Изобретение относится к области судовождения, в частности к навигации, а более конкретно к техническим средствам навигации определения местоположения и скорости преимущественно крупнотоннажных судов, перевозящих опасные грузы.
Известны устройства для определения местоположения и скорости высокоскоростных судов (патент RU №2072547 [1], патент RU №2068570 [2], патент RU №2079836 [3], патент RU №2079859 [4], патент RU №2071034 [5], патент GB №1166976 опубл. 15.10.1969 [6], патент US №5711239 опубл. 27.01.1998 [7], Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991, с.6-8 [8], патент JP №9142373 А, 03.06.1997 [9], патент US 5237952 А, 24.08.1993 [10]), которые включают аппаратуру радионавигационных и спутниковых систем, датчики курса, скорости, радиопеленгаторы, информация от которых обрабатывается в вычислителе и выводится на пульт оператора, с трансляцией на системы судовой автоматики, включая рулевое устройство.
В известных устройствах решаются такие навигационные задачи, как автономное счисление пути судна (определение скорости, курса, пройденного расстояния, счислимых координат места судна); определение обсервованных координат по радионавигационным и спутниковым навигационным системам, что обеспечивает решение основных штурманских задач для судовождения.
В навигационном комплексе [5] для повышения точности определения текущих координат и пространственных углов (курса и тангажа) летательных аппаратов, навигационный комплекс состоит из аппаратуры потребителя спутниковой навигационной системы, датчик углов крена, тангажа, атаки и скольжения, трехстепенного магнитного датчика направления, установленного в связанной системе координат, и бортового вычислителя, выполненного с возможностью совместной обработки сигналов от всех датчиков. Комплекс может также включать датчики линейных ускорений и угловых скоростей.
Существенными недостатками известных устройств являются значительные массогабаритные характеристики, что обусловлено необходимостью дублирования и резервирования отдельных технических средств для обеспечения требований по надежностным и точностным характеристикам, а также наличием значительного количества трансляционных приборов и приборов сопряжения (ЦАП, АЦП и т.п.), последнее обстоятельство обуславливает уменьшение точности вырабатываемых навигационных параметров при их трансляции на судовые системы автоматики. Уменьшение точности может достигать 30% на входе судовых систем по сравнению с точностью на выходе навигационных систем, что в конечном итоге может отрицательно сказаться на навигационной безопасности при эксплуатации высокоскоростных судов. Известные устройства используются на крупнотоннажных судах, имеющих существенные площади для размещения навигационной аппаратуры, и поэтому задача повышения надежности решается путем установки дополнительного навигационного оборудования.
На высокоскоростных судах, имеющих ограничения по массогабаритным характеристикам, установка дополнительной навигационной аппаратуры является весьма трудоемкой задачей.
Известен навигационный комплекс (Пирогов Н.Н., Чернявец В.В. Навигационный комплекс для катеров на подводных крыльях // Зарубежное военное обозрение, №4, 1986, с.58-59 [11]), предназначенный для установки на высокоскоростные суда, и в частности на суда на подводных крыльях, который состоит из ЭВМ, преобразователя данных, гирокомпаса, двух РЛС, устройства записи на магнитную ленту, каретки телевизионной камеры, телевизионной камеры, стола с навигационной картой, процессора обработки радиолокационной информации, управляющего программного генератора, буквенно-цифрового генератора, преобразователя развертки, устройства совмещения картографического и радиолокационного изображений обстановки, дисплея графического отображения на экране картографической и радилокационной обстановки, дисплея буквенно-цифровой информации о картографической обстановке и элементах движения целей, магнитофона для записи картографической и радиолокационной обстановки, пульта управления и контроля, телевизионной камеры внешнего обзора.
В данном устройстве текущие координаты места вычисляются по значениям курса и скорости, поступающим в ЭВМ от гирокомпаса и лага через преобразователь данных. Вычисленные счислимые координаты в процессе плавания уточняются путем совмещения на экране телевизионной трубки изображения навигационной карты, поступающего с ЭВМ при использовании аппроксимированной цифровой карты либо с телевизионной камеры при использовании обычных навигационных карт, с радиолокационного изображения того же района плавания, выдаваемого одной из РЛС.
Данное устройство может использоваться для обеспечения навигационной безопасности плавания только при плавании в прибрежной зоне, так как выработка обсервованных координат обусловлена дальностью действия РЛС и наличием береговых ориентиров. Вне зоны действия РЛС данный навигационный комплекс обеспечивает вычисление только счислимых координат, вырабатываемых по данным лага и курсоуказателя, что сказывается негативно на требуемых точностных характеристиках для этого типа судов.
Известно также устройство (Сазонов А.Е., Родионов А.И. Автоматизация судовождения. - М.: Транспорт, 1977, с.185-196 [12]), которое предназначено для обеспечения безопасности плавания высокоскоростных судов, в частности для судов на воздушной подушке.
Известный навигационный комплекс состоит из приемоиндикатора фазовой радионавигационной станции, доплеровской системы измерения скорости, гирокомпаса, радиолокационной станции с индикатором кругового обзора, индикаторов пройденного расстояния и скорости относительно Земли, цифровой вычислительной машины, автопрокладчика авиационного типа, навигационного пульта управления с индикатором команд управления, авторулевого и оптической навигационной приставки, в котором цифровая вычислительная машина первым входом соединена с выходами приемоиндикатора радионавигационной станции, индикаторами дрейфа и скорости, и системы измерения скорости соответственно, а входом-выходом с выходом гирокомпаса и входом авторулевого и оптической навигационной приставки, вторым выходом соединена со входом индикаторов расстояния и скорости, а еще одним выходом со входом-выходом навигационного пульта управления, входом автопрокладчика и входом индикатора кругового обзора.
Данное построение навигационного комплекса обеспечивает решение следующих основных задач: определение места судна, предупреждение столкновения судов, управление судном при маневрировании, что обеспечивает в основном режиме непрерывное счисление пути и получение обсервованных координат места судна по радионавигационной системе "Декка" с автоматической прокладкой пути. В этом случае координаты места получают после их фильтрации посредством алгоритма, реализуемого с помощью цифровой вычислительной машины. Данный навигационный комплекс работает либо в режиме счисления пути, либо определения обсервованных координат по радионавигационной системе. На навигационном пульте индицируются вычисленные на цифровой вычислительной машине курс судна, скорость относительно Земли, широта и долгота места, смещение с заданной линии пути по перпендикуляру к нему, дрейф, направление и расстояние до точки назначения. От цифровой вычислительной машины информация также поступает на рулонный автопрокладчик. Навигационный комплекс в случае выхода из строя тех или иных датчиков навигационной информации обеспечивает автоматическое переключение на действующий источник информации. При выходе из строя доплеровского лага и гирокомпаса цифровая вычислительная машина ведет счисление и выдает информацию на автопрокладчик и для стабилизации истинного движения на индикаторе кругового обзора радиолокационной станции по значениям угла дрейфа и скорости, вводимым вручную.
