Изобретение относится к области низковольтных электрических аппаратов, в частности к поляризованным коммутационным устройствам, и может быть использовано при проектировании реле или контакторов с увеличенными ходами на повышенные напряжения, или, например, для создания различных расцепителей для автоматических выключателей, подвергаемым ударным и вибрационным внешним воздействиям.
Известно огромное количество конструктивных схем магнитных цепей поляризованных магнитных систем, описанных в различной литературе, [например, 1-5 и др.], и являющихся аналогами. Традиционно авторы во всех информационных источниках, в зависимости от желаемого результата, отдают предпочтение параллельной (дифференциальной) или мостовой схемам магнитных цепей. Однако все параллельные и мостовые схемы магнитных цепей имеют общий недостаток - невозможность или ограниченность увеличения рабочего хода якоря в заданных габаритах, т.к. ампер-витки срабатывания всегда зависят от величины рабочего зазора. Практически все максимальные значения рабочих зазоров магнитных систем различных реле или контакторов находятся в пределах 1÷1,5 мм для мостовых схем, и 2÷2,3 мм для параллельных (дифференциальных). Это обстоятельство сильно ограничивает область применения поляризованных магнитных систем. Так, например, всем известные поляризованные реле как отечественного, так и иностранного производства имеют ограничения по коммутируемым напряжениям и мощности, основной или даже главной причиной этого является невозможность увеличения рабочих зазоров в приемлемых габаритах изделия. Основная область применения подобных реле - в сетях с напряжением 27÷36 В постоянного тока и 115 В переменного тока частоты 400 Гц. При заявленных в технической документации повышенных напряжениях (например, более 48 В) постоянного тока реальные коммутируемые токи, либо количество коммутационных циклов изделия могут снижаться до неприемлемых величин.
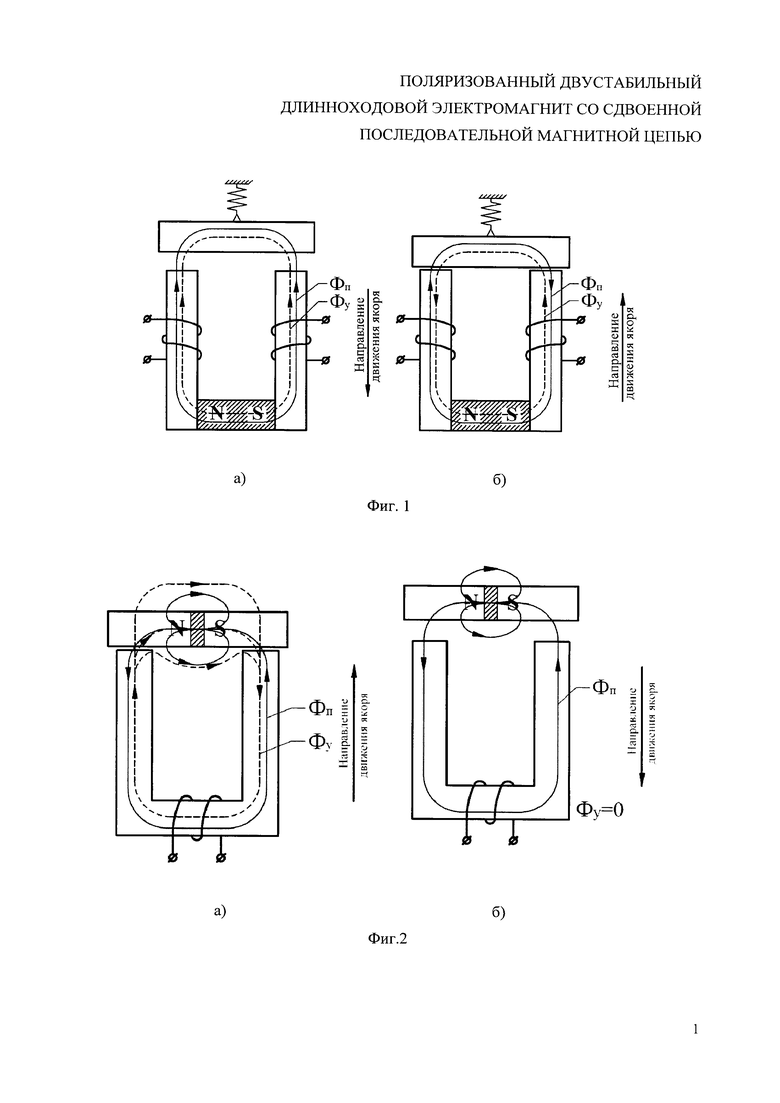
Последовательная же магнитная цепь описывается в источниках [1-5 и др.] только с «пассивным» якорем и возвратной пружиной (Фиг. 1). Считается, что «… Для возврата якоря в исходное положение в поляризованном электромагните с магнитной системой последовательного типа, так же как и в нейтральных электромагнитах, необходимо иметь возвратную пружину» [1, 2, 3]. Однако, известно множество конструкций поляризованных реле с магнитной системой последовательного типа, с «активным якорем» (магнит находится в якоре) когда возвратная пружина не требуется (Фиг. 2). Для удобства анализа и сравнения магнитные системы поляризованных электромагнитов принято делить на два типа - с «активными» и «пассивными» якорями [7]. «Пассивные» якоря - это якоря из магнитомягкой стали не содержащие постоянного магнита или обмотки, т.е. не имеющие своего собственного поля. Под «активными» якорями будем понимать такие якоря, которые содержат постоянный магнит или обмотку управления, т.е. имеющие свое собственное поле. В такой системе (Фиг. 2а) при подаче на обмотку напряжения срабатывания активный якорь отталкивается от полюсов магнитопровода за счет встречно направленных поляризующего Фп и управляющего Фу потоков, а возвращается в исходное состояние (Фиг. 2б) после снятия напряжения с обмотки, за счет усилий, создаваемых собственным полем. В этой системе якорь имеет одно устойчивое положение.
