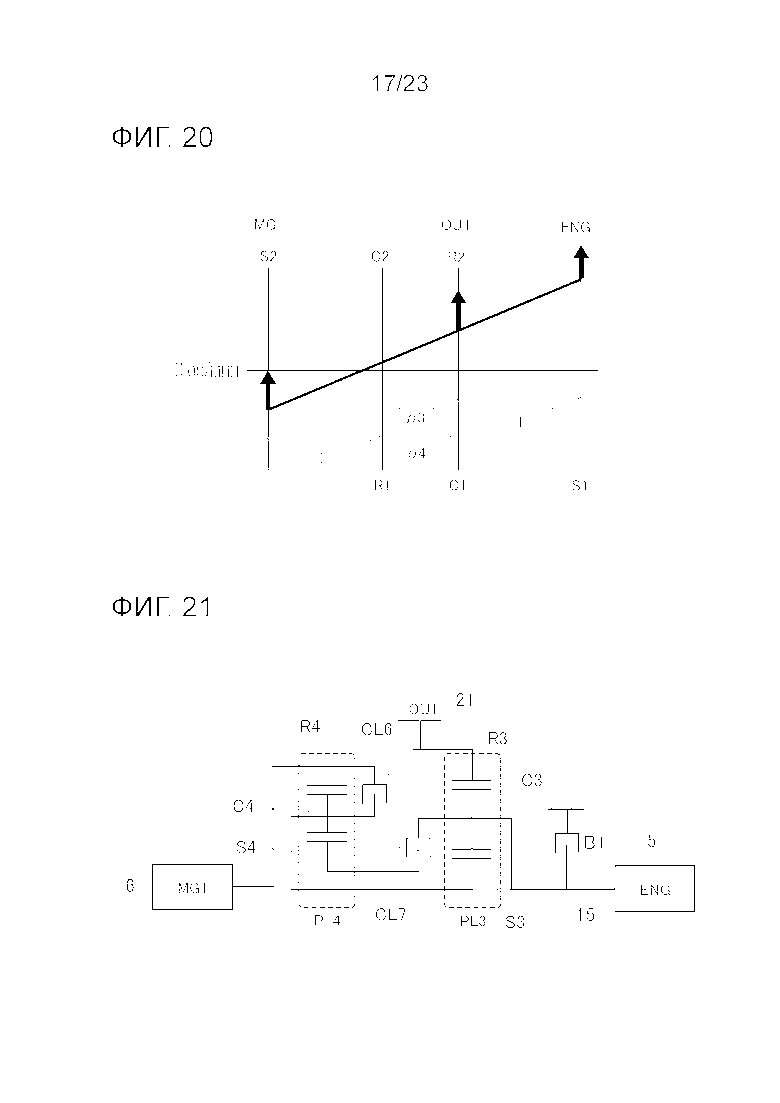
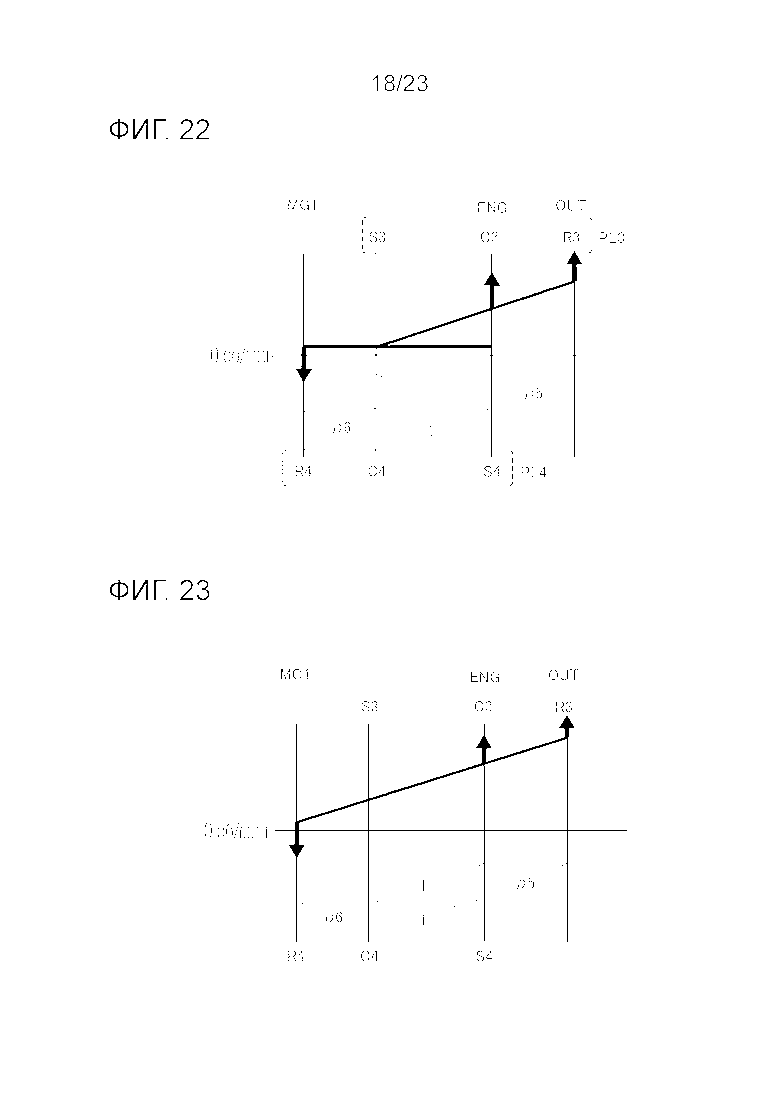
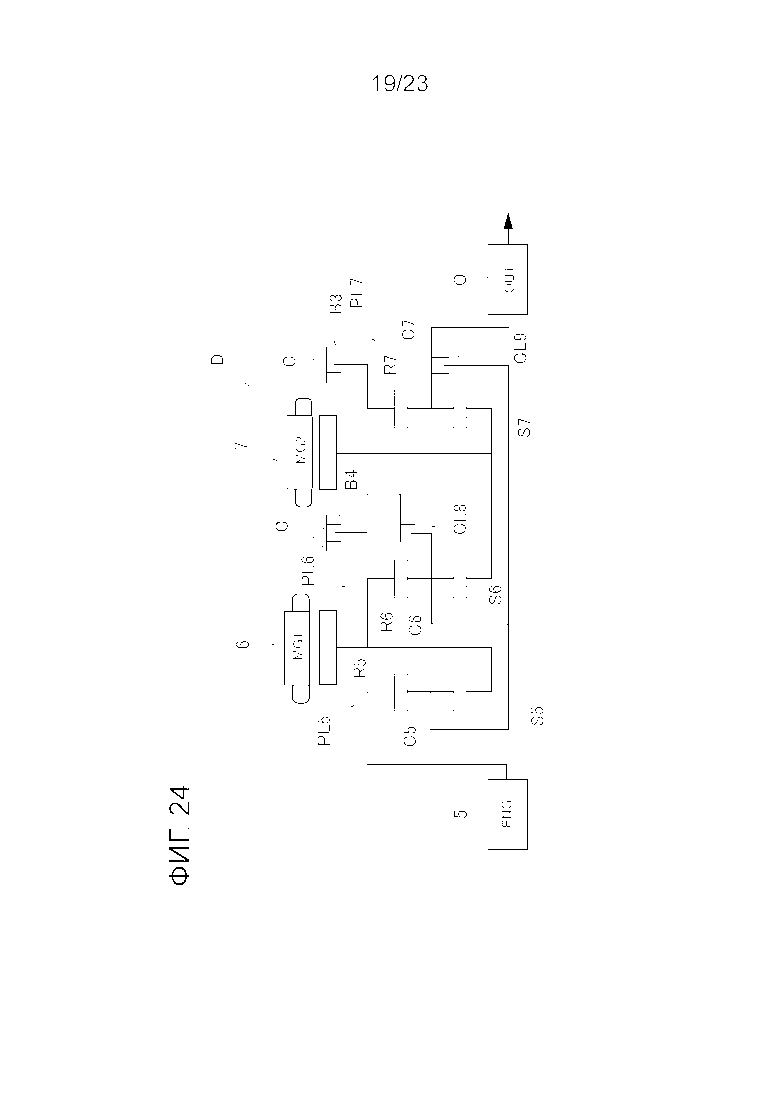
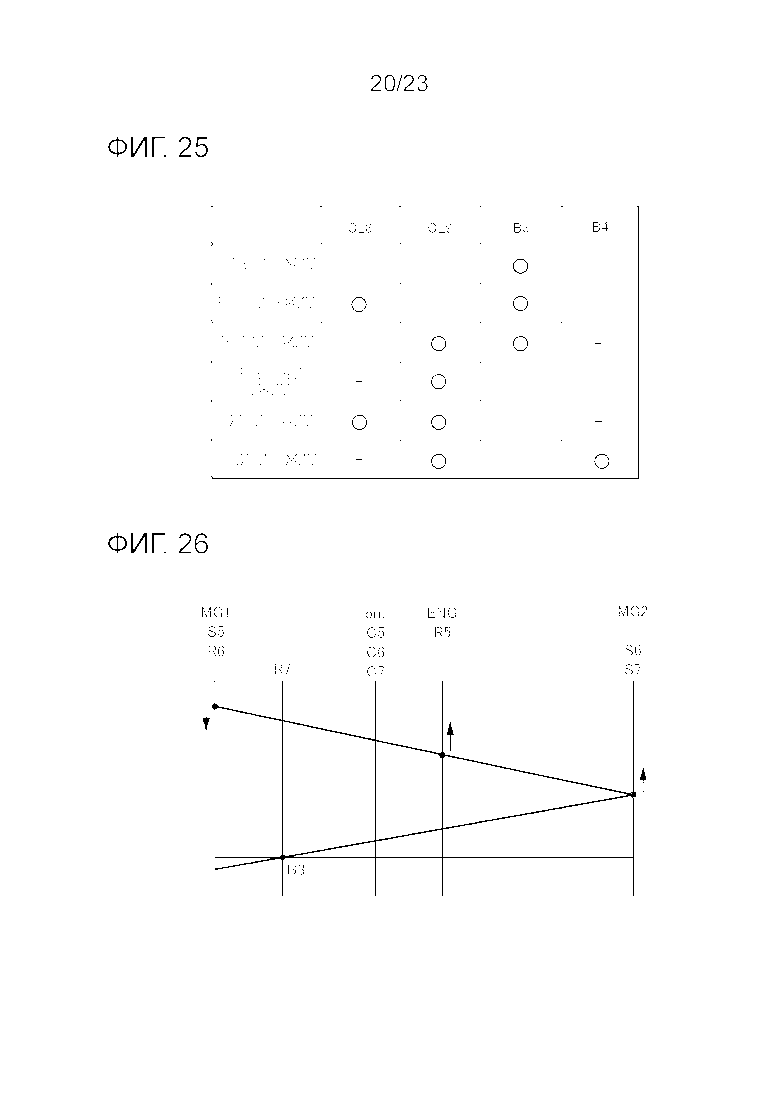
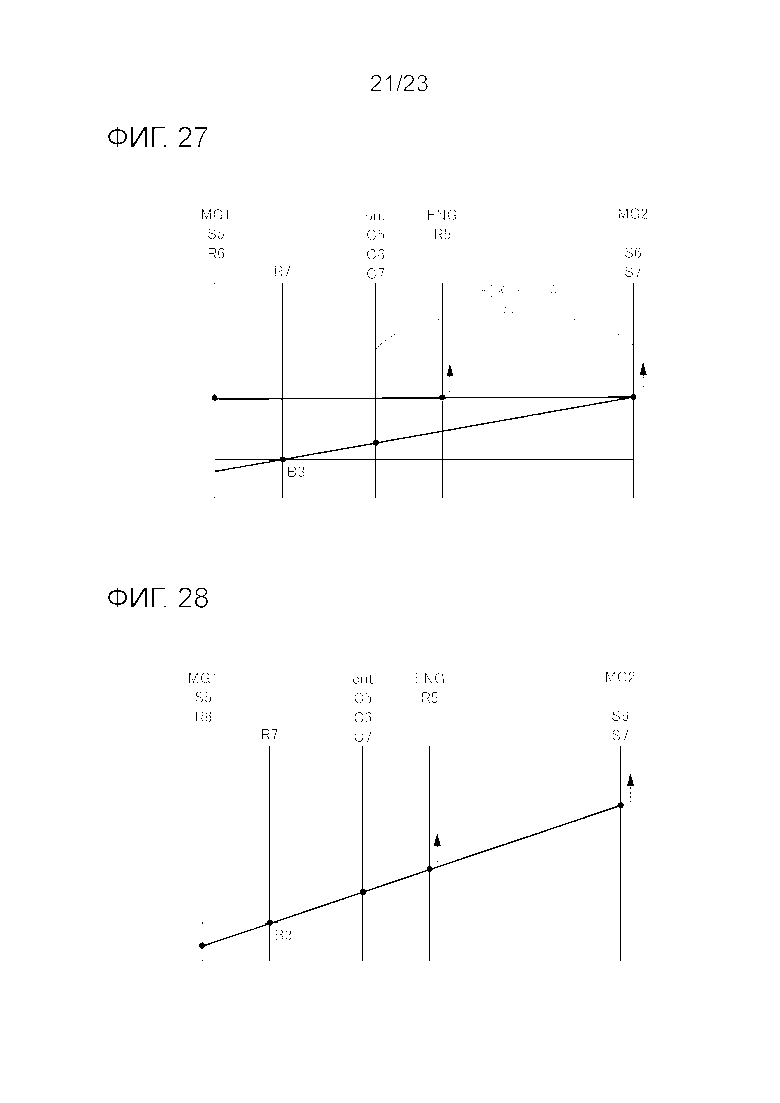
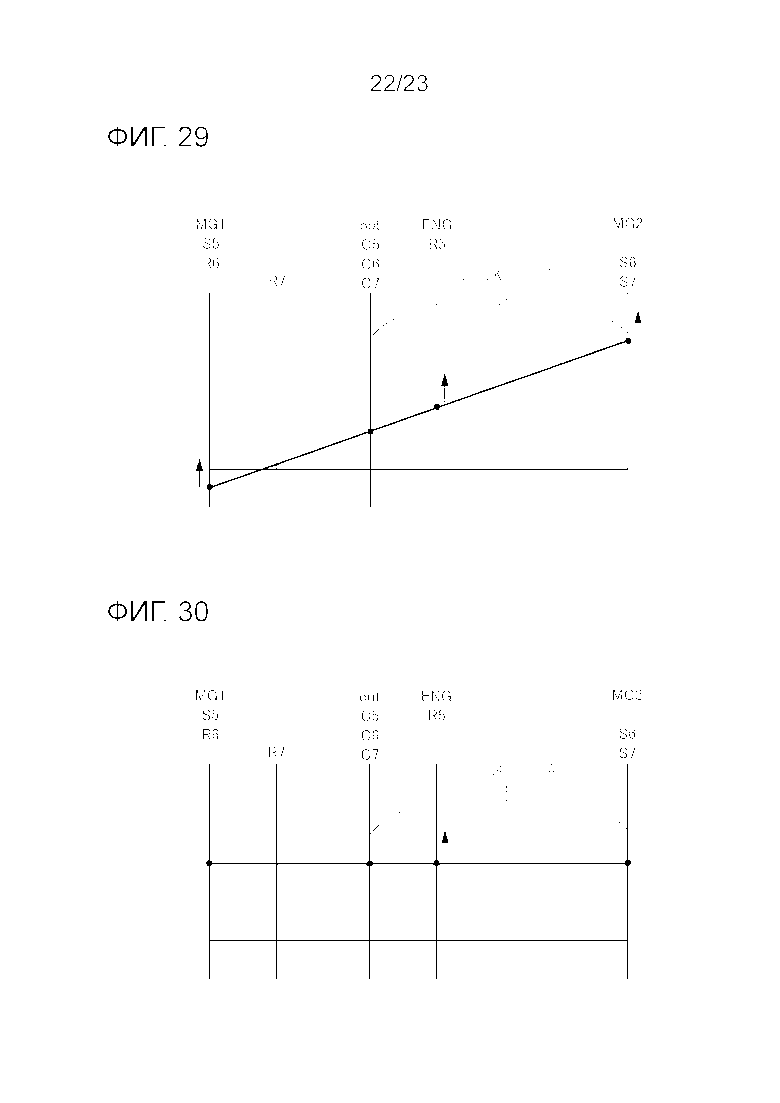
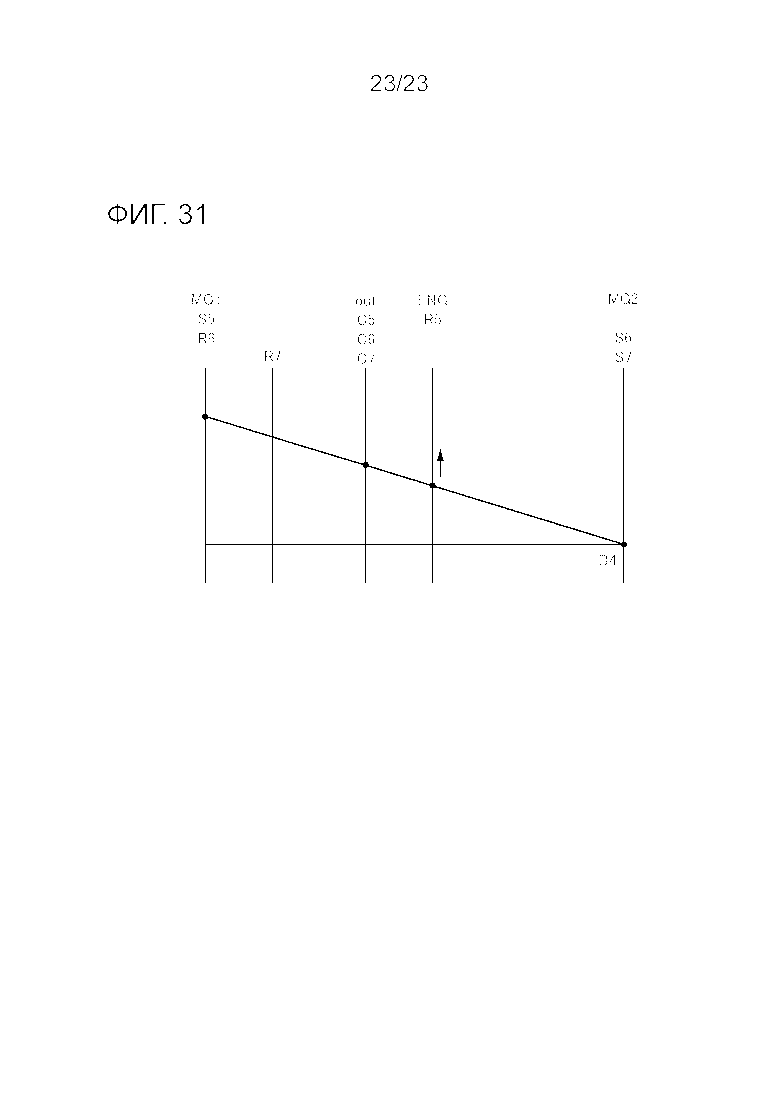
Изобретение относится к транспортным средствам. Система управления движущей силой транспортного средства содержит двигатель, вращающуюся машину и дифференциальный механизм, с вращающимися элементами. Система управления