Изобретение относится к устройствам автоматической и автоматизированной диагностики объектов, например, газо- и нефтепроводов.
Известны и широко применяются различные устройства диагностики трубопроводного транспорта нефти, газа, химических смесей и др. Обзор самоходных систем видео диагностики трубопроводов представлен, например, на сайте https://vistaros.ru/stati/teleinspektsiya-truboprovodov/robotizirovannaya-teleinspektsiya.html (июль, 2018). Существенным признаком этих устройств является то, что дистанционно управляется робототехническая система, содержащая материнскую платформу, контроллер управления приводом движения колеса и видеокамеру [1, 2]. Управление роботом осуществляется с пульта управления, который может принимать изображение и передавать управляющие команды. Известные диагностические роботы, как правило, связаны с пультом управления кабельной связью.
В качестве прототипа рассмотрим устройство в виде наземного дрона для проверки трубопроводов, выполненное в виде транспортной тележки с блоком управления, видеокамерой и блоком подсветки на светодиодах [3].
Недостатки устройства заключаются в невозможности перемещения по трубопроводу (трубе), точного и быстрого определения места устройства, отсутствует функция разметки опасной территории, повреждений трубы и устранения повреждений трубы, радиационного анализа территорий, невозможности определения взрывчатых веществ, измерения толщины трубы, контактного определения механических препятствий и преодоления препятствий в пространстве, шифрования передаваемой информации.
Технической задачей является создание диагностического устройства (робота) с улучшенными функциональными возможностями за счет повышения быстродействия при определении координат, оперативности и маневренности, точности устранения повреждений, реализации автоматического и автоматизированного режимов работы, возможности оценки толщины трубы, определения и преодоления препятствий, способности распознавать звуковую и визуальную информацию (изображения), возможности оценки мест размещения взрывчатых веществ и длительного функционирования без подзарядки аккумуляторов.
Задача решается тем, что заявленное устройство имеет в своем составе движимую материнскую платформу с ведущими колесами и приводами ведущих колес, видеокамеру, детектор газа, блок подсветки, пульт управления роботом и источники электропитания.
Новыми являются следующие признаки: упомянутая материнская платформа 2 оборудована аэродинамической платформой АП 1, включающей поддерживающее колесо ПК 8 с приводом поддерживающего колеса, аэропривод горизонтальной стабилизации левый АГСЛ 6 с пропеллером 45, аэропривод горизонтальной стабилизации правый АГСП 9 с пропеллером 45 и контроллер управления приводами стабилизации и поддерживающего колеса КУПС 5. Трубопроводный диагностический робот (ТДР) по изобретению содержит навесное оборудование, необходимое для получения и обработки информации, и оборудование для управления и выполнения поставленных задач в составе: микроконтроллер управления МУ 10; нейро-распознаватель HP 11; автопилот 16; определитель координат GPS/ГЛОНАСС ОК 37; блок стабилизации БС 19; гироскоп 17; акселерометр 18; блок управления навесным оборудованием БУНО 20; локатор 21; анализатор звука АЗ 26; тепловизор 28; прибор ночного видения ПНВ 27; цветная 3D видеокамера ЦВ 25; тактильный датчик ТД 7; измеритель толщины трубы ИТТ 38; высотомер 23; магнитометр 24; прибор радиационной и химической разведки ПРХР 22; блок распознавания химических утечек БРХУ 12; сигнализатор химических утечек СХУ 13; блок разметки повреждений БРП 14; блок устранения утечек БУУ 15; первый приемопередатчик ППП 29; второй приемо-передатчик ВПП 30; блок шифрования БШ 35; компьютеризированное рабочее место инженера КРМИ 31; компьютеризированное рабочее место пилота КРМП 32; цифровой блок телеметрии ЦБТ 33; антенный блок с автотрекером АБА 34. Стационарная часть устройства и мобильная его часть оборудованы универсальным стационарным блоком питания УСБП 39 и универсальным мобильным блоком питания УМБП 40, оба они могут иметь систему подзарядки; Микроконтроллер управления МУ 10 совместно с нейро-распознавателем HP 11 является интеллектуальной основой всего устройства. МУ 10 отдельными двунаправленными линиями связи подключен к контроллеру управления