Заявляемое техническое решение относится к области низковольтных электрических аппаратов, в частности к магнитным системам поляризованных коммутационных устройств, и может быть использовано при проектировании реле или контакторов с увеличенными ходами на повышенные напряжения, или, например, для создания различных расцепителей для автоматических выключателей, подвергаемых ударным и вибрационным внешним воздействиям.
Известно огромное количество конструктивных схем магнитных цепей поляризованных магнитных систем, описанных в различной литературе [например, 1-6, 8 и др.], и являющихся аналогами. Традиционно авторы во всех информационных источниках, в зависимости от желаемого результата, отдают предпочтение параллельной (дифференциальной) или мостовой схемам магнитных цепей.
Однако все параллельные и мостовые схемы магнитных цепей имеют общий недостаток - невозможность или ограниченность увеличения рабочего хода якоря в заданных габаритах, т.к. ампер-витки срабатывания всегда зависят от величины рабочего зазора [7]. Еще одна особенность дифференциальных и мостовых схем магнитных цепей (а в нашем случае - непреодолимый недостаток!) наличие рабочего зазора с проходящим через него поляризующим потоком, в котором находится, по крайней мере, один из концов якоря, всегда стремящегося занять одно из крайних положений в рабочем зазоре (залипнуть к одному из полюсов). Этот фактор определяет изначально двустабильную природу этих устройств.
Обычно магнитные системы коммутационных аппаратов с самовозвратом строятся на базе нейтральных электромагнитов с поворотным или прямоходовым якорем и возвратной пружиной. С целью повышения чувствительности и снижения уровня управляющих сигналов в аппаратах с самовозвратом применяют поляризованные электромагниты с дифференциальной или мостовой цепью. Однако как уже отмечалось выше, все они по принципу своей работы изначально являются двустабильными устройствами, а для обеспечения самовозврата требуется специальная регулировка - «настройка с преобладанием», что приводит к конструктивным и технологическим усложнениям и увеличению эксплуатационной нестабильности параметров, дополнительному уменьшению и так малых значений рабочих ходов. Такие системы применимы только для слаботочных поляризованных реле, а для создания устройств средней и большой мощности - они не эффективны [8]. Существуют конструкции малогабаритных зарубежных реле, или, например, РЭС8 [6], в которых поток магнита и поток управления не взаимодействуют, а самовозврат якоря осуществляется за счет притяжения якоря постоянным магнитом. Поэтому эффект повышения чувствительности здесь отсутствует.
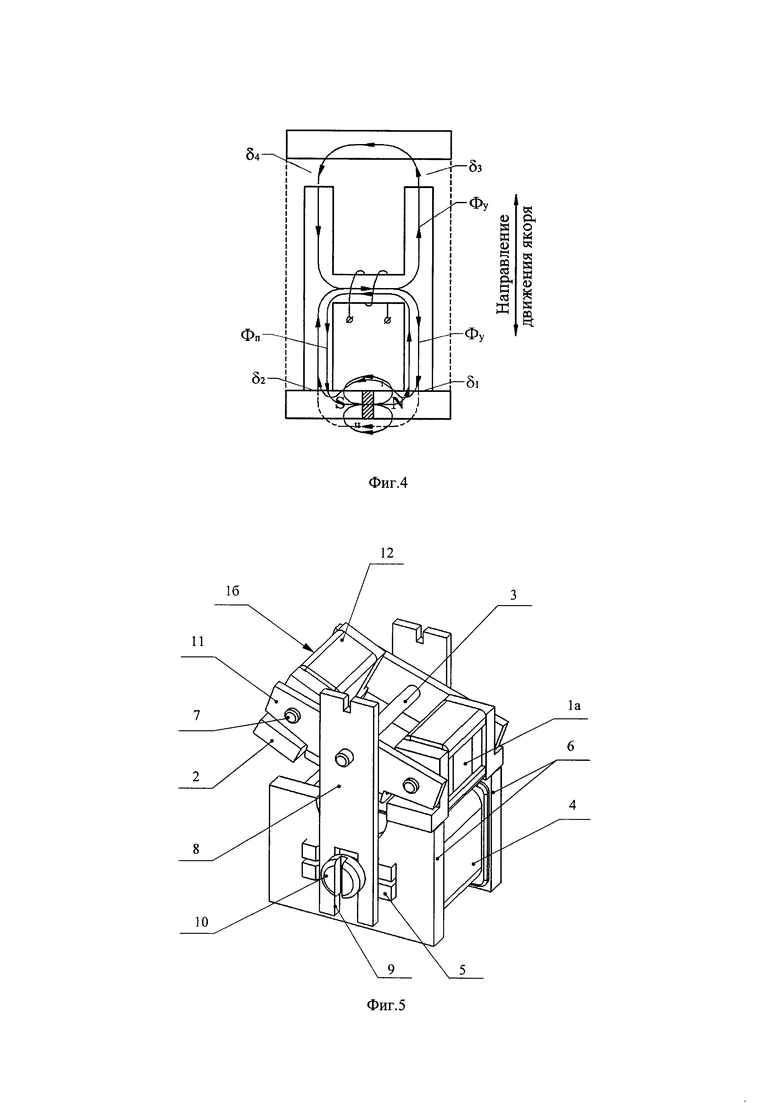