С целью оптимального управления судном в цифровой вычислительной машине записаны программы управления, учитывающие его аэродинамические характеристики, вырабатывающие сигналы для управления и передающие их на авторулевой.
Данный навигационный комплекс, благодаря своему построению, отличается от известного устройства. Однако эксплуатация высокоскоростных судов характеризуется такими особенностями, как высокая скорость (до 100 уз и более), повышенная опасность столкновения из-за плохой управляемости вследствие рыскания и сноса под действием ветра и волнения, например, при движении на воздушной подушке, когда на качество управления значительное влияние оказывает воздействие аэродинамических сил, ограниченная дальность визуального и радиолокационного наблюдения, вследствие небольшой высоты корпуса, повышенные шумы работающих двигателей, число которых может достигать десяти, что исключает прием звуковых сигналов, а соответственно и повышает вероятность столкновения. Эти ограничения предъявляют повышенные требования к навигационным комплексам судов данного типа и прежде всего по точности и времени определения их места, непрерывности измерения основных навигационных параметров (координаты, скорость, курс), степени автоматизации, информативности и надежности, так как высокие скорости исключают ведение навигационной прокладки обычными методами, так как с момента измерения навигационного параметра до момента получения координат места пройдет время, за которое координаты судна существенно изменятся.
Известен также навигационный комплекс (патент RU №64588 U1 [13]), включающий навигационные и радионавигационные средства, гидрометеорологическое обеспечение, а также инерциальную систему навигации и стабилизации. При этом приборы инерциальной системы закоммутированы с техническими средствами судовой автоматики, в том числе с системой управления рулевой машиной, и снабжены датчиками. Система обеспечивает возможность получения текущих данных о географическом курсе судна в плоскости горизонта, географических координатах - широте и долготе места нахождения судна, углах бортовой качки, измеренной в плоскости шпангоута, и килевой качки, измеренной в диаметральной плоскости, угловой скорости качки и изменения курса, двух составляющих линейной скорости судна в месте установки гироприбора в географической системе координат, трех составляющих мгновенной скорости судна, вызванной качкой и орбитальным движением корабля в месте установки гироприбора в географической системе координат, и о суммарном угле наклона палубы. При этом инерциальная система навигации и стабилизации содержит путевой магнитный компас с компенсирующим устройством, например, типа КМ-145-4.
Устройство обеспечивает измерение магнитного и определение истинного курса, судна, магнитных пеленгов и курсовых углов с погрешностью от ±0,5° на неподвижном основании до ±5° на прямом курсе, при бортовой качке с амплитудой 30° и килевой качке с амплитудой 10°.
Лаг индукционный, например ЛИ2-1, предназначен для измерения скорости судна относительно воды, вычисления пройденного расстояния и выдачи данных на репитеры навигационных приборов и информационные табло системы управления рулевой машиной с инструментальной погрешностью измерения скорости в диапазоне температур от нуля до пятидесяти градусов - ±0,1 узла и остаточной погрешностью в диапазоне скорости от десяти до двадцати узлов, не более ±0,25 узла. Кроме того, инерциальная система навигации и стабилизации оснащена автопрокладчиком, например, типа «Топаз-11356», предназначенным для автоматического счисления текущих географических координат и автоматической прокладки пути судна в переменном масштабе на картах меркаторской проекции или в постоянном масштабе, например на бумаге, и выдачи счисленных географических координат. Для указанного аппарата обеспечена работа в пределах: по скорости до пятидесяти узлов с учетом течения, по курсу без ограничений, по широте в интервале ±75°, по долготе без ограничений.
Радионавигационные средства, установленные на судне, включают два судовых навигационных приемоиндикатора, например, типа Husun MX 412 со встроенными приемниками дифференциальных поправок. Они предназначены для определения текущих значений навигационных параметров по сигналам спутниковых навигационных систем, например GPS, а также для определения координат судна по сигналам береговых радионавигационных систем с автоматической выработкой текущих географических, а также ортодромических координат и вектора путевой скорости судна по сигналам импульсно-фазовых радионавигационных систем.
Установленный на судне комплекс гидрометеорологической информации предназначен для получения и обработки текущей гидрометеорологической информации, а также температуры и влажности, по крайней мере, в части помещений судна. Данный комплекс включает блок приема и обработки гидрометеорологической информации и подключенные к нему два датчика скорости и направления ветра, предпочтительно, акустические, а также размещенные на открытой части судна датчики температуры и влажности наружного воздуха и размещенные датчики температуры и влажности внутреннего воздуха соответствующих помещений судна.
Кроме того, в комплекс гидрометеорологического обеспечения включены, по крайней мере, по одному датчику атмосферного давления, нижней границы облачности, видимости, по крайней мере, по одному компьютеру с принтером для отображения гидрометеорологической информации и с принтером для отображения температуры и влажности, выносные табло гидрометеорологической информации, установленные в командных постах, а также не менее чем один настроенный на прием гидрометеорологической информации радиоприемник с антенным устройством.
Аналогичное оснащение навигационными и радионавигационными средствами, а также комплексом гидрометеорологического обеспечения представлено и в известном техническом решении (патент RU №65016 U1 от 27.07.2007 [14], которое включает инерциальную систему навигации и стабилизации, приборы которой могут быть закоммутированы с техническими средствами корабля, в том числе с системой управления рулевой машиной, и могут быть снабжены датчиками, обеспечивающими возможность получения текущих данных о географическом курсе судна в плоскости горизонта, географических координатах - широте и долготе места нахождения судна, углах бортовой качки, измеренной в плоскости шпангоута и килевой качки, измеренной в вертикальной плоскости, угловой скорости качки и изменения курса; двух составляющих линейной скорости судна в месте установки гироприбора в географической системе координат; трех составляющих мгновенной скорости судна, вызванной качкой и орбитальным движением судна в месте установки гироприбора в географической системе координат, и о суммарном угле наклона палубы, при этом инерциальная система навигации и стабилизации может содержать путевой магнитный компас с компенсирующим устройством, например, типа КМ-145-4, обеспечивающим измерение магнитного и определение истинного курса судна, магнитных пеленгов и курсовых углов с погрешностью от ±0,5° на неподвижном основании до ±5° на прямом курсе, при бортовой качке с амплитудой 30° и килевой качке с амплитудой 10°; лаг индукционный, например, ЛИ2-1, предназначенный для измерения скорости судна относительно воды, вычисления пройденного расстояния и выдачи данных на репитеры навигационных приборов и информационные табло системы управления рулевой машиной с инструментальной погрешностью измерения скорости в диапазоне температур от нуля до пятидесяти градусов - ±0,1 узла и остаточной погрешностью в диапазоне скорости от десяти до двадцати узлов, не более ±0,25 узла, кроме того, инерциальная система навигации и стабилизации может быть оснащена предназначенным для автоматического счисления текущих географических координат и автоматической прокладки пути судна в переменном масштабе на картах меркаторской проекции или в постоянном масштабе, например, на бумаге и выдачи счисленных географических координат автопрокладчиком, например, типа АП-4-956 с обеспечением работы указанного аппарата в пределах: по скорости до пятидесяти узлов с учетом течения, по курсу без ограничений, по широте в интервале ±75°, по долготе без ограничений.
