Область техники, к которой от носится изобретение
Настоящее изобретение относится к устройству контроля проскальзывания ремня, а в особенности, хотя и не исключительным образом, изобретение относится к устройству контроля проскальзывания ремня, выполненному с возможностью определения проскальзывания ремня, связанного с мотор-генератором, на основе рабочего состояния первого и второго подвижных элементов устройства контроля проскальзывания ремня.
Уровень техники
Мотор-генераторы могут быть использованы, чтобы выборочно помогать работе двигателя или вырабатывать электроэнергию для электрической системы двигателя и/или транспортного средства. Следовательно, мотор-генераторы могут быть использованы, как часть технологии параллельного гибридного привода. По мере того, как производители автомобилей стараются все сильнее внедрять гибридную технологию в свои изделия, может происходить замена генератора переменного тока двигателя на мотор-генератор, например, интегрированный стартер-генератор (ИСГ) в системе ременного привода вспомогательных агрегатов.
Благодаря замене генератора переменного тока на ИСГ, можно накапливать рекуперативную энергию торможения, при этом ИСГ может создавать вспомогательный крутящий момент в периоды высокой нагрузки. ИСГ может также обеспечивать более быстрый перезапуск двигателя в ситуациях чередования остановки-запуска. В то время как для системы стандартного генератора переменного тока требуется передача крутящего момента только в одном направлении, в случае ИСГ требуется передача крутящего момента в обоих направлениях, при этом, по сравнению со стандартной системой генератора переменного тока, требуется передавать крутящий момент повышенного уровня. Более высокие уровни передаваемого крутящего момента означают, что натяжение ремня должно быть установлено в расчете, например, на преодоление вброд водных преград, при котором трение на ремне будет снижено. Однако, если рассчитывать на такие ситуации, то это приведет к установке высокого натяжения ремня, и к повышенному расходу топлива.
Чтобы минимизировать потери на трение в системе ременного привода вспомогательных агрегатов, желательно всегда поддерживать как можно более низкое натяжение ремня. Можно использовать известные устройства регулирования натяжения, чтобы увеличивать натяжение ремня только, когда есть потребность в высоком крутящем моменте двигателя. Однако такие активно управляемые устройства натяжения являются менее надежными.
Задачей настоящего изобретения является решение указанных проблем.
Раскрытие изобретения
Согласно одному аспекту настоящего изобретения, предложено устройство контроля проскальзывания ремня, связанного с мотор-генератором, содержащее: первый подвижный элемент, выполненный с возможностью движения относительно мотор-генератора; второй подвижный элемент, связанный с первым подвижным элементом с возможностью движения, причем второй подвижный элемент связан с ремнем так, что рабочие состояния первого и второго подвижных элементов устройства контроля проскальзывания ремня зависят от натяжения ремня и первый датчик, выполненный с возможностью определения рабочего состояния, например, положения первого подвижного элемента. Устройство контроля проскальзывания ремня может содержать второй датчик, выполненный с возможностью определения рабочего состояния, например, положения второго подвижного элемента. Устройство контроля проскальзывания ремня может быть выполнено с возможностью определения факта проскальзывания ремня исходя рабочего состояния первого и второго подвижных элементов.
Устройство контроля проскальзывания ремня может быть выполнено с возможностью определения проскальзывания ремня, связанного с мотор-генератором, например, вызванного рабочим крутящим моментом мотор-генератора, и/или моментом любых других устройств, связанных с ремнем, таких как шкив коленчатого вала или шкив вспомогательного устройства. Устройство контроля проскальзывания ремня может содержать одно или более управляющих устройств, выполненных с возможностью регулирования рабочего крутящего момента мотор-генератора в ответ на рабочее состояние первого и/или второго подвижных элементов устройства контроля проскальзывания ремня, так чтобы проскальзывания ремня не происходило.
Второй подвижный элемент может быть связан с ремнем своим первым концом. Второй подвижный элемент может быть связан ремнем своим вторым концом. Первый и второй концы второго подвижного элемента могут быть связаны с ремнем с каждой стороны мотор-генератора.
Натяжение ремня может зависеть от рабочего крутящего момента мотор-генератора. Устройство контроля проскальзывания ремня может быть выполнено с возможностью создания на ремне предварительного натяжения.
Первый подвижный элемент может быть связан с фиксированной точкой, которая практически неподвижна относительно движения мотор-генератора. Первый и второй подвижные элементы могут быть выполнены с возможностью движения относительно ремня. Первый и второй подвижные элементы могут быть выполнены с возможностью вращения и/или скольжения. Первый и второй подвижные элементы могут быть связаны друг с другом с возможностью вращения и/или скольжения. Второй подвижный элемент может содержать один или более шкивов для контакта с ремнем. Первый и/или второй подвижные элементы могут быть связаны с двигателем транспортного средства.
Первый и второй датчики могут представлять собой датчики угла поворота, выполненные с возможностью определения углового положения первого и/или второго подвижных элементов. Первый и второй датчики могут представлять собой тензометрические датчики, выполненные с возможностью определения механического напряжения в первом и/или втором подвижных элементах. По меньшей мере один элемент первого датчика может быть выполнен с возможностью крепления к первому подвижному элементу. По меньшей мере один элемент первого датчика может быть выполнен с возможностью крепления к двигателю, транспортному средству или любой другой опорной конструкции. По меньшей мере один элемент второго датчика может быть выполнен с возможностью крепления ко второму подвижному элементу. По меньшей мере один элемент второго датчика может быть выполнен с возможностью крепления к первому подвижному элементу.
Мотор-генератор может представлять собой интегрированный стартер-генератор. Ремень может представлять собой ремень привода вспомогательных агрегатов, например, поликлиновой ремень.
В соответствии с настоящим изобретением, двигатель может быть оснащен одним или более устройствами контроля проскальзывания ремня.
Транспортное средство, такое как автомобиль, может быть оснащено одним или более устройствами контроля проскальзывания ремня и/или двигателем в соответствии с настоящим изобретением.
Двигатель и/или транспортное средство могут содержать одно или более управляющих устройств, выполненных с возможностью регулирования рабочего крутящего момента мотор-генератора.
Согласно другому аспекту настоящего изобретения, предложен способ контроля проскальзывания ремня, связанного с мотор-генератором, путем использования устройства контроля проскальзывания ремня, содержащий: определение рабочего состояния первого подвижного элемента устройства контроля проскальзывания ремня при помощи первого датчика, причем первый подвижный элемент выполнен с возможностью движения относительно мотор-генератора; определение рабочего состояния второго подвижного элемента устройства контроля проскальзывания ремня при помощи второго датчика, причем второй подвижный элемент связан с первым подвижным элементом с возможностью движения, а также второй подвижный элемент связан с ремнем так, что рабочие состояния первого и второго подвижных элементов устройства контроля проскальзывания ремня зависят от натяжения ремня; и определение факта проскальзывания ремня исходя из рабочего состояния первого и второго подвижных элементов.
Натяжение ремня может зависеть от рабочего крутящего момента мотор-генератора. Способ может содержать определение факта проскальзывания ремня, связанного с мотор-генератором, например, вызванного рабочим крутящим моментом мотор-генератора.
Способ может содержать регулирование рабочего крутящего момента мотор-генератора в ответ на рабочее состояние первого и/или второго подвижных элементов устройства контроля проскальзывания ремня, так чтобы проскальзывания ремня не происходило.
Способ может содержать подтверждение факта проскальзывания ремня путем сравнения выходных сигналов первого и второго датчиков.