приводом движения КУПД 4, к контроллеру управления приводами стабилизации и поддерживающего колеса КУПС 5, к блоку управления навесным оборудованием БУНО 20, к определителю координат GPS/ГЛОНАСС ОК 37, к автопилоту 16, к нейро-распознавателю HP 11, к блоку распознавания химических утечек БРХУ 12, к первому приемо-передатчику ППП 29 и к блоку стабилизации БС 19. Упомянутый блок стабилизации БС 19, в свою очередь, подключен двунаправленными линиями связи к гироскопу 17 и акселерометру 18. Упомянутый блок управления навесным оборудованием БУНО 20, в свою очередь, подключен двунаправленными линиями связи к прибору радиационной и химической разведки ПРХР 22, высотомеру 23, магнитометру 24, измерителю толщины трубы ИТТ 38, тактильному датчику ТД 7, цветной 3D видеокамере ЦВ 25, прибору ночного видения ПНВ 27, тепловизору 28, анализатору звука АЗ 26 и локатору 21. Упомянутый блок распознавания химических утечек БРХУ 12, в свою очередь, соединен двунаправленными линиями связи с сигнализатором химических утечек СХУ 13, блоком разметки повреждений БРП 14 и блоком устранения утечек БУУ 15. Упомянутый контроллер управления приводами стабилизации и поддерживающего колеса КУПС 5, в свою очередь, подключен к приводу поддерживающего колеса ПК 8, аэроприводу горизонтальной стабилизации левому АГСЛ 6 и аэроприводу горизонтальной стабилизации правому АГСП 9. Привод движения КУПД 4, в свою очередь, подключен к приводу ведущего колеса 3, а упомянутые мобильные элементы 1-29, 37-38 подключены к универсальному мобильному блоку питания УМБП 40, при этом первый приемопередатчик ППП 29 подключен двунаправленной линией связи ко второму (стационарному) приемопередатчику ВПП 30, который, в свою очередь, соединен двунаправленной линией связи с блоком шифрования БШ 35. Компьютеризированное рабочее место инженера КРМИ 31 подключено двунаправленными линиями связи к универсальному пульту управления роботом УПУР 36, цифровому блоку телеметрии ЦБТ 33, антенному блоку с автотрекером АБА 34, блоку шифрования БШ 35, и через универсальный пульт управления роботом УПУР 36 связано с компьютеризированным рабочим местом пилота КРМП 32. Упомянутое компьютеризированное рабочее место пилота КРМП 32, в свою очередь, подключено двунаправленными линиями связи к антенному блоку с автотрекером АБА 34, цифровому блоку телеметрии ЦБТ 33, блоку шифрования БШ 35 и универсальному пульту управления роботом УПУР 36. Упомянутый универсальный пульт управления роботом УПУР 36, в свою очередь, подключен двунаправленными линиями связи к антенному блоку с автотрекером АБА 34 и цифровому блоку телеметрии ЦБТ 33, а упомянутые элементы 30-36 подключены к универсальному стационарному блоку питания 39.
При конкретной реализации устройства прибор ночного видения может быть выполнен в виде телевизионной камеры, содержащей инфракрасный прожектор и функционирующей в инфракрасном оптическом диапазоне.
Кроме того, тепловизор может быть выполнен в виде телевизионной камеры, воспринимающей и отображающей тепловой портрет объекта контроля.
Кроме того, цветная 3D видеокамера может быть выполнена в виде двух приемников оптического диапазона, которые могут восстанавливать трехмерное цветное изображение объекта контроля.
Кроме того, локатор может состоять из сканирующего лучевого излучателя, приемника, отображателя полученной информации и интерфейса связи с потребителем информации.
Кроме того, блок распознавания химических утечек может быть выполнен в виде детектора (распознавателя) химических веществ и газа.
Кроме того, сигнализатор химических утечек может быть выполнен в виде звукового и электронного сигнализатора на экране дисплея.
Кроме того, блок разметки повреждений может быть выполнен в виде пульверизатора с красителем и механизма нажатия кнопки пульверизатора.
Кроме того, блок устранения утечек может быть выполнен в виде пульверизатора с химическим наполнителем и механизма нажатия кнопки пульверизатора.
Кроме того, блок управления навесным оборудованием содержит синхронизатор включения последовательности работы приборов и блок управления положением приборов съема информации и передачи ее потребителю.
Кроме того, аэроприводы горизонтальной стабилизации левый и правый могут быть выполнены в виде двигателя, редуктора, пропеллера и средства крепления к аэродинамической платформе.
