Область техники
Предлагаемое изобретение относится к устройствам для измерения ультразвуковых колебаний с помощью магнитных и электрических средств.
Предшествующий уровень техники
Для бурения нефтяных и газовых скважин требуется буровая установка, которая включает в себя площадку с роторным столом, вертикальную вышку, расположенную над роторным столом, и передвижной блок или другой подъемный механизм, который можно поднимать и опускать в пределах вышки.
Этот механизм подъема может быть оснащен верхним приводным механизмом. Во время проведения буровых работ данное оборудование используется для подъема и спуска трубчатых изделиями (бурильных труб, насосно-компрессорных труб, обсадных труб и т.п.) через вращающийся стол ротора в или из ствола скважины, который простирается в земную кору.
После того, как скважина пробурена на определенную глубину, обсадная колонна спускается в скважину и цементируется, и данная последовательность используется для последующих интервалов.
В процессе цементирования в скважину часто используют разделительные пробки, состоящие обычно из резины, пластмассы или комбинации материалов. В большинстве случаев эти пробки или дартс загружаются и удерживаются в цементирующей головке до тех пор, пока они не будут запущены в обсадную колонну в требуемое время. Как только они запускаются, они перемещаются с потоком жидкости или раствора вниз по трубе в скважину. Важно точно знать, когда эти пробки или дартс были успешно выпущены в обсадную колонну ниже цементирующей головки.
В большинстве случаев нижняя разделительная пробка с полым сердечником и разрывной мембраной сбрасывается в обсадную колонну с использованием цементировочной головки перед закачкой цементного раствора в скважину для отделения цементного раствора от жидкости, уже находящейся в стволе скважины. Эта первая разделительная пробка продавливается вниз обсадной колонны за счет закачиваемого цементного раствора до тех пор, пока она не достигнет ограничения, обычно называемого центральным обратным клапаном устанавливаемого вблизи конца обсадной колонны, где она останавливается. После того, как пробка остановилась, продолжающаяся закачка увеличивает давление внутри колонны, что приводит к разрыву мембраны, и цементный раствор начинает заполнять оставшуюся часть обсадной колонны, а затем кольцевое пространство между стенками скважины и обсадной колонной.
Как только расчетный объем цемента закачен, сбрасывается вторая резиновая пробка со сплошным сердечником для отделения цементного раствора от продавочной жидкости. Важно отметить, что в этот момент во время многих операций цементирования цементный раствор продолжает перемещаться вниз по обсадной колонне, даже когда насосы остановлены для сброса пробки.
Это происходит потому, что плотность цементного раствора обычно выше, чем плотность жидкости в скважине, что создает гидростатический дисбаланс между столбом жидкости в обсадной колонне и межколонном пространстве скважины, также известного как явлением перетока жидкости между сообщающимися сосудами. Поэтому в момент сброса верхней пробки в цементной головке и части обсадной колонны ниже ее отсутствует жидкость.
После того как верхняя пробка сброшена, начинает закачиваться не цементная жидкость, такая как буровой раствор, солевой раствор или вода, заставляя вторую пробку двигаться вниз вытесняя цементный раствор из обсадной колонны в кольцевое пространство. Как правило, конец замещения цемента наблюдается, когда вторая пробка останавливается из за ограничения внутри обсадной колонны (в виде обратного клапана), либо первой пробки, предварительно сброшенной ранее, что вызывает увеличение давления, наблюдаемого на поверхности.
Это увеличение давления ясно указывает на то, что цементный раствор вытеснен из обсадной колонны в межкольцевое пространство. Таким образом, циркуляция прекращается, и цемент оставляют на время набора твердости камня. Этот процесс цементирования эффективно изолирует межкольцевое пространство, тем самым предотвращая межпластовые перетоки углеводородов по кольцевому пространству и загрязнение мелких водоносных горизонтов теми же углеводородами.
Ограничения, установленные на конце обсадной колонны, такие как центральный обратный клапан или направляющий башмак, обычно содержит обратный клапан, который предотвращает затекание цементного раствора обратно в колонну до тех пор, пока цемент не затвердеет.
Точное знание того, что разделительная или продавочная пробка успешно сброшена в скважину, имеет важное значение для выполнения операции по цементированию. При отсутствии этой информации могут возникнуть одна или несколько серьезных проблем. Например, неточная информация о пуске продавочной пробки может привести к неправильному объему продавки, что может привести к неполному вытеснению цементного раствор из обсадной колонны и оставлению незапланированного цементного стакана над центральным обратным клапаном или перепродавки что приведет к отсутствию цемента в межколонном пространстве снизу колонны.
Известно техническое решение с механической рычажной системой. Для подтверждения того что пробка покидает цементную головку устанавливают механическую рычажную систему цементной головки. Такие механические рычаги, приводимые в действие касанием пробки, могут ложно указывать проход пробки, даже если она все еще находится внутри цементной головки. Ложно положительная индикация запуска пробки, может привести к отказу к аварийным последствиям в виду чрезмерной продавки цементного раствора.( Механическая рычажная система имеет широкое распространение и устанавливается на многих моделях цементировочных головок различных производителей (данные об устройстве и работе механических индикаторов опубликованы в каталогах производителей цементных головок)).
Известно техническое решение с использованием радиочастотных идентификаторов (RFID) (https://patents.google.com/patent/GB2413814A/en?oq=GB2413814, https://patents.google.com/patent/US6597175B1/en?g=~patent%2fUS20110214853A1&assignee=Halliburton+Energv+Services%2c+Inc). данное решение требует радиочастотной связи внутри цементной головки. Хотя этот метод является привлекательным сначала, необходимость иметь электрический узел высокого давления для включения радиочастотного сигнала в обсадную трубу ограничила применение этого метода.
Известно техническое решение с использованием радиоактивных материалов, включенных в пробки (https://patents.google.com/patent/US20110214853A1/en?oq=20110214853 (упоминается в данном патенте как предыдущее техническое решение)). Как только пробка покидает цементную головку, прибор измерения радиации, такой как счетчик Гейгера, укажет, что пробка оставила исходное положение. Ограничения этого метода включают проблемы охраны здоровья и безопасности, связанные с хранением и транспортировкой радиоактивных материалов.
Известен также акустический метод, который включает в себя использование одного или несколько микрофонов для обнаружения звука прохода пробки (https://patents.google.com/patent/US4468967). Звуковые сигнатуры требуют интерпретации и не обеспечивают немедленного и четкого указания прохода пробки.
Известен способ, включающий в себя магнитные детекторы (геркон) или другие микропереключатели (https://patents.qooqle.com/patent/US4928520A/en?oq=4928520). Оба этих варианта ограничены из-за трудностей с установкой электронных компонентов внутри цементной головки и надежностью этих устройств в условиях высокого давления и абразивной среды.
Известен способ с использованием ультразвуковых устройств, излучающих ультразвук по внутреннему диаметру обсадной колонны, чтобы идентифицировать проход пробки. Этот метод, используемый в трубопроводах для обнаружения прохода «Пигов», неприменим в случаях, когда труба не полностью заполнена жидкостью, как это часто происходит в конце заканчивания цементного раствора перед сбросом верхней пробки.
Недостатки известных способов и устройств:
Все существующие устройства известных технических решений характерны тем, что не всегда могут точно определить прохождение перемещающегося объекта.
