Изобретение относится к гидрографии, в частности, к способам и техническим средствам съемки рельефа дна путем определения глубин на заданной акватории с определением их геодезических координат.
Известен способ съемки рельефа дна акватории эхолотом [1], включающий прохождение судном с установленным на нем эхолотом заданными галсами на акватории, излучение гидроакустических сигналов в сторону дна, прием отраженных от дна сигналов, измерение расстояний от приемоизлучающей антенны эхолота до отражающей поверхности (точек дна), определение географических координат судна, определение геодезических координат приемоизлучающей антенны эхолота, измерение параметров бортовой, килевой и вертикальной качки, истинного курса и скорости судна, определение истинных значений глубин и их геодезических координат с последующей их регистрацией и индикацией.
Известно также устройство для осуществления данного способа, представляющее собой эхолот [2], содержащий приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок управления, блок регистрации, обработки картирования рельефа дна, в котором выход приемоизлучающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизлучающего блока подключены к входу блока регистрации, обработки и картирования рельефа дна, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна.
Существенными недостатками известного способа и устройства являются сравнительно невысокая точность съемки рельефа дна акватории, не удовлетворяющая предъявляемым требованиям к гидрографической съемке (см., например: Правила гидрографической службы №4 (ПГС №4 - Съемка рельефа дна, часть 2 - Требования и методы), Л., ГУНиО МО СССР, 1984), а также существенная трудоемкость выполнения способа, что обусловлено необходимостью выполнения вычислений, связанных с определением поправок за отклонение действительной средней скорости звука в воде от используемых в вычислениях расчетных значений средней скорости звука в воде для конкретного эхолота, определяемой косвенным путем по измеренным значениям температуры, солености и плотности морской воды на принятых в практике стандартных горизонтах по глубине или путем непосредственного измерения скорости звука в равномерно распределенных точках по всей площади акватории.
Ввиду того, что требуемая достоверность определения средней скорости звука расчетным путем обеспечивается только в малой локальной пространственной области, в которой измеряется температура, соленость и плотность морской воды или непосредственно скорость распространения звука в воде для конкретного эхолота, то точность съемки рельефа дна в конечном итоге отягощается погрешностью, обусловленной влиянием мелкомасштабной и крупномасштабной изменчивостью во времени ветрового перемещения и турбулентности внутренних волн, подводных течений. Эта погрешность может достигать 3% от измеряемой глубины (см., например: D.E.Dinn, B.D.Loncarevic. The effect of so und velocity errors on multibeam sonar depth accuracy // Proccedings of American Hydrograhic Symposium. 1995, p.1001-1009).
В соответствии с требованиями стандарта Международной гидрографической организации (см., например: // Записки по гидрографии. СПб., ГУНиО МО РФ, №248, 1999, с.27-32) на акваториях с глубинами свыше 200 м, на которых выполняется съемка в интересах безопасности судоходства, средняя квадратичная погрешность (СКП) определения глубины не должна превышать 0,3%.
При использовании известного способа съемки рельефа и устройства для его осуществления СКП определения глубины составляет для глубин до 100 м от 0,7 до 3,5 м, а для глубин до 200 м от 2,3 до 11,0 м соответственно, что не удовлетворяет предъявляемым требованиям.
Известны также способы съемки рельефа дна с использованием многолучевого эхолота [3, 4, 5], которые включают вождение судна-носителя многолучевого эхолота (МЛЭ) по заданному маршруту (запланированным съемочным галсам); излучение гидроакустических сигналов до дна и прием отраженных эхосигналов от дна в зоне зондирования; измерение расстояний от антенны до мест отражения от поверхности дна данных сигналов МЛЭ; определение геодезических координат центра приема антенны судового приемника навигационного средства определения места судна; измерение параметров бортовой, килевой и вертикальной качек судна носителя МЛЭ судовым навигационным комплексом; фиксацию времени момента приема отраженных эхосигналов и момента обсервации судна-носителя; вычисление по полученным данным глубин акватории и их геодезических координат, а также определение необходимых к ним поправок.
Недостатком данных способов является то, что они имеют недостаточно высокую точность и сложны в использовании. Это объясняется тем, что при их использовании локально определяемая общая поправка к измеряемым с помощью эхолота глубинам принимается неизменной для всего района съемки. Вследствие пространственно-временной изменчивости гидрологических условий значение средней скорости звука в воде, используемое для расчета глубины, будет отличаться от фактического значения в точке измерения глубины. Следовательно, в измеренные эхолотом расстояния до дна будет вноситься систематическая погрешность, которая имеет существенную величину и не может быть исключена в принятом подходе к ее учету в существующих способах съемки.
Известные способы, приближенно решают задачу учета высоты мгновенного уровня по его измерениям на удаленном от места измерения, глубины на уровневом посту. Вследствие волнения и наклона уровневой поверхности мгновенный уровень по высоте будет отличаться от наблюдаемого на уровневом посту, что будет вносить дополнительную погрешность в определяемую глубину, имеющую случайную и систематическую составляющие.
Также к неустраняемым погрешностям, носящим систематический характер, относятся погрешности, вносимые рассогласованием приборных (прежде всего, эхолотной) и судовой систем координат. Это - неточное знание взаимного положения датчиков и неточное знание углового ориентирования конструктивных осей антенны эхолота относительно судовой системы координат.
В известных способах для определения поправки эхолота, связанной с пространственной неоднородностью скорости звука в воде, на глубинах до 30 м (согласно нормативным документам по съемке рельефа дна), необходимо производить сложное и трудоемкое действие - тарирование эхолота специальным тарирующим устройством. Причем данная операция должна осуществляться не менее двух раз в сутки (в начале и в конце съемки) с целью определения поправки эхолота. На акваториях с глубинами свыше 30 м должно осуществляться измерение на гидрологических станциях температуры, солености и давления воды или скорости распространения звука в воде специальным измерителем для определения поправки за отклонение действительной скорости звука в воде от расчетной и за рефракцию акустического луча эхолота.