На фиг. 3а и 3б представлен двустабильный вариант магнитной системы с «активным» якорем и магнитопроводящим упором. После подачи на обмотку напряжения управления (Фиг. 3а) появляется магнитодвижущая сила, которая создает рабочий поток управления Фу, противоположный поляризующему Фп. Якорь, после сравнивания потока управления и поляризующего потока, начинает движение на срабатывание (отталкиваться от полюсов). Для снижения потребления после срабатывания и удерживания якоря в сработанном состоянии (обеспечение второго устойчивого положения якоря) в магнитную систему добавлена магнитопроводящая пластина (упор), на которую залипает якорь после срабатывания. Для обеспечения возврата (Фиг. 3б) на обмотку подают напряжение обратной полярности для создания управляющего потока на притягивание, направленного согласно с поляризующим потоком. Якорь, оторвавшись от упора, возвращается в исходное состояние за счет усилий, развиваемых направленными согласно поляризующим потоком магнита и потоком управления. Такие схемы магнитной цепи используются, например, в сильноточных реле РЭП32, РЭП33, РЭП42, РЭП43 (на номинальные токи до 100 А) разработанных ранее (до 2000 г.) во ВНИИР г. Чебоксары, и новые (разработка после 2000 г.) РЭП78 - на номинальные токи до 150 А. Аналогами также могут служить разработанные ранее ВНИИР реле в герметичном исполнении (на номинальные токи до 100 А) РЭП13-220, РЭП13-330, РЭП14-28, РЭП14-31, где вместо магнитопроводящего упора расположен второй П-образный магнитопровод с обмоткой. При этом схема магнитной цепи преобразуется в дифференциальную (параллельную). Рабочие хода якоря всех вышеупомянутых реле также находятся в пределах 1,5÷2,3 мм.
В качестве прототипа принимаем наиболее близкую по технической сущности двустабильную магнитную систему реле РЭП33-200 ТУ 3425-040-0216823-95 (Фиг. 3а, 3б и 5а), так же описанную в [6]. Конструкция магнитной системы РЭП33 проста, имеет сравнительно малые размеры и массу, обладает достаточно высокой чувствительностью. Магнитная система этих реле имеет последовательную магнитную цепь, состоящую из магнитопровода с обмоткой, поворотного якоря с постоянным магнитом и полюсными наконечниками. Якорь этих реле содержит современный высококоэрцитивный магнит из материала неодим-железо-бор. Поляризующий поток Фп постоянного магнита замыкается через полюсные наконечники якоря и магнитопровод, создавая удерживающие усилия и образуя с потоком управления Фу последовательную магнитную цепь.
Основными недостатками магнитной системы известного решения являются:
1. Необходимость применения магнитопроводящего упора для удержания якоря в сработанном положении (для обеспечения второго устойчивого положения якоря).
2. Невозможность увеличения рабочего хода якоря, т.к. с удалением якоря от полюсов магнитопровода поляризующий поток Фп, проходящий через магнитопровод ослабевает и якорь теряет возможность к самовозврату, а наличие удерживающей магнитопроводящей пластины дополнительно уменьшает поляризующий поток Фп через магнитопровод и резко увеличивает ампер-витки управления возвратом.
3. Большое (удвоенное, по отношению к сечению, необходимому для проведения поляризующего потока Фп) сечение магнитопровода, т.к. при притяжении якоря к сердечникам (при возврате) необходимо обеспечить прохождение по магнитопроводу двух согласно направленных потоков, Фп и Фу - управляющего и поляризующего.