Радионавигационные средства могут включать судовой навигационный приемник, например, типа СН-3101, для определения текущих значений навигационных параметров по сигналам спутниковых навигационных систем, например GPS и ГЛОНАСС, а также не менее одного приемоиндикатора для определения координат судна по сигналам береговых радионавигационных систем, а также не менее одного приемоиндикатора с автоматической выработкой текущих географических, а также ортодромических координат и вектора путевой скорости судна по сигналам импульсно-фазовых радионавигационных систем.
Комплекс гидрометеорологической информации, предназначенный для получения и обработки текущей гидрометеорологической информации, а также температуры и влажности, по крайней мере, в части помещений судна, может включать блок приема и обработки гидрометеорологической информации и подключенных к нему не менее двух, предпочтительно, акустических датчиков скорости и направления ветра, а также размещенными на открытой части судна датчиками температуры и влажности наружного воздуха и датчиками температуры и влажности внутреннего воздуха соответствующих помещений судна, кроме того, в комплекс гидрометеорологического обеспечения могут быть включены, по крайней мере, по одному датчику атмосферного давления, нижней границы облачности, видимости, по крайней мере, по одному компьютеру с принтером для отображения гидрометеорологической информации и с принтером для отображения температуры и влажности, по крайней мере, в погребах хранения опасных веществ, выносные табло гидрометеорологической информации, установленные в командных постах, а также не менее чем один настроенный на прием гидрометеорологической информации радиоприемник с антенным устройством.
В известных навигационных комплексах увеличение точности навигационных измерений получается за счет комплексирования, различных по принципам действия, навигационных подсистем, включенных в состав навигационного комплекса. При этом под комплексированием двух и более навигационных датчиков понимается совместная обработка их сигналов таким образом, чтобы уменьшить ошибки измерения. Однако, как показано в [5], если спектр ошибки первого навигационного датчика имеет широкую полосу, а второго узкую, то на выходе системы обработки (фильтра) будет иметь место ослабление обеих составляющих ошибок. Наибольший выигрыш от комплексирования получается при малом пересечении энергетических спектров ошибок этих измерителей.
Известен также навигационный комплекс, в котором технический результат заключается в повышении точности определения основных навигационных параметров, степени автоматизации, информативности и надежности посредством навигационного комплекса преимущественно высокоскоростных судов (патент RU №2260191, 10.09.2005 [15]).
Для достижения технического результата в навигационном комплексе [15], состоящем из приемоиндикатора, измерителей скорости, курса, автопрокладчика, вычислителя, навигационного пульта управления, эхолота и индикаторов и в котором навигационный пульт управления соединен с радиолокационной станцией и авторулевым, введены электронная картографическая навигационная система, блок сопряжения с рулевым приводом и магистраль обмена информацией, соединенная своими входами-выходами с входами-выходами приемоиндикатора, измерителей скорости и курса, автопрокладчика, вычислителя, навигационного пульта управления, электронной картографической навигационной системой, радиолокационной станцией, блоком сопряжения с рулевым приводом и эхолотом, при этом приемоиндикатор выполнен в виде совмещенного приемоиндикатора радионавигационных и космических систем.
При этом решается задача повышения точности определения основных навигационных параметров, степени автоматизации, информативности и надежности за счет ввода новых элементов, соединенных через единую магистраль обмена информацией, что уменьшает количество преобразователей информации.
Наличие комплексного приемоиндикатора спутниковых и радионавигационных систем обеспечивает прием сигналов как от радионавигационных систем, так и спутниковых навигационных систем, наличие электронной картографической навигационной системы, что позволяет совмещать радиолокационное изображение с картографическим, а также картографическое с отображением рельефа дна, соединенных с другими навигационными устройствами через магистраль обмена информацией, а также наличие блока сопряжения с рулевым приводом, что обеспечивает траекторное управление судном в зависимости от факторов, влияющих на управляемость, повышает безопасность плавания высокоскоростных судов за счет оперативной обработки существенного объема информации от навигационных устройств в реальном масштабе времени с отображением места судна и результатов решения навигационных задач на электронной карте, а также обеспечивается возможность траекторного управления судном.
Однако известный навигационный комплекс имеет ограниченное применение, в основном на малотоннажных судах.
В то же время освоение морских месторождений углеводородов, включая моря Северного Ледовитого океана, связано с обеспечением навигационной безопасности крупнотоннажных судов, предназначенных для транспортировки углеводородов, как в открытом море, так и на акватории надводных и подводных терминалов по отгрузке углеводородов. При этом плавание и погрузка на борт судна углеводородов, в большинстве случаев, будет отягощена неблагоприятными погодными условиями (малая дальность видимости, волнение, ветра, наличие льда, включая торосы и айсберги, и т.д.).
Задачей предлагаемого технического решения является расширение функциональных возможностей навигационного комплекса, с одновременным повышением степени безопасности плавания.
Поставленная задача решается за счет того, что в навигационный комплекс, состоящий из приемоиндикатора радионавигационных и спутниковых навигационных систем, измерителей скорости, курса и линейных ускорений и угловых скоростей, автопрокладчика, вычислителя, навигационного пульта управления, эхолота, индикатора, радиолокационной станции, авторулевого, электронной картографической навигационной системы, блока сопряжения с рулевым приводом, блока ситуационного анализа, функционально соединенных посредством магистрали обмена информацией, при этом измеритель скорости выполнен в виде совмещенной системы измерения скорости и параметров волнения, при этом измерители курса и линейных ускорений и угловых скоростей образуют инерциальную навигационную систему, согласно изобретению дополнительно введены автоматическая идентификационная система сопровождения целей, соединенная своим входом-выходом с навигационным пультом управления, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием, соединенный своим входом-выходом с навигационным пультом управления, еще два четырехканальных приемоиндикатора спутниковых навигационных систем, антенны которых установлены соответственно в носовой и кормовой частях судна, соединенные с магистралью обмена информацией, а инерциальная навигационная система еще также соединена своим входом с выходом приемоиндикатора радионавигационных и спутниковых навигационных систем, при этом приемоиндикатор радионавигационных и спутниковых навигационных систем содержит четыре дополнительных канала для измерения дельтапсевдодальностей до четырех искусственных спутников Земли и навигационный фильтр для моделирования движения судна, при этом индикатор выполнен в виде многофункционального дисплея; автопрокладчик выполнен с возможностью формирования 3D-изображения с постоянным трехмерным представлением данных и загрузкой растровыми и векторными картами и векторной картографией; эхолот выполнен с двухчастотным излучением 50/200 кГц с функцией различения эхосигналов; инерциальная навигационная система состоит из бесплатформенного инерциального измерительного модуля на волоконно-оптических гироскопах, микроакселерометров и микровычислителя; еще два приемоиндикатора спутниковых навигационных систем, антенны которых установлены в носовой и кормовой частях судна, содержат четыре канала приема спутниковых сигналов для измерения дельтапсевдодальностей до четырех искусственных спутников Земли и навигационные фильтры для моделирования движения судна; электронная картографическая навигационная система содержит набор растровых и векторных карт, и спутниковые фотографии; индикатор выполнен с возможностью отображения цветовых оттенков по глубинам, углам качки и элементов движения целей.