Наиболее близким к заявляемому изобретению является патент США на изобретение №6597175, МПК G01V 3/08, «Электромагнитное детекторное устройство для определения прохождения перемещающегося объекта в нефтяной или газовой скважине и способ определения». Детекторное устройство для нефтяной или газовой скважины содержит: корпус, перемещаемый внутри трубопровода нефтяной или газовой скважины; электрическую цепь, соединенную с корпусом, электрическую цепь для передачи электромагнитного сигнала, передаваемого перемещающимся объектом, когда объект перемещается внутри трубопровода; и приемник для приема электромагнитного сигнала от электрической цепи. Устройство может дополнительно содержать передатчик для передачи в канал электромагнитного сигнала переменного тока, в котором электрическая схема передает свой электромагнитный сигнал в ответ на электромагнитный сигнал переменного тока от передатчика.
Недостатком данного технического решения является то, что для работы мобильного устройства требуется внесение изменений в конструкцию цементировочной головки а также необходимость установки дополнительных устройств, устанавливаемых на пробки.
Раскрытие изобретения
Задача, на решение которой направлен предлагаемый способ определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах и мобильное устройство для осуществления данного способа заключается в создании надежного, точного и простого в эксплуатации мобильного устройства для определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах, без изменения конструкции существующих цементировочных головок и надежного способа определения прохождения перемещающегося объекта.
Поставленная задача решается за счет того, что способ определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах включает определение прохода перемещающегося объекта с помощью мобильного устройства в зоне установки мобильного устройства ниже цементировочной головки. Предварительно устанавливают параметры работы мобильного устройства, такие как, температурный режим, скоростной режим, временной промежуток записи параметров, временное и зональное ориентирование, параметры самокалибровки, частоту и цвет моргания световых элементов. Далее мобильное устройство закрепляют вертикально на внешней поверхности трубы посредством постоянного магнита на уровне ниже цементировочной головки. Затем инициируют включение мобильного устройства посредством передачи сигнала на микроконтроллер. После чего мобильное устройство автоматически производит самокалибровку, которая включает в себя проверку толщины стенки трубы и вертикальность установки мобильного устройства по отношению к трубе. После этого микроконтроллер через блок управления датчиков подает сигнал включения группе датчиков. Затем датчик передачи ультразвуковых волн начинает излучать внутрь трубы разнонаправленные ультразвуковые волны, а датчики приема начинают принимать эти волны, отраженные от внутренней стороны стенки трубы. Одновременно с началом работы мобильного устройства, группа датчиков отправляет сигнал через блок управления датчиков на микроконтроллер, устройство анализа которого, в свою очередь, анализирует этот сигнал и распространяет информацию о нем на индикаторы, на внешнее устройство, на дисплей, который отображает информацию о запуске работы датчиков и на жесткий диск, который начинает запись принятой информации. На момент начала работы группы датчиков оба датчика приема, расположенных вертикально с обеих сторон от датчика передачи сигнала, принимают ультразвуковые волны с одинаковыми амплитудами, а устройство анализа микроконтроллера сравнивает информацию, поступающую с обоих датчиков приема. В момент, когда перемещающийся объект достиг уровня верхнего датчика приема, ультразвуковая волна в зоне нахождения перемещающегося объекта, перестает отражаться от внутренней стороны стенки трубы, а верхний датчик приема перестает получать эту волну, при этом устройство анализа микроконтроллера, получившее сигнал с верхнего и нижнего датчика приема, анализирует этот сигнал и делает вывод о нахождении перемещающегося объекта в зоне верхнего датчика приема. Микроконтроллер, используя этот анализ, распространяет информацию о событии на индикаторы, и на жесткий диск. Затем перемещающийся объект входит в зону нижнего датчика приема, в результате чего оба датчика приема перестают получать отраженную ультразвуковую волну и сигнал об этом передают на микроконтроллер, устройство анализа, которого анализирует этот сигнал и делает вывод о нахождении перемещающегося объекта в зоне верхнего и нижнего датчиков приема. Микроконтроллер, распространяет информацию о произошедшем событии на индикаторы и на жесткий диск. Когда перемещающийся объект покидает зону верхнего датчика приема, верхний датчик приема начинает получать ультразвуковую волну и передает сигнал об этом на микроконтроллер. Устройство анализа микроконтроллера, в свою очередь, получив сигнал с верхнего и нижнего датчика приема, анализирует его и делает вывод о нахождении перемещающегося объекта только в зоне нижнего датчика приема. После чего микроконтроллер распространяет информацию о событии на индикаторы и на жесткий диск. Далее перемещающийся объект проходит уровень нижнего датчика приема. В этот момент нижний датчик приема снова начинает получать ультразвуковую волну и подает сигнал на микроконтроллер. Устройство анализа микроконтроллера, в свою очередь, сравнивая сигналы, поступившие с верхнего и нижнего датчиков приема, делает вывод о выходе перемещающегося объекта из зоны группы датчиков. Микроконтроллер распространяет информацию о совершившемся событии на индикаторы, дисплей, внешнее устройство и на жесткий диск. После чего устройство анализа микроконтроллера делает вывод о факте прохождения перемещающегося объекта зоны расположения мобильного устройства и передает эту информацию на индикаторы, дисплей, на внешнее устройство и на жесткий диск.
В случае когда устройство анализа микроконтроллера, настроенное на заданные параметры, в течении заданного времени не получает сигналы с датчиков приема о возобновлении получения ультразвуковой волны, устройство анализа микроконтроллера делает вывод о наступлении аварийной ситуации. Микроконтроллер, используя анализ о событии, распространяет информацию на индикаторы, дисплей, внешнее устройство и на жесткий диск, при этом включая сигнал аварии.
При наличии в мобильном устройстве n+1 групп датчиков, на основании анализа событий, зарегистрированных в определенное время, мобильное устройство определяет дополнительные параметры, такие как: размер перемещающегося объекта, а также скорость и направление его передвижения.
