ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[1] Настоящее изобретение в общем относится к системам управления для множества насосов, в частности, множества погружных роторных центробежных насосов с регулируемой скоростью. Такое множество насосов может быть использовано на насосной станции для сети водоснабжения.
ПРЕДШЕСТВУЮЩИЙ УРОВЕНЬ ТЕХНИКИ
[2] Обычно насосная станция сети водоснабжения может содержать множество одинаковых или разных насосов, установленных параллельно друг другу для обеспечения требуемого расхода q и напора Δp (разности давлений) текучей среды. В зависимости от требуемого расхода и напора существует множество вариантов управления многонасосной системой, содержащей N насосов, с помощью системы управления, где N≥2. Многонасосная система может иметь 2N-1 разных вариантов работы системы с разными подмножествами насосов. Однако в зависимости от требуемого расхода и напора общее энергопотребление разных подмножеств отличается. Таким образом, для работы многонасосной системы с минимальным энергопотреблением система управления множеством насосов может выбирать работу системы с подмножеством насосов, имеющим минимальное энергопотребление. Например, если требуется половина полной нагрузки системы из четырех одинаковых насосов, система управления имеет один вариант работы всех четырех насосов примерно с половиной нагрузки, или шесть вариантов работы двух насосов примерно с полной нагрузкой, или четыре варианта работы трех насосов примерно с 2/3 нагрузки. В зависимости от характеристик насоса один из этих вариантов может представлять подмножество с минимальным энергопотреблением.
[3] Например, документ US 7,480,544 B2 описывает систему параллельно соединенных энергосберегающих машин для подачи текучей среды постоянного давления для питания трубопроводной системы с известными узлами и трубопроводными участками.
[4] Документ US 2003/0235492 A1 относится к способу и устройству для автоматического управления множеством насосов, работающих либо параллельно, либо последовательно.
[5] Документ US 2015/0148972 A1 описывает устройство и способ обеспечения работы множества центробежных насосов с определенным числом насосов с минимальным энергопотреблением.
[6] Все известные системы или способы управления требуют хранения информации о характеристиках насоса, предоставляемой производителем насоса. Однако из-за технологических допусков, износа и/или обрастания реальные характеристики насоса могут отличаться от сохраненной информации в логике управления. Характеристики насоса могут меняться с течением времени и могут отличаться для разных насосов. Таким образом, система управления может считать насосы одинаковыми, хотя фактически их текущие характеристики существенно отличаются. Такая недостоверная информация приводит к неправильным решениям в отношении того, какое подмножество насосов является наиболее энергоэффективным для обеспечения требуемого расхода и напора.
[7] В случае установки системы управления на существующую многонасосную систему доступная информация о насосах может вообще отсутствовать или быть недостаточной. Многонасосная система может содержать насосы разных размеров или видов, причем предполагается, что многонасосная система содержит подмножество из по меньшей мере двух насосов, обеспечивающих одинаковый расход при одинаковой скорости. Следует также отметить, что измерение расхода с помощью датчиков в общем не желательно, поскольку установка и обслуживание датчиков расхода является дорогостоящей операцией. Таким образом, обычно доступно только одно измерение расхода системы, или измеренное текущее значение расхода вовсе отсутствует. Кроме того, неизвестна характеристика насоса и/или энергопотребление при нулевом расходе.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[8] В отличие от известных систем управления множеством насосов варианты осуществления настоящего изобретения обеспечивают систему и способ управления для определения характеристики насоса и/или энергопотребления при нулевом расходе в условиях отсутствия информации о характеристиках насоса, обеспеченной производителем насоса.
[9] В соответствии с первым аспектом настоящего изобретения обеспечена система управления множеством насосов, содержащая модуль управления, модуль обработки, интерфейс связи и модуль хранения, в которой модуль управления выполнен с возможностью:
a) запуска конфигурационного цикла нулевого расхода путем увеличения скорости по меньшей мере одного насоса в дополнение к подмножеству j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос начал оказывать влияние на общий расход, причем модуль обработки выполнен с возможностью определения аппроксимированной характеристики  насоса и/или энергопотребления
насоса и/или энергопотребления  , где ω0 - скорость по меньшей мере одного ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход; и/или
, где ω0 - скорость по меньшей мере одного ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход; и/или
b) запуска конфигурационного цикла нулевого расхода путем уменьшения скорости по меньшей мере одного насоса подмножества j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос прекратил оказывать влияние на общий расход, причем модуль обработки выполнен с возможностью определения аппроксимированной характеристики насоса и/или энергопотребления , где ω0 - скорость по меньшей мере одного замедляющегося насоса в момент, когда он прекращает оказывать влияние на общий расход.
[10] Дополнительно во время ускорения/замедления по меньшей мере одного насоса давление поддерживается по существу постоянным. В варианте a), т.е. при ускорении по меньшей мере одного насоса в дополнение к уже работающему подмножеству j, подмножество j может обеспечивать по существу постоянное давление, и ускоряющийся насос не оказывает влияния на расход до тех пор, пока не будет достигнута скорость ω0, которая как раз достаточна для обеспечения постоянного давления. Аналогично в варианте b), т.е. при замедлении по меньшей мере одного насоса из работающего подмножества j, подмножество j может обеспечивать по существу постоянное давление, и замедляющийся насос продолжает оказывать влияние на расход до тех пор, пока его скорость не опустится ниже скорости ω0, которая является минимально необходимой для обеспечения постоянного давления. В обоих случаях это вызывает резкое изменение сигнала, которое может проявляться в виде резкого скачка или падения на графике, на котором регистрируется скорость, давление или энергопотребление во время изменения скорости.
[11] Дополнительно модуль обработки может быть выполнен с возможностью определения изменения принимаемого сигнала с использованием алгоритма обнаружения изменений, например, алгоритма кумулятивных сумм (CUSUM). Дополнительно модуль обработки может быть выполнен с возможностью определения изменения принимаемого сигнала путем определения, является ли абсолютное значение градиента напора Δp, скорости ωj и/или энергопотребления P равным или превышающим заданное пороговое значение.
[12] Таким образом, параметры c и z в выражениях Δp=cωi2 и/или P=zωi3, а также скорость ω0 могут быть определены путем запуска одного или более конфигурационных циклов нулевого расхода.
[13] Однако ускорение или замедление насоса в многонасосной системе всегда означает определенное возмущение в работе сети для подачи текучей среды. Некоторые сети для подачи текучей среды чувствительны к изменениям расхода или давления, имеющим высокой градиент, например, контуры охлаждения. Кроме того, изменения расхода или давления с высоким градиентом, как правило, более энергозатратны, чем плавные изменения. Таким образом, во время нормальной работы многонасосной системы желательно минимизировать возмущения, обусловленные ускорением или замедлением насосов.
[14] В связи с этим модуль управления может быть дополнительно выполнен с возможностью:
a) увеличения скорости k насосов в дополнение к подмножеству j из i насосов многонасосной системы, содержащей N насосов и работающей со скоростью ωj, обеспечивая общий напор Δp, где N≥2, 1≤k<N и 1≤i<N, причем модуль управления выполнен с возможностью замедления i насосов подмножества j со скорости ωj до меньшей скорости ωm, где скорость ωm - скорость, необходимая для обеспечения подмножеством m из i+k насосов общего напора Δp; и/или
b) уменьшения скорости k насосов подмножества j из i насосов многонасосной системы, содержащей N насосов и работающей со скоростью ωj, обеспечивая общий напор Δp, где N≥2, 1≤k<i и 1<i≤N, причем модуль управления выполнен с возможностью ускорения i-k насосов остаточного подмножества r со скорости ωj до большей скорости ωr, где скорость ωr - скорость, необходимая для обеспечения остаточным подмножеством r из i-k насосов общего напора Δp.
[15] Дополнительно модуль управления может быть выполнен с возможностью поддержания общего напора Δp постоянным при ускорении/замедлении. Дополнительно модуль управления может быть выполнен с возможностью выполнения ускорения/замедления в соответствии с по меньшей мере одной заданной модельной кривой. Параметры a, b, c, x, y и z в полиномах  и
и  , где параметры указывают аппроксимированную характеристику Δp=f(q,ωj) насоса и/или энергопотребление P=f(q,ωj), могут быть определены во время конфигурационного цикла (циклов), как описано ниже, и использованы для определения заданной модельной кривой. Скорость ω0, определенная во время конфигурационного цикла нулевого расхода, может быть использована для координации ускорения (i дополнительных насосов или остаточного подмножества r) и одновременного замедления (работающего подмножества j или k останавливающихся насосов) таким образом, чтобы объединенный поток и давление всех работающих насосов во время ускорения/замедления были по существу постоянными. Таким образом, нет необходимости ответных действий при резком изменении расхода и/или давления после ускорения/замедления, так как знание заданной модельной кривой прежде всего позволяет предотвратить такое резкое изменение и установить требуемую скорость, расход и давление при завершении ускорения/замедления.
, где параметры указывают аппроксимированную характеристику Δp=f(q,ωj) насоса и/или энергопотребление P=f(q,ωj), могут быть определены во время конфигурационного цикла (циклов), как описано ниже, и использованы для определения заданной модельной кривой. Скорость ω0, определенная во время конфигурационного цикла нулевого расхода, может быть использована для координации ускорения (i дополнительных насосов или остаточного подмножества r) и одновременного замедления (работающего подмножества j или k останавливающихся насосов) таким образом, чтобы объединенный поток и давление всех работающих насосов во время ускорения/замедления были по существу постоянными. Таким образом, нет необходимости ответных действий при резком изменении расхода и/или давления после ускорения/замедления, так как знание заданной модельной кривой прежде всего позволяет предотвратить такое резкое изменение и установить требуемую скорость, расход и давление при завершении ускорения/замедления.
[16] Дополнительно модуль управления может быть выполнен с возможностью запуска n разных подмножеств из i насосов многонасосной системы, содержащей N насосов, во время n разных конфигурационных циклов со скоростью ωj, где N≥2, 2≤n≤2N-1 и 1≤i≤N, причем каждый конфигурационный цикл j Є {1,…,n} связан с подмножеством j Є {1,…,n} и скоростью ωj. Интерфейс связи выполнен с возможностью приема сигналов, указывающих рабочие параметры, от каждого подмножества j во время связанного конфигурационного цикла j. Модуль обработки выполнен с возможностью определения аппроксимированной характеристики Δp=f(q,ωj) насоса на основе принимаемых сигналов для каждого подмножества j и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q. Модуль хранения выполнен с возможностью хранения аппроксимированной характеристики Δp=f(q,ωj) или указывающих ее параметров.