дополнительно содержит первое и второе зацепляющие устройства, соединяющие вращательные элементы и стационарный элемент. В качестве зацепляющего устройства используется сохраняющая состояние муфта. Сохраняющая состояние муфта выполнена с возможностью зацепления при приеме сигнала команды управления зацеплением и расцепления при приеме сигнала команды управления расцеплением и поддержания текущего состояния зацепления, когда прекращается передача сигналов в сохраняющую состояние муфту. Предотвращается непреднамеренная смена режима. 11 з.п. ф-лы, 31 ил.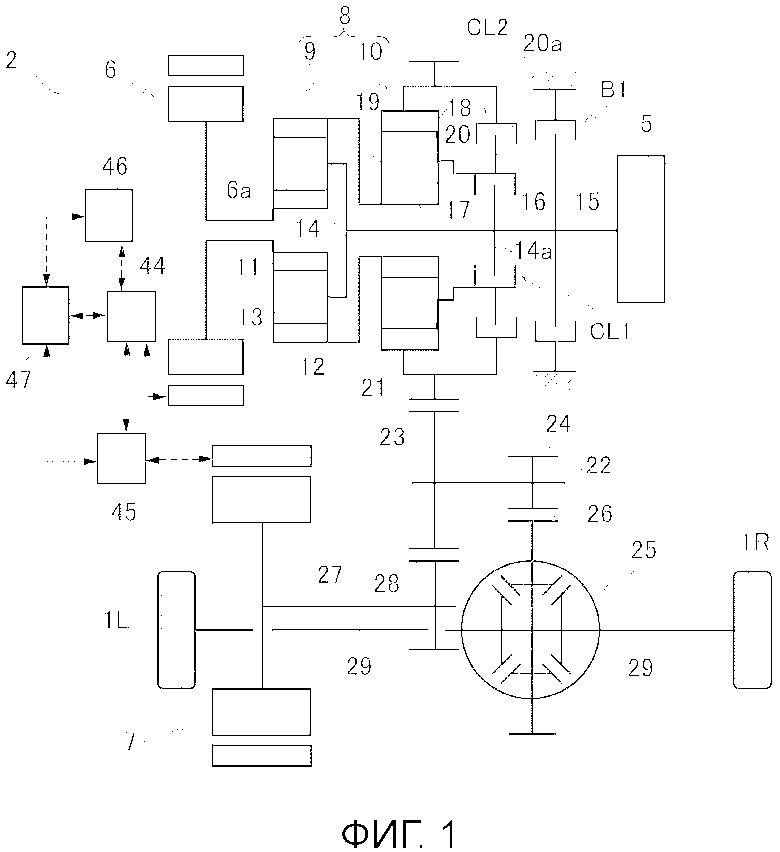
1. Система управления движущей силой транспортного средства, содержащая:
двигатель;
вращающуюся машину; и
дифференциальный механизм, который выполнен с возможностью выполнения дифференциального вращения между первым вращающимся компонентом, соединенным с двигателем, вторым вращающимся компонентом, соединенным с вращающейся машиной, и третьим вращающимся компонентом, соединенным с выходным компонентом;