4. Зависимость ампер-витков срабатывания от величины рабочего зазора (хода якоря). Этот недостаток присущ всем известным поляризованным двустабильным магнитным системам.
5. Длинные пути для прохождения магнитных потоков (длинные сердечники, переходные сопротивления в соединениях с ярмом) увеличивают магнитное сопротивление цепи, и, соответственно снижают удерживающее усилие якоря в замкнутой системе, требуют больших ампер-витков для создания управляющего потока.
6. Недостаточная устойчивость к внешним механическим воздействиям, т.к. якорь не уравновешен относительно оси вращения. Свободную от полюсов и магнита сторону якоря в некоторой степени уравновешивают подвижной частью контактной системы.
7. Высокая трудоемкость изготовления, сборки и регулировки прилегания якоря.
Целью заявляемого изобретения является увеличение рабочего хода якоря и вращающего момента на всем протяжении хода, увеличение эффективности использования постоянного магнита, расширение области применения поляризованных магнитных систем, а также устранение известных вышеперечисленных недостатков, присущих большинству ранее разработанных коммутационных изделий с постоянными магнитами.
Технический результат заявляемого технического решения - увеличение рабочего хода якоря и вращающего момента на всем протяжении хода, уменьшение сечения магнитопровода, повышение стабильности ампер-витков срабатывания, повышение эффективности магнита и цепи управления, повышение устойчивости к внешним механическим воздействиям, уменьшение габаритов и массы устройства, облегчение процесса сборки и регулировки якоря.
Указанный технический результат достигается тем, что в поляризованном двустабильном длинноходовом электромагните со сдвоенной последовательной магнитной цепью, содержащем поворотный якорь с постоянным магнитом и полюсными наконечниками, магнитопровод с обмоткой, образующими замкнутую последовательную магнитную цепь, в поворотный якорь введен дополнительный постоянный магнит с полюсными наконечниками, при этом магниты намагничены разнонаправлено, расположены равноудаленно и параллельно относительно оси вращения, размещенной параллельно обмотке, расположенной на средней части магнитопровода, выполненного Н-образным, якорь притянут только к одной из сторон Н-образного магнитопровода, с возможностью создания одного из двух стабильных положений, в каждом из которых поток одного из магнитов, замкнут на одну из сторон Н-образного магнитопровода, образуя с ней замкнутую последовательную магнитную цепь, полюсные наконечники якоря содержат собственные оси вращения и выполнены с возможностью самоустанавливаться на полюсах магнитопровода в конечных положениях, постоянные магниты с полюсными наконечниками расположены на раме якоря, равноудаленно и параллельно ее торцам и зафиксированы между собой пружинящей немагнитной скобой, якорь и магнитопровод соединены пластинами с продольными пазами в местах крепления с возможностью регулировки величины хода якоря.
Сущность предлагаемого технического решения заключается в том, что:
1. Конструктивно симметричный якорь с двумя постоянными магнитами имеет два устойчивых положения за счет расположения оси вращения параллельно средней части Н-образного магнитопровода, и возможности вращения и замыкания только на одну из его сторон, ограничивая дальнейшее его движение с целью устранения магнитопроводящего упора.
2. Якорь содержит два постоянных магнита с полюсными наконечниками, поляризующие потоки которых взаимодействуют с управляющим потоком на всем протяжении хода, причем при ослаблении взаимодействия управляющего потока с одним из поляризующих потоков, растет взаимодействие с другим. Таким образом, для создания момента вращения на якоре используются одновременно и согласованно притягивающие и отталкивающие усилия с целью увеличения хода якоря и увеличения его момента вращения.
3. В магнитной системе, с целью уменьшения сечения магнитопровода, при срабатывании используется только встречный поток управления Фу. Необходимое сечение магнитопровода для проведения потока управления Фу равно сечению, необходимому для проведения поляризующего потока Фп, т.к. суммарная величина встречных потоков в последовательной схеме магнитной цепи в любой момент времени не может превысить величину поляризующего потока Фп (так же, как и жидкость не течет по одной трубе в разных направлениях).
4. В предлагаемом техническом решении рабочие зазоры отсутствуют в начальный момент, до трогания, т.к. якорь накоротко замыкается на одну из сторон Н-образного магнитопровода, а появляются уже в процессе срабатывания, после отрыва якоря от упоров (полюсов) магнитопровода. Причем начало движения якоря происходит в момент сравнивания Фп и Фу поляризующего и управляющего потоков. Устранение зависимости ампер-витков трогания от величины рабочих зазоров позволяет увеличивать (регулировать) рабочий ход якоря, не изменяя параметров цепи управления.
5. Обмотка расположена на средней части Н-образного магнитопровода, что позволило значительно сократить длину магнитопроводящих путей в системе и уменьшить массу полюсных наконечников якоря, увеличить эффективность постоянных магнитов и управляющего потока, уменьшить габариты магнита и объем обмотки.