В настоящее время все больше приобретают популярность конструкции электромагнитных систем «с магнитной пружиной» (см. фиг. 3) подробно описанные в [8], так же являющиеся аналогами заявляемого технического решения. В них поляризующий поток постоянного магнита взаимодействует с управляющим потоком в рабочих зазорах, обеспечивая повышение чувствительности. Считается, что конструктивно эти магнитные системы «...имеют одно естественное устойчивое положение якоря без введения специальной регулировки» [8]. Однако этому утверждению в полной мере соответствуют лишь магнитная система с «активным» якорем №7 (фиг. 3) и магнитная система с «пассивным» якорем №5 (фиг. 3). Для удобства анализа и сравнения магнитные системы поляризованных электромагнитов принято делить на два типа - с «активными» и «пассивными» якорями. «Пассивные» якоря - это якоря из магнитомягкой стали, не содержащие постоянного магнита или обмотки, т.е. не имеющие своего собственного поля. Под «активными» якорями будем понимать такие якоря, которые содержат постоянный магнит или обмотку управления, т.е. имеющие свое собственное поле [7]. В остальных же магнитных системах конец якоря, находящийся в рабочем зазоре с поляризующим потоком, при всех конструктивных ухищрениях (при срабатывании можно конструктивно частично вывести конец якоря из зоны действия поляризующего потока) все равно стремится занять одно из крайних положений, что и объясняет некоторое залипание при возврате и необходимость применения немагнитных прокладок (или возвратных пружин) для обеспечения возврата в реальных конструкциях (например - реле максимального тока серии РЭТ12 ТУ 16-93 ИГФР.647612.011, реле серии КМ фирмы Leach, где схема магнитной цепи соответствует магнитной системе №1 (фиг. 3), или исполнительный механизм реле безопасности персонала серии РБП 200 ТУ 3425-153-00216823-2005, где схема магнитной цепи соответствует магнитной системе №2 (фиг. 3), некоторые японские малогабаритные одностабильные поляризованные реле, где схема магнитной цепи соответствует магнитной системе №6 или №8 (фиг. 3). Некоторые разновидности прямоходовой магнитной системы №10 используют фирмы ABB, Schneider и Moeller в независимых расцепителях автоматических выключателей, где небольшое залипание в конце хода якоря даже полезно, т.к. оно складывается с усилием отключающей пружины).
Магнитная система с самовозвратом №5 (фиг. 3) имеет параллельную магнитную цепь с «пассивным» поворотным якорем, который при срабатывании лишь освобождается от залипания в месте δ1, но не может от него отталкиваться. Левая часть магнитной системы №5 представляет собой обычный клапанный электромагнит, поэтому в месте 62 начальные усилия на якоре очень малы, и нарастают только в конце хода. Данная магнитная система имеет очень малый начальный момент на якоре и малую величину рабочего хода.
Магнитная система с самовозвратом №7 (фиг. 3) имеет последовательную магнитную цепь с «активным» поворотным якорем, помещенным внутрь обмотки управления. Замыкается якорь в конце хода на отдельный независимый магнитопровод. Якорь может иметь хороший момент в начале и на всем протяжении хода. Однако данная магнитная система имеет малую величину рабочего хода т.к. конструктивно якорь находится в обмотке. Так же, проектирование реальной приемлемой конструкции на базе схемы магнитной цепи №7 представляется достаточно сложным. Реальные конструкции на базе магнитной системы №7 не известны.
