ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
Настоящая заявка испрашивает преимущество и приоритет согласно заявке на патент США №14/100735, поданной 9 декабря 2013 г., содержание которой полностью включено в настоящую заявку посредством ссылки.
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к способу и системе для оценки местоположения буровой скважины.
ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Некоторые системы буровых скважин, особенно включающие в себя наклонные или горизонтальные участки, как правило, требуют некоторой формы мониторинга, чтобы избежать пересечения буровых скважин. Например, системы гравитационного дренажа с применением пара (SAGD) включают в себя нагнетательную скважину, обеспечивающую источник тепла (например, пара) для нагрева битума и/или тяжелой нефти, и эксплуатационную скважину для сбора и добычи битума и/или тяжелой нефти. Обычно выдерживается параллельность буровых скважин на заданном расстоянии друг от друга. Таким образом, необходимо использовать мониторинг или определение местоположения, обеспечивающие точность направленного бурения скважин.
КРАТКОЕ ИЗЛОЖЕНИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
В настоящем изобретении предлагается способ оценки местоположения буровой скважины, включающий в себя: размещение акустического датчика в первой буровой скважине в формации, причем акустический датчик имеет несколько точек измерения, расположенных по длине первой буровой скважины; бурение буровым ставом части второй буровой скважины в формации; прием распределенных данных акустических измерений во время бурения от нескольких точек измерения, причем данные акустических измерений, по меньшей мере отчасти, основаны на акустическом сигнале, генерированным буровым ставом и обнаруженным в нескольких точках измерения, и включают в себя несколько сейсмотрасс, каждая из которых связана с отличающимся местоположением вдоль первой скважины; обработку данных измерений для оценки расстояния между буровым ставом и акустическим датчиком, причем обработка данных включает в себя взаимную корреляцию нескольких сейсмотрасс и расчет максимума взаимной корреляции, связанной с каждой сейсмотрассой, генерирование графика максимума взаимной корреляции; и оценку указанного расстояния на основе вершины графика; и управление параметрами направления бурения исходя из расстояния.
В настоящем изобретении также предлагается система оценки местоположения буровой скважины, включающая в себя: акустический датчик, размещенный в первой буровой скважине в формации, и имеющий несколько точек измерения, расположенных по длине первой буровой скважины; процессор, сконфигурированный на: прием данных акустических измерений от нескольких точек измерения во время бурения буровым ставом части второй буровой скважины в пласте, причем данные акустических измерений, по меньшей мере отчасти, основаны на акустическом сигнале, генерированном буровым ставом и обнаруженным в нескольких точках измерения, и включают в себя несколько сейсмотрасс, каждая из которых связана с отличающимся местоположением вдоль первой скважины; и обработку данных измерений для оценки расстояния между буровым ставом и акустическим датчиком, причем обработка данных включает в себя взаимную корреляцию нескольких сейсмотрасс и расчет максимума взаимной корреляции, связанной с каждой сейсмотрассой, генерирование графика максимума взаимной корреляции; и оценку указанного расстояния на основе вершины графика.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Следующие описания не следует рассматривать как ограничение объема изобретения каким-либо образом. Со ссылкой на прилагаемые чертежи, одинаковые позиции пронумерованы одинаково.
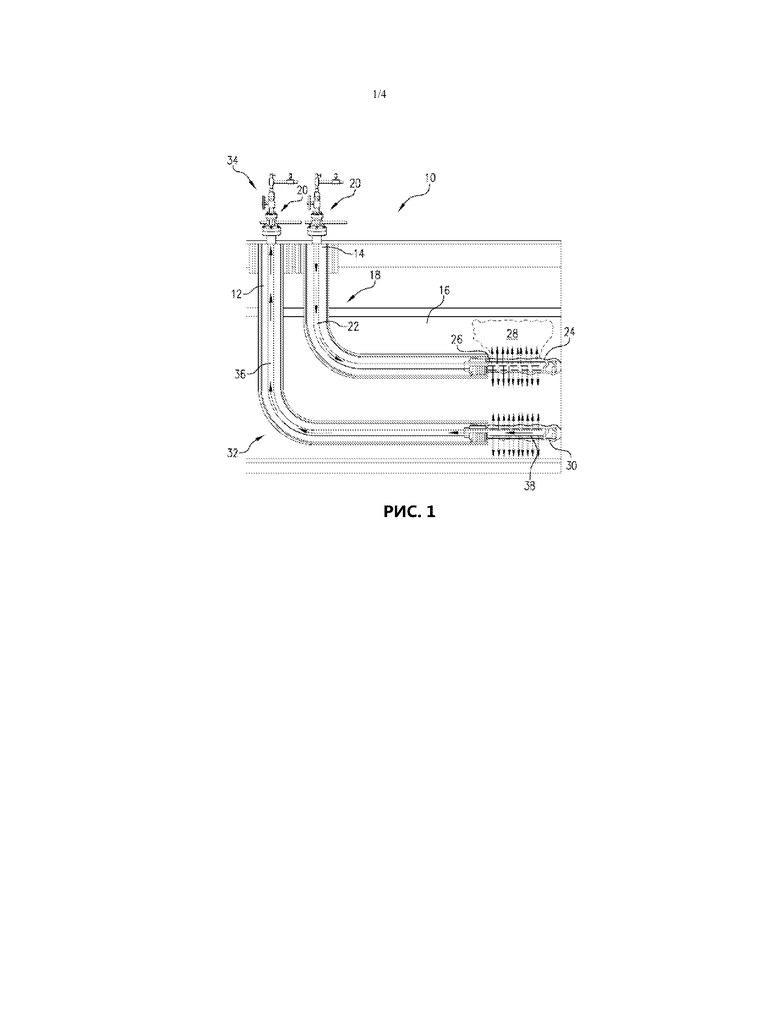
На РИС. 1 представлено изображение примера осуществления системы эксплуатации скважины.