[17] Следует отметить, что символ j используется в настоящем документе как индекс, чтобы отличать разные подмножества и конфигурационные циклы друг от друга. Число насосов в подмножестве j принято за i. Число конфигурационных циклов принято за n. Поскольку подмножество j меняется для разных конфигурационных циклов, один и тот же индекс j может быть использован для определения подмножества и конфигурационного цикла. Следующая далее таблица может иллюстрировать это на примере системы из трех насосов одного типа и размера. Состояние всех насосов может быть проиллюстрировано двоичным числом с N битами, где каждый бит представляет насос, т.е. 0 означает «выключено», 1 означает «включено», и двоичный вес представляет число i насосов в текущем подмножестве j:
0 - «выключено», 1 - «включено»
Число n конфигурационных циклов зависит от того, насколько точно должна быть аппроксимирована характеристика Δp=f(q,ωj) насоса. В примере приведенной выше таблицы имеется три варианта запуска первого (j=1) конфигурационного цикла с одним (i=1) работающим насосом. Также имеется три варианта запуска второго (j=2) конфигурационного цикла с двумя (i=2) работающими насосами. Предпочтительно число i работающих насосов может отличаться для разных конфигурационных циклов. В частности, если можно предположить, что все насосы имеют одинаковую, но неизвестную характеристику насоса, в качестве аппроксимации может быть использован следующий полином второго порядка:
 ,
,
где a, b и c - параметры, указывающие характеристику насоса. Контрольный расход q может представлять собой измеренное или нормализованное значение, т.е. он может быть произвольно задан как q=1. Скорость ωj представляет собой рабочий параметр, принимаемый интерфейсом связи от каждого подмножества j во время связанного конфигурационного цикла j. Напор Δpj может измеряться датчиком давления и приниматься интерфейсом связи в качестве рабочего параметра во время связанного конфигурационного цикла j. Альтернативно или в дополнение скорость ωj может быть установлена для достижения определенного напора Δpj и для поддержания напора Δpj=Δp постоянным для всех n конфигурационных циклов. Таким образом, конфигурационные циклы позволяют аппроксимировать текущую характеристику насоса для определения, какое подмножество насосов является наиболее энергоэффективным с точки зрения обеспечения требуемого расхода q и напора Δp.
[18] Дополнительно модуль обработки может быть выполнен с возможностью определения аппроксимированного энергопотребления P=f(q,ωj) насоса на основе принимаемых сигналов для каждого подмножества j и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q, причем модуль хранения может быть выполнен с возможностью хранения аппроксимированного энергопотребления P=f(q,ωj) или указывающих его параметров. Аналогично характеристике Δp=f(q,ωj) насоса, в частности, если можно предположить, что все насосы подмножества имеют одинаковое, но неизвестное энергопотребление, в качестве аппроксимации может быть использован следующий полином второго порядка:
 ,
,
где x, y и z - параметры, указывающие энергопотребление. Таким образом, аппроксимированное энергопотребление может быть использовано в качестве альтернативы или в дополнение к аппроксимированной характеристике насоса для определения, какое подмножество насосов является наиболее энергоэффективным с точки зрения обеспечения требуемого расхода или напора.
[19] Таким образом, дополнительно модуль обработки может быть выполнен с возможностью определения подмножества k с минимальным энергопотреблением для требуемой нагрузки на основе аппроксимированного энергопотребления P=f(q,ωj) и/или аппроксимированной характеристики Δp=f(q,ωj) насоса, сохраненных в модуле хранения. Следовательно, модуль управления может быть выполнен с возможностью обеспечения работы многонасосной системы с определенным подмножеством k, имеющим минимальное энергопотребление для требуемой нагрузки.
[20] Дополнительно модуль управления может быть выполнен с возможностью запуска i насосов подмножества j с одинаковой скоростью ωj во время конфигурационного цикла j, причем скорость ωj i насосов подмножества j в конфигурационном цикле j отличается от скорости ωk s насосов подмножества k в другом конфигурационном цикле k, где j≠s, причем общий напор Δp, создаваемый многонасосной системой, является по существу одинаковым для обоих конфигурационных циклов j, k. Другими словами, скорости ωj и ωk могут быть заданы для достижения определенного постоянного напора Δpj=Δpk=Δp для всех n конфигурационных циклов.
[21] Дополнительно модуль обработки может быть выполнен с возможностью определения аппроксимированной характеристики Δp=f(q,ωj) насоса и/или энергопотребления P=f(q,ωj) методом наименьших квадратов, если число n конфигурационных циклов равно или превышает число определяемых параметров. Таким образом, если множество параметров является переопределенным, могут быть определены «усредненные» параметры с помощью полиномиального регрессионного анализа или подобного статистического метода для использования избыточной информации из конфигурационных циклов. Таким образом, износ, обрастание, другие формы снижения эффективности или различия между насосами из-за технологических допусков могут быть сглажены и, следовательно, приняты во внимание. Кроме того, во время избыточных конфигурационных циклов могут быть определены выбросы, чтобы отбросить их при усреднении, и/или определить и запретить работу низкоэффективных насосов многонасосной системы. Такие определенные низкоэффективные насосы могут быть отмечены как нуждающиеся в обслуживании, ремонте или замене.
[22] Аппроксимация полиномом второго порядка наиболее эффективна в отношении рабочих точек максимальной эффективности, поскольку ожидается, что характеристика Δp=f(q,ωj) насоса и энергопотребление P=f(q,ωj) будут довольно гладкими вокруг этих предпочтительных рабочих точек. Однако аппроксимация может быть менее точной для рабочих точек, удаленных от точки максимальной эффективности, в частности, для работы при нулевом расходе. Однако точная аппроксимация работы при нулевом расходе полезна по нескольким причинам. Во-первых, аппроксимации характеристики Δp=f(q,ωj) насоса и/или энергопотребления P=f(q,ωj) являются более надежными и более точными, если известны точки Δp=f(0,ω)≈cω02 и/или P=f(0,ω)≈zω03. Во-вторых, как будет описано ниже, может быть определена скорость ω0, при которой насос, запущенный в дополнение к работающему подмножеству, оказывает влияние на общий расход. В-третьих, знание параметров c и z полезно для многонасосной системы из двух одинаковых насосов, т.е. N=2, так как имеется только два варианта работы подмножеств с разным числом насосов i, т.е. j=1 (01 или 10) при i=1 и j=2 (11) при i=2.
[23] В соответствии со вторым аспектом настоящего изобретения обеспечен способ управления многонасосной системой, содержащий этапы, на которых:
a) запускают конфигурационный цикл нулевого расхода путем увеличения скорости по меньшей мере одного насоса в дополнение к подмножеству j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос начал оказывать влияние на общий расход, и
определяют аппроксимированную характеристику  насоса и/или энергопотребление
насоса и/или энергопотребление  , где ω0 - скорость по меньшей мере одного ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход; и/или
, где ω0 - скорость по меньшей мере одного ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход; и/или
b) запускают конфигурационный цикл нулевого расхода путем уменьшения скорости по меньшей мере одного насоса подмножества j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос прекратил оказывать влияние на общий расход, и
определяют аппроксимированную характеристику насоса и/или энергопотребление , где ω0 - скорость по меньшей мере одного замедляющегося насоса в момент, когда он прекращает оказывать влияние на общий расход.
[24] Дополнительно общий напор и/или расход могут поддерживаться по существу постоянными во время ускорения/замедления по меньшей мере одного насоса. В варианте a), т.е. при ускорении по меньшей мере одного насоса в дополнение к уже работающему подмножеству j, подмножество j может обеспечивать по существу постоянное давление, и ускоряющийся насос не оказывает влияния на расход до тех пор, пока не будет достигнута скорость ω0, которая как раз достаточна для обеспечения постоянного давления. Аналогично в варианте b), т.е. при замедлении по меньшей мере одного насоса из работающего подмножества j, подмножество j может обеспечивать по существу постоянное давление, и замедляющийся насос продолжает оказывать влияние на расход до тех пор, пока его скорость не опустится ниже скорости ω0, которая является минимально необходимой для обеспечения постоянного давления. В обоих случаях это вызывает резкое изменение сигнала, которое может проявляться в виде резкого скачка или падения на графике, на котором регистрируется скорость, давление или энергопотребление во время изменения скорости.
[25] Дополнительно изменение принимаемого сигнала может быть определено путем определения, является ли абсолютное значение градиента напора Δp, скорости ωj и/или энергопотребления P равным или превышающим заданное пороговое значение. Дополнительно для определения изменения принимаемого сигнала используют алгоритм обнаружения изменений, например, алгоритм кумулятивных сумм (CUSUM).
[26] Алгоритм CUSUM особенно полезен для определения изменений среднего значения сигнала. Например, с учетом графика сигнала с течением времени, где скорость, давление или энергопотребление являются сигналом, положительные и отрицательные отклонения сигнала от его среднего значения могут быть суммированы в отслеживаемую величину. Если отслеживаемая величина равна или превышает определенное пороговое значение, среднее значение может быть интерпретировано как изменившееся. Для позволения некоторого шума сигнала без превышения шумом порогового значения постоянная величина может быть вычтена/добавлена к отслеживаемой величине для каждой выборки. Логика CUSUM для каждого сигнала может быть описана следующими уравнениями:
 ,
,
где Jω - отслеживаемая величина для скорости ω, а JΔp - отслеживаемая величина для напора Δp. Сигналы здесь нормализованы также, как постоянные величины γω и γΔp. Разница в знаке между Jω и JΔp обусловлена ожиданием, что скорость ω будет резко уменьшаться, когда ускоряющийся насос начнет оказывать влияние на расход q, тогда как напор Δp будет резко увеличиваться из-за этого возмущения. Пороговые значения βω и βΔp могут быть определены для проверки справедливости выражения Jω<-βω и/или JΔp>βΔp, и в этом случае для использования текущих значений ω и Δp для решения следующих уравнений для определения параметра c:
Определение параметра z может быть аналогичным образом основано на аппроксимации энергопотребления полиномом второго порядка.
[27] Для плавного и энергоэффективного включения/отключения насоса относительно уже работающего подмножества j из i насосов, способ может содержать этапы, на которых:
a) увеличивают скорость k насосов в дополнение к подмножеству j из i насосов многонасосной системы, содержащей N насосов и работающей со скоростью ωj, обеспечивая общий напор Δp, где N≥2, 1≤k<N и 1≤i<N, и
замедляют i насосов подмножества j со скорости ωj до меньшей скорости ωm, где скорость ωm - скорость, необходимая для обеспечения подмножеством m из i+k насосов общего напора Δp; и/или
b) уменьшают скорость k насосов подмножества j из i насосов многонасосной системы, содержащей N насосов и работающей со скоростью ωj, обеспечивая общий напор Δp, где N≥2, 1≤k<i и 1<i≤N, и
ускоряют i-k насосов остаточного подмножества r со скорости ωj до большей скорости ωr, где скорость ωr - скорость, необходимая для обеспечения остаточным подмножеством r из i-k насосов общего напора Δp.
[28] Дополнительно способ может содержать этап, на котором поддерживают общий напор Δp постоянным при ускорении/замедлении. Дополнительно ускорение/замедление соответствует по меньшей мере одной заданной модельной кривой.
[29] Например, в варианте a) напор может быть параметризован для подмножества j из i работающих насосов до того, как k насосов достигнут скорости ωm, следующим образом:
 , где qj - расход, обеспечиваемый подмножеством j до того, как k дополнительных насосов начинают оказывать влияние на расход. Разность давлений, обеспечиваемая k дополнительными насосами, может быть параметризована как
, где qj - расход, обеспечиваемый подмножеством j до того, как k дополнительных насосов начинают оказывать влияние на расход. Разность давлений, обеспечиваемая k дополнительными насосами, может быть параметризована как  , где qk - расход, обеспечиваемый k дополнительными насосами до того, как они начинают оказывать влияние на расход. Наиболее вероятно, что к подмножеству j необходимо добавить только один насос, так что k=1 и
, где qk - расход, обеспечиваемый k дополнительными насосами до того, как они начинают оказывать влияние на расход. Наиболее вероятно, что к подмножеству j необходимо добавить только один насос, так что k=1 и  . После ускорения ожидается, что подмножество j будет обеспечивать
. После ускорения ожидается, что подмножество j будет обеспечивать  от общего расхода q, тогда как дополнительный насос будет обеспечивать
от общего расхода q, тогда как дополнительный насос будет обеспечивать  от общего расхода q. Однако до того как дополнительный насос достигнет скорости ωm, ожидается, что подмножество j будет обеспечивать весь общий расход q, тогда как дополнительный насос не будет оказывать влияния на общий расход q. Это может быть выражено следующим образом:
от общего расхода q. Однако до того как дополнительный насос достигнет скорости ωm, ожидается, что подмножество j будет обеспечивать весь общий расход q, тогда как дополнительный насос не будет оказывать влияния на общий расход q. Это может быть выражено следующим образом:


где qjs - вклад подмножества j в расход в начале ускорения, qje - вклад подмножества j в расход в конце ускорения, q1s - вклад дополнительного насоса в расход в начале ускорения, и q1e - вклад дополнительного насоса в расход в конце ускорения. Темп изменения qjs и qje может быть задан таким же, как темп изменения q1s и q1e, в соответствии с условиями:

 ,
,
где параметр α изменения скорости варьируется в диапазоне от 0 в начале ускорения до 1 в конце ускорения. Объединенный общий расход q всегда представляет собой сумму qj и q1 и, следовательно, постоянен во время ускорения для всех значений α. Общий напор Δp также постоянен во время ускорения для всех значений α. Соответствующие скорости ωj и ω1 могут быть определены следующим образом:
где обе конечные скорости ωje и ω1e являются одинаковыми и равны ωm в конце ускорения, т.е. при α=1, причем после ускорения работает подмножество m из i+1 насосов. Вышеуказанный пример аналогично применим к варианту b), в котором замедляют один или более насосов подмножества j.
