Изобретение относится к области геофизических исследований скважин и может быть использовано при определении пространственных координат забоя скважины в процессе бурения, а так же ранее пробуренных наклонных и горизонтальных скважин.
Известен «Способ определения координат забоя скважины», пат. РФ №2112878, МПК 6 Е21В 47/022, G021V 1/40, опубликован 1998.06.10.
В этом способе задача определения координат забоя скважины решается на основе данных, получаемых путем регистрации времени распространения акустических сигналов, возбуждаемых импульсным источником, до сейсмоприемника, расположенного на забое скважины.
Акустические сигналы возбуждают на дневной поверхности в районе устья скважины как минимум в четырех точках с заданными координатами. Сейсмоприемник устанавливают в забой скважины и регистрируют время распространения акустических сигналов от каждой точки возбуждения до забоя. После проведения измерений времени распространения акустических сигналов от всех заданных точек возбуждения до сейсмоприемника, размещенного на забое скважины, результаты аппроксимируют уравнением гиперболоида, из которого затем вычисляют координаты забоя скважины по известным формулам.
К существенным недостаткам данного способа относятся то, что применяется он для пробуренных скважин. Второй недостаток в том, что здесь определяются только горизонтальные координаты X и Y.
Известен «Метод решения навигационной задачи по сейсмическим данным ВСП ПБ», жур. «Геофизика» №5, 2000 г., с.16-20.
Здесь обосновывается адаптивный метод решения навигационной задачи, т.е. задачи определения координат забоя скважины в процессе бурения. Для этого используется сеть приемников упругих колебаний от источников, расположенных под поверхностью на некоторой глубине. Основной информацией для решения задачи о нахождении координат источника является время прихода сигнала от источника до приемников.
Для решения навигационной задачи полученные данные обрабатываются с применением специализированного пакета программ. Координаты источника определяют из решения системы уравнений адаптивным методом.
Недостатками данного способа являются то, что здесь определяется время прихода прямых волн от источника колебаний к сейсмоприемнику. Низкое отношение сигнал/помеха в получаемой информации в большинстве случаев не позволит с необходимой для практики достоверностью выделить прямую волну и соответственно обеспечить приемлемую точность определения времени прихода к сейсмоприемнику прямых волн от источника колебаний даже с применением специализированных средств обработки.
Целью предлагаемого изобретения является повышение точности определения траектории пробуренной скважины или пространственных координат забоя скважины в процессе бурения на основе того, что по исходным данным определяется не время прихода сигнала к каждому из датчиков, а временной сдвиг между зарегистрированными сигналами. Для определения сдвига между сигналами нет необходимости определять момент прихода их к датчику, достаточно того, чтобы они находились в одном временном интервале. Цель достигается тем, что для определения траектории скважины сигнал от источника колебаний принимается датчиками, расположенными вдоль линий, крайние датчики на которых размещаются так, что перпендикуляр из источника колебаний проходит между ними.
Способ реализуется следующим образом.
На поверхности земли располагают сейсмические датчики вдоль некоторых линий, и в частности прямых. Линию датчиков располагают так, чтобы перпендикуляр, проведенный к прямой, соединяющей крайние датчики, проходил между этими датчиками. При этом определяются координаты каждого датчика. Таких линий должно быть не менее двух, и они не должны быть параллельны между собой. При бурении скважины буровой инструмент, взаимодействуя с породой, возбуждает в окружающей среде (породе) механические колебания. Эти колебания, распространяясь по породе, достигают сейсмических датчиков, расположенных вдоль некоторых линий на поверхности земли. Датчики преобразуют механические колебания среды в аналоговые электрические сигналы, которые затем преобразуются в цифровой код и передаются на регистрирующее устройство. В качестве регистрирующего устройства может использоваться персональный компьютер (ПК).
Поскольку расстояние между датчиками и источником колебаний, т.е. между датчиками и забоем скважины, в общем случае будет различным, то и время прихода колебаний к каждому датчику от источника колебаний соответственно будет различным. Равенство времен прихода волны к датчикам будет свидетельствовать о равной удаленности их от источника колебаний, т.е. от забоя скважины. Из множества датчиков на одной из линий можно найти, по крайней мере, два, время прихода волны к которым будет одинаковым или отличаться незначительно при тех расстояниях между датчиками, какие применяются при производстве работ.
