Изобретение относится к области вычислительной техники, а именно к устройствам сбора, обработки и передачи данных, и может использоваться в составе автоматизированных информационно-измерительных и управляющих систем в различных отраслях деятельности, в том числе на морском и речном транспорте.
Из существующего уровня техники известно устройство сбора, обработки и передачи данных, содержащее вторичный преобразователь напряжения питания, микроконтроллер с часами реального времени, осуществляющий сбор измерительной информации при помощи модуля ввода дискретных сигналов, обработку и передачу информации через преобразователи сигналов интерфейсов RS-232, энергонезависимую память, модуль индикации, супервизор питания и литиевую батарею (патент RU 59861 U1, 05.06.2006, опубликовано 27.12.2006, бюл. №36).
Недостатком известного устройства является отсутствие в его составе мер защиты от умышленной фальсификации измеренных значений и от несанкционированного вскрытия или преднамеренного повреждения корпуса прибора, что снижает уровень достоверности полученных данных.
Указанные недостатки частично устранены в известном устройстве, содержащем микроконтроллер, осуществляющий сбор, обработку и передачу измерительной информации, модуль часов реального времени, сообщающий микроконтроллеру точное астрономическое время, энергонезависимую память большой емкости для хранения конфигурации устройства и собранной микроконтроллером информации, отличающемся тем, что оно снабжено модулем беспроводного интерфейса GPRS, сменным модулем интерфейсов PLC, Zigbee (патент RU 99203 U1, 30.04.2010, опубликовано 10.11.2010, бюл. №31).
Недостатком известного устройства является отсутствие мер защиты от умышленной фальсификации измеренных значений и от несанкционированного вскрытия или преднамеренного повреждения корпуса прибора снижает достоверность полученных данных.
Известно устройство, выполненное в виде корпуса в котором установлена печатная плата с размещенным на ней микроконтроллером с энергонезависимой памятью, причем корпус снабжен средствами крепления к горизонтальной или вертикальной опорной поверхности и снабжен гнездом сетевого кабеля для подключения к 10/100Base-TX коммутатору (патент RU 2348966 С1, 21.02.2008, опубликовано 10.03.2009, бюл. №7).
Отсутствие в известном устройстве высокоскоростного универсального радиоканала LTE/UMTS/GSM сужает область его применения, а отсутствие мониторинга ступеней выхода за установленные территориальные ограничения движения транспортного средства и характера управления подвижным транспортным объектом, мер защиты от фальсификации измеренных значений и от несанкционированного вскрытия или повреждения корпуса применительно к морскому и речному транспорту существенно снижает эффективность данного устройства.
Наиболее близким к предлагаемому изобретению является устройство сбора, обработки и передачи телеметрической информации, содержащее корпус с возможностью крепления на горизонтальную и вертикальную поверхность, печатную плату, на которой расположены блок питания с супервизором питания, микроконтроллер с оперативной и постоянной памятью, часы реального времени со встроенной энергонезависимой памятью и литиевой батареей резервного питания, блок интерфейса USB, сменный модуль интерфейсов PLC, ZigBee, WiFi, блок высокоскоростного универсального модема четвертого поколения LTE/UMTS/GSM с антенной, блок формирования уникального 64-битного серийного номера устройства и блок защиты от несанкционированного вскрытия или умышленного повреждения корпуса устройства (патент RU 2449346 С1, 01.04.2011, опубликовано 27.04.2012, бюл. №12) (прототип).
Недостатком устройства является отсутствие мониторинга ступеней выхода за установленные территориальные ограничения движения транспортного средства и характера управления подвижным транспортным объектом применительно к морскому и речному транспорту, что существенно снижает эффективность данного устройства.
Задача, на решение которой направлено заявленное техническое устройство, заключается в увеличении области применения заявленного многофункционального устройства сбора, обработки и передачи телеметрической информации за счет мониторинга ступеней выхода за установленные территориальные ограничения движения транспортного средства.
