Область техники, к которой относится изобретение
[1] Настоящее раскрытие сущности, в общем, относится к системам управления для множества насосов, в частности, для множества влажных роторных центробежных насосов с регулируемой скоростью. Такое множество насосов может использоваться в насосной станции водопроводной сети.
Уровень техники
[2] Обычно, насосная станция водопроводной сети может содержать множество идентичных или различных насосов, установленных параллельно друг другу, чтобы предоставлять требуемый расход q жидкости и напор Δp (разность давлений). В зависимости от требуемого расхода и напора, имеется множество возможностей для системы управления, чтобы управлять многонасосной системой из N насосов, где N≥2. Многонасосная система может иметь 2N-1 различных вариантов, чтобы обеспечивать работу системы с различными поднаборами насосов. Тем не менее, в зависимости от требуемого расхода и напора, полное потребление мощности не является идентичным для всех поднаборов. Таким образом, чтобы обеспечивать работу многонасосной системы с наименьшим энергопотреблением, многонасосная система управления может хотеть выбирать обеспечение работы системы с поднабором насосов, имеющих наименьшее потребление мощности. Например, если требуется половина полной допустимой нагрузки системы из четырех идентичных насосов, система управления имеет один вариант, чтобы обеспечивать работу всех четырех насосов приблизительно при половине нагрузки, или шесть вариантов, чтобы обеспечивать работу двух насосов приблизительно при полной нагрузке, или 4 варианта для того, чтобы обеспечивать работу трех насосов приблизительно при 2/3 нагрузки. В зависимости от характеристик насоса, один из этих вариантов может представлять собой поднабор с наименьшим потреблением мощности.
[3] Например, в патенте США 7,480,544 B2 описана система энергосберегающих машин для транспортировки жидкости при постоянном давлении, соединенных параллельно для обеспечения подачи системы труб с известными узлами и участками труб.
[4] Заявка на патент США 2003/0235492 A1 относится к способу и устройству для автоматического управления несколькими насосами, работающими параллельно или последовательно.
[5] В заявке на патент США 2015/0148972 A1 описано устройство и способ для управления многоступенчатыми центробежными насосами с определенным числом насосов с наименьшим энергопотреблением.
[6] Все известные системы управления или способы требуют сохраненного заранее знания характеристик насоса, предоставленных посредством изготовителя насосов (см. европейский патент 735273 B1). Тем не менее, вследствие технологических допусков, износа и/или загрязнения, реальные текущие характеристики насоса могут отличаться от сохраненной информации в управляющей логике. Характеристики насоса могут изменяться во времени и могут отличаться между насосами. Таким образом, система управления может считать насосы идентичными, когда фактически их текущие насосные характеристики значительно отличаются. Такая ложная информация приводит к неправильным решениям в отношении того, какой поднабор насосов является наиболее энергосберегающим для обеспечения подачи с требуемым расходом и напором.
[7] В случае если система управления должна внедряться в существующую многонасосную систему, может не быть доступной информации или недостаточно информации относительно насосов в первую очередь. Многонасосная система может содержать различные размеры или виды насосов, причем можно предполагать, что многонасосная система содержит поднаборы по меньшей мере двух насосов, предоставляющих идентичный расход на идентичной скорости. Также следует отметить, что измерение расхода посредством датчиков, в общем, является нежелательным, поскольку установка и техобслуживание датчиков расхода является дорогим. Таким образом, обычно предусмотрено только одно измерение расхода системы, либо измеренное текущее значение расхода вообще не доступно.
[8] Кроме того, включение или выключение насоса в многонасосной системе всегда представляет определенные возмущения в жидкостной сети. Некоторые жидкостные сети являются чувствительными к переходным процессам в расходе или давлении, имеющем высокий градиент, например, охлаждающие схемы. Кроме этого, высокоградиентные переходные процессы в расходе или давлении, в общем, являются более энергоемкими, чем плавные переходные процессы. В силу этого в нормальном режиме работы многонасосной системы требуется минимизировать возмущения, вызываемые посредством включения и выключения насосов.
Сущность изобретения
[9] В отличие от известных многонасосных систем управления, варианты осуществления настоящего раскрытия сущности предоставляют систему управления и способ, чтобы плавно включать или выключать насосы многонасосной системы, чтобы сокращать потребление мощности вследствие системных возмущений посредством включения/выключения насосов.
[10] В соответствии с первым аспектом настоящего раскрытия сущности, предоставляется многонасосная система управления, содержащая модуль управления, модуль обработки, интерфейс связи и модуль хранения данных, при этом модуль управления выполнен с возможностью:
a) постепенного повышения скорости работы k насосов в дополнение к поднабору j из i насосов многонасосной системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<N и 1≤i<N, при этом модуль управления выполнен с возможностью постепенного понижения скорости работы i насосов поднабора j со скорости ωj до более низкой скорости ωm, при этом скорость ωm представляет собой скорость, требуемую для того, чтобы поднабор m из i+k насосов обеспечивал общий напор Δp; и/или
b) постепенного понижения скорости работы k насосов поднабора j из i насосов многонасосной системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<i и 1<i≤N, при этом модуль управления выполнен с возможностью постепенного повышения скорости работы i-k насосов остаточного поднабора r со скорости ωj до более высокой скорости ωr, при этом скорость ωr представляет собой скорость, требуемую для того, чтобы остаточный поднабор r из i-k насосов обеспечивал общий напор Δp.
[11] При необходимости, модуль управления может быть выполнен с возможностью поддержания постоянного общего напора Δp при постепенном повышении/понижении скорости работы. При необходимости, модуль управления может быть выполнен с возможностью постепенного повышения/понижения скорости работы согласно по меньшей мере одной заданной модельной кривой. Параметры a, b c, x, y и z в полиномах  и
и  , при этом параметры служат признаком аппроксимированной характеристики насоса Δp=f(q, ωj) и/или потребления мощности P=f(q, ωj), могут определяться в ходе конфигурационного цикла(ов), как описано ниже, и использоваться для того, чтобы определять заданную модельную кривую. Скорость ω0, определенная в ходе конфигурационного цикла с нулевым расходом может использоваться для того, чтобы координировать постепенное повышение скорости работы (k дополнительных насосов или остаточного поднабора r) и одновременное постепенное понижение скорости работы (работающего поднабора j или k отключенных насосов) таким образом, что комбинированный расход и давление всех работающих насосов в ходе постепенного повышения/понижения скорости работы по существу является постоянным. В силу этого при необходимости реагировать на внезапный переходный процесс в расходе и/или давлении после постепенного повышения/понижения скорости работы, поскольку сведения относительно заданной модельной кривой упрощают недопущение такого внезапного переходного процесса в первую очередь и устанавливать требуемую скорость, расход и давление в конце постепенного повышения/понижения скорости работы.
, при этом параметры служат признаком аппроксимированной характеристики насоса Δp=f(q, ωj) и/или потребления мощности P=f(q, ωj), могут определяться в ходе конфигурационного цикла(ов), как описано ниже, и использоваться для того, чтобы определять заданную модельную кривую. Скорость ω0, определенная в ходе конфигурационного цикла с нулевым расходом может использоваться для того, чтобы координировать постепенное повышение скорости работы (k дополнительных насосов или остаточного поднабора r) и одновременное постепенное понижение скорости работы (работающего поднабора j или k отключенных насосов) таким образом, что комбинированный расход и давление всех работающих насосов в ходе постепенного повышения/понижения скорости работы по существу является постоянным. В силу этого при необходимости реагировать на внезапный переходный процесс в расходе и/или давлении после постепенного повышения/понижения скорости работы, поскольку сведения относительно заданной модельной кривой упрощают недопущение такого внезапного переходного процесса в первую очередь и устанавливать требуемую скорость, расход и давление в конце постепенного повышения/понижения скорости работы.
[12] Аппроксимация характеристики насоса и/или потребления мощности посредством полинома второго порядка является наилучшей вокруг рабочих точек с наибольшей эффективностью, поскольку характеристика насоса Δp=f(q, ωj) и потребление мощности P=f(q, ωj) предположительно могут быть достаточно плавными вокруг этих предпочтительных рабочих точек. Тем не менее, аппроксимация может быть менее точной для рабочих точек еще дальше от точек с наибольшей эффективностью, в частности, для работы в режиме нулевого расхода. Тем не менее, хорошая аппроксимация работы в режиме нулевого расхода является полезной по нескольким причинам. Во-первых, аппроксимации характеристики насоса Δp=f(q, ωj) и/или потребления мощности P=f(q, ωj) является более надежной и более точной, если известны точки Δp=f(0, ω)≈cω02 и/или P=f(0, ω)≈zω03. Во-вторых, как описано ниже, может определяться скорость ω0, при которой запуск насоса в дополнение к работающему поднабору участвует в полном расходе. В-третьих, знание параметров c и z является полезным для многонасосной системы из двух идентичных насосов, т.е. N=2, поскольку предусмотрено только два варианта работающих поднаборов с различным числом i насосов, т.е. j=1 (01 или 10) с i=1 и j=2 (11) с i=2.
[13] Следовательно, чтобы определять хорошую аппроксимацию работы в режиме нулевого расхода, модуль управления может быть выполнен с возможностью:
a) обеспечения работы конфигурационного цикла с нулевым расходом посредством постепенного повышения скорости работы по меньшей мере одного насоса в дополнение к поднабору j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее по меньшей мере один насос, начинающий участвовать в полном расходе, и при этом модуль обработки выполнен с возможностью определения аппроксимированной характеристики  насоса и/или потребления
насоса и/или потребления  мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе; и/или
мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе; и/или
b) обеспечения работы конфигурационного цикла с нулевым расходом посредством постепенного понижения скорости работы по меньшей мере одного насоса поднабора j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее по меньшей мере один насос, прекращающий участвовать в полном расходе, и при этом модуль обработки выполнен с возможностью определения аппроксимированной характеристики насоса и/или потребления мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного понижения скорости работы в момент, в который он прекращает участвовать в полном расходе.
[14] При необходимости, давление поддерживается по существу постоянным в ходе постепенного повышения/понижения скорости работы по меньшей мере одного насоса. В варианте a), т.е. когда скорость работы по меньшей мере одного насоса постепенно повышается в дополнение к уже работающему поднабору j, поднабор j может предоставлять по существу постоянное давление, и насос после постепенного повышения скорости работы не участвует в расходе до тех пор, пока не будет достигнута скорость ω0, которая является достаточной только для того, чтобы предоставлять это постоянное давление. Аналогично, в варианте b), т.е. когда скорость работы по меньшей мере одного насоса из работающего поднабора j постепенно понижается, поднабор j может предоставлять по существу постоянное давление, и насос после постепенного понижения скорости работы по-прежнему участвует в расходе до тех пор, пока его скорость не опустится ниже скорости ω0, которая по меньшей мере необходима для того, чтобы предоставлять это постоянное давление. В обоих случаях, это вызывает внезапное изменение сигнала, которое может показываться в качестве пика или резкого падения на схеме, на которой скорость, давление или потребление мощности записывается за время постепенного изменения скорости работы.
[15] При необходимости, модуль обработки может быть выполнен с возможностью идентифицирования принимаемого изменения сигнала посредством использования алгоритма обнаружения изменения, например, алгоритма кумулятивных сумм (CUSUM). При необходимости, модуль обработки может быть выполнен с возможностью идентифицирования принимаемого изменения сигнала посредством определения того, равно или превышает либо нет абсолютное значение градиента в напоре Δp, скорости ωj и/или потреблении P мощности заданное пороговое значение.
[16] Таким образом, параметры c и z, а также скорость ω0 могут определяться посредством проведения одного или более конфигурационных циклов с нулевым расходом.