Для нахождения такой пары датчиков вычисляются функции взаимной корреляции между сигналом, зарегистрированным датчиком, расположенным на конце одной из линий, и всеми сигналами с других датчиков этой линии. Затем выбираем сигнал со второго датчика, расположенного рядом с предыдущим, и так же вычисляем функции взаимной корреляции между этим сигналом и сигналами со всех других датчиков, кроме всех предыдущих.
Далее, анализируя функцию взаимной корреляции, определяем ее максимум и смещение его относительно нулевого сдвига. Величина смещения максимума функции взаимной корреляции соответствует разнице времен прихода волны к соответствующим датчикам. Анализируя все величины этих сдвигов, выбираем те пары датчиков, сдвиг между сигналами у которых нуль или близок к нулю. В том случае, когда сдвиг между записями сигнала разными датчиками равен нулю, это свидетельствует о том, что датчики равноудалены от источника колебаний.
Далее, используя координаты этих датчиков, определяем координаты середины отрезка, соединяющего эти датчики, и строим линию, проходящую через середину перпендикулярно к отрезку, соединяющему датчик известным способом (М.Я.Выгодский «Справочник по высшей математике». Госиздат технико-теоретической литературы, М., 1957, с.25, 41).
Аналогичным образом находим одну или несколько пар датчиков на второй линии таких, что время прихода сигналов к датчикам пары будет одинаковым. Затем также определяем середину отрезка, соединяющего пару датчиков, к которым сигнал от источника приходит за одинаковое время, и строим перпендикуляр к этому отрезку в его середине. Точка пересечения этого перпендикуляра с ранее рассчитанным перпендикуляром, является проекцией забоя скважины на поверхность земли. Координаты точки пересечения двух перпендикуляров определяются известным способом (М.Я.Выгодский «Справочник по высшей математике». Госиздат технико-теоретической литературы. М., 1957, с.25, 32, 41) как точка пересечения двух прямых.
В том случае, когда не удается найти пару датчиков, сигнал к которым от источника колебаний приходит за одинаковое время, поставленную задачу можно решать следующими путями:
1. Один из датчиков этой пары, время прихода сигнала к которым наименее отличаются, или другой датчик перемещают по поверхности до тех пор, пока времена прихода сигнала к обоим датчикам не сравняются. Далее выполняем вычисления, аналогичные выше описанным, т.е. строим перпендикуляр к середине отрезка, соединяющего точки, в которых размещены датчики.
2. Вначале определяем последовательность величин, характеризующих сдвиги во времени между сигналом, который регистрируется некоторым фиксированным датчиком, и сигналами, которые регистрируются всеми другими датчиками от одного источника колебаний, расположенного на забое скважины, т.е. каждому датчику соответствует свое значение последовательности. В качестве зафиксированного датчика может быть один из крайних датчиков. Из (И.И.Гурвич, Сейсморазведка, «Гостоптехиздат», М., 1960, стр.129-130) известно, что зависимость времени распространения сигнала от источника до датчиков, расположенных вдоль некоторой прямой линии, описывается гиперболой. Такой же функцией будет описываться и последовательность величин, характеризующих сдвиги во времени между сигналом от фиксированного датчика и сигналами от всех других датчиков. Используя известные координаты датчиков и сдвиги соответствующих им сигналов, аппроксимируем полученную последовательность сдвигов гиперболой. Далее рассчитываем координаты вершины этой гиперболы и проводим из нее перпендикуляр к прямой, проходящей через крайние датчики. И затем определяются координаты точки пересечения этого перпендикуляра с другими перпендикулярами, построенными такими же способами для датчиков другой линии.
Заявителю не известны технические решения, отличающие заявляемое решение от прототипа, поэтому можно сделать вывод о соответствии его критерию "Новизна" и "Изобретательский уровень".