Кроме того, контроллеры управления приводами стабилизации и поддерживающего колеса и контроллер управления приводом движения могут быть выполнены в виде процессора, блока памяти и интерфейса.
Кроме того, микроконтроллер управления может быть выполнен в составе процессора, блока памяти и интерфейса.
Кроме того, первый и второй приемо-передатчики могут быть выполнены в составе преобразователя, шифратора, дешифратора и усилителя.
Кроме того, универсальный пульт управления роботом может содержать процессор, блок памяти, интерфейс и блок ручного управления трубопроводным диагностическим роботом с помощью клавиатуры и джойстика.
Кроме того, компьютеризированное рабочее место пилота может быть выполнено в составе процессора, блока памяти, интерфейса, дисплея и блока ручного управления трубопроводным диагностическим роботом с помощью клавиатуры и джойстика.
Кроме того, компьютеризированное рабочее место инженера может быть выполнено в составе процессора, блока памяти, интерфейса, дисплея, клавиатуры и блока отображения информации об окружающей среде.
Кроме того, нейро-распознаватель может быть выполнен в виде структурно-перестраиваемой архитектуры обобщенного гибридного нейро-нечеткого классификатора на основе интеграции нечеткой клеточной нейронной сети Кохонена и нечеткого многослойного персептрона.
Кроме того, универсальный стационарный блок питания может быть выполнен в виде электрического выпрямителя переменного тока, стабилизатора, аккумулятора, блока подзарядки, комплексного блока солнечной батареи и ветряного мини энергоблока.
Кроме того, универсальный мобильный блок питания может быть выполнен в виде блока подзарядки, аккумулятора, комплексного блока солнечной батареи и ветряного мини энергоблока.
Кроме того, прибор химической разведки может быть выполнен в виде анализатора химического состава атмосферы прилежащей территории.
Кроме того, измеритель толщины трубы может быть выполнен в виде ультразвукового измерителя толщины материала.
Кроме того, тактильный датчик может быть выполнен в виде контактного механического идентификатора.
Кроме того, материнская платформа выполнена составной, передняя и задняя части соединены посредством центральной оси, что обеспечивает поворот передней части платформы относительно задней части на горизонтальных поворотах трубы и адаптацию платформы к горизонтальным поворотам.
Устройство по изобретению иллюстрируется чертежами, представленными на фиг. 1-5.
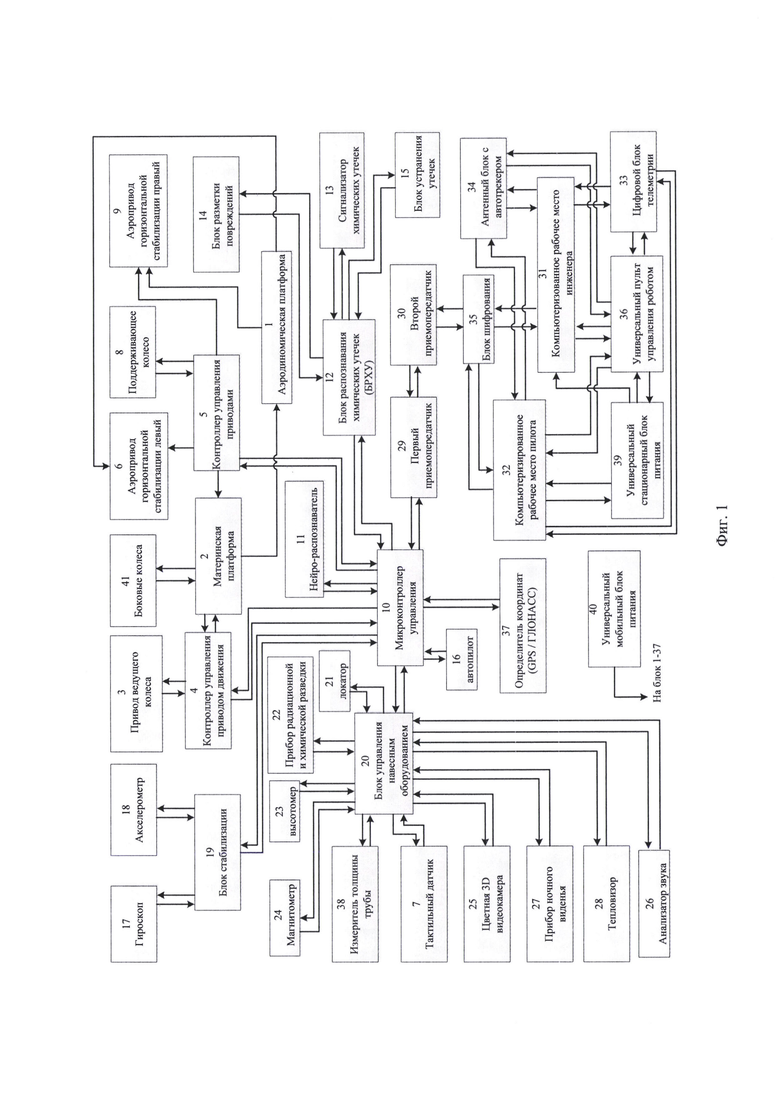
На фиг. 1 представлена структурная схема управления трубопроводным диагностическим роботом.
