ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение в целом относится к изготовлению композитных конструкций и, в частности, к контролированию композитных заготовок во время изготовления. Более конкретно настоящее изобретение относится к способу и устройству для идентифицирования загрязняющих веществ на композитных заготовках перед отверждением этих композитных заготовок для формирования композитных конструкций.
Воздушные летательные аппараты проектируют и изготавливают с все большим содержанием композитных материалов. Композитные материалы используются в воздушном летательном аппарате для уменьшения его веса. Этот уменьшенный вес улучшает технические параметры, такие как грузоподъемность и топливная эффективность. Кроме того, композитные материалы обеспечивают больший срок службы различных компонентов в воздушном летательном аппарате.
Композитные материалы представляют собой жесткие, легкие материалы, созданные посредством комбинирования двух или большего количества функциональных компонентов. Например, композитный материал может содержать усиливающие волокна, связанные в матрице из полимерной смолы. Волокна могут быть однонаправленными или могут иметь форму тканого полотна или ткани. Для формирования композитного материала производят размещение волокон и смол.
Кроме того, использование композитных материалов для создания аэрокосмических композитных конструкций может обеспечивать возможность изготовления участков воздушного летательного аппарата крупными кусками или секциями. Например, фюзеляж в воздушном летательном аппарате может быть выполнен из цилиндрических секций для формирования фюзеляжа воздушного летательного аппарата. Другие примеры включают, без ограничения, секции крыльев, соединенные для формирования крыла, или секции стабилизатора, соединенные для формирования стабилизатора.
При изготовлении композитных конструкций слои композитного материала обычно укладывают на рабочий орган. Слои могут быть образованы из волокон в листах. Эти листы могут иметь форму тканей, ленты, жгутов волокна или другие подходящие формы. В некоторых случаях листы могут быть пропитаны смолой. Эти типы листов обычно называют препрегом.
Различные слои препрега могут быть уложены в различных ориентациях, и различные множества слоев могут быть использованы в зависимости от толщины изготовляемой композитной конструкции. Эти слои могу быть уложены вручную или с использованием автоматизированного оборудования для производства слоистых материалов, такого как машина для производства слоистых лент или система для укладки волокон.
После укладки различных слоев на рабочий орган их консолидируют и отверждают, подвергая их воздействию температуры и давления и формируя, таким образом, готовую композитную конструкцию. После этого композитная конструкция может быть проверена для определения наличия несоответствий. Контроль может быть проведен с использованием рентгеновских систем контроля, ультразвуковых систем контроля и других типов систем неразрушающего контроля.
При идентифицировании несоответствия композитная конструкция может быть доработана. В некоторых случаях несоответствие может приводить к отбраковыванию композитной конструкции и необходимости изготовления новой композитной конструкции. Примеры несоответствий, которые могут иметь место в композитной конструкции, включают пустоты, пористость, отслоение, остатки посторонних предметов (FOD) и другие типы несоответствий.
Доработка деталей или отбраковывание и изготовление композитных конструкций может вызывать задержку окончания изготовления воздушного летательного аппарата с использованием композитных конструкций. Кроме того, доработка или отбраковывание деталей может приводить к нежелательному увеличению затрат на изготовление воздушного летательного аппарата.
В связи с этим было бы желательным иметь способ и устройство, учитывающие по меньшей мере одну из рассмотренных выше проблем, а также другие возможные проблемы.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В одном иллюстративном варианте реализации изобретения представлен способ контролирования композитной заготовки. Ответный сигнал на электромагнитное излучение, направленное к поверхности композитной заготовки, разделяют на множество длин волн для каждого участка из множества участков на поверхности композитной заготовки. На поверхности композитной заготовки идентифицируют совокупность загрязняющих веществ на основе упомянутого множества длин волн для указанного каждого участка из упомянутого множества участков. Двухмерное изображение поверхности композитной заготовки генерируют с совокупностью графических индикаторов, указывающих на совокупность загрязняющих веществ, идентифицированных на основе упомянутого множества длин волн для указанного каждого участка из упомянутого множества участков на поверхности композитной заготовки.
Еще в одном иллюстративном варианте реализации изобретения представлен способ контролирования рабочего органа для укладки слоев композитного материала. Ответный сигнал на электромагнитное излучение, направленное к поверхности рабочего органа, разделяют на множество длин волн для каждого участка из множества участков на поверхности рабочего органа перед укладкой слоев композитного материала на поверхность рабочего органа. На основе упомянутого множества длин волн для указанного каждого участка из упомянутого множества участков на поверхности рабочего органа идентифицируют совокупность загрязняющих веществ. Двухмерное изображение поверхности рабочего органа генерируют с совокупностью графических индикаторов, указывающих на совокупность загрязняющих веществ, идентифицированных на основе упомянутого множества длин волн для указанного каждого участка из упомянутого множества участков на поверхности рабочего органа.
Еще в одном иллюстративном варианте реализации изобретения представлен способ контролирования композитного материала. Ответный сигнал на электромагнитное излучение, направленное к поверхности композитного материала, разделяют на множество длин волн для каждого участка из множества участков на поверхности композитного материала. Для композитного материала идентифицируют совокупность несоответствий на основе упомянутого множества длин волн для указанного каждого участка из упомянутого множества участков. Генерируют двухмерное изображение композитного материала с совокупностью графических индикаторов, указывающих на совокупность несоответствий, идентифицированных на основе упомянутого множества длин волн для указанного каждого участка из упомянутого множества участков на поверхности композитного материала.
Еще в одном иллюстративном варианте реализации изобретения устройство содержит спектральную сенсорную систему и анализатор. Спектральная сенсорная система выполнена с возможностью разделения ответного сигнала на электромагнитное излучение, направленное к поверхности композитной заготовки, на множество длин волн и генерирования данных на основе упомянутого множества длин волн электромагнитного излучения. Анализатор выполнен с возможностью вызывать генерирование спектральной сенсорной системой указанных данных на основе ответного сигнала после укладки множества слоев композитного материала для композитной заготовки и перед отверждением упомянутого множества слоев композитного материала. Анализатор, кроме того, выполнен с возможностью генерирования двухмерного изображения поверхности композитной заготовки с совокупностью графических индикаторов, указывающих на совокупность загрязняющих веществ, идентифицированных на основе упомянутого множества длин волн для каждого участка из множества участков на поверхности композитной заготовки.
Указанные признаки и функции могут быть реализованы независимо в различных вариантах осуществления настоящего изобретения или могут быть скомбинированы с получением других вариантов осуществления изобретения, дополнительные подробности которых могут быть очевидными при обращении к последующему описанию и чертежам.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Признаки иллюстративных вариантов реализации изобретения, обеспечивающие новизну по сравнению с уровнем техники, изложены в прилагаемой формуле изобретения.
При этом иллюстративные варианты реализации изобретения, а также предпочтительный режим их применения, дополнительные цели и преимущества будут лучше поняты из следующего подробного описания иллюстративного варианта реализации изобретения при рассмотрении вместе с сопроводительными чертежами, на которых:
фигура 1 представляет собой иллюстрацию производственной среды в соответствии с иллюстративным вариантом реализации изобретения;
фигура 2 представляет собой иллюстрацию структурной схемы среды обеспечения контроля в соответствии с иллюстративным вариантом реализации изобретения;
фигура 3 представляет собой иллюстрацию структурной схемы системы формирования изображений в соответствии с иллюстративным вариантом реализации изобретения;
фигура 4 представляет собой иллюстрацию структурной схемы данных в соответствии с иллюстративным вариантом реализации изобретения;
фигура 5 представляет собой иллюстрацию системы формирования изображений в соответствии с иллюстративным вариантом реализации изобретения;
фигура 6 представляет собой иллюстрацию системы формирования изображений в соответствии с иллюстративным вариантом реализации изобретения;
фигура 7 представляет собой иллюстрацию системы формирования изображений в соответствии с иллюстративным вариантом реализации изобретения;
фигура 8 представляет собой иллюстрацию спектральной сенсорной системы в соответствии с иллюстративным вариантом реализации изобретения;
фигура 9 представляет собой иллюстрацию двухмерного изображения с графическими индикаторами в соответствии с иллюстративным вариантом реализации изобретения;
фигура 10 представляет собой иллюстрацию блок-схемы процесса контролирования композитной заготовки в соответствии с иллюстративным вариантом реализации изобретения;
фигура 11 представляет собой иллюстрацию блок-схемы процесса идентифицирования совокупности загрязняющих веществ на основе множества длин волн в соответствии с иллюстративным вариантом реализации изобретения;
фигура 12 представляет собой иллюстрацию блок-схемы процесса генерирования двухмерного изображения поверхности композитной заготовки с совокупностью графических индикаторов, указывающих на совокупность загрязняющих веществ в соответствии с иллюстративным вариантом реализации изобретения;
фигура 13 представляет собой иллюстрацию блок-схемы процесса контролирования композитной заготовки в соответствии с иллюстративным вариантом реализации изобретения;
фигура 14 представляет собой иллюстрацию системы обработки данных в соответствии с иллюстративным вариантом реализации изобретения;
фигура 15 представляет собой иллюстрацию способа изготовления воздушного летательного аппарата и его текущего ремонта в соответствии с иллюстративным вариантом реализации изобретения; и
фигура 16 представляет собой иллюстрацию воздушного летательного аппарата, в котором может быть осуществлен иллюстративный вариант реализации изобретения.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
В иллюстративных вариантах реализации изобретения рассматриваются и учитываются различные соображения. Например, в иллюстративных вариантах реализации изобретения рассматривается и учитывается, что несоответствия могут быть вызваны загрязняющими веществами во время изготовления композитной конструкции. Например, по мере укладки слоев композитного материала на заготовке, на поверхности одного из указанных слоев композитного материала могут появляться загрязняющие вещества. Эти загрязняющие вещества уже могут присутствовать на слое композитного материала, появляться из производственной среды при размещении указанного слоя на заготовке или поступать из какого-либо иного источника.
При размещении дополнительных слоев композитного материала поверх слоев, на которых присутствуют загрязняющие вещества, эти загрязняющие вещества оказываются между слоями композитного материала. В иллюстративных вариантах реализации изобретения также рассматривается и учитывается, что загрязняющие вещества могут присутствовать на поверхности рабочего органа, на котором производят укладку слоев композитного материала. Загрязняющие вещества могут прилипать к слою композитного материал, который размещают на поверхности рабочего органа. Когда загрязняющие вещества имеют форму жидкостей, эти загрязняющие вещества пропитывают один или более слоев композитного материала.
Загрязняющие вещества могут приводить к возникновению несоответствий при отверждении композитной заготовки с этими слоями. Например, без ограничения, загрязняющие вещества могут привести к появлению в нежелательных количествах по меньшей мере одного из следующего: пустоты, пористость, отслоения и другие типы несоответствий. При использовании в настоящем документе выражение "по меньшей мере одно из следующего", употребляемое со списком объектов, означает, что могут быть использованы различные комбинации из одного или большего количества приведенных в списке объектов и только один из объектов, указанных в списке, может быть необходим.
Например, выражение "по меньшей мере одно из следующего: объект А, объект В и объект С" может включать, без ограничения, объект А или объект А и объект В. Этот пример также может включать объект А, объект В и объект С или объект В и объект С.
В иллюстративных вариантах реализации изобретения рассматривается и учитывается, что присутствие загрязняющих веществ на поверхности слоев композитного материала, уложенных на композитной заготовке для композитной конструкции, может быть в виде, например, без ограничения, частиц, мусора, жидкостей, влаги и других типов нежелательных загрязняющих веществ. В иллюстративных вариантах реализации изобретения рассматривается и учитывается, что идентифицирование присутствия этих загрязняющих веществ на поверхности слоев композитного материала перед отверждением указанных слоев может уменьшить объем доработок и количество отбракованных композитных конструкций. Кроме того, уменьшение количества отбракованных композитных конструкций также приводит к уменьшению количества замен изготовленных композитных конструкций.
В иллюстративных вариантах реализации изобретения также рассматривается и учитывается, что эти загрязняющие вещества часто невидимы невооруженным глазом. Соответственно, контролирование слоев композитных материалов в отношении загрязняющих веществ может оказаться сложнее, чем желательно во время изготовления композитных конструкций из слоев композитных материалов.
Таким образом, иллюстративные варианты реализации изобретения обеспечивают создание способа и устройства для контролирования композитных заготовок. В этих иллюстративных примерах композитная заготовка может представлять собой множество слоев композитного материала, уложенных для композитной конструкции. При проведении обработки можно направлять электромагнитное излучение к поверхности композитной заготовки. Ответный сигнал на электромагнитное излучение, направленное к поверхности композитной заготовки, разделяют на множество длин волн для каждого участка из множества участков на поверхности.
Двухмерное изображение поверхности композитной заготовки генерируют с совокупностью графических индикаторов, указывающих на совокупность загрязняющих веществ, идентифицированных на основе упомянутого множества длин волн для каждого участка из совокупности участков. Выражение "совокупность" при использовании в настоящем документе в отношении предметов означает нулевое множество, один или большее количество предметов. Например, совокупность загрязняющих веществ представляет собой нулевое множество или большее количество загрязняющих веществ. Иными словами, совокупность загрязняющих веществ иногда может быть пустой совокупностью, если загрязняющих веществ не идентифицировано. Двухмерное изображение может быть использовано для определения присутствия загрязняющих веществ и для идентифицирования того, где должно быть предпринято корректирующее действие, если присутствуют загрязняющие вещества.
На фигуре 1 изображена иллюстрация производственной среды в соответствии с иллюстративным вариантом реализации изобретения. В этом показанном примере производственная среда 100 включает в себя установку 102 для укладки композитных материалов и установку 104 для укладки композитных материалов.
Установка 102 для укладки композитных материалов и установка 104 для укладки композитных материалов являются установками, на которых могут быть уложены слои композитного материала при изготовлении композитных конструкций. В этом иллюстративном примере система 106 для укладки композитных материалов может укладывать слои композитного материала 108 на рабочий орган 110 для композитной заготовки 112 на установке 102 для укладки композитных материалов. В этом иллюстративном примере система 106 для укладки композитных материалов представляет собой роботизированную руку, на которой выполнен исполнительный орган для укладки слоев композитного материала 108.
В этих иллюстративных примерах контролирование поверхности 114 слоев 116 в слоях композитного материала 108 выполняют перед отверждением слоев композитного материала 108. В этом иллюстративном примере контроль может быть осуществлен с использованием системы 118 контроля.
Система 118 контроля включает корпус 120, систему 122 формирования изображений, источник 124 света и компьютер 126. Корпус 120 выполнен с возможностью перемещения на инструментальном комплексе 128. В этом иллюстративном примере инструментальный комплекс 128 включает в себя систему 130 направляющих элементов и корпус 120. Корпус 120 в инструментальном комплексе 128 содержит систему 122 формирования изображений и источник 124 света.
Источник 124 света выполнен с возможностью направления света к участкам на поверхности 114 композитной заготовки 112. В частности, свет направляют к поверхности 114 слоя 116 в слоях композитного материала 108, которые формируют композитную заготовку 112.
Система 122 формирования изображений выполнена с возможностью получения ответного сигнала на свет, направленный источником 124 света на участки на поверхности 114 композитной заготовки 112. Система 122 формирования изображений выполнена с возможностью разделения ответного сигнала для каждого участка на поверхности 114 на множество длин волн. Эти данные отправляют на компьютер 126. Иными словами, ответный сигнал может быть обнаружен для каждого участка и множества длин волн, сгенерированных для этого конкретного участка на основе обнаруженного ответного сигнала. В этом иллюстративном примере данные отправляют от системы 122 формирования изображений на компьютер 126 по беспроводной линии связи 132.
Компьютер 126 производит идентификацию любых загрязняющих веществ, которые могут присутствовать на этих участках, с использованием указанных данных. Компьютер 126 выполнен с возможностью генерирования двухмерного изображения поверхности 114. В иллюстративных примерах двухмерное изображение может быть двухмерной спектрограммой ответного сигнала поверхности 114. Изображение может включать в себя графические индикаторы, указывающие на загрязняющие вещества, идентифицированные с использованием данных для каждого из участков.
Это изображение может быть использовано оператором 134 для идентифицирования любых загрязняющих веществ, которые могут находиться на поверхности 114 композитной заготовки 112. Кроме того, указанное изображение также может быть использовано для идентифицирования тех участков, в которых загрязняющие вещества находятся на поверхности 114 композитной заготовки 112.
В этих иллюстративных примерах эту идентификацию загрязняющих веществ выполняют перед отверждением композитной заготовки 112. Таким образом, загрязняющие вещества могут быть удалены с композитной заготовки 112. Например, загрязняющие вещества могут быть частицами, которые удаляют. В других примерах, если загрязняющие вещества не могут быть удалены из композитной заготовки 112, один или более слоев композитного материала 108 могут быть замещены таким образом, что загрязняющих веществ больше нет.
Еще в одном иллюстративном примере установка 104 для укладки композитных материалов включает в себя рабочий орган 136 и систему 138 для укладки композитных материалов. В этом иллюстративном примере система 138 для укладки композитных материалов включает в себя инструментальный комплекс, на котором блок для укладки композитных материалов может перемещаться относительно рабочего органа 136 для укладки слоев композитного материала на рабочий орган 136.