Решение поставленной задачи достигается за счет того, что в многофункциональное устройство сбора, обработки и передачи телеметрической информации, содержащее корпус с возможностью крепления на горизонтальную и вертикальную поверхность, печатную плату, на которой расположены блок питания с супервизором питания, микроконтроллер с оперативной и постоянной памятью, к которому присоединены часы реального времени со встроенной энергонезависимой памятью и литиевой батареей резервного питания, блок интерфейса USB, сменный модуль интерфейсов PLC, ZigBee, WiFi, блок высокоскоростного универсального модема четвертого поколения LTE/UMTS/GSM с антенной, блок формирования уникального 64-битного серийного номера устройства и блок защиты от несанкционированного вскрытия или умышленного повреждения корпуса устройства, дополнительно введены блок спутникового модема IRIDIUM с антенной, блок спутникового модема GPS/ГЛОНАСС с антенной, акселерометр, таймер периодов обработки, первый и второй блоки малых отклонений от заданной акватории нахождения судна, первый и второй блоки больших отклонений от заданной акватории нахождения судна, первый и второй блоки выхода за установленные пределы и покидания судном заданной акватории, блок хранения и задания установленных пределов и параметров вождения судном, флеш-карта мониторинга эффективности управления судном, датчик расхода топлива, делитель, блок сравнения расхода топлива, датчик оборотов двигателя, блок сравнения оборотов, датчики бортовой и килевой качки, блоки сравнения бортовой и килевой качки, задатчик допустимого напряжения питания, блок сравнения заряда батарей, многовходовой логический элемент «ИЛИ», блок защиты от хищения устройства и магниты крепления корпуса, причем блок спутникового модема IRIDIUM с антенной соединен с микроконтроллером, первый вход блока сравнения заряда батарей соединен с задатчиком допустимого напряжения питания, второй вход с блоком питания, а выход с микроконтроллером и многовходовым логическим элементом «ИЛИ», таймер периодов обработки соединен с микроконтроллером, выход координаты широты блока спутникового модема GPS/ГЛОНАСС соединен со вторыми входами первого блока малых отклонений от заданной акватории нахождения судна, первого блока больших отклонений от заданной акватории нахождения судна и первого блока выхода за установленные пределы и покидания судном заданной акватории, выход координаты долготы блока спутникового модема GPS/ГЛОНАСС соединен со вторыми входами второго блока малых отклонений от заданной акватории нахождения судна, второго блока больших отклонений от заданной акватории нахождения судна и второго блока выхода за установленные пределы и покидания судном заданной акватории, выход координаты пройденного расстояния блока спутникового модема GPS/ГЛОНАСС соединен со вторым входом делителя, выходы блока хранения и задания установленных пределов и параметров вождения судна соединены с первыми входами первого блока малых отклонений от заданной акватории нахождения судна, первого блока больших отклонений от заданной акватории нахождения судна и первого блока выхода за установленные пределы и покидания судном заданной акватории, выходы блока хранения и задания установленных пределов и параметров вождения судна соединены с первыми входами второго блока малых отклонений от заданной акватории нахождения судна, второго блока больших отклонений от заданной акватории нахождения судна и второго блока выхода за установленные пределы и покидания судном заданной акватории, вход блока хранения и задания установленных пределов и параметров вождения судна соединен с микроконтроллером, входы блока спутникового модема GPS/ГЛОНАСС соединены с акселерометром и микроконтроллером, первый вход делителя соединен с датчиком расхода топлива, первые входы блоков сравнения расхода топлива, оборотов двигателя, бортовой и килевой качки соединены с выходами блока хранения и задания установленных пределов и параметров вождения судна, вторые входы блоков сравнения расхода топлива, оборотов двигателя, бортовой и килевой качки соединены с выходами делителя, датчиков оборотов двигателя, датчиков бортовой и килевой качки соответственно, выходы координат широты, долготы и пройденного расстояния блока спутникового модема GPS/ГЛОНАСС, датчиков расхода топлива, оборотов двигателя, бортовой и килевой качки соединены с входами флеш-карты мониторинга эффективности управления судном и микроконтроллера, выходы акселерометра, первых и вторых блоков малых и больших отклонений от заданной акватории нахождения судна и блоков выхода за установленные пределы и покидания судном заданной акватории, блоков сравнения расхода топлива, оборотов двигателя, бортовой и килевой качки соединены с входами многовходового логического элемента «ИЛИ» и микроконтроллера, выход многовходового логического элемента «ИЛИ» соединен с микроконтроллером и флеш-картой мониторинга эффективности управления судном, геркон блока защиты от хищения соединен с микроконтроллером, магниты закреплены на корпусе устройства.