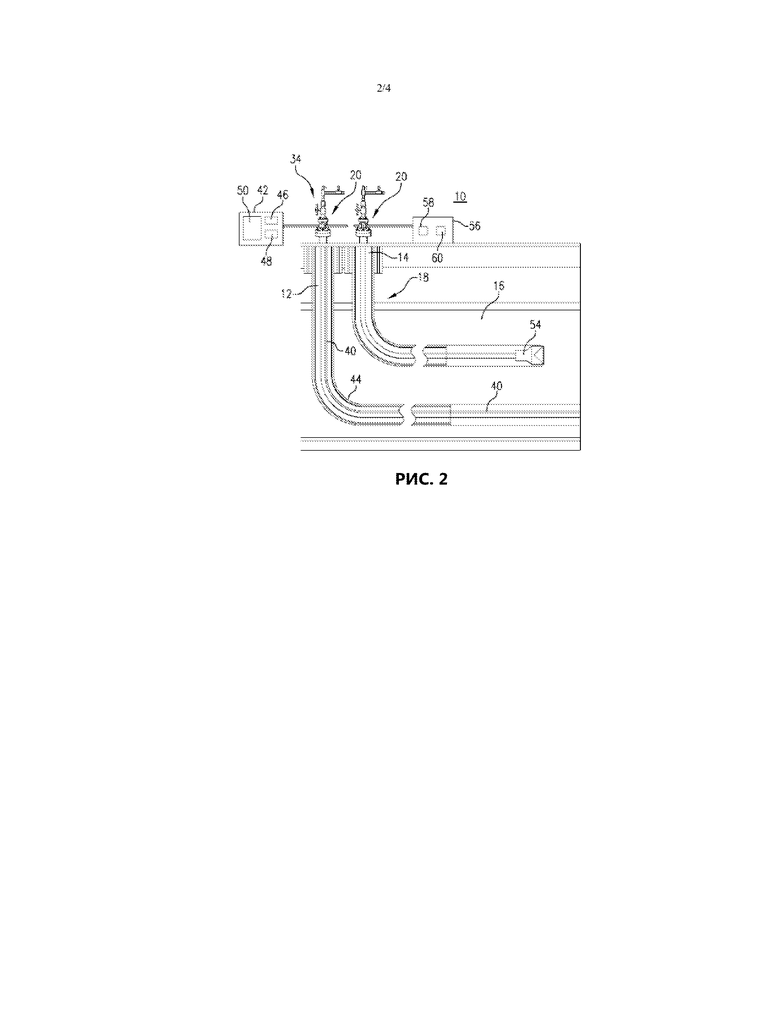
На РИС. 2 представлено изображение примера осуществления блока измерения, определяющего местоположение буровой скважины во время бурения.
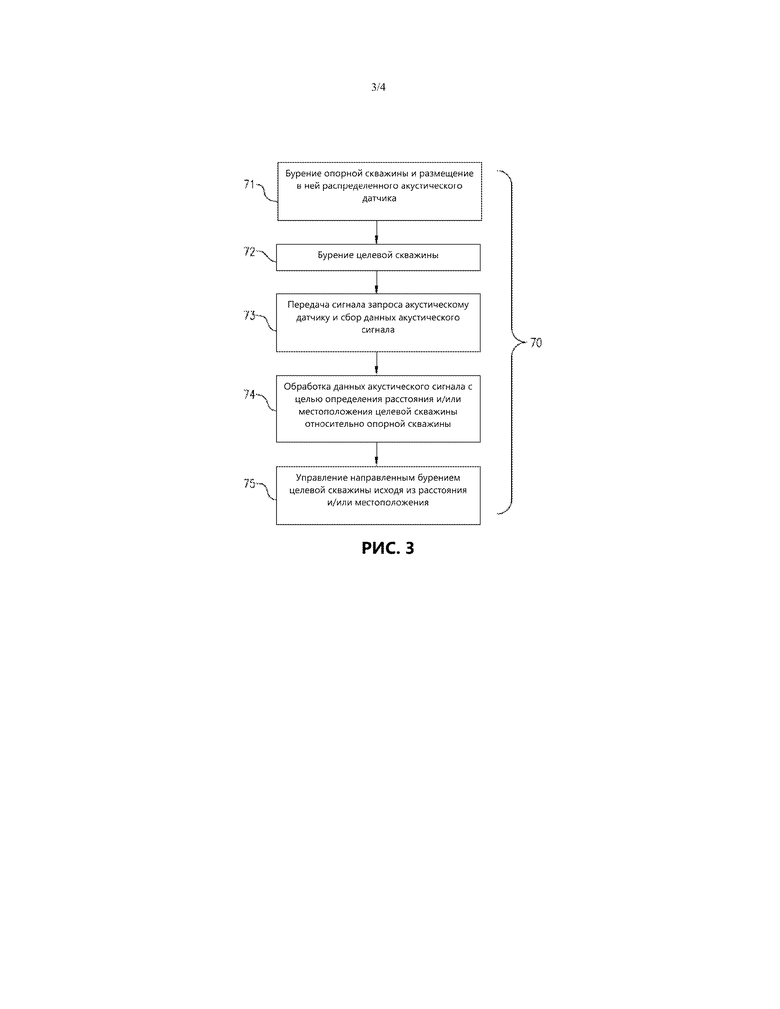
На РИС. 3 представлено изображение блок схемы примерного способа определения местоположения буровой скважины во время бурения.
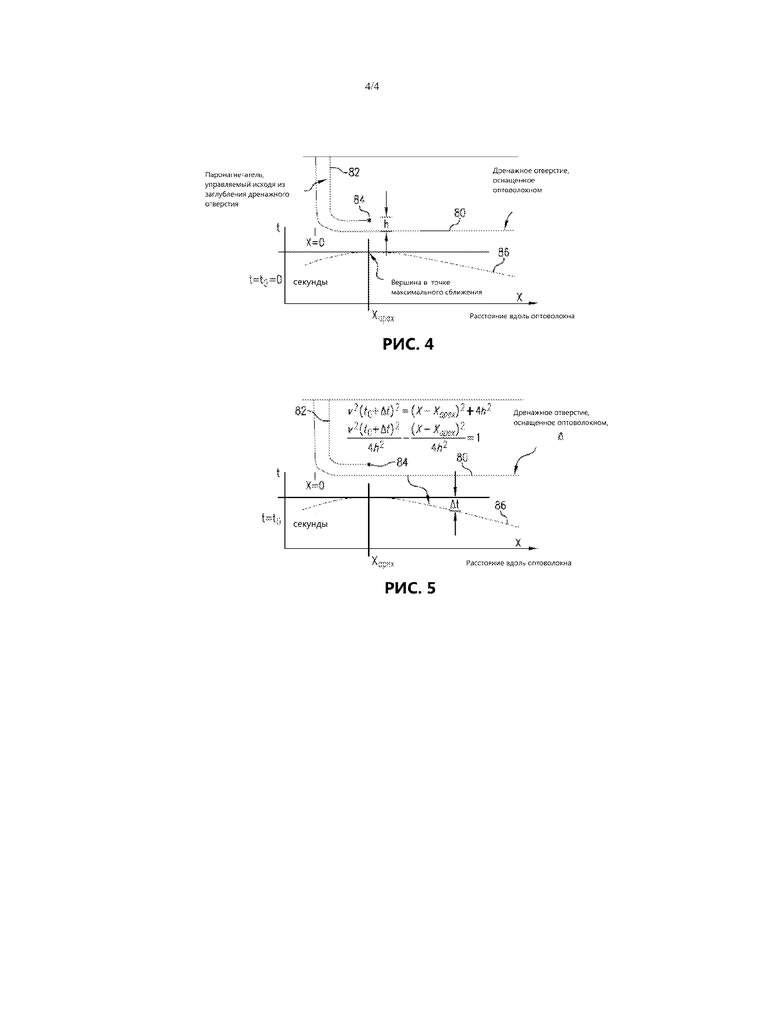
На РИС. 4 представлен график корреляционных значений для распределенного акустического датчика в исходной буровой скважине исходя из акустических сигналов принятых от бурового става в пробуриваемой скважине.