Способ может содержать контроль проскальзывания ремня и принятие контрмер для уменьшения крутящего момента, который требуется передавать через ремень, если обнаруживается проскальзывание. Например, момент, передаваемый через ремень, можно уменьшить путем регулирования крутящего момента, создаваемого мотор-генератором, двигателем и/или одним или более вспомогательными устройствами. Уменьшение потребного момента, передаваемого через ремень, может приводить к уменьшению натяжения ремня. Проскальзывание ремня можно контролировать посредством пассивного натяжного устройства. Контрмеры могут, например, включать в себя: запрет ситуаций чередования запуска-выключения; использование мотор-генератора и/или стартерного мотора двигателя для помощи при запуске двигателя; запрет функций ИСГ, связанных с передачей через ремень высоких значений момента; и/или обеспечение подходящей индикации для водителя, когда есть проблемы с ремнем. Таким образом, натяжение ремня может быть минимизировано в интервале условий работы ИСГ.
Согласно изобретению, также предложено программное обеспечение, такое как компьютерная программа или компьютерный программный продукт для осуществления любого из описываемых здесь способов, и машиночитаемая среда, в которой хранится программа для осуществления любого из описываемых здесь способов. Компьютерная программа, реализующая настоящее изобретение, может храниться в машиночитаемой среде или она могла бы существовать, например, в форме сигнала, такого как сигнал загружаемых данных, поступающий с интернет-сайта, или могла бы существовать в любой другой форме.
Краткое описание чертежей
В целях лучшего понимания настоящего изобретения, и более наглядной иллюстрации возможностей его осуществления изобретение будет рассмотрено на примере со ссылками на прилагаемые чертежи, из которых:
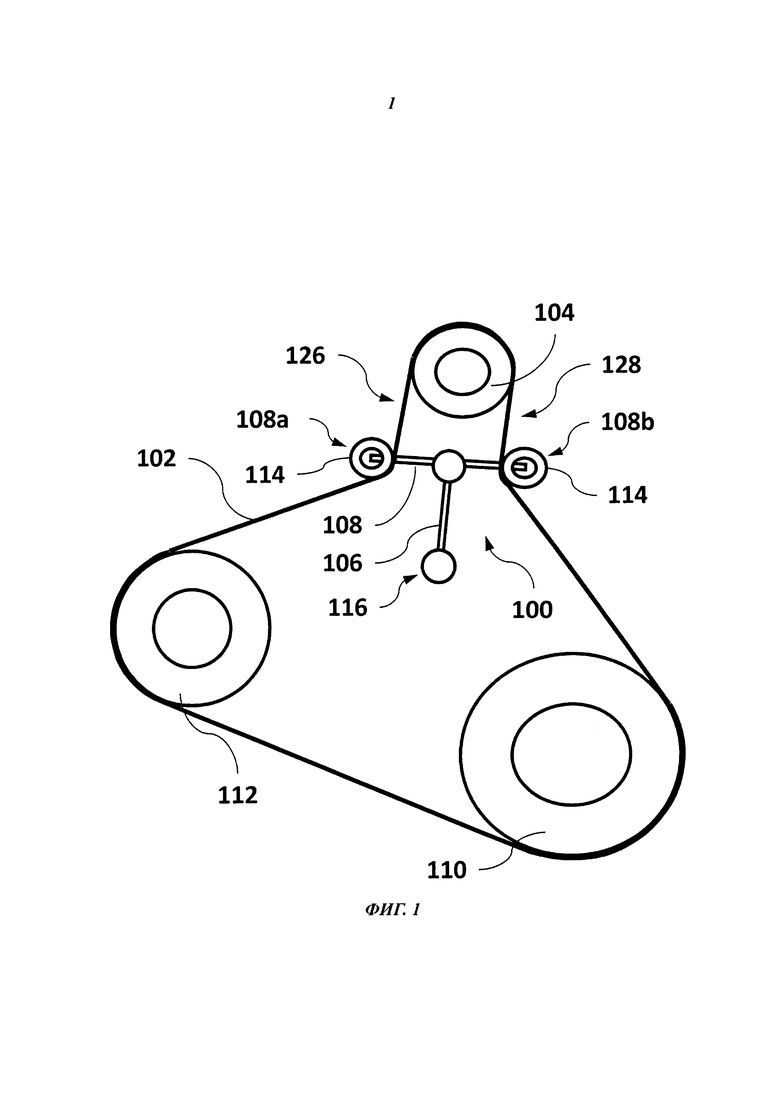
фиг. 1 изображает устройство контроля проскальзывания ремня, связанного со шкивом мотор-генератора, шкивом коленчатого вала и шкивом вспомогательного устройства,
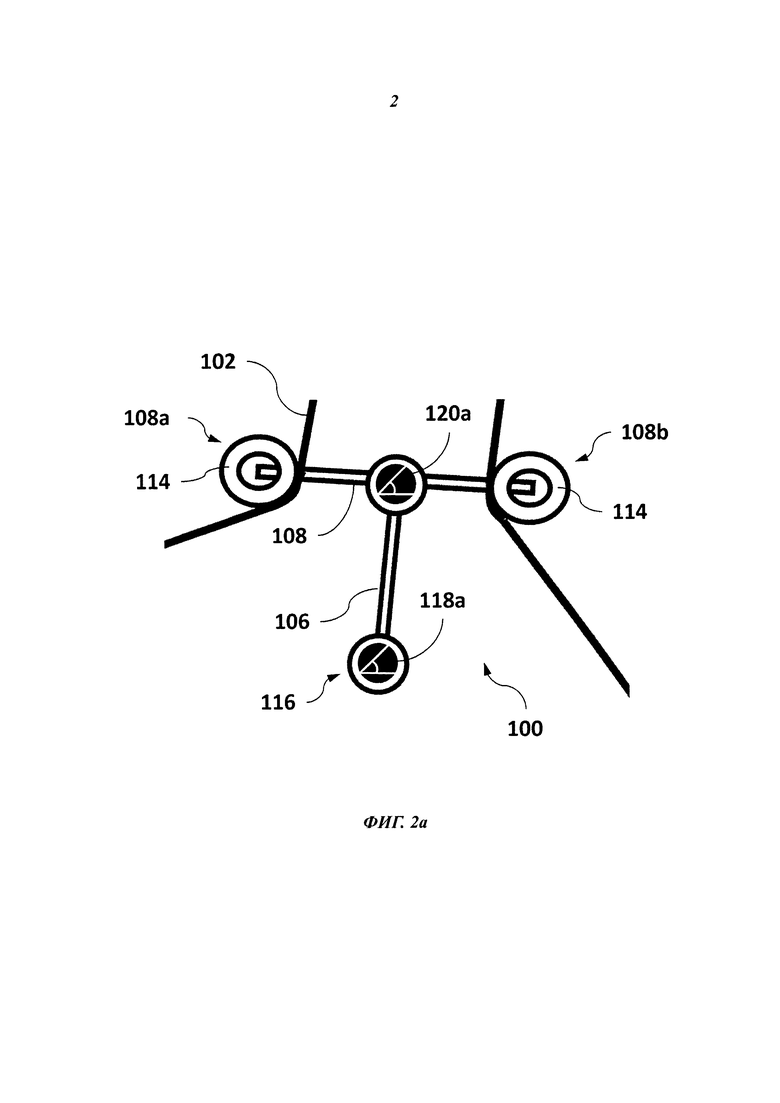
фиг. 2a изображает устройство контроля проскальзывания ремня, содержащее первый и второй датчики угла поворота,
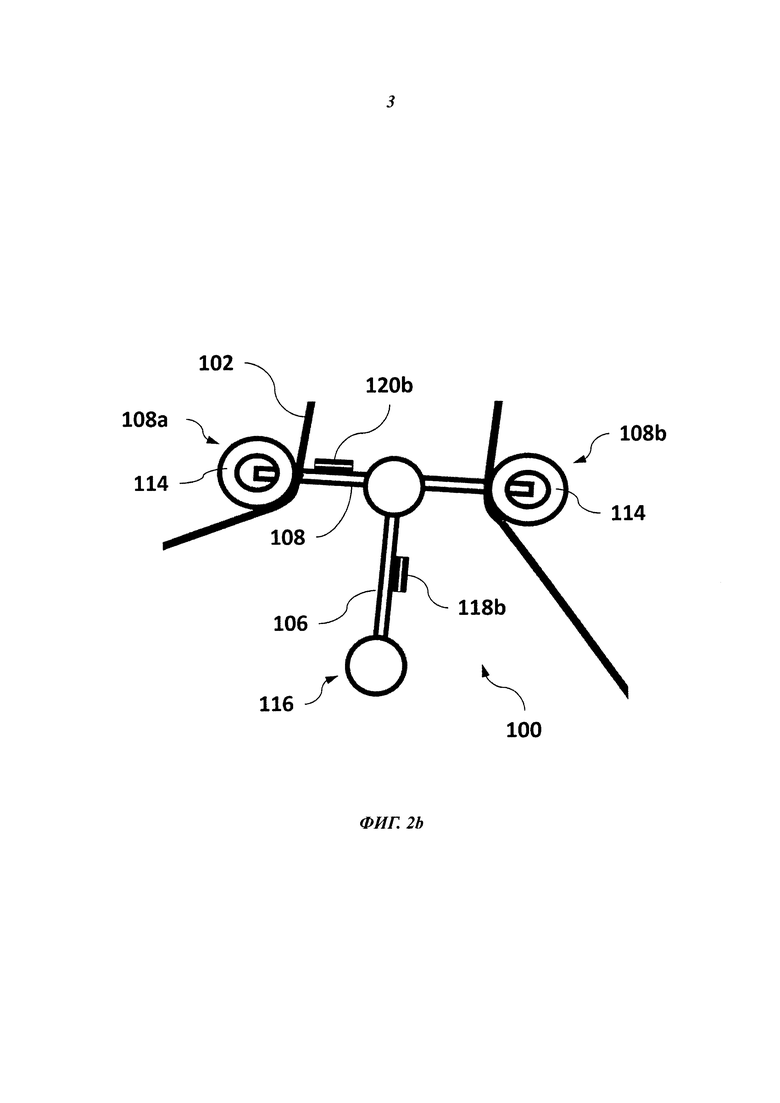
фиг. 2b изображает устройство контроля проскальзывания ремня, содержащее первый и второй тензометрические датчики,
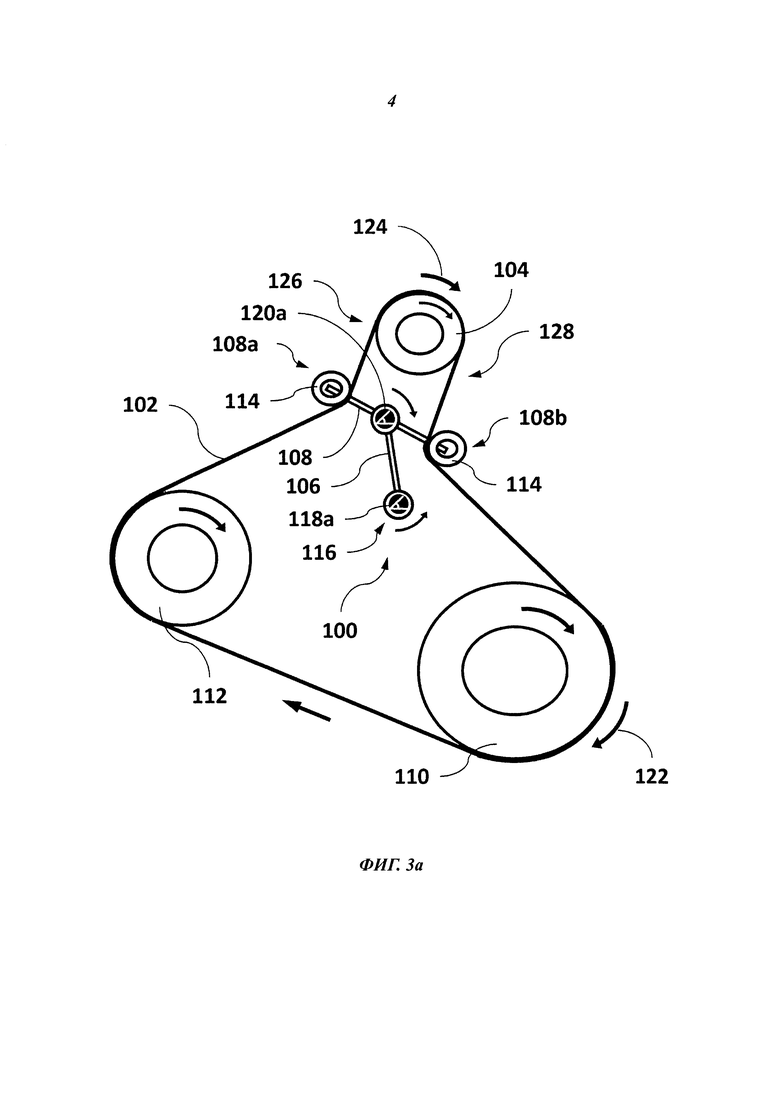
фиг. 3a изображает пример режима работы устройства контроля проскальзывания ремня, при котором мотор-генератор работает в качестве мотора и проскальзывание ремня отсутствует,
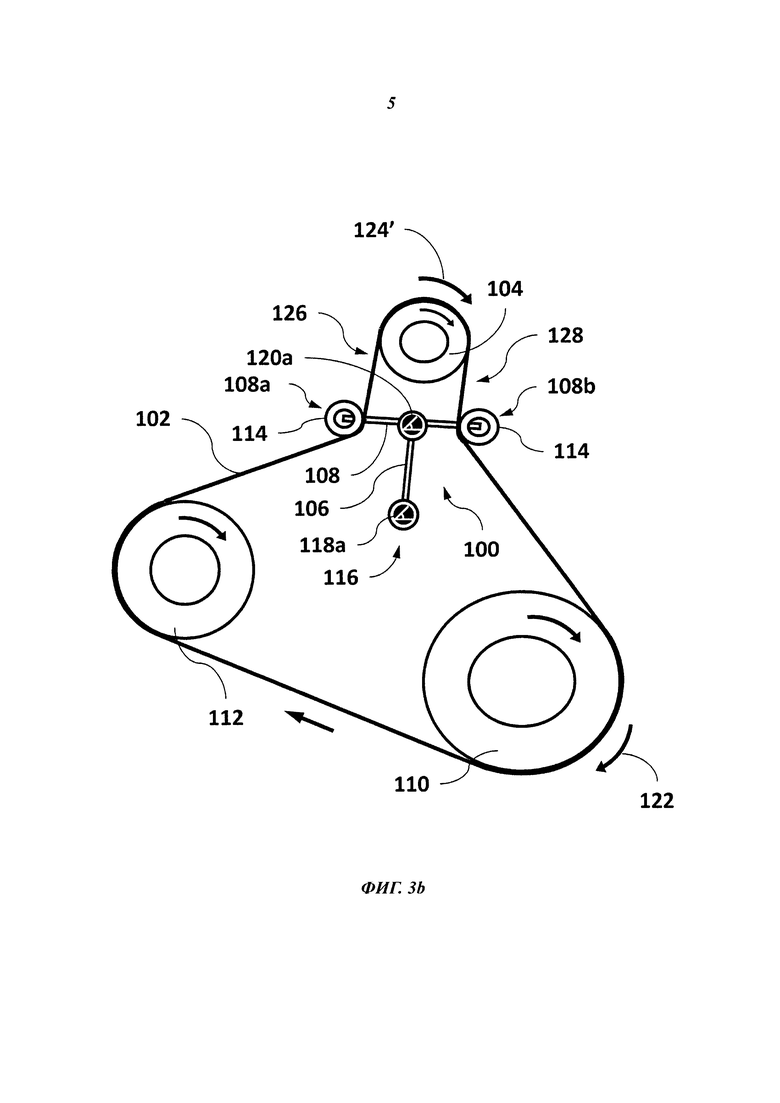