6. Якорь выполнен полностью симметричным относительно оси вращения и конструктивно уравновешен с целью увеличения устойчивости к внешним механическим воздействиям.
7. Полюсные наконечники якоря имеют оси вращения, обеспечивающие самопроизвольное прилегание к торцам магнитопровода, исключающие операцию регулировки прилегания полюсных наконечников якоря к торцам магнитопровода. В конструкции якоря так же полностью исключены операции сварки, высокотемпературной пайки и подгонки магнитов. С целью упрощения технологии сборки и регулировки якоря полюсные наконечники с магнитом фиксируются пружинящей скобой из немагнитного материала.
Сущность изобретения поясняется изображениями, где:
на фиг. 1 - схема известной магнитной системы с последовательной магнитной цепью и «пассивным» якорем: а) направление Фу на срабатывание; б) направление Фу на возврат;
на фиг. 2 - схема известной магнитной системы с последовательной магнитной цепью и «активным» якорем: а) направление Фу на срабатывание; б) Фу=0, возврат якоря происходит за счет Фп;
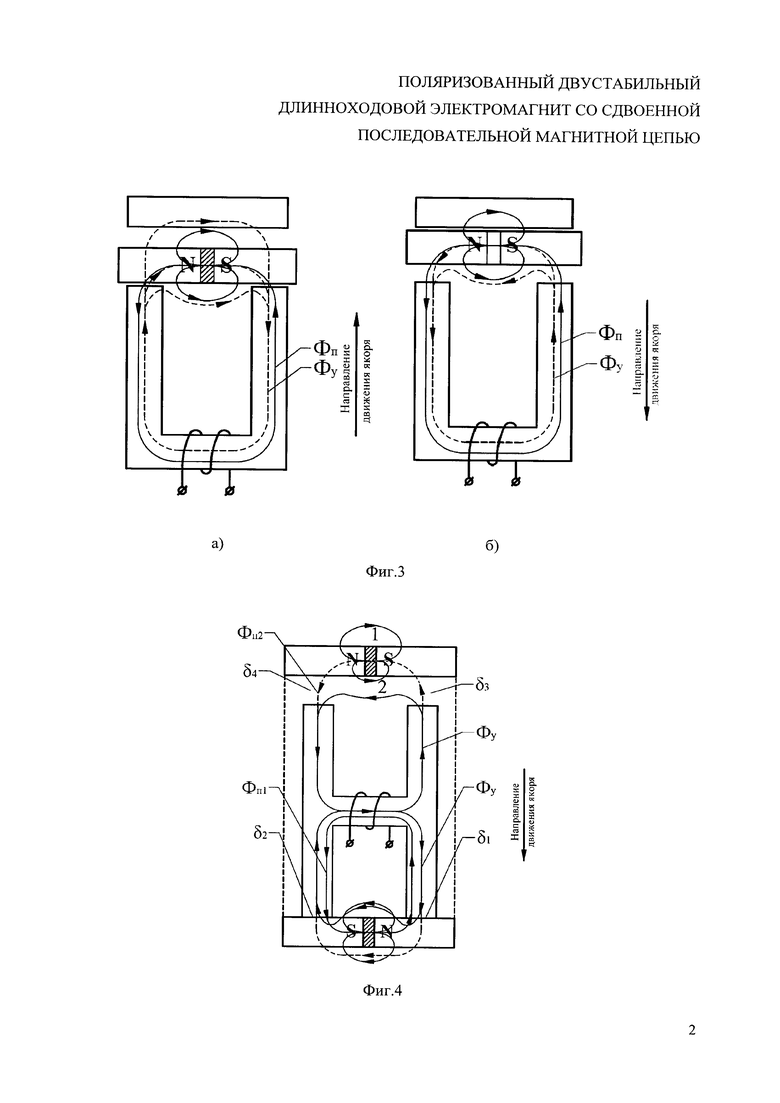
на фиг. 3 - схема известной магнитной системы с последовательной магнитной цепью и «активным» якорем и магнитопроводящим упором: а) направление Фу на срабатывание; б) направление Фу на возврат якоря;
фиг. 4 - схема поляризованной двустабильной длинноходовой магнитной системы со сдвоенной последовательной магнитной цепью;
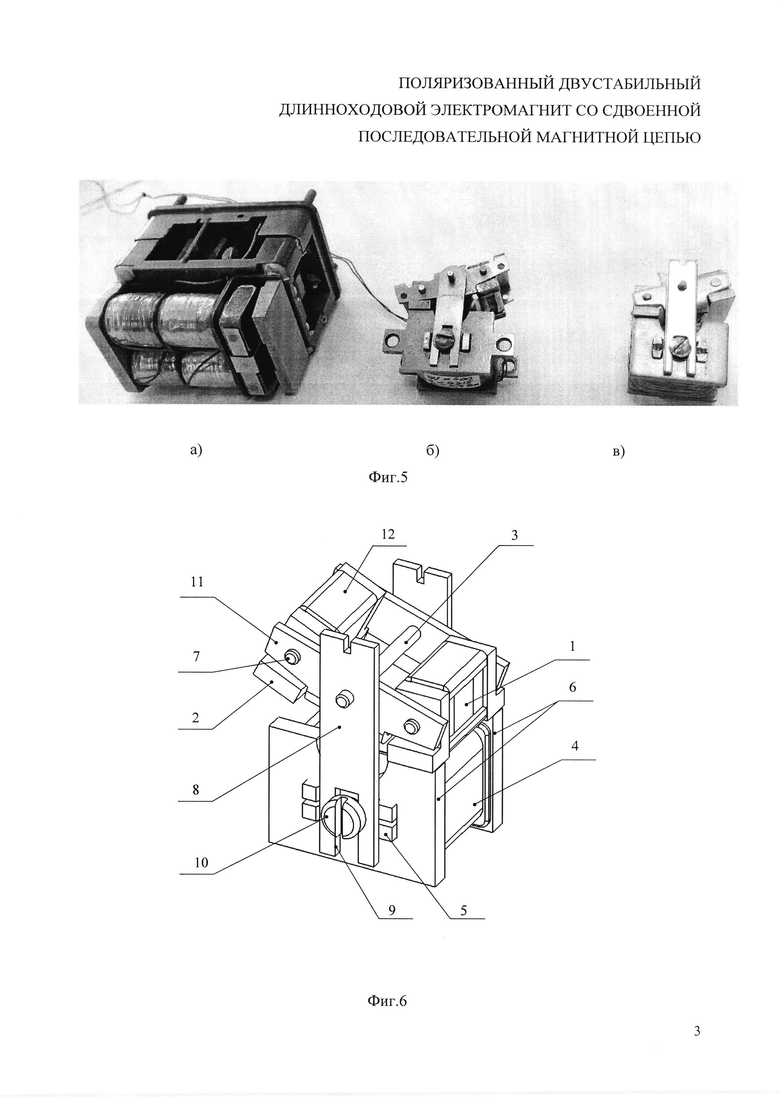
фиг. 5 -
а) - известное реле РЭП33-200 (прототип), габариты магнита (5X12) Х7 мм, рабочий ход якоря 2,1 мм;
б) - макетный образец заявляемой магнитной системы, габариты магнита (4X7) Х8 мм, рабочий ход якоря 6 мм;