[30] Дополнительно способ может дополнительно содержать этапы, на которых:
запускают n разных подмножеств из i насосов многонасосной системы, содержащей N насосов, во время n разных конфигурационных циклов со скоростью ωj, где N≥2, 2≤n≤2N-1 и 1≤i≤N, причем каждый конфигурационный цикл j Є {1,…,n} связан с подмножеством j Є {1,…,n} и скоростью ωj,
принимают сигналы, указывающие рабочие параметры, от каждого подмножества j во время связанного конфигурационного цикла j,
определяют аппроксимированную характеристику Δp=f(q,ωj) насоса на основе принимаемых сигналов для каждого подмножества j и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q,
сохраняют аппроксимированную характеристику Δp=f(q,ωj) насоса или указывающие ее параметры.
[31] Дополнительно способ может содержать этапы, на которых определяют аппроксимированное энергопотребление P=f(q,ωj) насоса на основе принимаемых сигналов для каждого подмножества j и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q, и сохраняют аппроксимированное энергопотребление P=f(q,ωj) или указывающие его параметры.
[32] Дополнительно способ может содержать этап, на котором определяют подмножество k с минимальным энергопотреблением для требуемой нагрузки на основе аппроксимированного энергопотребления P=f(q,ωj) и/или аппроксимированной характеристики Δp=f(q,ωj) насоса, сохраненных в модуле хранения. Дополнительно способ может содержать этап, на котором обеспечивают работу многонасосной системы с определенным подмножеством k, имеющим минимальное энергопотребление для требуемой нагрузки.
[33] Например, после определения аппроксимированной характеристики Δp=f(q,ωj) насоса она может быть использована для определения наиболее энергоэффективного числа насосов для работы многонасосной системы. Оно может даже не зависеть от требуемой нагрузки, т.е. требуемого расхода и давления. Расход в принципе может быть определен либо на основе аппроксимированной характеристики Δp=f(q,ωj) насоса, либо аппроксимированного энергопотребления P=f(q,ωj), однако каждый вариант может обеспечивать два решения из-за квадратичных членов при использовании в качестве аппроксимации полинома второго порядка. Таким образом, предпочтительно использовать сочетание Δp=f(q,ωj) и P=f(q,ωj), чтобы сократить квадратичные члены и оставить только одно решение. Это показано в следующих уравнениях:
[34] Поскольку все подмножества j с числом i насосов могут считаться эквивалентными друг другу, скорость ωj обозначена здесь как ωi, т.е. скорость любого подмножества j из i насосов. Расход q в последнем уравнении потенциально может быть неопределенным, если xb=ay, что означало бы, что Δp=f(q,ωi) и P=f(q,ωi) имеют свой максимум при одинаковом расходе q. Как правило, это не так, поскольку энергопотребление стремится к своему максимуму при высоких расходах, тогда как напор Δp обычно максимален при низких расходах. После определения q в вышеприведенном уравнении может быть вычислено, является ли работа многонасосной системы более энергоэффективной с одним дополнительным насосом или с одним отключенным насосом. Для выполнения этого сравнения может быть определена итоговая скорость для обоих случаев:
 ,
,
[35] Уравнение может иметь два решения, одно из которых может быть исключено, так что:
Для того чтобы получить ожидаемую скорость ωi+1, т.е. скорость любого подмножества j из i+1 насосов, и ожидаемую скорость ωi-1, т.е. скорость любого подмножества j из i-1 насосов, в вышеприведенном уравнении параметр i заменяется на i+1 и i-1 соответственно.
[36] После определения ожидаемых скоростей ωi+1 и ωi-1 может быть вычислено соответствующее энергопотребление P=f(q,ωi). Затем можно определить, какой из следующих вариантов потребляет минимальную энергию: 1. продолжение работы с i насосами подмножества j, как есть, 2. добавление другого насоса к подмножеству j, или 3. отключение одного насоса из подмножества j. Логика принятия решений для нахождения оптимального числа i работающих насосов может быть сформулирована следующим образом:

Здесь P(q,i,ωi) может представлять текущее энергопотребление работающего подмножества j из i насосов так, что оно может быть принято в качестве текущего измеренного значения, тогда как прогнозируемые значения P(q,i-1,ωi-1) и P(q,i+1,ωi+1) могут быть определены на основе аппроксимированного энергопотребления P=f(q,ωi).
[37] Вышеуказанное определение, является ли работа с одним дополнительным или одним отключенным насосом более энергоэффективной, чем с текущим числом работающих насосов, представляет собой простой пример использования аппроксимированных характеристик насоса и аппроксимированного энергопотребления для более энергоэффективной работы многонасосной системы. Однако конфигурационные циклы также позволяют регистрировать множества параметров для любого подмножества j, так что можно определить точное подмножество насосов, которое потребляет минимальную энергию для требуемой нагрузки. Например, один из четырех вариантов работы подмножества трех из четырех насосов может потреблять меньше энергии, чем три других варианта. В связи с этим может быть определено не только оптимальное число работающих насосов, но также и какое именно подмножество следует выбрать для этого. Однако это может меняться с течением времени и в зависимости от отработанных часов из-за износа. Регулярные запуски конфигурационных циклов позволяют обновлять аппроксимированные характеристики насоса и/или аппроксимированное энергопотребление для учета таких изменений.
[38] Дополнительно вышеуказанный алгоритм может содержать два ограничительных критерия, один из которых предотвращает превышение максимальной мощности насоса, а другой предотвращает несоблюдение минимального расхода. Что касается первого ограничения, некоторые насосы могут быть оборудованы частотно-регулируемым приводом (VFD), который не может обеспечивать работу насоса на полной скорости при любых условиях без несоблюдения максимальной мощности VFD. Если вышеуказанный алгоритм определяет, что подмножество из i-1 насосов потребляет меньше энергии, оставшиеся i-1 насосов не должны превышать максимальную мощность VFD, которая иногда не известна заранее. В случае, когда максимальная мощность VFD не известна, она может быть определена в одном или более конфигурационных циклах путем регистрации энергопотребления в момент, когда фактическая скорость насоса не соответствует заданной скорости, так как достигнута максимальная мощность VFD. Таким образом, алгоритм принятия решений может учитывать зарегистрированную максимальную мощность, не замедляя насос, если остаточное подмножество из i-1 насосов превысит максимальную мощность на насос.
[39] Что касается второго ограничения, текучая среда в некоторых насосах, в частности, в многоступенчатых центробежных насосах, т.е. так называемых CR-насосах, не должна становиться слишком горячей, и, следовательно, требуется минимальный расход. Однако в вышеописанном процессе расход может быть неизвестной величиной в произвольных единицах и может быть разделен пополам при добавлении насоса к работающему подмножеству из одного насоса или может быть уменьшен на треть для каждого насоса при добавлении насоса к работающему подмножеству из двух насосов. В связи с этим наличие достаточного расхода для каждого насоса не может быть гарантировано. Однако расход может быть «откалиброван» в единицы м³/с путем его оценки традиционным образом, т.е. может быть оценен минимальный расход, который меньше реального расхода. Это может быть выполнено путем справедливого предположения, что при максимальном энергопотреблении эффективность выше 50%. При максимальном энергопотреблении нормализованный расход может быть выведен на основе параметров следующим образом:
Этот расход может быть подставлен в уравнения для Δp и P, где эффективность e традиционно считается равной 50%, и вводится коэффициент α пересчета следующим образом:
что задает следующие калибровочные условия:
При этих условиях, если эффективность составляла 50% в точке максимальной мощности, аппроксимированный расход был бы задан в единицах м³/с. Если реальная эффективность выше, реальный расход также выше. В случае если точка максимальной мощности превысила максимальную мощность VFD, может быть использована максимальная мощность VFD, обеспечивающая два решения для расхода, меньшее из которых может быть консервативно выбрано для подстановки в уравнения для Δp и P, как указано выше. Таким образом, алгоритм может гарантировать, что на каждый насос всегда приходится достаточный расход.
[40] Дополнительно способ может содержать этап, на котором запускают i насосов подмножества j с одинаковой скоростью ωj во время конфигурационного цикла j, причем скорость ωj i насосов подмножества j в конфигурационном цикле j отличается от скорости ωk s насосов подмножества k в другом конфигурационном цикле k, где j≠s, причем общий напор Δp, создаваемый многонасосной системой, является по существу одинаковым для обоих конфигурационных циклов j, k.
[41] Дополнительно способ может содержать этап, на котором определяют аппроксимированную характеристику Δp=f(q,ωj) насоса путем определения параметров a, b и c полинома второго порядка  , где ωj - скорость i насосов подмножества j. Альтернативно или в дополнение способ может содержать этап, на котором определяют аппроксимированное энергопотребление P=f(q,ωj) путем определения параметров x, y и z полинома второго порядка
, где ωj - скорость i насосов подмножества j. Альтернативно или в дополнение способ может содержать этап, на котором определяют аппроксимированное энергопотребление P=f(q,ωj) путем определения параметров x, y и z полинома второго порядка  , где ωj - скорость i насосов подмножества j.
, где ωj - скорость i насосов подмножества j.
[42] Дополнительно способ может содержать этап, на котором определяют аппроксимированную характеристику Δp=f(q,ωj) насоса и/или энергопотребления P=f(q,ωj) методом наименьших квадратов, если число конфигурационных циклов равно или превышает число определяемых параметров. Таким образом, если множество параметров является переопределенным, могут быть определены «усредненные» параметры с помощью полиномиального регрессионного анализа или подобного статистического метода для использования избыточной информации из конфигурационных циклов. Таким образом, износ, обрастание, другие формы снижения эффективности или различия между насосами из-за технологических допусков могут быть сглажены и, следовательно, приняты во внимание. Кроме того, во время избыточных конфигурационных циклов могут быть определены выбросы, чтобы отбросить их при усреднении, и/или определить и запретить работу низкоэффективных насосов многонасосной системы. Такие определенные низкоэффективные насосы могут быть отмечены как нуждающиеся в обслуживании, ремонте или замене.