[17] При необходимости, модуль управления может быть дополнительно выполнен с возможностью обеспечения работы n различных поднаборов i насосов многонасосной системы, содержащей N насосов, в течение n различных конфигурационных циклов на скорости ωj, где N≥2, 2≤n≤2N-1, и 1≤i≤N, при этом каждый конфигурационный цикл j∈{1,..., n} ассоциирован с поднабором j∈{1,..., n} и скоростью ωj. Интерфейс связи может быть выполнен с возможностью приема сигналов, указывающих рабочие параметры, из каждого поднабора j в ходе ассоциированного конфигурационного цикла j. Модуль обработки может быть выполнен с возможностью определения аппроксимированной характеристики насоса Δp=f(q, ωj) на основе принимаемых сигналов для каждого поднабора j и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q. Модуль хранения данных может быть выполнен с возможностью сохранения аппроксимированной характеристики насоса Δp=f(q, ωj) или параметры, указывающие ее.
[18] Следует отметить, что j используется в данном документе в качестве индекса, чтобы отличать различные поднаборы и конфигурационные циклы друг от друга. Число насосов поднабора j задается посредством i. Число конфигурационных циклов задается посредством n. По мере того, как поднабор j изменяется между конфигурационными циклами, идентичный индекс j может использоваться для того, чтобы идентифицировать поднабор и конфигурационный цикл. Следующая таблица может иллюстрировать это посредством примера системы из трех насосов идентичного типа и размера. Состояние всех насосов может быть проиллюстрировано посредством двоичного числа с N битов, где каждый бит представляет насос, т.е. 0 означает "деактивирован", 1 означает "активирован", и двоичный весовой коэффициент представляет число i насосов в работающем поднаборе j:
0 - "деактивирован", 1 - "активирован"
Число n конфигурационных циклов зависит от того, как точно должна аппроксимироваться характеристика насоса Δp=f(q, ωj). В примере вышеприведенной таблицы, предусмотрено три варианта для того, чтобы обеспечивать работу первого (j=1) конфигурационного цикла с одним (i=1) работающим насосом. Предусмотрено также три варианта для того, чтобы обеспечивать работу второго (j=2) конфигурационного цикла с двумя (i=2) работающими насосами. Предпочтительно, число i работающих насосов может отличаться между конфигурационными циклами. В частности, если можно предполагать, что все насосы имеют идентичную, но неизвестную характеристику насоса, следующий полином второго порядка может использоваться в качестве аппроксимации:
 ,
,
где a, b и c представляют собой параметры, указывающие характеристику насоса. Опорный расход q может быть измеренным или нормализованным значением, т.е. он может произвольно задаваться в q=1. Скорость ωj представляет собой рабочий параметр, принимаемый посредством интерфейса связи из каждого поднабора j в ходе ассоциированного конфигурационного цикла j. Напор Δpj может измеряться посредством датчика давления и приниматься посредством интерфейса связи в качестве рабочего параметра в ходе ассоциированного конфигурационного цикла j. Альтернативно или помимо этого, скорость ωj может задаваться таким образом, чтобы достигать определенного напора Δpj и поддерживать напор Δpj=Δp постоянным для всех n конфигурационных циклов. В силу этого, конфигурационные циклы обеспечивают возможность аппроксимации текущей характеристики насоса для определения того, какой поднабор насосов является наиболее энергосберегающим, чтобы предоставлять требуемый расход q и напор Δp.
[19] При необходимости, модуль обработки может быть выполнен с возможностью определения аппроксимированного потребления мощности насосов P=f(q, ωj) на основе принимаемых сигналов для каждого поднабора j и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q, при этом модуль хранения данных может быть выполнен с возможностью сохранения аппроксимированного потребления мощности P=f(q, ωj) или параметры, указывающие ее. Аналогично характеристике насоса Δp=f(q, ωj), в частности, если можно предполагать, что все насосы поднабора имеют идентичное, но неизвестное потребление мощности, следующий полином второго порядка может использоваться в качестве аппроксимации:
 ,
,
где x, y и z представляют собой параметры, указывающие потребление мощности. Таким образом, аппроксимированное потребление мощности может использоваться в качестве альтернативы или в дополнение к аппроксимированной характеристике насоса для определения того, какой поднабор насосов является наиболее энергосберегающим, чтобы предоставлять требуемый расход или напор.
[20] Таким образом, при необходимости, модуль обработки может быть выполнен с возможностью определения поднабора k с наименьшим потреблением мощности для требуемой нагрузки на основе аппроксимированного потребления мощности P=f(q, ωj) и/или аппроксимированной характеристики насоса Δp=f(q, ωj), сохраненной в модуле хранения данных. Следовательно, модуль управления может быть выполнен с возможностью управления многонасосной системой с определенным поднабором k, имеющим наименьшее потребление мощности для требуемой нагрузки.
[21] При необходимости, модуль управления может быть выполнен с возможностью обеспечения работы i насосов поднабора j на идентичной скорости ωj в ходе конфигурационного цикла j, при этом скорость ωj i насосов поднабора j в конфигурационном цикле j отличается от скорости ωk s насосов поднабора k в другом конфигурационном цикле k, где j≠s, при этом общий напор Δp, сформированный посредством многонасосной системы, является, по существу, идентичным для обоих конфигурационных циклов j, k. Другими словами, скорости ωj и ωk могут задаваться с возможностью достигать определенного постоянного напора Δpj=Δpk=Δp для всех n конфигурационных циклов.
[22] При необходимости, модуль обработки может быть выполнен с возможностью определения аппроксимированной характеристики насоса Δp=f(q, ωj) и/или потребления мощности P=f(q, ωj) посредством метода наименьших квадратов, если число n конфигурационных циклов равно или превышает число параметров, которые должны определяться. Таким образом, если набор параметров переопределяется, "усредненные" параметры могут находиться посредством полиномиального регрессионного анализа или аналогичной статистической технологии, чтобы использовать избыточную информацию из конфигурационных циклов. В силу этого, износ, загрязнение, другие формы ухудшения эффективности или различий между насосами вследствие технологических допусков могут сглаживаться и в силу этого учитываться. Кроме того, резко отклоняющиеся значения могут определяться в ходе избыточных конфигурационных циклов, чтобы игнорировать их в усреднении и/или идентифицировать и блокировать низкоэффективные насосы многонасосной системы. Такие идентифицированные низкоэффективные насосы могут указываться для обслуживания, ремонта или замены.
[23] В соответствии со вторым аспектом настоящего раскрытия сущности, предоставляется способ для управления многонасосной системой, содержащий:
a) - постепенное повышение скорости работы k насосов в дополнение к поднабору j из i насосов многонасосной системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<N и 1≤i<N, и
- постепенное понижение скорости работы i насосов поднабора j со скорости ωj до более низкой скорости ωm, при этом скорость ωm представляет собой скорость, требуемую для того, чтобы поднабор m из i+k насосов обеспечивал общий напор Δp; и/или
b) - постепенное понижение скорости работы k насосов поднабора j из i насосов многонасосной системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<i и 1<i≤N, и
- постепенное повышение скорости работы i-k насосов остаточного поднабора r со скорости ωj до более высокой скорости ωr, при этом скорость ωr представляет собой скорость, требуемую для того, чтобы остаточный поднабор r из i-k насосов обеспечивал общий напор Δp.
[24] При необходимости, способ может содержать поддержание постоянным общего напора Δp при постепенном повышении/понижении скорости работы. При необходимости, постепенное повышение/понижение скорости работы соответствует по меньшей мере одной заданной модельной кривой.
[25] Например, в варианте a), напор может быть параметризован для поднабора j с работающими насосами i до того, как k насосов достигают скорости ωm, следующим образом:
 , при этом qj представляет собой расход, предоставленный посредством поднабора j до того, как k дополнительных насосов участвуют в расходе. Перепад давлений, предоставленный посредством k дополнительных насосов, может быть параметризован в качестве
, при этом qj представляет собой расход, предоставленный посредством поднабора j до того, как k дополнительных насосов участвуют в расходе. Перепад давлений, предоставленный посредством k дополнительных насосов, может быть параметризован в качестве  , при этом qk представляет собой расход, предоставленный посредством k дополнительных насосов до того, как они участвуют в расходе. Наиболее вероятно, что только один насос должен добавляться в поднабор j, так что k=1, и
, при этом qk представляет собой расход, предоставленный посредством k дополнительных насосов до того, как они участвуют в расходе. Наиболее вероятно, что только один насос должен добавляться в поднабор j, так что k=1, и  . После постепенного повышения скорости работы, поднабор j предположительно должен предоставлять
. После постепенного повышения скорости работы, поднабор j предположительно должен предоставлять  полного расхода q, тогда как дополнительный насос предположительно должен предоставлять
полного расхода q, тогда как дополнительный насос предположительно должен предоставлять  полного расхода q. Тем не менее, до того, как дополнительный насос достигает скорости ωm, поднабор j предположительно должен предоставлять весь полный расход q, тогда как дополнительный насос предположительно не должен предоставлять ни один из полного расхода q. Это может отображаться следующим образом:
полного расхода q. Тем не менее, до того, как дополнительный насос достигает скорости ωm, поднабор j предположительно должен предоставлять весь полный расход q, тогда как дополнительный насос предположительно не должен предоставлять ни один из полного расхода q. Это может отображаться следующим образом:




- при этом qjs является долей расхода поднабора j в начале постепенного повышения скорости работы, qje является долей расхода поднабора j в конце постепенного повышения скорости работы, q1s является долей расхода дополнительного насоса в начале постепенного повышения скорости работы, и q1e является долей расхода дополнительного насоса в конце постепенного повышения скорости работы. Скорость изменения между qjs и qje может задаваться равной идентичной скорости изменения в качестве скорости изменения между q1s и q1e посредством следующих условий:

 ,
,
- при этом параметр α постепенного изменения скорости работы варьируется от 0 в начале постепенного повышения скорости работы до 1 в конце постепенного повышения скорости работы. Комбинированный полный расход q всегда является суммой qj и q1 и в силу этого постоянным в ходе постепенного повышения скорости работы для всех значений α. Также общий напор Δp является постоянным в ходе постепенного повышения скорости работы для всех значений α. Соответствующие скорости ωj и ω1 могут определяться следующим образом:

- при этом обе конечных скорости ωje и ω1e являются идентичными и равными ωm в конце постепенного повышения скорости работы, т.е. когда α=1, при этом поднабор m с i+1 насосов работает после постепенного повышения скорости работы. Вышеприведенный пример аналогично является допустимым для варианта b), в котором скорость работы одного или более насосов поднабора j постепенно понижается.
[26] При необходимости, способ дополнительно может содержать:
a) - выполнение конфигурационного цикла с нулевым расходом посредством постепенного повышения скорости работы по меньшей мере одного насоса в дополнение к поднабору j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее по меньшей мере один насос, начинающий участвовать в полном расходе, и
- определение аппроксимированной характеристики  насоса и/или потребления
насоса и/или потребления  мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе; и/или
мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе; и/или
b) - выполнение конфигурационного цикла с нулевым расходом посредством постепенного понижения скорости работы по меньшей мере одного насоса поднабора j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее по меньшей мере один насос, прекращающий участвовать в полном расходе, и
- определение аппроксимированной характеристики насоса и/или потребления мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного понижения скорости работы в момент, в который он прекращает участвовать в полном расходе.