причем дифференциальный механизм содержит множество вращающихся элементов;
при этом система управления движущей силой дополнительно содержит:
первое зацепляющее устройство, которое соединяет первый вращающийся элемент и второй вращающийся элемент или первый реактивный элемент и стационарный компонент; и
второе зацепляющее устройство, которое соединяет третий вращающийся элемент и четвертый вращающийся элемент или второй реактивный элемент и стационарный компонент;
причем в качестве, по меньшей мере, одного из первого зацепляющего устройства и второго зацепляющего устройства используется сохраняющая состояние муфта,
при этом сохраняющая состояние муфта выполнена с возможностью зацепления при приеме сигнала команды управления зацеплением и расцепления при приеме сигнала команды управления расцеплением и поддержания текущего состояния зацепления, когда прекращается передача сигналов в сохраняющую состояние муфту.
2. Система управления движущей силой транспортного средства по п. 1, в которой дифференциальный механизм выполнен с возможностью установления:
первого рабочего режима, в котором крутящий момент двигателя доставляется в выходной компонент с первым заданным отношением посредством зацепления любого из первого зацепляющего устройства и второго зацепляющего устройства; и
второго рабочего режима, в котором крутящий момент двигателя доставляется в выходной компонент со вторым заданным отношением, которое меньше первого заданного отношения, посредством зацепления другого из первого зацепляющего устройства и второго зацепляющего устройства.