В этом иллюстративном примере система 140 контроля включает в себя систему 142 формирования изображений, связанную с роботизированной рукой 144 и источник 146 света, связанный с роботизированной рукой 148.
Роботизированная рука 144 и роботизированная рука 148 формируют инструментальный комплекс 150 для системы 140 контроля в этом иллюстративном примере. Система 140 контроля также включает в себя компьютер 126.
Когда один компонент "связан" еще с одним компонентом, то связь в этих показанных примерах является физической связью. Например, первый компонент, система 142 формирования изображений может считаться связанным со вторым компонентом, роботизированной рукой 144, посредством прикрепления ко второму компоненту, скрепления со вторым компонентом посредством связующего, установке на втором компоненте, приваривания ко второму компоненту, скрепления со вторым компонентом и/или присоединения ко второму компоненту каким-либо иным подходящим образом. Первый компонент также может быть присоединен ко второму компоненту с использованием третьего компонента. Первый компонент может также считаться связанным со вторым компонентом посредством формирования в виде части и/или удлинения второго компонента.
Роботизированная рука 148 перемещает источник 146 света для направления света различным участкам на поверхности 152 рабочего органа 136 в этих иллюстративных примерах. Система 142 формирования изображений может быть перемещена роботизированной рукой 144, чтобы обнаруживать ответный сигнал на свет, направленный к поверхности 152 рабочего органа 136, для каждого из участков на поверхности 152. Схожим образом, система 142 формирования изображений генерирует данные, содержащие множество длин волн для одного из участков на поверхности 152 на рабочем органе 136.
Эти данные отправляют на компьютер 126 по беспроводной линии связи 154. Компьютер 126 анализирует эти данные для определения присутствия загрязняющих веществ на поверхности 152 рабочего органа 136. Компьютер 126 также выполнен с возможностью генерирования двухмерного изображения поверхности 152 рабочего органа 136. Двухмерное изображение также может включать в себя графические индикаторы, осуществляющие идентифицирование любых загрязняющих веществ, обнаруженных на поверхности 152 рабочего органа 136.
Оператор 156 может использовать это изображение для определения присутствия загрязняющих веществ. Кроме того, оператор 156 может удалять загрязняющие вещества с поверхности 152 рабочего органа 136 перед использованием системы 138 для укладки композитных материалов, чтобы производить укладку композитного материала на рабочем органе 136. Загрязняющие вещества на поверхности 152 рабочего органа 136 могут быть перемещены на один или более слоев композитных материалов, уложенных на поверхности 152. Эти загрязняющие вещества также могут приводить к возникновению несоответствий при отверждении слоев композитных материалов для формирования композитной конструкции.
Посредством контролирования поверхности 152 рабочего органа 136 перед укладкой композитных материалов на поверхность 152 рабочего органа 136, загрязняющие вещества на поверхности 152 рабочего органа 136 могут быть идентифицированы и удалены. В результате, возникновение несоответствий на композитной конструкции, вызываемое загрязняющими веществами на поверхности 152 рабочего органа 136, может быть уменьшено.
Таким образом, могут быть уменьшены проблемы, связанные с загрязняющими веществами, вызывающими несоответствия в композитных конструкциях. Посредством контролирования, осуществляемого перед отверждением композитной заготовки 112, уменьшается вероятность нахождения несоответствий в композитной конструкции, полученной из композитной заготовки 112, по сравнению с используемыми в настоящее время способами изготовления композитных конструкций.
На фигуре 2 изображена иллюстрация структурной схемы среды обеспечения контроля в соответствии с иллюстративным вариантом реализации изобретения. Система 118 контроля и система 140 контроля в производственной среде 100 представляют собой примеры физической реализации компонентов в среде 200 обеспечения контроля согласно фигуре 2.
В этом иллюстративном примере система 202 контроля в среде 200 обеспечения контроля может быть использована для контролирования рабочего органа 204, композитной заготовки 206 или рабочего органа 204 и композитной заготовки 206.
В этих иллюстративных примерах множество слоев композитных материалов 208 формирует композитную заготовку 206. Множество слоев композитных материалов 208 укладывают на рабочий орган 204 во время изготовления композитной заготовки 206.
В этих иллюстративных примерах совокупность загрязняющих веществ 210 может иметь место на поверхности 212 композитной заготовки 206. Иными словами, совокупность загрязняющих веществ 210 присутствует на поверхности 212 на множестве слоев композитных материалов 208. В этих иллюстративных примерах совокупность загрязняющих веществ 210 присутствует на поверхности 212 слоя композитного материала, который не покрыт еще одним слоем композитного материала из множества слоев композитных материалов 208.
В этих иллюстративных примерах контролирование поверхности 212 множества слоев композитных материалов 208 может быть осуществлено перед отверждением композитной заготовки 206. В частности, это контролирование может быть осуществлено перед размещением дополнительных слоев композитных материалов сверху поверхности 212 множества слоев композитных материалов 208.
Как показано на чертежах, контроль может быть осуществлен с использованием системы 202 контроля, которая в этих иллюстративных примерах выполнена в виде системы 214 неразрушающего контроля. Система 202 контроля может включать в себя систему 216 формирования изображений, источник 218 электромагнитного излучения, инструментальный комплекс 220 и анализатор 222.
Инструментальный комплекс 220 представляет собой аппаратную систему, которая может включать в себя программное обеспечение. Инструментальный комплекс 220 может быть стационарным или может быть мобильным.
Система 216 формирования изображений и источник 218 электромагнитного излучения могут быть связаны с инструментальным комплексом 220. В некоторых иллюстративных примерах анализатор 222 также может быть связан с инструментальным комплексом 220. Инструментальный комплекс 220 служит опорой для этих и каких-либо других компонентов.
Помимо этого, инструментальный комплекс 220 может быть выполнен с возможностью перемещения компонентов, связанных с инструментальным комплексом 220, таких как, например, система 216 формирования изображений и источник 218 электромагнитного излучения. Как показано на чертежах, инструментальный комплекс 220 может включать в себя систему 223 обеспечения перемещения, выполненную с возможностью перемещения по меньшей мере одного из следующего: инструментальный комплекс 220 и композитная заготовка 206.
Источник 218 электромагнитного излучения представляет собой аппаратное устройство и может включать в себя программное обеспечение. Источник 218 электромагнитного излучения выполнен с возможностью генерирования электромагнитного излучения 224. Источник 218 электромагнитного излучения выполнен с возможностью направления электромагнитного излучения 224 к множеству участков 226 на поверхности 212 композитной заготовки 206.
В этих иллюстративных примерах источник 218 электромагнитного излучения может иметь различные формы. Например, без ограничения, источник 218 электромагнитного излучения может быть лазерной системой, галогенной системой, светодиодной системой, системой на основе дуги в атмосфере ксенона, диодной лазерной системой, лазерной системой с перестройкой частоты, системой на основе кварцевой лампы и другими подходящими типами источников электромагнитного излучения. Электромагнитное излучение 224 может быть по меньшей мере одним из следующего: видимый свет, инфракрасный свет и электромагнитное излучение других подходящих типов.
Система 216 формирования изображений представляет собой аппаратное устройство и может включать в себя программное обеспечение. Система 216 формирования изображений выполнена с возможностью получения и обработки ответного сигнала 228. Ответный сигнал 228 представляет собой ответный сигнал на электромагнитное излучение 224, направленное на множество участков 226 на поверхности 212 композитной заготовки 206. Ответный сигнал 228 на электромагнитное излучение 224, направленное к поверхности 212 композитной заготовки 206, разделяют на множество длин волн 230 для каждого из множества участков 226.
Данные 232 генерируются системой 216 формирования изображений на основе ответного сигнала 228. Например, данные 232 включают в себя данные, сгенерированные на основе множества длин волн 230, выделенных из ответного сигнала 228 для каждого участка из множества участков 226. В этих иллюстративных примерах данные 232 включают в себя интенсивность для каждой длины волн из множества длин волн 230 для конкретного участка из множества участков 226. Часть данных 232 для конкретного участка в множестве участков 226 формирует сигнатуру в этих примерах. Таким образом, множество сигнатур 233 может быть представлено для множества участков 226 в данных 232.
Данные 232 отправляют из системы 216 формирования изображений в анализатор 222 по линии связи 229. Линия связи 229 может быть проводной линией связи, беспроводной линией связи, оптической линией связи, или каким-либо другим подходящим типом линии связи.
Анализатор 222 представляет собой аппаратное устройство и может включать в себя программное обеспечение. В этих иллюстративных примерах анализатор 222 может быть реализован с использованием компьютерной системы 238. Компьютерная система 238 образована множеством компьютеров. Если присутствует больше, чем один компьютер, эти компьютеры могут быть соединены друг с другом с использованием средства связи, такого как сеть.
Анализатор 222 выполнен с возможностью генерирования изображения 234 с использованием данных 232. Изображение 234 может быть воспроизведено компьютерной системой 238. Изображение 234 может быть воспроизведено с использованием дисплейного устройства, такого как жидкокристаллический дисплей или какого-либо другого подходящего типа дисплейного устройства. В этих иллюстративных примерах изображение 234 имеет форму двухмерного изображения 236.
В этих иллюстративных примерах анализатор 222 производит идентификацию совокупности загрязняющих веществ 210 на поверхности 212 композитной заготовки 206. Как рассмотрено выше, совокупность загрязняющих веществ 210 может представлять собой пустую совокупность, в которой отсутствуют загрязняющие вещества.
Анализатор 222 производит идентификацию совокупности загрязняющих веществ 210 с использованием базы данных 240 сигнатур. Например, анализатор 222 сравнивает данные 232 с базой данных 240 сигнатур для определения присутствия загрязняющих веществ. Более конкретно, множество сигнатур 233 сравнивают с сигнатурами 241 в базе данных 240 сигнатур. В этих иллюстративных примерах база данных 240 сигнатур является базой данных длин волн для известных загрязняющих веществ.
Сигнатуры 241 содержат информационные материалы. Эти материалы могут включать по меньшей мере одно из следующего: загрязняющие вещества, ожидаемые композитные материалы и другие материалы. В этих иллюстративных примерах сигнатура материала содержит множество интенсивностей для множества длин волн, которые присутствуют для загрязняющего вещества. Интенсивности для различных длин волн для материала формируют сигнатуры для этого конкретного материала. В этих иллюстративных примерах указанные интенсивности при различных длинах волн уникальны для материала.
В результате, интенсивности для упомянутого множества длин волн 230 в данных 232 могут быть сравнены с сигнатурами 241 для определения присутствия загрязняющего вещества. База данных 240 сигнатур также может быть использована для идентифицирования материалов, присутствие которых ожидается в композитной заготовке 206.
Таким образом, анализатор 222 может также осуществлять идентифицирование типов композитных материалов, используемых в множестве слоев композитных материалов 208. Таким образом, анализатор 222 может также определять, представляет ли собой множество слоев композитных материалов 208 необходимый тип композитных материалов для использования в композитной заготовке 206.
В этих иллюстративных примерах совокупность графических индикаторов 242 включена в изображение 234. Совокупность графических индикаторов 242 используют для идентифицирования совокупности загрязняющих веществ 210 для каждого участка из множества участков 226 на поверхности 212 композитной заготовки 206. Иными словами, каждый участок в множестве участков 226 может не иметь загрязняющих веществ или иметь одно или большее количество загрязняющих веществ.
В этих иллюстративных примерах совокупность графических индикаторов 242 включена в множество участков 244 в изображении 234, соответствующих количеству участков 226 на поверхности 212 композитной заготовки 206. Иными словами, графический индикатор в совокупности графических индикаторов 242, используемый для идентифицирования загрязняющего вещества в совокупности загрязняющих веществ 210, может быть размещен в участке внутри множества участков 244 в изображении 234 таким образом, что это участок соответствует участку в множестве участков 226 на поверхности 212, на которой присутствует указанное загрязняющее вещество.
Иными словами, размещение совокупности графических индикаторов 242 в множестве участков 244 выполняют таким образом, что оператор может идентифицировать указанные соответствующие участки в множестве участков 226, когда он смотрит на поверхность 212 композитной заготовки 206. Кроме того, совокупность графических индикаторов 242 также может включать в себя графические индикаторы, которые указывают на отсутствие загрязняющего вещества на поверхности 212 в некоторых иллюстративных примерах.
Помимо этого, в некоторых иллюстративных примерах анализатор 222 может проецировать изображение 234 на поверхность 212 композитной заготовки 206. Это проецирование изображения 234 может быть осуществлено системой 216 формирования изображений. Проецирование изображения 234 на поверхность 212 композитной заготовки 206 происходит таким образом, что совокупность графических индикаторов 242 отображается на совокупности загрязняющих веществ 210 на поверхности 212 композитной заготовки 206. В этих иллюстративных примерах совокупность графических индикаторов 242 может иметь отношение один к одному таким образом, что графические индикаторы показывают фактический размер загрязняющих веществ в совокупности загрязняющих веществ 210, когда изображение 234 с совокупностью графических индикаторов 242 проецируют на поверхность 212 композитной заготовки 206.
В этих иллюстративных примерах этапы разделения ответного сигнала 228 на множество длин волн 230 для каждого участка из множества участков 226 на поверхности 212, идентифицирования совокупности загрязняющих веществ 210 на основе множества длин волн 230 для каждого участка из множества участков 226 на поверхности 212 и генерирование изображения 234 выполняют, когда множество слоев композитных материалов 208 укладывают для композитной заготовки 206. В частности, эти этапы выполняют перед отверждением композитной заготовки 206 для формирования композитной конструкции 246. В этих иллюстративных примерах композитная конструкция 246 может являться композитной частью воздушного летательного аппарата. Эти этапы могут быть осуществлены каждый раз при укладке одного или большего количества слоев композитных материалов для композитной заготовки 206.
Посредством контролирования поверхности 212 перед отверждением композитной заготовки 206, загрязняющие вещества могут быть обнаружены посредством указанного контроля перед отверждением композитной заготовки 206 для формирования композитной конструкции 246. При идентифицировании загрязняющих веществ перед отверждением композитной заготовки 206 эти загрязняющие вещества могут быть удалены. Удаление загрязняющих веществ может представлять собой, например, удаление частиц, испарение жидкостей или другие подходящие операции. В некоторых иллюстративных примерах загрязняющие вещества могут быть удалены посредством замены одного или более слоев из упомянутого множества слоев композитных материалов 208, на котором или которых идентифицированы загрязняющие вещества.
На фигуре 3 изображена иллюстрация структурной схемы системы формирования изображений в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере компоненты, которые могут быть использованы в системе 216 формирования изображений, как показано на фигуре 2. Как показано на чертежах, система 216 формирования изображений включает в себя спектральную сенсорную систему 300, сенсорную систему 302 датчиков видимого света, направляющую систему 304, проекционный аппарат 306, обрабатывающее устройство 307 и инструментальный комплекс 308.
В этих иллюстративных примерах спектральная сенсорная система 300, сенсорная система 302 датчиков видимого света, направляющая система 304, проекционный аппарат 306 и обрабатывающее устройство 307 связаны с инструментальным комплексом 308. Инструментальный комплекс 308 является конструкцией, которая может иметь различные формы. Например, без ограничения, инструментальный комплекс 308 может представлять собой по меньшей мере одно из следующего: корпус, система направляющих элементов, корпус, роботизированная рука и некоторые другие подходящие типы конструкции. Например, инструментальный комплекс 308 может быть выполнен в виде корпуса, в котором один или более из этих различных компонентов в системе 216 формирования изображений могут быть расположены.
Спектральная сенсорная система 300 представляет собой аппаратную систему и выполнена с возможностью приема ответного сигнала 228 и генерирования данных 232 для множества длин волн 230 по фигуре 2. В этих иллюстративных примерах спектральная сенсорная система 300 выполнена с возможностью генерирования множества длин волн 230 в форме диапазона длин волн. Этот диапазон длин волн может быть непрерывным или может включать в себя промежутки в зависимости от конкретной реализации.
В этом иллюстративном примере спектральная сенсорная система 300 включает в себя фильтр 310 и матрицу 312 датчиков. Фильтр 310 выполнен с возможностью разделения электромагнитного излучения в ответном сигнале 228 на множество длин волн 230. В этих иллюстративных примерах фильтр 310 имеет форму интерференционного фильтра 314.
В этих иллюстративных примерах каждую из указанных длин волн в множестве длин волн 230, выделенных фильтром 310, отправляют на датчик в матрице 312 датчиков. В результате, матрица 312 датчиков генерирует данные на основе множества длин волн 230 на основе ответного сигнала 228 от конкретного участка в множестве участков 244.
В этих иллюстративных примерах направляющая система 304 представляет собой аппаратную систему, которая выполнена с возможностью направления ответного сигнала 228 на фильтр 310. Направляющая система 304 может обусловливать сканирование ответного сигнала 228 через фильтр 310. При сканировании ответного сигнала 228 через фильтр 310 в ответном сигнале 228 фильтром 310 выделяют множество длин волн 230.