При тарировании эхолота необходимо прекращать съемку и переходить на участок акватории съемки с наибольшими глубинами, где при нахождении судна на якоре или в дрейфе осуществлять погружение (подъем) с борта судна контрольной доски (диска) или приемного вибратора тарирующего устройства в рабочую зону излучающего вибратора эхолота на 10 фиксированных горизонтов тарирования. Погрешность определения поправок эхолота данным методом вследствие неучета изгиба троса под воздействием на погружаемый вибратор или тарирующую доску (диск) течения и дрейфа судна и глазомерного определения глубины горизонта тарирования по меткам на тросе может составлять 1-4% [Н.Д.Коломийчук. Гидрография. Л., ГУНиО МО СССР, 1988, с.240-312]. Для определения с требуемой точностью поправок за изменения осадки судна на мелководье (за проседание судна) необходимо выполнить сравнительно большое число пробегов судна-носителя эхолота на разных глубинах, при различных скоростях и при различной осадке судна с целью получения данных для составления таблиц или номограмм.
Кроме того, необходимо определить группу инструментальных поправок к измеренным эхолотом расстояниям до дна, определение которых также характеризуется большой сложностью и трудоемкостью. Тарирование измеренных эхолотом наклонных расстояний выполняют путем сравнения значений глубин, измеренных центральным и боковыми лучами эхолота в идентичных точках в зоне полос обследования пересекающихся галсов [Дадашев А.А. Тарирование многолучевого эхолота на пересекающихся галсах // Записки по гидрографии. - 2000. - №251, с.42-46]. Так как расстояния, измеренные центральным зондирующим лучом, содержат большинство из перечисленных погрешностей, а точное совпадение точек отражения на дне, до которых измерены расстояния центральным и боковыми лучами, практически невозможно, то не обеспечивается достижение требуемого уровня точности съемки рельефа дна.
На глубинах акватории свыше 30 м поправка эхолота вычисляется как сумма частных поправок, получаемых в результате учета отдельных погрешностей: поправки за отклонение действительной скорости звука в воде от расчетной, поправки за рефракцию, поправки за отклонение частоты вращения электродвигателя от номинальной, поправки за место нуля эхолота, поправки за углубление вибраторов, поправки за наклон дна. Оценим вклад некоторых из них в общую погрешность измерения глубины.
Методика определения поправки за отклонение действительной скорости звука в воде от расчетной характеризуется значительной сложностью и трудоемкостью. Это обусловлено тем, что необходимо в точках в начале и в конце съемки и после каждого шторма или в течение всего периода съемки измерять на стандартных горизонтах температуру, соленость и гидростатическое давление воды или непосредственно скорость распространения звука в воде в равномерно распределяемых по площади акватории точках с наибольшими глубинами, что является весьма сложным и трудоемким действием, особенно на больших глубинах. Обработка результатов данных измерений производится по сложному алгоритму. При этом следует отметить, что определенные расчетным методом поправки за отклонение действительной скорости звука в воде от расчетной соответствуют только месту (некоторой незначительной пространственной области), в котором измерялось распределение по вертикали температуры, солености и плотности воды или непосредственно скорости распространения звука в воде.
Известно [Акустика океана. - М.: Наука, 1974.], что поле скорости распространения звука в морях и океанах характеризуется как крупномасштабной, так и мелкомасштабной пространственной неоднородностью и временной изменчивостью в результате наличия ветрового перемешивания, турбулентности, внутренних волн и других процессов. При этом в верхнем слое моря ветровое перемещение создает неоднородности масштабом от долей до единиц метров.
Учет влияния микроструктуры поля скорости звука и ее изменчивости на точность измерения эхолотом глубины и определения ее координат до настоящего времени остается нерешенной проблемой. Следовательно, определение поправки Δzv с требуемой точностью по всей акватории в течение всего периода съемки используемой в настоящее время расчетной методикой по результатам измерений вертикального распределения температуры, солености, давления или скорости звука в воде в разнесенных в пространстве и по времени точках акватории не представляется возможным, особенно на акваториях с наличием мелкомасштабной пространственной и временной изменчивости гидрофизических параметров.
СКП поправки за рефракцию вследствие того, что ее вычисление основано на данных достаточно редких гидрологических станций, которые вследствие значительной пространственной и временной изменчивости зачастую не соответствуют фактическим гидрологическим условиям на удаленном от станции участке съемки, будет иметь существенную величину. Так, при ошибке в вертикальном профиле скорости звука в 1 м/с для направления приема под углом 60° значение этой СКП может составлять 0.13%. Погрешность измерения глубины вследствие наличия неопределенности направления прихода эхосигнала, обусловленной погрешностью определения скорости звука на поверхности антенны эхолота, равной 1 м/с, достигает 0.2%. Суммарный вклад погрешностей учета рефракции и неопределенности направления приема отраженного сигнала оценивается величиной 0.3-0.5%. [D.F.Dinn, B.D.Loncarevic. The effect of sound velocity errors on multibeam sonar depth accuracy // Proceedings of American Hydrographic symposium. - 1995, p.1001-1009].
У эхолотов с широкой диаграммой направленности СКП, обусловленная наличием уклона дна, может достигать 0,6%.
Для определения поправки за высоту уровня необходимо во время съемки рельефа дна выполнять наблюдения за колебанием уровня на постоянном или на дополнительном уровневых постах. СКП поправки за уровень включает СКП определения нуля глубин на постоянных и дополнительных уровневых постах, СКП передачи нуля глубин с постоянных или дополнительных постов на временные, СКП вычисления мгновенного уровня в точке измерения. Суммарная величина погрешности учета высоты уровня может достигать 0.6 м.
Для многолучевых систем при съемке в крупном масштабе важное значение приобретает вопрос взаимного ориентирования приборных систем координат датчиков качки, эхолота и судовой системы координат.
Погрешность определения координат положения датчиков в судовой системе координат имеет систематический характер. При этом данная погрешность будет иметь постоянный знак и величину.