На РИС. 5 представлен график корреляционных значений для распределенного акустического датчика в исходной буровой скважине исходя из акустических сигналов принятых от бурового става в пробуриваемой скважине.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На РИС. 1 представлен пример осуществления системы 10 буровых скважин. В данном варианте осуществления, система 10 представляет собой производственную систему способную использовать гравитационный дренаж с применением пара (SAGD), не ограничивая этим объем изобретения. Система 10 способна выполнять любую энергоемкую операцию с использованием нескольких буровых скважин, такую как интенсификация притока, бурение, геонавигация, заканчивание скважины, измерение параметров, мониторинг и/или операции по оценке пласта. В дополнение к нефтяной и энергетической промышленности система может использоваться в других отраслях для направленного бурения и позиционирования скважин, например геотермальных скважин.
В данном варианте осуществления, система 10 включает в себя первую буровую скважину 12 и вторую буровую скважину 14 в формации 16. В одном варианте осуществления, формация содержит битум, тяжелую сырую нефть и/или другие нетрадиционные отложения углеводородов, такие как нефтеносные пески и сланцы. Как описано в настоящем документе, "буровая скважина" или "ствол скважины" представляют собой одноствольную скважину, которая составляет всю или часть пробуренной скважины. Как описано в настоящем документе, "пласты" относятся к различным свойствам и материалам, которые вскрываются в геологических породах. Соответственно, следует учитывать, поскольку термин "пласты" в целом относится к исследуемым геологическим формациям, что под термином «пласты», используемом в данном описании, в некоторых случаях, понимают любые геологические разрезы или изучаемые области (например, площадь исследований).
Вторая буровая скважина 14 включает в себя: паронагнетательный узел 18 с нагнетающим клапаном в сборе 20, подающий пар от источника тепла (не показан); паровой трубопровод 22 и паронагнетатель 24. Паронагнетатель 24 получает пар по паровому трубопроводу 22 и выбрасывает пар через множество отверстий, например прорезей 26 в окружающий участок 28 пласта. Битум в участке 28 нагревается, уменьшается его вязкость, и он стекает под действием силы тяжести в коллектор 30.
Оборудование устья эксплуатационной скважины 32 добычи располагается в первой буровой скважине 12 и включает в себя эксплуатационную задвижку 34, соединенную с эксплуатационным трубопроводом 36. После прогрева участка 28 битум стекает в коллектор 30 через множество отверстий, например, прорези 38, и течет по эксплуатационному трубопроводу 36 к эксплуатационной задвижке 34 и далее в соответствующую емкость или в другое место (не показано).
В данном варианте осуществления, по меньшей мере, часть буровых скважин 12 и 14 представляет собой параллельные горизонтальные скважины. В других вариантах осуществления настоящего изобретения, буровые скважины 12, 14 могут простираться в вертикальном направлении, направлении по горизонтали и/или наклонно, относительно друг друга.
На РИС. 2, вариант осуществления системы геонавигации, измерения параметров и/или системы мониторинга включает в себя блок измерения параметров, размещаемый в первой скважине и определяющий местоположение второй скважины во время бурения второй скважины. Система измерений также способна осуществлять скважинные измерения свойств первой скважины и/или пласта. Система измерений включает в себя акустический датчик. Акустический датчик включает в себя один или несколько дискретных датчиков или компоновочный блок распределенного считывания, который содержит несколько дискретных датчиков или распределенный акустический датчик, например, оптоволоконный распределенный акустический датчик (DAS).
В одном варианте осуществления система измерения включает в себя оптоволоконный датчик 40 с одним или несколькими оптическими волокнами. По меньшей мере, одно оптическое волокно, выполненное в виде оптоволоконного датчика DAS, принимает сигнал запроса от опрашивающего устройства 42 (или другого источника сигнала) и генерирует отраженные сигналы, которые анализируются для оценки акустических свойств. Система 10 может включать в себя оптоволоконные компоненты, выполняющие различные функции в системе 10, например, функции связи и считывания различных дополнительных параметров. Примерные дополнительные параметры представляют собой: температуру, давление, усилие, относительную деформацию, вибрацию скважинных компонентов и деформацию скважинных компонентов. Оптоволоконный датчик 40 выполняется в виде кабеля или другого удлинительного элемента и может осуществлять дополнительные функции, например, усиления и/или защиты слоев или элементов, а также дополнительных проводников, например, электрических проводников и дополнительных оптических волокон для зондирования и/или связи.
Оптическое волокно или оптоволоконный датчик DAS размещается в буровой скважине с помощью любого подходящего носителя.
Оптическое волокно оптоволоконного датчика 40 включает в себя одну или несколько точек считывания, расположенных по длине оптоволоконного датчика 40. Примерами точек считывания являются: волоконная решетка Брэгга (FBG), зеркала, резонаторы Фабри-Перо и точки собственного рассеяния. Точки собственного рассеяния включают точки или участки оптоволокна, отражающие сигналы запроса, например, точки рассеяния Рэлея. Оптоволоконный датчик 40 может размещаться на эксплуатационном трубопроводе 36, на обсадной трубе 44 (например, сцементированный с обсадной трубой 44) или любом другом подходящем месте на временной или постоянной основе.