Направляющая система 304 может быть образована из компонентов, таких как система 318 зеркал, отверстие 320 и компоненты других подходящих типов. Система 318 зеркал может быть выполнена с возможностью перемещения, чтобы обусловливать сканирование ответного сигнала 228 через фильтр 310. Отверстие 320 может быть, например, отверстием в инструментальном комплексе 308, который обеспечивает возможность направления части ответного сигнала 228, соответствующего участку в множестве участков 244, на фильтр 310.
Сенсорная система 302 датчиков видимого света выполнена с возможностью генерирования изображения данных поверхности 212 композитной заготовки 206 в этих иллюстративных примерах. Сенсорная система 302 датчиков видимого света может быть реализована с использованием любого типа камеры видимого света или компонентов камеры видимого света.
Проекционный аппарат 306 выполнен с возможностью проецирования изображений. В этих иллюстративных примерах проекционный аппарат 306 может быть выполнен с возможностью проецирования изображения 234 на поверхность 212 композитной заготовки 206.
Обрабатывающее устройство 307 представляет собой аппаратное устройство и может включать в себя программное обеспечение. Обрабатывающее устройство 307 выполнено с возможностью управления работой по меньшей мере одного из следующего: спектральная сенсорная система 300, сенсорная система 302 датчиков видимого света, направляющая система 304 и проекционный аппарат 306. Обрабатывающее устройство 307 также может быть выполнено с возможностью обработки части данных 232, сгенерированных системой 216 формирования изображений, перед отправкой данных 232 в анализатор 222. Обрабатывающее устройство 307 может представлять собой процессорный блок, систему на интегральных схемах, компьютер или какое-либо иное подходящее аппаратное устройство. Например, обрабатывающее устройство 307 может осуществлять предварительную обработку данных 232 для удаления шума и временных меток и выполнения других операции сданными 232 перед отправкой данных 232 в анализатор 222.
На фигуре 4 изображена иллюстрация структурной схемы данных в соответствии с иллюстративным вариантом реализации изобретения. На этом чертеже проиллюстрированы примеры информации, которая может присутствовать в данных 232 по фигуре 2. В этом иллюстративном примере данные 232 представляют данные для участка 400. Участок 400 является примером участка в множестве участков 244 по фигуре 2.
Участок 400 представляет собой участок, идентифицированный на поверхности 212 композитной заготовки 206. Участок 400 может быть описан на основе координат. Например, система координат для заготовки может быть использована для идентифицирования участка 400. Конечно, любая подходящая система координат может быть использована для идентифицирования участка 400. Участок 400 может быть идентифицирован множеством различных способов. Например, участок 400 может быть идентифицирован с использованием модели композитной конструкции 246. В частности, эта модель может быть моделью осуществления укладок множества композитных слоев 208. Модель может включать в себя систему координат. Эта система координат может быть использована анализатором 222 для управления системой 216 формирования изображений при выборе участка 400. В этих иллюстративных примерах модель может быть моделью композитной конструкции 246, выполненной с использованием автоматизированного проектирования.
В этом иллюстративном примере участок 400 имеет интенсивности 404 для длин волн 406. Иными словами, каждая длина волн в длинах волн 406 имеет интенсивность среди интенсивностей 404.
В этих иллюстративных примерах интенсивность среди интенсивностей 404 может быть измерена в люксах, представляющих световой поток на единицу площади.
Длины волн 406 представляют собой диапазон длин волн, которые в этих иллюстративных примерах являются непрерывными. Длины волн в длинах волн 406 могут отличаться в зависимости от конкретной реализации. Например, длины волн 406 могут составлять от примерно 500 нанометров до примерно 3600 нанометров. Конечно, другие длины волн могут быть использованы, и в некоторых иллюстративных примерах длины волн могут даже быть прерывными.
В этих иллюстративных примерах интенсивности 404 для длин волн 406 на участке 400 формируют сигнатуру 408 для участка 400. Сигнатура 408 может быть сравнена с известными сигнатурами в базе данных 240 сигнатур для определения присутствия загрязняющего вещества на участке 400 в этих иллюстративных примерах.
Иллюстрация среды 200 обеспечения контроля и различных компонентов согласно фигурам 2-4 не предназначена для введения физических или архитектурных ограничений на способ, которым может быть реализована среда 200 обеспечения контроля. В дополнение к показанным компонентам или вместо них могут быть использованы другие компоненты. Использование некоторых компонентов может быть не нужно. Также для иллюстрации некоторых функциональных компонентов представлены блоки. Один или более из этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены в различных блоках при реализации в иллюстративном варианте осуществления изобретения.
Например, спектральная сенсорная система 300, сенсорная система 302 датчиков видимого света и проекционный аппарат 306 могут быть связаны с различными инструментальными комплексами, а не с одним и тем же инструментальным комплексом. В некоторых иллюстративных примерах обрабатывающее устройство 307 может быть расположено в компьютерной системе 238 на участке на расстоянии от инструментального комплекса 308.
Еще в одном иллюстративном примере система 216 формирования изображений может включать в себя другие компоненты в дополнение к тем, которые проиллюстрированы на фигуре 3. Например, система 216 формирования изображений также может включать в себя систему линз. Система линз может быть выполнена с возможностью фокусирования света, который может быть принят в ответном сигнале 228.
Еще в одном иллюстративном примере композитная заготовка 206 может быть подвергнута обработке для формирования композитной конструкции 246 в иных формах, отличных от композитной части для воздушного летательного аппарата. Например, без ограничений, композитная конструкция 246 может быть частью инструментального комплекса, такого как передвижной инструментальный комплекс, стационарный инструментальный комплекс, конструкция наземного базирования, конструкция морского базирования, конструкция космического базирования. Более конкретно инструментальный комплекс может представляет собой надводный корабль, танк, военное транспортное средство для перевозки личного состава, поезд, космический летательный аппарат, космическую станцию, спутник, подводную лодку, автомобиль, энергетическую установку, мост, дамбу, производственное сооружение, здание и иные подходящие объекты.
На фигуре 5 изображена иллюстрация системы формирования изображений в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, система 500 формирования изображений представляет собой пример физической реализации системы 216 формирования изображений, показанной в блочной форме на фигуре 2 и фигуре 3.
В этом показанном примере система 500 формирования изображений выполнена с возможностью направления электромагнитного излучения 502 в форме когерентного света 504 для сканирования композитной заготовки 506, уложенной на рабочий орган 508. В частности, когерентный свет 504 может быть выполнен с возможностью сканирования в направлении стрелки 510 поперек поверхности 512 композитной заготовки 506. В этом показанном примере композитная заготовка 506 представляет собой композитную заготовку для крыла воздушного летательного аппарата.
В этом иллюстративном примере когерентный свет 504 может покрывать ширину 514 композитной заготовки 506 при перемещении в направлении стрелки 510. В качестве реакции на когерентный свет 504 возвращают ответный сигнал 516 в систему 500 формирования изображений. Как показано на чертежах, ответный сигнал 516 представляет собой ответный сигнал для положения 520 вдоль длины 518 композитной заготовки 506. Ответный сигнал 516 представляет собой ответный сигнал, который может быть разделен на длины волн.
Более конкретно, представлено множество участков вдоль ширины 514 для каждого положения вдоль длины 518 композитной заготовки 506. Например, положение 520 имеет множество участков 522. Каждый участок в множестве участков 522 может отражать когерентный свет 504 таким образом, который приводит к генерированию части ответного сигнала 516. Часть ответного сигнала 516, соответствующая положению в множестве участков 522, разделяют на одну или большее количество длин волн для генерирования данных для этого конкретного участка в множестве участков 522 в положении 520.
В этих иллюстративных примерах когерентный свет 504 может быть направлен системой 500 формирования изображений, когда система 500 формирования изображений неподвижна. Еще в одних иллюстративных примерах система 500 формирования изображений может перемещаться в направлении стрелки 510. В некоторых иллюстративных примерах может иметь место сочетание двух раскрытых приемов, чтобы заставлять когерентный свет 504 сканировать композитную заготовку 506 в направлении стрелки 510 вдоль длины 518 композитной заготовки 506.
На фигуре 6 изображена иллюстрация системы формирования изображений в соответствии с иллюстративным вариантом реализации изобретения. Система 600 формирования изображений представляет собой пример одной реализации системы 216 формирования изображений, показанной в блочной форме на фигуре 2 и фигуре 3. Система 600 формирования изображений содержит источник 602 электромагнитного излучения, направляющую систему 604, спектральную сенсорную систему 606 и корпус 607.
Источник 602 электромагнитного излучения выполнен с возможностью генерирования электромагнитного излучения в форме когерентного света. Источник 602 электромагнитного излучения имеет форму лазерной системы в этом конкретном примере.
Как показано на чертежах, источник 602 электромагнитного излучения генерирует луч когерентного света 620. Луч когерентного света 620 проходит через сканирующее зеркало 610 и отражается от сканирующего зеркала 608 в направлении поверхности 622 композитной заготовки 624.
Сканирующее зеркало 610 выполнено отражающим в одном направлении таким образом, что луч когерентного света 620 может проходить через сканирующее зеркало 610. Сканирующее зеркало 610 может быть полупосеребренным зеркалом.
Как показано на чертежах, сканирующее зеркало 608 выполнено с возможностью направления электромагнитного излучения из источника 602 электромагнитного излучения по направлению композитной заготовки. Однако, альтернативные варианты реализации изобретения могут не включать в себя сканирующее зеркало 608. В альтернативных вариантах реализации изобретения, источник 602 электромагнитного излучения может быть направлен к композитной заготовке. В таких альтернативных вариантах реализации изобретения источник 602 электромагнитного излучения может быть расположен внутри или не внутри корпуса 607 системы 600 формирования изображений. Кроме того, дополнительные оптические или направляющие средства могут применяться в альтернативных вариантах реализации изобретения для управления электромагнитным излучением, направленным к композитной заготовке от источника 602 электромагнитного излучения.
Направляющая система 604 представляет собой пример реализации направляющей системы 304, показанной в блочной форме на фигуре 3. Направляющая система 604 направляет луч когерентного света 620 от источника 602 электромагнитного излучения к поверхности 622 композитной заготовки 624. Направляющая система 604 также направляет ответный сигнал 626 на луч когерентного света 620 от поверхности 622 композитной заготовки 624 к спектральной сенсорной системе 606.
Как показано на чертежах, направляющая система 604 содержит сканирующее зеркало 608 и сканирующее зеркало 610. Однако, в альтернативных вариантах реализации изобретения направляющая система 604 может содержать больше или меньше компонентов. Кроме того, в альтернативных вариантах реализации изобретения направляющая система 604 может включать в себя различные направляющие компоненты, такие как вращающийся многоугольник, вращающийся зеркальный одноугольник или призматический многоугольник.
Как показано на чертежах, сканирующее зеркало 608 присоединено к приводному механизму 612. Приводной механизм 612 управляет положением сканирующего зеркала 608. Приводной механизм 612 может быть реализован с использованием двигателя или другого устройства, которое выполнено с возможностью управления положением сканирующего зеркала 608.
Положение сканирующего зеркала 608 управляет направлением луча когерентного света 620 по направлению к композитной заготовке 624. В результате, перемещение сканирующего зеркала 608 может направлять луч когерентного света 620 к различным участкам на поверхности 622 композитной заготовки 624. Таким образом, сканирующее зеркало 608 может быть перемещено посредством приводного механизма 612 так, что луч когерентного света 620 сканирует поверхность 622 композитной заготовки 624.
Сходным образом, положение сканирующего зеркала 610 обусловливает направление ответного сигнала 626, принятого от композитной заготовки 624. В этих иллюстративных примерах ответный сигнал 626 посредством положения сканирующего зеркала 610 направляют к различным участкам спектральной сенсорной системы 606 в системе 600 формирования изображений.
Сканирующее зеркало 610 присоединено к приводному механизму 614. Приводной механизм 614 управляет положением сканирующего зеркала 610.
Подобно сканирующему зеркалу 608 положение сканирующего зеркала 610 обусловливает направление ответного сигнала 626 на различные участки спектральной сенсорной системы 606 в системе 600 формирования изображений. В частности, ответный сигнал 626 может быть направлен по направлению к различным участкам на спектральной сенсорной системе 606, чтобы вызывать генерирование различных длин волн для конкретного участка на поверхности 622 композитной заготовки 624. В свою очередь, спектральная сенсорная система 606 разделяет ответный сигнал 626 на множество длин волн. Спектральная сенсорная система 606 затем генерирует данные на основе упомянутого множества длин волн, выделенных из ответного сигнала 626.
В одном иллюстративном примере осуществляют регулировку направляющей системы 604 для получения образца от участка на композитной заготовке. Сканирующее зеркало 608 направляющей системы 604 перемещают посредством приводного механизма 612 в идентификационное положение. Идентификационное положение сканирующего зеркала 608 рассчитывают для направления луча когерентного света 620 от источника 602 электромагнитного излучения выбранному участку на поверхности 622 композитной заготовки 624. Сканирующее зеркало 610 направляющей системы 604 перемещают посредством приводного механизма 614 в идентификационное положение. Идентификационное положение сканирующего зеркала 610 рассчитывают для направления ответного сигнала, принятого от сканирующего зеркала 608, к спектральной сенсорной системе 606.
После регулировки направляющей системы 604 источник 602 электромагнитного излучения передает луч когерентного света 620 через сканирующее зеркало 610. Луч когерентного света 620 направляют посредством сканирующего зеркала 608 к участку на композитной заготовке 624, с которого необходимо получить образец.
Ответный сигнал 626 на луч когерентного света 620 от поверхности 622 композитной заготовки 624 направляют посредством сканирующего зеркала 608 к сканирующему зеркалу 610. Сканирующее зеркало 610 направляет ответный сигнал 626 к спектральной сенсорной системе 606. В этом иллюстративном примере ответный сигнал 626 может быть просканирован посредством спектральной сенсорной системы 606 путем перемещения сканирующего зеркала 610 в различные положения при приеме ответного сигнала 626.
Спектральная сенсорная система 606 принимает ответный сигнал, разделяет ответный сигнал на множество длин волн и генерирует данные. Система 600 формирования изображений может затем передавать данные в анализатор, такой как анализатор 222 по фигуре 2.
Как показано на чертежах, система 600 формирования изображений по фигуре 6 осуществляет смену участка композитной заготовки, с которого необходимо получить образец, посредством регулировки направляющей системы 604. Соответственно, в этом иллюстративном примере после получения образца из первого участка композитной заготовки 624 производят идентификацию второго участка композитной заготовки. Сканирующее зеркало 608 регулируют посредством приводного механизма 612 с переводом во второе положение. Второе положение рассчитывают для направления луча когерентного света 620 от источника 602 электромагнитного излучения ко второму участку на поверхности 622 композитной заготовки 624. Подобным образом сканирующее зеркало 610 регулируют для перемещения в различные положения посредством приводного механизма 614, чтобы принимать ответный сигнал от сканирующего зеркала 608 во втором положении. Таким образом, ответный сигнал 626 на луч когерентного света 620, направленного ко второму участку, может быть просканирован посредством спектральной сенсорной системы 606. В этом иллюстративном примере из различных участков на поверхности 622 композитной заготовки 624 получают образцы посредством регулировки направляющей системы 604. В этом иллюстративном примере система 600 формирования изображений остается неподвижной.
Однако смена участка композитной заготовки, с которого необходимо получить образец, может быть осуществлена другими способами. Например, еще в одних иллюстративных примерах вместо регулировки направляющей системы 604 может быть выполнено перемещение системы 600 формирования изображений. В альтернативном варианте реализации изобретения вместо регулировки направляющей системы 604 или перемещения системы 600 формирования изображений может быть выполнено перемещение композитной заготовки 624 относительно системы 600 формирования изображений. В иллюстративных примерах, в которых систему 600 формирования изображений или композитную заготовку 624 перемещают относительно друг друга, направляющая система 604 не обязательно должна быть образована из подвижных компонентов.
На фигуре 7 изображена иллюстрация системы формирования изображений в соответствии с иллюстративным вариантом реализации изобретения. Система 700 формирования изображений представляет собой пример одной реализации системы 216 формирования изображений, показанной в блочной форме на фигуре 2 и фигуре 3. Система 700 формирования изображений содержит направляющую систему 702, спектральную сенсорную систему 704 и корпус 706.
В этом иллюстративном примере внутри корпуса 706 расположена спектральная сенсорная система 704. Направляющая система 702 образована сканирующим зеркалом 708 и отверстием 710. Сканирующее зеркало 708 может быть перемещено в различные положения посредством приводного механизма 712.
Как показано на чертежах, система 700 формирования изображений не включает в себя источник 713 электромагнитного излучения внутри корпуса 706. Вместо этого, источник 713 электромагнитного излучения может находиться в ином месте в системе 700 формирования изображений или являться частью другой системы.
В этом показанном примере ответный сигнал 714 принимают через отверстие 710 в корпусе 706. Ответный сигнал 714 направляют по направлению к спектральной сенсорной системе 704 посредством сканирующего зеркала 708.