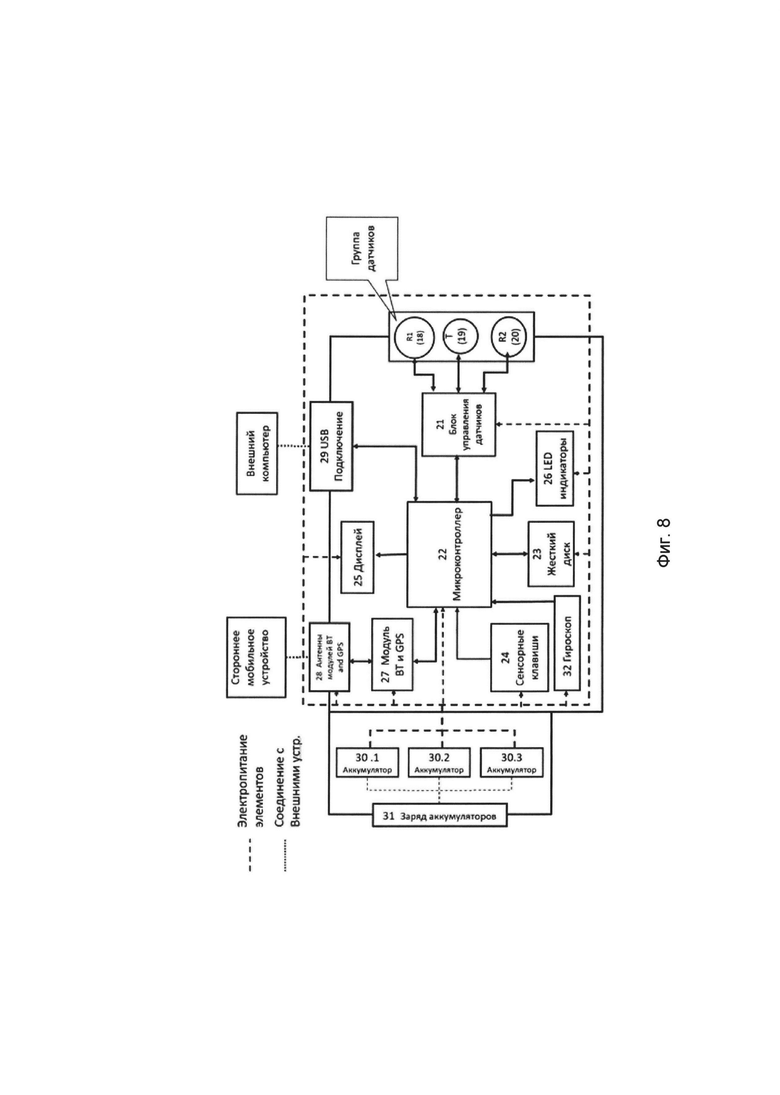
Мобильное устройство состоит из: микроконтроллера с устройством анализа; блока управления датчиками; как минимум одной группы датчиков; жесткого диска; сенсорной клавиатуры; световых индикаторов; дисплея; модуля ВТ и GPS; антенн ВТ и GPS, блока аккумуляторов, гироскопа и внешнего устройства крепления. Блок датчиков связан с микроконтроллером через блок управления датчиков и включает в себя как минимум один датчик передачи и два датчика приема ультразвуковой волны. Датчик передачи расположен между датчиками приема ультразвуковой волны, при этом каждый датчик группы датчиков выполнен с обеспечением возможности обратной связи с блоком управления датчиков. Жесткий диск, сенсорная клавиатура, световые индикаторы, дисплей, модули ВТ и GPS, антенна ВТ и GPS и гироскоп связаны с микроконтроллером. Блок аккумуляторов подает питание на все элементы устройства. Дисплей, световые индикаторы, сенсорная клавиатура и гироскоп имеют одностороннюю связь с микроконтроллером для получения с него информации и отображения и передачи ее. Блок датчиков, жесткий диск, USB порт и модуль Bluetooth ВТ и GPS с антеннами Bluetooth ВТ и GPS выполнены с возможностью обратной связи с микроконтроллером. Мобильное устройство выполнено с обеспечением возможности связи с независимыми внешними устройствами, которое осуществляют посредством связи модуля Bluetooth ВТ с антенной или USB подключения. Внешнее устройство крепления может быть выполнено в виде постоянного магнита либо в виде постоянного магнита с дополнительными крепежными хомутами.
Сущность полезной модели поясняется чертежами:
Фиг. 1. - Общий вид скважины перед цементированием с мобильным устройством
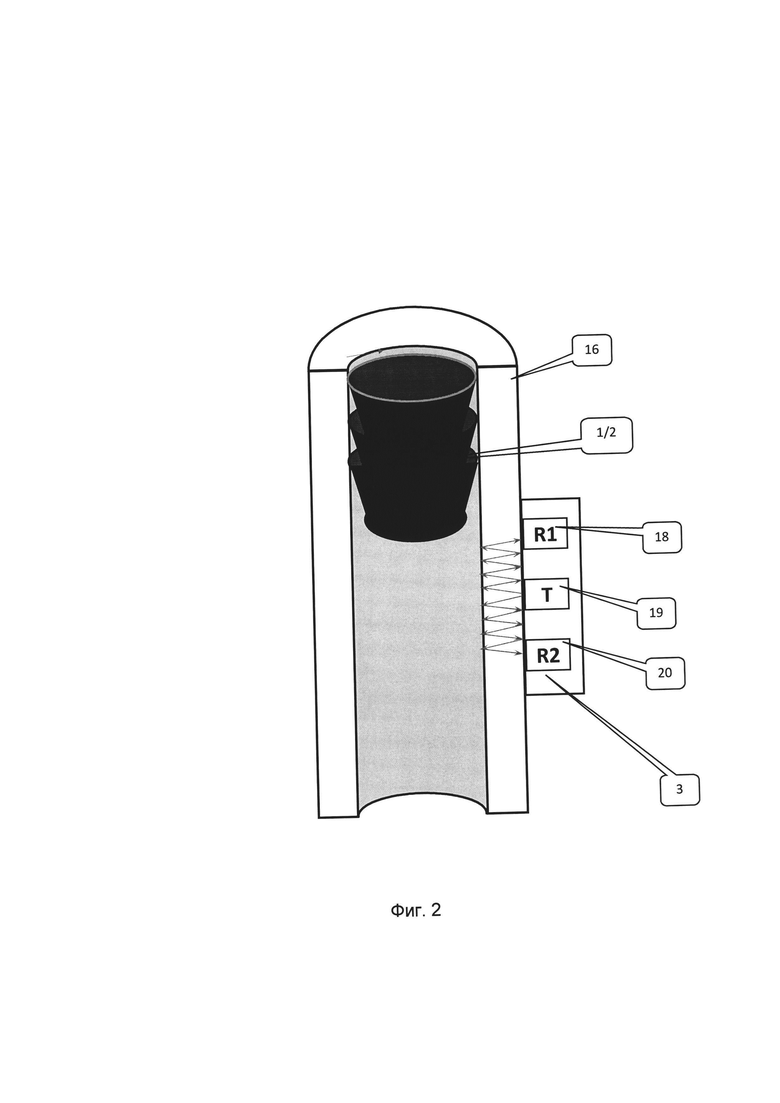
Фиг. 2 - Схема расположения сенсоров и пробки до прохода через зону сенсоров
Фиг. 3 - Схема расположения сенсоров и пробки блокировка сигнала верхнего приемника
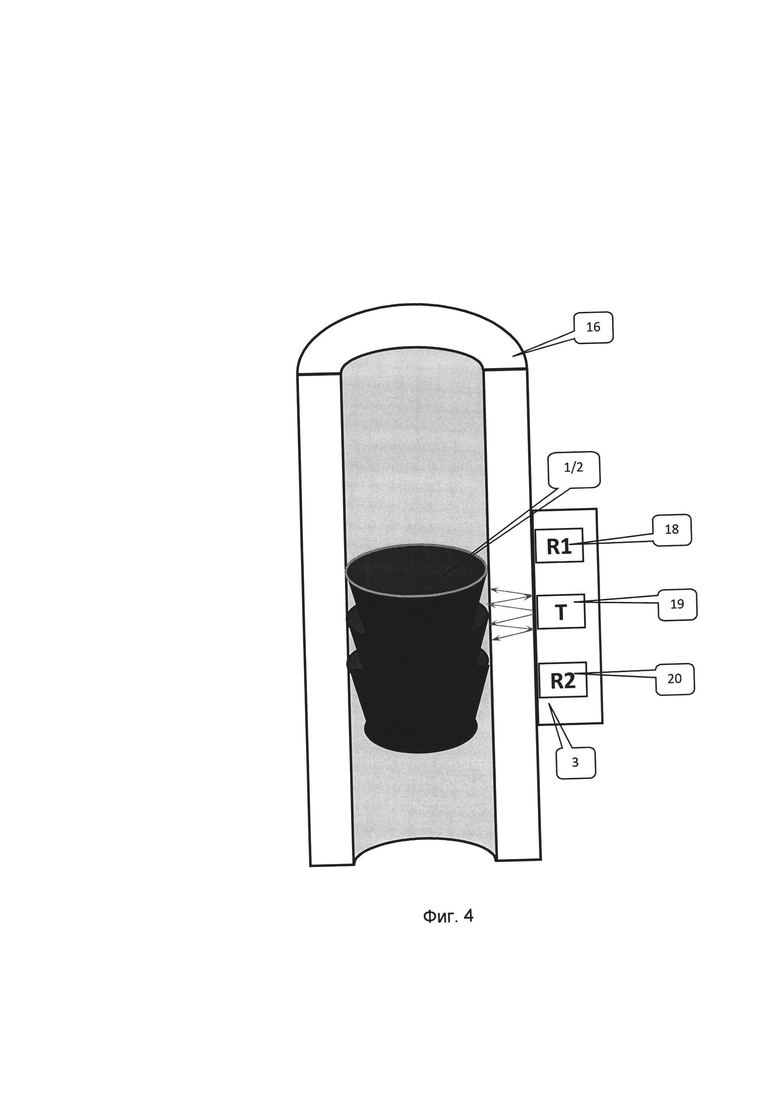
Фиг. 4 - Схема расположения сенсоров и пробки блокировка сигнала обоих приемников
Фиг. 5 - Схема расположения сенсоров и пробки блокировка сигнала верхнего приемника
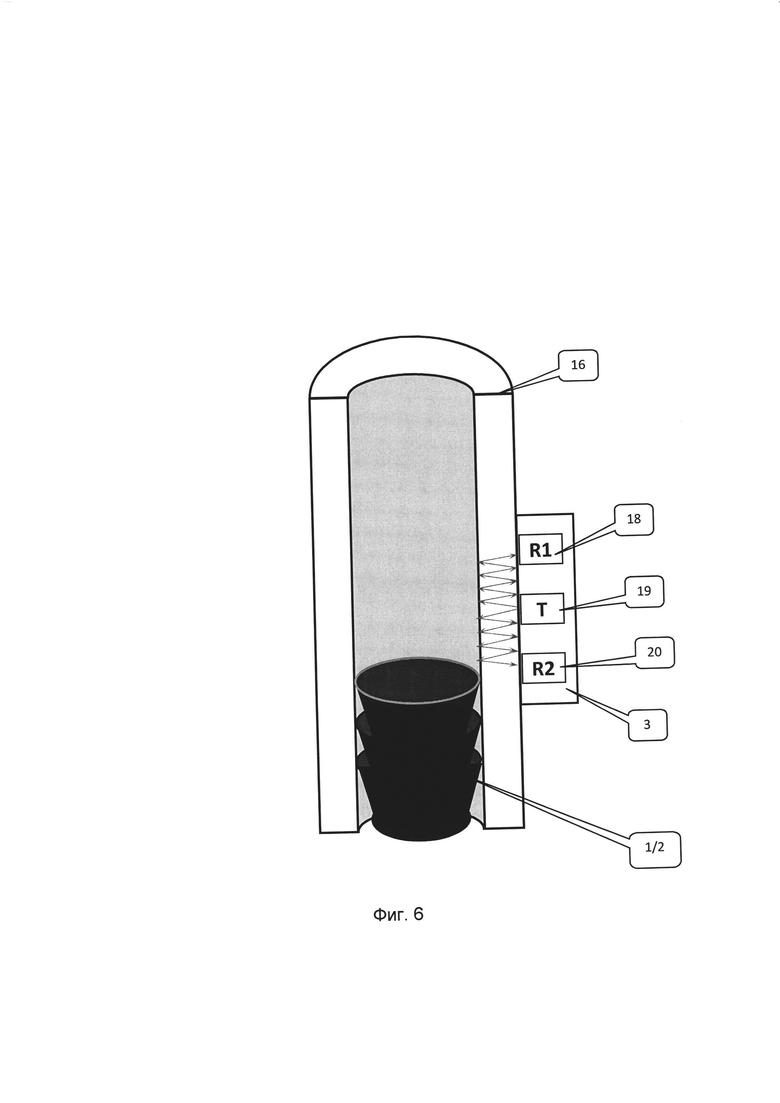
Фиг. 6 - Схема расположения сенсоров и пробки после прохода через зону сенсоров
Фиг. 7.1 - Графическое изображение принимаемого сигнала на приемнике (R1)