[27] При необходимости, общий напор и/или расход могут поддерживаться по существу постоянными в ходе постепенного повышения/понижения скорости работы по меньшей мере одного насоса. В варианте a), т.е. когда скорость работы по меньшей мере одного насоса постепенно повышается в дополнение к уже работающему поднабору j, поднабор j может предоставлять по существу постоянное давление, и насос после постепенного повышения скорости работы не участвует в расходе до тех пор, пока не будет достигнута скорость ω0, которая является достаточной только для того, чтобы предоставлять это постоянное давление. Аналогично, в варианте b), т.е. когда скорость работы по меньшей мере одного насоса из работающего поднабора j постепенно понижается, поднабор j может предоставлять по существу постоянное давление, и насос после постепенного понижения скорости работы по-прежнему участвует в расходе до тех пор, пока его скорость не опустится ниже скорости ω0, которая по меньшей мере необходима для того, чтобы предоставлять это постоянное давление. В обоих случаях, это вызывает внезапное изменение сигнала, которое может показываться в качестве пика или резкого падения на схеме, на которой скорость, давление или потребление мощности записывается за время постепенного изменения скорости работы.
[28] При необходимости, принимаемое изменение сигнала может идентифицироваться посредством определения того, равно или превышает либо нет абсолютное значение градиента в напоре Δp, скорости ωj и/или потреблении P мощности заданное пороговое значение. При необходимости, алгоритм обнаружения изменения, например, алгоритм кумулятивных сумм (CUSUM), используется для идентификации принимаемого изменения сигнала.
[29] CUSUM-алгоритм является, в частности, полезным для обнаружения изменений среднего значения сигнала. Например, с учетом блок-схемы последовательности сигналов во времени, на которой скорость, давление или потребление мощности представляют собой сигнал, положительные и отрицательные разности сигналов относительно среднего значения могут суммироваться вплоть до отслеживаемого количества. Если отслеживаемое количество равно или превышает определенное пороговое значение, среднее значение может интерпретироваться как изменяющееся. Для разрешения некоторого шума при передаче сигналов без превышения порогового значении посредством шума, постоянная величина может вычитаться/складываться из отслеживаемого количества для каждой выборки. CUSUM-логика для каждого сигнала может описываться посредством следующих уравнений:
 ,
,
при этом Jω является отслеживаемым количеством для скорости ω, и JΔp является отслеживаемым количеством для напора Δp. Сигналы здесь являются нормализованными, а также постоянными величинами γω и γΔp. Разность знака между Jω и JΔp обусловлена тем фактом, что скорость ω предположительно должна внезапно снижаться, когда насос после постепенного повышения скорости работы начнет участвовать в расходе q, тогда как напор Δp предположительно должен внезапно увеличиваться посредством этих возмущений. Пороговые значения βω и βΔp могут задаваться с возможностью проверять то, удовлетворяется или нет любое из Jω<-βω и/или JΔp>βΔp, и когда это имеет место, использовать текущие значения ω и Δp, чтобы решать следующие уравнения для определения параметра c:
Определение параметра z может аналогично быть основано на полиномиальной аппроксимации второго порядка потребления мощности.
[30] При необходимости, способ дополнительно может содержать:
- обеспечение работы n различных поднаборов i насосов многонасосной системы, содержащей N насосов, в течение n различных конфигурационных циклов на скорости ωj, где N≥2, 2≤n≤2N-1, и 1≤i≤N, при этом каждый конфигурационный цикл j∈{1,..., n} ассоциирован с поднабором j∈{1,..., n} и скоростью ωj,
- прием сигналов, указывающих рабочие параметры из каждого поднабора j в ходе ассоциированного конфигурационного цикла j,
- определение аппроксимированной характеристики насоса Δp=f(q, ωj) на основе принимаемых сигналов для каждого поднабора j и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q,
- сохранение аппроксимированной характеристики насоса Δp=f(q, ωj) или параметров, указывающих ее.
[31] При необходимости, способ может содержать определение аппроксимированного потребления мощности насосов P=f(q, ωj) на основе принимаемых сигналов для каждого поднабора j и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q, и сохранение аппроксимированного потребления мощности P=f(q, ωj) или параметров, указывающих ее.
[32] При необходимости, способ может содержать определение поднабора k с наименьшим потреблением мощности для требуемой нагрузки на основе аппроксимированного потребления мощности P=f(q, ωj) и/или аппроксимированной характеристики насоса Δp=f(q, ωj), сохраненной в модуле хранения данных. При необходимости, способ может содержать управление многонасосной системой с определенным поднабором k, имеющим наименьшее потребление мощности для требуемой нагрузки.
[33] Например, как только аппроксимированная характеристика насоса Δp=f(q, ωj) определяется, она может использоваться для того, чтобы определять наиболее энергосберегающее число насосов для управления многонасосной системой. Это может даже быть независимым от требуемой нагрузки, т.е. требуемого расхода и давления. Расход может в принципе определяться либо из аппроксимированной характеристики насоса Δp=f(q, ωj), либо из аппроксимированного потребления мощности P=f(q, ωj), тем не менее, каждое из означенного может давать в результате два решения вследствие квадратичных членов, если полином второго порядка используется в качестве аппроксимации. В силу этого предпочтительно использовать комбинацию Δp=f(q, ωj) и P=f(q, ωj), так что квадратичные члены взаимно сокращаются, и оставлять только одно решение. Это показано в уравнениях:
[34] Поскольку все поднаборы j с числом i насосов могут считаться эквивалентными друг другу, скорость ωj обозначается здесь в качестве ωi, т.е. скорость любого поднабора j с i насосов. Расход q в последнем уравнении потенциально может быть не определен, если xb=ay, что означает то, что Δp=f(q, ωi) и P=f(q, ωi) имеют максимум при идентичном расходе q. Это, в общем, не имеет место, поскольку потребление мощности имеет тенденцию иметь максимум при высоких расходах, тогда как напор Δp обычно является максимальным при низких расходах. Как только q определяется посредством вышеприведенного уравнения, может вычисляться то, является или нет более энергосберегающим обеспечение работы многонасосной системы с большим или меньшим на один числом насосов. Чтобы выполнять это сравнение, результирующая скорость может определяться для обоих случаев посредством следующего:
 ,
,
[35] Что может иметь два решения, из которых одно может исключаться, так что:
Чтобы получать ожидаемую скорость ωi+1, т.е. скорость любого поднабора j с i+1 насосов, и ожидаемую скорость ωi-1, т.е. скорость любого поднабора j с i-1 насосов, параметр i заменяется посредством i+1 и i-1, соответственно, в вышеприведенном уравнении.
[36] После определения ожидаемых скоростей ωi+1 and ωi-1, может вычисляться соответствующее потребление мощности P=f(q, ωi). В таком случае можно определять то, какой из следующих вариантов потребляет наименьшее количество мощности: 1. продолжение работы с i насосов поднабора j как есть, 2. добавление еще одного насоса в поднабор j или 3. отключение одного насоса поднабора j. Логика решения для нахождения оптимального числа i из работающих насосов может быть получена в итоге следующим образом:

В данном документе, P (q, i, ωi) может представлять собой текущее потребление мощности работающего поднабора j из i насосов, так что оно может приниматься как текущее измеренное значение, тогда как прогнозированные значения P (q, i-1, ωi-1) и P (q, i+1, ωi+1) могут определяться из аппроксимированного потребления мощности P=f(q, ωi).
[37] Вышеуказанное определение того, является или нет более энергосберегающей работа с большим или меньшим на один числом насосов, чем с текущим числом работающих насосов, является простым примером для использования аппроксимированных характеристик насоса и аппроксимированного потребления мощности, чтобы обеспечивать работу многонасосной системы в более энергосберегающим режиме. Тем не менее, конфигурационные циклы также обеспечивают возможность записи наборов параметров для любого поднабора j, так что можно определять точный поднабор насосов, который потребляет наименьшее количество мощности для требуемой нагрузки. Например, один из четырех вариантов работы поднабора трех из четырех насосов может демонстрировать потребление меньшей мощности, чем другие три варианта. Следовательно, может определяться не только оптимальное число работающих насосов, но также и то, какой точный поднабор следует выбирать для него. Тем не менее, это может изменяться во времени и в ходе эксплуатации вследствие износа. Чтобы учитывать такие изменения, регулярное выполнение конфигурационных циклов обеспечивает возможность обновления аппроксимированных характеристик насоса и/или аппроксимированного потребления мощности.
[38] При необходимости, вышеприведенный алгоритм может содержать два критерия ограничения, один из которых не допускает превышение максимальной мощности насоса, и другой предотвращает нарушение минимального расхода. В отношении первого ограничения, некоторые насосы могут быть оснащены частотно-регулируемым приводом (VFD), который не может приводить в действие насос на полной скорости при всех условиях без нарушения максимальной мощности VFD. Если вышеприведенный алгоритм находит, что поднабор i-1 насосов потребляет меньше мощности, оставшиеся i-1 насосов не должны превышать максимальную мощность VFD, которая не иногда известна заранее. В случае если максимальная мощность VFD не известна, можно определять в одном или более конфигурационных циклов посредством записи потребления мощности первый раз, когда фактическая скорость насоса не соответствует заданной скоростью, поскольку достигнута максимальная мощность VFD. Алгоритм выбора решения в силу этого может учитывать записанную максимальную мощность посредством отсутствия постепенного понижения скорости работы насоса, если остаточный поднабор i-1 насосов превышает максимальную мощность в расчете на насос.
[39] Относительно второго ограничения, жидкость в некоторых насосах, в частности, в многоступенчатых центробежных насосах, т.е. в так называемых CR-насосах, не должна становиться слишком горячей, и в силу этого минимальный расход требуется. Тем не менее, расход может быть неизвестной величиной в произвольных единицах в вышеуказанном процессе и может урезаться наполовину в расчете на насос, если насос добавляется в работающий поднабор из одного насоса, или уменьшаться на треть в расчете на насос, если насос добавляется в работающий поднабор из двух насосов. Следовательно, нельзя гарантировать то, что достаточный расход доступен для каждого насоса. Тем не менее, расход может быть "калиброван" в единицах м³/с посредством его умеренной оценки, т.е. может оцениваться минимальный расход, который находится ниже реального расхода. Это может осуществляться посредством справедливого допущения, что эффективность выше 50% при максимуме потребления мощности. При максимуме потребления мощности, нормализованный расход может быть выведен из параметров следующим образом:
Этот расход может подаваться в уравнения для Δp и P, при этом эффективность e предположительно умеренно составляет 50%, и коэффициент α масштабирования вводится следующим образом:
 ,
,
что дает в результате следующие условия калибровки:

При этих условиях, если эффективность составляет 50% в точке максимальной мощности, аппроксимированный расход должен предоставляться в единицах м³/с. Если реальная эффективность является более высокой, реальный расход также является более высоким. В случае если точка максимальной мощности нарушает максимальную мощность VFD, может использоваться максимальная мощность VFD, что дает в результате два решения для расхода, более низкое решение из которых может умеренно выбираться для подачи в уравнения для Δp и P, как описано выше. В силу этого, алгоритм может обеспечивать то, что всегда достаточный расход доступен в расчете на насос.
[40] При необходимости, способ может содержать обеспечение работы i насосов поднабора j на идентичной скорости ωj в ходе конфигурационного цикла j, при этом скорость ωj i насосов поднабора j в конфигурационном цикле j отличается от скорости ωk s насосов поднабора k в другом конфигурационном цикле k, где j≠s, при этом общий напор Δp, сформированный посредством многонасосной системы, является, по существу, идентичным для обоих конфигурационных циклов j, k.