фиг. 3b изображает пример режима работы устройства контроля проскальзывания ремня, при котором мотор-генератор работает в качестве мотора и имеет место проскальзывание ремня,
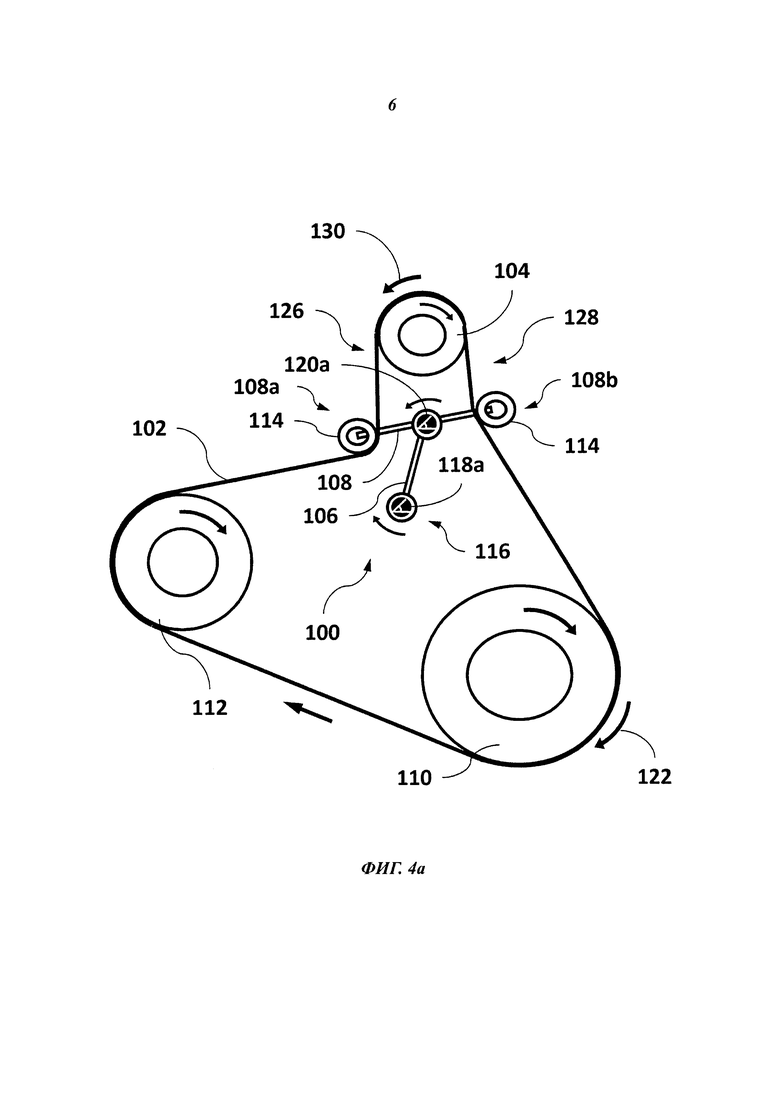
фиг. 4a изображает пример режима работы устройства контроля проскальзывания ремня, при котором мотор-генератор работает в качестве генератора и проскальзывание ремня отсутствует, и
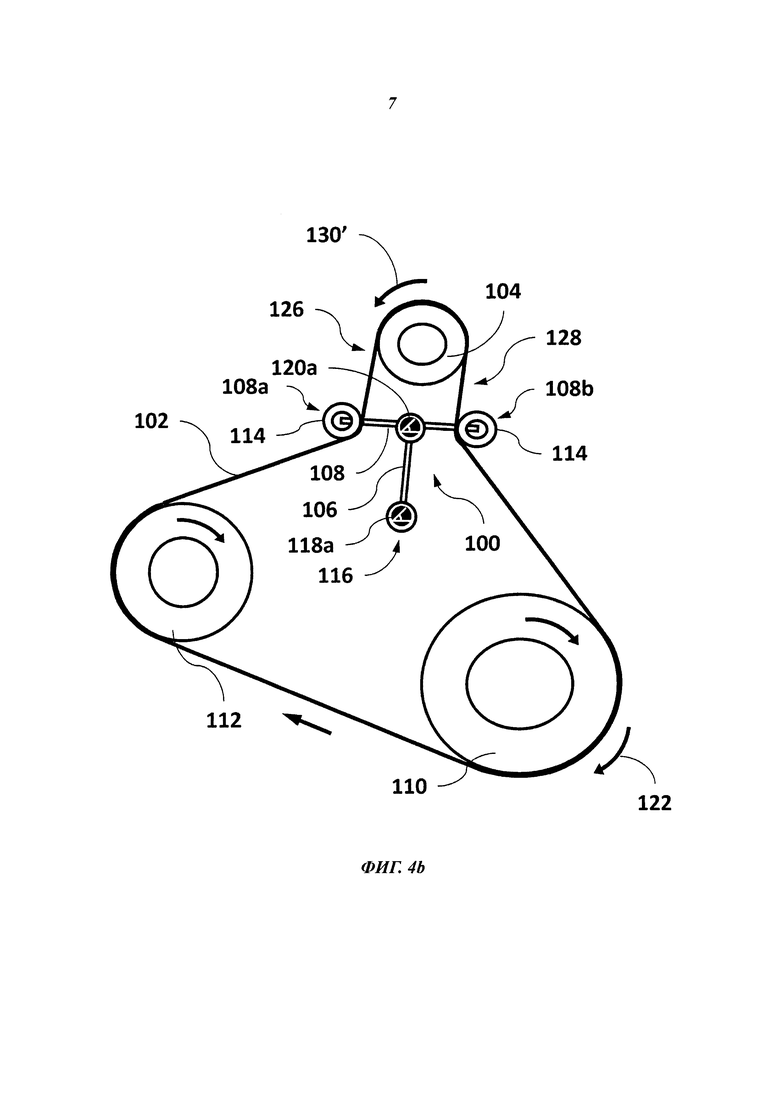
фиг.4b изображает пример режима работы устройства контроля проскальзывания ремня, при котором мотор-генератор работает в качестве генератора и имеет место проскальзывание ремня.
Осуществление изобретения
На фиг. 1 изображено устройство 100 контроля проскальзывания ремня для ремня 102, связанного со шкивом 104 мотор-генератора, например, шкивом интегрированного стартер-генератора двигателя. Устройство 100 контроля проскальзывания ремня содержит первый подвижный элемент 106, который может перемещаться относительно мотор-генератора 104, и второй подвижный элемент 108, который связан с первым подвижным элементом 106 с возможностью перемещения. Второй подвижный элемент 108 связан с ремнем 102 так, что рабочие состояния первого и второго подвижных элементов 106, 108 устройства 100 контроля проскальзывания ремня зависят от натяжения ремня 102.