[43] Описанный выше способ может быть реализован в форме скомпилированного или нескомпилированного программного кода, который хранится на машиночитаемом носителе с командами для выполнения способа. Альтернативно или в дополнение способ может выполняться программным обеспечением в облачной системе, т.е. один или более модулей системы управления, в частности, модуль обработки, могут быть реализованы в облачной системе.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[44] В дальнейшем изобретение поясняется описанием вариантов его осуществления со ссылкой на сопровождающие чертежи, на которых:
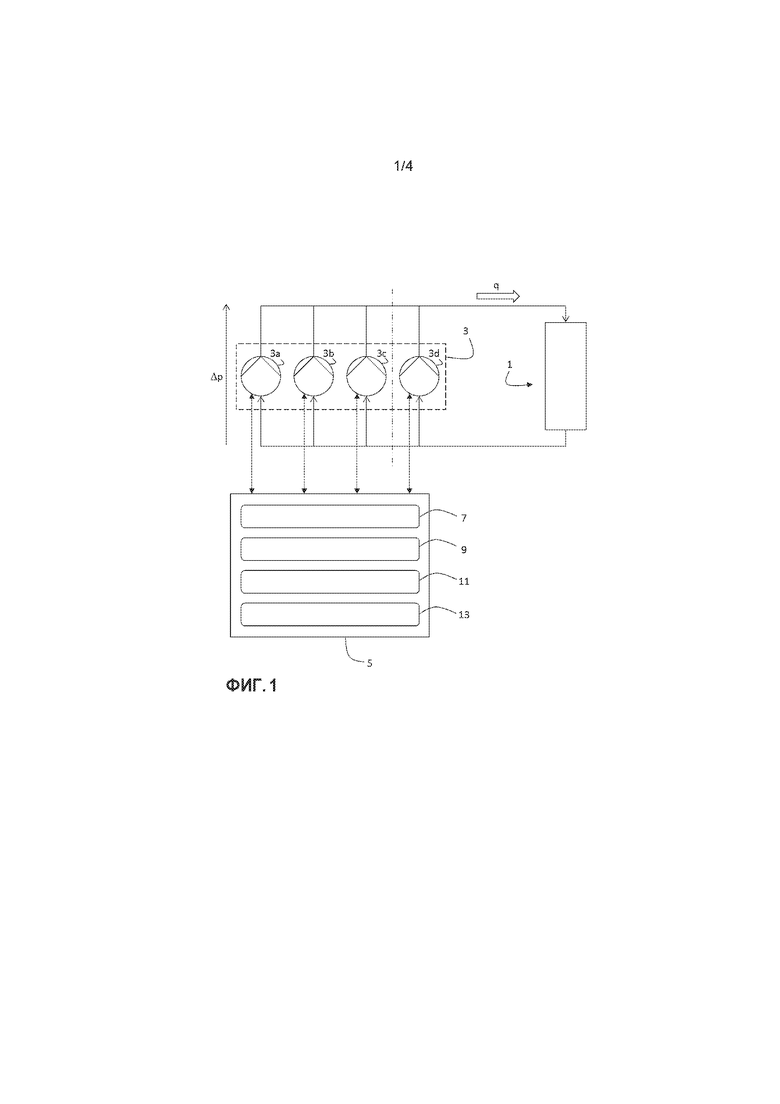
Фиг. 1 показывает сеть для подачи текучей среды, питаемую многонасосной системой под управлением примерной системы управления множеством насосов в соответствии с настоящим изобретением;
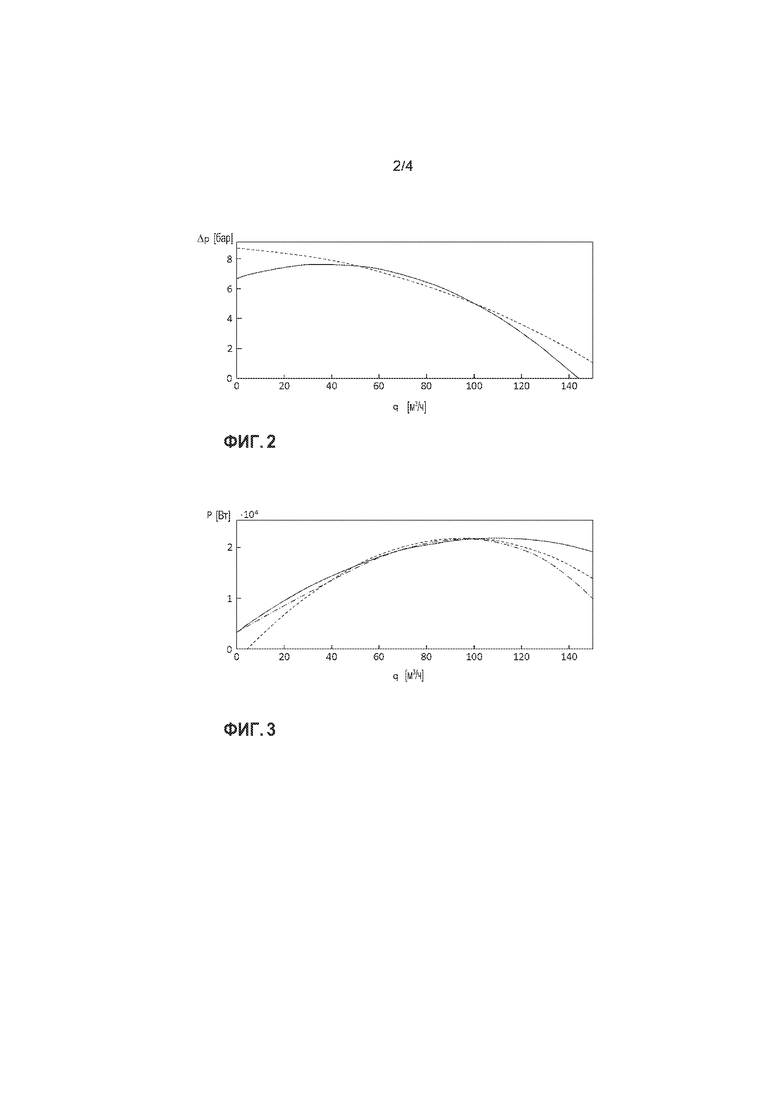
Фиг. 2 показывает график аппроксимированной характеристики насоса;
Фиг. 3 показывает график аппроксимированного энергопотребления;
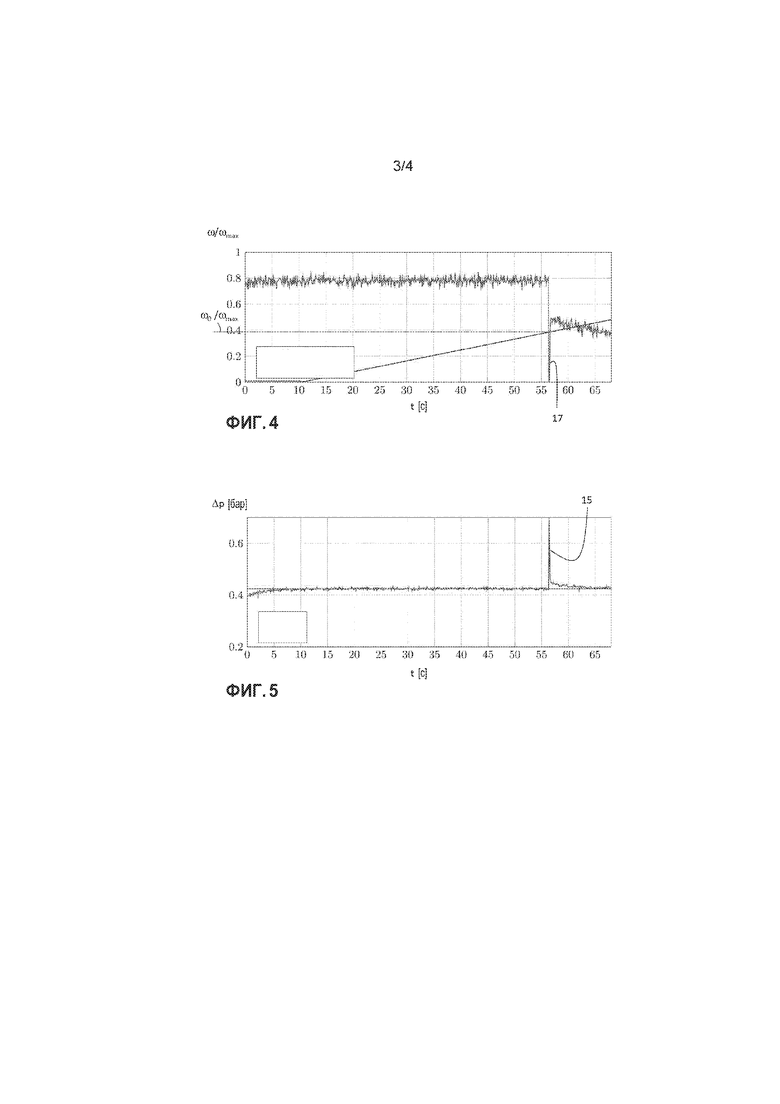
Фиг. 4 показывает график скорости насоса во время ускорения дополнительного насоса при уже работающем подмножестве насосов;
Фиг. 5 показывает график общего напора во время ускорения дополнительного насоса при уже работающем подмножестве насосов;
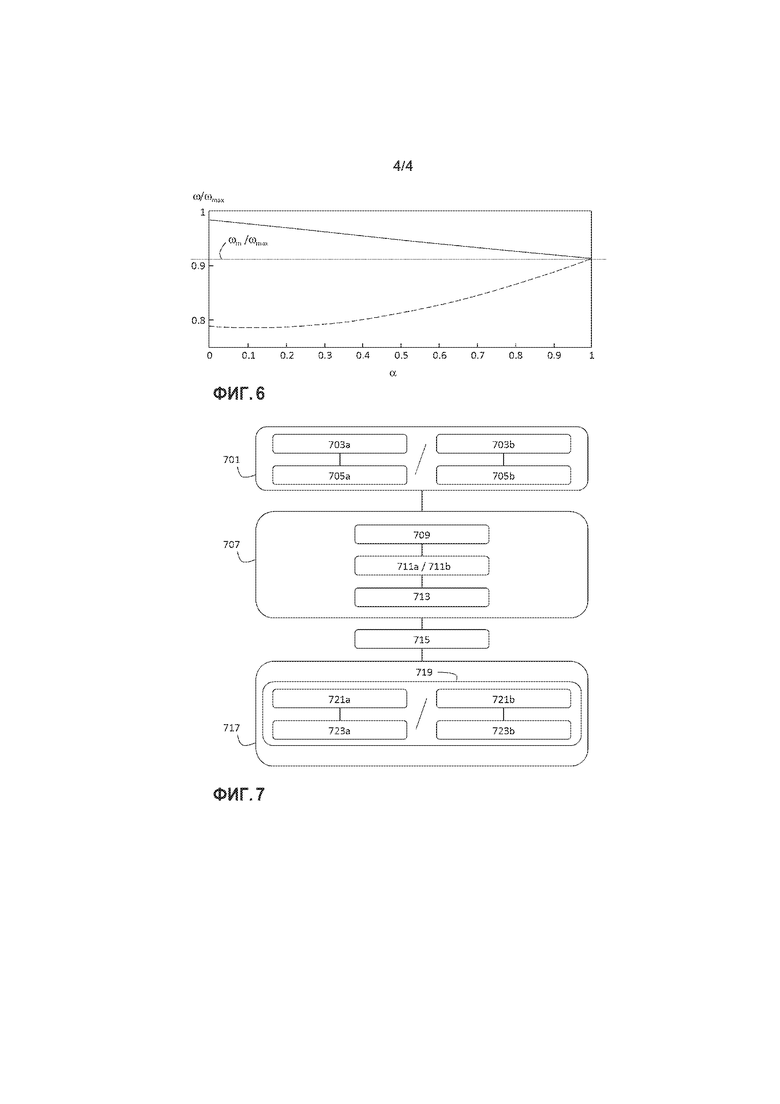
Фиг. 6 показывает график скорости во время оптимизированного ускорения дополнительного насоса и замедления уже работающего подмножества насосов; и
Фиг. 7 показывает блок-схему примерного способа в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ
[45] Фиг. 1 показывает сеть 1 для подачи текучей среды, питаемую многонасосной системой 3 из четырех насосов 3a, 3b, 3c 3d. Сеть 1 для подачи текучей среды может, например, представлять собой контур нагрева или охлаждения. Сеть 1 для подачи текучей среды не должна быть замкнутым контуром. Она может содержать два резервуара, в которых установлена многонасосная система 3 для перекачивания текучей среды, например, воды, из одного резервуара в другой. В настоящем примере насосы 3a, 3b, 3c 3d многонасосной системы 3 установлены параллельно. Насосы 3a, 3b, 3c 3d настоящего примера также номинально относятся к одному типу и имеют одинаковый размер.