в) - опытный образец магнитной системы, габариты магнита (4X7) Х4 мм, рабочий ход якоря 6 мм;
фиг. 6 - конструкция магнитной системы поляризованного двустабильного длинноходового электромагнита со сдвоенной последовательной магнитной цепью.
На фиг. 6 приняты следующие обозначения:
1 - постоянный магнит (2 шт.);
2 - полюсные наконечники (4 шт.);
3 - ось вращения якоря;
4 - обмотка электромагнита;
5 - сердечник (средняя часть Н-образного магнитопровода);
6 - боковые стенки (стороны) Н-образного магнитопровода;
7 - оси вращения полюсных наконечников (4 шт.);
8 - пластины оси вращения якоря и регулировки величины хода (2 шт.);
9 - продольный паз в пластине оси вращения якоря и регулировки величины хода;
10 - винты крепления пластины оси вращения якоря и регулировки хода (2 шт);
11 - скоба (рама) якоря;
12 - скоба фиксации магнитов с полюсными наконечниками (2 шт.).
Поляризованный электромагнит содержит поворотный якорь, два постоянных магнита 1 с полюсными наконечниками 2 намагниченных разнонаправленно, Н-образный магнитопровод с обмоткой 4, находящейся на средней части 5 магнитопровода.
Н-образный магнитопровод образован боковыми стенками 6 со сквозными отверстиями для установки сердечника 5 с обмоткой 4. Боковые стенки расположены параллельно друг другу, сердечник - перпендикулярно им, вместе с якорем они образуют одну из двух замкнутых последовательных магнитных цепей.
На магнитопроводе закреплены винтами 10 пластины 8, служащие для крепления оси вращения 3 якоря и соединения между собой якоря и Н-образного магнитопровода, также, благодаря продольным пазам 9, возможна регулировка величины хода якоря. Настройка требуемого хода якоря и фиксация положения пластин 8 производится двумя винтами 10.