В этом иллюстративном примере ответный сигнал 714 может быть направлен по направлению к различным участкам на спектральной сенсорной системе 704 посредством перемещения сканирующего зеркала 708 в различные положения. Ответный сигнал 714 от конкретного участка на поверхности 716 композитной заготовки 718 представляет собой ответный сигнал на электромагнитное излучение 720, направляемое к поверхности 716 композитной заготовки 718. Ответный сигнал 714 выбирают посредством перемещения корпуса 706. В частности, перемещение отверстия 710 по различным участкам на поверхности 716 композитной заготовки 718 используют для выбора участка, для которого в этих иллюстративных примерах принимают ответный сигнал 714.
На фигуре 8 изображена иллюстрация спектральной сенсорной системы в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере спектральная сенсорная система 800 представляет собой пример физической реализации спектральной сенсорной системы 300, показанной в блочной форме на фигуре 3. В этом иллюстративном примере спектральная сенсорная система 800 включает в себя фильтр 802 и матрицу 804 датчиков. В этих иллюстративных примерах фильтр 802 имеет форму клинообразного фильтра. В одном иллюстративном примере фильтр 802 может иметь диапазон длин волн от примерно 400 нанометров до примерно 3600 нанометров.
Фильтр 802 включает в себя блокирующий фильтр 806, подложку 808 и спектральный диспергатор 810. Как показано на чертежах, подложка 808 сформирована на спектральном диспергаторе 810. Блокирующий фильтр 806 сформирован на подложке 808.
Блокирующий фильтр 806 в фильтре 802 выполнен с возможностью уменьшения полосы электромагнитного излучения, которое проходит через фильтр 802. В этом иллюстративном примере блокирующий фильтр 806 может уменьшать электромагнитное излучение, проходящее через блокирующий фильтр 806, который имеет длину волны, не входящую в диапазон от примерно 400 нанометров до примерно 1000 нанометров или длину волны, не входящую в диапазон от примерно 500 нанометров до примерно 3600 нанометров. Конечно, могут быть использованы иные диапазоны в зависимости от конкретного варианта реализации.
В этих иллюстративных примерах блокирующий фильтр 806 образован материалом, который может быть выбран для уменьшения излучения для конкретных длин волн в спектральной области. Еще в одних иллюстративных примерах материал, используемый для формирования блокирующего фильтра 806, может быть выбран для уменьшения по существу всего излучения, не входящего в диапазон блокирующего фильтра 806. В этих иллюстративных примерах электромагнитное излучение не входит в диапазон блокирующего фильтра 806, если электромагнитное излучение имеет длину волн, которая составляет от примерно 400 нанометров до примерно 1000 нанометров.
Подложка 808 может быть образована из материала, который выбирают, чтобы он был по существу проницаемым для электромагнитного излучения, имеющего нужную длину волн или нужные длины волн. Иными словами, подложка 808 может обеспечивать пропускание длин волн, представляющих интерес, а другие длины волн, являющиеся нежелательными, блокируются и не пропускаются через подложку 808. В этом иллюстративном примере длины волн, представляющих интерес, являются длинами волн от примерно 400 нанометров до примерно 1000 нанометров.
Спектральный диспергатор 810 образован слоями 812. Слои 812 включают в себя слои, имеющие различные коэффициенты преломления. В этих иллюстративных примерах слои 812 выполнены сужающимися по толщине с образованием клинообразной формы 814. Иными словами, слои 812 толще возле кромки 818, чем возле кромки 820 спектрального диспергатора 810. Материалы и толщина этих слоев выбраны для обеспечения диапазона частот, которые могут быть разделены фильтром 802.
В этих иллюстративных примерах длина 822 фильтра 802 определяет диапазон частот, которые могут быть пропущены фильтром 802. Иными словами, длина волн, пропущенных через фильтр 802, зависит от участка вдоль длины 822, в котором электромагнитное излучение входит в фильтр 802. Иными словами, длина 822 представляет собой спектральную размерность фильтра 802.
Иными словами, длина волн, пропущенных фильтром 802, увеличивается в направлении стрелки 824. Таким образом, кромка 820 обеспечивает наименьшую длину волн, которые могут быть пропущены фильтром 802, а кромка 818 обеспечивает наибольшую длину волн, которые могут быть пропущены фильтром 802.
Длина 826 является пространственным измерением фильтра 802. Участки вдоль длины 826 соответствуют участкам на поверхности композитной заготовки в этих иллюстративных примерах. В одном иллюстративном примере, участки вдоль длины 826 могут соответствовать множеству участков 522 вдоль ширины 514 композитной заготовки 506 согласно фигуре 5.
Матрица 804 датчиков образована датчиками 828. В этих иллюстративных примерах датчики 828 размещены в рядах и столбцах. Размер датчиков 828 может влиять на спектральное разрешение и пространственное разрешение спектральной сенсорной системы 800. В этих иллюстративных примерах датчики 828 выполнены с возможностью генерирования сигналов в качестве реакции на обнаружение электромагнитного излучения. Эти сигналы могут представлять амплитуду, интенсивность или другие параметры в зависимости от конкретной реализации. Эти сигналы формируют некоторые или все данные 232 согласно фигуре 2.
Матрица 804 датчиков может быть реализована с использованием различных типов датчиков. Например, датчики 828 в матрице 804 датчиков могут быть образованы из цифровых устройств с зарядовой связью, комплементарных структур металл-оксид-полупроводник, полупроводниковых устройств на основе антимонида индия (InSb), полупроводниковых устройств на основе теллурида кадмия и теллурида ртути (HgCdTe) или любого другой типа датчиков, пригодных для обнаружения электромагнитного излучения.
Иллюстрации системы 500 формирования изображений согласно фигуре 5, системы 600 формирования изображений согласно фигуре 6 и системы 700 формирования изображений согласно фигуре 7 не предназначены для ограничения способа, которым может быть реализована система 216 формирования изображений. Например, другие системы формирования изображений также могут включать в себя сенсорную систему датчиков видимого света, проекционный аппарат или оба устройства в дополнение к компонентам, проиллюстрированным для системы 500 формирования изображений, системы 600 формирования изображений и системы 700 формирования изображений. В качестве еще одного иллюстративного примера могут использоваться много источников когерентного света. Иными словами, один или более дополнительных источников когерентного света могут использоваться в дополнение к источнику, выдающему когерентный свет 504 в системе 500 формирования изображений.
Еще в одном иллюстративном примере другие формы электромагнитного излучения могут быть использованы в дополнение к когерентному свету или вместо него. Например, электромагнитное излучение может быть некогерентным светом от дуговой лампы или светоизлучающего диода.
Кроме того, иллюстрация спектральной сенсорной системы 800 по фигуре 8 не предназначена для ограничения способа, которым спектральная сенсорная система 800 может быть реализована в системе 600 формирования изображений и системе 700 формирования изображений. Например, другие типы конструкций могут быть использованы вместо клинообразного фильтра, используемого для фильтра 802, или в дополнение к этому клинообразному фильтру.
Например, другие конструкции могут быть выбраны по меньшей мере из следующего: оптические призмы, голографические дифракционные решетки, обычные решетки и другие подходящие типы конструкций.
Со ссылкой на фигуру 9 изображена иллюстрация двухмерного изображения с графическими индикаторами в соответствии с иллюстративным вариантом реализации изобретения. Как показано на чертежах, изображение 900 является примером реализации изображения 234, представленного в блочной форме на фигуре 2.
В этом иллюстративном примере изображение 900 представляет собой двухмерное изображение 902. Как показано на чертежах двухмерное изображение 902 является изображением композитной заготовки 904. Композитная заготовка 904 представляет собой композитную заготовку для крыла воздушного летательного аппарата в этих иллюстративных примерах.
В этом иллюстративном примере двухмерное изображение 902 включает в себя графические индикаторы 906, 908, 910 и 912. Эти графические индикаторы представляют собой совокупность графических индикаторов, осуществляющих идентифицирование совокупности загрязняющих веществ на поверхности 914 композитной заготовки 904.
В этом иллюстративном примере графический индикатор 906 указывает на присутствие неизвестного загрязняющего вещества на поверхности 914 композитной заготовки 904. Графический индикатор 908 и графический индикатор 910 указывают на присутствие воды на поверхности 914 композитной заготовки 904. Графический индикатор 912 указывает на присутствие частицы пластмассы на поверхности 914 композитной заготовки 904.
При помощи двухмерного изображения 902 оператор может осуществлять идентифицирование загрязняющих веществ, присутствующих на поверхности 914 композитной заготовки 904. Таким образом, эти загрязняющие вещества могут быть учтены перед окончательной укладкой слоев композитного материала на композитную заготовку 904 и отверждением композитной заготовки 904. Например, загрязняющие вещества могут быть удалены с поверхности 914. Еще в одних иллюстративных примерах один или более слоев могут быть заменены в композитной заготовке 904.
Различные компоненты, показанные на фигуре 1 и фигурах 4-9, могут быть скомбинированы с компонентами по фигурам 2-4, используемыми с компонентами по фигурам 2-4, или комбинацией указанных двух элементов. Помимо этого, некоторые из компонентов согласно фигуре 1 и фигурам 4-9 могу быть иллюстративными примерами того, как компоненты, показанные в блочной форме на фигуре 2-4, могут быть реализованы в качестве физических конструкций.
Далее на фигуре 10 изображена иллюстрация блок-схемы процесса контролирования композитной заготовки в соответствии с иллюстративным вариантом реализации изобретения. В этом показанном примере процесс, проиллюстрированный на фигуре 10, может быть реализован в среде 200 обеспечения контроля по фигуре 2 для использования в производственной среде 100 по фигуре 1. В этих иллюстративных примерах процесс может быть использован для контролирования заготовок, таких как композитная заготовка 206 по фигуре 2. Этот процесс выполняют перед отверждением композитной заготовки или отверждением конкретных слоев на композитной заготовке.
Процесс начинают с направления электромагнитного излучения к поверхности композитной заготовки (операция 1000). Электромагнитное излучение может появляться из источника 218 электромагнитного излучения согласно фигуре 2. Затем согласно процессу осуществляют обнаружение ответного сигнала на электромагнитное излучение, направленное к поверхности композитной заготовки (операция 1002). Ответный сигнал может быть обнаружен и обработан при последующих операциях, показанных на этой фигуре чертежа, посредством системы 202 контроля по фигуре 2. Далее, ответный сигнал на электромагнитное излучение, направленное к поверхности композитной заготовки, разделяют на множество длин волн для каждого участка из множества участков на поверхности композитной заготовки (операция 1004). Электромагнитное излучение может быть разделено системой 216 формирования изображений в системе 202 контроля. Ответный сигнал может иметь место для более чем одного участка. В этих иллюстративных примерах ответный сигнал может иметь место вдоль линии или какой-либо иной области. В одном иллюстративном примере ответный сигнал может быть для множества участков 522 в месте 520 вдоль длины 518 композитной заготовки 506 согласно фигуре 5.
Далее согласно процессу производят идентифицирование совокупности загрязняющих веществ на поверхности композитной заготовки на основе упомянутого множества длин волн для каждого участка из упомянутого множества участков на поверхности композитной заготовки (операция 1006). Идентификация загрязняющих веществ при выполнении операции 1006 может быть осуществлена анализатором 222 в системе 202 контроля. В этих иллюстративных примерах совокупность загрязняющих веществ может в некоторых случаях быть нулевой, если ничего не обнаружено.
Двухмерное изображение поверхности композитной заготовки генерируют с совокупностью графических индикаторов, указывающих на совокупность загрязняющих веществ, идентифицированных на основе упомянутого множества длин волн для каждого участка из упомянутого множества участков на поверхности композитной заготовки (операция 1008). Двухмерное изображение может быть сгенерировано анализатором 222. В этом иллюстративном примере каждое вещество из указанных загрязняющих веществ идентифицируют с использованием графического индикатора. Если загрязняющих веществ нет, то совокупность графических индикаторов является пустой совокупностью. В этих иллюстративных примерах двухмерное изображение может быть сгенерировано с использованием данных на основе длин волн.
Например, для тех мест, где загрязняющие вещества отсутствуют, в изображении может использоваться особенный графический индикатор для указания на отсутствие загрязняющих веществ. Еще в одних иллюстративных примерах графические индикаторы могут быть размещены в сгенерированном изображении видимого света поверхности композитной заготовки. Изображение видимого света также может быть сгенерировано системой 216 формирования изображений в системе 202 контроля по фигуре 2.
Затем согласно процессу осуществляют проецирование двухмерного изображения с совокупностью графических индикаторов на поверхность композитной заготовки (операция 1010) с последующим завершением осуществляемого процесса. Проецирование двухмерного изображения на поверхность заготовки может быть осуществлено с использованием системы 216 формирования изображений под управлением анализатора 222.
На фигуре 11 изображена иллюстрация блок-схемы процесса идентифицирования совокупности загрязняющих веществ на основе множества длин волн в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на фигуре 11, представляет собой пример одной реализации операции 1006 согласно фигуре 10.
Процесс начинают с выбора участка из упомянутого множества участков на поверхности композитной заготовки (операция 1100). Например, указанный участок может быть участком внутри множества участков 522 для композитной заготовки 506 согласно фигуре 5. Еще в одних иллюстративных примерах упомянутое множество участков может представлять собой все участки поперек ширины 514 для всех положений вдоль длины 518 композитной заготовки 506.
Производят идентифицирование данных для указанного участка (операция 1102). Эти данные представляют собой данные, генерированные на основе множества длин волн для выбранных участков. Данные могут включать в себя, например, длину волн и некое значение для длины волны. Это значение может представлять собой интенсивность, амплитуду или иное подходящее значение. Данные для указанного участка представляют собой сигнатуру для этого участка в этих иллюстративных примерах.
Затем согласно процессу сравнивают сигнатуры с группой сигнатур в базе данных сигнатур (операция 1104). База данных сигнатур может быть, например, базой данных 240 сигнатур согласно фигуре 2. База данных сигнатур включает в себя сигнатуры известных загрязняющих веществ. Кроме того, база данных также может включать в себя сигнатуры известных композитных материалов, которые должны присутствовать в композитной заготовке.
Затем определяют факт присутствия загрязняющего вещества на участке на основе произведенного сравнения сигнатуры для указанного участка с базой данных сигнатур (операция 1106). Если загрязняющее вещество присутствует, то согласно процессу производят идентифицирование загрязняющего вещества (операция 1108). Эта идентификация может быть основана на идентифицировании загрязняющего вещества в качестве одного из веществ в базе данных сигнатур. В некоторых случаях, если загрязняющее вещество не соответствует сигнатуре известных загрязняющих веществ в базе данных сигнатур, а также не соответствует сигнатуре для композитных материалов, которые должны присутствовать, загрязняющее вещество идентифицируют как неизвестное загрязняющее вещество.
После этого определяют факт присутствия дополнительного необработанного участка в упомянутом множестве участков на поверхности композитной заготовки (операция 1110). Если присутствует дополнительный необработанный участок, процесс возвращают к операции 1100. В противном случае, процесс заканчивают.
В отношении операции 1106, если загрязняющее вещество отсутствует, то указанный участок идентифицируют как не имеющий загрязняющего вещества (операция 1112) с последующим переходом к операции 1110, как описано выше. При выполнении операции 1112 идентификация может включать в себя идентифицирование материала, который присутствует на участке. В этом случае материал является материалом, который предполагается для использования в композитной заготовке.
На фигуре 12 изображена иллюстрация блок-схемы процесса генерирования двухмерного изображения поверхности композитной заготовки с совокупностью графических индикаторов, указывающих на совокупность загрязняющих веществ, в соответствии с иллюстративным вариантом реализации изобретения. Процесс, проиллюстрированный на фигуре 12, представляет собой пример одной реализации операции 1008 согласно фигуре 10.
Процесс начинают с выбора загрязняющего вещества из совокупности загрязняющих веществ для обработки (операция 1200). Согласно процессу производят идентифицирование загрязняющего вещества (операция 1202). Идентификация - это то, что получают при выполнении операции 1108 согласно фигуре 11.
На основании идентифицирования загрязняющего вещества, согласно процессу выбирают графический индикатор для загрязняющего вещества (операция 1204). Графический индикатор может иметь различные формы. Например, графический индикатор может быть выбран по меньшей мере из следующего: цвет, значок, текст, штриховка и графические индикаторы других подходящих типов. Затем согласно процессу производят идентифицирование участка для этого графического индикатора в двухмерном изображении (операция 1206). Указанный участок в двухмерном изображении представляет собой участок, который соответствует участку загрязняющего вещества на поверхности заготовки. Затем согласно процессу размещают графический индикатор в двухмерном изображении в идентификационном участке (операция 1208).
Далее определяют факт присутствия дополнительного необработанного загрязняющего вещества в этой совокупности идентифицированных загрязняющих веществ (операция 1210). Если дополнительное необработанное загрязняющее вещество присутствует для обработки, процесс возвращают к операции 1200.
В противном случае процесс заканчивают, и двухмерное изображение готово для анализа оператором. Оператор может видеть это изображение на дисплейном устройстве. В некоторых иллюстративных примерах двухмерное изображение может быть спроецировано на поверхность заготовки. Проецирование двухмерного изображения выполняют таким образом, что графические индикаторы расположены на тех участках, в которых загрязняющие вещества фактически присутствуют на поверхности заготовки. Кроме того, форма и размер графических индикаторов могут быть выбраны таким образом, что они имеют тот же размер и ту же форму, что и загрязняющие вещества на поверхности заготовки.