[46] Система 5 управления множеством насосов, содержащая модуль 7 управления, модуль 9 обработки, интерфейс 11 связи и модуль 13 хранения, находится в прямом или опосредованном беспроводном или проводном коммуникационном сообщении с насосами 3a, 3b, 3c 3d. Интерфейс 11 связи выполнен с возможностью передачи сигналов и приема сигналов от насосов 3a, 3b, 3c 3d. Модуль 9 обработки выполнен с возможностью обработки принимаемых сигналов и выполнения вычислений на основе принимаемых сигналов. Модуль 13 хранения выполнен с возможностью хранения результатов вычислений. Модуль 7 управления выполнен с возможностью управления работой насосов на основе сохраненных результатов путем подачи команд через интерфейс 11 связи насосам 3a, 3b, 3c 3d. Следует отметить, что модуль 7 управления, модуль 9 обработки, интерфейс 11 связи и модуль 13 хранения могут быть физически распределены в системе 5, которая не должна содержаться в едином блоке. Два или более модулей могут быть объединены, так что функциональность более чем одного модуля может обеспечиваться объединенным модулем.
[47] Например, система 5 управления множеством насосов может постоянно, регулярно или спорадически проверять, является работающее в настоящее время подмножество насосов наиболее энергоэффективным режимом работы с точки зрения обеспечения требуемого общего расхода q и требуемого общего напора Δp в сети 1 для подачи текучей среды. Требуемый общий расход q и требуемый общий напор Δp могут быть обусловлены требуемой общей нагрузкой. Например, четыре насоса 3a, 3b, 3c 3d могут обеспечивать определенную максимальную нагрузку, только 75% которой требуется для сети 1 для подачи текучей среды в настоящее время. Таким образом, система 5 управления множеством насосов может запускать три насоса на максимальной скорости, при этом имеется четыре варианта того, какой из насосов следует отключить, например, 3d. Другой вариант заключается в запуске всех четырех насосов 3a, 3b, 3c 3d на 75% от их максимальной скорости. При условии, что все насосы работающего подмножества должны работать с одинаковой скоростью, система 5 управления множеством насосов имеет пять вариантов, все из которых могут показывать разное энергопотребление.
[48] Однако запуск системы с максимальной энергоэффективностью является непростой задачей, если недоступно измерение расхода, и неизвестны текущие характеристики насоса. Например, характеристики насоса могут быть неизвестны в случае установки системы 5 управления множеством насосов на уже установленную многонасосную систему 3. Даже если они были изначально известны, они могли проявить неизвестные производственные отклонения или могли измениться с течением времени из-за старения, износа или обрастания. Таким образом, подход заключается в определении максимально энергоэффективного подмножества для требуемой нагрузки при отсутствии информации о текущем расходе и текущих характеристиках насоса.
[49] Для аппроксимации характеристик насоса модуль 7 управления выполнен с возможностью запуска определенного числа, т.е. n, разных конфигурационных циклов. Каждый конфигурационный цикл может быть помечен индексом j. Каждый конфигурационный цикл запускается с разным подмножеством насосов 3a, 3b, 3c 3d. Поскольку для получения информации подмножество должно отличаться для разных конфигурационных циклов, каждое подмножество может быть помечено одинаковым индексом j. При условии, что N=4 - общее число насосов в многонасосной системе 3, а i - число насосов в подмножестве j, применяются следующие условия: N≥2, 2≤n≤2N-1 и 1≤i≤N. Во время каждого конфигурационного цикла i насосов подмножества j работают с одинаковой постоянной скоростью ωj. Скорость адаптируется к разным конфигурационным циклам для поддержания одинакового общего напора, т.е. разности Δp давлений. Измеренная и обнаруженная разность Δpj давлений и зарегистрированная скорость ωj передаются в модуль 7 управления через интерфейс 11 связи, который выполнен с возможностью приема сигналов, указывающих рабочие параметры, от каждого подмножества j во время связанного конфигурационного цикла j. Модуль обработки выполнен с возможностью определения аппроксимированной характеристики насоса в виде полинома второго порядка
на основе допущения, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q. Контрольный расход q может представлять собой измеренное или нормализованное значение, т.е. он может быть произвольно задан как q=1. Модуль хранения выполнен с возможностью сохранения аппроксимированной характеристики насоса или указывающих ее параметров, т.е. a, b и c.
[50] Кроме того, в каждом конфигурационном цикле выполняется аппроксимация энергопотребления Pj=f(q,ωj) полиномом второго порядка

на основе допущения, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q. Параметры x, y и z представляют собой параметры, указывающие энергопотребление, и хранятся в модуле хранения.
[51] Таким образом, шесть параметров a, b, c, x, y и z могут быть определены из шести уравнений, полученных в ходе трех конфигурационных циклов с подмножествами из разного числа насосов. Таким образом, предпочтительно число работающих насосов i должно изменяться в разных циклах. Если многонасосная система содержит только два насоса, т.е. N=2, для предварительного определения параметров c и z может быть использован конфигурационный цикл нулевого расхода (дополнительно рассмотрен ниже), так что остальные четыре параметра также определяются из четырех уравнений, полученных путем запуска первого конфигурационного цикла с одним насосом и второго цикла с двумя насосами.
[52] Следующая таблица может иллюстрировать варианты запуска конфигурационных циклов для системы 3 из четырех насосов 3a, 3b, 3c 3d, как показано на Фиг. 1. Состояние всех насосов проиллюстрировано двоичным числом с N=4 битами, где каждый бит представляет насос, т.е. 0 означает «выключено», 1 означает «включено», и двоичный вес представляет число i насосов в текущем подмножестве j:
0 - «выключено», 1 - «включено»
1100 или 1001 или 1010
[53] Запуск более трех конфигурационных циклов приведет к переопределенности множества параметров. Общее число перестановок для работающих подмножеств составляет 2N-1, т.е. в данном случае 24-1=15. Для учета различий между насосами, обусловленных технологическими допусками, износом или обрастанием, более трех конфигурационных циклов позволяют «усреднение» для насосов. Таким образом, аппроксимация может быть ближе к реальным характеристикам насоса в насосной системе.
[54] Простой случай запуска трех конфигурационных циклов, например, первого цикла (j=1) с одним (i=1) насосом, второго цикла (j=2) с двумя (i=2) насосами и третьего цикла (j=3) с тремя (i=3) насосами, может быть реализован в виде алгоритма (здесь в виде метаязыка в стиле C) следующим образом:
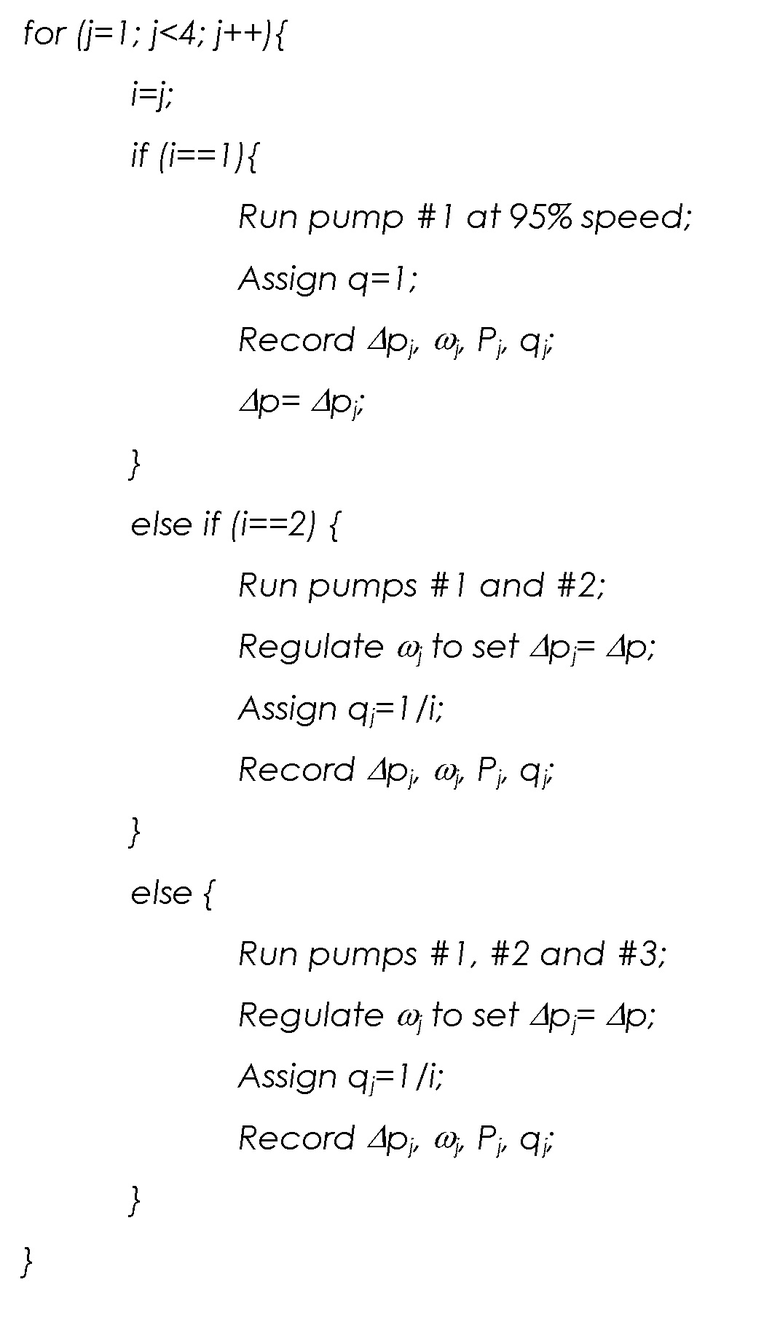
[55] Более трех конфигурационных циклов могут быть реализованы в виде алгоритма (здесь в виде метаязыка в стиле C) следующим образом:
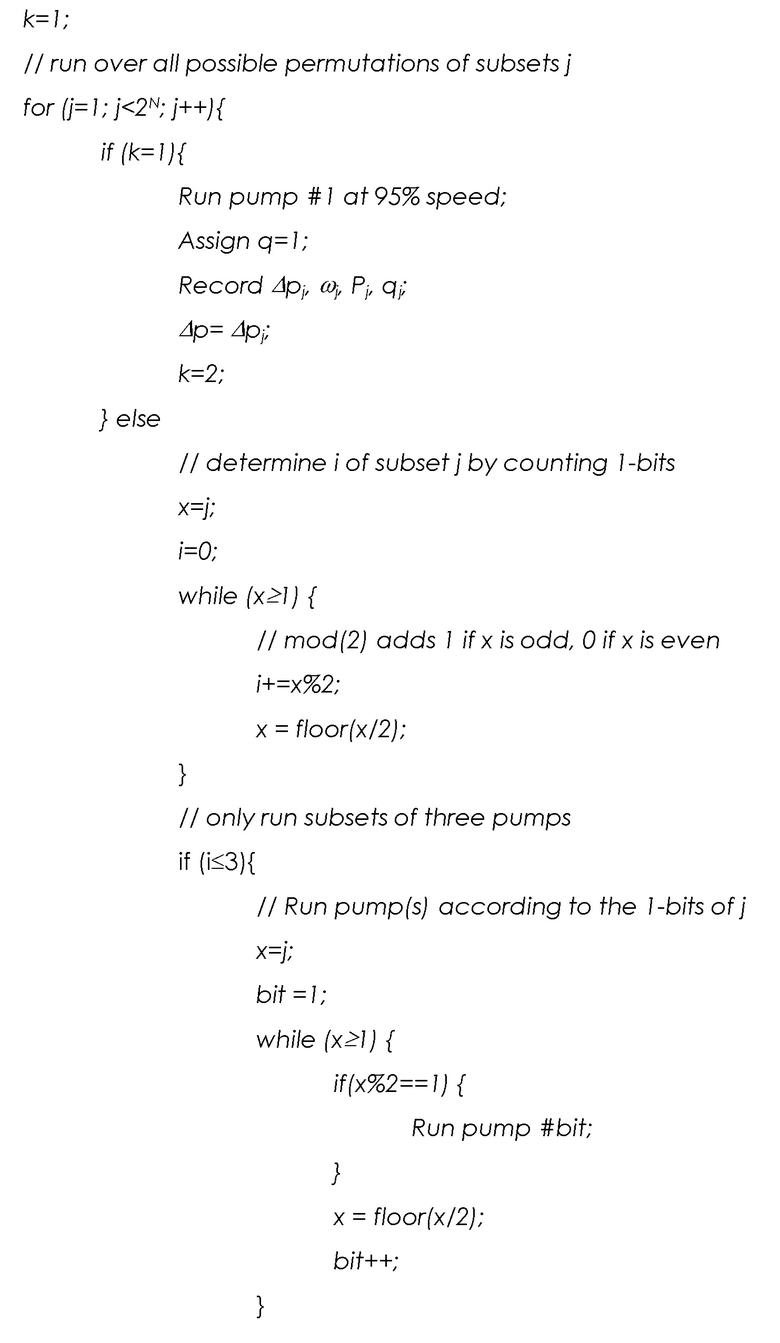
[56] В приведенном выше примере для N=4 насосов алгоритм будет выполнять четыре цикла с одним насосом, шесть циклов с двумя насосами и четыре цикла с тремя насосами, т.е. 14 циклов в сумме. Для нахождения средних значений параметров a, b, c, x, y и z может быть использован метод наименьших квадратов. Кроме того, во время избыточных конфигурационных циклов могут быть определены выбросы, чтобы отбросить их при усреднении, и/или определить и запретить работу низкоэффективных насосов многонасосной системы 3. Такие определенные низкоэффективные насосы могут быть отмечены как нуждающиеся в обслуживании, ремонте или замене. Предпочтительно запускать только подмножества из трех насосов, так как циклы с участием подмножеств из нескольких насосов лишь немного отличаются от циклов с участием подмножеств с одним дополнительным или отключенным насосом. Однако, в принципе конфигурационные циклы могут быть запущены с любым числом насосов i≤N.