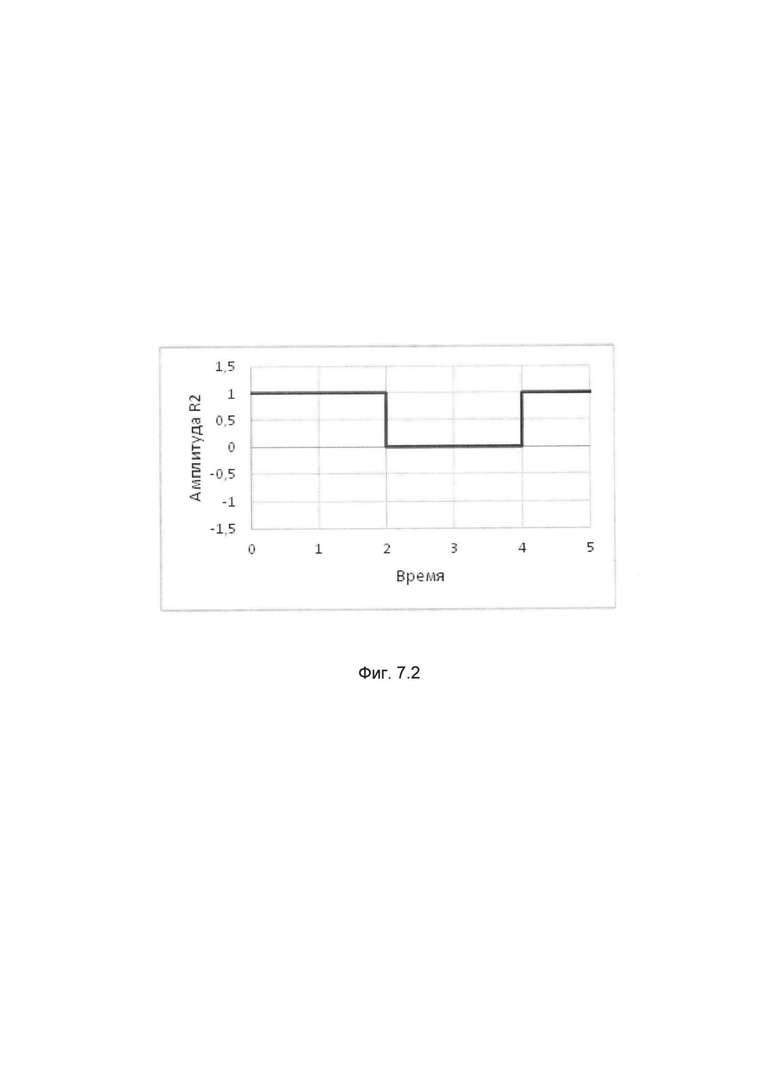
Фиг. 7.2 - Графическое изображение принимаемого сигнала на приемнике (R2)
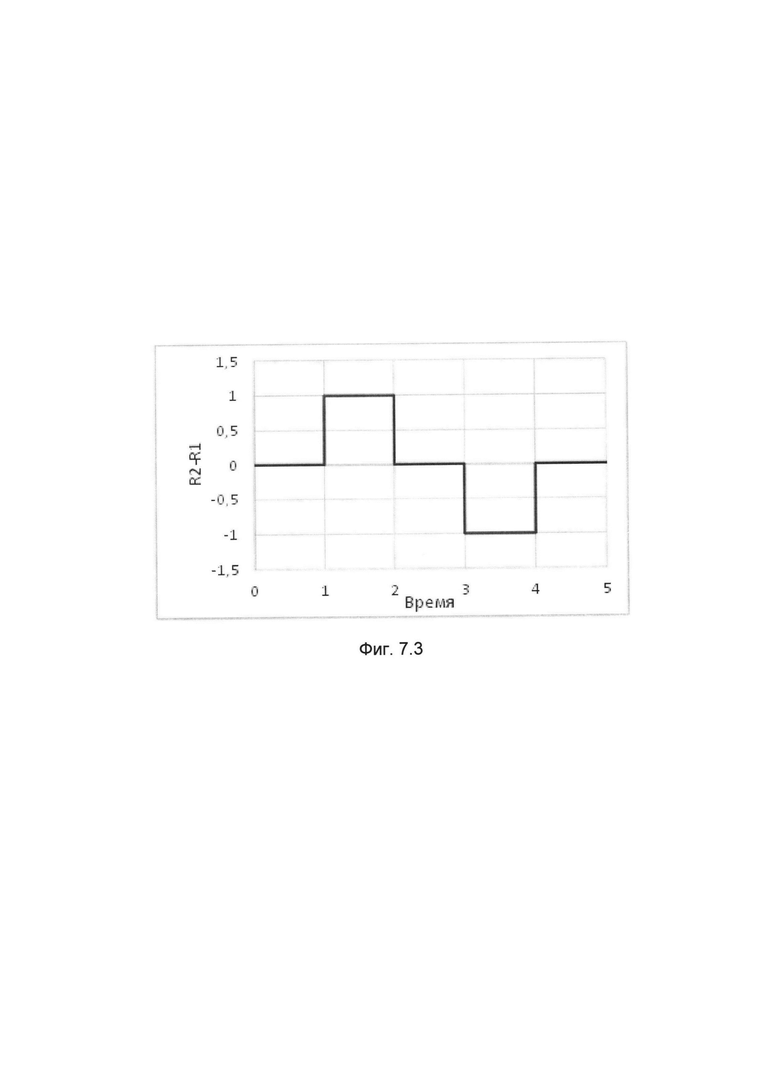
Фиг. 7.3 - Графическое изображение суммирующихся сигналов на (R2-R1)
Фиг. 8 - Блок диаграмма элементов мобильного устройства
Способ определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах включает определение прохода перемещающегося объекта с помощью мобильного устройства (3) в зоне установки мобильного устройства ниже цементировочной головки (9). Предварительно устанавливают параметры работы мобильного устройства (3), такие как, температурный режим окружающей среды, скоростной режим перемещающегося объекта, временной промежуток записи параметров, временное и зональное ориентирование, параметры самокалибровки, частоту и цвет моргания световых элементов. Далее мобильное устройство (3) закрепляют вертикально на внешней поверхности трубы (16) посредством постоянного магнита на уровне ниже цементировочной головки (9). (Фиг 1)
Затем инициируют включение мобильного устройства (3) посредством передачи сигнала с как минимум одной сенсорной клавиши (24) либо с внешнего устройства на микроконтроллер (22). После чего мобильное устройство (3) автоматически производит самокалибровку, которая включает в себя проверку толщины стенки трубы и вертикальность установки мобильного устройства (3) по отношению к трубе (16). После этого микроконтроллер (22) через блок управления датчиков (21) подает сигнал включения как минимум одной группе датчиков (18, 19, 20). Затем датчик передачи ультразвуковых (19) волн начинает излучать внутрь трубы (16) разнонаправленные ультразвуковые волны, а датчики приема (18, 20) начинают принимать эти волны, от внутренней стороны стенки трубы (16). Одновременно с началом работы мобильного устройства (3), группа датчиков (18, 19, 20) отправляет сигнал через блок управления датчиков (21) на микроконтроллер (22), устройство анализа которого, в свою очередь, анализирует этот сигнал и распространяет информацию о нем на индикаторы (26), на внешнее устройство, на дисплей (25), который отображает информацию о запуске работы датчиков и на жесткий диск (23), который начинает запись принятой информации. На момент начала работы группы датчиков (18, 19, 20) оба датчика приема (18, 20), расположенных вертикально с обеих сторон от датчика передачи сигнала (19), принимают ультразвуковые волны с одинаковыми амплитудами, а устройство анализа микроконтроллера (22) сравнивает информацию, поступающую с обоих датчиков приема (18, 20) (Фиг. 1, 2, 8).