Опрашивающее устройство 42 способно передавать электромагнитный сигнала запроса в оптоволоконный датчик 40 и принимать отраженный сигнал от одной или нескольких точек в оптоволоконном датчике 40. Опрашивающее устройство 42 включает в себя компоненты: источник 46 сигнала (например, импульсный источник света, светодиод, лазер и т.д.) и детектор 48 сигнала. В одном варианте осуществления процессор 50 находится в функциональной связи с источником 46 сигнала и детектором 48 сигнала и способен управлять источником 46, и принимать отраженный сигнал от детектора 48. Примером опрашивающего устройства является рефлектометр, работающий, например, по принципу частотной оптической рефлектометрии (OFDR) и/или оптической временной рефлектометрии (OTDR). Типы и конфигурации компонентов не ограничиваются описанными в настоящем документе и приведены на РИС. 1. Например, акустический датчик (ы), описанные здесь, могут представлять собой оптоволоконные датчики, или решетки дискретных датчиков (например, пьезоэлектрические датчики и/или геофоны), упорядоченные по длине буровой скважины 12. Типичными дискретными датчиками являются многоосные датчики, например, трехосные датчики, позволяющие осуществлять направленное акустическое зондирование в трех ортогональных направлениях или по ряду направлений.
В одном варианте осуществления оптоволоконный датчик 40 выполнен в виде распределенного акустического датчика (DAS), включающего в себя, по меньшей мере, одно оптическое волокно распределенного акустического датчика (DAS), например, одномодовое оптоволокно, соединенное с опрашивающим устройством 42. Распределенное акустическое зондирование (DAS) использует импульсы света от высококогерентного источника электромагнитного излучения (например, лазера) для измерения вибрации, воспринимаемой оптоволокном, например, оптоволокном DAS. Свет в волокне, по своей природе, подвергается рассеянию Рэлея при его распространении вдоль оптоволокна, а рассеяние света от различных участков оптоволокна оказывает взаимное влияние друг на друга. С точки зрения временных вариаций в этой интерференции сигналов, DAS может использоваться для измерения акустических колебаний, обнаруженных оптоволокном, поскольку оно подвергается меняющийся во времени относительной деформации.
В одном варианте осуществления, система измерений, в том числе с акустическим датчиком в первой буровой скважине, соединена или является частью системы геонавигации и способна определять местоположение второй буровой скважины относительно первой буровой скважины, например, при бурении второй буровой скважины. Эта система пригодна, например, при удержании второй буровой скважины в пределах участка или исследуемого пласта, при направленном бурении вдоль выбранной траектории, избегая пересечений второй буровой скважины с первой буровой скважиной. Кроме того, система измерений может использоваться для мониторинга и/или измерений параметров после окончания бурения второй буровой скважины. Например, оптоволокно DAS системы измерений цементируют в обсадную трубу первой буровой скважины или опускают с эксплуатационной колонной в первую буровую скважину для долгосрочного мониторинга температуры и акустического мониторинга пласта при закачке пара и добыче нефтяных битумов. Измерения местоположения второй буровой скважины относительно первой (опорной) буровой скважины может проводиться и после окончания бурения второй скважины за счет источника акустического сигнала, развернутого во второй скважине с помощью зонда на кабеле или установки с гибкими трубами. Данные наземные измерения можно использовать, например, в качестве вторичных средств проведения съемки траектории второй буровой скважины.
Помимо определения местоположения второй буровой скважины, акустические сигналы могут использоваться для оценки параметров или свойств окружающего пласта. Например, часть оптоволокна DAS (или другой решетки датчиков), например, часть датчика 40, простирающегося в горизонтальном направлении за пределы бурового долота 54, выходит за пределы нахождения бурового долота и принимает акустические сигналы, передаваемые перед долотом. Данные сигналы, принятые с мест расположения датчиков, могут использоваться для оценки параметров пласта впереди долота, обеспечивая тем самым возможность прогнозирования.
Например, как показано на РИС. 2, после окончания бурения первой буровой скважины 12, проводится бурение второй скважины 14 колонной бурильных труб 52, соединенных с буровым ставом, включающим в себя буровое долото 54. Буровой став управляется соответствующим устройством обработки и управления, таким как блок управления 56. Блок управления 56 способен принимать измерительные сигналы (например, давления или расхода, числа оборотов, нагрузки на долото и т.д.) и управлять параметрами бурения, например, числом оборотов, осевой нагрузкой на долото и направлением бурения на основании измерительных сигналов. Блок управления 56 включает в себя такие компоненты, как процессор 58 и запоминающее устройство 60 для приема и обработки данных и/или управления параметрами бурения.
Блок управления 56 принимает данные от опрашивающего устройства 42 относительно местоположения бурового долота 54 или других компонентов в колонне бурильных труб 52, которая, при необходимости, используется блоком управления 56 для направленного бурения. Хотя блок управления 56 и опрашивающее устройство 42 показаны как отдельные устройства, они могут быть объединены в единое устройство или систему измерения/управления.
На РИС. 3 представлен способ 70 проведения бурения, измерения и/или эксплуатационных операций, мониторинга местоположения буровой скважины во время бурения и/или мониторинга добычи нефти из формации. Способ 70 включает в себя один или несколько этапов 71-75. В одном варианте осуществления способ 70 включает в себя выполнение всех этапов 71-75 в описанном порядке. Тем не менее, некоторые этапы могут быть опущены, добавлены или изменена их последовательность. Хотя способ 70 описан в сочетании с узлами измерения, нагнетания и эксплуатационным оборудованием, описанными в данном документе, способ 70 может использоваться в сочетании с любой энергетической промышленной системой или в операциях по обеспечению бурения и геонавигации.
На первом этапе 71, пробуривается первая буровая скважина (опорная скважина) и в ней размещаются распределенный акустический датчик или компоновочный блок распределенного считывания. Например, пробуривается первая буровая скважина 12, например, нижнее или дренажное отверстие пары скважин SAGD, а в буровой скважине 12 размещается оптоволоконный датчик 40 DAS. Оптоволоконный датчик 40 можно опускать в буровую скважину 12 вместе с любым подходящим устройством, например, эксплуатационным трубопроводом 36, либо с отдельным буровым снарядом (например, сигналопроводящей трубой) и/или можно сцементировать или иным образом разместить в обсадной колонне буровой скважины. Например, работы по окончанию буровой скважины 12 начинаются спуском оптического волокна для распределенного акустического зондирования (DAS) и распределенного измерения температуры (DTS).
На втором этапе 72, бурится вторая буровая скважина (также называемая целевой буровой скважиной). Например, вторая буровая скважина 14 пробуривается буровым долотом 54, например, верхнее или паронагнетающее отверстие пары скважин SAGD.