Техническим результатом является увеличение области применения заявленного многофункционального устройства сбора, обработки и передачи телеметрической информации за счет мониторинга ступеней выхода за установленные территориальные ограничения движения транспортного средства.
В процессе проведенного поиска по источникам научно-технической и патентной информации не было обнаружено устройства, обладающего такой же совокупностью существенных признаков и обеспечивающего заявленный выше технический результат.
На фигуре 1 приведена структура многофункционального устройства сбора, обработки и передачи телеметрических данных, на фигуре 2 приведена фотография устройства, на фигуре 3 показано размещение устройство на морском судне.
Устройство содержит корпус 1 с возможностью крепления на горизонтальную и вертикальную поверхность, печатную плату, на которой расположены блок питания 2 с супервизором 3 питания, микроконтроллер 4 с оперативной 5 и постоянной 6 памятью к которому присоединены часы реального времени 7 со встроенной энергонезависимой памятью и литиевой батареей резервного питания, блок интерфейса USB 8, сменный модуль интерфейсов PLC, ZigBee, WiFi 9, блок высокоскоростного универсального модема четвертого поколения LTE/UMTS/GSM 10 с антенной 11, блок формирования уникального 64-битного серийного номера 12 устройства, блок защиты от несанкционированного вскрытия 13 или умышленного повреждения корпуса устройства, блок спутникового модема IRIDIUM 14 с антенной 15, блок спутникового модема GPS/ГЛОНАСС 16 с антенной 17, акселерометр 18, таймер 19 периодов обработки, первый 20 и второй 21 блоки малых отклонений от заданной акватории нахождения судна, первый 22 и второй 23 блоки больших отклонений от заданной акватории нахождения судна, первый 24 и второй 25 блоки выхода за установленные пределы и покидания судном заданной акватории, блок хранения и задания установленных пределов и параметров вождения 26 судном, флеш-карта мониторинга эффективности управления 27 судном, датчик расхода 28 топлива, делитель 29, блок сравнения расхода 30 топлива, датчик оборотов 31 двигателя, блок сравнения оборотов 32, датчики бортовой 33 и килевой 34 качки, блоки сравнения бортовой 35 и килевой 36 качки, задатчик допустимого напряжения 37 питания, блок сравнения заряда батарей 38, многовходовой логический элемент «ИЛИ» 39, блок защиты от хищения 40 устройства и магниты 41 крепления корпуса 1.
Блок спутникового модема IRIDIUM 14 с антенной 15 соединен с микроконтроллером 4.
Первый вход блока сравнения заряда батарей 38 соединен с задатчиком допустимого напряжения 37 питания, второй вход с блоком питания 2, а выход соединен с микроконтроллером 4 и многовходовым логическим элементом «ИЛИ» 39. Таймер 19 периодов обработки соединен с микроконтроллером 4.
Выход координаты широты блока спутникового модема GPS/ГЛОНАСС 16 соединен со вторыми входами первого 20 блока малых отклонений от заданной акватории нахождения судна, первого 22 блока больших отклонений от заданной акватории нахождения судна и первого 24 блока выхода за установленные пределы и покидания судном заданной акватории.
Выход координаты долготы блока спутникового модема GPS/ГЛОНАСС 16 соединен со вторыми входами второго 21 блока малых отклонений от заданной акватории нахождения судна, второго 23 блока больших отклонений от заданной акватории нахождения судна и второго 25 блока выхода за установленные пределы и покидания судном заданной акватории.
Выход координаты пройденного расстояния блока спутникового модема GPS/ГЛОНАСС 16 соединен со вторым входом делителя 29.
Выходы блока хранения и задания установленных пределов и параметров вождения 26 судном соединены с первыми входами первого 20 блока малых отклонений от заданной акватории нахождения судна, первого 22 больших отклонений от заданной акватории нахождения судна и первого 24 блока выхода за установленные пределы и покидания судном заданной акватории, выходы блока хранения и задания установленных пределов и параметров вождения 26 судном соединены с первыми входами второго 21 блока малых отклонений от заданной акватории нахождения судна, второго 23 больших отклонений от заданной акватории нахождения судна и второго 25 блока выхода за установленные пределы и покидания судном заданной акватории. Вход блока хранения и задания установленных пределов и параметров вождения 26 судном соединен с микроконтроллером 4.