[57] Фиг. 2 и 3 показывают итоговые полиномиальные аппроксимации пунктирной линией. В некоторых случаях, как показано пунктирными линиями, полиномиальные аппроксимации могут быть неточными в некоторых областях. Например, пунктирные линии прогнозируют отрицательное энергопотребление при очень низком расходе, что, очевидно, неверно. Это может быть устранено путем запуска нулевого конфигурационного цикла, как рассмотрено далее.
[58] Перед конфигурационным циклом нулевого расхода многонасосной системы 3 с четырьмя насосами 3a, 3b, 3c и 3d, может работать только подмножество из трех насосов 3a, 3b и 3c со скоростью ωj, тогда как насос 3d не работает. Во время конфигурационного цикла нулевого расхода выполняют ускорение насоса 3d. До тех пор, пока разность давлений, обеспечиваемая текущей скоростью насоса 3d, ниже общего напора Δp, насос 3d не оказывает влияния на общий расход. После того, как интерфейс 11 связи принимает изменение сигнала, указывающее, что по меньшей мере один насос начал оказывать влияние на общий расход, регистрируется текущая скорость ω0 насоса 3d в момент, когда насос 3d начинает оказывать влияние на общий расход. Далее может быть определен параметр c из уравнения  . Параметр c, определенный в конфигурационном цикле нулевого расхода, может быть использован для улучшения полиномиальных аппроксимаций, как показано сплошными линиями на Фиг. 2 и 3. Как может быть видно, здесь отсутствует прогноз отрицательного энергопотребления при низком расходе. Энергопотребление обычно следует по слегка S-образной кривой, которая лучше аппроксимируется полиномом третьего порядка. Однако сравнение с полиномом третьего порядка для аппроксимации энергопотребления на Фиг. 3 (штрихпунктирная линия) показывает, что общий прогноз аппроксимации второго порядка (сплошная линия) довольно точен до максимального энергопотребления при расходе около 100 м³/ч после корректировки конфигурационным циклом нулевого расхода.
. Параметр c, определенный в конфигурационном цикле нулевого расхода, может быть использован для улучшения полиномиальных аппроксимаций, как показано сплошными линиями на Фиг. 2 и 3. Как может быть видно, здесь отсутствует прогноз отрицательного энергопотребления при низком расходе. Энергопотребление обычно следует по слегка S-образной кривой, которая лучше аппроксимируется полиномом третьего порядка. Однако сравнение с полиномом третьего порядка для аппроксимации энергопотребления на Фиг. 3 (штрихпунктирная линия) показывает, что общий прогноз аппроксимации второго порядка (сплошная линия) довольно точен до максимального энергопотребления при расходе около 100 м³/ч после корректировки конфигурационным циклом нулевого расхода.
[59] Фиг. 4 и 5 показывают резкое изменение сигнала скорости (Фиг. 3) и давления (Фиг. 5), когда дополнительный насос 3d начинает оказывать влияние на расход. В начале фазы ускорения три работающих насоса 3a, 3b, 3c работают постоянно на около 80% от их максимальной скорости и обеспечивают весь расход. Насос 3d линейно ускоряется на около 20% от максимальной скорости за 25 секунд. При достижении скорости ω0 на около 40% от максимальной скорости после около 57 секунд, разность давлений насоса 3d равна общему напору Δp, и насос 3d резко начинает оказывать влияние на расход. Модуль 7 управления немедленно реагирует для поддержания общего напора Δp постоянным путем уменьшения скорости работающих насосов 3a, 3b, 3c до около 40% от их максимальной скорости. Таким образом, система может сходиться к общей скорости нового подмножества из i+1 насосов, т.е. всех четырех насосов, обеспечивающих одинаковый общий напор Δp на около 40% от максимальной скорости. Однако резкое изменение сигнала показывает момент активного включения дополнительного насоса в работу в виде возмущения форме скачка (15) давления и резкого падения (17) скорости. Для обнаружения этого резкого изменения сигнала может быть использован алгоритм CUSUM.
[60] Дополнительно общий напор и/или расход могут поддерживаться по существу постоянными во время ускорения/замедления по меньшей мере одного насоса, как показано на Фиг. 5. В варианте a), т.е. при ускорении по меньшей мере одного насоса в дополнение к уже работающему подмножеству j, подмножество j может обеспечивать по существу постоянное давление, и ускоряющийся насос не оказывает влияния на расход до тех пор, пока не будет достигнута скорость ω0, которая как раз достаточна для обеспечения постоянного давления. Аналогично в варианте b) (не показан), т.е. при замедлении по меньшей мере одного насоса из работающего подмножества j, подмножество j может обеспечивать по существу постоянное давление, и замедляющийся насос продолжает оказывать влияние на расход до тех пор, пока его скорость не опустится ниже скорости ω0, которая является минимально необходимой для обеспечения постоянного давления. В обоих случаях это вызывает резкое изменение сигнала, которое может проявляться в виде резкого скачка или падения на графике, на котором регистрируется скорость, давление или энергопотребление во время изменения скорости.
[61] Дополнительно изменение принимаемого сигнала определяется путем определения, является ли абсолютное значение градиента напора Δp, скорости ωj и/или энергопотребления P равным или превышающим заданное пороговое значение. Дополнительно для определения изменения принимаемого сигнала используют алгоритм обнаружения изменений, например, алгоритм кумулятивных сумм (CUSUM).
[62] Алгоритм CUSUM особенно полезен для определения изменений среднего значения сигнала. Например, с учетом графика сигнала с течением времени, где скорость, давление или энергопотребление являются сигналом, положительные и отрицательные отклонения сигнала от его среднего значения могут быть суммированы в отслеживаемую величину. Если отслеживаемая величина равна или превышает определенное пороговое значение, среднее значение может быть интерпретировано как изменившееся. Альтернативно или в дополнение абсолютное значение градиента напора Δp, скорости ωj и/или энергопотребления P может быть измерено и подвергнуто сравнению с заданным пороговым значением. Если достигнуто или превышено пороговое значение, резкое изменение сигнала указывает, что по меньшей мере один насос начал оказывать влияние на общий расход.
[63] Возмущение полезно в нулевом конфигурационном цикле, но нежелательно для нормальной работы насоса, когда, например, блок управления принимает решение, что система будет потреблять меньше энергии с дополнительным насосом, и, следовательно, ускоряет другой насос. Дополнительно при нормальной работе модуль управления может быть выполнен с возможностью увеличения скорости насоса 3d в дополнение к подмножеству из трех насосов 3a, 3b, 3c, работающих со скоростью ωj, обеспечивая общий напор Δp, и одновременного замедления трех насосов 3a, 3b, 3c со скорости ωj до меньшей скорости ωm, где скорость ωm - скорость, необходимая для обеспечения новым подмножеством из четырех насосов общего напора Δp. Такое одновременное схождение скоростей показано на Фиг. 6, где параметр α варьируется в диапазоне от 0 (в начале изменения скорости) до 1 (в конце изменения скорости). Возмущение, как показано на Фиг. 4 и 5, для конфигурационных циклов нулевого расхода будет значительно уменьшено, так как работающее подмножество из трех насосов 3a, 3b, 3c уже имеет конечную скорость ωm, когда четвертый насос 3d начинает оказывать влияние на расход с такой же скоростью ωm. Поскольку любое возмущение показывает недостаточную энергоэффективность, это одновременное схождение экономит энергию и может называться «плавным включением/отключением насосов». Общий напор Δp и/или общий расход поддерживаются по существу постоянными во время изменения скорости для всех значений α.
[64] Знание скорости ω0 и аппроксимированного энергопотребления P=f(q,ωj) и/или аппроксимированной характеристики Δp=f(q,ωj) насоса может позволять модулю управления выполнять ускорение/замедление в соответствии с по меньшей мере одной заданной модельной кривой. Таким образом, время схождения после того, как дополнительные насосы активно начинают оказывать влияние на расход, может быть значительно уменьшено, так как может быть спрогнозирована конечная скорость ωm. Соответствие заданной модельной кривой может автоматически приводить к постоянному общему напору Δp и/или общему расходу для всех значений α. В связи с этим нет необходимости контура обратной связи для управления на основе отслеживаемых измеряемых значений.