Во время работы буровой став производит акустические сигналы из-за вибраций и/или взаимодействия бурового става и пласта. Например, при вращении бурового долота и взаимодействии с породой пласта, он производит акустические сигналы или вибрации, распространяющиеся в пласте. Другие компоненты бурового става также производят акустические сигналы, например, забойный двигатель. Буровое долото и/или другие компоненты бурового става используются в качестве источника акустических сигналов.
Хотя данный способ описан в связи с определением местоположения бурового долота или другого источника акустических сигналов в процессе бурения, он не является ограничивающим объем настоящего изобретения. Например, акустический сигнал может передаваться от активного источника или другого вибрирующего элемента, расположенного в буровой скважине, например, по каротажному кабелю или колонне бурильных труб. В другом варианте осуществления, источником акустического сигнала служит вибрация элементов или поток среды в эксплуатационной скважине.
На третьем этапе 73, акустические сигналы, генерированные буровым долотом 54 или другими элементами бурового става, отслеживаются путем передачи, по меньшей мере, одного сигнала запроса в оптоволоконный датчик 40, например, оптоволокно DAS в оптоволоконном датчике 40. В одном варианте осуществления, например, несколько импульсов когерентного сигнала запроса передаются в оптоволоконный датчик 40, как часть метода OTDR. Дополнительные сигналы, например, сигналы DTS, могут передаваться в оптоволокно DAS или в оптоволокно, осуществляющее отдельное измерение.
Сигналы, отраженные от точек считывания в оптическом волокне, принимаются рефлектометром от каждого сигнала запроса и/или импульса. Отраженные сигналы оцифровываются для формирования данных сигналов DAS.
Например, для поддержания скважин на постоянном уровне сближения (например, около 5 метров), оптоволокно в опорной скважине используется для измерения акустических сигналов от бурового става и определения расстояния между двумя буровыми скважинами. Во время бурения целевой скважины оптоволокно DAS/DTS опрашивается поверхностным опрашивающим устройством для получения распределенных акустических данных за один или несколько моментов времени или периодов времени. Данные собираются с нескольких мест вдоль оптоволокна DAS, например, через каждые 0,25 метра, 0,5 метра или 1 метр. Данные из каждого места вдоль оптоволокна затем обрабатываются как отдельные временные последовательности или «сейсмотрассы», Tri. Каждая сейсмотрасса связана лишь с местом вдоль скважины, оснащенном контрольно-измерительной аппаратурой.
На четвертом этапе 74, данные сигнала обрабатывается и/или анализируются для определения местоположения бурового долота (например, бурового долота 54), забойного двигателя или другого элемента в целевой буровой скважине, производящего вибрацию.
Параметры сигнала анализируются для определения относительного местоположения элемента колонны бурильных труб, испускающего акустические сигналы в процессе бурения. Например, буровое долото 54 формирует акустический сигнал, в результате взаимодействия с пластом в процессе бурения, который обнаруживается в данных сигнала. Оценке подлежат параметры, включающие в себя: местоположение бурового долота, расстояние между буровым долотом и акустическим датчиком, максимально отображаемую акустическую длину пути и направление. В одном варианте осуществления, оценивается только расстояние или расстояние и направление.
В одном варианте осуществления расстояние «h» между буровым долотом и точкой на оптоволокне DAS рассчитывается исходя из времени прохождения акустического сигнала от бурового долота к оптоволокну. Время прохождения преобразуется в расстояние, благодаря использованию скорости распространения продольной волны в пласте (р-волны).
Скорость распространения продольной волны определяется из любого подходящего источника информации или любым методом. Например, данные измерений, собранные во время или после завершения бурения первой буровой скважины (например, данные кабельного каротажа или данные каротажа в процессе бурения), или в другой буровой скважине на аналогичном участке или пласте используется для определения свойств пласта и скорости распространения волны. В другом варианте осуществления, для определения скорости распространения волны используется анализ скорости сейсмической волны.
В одном из вариантов осуществления, для определения расстояния и/или местоположения бурового долота в целевой буровой скважине, используется взаимный корреляционный анализ распределенных акустических данных. Данный вариант осуществления описан со ссылкой на РИС. 4 и 5, на которых представлена пробуренная опорная буровая скважина 80, в которой размещается оптоволокно распределенного акустического зондирования. Вторая буровая скважина, называемая здесь целевая буровая скважина 82, пробуривается буровым ставом с буровым долотом 84, причем в процессе бурения собираются данные измерений. Примерная опорная буровая скважина 80 включает в себя предварительно пробуренное дренажное отверстие, как часть системы SAGD, а примерная целевая буровая скважина 82 включает в себя паронагнетающее отверстие. Данный анализ не ограничивается системой SAGD, так как она может использоваться как часть процесса бурения, для которого сделано ранее пробуренное отверстие.
В заданном местоположении бурового долота, или для заданного расстояния на которое внедряется буровое долото, данные собираются за выбранный период времени для каждой из нескольких точек, расположенных по длине оптоволокна DAS. Данные предоставляются в виде нескольких сейсмотрасс Tri, для n-го числа местоположений оптоволокон (i=1 до n).
Сейсмотрассы взаимно коррелируются и находится «приращение времени пробега волны» или разность по времени максимума взаимной корреляции (эквивалентно определению стандартных скоростей) приращения. Максимум взаимной корреляции вычисляется для каждой сейсмотрассы.
Как показано на РИС. 4 и 5, график 86 максимума взаимной корреляции относительно числа сейсмотрасс или местоположения (X) сейсмотрассы имеет форму гиперболы. Вершина гиперболы (Харех) рассчитывается, а номер сейсмотрассы, соответствующий Харех, представляет собой местоположение оптоволокна DAS, находящееся ближе всего к источнику акустического сигнала.
В одном варианте осуществления форма локуса X матрицы взаимной корреляции подбирается по следующему гиперболическому уравнению:
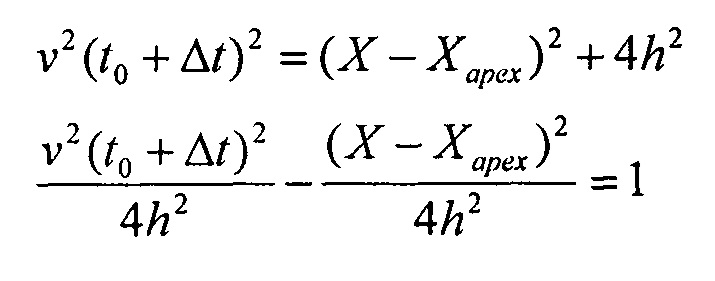
Как уже обсуждалось выше, скорость v распространения звуковой р-волны определяется из различных источников информации. Исходя из подбора, определяется неизвестное время происхождение события (t0), и текущего расстояния (h), например, долота от ближайшего местоположения опорной скважины 80, оснащенной контрольно-измерительной аппаратурой.
