ПРАВА ПРАВИТЕЛЬСТВА НА ЛИЦЕНЗИЮ
[001] Настоящее изобретение, описанное в настоящей заявке, было создано при выполнении работ по контракту Национального агентства по аэронавтике и исследованию космического пространства (NASA) №NAS8-01099 и соответствует статьям Части 305 Национального закона США об аэронавтике и исследованию космического пространства (раздел 72 закона 435: параграф 2457 титула 42 Свода законов США (U.S.С). Национальное агентство по аэронавтике и исследованию космического пространства имеет определенные права на данную патентную заявку.
ОБЛАСТЬ ТЕХНИКИ
[002] Настоящее изобретение в целом относится к космическому летательному аппарату, а в частности к соединительным системам космического летательного аппарата. Еще конкретнее, настоящее изобретение относится к способу и устройству для стыковочной системы космического летательного аппарата.
УРОВЕНЬ ТЕХНИКИ
[003] Соединительные системы космического летательного аппарата обеспечивают способ механического соединения двух или более космических летательных аппаратов друг с другом. Космический летательный аппарат, как использовано в настоящей заявке, представляет собой транспортное средство, судно или машину, предназначенную для осуществления множества операций в космосе. Космический летательный аппарат может представлять собой самоходные транспортные средства, предназначенные для совершения краткосрочных космических полетов, или может быть выполнен с возможностью пребывания в космосе в течение длительного периода времени. В других случаях космический летательный аппарат может представлять собой космическую станцию, спутник или какую-либо другую подходящую конструкцию.
[004] Соединение двух космических летательных аппаратов может быть необходимо для передачи ресурсов от одного космического летательного аппарата на другой космический летательный аппарат. Например, космический корабль может состыковываться с космической станцией для доставки на нее экипажа и ресурсов. В других примерах космический корабль может состыковываться со спутником для осуществления технического обслуживания и ремонта одного или более компонентов этого спутника.
[005] В данном иллюстративном примере пара соединяемых космических летательных аппаратов содержит активное транспортное средство и целевую конструкцию. Активное транспортное средство представляет собой космический летательный аппарат, который сближается с целевой конструкцией. Например, активное транспортное средство может представлять собой космический летательный аппарат, а целевая конструкция может представлять собой космическую станцию. Космический летательный аппарат сближается с космической станцией для соединения с ней. Соединение двух космических летательных аппаратов может называться стыковкой или швартовкой.
[006] При осуществлении стыковки активное транспортное средство маневрирует под действием своей собственной тяги для размещения двух половин соединительной системы, а именно одной половины, находящейся на действующем транспортном средстве, и еще одной половины, находящейся на целевой конструкции, в необходимой близости по отношению друг к другу. После удовлетворения этого требования, стыковочную систему в дальнейшем используют для соединения космического летательного аппарата с другими космическими летательными аппаратами. Стыковочная система выполнена таким образом, что она допускает первоначальные углы несоосности между транспортными средствами со стыковочной системой, что обеспечивает возможность бесшумного захвата, выравнивания и жесткого соединения активного транспортного средства и целевой конструкции. В некоторых случаях активное транспортное средство замедляется или останавливает своей перемещение по направлению к целевой конструкции и выдвигает стыковочную систему по направлению наружу для согласования и выравнивания с целевой конструкцией.
[007] С другой стороны, швартовка возникает тогда, когда прикрепленное снаружи устройство, связанное с одним из космических летательных аппаратов, используют для размещения активного транспортного средства в необходимой близости по отношению к целевой конструкции. В некоторых случаях это устройство представляет собой роботизированную руку, которая прикрепляет один из космических летательных аппаратов к другому космическому летательному аппарату и направляет конструкции друг к другу при подготовке к соединению.
[008] При использовании соединительных систем космического летательного аппарата контроллеры выполнены с возможностью сочленения соединительной системы для того, чтобы активная половина соединительной системы успешно захватила целевую конструкцию, осуществила выравнивание двух половин и подготовила эти две половины к образованию жесткого соединения. Однако эти контроллеры соединительных систем космического летательного аппарата могут быть выполнены и более сложными, чем это необходимо. Например, для обеспечения необходимого взаимодействия активного транспортного средства и целевой конструкции могут быть необходимы алгоритмы комбинированного управления. Эти системы также могут иметь вес, превышающий необходимый вес космического летательного аппарата.
[009] Кроме того, по мере увеличения сложности системы управления связью космического летательного аппарата, увеличивается вероятность отказа системы связи вследствие увеличивающегося количества возможных случаев отказа на уровне подсистем и компонентов. Таким образом, необходимо создать способ и устройство, которые решают по меньшей мере некоторые из вышеописанных проблем, а также и другие возможные проблемы.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[0010] В одном из иллюстративных вариантов реализации устройство содержит удлиненные элементы, перемещающие системы и системы управления усилиями. Удлиненные элементы связаны со стыковочной системой космического летательного аппарата. Перемещающие системы выполнены с возможностью перемещения удлиненных элементов в осевом направлении таким образом, что происходит перемещение стыковочной системы космического летательного аппарата. Каждый из удлиненных элементов совершает независимое перемещение. Системы управления усилиями соединяют перемещающие системы с удлиненными элементами и выполнены с возможностью ограничения усилия, прикладываемого каждым из удлиненных элементов, необходимым пороговым значением во время перемещения удлиненных элементов.
[0011] Еще в одном иллюстративном варианте реализации предложен способ стыкования космического летательного аппарата. Удлиненные элементы перемещают в осевом направлении таким образом, что происходит перемещение стыковочной конструкции космического летательного аппарата. Каждый из удлиненных элементов совершает независимое перемещение. Во время перемещения удлиненных элементов усилие, прикладываемое каждым из удлиненных элементов, ограничивают необходимым пороговым значением.
[0012] Еще в одном иллюстративном варианте реализации стыковочная система космического летательного аппарата содержит захватное кольцо, удлиненные элементы, связанные с захватным кольцом, выравнивающие элементы, двигатели и системы управления усилиями, соединяющие двигатели с удлиненными элементами. Выравнивающие элементы расположены вдоль поверхности сопряжения захватного кольца и выполнены с возможностью выравнивания захватного кольца со второй конструкцией. Двигатели выполнены с возможностью перемещения удлиненных элементов в осевом направлении таким образом, что захватное кольцо космического летательного аппарата совершает перемещение с множеством степеней свободы. Каждый из удлиненных элементов совершает независимое перемещение. Системы управления усилиями выполнены с возможностью ограничения усилия, прикладываемого каждым из удлиненных элементов, необходимым пороговым значением во время перемещения удлиненных элементов.
[0013] Признаки и функции могут быть реализованы независимо друг от друга или могут быть объединены еще в одних вариантах реализации, дополнительные сведения о которых можно увидеть по ссылке на приведенные далее описание и чертежи.
[0014] Кроме того, настоящее изобретение содержит варианты реализации согласно следующим пунктам:
Пункт 1. Стыковочная система космического летательного аппарата, содержащая:
захватное кольцо,
удлиненные элементы, связанные с захватным кольцом,
выравнивающие элементы, расположенные вдоль поверхности сопряжения захватного кольца и выполненные с возможностью выравнивания захватного кольца со второй конструкцией,
двигатели, выполненные с возможностью перемещения удлиненных элементов в осевом направлении таким образом, что захватное кольцо космического летательного аппарата совершает перемещение с множеством степеней свободы, причем каждый из удлиненных элементов совершает независимое перемещение, и
системы управления усилиями, соединяющие двигатели с удлиненными элементами и выполненные с возможностью ограничения усилия, прикладываемого каждым из удлиненных элементов, необходимым пороговым значением во время перемещения удлиненных элементов.
Пункт 2. Стыковочная система по пункту 1, в которой системы управления усилиями пассивно ограничивают усилие, прикладываемое каждым из удлиненных элементов при приложении нагрузки второй конструкцией, причем когда усилие достигает необходимое пороговое значение система управления усилиями выполнена с возможностью скользящего перемещения таким образом, что соответствующий удлиненный элемент совершает перемещение из первого положения во второе положение.
Пункт 3. Стыковочная система по пункту 1, в которой двигатели выполнены с возможностью работы в состоянии, выбранном как по меньшей мере одно из следующего: выдвижение, ослабление и втягивание.
Пункт 4. Стыковочная система по пункту 1, в которой усилие, прикладываемое удлиненными элементами, ограничено на основании положения захватного кольца относительно второй конструкции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0015] В прилагаемой формуле изобретения заданы новые признаки, считаемые характеристиками иллюстративных вариантов реализации. Однако иллюстративные варианты реализации, а также предпочтительный способ использования и их дополнительные задачи и признаки будут наилучшим образом понятны по ссылке на приведенный далее раздел «Осуществление изобретения» при прочтении с использованием прилагаемых чертежей.
[0016] На фиг. 1 показана среда стыковки космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
[0017] На фиг. 2 показана структурная схема среды стыковки космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
[0018] На фиг. 3 показана структурная схема стыковочной системы космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
[0019] На фиг. 4 показана диаграмма состояний, иллюстрирующая изменения между состояниями работы перемещающей системы в соответствии с иллюстративным вариантом реализации.
[0020] На фиг. 5 показана стыковочная система космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
[0021] На фиг. 6 показан приводный узел в соответствии с иллюстративным вариантом реализации.
[0022] На фиг. 7 показана стыковочная система, взаимодействующая со второй конструкцией, в соответствии с иллюстративным вариантом реализации.
[0023] На фиг. 8 показано еще одно изображение стыковочной системы, выровненной со второй конструкцией, в соответствии с иллюстративным вариантом реализации.
[0024] На фиг. 9 показано еще одно изображение стыковочной системы, выровненной со второй конструкцией, в соответствии с иллюстративным вариантом реализации.
[0025] На фиг. 10 показано еще одно изображение стыковочной системы, выровненной со второй конструкцией, в соответствии с иллюстративным вариантом реализации.
[0026] На фиг. 11 показано еще одно изображение стыковочной системы, выровненной со второй конструкцией, в соответствии с иллюстративным вариантом реализации.
[0027] На фиг. 12 показан график стыковочной системы при выдвижении в соответствии с иллюстративным вариантом реализации.
[0028] На фиг. 13 показан график стыковочной системы в режиме ослабления в соответствии с иллюстративным вариантом реализации.
[0029] На фиг. 14 показана блок-схема процесса стыкования космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
[0030] На фиг. 15 показано еще одна блок-схема процесса стыкования космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
[0031] На фиг. 16 показана еще одна блок-схема процесса стыкования космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
[0032] На фиг. 17 показана блок-схема способа изготовления и обслуживания космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
[0033] На фиг. 18 показана структурная схема космического летательного аппарата в соответствии с иллюстративным вариантом реализации.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0034] Иллюстративные варианты реализации показывают и учитывают одну или более различных идей. Например, иллюстративные варианты реализации показывают и учитывают необходимость в уменьшении сложности стыковочной системы космического летательного аппарата. Например, применяемые в настоящее время стыковочные системы космического летательного аппарата используют системы датчиков нагрузки, сложные законы управления и программные приложения для соединения одного космического летательного аппарата с другим космическим летательным аппаратом. Эти системы имеют недостатки и могут не работать необходимым образом.
[0035] Иллюстративные варианты реализации также показывают и учитывают необходимость в уменьшении веса космического летательного аппарата. Например, уменьшение веса космического летательного аппарата обеспечивает возможность космическому летательному аппарату иметь расширенный выбор ракет-носителей, или этот космический летательный аппарат может взамен выдерживать большую нагрузку. Уменьшение веса космического летательного аппарата также может быть необходимо для выполнения операций в космосе. Более большой или более тяжелый космический летательный аппарат может и не маневрировать настолько легко, насколько это необходимо.
[0036] Однако иллюстративные варианты реализации показывают и учитывают то, что использование стыковочных систем со сложными контроллерами может включать возросшее количество аппаратных средств для обеспечения операций контроллера. Это возросшее количество аппаратных средств может добавить больше веса к космическому летательному аппарату, чем это необходимо.
[0037] Таким образом, в иллюстративных вариантах реализации предложены способ и устройство для стыкования космического летательного аппарата. В иллюстративных вариантах реализации предложены упрощенный способ и стыковочная система, которая легче используемых в настоящее время стыковочных систем космического летательного аппарата.
[0038] В одном из иллюстративных примеров устройство содержит удлиненные элементы, перемещающие системы и системы управления усилиями, соединяющие перемещающие системы с удлиненными элементами. Удлиненные элементы связаны со стыковочной системой космического летательного аппарата. Перемещающие системы выполнены с возможностью перемещения удлиненных элементов в осевом направлении таким образом, что происходит перемещение стыковочной системы космического летательного аппарата. Каждый из удлиненных элементов совершает перемещение независимо от других удлиненных элементов. Системы управления усилиями выполнены с возможностью ограничения усилия, прикладываемого каждым из удлиненных элементов, необходимым пороговым значением во время перемещения удлиненных элементов.
[0039] На фигурах, в частности на фиг. 1, показана среда стыковки космического летательного аппарата в соответствии с иллюстративным вариантом реализации. В данном иллюстративном примере среда 100 стыковки содержит космический летательный аппарат 102 и конструкцию 104. В данном иллюстративном примере космический летательный аппарат 102 выполнен с возможностью его соединения с конструкцией 104.
[0040] Как показано, космический летательный аппарат 102 имеет различные формы. Например, без ограничения, космический летательный аппарат 102 может быть выбран как одно из следующего: космическое транспортное средство, космический корабль, спутник, космическая станция или космический летательный аппарат какого-либо иного подходящего типа. Конструкция 104 также может иметь форму космического транспортного средства, космического корабля, космической станции, спутника или конструкции какого-либо иного подходящего типа. Еще в одних иллюстративных примерах конструкция 104 также может представлять собой стационарную конструкцию. В данном иллюстративном примере космический летательный аппарат 102 имеет форму космического корабля 106, а конструкция 104 имеет форму космической станции 107.
[0041] В данном показанном примере стыковочная система 108 связана с космическим летательным аппаратом 102. Как использовано в настоящей заявке, когда в показанных примерах один компонент «связан» с другим компонентом, эта связь представляет собой физическое соединение.
[0042] Например, можно считать, что первый компонент, такой как стыковочная система 108, может быть связан со вторым компонентом, таким как космический летательный аппарат 102, путем его скрепления со вторым компонентом, соединения со вторым компонентом посредством связующего, закрепления на втором компоненте, соединения сваркой со вторым компонентом, привинчивания ко второму компоненту и/или соединения со вторым компонентом другим подходящим образом. Первый компонент также может быть соединен со вторым компонентом с использованием третьего компонента. Кроме того, можно считать, что первый компонент связан со вторым компонентом за счет того, что он образован в качестве части второго компонента и/или продолжения второго компонента.
[0043] Стыковочная система 108 образует механический узел, выполненный с возможностью соединения двух конструкций вместе. В частности, стыковочная система 108 выполнена с возможностью соединения первой конструкции, а именно космического корабля 106, и второй конструкции, а именно космической станции 107.
[0044] В данном иллюстративном примере стыковочная система 108 выполнена с возможностью выдвижения из космического корабля 106 и с возможностью взаимодействия с космической станцией 107. Это взаимодействие может быть названо как захват. В данном иллюстративном примере захват представляет собой процесс, используемый для первоначального соединения космического корабля 106 с космической станцией 107.
[0045] После завершения захвата между космическим кораблем 106 и космической станцией 107, на стыковочную систему 108 выдают команду выровнять космическую станцию 107 и космический корабль 106 с последующим втягиванием активного кольца стыковочной системы 108 в необходимое положение, которое сохраняет окончательное жесткое соединение стыковочной системы 108 со стыковочным кольцом в космической станции 107 для выполнения процесса стыковки. В данном иллюстративном примере стыковочная система 108 показана в части 110.
[0046] На фиг. 2 показана структурная схема среды стыковки космического летательного аппарата в соответствии с иллюстративным вариантом реализации. Среда 100 стыковки, показанная на фиг. 1, представляет собой пример одной из реализаций среды 200 стыковки, показанной на данной фигуре в блочной форме.
[0047] Как показано, среда 200 стыковки содержит космический летательный аппарат 202 и конструкцию 204. Космический летательный аппарат 102 и конструкция 104, показанные на фиг. 1, представляют собой примеры реализации космического летательного аппарата 202 и конструкции 204, показанных на данной фигуре в виде соответствующих блоков.
[0048] В данном иллюстративном примере космический летательный аппарат 202 может иметь множество различных форм. Например, космический летательный аппарат 202 может иметь форму космического транспортного средства, космического корабля, спутника, космической станции или конструкции какого-либо иного подходящего типа. В данном показанном примере космический летательный аппарат 202 представляет собой активное транспортное средство. Другими словами, космический летательный аппарат 202 перемещается каким-либо образом в космосе. В данном иллюстративном примере космический летательный аппарат 202 может совершать перемещение относительно конструкции 204.