Постоянные магниты 1 изготовлены прямоугольного сечения из высококоэрцитивного материала неодим-железо-бор и намагничены разнонаправлено. Магниты 1 и полюсные наконечники 2 фиксируются между собой пружинящей скобой 12, изготовленной из немагнитного материала. Расположены постоянные магниты 1 вместе с полюсными наконечниками 2 на скобе/раме/каркасе якоря 11, равноудаленно и параллельно торцам скобы/рамы/каркаса 11 и оси вращения якоря 3, которые в свою очередь параллельны обмотке 4, находящейся на средней части Н-образного магнитопровода 5, и соединены с помощью осей вращения 7. Оси вращения полюсных наконечников 7 необходимы для самоустановки полюсных наконечников 2 на полюса боковых стенок магнитопровода 6 в конечных положениях, когда якорь находится в одном из двух стабильных положений, образуя одну из двух возможных замкнутых последовательных магнитных цепей.
Поляризованный двустабильный длинноходовый электромагнит со сдвоенной последовательной магнитной цепью работает следующим образом.
Реальные образцы заявляемого изобретения (Фиг. 5б и 5в) были выполнены в варианте с поворотным якорем. Для удобства описания принципа работы магнитную систему будем рассматривать в варианте с прямоходовым якорем, представленном на Фиг. 4. Верхняя и нижняя части якоря жестко связаны, и якорь может продольно перемещаться либо вверх, либо вниз относительно торцов Н-образного магнитопровода.
При появлении в магнитной цепи потока управления Фу, создаваемого ампер-витками обмотки W, расположенной на сердечнике (в средней части Н-образного магнитопровода), происходит следующее:
- в нижней части магнитной системы в местах прилегания полюсных наконечников якоря к торцам магнитопровода потоки Фп1 и Фу компенсируются, и силы, удерживающие якорь сначала ослабевают, и при появлении зазоров δ1 и δ2 (момент отрыва якоря) встречно направленные потоки Фп1 и Фу образуют силы, отталкивающие якорь.
- в это же время в верхней части магнитной системы часть поляризующего потока Фп2 вытесняется встречно направленным потоком управления Фу из зоны 2 в зону 1, другая часть поляризующего потока Фп2 соединяется в зазорах δ3 и δ4 в последовательную цепь с потоком управления Фу, создавая притягивающие усилия. В зоне 1 потоки имеют встречное направление, поэтому управляющий поток Фу здесь не проходит. По мере движения и приближения якоря к торцам магнитопровода весь поляризующий поток Фп2 из зоны 1 переходит в магнитопровод через зазоры δ3 и δ4 и в конце хода полностью соединяется (замыкается) в последовательную магнитную цепь с потоком управления Фу. Якорь переходит в другое устойчивое положение. Магнитная система имеет полную симметрию относительно оси обмотки. Поэтому возврат якоря в первоначальное положение происходит аналогично описанному, при подаче на обмотку напряжения обратной полярности, либо в конструкции может быть предусмотрена вторая обмотка для возврата.
Сдвоенная последовательная магнитная цепь позволяет передавать на якорь для формирования момента вращения (либо продольного перемещения) одновременно два согласованных усилия - на притягивание с одной стороны и отталкивания с другой. Данный факт позволяет увеличить момент вращения (либо усилие перемещения) якоря на всем протяжении хода, т.к. при уменьшении силы отталкивания с одной стороны растет сила притягивания с другой. Поток Фу активно взаимодействует с потоками Фп1 и Фп2 на протяжении всего хода. Якорь «активный» на протяжении всего хода, что позволяет значительно увеличить величину хода в сравнении с прототипом, не изменяя ампер-витки срабатывания.
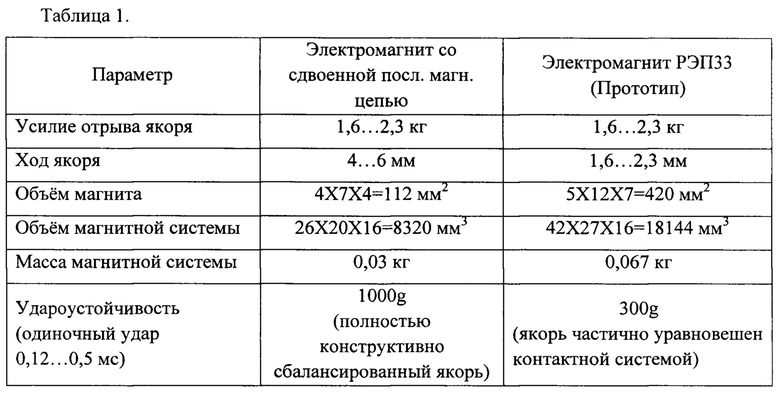
При примерно одинаковых усилиях отрыва, создаваемых магнитом в замкнутом состоянии якоря можно сравнить некоторые параметры электромагнитов прототипа и предлагаемого технического решения, представленные в таблице 1.