Способ определения траектории скважины поясняет чертежом, где изображена схема наблюдений для реализации предлагаемого способа. С поверхности 1 земли бурится скважина 3, устье которой находится в точке 2, а забой скважины, где находится источник колебаний бурящейся скважины или датчик в случае пробуренной скважины, на момент измерения находится в точке 13. На поверхности 1 вдоль линий 4 и 5 размещены датчики 6, 7, 8, 9, 10, 11 при определении траектории бурящейся скважины. Регистрируемые датчиками сигналы по линии связи передаются на компьютер или другое регистрирующее устройство.
Реализация способа осуществляется следующим образом. В некоторый момент времени Т0 оператор включает запись колебаний в виде цифровых последовательностей в память компьютера одновременно от всех датчиков 6, 7, 8, 9, 10, 11 и т.д. Через некоторый интервал времени dT запись колебаний прекращается. Таким путем в память компьютера будут занесены цифровые последовательности, соответствующие сигналам от каждого датчика. Затем осуществляется поиск временного сдвига между одним из сигналов, который считают опорным, со всеми сигналами от других датчиков. Обычно для поиска сдвига одного сигнала относительно другого используется функция взаимной корреляции («Цифровая обработка сейсмических данных», Козлов Е.А., Гогоненков Г.Н. и др., «Недра», 1973). Если сдвиг между опорным сигналом и одним из исследуемых сигналов отсутствует, т.е. равен нулю, время прихода сигнала от источника до этих приемников считается одинаковым. Допустим на линии 4, вдоль которой расположены датчики 6, 7, 8 и т.д., к датчикам 6 и 7 сигнал приходит одновременно. Тогда, согласно предлагаемому изобретению в середине отрезка прямой между датчиками 6 и 7 проводим перпендикуляр 14. Аналогичным образом производится поиск датчиков, к которым сигнал приходит одновременно, на линии 5. Пусть это будут датчики 10 и 11. Тогда проводим перпендикуляр 15 к отрезку между датчиками 10 и 11 и проходящий через его середину между этими датчиками. Точка 12 пересечения перпендикуляров 14 и 15, координаты которой вычисляются известным способом (Выгодский М.Я. «Справочник по высшей математике», Госиздат технико-теоретической литературы, М., 1957, с.25, 32, 41), является проекцией забоя скважины 13 на поверхность 1.
Для определения координаты точки, являющейся проекцией забоя скважины на поверхность земли, можно использовать и датчики, расположенные на разных линиях 4 и 5. Поиск пары датчиков, время прихода сигналов к которым будет одинаковым, производится также. Т.е. из зарегистрированных записей сигналов выбирается одна, соответствующая некоторому датчику на одной из линий. Затем рассчитывается функция взаимной корреляции этой записи с записями, зарегистрированными датчиками, расположенными на другой линии. Так же выбираются датчики, сдвиг между записями которых равен нулю. Например, датчик 7 на линии 4 и датчик 10 на линии 5 одновременно регистрируют сигнал, приходящий от забоя бурящейся скважины. По координатам датчиков 7 и 10 рассчитываются координаты середины отрезка 16 известным способом между этими датчиками. Затем рассчитывается известным способам уравнение перпендикуляра 17 к отрезку 16, соединяющему найденную пару датчиков и проходящего через середину этого отрезка. Этот перпендикуляр 17 должен проходить через точку 12 пересечения ранее рассчитанных перпендикуляров.
Глубина, на которой расположен источник колебаний, т.е. забой скважины, определяется из прямоугольного треугольника. Этот треугольник образуется следующим образом. Одной из вершин треугольника является точка, горизонтальные координаты которой соответствуют точке 12, другая вершина имеет горизонтальные и вертикальную координаты забоя скважины, которые были рассчитаны на предыдущем этапе измерений. В случае, когда производится первое измерение, т.е. пока еще нет предыдущего этапа измерений, второй вершиной треугольника будет устье скважины 2. Длина гипотенузы этого треугольника равна интервалу бурильной трубы, на который она переместилась за время между двумя измерениями, если это измерение не первое, или от устья скважины до момента первого измерения. Таким образом, горизонтальные координаты забоя скважины совпадают с координатами точки 12, а вертикальная координата определяется из рассмотренного прямоугольного треугольника, у которого известен один катет (расстояние между точками 12 и 2) и гипотенуза по теореме Пифагора.