[0049] Как показано, космический летательный аппарат 202 оборудован движительной системой 206, системой 208 посадки и стыковочной системой 210. Движительная система 206 выполнена с возможностью ускорения космического летательного аппарата 202. Движительная система 206 может содержать по меньшей мере одно из следующего: ракетные двигатели, электромагнитные движительные элементы и механизмы других подходящих типов, выполненные с возможностью перемещения космического летательного аппарата 202.
[0050] Как использовано в настоящей заявке, фраза «по меньшей мере один из» при использовании с перечнем объектов означает, что могут быть использованы различные комбинации из одного или большего количества перечисленных объектов, и только один из объектов в перечне может быть необходим. Объект может представлять собой конкретный предмет, вещь или категорию. Другими словами, выражение «по меньшей мере одно из» означает, что из перечня может быть использована любая комбинация объектов или множество объектов, но не все из этих объектов в перечне могут быть необходимы.
[0051] Например, выражение «по меньшей мере один из объекта А, объекта В и объекта С» может означать объект А, объект А и объект В, объект В, объект А, объект В и объект С или объект В и объект С. В некоторых случаях фраза «по меньшей мере один из объекта А, объекта В и объекта С» может означать, например, без ограничения, два объекта А, один объект В и десять объектов С, четыре объекта В и сеть объектов С или какую-либо иную подходящую комбинацию.
[0052] В данном иллюстративном примере система 208 посадки выполнена с возможностью содействия космическому летательному аппарату 202 во время приземления на необходимую поверхность. Например, система 208 посадки может быть выполнена с возможностью содействия космическому летательному аппарату 202 в посадке на Луну. В других примерах система 208 посадки содержит компоненты, выполненные с возможностью защиты космического летательного аппарата 202, поскольку он повторно входит в атмосферу Земли. Система 208 посадки содержит различные компоненты, такие как надувные подушки безопасности, парашюты, посадочное шасси и компоненты других подходящих типов.
[0053] Стыковочная система 210 выполнена с возможностью соединения космического летательного аппарата 202 с конструкцией 204. В частности, стыковочная система 210 выполнена с возможностью соединения стыковочной конструкции 212 космического летательного аппарата 202 с конструкцией 204. Другими словами, стыковочная конструкция 212 соединяет космический летательный аппарат 202 с конструкцией 204. Стыковочная система 108, показанная на фиг. 1, представляет собой пример одной из реализаций стыковочной системы 210, показанной на данной фигуре в блочной форме.
[0054] В данном иллюстративном примере стыковочная конструкция 212 может иметь множество различных форм. Например, без ограничения, стыковочная конструкция 212 может быть выбрана как одно из следующего: захватывающее кольцо, стыковочное основание, стрежни и конструкции других подходящих видов.
[0055] В данном показанном примере стыковочная конструкция 212 представляет собой захватное кольцо 216. В данном иллюстративном примере захватное кольцо 216 представляет собой круглый конструктивный компонент. Захватное кольцо 216 может быть выполнено из различных типов материалов, таких как, например, без ограничения, металл, сплав металлов или материал какого-либо иного подходящего типа, который обеспечивает необходимый уровень жесткости.
[0056] Как показано, в данном иллюстративном примере захватное кольцо 216 представляет собой активное кольцо. Другими словами, захватное кольцо 216 выполнено с возможностью его перемещения относительно конструкции 204. Например, стыковочная система 210 перемещает захватное кольцо 216 по направлению к конструкции 204 таким образом, что захватное кольцо 216 взаимодействует с конструкцией 204 необходимым образом.
[0057] Как показано, конструкция 204 также может иметь множество различных форм. Например, конструкция 204 может быть выбрана как одно из следующего: стыковочное кольцо, космическая станция, спутник и космический летательный аппарат. В данном показанном примере конструкция 204 представляет собой космическую станцию 214.
[0058] Космическая станция 214 представляет собой космический летательный аппарат, выполненный с возможностью пребывания в космосе в течение продолжительного периода времени. В данном иллюстративном примере космическая станция 214 может и не содержать движительные системы и системы посадки.
[0059] Космическая станция 214 содержит пассивное стыковочное кольцо 218. Аналогично захватному кольцу 216, стыковочное кольцо 218 представляет собой круглый конструктивный компонент. В данном иллюстративном примере стыковочное кольцо 218 представляет собой пассивную конструкцию. Другими словами, стыковочное кольцо 218 остается стационарным и не совершает перемещения во время стыковки космического летательного аппарата 202 с конструкцией 204.
[0060] Как показано, захватное кольцо 216 в космическом летательном аппарате 202 выполнено с возможностью соединения со стыковочным кольцом 218 в космической станции 214 для стыкования космического летательного аппарата 202. Стыковка может быть осуществлена для обмена ресурсами между космическим летательным аппаратом 202 и космической станцией 214. Захватное кольцо 216 и стыковочное кольцо 218 представляют собой кольца с идентичными размерами и формами.
[0061] Во время стыковки движительная система 206 обеспечивает движение космического летательного аппарата 202 по направлению к космической станции 214 для обеспечения стыкования. Поскольку космический летательный аппарат 202 приближается к космической станции 214, движительная система 206 замедляется или останавливается. Стыковочная система 210 с захватным кольцом 216 в дальнейшем выдвигается из космического летательного аппарата 202 и выравнивается со стыковочным кольцом 218 в космической станции 214. Захватное кольцо 216 оказывается выровненным со стыковочным кольцом 218, когда поверхность сопряжения захватного кольца 216 расположена в пределах необходимого расстояния и с необходимой ориентацией относительно стыковочного кольца 218.
[0062] Когда захватное кольцо 216 находится в пределах необходимого расстояния 215 стыковочного кольца 218 и имеет необходимое выравнивание 217, стыковочное кольцо 218 и захватное кольцо 216 могут быть скреплены друг с другом для стыкования космического летательного аппарата 202 в космической станции 214. Необходимое расстояние 215 выбирают таким образом, что крепежная система может быть приведена в действие для прикрепления стыковочного кольца 218 к захватному кольцу 216. Необходимое выравнивание 217 выбирают таким образом, что стыковочное кольцо 218 и захватное кольцо 216 имеют выравнивание, которое предотвращает свободное перемещение между стыковочным кольцом 218 и захватным кольцом 216, когда крепежная система приведена в действие.
[0063] На фиг. 3 показана структурная схема стыковочной системы космического летательного аппарата в соответствии с иллюстративным вариантом реализации. На данной фигуре показаны примеры компонентов, которые могут быть использованы для реализации стыковочной системы 210, показанной на фиг. 2.
[0064] В дополнении к стыковочной конструкции 212, стыковочная система 210 содержит удлиненные элементы 300, перемещающие системы 302, системы 304 управления усилиями и крепежную систему 306. Как показано, удлиненные элементы 300 представляют собой конструкции, связанные со стыковочной системой 212.
[0065] Удлиненные элементы 300 могут иметь различные формы и могут быть выполнены из материалов различных типов. Например, удлиненные элементы 300 могут быть выбраны как по меньшей мере одно из следующего: приводные рычаги, стержни, крепления для шариковых винтов или удлиненные элементы других подходящих типов. Кроме того, удлиненные элементы 300 могут быть выполнены из одного или более материалов, выбранных из следующего: металл, сплав металлов, композит и материал какого-либо иного подходящего типа.
[0066] В данном иллюстративном примере удлиненные элементы 300 могут иметь несколько или множество различных форм. Например, удлиненные элементы могут быть выполнены цилиндрическими, шестиугольными, восьмиугольными или могут иметь какую-либо иную форму. В данном показанном примере удлиненные элементы 300 содержат удлиненный элемент 308.
[0067] Как показано, удлиненные элементы 300 выполнены с возможностью перемещения в осевом направлении таким образом, что происходит перемещение стыковочной системы 212. В данном иллюстративном примере осевое перемещение представляет собой перемещение вдоль оси, проходящей по центру через каждый из удлиненных элементов 300. Например, осевое перемещение удлиненного элемента 308 представляет собой перемещение вдоль оси 312, проходящей по центру через удлиненный элемент 308. Другими словами, удлиненный элемент 308 совершает перемещение в осевом направлении путем перемещения вдоль оси 312.
[0068] В данном иллюстративном примере удлиненный элемент 308 выдвигается и втягивается вдоль оси 312. Удлиненные элементы 300 могут выдвигаться и втягиваться в x-плоскости, y-плоскости и z-плоскости с использованием мест 307 соединения между удлиненными элементами 300 и стыковочной конструкцией 212. В одном из иллюстративных примеров удлиненные элементы 300 соединены с захватным кольцом 216 в платформе Стьюарта.
[0069] Как показано, удлиненные элементы 300 расположены вокруг захватного кольца 216 и соединены с нижней поверхностью захватного кольца 216 в местах 307 соединения. Захватное кольцо 216 перемещается по мере перемещения удлиненных элементов 300.
[0070] В данном иллюстративном примере места 307 соединения представляют собой универсальные шарниры. Места 307 соединения содержат механические соединения, которые прикрепляют стыковочную конструкцию 212 к удлиненным элементам 300 таким образом, что когда стыковочная конструкция 212 и удлиненные элементы 300 не расположены на одной линии друг с другом, все еще наблюдается свобода перемещения.
[0071] По мере перемещения удлиненных элементов 300 также происходит перемещение стыковочной конструкции 212. Соответственно, удлиненные элементы 300 и стыковочная система 210 выполнены с возможностью перемещения в x-направлении, y-направлении и z-направлении. В частности, удлиненные элементы 300 перемещают стыковочную конструкцию 212 с множеством степеней свободы 314. Фраза «множество» объектов, использованная в настоящей заявке, означает один или более объектов. В данном иллюстративном примере множество степеней свободы 314 представляет собой одну или более степеней свободы.
[0072] В данном иллюстративном примере множество степеней свободы 314 относится к возможности стыковочной конструкции 212 совершать перемещение в трехмерном пространстве. В данном иллюстративном примере стыковочная конструкция 212 совершает перемещение с шестью степенями свободы. Другими словами, стыковочная конструкция 212 выполнена с возможностью поступательного перемещения вдоль x-оси, y-оси и z-оси, а также с возможностью поворотного движения вокруг x-оси, y-оси и z-оси.
[0073] В данном показанном примере перемещающие системы 302 выполнены с возможностью перемещения удлиненных элементов 300 в осевом направлении таким образом, что стыковочная система 212 совершает перемещение с множеством степеней свободы 314. Перемещающие системы 302 содержат двигатели 316. В данном иллюстративном примере двигатели 316 приводят в действие по меньшей мере одним из следующего: электрический ток, давление гидравлической текучей среды, пневматическое давление или источник энергии какого-либо иного подходящего типа.
[0074] В данном показанном примере каждый двигатель из двигателей 316 соответствует другому удлиненному элементу из удлиненных элементов 300. Каждый двигатель из двигателей 316 перемещает один удлиненный элемент из удлиненных элементов 300. Например, двигатель 318 из двигателей 316 соответствует удлиненному элементу 308 из удлиненных элементов 300. Соответственно, двигатель 318 выполнен с возможностью перемещения удлиненного элемента 308 в осевом направлении.
[0075] По мере перемещения каждого удлиненного элемента из удлиненных элементов 300 происходит перемещение стыковочной конструкции 212. Например, стыковочная конструкция 212 может наклоняться, совершать поворот, совершать перемещение вдоль оси или их сочетание по мере перемещения одного или более удлиненных элементов 300.
[0076] В данном показанном примере каждый из удлиненных элементов 300 совершает перемещение независимо от другого с использованием двигателей 316. Каждый из размещенных независимым образом удлиненных элементов 300 может быть перемещен необходимым образом вне зависимости от перемещения других удлиненных элементов 300. В итоге, стыковочная конструкция 212 может перемещаться с множеством степеней свободы 314.
[0077] В данном иллюстративном примере перемещающие системы 302 выполнены с возможностью работы в состоянии 315, определенном конечным 313 автоматом. Состояние 315 представляет собой режим стыковочной системы 210, в котором эта стыковочная система 210 работает необходимым образом. Состояние 315 может быть выбрано как по меньшей мере одно из следующего: выдвижение, ослабление, втягивание или какое-либо иное подходящее состояние. Перемещающие системы 302 работают в другом состоянии 315 во время различных стадий стыковки.
[0078] Например, когда состояние 315 представляет собой выдвижение, двигатели 316 перемещают удлиненные элементы 300 и стыковочную конструкцию 212 по направлению к конструкции 204, показанной на фиг.2. Когда состояние 315 представляет собой втягивание, двигатели 316 перемещают удлиненные элементы 300 и стыковочную конструкцию 212 по направлению к космическому летательному аппарату 202 от конструкции 204. Состояние 315 стыковочной системы 210 более подробно описано на фиг.4.
[0079] Как показано, каждый из двигателей 316 выполнен с возможностью работы таким образом, что удлиненные элементы 300 имеют скорость перемещения 327. Скорость перемещения 327 представляет собой скорость, с которой двигатель перемещает свой соответствующий удлиненный элемент. В данном иллюстративном примере скорость перемещения 327 представляет собой заданную посредством команды скорость 328. Например, каждый из двигателей 316 выполнен с возможностью работы таким образом, что вращающий момент, создаваемый двигателями 316, преобразуют в осевое перемещение удлиненных элементов 300 с заданной посредством команды скоростью 328.
[0080] В данном иллюстративном примере заданная посредством команды скорость 328 представляет собой предварительно определенную скорость. Другими словами, заданная посредством команды скорость 328 не изменяется динамически на основании системы управления стыковочной системы 210. Двигатели 316 выдвигают удлиненные элементы 300 с заданной посредством команды скоростью 328, если только выдвижению не противодействует сопротивление.
[0081] В данном иллюстративном примере заданная посредством команды скорость 328 может представлять собой ту же самую скорость или различную скорость для каждого из удлиненных элементов 300. Например, на каждый из двигателей 316 может быть выдана команда выдвигать удлиненные элементы 300 со скоростью в один дюйм в секунду (2,54 см в секунду). Еще в одном иллюстративном примере на двигатели 316 может быть выдана команда выдвигать удлиненные элементы 300 с меньшей или большей скоростью, что зависит от конкретной реализации.
[0082] В данном иллюстративном примере двигатель 318 перемещает удлиненный элемент 308 с заданной посредством команды скоростью 328. Заданная посредством команды скорость 328 не изменяется на основании системы управления. Вместо этого двигатель 318 выполнен с возможностью уменьшения скорости перемещения 327 удлиненного элемента 308 на основании нагрузки 338, прикладываемой к удлиненному элементу 308 стыковочным кольцом 218, показанным на фиг. 2, по мере того, как захватное кольцо 216 контактирует со стыковочным кольцом 218. Таким образом, скорость перемещения 327 уменьшается по мере увеличения величины нагрузки 338.
[0083] Как показано, системы 304 управления усилиями соединяют перемещающие системы 302 с удлиненными элементами 300. Системы 304 управления усилиями представляют собой механические устройства, которые обеспечивают передачу энергии от одного компонента к другому компоненту. Энергия, передаваемая системами 304 управления усилиями, представляет собой вращающий момент, создаваемый двигателями 316.
[0084] Системы 304 управления усилиями могут иметь множество различных форм. Например, без ограничения, системы 304 управления усилиями могут быть выбраны как по меньшей мере одно из следующего: скользящая муфта сцепления, гидравлическая муфта сцепления, электромагнитная муфта сцепления, электромагнитный двигатель, программное обеспечение, электрический регулятор или устройства какого-либо иного подходящего типа, которые могут ограничивать передачу усилий.
[0085] Системы 304 управления усилиями соответствуют двигателям 316 и удлиненным элементам 300. Другими словами, одно из систем 304 управления усилиями, двигателей 316 и удлиненных элементов 300 образует функциональный компонент стыковочной системы 210. В данном показанном примере функциональный компонент стыковочной системы 210 представляет собой приводной узел 325. В данном иллюстративном примере приводной узел 325 может представлять собой линейный привод. Приводной узел 325 содержит удлиненный элемент 308, двигатель 318, систему 320 управления усилиями и другие компоненты (не показаны на данном виде).
[0086] В данном иллюстративном примере системы 304 управления усилиями передают энергию от перемещающих систем 302 на удлиненные элементы 300 для перемещения удлиненных элементов 300 необходимым образом. При передаче энергии от перемещающих систем 302 на удлиненные элементы 300, системы 304 управления усилиями ограничивают усилие 342, прикладываемое каждым из удлиненных элементов 300, необходимым пороговым значением 344 во время перемещения каждого из удлиненных элементов 300. Усилие 342 основано на вращающем моменте, выдаваемом каждым из двигателей 316. Усилие 342 оказывает противодействие нагрузке 338, прикладываемой стыковочным кольцом 218.