В примере на фиг. 1 ремень 102 является ремнем привода вспомогательных агрегатов, например, поликлиновым ремнем, который связан со шкивом 104 мотор-генератора, шкивом 110 коленчатого вала и шкивом 112 вспомогательного устройства, например, шкивом насоса или шкивом компрессора. Хотя это и не показано, но с ремнем 102 могут быть связаны дополнительные вспомогательные устройства и шкивы. Второй подвижный элемент 108 устройства 100 контроля проскальзывания ремня связан с ремнем 102 первым концом 108a на первой стороне 126 шкива 104 мотор-генератора и вторым концом 108b на второй стороне 128 шкива 104 мотор-генератора. Второй подвижный элемент 108 связан с ремнем 102 посредством шкивов 114, выполненных с возможностью контакта с ремнем 102 в областях первого и второго конца 108a, 108b второго подвижного элемента 108. Согласно другому примеру, первый и второй концы 108a, 108b второго подвижного элемента 108 могут быть связаны с ремнем с каждой стороны шкива 110 коленчатого вала, шкива 112 вспомогательного устройства или любого другого подходящего шкива, для которого требуется контролировать проскальзывание ремня.
В примере на фиг. 1 первый подвижный элемент 106 связан с фиксированной точкой 116, которая является неподвижной относительно шкива 104 мотор-генератора. Фиксированная точка 116 может представлять собой часть двигателя и/или часть автомобиля. Первый подвижный элемент 106 связан с фиксированной точкой 116 с возможностью вращения. Второй подвижный элемент 108 связан с первым подвижным элементом 106 с возможностью вращения. Первый и второй подвижные элементы 106, 108, таким образом, выполнены с возможностью движения относительно ремня 102. Однако, согласно другому примеру, первый и второй подвижные элементы 106, 108 могут быть выполнены с возможностью вращения и/или скольжения относительно ремня 102, и связанными друг с другом с возможностью вращения и/или скольжения. Первый и/или второй подвижные элементы 106, 108 могут по существу быть удлинены. Первый подвижный элемент 106 может быть оснащен первым соединителем на первом конце для поворотного соединения первого подвижного элемента 106 с фиксированной точкой 116. Первый подвижный элемент 106 может быть оснащен вторым соединителем на втором конце для поворотного соединения первого подвижного элемента 106 со вторым подвижным элементом 108. Второй подвижный элемент 108 может быть оснащен третьим соединителем между первым и вторым концами второго подвижного элемента 108. Третий соединитель может быть предусмотрен приблизительно посередине между первым и вторым концами второго подвижного элемента 108. Третий соединитель может находиться в контакте со вторым соединителем первого подвижного элемента 106, чтобы дать возможность взаимного вращения первого и второго подвижных элементов 106, 108.
В поворотных соединителях между фиксированной точкой 116 и первым подвижным элементом 106 и/или между первым подвижным элементом 106 и вторым подвижным элементом 108 могут быть предусмотрены или могут не быть предусмотрены средства сопротивления. Например, в случае, если в поворотных соединителях предусмотрены средства сопротивления, то указанные соединители могут быть оснащены упругим элементом, таким как спиральная пружина, и/или любым другим упругим элементом. Такое сопротивление вращению первого и/или второго подвижных элементов 106, 108 может действовать при любом направлении поворота, и может служить для возврата первого и/или второго подвижных элементов 106, 108 в исходное положение, например, показанное на фиг. 1.
Устройство 100 контроля проскальзывания ремня может быть выполнено с возможностью создания в ремне 102 предварительного натяжения, например, за счет длины первого и/или второго подвижных элементов 106, 108, так чтобы при выключенном состоянии двигателя натяжение ремня 102 состояло исключительно из статического предварительного натяжения. В такой ситуации натяжение ремня 102 на первой стороне 126 шкива 104 мотор-генератора практически равно натяжению ремня 102 на второй стороне 128 шкива 104 мотор-генератора, при этом первый и второй подвижные элементы 106, 108 находятся в первом рабочем состоянии, изображенном на фиг. 1. Согласно другому примеру, устройство 100 контроля проскальзывания ремня может быть смещено за счет одного или более смещающих элементов, например, пружин, так чтобы предварительное натяжение, создаваемое в ремне 102 посредством устройства 100 контроля проскальзывания, зависело от конфигурации смещающих элементов.
В примерах, которые будут приведены ниже, рабочие состояния первого и второго подвижных элементов 106, 108 связаны с угловым положением указанных элементов и/или механическим напряжением в указанных элементах. Однако следует понимать, что рабочие состояния первого и второго подвижных элементов 106, 108 могут быть связаны с любым изменением положения первого и второго подвижных элементов 106, 108, например, изменениями положения при вращательном или поступательном изменениях перемещения, или, в самом деле, любым параметром первого и второго подвижных элементов 106, 108, на которые может влиять натяжение ремня 102.
Устройство 100 контроля проскальзывания ремня содержит первый датчик, выполненный с возможностью определения рабочего состояния первого подвижного элемента 106, и второй датчик, выполненный с возможностью определения рабочего состояния второго подвижного элемента 108. Таким образом, устройство 100 контроля проскальзывания ремня выполнено с возможностью определения факта проскальзывания ремня 102 исходя из рабочих состояний первого и второго подвижных элементов 106, 108.
В примере, изображенном на фиг. 2a, первый и второй датчики представляют собой первый и второй датчики 118a, 120a угла поворота, выполненные с возможностью определения углового положения соответственно первого и второго подвижных элементов 106, 108. Первый датчик 118a угла поворота выполнен с возможностью определения углового положения первого подвижного элемента 106 относительно фиксированной точки 116, а второй датчик 120a угла поворота выполнен с возможностью определения углового положения второго подвижного элемента 108 относительно первого подвижного элемента 106.
В примере, изображенном на фиг. 2b, первый и второй датчики представляют собой первый и второй тензометрические датчики 118b, 120b, выполненные с возможностью определения механического напряжения соответственно в первом и втором подвижных элементах 106, 108. Однако следует понимать, что в альтернативном примере устройство 100 контроля проскальзывания ремня может содержать любое число датчиков угла и/или тензометрических датчиков, выполненных с возможностью определения рабочих состояний первого и второго подвижных элементов 106, 108. Таким образом, устройство 100 контроля проскальзывания ремня может быть выполнено с возможностью определения факта проскальзывания ремня 102 исходя из угловых положений и/или механических напряжений первого и второго подвижных элементов 106, 108.
В примерах, изображенных на фиг. 2a и 2b, первый и второй датчики присоединены соответственно к первому и второму подвижным элементам 106, 108. Однако следует понимать, что первый и второй датчики могут быть присоединены к любой части устройства 100 контроля проскальзывания ремня, части двигателя и/или части транспортного средства, так чтобы первый и второй датчики были способны определять рабочие состояния первого и второго подвижных элементов 106, 108. Например, датчики 118a, 120a угла поворота могут содержать один элемент на соответствующем подвижном элементе, а другой элемент в неподвижной позиции относительно фиксированной точки 116 или первого подвижного элемента 106. Соответствующие подвижные элементы датчиков угла поворота могут вместе определять угловое положение первого и второго подвижных элементов 106, 108.
Устройство 100 контроля проскальзывания ремня может быть выполнено с возможностью определения проскальзывания ремня 102, связанного со шкивом 104 мотор-генератора, например, вследствие приложения рабочего крутящего момента мотор-генератора. Например, когда мотор-генератор работает в качестве мотора, например, стартерного мотора двигателя, то он осуществляет привод ремня 102. Когда мотор-генератор работает в качестве мотора, помогая двигателю осуществлять привод автомобиля, он передает ремню 102 ведущий крутящий момент в том же направлении, в каком шкив 110 коленчатого вала передает ремню 102 свой крутящий момент. В другом примере, когда мотор осуществляет запуск двигателя, мотор-генератор передает ремню 102 ведущий крутящий момент в направлении, противоположном резистивному крутящему моменту, создаваемому шкивом 110 коленчатого вала. При таких обстоятельствах ремень 102 будет проскальзывать, если рабочий крутящий момент мотор-генератора, т.е. ведущий крутящий момент, создаваемый мотор-генератором, имеет значительную величину. И напротив, когда мотор-генератор работает в качестве генератора, например, генератора переменного тока двигателя, мотор-генератор приводится в движение посредством ремня 102. Когда мотор-генератор работает в качестве генератора, он передает ремню 102 резистивный крутящий момент в направлении, противоположном тому, в каком шкив 110 коленчатого вала передает ремню 102 свой крутящий момент. При таких обстоятельствах ремень 102 будет проскальзывать, если рабочий крутящий момент мотор-генератора, т.е. резистивный крутящий момент, какой мотор-генератор передает ремню 102, будет иметь значительную величину. Ремень 102 может также проскальзывать, если момент (резистивный или иной), передаваемый шкивом 110 коленчатого вала, имеет значительную величину.