[41] При необходимости, способ может содержать определение аппроксимированной характеристики насоса Δp=f(q, ωj) посредством определения параметров a, b и c полинома второго порядка  , при этом ωj представляет собой скорость i насосов поднабора j. Альтернативно или помимо этого, способ может содержать определение аппроксимированного потребления мощности P=f(q, ωj) посредством определения параметров x, y и z полинома второго порядка
, при этом ωj представляет собой скорость i насосов поднабора j. Альтернативно или помимо этого, способ может содержать определение аппроксимированного потребления мощности P=f(q, ωj) посредством определения параметров x, y и z полинома второго порядка  , при этом ωj представляет собой скорость i насосов поднабора j.
, при этом ωj представляет собой скорость i насосов поднабора j.
[42] При необходимости, способ может содержать определение аппроксимированной характеристики насоса Δp=f(q, ωj) и/или потребления мощности P=f(q, ωj) посредством метода наименьших квадратов, если число конфигурационных циклов равно или превышает число параметров, которые должны определяться. Таким образом, если набор параметров переопределяется, "усредненные" параметры могут находиться посредством полиномиального регрессионного анализа или аналогичной статистической технологии, чтобы использовать избыточную информацию из конфигурационных циклов. В силу этого, износ, загрязнение, другие формы ухудшения эффективности или различий между насосами вследствие технологических допусков могут сглаживаться и в силу этого учитываться. Кроме того, резко отклоняющиеся значения могут определяться в ходе избыточных конфигурационных циклов, чтобы игнорировать их в усреднении и/или идентифицировать и блокировать низкоэффективные насосы многонасосной системы. Такие идентифицированные низкоэффективные насосы могут указываться для обслуживания, ремонта или замены.
[43] Способ, описанный выше, может реализовываться в форме компилированного или некомпилированного программного кода, который сохраняется на машиночитаемом носителе с инструкциями для осуществления способа. Альтернативно или помимо этого, способ может осуществляться посредством программного обеспечения в облачной системе, т.е. один или более модулей системы средств управления, в частности, модуль обработки, могут реализовываться в облачной системе.
Краткое описание чертежей
[44] Далее описываются варианты осуществления настоящего раскрытия сущности в качестве примера со ссылкой на следующие чертежи, на которых:
Фиг. 1 показывает сеть подачи жидкости, снабжаемую посредством многонасосной системы, управляемой посредством примера многонасосной системы управления согласно настоящему раскрытию сущности;
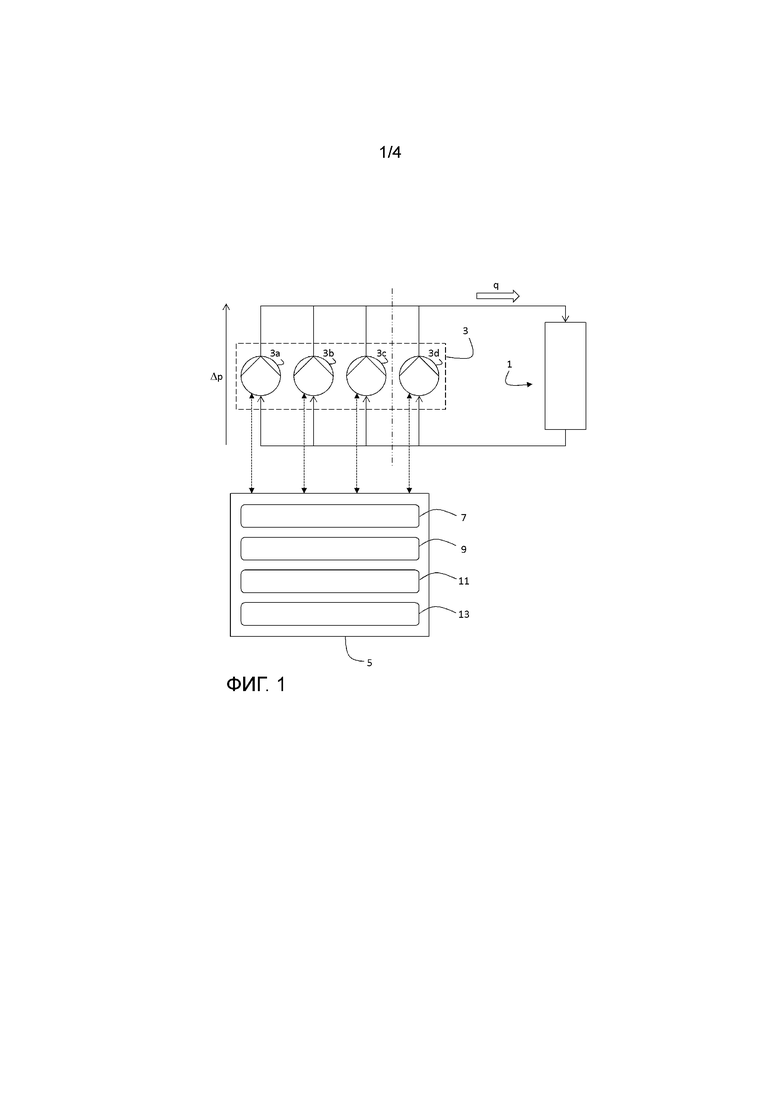
Фиг. 2 показывает схему аппроксимированной характеристики насоса;
Фиг. 3 показывает схему аппроксимированного потребления мощности;
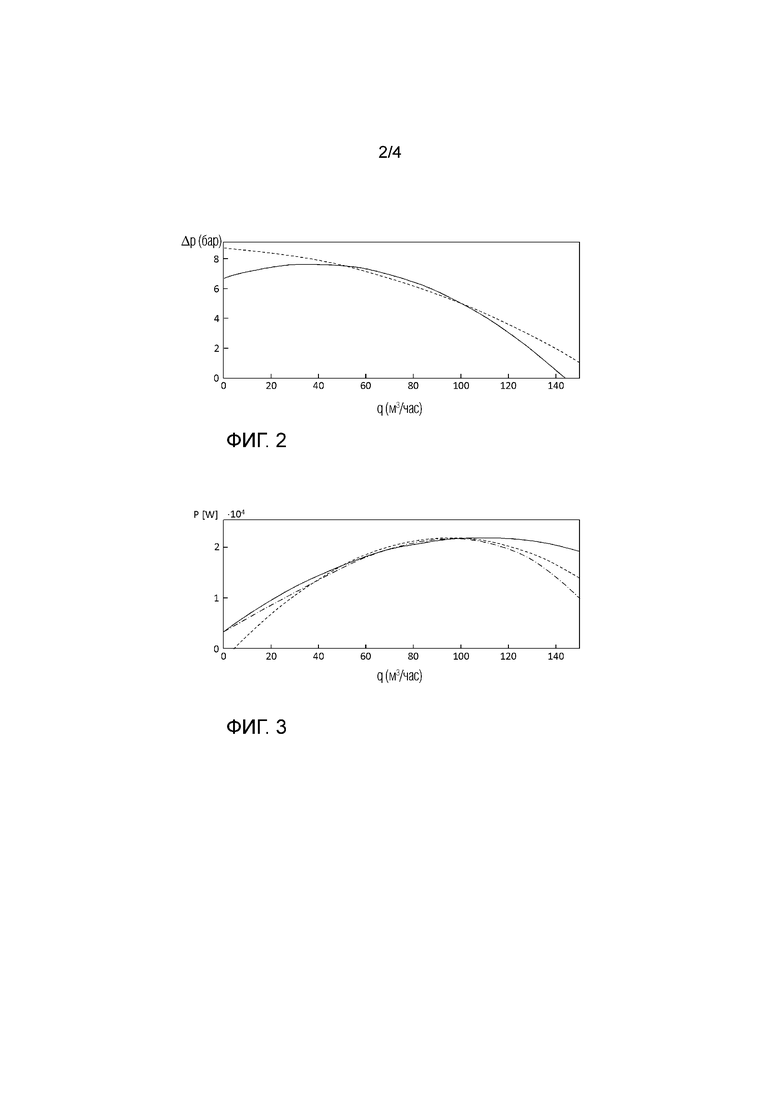
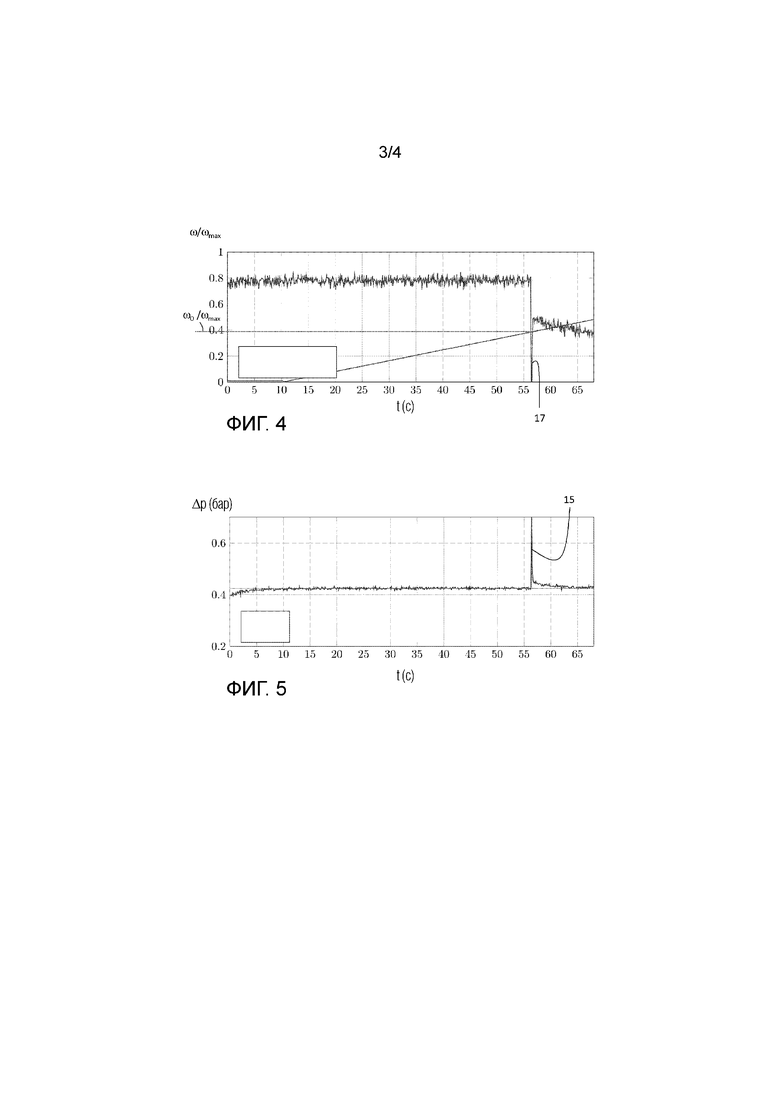
Фиг. 4 показывает схему скорости работы насоса в ходе постепенного повышения скорости работы дополнительного насоса, когда уже работает поднабор насосов;
Фиг. 5 показывает схему общего напора в ходе постепенного повышения скорости работы дополнительного насоса, когда поднабор насосов уже работает;
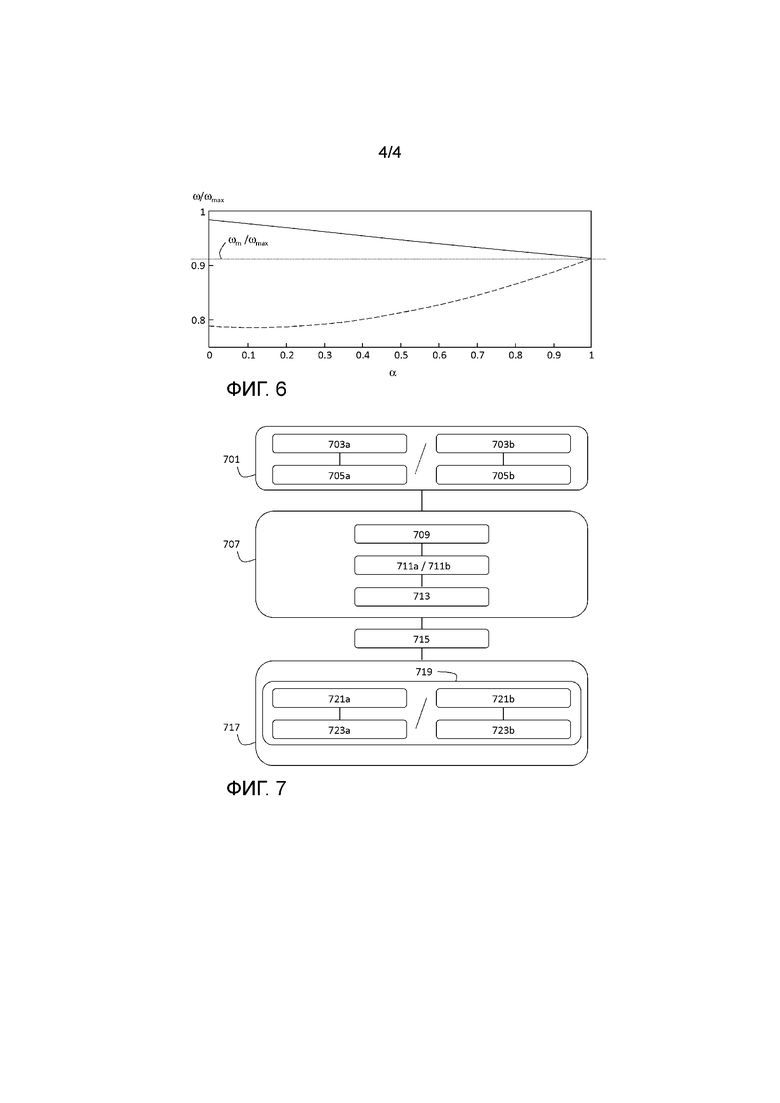
Фиг. 6 уже показывает схему скорости в ходе оптимизированного постепенного повышения скорости работы дополнительного насоса и постепенного понижения скорости работы уже работающего поднабора насосов; и
Фиг. 7 показывает схематичный расход примера способа согласно настоящему раскрытию сущности.