Используя значение ν, например, из данных каротажа в процессе бурения или кабельного каротажа, приведенное выше уравнения ограничивается одним неизвестным. Кроме того, расстояние h определяется как h=νt0. Исходя из этих соображений, решается вышеприведенное нелинейное уравнение, например, с помощью предыдущей оценки h (h(Xj-l)), давая текущую оценку h (h(Xj)).
Для каждого периода времени j, выбранного в процессе бурения, рассчитывается значение h, обеспечивая оценку расстояния в режиме реального времени во время бурения. В одном варианте осуществления, для нескольких точек измерения вдоль оптоволокна DAS обновляется скорость распространения волны. Тем не менее, в одном варианте осуществления, ожидается медленное изменение скорости распространения волны и, таким образом, скорость распространения волны не подлежит обновлению в каждой точке измерения.
Для идентификации акустического сигнала и/или определения расстояния между одной или несколькими точками измерений на оптоволокне DAS и буровым долотом может использоваться любой подходящий способ или метод, основанный на измерения акустических сигналов, генерируемых буровым долотом. Например, акустические сигналы от бурового долота могут идентифицироваться путем сравнения каротажных диаграмм акустических волновых картин, связанных с конкретным буровым долотом или типом бурового долота, либо путем сравнения каротажных диаграмм акустических волновых картин, связанных с бурением определенного типа скальной породы или породы пласта.
Данные сигнала анализируются и определяется направление движения бурового долота или другого источника акустического сигнала в целевой буровой скважине. В одном варианте осуществления, для оценки направления используются несколько оптоволокон DAS или другие источники акустического сигнала, например, для проведения триангуляционной съемки в направлении источника. Например, несколько оптоволокон DAS, имеющих различные радиальные или азимутальные местоположения, размещаются в опорной буровой скважине (например, трехмерном пространстве с ортогональными х, у и z осями и осью z параллельной оси ствола буровой скважины, а несколько оптоволокон позиционируются по-разному в плоскости х-у). Несколько оптоволокон может размещаться в или вокруг наружного диаметра обсадной трубы для проведения триангуляционной съемки в направлении источника. В одном варианте осуществления, оптоволокна DAS или другие акустические датчики используются в нескольких скважинах для определения направления, расстояние и местоположения источника акустического сигнала.
В одном варианте осуществления направление на источник акустического сигнала определяется с помощью трехосных или многоосных акустических датчиков или решеток акустических датчиков. Такие датчики могут использоваться вместо или в комбинации с оптоволокном DAS, облегчая определение направления на источник акустического сигнала.
Для улучшения параметров акустического сигнала, например, увеличения амплитуды сигнала или создания каротажных диаграмм акустических волновых картин по источникам, используются различные устройства и/или способы. Буровое долото выбирается на основании величины производимого шума или узнаваемой каротажной диаграммы акустической волновой картины долота. Например, относительно шумное долото, например, гибридное долото, может использоваться для увеличения акустического сигнала.
В другом варианте осуществления, второй источник шума или источник акустического сигнала используется для облегчения идентификации акустического сигнала от бурового долота или другого компонента в целевой буровой скважине. Второй источник акустического сигнала может располагаться в нисходящей скважине, в целевой буровой скважине, в другой буровой скважине или на поверхности. В одном варианте осуществления второй источник акустического сигнала представляет собой активный, легко опознаваемый источник, например, имеющий узнаваемую каротажную диаграмму акустической волновой картины или активируемый в известные моменты времени и/или по известной схеме. Акустический сигнал от бурового долота идентифицируется путем сравнения данных от оптоволокна DAS или других акустических датчиков с известной каротажной диаграммой акустической волновой картины, что позволяет выделить акустический сигнал от бурового долота.
Другие методы усовершенствования включают в себя регулирование работы бурового долота для увеличения шумности или лучшей опознаваемости акустического сигнала. Например, в альтернативном варианте осуществления, работа бурового долота может замедляться или ускоряться, что позволяет получить шаблон сигнала или опознаваемое изменение акустического сигнала. В другом варианте осуществления, процесс бурения останавливается и буровое долото "выбивается" путем перемещения колонны бурильных труб вперед и назад, создавая ударное воздействие о «дно» скважины.
Такие методы усовершенствования акустического сигнала используются в тех случаях, когда акустический шум от долота имеет узкую полосу частот, а взаимокорреляционная функция не имеет явно выраженной вершины. Усовершенствования сигналов могут использоваться для увеличения ширины полосы частот генерируемого шума.
В одном варианте осуществления, в опорную буровую скважину для облегчения измерения расстояния спускаются дополнительные измерительные устройства или системы. Например, активные источники сигнала (например, активные источники акустического сигнала) размещаются в опорной буровой скважине. Для позиционирования активных источников используется любой подходящий носитель, например, сигналопроводящая труба. Активные источники могут использоваться для передачи управляющего сигнала и непосредственно измерять с прослеживанием время прохождения от бурового долота до каждой точки датчика DAS. В изотропном пласте, с точки зрения акустики, это представляет собой простой метод калибровки перемещения относительно времени прохождения. Можно также обобщить анализ и включить анизотропию скорости (Vvertical ≠ Vhorizontal).
На пятом этапе 75 бурение второй скважины может регулироваться исходя из данных о местоположении. Например, параметры режимов бурения можно регулировать в зависимости от отклонения целевой буровой скважины от заданного минимального расстоянии от опорной скважины и/или удерживать целевую буровую скважину параллельно опорной скважине или любой заданной траектории относительно опорной скважины. Кроме того, измерения акустического сигнала могут использоваться в сочетании с другими измерениями параметров пласта.
Хотя варианты осуществления, описанные здесь, включают в себя одну опорную скважину и одну целевую скважину, это не является ограничением объема настоящего изобретения. Для определения местоположения целевой скважины может использоваться любое количество опорных скважин. Например, сборки акустических датчиков могут размещаться в нескольких буровых скважинах, а акустические сигналы из целевой скважины могут обнаруживаться несколькими чувствительными блоками.