Когда ремень 102 проскальзывает, его натяжение существенно снижается. Соответственно, ремень может возвращаться практически в то положение, какое показано на фиг. 1. Возврат ремня в данное положение, что может быть признаком возникновения проскальзывания ремня, может быть по сути обнаружен первым и вторым подвижными элементами 106, 108.
Устройство контроля проскальзывания ремня может содержать одно или более управляющих устройств, выполненных с возможностью регулирования рабочего крутящего момента мотор-генератора в ответ на рабочее состояние первого и/или второго подвижных элементов 106, 108, так чтобы проскальзывания ремня 102 не происходило. Например, когда мотор-генератор работает в качестве мотора, управляющее устройство может быть выполнено с возможностью уменьшения ведущего крутящего момента мотор-генератора, если ведущий крутящий момент, создаваемый мотор-генератором для привода ремня 102, достаточно большой, чтобы вызывать проскальзывание ремня 102. В другом примере, когда мотор-генератор работает в качестве генератора, управляющее устройство может быть выполнено с возможностью уменьшения резистивного крутящего момента мотор-генератора, если резистивный крутящий момент, передаваемый мотор-генератором ремню 102, достаточно большой, чтобы вызывать проскальзывание ремня 102.
Согласно другому аспекту настоящего изобретения, предлагается способ контроля проскальзывания ремня 102, связанного с мотор-генератором, путем использования устройства 100 контроля проскальзывания ремня. Способ содержит определение рабочего состояния первого подвижного элемента 106 устройства 100 контроля проскальзывания ремня при помощи первого датчика, причем первый подвижный элемент 106 выполнен с возможностью движения относительно мотор-генератора. Способ также содержит определение рабочего состояния второго подвижного элемента 108 устройства 100 контроля проскальзывания ремня при помощи второго датчика, причем второй подвижный элемент 108 связан с первым подвижным элементом 106 с возможностью движения. Второй подвижный элемент 108 связан с ремнем 102 так, что рабочие состояния первого и второго подвижных элементов 106, 108 устройства 100 контроля проскальзывания ремня зависят от натяжения ремня 102. Способ также содержит определение факта проскальзывания ремня 102 исходя из рабочего состояния первого и второго подвижных элементов 106, 108.
Натяжение ремня 102 может зависеть от рабочего крутящего момента мотор-генератора. Таким образом, способ может дополнительно содержать определение того, является ли проскальзывание ремня 102, связанного с мотор-генератором, следствием рабочего крутящего момента мотор-генератора.
Способ может дополнительно содержать регулирование рабочего крутящего момента мотор-генератора в ответ на рабочее состояние первого и/или второго подвижных элементов 106, 108 устройства 100 контроля проскальзывания ремня, так чтобы ремень 102 не проскальзывал. Например, способ может содержать подачу одного или более управляющих сигналов в управляющее устройство с целью регулирования рабочего крутящего момента мотор-генератора.
Согласно следующему примеру, способ может содержать подтверждение факта проскальзывания ремня 102 путем сравнения выходных сигналов первого и второго датчиков. Например, натяжение ремня может изменяться по величине, например, в силу изменений рабочего крутящего момента двигателя и/или в силу вибрации двигателя при его нормальной работе. Такие флуктуации могут приводить к ложному определению проскальзывания ремня. Однако, вероятность такого ложного определения можно уменьшить, если контролировать выходные сигналы обоих датчиков - первого и второго. Первый и второй подвижные элементы 106, 108 движутся в разных направлениях и, поэтому, могут реагировать на флуктуации различных частот и/или амплитуд. Следовательно, за счет подтверждения сигналов от первого и второго подвижных элементов 106, 108 вероятность ложного определения проскальзывания снижается. Кроме того, в ситуации, когда датчик неисправен, сравнение выходных сигналов двух датчиков можно использовать для проверки факта проскальзывания ремня 102. Способ может содержать сравнение выходных сигналов первого и второго датчиков с заранее заданным набором значений, чтобы убедиться, что выходные сигналы первого и второго датчиков действительно указывают на проскальзывание ремня 102. Кроме того, установка более одного датчика обеспечивает резерв на случай отказа одного из датчиков.
Помимо этого, выходные сигналы от первого и/или второго датчиков могут быть проверены на соответствие рабочему состоянию мотор-генератора, например, если мотор-генератор выключен, или не генерируя энергию, или не получая крутящий момент, поскольку такое состояние может также привести к ложному определению проскальзывания.
Первый пример режима работы для устройства контроля проскальзывания ремня На фиг. 3a и 3b изображен пример режима работы устройства 100 контроля проскальзывания ремня, при котором мотор-генератор работает в качестве мотора. Фиг. 3a изображает, что ремень 102 приводится в движение шкивом 110 коленчатого вала, так что вращаются все шкивы - шкив 110 коленчатого вала, шкив 112 вспомогательного устройства и шкив 104 мотор-генератора. Вдобавок к крутящему моменту (показанному стрелкой 122), который передает на ремень 102 шкив 110 коленчатого вала, мотор-генератор выполнен с возможностью передачи на ремень вторичного крутящего момента (показанного стрелкой 124), чтобы помочь приведению в движение ремня 102, например, когда велика потребность в крутящем моменте одного или более вспомогательных устройств, связанных с ремнем 102 и/или, когда высока нагрузка на двигатель. В результате того, что на ремень 102 передается вторичный крутящий момент 124, натяжение ремня 102 на первой стороне 126 шкива 104 мотор-генератора больше, чем натяжение ремня 102 на второй стороне 128 шкива 104 мотор-генератора. Вследствие разницы натяжений ремня 102 на первой и второй сторонах 126, 128 шкива 104 мотор-генератора первый подвижный элемент 106 поворачивается вокруг фиксированной точки 116, а второй подвижный элемент 108 поворачивается относительно первого подвижного элемента, например, в направлении, противоположном направлению вращения первого подвижного элемента 106. Таким образом, когда шкив 104 мотор-генератора передает на ремень 102 вторичный крутящий момент 124, первый и второй подвижные элементы 106, 108 устройства 100 контроля проскальзывания ремня находятся во вторых рабочих состояниях.
Аналогично на фиг. 3a, фиг. 3b изображено, что ремень 102 приводится в движение шкивом 110 коленчатого вала. Однако, на фиг. 3b мотор-генератор создает увеличенный вторичный крутящий момент (обозначенный стрелкой 124'). Этого увеличенного вторичного крутящего момента 124' достаточно, чтобы вызвать проскальзывание ремня 102 по шкиву 104 мотор-генератора, в результате чего не происходит передачи крутящего момента от шкива 104 мотор-генератора на ремень 102. Вследствие проскальзывания ремня 102 натяжение ремня 102 на первой стороне 126 шкива 104 мотор-генератора по существу равно натяжению ремня 102 на второй стороне 128 шкива 104 мотор-генератора, при этом первый и второй подвижные элементы 106, 108 находятся в первых рабочих состояниях. Таким образом, рабочие состояния первого и второго подвижных элементов 106, 108 устройства 100 контроля проскальзывания ремня зависят от рабочего крутящего момента мотор-генератора и, следовательно, от натяжения ремня 102, связанного со шкивом 104 мотор-генератора.