Подробное описание изобретения
[45] Фиг. 1 показывает жидкостную сеть 1, снабжаемую посредством многонасосной системы 3 из четырех насосов 3a, 3b, 3c, 3d. Жидкостная сеть 1, например, может иметь цикл нагрева или охлаждения. Жидкостная сеть 1 не обязательно должна иметь цикл с замкнутым контуром. Она может содержать два бачка, при этом многонасосная система 3 устанавливается, чтобы прокачивать жидкость, например, воду из одного бачка в другой. В этом примере, насосы 3a, 3b, 3c, 3d многонасосной системы 3 устанавливаются параллельно. Насосы 3a, 3b, 3c, 3d этого примера также имеют номинально идентичный тип и размер.
[46] Многонасосная система 5 управления, содержащая модуль 7 управления, модуль 9 обработки, интерфейс 11 связи и модуль 13 хранения данных, находится в прямом или непрямом соединении беспроводной или проводной связи с насосами 3a, 3b, 3c, 3d. Интерфейс 11 связи выполнен с возможностью отправлять сигналы и принимать сигналы из насосов 3a, 3b, 3c, 3d. Модуль 9 обработки выполнен с возможностью обрабатывать принимаемые сигналы и выполнять вычисления на основе принимаемых сигналов. Модуль 13 хранения данных выполнен с возможностью сохранять результаты вычислений. Модуль 7 управления выполнен с возможностью управлять работой насоса на основе сохраненных результатов посредством команд через интерфейс 11 связи в насосы 3a, 3b, 3c, 3d. Следует отметить, что модуль 7 управления, модуль 9 обработки, интерфейс 11 связи и модуль 13 хранения данных могут быть физически распределены по системе 5, которая не должна физически содержаться в одном модуле. Два или более из модулей могут комбинироваться, так что функциональность нескольких модулей предоставляется посредством комбинированного модуля.
[47] Например, многонасосная система 5 управления может постоянно, регулярно или эпизодически проверять то, находится или нет в данный момент работающий поднабор насосов в наиболее энергосберегающем рабочем режиме, чтобы предоставлять требуемый полный расход q и требуемый общий напор Δp в жидкостную сеть 1. Требуемый полный расход q и требуемый общий напор Δp могут быть получены в итоге посредством требуемой полной нагрузки. Например, четыре насоса 3a, 3b, 3c, 3d могут иметь возможность предоставлять определенную максимальную нагрузку, только 75% которой в данный момент требуется посредством жидкостной сети 1. Многонасосная система 5 управления в силу этого может обеспечивать работу трех насосов на максимальной скорости с четырьмя вариантами в отношении того, какой из насосов отключать, например, 3d. Другой вариант заключается в том, чтобы обеспечивать работу всех четырех насосов 3a, 3b, 3c, 3d на 75% от максимальной скорости. При условии, что все насосы работающего поднабора должны работать на идентичной скорости, многонасосная система 5 управления теперь имеет пять вариантов, которые могут демонстрировать различные потребления мощности.
[48] Тем не менее, работа системы в наиболее энергосберегающим режиме не является тривиальной задачей, если отсутствует доступное измерение расхода, и текущие характеристики насоса являются неизвестными. Например, характеристики насоса могут не предоставляться, если многонасосная система 5 управления внедряется в уже установленную многонасосную систему 3. Даже если они первоначально известны, они могут показывать неизвестные отклонения от нормативов в процессе производства или могут изменяться во времени вследствие ухудшений, износа или загрязнения. Искусный прием в силу этого заключается в том, чтобы идентифицировать наиболее энергосберегающий поднабор для требуемой нагрузки при отсутствии информации относительно текущего расхода и текущих характеристик насоса.
[49] Чтобы аппроксимировать характеристики насоса, модуль 7 управления выполнен с возможностью обеспечения работы определенного числа, т.е. n, различных конфигурационных циклов. Каждый конфигурационный цикл может помечаться индексом j. Каждый конфигурационный цикл работает с различным поднабором насосов 3a, 3b, 3c, 3d. Поскольку поднабор должен изменяться между конфигурационными циклами с тем, чтобы получать информацию, каждый поднабор может помечаться идентичным индексом j. Если N=4 является общим числом насосов в многонасосной системе 3, и i -числом насосов в поднаборе j, применяются следующие условия: N≥2, 2≤n≤2N-1, и 1≤i≤N. В ходе каждого конфигурационного цикла, i насосов поднабора j работают на идентичной постоянной скорости ωj. Скорость адаптируется между конфигурационными циклами, чтобы поддерживать идентичный общий напор, т.е. перепад Δp давлений. Измеренный и отслеживаемый перепад Δpj давлений и записанная скорость ωj передаются в модуль 7 управления посредством интерфейса 11 связи, который выполнен с возможностью приема сигналов, указывающих рабочие параметры, из каждого поднабора j в ходе ассоциированного конфигурационного цикла j. Модуль обработки выполнен с возможностью определения аппроксимированной характеристики насоса в форме полинома второго порядка:
 ,
,
при условии, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q. Опорный расход q может быть измеренным или нормализованным значением, т.е. он может произвольно задаваться равным q=1. Модуль хранения данных выполнен с возможностью сохранения аппроксимированной характеристики насоса или параметры, указывающие ее, т.е. a, b и c.
[50] Кроме того, в каждом конфигурационном цикле, потребление мощности Pj=f(q, ωj) аппроксимируется посредством полинома второго порядка:
 ,
,
при условии, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q. Параметры x, y и z представляют собой параметры, указывающие потребление мощности и сохраненные в модуле хранения данных.
[51] Таким образом, шесть параметров a, b c, x, y и z могут определяться из шести уравнений, получающихся в результате посредством трех конфигурационных циклов с поднаборами из различного числа насосов. Таким образом, предпочтительно число i работающих насосов должно изменяться между циклами. Если многонасосная система содержит только два насоса, т.е. N=2, конфигурационный цикл с нулевым расходом (дополнительно поясняется ниже) может использоваться для того, чтобы предварительно определять параметры c и z, так что четыре оставшихся параметра четко определяются посредством четырех уравнений, получающихся в результате посредством обеспечения работы первого конфигурационного цикла с одним насосом и второго цикла с двумя насосами.
[52] Следующая таблица может иллюстрировать варианты обеспечения работы конфигурационных циклов для системы 3 из четырех насосов 3a, 3b, 3c, 3d, как показано на фиг. 1. Состояние всех насосов проиллюстрировано посредством двоичного числа с N=4 битов, где каждый бит представляет насос, т.е. 0 означает "деактивирован", 1 означает "активирован", и двоичный весовой коэффициент представляет число i насосов в работающем поднаборе j:
0 - "деактивирован", 1 - "активирован"
[53] Обеспечение работы более трех конфигурационных циклов должно переопределять набор параметров. Общее число перестановок для работающих поднаборов равно 2N-1, т.е. в этом случае 24-1=15. Чтобы учитывать различия между насосами, вызываемые посредством технологических допусков, износа или загрязнения, более трех конфигурационных циклов обеспечивают возможность "усреднения" по насосам. В силу этого, аппроксимация может быть ближе к реальным характеристикам насосов насосной системы.
[54] Простой случай обеспечения работы трех конфигурационных циклов, например, первого цикла (j=1) с одним (i=1) насосом, второго цикла (j=2) с двумя (i=2) насосами и третьего цикла (j=3) с тремя (i=3) насосами может реализовываться как алгоритм (здесь как метаязык на основе C) следующим образом:
for (j=1; j<4; j++){
i=j;
if (i==1){
Run pump #1 at 95% speed;
Assign q=1;
Record Δpj, ωj, Pj, qj;
Δp=Δpj;
}
else if (i==2) {
Run pumps #1 and #2;
Regulate ωj to set Δpj=Δp;
Assign qj=1/i;
Record Δpj, ωj, Pj, qj;
}
else {
Run pumps #1, #2 and #3;
Regulate ωj to set Δpj=Δp;
Assign qj=1/i;
Record Δpj, ωj, Pj, qj;
}
}
[55] Более трех конфигурационных циклов могут реализовываться как алгоритм (здесь как метаязык на основе C) следующим образом:
k=1;
//выполнение для всех возможных перестановок поднаборов j
for (j=1; j<2N; j++){
if (k=1){
Run pump #1 at 95% speed;
Assign q=1;
Record Δpj, ωj, Pj, qj;
Δp=Δpj;
k=2;
} else
//определение i поднабора j посредством подсчета 1-битов
x=j;
i=0;
while (x≥1) {
//mod(2) прибавляет 1, если x является нечетным, 0, если x является нечетным
i+=x%2;
x=floor(x/2);
}
//обеспечение работы только поднаборов из трех насосов
if (i≤3){
//обеспечение работы насоса(ов) согласно 1-битов j
x=j;
bit=1;
while (x≥1) {
if(x%2==1) {
Run pump #bit;
}
x=floor(x/2);
bit++;
}
Regulate ωj to set Δpj=Δp;
Assign q=1/i;
Record Δpj, ωj, Pj, qj;
}
}
}
[56] В вышеприведенном примере для N=4 насосов, алгоритм формирует четыре цикла с одним насосом, шесть циклов с двумя насосами и четыре цикла с тремя насосами, т.е. всего 14 циклов. Метод наименьших квадратов может использоваться для того, чтобы находить средние значения для параметров a, b c, x, y и z. Кроме того, резко отклоняющиеся значения могут определяться в ходе избыточных конфигурационных циклов, чтобы игнорировать их в усреднении и/или идентифицировать и блокировать низкоэффективные насосы многонасосной системы 3. Такие идентифицированные низкоэффективные насосы могут указываться для обслуживания, ремонта или замены. Предпочтительно, чтобы обеспечивать работу только поднаборов из трех насосов, поскольку циклы с поднаборами из множества насосов только незначительно отличаются от циклов с поднаборами с большим или меньшим на один числом насосов. Тем не менее, в принципе, конфигурационные циклы могут работать с любым числом насосов i≤N.