Вследствие приближенного характера современного способа определения центра тяжести судна и положения осей судовой системы координат (СК) ожидать существенного уменьшения этой погрешности за счет увеличения точности измерения координат в системе, которая сама приближенно определена в корпусе судна, не приходится. Еще более сложный характер носит погрешность, вносимая рассогласованием судовой и приборной СК. Вследствие поворота приборной СК относительно судовой СК появится составляющая вектора-расстояния по оси абсцисс последней. За счет возникающей погрешности в угле θ возникнут погрешности в самой измеряемой глубине. Эта погрешность будет иметь постоянный знак, но будет изменяться с изменением θ. Рассогласование эхолотной и судовой систем координат в 0.5° приведет к систематическим погрешностям в определении глубины и ее положения, достигающим соответственно 1% измеренного расстояния и 2% глубины.
Известные способы съемки рельефа дна акватории МЛЭ имеют существенные методические погрешности из-за невозможности учета пространственно-временной изменчивости скорости распространения звука в воде, из-за погрешностей учета высоты мгновенного уровня, из-за невозможности точного учета рассогласования приборных и судовой систем координат, вследствие чего практически не обеспечивает требуемый уровень точности съемки рельефа дна.
Считается, что в обследовании дна особо важных для мореплавания акваторий в ближайшем будущем будут доминировать МЛЭ. Однако вследствие более существенного возрастания влияния рефракции для крайних боковых лучей возрастает и погрешность измеряемых глубин. Следовательно, съемка при использовании МЛЭ с большой шириной захвата может не соответствовать по точности требованиям стандарта МГО. Еще одним существенным недостатком МЛЭ является то, что вследствие расширения освещаемого боковыми лучами пятна на дне за счет увеличения площади осреднения глубины возрастает погрешность измерения глубины. Следовательно, направление разработки в направлении увеличения ширины полосы захвата МЛЭ будет оставаться неэффективным до тех пор, пока не будет решена проблема увеличения разрешающей способности для крайних боковых лучей.
При картировании рельефа дна СКП построения рельефа дна не должна превышать 0,5 мм в масштабе планшета, что в сочетании с погрешностью определения глубины известным способом и устройством для его осуществления в большинстве случаев не позволяет обеспечить и это требование.
Кроме того, при производстве съемки рельефа дна с последующим картированием рельефа дна, особенно в прибрежной зоне моря и в узкостях, необходимо иметь картографическую информацию как по суше, так и по прилегающей к ней акватории. Использование для этих целей типографских топографических и навигационных карт достаточно затруднительно. Одной из причин этого являются разные картографические проекции. Топографические карты строятся в проекции Гаусса-Крюгера, а навигационные в проекции Меркатора. Эта же причина является основным препятствием для использования растровых образов типографских карт в электронных геоинформационных системах, каковыми являются средства отображения картированной информации при выполнении съемки рельефа дна.
Задачей настоящего технического решения является повышение точности съемки рельефа дна.
Поставленная задача решается за счет того, что в способе съемки рельефа дна акватории эхолотом, установленным на судне, включающим движение судна по заранее установленным галсам, излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин путем учета погрешностей, картирование полученной информации с определением геодезических координат измеренных глубин, определение высоты мгновенного уровня моря, в котором заранее установленные галсы располагают между предварительно выбранными опорными глубинами на поверхности дна акватории съемки, в координатных точках опорных глубин на дне акватории устанавливают пассивные или активные акустические отражатели, определяют глубины относительно нуля глубин над каждым из акустических отражателей и их геодезические координаты, измеряют крайними боковыми лучами эхолота наклонные расстояния до двух опорных глубин, выполняют измерения по замкнутому маршруту (галсу), заканчивая галс измерениями наклонных расстояний до тех же опорных глубин, что и в начале галса, либо до двух других опорных глубин, расположенных на поверхности дна на заданном расстоянии, при определении истинных значений глубин выполняют вычисления невязок, распределяемых в измеренные векторы положения точек дна, в конце каждого галса, при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт, измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между акустическими отражателями и гидроакустическими приемоответчиками, которые размещают на линии горизонта работы приемопередающей антенны эхолота, при этом формируют из приемников две навигационные базы с общим центром базы, располагая их в плоскости, параллельной плоскости линии горизонта работы приемопередающей антенны эхолота, при этом ось одной базы Х направлена вдоль осевой линии эхолота, а ось другой базы Y направлена по траверзу вправо, высоту мгновенного уровня моря определяют непосредственно на горизонте приемоизлучающей антенны, учет погрешностей при определении истинных значений глубин выполняют путем приборного измерения скорости звука на горизонте приемоизлучающей антенны, а в устройство для осуществления способа, содержащее приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок определения средней скорости распространения звука в воде, блок управления и блок сбора, обработки информации и картирование рельефа дна акватории, в котором выход приемопередающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизмерительного блока подключены к входу блока сбора обработки информации и картирования рельефа дна акватории, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна, в которое дополнительно введен блок гидроакустических приемоответчиков, вход которого через блок управления соединен с выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна акватории, и устройство измерения уровня водной поверхности, которое своим выходом соединено с входом блока сбора и обработки информации.
Сущность изобретения поясняется чертежами (фиг.1-13).
Фиг.1. Структурная блок-схема устройства. Устройство состоит из приемоизлучающей антенны 1, передающего блока 2, приемоизмерительного блока 3, блока управления 4, блока определения средней скорости распространения звука в воде 5, блока сбора, обработки информации и картирования рельефа дна 6, блока гидроакустических приемоответчиков 7, устройства измерения уровня 8 водной поверхности, приемника радионавигационной или/и спутниковой навигационной системы 9.