Таким образом, устранение магнитопроводящего упора обусловлено конструктивными особенностями электромагнита, так как якорь выполнен симметричным с двумя постоянными магнитами, закреплен к магнитопроводу с помощью оси вращения, параллельно средней части Н-образного магнитопровода, при этом имея два устойчивых положения, ограничивающих его движение.
Уменьшение сечения магнитопровода определяется тем, что при срабатывании используется только встречный поток управления.
На снижение массогабаритных показателей существенно оказывает влияние тот факт, что увеличение рабочего ходя якоря осуществляется без изменения параметров цепи управления, то есть без увеличения ампер-витков срабатывания (трогания), следовательно, объема обмотки. Сама обмотка управления находится на средней части Н-образного магнитопровода, она является общей для двух магнитных последовательных цепей, управляющий поток которой проходит по двум последовательным магнитным цепям в зависимости от положения якоря, что существенно влияет на массогабаритные показатели, так как исключается обмотка управления для одной из последовательных цепей.
Устойчивость к внешним механическим воздействиям обусловлена тем, что якорь выполнен полностью симметричным относительно оси вращения и конструктивно уравновешен.
Самопроизвольное прилегание полюсных наконечников якоря к торцам магнитопровода, фиксация полюсных наконечников с магнитом пружинящей скобой из немагнитного материала значительно облегчают процесс регулировки и сборки изобретения в целом, так как исключается операции регулировки прилегания, сварки, высокотемпературной пайки и подгонки магнитов.
Увеличение хода якоря осуществляется благодаря использованию одновременно и согласованно притягивающие и отталкивающие усилия. Сама регулировка величины хода осуществляется с помощью пластины с продольным пазом и винтами крепления пластины к магнитопроводу электромагнита.
Использование данной магнитной системы одинаково эффективно при проектировании как сильноточных контакторов или реле, так и миниатюрных устройств с большой величиной хода якоря, позволяющей в малых габаритах изделия значительно повысить коммутируемые мощности при повышенных напряжениях. Наличие больших величин хода якоря позволяет применять в конструкции аппарата принцип самоблокировки цепей управления, когда цепь управления обрывается собственным контактом в завершающей стадии движения якоря. Обмотки в таких конструкциях всегда обесточены в статических режимах, и поэтому не греются, что позволяет использовать форсированные режимы управления, а значит их можно разместить в значительно меньших объемах, что дополнительно приводит к уменьшению габаритов и массы всей конструкции электромагнита.
Источники информации:
1. Гордон А.В. Поляризованные электромагниты [Текст] / А.В. Гордон, А.Г. Сливинская - М.: Энергия, 1964. - С. 13.
2. Ройзен В.З. Малогабаритные поляризованные реле и дистанционные переключатели [Текст] / В.З. Ройзен - Л.: Энергоатомиздат. Ленингр. отд-ние, 1969. - С. 5-6.
3. Сливинская А.Г. Электромагниты и постоянные магниты [Текст] / А.Г. Сливинская - М.: Энергия, 1972. - С. 178.
4. Ройзен В.З. Электромагнитные малогабаритные реле [Текст] / В.З. Ройзен - Л.: Энергоатомиздат. Ленингр. отд-ние, 1986. - С. 15.
5. Основы теории электрических аппаратов [Текст] / [Б.К. Буль] Под ред. Г.В. Буткевича - М.: Высшая школа, 1970. - С. 298-303.
6. Иванов И.П. Вопросы общей теории и практики проектирования поляризованных электромагнитов [Текст] / И.П. Иванов, Е.В. Сагарадзе, Г.П. Свинцов // Известия вузов, Сер. Электромеханика, - Том 60. - 2017. - №2. - С. 44-49.
7. Трофимов Е.Ю. К вопросу разработки независимого расцепителя [Текст] / Е.Ю. Трофимов, А.Г. Печников // Труды академии электротехнических наук Чувашской республики - 2008. - №1. - С. 82-88, - ISBN 5-94794-001-9.