Сущность предлагаемого технического решения поясняется чертежом.
Фиг.1. Блок-схема навигационного комплекса. Навигационный комплекс содержит магистраль обмена информацией 1, навигационный пульт управления 2, вычислитель 3, электронную картографическую навигационную систему 4, автопрокладчик 5, измеритель скорости 6, измеритель курса 7, приемоиндикатор 8 радионавигационных и спутниковых навигационных систем, блок сопряжения с рулевым приводом 9, инерциальную навигационную систему 10, автоматическую идентификационную систему сопровождения целей 11, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием 12, эхолот 13, РЛС 14, комплекс гидрометеорологической информации 15, блок ситуационного анализа 16, приемоиндикаторы 17, 18 спутниковых навигационных систем, авторулевой 19, индикатор 20.
Магистраль обмена информацией 1. Обмен информацией организован в соответствии с ГОСТ 26765.52-87. Аналогом является устройство, описанное в патенте RU №2068579.
При этом реализованы протоколы обмена SRI, RS232, NMEA0183 и CAN. Магистраль обмена информацией 1 состоит, как и в прототипе, из шины данных, приемника, передатчика, кодера-декодера, сетевого контроллера, блока связи с потребителями навигационной информации, формирователя сигналов, схемы ИЛИ, блока динамического приоритета.
Навигационный пульт управления 2 выполнен на основе микропроцессора со специальным программным обеспечением, позволяющим осуществлять ввод/вывод информации, преобразование сигналов от всех навигационных датчиков (приборов), например микропроцессоров семейства AVR фирмы АТМЕС.
Навигационный пульт управления 2, как и в прототипе, может содержать центральный процессор, ОЗУ, ПЗУ, модульный параллельный интерфейс, устройство параллельного обмена, блок для отображения информации на электронно-лучевой трубке, блок отображения информации на газоразрядной индикаторной панели, устройство для цифровой индикации, электронно-лучевую трубку, газоразрядную индикаторную панель, цифровые индикаторы, блок управления.
Вычислитель 3 выполнен на основе DSP-процессора и предназначен для обработки сигналов по определению комплексных навигационных параметров и включает процессор, сопроцессоры, блок памяти, таймер, контроллер прерываний, порты связи.
Электронная картографическая система 4 включает блок оцифровки видеосигнала, преобразователь видеосигналов, блок совмещения радиолокационной и картографической информации, модуль программного обеспечения и информационно-вычислительное устройство.
В блоке оцифровки видеосигнала производится оцифровка видеосигнала. В преобразователе видеосигналов осуществляется перевод оцифрованного видеосигнала в соответствующий масштаб и систему координат. В блоке совмещения радиолокационной и картографической информации производится наложение радиолокационного сигнала на изображение карты. В модуле программного обеспечения находится программный продукт, обеспечивающий функционирование блока совмещения радиолокационной и картографической информации, при использовании официальных картографических данных, соответствующих стандарту INO S-57, навигационных карт издания Главного управления Навигации и Океанографии МО РФ и мировых коллекций электронных навигационных карт типа С-МАР в формате СМ-93. В информационно-вычислительном устройстве осуществляется индикация электронной карты, прием, обработка и передача сообщений по стандарту NMEA-0183. В информационно-вычислительном устройстве также выполняются вычислительные операции, по формированию зоны безопасности плавания по допустимому расстоянию до навигационной опасности или по допустимому времени движения до опасности с текущей скоростью; расчету уровня приливов; трехмерному моделированию рельефа дна на основе батиметрических данных, содержащихся на текущей карте, а также по данным, измеренным эхолотом, с отображением рельефа дна; автоматизированной корректуре карт, сконвертированных из формата S-57; формированию электронного судового журнала; прогнозу положения судна; обсервованному счислению по данным, вырабатываемым РЛС; расчету текущего траверзного расстояния до ориентира, определению места судна по пеленгам и дистанциям с вычислением поправок к счислимым координатам, величин и направления невязок, с вычислением радиальных среднеквадратических погрешностей обсерваций; контролю целей РЛС (дистанция кратчайшего сближения, время до кратчайшего сближения, скорость и курс цели), расчету времени прибытия в заданную точку; счислению пути судна, составлению навигационного формуляра; предварительной прокладке; расчету поправок системы координат.
Информационно-вычислительное устройство построено на основе процессора Intel Core2Duo.
Автопрокладчик 5 представляет собой прокладчик курса типа GD-1920С с использованием карт типа NT MAX стандарта С-МАР, которые поддерживают отображение навигационных знаков, приливных течений, фарватеров.
Измеритель скорости 6. В качестве измерителей скорости могут быть использованы доплеровские гидроакустические, индукционные электромагнитные и радиодоплеровские, включая совмещенные радиодоплеровские системы измерения скорости и параметров волнения, или их сочетание, например, доплеровский гидроакустический лаг и совмещенная радиодоплеровская система измерения скорости и параметров волнения (Оценка работы лагов на ледоколе / А.Г.Гузеев, Н.Н.Пирогов, В.В.Чернявец и др. // Судостроение, №1, 1981, с.30-31. Совершенствование доплеровских радиолагов, устанавливаемых на судах ледового плавания / Чернявец В.В., Перепелицын О.В., Харитонов Ю.П. и др. // Судостроение, №1, 1987, с.26-27. Ванаев А.П., Чернявец В.В. Определение параметров волнения совмещенной системой измерения скорости судна и высоты волны / Судостроение, №8-9, 1993, с.6-8).
Измеритель курса 7 представляет собой гирогоризонткомпас, состоящий из гирокомпаса, блока поправок, измерителей угловых ускорений с взаимно ортогональными осями чувствительности, ньюмометров с взаимно ортогональными осями чувствительности, вычислителя углов качки и курса. Аналогом является устройство, описанное в патенте RU №2056037. В конкретном устройстве использовано изделие по ИДТЛ 461.529.006 ТУ.