При измерениях в последующих точках все перечисленные процедуры повторяются.
Для определения траектории уже пробуренной скважины на поверхности в точках 6, 7, 8, 9, 10, 11 и т.д. размещают не датчики, а источники колебаний. Возбуждение колебаний производится последовательно в каждом пункте. Прием колебаний осуществляют раздельно от каждого источника зондом, размещаемым в исследуемой скважине. Зарегистрированные зондом сигналы записываются в память компьютера. После регистрации сигналов от всех источников при фиксированном положении зонда в скважине определяется временной сдвиг между сигналами на основе функции взаимной корреляции, как описано выше.
По результатам расчетов выбираются те датчики, сигнал от которых приходит в точку регистрации за одинаковое время. Затем, как описано выше, проводится прямая через середину отрезка, соединяющего эти датчики и перпендикулярно этому отрезку. Далее отыскиваются другие пары датчиков, сигнал от которых приходит в точку приема за одинаковое время, и повторяются описанные выше построения перпендикуляра из середины отрезка, соединяющего эту пару датчиков. Точка пересечения перпендикуляров является проекцией точки приема на поверхность. Глубина точки приема определяется так же, как описано выше для случая, когда в скважине размещается не приемник, а источник колебаний.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБРАЩЕННОГО ВЕРТИКАЛЬНОГО СЕЙСМИЧЕСКОГО ПРОФИЛИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2450292C2 |
| Способ скважинной сейсморазведки | 1983 |
|
SU1350637A2 |
| Способ вертикального сейсмического профилирования | 1982 |
|
SU1056111A1 |
| СПОСОБ ПОСТРОЕНИЯ СЕЙСМИЧЕСКОГО ГЛУБИННОГО РАЗРЕЗА | 2009 |
|
RU2415449C1 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ ДЛЯ ПРЯМОГО ПРОГНОЗА НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 1997 |
|
RU2117317C1 |
| Способ вертикального сейсмического профилирования | 1981 |
|
SU1002997A1 |
| Сейсмоакустический способ контроля бурения глубоких скважин | 1989 |
|
SU1752942A1 |
| СПОСОБ КОНТРОЛЯ РАЗРАБОТКИ ЗАЛЕЖЕЙ УГЛЕВОДОРОДОВ ПО МИКРОСЕЙСМИЧЕСКОЙ ЭМИССИИ | 2006 |
|
RU2309434C1 |
| Способ скважинной сейсморазведки | 1981 |
|
SU1035549A1 |
| Способ определения местоположениязАбОя СКВАжиНы | 1979 |
|
SU840777A1 |
Изобретение относится к области геофизических исследований скважин и может быть использовано при определении пространственных координат забоя скважины в процессе бурения, а так же ранее пробуренных наклонных и горизонтальных скважин. Техническим результатом изобретения является повышение точности определения траектории пробуренной скважины или пространственных координат забоя скважины в процессе бурения на основе того, что по исходным данным определяется не время прихода сигнала к каждому из датчиков, а временной сдвиг между зарегистрированными сигналами. Для определения траектории скважины сигнал от источника колебаний принимается на поверхности датчиками, расположенными как минимум на двух непараллельных прямых линиях. По зарегистрированным сигналам от бурового инструмента на основе функции взаимной корреляции осуществляют