На фигуре 13 изображена иллюстрация блок-схема процесса контролирования композитной заготовки в соответствии с иллюстративным вариантом реализации изобретения. В этом иллюстративном примере процесс согласно фигуре 13 может быть реализован в среде 200 обеспечения контроля по фигуре 2 для использования в производственной среде 100 по фигуре 1. В частности, указанные различные операции могут быть реализованы в системе 202 контроля по фигуре 2.
Процесс начинают с идентифицирования области композитной заготовки для контролирования (операция 1300). Этой областью может быть участок композитной заготовки или вся композитная заготовка в зависимости от конкретного варианта реализации.
Например, для уменьшения времени, необходимого для контролирования, может быть выбрана область, которая имела нежелательное количество несоответствий во время предыдущего изготовления композитной конструкции. Эта идентификация может быть выполнена на основе статистической информации об изготовлении такой же композитной конструкции, собранной по прошествии определенного времени. Еще в одних иллюстративных примерах указанной областью может быть выбрана область, имеющая достаточно сложные геометрические формы, обусловливающие высокую вероятность появления ненужных несоответствий.
Затем согласно процессу производят идентифицирование базы данных сигнатур для использования в данных анализа, сгенерированных на основе разделения ответного сигнала на длины волн (операция 1302). Затем согласно процессу направляют электромагнитное излучение на выбранную область контролирования (операция 1304).
После этого согласно процессу генерируют данные на основе длин волн, выделенных в качестве реакции на электромагнитное излучение (операция 1306). Согласно процессу генерируют изображение видимого света выбранного участка с использованием сенсорной системы датчиков видимого света (операция 1308).
Затем согласно процессу производят идентифицирование материалов, представленных для композитной заготовки, с использованием данных, сгенерированных на основе длин волн, выделенных из ответного сигнала с использованием базы данных сигнатур (операция 1310). При операцию 1310 производят идентифицирование загрязняющих веществ, а также материалов, предполагаемых для использования для композитной заготовки.
Затем согласно процессу производит идентифицирование участков материалов (операция 1312). Эти участки могут представлять собой координаты композитной заготовки. Конечно, может быть использована любая система координат. В этих иллюстративных примерах система координат может быть двухмерной или трехмерной системой координат, начало которой находится в каком-либо месте на композитной заготовке.
Затем согласно процессу размещают графические индикаторы для любых загрязняющих веществ, обнаруженных на изображении видимого света (операция 1314). Затем согласно процессу определяют присутствие загрязняющего вещества (операция 1316). Если загрязняющее вещество присутствует, то генерируют предупредительный сигнал (операция 1318). После этого загрязняющее вещество может быть удалено (операция 1319). Затем определяют, завершена ли композитная заготовка и готова ли она для отверждения (операция 1320). Если композитная заготовка завершена, то согласно процессу осуществляют отверждение композитной заготовки (операция 1322) с последующим завершением осуществляемого процесса.
В отношении операции 1316, если загрязняющие вещества отсутствуют, процесс также переходит к операции 1320. В отношении операции 1320, если композитная заготовка не завершена, то укладывают множество композитных слоев на композитной заготовке (операция 1324). Затем процесс возвращают к операции 1300.
Блок-схемы и структурные схемы в различных изображенных вариантах осуществления изобретения иллюстрируют архитектуру, функциональность и работу некоторых возможных реализаций устройств и способов в иллюстративном варианте осуществления изобретения. В этом отношении каждый блок в блок-схемах или структурных схемах может представлять модуль, сегмент, функцию и/или часть операции или этапа. Например, один или более блоков могут быть реализованы в виде программного кода, в аппаратных средствах или комбинации программного кода и аппаратных средств. При реализации в аппаратных средствах аппаратные средства могут, например, иметь форму интегральных микросхем, которые изготовлены или выполнены с возможностью осуществления одной или более операций в блок-схемах или структурных схемах.
В некоторых альтернативных реализациях иллюстративного варианта осуществления изобретения функция или функции, отмеченная или отмеченные в блоках может или могут иметь место в порядке, отличном от порядка, отмеченного на чертежах. Например, в некоторых случаях, два блока, показанные последовательно, могут быть реализованы по существу одновременно, или блоки могут иногда быть реализованы в обратном порядке в зависимости от используемой функциональности. Также, другие блоки могут быть добавлены в дополнение к показанным блокам в блок-схеме или структурной схеме.
На фигуре 14 изображена иллюстрация системы обработки данных в соответствии с иллюстративным вариантом реализации изобретения. Система 1400 обработки данных может быть использована для реализации компьютерной системы 238 воздушного летательного аппарата согласно фигуре 2. В этом иллюстративном примере система 1400 обработки данных включает в себя инфраструктуру 1402 связи, которое обеспечивает сообщение между обрабатывающим блоком 1404, запоминающим устройством 1406, устройством 1408 постоянного хранения, блоком 1410 связи, блоком 1412 ввода/вывода (I/O) и дисплеем 1414. В этом примере инфраструктура связи может иметь форму системы шин. Обрабатывающий блок 1404 служит для исполнения команд для программного обеспечения, которое может быть загружено в запоминающее устройство 1406. Обрабатывающий блок 1404 может представлять собой множество процессоров, мультипроцессорное ядро или какой-либо иной тип процессора в зависимости от конкретной реализации.
Запоминающее устройство 1406 и устройство 1408 постоянного хранения являются примерами запоминающих блоков 1416. Запоминающий блок представляет собой какую-либо часть аппаратных средств, выполненных с возможностью сохранения информации, такой как, например, без ограничения, данные, программный код в функциональной форме, и/или какой-либо иной подходящей информации либо на временной основе и/или постоянной основе. В этих иллюстративных примерах запоминающие блоки 1416 могут также упоминаться как считываемые компьютером запоминающие блоки. Запоминающее устройство 1406 в этих примерах может представлять собой, например, оперативное запоминающее устройство или какой-либо иной подходящий энергозависимый или энергонезависимый запоминающий блок. Устройство 1408 постоянного хранения может иметь различные формы в зависимости от конкретной реализации.
Например, устройство 1408 постоянного хранения может содержать один или более компонентов или устройств. Например, устройство 1408 постоянного хранения может представлять собой накопитель на жестких магнитных дисках, электрически перепрограммируемое постоянное запоминающее устройство, перезаписываемый оптический диск, перезаписываемую магнитную ленту или какую-либо комбинацию вышеуказанного. Носитель, используемый устройством 1408 постоянного хранения, также может быть съемным. Например, для устройства 1408 постоянного хранения может быть использован съемный накопитель на жестких магнитных дисках.
Блок 1410 связи в этих иллюстративных примерах обеспечивает сообщение с другими системами обработки данных или устройствами. В этих иллюстративных примерах блок 1410 связи представляет собой сетевую интерфейсную карту.
Блок 1412 ввода/вывода обеспечивает возможность ввода и вывода данных с других устройств, которые могут быть соединены с системой 1400 обработки данных. Например, блок 1412 ввода/вывода может обеспечивать соединение для ввода пользователем посредством клавиатуры, мыши и/или каким-либо иным подходящим устройством ввода. Кроме того, блок 1412 ввода/вывода может отправлять выходные данные на принтер. Дисплей 1414 обеспечивает механизм для отображения информации пользователю.
Команды для операционной системы, приложения и/или программы могут быть размещены в запоминающих блоках 1416, которые сообщаются с обрабатывающим блоком 1404 через инфраструктуру связи 1402. Обрабатывающие процессы для различных вариантов осуществления изобретения могут быть выполнены обрабатывающим блоком 1404 с использованием реализованных на компьютере команд, которые могут быть размещены в запоминающем устройстве, таком как запоминающее устройство 1406.
Эти команды упоминаются как программный код, используемый компьютером программный код или компьютерочитаемый программный код, который может быть считан и исполнен процессором в обрабатывающем блоке 1404. Программный код в различных вариантах осуществления изобретения может быть реализован на различных физических или компьютерочитаемых носителях для хранения информации, таких как запоминающее устройство 1406 или устройство 1408 постоянного хранения.
Программный код 1418 размещен в функциональной форме на компьютерочитаемом носителе 1420, выполненном с возможностью удаления по выбору, и может быть загружен или передан в систему 1400 обработки данных для исполнения обрабатывающим блоком 1404. Программный код 1418 и компьютерочитаемый носитель 1420 образуют компьютерный программный продукт 1422 в этих иллюстративных примерах. В одном примере компьютерочитаемый носитель 1420 может представлять собой компьютерочитаемый носитель 1424 для хранения информации или компьютерочитаемые носители 1426 сигнала.
В этих иллюстративных примерах компьютерочитаемый носитель 1424 для хранения информации представляет собой физический или вещественный запоминающий блок, используемый для хранения программного кода 1418, а не носитель, который распространяет или передает программный код 1418.
В альтернативном варианте реализации изобретения программный код 1418 может быть передан в систему 1400 обработки данных с использованием компьютерочитаемых носителей 1426 сигнала. Компьютерочитаемые носители 1426 сигнала могут представлять собой, например, распространяемый сигнал с данными, содержащий программный код 1418. Например, компьютерочитаемые носители 1426 сигнала могут представлять собой электромагнитный сигнал, оптический сигнал и/или какой-либо иной подходящий тип сигнала. Эти сигналы могут быть переданы по линиям связи, таким как беспроводные линии связи, оптоволоконный кабель, коаксиальный кабель, провод и/или какой-либо иной подходящий тип линии связи.
Различные компоненты, показанные для системы 1400 обработки данных, не предназначены для создания архитектурных ограничений на способ, которым могут быть реализованы различные варианты осуществления изобретения. Различные иллюстративные варианты осуществления изобретения могут быть реализованы в системе обработки данных, включающей компоненты в дополнение к компонентам, показанным для системы 1400 обработки данных, и/или вместо них. Другие компоненты, показанные на фигуре 14, могут отличаться от показанных иллюстративных примеров. Различные варианты осуществления изобретения могут быть реализованы с использованием любого аппаратного устройства или системы, выполненной с возможностью запуска программного кода 1418.
Раскрытые иллюстративные варианты реализации изобретения могут быть описаны в контексте способа 1500 изготовления воздушного летательного аппарата и его текущего ремонта, как показано на фигуре 15, и воздушного летательного аппарата 1600, как показано на фигуре 16. На фигуре 15 изображена иллюстрация способа изготовления воздушного летательного аппарата и его текущего ремонта в соответствии с иллюстративным вариантом реализации изобретения. Во время подготовки производства способ 1500 изготовления воздушного летательного аппарата и его текущего ремонта может включать проектирование 1502 воздушного летательного аппарата 1600 согласно фигуре 16 и материальное снабжение 1504. Во время изготовления осуществляют производство 1506 компонентов и сборочных узлов и системную интеграцию 1508 воздушного летательного аппарата 1600 согласно фигуре 16. После этого воздушный летательный аппарат 1600 согласно фигуре 16 может пройти через стадию сертификации и доставки 1510 для ввода в эксплуатацию 1512.
При эксплуатации 1512 пользователем воздушный летательный аппарат 1600 согласно фигуре 16 подпадает под регламентное техобслуживание и текущий ремонт 1514, которые также могут включать модернизацию, перенастройку, переоборудование и иное техобслуживание или иной текущий ремонт.
Каждый из процессов способа 1500 может быть выполнен или осуществлен системотехническим предприятием, третьей стороной и/или оператором. В этих примерах оператором может быть пользователь. По замыслу этого описания системотехническое предприятие может содержать, помимо прочего, любое количество авиационных производителей и основных системных субподрядчиков; третья сторона может содержать, помимо прочего, любое количество продавцов, субподрядчиков и поставщиков; а оператор может представлять собой, помимо прочего, авиакомпанию, лизинговую компанию, военное ведомство, обслуживающую организацию и тому подобное.
Далее на фигуре 16 изображена иллюстрация воздушного летательного аппарата, в котором может быть реализован иллюстративный вариант реализации изобретения. В этом примере воздушный летательный аппарат изготовлен способом 1500 изготовления воздушного летательного аппарата и его текущего ремонта согласно фигуре 15 и может включать в себя планер 1602 с множеством систем 1604 и внутренней частью 1606. Примеры систем 1604 включают в себя одну или большее количество из следующего: двигательная система 1608, электрическая система 1610, гидравлическая система 1612 и система 1614 регулирования параметров окружающей среды. Может быть включено любое количество других систем. Хотя показан пример, относящийся к аэрокосмической промышленности, различные иллюстративные варианты реализации изобретения могут быть применены в других отраслях промышленности, например, при изготовлении автомобилей.
Устройство и способы, реализуемые согласно настоящему документу, могут быть применены во время по меньшей мере одного из этапов способа 1500 изготовления воздушного летательного аппарата и его текущего ремонта по фигуре 15.
В иллюстративных примерах способ и устройство могут быть реализованы в среде 200 обеспечения контроля, чтобы контролировать композитные заготовки, сформированные во время этапа производства 1506 компонентов и сборочных узлов. В другом иллюстративном примере способ и устройство в соответствии с иллюстративным вариантом реализации изобретения также могут быть реализованы во время этапа регламентного техобслуживания и текущего ремонта 1514 в отношении обрабатываемых композитных заготовок для формирования композитных конструкций, используемых при замене или модернизации композитных конструкций в воздушном летательном аппарате 1600. Использование множества различных иллюстративных вариантов реализации изобретения обеспечивает возможность по существу ускорения сборки и/или уменьшения стоимости воздушного летательного аппарата 1600.
Таким образом, иллюстративные варианты реализации изобретения обеспечивают способ и устройство для контролирования композитной заготовки. Кроме того, иллюстративные варианты реализации изобретения также могут быть использованы для контролирования поверхности рабочего органа, на который материалы могу быть уложены для формирования композитной заготовки. Согласно иллюстративным вариантам реализации изобретения выполняют контролирование для идентифицирования загрязняющих веществ на поверхности слоя композитного материала перед отверждением композитной заготовки. Таким образом, загрязняющие вещества или области, содержащие загрязняющие вещества, могут быть удалены. В результате, обеспечивается возможность уменьшения множества несоответствий, которые могут иметь место в композитной конструкции. А с уменьшением несоответствий также может быть уменьшено количество доработок или переделок композитных конструкций.
Кроме того, загрязняющие вещества могут быть идентифицированы в областях, которые не содержатся в готовой композитной конструкции. Эти области могут быть, например, областями композитной заготовки или слоями композитного материала для использования при формировании композитной заготовки. Например, загрязняющие вещества могут быть идентифицированы в области композитной заготовки, которая не будет использована, или в области, которая будет отбракована. Иными словами, части композитной заготовки, которые будут отбракованы во время изготовления композитной конструкции, могут не подвергаться контролированию на предмет загрязняющих веществ. Наличие загрязняющих веществ в этих типах областей может не учитываться при формировании композитной заготовки.
Помимо этого, поле контролирования может быть задано таким образом, что только области, используемые в готовой композитной конструкции, могут быть подвергнуты контролированию.
Таким образом, время, необходимое для контролирования и идентифицирования загрязняющих веществ на композитной заготовке, может быть уменьшено.
Различные иллюстративные варианты реализации изобретения также могут быть использованы для управления различными типами контроля качества поступающего композитного материала на приемной площадке. Например, выполнение контролирования композитных материалов перед размещением композитных материалов на рабочих органах или иной переработкой в композитную заготовку может привести к идентифицированию загрязняющих веществ на композитном материале перед использованием композитного материала в рабочем процессе. Помимо этого, различные иллюстративные варианты реализации изобретения также могут быть использованы для идентифицирования несоответствий в композитных материалах, предназначаемых для использования при формировании заготовки. В настоящем документе термин "несоответствие" в отношении композитного материала для применения при формировании композитной заготовки может включать в себя загрязняющее вещество, разрушение связей в композитном материале, расслоение в композитном материале или иные нежелательные состояния в композиционной схеме. В результате, обнаружение загрязняющего вещества на этом этапе по сравнению с обнаружением загрязняющего вещества позднее во время процесса изготовления позволяет экономить время и деньги.
В этих иллюстративных примерах несоответствие в композитном материале для использования при формировании заготовки может иметь место на поверхности композитного материала или располагаться во внутренней части композитного материала. Изображение, сгенерированное на основе ответного сигнала на электромагнитное излучение, может включать в себя графические индикаторы, которые указывают на эти несоответствия. Графические индикаторы могут быть выбраны для указания на тип обнаруженного несоответствия.
Иллюстративные варианты реализации изобретения обеспечивают создание способа и устройства, которые позволяют уменьшить количество времени, необходимого для изготовления деталей композитных конструкций. В результате, затраты, время или как затраты, так и время для изготовления инструментального комплекса, например, воздушного летательного аппарата могут быть уменьшены.
Описание различных иллюстративных вариантов реализации изобретения было представлено в целях иллюстрации и описания и не является исчерпывающим или ограничивающим раскрытыми формами реализации настоящего изобретения.