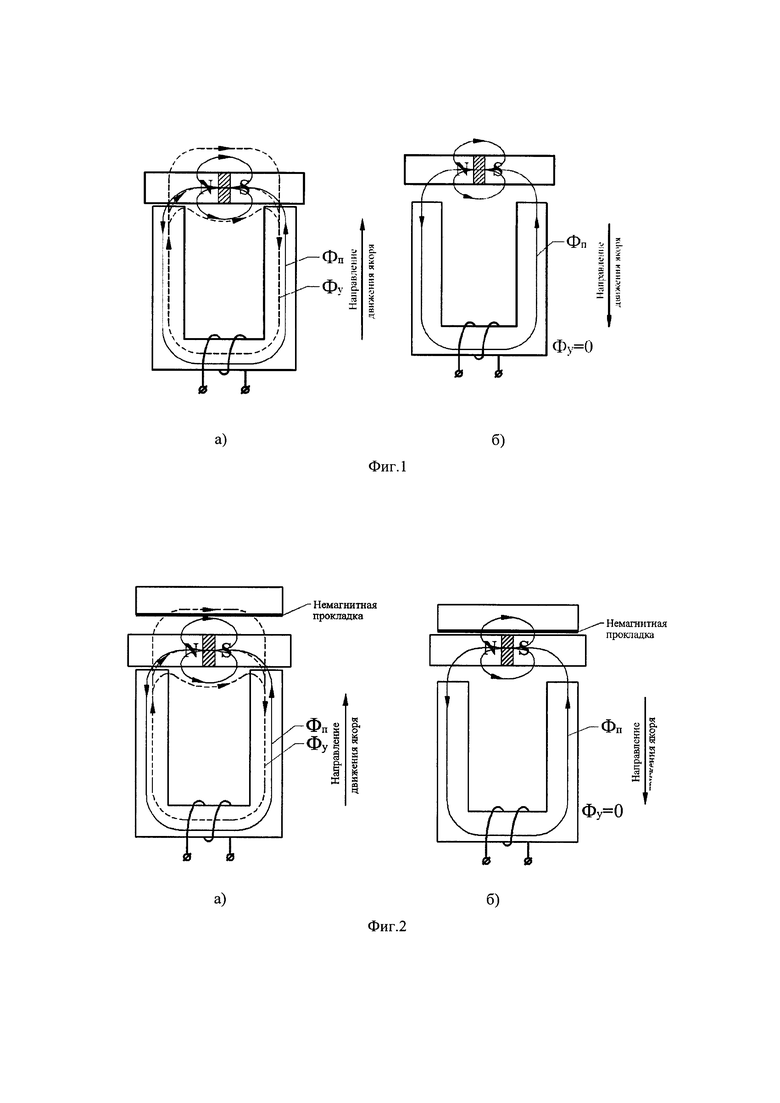
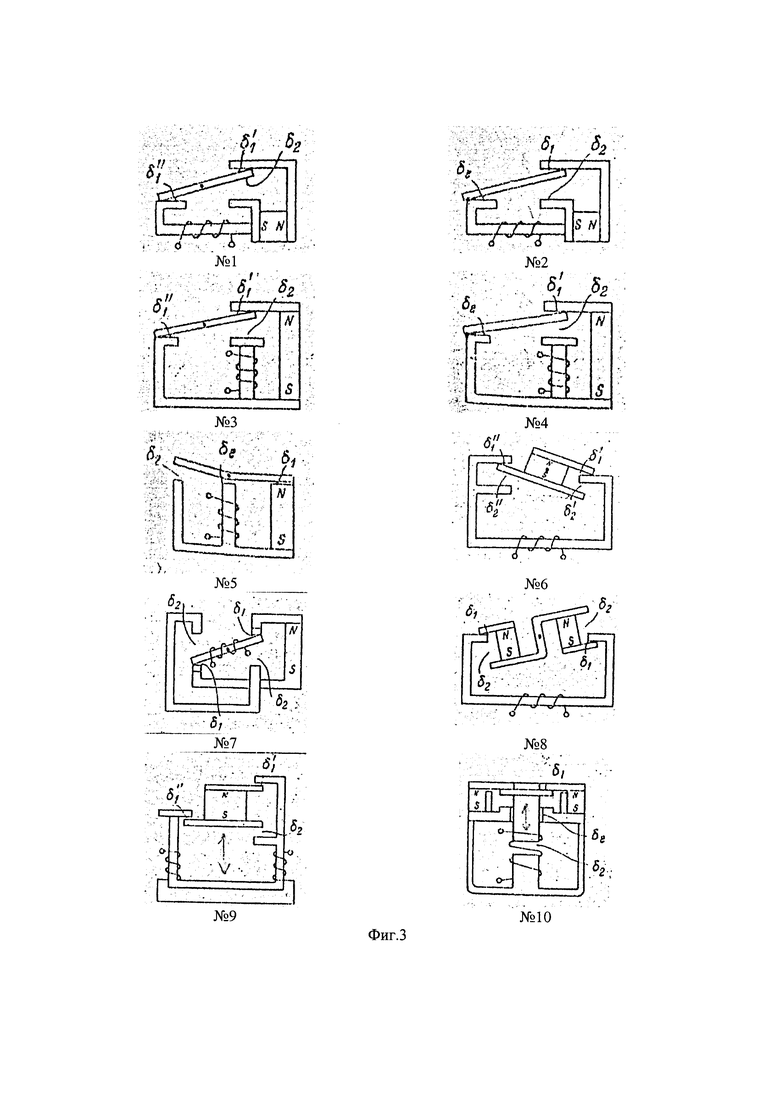
Известно множество конструкций поляризованных реле с магнитной системой последовательного типа и с «активным якорем» (магнит находится в якоре) подробно описанных в [7]. В такой системе (Фиг. 1а) при подаче на обмотку напряжения срабатывания активный якорь отталкивается от полюсов магнитопровода за счет встречно направленных поляризующего Фп и управляющего Фу потоков, а возвращается в исходное состояние (Фиг. 1б) после снятия напряжения с обмотки за счет усилий, создаваемых собственным полем. В этой системе якорь имеет одно устойчивое положение. Однако после срабатывания магнитная система становится разомкнутой, и для удержания якоря в сработанном состоянии, удаленного от торцов магнитопровода на величину хода, требуется значительная МДС, что влечет за собой увеличение габаритов и массы устройства. Для снижения потребления при удерживании якоря в сработанном состоянии в магнитную систему (Фиг. 2) часто добавляют магнитопроводящую пластину (упор), на которую залипает якорь после срабатывания. В этом случае неизбежно появляется второе устойчивое положение якоря, от которого отстраиваются включением в рабочий зазор немагнитной прокладки, что опять же ведет к значительному уменьшению величины рабочего хода. Пример - электромагнитное одностабильное реле типа РЭП42-200 ТУ 3425-123-00216823-2005 (спроектированное на базе РЭП33-200).