3. Система управления движущей силой транспортного средства по п. 1, в которой дифференциальный механизм выполнен с возможностью установления:
фиксированного режима, в котором отношение частот вращения между двигателем и выходным компонентом является постоянным посредством зацепления первого зацепляющего устройства и второго зацепляющего устройства; и
бесступенчатого режима, в котором отношение частот вращения между двигателем и выходным компонентом варьируется непрерывно посредством зацепления любого из первого зацепляющего устройства и второго зацепляющего устройства.
4. Система управления движущей силой транспортного средства по любому из пп. 1-3, в которой третий вращающийся элемент включает в себя любой из первого вращающегося элемента и второго вращающегося элемента.
5. Система управления движущей силой транспортного средства по любому из пп. 1-3, в которой четвертый вращающийся элемент включает в себя вращающиеся элементы, отличные от первого вращающегося элемента, второго вращающегося элемента и третьего вращающегося элемента.
6. Система управления движущей силой транспортного средства по любому из пп. 1-3, в которой второй реактивный элемент включает в себя вращающиеся элементы, отличные от первого реактивного элемента.
7. Система управления движущей силой транспортного средства по любому из пп. 1-3, в которой сохраняющая состояние муфта используется в качестве как первого зацепляющего устройства, так и второго зацепляющего устройства.
8. Система управления движущей силой транспортного средства по любому из пп. 1-3, в которой
в качестве другого из первого зацепляющего устройства и второго зацепляющего устройства используется нормально разомкнутая муфта, и
нормально разомкнутая муфта выполнена с возможностью зацепления при приеме сигнала команды управления зацеплением и расцепления, когда прекращается передача сигналов в нормально разомкнутую муфту.
9. Система управления движущей силой транспортного средства по п. 7, дополнительно содержащая первичный движитель, который доставляет выходной крутящий момент в выходной компонент без прохождения через дифференциальный механизм.
10. Система управления движущей силой транспортного средства по любому из пп. 1-3, в которой
в качестве другого из первого зацепляющего устройства и второго зацепляющего устройства используется нормально замкнутая муфта, и
нормально замкнутая муфта выполнена с возможностью расцепления при приеме сигнала команды управления расцеплением и зацепления, когда прекращается передача сигналов в нормально замкнутую муфту.
11. Система управления движущей силой транспортного средства по любому из пп. 1-3, в которой сохраняющая состояние муфта включает в себя кулачковую муфту, содержащую:
пару вращающихся компонентов, располагающихся напротив друг друга, при обеспечении возможности вращения относительно друг друга;
стержень, который подталкивает и извлекает один из вращающихся компонентов в направлении к/от другого вращающегося компонента при приеме сигнала команды управления зацеплением или сигнала команды управления расцеплением; и
пружину сжатия, которая передает нагрузку стержня в упомянутый один из вращающихся компонентов.
12. Система управления движущей силой транспортного средства по любому из пп. 1-3, дополнительно содержащая:
контроллер, который управляет первым зацепляющим устройством и вторым зацепляющим устройством,
при этом контроллер выполнен с возможностью:
определения зацепляющего устройства, в котором возникает неисправность, из первого зацепляющего устройства и второго зацепляющего устройства;
определения того, зацепляется или расцепляется зацепляющее устройство, в котором возникает неисправность;
расцепления зацепляющего устройства, работающего надлежащим образом, если зацепляющее устройство, в котором возникает неисправность, зацепляется; и
зацепления зацепляющего устройства, работающего надлежащим образом, если зацепляющее устройство, в котором возникает неисправность, расцепляется.
| JP 2017007437 A, 12.01.2017 | |||
| Транспортное средство с гибридной силовой установкой | 2016 |
|
RU2629648C1 |
| US 2005221939 A1, 06.10.2005 | |||
| KR 20100037204 A, 09.04.2010 | |||
| US 2008015073 A1, 17.01.2008. | |||