Интервал Время <=1 соответствует положению перемещающегося объекта на (Фиг. 2) - когда отсутствуют какие либо перемещающиеся объекты в зоне расположения группы датчиков. Амплитуда сигнала, принимаемого на R1 (18) и R2 (20) одинаковая. Разница между сигналом, полученным на R2 (20) и R1 (18), указывает на отсутствие пробки (Фиг. 2, 7.1, 7.2, 7.3)
В момент, когда перемещающийся объект (1/2) достиг уровня верхнего датчика приема (18), ультразвуковая волна в зоне нахождения перемещающегося объекта (1, 2), перестает отражаться от противоположной стенки трубы (16), а верхний датчик приема (18) перестает получать эту волну, при этом устройство анализа микроконтроллера (22), получившее сигнал с верхнего (18) и нижнего датчика приема (19), анализирует этот сигнал и делает вывод о нахождении перемещающегося объекта (1, 2) в зоне верхнего датчика приема (18). Микроконтроллер (22), используя этот анализ, распространяет информацию о событии на индикаторы (26), и на жесткий диск (23) (Фиг. 1, 3, 8).
Интервал 1<Время<2 соответствует положению перемещающегося объекта на (Фиг. 3) - когда нижняя часть перемещающегося объекта (1/2) проходит верхний датчик приема R1 (18). Амплитуда сигнала, принимаемого на R1 (18) уменьшается, а на R2 (20) остается без изменений. Разница между сигналом, полученным на датчики приема R2 (20) и R1 (18), указывает на присутствие перемещающегося объекта между датчиком приема R1 (18) и датчиком передачи Т(19) (Фиг. 3, 7.1, 7.2, 7.3)
Затем перемещающийся объект (1/2) входит в зону нижнего датчика приема (20), в результате чего оба датчика приема (18, 20) перестают получать отраженную ультразвуковую волну и сигнал об этом передают на микроконтроллер (22), устройство анализа, которого анализирует этот сигнал и делает вывод о нахождении перемещающегося объекта в зоне верхнего (18) и нижнего датчиков приема (19). Микроконтроллер (22), распространяет информацию о произошедшем событии на индикаторы (26) и на жесткий диск (23) (Фиг. 1, 4, 8).