В качестве прототипа принимаем наиболее близкую по технической сущности и имеющую максимальное количество общих конструктивных признаков магнитную систему - поляризованный электромагнит по патенту RU2683575 С1, опубликованному 29.03.2019 бюл. №10 [7], содержащий поворотный якорь с постоянными магнитами и полюсными наконечниками, расположенными равноудалено и параллельно относительно оси вращения, расположенной параллельно обмотке, находящейся на средней части Н-образного магнитопровода, таким образом, что якорь притянут только к одной из двух сторон Н-образного магнитопровода, полюсные наконечники якоря содержат собственные оси вращения и выполнены с возможностью самоустанавливаться на полюсах магнитопровода в конечных положениях, якорь и магнитопровод соединены с возможностью регулировки величины хода якоря. Известная магнитная система имеет большое количество преимуществ, указанных в описании патента, перед всеми выше описанными аналогами.
Недостатком магнитной системы прототипа является конструктивное исполнение магнитной системы только в двустабильном варианте, несколько ограничивающее его область применения, т.к. основная масса (большая часть) изготавливаемых и применяемых различных коммутационных устройств, реле, пускателей и контакторов изготавливается с использованием одностабильного варианта магнитных систем. Различные расцепители, гидроклапаны, компрессоры, форсунки так же чаще всего спроектированы на одностабильных магнитных системах.
Целью заявляемого изобретения является создание поляризованного электромагнита с магнитной системой, расширяющей область применения поляризованной магнитной системы прототипа с сохранением всех его достоинств (преимуществ) и позволяющей на одной оснастке и из одних и тех же комплектующих деталей сформировать универсальную конструкцию как для двустабильного исполнения, так и одностабильного поляризованного длинноходового электромагнита с самовозвратом.