На фиг. 2 показан внешний вид размещения трубопроводного диагностического робота на трубе.
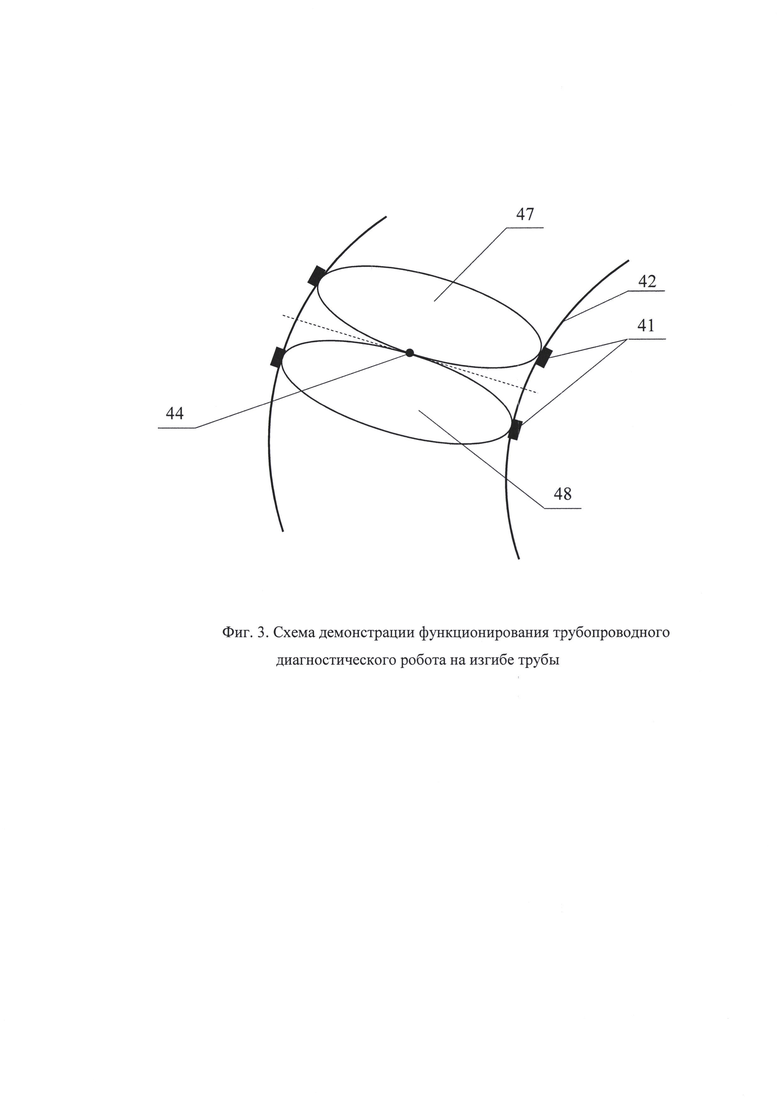
На фиг. 3 приведена схема функционирования трубопроводного диагностического робота на горизонтальном повороте трубы.