Варианты осуществления, описанные здесь, дают ряд преимуществ по сравнению с известным уровнем техники производственных систем. Поскольку датчики, описанные здесь, обнаруживают акустические сигналы, созданные непосредственно вибрацией и/или вращающимися деталями бурового става, то не требуется никаких дополнительных генераторов звуковых колебаний или других элементов, генерирующих акустический сигнал. Таким образом, датчик в сборе может размещаться в пробуренном стволе скважины, снижая сложность системы и уменьшая затраты.
Например, типичные системы управления SAGD требуют спуска магнитного или другого активного источника в первую буровую скважину и управления бурением второго ствола скважины для поддержания заданного расстояния между скважинами, что требует больших затрат времени и средств и одновременного доступа к обеим скважинами для управления бурением. Варианты осуществления, описанные здесь, снижают затраты и время развертывания таких систем.
В поддержку излагаемых здесь описаний используются различные компоненты анализа и/или аналитики, включающие в себя цифровые и/или аналоговые системы. Система содержит такие компоненты, как процессор, накопитель, память, вход, выход, линия связи (проводная, беспроводная, линия гидроимпульсной скважинной телеметрии, оптическая или иная), пользовательские интерфейсы, компьютерные программы, процессоры обработки сигналов (цифровые или аналоговые) и другие подобные компоненты (такие как резисторы, конденсаторы, катушки индуктивности и другие), обеспечивающие эксплуатацию и анализ устройств и способы, описанные здесь, и хорошо известные в отрасли техники, к которой относится данное изобретение. Считается, что данные описания могут быть, но не обязательно, реализованы в сочетании с набором команд, исполняемых компьютерной программой, хранящейся на машиночитаемом носителе, включающем в себя: память (ПЗУ, ОЗУ), оптический диск (CD-ROM) или магнитный носитель (диски, жесткие диски), или любой другой тип, который при выполнении предписывает компьютеру реализовать способ по настоящему изобретению. Данные команды обеспечивают эксплуатацию оборудования, контроль, сбор и анализ данных и другие функции, которые сочтут уместными системный администратор, владелец, пользователь или другой персонал, в дополнение к функциям, описанным в данном описании.
Кроме того, могут встраиваться другие компоненты, обеспечивающие излагаемые здесь варианты осуществления. В поддержку описанных здесь различных вариантов осуществления или в поддержку других функций, выходя за пределы данного описания, могут использоваться: пробоотборная линия, контейнер для выдержки образцов, пробоотборная камера, линия газовой пробы, насос, поршень, источник питания (по меньшей мере, один генератор, дистанционный источник питания и аккумулятор), устройство создания вакуума, подачи давления, хранения в условиях низких температур (т.е. охлаждение) или элемент теплоснабжения, устройство создания тягового усилия (например, поступательного усилия, движущего усилия или вращательного усилия), магнит, электромагнит, датчик, электрод, передатчик, приемник, приемопередатчик, контроллер, оптический блок, электрический блок или электромеханический блок.
[0001] Специалистам сведущим в данной области техники понятно, что различные компоненты или технологии смогут обеспечить некоторые необходимые или полезные функции или признаки. Соответственно, эти функции и признаки, необходимые для поддержки прилагаемой формулы изобретения и ее модификации, признаются, по существу, включенными как часть излагаемых здесь описаний и как часть описанного изобретения.
[0002] Поскольку изобретение описывалось со ссылкой на пример осуществления, то специалистам в отрасли техники, к которой относится данное изобретение, должно быть понятно, что могут быть сделаны различные изменения и могут быть использованы эквиваленты вместо элементов изобретения, без отступления от объема настоящего изобретения. Кроме того, специалистам в данной области техники, очевидно, что вышеупомянутое изобретение может быть далее развито в нескольких вариантах путем адаптации конкретного инструмента, ситуации или материала к принципам изобретения без отступления от его основного объема. Таким образом, предполагается, что изобретение не ограничивается конкретным вариантом осуществления, описанном как наилучший способ осуществления настоящего изобретения, но что изобретение будет включать все варианты осуществления, попадающие в объем прилагаемой формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАСПРЕДЕЛЕННОЕ АКУСТИЧЕСКОЕ ИЗМЕРЕНИЕ ДЛЯ ПАССИВНОЙ ДАЛЬНОМЕТРИИ | 2013 |
|
RU2661747C2 |
| СИСТЕМА БУРЕНИЯ СКВАЖИНЫ С ОБРАТНОЙ СВЯЗЬЮ И ЗАМЕРОМ ГЛУБИНЫ | 2014 |
|
RU2678751C2 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2648743C2 |
| МОНИТОРИНГ ГИДРАВЛИЧЕСКОГО РАЗРЫВА ПЛАСТА | 2010 |
|
RU2537419C2 |
| СКВАЖИННОЕ РАЗМЕЩЕНИЕ ОПТИЧЕСКОГО ВОЛОКНА ДЛЯ СЕЙСМИЧЕСКИХ ИССЛЕДОВАНИЙ | 2013 |
|
RU2612957C2 |
| ПРОГНОЗИРОВАНИЕ БУРИМОСТИ ИСХОДЯ ИЗ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ, ИСПУСКАЕМОГО В ХОДЕ БУРОВЫХ РАБОТ | 2013 |
|
RU2657277C2 |
| СИСТЕМА И СПОСОБ ТЕЛЕМЕТРИИ ДАННЫХ МЕЖДУ СОСЕДНИМИ СКВАЖИНАМИ | 2017 |
|
RU2755609C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ФАЗОВЫХ ДЕБИТОВ МНОГОФАЗНОГО ПОТОКА ДОБЫВАЕМОГО УГЛЕВОДОРОДА | 2022 |
|
RU2790088C1 |
| СИСТЕМА И СПОСОБ КОРРЕКЦИИ НАПРАВЛЕНИЯ СТВОЛА СКВАЖИНЫ НА ОСНОВЕ ПОЛЯ НАПРЯЖЕНИЙ | 2008 |
|
RU2496003C2 |
| БУРЕНИЕ С ОПТИМИЗАЦИЕЙ ДАВЛЕНИЯ НЕПРЕРЫВНОЙ БУРИЛЬНОЙ КОЛОННОЙ НАСОСНО-КОМПРЕССОРНЫХ ТРУБ | 2011 |
|
RU2565299C2 |
Изобретение относится геонавигации при бурении скважин. В частности, предложен способ оценки местоположения буровой скважины, включающий в себя: размещение акустического датчика в первой буровой скважине в формации, причем акустический датчик имеет несколько точек измерения, расположенных по длине первой буровой скважины; бурение буровым ставом части второй буровой скважины в формации; прием распределенных данных акустических измерений во время бурения от нескольких точек измерения, причем данные акустических измерений по меньшей мере отчасти основаны на акустическом сигнале, генерированном буровым ставом и обнаруженном в нескольких точках измерения, и включают в себя несколько сейсмотрасс, каждая из которых связана с отличающимся местоположением вдоль первой скважины; обработку данных измерений для оценки расстояния между буровым ставом и акустическим датчиком, причем обработка данных включает в себя взаимную корреляцию нескольких сейсмотрасс и расчет максимума взаимной корреляции, связанной с каждой сейсмотрассой, генерирование графика максимума взаимной корреляции и оценку указанного расстояния на основе вершины этого графика; и управление параметрами направления бурения исходя из расстояния. Техническим результатом является расширение арсенала средств для мониторинга и определения местоположения скважинного инструмента, обеспечивающих точность направленного бурения скважины. 2 н. и 16 з.п. ф-лы, 5 ил.