Технический результат заявляемого технического решения - расширение области применения магнитной системы поляризованного электромагнита при одновременной универсальности конструктивного исполнения.
Указанный технический результат достигается тем, что в поляризованном электромагните, содержащем поворотный якорь с постоянными магнитами и полюсными наконечниками, расположенными равноудалено и параллельно относительно оси вращения, расположенной параллельно обмотке, находящейся на средней части Н-образного магнитопровода, таким образом, что якорь притянут только к одной из двух сторон Н-образного магнитопровода, полюсные наконечники якоря содержат собственные оси вращения и выполнены с возможностью самоустанавливаться на полюсах магнитопровода в конечных положениях, якорь и магнитопровод соединены с возможностью регулировки величины хода якоря, якорь выполнен с одной стороны «активным», содержащим постоянный магнит с полюсными наконечниками, а с другой - содержащим «пассивный» элемент с полюсными наконечниками с возможностью одновременного и согласованного использования притягивающих усилий полюсных наконечников якоря со стороны без магнита, и отталкивающих усилий полюсных наконечников якоря со стороны с магнитом. Якорь может быть выполнен прямоходовым. «Пассивный элемент» якоря может быть выполнен, например, в виде вставки из магнитопроводящего материала или в виде цельноизготовленной части якоря. Сущность предлагаемого технического решения заключается в том, что:
1. Заменой одного из магнитов на магнитопроводящую вставку (либо на цельную деталь с полюсными наконечниками) магнитная система прототипа превращается в поляризованную одностабильную систему с самовозвратом (или «магнитной пружиной»), сохраняя все достоинства прототипа.
2. Конструкция поляризованного электромагнита становится универсальной, позволяющей на одной оснастке и из одних и тех же комплектующих деталей изготавливать совершенно разные изделия, выполняющие совершенно разные задачи. Например, из одних и тех же комплектующих деталей прототипа спроектирована и изготавливается вся гамма расцепителей (РН, РМН, MP) для автоматических выключателей, проектируются дистанционные переключатели, двустабильные и одностабильные реле на повышенные напряжения с высокой коммутационной способностью.
Сущность изобретения поясняется изображениями, где:
на фиг. 1 - схема известной магнитной системы с последовательной магнитной цепью и «активным» якорем: а) направление Фу на срабатывание; б) Фу=0, возврат якоря происходит за счет Фп;
на фиг. 2 - схема известной магнитной системы с последовательной магнитной цепью, «активным» якорем, магнитопроводящим упором и немагнитной прокладкой: а) направление Фу на срабатывание; б) Фу=0, возврат якоря происходит за счет Фп;
на фиг. 3 - конструктивные схемы №1 - №10 магнитных цепей поляризованных электромагнитов с самовозвратом (с «магнитной пружиной»), описанные в [8];
на фиг. 4 - конструктивная схема магнитной цепи поляризованного одностабильного длинноходового электромагнита с самовозвратом;
на фиг. 5 - конструкция магнитной системы поляризованного одностабильного длинноходового электромагнита с самовозвратом.
На фиг. 5 приняты следующие обозначения:
1а - постоянный магнит (1 шт. в правой по рисунку части якоря)
16 - магнитопроводящая вставка (1 шт. в левой по рисунку части якоря);
2 - полюсные наконечники (4 шт.);
3 - ось вращения якоря;
4 - обмотка электромагнита;
5 - сердечник (средняя часть Н-образного магнитопровода);
6 - боковые стенки (стороны) Н-образного магнитопровода;
7 - оси вращения полюсных наконечников (4 шт.);
8 - пластины оси вращения якоря и регулировки величины хода (2 шт.);
9 - продольный паз в пластине оси вращения якоря и регулировки величины хода;
10 - винты крепления пластины оси вращения якоря и регулировки хода (2 шт.);
11 - скоба (рама) якоря;
12 - скоба фиксации магнита и магнитопроводящей вставки с полюсными наконечниками (2 шт.).
Поляризованный электромагнит содержит поворотный якорь с постоянным магнитом 1а с одной стороны и магнитопроводящей вставкой 16 с другой стороны с полюсными наконечниками 2, Н-образный магнитопровод с обмоткой 4, находящейся на средней части 5 магнитопровода. Н-образный магнитопровод образован боковыми стенками 6 со сквозными отверстиями для установки сердечника 5 с обмоткой 4. Боковые стенки расположены параллельно друг другу, сердечник - перпендикулярно им, вместе с замкнутым якорем они образуют последовательную магнитную цепь.