Входы блока спутникового модема GPS/ГЛОНАСС 16 соединены с акселерометром 18 и микроконтроллером 4.
Первый вход делителя 29 соединен с датчиком расхода 28 топлива, первые входы блоков сравнения расхода 30 топлива, оборотов 32 двигателя, бортовой 35 и килевой 36 качки соединены с выходами блока хранения и задания установленных пределов и параметров вождения 26 судном, вторые входы блоков сравнения расхода 30 топлива, оборотов 32 двигателя, бортовой 35 и килевой 36 качки соединены с выходами делителя 29, датчиков оборотов 31 двигателя, датчиков бортовой 33 и килевой 34 качки соответственно.
Выходы координат широты, долготы и пройденного расстояния блока спутникового модема GPS/ГЛОНАСС 16, датчиков расхода 28 топлива, оборотов 31 двигателя, бортовой 33 и килевой 34 качки соединены с входами с флеш-карты мониторинга эффективности управления 27 судном и микроконтроллера 4.
Выходы акселерометра 18, первых 20, 22, 24 и вторых 21, 23, 25 блоков малых и больших отклонений от заданной акватории нахождения судна и блоков выхода за установленные пределы и покидания судном заданной акватории, блоков сравнения расхода 30 топлива, оборотов 32 двигателя, бортовой 35 и килевой 36 качки соединены с входами многовходового логического элемента «ИЛИ» 39 и микроконтроллера 4.
Выход многовходового логического элемента «ИЛИ» 29 соединен с микроконтроллером 4 и флеш-картой мониторинга эффективности управления 27 судном.
Геркон блока защиты от хищения 40 соединен с микроконтроллером. Магниты 41 закреплены на корпусе 1.
Устройство работает следующим образом.
Напряжение питания постоянного тока от блока питания 2 подается на микроконтроллер 4 с оперативной 5 и постоянной 6 памятью. При включении супервизор 3 питания снимет с микроконтроллера 4 сигнал сброса и микроконтроллер 4 производит загрузку из постоянной 6 памяти в оперативную 5 память программные компоненты и устройство переходит в рабочий режим.
В рабочем режиме блок спутникового модема IRIDIUM 14 с антенной 15 обеспечивает передачу и прием информации от центра мониторинга эффективности управления транспортным средством (на фигуре не показан), и, в первую очередь, к морскому и речному транспорту (далее судно). Система IRIDIUM выбрана на том основании, что она обеспечивает непрерывную передачу данных по всей территории земного шара, в отличие от других систем, обеспечивающих лишь частичное покрытие территорий.
Через блок спутникового модема IRIDIUM 14 с антенной 15 от центра мониторинга эффективности управления судном поступают ограничительные значения, которые записываются в блок хранения и задания установленных пределов и параметров вождения 26 судном.
Затем сигналы с выходов блока хранения и задания установленных пределов и параметров вождения 26 судном поступают на первые входы первого 20 и второго 21 блоков малых отклонений от заданной акватории нахождения судна, где сравниваются с текущими координатами положения судна, поступающими с выходов блока спутникового модема GPS/ГЛОНАСС 16 с антенной 17 на первые входы первого 20 и второго 21 блоков малых отклонений от заданной акватории нахождения судна. Если текущие координаты судна не выходят за пределы малых отклонений от заданной акватории нахождения судна, где оно должно находится, то на выходах первого 20 и второго 21 блоков малых отклонений от заданной акватории нахождения судна сигналы не формируются. Если судно вышло из заданной акватории нахождения судна за указанные пределы малых отклонений, то на выходах первого 20 и второго 21 блоков малых отклонений от заданной акватории нахождения судна формируются сигналы, поступающие в микроконтроллер 4 и многовходовой логический элемент «ИЛИ» 39, который формирует сигнал выхода за установленные пределы от заданной акватории нахождения судна.