Интервал 2<Время<3 соответствует положению перемещающегося объекта на (Фиг. 4) - когда перемещающийся объект (1/2) продолжает перемещаться вниз и блокирует прием сигнала на обоих датчиках приема R1 (18), R2 (20). Амплитуда сигнала, принимаемого датчиками приема R1 (18) и R2 (20) становиться нулевой. Разница между сигналом, полученным датчиками приема R2 (20) и R1 (18), указывает на присутствие перемещающегося объекта в зоне датчиков приема R1 (18) и R2 (20) (Фиг. 4, 7.1, 7.2, 7.3)
Когда перемещающийся объект (1/2) покидает зону верхнего датчика приема (18), верхний датчик приема (18) начинает получать ультразвуковую волну и передает сигнал об этом на микроконтроллер (22). Устройство анализа микроконтроллера, в свою очередь, получив сигнал с верхнего (18) и нижнего датчика приема (20), анализирует его и делает вывод о нахождении перемещающегося объекта (1/2) только в зоне нижнего датчика приема (20). После чего микроконтроллер (22) распространяет информацию о событии на индикаторы (26) и на жесткий диск (23) (Фиг. 1, 5, 8).
Интервал 3<Время<4 соответствует положению перемещающегося объекта на (Фиг. 5) - когда верхняя часть перемещающегося объекта (1/2) прошла верхний интервал между датчиком приема R1 (18) и датчиком передачи Т (19) но все еще присутствует в зоне датчика приема R2 (20). Амплитуда сигнала, принимаемого датчиком приема R1 (18) возвращается к исходному значению, а на датчике приема R2 (20) остается без изменений и близкой к нулю. Разница между сигналом, полученным датчиками приема R2 (20) и R1 (18), указывает на присутствие перемещающегося объекта в интервале датчиков приема R2 (20) и Т(19) (Фиг. 5, 7.1, 7.2, 7.3)
Далее перемещающийся объект (1/2) проходит уровень нижнего датчика приема (20). В этот момент нижний датчик приема (20) снова начинает получать ультразвуковую волну и подает сигнал на микроконтроллер (22). Устройство анализа микроконтроллера, в свою очередь, сравнивая сигналы, поступившие с верхнего (18) и нижнего датчиков приема (20), делает вывод о выходе перемещающегося объекта из зоны группы датчиков (18, 19, 20). Микроконтроллер (22) распространяет информацию о совершившемся событии на индикаторы (26), дисплей (25), внешнее устройство и на жесткий диск (23). После чего устройство анализа микроконтроллера делает вывод о факте прохождения перемещающегося объекта (1/2) зоны расположения мобильного устройства (3) и передает эту информацию на индикаторы (26), дисплей (25), на внешнее устройство и на жесткий диск (23) (Фиг. 1, 6, 8).
Интервал Время >=4 соответствует положению перемещающегося объекта на (Фиг. 6) - когда отсутствуют какие либо перемещающиеся объекты в зоне расположения группы датчиков. Амплитуда сигнала, принимаемого датчиками приема R1 (18) и R2 (20) одинаковая. Разница между сигналом, полученным датчиками приема R2 (20) и R1 (18), указывает на отсутствие перемещающегося объекта (1/2) в зоне расположения группы датчиков (Фиг. 6, 7.1, 7.2, 7.3)
В случае когда устройство анализа микроконтроллера, настроенное на заданные параметры, в течении заданного времени не получает сигналы с датчиков приема (18, 19, 20) о возобновлении получения ультразвуковой волны, устройство анализа микроконтроллера (22) делает вывод о наступлении аварийной ситуации. Микроконтроллер (22), используя анализ о событии, распространяет информацию на индикаторы (26), дисплей (25), внешнее устройство и на жесткий диск (23), при этом включая сигнал аварии.
При наличии в мобильном устройстве (3) n+1 групп датчиков (18, 19, 20), на основании анализа событий, зарегистрированных в определенное время, мобильное устройство (3) определяет дополнительные параметры, такие как: размер перемещающегося объекта (1/2), а также скорость и направление его передвижения.
Мобильное устройство (3) включает в себя следующие элементы: Микроконтроллер (22) на котором принимается и обрабатываются данные от блока управления датчиков (21) который управляет группой датчиков, которые состоят из одного передатчика Т (19) и двух приемников R1 (18) и R2 (20), жесткой диск (23) на котором сохраняются все данные, сенсорные клавиши (24) расположенные на внешней стороне устройства позволяют вносить информацию о работе и устанавливать количество событий для фиксации, дисплей (25) служит для отображения информации а также LED индикаторы (26) сигнализирующие о возникновения событий и состоянии прибора, Модуль радиоканала (Bluetooth) и GSM приемник (27), антенны для Bluetooth и GSM (28) расположенные на лицевой стороне прибора, гнездо для подключения внешнего компьютера по USB кабелю (29), блок аккумуляторных батарей (30.1-30.3) питающие все элементы устройства, гнездо для заряда аккумуляторных батарей (31) и гироскоп (32) (Фиг. 8)
Мобильное устройство (3) состоит из: микроконтроллера (22) с устройством анализа; блока управления датчиками (21); как минимум одной группы датчиков (18б 19б 20); жесткого диска (23); сенсорной клавиатуры (24); световых индикаторов (26); дисплея (25); модуля ВТ и GPS (27); антенн ВТ и GPS (28), блока аккумуляторов (30.1, 30.2, 30.3), гироскопа (32) и внешнего устройства крепления. Блок датчиков (18, 19, 20) связан с микроконтроллером (22) через блок управления датчиков (21) и включает в себя как минимум один датчик передачи (19) и два датчика приема ультразвуковой волны (18, 20). Датчик передачи (19) расположен между датчиками приема ультразвуковой волны (18, 20), при этом каждый датчик группы датчиков (18/19/20) выполнен с обеспечением возможности обратной связи с блоком управления датчиков (21). Жесткий диск (23), сенсорная клавиатура (24), световые индикаторы (26), дисплей (25), модули ВТ и GPS (27), антенна ВТ и GPS (28) и гироскоп (32) связаны с микроконтроллером (22). Блок аккумуляторов (30.1, 30.2, 30.3) подает питание на все элементы устройства. Дисплей (25), световые индикаторы (26), сенсорная клавиатура (24) имеют одностороннюю связь с микроконтроллером (22) для получения с него информации и отображения и передачи ее. Блок датчиков (18, 19, 20), жесткий диск (23), USB порт (29) и модуль ВТ и GPS (27) с антеннами ВТ и GPS (28) и гироскоп (32) выполнены с возможностью обратной связи с микроконтроллером (22). Мобильное устройство (3) выполнено с обеспечением возможности связи с независимыми внешними устройствами, которое осуществляют посредством связи модуля Bluetooth ВТ с антенной или USB подключения. Внешнее устройство (3) крепления может быть выполнено в виде постоянного магнита либо в виде постоянного магнита с дополнительными крепежными хомутами (Фиг. 1, 8).
Мобильное устройство для определения прохождения перемещающегося объекта в нефтяных и водных скважинах прошло успешные испытания, что подтверждает промышленную применимость предлагаемого способа и устройства.
Преимущества перед прототипом:
1. Отсутствие необходимости конструктивных изменений в цементной головке
2. Отсутствие необходимости устанавливать радиочастотные метки на пробках
2.3. Способность определять скорость движения перемещаемого объекта
Все вышесказанное говорит о выполнении поставленной технической задачи и о промышленной применимости заявленного устройства.