| название | год | авторы | номер документа |
|---|---|---|---|
| Поляризованный электромагнит | 2019 |
|
RU2713626C1 |
| ПОЛЯРИЗОВАННОЕ ОДНООБМОТОЧНОЕ ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2020 |
|
RU2742722C1 |
| ПОЛЯРИЗОВАННОЕ МАЛОГАБАРИТНОЕ ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2018 |
|
RU2713475C1 |
| ЭЛЕКТРОМАГНИТНОЕ ПОЛЯРИЗОВАННОЕ РЕЛЕ ПОВЫШЕННОЙ ЧАСТОТЫ И КОЛИЧЕСТВА СРАБАТЫВАНИЙ | 2003 |
|
RU2248060C1 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ И ЭЛЕКТРОМАГНИТНАЯ ПОЛЯРИЗОВАННАЯ СИСТЕМА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687230C1 |
| Поляризованная электромагнитная система | 1985 |
|
SU1257722A1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2004 |
|
RU2298243C2 |
| СПОСОБ ФОРМИРОВАНИЯ ЗНАКОПЕРЕМЕННОЙ ЭЛЕКТРОМАГНИТНОЙ СИЛЫ ПОЛЯРИЗОВАННОГО ЭЛЕКТРОМАГНИТА | 1999 |
|
RU2168230C2 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2016 |
|
RU2653532C2 |
| Поляризованное герконовое реле | 1985 |
|
SU1275576A1 |
Изобретение относится к поляризованному коммутационному устройству и может быть использовано при проектировании реле или контакторов с увеличенными ходами на повышенные напряжения или, например, для создания различных расцепителей для автоматических выключателей, подвергаемых ударным и вибрационным внешним воздействиям. В поляризованном двустабильном длинноходовом электромагните со сдвоенной последовательной магнитной цепью поворотный якорь имеет два постоянных магнита с полюсными наконечниками, намагниченных разнонаправленно, расположенных равноудаленно и параллельно относительно оси вращения. Ось вращения расположена параллельно обмотке, находящейся на средней части Н-образного магнитопровода, таким образом, что якорь притянут только к одной из двух сторон Н-образного магнитопровода и единовременно имеет одно из двух возможных стабильных положений. Техническим результатом является увеличение рабочего хода якоря и вращающего момента на всем протяжении хода, уменьшение сечения магнитопровода, повышение стабильности ампер-витков срабатывания, повышение эффективности магнита и цепи управления, повышение устойчивости к внешним механическим воздействиям, уменьшение габаритов и массы устройства, облегчение процесса сборки и регулировки якоря. 1 з.п. ф-лы, 6 ил, 1 табл.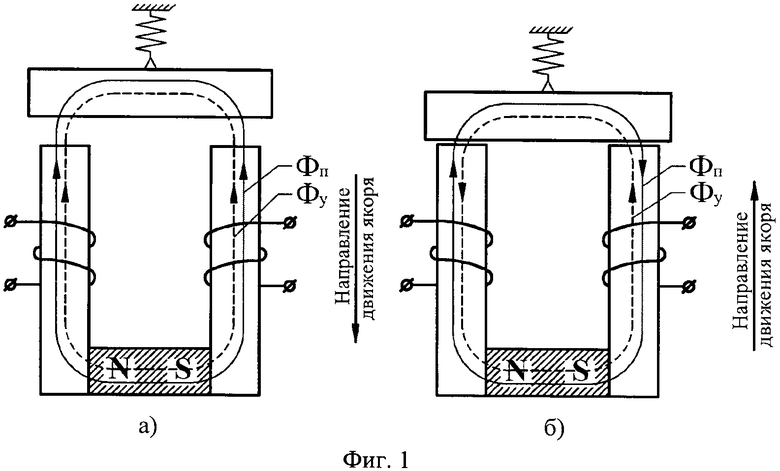
1. Поляризованный двустабильный длинноходовой электромагнит со сдвоенной последовательной магнитной цепью, содержащий поворотный якорь с постоянным магнитом и полюсными наконечниками, магнитопровод с обмоткой, образующими замкнутую последовательную магнитную цепь, отличающийся тем, что в поворотный якорь введен дополнительный постоянный магнит с полюсными наконечниками, при этом магниты намагничены разнонаправленно, расположены равноудаленно и параллельно относительно оси вращения, размещенной параллельно обмотке, расположенной на средней части магнитопровода, выполненного Н-образным, якорь притянут только к одной из сторон Н-образного магнитопровода с возможностью создания одного из двух стабильных положений, в каждом из которых поток одного из магнитов замкнут на одну из сторон Н-образного магнитопровода, образуя с ней замкнутую последовательную магнитную цепь, полюсные наконечники якоря содержат собственные оси вращения и выполнены с возможностью самоустанавливаться на полюсах магнитопровода в конечных положениях, постоянные магниты с полюсными наконечниками расположены на раме якоря равноудаленно и параллельно ее торцам и зафиксированы между собой пружинящей немагнитной скобой, якорь и магнитопровод соединены пластинами с продольными пазами в местах крепления с возможностью регулировки величины хода якоря.
2. Поляризованный двустабильный длинноходовой электромагнит со сдвоенной последовательной магнитной цепью по п. 1, отличающийся тем, что якорь выполнен прямоходовым.
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2016 |
|
RU2653532C2 |
| ПАТРОН ДЛЯ ЗАХВАТА ПРОТЯЖКИ | 0 |
|
SU160641A1 |
| US 0004644311 A1, 17.02.1987 | |||
| KR 20000056768 A, 15.09.2000. | |||