По этому сигналу микроконтроллер 4 через блок спутникового модема IRIDIUM 14 с антенной 15 передает данные о нарушении установленных пределов от заданной акватории нахождения судна и параметров вождения в центр мониторинга эффективности управления транспортным средством.
При больших отклонениях текущего положения судна от заданной акватории нахождения судна, допустимые и текущие координаты судна сравниваются на первом 22 и втором 23 блоках больших отклонений от заданной акватории нахождения судна и на выходах формируются сигналы, поступающие в микроконтроллер 4 и многовходовой логический элемент «ИЛИ» 39. В результате микроконтроллер 4 через блок спутникового модема IRIDIUM 14 с антенной 15 передает данные о нарушении установленных пределов от заданной акватории нахождения судна и параметров вождения в центр мониторинга эффективности управления транспортным средством.
При покидании судном заданной акватории на выходах первого 24 и второго 25 блоков выхода за установленные пределы и покидания судном заданной акватории формируются сигналы, поступающие в микроконтроллер 4 и многовходовой логический элемент «ИЛИ» 39. В результате микроконтроллер 4 через блок спутникового модема IRIDIUM 14 с антенной 15 передает данные о покидании судном заданной акватории в центр мониторинга эффективности управления транспортным средством.
Нахождение судна в положении стоянки или движения определяется акселерометром 18. Если судно находится в положении и стоянки, то на выходе акселерометра 18 сигнал не формируется, блок спутникового модема GPS/ГЛОНАСС 16 не опрашивается, данные не передаются, что обеспечивает снижение затрат на трафик спутниковой связи и экономию заряда батарей электропитания.
В момент начала движения судна на выходе акселерометра 18 формируется сигнал, поступающий на активацию блока спутникового модема GPS/ГЛОНАСС 16, микроконтроллер 4 и многовходовой логический элемент «ИЛИ» 39. В результате микроконтроллер 4 через блок спутникового модема IRIDIUM 14 с антенной 15 передает данные в центр мониторинга эффективности управления транспортным средством о начале движения судна.
Выход параметров вождения за установленные пределы, характеризующие манеру вождения судна экипажем, контролируется блоком сравнения расхода 30 топлива, блоком сравнения оборотов 32, блоком сравнения бортовой 35 качки и блоком сравнения килевой 36 качки, на вторые входы которых подаются сигналы максимально допустимых значений с выходов блока хранения и задания установленных пределов и параметров вождения 26 судном. На первые входы блоков сравнения расхода 30 топлива, оборотов 32 двигателя, бортовой 35 и килевой 36 качки поступают сигналы с выходов делителя 29, датчиков оборотов 31 двигателя, датчиков бортовой 33 и килевой 34 качки соответственно.
На первый вход делителя 29 поступает сигнал от блока спутникового модема GPS/ГЛОНАСС 16 о пройденном расстоянии, на второй вход - от датчика расхода 28 топлива, в результате на выходе формируется сигнал расхода топлива на единицу пройденного пути. Этот сигнал сравнивается с допустимым значением на блоке сравнения расхода 30 топлива, и, в случае превышения допустимого расхода топлива, на его выходе формируется сигнал, поступающий на микроконтроллер 4 и многовходовой логический элемент «ИЛИ» 39. В результате микроконтроллер 4 через блок спутникового модема IRIDIUM 14 передает данные о нарушении допустимого значения расхода топлива в центр мониторинга эффективности управления транспортным средством.
В случае превышения допустимых оборотов двигателя судна, установленных значений бортовой и килевой качки, сигналы, поступающие с датчиков оборотов 31 двигателя, бортовой 33 и килевой 34 качки сравниваются на блоках сравнения оборотов 32, бортовой 35 и килевой 36 качки с допустимыми значениями, заданными посредством блока хранения и задания установленных пределов и параметров вождения 26 судном и на выходах блоков сравнения формируются сигналы, поступающие на микроконтроллер 4 и многовходовой логический элемент «ИЛИ» 39 соответственно. В результате микроконтроллер 4 через блок спутникового модема IRIDIUM 14 передает данные о превышении указанных параметров в центр мониторинга эффективности управления транспортным средством.