Совмещенный приемоиндикатор 8 радионавигационных и спутниковых навигационных систем состоит из антенного блока, приемоиндикатора и сетевого адаптера и обеспечивает автоматический выбор оптимального созвездия навигационной аппаратуры ГЛОНАСС и GPS, а в зоне действия РНС прием сигналов от наземных станций; интегральную оценку ожидаемой точности определения текущих координат; ввод и обработку корректирующей информации в соответствии с RTCM SC-104; решение навигационной задачи при работе в дифференциальном режиме; ввод и хранение до 500 маршрутных точек и до 50 маршрутов движения; запоминание текущих координат в качестве маршрутной точки; расчет расстояния и направления между двумя маршрутными точками движения по маршруту с выработкой параметров отклонения от маршрута; вывод координат в системе координат WGS-84, ПЗ-90, СК-42 или в системе координат, параметры которой задаются оператором посредством навигационного пульта управления 2; выбор береговых РНС различного радиуса действия (ближнего, дальнего) и определения координат по их сигналам с оценкой точности. В конкретном устройстве применен приемоиндикатор типа NT-300. Прием и обработка сигналов системы GPS производится по пяти каналам, а системы ГЛОНАСС по трем каналам.
В отличие от прототипа приемоиндикатор 8 радионавигационных и спутниковых навигационных систем содержит четыре дополнительных канала для измерения дельтапсевдодальностей до четырех искусственных спутников Земли и навигационный фильтр для моделирования движения судна, что при непрерывных измерениях дельтапсевдодальностей до четырех спутников, исключив систематическую погрешность эталона частоты приемоиндикатора, позволяет измерить координаты точки судна, совмещенной с фазовым центром антенны приемоиндикатора 8.
Блок сопряжения с рулевым приводом 9, как и в прототипе, содержит приемное устройство, множитель, блок формирования восстановленного сигнала перекладки руля, блок формирования сигнала скорости перекладки руля, блок формирования модели рулевого привода, сумматоры, интеграторы, вычислитель, который собран на основе микропроцессора DSP-процессора, работающего под управлением встраиваемой операционной системы «UCLinux». Аналогом является устройство, описанное в патенте RU №2072547. Обработка сигналов осуществляется в соответствии с алгоритмами, приведенными в кн. Управление подвижными морскими объектами / Лернер Д.М., Лукомский Ю.А., Михайлов В.А. и др. - Л.: Судостроение, 1979. Блок сопряжения с рулевым приводом 9 предназначен для формирования сигналов управления авторулевому, позволяющих осуществлять выход и стабилизацию судна на маршруте с минимальным перерегулированием. Блок сопряжения с рулевым приводом 9 может функционировать с любым авторулевым, принимающим управляющие сообщения по стандарту NMEA-183 с реализацией режима стабилизации судна на модифицированном маршруте. В этом режиме производится модификация исходного кусочно-прямолинейного маршрута (алгоритмы Rout Modification и Rout Preparation) путем гладкого сопряжения галсов непрерывной криволинейной траекторией, реализуемой судном при назначенных ограничениях на угол перекладки руля в процессе поворота. При этом на электронной картографической навигационной системе 4 отображается исходный и модифицированный маршруты с целью предоставления судоводителю предполагаемого движения судна.
При прохождении маршрута вблизи зон с навигационными опасностями обеспечивается возможность корректировки как положения поворотных точек, так и изменения радиуса поворота судна путем редактирования величины предельного угла перекладки руля в каждой поворотной точке. Управление судном на модифицированном маршруте осуществляется специальными алгоритмами, формирующими для авторулевого сигналы: типа ХТЕ, равный тождественному нулю, и непрерывный изменяющийся сигнал bearin to origin. Для отслеживания этих сигналов авторулевой переключается в режим Remout Control, в котором не требуется подтверждения оператором нового заданного курса. Алгоритмы управления судном на траектории и модификации маршрута используют для своей работы математическую модель судна, учитывающую управляющее воздействие руля, действующие на судно возмущения, а также факторы, изменяющие динамику судна - загрузку, изменение мощности, скорость судна.
Основными алгоритмами являются алгоритмы управления рулевым приводом, стабилизации курса судна, маневрирования курсом, управления движением по заданному маршруту, восстановления параметров движения судна, адаптации законов управления движением судна. При этом алгоритмы обеспечивают решение таких задач, как стабилизация судна на заданном курсе; управление маневрированием курсом; восстановление и фильтрация угловой скорости судна; адаптация параметров регуляторов авторулевого; управление движением по заданному маршруту.
Для решения данных задач на блок сопряжения с рулевым приводом 9 поступает информация о курсе и угловом ускорении с измерителя курса 7, о скорости с измерителя скорости 6, о положении руля от датчика угла перекладки руля, о положении золотника рулевой машины, принимаемом от датчика исполнительного механизма, о заданном маршруте (заданный курс, координаты места, боковое перемещение) с навигационного пульта управления 2. При этом адаптация регуляторов авторулевого производится к скорости хода судна, глубине моря, погодным условиям, загрузке судна, конкретным характеристикам судна, соответствующим приведенным в лоцманской карте и таблице маневренных элементов данного судна.
Программное обеспечение реализовано на языке ALGOL-68 в Кросс-системе.
Аппаратные средства обеспечивают независимое управление приводов каналов крена и курса, осуществляют измерение углов курса, крена и дифферента судна, измерение компонент векторов угловой скорости, линейного ускорения, формируют управляющие сигналы для решения целевых задач управления и стабилизации.
Независимый привод каждого из каналов управления построен на основе системы привода производства компании «Faulhaber». Высокоточная цифровая система управления приводом обеспечивает высокое быстродействие, позволяет регулировать параметры привода в широком диапазоне, обеспечивает точное позиционирование по углу поворота оси привода колеса.
Микропроцессор на основе DSP-процессора является устройством, обеспечивающим программную и аппаратную интеграцию отдельных блоков, входящих в состав аппаратных средств авторулевого. Микропроцессор позволяет выполнять операции над 32-разрядными числами в формате с плавающей запятой, что обеспечивает точность вычислений, достаточную для решения большинства задач управления и навигации. Тактовая частота процессора составляет 400 МГц. Помимо процессора в состав платы вычислительно-управляющего модуля входят микросхемы памяти SDRAM, микросхемы памяти flash, микросхемы интерфейсов ввода-вывода.
Инерциальная навигационная система 10 состоит из бесплатформенного инерциального измерительного модуля на волоконно-оптических гироскопах, микроакселерометров и микровычислителя и соединена своим входом с выходом приемоиндикатора 8 радионавигационных и спутниковых навигационных систем для выработки поправок к углам курса. Инерциальная навигационная система 6 определяет углы курса, крена и дифферента, обеспечивает систему управления инерциальной и навигационной информацией.