На магнитопроводе закреплены винтами 10 пластины 8, служащие для крепления оси вращения 3 якоря и соединения между собой якоря и Н-образного магнитопровода, также, благодаря продольным пазам 9, возможна регулировка величины хода якоря. Настройка требуемого хода якоря и фиксация положения пластин 8 производится двумя винтами 10. Постоянный магнит 1а изготовлен прямоугольного сечения из высококоэрцитивного материала неодим-железо-бор. Магнитопроводящая вставка 16 имеет форму и размеры магнита 1а (либо применяется цельноизготовленная часть якоря с полюсными наконечниками).
Магнит 1а, магнитопроводящая вставка 1б, и полюсные наконечники 2 фиксируются между собой пружинящей скобой 12, изготовленной из немагнитного материала. Расположены постоянные магнит 1а и вставка 1б вместе с полюсными наконечниками 2 на скобе/раме/каркасе якоря 11, равноудаленно и параллельно торцам скобы/рамы/каркаса 11 и оси вращения якоря 3, которые в свою очередь параллельны обмотке 4, находящейся на средней части Н-образного магнитопровода 5, и соединены с помощью осей вращения 7. Оси вращения полюсных наконечников 7 необходимы для самоустановки полюсных наконечников 2 на полюса боковых стенок магнитопровода 6 в конечных положениях якоря.
Поляризованный одностабильный длинноходовый электромагнит с самовозвратом работает следующим образом. Реальные образцы заявляемого изобретения (так же, как и прототипа) были выполнены (в трехмерном варианте) с поворотным якорем. Для удобства описания принципа работы магнитную систему будем рассматривать (в двухмерном варианте) с прямоходовым якорем, представленном на Фиг. 4. Верхняя и нижняя части якоря жестко связаны, и якорь может продольно перемещаться либо вверх, либо вниз относительно торцов Н-образного магнитопровода.
При появлении в магнитной цепи потока управления Фу, создаваемого ампер-витками обмотки W, расположенной на сердечнике (в средней части Н-образного магнитопровода), происходит следующее:
- в нижней части магнитной системы в местах прилегания полюсных наконечников якоря к торцам магнитопровода потоки Фп и Фу компенсируются, и силы, удерживающие якорь сначала ослабевают, и при появлении зазоров δ1 и δ2 (момент отрыва якоря) встречно направленные потоки Фп и Фу образуют силы, отталкивающие якорь. При этом поток Фп вытесняется из зоны 1 в зону 2;
- в это же время в верхней части магнитной системы в зазорах δ3 и δ4 поток управления Фу создает притягивающие усилия, и по мере приближения якоря к торцам магнитопровода, в конце хода весь управляющий поток Фу замкнется через верхнюю часть якоря, создавая усилия удержания во включенном положении.
При снятии с обмотки напряжения управления исчезает и поток Фу. При этом поток Фп беспрепятственно возвращается в зону 1 и начинает замыкаться через магнитопровод, создавая в зазорах δ1 и δ2 усилия, возвращающие якорь в исходное положение.
В заявляемой магнитной системе в процессе срабатывания, для формирования момента вращения (либо продольного перемещения) на якоре присутствуют одновременно два согласованных усилия - на притягивание с одной стороны и отталкивания с другой. Данный факт позволяет сохранять высокий момент вращения (либо усилие перемещения) якоря на всем протяжении хода, т.к. при уменьшении силы отталкивания с одной стороны растет сила притягивания с другой.
Увеличение хода якоря осуществляется благодаря использованию одновременно и согласованно притягивающих усилий полюсных наконечников якоря со стороны без магнита, и отталкивающие усилия полюсных наконечников якоря со стороны с магнитом. Сама регулировка величины хода осуществляется с помощью пластины с продольным пазом и винтами крепления пластины к магнитопроводу электромагнита.
Использование данной магнитной системы одинаково эффективно при проектировании как сильноточных контакторов или реле, так и миниатюрных устройств с большой величиной хода якоря, позволяющей в малых габаритах изделия значительно повысить коммутируемые мощности при повышенных напряжениях. Наличие больших величин хода якоря в одностабильных магнитных системах также как в двустабильных позволяет использовать вспомогательные контакты для обеспечения в процессе срабатывания переключений обмоток из форсированного режима в удерживающий с целью снижения потребления в статическом режиме после срабатывания.