На протяжении всего транспортного пути параметры вождения судна и факт выхода этих параметров за заданные пределы записываются с фиксацией времени на флеш-карту мониторинга эффективности управления 27 судном для последующей обработки в центре мониторинга эффективности управления транспортным средством.
В случае отсутствия фактов выхода текущих значений вождения судна за установленные центром мониторинга эффективности управления транспортным средством пределы и параметры вождения, опрос параметров инициируется таймером 19 периодов обработки ежесуточно или через предварительно определенные промежутки времени.
Величина напряжения (разряда батарей) блока питания 2 контролируется на блоке сравнения заряда батарей 38 посредством его сравнения с напряжением задатчика допустимого напряжения 37 питания.
В случае снижения напряжения питания ниже заданного значения на выходе блока сравнения заряда батарей 38 формируется сигнал, поступающий на микроконтроллер 4 и многовходовой логический элемент «ИЛИ» 39. В результате микроконтроллер 4 через блок спутникового модема IRIDIUM 14 передает данные о снижении напряжения питания ниже допустимого значения.
Блоки формирования уникального 64-битного серийного номера 12 устройства, защиты от несанкционированного вскрытия 13 предназначены для предупреждения замены или умышленного повреждения корпуса устройства.
Корпус 1 устройства крепится на горизонтальную и вертикальную металлические поверхности с помощью магнитов 41, закрепленных на корпусе 1. При этом магнитный поток от магнитов 41 приводит к замыканию геркона блока защиты от хищения 40. При попытке снятия или замены устройства магнитный поток от магнитов 41 прерывается, контакты геркона блока защиты от хищения 40 размыкаются, и формируется сигнал попытки снятия, замены, несанкционированного вскрытия или умышленного повреждения корпуса устройства.
В результате при попытке снятия, замены, несанкционированного вскрытия или умышленного повреждения корпуса устройства срабатывает блок защиты от несанкционированного вскрытия 13 или геркон блока защиты от хищения 40, сигналы поступают на микроконтроллер 4 и через блок спутникового модема IRIDIUM 14 соответствующий сигнал передается в центр мониторинга эффективности управления транспортным средством.
В случае нахождения судна в зоне действия других сетей связи, кроме IRIDIUM, микроконтроллер 4 подключает блок высокоскоростного универсального модема четвертого поколения LTE/UMTS/GSM 10 с антенной 11 или сменный модуль интерфейсов PLC, ZigBee, WiFi 9 для снижения затрат на трафик. Блок интерфейса USB 8 обеспечивает программирование микроконтроллера 4 и занесения программ в постоянную 6 память. Синхронизацию работы устройства обеспечивают часы реального времени 7 со встроенной энергонезависимой памятью и литиевой батареей резервного питания.
Предлагаемое многофункциональное устройство сбора, обработки и передачи телеметрической информации может быть практически реализовано с использованием материалов и комплектующих изделий различных изготовителей. Проведенные испытания устройства подтвердили заявленный технический результат.