[0087] Как показано, необходимое пороговое значение 344 может представлять собой максимальное усилие для каждого из удлиненных элементов 300 для приложения ко стыковочному кольцу 218 космической станции 214, показанной на фиг. 2. В данном иллюстративном примере необходимое пороговое значение 344 представляет собой предварительно определенное значение. В иллюстративном примере необходимое пороговое значение 344 представляет собой усилие в десять фунтов (4,536 кг). В других иллюстративных примерах необходимое пороговое значение 344 может представлять собой усилие в один фунт (0,4536 кг), усилие в три фунта (1,3608 кг), усилие в двадцать фунтов (9,072 кг) или может иметь какое-либо иное подходящее значение.
[0088] В данном показанном примере системы 304 управления усилиями содержат систему 320 управления усилиями. Система 320 управления усилиями соединяет двигатель 318 удлиненным элементом 308 и передает энергию от двигателя 318 на удлиненный элемент 308 таким образом, что происходит перемещение этого удлиненного элемента 308. В данном иллюстративном примере система 320 управления усилиями ограничивает усилие 342, прикладываемое удлиненным элементом 308, необходимым пороговым значением 344.
[0089] Как показано, система 320 управления усилиями представляет собой скользящую муфту 322 сцепления. Скользящая муфта 322 сцепления представляет собой устройство, которое ограничивает передачу вращающего момента или «скользит», если оно достигает более высокого уровня вращающего момента по сравнению с уровнем вращающего момента, необходимым для обеспечения передачи. В данном иллюстративном примере скользящая муфта 322 сцепления представляет собой пассивное устройство. Другими словами, скользящая муфта 322 сцепления представляет собой механический компонент, который не изменяет свои характеристики в ответ на сигнал, отправленный системой управления.
[0090] В данном иллюстративном примере скользящая муфта 322 сцепления управляет усилием 342 путем управления вращающим моментом двигателя 318. Скользящая муфта 322 сцепления выполнена с возможностью скользящего перемещения, когда усилие 342 достигает необходимое пороговое значение 344, таким образом, что удлиненный элемент 308 совершает перемещение из первого положения 346 во второе положение 348, продолжая при этом передавать усилие 342 при необходимом пороговом значении 344.
[0091] В данном показанном примере первое положение 346 представляет собой длину удлиненного элемента 308, когда усилие 342 достигает необходимое пороговое значение 344. Второе положение 348 представляет собой длину удлиненного элемента 308 после того, как возникает скользящее перемещение скользящей муфты 322 сцепления, а усилие 342 уменьшается до величины ниже необходимого порогового значения 344.
[0092] В данном иллюстративном примере стыковочная конструкция 212 содержит область 332 сопряжения и выравнивающие элементы 336. В данном иллюстративном примере область 332 сопряжения представляет собой верхнюю поверхность захватного кольца 216. Область 332 сопряжения представляет собой часть захватного кольца 216, которое взаимодействует со стыковочным кольцом 218 космической станции 214, показанной на фиг.2.
[0093] Как показано, выравнивающие элементы 336 представляют собой конструктивные компоненты, скрепленные с захватным кольцом 216. Выравнивающие элементы 336 расположены вдоль захватного кольца 216.
[0094] В данном иллюстративном примере выравнивающие элементы 336 могут быть выполнены из материалов различных типов и могут иметь множество различных форм. Например, выравнивающие элементы 336 могут быть выполнены из металла, сплава металлов или материалов других подходящих типов и комбинаций материалов. Выравнивающие элементы 336 могут иметь треугольную форму, прямоугольную форму или какую-либо иную подходящую форму. В некоторых иллюстративных примерах выравнивающие элементы 336 могут называться как «лепестки».
[0095] Как показано, выравнивающие элементы 336 выполнены с возможностью направления и выравнивания стыковочной системы 210 космического летательного аппарата 202 со стыковочным кольцом 218 в космической станции 214. Поскольку космический летательный аппарат 202 и космическая станция 214 приведены в соответствие, выравнивающие элементы 336 позиционируют космический летательный аппарат 202 и космическую станцию 214 относительно друг друга.
[0096] В данном иллюстративном примере крепежная система 306, показанная на фиг. 3, выполнена с возможностью скрепления стыковочной конструкции 212 с конструкцией 204. Крепежная система 306 может содержать различные компоненты, выполненные с возможностью прикрепления стыковочной конструкции 212 к конструкции 204. Например, без ограничения, крепежная система 306 может содержать защелку, запирающий элемент, электромагниты или какое-либо иное устройство для сохранения соединения между захватным кольцом 216 и стыковочным кольцом 218.
[0097] При соединении космического летательного аппарата 202 с космической станцией 214 двигатели 316 перемещают удлиненные элементы 300 в осевом направлении таким образом, что происходит перемещение захватного кольца 216 космического летательного аппарата 202. Это перемещение происходит с заданной посредством команды скоростью 328 для каждого приводного узла в стыковочной системе 210.
[0098] Поскольку стыковочная система 210 выдвигается в направлении стыковочного кольца 218 в космической станции 214, область 332 сопряжения захватного кольца 216 взаимодействует со стыковочным кольцом 218 в одном или более мест вдоль захватного кольца 216. Удлиненные элементы 330 и захватное кольцо 216 прикладывают усилие 342 к стыковочному кольцу 218.
[0099] В ответ стыковочное кольцо 218 прикладывает нагрузку 338 к захватному кольцу 216 в местах вдоль захватного кольца 216, которые взаимодействовали со стыковочным кольцом 218. Например, захватное кольцо 216 может взаимодействовать со стыковочным кольцом 218 в некотором месте, расположенном рядом с местом соединения захватного кольца 216 и удлиненного элемента 308.
[00100] Поскольку в этой точке стыковочное кольцо 218 прикладывает нагрузку 338 к захватному кольцу 216, происходит замедление выдвижения удлиненного элемента 308. Другие удлиненные элементы 300 продолжают перемещаться с заданной посредством команды скоростью 328 до тех пор, пока удлиненные элементы 300 взаимодействуют с различными местами вдоль стыковочного кольца 218, и замедляются, поскольку нагрузку 338 прикладывают к захватному кольцу 216 стыковочным кольцом 218. Другими словами, нагрузка 338, прикладываемая к захватному кольцу 216 стыковочным кольцом 218, определяет усилие 342, прикладываемое удлиненными элементами 300 к захватному кольцу 216. Таким образом, приводной узел 325 работает независимо от других приводных узлов в стыковочной системе 210.
[00101] В данном иллюстративном примере выравнивающие элементы 336 выравнивают захватное кольцо 216 по отношению к стыковочному кольцу 218. Поскольку стыковочная система 210 выдвигается по направлению к космической станции 214, состояние 315 представляет собой выдвижение.
[00102] Когда захватное кольцо 216 и стыковочное кольцо 218 выравнивают необходимым образом, крепежная система 306 скрепляет захватное кольцо 216 со стыковочным кольцом 218. В данный момент времени захватывают состояние 315 стыковочной системы 210.
[00103] Как только крепежную систему 306 приводят в действие для скрепления захватного кольца 216 со стыковочным кольцом 218, состояние 315 изменяется на ослабление. Во время ослабления усилие 342, прикладываемое каждым из удлиненных элементов 300, регулируют с использованием систем 304 управления усилиями. В частности, настройки систем 304 управления усилиями регулируют на основании нагрузки 338. Например, когда усилие 342, прикладываемое удлиненным элементом 308 ко стыковочному кольцу 218, достигает необходимое пороговое значение 344, скользящая муфта 322 сцепления ограничивает передачу вращающего момента.
[00104] Нагрузка 338 в данный момент времени может быть больше усилия 342, прикладываемого удлиненным элементом 308. В итоге удлиненный элемент 308 может укорачиваться из первого положения 346 во второе положение 348, а скользящая муфта 322 сцепления может ограничивать передачу усилия удлиненным элементом 308. Таким образом, процесс продолжается до тех пор, пока захватное кольцо 216 и стыковочное кольцо 218 больше не будут совершать перемещение относительно друг друга в пределах выбранных допусков.
[00105] Таким образом, системы 304 управления усилиями пассивно ограничивают усилие 342, прикладываемое каждым из удлиненных элементов 300 в ответ на нагрузку 338, прикладываемую стыковочным кольцом 218 космической станции 214. Другими словами, в данном иллюстративном примере управление стыковочной системы 210 является механическим и происходит без вмешательства со стороны электронной системы управления, алгоритмов управления или программных приложений в космическом летательном аппарате 202 и/или космической станции 214. В итоге, стыковка космического летательного аппарата 202 с космической станцией 214 происходит без увеличения веса или сложности космического летательного аппарата 202 со стыковочной системой 210. Кроме того, трудности, связанные со стыковочной системой 210 и своими механическими компонентами, могут возникнуть с меньшей вероятностью по сравнению с некоторыми из используемых в настоящее время системами на основе программного обеспечения.
[00106] Изображение стыковочной системы 210, показанное на фиг. 2 и фиг. 3, не означает введение физических или архитектурных ограничений способом, согласно которому может быть реализован иллюстративный вариант реализации. В дополнение к показанным компонентам или вместо них могут быть использованы и другие компоненты. Некоторые компоненты могут быть необязательными. Кроме того, блоки представлены для иллюстрации некоторых функциональных компонентов. При реализации в иллюстративном варианте реализации один или более из этих блоков могут быть объединены с образованием различных блоков и/или разделены на различные блоки.
[00107] Например, стыковочное кольцо 218 в космической станции 214, показанной на фиг. 2, также может представлять собой активную конструкцию. В данном примере захватное кольцо 216 и стыковочное кольцо 218 могут совершать перемещение относительно друг друга для необходимого выравнивания космического летательного аппарата 202 и космической станции 214.
[00108] В других иллюстративных примерах стыковочная конструкция 212 может иметь другие формы, отличные от захватного кольца 216. Например, без ограничения, стыковочная конструкция 212 может представлять собой стержень, выполненный с возможностью сопряжения с конической конструкцией на космической станции 214.
[00109] Еще в одних иллюстративных примерах система 320 управления усилиями может представлять собой программу, выполненную с возможностью управления двигателем 318 в приводном узле 325. Например, вращающий момент, передаваемый двигателем 318, может быть ограничен электронной схемой вместо скользящей муфты 322 сцепления.
[00110] На фиг.4 показана диаграмма изменений состояний работы перемещающей системы в соответствии с иллюстративным вариантом реализации. В данном показанном примере конечный 400 автомат иллюстрирует пример одной из реализаций условий изменения состояния 315 двигателей 316 в стыковочной системе 210, показанной на фиг. 3. Конечный 400 автомат представляет собой пример реализации конечного 313 автомата, показанного на фиг. 3.
[00111] В данном иллюстративном примере конечный 400 автомат имеет различные состояния, которые возникают во время работы двигателей 316. Например, конечный 400 автомат имеет состояние 402 выдвижения, состояние 406 ослабления и состояние 408 втягивания. В частности, эти различные состояния представляют собой примеры состояния 315, которое может возникнуть у двигателя 318.
[00112] В состоянии 402 выдвижения захватное кольцо 216 начинает из положения готовности к стыковке, при этом захватное кольцо 216 проходит с обеспечением выравнивания со стыковочным кольцом 218, как описано в отношении фиг. 11. Скользящая муфта 322 сцепления, показанная на фиг. 3, имеет низкое усилие при скользящем перемещении в состоянии 402 выдвижения.
[00113] Выравнивающие элементы 336 на захватном кольце 216 и выравнивающие элементы на стыковочном кольце 218 выравнивают два кольца по отношению друг к другу. Каждый из приводных узлов в стыковочной системе 210 регулирует свое положение независимым образом для обеспечения возможности выравнивания захватного кольца 216 относительно стыковочного кольца 218.
[00114] Когда захватное кольцо выравнено и находится в пределах необходимого расстояния от стыковочного кольца, развертывают крепежную систему. В данном иллюстративном примере необходимое расстояние может составлять три миллиметра. Необходимое расстояние может быть определено с использованием измерительной системы, расположенной вдоль стыковочного кольца, или каким-либо иным подходящим способом в зависимости от конкретной реализации.
[00115] В данном иллюстративном примере крепежная система 306 в стыковочной системе 210 взаимодействует с корпусными защелками на стыковочном кольце 218. В некоторых иллюстративных примерах крепежная система 306 может содержать магнитные защелки, расположенные на захватном кольце 216 и/или стыковочном кольце 218.
[00116] В данном показанном примере работа двигателей 316 смещается к состоянию 406 ослабления после того, как крепежная система приводит захватное кольцо во взаимодействие со стыковочным кольцом (событие 412). Скользящая муфта 322 сцепления переключается на более высокое усилие при скользящем перемещении в состоянии 406 ослабления. В состоянии 406 ослабления между захватным кольцом 216 и стыковочным кольцом 218 существует свободный ход. В данном иллюстративном примере свободный ход представляет собой пять миллиметров. Состояние 406 ослабления возникает автоматически в ответ на то, что крепежная система соединяет захватное кольцо 216 и стыковочное кольцо 218.
[00117] В состоянии 406 ослабления, каждый из двигателей 316 работает способом, описанным на фиг. 13. В итоге усилия, прикладываемые приводными узлами в стыковочной системе 210, вызывают уменьшение или ограничение относительного перемещения между космическим летательным аппаратом 202 и космической станцией 214.
[00118] Работа двигателей 316 может быть изменена на состояние 408 втягивания при соблюдении множества условий. Например, работу двигателей 316 изменяют на состояние 408 втягивания, когда больше нет необходимости в прикреплении захватного кольца к стыковочному кольцу, а крепежная система выходит из взаимодействия (событие 416).
[00119] Еще в одном иллюстративном примере работу двигателей 316 изменяют на состояние 408 втягивания, в котором стыковочная система принимает команду начать жесткую стыковку (событие 414). В данном примере состояние 408 втягивания используют для приведения космического летательного аппарата 202 и космической станции 214 ближе друг к другу таким образом, что могут быть обеспечены прикрепление туннеля и его герметизация. Соответственно, можно осуществить обмен ресурсами между космическим летательным аппаратом 202 и космической станцией 214. Во время состояния 408 втягивания, приводные узлы втягиваются по направлению к убранному положению.
[00120] В некоторых иллюстративных примерах двигатели 316 могут работать в других состояниях, не показанных в конечном 400 автомате. Например, без ограничения, двигатели могут работать в состоянии выравнивания. В состоянии выравнивания на двигатели 316 выдают команду выдвинуть удлиненные элементы 300 на обычную длину, которая может представлять собой максимальную длину, или на другую обычную длину. В данном состоянии система готовится к переходу в состояние 408 втягивания, которое вытягивает два транспортных средства вместе вдоль осевого направления, что обеспечивает сведение их вместе при подготовке к жесткой стыковке, причем отдельная система крепко стягивает две стыковочные конструкции вместе для создания жесткого конструктивного соединения. В некоторых примерах достигается герметизированное соединение.
[00121] Изображение различных состояний в конечном 400 автомате не означает введение ограничения способом, согласно которому может быть реализован конечный 400 автомат. Конечный 400 автомат может иметь и другие состояния в дополнение к показанным состояниями или вместо них. Например, конечный 400 автомат также может иметь режим ручного управления, выдвижение в режим «готовности к захвату», режим сохранения положения, а также может иметь и другие режимы.
[00122] На фиг. 5 показана стыковочная система космического летательного аппарата в соответствии с иллюстративным вариантом реализации. В данном показанном примере стыковочная система 500 представляет собой пример одной из реализаций стыковочной системы 210, показанной в блочной форме на фиг. 3.
[00123] Как показано, стыковочная система 500 содержит захватное кольцо 502, приводные узлы 504 и выравнивающие элементы 508. Приводные узлы 504 представляют собой примеры реализаций приводного узла 325, показанного в блочной форме на фиг. 3. Приводные узлы 504 соединены с захватным кольцом 502 в местах 510 соединения.
[00124] В данном иллюстративном примере приводные узлы 504 также соединены с опорной пластиной 512. Опорная пластина 512 представляет собой стационарную конструкцию, прикрепленную к космическому летательному аппарату. Например, опорная пластина 512 может представлять собой платформу, прикрепленную к космическому летательному аппарату 102 для обеспечения стабильности стыковочной системы 108, показанной на фиг. 1. Несмотря на то, что опорная пластина 512 имеет кольцевую форму, в данном иллюстративном примере опорная пластина 512 может иметь различную форму. В других примерах опорная пластина 512 может представлять собой часть панели обшивки космического летательного аппарата 102 вместо отдельной платформы, как показано на данной фигуре.
[00125] Приводные узлы 504 соединены с опорной пластиной 512 в местах 514 соединения. В данном иллюстративном примере места 510 соединения и места 514 соединения представляют собой универсальные шарниры. В итоге, захватное кольцо 502 может перемещаться с шестью степенями свободы.
[00126] В данном иллюстративном примере выравнивающие элементы 508 расположены вдоль области 516 сопряжения захватного кольца 502 и выполнены с возможностью выравнивания захватного кольца 502 со второй конструкцией, такой как стыковочное кольцо 218, показанное на фиг. 2. В данном иллюстративном примере выравнивающие элементы 508 содержат три лепестка. Еще в одних иллюстративных примерах может быть представлено другое количество лепестков.