[57] Фиг. 2 и 3 показывают результирующие полиномиальные аппроксимации в качестве пунктирной линии. В некоторых случаях, как показано посредством пунктирных линий, аппроксимированные полиномы могут не быть точными в определенных областях. Например, пунктирные линии прогнозируют отрицательное потребление мощности при очень низком расходе, что, очевидно, является некорректным. Это может улучшаться посредством выполнения нулевого конфигурационного цикла, как пояснено далее.
[58] Перед конфигурационным циклом с нулевым расходом многонасосной системы 3 с четырьмя насосами 3a, 3b, 3c и 3d, только поднабор из трех насосов 3a, 3b и 3c может работать на скорости ωj, в то время как насос 3d не работает. В ходе конфигурационного цикла с нулевым расходом, скорость работы насоса 3d постепенно повышается. При условии, что перепад давлений, предоставленный посредством текущей скорости насоса 3d, ниже общего напора Δp, насос 3d не участвует в полном расходе. После того, как интерфейс связи 13 принимает изменение сигнала, указывающее по меньшей мере один насос, начинающий участвовать в полном расходе, текущая скорость ω0 насоса 3d записывается в момент, в который насос 3d начинает участвовать в полном расходе. Параметр c затем может определяться из  . Параметр c, определенный в конфигурационном цикле с нулевым расходом, может использоваться для того, чтобы улучшать полиномиальные аппроксимации, как показано посредством сплошных линий на фиг. 2 и 3. Как можно видеть, отсутствует прогнозирование отрицательного потребления мощности при низком расходе. Потребление мощности обычно соответствует тонкой S-форме, которая обычно лучше аппроксимируется посредством полинома третьего порядка. Тем не менее, сравнение с полиномом третьего порядка для аппроксимации потребления мощности на фиг. 3 (штрихпунктирная линия) показывает то, что полное прогнозирование аппроксимации второго порядка (сплошная линия) является довольно хорошим вплоть до максимального потребления мощности приблизительно в 100 м³/час после коррекции посредством конфигурации с нулевым расходом.
. Параметр c, определенный в конфигурационном цикле с нулевым расходом, может использоваться для того, чтобы улучшать полиномиальные аппроксимации, как показано посредством сплошных линий на фиг. 2 и 3. Как можно видеть, отсутствует прогнозирование отрицательного потребления мощности при низком расходе. Потребление мощности обычно соответствует тонкой S-форме, которая обычно лучше аппроксимируется посредством полинома третьего порядка. Тем не менее, сравнение с полиномом третьего порядка для аппроксимации потребления мощности на фиг. 3 (штрихпунктирная линия) показывает то, что полное прогнозирование аппроксимации второго порядка (сплошная линия) является довольно хорошим вплоть до максимального потребления мощности приблизительно в 100 м³/час после коррекции посредством конфигурации с нулевым расходом.
[59] Фиг. 4 и 5 показывают внезапное изменение сигнала для скорости (фиг. 3) и давления (фиг. 5), когда дополнительный насос 3d начинает участвовать в расходе. В начале фазы постепенного повышения скорости работы, три работающих насоса 3a, 3b, 3c работают постоянно приблизительно на 80% от своей максимальной скорости и предоставляют весь расход. Скорость работы насоса 3d линейно постепенно повышается на 20% от максимальной скорости в 25 секунд. Когда скорость ω0 приблизительно в 40% от максимальной скорости достигается приблизительно после 57 секунд, перепад давлений насоса 3d равен общему напору Δp, и насос 3d внезапно начинает участвовать в расходе. Модуль 7 управления реагирует сразу, чтобы поддерживать постоянным общий напор Δp посредством уменьшения скорости работающих насосов 3a, 3b, 3c приблизительно до 40% от максимальной скорости. Система затем может сходиться к общей скорости нового поднабора с i+1 насосов, т.е. всех четырех насосов, предоставляя идентичный общий напор Δp приблизительно в 40% от максимальной скорости. Тем не менее, точка, когда дополнительный насос активно присоединяется, внезапное изменение сигнала показывается в качестве возмущений в форме пика (15) давления и резкого падения (17) скорости. CUSUM-алгоритм может использоваться для того, чтобы определять это внезапное изменение сигнала.
[60] При необходимости, общий напор и/или расход могут поддерживаться по существу постоянными в ходе постепенного повышения/понижения скорости работы по меньшей мере одного насоса, как показано на фиг. 5. В варианте a), т.е. когда скорость работы по меньшей мере одного насоса постепенно повышается в дополнение к уже работающему поднабору j, поднабор j может предоставлять по существу постоянное давление, и насос после постепенного повышения скорости работы не участвует в расходе до тех пор, пока не будет достигнута скорость ω0, которая является достаточной только для того, чтобы предоставлять это постоянное давление. Аналогично, в варианте b) (не показан), т.е. когда скорость работы по меньшей мере одного насоса из работающего поднабора j постепенно понижается, поднабор j может предоставлять по существу постоянное давление, и насос после постепенного понижения скорости работы по-прежнему участвует в расходе до тех пор, пока его скорость не опустится ниже скорости ω0, которая по меньшей мере необходима для того, чтобы предоставлять это постоянное давление. В обоих случаях, это вызывает внезапное изменение сигнала, которое может показываться в качестве пика или резкого падения на схеме, на которой скорость, давление или потребление мощности записывается за время постепенного изменения скорости работы.
[61] При необходимости, принимаемое изменение сигнала идентифицируется посредством определения того, равно или превышает либо нет абсолютное значение градиента в напоре Δp, скорости ωj и/или потреблении P мощности заданное пороговое значение. При необходимости, алгоритм обнаружения изменения, например, алгоритм кумулятивных сумм (CUSUM), используется для идентификации принимаемого изменения сигнала.
[62] CUSUM-алгоритм является, в частности, полезным для обнаружения изменений среднего значения сигнала. Например, с учетом блок-схемы последовательности сигналов во времени, на которой скорость, давление или потребление мощности представляют собой сигнал, положительные и отрицательные разности сигналов относительно среднего значения могут суммироваться вплоть до отслеживаемого количества. Если отслеживаемое количество равно или превышает определенное пороговое значение, среднее значение может интерпретироваться как изменяющееся. Альтернативно или помимо этого, абсолютное значение градиента в напоре Δp, скорости ωj и/или потреблении P мощности может измеряться и сравниваться с заданным пороговым значением. Если пороговое значение достигается или превышается, внезапное изменение сигнала указывает по меньшей мере один насос, начинающий участвовать в полном расходе.
[63] Возмущения являются полезными в нулевом конфигурационном цикле, но не требуются для нормальной работы насоса, когда, например, модуль управления определяет то, что система потребляет меньше мощности с дополнительным насосом, и в силу этого постепенно повышает скорость работы другого насоса. В этом нормальном режиме работы, при необходимости, модуль управления может быть выполнен с возможностью постепенного повышения скорости работы насоса 3d в дополнение к поднабору трех насосов 3a, 3b, 3c, работающих на скорости ωj, обеспечивающей общий напор Δp, и одновременно постепенного понижения скорости работы трех насосов 3a, 3b, 3c со скорости ωj до более низкой скорости ωm, при этом скорость ωm представляет собой скорость, требуемую для того, чтобы новый поднабор четырех насосов обеспечивал общий напор Δp. Такая одновременная сходимость скоростей показана на фиг. 6, где параметр α варьируется между 0 (начало постепенного изменения скорости работы) и 1 (конец постепенного изменения скорости работы). Возмущения, как показано на фиг. 4 и 5 для конфигурационных циклов с нулевым расходом, должны значительно уменьшаться, поскольку работающий поднабор из трех насосов 3a, 3b, 3c уже имеет конечную скорость ωm, когда четвертый насос 3d присоединяется к участию в расходе на идентичной скорости ωm. Поскольку любые возмущения представляют энергетическую неэффективность, эта одновременная сходимость сокращает мощность и может упоминаться "как плавное включение/выключение насосов". Общий напор Δp и/или полный расход поддерживаются, по существу, постоянными в ходе постепенного изменения скорости работы для всех значений α.
[64] Знание скорости ω0 и аппроксимированного потребления мощности P=f(q, ωj) и/или аппроксимированной характеристики насоса Δp=f(q, ωj) может обеспечивать возможность модулю управления постепенно повышать/понижать скорость работы согласно по меньшей мере одной заданной модельной кривой. В силу этого, время для сходимости после того, как дополнительные насосы активно присоединяются к участию в расходе, может значительно уменьшаться, поскольку может прогнозироваться конечная скорость ωm. Соответствие заданной модельной кривой может автоматически приводить к постоянному общему напору Δp и/или полному расходу для всех значений α. Следовательно, контур обратной связи для управления на основе отслеживаемых измеренных значений может не требоваться.
[65] Если скорость работы одного или более насосов работающего поднабора постепенно понижается, обратный путь от параметра α со значением 1 (начало постепенного изменения скорости работы) к 0 (конец постепенного изменения скорости работы) вытекает аналогично. Аналогично, также конфигурационные циклы с нулевым расходом могут работать посредством постепенного понижения скорости работы одного или более насосов работающего поднабора и записи скорости, при которой насос(ы) после постепенного понижения скорости работы внезапно прекращают участвовать в полном расходе.
[66] Фиг. 7 показывает пример этапов способа в некотором последующем порядке. Тем не менее, способ может реализовываться в другом порядке этапов, или этапы способа могут повторяться или выполняться параллельно с другими этапами способа. На фиг. 7, конфигурационный цикл с нулевым расходом работает (701) посредством постепенного повышения (703a) скорости работы одного насоса в дополнение к поднабору j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее насос, начинающий участвовать в полном расходе, и определения (705a) аппроксимированной характеристики  насоса и потребления
насоса и потребления  мощности, при этом ω0 представляет собой скорость насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе. Альтернативно или помимо этого, конфигурационный цикл с нулевым расходом работает (701) посредством постепенного понижения (703b) скорости работы одного насоса поднабора j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее насос, прекращающий участвовать в полном расходе, и определения (705b) аппроксимированной характеристики насоса и потребления мощности, при этом ω0 представляет собой скорость насоса после постепенного понижения скорости работы в момент, в который он прекращает участвовать в полном расходе.
мощности, при этом ω0 представляет собой скорость насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе. Альтернативно или помимо этого, конфигурационный цикл с нулевым расходом работает (701) посредством постепенного понижения (703b) скорости работы одного насоса поднабора j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее насос, прекращающий участвовать в полном расходе, и определения (705b) аппроксимированной характеристики насоса и потребления мощности, при этом ω0 представляет собой скорость насоса после постепенного понижения скорости работы в момент, в который он прекращает участвовать в полном расходе.