Многие модификации и изменения будут очевидны специалистам в данной области техники. Кроме того, различные иллюстративные варианты реализации изобретения могут обеспечивать различные признаки по сравнению с другими иллюстративными вариантами реализации изобретения.
Вариант или варианты реализации изобретения выбраны и описаны для того, чтобы лучше объяснить принципы его осуществления, практическое применение и дать представление другим специалистам в данной области техники о различных вариантах с различными модификациями, которые подходят для конкретного использования изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОФИЛИРОВАННЫЙ ЗАПОЛНИТЕЛЬ, СОДЕРЖАЩИЙ МАТРИЦУ ИЗ ПРЕРЫВИСТЫХ ВОЛОКОН | 2016 |
|
RU2716794C2 |
| СИНХРОНИЗИРОВАННАЯ ФАЗИРОВАННАЯ РЕШЕТКА И ИНФРАКРАСНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ВЛАГИ | 2018 |
|
RU2769256C2 |
| ВИЗУАЛИЗАЦИЯ МЕДИЦИНСКИХ УСТРОЙСТВ В РЕАЛЬНОМ ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ НАНОМАТЕРИАЛОВ | 2012 |
|
RU2605997C2 |
| ЗАЩИТА ПОВЕРХНОСТИ ОТ ЭЛЕКТРОМАГНИТНОЙ ЭНЕРГИИ | 2014 |
|
RU2662870C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ВЛАГИ | 2018 |
|
RU2767118C2 |
| АКТИВНАЯ ОПТИЧЕСКАЯ СИСТЕМА С ПЕРЕМЕННЫМ РАЗРЕШЕНИЕМ | 2016 |
|
RU2721304C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ПОЛУЧЕНИЯ АКТИВНОГО ПРОГРАММИРУЕМОГО АКУСТИЧЕСКОГО МЕТАМАТЕРИАЛА | 2015 |
|
RU2671643C2 |
| СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ ВНУТРЕННЕЙ И НАРУЖНОЙ ОБЛАСТЕЙ ПАЦИЕНТА | 2009 |
|
RU2564079C2 |
| ОПТИЧЕСКОЕ СЕНСОРНОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И ИДЕНТИФИКАЦИИ ФОРМЫ И СТРУКТУРЫ ОБЪЕКТА | 2020 |
|
RU2750681C1 |
| СОРТИРОВОЧНОЕ УСТРОЙСТВО | 2012 |
|
RU2589537C2 |
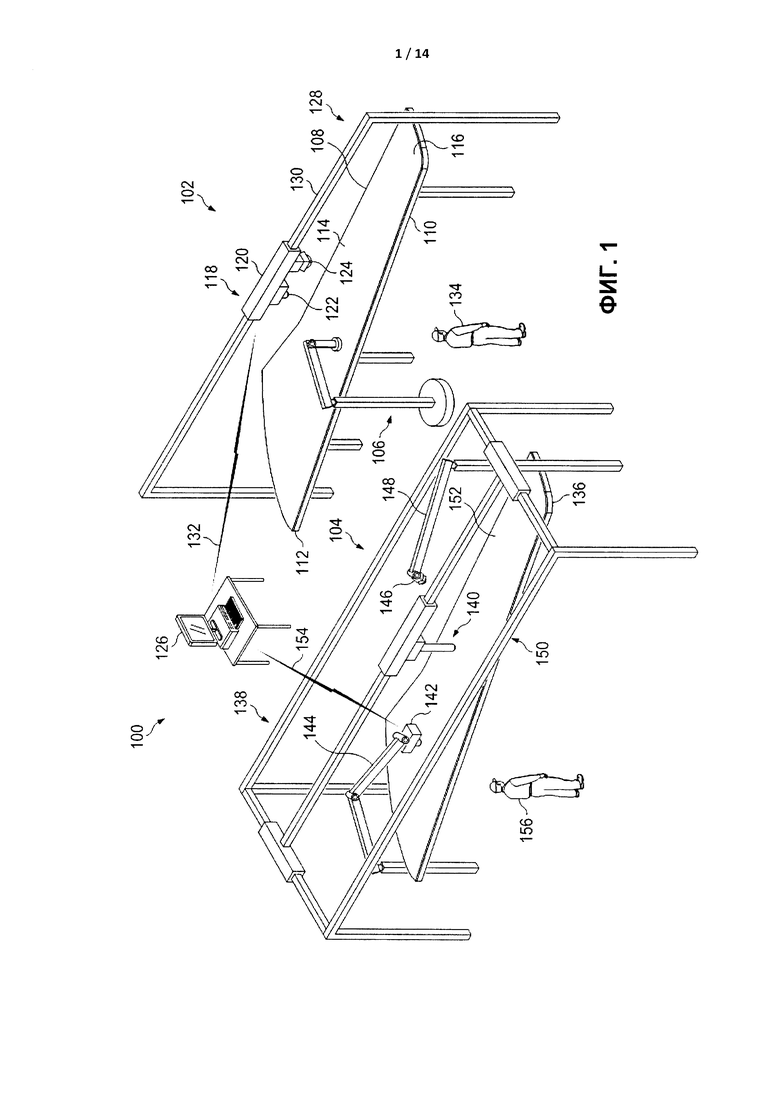
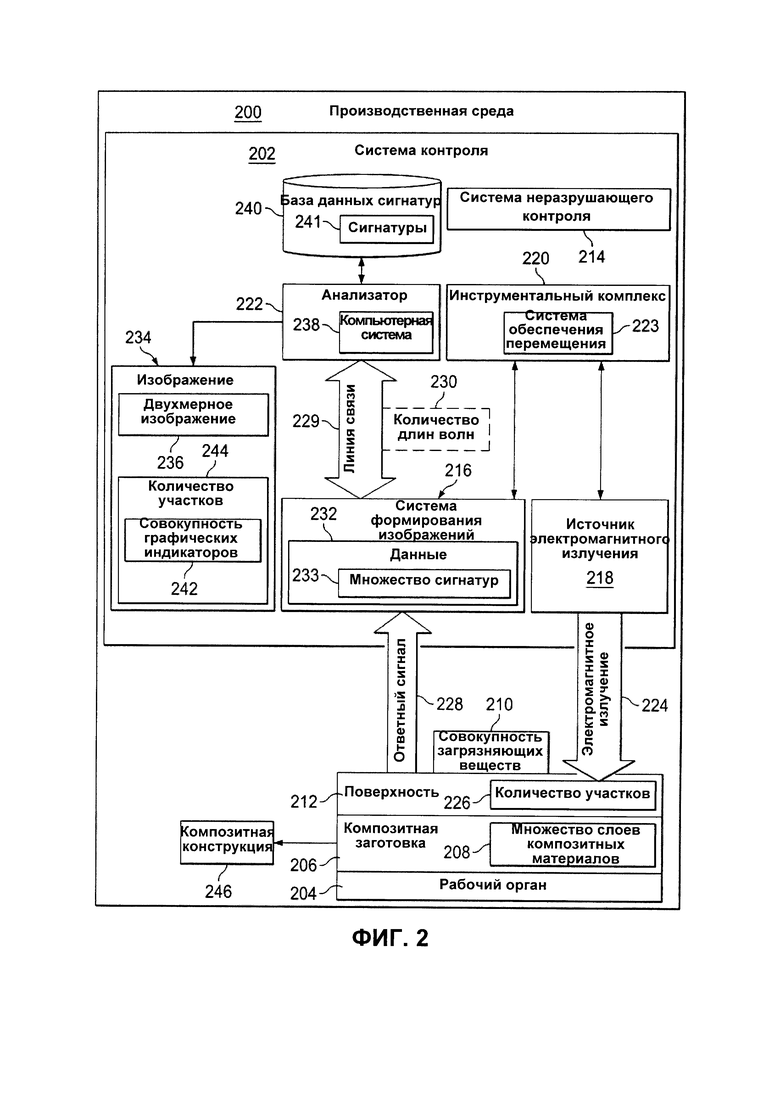
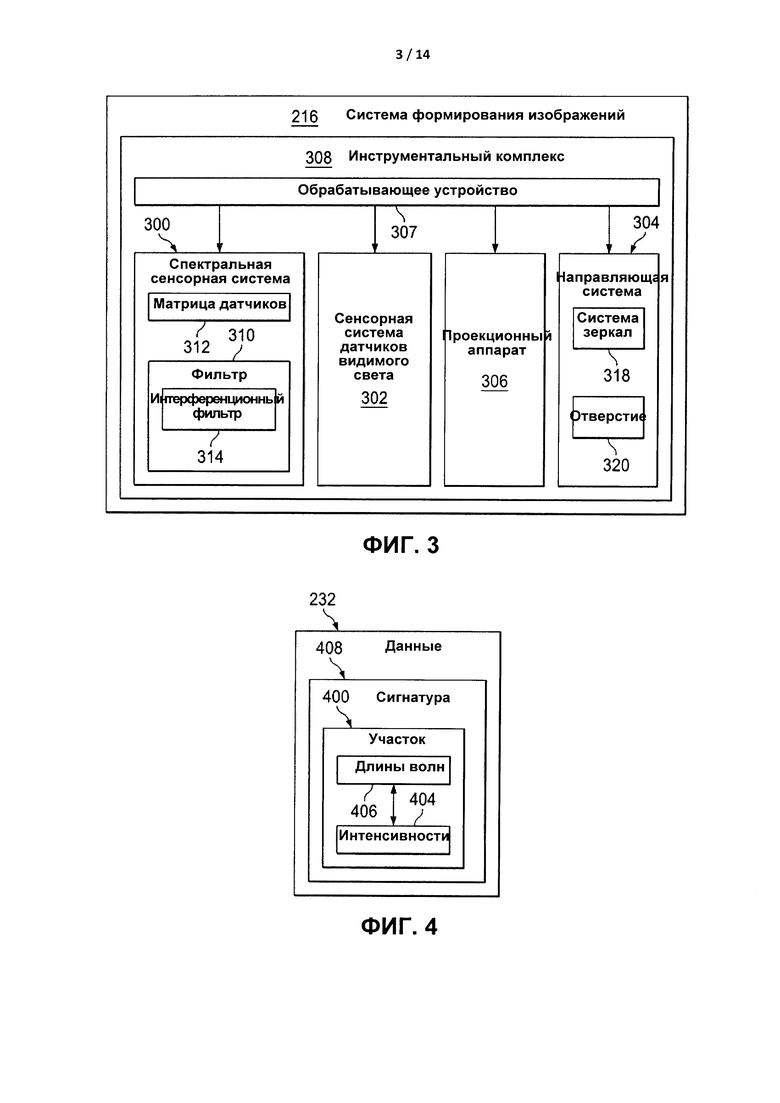
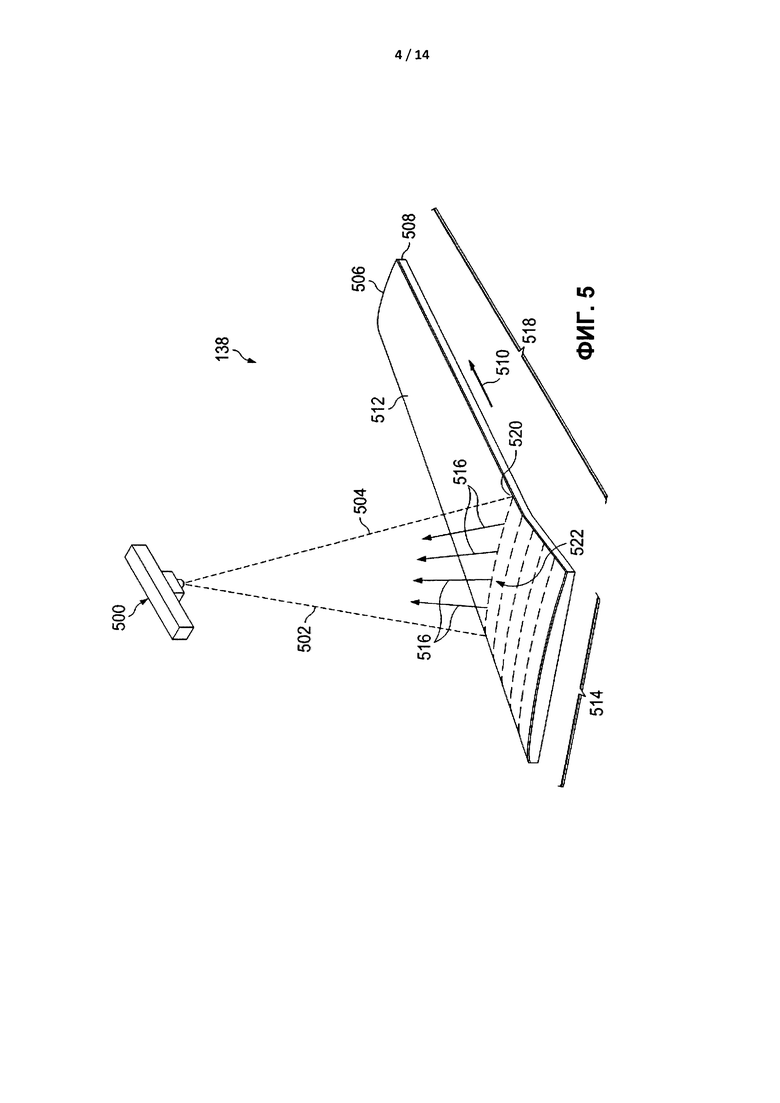
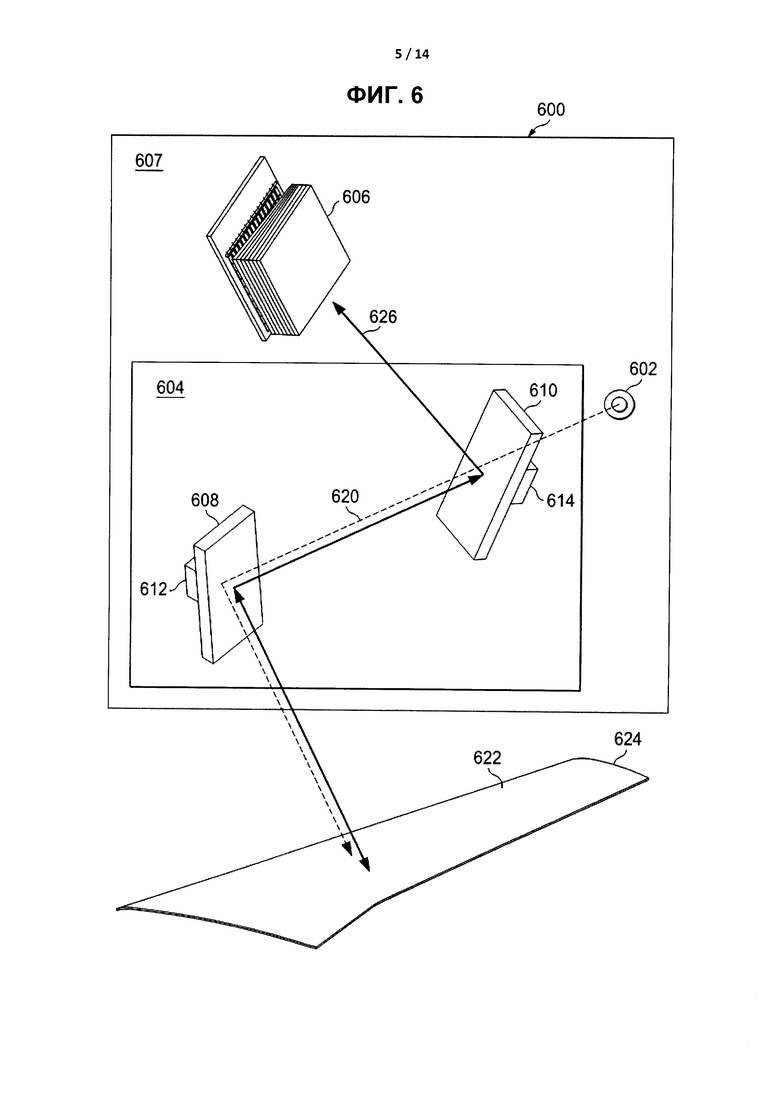
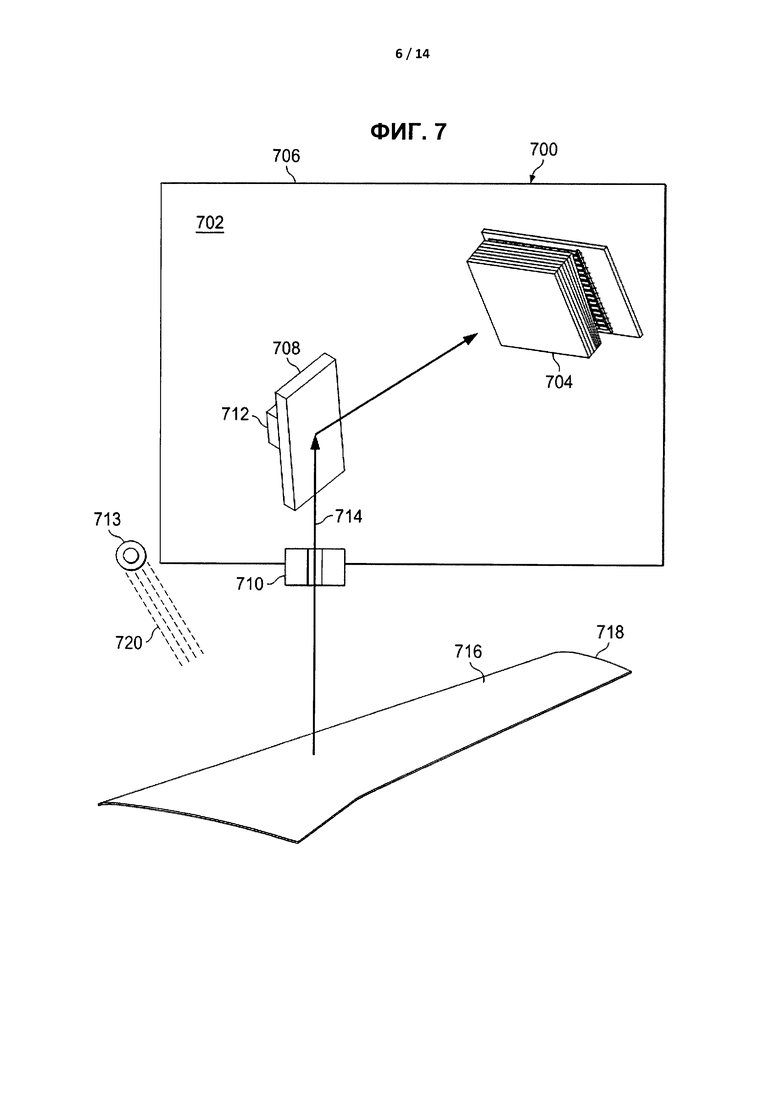
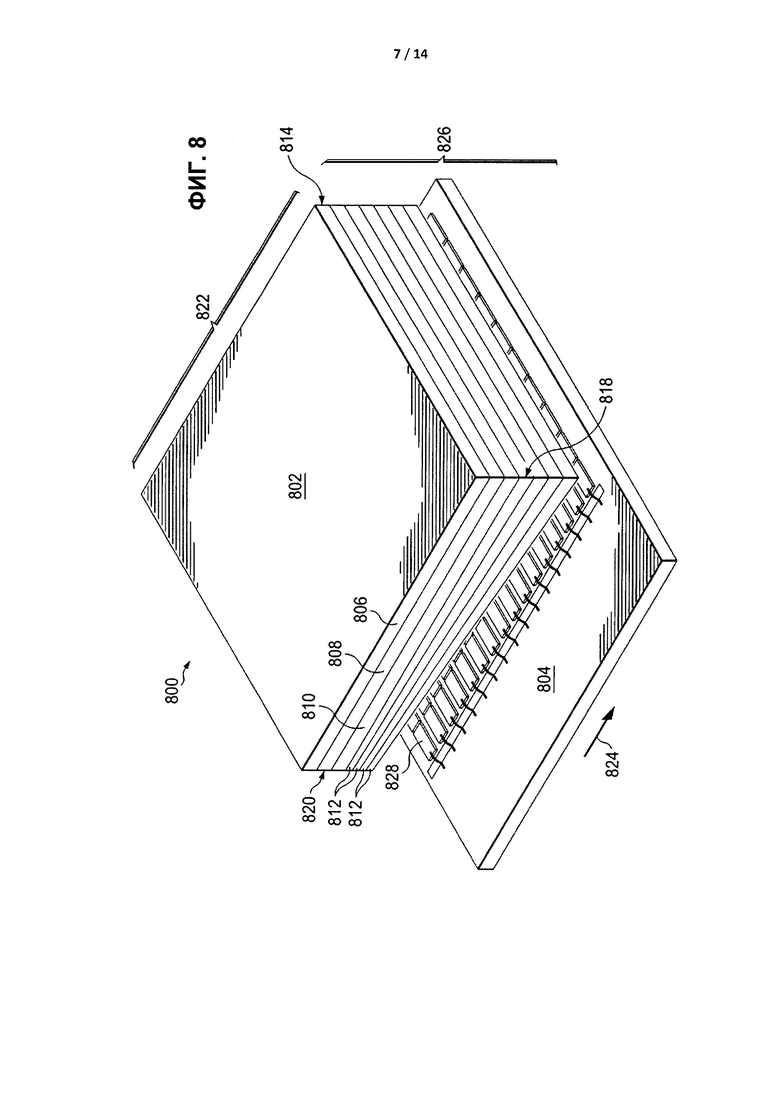
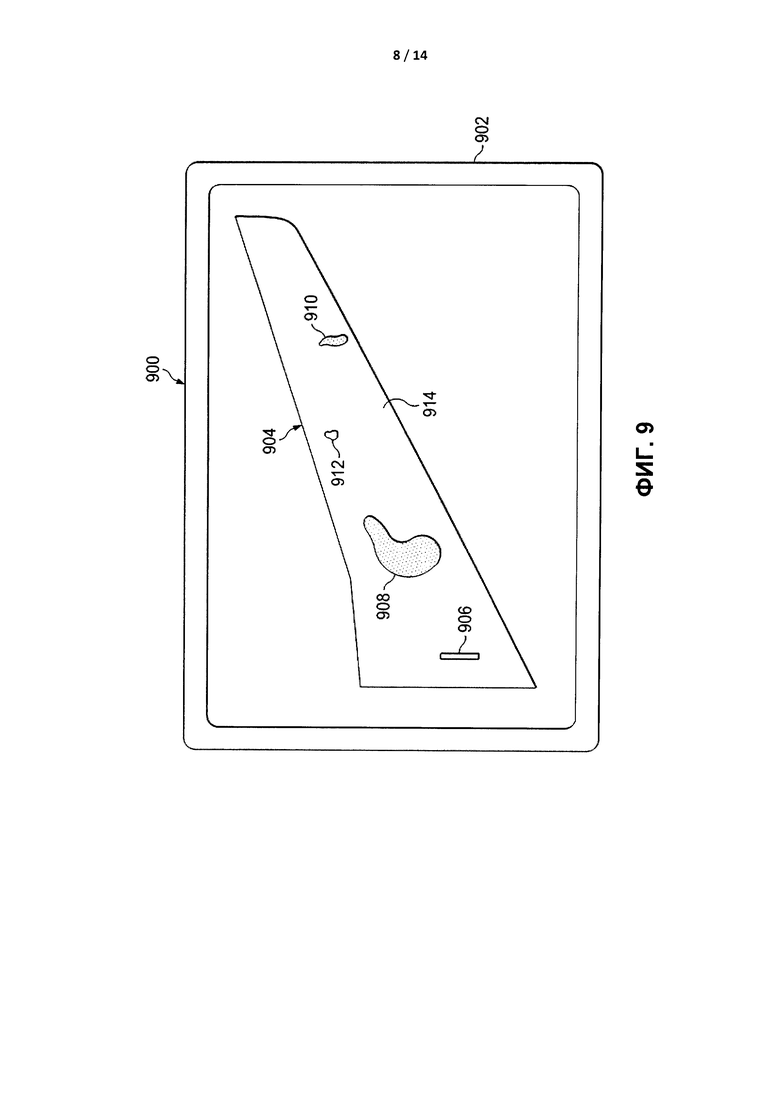
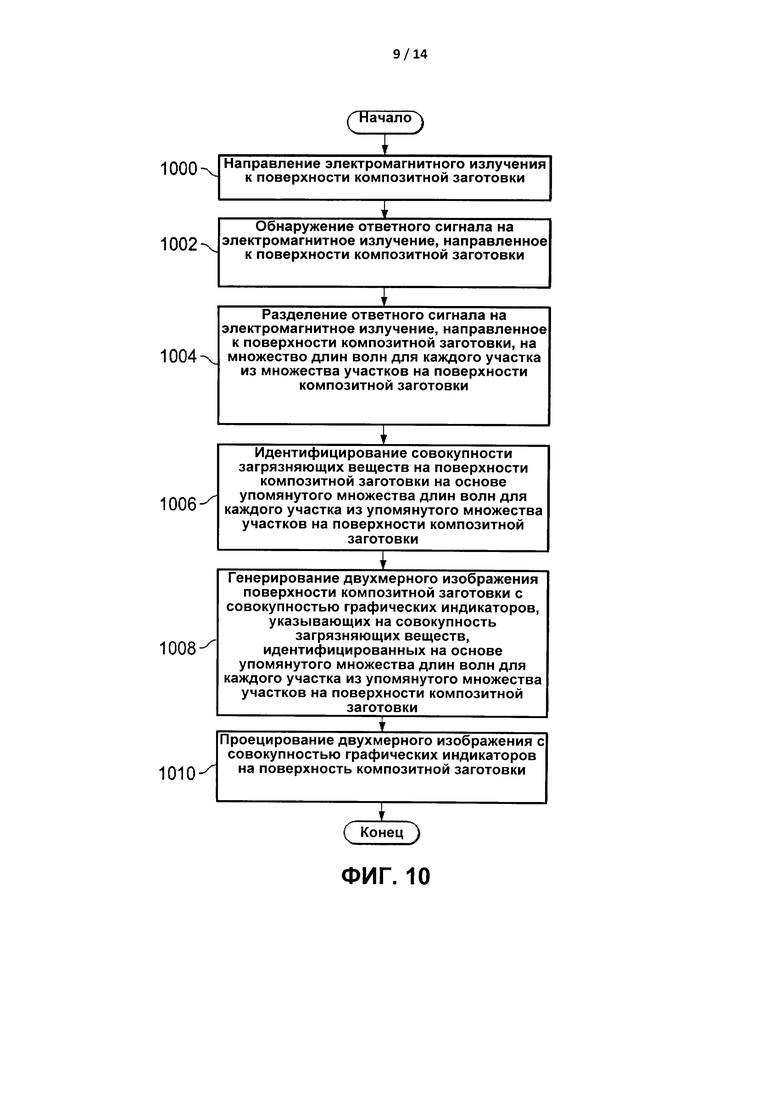
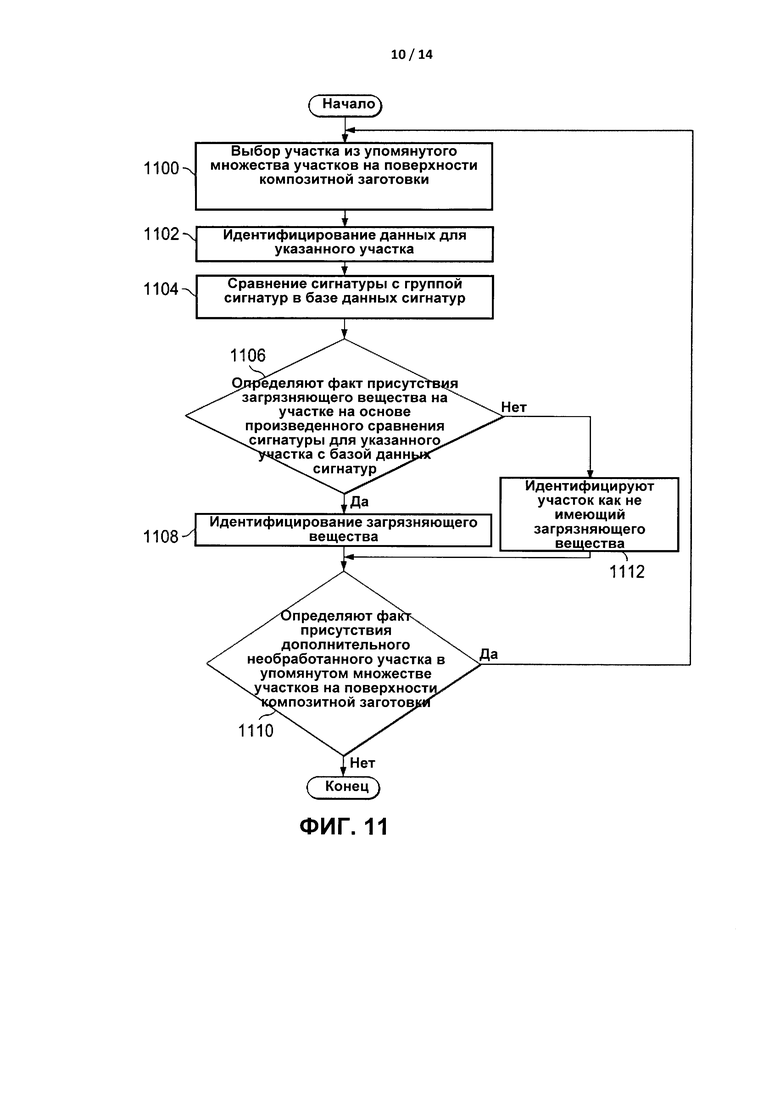
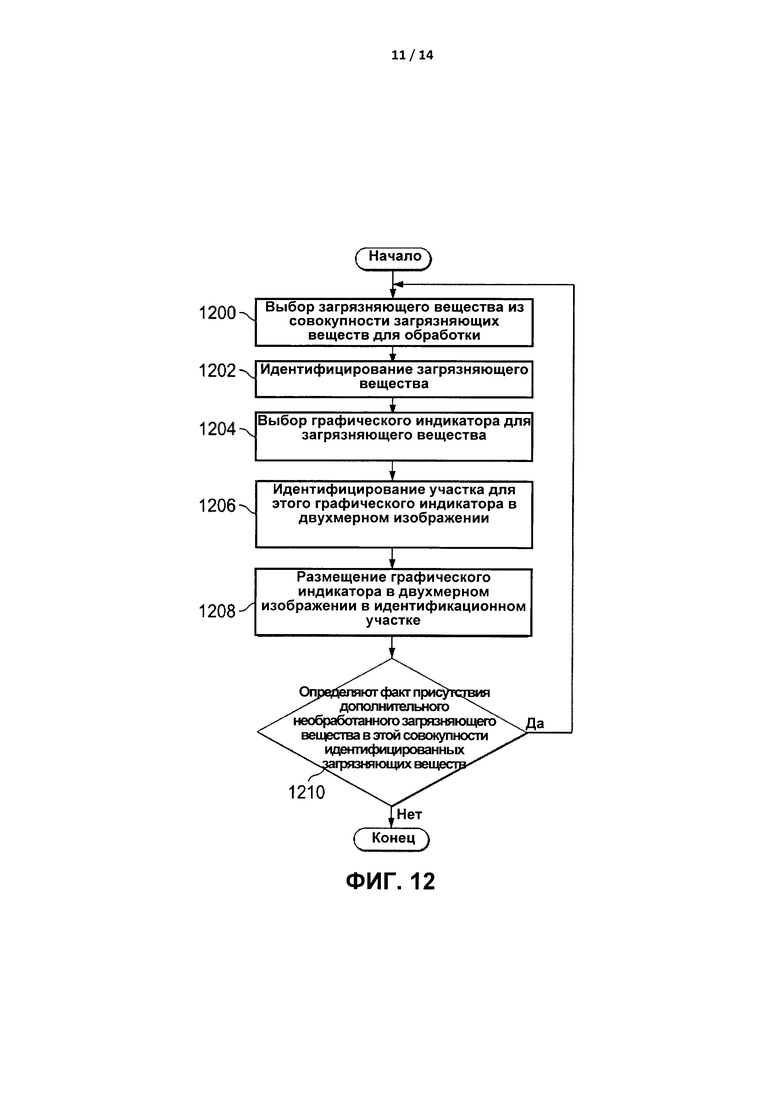
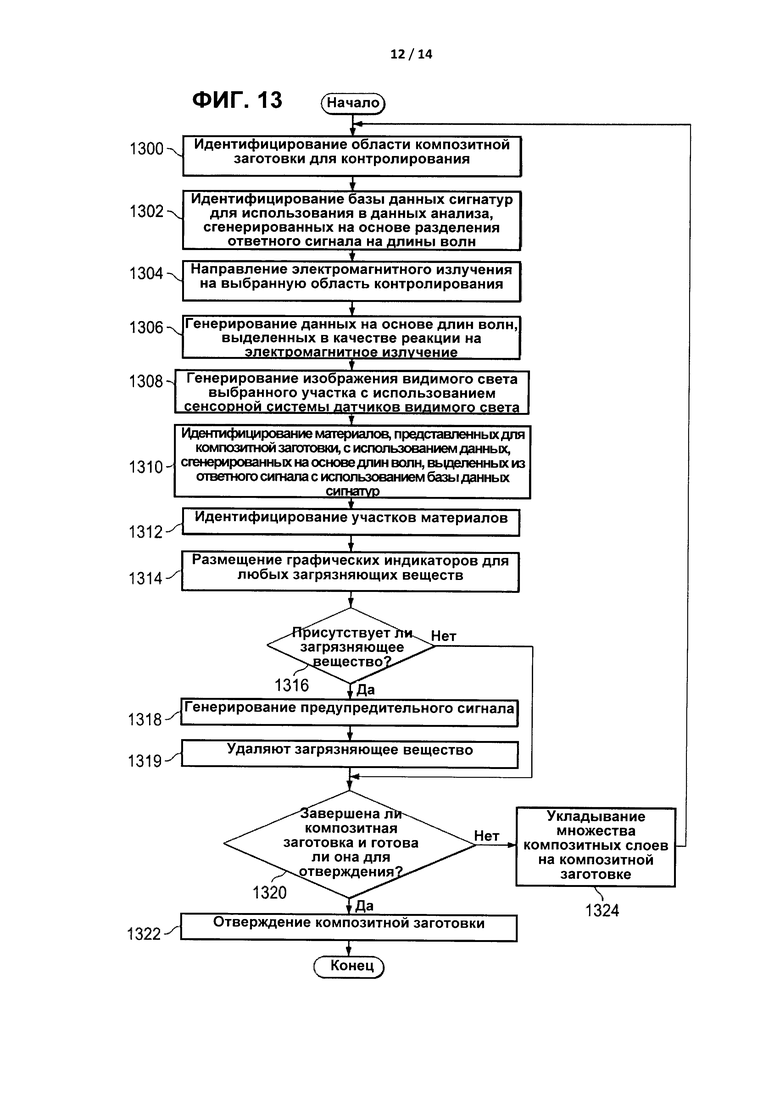
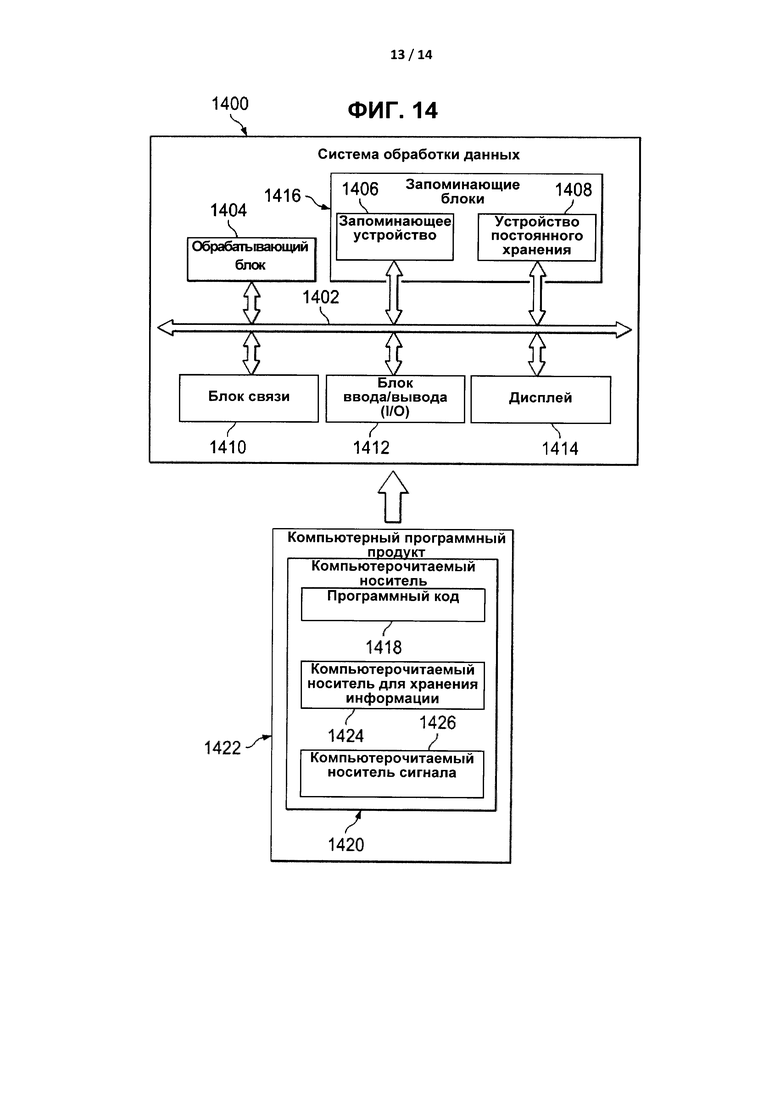
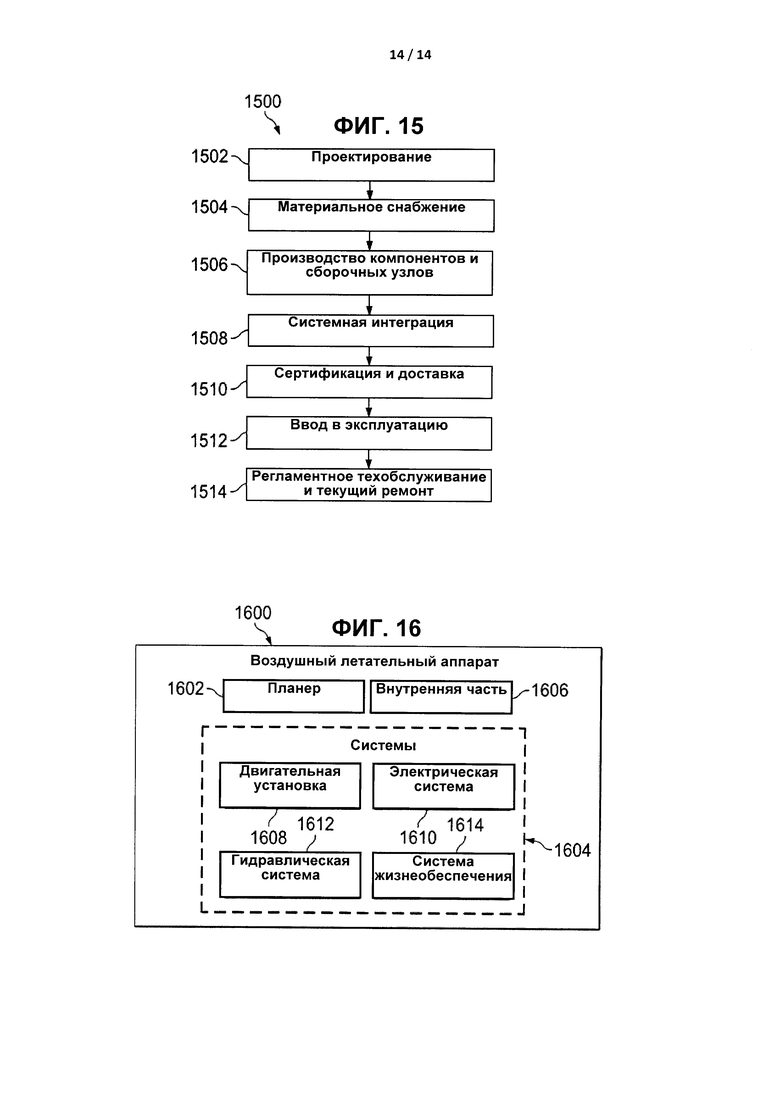
Изобретение относится к изготовлению композитных конструкций, в частности к способам контроля композитных заготовок во время изготовления. Способ контроля композитной заготовки и способ контроля рабочего органа для укладки композитного материала включают: направление на контролируемую поверхность электромагнитного излучения, прием отраженного от каждого участка поверхности ответного сигнала, разделение принятого сигнала на множество длин волн, идентификацию невидимых невооруженным глазом загрязняющих веществ и генерирование изображения поверхности с графическими индикаторами, указывающими на наличие загрязняющих веществ. Устройство для контроля композитных конструкций содержит спектральную сенсорную систему, выполненную с возможностью разделения сигнала, отраженного от поверхности, на множество длин волн, а также с возможностью генерирования данных на основе указанного множества длин волн. Устройство также включает анализатор, выполненный с возможностями управления сенсорной системой и формирования изображения поверхности заготовки с совокупностью графических индикаторов, указывающих на наличие загрязняющих веществ. 4 н. и 16 з.п. ф-лы, 16 ил.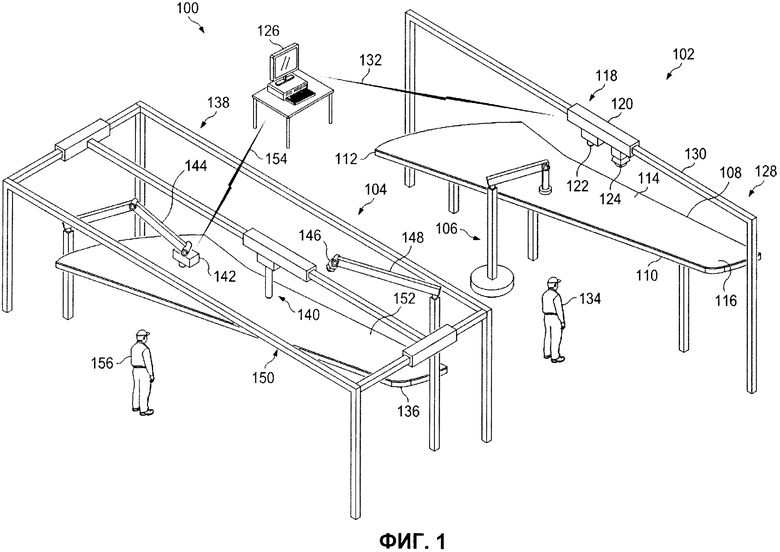
1. Способ контролирования композитной заготовки (206), включающий:
разделение ответного сигнала (228) на электромагнитное излучение (224), направленное к поверхности (212) композитной заготовки (206), на множество длин волн (230) для каждого участка из множества участков (226) на поверхности (212) композитной заготовки (206);
идентифицирование совокупности загрязняющих веществ (210), невидимых невооруженным глазом, на поверхности (212) композитной заготовки (206) на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) и
генерирование двухмерного изображения (236) поверхности (212) композитной заготовки (206) с совокупностью графических индикаторов (242), указывающих на совокупность загрязняющих веществ (210), невидимых невооруженным глазом и идентифицированных на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) композитной заготовки (206).