[00127] Несмотря на то, что это не показано на данной фигуре, выравнивающие элементы 508 могут быть расположены под углом к захватному кольцу 502. Другими словами, в некоторых иллюстративных примерах выравнивающие элементы 508 могут быть выровнены по направлению внутрь. В других иллюстративных примерах выравнивающие элементы 508 могут иметь другую ориентацию в зависимости от конкретной реализации. Например, один или более из выравнивающих элементов могут быть наклонены по направлению наружу.
[00128] Как показано, приводные узлы 504 содержат множество корпусов 518. Корпуса 518 выполнены с возможностью защиты компонентов в приводных узлах 504, включая двигатели, муфты сцепления, зубчатую передачу и другие компоненты. В данном иллюстративном примере корпуса 518 выполнены из металла, однако они также могут быть выполнены из материала другого типа с необходимыми свойствами для защиты функциональных компонентов приводных узлов 504. Как описано выше, каждый из приводных узлов 504 совершает независимое перемещение.
[00129] На фиг. 6 показан приводной узел в соответствии с иллюстративным вариантом реализации. В данном показанном примере приводной узел 600 представляет собой один из примеров реализации приводного узла 325, содержащего удлиненный элемент 308, двигатель 318 и скользящую муфту 322 сцепления, показанную в виде блока на фиг. 3. Приводной узел 600 также представляет собой пример функционального компонента, использованного в стыковочной системе 500, показанной на фиг. 5. Приводной узел 600 представляет собой пример одной из реализаций приводного узла в приводных узлах 504, показанных на фиг.5.
[00130] Как показано, приводной узел 600 содержит двигатель 602, тормоз 604, зубчатую передачу 606, шариковый винт 608, скользящую муфту 610 сцепления, шариковую гайку 611 и скользящую трубку 613. В данном иллюстративном примере приводной узел 600 представляет собой линейный привод. Другими словами, приводной узел 600 создает перемещение по прямой линии вдоль оси 612, которая проходит по центру через приводной узел 600. В других иллюстративных примерах приводной узел 600 может представлять собой привод другого типа в зависимости от задействованных функциональных возможностей.
[00131] В данном показанном примере двигатель 602 представляет собой пример одной из реализаций двигателя 318, показанного на фиг. 3. Двигатель 602 выполнен с возможностью поворотного перемещения шариковой гайки 611. По мере того, как двигатель 602 прикладывает вращающий момент, зубчатая передача 606 начинает поворачивать шариковую гайку 611. Скользящая трубка 613 прикреплена к шариковой гайке 611. По мере того, как шариковая гайка 611 совершает поворот вокруг своей оси, шариковая гайка 611 совершает перемещение в своем осевом направлении, поскольку канавки в шариковом винте 608 постоянно обеспечивают спиральную форму. По мере того, как шариковая гайка 611 совершает перемещение в осевом направлении, скользящая трубка 613 также совершает перемещение. Другими словами, скользящая трубка 613 выполнена с возможностью выдвижения и с возможностью втягивания на основании энергии, выдаваемой двигателем 602.
[00132] Конец 609 скользящей трубки 613 может быть прикреплен непосредственно к захватному кольцу 502, показанному на фиг.5. В других примерах шариковый винт 608 может быть прикреплен непосредственно к захватному кольцу 502. В данном иллюстративном примере тормоз 604 представляет собой механический компонент, выполненный с возможностью замедления перемещения приводного узла 600. Тормоз 604 используют для предотвращения перемещения приводного узла 600, когда прекращают подачу энергии на приводной узел 600.
[00133] Скользящая муфта 610 сцепления представляет собой один из примеров реализации скользящей муфты 322 сцепления, показанной в виде блока на фиг.3. Скользящая муфта 610 сцепления соединяет двигатель 602 с шариковым винтом 608 и выполнена с возможностью ограничения усилия, прикладываемого шариковым винтом 608, необходимым пороговым значением во время перемещения шарикового винта 608.
[00134] Скользящая муфта 610 сцепления выполнена с возможностью пассивного ограничения усилия, прикладываемого шариковым винтом 608 при приложении нагрузки второй конструкцией. Скользящая муфта 610 сцепления выполнена с возможностью скользящего перемещения, когда усилие достигает необходимое пороговое значение, таким образом, что скользящая трубка 613 совершает перемещение из первого положения во второе положение.
[00135] Один или более компонентов, показанных в приводном узле 600, расположены в корпусе 614. Корпус 614 представляет собой пример одного из корпусов 518, показанных в стыковочной системе 500, изображенной на фиг. 5. На данной фигуре корпус 614 показан в полуразрезе. Как показано, двигатель 602, тормоз 604, зубчатая передача 606 и скользящая муфта 610 сцепления расположены во внутренней части корпуса 614.
[00136] Изображения стыковочной системы 500, показанной на фиг. 5, и приводного узла 600, показанного на фиг.6, представляют собой примеры физической реализации стыковочной системы 210, показанной в блочной форме на фиг. 2. Эти изображения не означают ведение физических или архитектурных ограничений способом, согласно которому может быть реализован иллюстративный вариант реализации. В дополнение к показанным компонентам или вместо них могут быть использованы и другие компоненты. Некоторые компоненты могут быть необязательными.
[00137] Различные компоненты, показанные на фиг. 5 и фиг. 6, могут представлять собой иллюстративные примеры того, как компоненты, показанные в блочной форме на фиг. 2 и фиг. 3, могут быть реализованы в виде физических конструкций. Кроме того, некоторые из компонентов, показанных на фиг. 5 и фиг. 6, могут быть объединены с компонентами, показанными на фиг. 2 и фиг. 3, и/или использованы с компонентами, показанными на фиг. 2 и фиг. 3.
[00138] Например, в некоторых иллюстративных примерах шариковый винт 608 может быть соединен непосредственно с захватным кольцом 502, показанным на фиг. 5. В данном случае нет необходимости в скользящей трубке 613. В других иллюстративных примерах шариковая гайка 611 может прикладывать усилие непосредственно к захватному кольцу 502 для перемещения этого захватного кольца 502 необходимым образом.
[00139] На фиг. 7 показана стыковочная система, взаимодействующая со второй конструкцией, в соответствии с иллюстративным вариантом реализации. В данном показанном примере показано более подробное изображение части 110, показанной на фиг. 1. В данном иллюстративном примере стыковочная система 108 для космического корабля 106 находится в положении взаимодействия со стыковочной системой 700 космической станции 107. В данном иллюстративном примере стыковочная система 700 не совершает перемещение. Однако еще в одних иллюстративных примерах стыковочная система 700 может совершать перемещение.
[00140] Как показано, стыковочная система 108 космического корабля 106 содержит захватное кольцо 701, опорное кольцо 703, приводные узлы 705, выравнивающие элементы 707 и опорную пластину 709. В данном иллюстративном примере опорное кольцо 703 представляет собой конструктивный компонент, который обеспечивает место останова для втягивания захватного кольца 701.
[00141] Стыковочная система 700 космической станции 107 содержит стыковочное кольцо 702, выравнивающие элементы 704 и опорную пластину 711. Стыковочное кольцо 702 представляет собой пример одной из реализаций для стыкования кольца 218, показанного в блочной форме на фиг. 2. Выравнивающие элементы 704 направляют стыковочное кольцо 702 для взаимодействия с захватным кольцом 701. В данном иллюстративном примере выравнивающие элементы 704 расположены вдоль стыковочного кольца 702 и изогнуты под углом внутрь.
[00142] В данном показанном примере стыковочная система 108 показана в положении 706 готовности к стыковке. Положение 706 готовности к стыковке указывает на то, что стыковочная система 108 выдвинута таким образом, что выравнивающие элементы 707 могут взаимодействовать с выравнивающими элементами 704. Стыковочная система 108 выравнивается со стыковочной системой 700 с использованием в качестве направляющих выравнивающих элементов 707 и выравнивающих элементов 704.
[00143] На фиг. 8-11 показано перемещение стыковочной системы 108 во время различных стадий стыковки. Процесс, показанный на фиг. 8-18, обеспечивает только один из примеров способа, согласно которому может быть реализован иллюстративный вариант реализации.
[00144] На фиг. 8 показано еще одно изображение стыковочной системы, выровненной со второй конструкцией, в соответствии с иллюстративным вариантом реализации. В данном иллюстративном примере стыковочная система 108 находится в состоянии выдвижения. Другими словами, состояние 315 стыковочной системы 108, показанной на фиг.3, представляет собой выдвижение. Во время выдвижения удлиненные элементы в приводных узлах 705 в стыковочной системе 108 выдвигаются по направлению к стыковочному кольцу 702.
[00145] Во время выдвижения удлиненные элементы выдвигаются с заданной посредством команды скоростью до тех пор, пока захватное кольцо 701 не будет взаимодействовать со стыковочным кольцом 702. В данном иллюстративном примере между захватным кольцом 701 и стыковочным кольцом 702 имеется расстояние 800.
[00146] Как показано на этом виде, захватное кольцо 701 не выравнено со стыковочным кольцом 702. Соответственно, необходимо регулировать положение захватного кольца 701. Усилия контакта между компонентами в стыковочной системе 108 и стыковочной системе 700 выравнивают захватное кольцо 701 со стыковочным кольцом 702. В частности, выравнивающие элементы 707 и выравнивающие элементы 704 перемещают захватное кольцо 701 на одной линии со стыковочным кольцом 702.
[00147] На фиг. 9 показано изображение стыковочной системы, выровненной со второй конструкцией, в соответствии с иллюстративным вариантом реализации. В данном показанном примере расстояние 800 меньше расстояния, показанного на фиг. 7.
[00148] Выравнивающие элементы 707 на захватном кольце 701 и выравнивающие элементы 704 на стыковочном кольце 702 дополнительно выровняли две конструкции необходимым образом. В данном иллюстративном примере часть захватного кольца 701 будет взаимодействовать со стыковочным кольцом 702 раньше захватного кольца 701 в однозначно невыровненном состоянии. Захватное кольцо 701 и стыковочное кольцо 702 не могут быть надлежащим образом скреплены, если имеет место расхождение осей. Таким образом, стыковочная система 108 будет требовать регулировки для приведения захватного кольца 701 в выровненное состояние относительно стыковочного кольца 702 для обеспечения стыкования.
[00149] Как показано, захватное кольцо 701 сначала контактирует со стыковочным кольцом 702 в месте 900. Когда захватное кольцо 701 контактирует со стыковочным кольцом 702, нагрузку прикладывают к захватному кольцу 701 стыковочным кольцом 702. Нагрузка вызывает уменьшение скорости выдвижения соответствующих удлиненных элементов в приводных узлах 705.
[00150] В данном иллюстративном примере удлиненный элемент 902 и удлиненный элемент 904 расположены наиболее близко к месту 900. Соответственно, скорость выдвижения удлиненного элемента 902 и удлиненного элемента 904 будет уменьшаться на основании сопротивления, обнаруживаемого от стыковочного кольца 702 к захватному кольцу 701. Другие удлиненные элементы в стыковочной системе 108 продолжают выдвигаться с заданной посредством команды скоростью до тех пор, пока удлиненные элементы не встретят сопротивление.
[00151] Если сопротивление, с которым сталкиваются удлиненные элементы, превышает заданное ограничение, эти удлиненные элементы не будут выдвигаться дальше. В противном случае удлиненные элементы продолжат выдвигаться, но уже с меньшей скоростью по сравнению с определяемой заданной посредством команды скоростью.
[00152] На фиг. 10 показано еще одно изображение стыковочной системы, выровненной со второй конструкцией, в соответствии с иллюстративным вариантом реализации. В данном иллюстративном примере удлиненный элемент 902 и удлиненный элемент 904 были принудительно втянуты на основании сопротивления, с которым встречается захватное кольцо 701 при контакте со стыковочным кольцом 702 в месте 900, показанном на фиг.9.
[00153] Как видно на данном виде, расстояние 800 между захватным кольцом 701 и стыковочным кольцом 702 является по существу постоянным. Это выравнивание обеспечивает возможность необходимого сопряжения захватного кольца 701 и стыковочного кольца 702 таким образом, что по существу вся поверхность сопряжения захватного кольца 701 расположена заподлицо по отношению к поверхности сопряжения стыковочного кольца 702. Удлиненные элементы в приводных узлах 705 продолжают выдвигаться для полного устранения оставшейся несоосности двух колец.
[00154] На фиг. 11 показано еще одно изображение стыковочной системы, выровненной со второй конструкцией, в соответствии с иллюстративным вариантом реализации. В данном показанном примере поверхность сопряжения захватного кольца 701 взаимодействовала с поверхностью сопряжения стыковочного кольца 702.
[00155] Захватное кольцо 701 и стыковочное кольцо 702 теперь могут быть скреплены друг с другом с использованием крепежной системы (не показана). В данном иллюстративном примере крепежная система может представлять собой защелкивающуюся систему. В ответ на положительное соединение двух колец с использованием крепежной системы, показанной в блочной форме на фиг. 3, состояние 315 изменяется на ослабление для предотвращения остаточного относительно перемещения транспортного средства космического корабля 106 относительно космической станции 107 с использованием стыковочной системы 108.
[00156] На фиг. 12 показан график стыковочной системы при выдвижении в соответствии с иллюстративным вариантом реализации. В данном иллюстративном примере график 1200 иллюстрирует кривую усилие-скорость. На графике 1200 показаны характеристики приводного узла в стыковочной системе 108, показанной на фиг. 7. Эта характеристика представлена для каждого из приводных узлов в стыковочной системе 108, показанной на фиг.7.
[00157] Как показано, график 1200 имеет x-ось 1202 и y-ось 1203. Х-ось 1202 отражает скорость привода в стыковочной системе 108 в дюймах в секунду (сантиметрах в секунду), а y-ось 1203 отражает сопротивление, с которым сталкивается привод, в фунтах (граммах). Скорость каждого приводного узла предварительно определена в качестве заданной посредством команды скорости. В данном иллюстративном примере заданная посредством команды скорость составляет один дюйм (2,54 см) в секунду.
[00158] Когда приводной узел сталкивается с нулевым сопротивлением, этот приводной узел удлиняется с заданной посредством команды скоростью, как показано в точке 1204 на графике 1200. В данном иллюстративном примере привод также может иметь пороговое значение сопротивления. Пороговое значение сопротивления представляет собой максимальную величину усилия приводного узла, которую разрешено прикладывать, что возникает, когда предотвращено вообще какое-либо выдвижение приводного узла с внешней стороны.
[00159] В точке 1206 на графике 1200 приводной узел имеет пороговое значение сопротивления. Соответственно, скорость приводного узла составляет ноль. Линия 1208 отражает характер поведения приводного узла между точкой 1204 и точкой 1206 на графике 1200.
[00160] Если сопротивление, оказываемое на приводный узел, превышает пороговое значение сопротивления, скорость становится отрицательной. Другими словами, приводной узел будет втягиваться или укорачиваться на основании величины сопротивления, с которым сталкивается привод. Таким образом, каждый приводной узел в стыковочной системе 108 ведет себя пассивно и независимо во время выдвижения стыковочной системы 108.
[00161] На фиг. 13 показан график стыковочной системы в режиме ослабления в соответствии с иллюстративным вариантом реализации. В данном иллюстративном примере на графике 1300 показано относительное положение приводного узла на основании усилия, прикладываемого к муфте сцепления, соответствующей приводу. На графике 1300 показана характеристика каждого приводного узла в стыковочной системе 108, показанной на фиг. 7.
[00162] В данном показанном примере график 1300 имеет x-ось 1302 и y-ось 1304. x-ось 1302 отражает относительное положение удлиненного элемента в приводном узле в дюймах (сантиметрах). Другими словами, длина приводного узла показана вдоль x-оси 1302.
[00163] Как показано, y-ось 1304 отражает нагрузку муфты сцепления в фунтах (граммах). В данном иллюстративном примере пороговое значение нагрузки муфты сцепления обозначено как Fmax 1305. Пороговое значение нагрузки муфты сцепления, Fmax 1305, представляет собой максимальную величину усилия, которое муфта сцепления будет выдерживать без скользящего перемещения. В данном иллюстративном примере Fmax 1305 представляет собой предварительно определенное значение. Когда нагрузка муфты сцепления достигает Fmax 1305, муфта сцепления выполнена с возможностью скользящего перемещения.
[00164] В данном иллюстративном примере положение 1306 отражает текучую длину приводного узла. Свободный ход 1308 представляет собой расстояние, на которое приводной узел может удлиняться или укорачиваться благодаря механическому свободному ходу в зубчатой передаче и месте соединения, также обычно называемых как «мертвый ход».
[00165] В данном показанном примере приводной узел противодействует положению 1306 выхода сразу после свободного хода 1308. По мере увеличения нагрузки муфты сцепления, положение приводного узла изменяется в ответ на увеличение нагрузки. Линия 1310 и линия 1312 представляют собой кривые жесткости, которые иллюстрируют наличие пропорционального смещения приводного узла в виде функции от прикладываемой сжимающей или растягивающей нагрузки. Когда нагрузка достигает нагрузки при скользящем перемещении, приводной узел не будет противодействовать увеличивающейся нагрузке, однако он будет совершать скользящее перемещение с постоянным сопротивлением.