Такое техническое решение обеспечивает увеличение области применения заявленного многофункционального устройства сбора, обработки и передачи телеметрической информации за счет мониторинга ступеней выхода за установленные территориальные ограничения движения транспортного средства и, в первую очередь, морских и речных судов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2573626C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2439614C2 |
| Аппаратный комплекс телеметрии с высокой степенью автономности для сбора и передачи потоковых и телеметрических данных посредством самоорганизующихся беспроводных сетей, включающих спутниковый сегмент | 2022 |
|
RU2788302C1 |
| Способ контроля промысла водных биологических ресурсов, мониторинговый навигационно-связной комплекс промыслового судна и центр обработки данных для осуществления способа | 2016 |
|
RU2624361C1 |
| СИСТЕМА МОНИТОРИНГА ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2022 |
|
RU2800560C1 |
| ФАЗОВЫЙ ГИДРОЛОКАТОР БОКОВОГО ОБЗОРА | 2012 |
|
RU2510045C2 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |



Изобретение относится к устройствам сбора, обработки и передачи данных и может использоваться, например, на морском и речном транспорте. Технический результат состоит в увеличении области применения заявленного многофункционального устройства сбора, обработки и передачи телеметрической информации за счет мониторинга ступеней выхода за установленные территориальные ограничения движения транспортного средства. Для этого устройство содержит микроконтроллер, спутниковый модем IRIDIUM, модем GPS/ГЛОНАСС, акселерометр, таймер периодов обработки, блок интерфейса USB, модуль интерфейсов PLC, ZigBee, WiFi, блок модема LTE/UMTS/GSM, первые и вторые блоки малых и больших отклонений и выхода за установленные пределы, блок хранения и задания установленных пределов и параметров вождения, флеш-карту мониторинга эффективности управления, датчики и блоки сравнения расхода топлива, оборотов двигателя, бортовой и килевой качки, многовходовой логический элемент «ИЛИ», блок формирования серийного номера, блок защиты от несанкционированного вскрытия и хищения устройства, магниты крепления корпуса и блок питания. 3 ил.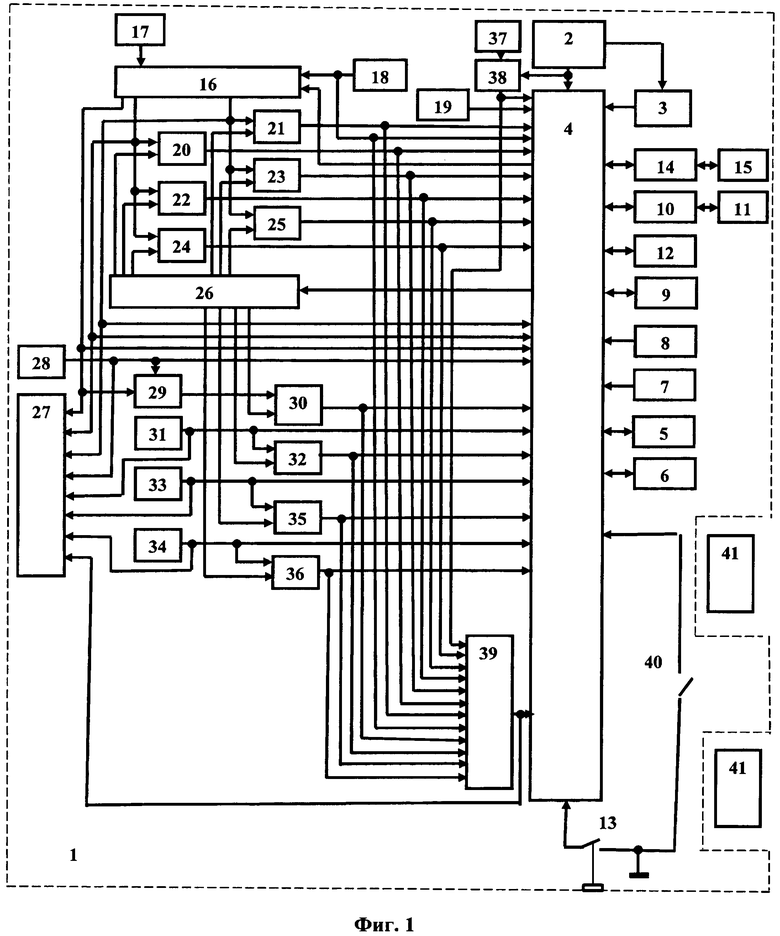
Многофункциональное устройство сбора, обработки и передачи телеметрической информации, содержащее корпус с возможностью крепления на горизонтальную и вертикальную поверхность, печатную плату, на которой расположены блок питания с супервизором питания, микроконтроллер с оперативной и постоянной памятью, к которому присоединены часы реального времени со встроенной энергонезависимой памятью и литиевой батареей резервного питания, блок интерфейса USB, сменный модуль интерфейсов PLC, ZigBee, WiFi, блок высокоскоростного универсального модема четвертого поколения LTE/UMTS/GSM с антенной, блок формирования уникального 64-битного серийного номера устройства и блок защиты от несанкционированного вскрытия или умышленного повреждения корпуса устройства, отличающееся тем, что в устройство дополнительно введены блок спутникового модема IRIDIUM с антенной, блок спутникового модема GPS/ГЛОНАСС с антенной, акселерометр, таймер периодов обработки, первый и второй блоки малых отклонений от заданной акватории нахождения судна, первый и второй блоки больших отклонений от заданной акватории нахождения судна, первый и второй блоки выхода за установленные пределы и покидания судном заданной акватории, блок хранения и задания установленных пределов и параметров вождения судном, флеш-карта мониторинга эффективности управления судном, датчик расхода топлива, делитель, блок сравнения расхода топлива, датчик оборотов двигателя, блок сравнения оборотов, датчики бортовой и килевой качки, блоки