Поэтому в примере, приведенном на фиг 3a и 3b, первый и второй датчики способны определять изменения между первым и вторым рабочими состояниями первого и второго подвижных элементов 106, 108 вследствие увеличения ведущего крутящего момента 124, 124', создаваемого мотор-генератором.
Второй пример режима работы для устройства контроля проскальзывания ремня На фиг. 4a и 4b изображен пример режима работы устройства 100 контроля проскальзывания ремня, при котором мотор-генератор работает в качестве генератора. Фиг. 4а изображает, что ремень 102 приводится в движение шкивом 110 коленчатого вала, так что вращаются все шкивы - шкив 110 коленчатого вала, шкив 112 вспомогательного устройства и шкив 104 мотор-генератора. В примере, изображенном на фиг.4а, мотор-генератор, работая в качестве генератора, способен передавать резистивный крутящий момент (показанный стрелкой 130) ремню 102. В результате резистивного крутящего момента 130, передаваемого ремню 102 натяжение ремня 102 на первой стороне 126 шкива 104 мотор-генератора меньше, чем натяжение ремня 102 на второй стороне 128 шкива 104 мотор-генератора. Вследствие разницы натяжений ремня 102 на первой и второй сторонах 126, 128 шкива 104 мотор-генератора первый подвижный элемент 106 поворачивается вокруг фиксированной точки 116, а второй подвижный элемент 108 поворачивается относительно первого подвижного элемента, например, в направлении, противоположном направлению вращения первого подвижного элемента 106. Таким образом, когда шкив 104 мотор-генератора передает на ремень 102 резистивный крутящий момент, первый и второй подвижные элементы 106, 108 устройства 100 контроля проскальзывания ремня находятся в третьих рабочих состояниях.
Аналогично на фиг. 4a, фиг. 4b изображено, что ремень 102 приводится в движение шкивом 110 коленчатого вала. Однако, на фиг. 4b мотор-генератор создает увеличенный резистивный крутящий момент (обозначенный стрелкой 130'). Этого увеличенного резистивного крутящего момента 130' достаточно, чтобы вызвать остановку мотор-генератора и проскальзывание ремня 102 по шкиву 104 мотор-генератора. Вследствие проскальзывания ремня 102, натяжение ремня 102 на первой стороне 126 шкива 104 мотор-генератора по существу равно натяжению ремня 102 на второй стороне 128 шкива 104 мотор-генератора, при этом первый и второй подвижные элементы 106, 108 находятся в первых рабочих состояниях. Таким образом, рабочие состояния первого и второго подвижных элементов 106, 108 устройства 100 контроля проскальзывания ремня зависят от рабочего крутящего момента мотор-генератора, и, следовательно, от натяжения ремня 102, связанного со шкивом 104 мотор-генератора.
Поэтому в примере, приведенном на фиг 4a и 4b, первый и второй датчики выполнены с возможностью определения изменения между первым и вторым рабочими состояниями первого и второго подвижных элементов 106, 108 вследствие увеличения резистивного крутящего момента 130, 130', создаваемого мотор-генератором.
В примерах, изображенных на фиг. 3a-4b, изменение рабочих состояний первого и второго подвижных элементов 106, 108 определяется посредством первого и второго датчиков 118a, 120a угла поворота (как показано на фиг. 2a). Однако, согласно другому примеру, изменение рабочих состояний первого и второго подвижных элементов 106, 108 можно определять при помощи тензометрических датчиков 118b, 120b (как показано на фиг. 2b), или же на самом деле при помощи любого подходящего датчика, например, бесконтактного датчика приближения, способного определять рабочие состояния первого и второго подвижных элементов 106, 108. Поэтому следует понимать, что устройство 100 контроля проскальзывания ремня согласно настоящему изобретению не требует высокой чувствительности угловой скорости вращающихся компонентов, таких как шкивы или шестерни, чтобы определять проскальзывание ремня.
В примерах, изображенных на фиг. 3a-4b, первый и второй датчики выполнены с возможностью определения факта перехода от второго и/или третьего рабочих состояний первого и второго подвижных элементов 106, 108 к первому рабочему состоянию указанных первого и второго подвижных элементов 106, 108 вследствие достаточно большого увеличения рабочего крутящего момента мотор-генератора. Другими словами, первый и второй датчики выполнены с возможностью определения изменения между одним рабочим состоянием, при котором ремень 102 не проскальзывает, и другим рабочим состоянием, при котором ремень 102 проскальзывает. Однако следует понимать, что первый и второй датчики могут быть выполнены с возможностью определения степени изменения второго и/или третьего рабочих состояний первого и второго подвижных элементов 106, 108, вызванного постепенным увеличением рабочего крутящего момента мотор-генератора.
Согласно одному примеру, натяжение ремня 102, а, следовательно, величина перемещения первого и второго подвижных элементов 106, 108 могут зависеть от рабочего крутящего момента мотор-генератора. В сущности, второе и/или третье рабочие состояния первого и второго подвижных элементов 106, 108 могут включать некоторый интервал положений. Согласно другому примеру, степень механического напряжения в первом и втором подвижных элементах 106, 108 может зависеть от рабочего крутящего момента мотор-генератора. В сущности второе и/или третье рабочие состояния первого и второго подвижных элементов 106, 108 могут включать некоторый интервал значений механического напряжения.
Хотя в вышеприведенных примерах рассматривалось влияние рабочего крутящего момента мотор-генератора на возникновение проскальзывания ремня, равным образом на возникновение проскальзывания ремня 102 могут влиять рабочие крутящие моменты, создаваемые другими компонентами, связанными с ремнем 102, например, коленчатым валом двигателя и/или одним или более вспомогательными устройствами. Первый и второй подвижные элементы 106, 108 и их соответствующие датчики также могут определять факт проскальзывания ремня, вызванного рабочим крутящим моментом этих других компонентов.
Специалистам в данной области должно быть понятно, что, хотя изобретение было описано посредством примера его осуществления и со ссылками на один или более примеров, оно не ограничивается раскрытыми примерами, и что могут быть предложены другие примеры осуществления изобретения в границах его объема, которые установлены прилагаемой формулой изобретения.