Перечень позиций:
1 Перемещающийся объект сверху
2 Перемещающийся объект снизу
3 Мобильное устройство
4 Нижний удерживающий штырь
5 Верхний удерживающий штырь
6 Задвижка
7 Насос
8 Линия высокого давления
9 Цементировочная головка
10 Быстросъемное соединение
11 Индикатор прохода пробки
12 Центральный обратный клапан
13 Башмак
14 Межколонное пространство
15 Уровень стола ротора
16 Обсадная колонна
17 Уровень земли
18 Датчик приема - R1
19 Датчик передачи - Т
20 Датчик приема - R2
21 Блок управления датчиков
22 Микроконтроллер
23 Жесткий диск
24 Сенсорные клавиши
25 Дисплей
26 LED индикаторы
27 Модули ВТ и GPS
28 Антенны модулей ВТ и GPS
29 USB подключение
30 30.1-30.3 Аккумулятор
31 Заряд аккумуляторов
32 Гироскоп
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения положения сбрасываемой цементировочной пробки в обсадной колонне | 2022 |
|
RU2805636C1 |
| Радиоканальная система кардиомониторинга, предупреждения и действий в критических ситуациях | 2016 |
|
RU2630126C1 |
| СИСТЕМЫ И СПОСОБЫ ИНТЕРПРЕТИРОВАНИЯ С ПОДДЕРЖАНИЕМ АНОНИМНОСТИ ПРОИЗВОДСТВЕННОЙ ДЕЯТЕЛЬНОСТИ В ПРИМЕНЕНИИ К БУРОВЫМ УСТАНОВКАМ | 2012 |
|
RU2613218C2 |
| Контейнер для хранения и транспортировки проб биологических объектов | 2017 |
|
RU2734272C2 |
| СПОСОБ СТРОИТЕЛЬСТВА СКВАЖИНЫ В СЛОЖНЫХ ГОРНО-ГЕОЛОГИЧЕСКИХ УСЛОВИЯХ БУРЕНИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2531409C1 |
| Устройство для измерения параметров морской волны | 2017 |
|
RU2689539C1 |
| ТРУБОПРОВОДНЫЙ ДИАГНОСТИЧЕСКИЙ РОБОТ | 2018 |
|
RU2707644C1 |
| Способ для продвижения товаров покупателям на основе анализа данных и действий пользователя, регистрируемых интерактивным зеркалом | 2018 |
|
RU2686033C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ОБНАРУЖЕНИЯ В СКВАЖИНЕ ОБЪЕКТОВ, ОТРАЖАЮЩИХ ГИДРАВЛИЧЕСКИЙ СИГНАЛ | 2016 |
|
RU2709853C1 |
| ТЕРМИНАЛ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2537892C1 |




Использование: для определения прохода перемещающегося объекта с помощью мобильного устройства в зоне установки мобильного устройства ниже цементировочной головки. Сущность изобретения заключается в том, что мобильное устройство закрепляют вертикально на внешней поверхности трубы посредством постоянного магнита на уровне ниже цементировочной головки. Затем инициируют включение мобильного устройства посредством передачи сигнала на микроконтроллер. Микроконтроллер через блок управления датчиков подает сигнал включения группе датчиков. Затем датчик передачи ультразвуковых волн начинает излучать внутрь трубы разнонаправленные ультразвуковые волны, а датчики приема начинают принимать эти волны, отраженные от внутренней стороны стенки трубы. Одновременно с началом работы мобильного устройства группа датчиков отправляет сигнал через блок управления датчиков на микроконтроллер, устройство анализа которого, в свою очередь, анализирует этот сигнал и распространяет информацию о нем на индикаторы, на внешнее устройство, на дисплей, который отображает информацию о запуске работы датчиков и на жесткий диск, который начинает запись принятой информации. Устройство анализа микроконтроллера, получив сигнал с верхнего и нижнего датчиков приема, анализирует его и делает вывод о прохождении перемещающегося объекта. Технический результат: обеспечение возможности повышения достоверности определения прохождения разделительной или продавочной пробки в скважине при выполнении операции по цементированию. 2 н. и 5 з.п. ф-лы, 10 ил.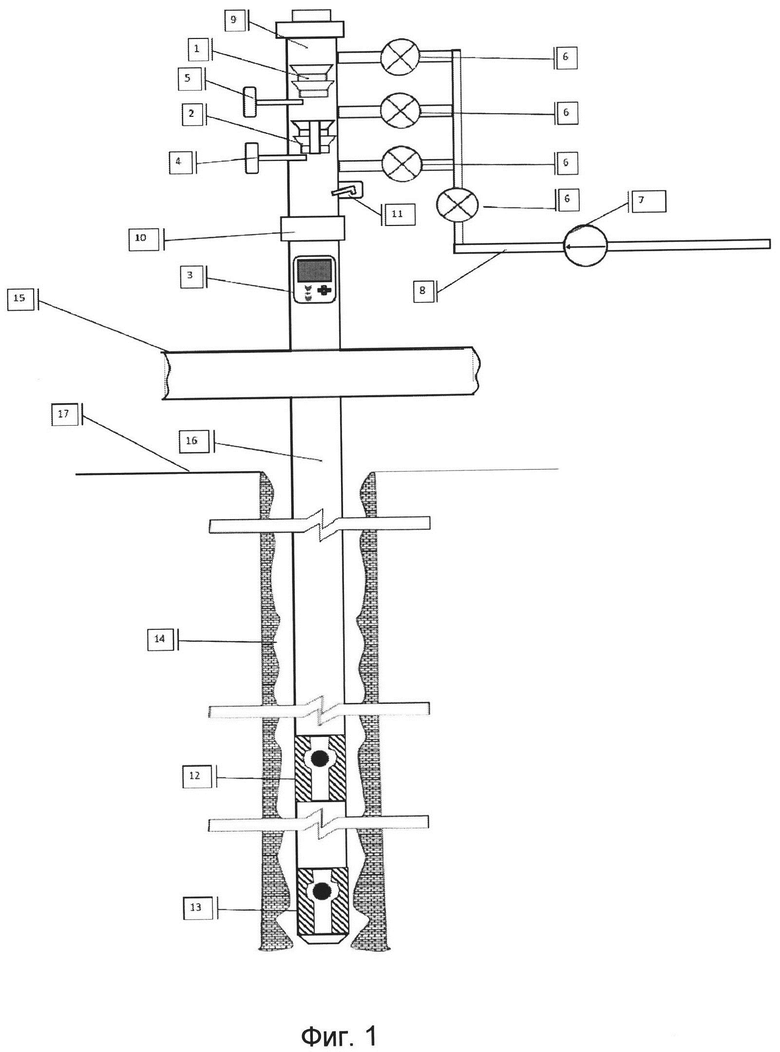
1. Способ определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах, включающий определение прохода перемещающегося объекта с помощью мобильного устройства в зоне расположения мобильного устройства ниже цементировочной головки, отличающийся тем, что
устанавливают параметры работы мобильного устройства, а именно: температурный режим, скоростной режим, временной промежуток записи параметров, временное и зональное ориентирование, параметры самокалибровки, частоту и цвет моргания световых элементов, после чего мобильное устройство закрепляют вертикально на внешней поверхности трубы посредством постоянного магнита на уровне ниже цементировочной головки, затем инициируют включение мобильного устройства посредством передачи сигнала на микроконтроллер, после чего мобильное устройство автоматически производит самокалибровку, которая включает: проверку толщины стенки трубы и вертикальность установки мобильного устройства по отношению к трубе, после этого микроконтроллер через блок управления датчиков подает сигнал включения как минимум одной группе датчиков, состоящей из двух датчиков приема и одного датчика передачи ультразвуковых волн, затем датчик передачи ультразвуковых волн начинает излучать внутрь трубы разнонаправленные ультразвуковые волны, а датчики приема ультразвуковых волн начинают принимать отраженные от внутренней стороны стенки трубы ультразвуковые волны; одновременно с началом работы, группа датчиков отправляет сигнал через блок управления датчиков на микроконтроллер, устройство анализа которого, в свою очередь, анализирует этот сигнал и распространяет информацию о нем на индикаторы, на внешнее устройство, на дисплей, который отображает информацию о запуске работы датчиков, и на жесткий диск, который начинает запись принятой информации; на момент начала работы группы датчиков оба датчика приема, расположенных вертикально сверху и снизу с обеих сторон от датчика передачи сигнала, принимают ультразвуковые волны, отраженные от внутренней стороны стенки трубы с одинаковыми амплитудами, а устройство анализа микроконтроллера сравнивает информацию, поступающую с обоих датчиков приема; причем в момент, когда перемещающийся объект достиг уровня верхнего датчика приема, ультразвуковая волна в зоне нахождения перемещающегося объекта, перестает отражаться от внутренней стороны стенки трубы, а верхний датчик приема перестает получать отраженную от внутренней стороны стенки трубы ультразвуковую волну, устройство анализа микроконтроллера, получившее сигнал через блок управления датчиков с верхнего и нижнего датчиков приема, анализирует этот сигнал с верхнего и нижнего датчиков приема, и делает