сравнения бортовой и килевой качки, задатчик допустимого напряжения питания, блок сравнения заряда батарей, многовходовой логический элемент «ИЛИ», блок защиты от хищения устройства и магниты крепления корпуса, причем блок спутникового модема IRIDIUM с антенной соединен с микроконтроллером, первый вход блока сравнения заряда батарей соединен с задатчиком допустимого напряжения питания, второй вход с блоком питания, а выход с микроконтроллером и многовходовым логическим элементом «ИЛИ», таймер периодов обработки соединен с микроконтроллером, выход координаты широты блока спутникового модема GPS/ГЛОНАСС соединен со вторыми входами первого блока малых отклонений от заданной акватории нахождения судна, первого блока больших отклонений от заданной акватории нахождения судна и первого блока выхода за установленные пределы и покидания судном заданной акватории, выход координаты долготы блока спутникового модема GPS/ГЛОНАСС соединен со вторыми входами второго блока малых отклонений от заданной акватории нахождения судна, второго блока больших отклонений от заданной акватории нахождения судна и второго блока выхода за установленные пределы и покидания судном заданной акватории, выход координаты пройденного расстояния блока спутникового модема GPS/ГЛОНАСС соединен со вторым входом делителя, выходы блока хранения и задания установленных пределов и параметров вождения судном соединены с первыми входами первого блока малых отклонений от заданной акватории нахождения судна, первого блока больших отклонений от заданной акватории нахождения судна и первого блока выхода за установленные пределы и покидания судном заданной акватории, выходы блока хранения и задания установленных пределов и параметров вождения судном соединены с первыми входами второго блока малых отклонений от заданной акватории нахождения судна, второго блока больших отклонений от заданной акватории нахождения судна и второго блока выхода за установленные пределы и покидания судном заданной акватории, вход блока хранения и задания установленных пределов и параметров вождения судном соединен с микроконтроллером, входы блока спутникового модема GPS/ГЛОНАСС соединены с акселерометром и микроконтроллером, первый вход делителя соединен с датчиком расхода топлива, первые входы блоков сравнения расхода топлива, оборотов двигателя, бортовой и килевой качки соединены с выходами блока хранения и задания установленных пределов и параметров вождения судном, вторые входы блоков сравнения расхода топлива, оборотов двигателя, бортовой и килевой качки соединены с выходами делителя, датчиков оборотов двигателя, датчиков бортовой и килевой качки соответственно, выходы координат широты, долготы и пройденного расстояния блока спутникового модема GPS/ГЛОНАСС, датчиков расхода топлива, оборотов двигателя, бортовой и килевой качки соединены с входами флеш-карты мониторинга эффективности управления судном и микроконтроллера, выходы акселерометра, первых и вторых блоков малых и больших отклонений от заданной акватории нахождения судна и блоков выхода за установленные пределы и покидания судном заданной акватории, блоков сравнения расхода топлива, оборотов двигателя, бортовой и килевой качки соединены с входами многовходового логического элемента «ИЛИ» и микроконтроллера, выход многовходового логического элемента «ИЛИ» соединен с микроконтроллером и флеш-картой мониторинга эффективности управления судном, геркон блока защиты от хищения соединен с микроконтроллером, магниты закреплены на корпусе устройства.
| ГЕРМЕТИЗИРОВАННАЯ КАТУШКА ИНДУКТИВНОСТИ, НАСТРАИВАЕМАЯ НА ЗАДАННЫЙ НОМИНАЛ | 1954 |
|
SU110068A1 |
| US 20040056779 A1, 25.03.2004 | |||
| US 9143392 B2, 22.09.2015 | |||
| US 20170086011 A1, 23.03.2017 | |||
| WO 2015130786 A1, 03.09.2015. | |||