поиск временного сдвига сигнала между сигналом одного из датчиков на одной из прямых линий, который считают опорным, со всеми сигналами от других датчиков этой же линии. Определяют, по крайней мере, два датчика, время прихода волны упругих колебаний к которым одинаково, затем, используя координаты этих датчиков, определяют координаты середины отрезка прямой линии, соединяющего эти датчики, и строят перпендикуляр к этому отрезку в его середине. Аналогичным образом находят пары датчиков, к которым время прихода волны упругих колебаний одинаково, на второй прямой линии и строят к середине отрезка, их соединяющего, второй перпендикуляр, находят точку пересечения этого перпендикуляра с ранее построенным перпендикуляром, координаты которой являются проекцией забоя скважины на поверхность. При измерениях в последующих точках все перечисленные процедуры повторяют. 1 ил.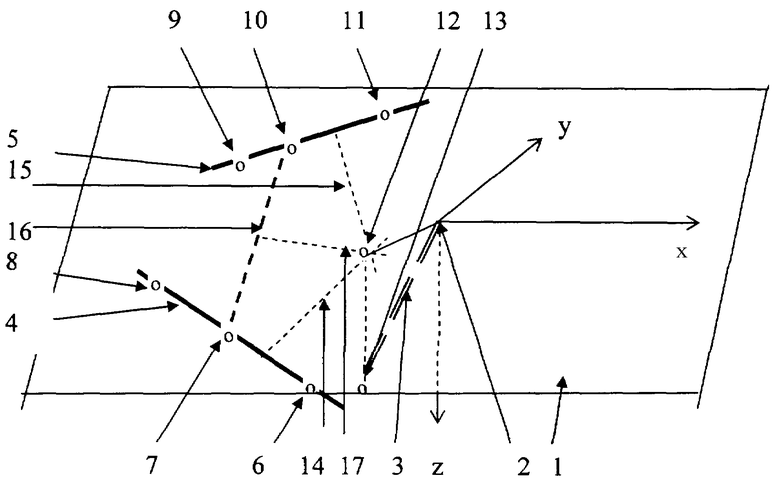
Способ определения траектории скважины, основанный на регистрации сигналов упругих колебаний от бурового инструмента расположенными на поверхности датчиками, отличающийся тем, что датчики на поверхности располагают как минимум на двух не параллельных прямых линиях, по зарегистрированным сигналам от бурового инструмента на основе функции взаимной корреляции осуществляют поиск временного сдвига сигнала между сигналом одного из датчиков на одной из прямых линий, который считают опорным, со всеми сигналами от других датчиков этой же линии, определяют, по крайней мере, два датчика, время прихода волны упругих колебаний к которым одинаково, затем, используя координаты этих датчиков, определяют координаты середины отрезка прямой линии, соединяющего эти датчики, и строят перпендикуляр к этому отрезку в его середине, аналогичным образом находят пары датчиков, к которым время прихода волны упругих колебаний одинаково, на второй прямой линии и строят к середине отрезка их соединяющего второй перпендикуляр, находят точку пересечения этого перпендикуляра с ранее построенным перпендикуляром, координаты которой являются проекцией забоя скважины на поверхность, при измерениях в последующих точках все перечисленные процедуры повторяют.
| БЕХТЕРЕВ И.С | |||
| и др | |||
| Метод решения навигационной задачи по сейсмическим данным ВСП ПБ | |||
| - Геофизика, № 5, 2000, с.16-20 | |||
| Способ определения скорости распространения сейсмических волн | 1977 |
|
SU643819A1 |
| Способ акустических исследований скважин в процессе бурения | 1975 |
|
SU744406A1 |
| Способ определения координат центра забоя ствола скважины | 1980 |
|
SU927986A1 |
| Способ определения местоположения забоя скважины | 1989 |
|
SU1698865A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСКРИВЛЕНИЯ БУРОВОЙ СКВАЖИНЫ | 1990 |
|
RU2021500C1 |
| СПОСОБ СКВАЖИННОЙ СЕЙСМОРАЗВЕДКИ | 1996 |
|
RU2101733C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЗАБОЯ СКВАЖИНЫ | 1996 |
|
RU2112878C1 |
| ШВЕЙНАЯ ИГЛА БОРОВСКОГО | 1999 |
|
RU2144584C1 |
| US 4003017 А, 11.01.1977 | |||
| US 5050130 А, 17.09.1991 | |||
| СПОСОБ ИЗГОТОВЛЕНИЯ БЛОКА ФЕРРИТОБЫХ МАГНИТНЫХ ГОЛОВОК | 1972 |
|
SU434456A1 |