На базе заявляемого технического решения спроектированы, изготовлены и испытаны виброудароустойчивые расцепители независимые (РН) и расцепители минимального напряжения (РМН) используемые в новых разработках автоматических выключателей для военной техники серий: ВА15-063, ВА16-160, 250, 400, 630, ВА16М-160, 250, 400, 630, и серия автоматических выключателей гражданского исполнения ВА17М-160, 250, 400, 630 для применения на судах с учетом требований Российского Морского регистра судоходства.
На базе заявляемого технического решения и прототипа в настоящее время ведутся разработки виброудароустойчивых поляризованных малогабаритных реле и дистанционных переключателей с высокой коммутационной способностью. Основное назначение изделий - для коммутации цепей переменного и постоянного тока в системах электроснабжения, автоматики и управления бортовых электроэнергетических систем ракетных и космических объектов, авиационных, корабельных и других автономных объектов с ограниченными энергоресурсами, эксплуатируемых в тяжелых условиях, а также для применения в новых разработках подводных и летательных беспилотных аппаратов.
Также на базе заявляемого технического решения в настоящее время ведется разработка электромагнитного дистанционного привода для выше упомянутых серий автоматических выключателей.
Источники информации
1. Гордон А.В. Поляризованные электромагниты [Текст] / А.В. Гордон, А.Г. Сливинская - М.: Энергия, 1964. - С. 13.
2. Ройзен В.З. Малогабаритные поляризованные реле и дистанционные переключатели [Текст] / В.З. Ройзен - Л.: Энергоатомиздат. Ленингр. отд-ние, 1969. - С. 5-6.
3. Сливинская А.Г. Электромагниты и постоянные магниты [Текст] / А.Г. Сливинская - М.: Энергия, 1972. - С. 178.
4. Ройзен В.З. Электромагнитные малогабаритные реле [Текст] / В.З. Ройзен - Л.: Энергоатомиздат. Ленингр. отд-ние, 1986. - С. 15.
5. Основы теории электрических аппаратов [Текст] / [Б.К. Буль] Под ред. Г.В. Буткевича - М.: Высшая школа, 1970. - С. 298-303.
6. Витенберг М.И. Расчет электромагнитных реле. Энергия 1975 г.
7. Патент RU 2683575 С1, опубликован 29.03.2019, бюл. №10
8. А.В. Гордон, Б.Ф. Ивакин, К.В. Костицына, А.Г. Сливинская, Анализ электромагнитных систем повышенной чувствительности в аппаратах с самовозвратом. // Техника средств связи, выпуск 6 серия Техника проводной связи, 1986. С. 62-81, - УДК 621.318.3.014.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |
| ПОЛЯРИЗОВАННОЕ МАЛОГАБАРИТНОЕ ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2018 |
|
RU2713475C1 |
| ПОЛЯРИЗОВАННОЕ ОДНООБМОТОЧНОЕ ЭЛЕКТРОМАГНИТНОЕ РЕЛЕ | 2020 |
|
RU2742722C1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2016 |
|
RU2653532C2 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2004 |
|
RU2298243C2 |
| СПОСОБ УПРАВЛЕНИЯ МАГНИТНЫМ ПОТОКОМ И ЭЛЕКТРОМАГНИТНАЯ ПОЛЯРИЗОВАННАЯ СИСТЕМА С ПОСТОЯННЫМ МАГНИТОМ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2687230C1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2009 |
|
RU2397567C1 |
| Поляризованный электромагнит | 1990 |
|
SU1760576A1 |
| Электромагнит сверхтока | 2017 |
|
RU2672579C1 |
| ПОЛЯРИЗОВАННЫЙ БЫСТРОДЕЙСТВУЮЩИЙ ЭЛЕКТРОМАГНИТ | 2022 |