1. Способ оценки местоположения буровой скважины, включающий в себя: размещение акустического датчика в первой буровой скважине в формации,
причем акустический датчик имеет несколько точек измерения, расположенных по длине первой буровой скважины;
бурение буровым ставом части второй буровой скважины в формации;
прием распределенных данных акустических измерений во время бурения от нескольких точек измерения, причем данные акустических измерений по меньшей мере отчасти основаны на акустическом сигнале, генерированном буровым ставом и обнаруженном в нескольких точках измерения, и включают в себя несколько сейсмотрасс, каждая из которых связана с отличающимся местоположением вдоль первой скважины;
обработку данных измерений для оценки расстояния между буровым ставом и акустическим датчиком, причем обработка данных включает в себя взаимную корреляцию нескольких сейсмотрасс и расчет максимума взаимной корреляции, связанной с каждой сейсмотрассой, генерирование графика максимума взаимной корреляции и оценку указанного расстояния на основе вершины этого графика; и
управление параметрами направления бурения исходя из расстояния.
2. Способ по п. 1, в котором акустический сигнал генерируется за счет взаимодействия долота бурового става с пластом.
3. Способ по п. 1, в котором обработка данных измерений включает в себя расчет направления к второй буровой скважине исходя из расстояния.
4. Способ по п. 1, в котором обработка данных измерений включает в себя оценку расстояния исходя из времени прохождения акустического сигнала между буровым ставом и акустическим датчиком.
5. Способ по п. 4, в котором обработка данных измерений включает в себя оценку расстояния исходя из времени прохождения акустического сигнала и скорости распространения продольной волны в пласте.
6. Способ по п. 1, в котором каждая из нескольких сейсмотрасс связана с одной из нескольких точек измерений.
7. Способ по п. 6, в котором обработка данных измерений включает в себя осуществление подбора максимума взаимной корреляции, связанного с каждой сейсмотрассой гиперболической функцией, и расчет начала отправки акустического сигнала исходя из подбора.
8. Способ по п. 7, в котором обработка данных измерений включает в себя выбор сейсмотрассы, связанной с вершиной гиперболической функции, и расчет расстояния исходя из времени приема акустического сигнала от выбранной сейсмотрассы и скорости распространения продольной волны в пласте.
9. Способ по п. 1, в котором первая буровая скважина представляет собой одну из нагнетательных скважин и эксплуатационных скважин системы гравитационного дренажа с применением пара (SAGD), а вторая буровая скважина представляет собой другую нагнетательную скважину и эксплуатационную скважину.
10. Система оценки местоположения буровой скважины, включающая в себя:
акустический датчик, размещенный в первой буровой скважине в формации и имеющий несколько точек измерения, расположенных по длине первой буровой скважины;
процессор, сконфигурированный на:
прием данных распределенных рассредоточенных акустических измерений от нескольких точек измерения во время бурения буровым ставом части второй буровой скважины в пласте, причем данные акустических измерений по меньшей мере отчасти основаны на акустическом сигнале, генерированном буровым ставом и обнаруженном в нескольких точках измерения, и включают в себя несколько сейсмотрасс, каждая из которых связана с отличающимся местоположением вдоль первой скважины; и
обработку данных измерений для оценки расстояния между буровым ставом и акустическим датчиком, причем обработка данных включает в себя взаимную корреляцию нескольких сейсмотрасс и расчет максимума взаимной корреляции, связанной с каждой сейсмотрассой, генерирование графика максимума взаимной корреляции и оценку указанного расстояния на основе вершины этого графика.
11. Система по п. 10, в которой акустический сигнал генерируется за счет взаимодействия долота бурового става с пластом.
12. Система по п. 10, в которой акустический датчик включает в себя по меньшей мере одно оптическое волокно распределенного акустического датчика (DAS).
13. Система по п. 10, в которой акустический датчик включает в себя решетку дискретных многоосных акустических датчиков, упорядоченных по длине первой буровой скважины.
14. Система по п. 10, в которой обработка данных измерений включает в себя оценку расстояния исходя из времени прохождения акустического сигнала между буровым ставом и акустическим датчиком и скорости распространения продольной волны в пласте.
15. Система по п. 10, в которой каждая из нескольких сейсмотрасс связана с одной из нескольких точек измерений.
16. Система по п. 15, в которой обработка данных измерений включает в себя осуществление подбора максимума взаимной корреляции, связанного с каждой сейсмотрассой гиперболической функцией, и расчет начала отправки акустического сигнала исходя из подбора.
17. Система по п. 16, в которой обработка данных измерений включает в себя выбор сейсмотрассы, связанной с вершиной гиперболической функции, и расчет расстояния исходя из времени приема акустического сигнала от выбранной сейсмотрассы и скорости распространения продольной волны в пласте.
18. Система по п. 10, в которой первая буровая скважина представляет собой одну из нагнетательных скважин и эксплуатационных скважин системы гравитационного дренажа с применением пара (SAGD), а вторая буровая скважина представляет собой другую нагнетательную скважину и эксплуатационную скважину.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ СКВАЖИНЫ | 2007 |
|
RU2357078C2 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |
| WO 2011047261 A2, 21.04.2011 | |||
| WO 2009146548 A1, 10.12.2009. | |||