Выход приемопередающей антенны 1 подключен к входу приемоизмерительного блока 3, выход передающего блока 2 соединен с приемоизлучающей антенной 1, выходы приемоизмерительного блока 3 подключены к входу блока сбора обработки информации и картирования рельефа дна акватории 6, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления 4 соединен с передающим блоком 2, приемоизмерительным блоком 3 и блоком сбора информации, обработки и картирования рельефа дна 6, в который дополнительно введен блок определения средней скорости распространения звука в воде 5 в направлении излучения гидроакустического сигнала, выход которого через блок управления 4 соединен с входом приемоизмерительного блока 3, блок управления входом-выходом соединен с выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна 6 акватории, блок гидроакустических приемоответчиков 7 своим входом через блок управления 4 соединен с выходом приемника радионавигационной или/и спутниковой навигационной системы 9, устройство измерения уровня 8 водной поверхности своим выходом соединено с входом блока сбора и обработки информации и картирования рельефа дна 6 акватории.
Приемоизлучающая антенна 1 собрана из пьезокерамических акустических преобразователей, размещенных в одном корпусе, которые используются как для излучения, так и приема отраженных от дна сигналов. В цикле излучения эти преобразователи соединены параллельно, а во время приема эхо-сигналов они работают независимо друг от друга.
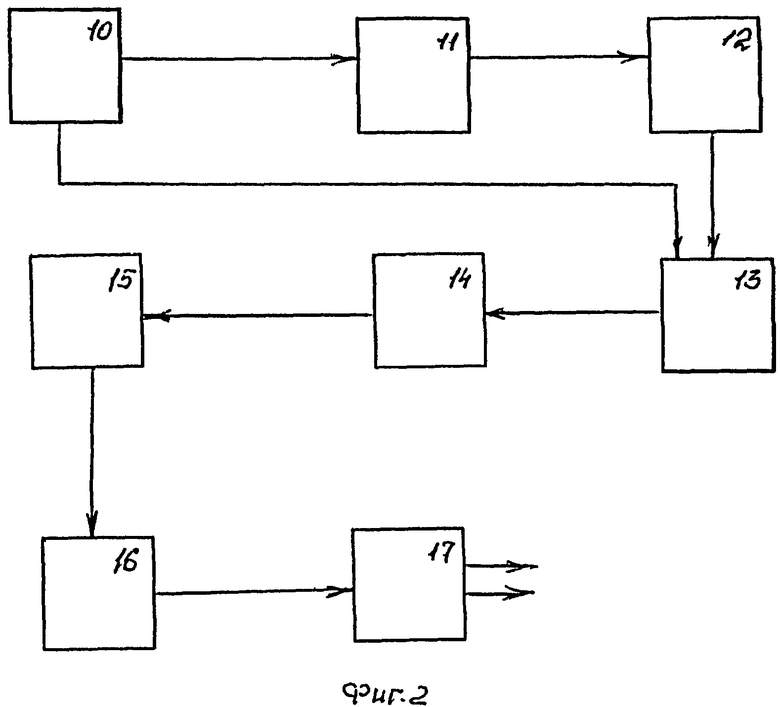
Фиг.2. Передающий блок. Передающий блок 2 состоит из кварцевого генератора 10, стабилизированного по частоте, формирователя 11 периода следования излучаемых импульсов, устройства 12 формирования длительности излучаемого импульса, синхронизатора 13, устройства квантования 14, усилителя мощности 15, преобразователя 16, коммутатора 17.
Генератор 10 вырабатывает непрерывные колебания частотой 4,8 Мгц, которая посредством синхронизатора 13 снижается до 600 кГц, и формируется импульс излучения. Усилитель мощности 15 усиливает импульс до величины, необходимой для возбуждения электроакустических преобразователей антенны 1. Посредством коммутатора 17 преобразователи антенны 1 во время излучения подключаются к передающему блоку 2, а во время приема к приемоизмерительному блоку 3.
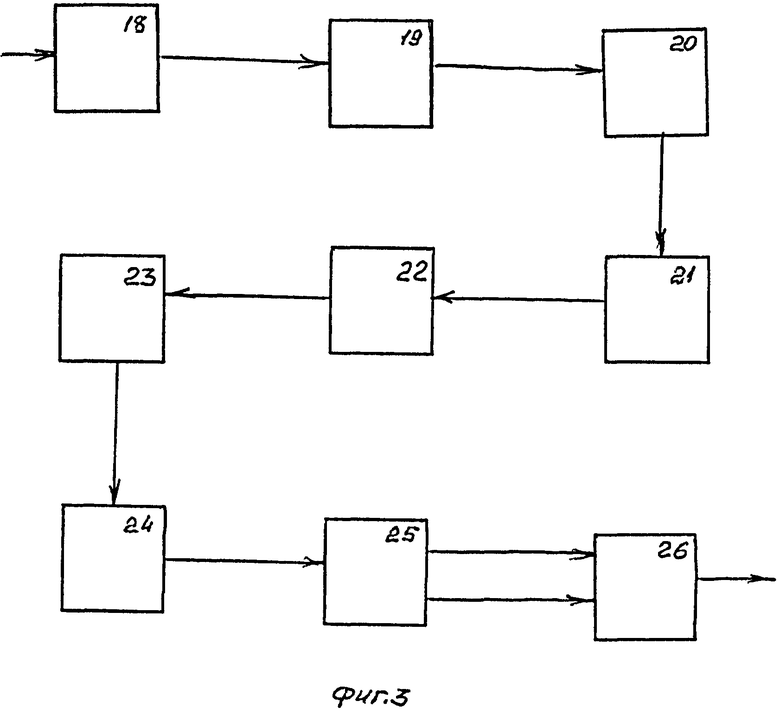
Фиг.3. Приемоизмерительный блок. Приемоизмерительный блок 3 состоит из блока полосовых усилителей 18, антенного усилителя 19, основного усилителя 20, блока формирователей кодов управления 21, блока фильтров 22, амплитудного детектора 23, фильтра 24 нижних частот, коммутатора 25, выходного усилителя 26 и предназначен для приема, усиления и частотной селекции принятых сигналов.
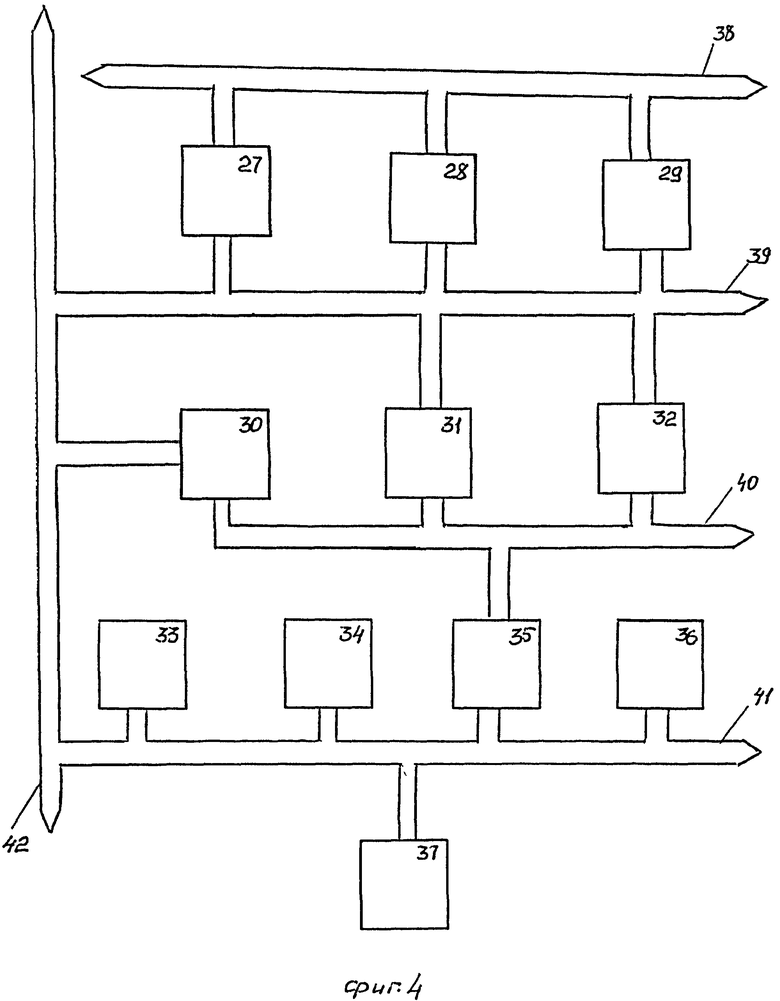
Фиг.4. Блок управления. Блок управления 4 состоит из ПЗУ микрокоманд 27, ПЗУ управления выбором адреса 28, БИС микропрограммного управления 29, двух микропроцессоров 30, 31, ПЗУ 32, ОЗУ 33, схемы формирования переносов 34, трех буферных регистров 35, 36, 37 и пяти магистралей: магистрали адреса 38, магистрали микрокоманд 39, магистрали D 40, магистрали М 41, магистрали L 42 и предназначен для выработки и трансляции команд и информационных файлов с принимаемой от внешних источников информации, а также информации, находящейся в ПЗУ.
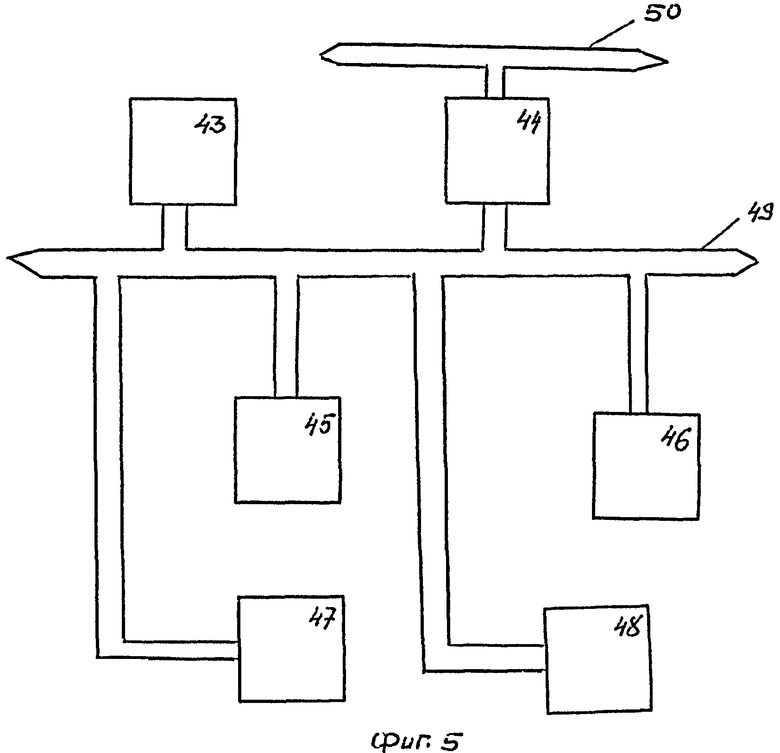
Фиг.5. Блок определения средней скорости распространения звука в воде. Блок определения средней скорости распространения звука в воде 5 состоит из дешифратора микрокоманд 43, буферных каскадов 44, регистра адреса 45, арифметико-логического устройства 46, мультиплексоров 47, дешифратора 48, магистрали А 49, магистрали D 50, аккумулятора 51.
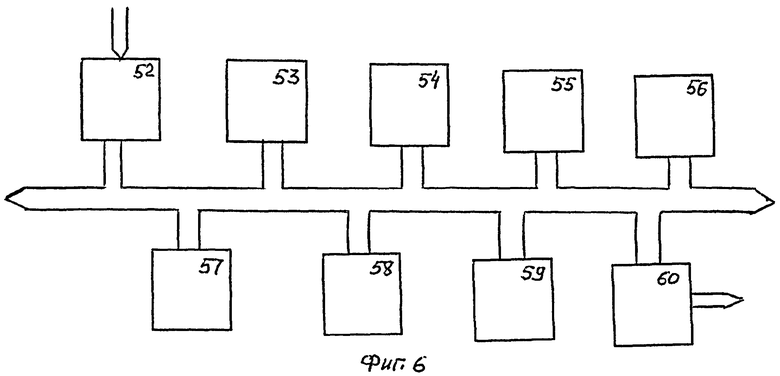
Фиг.6. Блок сбора, обработки информации и картирования рельефа дна. Блок сбора, обработки информации и картирования рельефа дна 6 состоит из приемных регистров 52, блока системной магистрали 53, усилителя 54, диспетчера памяти 55, операционного блока 56, блока управления потоком команд 57, блока микропрограммного управления 58, блока прерываний 59, выходных регистров 60.
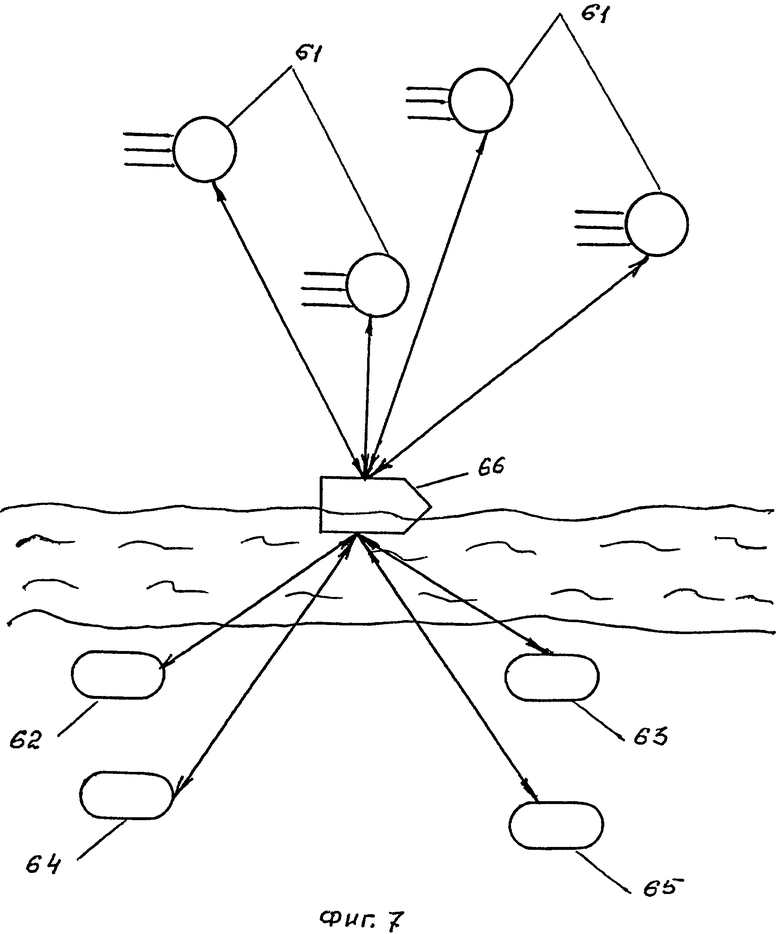
Фиг.7. Схема формирования навигационной базы, где показаны навигационные спутники 61, акустические отражатели 62, 63, 64, 65, судно 66.
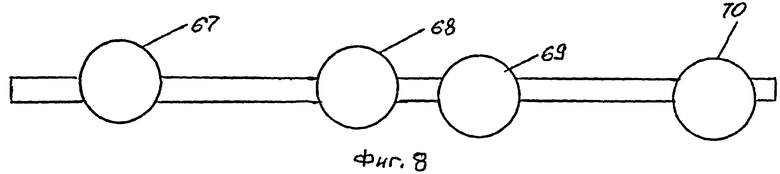
Фиг.8. Взаимное расположение приемников секции антенны, где позициями 67, 68, 69, 70 обозначены секции антенны.
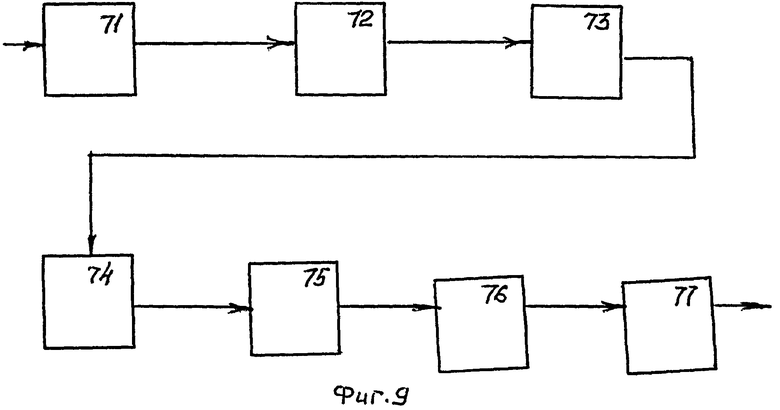
Фиг.9. Функциональная схема приема сигнала "включение", которая включает формирователь характеристики направленности (ФХН) 71, широкополосный фильтр 72 с коррекцией амплитудно-частотной характеристики, ограничитель 73, узкополосный фильтр 74, детектор 75, интегратор 76, пороговую схему 77.
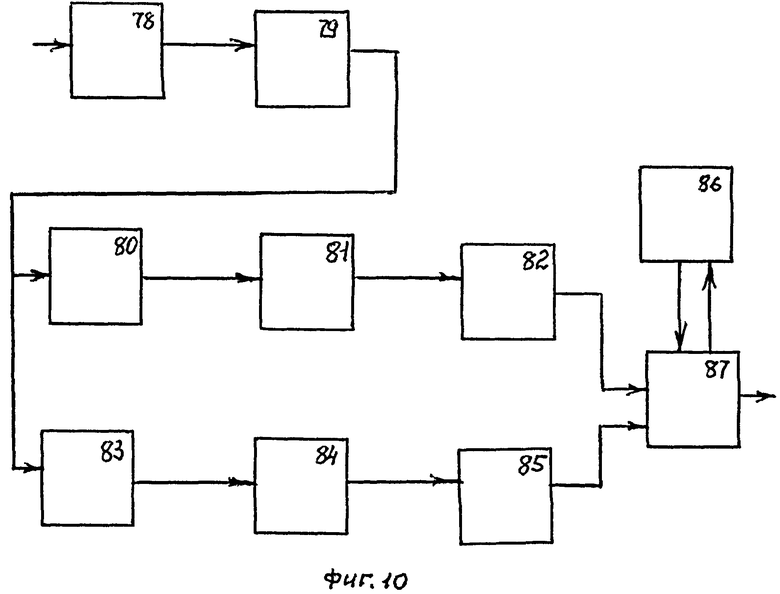
Фиг.10. Функциональная схема обработки сигналов, которая включает широкополосный фильтр 78 с коррекцией амплитудно-частотной характеристики, ограничитель 79, узкополосный фильтр 80, детектор 81, интегратор 82, узкополосный фильтр 83, детектор 84, интегратор 85, пороговую схему 86, схему выбора максимума 87.
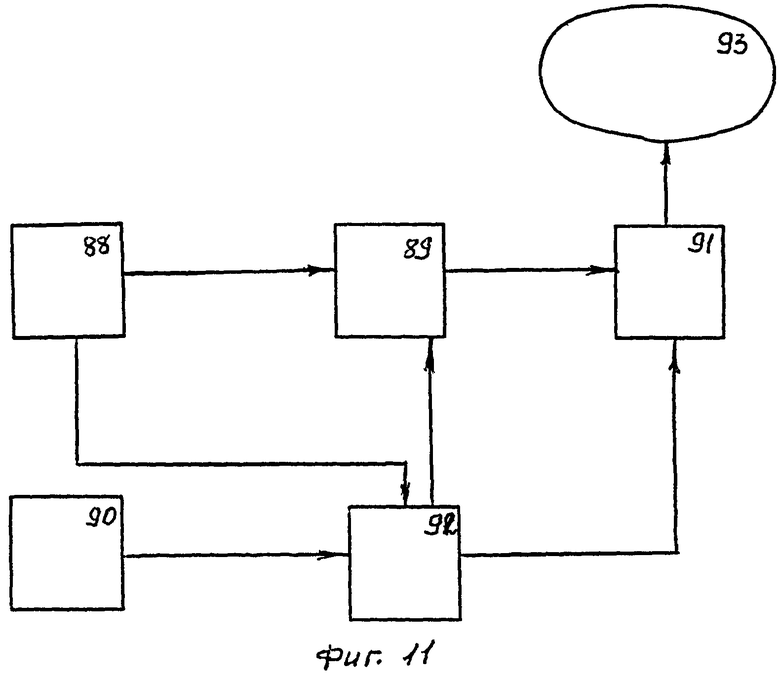
Фиг.11. Спутниковый связной модуль, который включает кодер 88, устройство формирования 89 пакетов сообщений на передачу, устройство формирования 90 алгоритма передачи пакетов сообщений, согласующее устройство 91, устройство управления 92 с программой работы передатчика на излучение (3-8 раз/сутки), передающую антенну 93 ненаправленного типа.
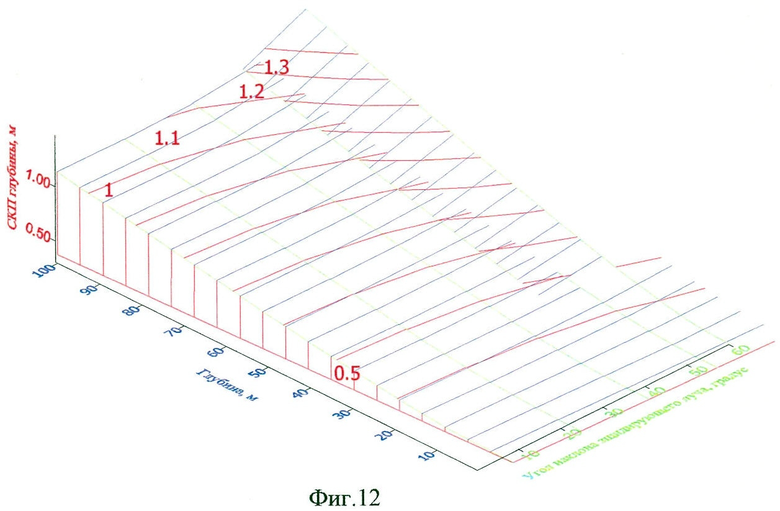
Фиг.12. СКП съемки рельефа дна многолучевым эхолотом на диапазоне глубин 0-100 м известными способами определения глубины.
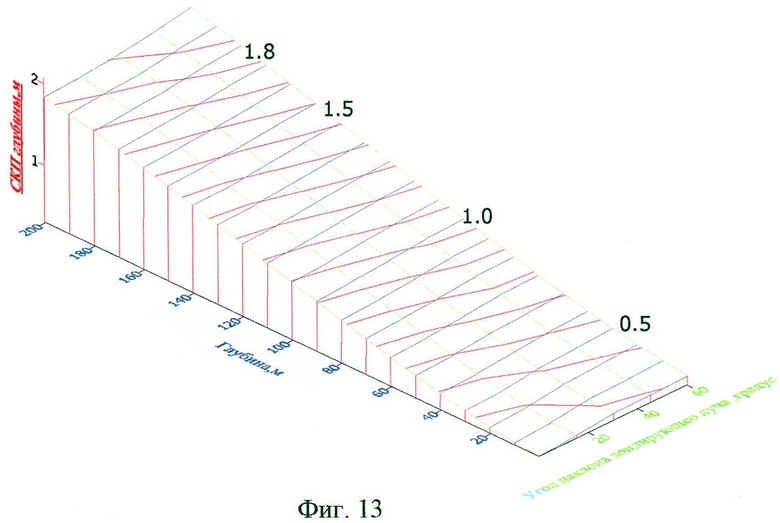
Фиг.13. СКП съемки рельефа дна многолучевым эхолотом на диапазоне глубин 0-100 м известными способами определения глубины.
Устройство измерения уровня моря 8 представляет собой устройство автоматической регистрации уровня моря типа ADI-3795A (www.infomarcompany.com).
В отечественной практике для приведения батиметрических измерений к нулю глубин используется две уровневые поверхности: для морей без приливов - средний многолетний уровень моря; для приливных морей - наиболее низкий теоретический уровень. Таким образом, единство измерений глубин не обеспечивается. Неудобство использования наиболее низшего теоретического уровня в качестве нуля глубин для приливных морей заключается в том, что его высота изменяется от места к месту и имеет наклон. Для отсчета высот точек на суше в России используется Балтийская система высот, когда высоты отсчитываются как отрезки нормалей к эллипсоиду, отложенные от поверхности квазигеоида до точек физической поверхности. На морях и океанах квазигеоид совпадает с геоидом. Для обеспечения единства измерений глубин целесообразно ввести единую уровенную поверхность для всех морей. В качестве такой поверхности целесообразно использовать геоид, поверхность которого эквипотенциальна и инвариантна во времени. Для перевода в новую систему уже полученные глубины должны быть перевычислены. При проведении новых съемок для определения положения мгновенной уровенной поверхности должна использоваться спутниковая навигационная система (ГЛОНАСС или GPS в дифференциальном режиме). Геоид определяется уравнением:

где W - общий гравитационный потенциал;
W0 - константа, соответствующая принятой модели геоида.
Модель такой поверхности в настоящее время вычислена NIMA и NASA по данным морских гравиметрических съемок и спутниковых радиовысотомерных измерений с погрешностью ±25 см для любой точки в Мировом океане.
При промере в прибрежной зоне глубина относительно геоида вычисляется по формуле:

где z - измеренная глубина от мгновенного уровня;
Нр - высота поверхности над геоидом.
Величина Нр, в свою очередь, определяется по формуле:

где hэ - измеренная высота судна над эллипсоидом;
Np - высота геоида над эллипсоидом в данной точке.
В то время как измеренные величины z и hэ будут измеряться во времени, вычисленная глубина zr будет оставаться постоянной во времени. В дальнейшем, когда hэ и Np будут определяться во Всемирной геодезической системе координат WGS-84 с помощью космических навигационных систем, вычисленная глубина zr будет также определена в этой системе. Такая уровневая поверхность будет обеспечивать единую высотную основу гидрографических измерений во всех морях Российской Федерации.
Блок гидроакустических приемоответчиков 7 представляет собой гидроакустическую навигационную систему, в которой применена комбинированная система гидроакустической навигации с длинной и ультракороткой базой, которая позволяет использовать пеленгационную систему решения задачи выхода судна в точку установки акустического отражателя. При этом гидроакустическая антенна активных акустических отражателей, как и судна, представляет собой две имеющие общий центр базы из приемников. При этом если две приемные базы расположены в плоскости, параллельной плоскости палубы, и ортогональны, ось одной базы направлена вдоль осевой линии акустического отражателя, а ось другой базы направлена по траверзу вправо.
Две имеющие общий центр базы из приемников позволяют определить направление на источник сигнала как линию пересечения двух конических поверхностей с совпадающими вершинами. Сдвиг фаз Δφ1 электрических сигналов двух точечных приемников (первого, второго), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода сигнала соотношением
Δφ1=kcosα, где α - угол прихода сигнала, k - коэффициент, равный k=2πf0b/c, где b - длина базовой линии, f0 - несущая частота, с - скорость звука в точке приема сигнала. Таким образом α=arccos(Δφ1/k). Сдвиг фаз Δφ2 электрических сигналов двух точечных приемников (третьего и четвертого), поступающих на входы приемного тракта, связан с углом между базовой линией и направлением прихода соотношением Δφ2=kcosβ, β=arccosΔφ2/k. Введя вспомогательные углы φ и ψ (фиг.2), получим, что при известной глубине Н подводного объекта выражения для координат подводного объекта Х0, Y0 относительно центра базы. При этом плоскость с ординатой Н является третьей поверхностью положения. Очевидно, что
cosψ=R/D, где D - дистанция, R - наклонная дальность, cosψ=x/D,
cosα=x/R(cosΨcosφ)=(Dx)/(RD)=x/R, cosβ=y/R(cosΨcosφ)=(Dy)/(RD)=yR
При этом cosα=cosΨcosφ, cosβ==cosΨsinφ, X0=Hcosφ/tgΨ,
Y0=Hsinφ/tgΨ. Откуда получаем x0=сНΔφ1/а; y0=сНΔφ2/b.
Так как плоскость палубы практически никогда не совпадает с плоскостью горизонта, то учитываются также влияние углов крена  и дифферента γ. Дифферент не сказывается на значении y0, а крен на значении x0, ось Х направлена вдоль продольной оси подводного объекта, а ось Y направлена по траверзу. Исправленные путем учета крена и дифферента значения координат можно записать следующим образом: x1=Htg[arctg([0/H)+γ],
и дифферента γ. Дифферент не сказывается на значении y0, а крен на значении x0, ось Х направлена вдоль продольной оси подводного объекта, а ось Y направлена по траверзу. Исправленные путем учета крена и дифферента значения координат можно записать следующим образом: x1=Htg[arctg([0/H)+γ],  , где γ и - положительные значения при опускания носа и правого борта.
, где γ и - положительные значения при опускания носа и правого борта.
Информация о координатах судна относительно подводного акустического отражателя позволяет решить задачу выхода судна в реперную точку, так как она легко преобразуется в значения курсового угла КУ и дистанции D: КУ=arctg(y,x), D=(x2+y2)1/2. Решение обратной задачи дает возможность определить координаты судна на карте или планшете, на который предварительно наносится реперная точка. В том случае, когда определяется также наклонное расстояние до активного акустического отражателя, третьей поверхностью положения является сфера с радиусом, равным наклонному расстоянию. Формулы для вычисления координат упрощаются и имеют вид х0=(cRΔφ12)/α, y0=(cRΔφ32)/β.
Каждая приемная гидроакустическая антенна состоит из четырех гидрофонов. Секция антенны состоит из двух одноканальных и одного двухканального модуля, располагающихся на линейном несущем кронштейне. Расстояние между приемными гидрофонами двухканального модуля составляет 50 мм. Максимальное разнесение крайних приемников на кронштейне составляет 1000 мм. Кронштейн перфорирован, что позволяет располагать приемники в непосредственной близости друг от друга для проведения фазовой калибровки и с произвольным разнесением для проведения измерений направления прихода акустического сигнала. В качестве приемников-гидрофонов использованы пьезокерамические сферы диаметром 30 мм, внутри которых размещены предварительные усилители с коэффициентом усиления 30 дБ. Сферы размещаются на стальной пластине размером 145×145×10 мм, снабженной элементами крепления и акустической заглушкой с тыльной стороны. Коэффициент подавления звукового сигнала с тыльной стороны составляет не менее 30 дБ.
Антенный комплекс состоит из 8-канальной 2-секционной приемной гидроакустической антенны и гидроакустической излучающей антенны.
Каждая секция приемной антенны представляет собой 4-элементный неэквидистантный гидрофонный модуль, предназначенный для измерения проекции вектора прихода акустического сигнала на одну из горизонтальных осей в режиме ультракороткой базы, в пеленгационном режиме, либо для приема сигналов в режиме длинной базы на 4 рабочих частотах. Секции приемной антенны расположены в горизонтальной плоскости перпендикулярно друг к другу.
Таким образом, когда все гидрофоны производят прием на одной и той же рабочей частоте, реализуется режим определения задержки и направления прихода отклика от фиксированного активного акустического отражателя в режиме ультракороткой базы, а когда каждый из гидрофонов настроен на свою рабочую частоту, осуществляется режим измерения задержек от нескольких акустических отражателей в режиме длинной базы. Система передачи информации по гидроакустическому каналу реализуется с использованием штатных средств гидроакустической связи. При этом в качестве устройств формирования и обработки сигналов могут быть применены как имеющаяся в составе гидроакустическая аппаратура, обеспечивающая режим гидроакустической связи, так и дополнительные устройства в виде приставок, подключаемых к их передающему и приемному трактам.
Работа устройства заключается в следующем. По командным импульсам, вырабатываемым блоком управления 4 в передающем блоке 2, осуществляется формирование акустического импульса и излучение его приемоизлучающей антенной 1 в сторону дна, а также прием и преобразование в электрический сигнал отраженных дном акустических сигналов, трансляция этих сигналов на вход приемоизмерительного блока 3, в котором вырабатываются электрические сигналы, пропорциональные временным задержкам прихода отраженных от поверхности дна сигналов, по которым определяются расстояния от приемоизлучающей антенны 1 до точек отражения сигналов от морского дна.
Одновременно по командным импульсам с блока управления 4 запускаются блок определения средней скорости распространения звука в воде 5, блок гидроакустических приемоответчиков 7, устройство измерения уровня моря 8.
Далее по командным импульсам с блока управления 4 информация с блоков 3, 4 и 5 поступает на блок сбора, обработки информации и картирования рельефа дна 6, на который также поступает информация от судовых измерителей составляющих качки, курса, скорости, технических средств определения координат места.
В блоке 6 определяется поправка ΔZv к глубинам, измеренным эхолотом (H=ΣCiti/2, где Ci - скорость распространения звука в воде, ti - промежуток времени между излучением сигнала, приемом эхо-сигнала от дна), за отклонение действительной скорости звука в воде от расчетной для конкретного эхолота: ΔZv=Ci(Ccp/Со-1), где Ci - глубина, измеренная эхолотом, Со - скорость распространения звука в воде, на которую рассчитан эхолот, измеренная посредством блока определения средней скорости звука в воде 5.
Картирование информации осуществляется нанесением геодезических координат точек отражения гидроакустических сигналов от морского дна на планшет, который строится путем сопряжения топографических и навигационных растровых карт в следующей последовательности:
- растр навигационной карты в проекции Меркатора подвергается векторизации береговой линии навигационной карты;
- выполняется выборка участка, соответствующего морской акватории, на которой производится съемка рельефа дна с учетом векторизации береговой линии навигационной карты;
- производится запись в итоговый растр навигационной карты;
- растр топографической карты в проекции Гаусса-Крюгера приводится к масштабу навигационной карты;
- выполняется преобразование координат проекции Гаусса-Крюгера в географические координаты;
- выполняется преобразование географических координат в координаты проекции Меркатора;
производится выборка участка растра, соответствующего сухопутной (береговой) области;
- выполняется запись в итоговый растр топографической карты;
- по результатам записей в итоговые растры навигационной и топографической карты строится итоговая растровая карта совмещенной навигационной и топографической информации в Меркаторской проекции;
- на итоговой растровой карте, выводимой на устройство индикации, также отображается путь судна.
Суть предлагаемого способа заключается в использовании опорных глубин и координат (глубин и координат на акватории съемки) и вычислении приращений глубин и координат как разности двух смежных измеренных МЛЭ векторов расстояний. Таким образом, каждая глубина и ее геодезические координаты вычисляются как сумма приращений смежных глубин и их геодезических координат, начиная с глубины и геодезических координат точки опорной глубины.
Суммирование приращений глубин, измеренных через малый промежуток времени, в пределах которого гидрологические условия можно принять неизменными, позволяет исключить влияние погрешностей, носящих систематический характер. К ним, например, относятся погрешности, вызванные изменчивостью поля скорости звука, отклонением мгновенного уровня от наблюдаемого на уровненном посту, изменением ориентации приборной системы координат и т.п. Использование опорных глубин позволяет также смягчить требования по использованию морских уровненных постов.
Предлагаемый способ съемки рельефа дна с использованием опорных глубин включает:
- установку пассивных или активных акустических отражателей;
- определение глубины (относительно нуля глубин) над каждым из отражателей и их геодезических координат посредством блока гидроакустических приемоответчиков;
- измерения крайними боковыми лучами наклонных расстояний до двух акустических отражателей, расположенных на поверхности дна на заданном расстоянии;
- производство измерений по замкнутому маршруту (галсу), заканчивая его измерениями наклонных расстояний до тех же акустических отражателей, что и в начале галса, либо до двух других акустических отражателей, расположенных на поверхности дна на заданном расстоянии;
- производство непрерывных излучения и приема отраженных от дна гидроакустических сигналов в зоне зондирования, а также измерение расстояний от антенны эхолота до мест отражения дном указанных сигналов;
- измерение средней скорости звука в воде на горизонте приемоизлучающей антенны посредством блока определения средней скорости звука в воде 5;
- измерение колебаний уровня моря посредством устройства измерения уровня моря 8;
- определение геодезических координат центра радиоприема антенны судового приемоиндикатора РНС определения координат;
- измерение параметров бортовой, килевой и вертикальной качек, курса, скорости и координат судна;
- определение истинного курса и скорости движения центра тяжести судна судовым навигационным комплексом;
- фиксацию времени в моменты приема антенной эхолота отраженных от дна гидроакустических сигналов и в моменты обсервации судна;
- вычисление невязок, распределяемых в измеренные векторы положения точек дна, в конце галса (съемки);
- вычисление и регистрация по полученным данным искомых глубин и геодезических координат их места.
Вычисления, исходя из сущности способа, выполняют по формулам:
где:
-  - искомый вектор положения точки дна в геодезической системе координат, когда он вычисляется через приращение к вектору положения точки, зондируемой в данной посылке предыдущим боковым лучом, начиная с центрального луча и далее - от центрального луча к предпоследнему боковому лучу по левому или по правому борту;
- искомый вектор положения точки дна в геодезической системе координат, когда он вычисляется через приращение к вектору положения точки, зондируемой в данной посылке предыдущим боковым лучом, начиная с центрального луча и далее - от центрального луча к предпоследнему боковому лучу по левому или по правому борту;
-  - искомый вектор положения точки дна, когда он вычисляется через приращение к вектору положения точки дна, зондируемой тем же лучом МЛЭ при предыдущей посылке;
- искомый вектор положения точки дна, когда он вычисляется через приращение к вектору положения точки дна, зондируемой тем же лучом МЛЭ при предыдущей посылке;
-  - среднее значение векторов положения точки отражения, вычисленных двумя способами;
- среднее значение векторов положения точки отражения, вычисленных двумя способами;
-  ,
,  - векторы положения опорных точек на дне;
- векторы положения опорных точек на дне;
-  - приращение вектора положения текущей точки к его значению для предыдущей точки зондирования в данной посылке;
- приращение вектора положения текущей точки к его значению для предыдущей точки зондирования в данной посылке;
-  - приращение вектора положения текущей точки к его значению для предыдущей точки зондирования в предыдущей посылке;
- приращение вектора положения текущей точки к его значению для предыдущей точки зондирования в предыдущей посылке;
-  - текущий номер бокового луча зондирования;
- текущий номер бокового луча зондирования;
- l0, p0 - количество боковых лучей по левому или по правому борту, исключая центральный;
-  , l0 - вектор положения зондируемой крайним лучом точки дна, вычисленный по приращению к вектору положения точки, зондируемой предшествующим лучом в данной посылке;
, l0 - вектор положения зондируемой крайним лучом точки дна, вычисленный по приращению к вектору положения точки, зондируемой предшествующим лучом в данной посылке;
-  - текущий номер приращения к вектору положения точки дна, вычисляемого между смежными боковыми лучами, начиная с центрального;
- текущий номер приращения к вектору положения точки дна, вычисляемого между смежными боковыми лучами, начиная с центрального;
-  - вектор положения j-той точки отражения, зондируемой боковым лучом, вычисленный для первой посылки в начале съемки;
- вектор положения j-той точки отражения, зондируемой боковым лучом, вычисленный для первой посылки в начале съемки;
-  - приращение вектора положения эхолота между моментами приема отраженных сигналов текущей и предыдущей посылок зондирующего импульса;
- приращение вектора положения эхолота между моментами приема отраженных сигналов текущей и предыдущей посылок зондирующего импульса;
- i - номер текущей посылки;
- n - количество посылок зондирующих импульсов при съемке за весь период между моментами пересечения базы акустических преобразователей.
После замыкания галса на базу акустических преобразователей в конце галса (съемки) вычисляются невязки:


Данные невязки распределяются в измеренные векторы положения точек дна соответственно номеру бокового луча или количеству приращений, использованных для вычисления вектора положения точек, измеренных центральным лучом.
Формула для вычисления значений уравненных векторов положения точек дна имеет вид:

Для составляющих векторов  получим:
получим:



где:
-  ,
,  ,
,  - координаты и глубина опорных m=1, 2, 3, 4 глубин;
- координаты и глубина опорных m=1, 2, 3, 4 глубин;
- ΔXi,j, ΔYi,j, Δzi,j (i=1, k, n; j=0, 1, p, j) - приращения координат и глубины;
- ΔXak, ΔYak, ΔZak - приращения координат положения антенны МЛЭ за промежуток времени между смежными посылками зондирующих импульсов антенной МЛЭ.
Чтобы получить формулы для оценки точности определения координат и глубины точек дна при съемке предлагаемым способом, принималось, что наибольшая ошибка будет допущена при i→n-1; j=l0. Переписывая уравнения (8), (9), (10) для значений j=n-1; j=l0, а также приравнивая  ;
;  ;
;  ;
;  ;
;  ;
;  и переходя к выражениям погрешностей как дифференциалам функций многих переменных, получим следующие выражения погрешностей определения координат и глубины при съемке предлагаемым методом:
и переходя к выражениям погрешностей как дифференциалам функций многих переменных, получим следующие выражения погрешностей определения координат и глубины при съемке предлагаемым методом:



где:
- δx0, δy0, δz0 - погрешности координат и глубины опорной точки;
- δxak, δyak, δzak - погрешности определения приращений координат положения антенны МЛЭ и глубины за промежуток времени между посылками зондирующих импульсов;
- δΔxi,l, δΔyi,l, δΔzi,l - погрешности приращения координат точек дна и глубины, определенных по измеренным расстояниям смежными зондирующими лучами в одной посылке;
- δΔxk,j, δΔyk,j, δΔyk,j - погрешности определения приращений координат точек дна и глубины, определенных по измеренным расстояниям одноименными зондирующими лучами при двух последовательных посылах зондирующих лучей.
Анализ формул (11), (12), (13) выполнен исходя из гипотезы, что слагаемые под знаком сумм в правых частях не отягощены постоянными систематическими составляющими погрешностей, поскольку в приращениях данные погрешности практически отсутствуют, а включают лишь случайные погрешности, которые малы по величине и имеют разные знаки. Следовательно, при большом количестве измерений все указанные суммы будут стремиться к нулю.
Таким образом, погрешности определения глубин и их координат предлагаемого способа съемки эталонного батиметрического поля, в основном, будут определяться погрешностями координат и глубины в точке опорных глубин.
Результаты математического моделирования в реальных условиях показали, что предложенный способ обеспечивает повышение точности измерений более чем в два раза по сравнению с известными способами..
Таким образом, предлагаемый способ создания эталонного батиметрического поля обеспечивает получение точностей представления глубин и координат, необходимых для метрологического обеспечения гидрографических измерений.
Оценка точности съемки рельефа дна предложенным способом выполнена на основе модельных расчетов. С этой целью выполнено сравнение точности измерения глубины, полученной с помощью МЛЭ, с моделируемой математически задаваемой поверхностью для принятых параметров движения судна, параметров качки и точности их измерений, инструментальной точности эхолота, с учетом изменчивости скорости звука и изменении высоты уровня в районе съемки.
При моделировании процесса съемки рельефа дна принималось, что эхолот измеряет по фиксированным направлениям наклонное расстояние как длину отрезка прямой, соединяющей антенну эхолота с точкой пересечения зондирующего луча с математически задаваемой поверхностью.
Определение положения антенны эхолота в геодезической системе координат производилось по формуле преобразования координат для случая переноса начала и поворота новой системы координат относительно старой:
где Хга, Yга, ZГa - геодезические координаты антенны эхолота;
А - матрица направляющих косинусов осей геодезической системы координат (СК) в судовой СК;
xаэ, yаэ, zаэ - координаты антенны эхолота в СК;
x0, y0, Z0 - координаты начала геодезической СК в судовой СК. Расчет элементов матрицы А производился по формулам:
где α - истинный курс судна;
P, R - углы килевой и бортовой качек.
Направляющие косинусы ортов направлений, по которым производится измерение эхолотом расстояния, вычислялась по формулам:
где θ - направление приема отраженного акустического сигнала.
Формулы, использовавшиеся для вычисления координат антенны эхолота в геодезической СК, имеют вид:

Положение начала судовой СК на каждый момент посылки определялось величиной перемещения судна с заданной скоростью по задаваемому направлению с учетом моделируемого рыскания судна и вертикальной качки и приращения мгновенного уровня за счет прилива.
Координаты точки дна определялись как точки пересечения каждого зондирующего луча с плоскостью, задаваемой нормальным уравнением

где X, Y, Z - текущие координаты плоскости принятой геодезической СК;
αП, βП, γп - углы, образуемые нормалью к плоскости с осями координат;
р - длина нормали, опущенной на плоскость из начала координат.
В модели плоскость задавалась тремя параметрами αП, βП, p. При этом p принималось за среднюю глубину в районе съемки. Параметр плоскости β вычислялся по формуле

Для определения координат точки пересечения зондирующего луча с плоскостью зондирующий луч представлялся в виде прямой, проходящей через точку расположения антенны эхолота:

где b1, b2, b3 - направляющие косинусы прямой, которые вычислялись по формуле.
где в правой части в скобках приведены направляющие косинусы орта зондирующего луча в приборной СК.
Выражения для вычисления геодезических координат точки дна В имеют вид
где  - направляющие косинусы нормали к плоскости.
- направляющие косинусы нормали к плоскости.
Вычисленная по третьей формуле аппликата ZB принимались за истинную глубину. Координаты XB и YB принимались за истинные координаты измененной глубины Из вычисленных значений XB, YB, ZB формировались массивы истинных значений глубины и ее координат.
Истинные измеренные расстояния до точек дна вычислялись по формуле

Измеренная в приборной СК глубина и ее ордината вычислялись по формулам

Геодезические координаты точки дна  ,
,  ,
,  вычислялись по формулам
вычислялись по формулам
Рассчитанные по формуле (25) величины  ,
, принимались за вычисленные координаты исправленной глубины, а аппликата
принимались за вычисленные координаты исправленной глубины, а аппликата  - за исправленную глубину. Из полученных результатов вычислений этих величин для каждого зондирующего луча и для всех посылок зондирующего луча формировались массивы исправленных глубин, вычисленных абсцисс, ординат и измеренных расстояний
- за исправленную глубину. Из полученных результатов вычислений этих величин для каждого зондирующего луча и для всех посылок зондирующего луча формировались массивы исправленных глубин, вычисленных абсцисс, ординат и измеренных расстояний
Процесс качки судна моделировался гармоническими колебаниями вида:
где Ai, Ti, ψi (i=BK, БК, КК) - задаваемые значения амплитуды, периода и фазы соответствующего индексу процесса: ВК - вертикальной качки, БК - бортовой качки, КК - килевой качки.
При моделировании изменения высоты мгновенного уровня ставилась цель использовать параметры, характеризующие максимально возможную в природе скорость этого процесса, и тем самым протестировать разрабатываемый метод для критических условий. С этой целью проанализированы данные наблюдений уровней в различных окраинных морях России, характеризующихся различными типами приливов. В результате анализа установлена максимальная скорость изменения высоты уровня, которая характерна для неправильных суточных приливов и составляет 141 см в час при амплитуде порядка 560 см Минимальная скорость изменения высоты уровня присуща для такого же типа приливов и характеризуется величиной порядка 2 см в час при амплитуде 12 см. У суточных и полусуточных приливов скорости изменения высоты прилива составляют соответственно 33 и 46,5 см в час при амплитуде 264 и 140 см соответственно. Используя максимальные значения скорости и амплитуды, высота прилива в каждый момент измерения глубин представлялась в модели с помощью выражения

где A0 - задаваемая амплитуда прилива,
 - задаваемая скорость изменения высоты прилива.
- задаваемая скорость изменения высоты прилива.
Так же, как и при моделировании изменения высоты прилива, при моделировании фактического значения скорости звука по трассе и на поверхности антенны эхолота ставилась цель использовать данные о максимальной природной временной и пространственной изменчивости этих параметров и тем самым оценивать степень их воздействия на точность предлагаемого метода съемки. Для этого были использованы суточные максимальные средние квадратичные отклонения температуры и солености воды на стандартных горизонтах для всей субарктической зоны Мирового океана. Максимальная изменчивость принятых значений на каждом горизонте моделировалась как приращение, вызванное суточными дисперсиями температуры и солености на i-том горизонте

где K1, К2 - коэффициенты пропорциональности,
σtmaxi, σsmaxi - максимальные суточные средние квадратические отклонения температуры и солености на i-том горизонте.
Для расчетов принимались следующие значения коэффициентов K1 и К2 в интервале температуры от 0 до 20°С: при повышении температуры воды на 1°С скорость звука увеличивается на 3,4 м/с, т.е K1=3,4 (м/с)/°С, а при повышении солености на 1%о - уменьшается на 0,58 м/с, т.е. К2=0,58 (м/с)/%о.
При расчетах значений σt max i, σs max i брались значения случайного числа от 0 до 1, выдаваемого ЭВМ, знак которого задавался из условия если случайное число n≤0,5, то n=-n, иначе n=n.
Средняя скорость звука по вертикальному профилю рассчитывалась по формуле
где Vi (i=1, 2) - скорость звука на горизонтах, ограничивающих слой осреднения;
ΔZK=Zi+1-Zi - толщина слоя осреднения,
n - количество слоев осреднения,
ΔVi (i=1,2) - величина пространственно-временной изменчивости среднего значения скорости звука на горизонте, вычисляемая по формуле (28).
Данное значение скорости принималось за фактическое, а величина отклонения расчетной средней скорости, рассчитанной для профиля среднеарифметических значений параметра, вычислялась как разность этих величин и принималась за величину погрешности расчетной средней скорости звука при каждой посылке эхолотом зондирующего луча.
Для моделирования пространственной изменчивости скорости звука на горизонте антенны эхолота использовались данные измерения скорости звука на глубине 1 м на ходе судна и амплитуда и пространственная периодичность мелкомасштабных флуктуаций (соответственно 1.5 м/с и 230 м) использованы в модели для определения отклонения фактической скорости звука от расчетной по формуле

где Av - амплитуда мелкомасштабных флуктуаций скорости звука на поверхности антенны;
V - скорость судна при съемке,
T1 - пространственный период мелкомасштабных флуктуаций скорости звука.
Для вычисления абсолютных погрешностей глубин, полученных при съемке по традиционной и предлагаемой технологиям, использовались массивы истинных, исправленных и вычисленных глубин. Абсолютная погрешность вычислялась как разность исправленных и вычисленных глубин с истинной и представлялась как функция истинных координат глубин. Полученные значения абсолютных погрешностей формировались в два массива для характеристики точности съемки по традиционной и предлагаемой технологиям. Кроме того, по вычисленным абсолютным погрешностям глубин рассчитывалась СКП по формулам:


где n - количество посылок зондирующих импульсов на галсе;
l - количество зондирующих лучей
Количественная оценка точности съемки рельефа дна с помощью многолучевого эхолота выполнена на основе априорных оценок основных составляющих погрешностей по формулам [D.F.Dinn, B.D.Loncarevic. The effect of sound velocity errors on multibeam sonar depth accuracy // Proceedings of American Нуdrographic symposium. - 1995, p.1001-1009]. Формула для СКП измерения глубины имеет вид:

а формула для вычисления СКП определения положения измеренной глубины имеет вид
где θ - угол от диаметральной плоскости до направления приема отраженных импульсов,
σr - СКП измерения расстояния;
y - расстояние по горизонтали от антенны эхолота до измеряемой глубины