Группа изобретений относится к машиностроению. Устройство контроля проскальзывания ремня для ремня, связанного с мотор-генератором, содержит первый подвижный элемент, выполненный с возможностью движения относительно мотор-генератора, второй подвижный элемент, связанный с первым подвижным элементом с возможностью движения, причем второй подвижный элемент связан с ремнем так, что рабочие состояния первого и второго подвижных элементов устройства контроля проскальзывания ремня зависят от натяжения ремня, первый датчик, выполненный с возможностью определения рабочего состояния первого подвижного элемента, и второй датчик, выполненный с возможностью определения рабочего состояния второго подвижного элемента. Устройство контроля проскальзывания ремня выполнено с возможностью определения факта проскальзывания ремня исходя рабочего состояния первого и второго подвижных элементов. Также заявлен двигатель, содержащий устройство, транспортное средство содержащее устройство и/или двигатель, способ контроля проскальзывания ремня и машиночитаемая среда с записанной на нее программой, исполнение которой на вычислительном устройстве осуществляет способ контроля проскальзывания ремня. Обеспечивается повышение надежности работы устройства. 5 н. и 21 з.п. ф-лы, 7 ил.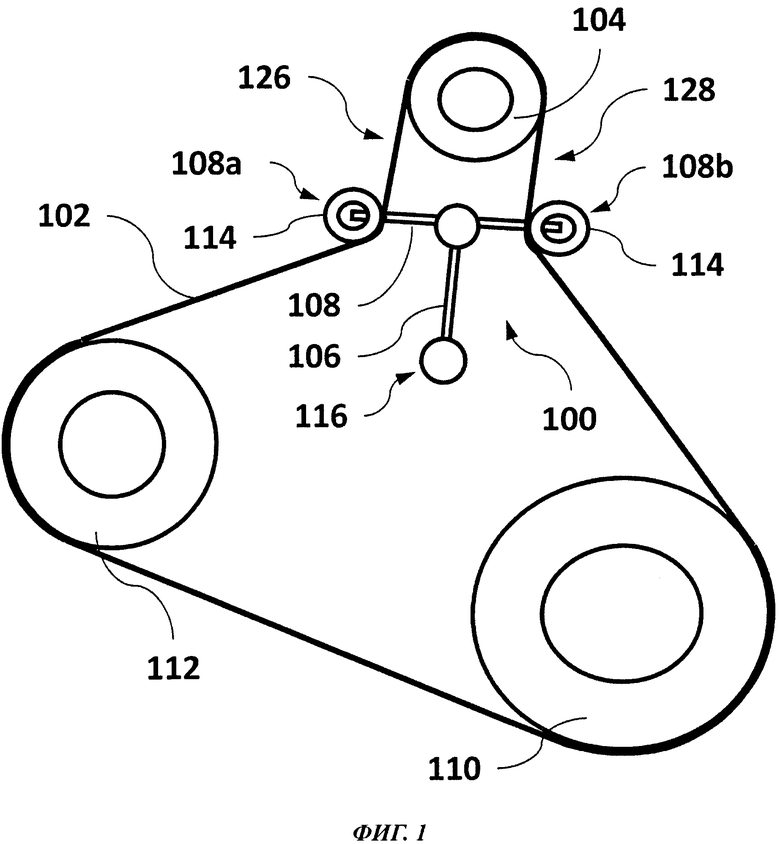
1. Устройство контроля проскальзывания ремня, связанного с мотор-генератором, содержащее:
первый подвижный элемент, выполненный с возможностью движения относительно мотор-генератора,
второй подвижный элемент, связанный с первым подвижным элементом с возможностью движения, причем второй подвижный элемент связан с ремнем так, что рабочие состояния первого и второго подвижных элементов устройства контроля проскальзывания ремня зависят от натяжения ремня,
первый датчик, выполненный с возможностью определения рабочего состояния первого подвижного элемента, и
второй датчик, выполненный с возможностью определения рабочего состояния второго подвижного элемента,
при этом устройство контроля проскальзывания ремня выполнено с возможностью определения факта проскальзывания ремня исходя из рабочего состояния первого и второго подвижных элементов.
2. Устройство контроля проскальзывания ремня по п. 1, отличающееся тем, что выполнено с возможностью определения проскальзывания ремня, связанного с мотор-генератором.
3. Устройство контроля проскальзывания ремня по п. 2, отличающееся тем, что дополнительно содержит одно или более управляющих устройств, выполненных с возможностью регулирования рабочего крутящего момента мотор-генератора в ответ на рабочее состояние первого и/или второго подвижных элементов устройства контроля проскальзывания ремня, так чтобы проскальзывания ремня не происходило.
4. Устройство контроля проскальзывания ремня по любому из предшествующих пунктов, отличающееся тем, что второй подвижный элемент связан с ремнем своим первым концом, и также второй подвижный элемент связан с ремнем своим вторым концом.
5. Устройство контроля проскальзывания ремня по п. 4, отличающееся тем, что первый и второй концы второго подвижного элемента связаны с ремнем с каждой стороны мотор-генератора.
6. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что натяжение ремня зависит от рабочего крутящего момента мотор-генератора.
7. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что по меньшей мере один элемент первого датчика выполнен с возможностью крепления к первому подвижному элементу, и по меньшей мере один элемент второго датчика выполнен с возможностью крепления ко второму подвижному элементу.
8. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что первый подвижный элемент связан с фиксированной точкой, которая неподвижна относительно движения мотор-генератора.
9. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что первый и второй подвижные элементы выполнены с возможностью движения относительно ремня.
10. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что первый и второй подвижные элементы выполнены с возможностью вращения и/или скольжения.
11. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что первый и второй подвижные элементы связаны друг с другом с возможностью вращения и/или скольжения.
12. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что второй подвижный элемент содержит один или более шкивов для контакта с ремнем.
13. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что выполнено с возможностью создания на ремне предварительного натяжения.
14. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что первый и второй датчики представляют собой датчики угла поворота, выполненные с возможностью определения углового положения первого и/или второго подвижных элементов.
15. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что первый и второй датчики представляют собой тензометрические датчики, выполненные с возможностью определения механического напряжения в первом и/или втором подвижных элементах.
16. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что мотор-генератор представляет собой интегрированный стартер-генератор.
17. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что первый и/или второй подвижные элементы связаны с двигателем транспортного средства.
18. Устройство контроля проскальзывания ремня по любому из пп. 1-3 или 5, отличающееся тем, что ремень представляет собой ремень привода вспомогательных агрегатов.
19. Двигатель, содержащий одно или более устройств контроля проскальзывания ремня, охарактеризованных в пп. 1-18.
20. Двигатель по п. 19, отличающийся тем, что дополнительно содержит одно или более управляющих устройств, выполненных с возможностью регулирования рабочего крутящего момента мотор-генератора.
21. Транспортное средство, содержащее одно или более устройств контроля проскальзывания ремня, охарактеризованных в пп. 1-18, и/или двигатель, охарактеризованный в п. 19 или 20.
22. Способ контроля проскальзывания ремня, связанного с мотор-генератором, путем использования устройства контроля проскальзывания ремня, содержащий: определение рабочего состояния первого подвижного элемента устройства контроля проскальзывания ремня при помощи первого датчика, причем первый подвижный элемент выполнен с возможностью движения относительно мотор-генератора,
определение рабочего состояния второго подвижного элемента устройства контроля проскальзывания ремня при помощи второго датчика, причем второй подвижный элемент связан с первым подвижным элементом с возможностью движения, а также второй подвижный элемент связан с ремнем так, что рабочие состояния первого и второго подвижных элементов устройства контроля проскальзывания ремня зависят от натяжения ремня, и
определение факта проскальзывания ремня исходя из рабочего состояния первого и второго подвижных элементов.
23. Способ контроля проскальзывания ремня по п. 22, отличающийся тем, что натяжение ремня зависит от рабочего крутящего момента мотор-генератора, способ также содержит определение факта проскальзывания ремня, связанного с мотор-генератором.
24. Способ контроля проскальзывания ремня по п. 23, отличающийся тем, что дополнительно содержит регулирование рабочего крутящего момента мотор-генератора в ответ на рабочее состояние первого и/или второго подвижных элементов устройства контроля проскальзывания ремня, так чтобы проскальзывания ремня не происходило.
25. Способ контроля проскальзывания ремня по любому из пп. 22-24, отличающийся тем, что дополнительно содержит подтверждение факта проскальзывания ремня путем сравнения выходных сигналов первого и второго датчиков.
26. Машиночитаемая среда с записанной на нее программой, исполнение которой на вычислительном устройстве осуществляет способ, охарактеризованный в любом из пп. 22-25.
| WO 2013033822 A1, 14.03.2013 | |||
| RU 99118848 A, 10.07.2001 | |||
| JP 2013180681 A, 12.09.2013 | |||
| НАТЯЖНОЕ УСТРОЙСТВО | 2003 |
|
RU2295075C2 |