[00166] Когда нагрузка муфты сцепления достигает Fmax 1305, муфта сцепления совершает скользящее перемещение, продолжая при этом выдерживать нагрузку 1305, составляющую Fmax, а скользящее перемещение происходит до тех пор, пока привод больше не будет сталкиваться с сопротивлением, оказываемым стыковочным кольцом 702. В данном случае скользящее перемещение указано стрелкой 1307 на графике 1300. В итоге происходит уменьшение нагрузки муфты сцепления. Линия 1314 представляет один из примеров уменьшающейся нагрузки муфты сцепления. Положение 1316 представляет собой новое положение приводного узла, отражающее новое удлиненное состояние приводного узла после возникновения скользящего перемещения. Приводной узел теперь противодействует перемещению из положения 1316 тем же самым способом, как описано выше.
[00167] Схожий результат возникает в противоположном направлении. Когда нагрузка муфты сцепления достигает Fmin 1317, скользящее перемещение происходит до тех пор, пока не уменьшится уровень нагрузки муфты сцепления. В данном случае скользящее перемещение указано стрелкой 1309 на графике 1300. Линия 1318 представляет один из примеров величины уменьшающейся нагрузки муфты сцепления. Положение 1320 представляет собой новое положение приводного узла, отражающее новую укороченную длину приводного узла после возникновения скользящего перемещения. Приводной узел теперь противодействует перемещению из положения 1320.
[00168] Процесс ослабления, описанный на этой фигуре, будет возникать один или более раз во время состояния ослабления до тех пор, пока нагрузка муфты сцепления более не будет достигать Fmax 1305 или Fmin 1317, и, таким образом, не возникает какого-либо скользящего перемещения. Таким образом, стыковочная система 108 выполнена с возможностью ослабления усилий и поглощения остаточной относительной энергии транспортного средства между космическим кораблем 106 и космической станцией 107. Каждый приводной узел совершает независимое перемещение с использованием процесса ослабления, описанного на данной фигуре.
[00169] На фиг. 14 показана блок-схема процесса стыкования космического летательного аппарата в соответствии с иллюстративным вариантом реализации. Как показано, процесс, описанный на фиг. 14, может представлять собой пример процесса, реализуемого в среде 200 стыковки с использованием стыковочной системы 210, показанной на фиг. 2. В частности, процесс, описанный на фиг. 14, представляет собой пример операций, которые могут быть выполнены во время состояния 402 выдвижения, показанного в конечном 400 автомате, изображенном на фиг. 4.
[00170] Процесс начинается с перемещения удлиненных элементов в осевом направлении таким образом, что стыковочная конструкция космического летательного аппарата совершает перемещение (операция 1400). Затем процесс определяет, контактировала ли стыковочная конструкция со стыковочным кольцом второй конструкции в месте вдоль стыковочной конструкции (операция 1402). Если стыковочная конструкция вступила в контакт со стыковочным кольцом, этот контакт замедляет скорость перемещения удлиненных элементов, расположенных наиболее близко к этому месту, вдоль стыковочной конструкции при приложении нагрузки к стыковочной конструкции стыковочным кольцом (операция 1404). Если стыковочная конструкция не была соединена со стыковочным кольцом, то процесс возвращается к операции 1400.
[00171] Во время операции 1400 и операции 1402, каждый из удлиненных элементов 300 работает независимым образом. Другими словами, пока скорость перемещения уменьшается для некоторых из удлиненных элементов 300, другие удлиненные элементы продолжают перемещаться с заданной посредством команды скоростью 328.
[00172] Соответственно, процесс выравнивает стыковочную конструкцию со стыковочным кольцом с использованием группы из выравнивающих элементов (операция 1406). В дальнейшем определяют, находится ли стыковочная конструкция на необходимом расстоянии от стыковочного кольца (операция 1408).
[00173] Если стыковочная конструкция находится на необходимом расстоянии от стыковочного кольца, то определяют, имеет ли стыковочная конструкция необходимое выравнивание со стыковочным кольцом (операция 1410). Если имеет, то процесс переходит к скреплению соответственно стыковочной конструкции и стыковочного кольца (операция 1412) с последующим завершением процесса.
[00174] Возвращаясь к операции 1408, если стыковочная конструкция не находится на необходимом расстоянии от стыковочного кольца, то процесс возвращается к операции 1400, как описано выше. Аналогичным образом для операции 1410, если стыковочная конструкция не имеет необходимого выравнивания со стыковочным кольцом, то процесс возвращается к операции 1400.
[00175] На фиг. 15 показана блок-схема процесса стыкования космического летательного аппарата в соответствии с иллюстративным вариантом реализации. Как показано, процесс, описанный на фиг. 15, может представлять собой пример процесса, реализуемого в среде 200 стыковки с использованием стыковочной системы 210, показанной на фиг. 2. В частности, процесс, описанный на фиг. 15, представляет собой пример операций, которые могут быть выполнены во время осуществления операции 1412, показанной на фиг. 14.
[00176] Процесс начинается с приема команды на развертывание крепежной системы (операция 1500). Затем процесс развертывает крепежную систему (операция 1502). Затем процесс соединяет стыковочную конструкцию со стыковочным кольцом (операция 1504). После соединения стыковочной конструкции со стыковочным кольцом, процесс входит в состояние ослабления (операция 1506) соответственно с последующим завершением процесса.
[00177] На фиг. 16 показана еще одна блок-схема процесса стыкования космического летательного аппарата в соответствии с иллюстративным вариантом реализации. Как показано, процесс, описанный на фиг. 16, может представлять собой пример процесса, реализуемого в среде 200 стыковки с использованием стыковочной системы 210, показанной на фиг. 2. В частности, процесс, описанный на фиг. 16, представляет собой пример операций, которые могут быть выполнены во время состояния 406 ослабления, показанного в конечном 400 автомате, изображенном на фиг. 4.
[00178] Процесс начинается с приложения усилия с использованием удлиненных элементов (операция 1600). Каждый из удлиненных элементов 300 может прикладывать усилие 342 независимо от других удлиненных элементов 300.
[00179] Затем определяют, достигло ли усилие необходимого порогового значения (операция 1602). Например, определяют, достигло ли усилие 342 каждого из удлиненных элементов 300 необходимого порогового значения 344.
[00180] Если усилие достигло необходимого порогового значения, то процесс ограничивает усилие, прикладываемое каждым из удлиненных элементов (операция 1604). Ограничение усилия, прикладываемого каждым из удлиненных элементов 300, может быть достигнуто с использованием скользящей муфты сцепления, как описано выше. Если усилие не достигло необходимое пороговое значение, то процесс возвращается к операции 1600.
[00181] Соответственно, процесс обеспечивает перемещение удлиненных элементов из первого положения во второе положение (операция 1606) с последующим возвратом процесса к операции 1600. Состояние 406 ослабления будет продолжаться до тех пор, пока стыковочная конструкция 212 и стыковочное кольцо 218 не будут совершать перемещение относительно друг друга за пределами выбранных допусков. Эти выбранные допуски могут представлять собой свободный ход 1308, как описано на фиг. 13.
[00182] После завершения стыковки может возникнуть состояние 408 втягивания стыковочной конструкции 212. Состояние 408 втягивания стыковочной конструкции 212 может возникать в ответ на команду вывести из взаимодействия крепежную систему 306 или привести космическую станцию 214 ближе к космическому летательному аппарату 202 таким образом, что может быть развернут герметизированный туннель для соединения космического летательного аппарата 202 с космической станцией 214.
[00183] Блок-схемы и структурные схемы в различных показанных вариантах реализации иллюстрируют архитектуру, функциональные возможности и работу некоторых возможных реализаций устройств и способов в иллюстративном варианте реализации. При этом каждый блок в блок-схемах или структурных схемах может представлять модуль, сегмент, функцию и/или часть операции или этапа.
[00184] В некоторых альтернативных реализациях иллюстративного варианта реализации функция или функции, указанные в блоках, могут выполняться в порядке, указанном на фигурах. Например, в некоторых случаях два блока, показанные последовательно, могут быть выполнены по существу одновременно или эти блоки могут иногда быть выполнены в обратном порядке в зависимости от задействованной функциональности. Кроме того, в дополнение к блокам, показанным в блок-схеме или структурной схеме, могут быть добавлены и другие блоки.
[00185] Иллюстративные варианты реализации настоящего изобретения могут быть описаны в контексте способа 1700 изготовления и обслуживания космического летательного аппарата, показанного на фиг. 17, и космического летательного аппарата 1800, показанного на фиг. 18. На фиг. 17 показана блок-схема способа изготовления и обслуживания космического летательного аппарата в соответствии с иллюстративным вариантом реализации. Стыковочная система 210 и компоненты в этой стыковочной системе 210 могут быть произведены и установлены во время различных этапов способа 1700 изготовления и обслуживания космического летательного аппарата. Эти модификации могут быть осуществлены на земле или в некоторых случаях в космосе.
[00186] Во время подготовки к изготовлению способ 1700 изготовления и обслуживания космического летательного аппарата может включать проработку и проектирование 1702 космического летательного аппарата 1800, показанного на фиг. 18, и материальное снабжение 1704. Во время производства происходит изготовление 1706 компонентов и подблоков и интеграция 1708 систем космического летательного аппарата 1800, показанного на фиг. 18.
[00187] Соответственно, космический летательный аппарат 1800, показанный на фиг. 18, может пройти через сертификацию 1710 для его помещения на обслуживание 1712. Сертификация 1710 может включать удовлетворение требований заказчика, отраслевых требований, правительственных требований или их сочетания. При нахождении на обслуживании заказчиком, для космического летательного аппарата 1800, показанного на фиг. 18, составляют расписание планового технического обеспечения и обслуживания 1714, которое может включать модификацию, перенастройку, восстановление и другое техническое обеспечения или обслуживание.
[00188] Каждый из процессов способа 1700 изготовления и обслуживания космического летательного аппарата может быть выполнен или осуществлен системным интегратором, третьей стороной и/или оператором. В этих примерах оператор может представлять собой заказчика. Для целей данного описания системный интегратор может содержать, без ограничения, любое количество производителей воздушных судов и субподрядчиков по основным системам, третья сторона может содержать, без ограничения, любое количество продавцов, субподрядчиков и поставщиков, а оператор может представлять собой авиакомпанию, лизинговую компанию, военную организацию, обслуживающую организацию и т.п.
[00189] На фиг. 18 показан космический летательный аппарат в виде блок-схемы способа, согласно которому может быть реализован иллюстративный вариант реализации. В данном иллюстративном примере космический летательный аппарат 1800 создают способом 1700 изготовления и обслуживания космического летательного аппарата, показанным на фиг. 17. Космический летательный аппарат 1800 может содержать корпус 1802 с множеством систем 1804 и внутренней частью 1806.
[00190] Примеры множества систем 1804 включают движительную систему 1808, электрическую систему 1810, гидравлическую систему 1812, климатическую систему 1814 и систему 1816 тепловой защиты. Несмотря на то, что пример показан для авиакосмической промышленности, различные иллюстративные варианты реализации могут быть применены в других отраслях промышленности, таких как авиационная промышленность, автомобильная промышленность, судостроительная промышленность и/или других подходящих отраслях промышленности.
[00191] Устройства и способы, реализованные в настоящей заявке, могут быть применены во время по меньшей мере одного из этапов способа 1700 изготовления и обслуживания космического летательного аппарата, показанного на фиг. 17. В частности, стыковочная система 210, показанная на фиг. 2, может быть установлена во время любого одного из этапов способа 1700 изготовления и обслуживания космического летательного аппарата. Например, без ограничения, стыковочная система 210, показанная на фиг.2, может быть установлена в космическом летательном аппарате 1800 во время по меньшей мере одного из следующих этапов: изготовление 1706 компонентов и подблоков, интеграция 1708 систем, технического обеспечения и обслуживания 1714 или другого этапа способа 1700 изготовления и обслуживания космического летательного аппарата.
[00192] В одном из иллюстративных примеров компоненты или подблоки, выполненные во время этапа изготовления 1706 компонентов и подблоков, показанного на фиг. 17, могут быть произведены или изготовлены способом, сходным с компонентами или подблоками, выполненными во время нахождения космического летательного аппарата 1800 на обслуживании 1712 на фиг. 17.
[00193] Еще в одном иллюстративном примере множество вариантов реализации аппарата, вариантов реализации способа или их сочетании могут быть использованы во время этапов производства, таких как изготовление 1706 компонентов и подблоков и интеграция 1708 систем, показанных на фиг. 17.
[00194] Во время нахождения космического летательного аппарата 1800 на обслуживании 1712 и/или во время технического обеспечения и обслуживания 1714, показанных на фиг. 17 могут быть использованы множество вариантов реализации аппарата, вариантов реализации способа или их сочетание. Использование множества различных иллюстративных вариантов реализации может по существу ускорить сборку и/или уменьшить стоимость космического летательного аппарата 1800.
[00195] Таким образом, в иллюстративных вариантах реализации предложены способ и устройство для стыкования космического летательного аппарата 202. Устройство содержит удлиненные элементы 300, перемещающие системы 302 и системы 304 управления усилиями, соединяющие перемещающие системы 302 с удлиненными элементами 300. Удлиненные элементы 300 связаны со стыковочной системой 212 космического летательного аппарата 202. Перемещающие системы 302 выполнены с возможностью перемещения удлиненных элементов 300 в осевом направлении таким образом, что происходит перемещение стыковочной системы 212 космического летательного аппарата 202. Каждый из удлиненных элементов 300 совершают независимое друг от друга перемещение. Во время перемещения удлиненных элементов 300 системы 304 управления усилиями выполнены с возможностью ограничения усилия 342, прикладываемого каждым из удлиненных элементов 300, необходимым пороговым значением 344.
[00196] При использовании стыковочной системы 210 нет необходимости в сложных алгоритмах управления, датчиках нагрузки или программном обеспечении для стыковки космического летательного аппарата 202 со второй конструкцией. Вместо этого стыковочная система 210 упрощает процесс, поскольку ослабление усилий происходит пассивным образом, а именно без системы управления по замкнутому кругу. В итоге, стыковочной системе 210 требуется меньшее количество аппаратных средств и, таким образом, эта стыковочная система 210 имеет меньший вес и меньшую сложность по сравнению с используемыми в настоящее время стыковочными системами.
[00197] Кроме того, стыковочная система 210 работает с использованием упрощенной системы с механическими компонентами, которые характеризуются меньшей вероятностью нежелательных последствий в космосе. Соответственно, стыковочная система 210 может быть более надежной по сравнению с другими стыковочными системами.