σr, σp - СКП углов качки (R - крена, Р - дифферента),
σвк - СКП высоты вертикальной качки;
z - измеренная глубина;
Vзвср - средняя скорость звука в слое толщиной z,
 - СКП определения средней скорости звука;
- СКП определения средней скорости звука;
Vзва - скорость звука на горизонте антенны эхолота;
σзва - СКП определения скорости звука на горизонте антенны эхолота,
σос - СКП определения осадки судна при промере,
σпр - СКП учета высоты мгновенного уровня,
σобс - СКП обсервации положения судна на галсе,
σα - СКП определения истинного курса судна;
σхд, σуд, σzд - СКП измерения положения датчиков в судовой системе координат;
Δt - промежуток от обсервации до момента измерения глубины;
V - абсолютная скорость судна.
Погрешности глубины и ее положения при съемке многолучевым эхолотом рельефа дна рассчитывались по формулам (34), (35) для глубин в диапазонах 0-100 и 0-200 м, измеряемых по направлениям приема отраженных дном сигналов в диапазоне 0-60° через 3°. При расчетах СКП обсервации на галсе для первого диапазона глубин принималась равной 5 м, а для второго - 20 м.
СКП съемки рельефа дна многолучевым эхолотом по существующей технологии в диапазоне глубин 0-100 м показана на чертеже (фиг.12). На чертеже (фиг.13) показана СКП съемки рельефа дна многолучевым эхолотом по существующей технологии в диапазоне глубин 0-200 м.
Полученный результат показал, что существующая технология съемки рельефа дна с помощью многолучевых эхолотов не обеспечивает требуемую точность измерения глубин, т.к. погрешность определения глубины в 2-6 раз превышает допустимый уровень. Погрешность определения положения глубин в 6 раз превышает требуемую точность, главным образом, из-за принятого для расчетов низкого уровня точности обсерваций. При использовании для определения судна на галсе высокоточных РНС типа «Грас» или спутниковой РНС «ГЛОНАСС» в дифференциальном режиме работы отношение погрешности определения координат глубины и требуемой точности ее определения уменьшилось бы до 3. При этом съемка выполнялась МЛЭ, с формированием шести лучей через 1.5°. Начальный угол зондирования составил 45°, глубина - 200 м, бортовая и килевая качки с амплитудой 1.5° и 2.5° соответственно, вертикальная качка с амплитудой 1 м, частота посылок зондирующего импульса 1 изм./с, количество посылок - 115.
Значения средних квадратичных погрешностей глубины и ее положения соответственно при съемке рельефа дна известным способом и предлагаемым способом составили:
а) для глубины z=200 м угол наклона зондирующего луча 45-50°:
- предлагаемым способом σzn=0.32 м, σXyn=1.49 м;
- известным способом σzs=1.1 м; σXys=1.97 м;
б) для глубины z=200 м угол наклона зондирующего луча 55-60°:
- предлагаемым способом σzn=0.31 м, σXyn=0.92 м,
- известным способом σzs=1.49 м; σXys=1.89 м;
г) для глубины z=300 м угол наклона зондирующего луча 50-60°:
- предлагаемым способом σzn=0.56 м, σXyn=1.49 м,
- известным способом σzs=1.93 м; σXys=2.41 м;
д) для глубины z=200 м углы качки: бортовая - 6.5; килевая - 5.5°; σR=0.5%, угол наклона зондирующего луча 50-60°:
- предлагаемым способом σzn=0.52 м, σXyn=1.19 м,
- известным методом σzs=1.49 м; σXys=1.98 м.
Полученные результаты показывают, что предлагаемый способ съемки рельефа дна акватории обеспечивает более высокую точность по сравнению с традиционной: даже для критических условий - при углах наклона зондирующего луча 50-60° и максимальной глубине оцениваемого диапазона 200 м и более. СКП измерения глубины известным способом в 3.5-5 раз превышает СКП измерения глубины предлагаемым способом. СКП определения положения измеренной глубины при съемке по традиционной технологии для этих же условий в 1.6-2 раза превышает СКП координат глубины предлагаемым методом. При увеличении углов качки до 5-6° эти соотношения уменьшаются до значений 2.9 и 1.6.
Таким образом, предлагаемый способ съемки рельефа дна отвечает современным требованиям по точности и подробности измерения глубин, и его целесообразно использовать для съемки рельефа дна на акватории при производстве комплексных гидрографических исследований.
При использовании заявляемого способа и устройства для его осуществления, предназначенного для съемки рельефа дна акватории, выполняется требование к точности определения глубины при съемке рельефа дна акватории, установленное действующими нормативными документами, что обусловлено возможностью измерения доплеровского сдвига частоты опорного гидроакустического сигнала гидроакустического доплеровского лага, абсолютной скорости движения судна с эхолотом по внешним источникам информации (например, спутниковой навигационной системы типа GPS), по которым определяют среднюю вертикальную скорость распространения звука в водной среде. При съемке рельефа дна эхолотом средняя квадратическая погрешность определения вертикальной скорости распространения звука не должна превышать ±7,5 м/с.
Выполнение данного требования может быть обеспечено, если скорость движения судна будет определяться со средней квадратической погрешностью, не превышающей ±0,037 м/с, что возможно выполнить при условии определения геодезических координат со средней квадратической погрешностью, не превышающей ±7,8 м.
Установленные на гидрографических судах навигационные системы, в частности, совмещенные приемоиндикаторы спутниковых и радионавигационных систем берегового базирования позволяют определять геодезические координаты с точностью ±6.0 м, а при их работе в дифференциальном режиме с точностью ±3.0 м.
При сопряжении топографических и навигационных растровых карт при картировании рельефа дна ошибки получаемой растровой карты составляют не более двух пикселей, например, для масштаба карт 1:250000 с разрешением 400 dpi это составляет 30 м на поверхности Земли, что не превышает ошибок самой растровой карты.
Практическая реализация заявляемого способа и устройства для его осуществления технической сложности не представляет ввиду того, что для его реализации используются штатные измерительные средства, установленные на гидрографических судах, предназначенных для съемки рельефа дна.
Источники информации
1. Коломийчук Н.Д. Гидрография. Л., ГУНиО МО СССР, 1988, с.240-277.
2. Hare R. Depth and position error budgets for multibeam echosounding // International Hydrographic Review. 1995, v.LXXII, №2, p.37-69.
3. Патент RU №2010457.
4. Патент RU №2209530.
5. Патент RU №2292062.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ | 2012 |
|
RU2519269C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И ЭХОЛОТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2573626C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2009 |
|
RU2461021C2 |
| Способ определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории, и устройство для определения поправок к глубинам, измеренным многолучевым эхолотом при съемке рельефа дна акватории | 2019 |
|
RU2724366C1 |
| Устройство для определения поправок к глубинам, измеренным эхолотом при съемке рельефа дна акватории | 2018 |
|
RU2694084C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
| Способ определения поправок к глубинам, измеренным однолучевым эхолотом при съёмке рельефа дна акватории, и устройство для его осуществления | 2017 |
|
RU2649027C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2429507C1 |
Изобретение относится к гидрографии, в частности к способам и техническим средствам съемки рельефа дна путем определения глубин на заданной акватории с определением их геодезических координат. Техническим результатом изобретения является повышение точности съемки рельефа дна. Суть предлагаемого способа заключается в использовании опорных глубин и координат (глубин и координат на акватории съемки) и вычислении приращений глубин и координат как разности двух смежных измеренных многолучевым эхолотом векторов расстояний. Таким образом, каждая глубина и ее геодезические координаты вычисляются как сумма приращений смежных глубин и их геодезических координат, начиная с глубины и геодезических координат точки опорной глубины. Дополнительно предложено устройство для осуществления способа. 2 н. ф-лы, 13 ил.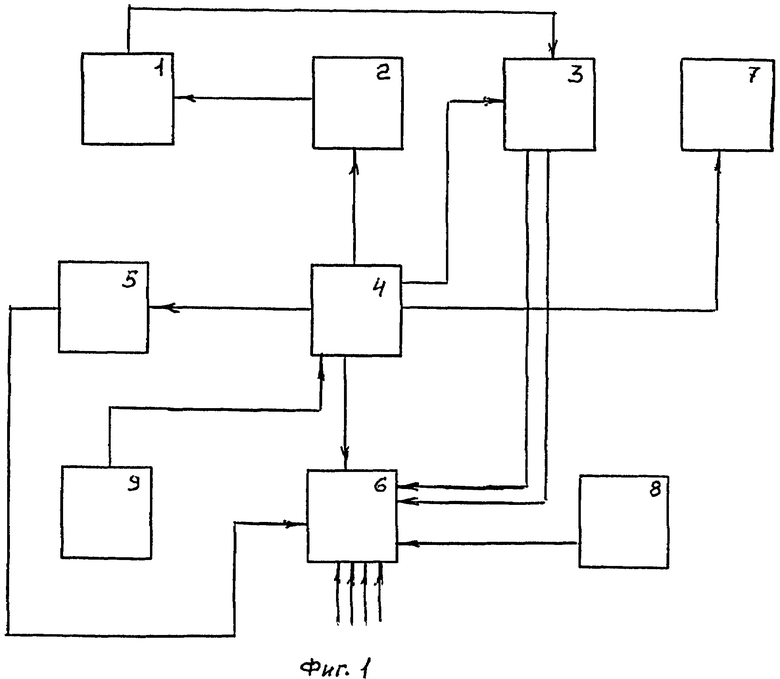
1. Способ съемки рельефа дна акватории эхолотом, установленным на судне, включающий движение судна по заранее установленным галсам, излучение гидроакустических сигналов в направлении дна, прием отраженных от поверхности дна сигналов, измерение расстояний от приемоизлучающей антенны до дна, определение координат судна по внешним источникам информации, измерение бортовой, килевой и вертикальной качки, истинного курса и скорости судна, привязку результатов измерений по времени, определение истинных значений глубин путем учета погрешностей, картирование полученной информации с определением геодезических координат измеренных глубин, определение высоты мгновенного уровня моря, отличающийся тем, что заранее установленные галсы располагают между предварительно выбранными опорными глубинами на поверхности дна акватории съемки, в координатных точках опорных глубин на дне акватории устанавливают пассивные или активные акустические отражатели, определяют глубины относительно нуля глубин над каждым из акустических отражателей и их геодезические координаты, измеряют крайними боковыми лучами эхолота наклонные расстояния до двух опорных глубин, выполняют измерения по замкнутому маршруту (галсу), заканчивая галс измерениями наклонных расстояний до тех же опорных глубин, что и в начале галса, либо до двух других опорных глубин, расположенных на поверхности дна на заданном расстоянии, при определении истинных значений глубин выполняют вычисления невязок, распределяемых в измеренные векторы положения точек дна, в конце каждого галса при картировании рельефа дна выполняют сопряжение топографических и навигационных растровых карт, измеряют временные интервалы распространения сигналов с последующим их преобразованием в дистанции между акустическими отражателями и гидроакустическими приемоответчиками, которые размещают на линии горизонта работы приемопередающей антенны эхолота, при этом формируют из приемников две навигационные базы с общим центром базы, располагая их в плоскости, параллельной плоскости линии горизонта работы приемопередающей антенны эхолота, при этом ось одной базы X направлена вдоль осевой линии эхолота, а ось другой базы Y направлена по траверзу вправо, высоту мгновенного уровня моря определяют непосредственно на горизонте приемоизлучающей антенны, учет погрешностей при определении истинных значений глубин выполняют путем приборного измерения скорости звука на горизонте приемоизлучающей антенны.
2. Устройство для осуществления способа по п.1, содержащее приемоизлучающую антенну, передающий блок, приемоизмерительный блок, блок определения средней скорости распространения звука в воде, блок управления и блок сбора, обработки информации и картирование рельефа дна акватории, в котором выход приемопередающей антенны подключен к входу приемоизмерительного блока, выход передающего блока соединен с приемоизлучающей антенной, выходы приемоизмерительного блока подключены к входу блока сбора обработки информации и картирования рельефа дна акватории, входы которого соединены с выходами судовых измерителей составляющих качки, курса, скорости и координат, а блок управления соединен с передающим блоком, приемоизмерительным блоком и блоком сбора информации, обработки и картирования рельефа дна, отличающееся тем, что дополнительно введен блок гидроакустических приемоответчиков, вход которого через блок управления соединен с выходом приемника радионавигационной или/и спутниковой навигационной системы, а выход соединен с входом блока сбора, обработки информации и картирования рельефа дна акватории, и устройство измерения уровня водной поверхности, которое своим выходом соединено с входом блока сбора и обработки информации.
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2340916C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИЙ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2292062C2 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ФОРМЫ РЕЛЬЕФА МОРСКОГО ДНА ПРИ ДИСКРЕТНЫХ ИЗМЕРЕНИЯХ ГЛУБИН ПОСРЕДСТВОМ ГИДРОАКУСТИЧЕСКИХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326408C1 |
| JP 7140243 А, 02.06.1995 | |||
| JP 4372890 А, 25.12.1992. | |||