2. Способ по п. 1, в котором идентифицирование совокупности загрязняющих веществ (210), невидимых невооруженным глазом, на поверхности (212) композитной заготовки (206) на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) включает:
идентифицирование совокупности загрязняющих веществ (210), невидимых невооруженным глазом, на основе сравнения упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) композитной заготовки (206) с данными (232) базы длин волн для известных загрязняющих веществ.
3. Способ по п. 1, кроме того включающий:
проецирование двухмерного изображения (236) с совокупностью графических индикаторов (242) на поверхность (212) композитной заготовки (206).
4. Способ по п. 1, в котором генерирование двухмерного изображения (236) поверхности (212) композитной заготовки (206) с совокупностью графических индикаторов (242), указывающих на совокупность загрязняющих веществ (210), невидимых невооруженным глазом и идентифицированных на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) композитной заготовки (206), включает:
генерирование двухмерного изображения (236) поверхности (212) композитной заготовки (206) с использованием сенсорной системы (302) датчиков видимого света и
включение совокупности графических индикаторов (242), указывающих на совокупность загрязняющих веществ (210), невидимых невооруженным глазом и идентифицированных на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) композитной заготовки (206), в двухмерное изображение (236) в участках, соответствующих упомянутому множеству участков (226).
5. Способ по п. 1, в котором композитная заготовка (206) содержит множество слоев композитного материала.
6. Способ по п. 1, в котором этапы разделения, идентифицирования и генерирования выполняют при укладке множества слоев композитного материала для композитной заготовки (206).
7. Способ по п. 6, в котором этапы разделения, идентифицирования и генерирования выполняют каждый раз при укладке множества слоев композитного материала для композитной заготовки (206) перед отверждением множества слоев композитного материала.
8. Способ по п. 1, в котором этапы разделения, идентифицирования и генерирования выполняют перед отверждением композитной заготовки (206).
9. Способ по п. 1, в котором разделение ответного сигнала (228) на электромагнитное излучение (224), направленное к поверхности (212) композитной заготовки (206), на множество длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) композитной заготовки (206) включает:
сканирование ответного сигнала (228) на электромагнитное излучение (224) через фильтр (310), причем фильтр (310) выполнен с возможностью разделения ответного сигнала (228) на упомянутое множество длин волн (230).
10. Способ по п. 9, в котором фильтр (310) является интерференционным фильтром (314).
11. Способ по п. 1, в котором электромагнитное излучение (224) генерируют посредством по меньшей мере одного из следующего: лазерная система, галогенная система, светодиодная система, система на основе электрической дуги в атмосфере ксенона, диодная лазерная система, лазерная система с перестройкой частоты и система на основе кварцевой лампы.
12. Способ по п. 1, в котором композитная заготовка (206) образует часть инструментального комплекса (220), выбранного из следующего: передвижной инструментальный комплекс, стационарный инструментальный комплекс, конструкция наземного базирования, конструкция морского базирования, конструкция космического базирования, надводный корабль, танк, военное транспортное средство для перевозки личного состава, поезд, космический летательный аппарат, космическая станция, спутник, подводная лодка, автомобиль, энергетическая установка, мост, дамба, производственное сооружение и здание.
13. Способ контролирования рабочего органа (204) для укладки слоев композитного материала, включающий:
разделение ответного сигнала (228) на электромагнитное излучение (224), направленное к поверхности (212) рабочего органа (204), на множество длин волн (230) для каждого участка из множества участков (226) на поверхности (212) рабочего органа (204) перед укладкой слоев композитного материала на поверхность (212) рабочего органа (204);
идентифицирование совокупности загрязняющих веществ (210) на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) рабочего органа (204) и
генерирование двухмерного изображения (236) поверхности (212) рабочего органа (204) с совокупностью графических индикаторов (242), указывающих на совокупность загрязняющих веществ (210), идентифицированных на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) рабочего органа (204).