[00198] Описание различных иллюстративных вариантов реализации было приведено для целей иллюстрации и описания, при этом не следует полагать, что оно исчерпано или ограничено раскрытыми вариантами реализации. Специалистам в данной области техники будут очевидны многие модификации и изменения. Кроме того, различные иллюстративные варианты реализации могут обеспечивать различные признаки по сравнению с необходимыми вариантами реализации. Отобранные варианты реализации или отобранный вариант реализации выбраны и описаны для наилучшего объяснения принципов вариантов реализации, практического применения, а также для обеспечения возможности понимания другими специалистами в уровне техники настоящего изобретения на основе различных примеров реализации с различными модификациями, которые подходят для конкретного предполагаемого использования.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПУСКА РАКЕТ И ВСПОМОГАТЕЛЬНАЯ АППАРАТУРА | 2011 |
|
RU2551047C2 |
| СИСТЕМА РАЗВЕРТЫВАНИЯ КОМПОНЕНТОВ | 2014 |
|
RU2678296C2 |
| АКТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА С ПЕРЕМЕННЫМ РАЗРЕШЕНИЕМ | 2016 |
|
RU2721304C2 |
| СИСТЕМА ИДЕНТИФИЦИРОВАНИЯ ЗАГРЯЗНЯЮЩИХ ВЕЩЕСТВ | 2013 |
|
RU2629881C2 |
| СИНХРОНИЗИРОВАННАЯ ФАЗИРОВАННАЯ РЕШЕТКА И ИНФРАКРАСНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВЛАГИ | 2018 |
|
RU2769256C2 |
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765065C2 |
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765040C2 |
| ОБСЛУЖИВАЮЩИЕ УСТРОЙСТВА КОСМИЧЕСКОГО АППАРАТА И СООТВЕТСТВУЮЩИЕ УЗЛЫ, СИСТЕМЫ И СПОСОБЫ | 2018 |
|
RU2765021C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ВЛАГИ | 2018 |
|
RU2767118C2 |
| ПОЛЗАЮЩАЯ СИСТЕМА НА МАЛОМ НЕСУЩЕМ ЭЛЕМЕНТЕ | 2014 |
|
RU2681034C2 |
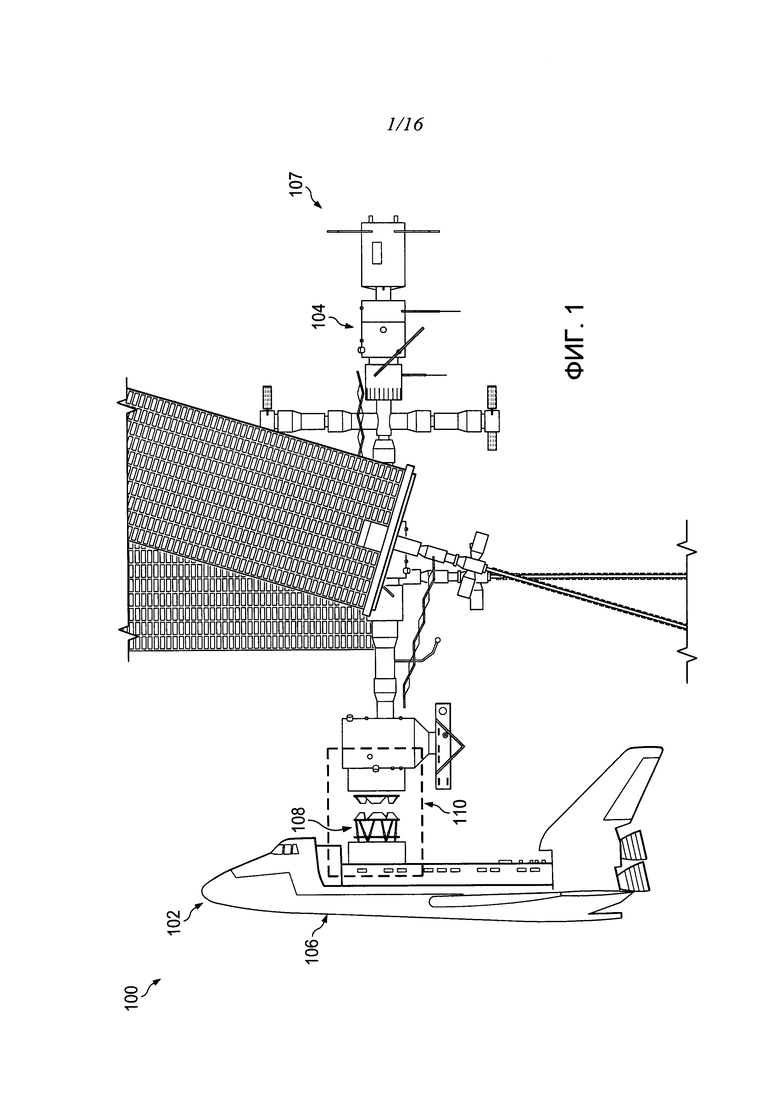
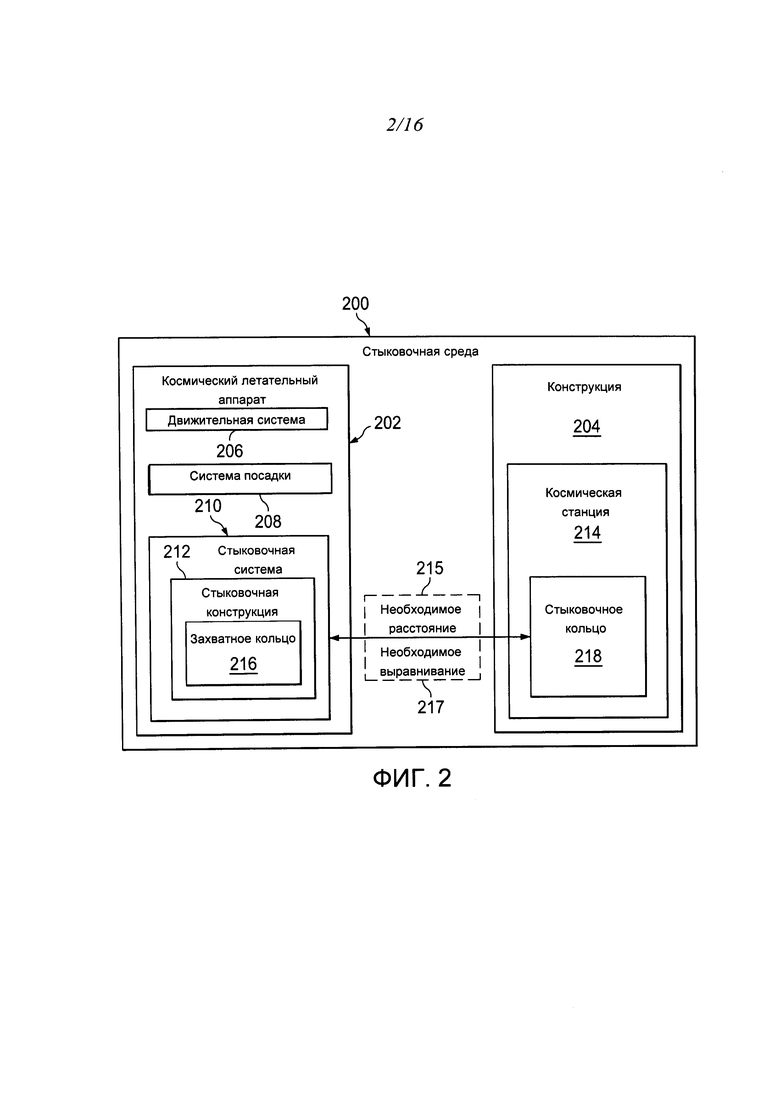
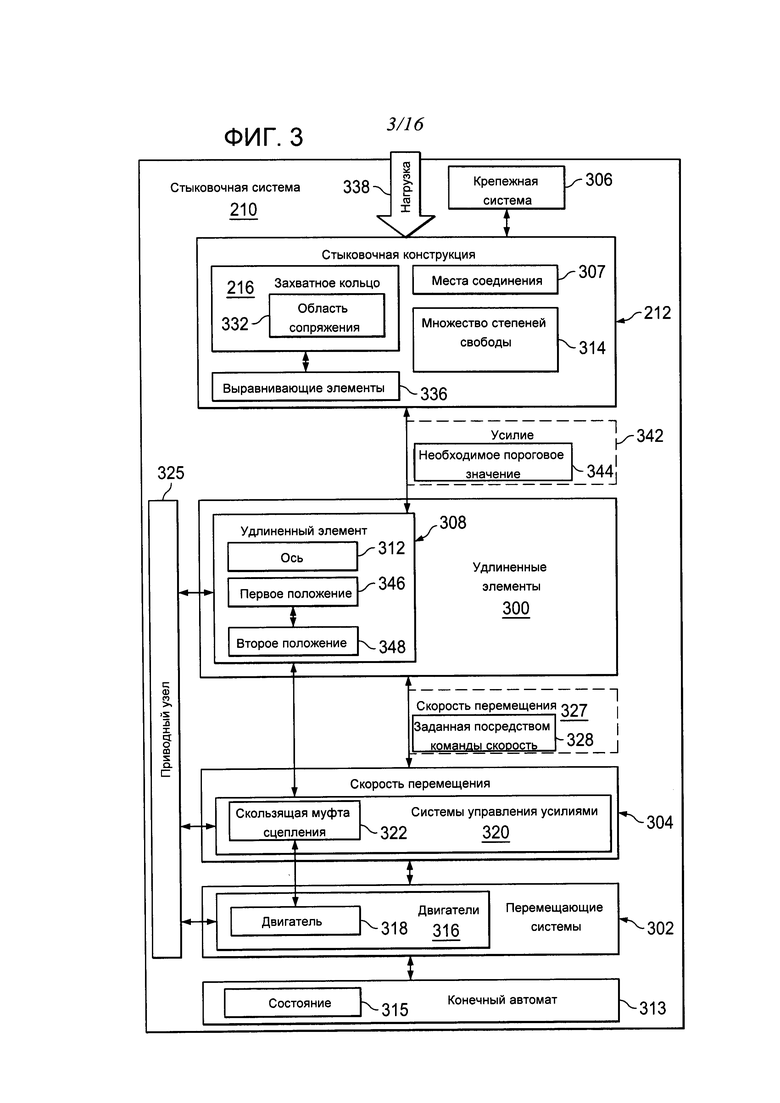
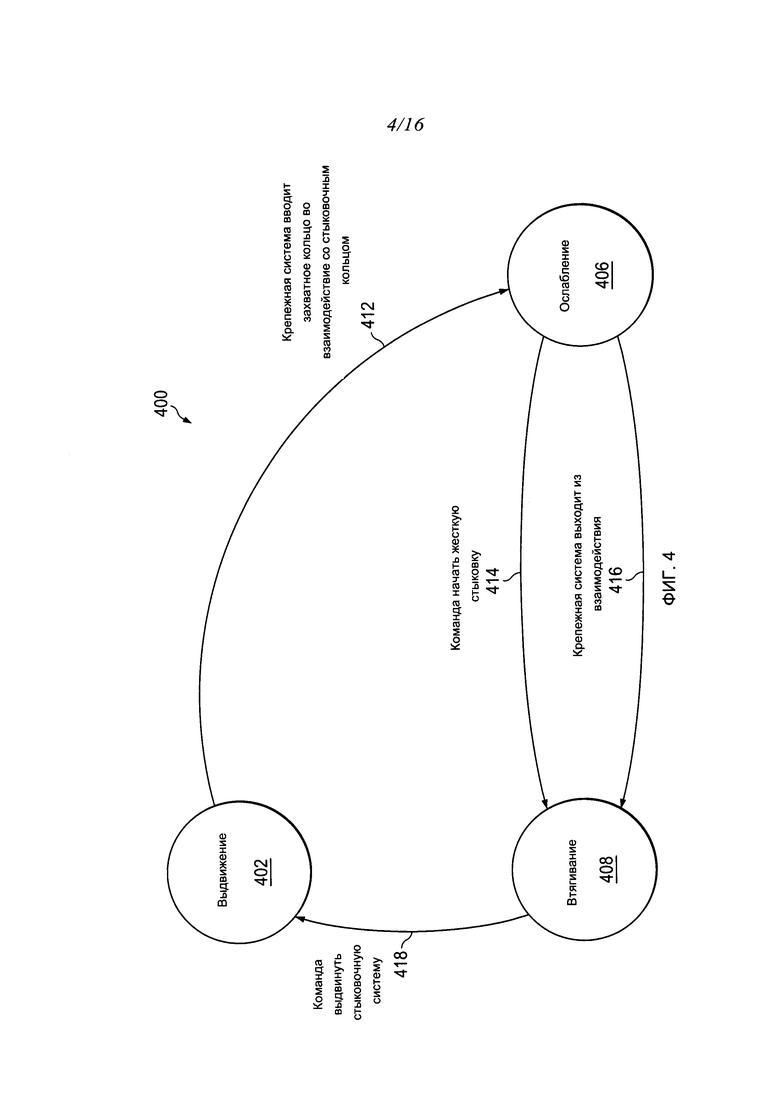
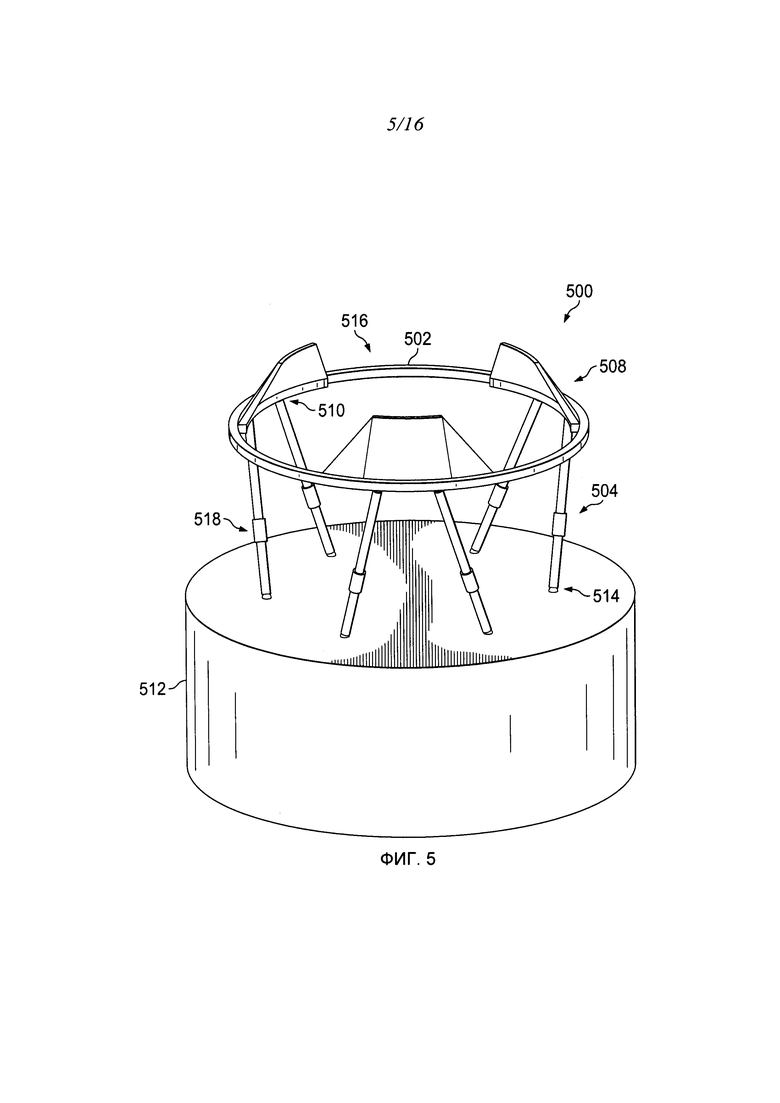
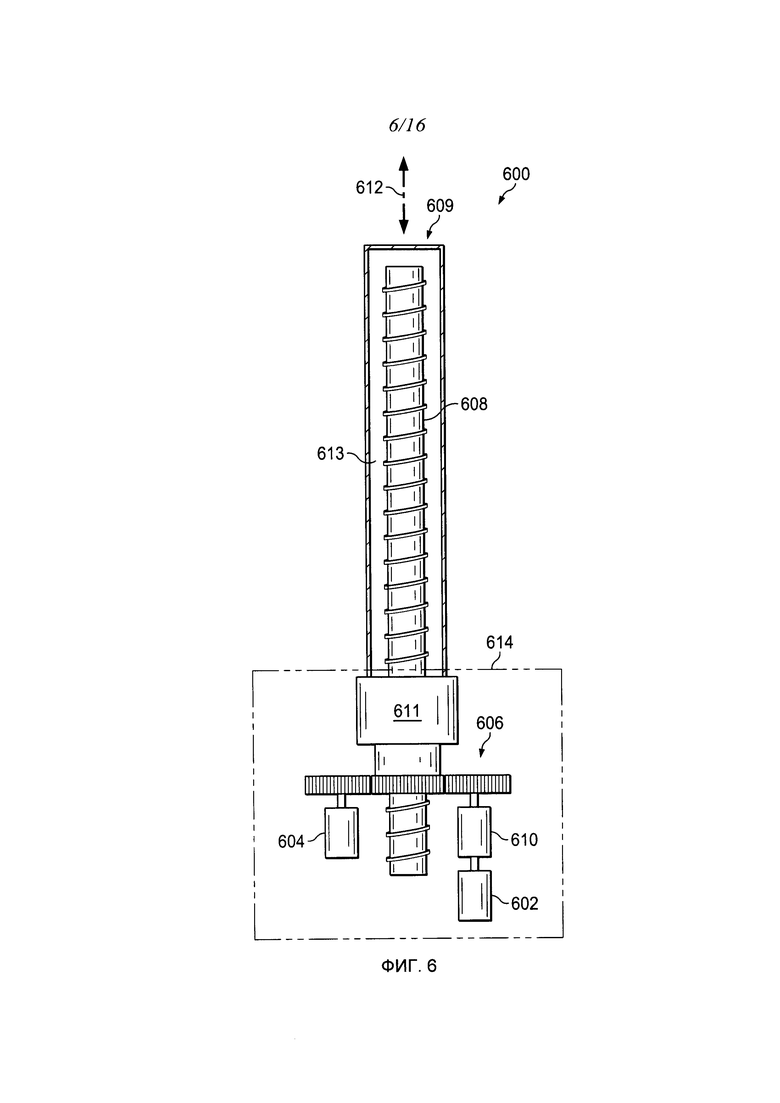
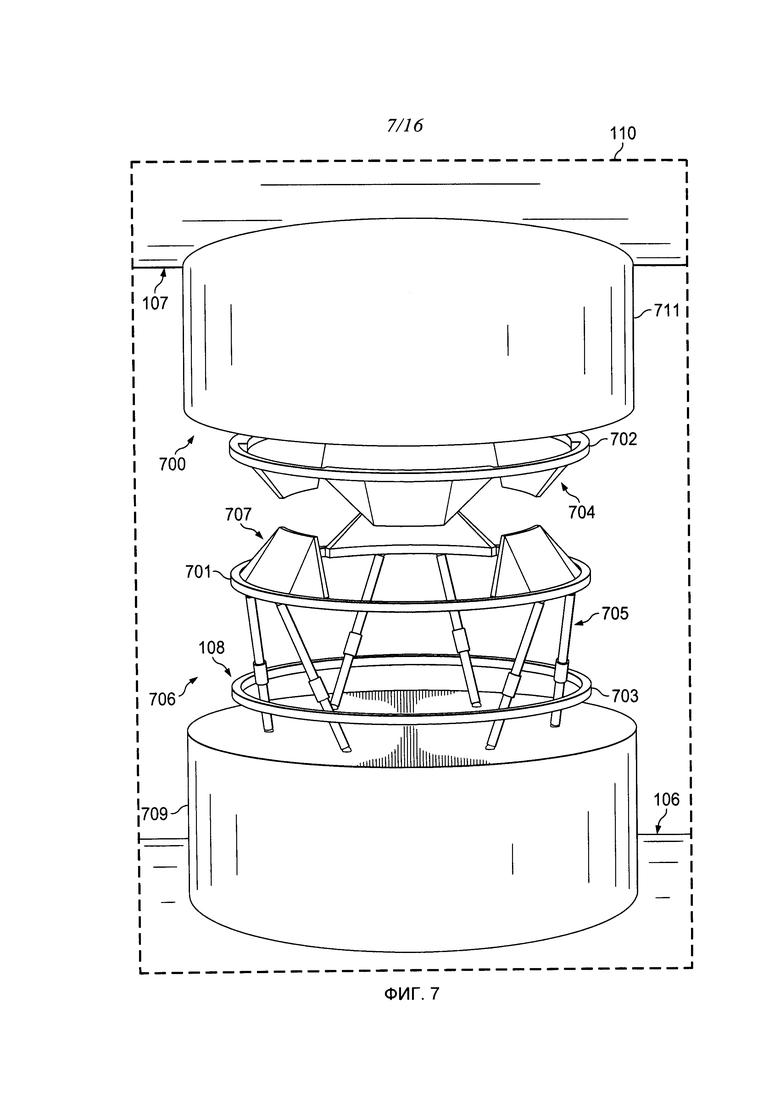
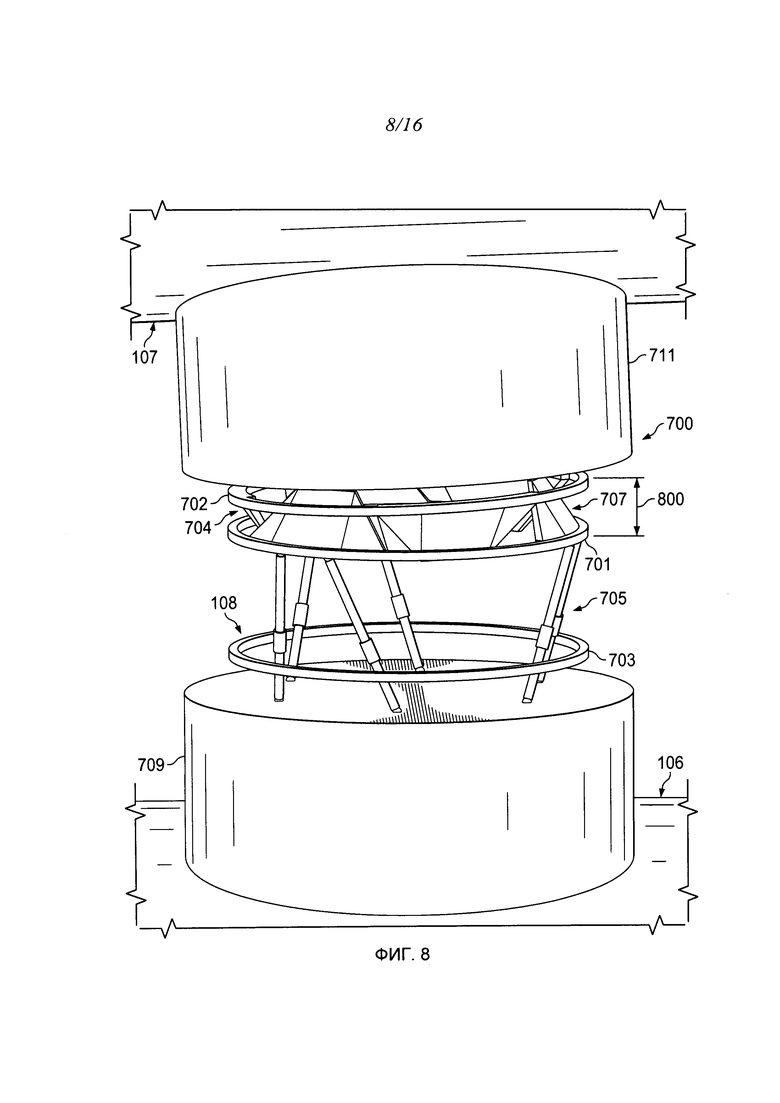
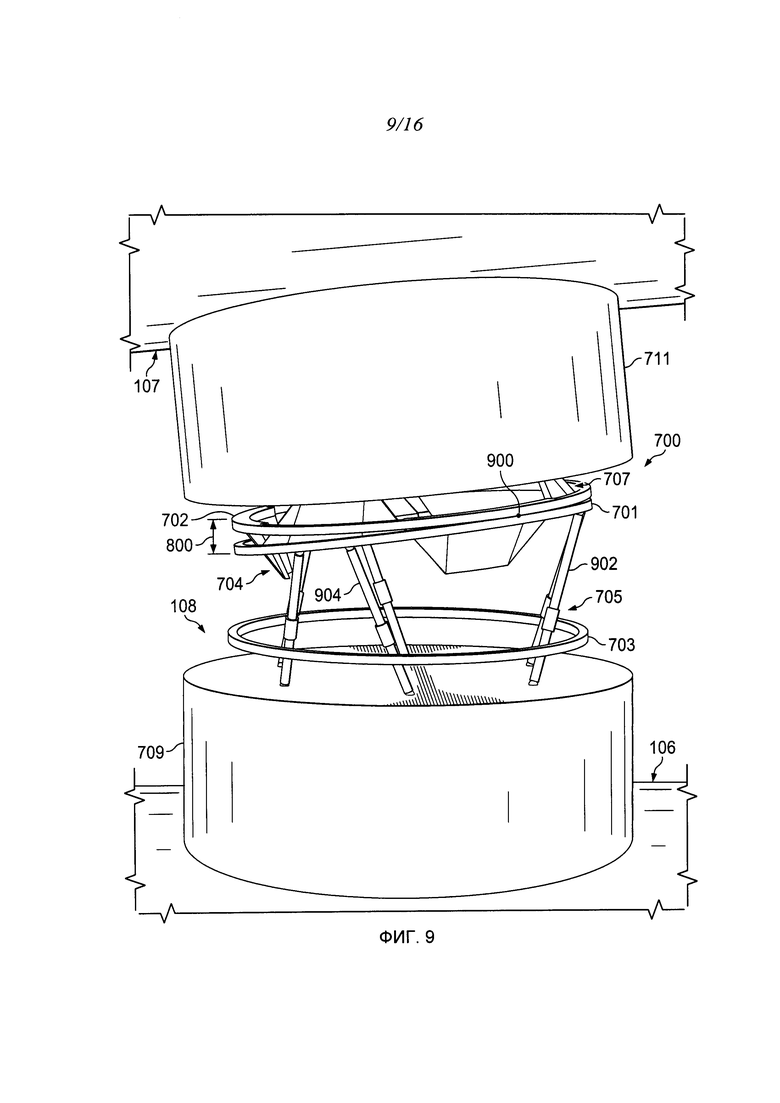
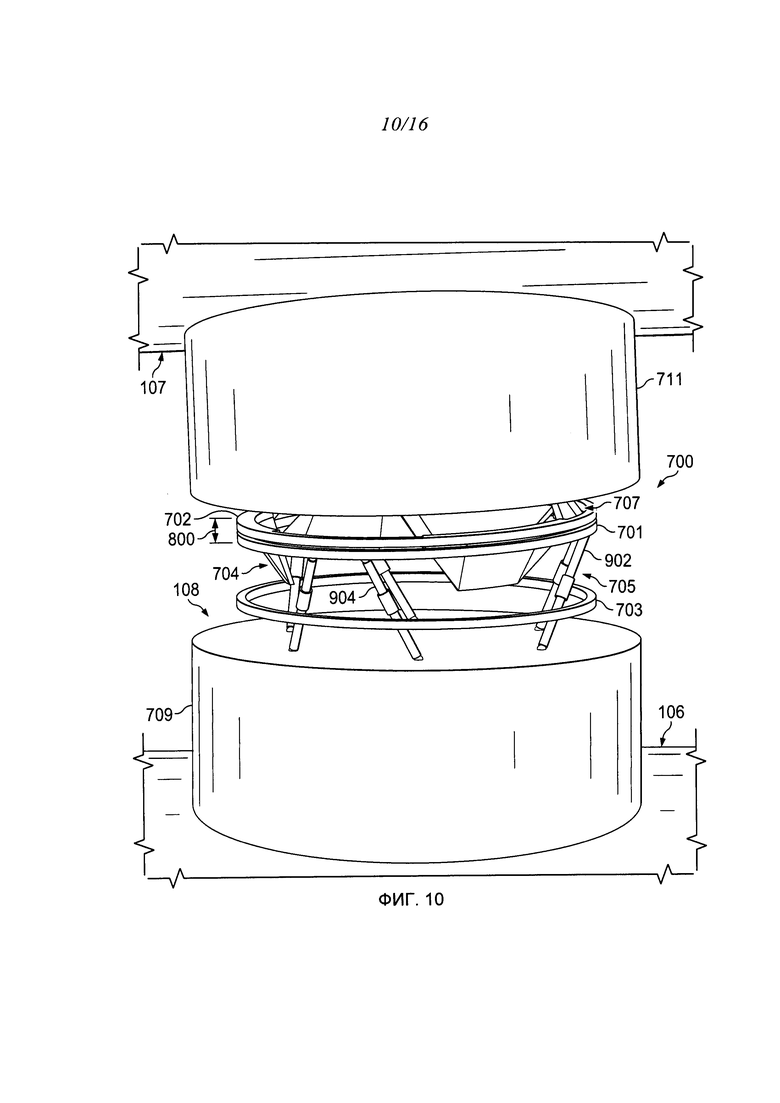
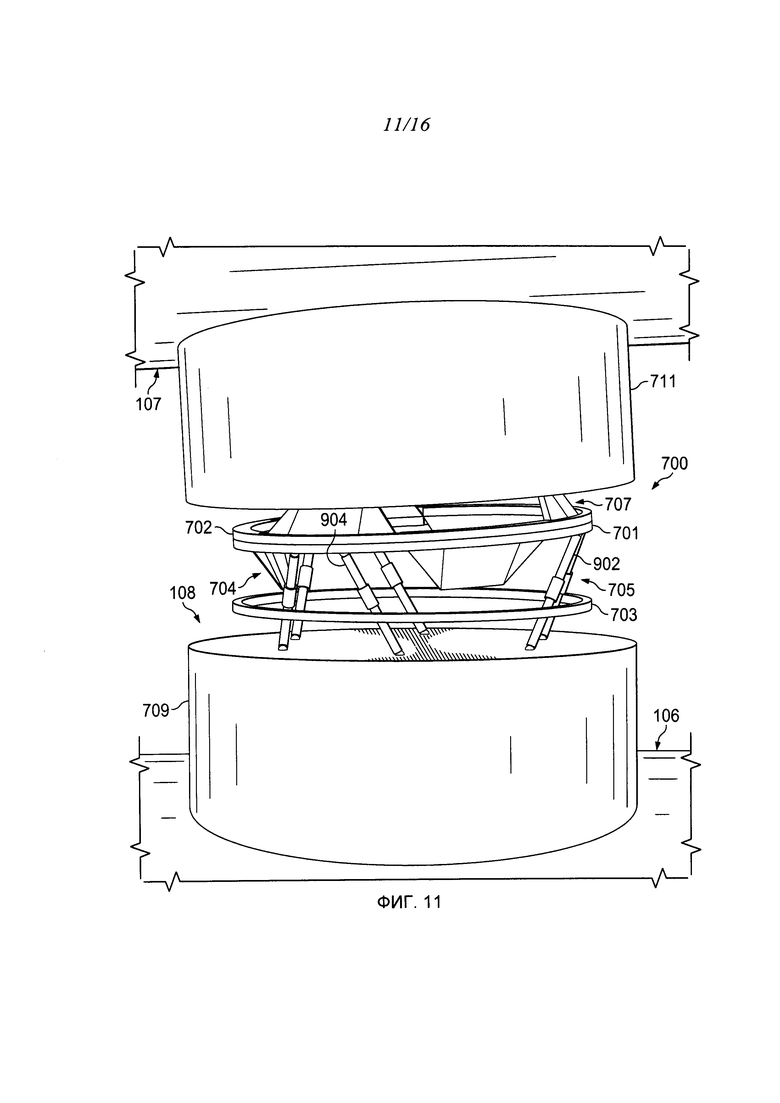
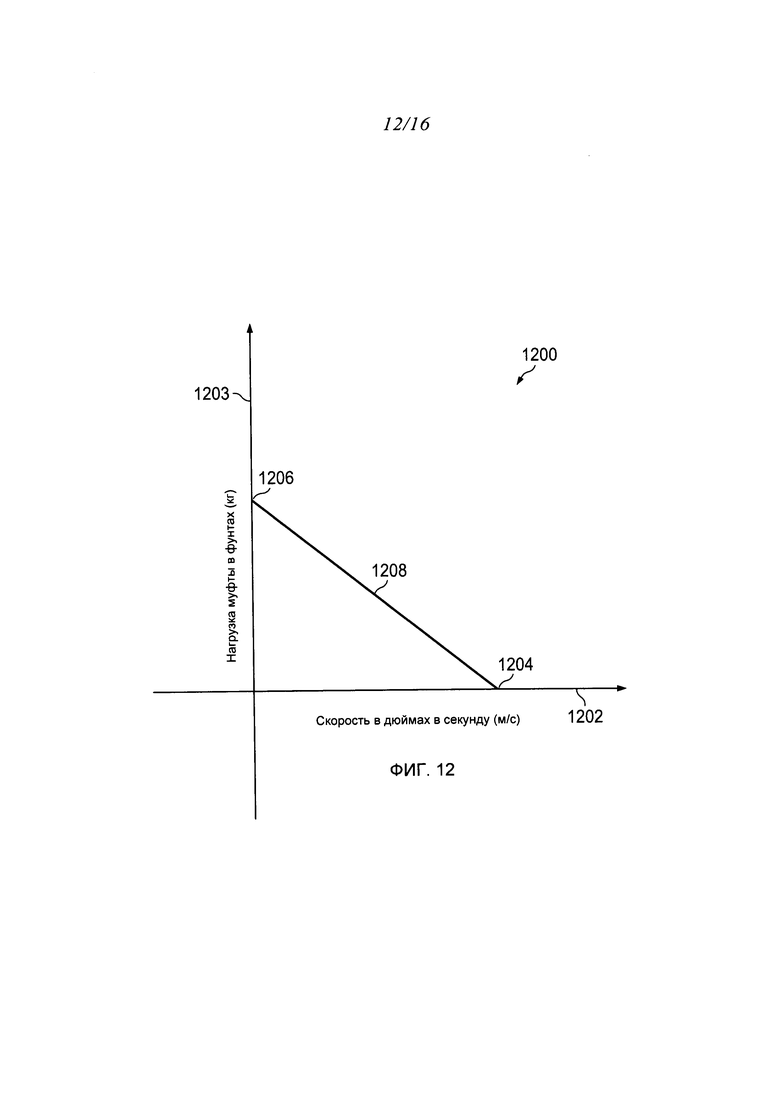
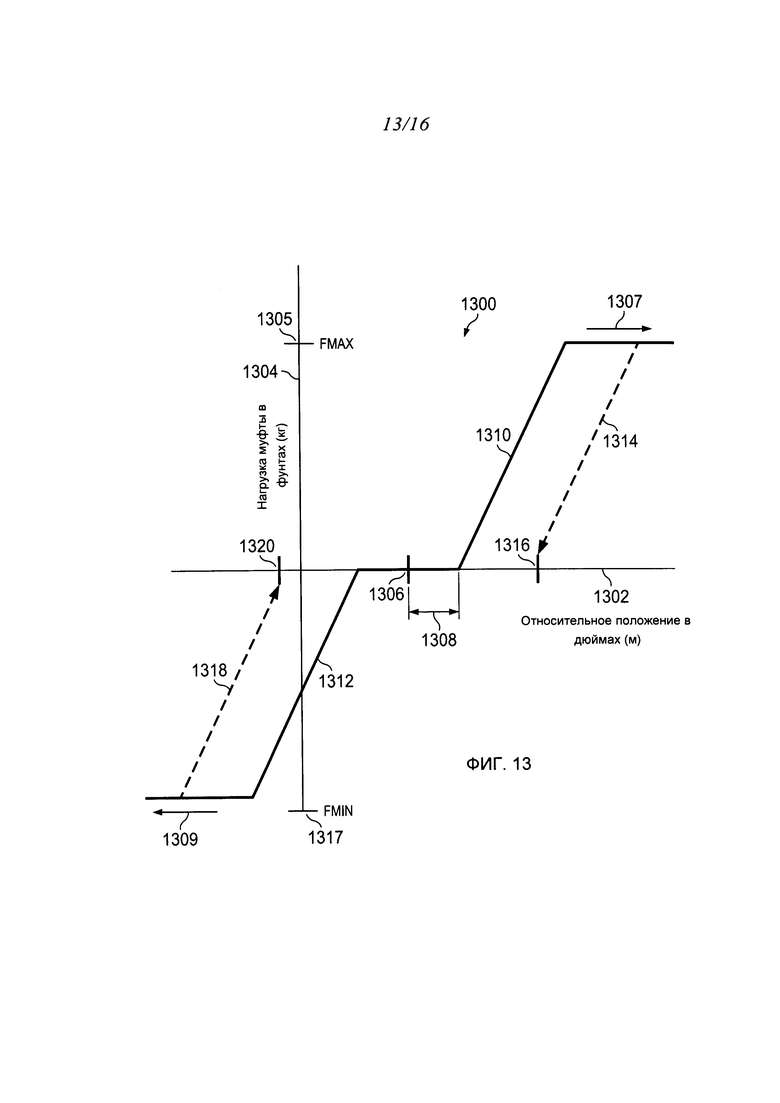
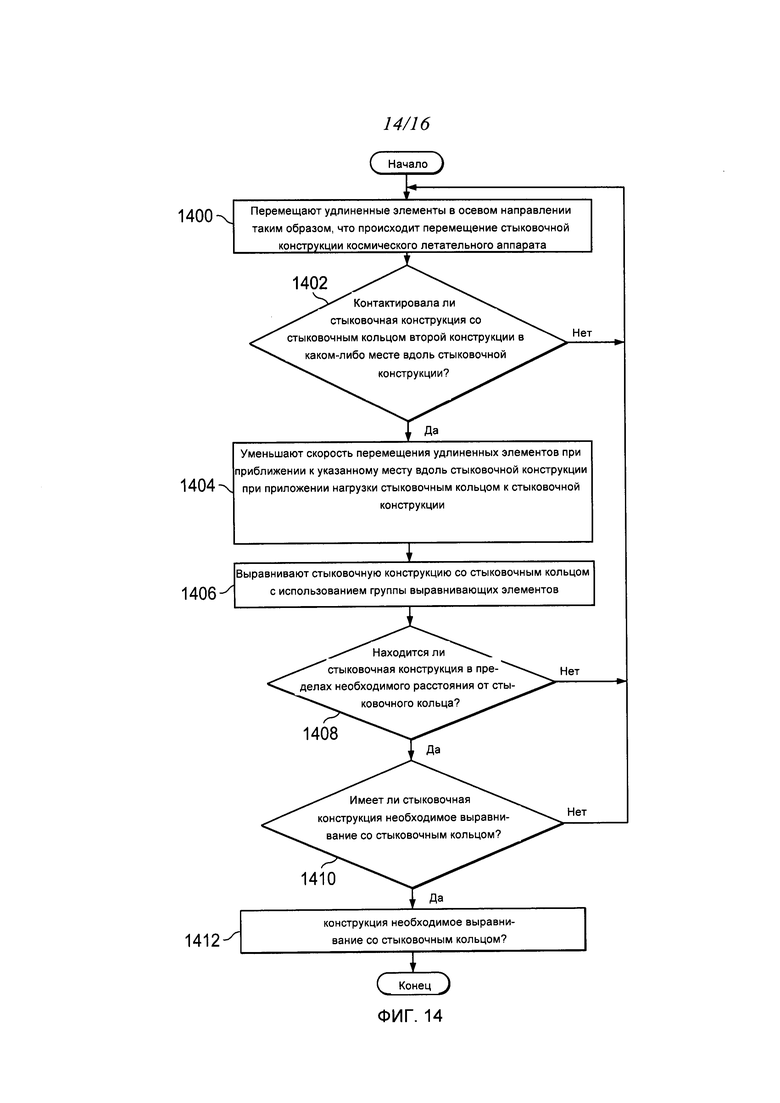
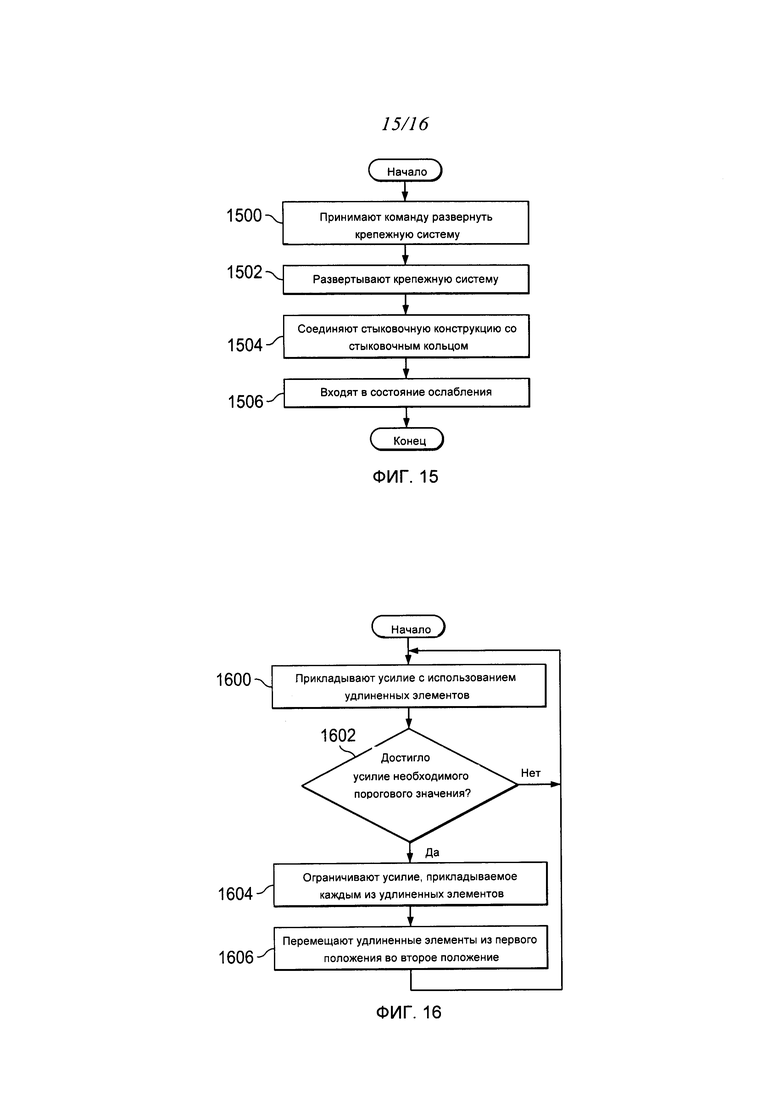
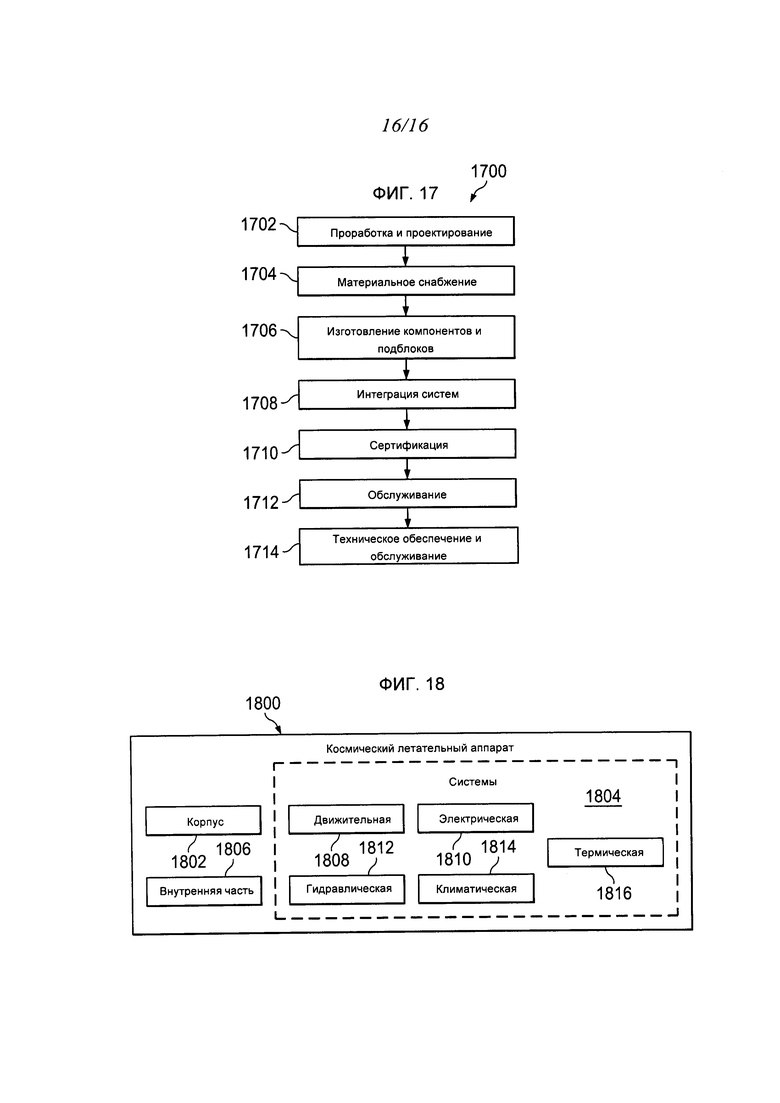