Автоматическая идентификационная система сопровождения целей 11 включает приемник типа FA-30 и транспондер типа FA-150 и предназначена для одновременного сопровождения до 100 целей. Исходные данные включают в себя координаты, курс и скорость относительно грунта, что дает возможность заранее рассчитать изменения курса интересующих целей, в том числе крупных ледовых полей и айсбергов.
Гидролокатор шагового поиска с горизонтальным и вертикальным сканированием 12 представляет собой двухчастотный гидролокатор. Высокочастотный и низкочастотный (60/153 или 85/215 кГц) встроены в один корпус. Предназначен для горизонтального и вертикального сканирования, сканирования по кругу, а также комбинированного вертикального сканирования и сканирования по полному или половине круга. Аналогом является гидролокатор шагового поиска с горизонтальным и вертикальным сканированием типа СН-300.
Эхолот 13 представляет собой многолучевой эхолот со сложным линейно-частотным модулированным сигналом и предназначен для измерения глубин от 20 до 6000 м. Развертка мощности принятых сигналов осуществляется по дальности и углу. Характер изменения мощности в луче с дальностью зависит от формы рельефа дна. Из 32 приемных каналов формируют 256 лучей, что позволяет получить квазинепрерывный профиль рельефа. Приемная антенна многолучевого эхолота 3 диапазона частот 30 кГц состоит из 32 элементов. Эхолот 13 выполнен с двухчастотным излучением 50/200 кГц с функцией различения эхосигналов.
РЛС 14 представляет собой двух диапазонную радиолокационную станцию (3/10 см).
Комплекс гидрометеорологической информации 15 представляет собой судовой гидрометеорологический комплекс типа «КОСМЕТЕО-К» и обеспечивают получение, обработку, регистрацию, отображение и выдачу потребителям следующей информации:
- гидрометеорологических параметров окружающей среды;
- метеорологической информации от метеорологических искусственных спутников (МИСЗ) типа «Метеор», «NOAA» в виде снимков подстилающей поверхности и облачного покрова Земли;
- факсимильной и телеграфной информации от радиометеорологических центров.
Аналогом является устройство, приведенное в описании к патенту RU №2344448.
Блок ситуационного анализа 16 построен на основе процессора Intel Core2Duo.
При плавании в стесненных навигационных обстоятельствах, при подходе к таким районам получают спутниковые данные высокого разрешения типа ASTER или SRTM данного района плавания, по которым посредством программ моделирования водной поверхности типа Hydrax, атмосферных и астрономических явлений типа Skyx производится рендеринг окружающей обстановки, посредством программы PhysX восстанавливают топологию корпуса судна путем построения цифровой модели корпуса судна по сечениям корпуса судна по шпангоутам, моделируют динамику судна при прохождении района со стесненными обстоятельствами плавания, с учетом волнового и ветрового воздействия.
Приемоиндикаторы 17, 18 спутниковых навигационных систем представлют собой четырехканальные приемоиндикаторы спутниковых навигационных систем, антенны которых установлены соответственно в носовой и кормовой частях судна и содержат навигационный фильтр для моделирования движения носовой и кормовой частей судна.
Штатный навигационный режим при использовании информации от приемоиндикаторов СНС предполагает использование измерительной информации только от СНС. Из кодовых измерений (псевдодальностей) обычно формируют оценки координат объекта с автоматическим исключением систематической ошибки измерений (расхождение системной шкалы времени и шкалы приемоиндикаторов). Данная ошибка является проявлением специфики беззапросного метода спутниковой навигации (псевдодальномерный метод) и исключается оцениванием ее в расширенном векторе координат.
Известно, что при одномоментных измерениях составляющие скорости определяются только по доплеровским измерениям. В то же время для орбит навигационных спутников системы ГЛОНАСС можно считать, что доплеровские измерения слабо откликаются на изменения координат, вследствие чего координаты определяются практически только по квазидальномерным измерениям. Следовательно, без потери точности обработку дальномерно-доплеровских измерений можно производить в два этапа. На первом этапе по результатам квазидоплеровских (разностно-доплеровских) измерений оценивают составляющие скорости движения судна в точках установки антенн. На первом этапе могут быть использованы дальномерный, разностно-дальномерный и квазидальномерный алгоритмы (Бортовые устройства спутниковой радионавигации / Н.В.Кудрявцев, И.И.Мищенко, А.И.Волынкин и др. - М.: Транспорт, 1988 - 201 с.).
На втором измеряют псевдодальности до четырех ИСЗ. При этом измеренные псевдодальности можно отнести к единому моменту времени, поэтому однократная засечка четырех псевдодальностей позволяет зафиксировать мгновенное пространственное положение точек судна в месте расположения антенн. Точность определения мгновенных координат не зависит от динамики судна, тем не менее уточнение этих координат за счет сглаживания быстро флуктуирующих погрешностей измерений может быть осуществлено только при наличии информации о характере траектории судна, позволяющей осуществить счисление его координат в промежутках между измерениями псевдодальностей. Знание траектории движения судна (его динамики) необходимо для выработки текущих значений таких важных навигационных параметров, как составляющие вектора его скорости, в конкретной реализации предлагаемого технического решения такая информация может быть получена с помощью математической модели, описывающей динамику судна. Для этого в приемнике применен навигационный фильтр для моделирования движения волномерного буя. В качестве такого фильтра использован дискретный фильтр Калмана (Зайцев А.В., Резниченко В.И. Определение путевой скорости корабля по сигналам среднеорбитной космической навигационной системы // Записки по гидрографии. - 1982 - №208а. - с.62-64), который построен на основе следующих моделей динамики судна и измерений:


где Xk - вектор состояния;
Φk - матрица перехода;
Hk - матрица частных производных измерений;
Zk - вектор измерений;
Wk - вектор возмущений (шумов) динамики судна;
Uk - вектор шумов измерений.
Движение судна моделируется динамической системой, возбуждаемой шумами. Переменные дифференциальных уравнений, описывающих эту систему, образуют вектор состояния Xk. Кроме этих переменных, в фильтре моделируются некоторые «мешающие» параметры - систематические погрешности измерений псевдодальности и псевдоскорости, которые также включаются в вектор состояния.
В вектор измерений Z, помимо псевдодальностей, включается дельтапсевдодальности, которые, по существу, представляют собой результаты интегрирования доплеровского смещения частоты на конечном интервале Δt=ti+1-ti. Если просуммировать на интервале tn-t0 дельтапсевдодальности, полученные интегрированием доплеровской частоты с погрешностью εi в последовательные моменты времени ti получим приращение дальности на интервале с погрешностью 
Дисперсия этой суммы:

Погрешности соседних измерений доплеровских интегралов коррелированы с коэффициентом - 0,5:
 .