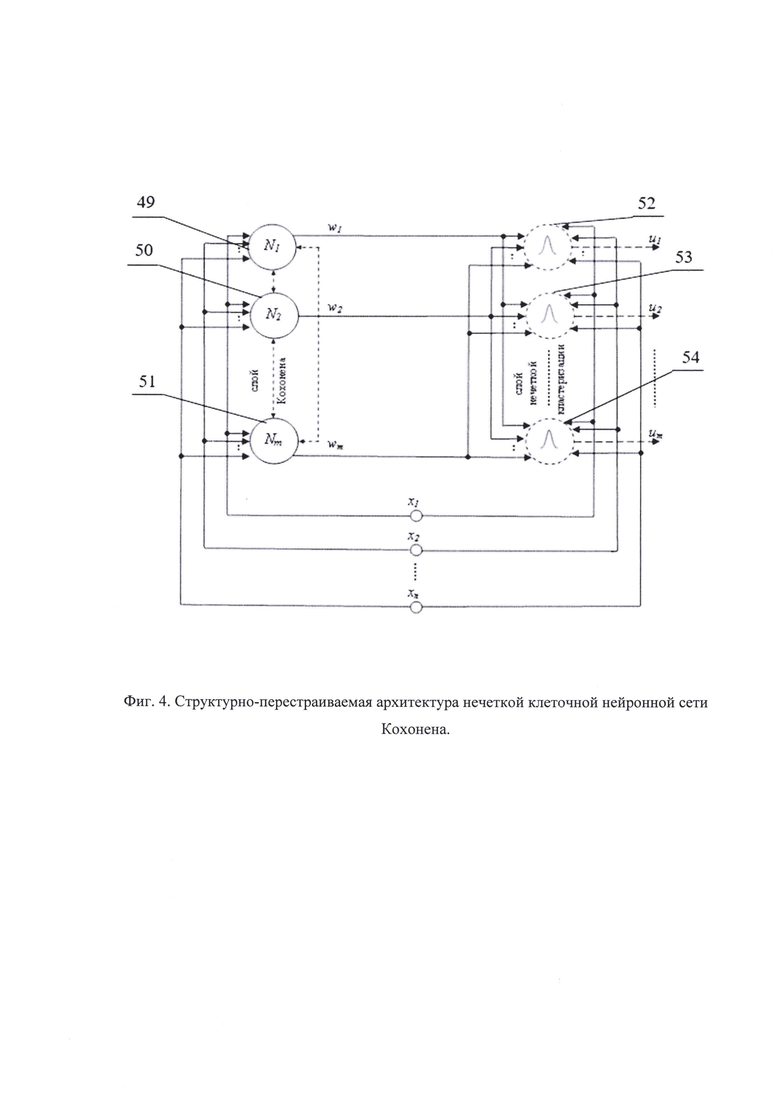
На фиг. 4 дана структурно-перестраиваемая архитектура нечеткой клеточной нейронной сети Кохонена.
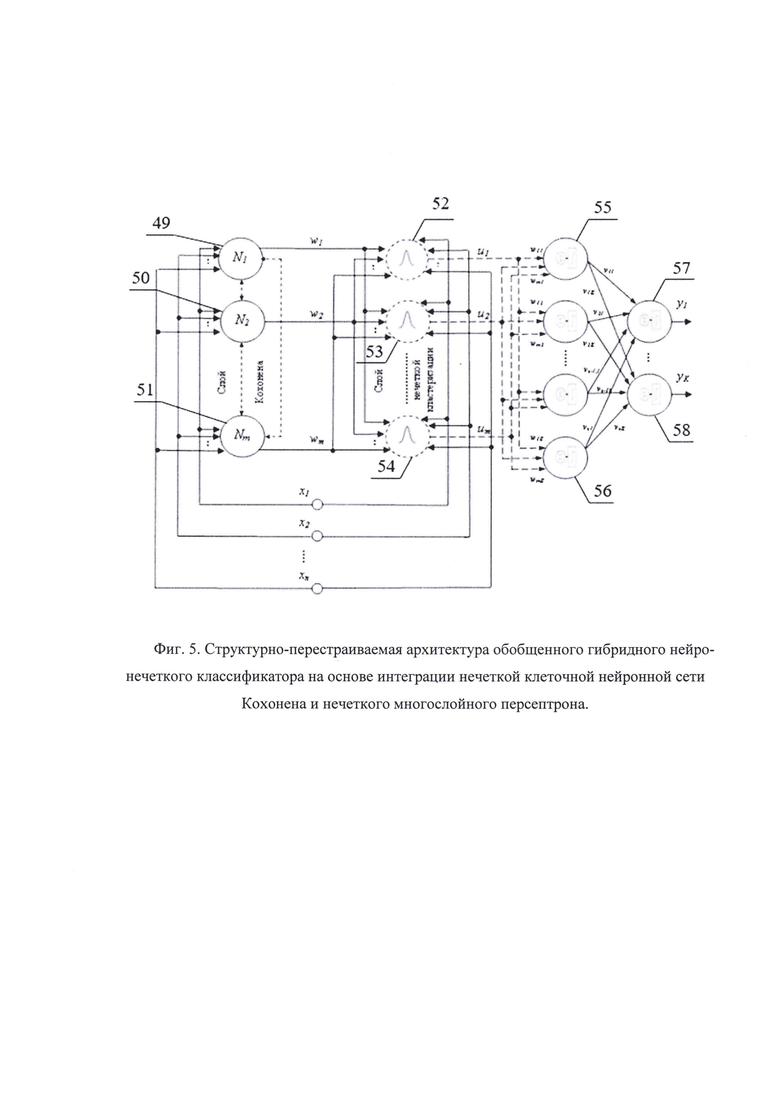
На фиг. 5 представлена структурно-перестраиваемая архитектура обобщенного гибридного нейро-нечеткого классификатора на основе интеграции нечеткой клеточной нейронной сети Кохонена и нечеткого многослойного персептрона.