Группа изобретений относится к стыковке космических летательных аппаратов. Стыковочная система (500) содержит захватное кольцо (502), приводные узлы (504) и выравнивающие элементы (508). Узлы (504) представляют собой удлиненные элементы (518), шарнирно соединенные в местах (514) соединения с опорной пластиной (512) и имеющие возможность независимого перемещения. Системы управления усилиями выполнены с возможностью пассивно (механическими средствами, например, муфтой) ограничивать усилие, прикладываемое к каждому из удлиненных элементов (518) при его нагружении со стороны объекта, стыкуемого с системой (500). Техническим результатом является упрощение системы управления стыковкой, повышение её надёжности и снижение массы стыковочных средств. 2 н. и 12 з.п. ф-лы, 18 ил.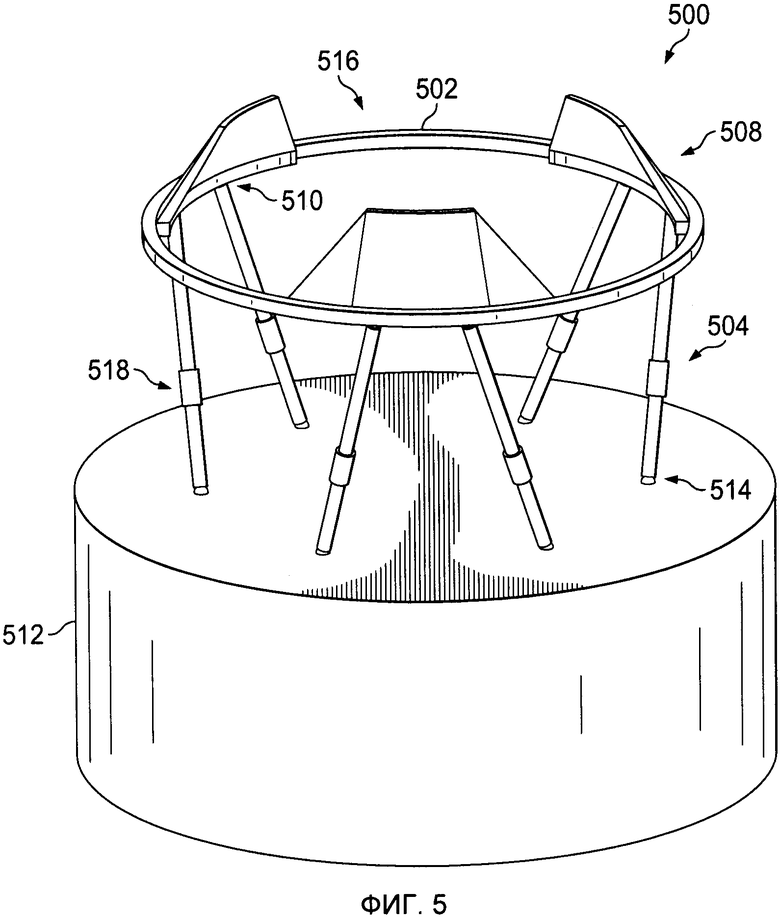
1. Устройство для стыковки космического летательного аппарата, содержащее:
удлиненные элементы, связанные со стыковочной конструкцией космического летательного аппарата,
перемещающие системы, выполненные с возможностью перемещения удлиненных элементов в осевом направлении с обеспечением перемещения стыковочной конструкции космического летательного аппарата, причем каждый из удлиненных элементов совершает независимое перемещение, и
системы управления усилиями, соединяющие перемещающие системы с удлиненными элементами и выполненные с возможностью ограничения усилия, прикладываемого перемещающими системами к каждому из удлиненных элементов, необходимым пороговым значением во время перемещения удлиненных элементов,
причем системы управления усилиями выполнены с возможностью пассивно ограничивать усилие, прикладываемое перемещающими системами к каждому из удлиненных элементов при приложении к нему нагрузки второй конструкцией.
2. Устройство по п. 1, в котором стыковочная конструкция соединяет космический летательный аппарат со второй конструкцией, выбранной как одна из следующих: стыковочное кольцо, космическая станция, спутник, космический летательный аппарат.
3. Устройство по любому из пп. 1 и 2, дополнительно содержащее:
крепежную систему, выполненную с возможностью скрепления стыковочной конструкции со второй конструкцией.
4. Устройство по любому из пп. 1 и 2, в котором стыковочная конструкция представляет собой захватное кольцо.
5. Устройство по любому из пп. 1 и 2, в котором удлиненные элементы выполнены с возможностью перемещения стыковочной конструкции с несколькими степенями свободы.
6. Устройство по любому из пп. 1 и 2, в котором перемещающие системы выполнены с возможностью работы в состоянии, выбранном как по меньшей мере одно из следующих: выдвижение, ослабление и втягивание.
7. Устройство по любому из пп. 1 и 2, в котором стыковочная конструкция имеет область сопряжения и группу выравнивающих элементов.