14. Способ контролирования композитного материала, включающий:
разделение ответного сигнала (228) на инфракрасное электромагнитное излучение (224), направленное к поверхности (212) композитного материала, на множество длин волн (230) инфракрасного излучения для каждого участка из множества участков (226) на поверхности (212) композитного материала;
идентифицирование совокупности несоответствий для композитного материала на основе упомянутого множества длин волн (230) инфракрасного излучения для указанного каждого участка из упомянутого множества участков (226) и
генерирование двухмерного изображения (236) композитного материала с совокупностью графических индикаторов (242), указывающих на совокупность несоответствий, идентифицированных на основе упомянутого множества длин волн (230) инфракрасного излучения для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) композитного материала.
15. Способ по п. 14, в котором композитный материал выбирают из слоя композитного материала в композитной заготовке (206) и слоя композитного материала перед использованием для формирования композитной заготовки (206).
16. Устройство для контроля композитных конструкций, содержащее:
спектральную сенсорную систему (300), выполненную с возможностью разделения ответного сигнала (228) на электромагнитное излучение (224), направленное к поверхности (212) композитной заготовки (206), на множество длин волн (230) и генерирования данных (232) на основе упомянутого множества длин волн (230) электромагнитного излучения (224); и
анализатор (222), выполненный с возможностью вызывать генерирование спектральной сенсорной системой (300) данных (232) на основе ответного сигнала (228) после укладки множества слоев композитного материала для композитной заготовки (206) и перед отверждением упомянутого множества слоев композитного материала и генерировать двухмерное изображение (236) поверхности (212) композитной заготовки (206) с совокупностью графических индикаторов (242), указывающих на совокупность загрязняющих веществ (210), идентифицированных на основе упомянутого множества длин волн (230) для каждого участка из множества участков (226) на поверхности (212) композитной заготовки (206).
17. Устройство по п. 16, кроме того содержащее:
сенсорную систему (302) датчиков видимого света, выполненную с возможностью генерирования изображения видимого света поверхности (212) композитной заготовки (206), причем
анализатор (222) выполнен с возможностью включения совокупности графических индикаторов (242), указывающих на совокупность загрязняющих веществ (210), идентифицированных на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) композитной заготовки (206), в изображение видимого света в участках, соответствующих упомянутому множеству участков (226), для формирования двухмерного изображения (236) поверхности (212) композитной заготовки (206) с совокупностью графических индикаторов (242), указывающих на совокупность загрязняющих веществ (210), идентифицированных на основе упомянутого множества длин волн (230) для указанного каждого участка из упомянутого множества участков (226) на поверхности (212) композитной заготовки (206).
18. Устройство по п. 16, кроме того содержащее:
источник (218) электромагнитного излучения, выполненный с возможностью создания электромагнитного излучения (224).
19. Устройство по п. 16, в котором спектральная сенсорная система (300) содержит:
фильтр (310), выполненный с возможностью разделения ответного сигнала (228) на электромагнитное излучение (224), направленное к поверхности (212) композитной заготовки (206), на упомянутое множество длин волн (230); и
матрицу (312) датчиков, выполненную с возможностью генерирования данных (232) на основе упомянутого множества длин волн (230) электромагнитного излучения (224), выделенных в ответном сигнале (228) фильтром (310).
20. Устройство по п. 16, в котором композитная заготовка (206) является композитной частью воздушного летательного аппарата.
| EP 2056095 А1, 06.05.2009 | |||
| US 4030827 A1, 21.06.1977 | |||
| МИНЕРАЛЬНАЯ ВАТА ИЗ ПОДЛЕЖАЩИХ ПОВТОРНОМУ ИСПОЛЬЗОВАНИЮ МАТЕРИАЛОВ | 2011 |
|
RU2575189C2 |
| JP 2009109492 A, 21.05.2009 | |||
| US 20040021856 A1, 05.02.2004 | |||
| WO 2006093703 A1, 08.09.2006 | |||
| Устройство для предотвращения раскачивания груза | 1987 |
|
SU1503206A1 |