вывод о нахождении перемещающегося объекта в зоне верхнего датчика приема, микроконтроллер, используя этот анализ, распространяет информацию о событии на индикаторы и на жесткий диск, который записывает принятую информацию, затем перемещающийся объект входит и в зону нижнего датчика приема, в результате чего оба датчика приема перестают получать отраженную от внутренней стороны стенки трубы ультразвуковую волну, а сигнал об этом оба датчика приема передают на микроконтроллер через блок управления датчиков, устройство анализа микроконтроллера анализирует этот сигнал с верхнего и нижнего датчиков приема и делает вывод о нахождении перемещающегося объекта в зоне верхнего и нижнего датчиков приема, а микроконтроллер, используя этот анализ, распространяет информацию о событии на индикаторы и на жесткий диск, который записывает принятую информацию, когда перемещающийся объект покидает зону верхнего датчика приема, верхний датчик приема начинает получать отраженную от внутренней стороны стенки трубы ультразвуковую волну и передает сигнал об этом на микроконтроллер через блок управления датчиков, устройство анализа микроконтроллера, в свою очередь, получив этот сигнал с верхнего и нижнего датчиков приема, анализирует его и делает вывод о нахождении перемещающегося объекта в зоне нижнего датчика приема, после чего микроконтроллер, используя этот анализ, распространяет информацию о событии на индикаторы и на жесткий диск, который записывает принятую информацию, после этого перемещающийся объект проходит уровень нижнего датчика приема, в этот момент нижний датчик приема снова начинает получать отраженную от внутренней стороны стенки трубы ультразвуковую волну и подает сигнал на микроконтроллер через блок управления датчиками, устройство анализа микроконтроллера, в свою очередь, сравнивая сигналы, поступившие с верхнего и нижнего датчиков приема, делает вывод о выходе перемещающегося объекта из зоны группы датчиков, а микроконтроллер, используя анализ о событии, распространяет информацию о событии на индикаторы, дисплей, внешнее устройство и на жесткий диск, который записывает принятую информацию, после чего устройство анализа микроконтроллера делает вывод о прохождении перемещающегося объекта зоны расположения мобильного устройства, а микроконтроллер, в свою очередь, распространяет информацию о факте прохождения перемещающегося объекта зоны расположения мобильного устройства на индикаторы, дисплей, который отображает полученную информацию, на внешнее устройство и на жесткий диск, который записывает принятую информацию.
2. Способ определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах по п. 1, отличающийся тем, что в случае, когда устройство анализа микроконтроллера мобильного устройства, настроенное на заданные параметры, в течение заданного времени не получает сигналы через блок управления датчиков с верхнего, либо нижнего, либо с обоих датчиков приема о возобновлении получения ультразвуковой волны, отраженной от внутренней стороны стенки трубы, устройство анализа микроконтроллера делает вывод о наступлении аварийной ситуации, а микроконтроллер, в свою очередь, используя анализ о событии, распространяет информацию о событии на индикаторы, дисплей, внешнее устройство и на жесткий диск, который записывает принятую информацию, при этом включая сигнал аварии.
3. Способ определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах по п. 1, отличающийся тем, что при наличии в мобильном устройстве n+1 групп датчиков, на основании анализа событий, зарегистрированных в определенное время, мобильное устройство определяет дополнительные параметры: размер перемещающегося объекта, а также скорость и направление его передвижения.
4. Мобильное устройство состоит из: микроконтроллера с устройством анализа; блока управления датчиками; как минимум одной группы датчиков; жесткого диска; сенсорной клавиатуры; световых индикаторов; дисплея; модуля ВТ и GPS; антенн ВТ и GPS, блока аккумуляторов, гироскопа и внешнего устройства крепления, при этом блок датчиков связан с микроконтроллером через блок управления датчиков и включает в себя датчик передачи и два датчика приема ультразвуковой волны, а датчик передачи расположен между датчиками приема ультразвуковой волны, при этом каждый датчик группы датчиков выполнен с обеспечением возможности обратной связи с блоком управления датчиков, а жесткий диск; сенсорная клавиатура; световые индикаторы; дисплей; модули Bluetooth ВТ и GPS; антенна Bluetooth ВТ и GPS и гироскоп связаны с микроконтроллером; причем блок аккумуляторов подает питание на все элементы устройства, при этом дисплей, световые индикаторы, сенсорная клавиатура и гироскоп имеют одностороннюю связь с микроконтроллером для получения с него информации отображения и передачи ее, а блок датчиков, жесткий диск, USB порт и модуль Bluetooth ВТ и GPS с антеннами Bluetooth ВТ и GPS выполнены с возможностью обратной связи с микроконтроллером, при этом мобильное устройство выполнено с обеспечением возможности связи с независимыми внешними устройствами.
5. Мобильное устройство для осуществления способа определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах по п. 4, отличающееся тем, что связь мобильного устройства с внешними независимыми устройствами осуществляют посредством связи модуля Bluetooth ВТ с антенной или USB подключения.
6. Мобильное устройство для осуществления способа определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах по п. 4, отличающееся тем, что внешнее устройство крепления выполнено в виде постоянного магнита.
7. Мобильное устройство для осуществления способа определения прохождения перемещающихся объектов в нефтяных, газовых и водных скважинах по п. 4, отличающееся тем, что внешнее устройство крепления выполнено в виде постоянного магнита с дополнительными крепежными хомутами.
| US 6597175 B1, 22.07.2003 | |||
| US 4468967 A, 04.09.1984 | |||
| WO 2016186612 A1, 24.11.2016 | |||
| US 7219730 B2, 01.04.2004 | |||
| СПОСОБ ФОРМИРОВАНИЯ БЛОКИРУЮЩЕЙ ПРОБКИ В СКВАЖИНЕ | 2009 |
|
RU2421599C1 |
| СПОСОБ ИЗОЛЯЦИИ ПРОДУКТИВНОГО ПЛАСТА ПРИ ЦЕМЕНТИРОВАНИИ ОБСАДНОЙ КОЛОННЫ | 2006 |
|
RU2330933C1 |