8. Устройство по любому из пп. 1 и 2, в котором каждая из систем управления усилиями содержит по меньшей мере одно из следующего: скользящая муфта сцепления, гидравлическая муфта сцепления, электромагнитная муфта сцепления, электромагнитный двигатель, программное обеспечение или электрический регулятор.
9. Устройство по любому из пп. 1 и 2, в котором каждая из перемещающих систем содержит двигатель, выполненный с возможностью перемещения соответствующего удлиненного элемента с заданной посредством команды скоростью.
10. Устройство по п. 9, в котором двигатель выполнен с возможностью уменьшения скорости перемещения соответствующего удлиненного элемента в зависимости от нагрузки, приложенной к указанному соответствующему удлиненному элементу.
11. Устройство по п. 9, в котором система управления усилиями в системах управления усилиями содержит скользящую муфту сцепления, выполненную с возможностью скользящего перемещения, когда усилие достигает необходимого порогового значения, таким образом, что соответствующий удлиненный элемент совершает перемещение из первого положения во второе положение.
12. Способ стыковки космического летательного аппарата, согласно которому:
перемещают удлиненные элементы в осевом направлении таким образом, что происходит перемещение стыковочной конструкции космического летательного аппарата, причем каждый из удлиненных элементов совершает независимое перемещение, и
ограничивают усилие, прикладываемое перемещающими системами к каждому из удлиненных элементов, необходимым пороговым значением во время перемещения удлиненных элементов, причем
ограничение усилия включает пассивное ограничение усилия, прикладываемого перемещающими системами к каждому из удлиненных элементов при приложении к нему нагрузки второй конструкцией.
13. Способ по п. 12, согласно которому дополнительно соединяют стыковочную конструкцию со второй конструкцией с использованием крепежной системы.
14. Способ по пп. 12 и 13, согласно которому дополнительно уменьшают скорость перемещения двигателя на основании нагрузки, приложенной к соответствующему удлиненному элементу.
| US 7543779 B1, 09.06.2009 | |||
| US 6543076 B1, 08.04.2003 | |||
| US 4860975 А, 29.08.1989 | |||
| US 4809936 A, 07.03.1989 | |||
| АНДРОГИННОЕ СТЫКОВОЧНОЕ УСТРОЙСТВО КОСМИЧЕСКИХ КОРАБЛЕЙ | 2005 |
|
RU2291821C1 |
| В.В.Сыромятников | |||
| Стыковочные устройства космических кораблей | |||
| М | |||
| Машиностроение | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Скоропечатный станок для печатания со стеклянных пластинок | 1922 |
|
SU35A1 |