[65] При замедлении одного или более насосов из работающего подмножества параметр α аналогичным образом изменяется в диапазоне от 1 (в начале изменения скорости) до 0 (в конце изменения скорости). Подобным образом также могут быть запущены конфигурационные циклы нулевого расхода путем замедления одного или более насосов из работающего подмножества и регистрации скорости, при которой замедляющийся насос (насосы) резко прекращает оказывать влияние на общий расход.
[66] Фиг. 7 показывает примерные этапы способа в определенном порядке. Однако способ может быть реализован с этапами в другом порядке, или этапы способа могут повторяться или выполняться параллельно с другими этапами способа. На Фиг. 7 запускают (701) конфигурационный цикл нулевого расхода путем увеличения (703a) скорости одного насоса в дополнение к подмножеству j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что насос начал оказывать влияние на общий расход, и определяют (705a) аппроксимированную характеристику  насоса и энергопотребление
насоса и энергопотребление  , где ω0 - скорость ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход. Альтернативно или в дополнение запускают (701) конфигурационный цикл нулевого расхода путем уменьшения (703b) скорости одного насоса подмножества j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что насос прекратил оказывать влияние на общий расход, и определяют (705b) аппроксимированную характеристику насоса и энергопотребление , где ω0 - скорость замедляющегося насоса в момент, когда он прекращает оказывать влияние на общий расход.
, где ω0 - скорость ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход. Альтернативно или в дополнение запускают (701) конфигурационный цикл нулевого расхода путем уменьшения (703b) скорости одного насоса подмножества j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что насос прекратил оказывать влияние на общий расход, и определяют (705b) аппроксимированную характеристику насоса и энергопотребление , где ω0 - скорость замедляющегося насоса в момент, когда он прекращает оказывать влияние на общий расход.
[67] Способ, показанный на Фиг. 7, дополнительно содержит этап, на котором запускают (707) n разных конфигурационных циклов с участием подмножеств из i насосов, работающих со скоростью ωj. Во время каждого конфигурационного цикла j принимают (709) сигналы, указывающие рабочие параметры, от работающего подмножества j. Способ дополнительно содержит этап, на котором определяют (711a) аппроксимированную характеристику  насоса и определяют (711b) энергопотребление на основе принимаемых сигналов и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q. Затем сохраняют (713) характеристику насоса (или указывающие ее параметры a, b и c) и энергопотребление (или указывающие его параметры x, y и z).
насоса и определяют (711b) энергопотребление на основе принимаемых сигналов и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q. Затем сохраняют (713) характеристику насоса (или указывающие ее параметры a, b и c) и энергопотребление (или указывающие его параметры x, y и z).
[68] Затем определяют (715) подмножество k с минимальным энергопотреблением для требуемой нагрузки на основе аппроксимированного энергопотребления и/или аппроксимированной характеристики насоса, сохраненной в модуле 13 хранения. Затем обеспечивают (717) работу многонасосной системы с определенным подмножеством k, имеющим минимальное энергопотребление для требуемой нагрузки. Когда энергетически более эффективно изменить работающее подмножество на i+1 или i-1 насосов, может быть плавно включен/выключен (719) другой насос:
либо путем увеличения (721a) скорости насоса в дополнение к подмножеству j из i насосов, работающих со скоростью ωj, обеспечивая общий напор Δp, и замедления (723a) i насосов подмножества j со скорости ωj до меньшей скорости ωm, где скорость ωm - скорость, необходимая для обеспечения подмножеством m из i+1 насосов общего напора Δp; либо
путем уменьшения (721b) скорости насоса подмножества j из i насосов, работающих со скоростью ωj, обеспечивая общий напор Δp, и ускорения (723b) i-1 насосов остаточного подмножества r со скорости ωj до большей скорости ωr, где скорость ωr - скорость, необходимая для обеспечения остаточным подмножеством r из i-1 насосов общего напора Δp.
[69] При упоминании в вышеизложенном описании целых чисел или признаков, которые имеют известные, очевидные или предсказуемые эквиваленты, такие эквиваленты включены в настоящий документ, как если бы они были отдельно изложены. Для определения истинного объема настоящего изобретения, который должен толковаться как включающий в себя любые такие эквиваленты, следует ссылаться на формулу изобретения. Читателю также будет понятно, что целые числа или признаки изобретения, описанные как возможные, предпочтительные, преимущественные, подходящие или т.п., являются возможными и не ограничивают объем независимых пунктов формулы изобретения.
[70] Вышеописанные варианты выполнения следует понимать как иллюстративные примеры изобретения. Следует понимать, что любой признак, описанный в отношении любого варианта выполнения, может быть использован отдельно или в сочетании с другими описанными признаками, а также может быть использован в сочетании с одним или более признаками любого другого варианта выполнения или любого сочетания любых других вариантов выполнения. Хотя в настоящем документе показан и описан по меньшей мере один примерный вариант выполнения, следует понимать, что другие модификации, замены и альтернативы очевидны специалисту в данной области техники и могут быть выполнены без отклонения от объема изобретения, описанного в настоящем документе, и настоящая заявка предназначена для охвата любых адаптаций или изменений конкретных вариантов выполнения, рассмотренных в настоящем документе.
[71] В дополнение слово «содержащий» не исключает других элементов или этапов, и единственное число не исключает множественности. Кроме того, характеристики или этапы, описанные со ссылкой на один из вышеизложенных примерных вариантов выполнения, также могут быть использованы в сочетании с другими характеристиками или этапами других вышеописанных примерных вариантов выполнения. Этапы способа могут выполняться в любом порядке или параллельно или могут составлять часть или более подробный вариант другого этапа способа. Следует понимать, что в объем патента, основанного на настоящем документе, должны быть включены все такие модификации, которые обосновано и надлежащим образом попадают в объем его вклада в область техники. Такие модификации, замены и альтернативы могут быть выполнены без отклонения от замысла и объема изобретения, который должен быть определен на основе приложенной формулы изобретения и ее юридических эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ МНОЖЕСТВОМ НАСОСОВ | 2018 |
|
RU2689261C1 |
| МНОГОНАСОСНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2018 |
|
RU2698560C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МНОЖЕСТВОМ НАСОСОВ И КОМПЬЮТЕРНО-ЧИТАЕМЫЙ НОСИТЕЛЬ С ИНСТРУКЦИЕЙ ПО ИСПОЛНЕНИЮ СПОСОБА | 2021 |
|
RU2773352C1 |
| Способ управления насосными агрегатами | 2021 |
|
RU2762925C1 |
| АВТОМАТИЗИРОВАННАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ И АНАЛИЗА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ РАСХОДА ТЕПЛОНОСИТЕЛЯ НА МАГИСТРАЛЬНЫХ НАСОСНЫХ СТАНЦИЯХ | 2011 |
|
RU2473048C1 |
| АВТОМАТИЗИРОВАННАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ И АНАЛИЗА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ ОСНОВНЫХ ПОКАЗАТЕЛЕЙ РАБОТЫ НАСОСНЫХ СТАНЦИЙ С ЦЕНТРОБЕЖНЫМИ ЭЛЕКТРОНАСОСАМИ В СИСТЕМАХ ВОДОСНАБЖЕНИЯ И ВОДООТВЕДЕНИЯ | 2011 |
|
RU2475682C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДНОЙ ХАРАКТЕРИСТИКИ ГИДРАВЛИЧЕСКОГО ТРАКТА ПРИ ТУРБУЛЕНТНОМ РЕЖИМЕ ИСТЕЧЕНИЯ | 2018 |
|
RU2680987C1 |
| МОДУЛЬ УПРАВЛЕНИЯ СИГНАЛИЗАЦИЕЙ ДЛЯ НАСОСНОЙ СТАНЦИИ СТОЧНЫХ ВОД | 2019 |
|
RU2763295C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДЕБИТА СКВАЖИН, ОБОРУДОВАННЫХ НАСОСНЫМИ УСТАНОВКАМИ | 2013 |
|
RU2575785C2 |
| МОДУЛЬ МОНИТОРИНГА И СПОСОБ ОПРЕДЕЛЕНИЯ РАБОЧЕГО СЦЕНАРИЯ НА НАСОСНОЙ СТАНЦИИ СТОЧНЫХ ВОД | 2019 |
|
RU2760417C1 |
Группа изобретений относится к системе управления для множества насосов, в частности множества погружных роторных центробежных насосов с регулируемой скоростью. Система (5) управления содержит модуль (7) управления, модуль (9) обработки, интерфейс (11) связи и модуль (13) хранения. Модуль (7) выполнен с возможностью запуска конфигурационного цикла нулевого расхода путем увеличения скорости по меньшей мере одного насоса в дополнение к подмножеству j из i насосов многонасосной системы 3, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос начал оказывать влияние на общий расход, или запуска конфигурационного цикла нулевого расхода путем уменьшения скорости по меньшей мере одного насоса подмножества j из i насосов системы 3, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос прекратил оказывать влияние на общий расход. Группа изобретений обеспечивает систему и способ управления для определения характеристики насоса и/или энергопотребления при нулевом расходе в условиях отсутствия информации о характеристиках насоса, обеспеченной производителем насоса. 3 н. и 26 з.п. ф-лы, 7 ил.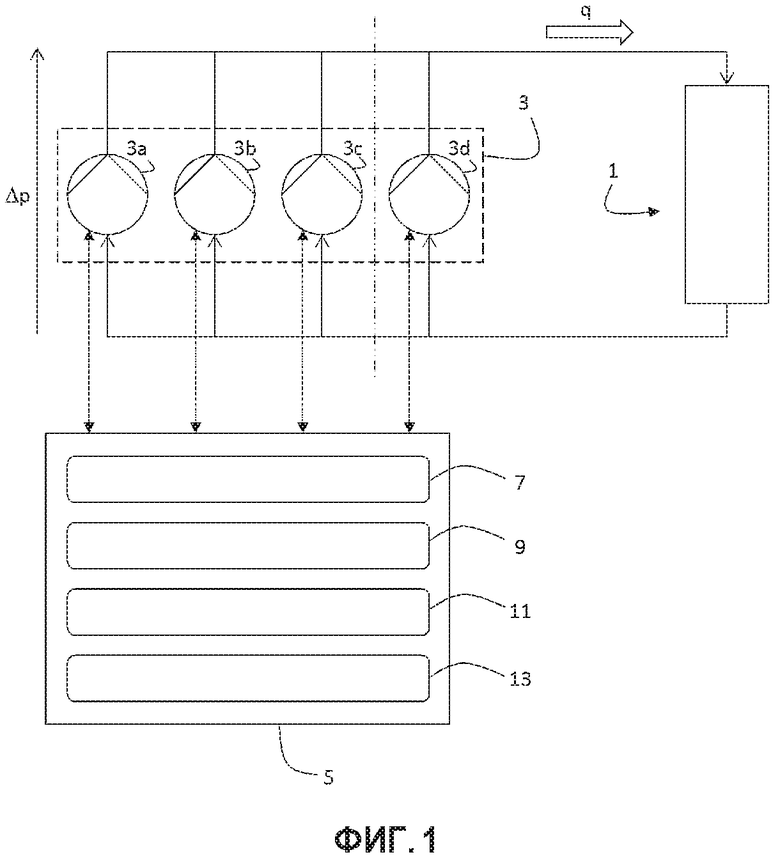
1. Система (5) управления множеством насосов, содержащая:
модуль (7) управления,
модуль (9) обработки,
интерфейс (11) связи и
модуль (13) хранения,
в которой модуль (7) управления выполнен с возможностью:
a) запуска конфигурационного цикла нулевого расхода путем увеличения скорости по меньшей мере одного насоса в дополнение к подмножеству j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос начал оказывать влияние на общий расход, причем модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики 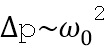 насоса и/или энергопотребления
насоса и/или энергопотребления  , где ω0 - скорость по меньшей мере одного ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход, и/или
, где ω0 - скорость по меньшей мере одного ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход, и/или
b) запуска конфигурационного цикла нулевого расхода путем уменьшения скорости по меньшей мере одного насоса подмножества j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос прекратил оказывать влияние на общий расход, причем модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики насоса и/или энергопотребления , где ω0 - скорость по меньшей мере одного замедляющегося насоса в момент, когда он прекращает оказывать влияние на общий расход.