[67] Способ, как показано на фиг. 7, дополнительно содержит обеспечение работы (707) n различных конфигурационных циклов с поднаборами из i насосов, работающих на скорости ωj. В ходе каждого конфигурационного цикла, j, сигналы, указывающие рабочие параметры, принимаются (709) из работающего поднабора j. Способ дополнительно содержит определение (711a) аппроксимированной характеристики насоса 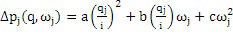 и определение (711b) потребления мощности на основе принимаемых сигналов и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q. Характеристика насоса (или параметры a, b и c, указывающие ее) и потребление мощности (или параметры x, y и z, указывающие его) затем сохраняются (713).
и определение (711b) потребления мощности на основе принимаемых сигналов и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q. Характеристика насоса (или параметры a, b и c, указывающие ее) и потребление мощности (или параметры x, y и z, указывающие его) затем сохраняются (713).
[68] Поднабор k с наименьшим потреблением мощности для требуемой нагрузки затем определяется (715) на основе аппроксимированного потребления мощности и/или аппроксимированной характеристики насоса, сохраненной в модуле 13 хранения данных. Многонасосная система затем управляется (717) посредством определенного поднабора k, имеющего наименьшее потребление мощности для требуемой нагрузки. Когда более эффективно с точки зрения энергии изменять работающий поднабор на i+1 или i-1 насосов, другой насос может плавно включаться/выключаться (719) посредством либо:
- постепенного повышения (721a) скорости работы насоса в дополнение к поднабору j из i насосов, работающих на скорости ωj, обеспечивающей общий напор Δp, и постепенного понижения (723a) скорости работы i насосов поднабора j со скорости ωj до более низкой скорости ωm, при этом скорость ωm представляет собой скорость, требуемую для того, чтобы поднабор m из i+1 насосов обеспечивал общий напор Δp; либо
- постепенного понижения (721b) скорости работы насоса поднабора j из i насосов, работающих на скорости ωj, обеспечивающей общий напор Δp, и постепенного повышения (723b) скорости работы i-1 насосов остаточного поднабора r со скорости ωj до более высокой скорости ωr, при этом скорость ωr представляет собой скорость, требуемую для того, чтобы остаточной поднабор r из i-1 насосов обеспечивал общий напор Δp.
[69] Если, в вышеприведенном описании, упоминаются целые числа или элементы, которые имеют известные, очевидные или прогнозируемые эквиваленты, то такие эквиваленты включаются в данный документ, как если изложены отдельно. Для определения истинного объема настоящего раскрытия сущности следует обратиться к формуле изобретения, которая должна истолковываться как охватывающая все такие эквиваленты. Читатели также должны принимать во внимание, что целые числа или признаки раскрытия сущности, которые считаются необязательными, предпочтительными, преимущественными, удобными и т.п., являются необязательными и не ограничивают объем независимых пунктов формулы изобретения.
[70] Вышеуказанные варианты осуществления должны пониматься как иллюстративные примеры раскрытия сущности. Следует понимать, что любой признак, описанный со ссылкой на любой один вариант осуществления, может использоваться отдельно или в комбинации с другими описанными признаками, и также может использоваться в комбинации с одним или более признаков любых других вариантов осуществления или в любой комбинации любых других вариантов осуществления. Хотя показан и описан по меньшей мере один примерный вариант осуществления, следует понимать, что другие модификации, подстановки и альтернативы являются очевидными для специалистов в данной области техники и могут изменяться без отступления от объема предмета изобретения, и эта заявка, описанная в данном документе имеет намерение охватывать все адаптации или варьирования конкретных вариантов осуществления, поясненных в данном документе.
[71] Помимо этого, "содержащий" не исключает другие элементы или этапы, и "a" или "один" не исключает множественное число. Кроме того, характеристики или этапы, которые описываются со ссылкой на один из вышеуказанных примерных вариантов осуществления, также могут использоваться в сочетании с комбинации характеристиками или этапами других примерных вариантов осуществления, описанных выше. Этапы способа могут применяться в любом порядке или параллельно либо могут составлять часть или более подробную версию другого этапа способа. Следует понимать, что все такие модификации должны осуществляться в пределах патента, гарантированного здесь так, что они достаточно и надлежаще находятся в пределах объема вклада в область техники. Такие модификации, подстановки и альтернативы могут вноситься без отступления от сущности и объема раскрытия сущности, которые должны определяться из прилагаемой формулы изобретения и ее допустимых эквивалентов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ МНОЖЕСТВОМ НАСОСОВ | 2018 |
|
RU2689261C1 |
| СИСТЕМА УПРАВЛЕНИЯ МНОЖЕСТВОМ НАСОСОВ | 2018 |
|
RU2685786C1 |
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ МНОЖЕСТВОМ НАСОСОВ И КОМПЬЮТЕРНО-ЧИТАЕМЫЙ НОСИТЕЛЬ С ИНСТРУКЦИЕЙ ПО ИСПОЛНЕНИЮ СПОСОБА | 2021 |
|
RU2773352C1 |
| Способ управления насосными агрегатами | 2021 |
|
RU2762925C1 |
| МНОГОНАСОСНАЯ УСТАНОВКА И СПОСОБ ЕЕ ЭКСПЛУАТАЦИИ | 2018 |
|
RU2740387C1 |
| СПОСОБ И УСТРОЙСТВО ПОКАДРОВОГО КОДИРОВАНИЯ ОСТАТОЧНОГО ДВИЖЕНИЯ НА ОСНОВАНИИ СВЕРХПОЛНОГО БАЗИСНОГО ПРЕОБРАЗОВАНИЯ ДЛЯ УПЛОТНЕНИЯ ВИДЕОИЗОБРАЖЕНИЯ | 2004 |
|
RU2335803C2 |
| ПРИВОД РАБОЧЕГО ОРГАНА ЗЕМЛЕРОЙНОЙ МАШИНЫ | 1997 |
|
RU2112842C1 |
| АВТОМАТИЗИРОВАННАЯ ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ ИЗМЕРЕНИЯ И АНАЛИЗА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ РАСХОДА ТЕПЛОНОСИТЕЛЯ НА МАГИСТРАЛЬНЫХ НАСОСНЫХ СТАНЦИЯХ | 2011 |
|
RU2473048C1 |
| СООБЩЕНИЕ ЗАПАСА ПО МОЩНОСТИ ВОСХОДЯЩЕЙ ЛИНИИ СВЯЗИ ДЛЯ АГРЕГАЦИИ НЕСУЩИХ | 2009 |
|
RU2522175C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РАСХОДНОЙ ХАРАКТЕРИСТИКИ ГИДРАВЛИЧЕСКОГО ТРАКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2582486C1 |
Группа изобретений касается систем управления множеством центробежных насосов с регулируемой скоростью и может быть использована на насосных станциях водопроводной сети. Система (5) управления содержит модуль (7) управления, модуль (9) обработки, интерфейс (11) связи и модуль (13) хранения данных. Модуль (7) управления выполнен с возможностью постепенного повышения скорости работы k насосов в дополнение к поднабору j из i насосов системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<N и 1≤i<N. Модуль (7) управления выполнен с возможностью постепенного понижения скорости работы i насосов поднабора j со скорости ωj до более низкой скорости ωm, требуемой для того, чтобы поднабор m из i+k насосов обеспечивал общий напор Δp. Модуль (7) также выполнен с возможностью постепенного понижения скорости работы k насосов поднабора j из i насосов системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<i и 1<i≤N. При этом модуль (7) выполнен с возможностью постепенного повышения скорости работы i-k насосов остаточного поднабора r со скорости ωj до более высокой скорости ωr, требуемой для того, чтобы остаточный поднабор r из i-k насосов обеспечивал общий напор Δp. Изобретения направлены на сокращение потребляемой мощности путем обеспечения плавного включения и выключения насосов системы. 3 н. и 24 з.п. ф-лы, 7 ил.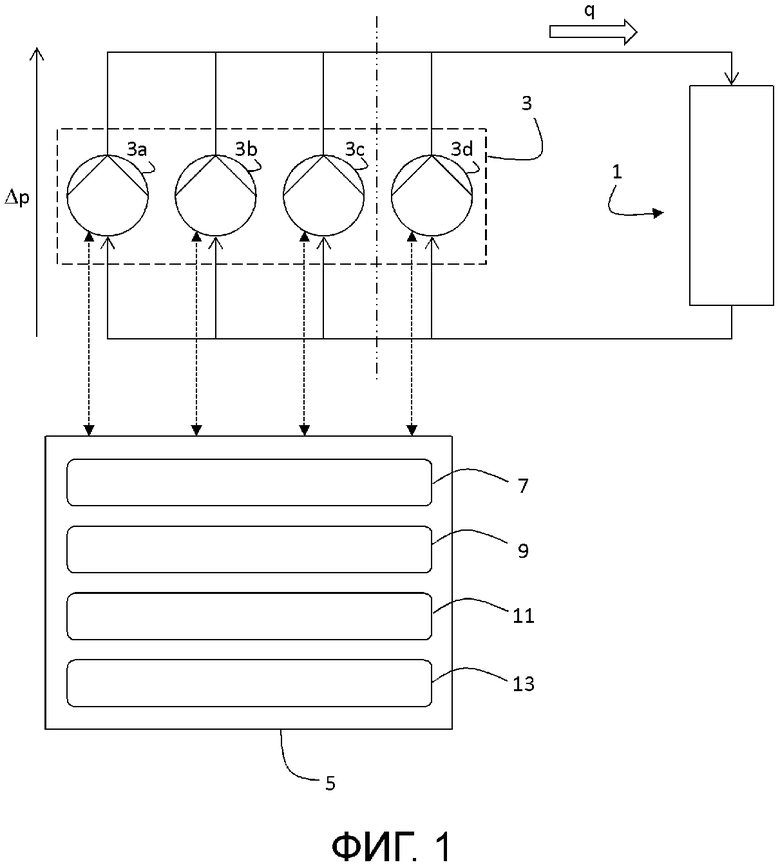
1. Многонасосная система (5) управления, содержащая:
- модуль (7) управления,
- модуль (9) обработки,
- интерфейс (11) связи и
- модуль (13) хранения данных,
при этом модуль (7) управления выполнен с возможностью:
a) постепенного повышения, согласно по меньшей мере одной заданной модельной кривой, скорости работы k насосов в дополнение к поднабору j из i насосов многонасосной системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<N и 1≤i<N, при этом модуль (7) управления выполнен с возможностью постепенного понижения скорости работы i насосов поднабора j со скорости ωj до более низкой скорости ωm, при этом скорость ωm представляет собой скорость, требуемую для того, чтобы поднабор m из i+k насосов обеспечивал, по существу, постоянный общий напор Δp и, по существу, постоянный полный расход q, и/или
b) постепенного понижения, согласно по меньшей мере одной заданной модельной кривой, скорости работы k насосов поднабора j из i насосов многонасосной системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<i и 1<i≤N, при этом модуль (7) управления выполнен с возможностью постепенного повышения скорости работы i-k насосов остаточного поднабора r со скорости ωj до более высокой скорости ωr, при этом скорость ωr представляет собой скорость, требуемую для того, чтобы остаточный поднабор r из i-k насосов обеспечивал, по существу, постоянный общий напор Δp и, по существу, постоянный полный расход q.
2. Многонасосная система (5) управления по п. 1, в которой модуль (7) управления выполнен с возможностью поддержания постоянного общего напора Δp при постепенном повышении/понижении скорости работы.