Трубопроводный диагностический робот состоит из следующих блоков (фиг. 1):
1 - аэродинамическая платформа АП;
2 - материнская платформа МП;
3 - привод ведущего колеса;
4 - контроллер управления приводом движения;
5 - контроллер управления приводами стабилизации и поддерживающего колеса;
6 - аэропривод горизонтальной стабилизации левый АГСЛ;
7 - тактильный датчик;
8 - поддерживающее колесо с приводом поддерживающего колеса;
9 - аэропривод горизонтальной стабилизации правый АГСП;
10 - микроконтроллер управления МУ;
11 - нейро-распознаватель HP;
12 - блок распознавания химических утечек БРХУ;
13 - сигнализатор химических утечек СХУ;
14 - блок разметки повреждений БРП;
15 - блок устранения утечек БУУ;
16 - автопилот;
17 - гироскоп;
18 - акселерометр;
19 - блок стабилизации БС;
20 - блок управления навесным оборудования БУНО;
21 - локатор;
22 - прибор радиационной и химической разведки ПРХР;
23 - высотомер;
24 - магнитометр;
25 - цветная 3D видеокамера ЦВ;
26 - анализатор звука АЗ;
27 - прибор ночного видения ПНВ;
28 - тепловизор с блоком подсветки;
29 - первый приемопередатчик ППП;
30 - второй приемопередатчик ВПП;
31 - компьютеризованное рабочее место инженера КРМИ;
32 - компьютеризованное рабочее место пилота КРМП;
33 - цифровой блок телеметрии ЦБТ;
34 - антенный блок с автотрекером АБА;
35 - блок шифрования БШ;
36 - универсальный пульт управления роботом УПУР;
37 - определитель координат (GPS, ГЛОНАСС) ОК;
38 - измеритель толщины трубы ИТТ;
39 - универсальный стационарный блок питания УСБП;
40 - универсальный мобильный блок питания УМБП;
41 - боковые колеса.
Заявленное устройство функционирует как трубопроводный диагностический робот и работает в двух режимах:
1) подготовки эталонного изображения и формирования программы работы;
2) выполнения заданных диагностических операций.
В первом режиме через универсальный пульт управления УПУР 36 включаются все блоки ТДР и с помощью компьютеризированного рабочего места инженера КРМИ 31 через блок шифрования 35, первый и второй приемо-передатчики 29, 30 в память микроконтроллера управления МУ 10 вводится программа работы устройства и эталонные изображения (ЭИ) диагностируемой трубы и местности. Эталонные изображения формируются, во-первых, в виде электронной карты местности и трубы методом тестированного проезда ТДР по трубе, которую в дальнейшем планируется периодически диагностировать, во-вторых, методом математического и компьютерного моделирования или средствами системы ГЛОНАСС [4, 5]. В процессе подготовки ЭИ включается материнская платформа МП 2 и с помощью аэродинамической платформы АП 1 начинается движение по исследуемой трубе. Управляют движением системы МП 2 - АП 1 осуществляют с помощью контроллера управления приводом движения КУПД 4, подающего сигнал на привод ведущего колеса ПВК 3, который обеспечивает движение ТДР вперед/назад по трубе. Горизонтальное положение на трубе обеспечивают гироскоп 17, поддерживающее колесо ПК 8 и аэроприводы горизонтальной стабилизации левый АГСЛ 6 и правый АГСП 9. АГСЛ 6 и АГСП 9 осуществляют горизонтальную стабилизацию с помощью пропеллеров 45, работающих раздельно (см. фиг. 2). АГСЛ 6 и АГСП 9 управляются микроконтроллером управления МУ 10 через контроллер управления приводами стабилизации и поддерживающего колеса КУПС 5.