.
Тогда
 .
.
Таким образом, среднеквадратическая погрешность приращения дальности доплеровским методом не зависит от длительности интервала интегрирования и от разбиения этого интервала на части. Последнее обстоятельство позволяет при непрерывных измерениях дельтапсевдодальностей до четырех спутников, исключив систематическую погрешность эталона частоты приемного устройства приемоиндикатора СНС, построить траекторию движения судна независимо от его динамики.
Авторулевой 19. Аналогом авторулевого 19 является авторулевой судна, приведенный в описании к патенту RU №2410282 C1, 27.01.2011.
Индикатор 20 представляет собой многофункциональный дисплей морского исполнения с диапазонами входов RGB, цифровые видеоинтерфейсы DVI-D, 3NTSC/PAL и т.п. Возможно также подключение выносных функциональных индикаторов.
Устройство работает следующим образом.
Датчики автономной навигационной информации вырабатывают сигналы, несущие информацию о скорости судна, угле дрейфа, составляющих вектора скорости, пройденном расстоянии, путевом угле, курсе, углах качки, линейных и угловых скоростей и ускорений, координатах, дистанции и пеленге до навигационных ориентиров и опасностей, глубине под килем, траекторию движения судна. Эти сигналы поступают через магистраль обмена информацией 1 на вычислитель 3, где выполняется решение основной навигационной задачи по определению места судна в зависимости от условий плавания и степени достоверности, выработанной этими датчиками, а также выполняются вычисления для обеспечения стабилизации движения судна на заданном курсе и линии заданного пути.
С вычислителя 3 сигналы поступают на навигационный пульт управления 2 и шину данных 10 через магистраль обмена информацией 1, и на электронную картографическую навигационную систему 4, где отображается исходный и модифицированный маршруты. На электронную картографическую навигационную систему 4 поступает также информация с эхолота и РЛС.
Посредством неавтономного навигационного датчика, принимающего сигналы, излучаемые береговыми и космическими навигационными системами, и представляющего собой совмещенный приемоиндикатор 8 радионавигационных и космических навигационных систем, определяют обсервованные координаты, вектор путевой скорости и курс путем приема и обработки сигналов в диапазоне частот 10-14 кГц, 70-130 кГц, 399,968 МГц, 1227,6-1575,42 МГц, 149,988 МГц, 1,6-5 МГц, а также восстанавливают траекторию движения судна. В зоне действия береговых дифференциальных станций прием сигналов осуществляется от этих станций, что позволяет определять обсервованные координаты с точностью до 10 м при благоприятных геометрических параметрах нахождения высокоскоростного судна относительно береговых станций.
Предлагаемое устройство благодаря вводу новых элементов, с образованием новых информационных связей, использованием алгоритмов управления судна на маршруте и алгоритмов обработки навигационной информации, имеющей малопересекающиеся области энергетических спектров, обеспечивает оптимальное управление судном, так как применение предлагаемого устройства позволяет повысить точность определения основных навигационных параметров, степень автоматизации управления судном с одновременным повышением информативности и надежности.
Предлагаемое устройство построено на основе использования штатных навигационных средств и средств управления движением, что позволяет сделать вывод о соответствии заявляемого изобретения условию патентоспособности «промышленная применимость".
Источники информации
1. Патент RU №2072547.
2. Патент RU №2068570.
3. Патент RU №2079836.
4. Патент RU №2079859.
5. Патент RU №2071034.
6. Патент GB №1166976.
7. Патент US №5711239.
8. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991, с.6-8.
9. Патент JP №9142373 А, 03.06.1997.
10. Патент US 5237952 A, 24.08.1993.
11. Пирогов Н.Н., Чернявец В.В. Навигационный комплекс для катеров на подводных крыльях / Зарубежное военное обозрение, №4, 1986, с.58-59.
12. Сазонов А.Е., Родионов А.И. Автоматизация судовождения. - М.: Транспорт, 1977, с.185-196.
13. Патент RU №64588 U1, 10.07.2007.
14. Патент RU №65016 U1, 27.07.2007.
15. Патент RU №2260191, 10.09.2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2012 |
|
RU2489731C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ВЫСОКОСКОРОСТНЫХ СУДОВ | 2004 |
|
RU2260191C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| КОРАБЛЬ ГИДРОГРАФИЧЕСКОЙ И ПАТРУЛЬНОЙ СЛУЖБЫ | 2010 |
|
RU2459738C2 |
| АВТОРУЛЕВОЙ СУДНА | 2011 |
|
RU2465170C1 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОЙ СКОРОСТИ СУДНА ПО ИЗМЕРЕНИЯМ ДЛИНЫ ПРОБЕГА СУДНА НА ГАЛСЕ ПО ФИКСИРОВАННОМУ СОЗВЕЗДИЮ КОСМИЧЕСКИХ АППАРАТОВ СРЕДНЕОРБИТНОЙ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 2013 |
|
RU2550299C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОПРАВОК К ГЛУБИНАМ, ИЗМЕРЕННЫМ ЭХОЛОТОМ ПРИ СЪЕМКЕ РЕЛЬЕФА ДНА АКВАТОРИИ | 2013 |
|
RU2529626C2 |