3. Многонасосная система (5) управления по любому из предшествующих пунктов, в которой модуль (7) управления выполнен с возможностью:
a) обеспечения работы конфигурационного цикла с нулевым расходом посредством постепенного повышения скорости работы по меньшей мере одного насоса в дополнение к поднабору j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс (11) связи не примет изменение сигнала, указывающее по меньшей мере один насос, начинающий участвовать в полном расходе q, и при этом модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики  насоса и/или потребления
насоса и/или потребления  мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе q, и/или
мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе q, и/или
b) обеспечения работы конфигурационного цикла с нулевым расходом посредством постепенного понижения скорости работы по меньшей мере одного насоса поднабора j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс (11) связи не принимает изменение сигнала, указывающее по меньшей мере один насос, прекращающий участвовать в полном расходе q, и при этом модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики насоса и/или потребления мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного понижения скорости работы в момент, в который он прекращает участвовать в полном расходе q.
4. Многонасосная система (5) управления по п. 3, в которой модуль (9) обработки выполнен с возможностью идентифицирования принимаемого изменения сигнала посредством использования алгоритма обнаружения изменения, например алгоритма кумулятивных сумм (CUSUM).
5. Многонасосная система (5) управления по п. 3 или 4, в которой модуль (9) обработки выполнен с возможностью идентифицирования принимаемого изменения сигнала посредством определения того, равно или превышает либо нет абсолютное значение градиента в напоре Δp, скорости ωj и/или мощности P заданное пороговое значение.
6. Многонасосная система (5) управления по любому из предшествующих пунктов,
- в которой модуль (7) управления выполнен с возможностью обеспечения работы n различных поднаборов i насосов многонасосной системы (3), содержащей N насосов, в течение n различных конфигурационных циклов на скорости ωj, где N≥2, 2≤n≤2N-1 и 1≤i≤N, при этом каждый конфигурационный цикл j∈{1,..., n} ассоциирован с поднабором j∈{1,..., n} и скоростью ωj,
- при этом интерфейс (11) связи выполнен с возможностью приема сигналов, указывающих рабочие параметры, из каждого поднабора j в ходе ассоциированного конфигурационного цикла j,
- при этом модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики насоса Δp=f(q, ωj) на основе принимаемых сигналов для каждого поднабора j и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q,
- при этом модуль (13) хранения данных выполнен с возможностью сохранения аппроксимированной характеристики насоса Δp=f(q, ωj) или параметров, указывающих ее.
7. Многонасосная система (5) управления по п. 6, в которой модуль (9) обработки выполнен с возможностью определения аппроксимированного потребления мощности насосов P=f(q, ωj) на основе принимаемых сигналов для каждого поднабора j и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q, при этом модуль (13) хранения данных выполнен с возможностью сохранения аппроксимированного потребления мощности P=f(q, ωj) или параметров, указывающих его.
8. Многонасосная система (5) управления по п. 6 или 7, в которой модуль (9) обработки выполнен с возможностью определения поднабора k с наименьшим потреблением мощности для требуемой нагрузки на основе аппроксимированного потребления мощности P=f(q, ωj) и/или аппроксимированной характеристики насоса Δp=f(q, ωj), сохраненной в модуле (13) хранения данных.
9. Многонасосная система (5) управления по п. 8, в которой модуль (7) управления выполнен с возможностью управления многонасосной системой (3) с определенным поднабором k, имеющим наименьшее потребление мощности для требуемой нагрузки.
10. Многонасосная система (5) управления по любому из пп. 6-9, в которой модуль (7) управления выполнен с возможностью обеспечения работы i насосов поднабора j на идентичной скорости ωj в ходе конфигурационного цикла j, при этом скорость ωj i насосов поднабора j в конфигурационном цикле j отличается от скорости ωk s насосов поднабора k в другом конфигурационном цикле k, где j≠s, при этом общий напор Δp, сформированный посредством многонасосной системы, является, по существу, идентичным для обоих конфигурационных циклов j, k.
11. Многонасосная система (5) управления по любому из пп. 6-10, в которой модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики насоса Δp=f(q, ωj) посредством определения параметров a, b и c полинома второго порядка 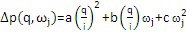 , при этом параметр c является определимым в конфигурационном цикле с нулевым расходом посредством
, при этом параметр c является определимым в конфигурационном цикле с нулевым расходом посредством  .
.
12. Многонасосная система (5) управления по любому из пп. 7-11, в которой модуль (9) обработки выполнен с возможностью определения аппроксимированного потребления мощности P=f(q, ωj) посредством определения параметров x, y и z полинома второго порядка 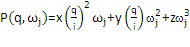 , при этом параметр z является определимым в конфигурационном цикле с нулевым расходом посредством
, при этом параметр z является определимым в конфигурационном цикле с нулевым расходом посредством  .
.
13. Многонасосная система (5) управления по любому из пп. 11 или 12, в которой модуль (9) обработки выполнен с возможностью определения аппроксимированной характеристики насоса Δp=f(q, ωj) и/или потребления мощности P=f(q, ωj) посредством метода наименьших квадратов, если число конфигурационных циклов равно или превышает число параметров, которые должны определяться.
14. Способ управления многонасосной системой, включающий этапы, на которых:
a) - постепенно повышают (721a), согласно по меньшей мере одной заданной модельной кривой, скорость работы k насосов в дополнение к поднабору j из i насосов многонасосной системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<N и 1≤i<N, и
- постепенно понижают (723a), согласно по меньшей мере одной заданной модельной кривой, скорость работы i насосов поднабора j со скорости ωj до более низкой скорости ωm, при этом скорость ωm представляет собой скорость, требуемую для того, чтобы поднабор m из i+k насосов обеспечивал, по существу, постоянный общий напор Δp и, по существу, постоянный полный расход q, и/или
b) - постепенно понижают (721b), согласно по меньшей мере одной заданной модельной кривой, скорость работы k насосов поднабора j из i насосов многонасосной системы, содержащей N насосов и работающей на скорости ωj, обеспечивающей общий напор Δp, где N≥2, 1≤k<i и 1<i≤N, и
- постепенно повышают (723b), согласно по меньшей мере одной заданной модельной кривой, скорость работы i-k насосов остаточного поднабора r со скорости ωj до более высокой скорости ωr, при этом скорость ωr представляет собой скорость, требуемую для того, чтобы остаточный поднабор r из i-k насосов обеспечивал, по существу, постоянный общий напор Δp и, по существу, постоянный полный расход q.
15. Способ по п. 14, включающий этап, на котором поддерживают постоянным общий напор Δp при постепенном повышении/понижении скорости работы.
16. Способ по любому из пп. 14, 15, включающий этапы, на которых:
c) - выполняют (710) конфигурационный цикл с нулевым расходом посредством постепенного повышения (703a) скорости работы по меньшей мере одного насоса в дополнение к поднабору j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее по меньшей мере один насос, начинающий участвовать в полном расходе q, и
- определяют (705a) аппроксимированную характеристику насоса  и/или потребление
и/или потребление  мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе q, и/или
мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного повышения скорости работы в момент, в который он начинает участвовать в полном расходе q, и/или
d) - обеспечивают работу (701) конфигурационного цикла с нулевым расходом посредством постепенного понижения (703b) скорости работы по меньшей мере одного насоса поднабора j из i насосов многонасосной системы, работающей на скорости ωj, до тех пор, пока интерфейс связи не примет изменение сигнала, указывающее по меньшей мере один насос, прекращающий участвовать в полном расходе q, и
- определяют (705b) аппроксимированную характеристику насоса и/или потребление мощности, при этом ω0 представляет собой скорость по меньшей мере одного насоса после постепенного понижения скорости работы в момент, в который он прекращает участвовать в полном расходе q.
17. Способ по п. 16, включающий этап, на котором идентифицируют принимаемое изменение сигнала посредством использования алгоритма обнаружения изменения, например алгоритма кумулятивных сумм (CUSUM).
18. Способ по п. 16 или 17, включающий этап, на котором идентифицируют принимаемое изменение сигнала посредством определения того, равно или превышает либо нет абсолютное значение градиента в напоре Δp, скорости ωj и/или мощности P заданное пороговое значение.
19. Способ по любому из пп. 14-18, включающий этапы, на которых:
- обеспечивают работу (707) n различных поднаборов i насосов многонасосной системы (3), содержащей N насосов, в течение n различных конфигурационных циклов на скорости ωj, где N≥2, 2≤n≤2N-1 и 1≤i≤N, при этом каждый конфигурационный цикл j∈{1,..., n} ассоциирован с поднабором j∈{1,..., n} и скоростью ωj,
- принимают (709) сигналы, указывающие рабочие параметры, из каждого поднабора j в ходе ассоциированного конфигурационного цикла j,
- определяют (711a) аппроксимированную характеристику насоса Δp=f(q, ωj) на основе принимаемых сигналов для каждого поднабора j и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q,
- сохраняют (713) аппроксимированную характеристику насоса Δp=f(q, ωj) или параметры, указывающие ее.
20. Способ по п. 19, включающий этап, на котором определяют (711b) аппроксимированное потребление мощности насосов P=f(q, ωj) на основе принимаемых сигналов для каждого поднабора j и при таком допущении, что i насосов каждого поднабора j совместно используют идентичную часть q/i опорного расхода q, и сохраняют аппроксимированное потребление мощности P=f(q, ωj) или параметров, указывающих его.
21. Способ по п. 19 или 20, включающий этап, на котором определяют (715) поднабор k с наименьшим потреблением мощности для требуемой нагрузки на основе аппроксимированного потребления мощности P=f(q, ωj) и/или аппроксимированной характеристики насоса Δp=f(q, ωj), сохраненной в модуле (13) хранения данных.
22. Способ по п. 21, включающий этап, на котором управляют (717) многонасосной системой с определенным поднабором k, имеющим наименьшее потребление мощности для требуемой нагрузки.
23. Способ по любому из пп. 19-22, включающий этап, на котором обеспечивают работу i насосов поднабора j на идентичной скорости ωj в ходе конфигурационного цикла j, при этом скорость ωj из i насосов поднабора j в конфигурационном цикле j отличается от скорости ωk s насосов поднабора k в другом конфигурационном цикле k, где j≠s, при этом общий напор Δp, сформированный посредством многонасосной системы, является, по существу, идентичным для обоих конфигурационных циклов j, k.
24. Способ по любому из пп. 19-23, включающий этап, на котором определяют аппроксимированную характеристику насоса Δp=f(q, ωj) посредством определения параметров a, b и c полинома второго порядка , при этом ωj представляет собой скорость i насосов поднабора j.
25. Способ по любому из пп. 20-24, включающий этап, на котором определяют аппроксимированное потребление мощности P=f(q, ωj) посредством определения параметров x, y и z полинома второго порядка , при этом ωj представляет собой скорость i насосов поднабора j.
26. Способ по любому из пп. 19-25, включающий этап, на котором определяют аппроксимированную характеристику насоса Δp=f(q, ωj) и/или потребления мощности P=f(q, ωj) посредством метода наименьших квадратов, если число конфигурационных циклов равно или превышает число параметров, которые должны определяться.
27. Машиночитаемый носитель с инструкциями для осуществления способа по любому из пп. 14-26.
| Многоступенчатый экстрактор | 1974 |
|
SU735273A1 |
| Плоский свод нагревательного устройства | 1979 |
|
SU905596A1 |
| РАСТЕНИЯ ТОМАТА, ОБЛАДАЮЩИЕ ПОВЫШЕННЫМИ УРОВНЯМИ УСТОЙЧИВОСТИ К BOTRYTIS | 2007 |
|
RU2469094C2 |
| EP 2940309 A1, 04.11.2015 | |||
| WO 2008121051 A1, 09.10.2008 | |||
| СИСТЕМА И СПОСОБ УПРАВЛЕНИЯ ДАВЛЕНИЕМ В СЕТИ | 2011 |
|
RU2579424C2 |