|
RU2795269C1 |
Изобретение относится к электротехнике. Техническим результатом является расширение области применения магнитной системы поляризованного электромагнита при одновременной универсальности конструктивного исполнения как для двустабильного исполнения, так и одностабильного поляризованного длинноходового электромагнита с самовозвратом. В поляризованном электромагните с последовательной магнитной цепью, поворотный якорь выполнен с одной стороны «активным», содержащим постоянный магнит с полюсным наконечником, а с другой - содержащим «пассивный» элемент с полюсным наконечником с возможностью одновременного и согласованного использования притягивающих усилий полюсных наконечников якоря со стороны без магнита, и отталкивающих усилий полюсных наконечников якоря со стороны с магнитом. Полюсные наконечники, расположены равноудалено и параллельно относительно оси вращения, расположенной параллельно обмотке, находящейся на средней части Н-образного магнитопровода, таким образом, что якорь притянут только к одной из двух сторон Н-образного магнитопровода, полюсные наконечники якоря содержат собственные оси вращения и выполнены с возможностью самоустанавливаться на полюсах магнитопровода в конечных положениях, якорь и магнитопровод соединены с возможностью регулировки величины хода якоря. 3 з.п. ф-лы, 5 ил.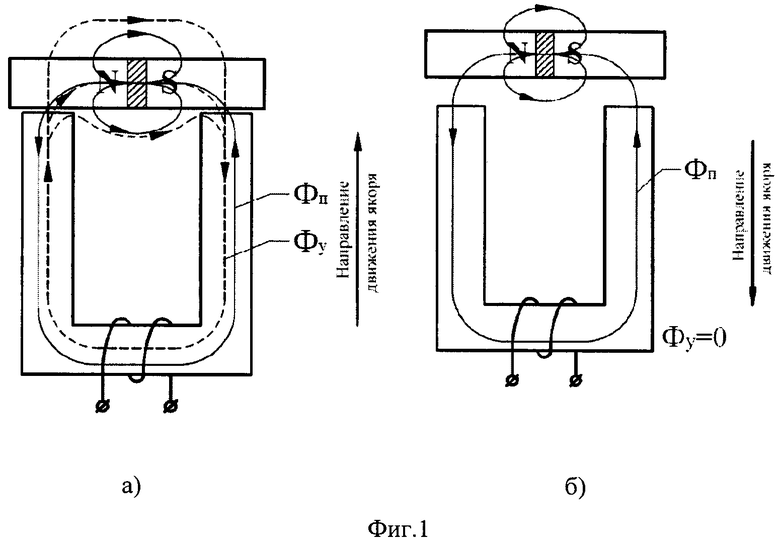
1. Поляризованный электромагнит, содержащий поворотный якорь с постоянными магнитами и полюсными наконечниками, расположенными равноудалено и параллельно относительно оси вращения, расположенной параллельно обмотке, находящейся на средней части Н-образного магнитопровода, таким образом, что якорь притянут только к одной из двух сторон Н-образного магнитопровода, полюсные наконечники якоря содержат собственные оси вращения и выполнены с возможностью самоустанавливаться на полюсах магнитопровода в конечных положениях, якорь и магнитопровод соединены с возможностью регулировки величины хода якоря, отличающийся тем, что якорь выполнен с одной стороны «активным», содержащим постоянный магнит с полюсными наконечниками, а с другой - содержащим «пассивный» элемент с полюсными наконечниками с возможностью одновременного и согласованного использования притягивающих усилий полюсных наконечников якоря со стороны без магнита, и отталкивающих усилий полюсных наконечников якоря со стороны с магнитом.
2. Поляризованный электромагнит по п. 1, отличающийся тем, что якорь выполнен прямоходовым.
3. Поляризованный электромагнит по п. 1, отличающийся тем, что «пассивный элемент» якоря выполнен в виде вставки из магнитопроводящего материала.
4. Поляризованный электромагнит по п. 1, отличающийся тем, что «пассивный элемент» якоря выполнен в виде цельноизготовленной части якоря.
| ПОЛЯРИЗОВАННЫЙ ДВУСТАБИЛЬНЫЙ ДЛИННОХОДОВОЙ ЭЛЕКТРОМАГНИТ СО СДВОЕННОЙ ПОСЛЕДОВАТЕЛЬНОЙ МАГНИТНОЙ ЦЕПЬЮ | 2018 |
|
RU2683575C1 |
| ПОЛЯРИЗОВАННЫЙ ЭЛЕКТРОМАГНИТ | 2016 |
|
RU2653532C2 |
| ПАТРОН ДЛЯ ЗАХВАТА ПРОТЯЖКИ | 0 |
|
SU160641A1 |
| Аппарат для автоматического выделения проб зерна | 1923 |
|
SU2703A1 |
| US 4644311 A1, 17/02/1987. | |||