2. Система по п. 1, в которой модуль (9) обработки выполнен с возможностью определения изменения принимаемого сигнала с использованием алгоритма обнаружения изменений, например, алгоритма кумулятивных сумм (CUSUM).
3. Система по п. 1 или 2, в которой модуль (9) обработки выполнен с возможностью определения изменения принимаемого сигнала путем определения, является ли абсолютное значение градиента напора Δp, скорости ωj и/или энергопотребления P равным или превышающим заданное пороговое значение.
4. Система по любому из пп. 1-3, в которой модуль (7) управления выполнен с возможностью:
a) увеличения скорости k насосов в дополнение к подмножеству j из i насосов многонасосной системы (3), содержащей N насосов и работающей со скоростью ωj, обеспечивая общий напор Δp, где N≥2, 1≤k<N и 1≤i<N, причем модуль (7) управления выполнен с возможностью замедления i насосов подмножества j со скорости ωj до меньшей скорости ωm, где скорость ωm - скорость, необходимая для обеспечения подмножеством m из i+k насосов общего напора Δp; и/или
b) уменьшения скорости k насосов подмножества j из i насосов многонасосной системы (3), содержащей N насосов и работающей со скоростью ωj, обеспечивая общий напор Δp, где N≥2, 1≤k<i и 1<i≤N, причем модуль (7) управления выполнен с возможностью ускорения i-k насосов остаточного подмножества r со скорости ωj до большей скорости ωr, где скорость ωr - скорость, необходимая для обеспечения остаточным подмножеством r из i-k насосов общего напора Δp.
5. Система по п. 4, в которой модуль (7) управления выполнен с возможностью поддержания общего напора Δp постоянным при ускорении/замедлении.
6. Система по п. 4 или 5, в которой модуль (7) управления выполнен с возможностью выполнения ускорения/замедления в соответствии с по меньшей мере одной заданной модельной кривой.
7. Система по любому из пп. 1-6,
в которой модуль (7) управления выполнен с возможностью запуска n разных подмножеств из i насосов многонасосной системы, содержащей N насосов, во время n разных конфигурационных циклов со скоростью ωj, где N≥2, 2≤n≤2N-1 и 1≤i≤N, причем каждый конфигурационный цикл j∈{1,…,n} связан с подмножеством j∈{1,…,n} и скоростью ωj,
в которой интерфейс (11) связи выполнен с возможностью приема сигналов, указывающих рабочие параметры, от каждого подмножества j во время связанного конфигурационного цикла j,
в которой модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики Δp=f(q,ωj) насоса на основе принимаемых сигналов для каждого подмножества j и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q,
в которой модуль (13) хранения выполнен с возможностью хранения аппроксимированной характеристики насоса Δp=f(q,ωj) насоса или указывающих ее параметров.
8. Система по п. 7, в которой модуль (9) обработки выполнен с возможностью определения аппроксимированного энергопотребления P=f(q,ωj) насоса на основе принимаемых сигналов для каждого подмножества j и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q, причем модуль (13) хранения выполнен с возможностью хранения аппроксимированного энергопотребления P=f(q,ωj) насоса или указывающих его параметров.
9. Система по п. 7 или 8, в которой модуль (9) обработки выполнен с возможностью определения подмножества k с минимальным энергопотреблением для требуемой нагрузки на основе аппроксимированного энергопотребления P=f(q,ωj) и/или аппроксимированной характеристики Δp=f(q,ωj) насоса, сохраненных в модуле (13) хранения.
10. Система по п. 9, в которой модуль (7) управления выполнен с возможностью обеспечения работы многонасосной системы (3) с определенным подмножеством k, имеющим минимальное энергопотребление для требуемой нагрузки.
11. Система по любому из пп. 1-10, в которой модуль (7) управления выполнен с возможностью запуска i насосов подмножества j с одинаковой скоростью ωj во время конфигурационного цикла j, причем скорость ωj i насосов подмножества j в конфигурационном цикле j отличается от скорости ωk s насосов подмножества k в другом конфигурационном цикле k, где j≠s, причем общий напор Δp, создаваемый многонасосной системой, является по существу одинаковым для обоих конфигурационных циклов j, k.
12. Система по любому из пп. 1-11, в которой модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики Δp=f(q,ωj) насоса путем определения параметров a, b и c полинома второго порядка  , причем параметр c может быть определен в конфигурационном цикле нулевого расхода из
, причем параметр c может быть определен в конфигурационном цикле нулевого расхода из  .
.
13. Система по любому из пп. 8-12, в которой модуль (9) обработки выполнен с возможностью определения аппроксимированного энергопотребления P=f(q,ωj) путем определения параметров x, y и z полинома второго порядка  , причем параметр z может быть определен в конфигурационном цикле нулевого расхода из
, причем параметр z может быть определен в конфигурационном цикле нулевого расхода из  .
.
14. Система по любому из пп. 12 или 13, в которой модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики Δp=f(q,ωj) насоса и/или энергопотребления P=f(q,ωj) методом наименьших квадратов, если число конфигурационных циклов равно или превышает число определяемых параметров.
15. Способ управления многонасосной системой, содержащий этапы, на которых:
a) запускают (701) конфигурационный цикл нулевого расхода путем увеличения (703a) скорости по меньшей мере одного насоса в дополнение к подмножеству j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос начал оказывать влияние на общий расход, и
определяют (705a) аппроксимированную характеристику  насоса и/или энергопотребление
насоса и/или энергопотребление  , где ω0 - скорость по меньшей мере одного ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход, и/или
, где ω0 - скорость по меньшей мере одного ускоряющегося насоса в момент, когда он начинает оказывать влияние на общий расход, и/или
b) запускают (701) конфигурационный цикл нулевого расхода путем уменьшения (703b) скорости по меньшей мере одного насоса подмножества j из i насосов многонасосной системы, работающей со скоростью ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее, что по меньшей мере один насос прекратил оказывать влияние на общий расход, и
определяют (703b) аппроксимированную характеристику насоса и/или энергопотребление , где ω0 - скорость по меньшей мере одного замедляющегося насоса в момент, когда он прекращает оказывать влияние на общий расход.
16. Способ по п. 15, содержащий этап, на котором определяют изменение принимаемого сигнала с использованием алгоритма обнаружения изменений, например, алгоритма кумулятивных сумм (CUSUM).
17. Способ по п. 15 или 16, содержащий этап, на котором определяют изменение принимаемого сигнала путем определения, является ли абсолютное значение градиента напора Δp, скорости ωj и/или энергопотребления P равным или превышающим заданное пороговое значение.
18. Способ по любому из пп. 15-17, содержащий этапы, на которых:
a) увеличивают (721a) скорость k насосов в дополнение к подмножеству j из i насосов многонасосной системы, содержащей N насосов и работающей со скоростью ωj, обеспечивая общий напор Δp, где N≥2, 1≤k<N и 1≤i<N, и
замедляют (723a) i насосов подмножества j со скорости ωj до меньшей скорости ωm, где скорость ωm - скорость, необходимая для обеспечения подмножеством m из i+k насосов общего напора Δp; и/или
b) уменьшают (721a) скорость k насосов подмножества j из i насосов многонасосной системы, содержащей N насосов и работающей со скоростью ωj, обеспечивая общий напор Δp, где N≥2, 1≤k<i и 1<i≤N, и
ускоряют (723b) i-k насосов остаточного подмножества r со скорости ωj до большей скорости ωr, где скорость ωr - скорость, необходимая для обеспечения остаточным подмножеством r из i-k насосов общего напора Δp.
19. Способ по п. 18, содержащий этап, на котором поддерживают общий напор Δp постоянным при ускорении/замедлении.
20. Способ по п. 18 или 19, в котором ускорение/замедление соответствует по меньшей мере одной заданной модельной кривой.
21. Способ по любому из пп. 15-20, дополнительно содержащий этапы, на которых:
запускают (707) n разных подмножеств из i насосов многонасосной системы, содержащей N насосов, во время n разных конфигурационных циклов со скоростью ωj, где N≥2, 2≤n≤2N-1 и 1≤i≤N, причем каждый конфигурационный цикл j∈{1,…,n} связан с подмножеством j∈{1,…,n} и скоростью ωj,
принимают (709) сигналы, указывающие рабочие параметры, от каждого подмножества j во время связанного конфигурационного цикла j,
определяют (711a) аппроксимированную характеристику Δp=f(q,ωj) насоса на основе принимаемых сигналов для каждого подмножества j и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q,
сохраняют (713) аппроксимированную характеристику Δp=f(q,ωj) насоса или указывающие ее параметры.
22. Способ по п. 21, содержащий этап, на котором определяют (711b) аппроксимированное энергопотребление P=f(q,ωj) насоса на основе принимаемых сигналов для каждого подмножества j и при допущении, что i насосов каждого подмножества j обеспечивают одинаковую долю q/i контрольного расхода q, и сохраняют аппроксимированное энергопотребление P=f(q,ωj) или указывающие его параметры.
23. Способ по п. 21 или 22, содержащий этап, на котором определяют (715) подмножество k с минимальным энергопотреблением для требуемой нагрузки на основе аппроксимированного энергопотребления P=f(q,ωj) и/или аппроксимированной характеристики Δp=f(q,ωj) насоса, сохраненных в модуле (13) хранения.
24. Способ по п. 23, содержащий этап, на котором обеспечивают (717) работу многонасосной системы с определенным подмножеством k, имеющим минимальное энергопотребление для требуемой нагрузки.
25. Способ по любому из пп. 21-24, содержащий этап, на котором запускают i насосов подмножества j с одинаковой скоростью ωj во время конфигурационного цикла j, причем скорость ωj i насосов подмножества j в конфигурационном цикле j отличается от скорости ωk s насосов подмножества k в другом конфигурационном цикле k, где j≠s, причем общий напор Δp, создаваемый многонасосной системой, является по существу одинаковым для обоих конфигурационных циклов j, k.
26. Способ по любому из пп. 21-25, содержащий этап, на котором определяют аппроксимированную характеристику Δp=f(q) насоса путем определения параметров a, b и c полинома второго порядка , причем параметр c определяют в конфигурационном цикле нулевого расхода из .
27. Способ по любому из пп. 22-26, содержащий этап, на котором определяют аппроксимированное энергопотребление P=f(q) путем определения параметров x, y и z полинома второго порядка , причем параметр z определяют в конфигурационном цикле нулевого расхода из .
28. Способ по любому из пп. 15-27, содержащий этап, на котором определяют аппроксимированную характеристику Δp=f(q,ωj) насоса и/или энергопотребление P=f(q,ωj) методом наименьших квадратов, если число конфигурационных циклов равно или превышает число определяемых параметров.
29. Машиночитаемый носитель с командами для выполнения способа по любому из пп. 15-28.
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Плоский свод нагревательного устройства | 1979 |
|
SU905596A1 |
| KR 20090035791 A, 13.04.2009 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДАВЛЕНИЕМ В СЕТИ | 2011 |
|
RU2579424C2 |
| СПОСОБ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ НАСОСНОЙ СТАНЦИИ | 2013 |
|
RU2551139C1 |