Изобретение относится к области навигационного приборостроения и может найти применение в системах автоматической навигации высокоскоростных судов. Технический результат - расширение функциональных возможностей. Для достижения данного результата введены автоматическая идентификационная система сопровождения целей, соединенная своим входом-выходом с навигационным пультом управления, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием, соединенный своим входом-выходом с навигационным пультом управления, еще два четырехканальных приемоиндикатора спутниковых навигационных систем, антенны которых установлены соответственно в носовой и кормовой частях судна, соединенные с магистралью обмена информацией, а инерциальная навигационная система еще также соединена своим входом с выходом приемоиндикатора радионавигационных и спутниковых навигационных систем, приемоиндикатор радионавигационных и спутниковых навигационных систем содержит четыре дополнительных канала для измерения дельтапсевдодальностей до четырех искусственных спутников Земли и навигационный фильтр для моделирования движения судна. 8 з.п. ф-лы, 1 ил.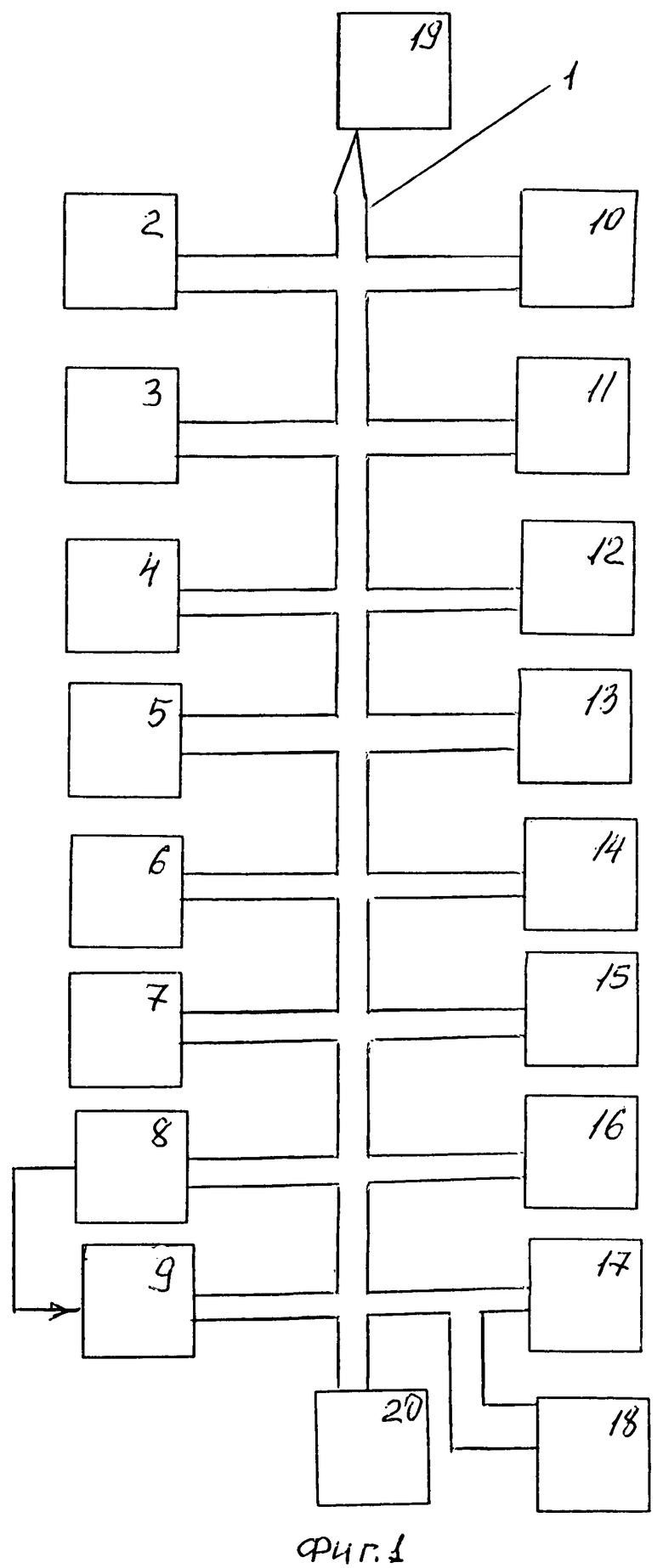
1. Навигационный комплекс, состоящий из приемоиндикатора радионавигационных и спутниковых навигационных систем, измерителей скорости, курса и линейных ускорений и угловых скоростей, автопрокладчика, вычислителя, навигационного пульта управления, эхолота, индикатора, радиолокационной станции, авторулевого, электронной картографической навигационной системы, блока сопряжения с рулевым приводом, блока ситуационного анализа, функционально соединенные посредством магистрали обмена информацией, измеритель скорости выполнен в виде совмещенной системы измерения скорости и параметров волнения, при этом измерители курса и линейных ускорений и угловых скоростей образуют инерциальную навигационную систему, отличающийся тем, что дополнительно введены автоматическая идентификационная система сопровождения целей, соединенная своим входом-выходом с навигационным пультом управления, гидролокатор шагового поиска с горизонтальным и вертикальным сканированием, соединенный своим входом-выходом с навигационным пультом управления, еще два четырехканальных приемоиндикаторов спутниковых навигационных систем, антенны которых установлены соответственно в носовой и кормой частях судна, соединенные с магистралью обмена информацией, а инерциальная навигационная система еще также соединена своим входом с выходом приемоиндикатора радионавигационных и спутниковых навигационных систем, приемоиндикатор радионавигационных и спутниковых навигационных систем содержит четыре дополнительных канала для измерения дельтапсевдодальностей до четырех искусственных спутников Земли и навигационный фильтр для моделирования движения судна.
2. Навигационный комплекс по п.1, содержащий индикатор, отличающийся тем, что индикатор выполнен в виде многофункционального дисплея.
3. Навигационный комплекс по п.1, содержащий автопрокладчик, отличающийся тем, что автопрокладчик выполнен с возможностью формирования 3D-изображения с постоянным трехмерным представлением данных и загрузкой растровыми и векторными картами и векторной картографией.
4. Навигационный комплекс по п.1, содержащий эхолот, отличающийся тем, что эхолот выполнен с двухчастотным излучением 50/200 кГц с функцией различения эхосигналов.
5. Навигационный комплекс по п.1, содержащий инерциальную навигационную систему, отличающийся тем, что инерциальная навигационная система состоит из бесплатформенного инерциального измерительного модуля на волоконно-оптических гироскопах, микроакселерометров и микровычислителя.
6. Навигационный комплекс по п.1, содержащий еще два приемоиндикатора спутниковых навигационных систем, антенны которых установлены в носовой и кормовой частях судна, отличающийся тем, что каждый из этих приемоиндикаторов содержит четыре канала приема спутниковых сигналов для измерения дельтапсевдодальностей до четырех искусственных спутников Земли.
7. Навигационный комплекс по п.1 или 6, содержащий еще два приемоиндикатора спутниковых навигационных систем, антенны которых установлены в носовой и кормовой частях судна, отличающийся тем, что каждый из приемоиндикаторов содержит навигационный фильтр для моделирования движения судна.
8. Навигационный комплекс по п.1, содержащий электронную картографическую навигационную систему, отличающийся тем, что электронная картографическая навигационная система содержит набор растровых и векторных карт, и спутниковые фотографии.
9. Навигационный комплекс по п.1 или 2, содержащий индикатор, отличающийся тем, что индикатор выполнен с возможностью отображения цветовых оттенков по глубинам, углам качки и элементов движения целей.
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 1992 |
|
RU2072547C1 |
| АВТОРУЛЕВОЙ СУДНА | 2009 |
|
RU2410282C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
| ПИРОГОВ H.Н., ЧЕРНЯВЕЦ В.В | |||
| Навигационный комплекс для катеров на подводных крыльях // Зарубежное военное обозрение, №4, 1986, с.58-59 | |||
| САЗОНОВ А.Е., РОДИОНОВ А.И | |||
| Автоматизация судовождения | |||
| - М.: Транспорт, 1977, с.185-196 | |||
| US 5711239 A1, 27.01.1998 | |||
| US 5237952 A1, 24.08.1993. | |||