В процессе подготовки ЭИ воспринимается и фиксируется визуальная и иная информация об окружающей среде цветной 3D видеокамерой ЦВ 25, тепловизором 28, прибором ночного видения ПНВ 27, локатором 21, прибором радиационной и химической разведки ПРХР 22, а также фиксируется информация от измерителя толщины трубы ИТТ 38, высотомера 23, магнитометра 24, анализатор звука АЗ 26 и определителя координат GPS/ГЛОНАСС ОК 37. Информация из локатора 21 через блок управления навесным оборудованием 20 поступает на микроконтроллер управления 10. При этом блок БУНО 20 по сигналам от МУ 10 управляет таким оборудованием, как высотомер 23, анализатор звука 26, тепловизор 28, ПНВ 27, ПНВ 27, ИТТ 38, магнитометр 24, локатор 21, ПРХР 22 и ОК 37. Кроме того, в режиме подготовки эталонного изображения определяют навигационные параметры от гироскопа 17 и акселерометра 18, фиксируют координаты и скорость движения системы МП2 - АП1 [6]. Управляет работой гироскопа 17 и акселерометра 18 блок стабилизации БС 19 по сигналам от МУ 10. При использовании заданной программы включается автопилот 16, управляющий движением системой МП 2 - АП 1 по заданной траектории. Для исключения перехвата информации сторонними объектами используется блок шифрования 35, который шифрует информацию. Управляет работой ТДР оператор с помощью компьютеризированного рабочего места пилота КРМП 32, а вся информация отображается на дисплее компьютеризированного рабочего места инженера КРМИ 31. Информация на КРМП 32 и КРМИ 31 обрабатывается и отображается с помощью цифрового блока телеметрии ЦБТ 33. Для надежной связи используется антенный блок с автотрекером АБА 34, реализующий узконаправленный электронный пучок. В анализатор звука 26 записывается эталонная звуковая информация. На этом этап подготовки ЭИ заканчивается.
Во втором режиме функционирования ТДР (режим диагностики) все вышеперечисленные блоки работают аналогично этапу подготовки ЭИ, за исключением вновь введенных следующих операций. Включаются в работу нейро-распознаватель HP 11, обеспечивающий анализ и распознавание характеристик трубы и окружающей среды, микроконтроллер управления МУ 10, накапливающий и анализирующий информацию и строящий стратегию выполнения поставленной задачи ТДР. При работе нейро-распознавателя 11 сравниваются ЭИ (эталонные изображения) и ТИ (текущее изображение); ТИ через микроконтроллер МУ 10 и БУНО 20 воспринимается датчиками информации (приборами съема информации и передачи ее потребителю 21, 22, 23, 24, 25, 26, 27, 28, 38). Нейро-распознаватель HP 11 функционирует, используя нейро-нечеткие методы [7]. МУ 10 реализован известными средствами и выполняет операции вычисления, синхронизации, управления и хранения, например, содержит оперативное запоминающее устройство, блок памяти, блок вычислений и задатчик сигналов управления [8]. В процессе работы предлагаемого устройства диагностируется как труба трубопровода, так и окружающая территория на случай появления вредных выбросов из трубы или из других источников. Анализатор звука 26, функционирующий аналогично нейро-распознавателю 11, распознает звук, например, аварийный сигнал или звук опасных воздействий - взрывы, механические повреждения трубопровода. Кроме этого, с помощью ИТТ 38 оценивается толщина трубы, и данная информация передается в нейро-распознаватель HP для определения критического состояния трубопровода. С помощью блока распознавания химических утечек БРХУ 12 определяется место утечек, которое блоком разметки повреждений БРП 14 отмечается красителем, о чем оператор сигнализируется звуком или визуально на экране КРМИ 31. БРП 14 выполнен в виде управляемого пульверизатора, содержит собственно пульверизатор и механизм нажатия кнопки пульверизатора [9]. В случае необходимости блок устранения утечек БУУ 15 устраняет трещины (механические повреждения, царапины, пробои) путем ее заливки химическим веществом, например, композитом, цементным раствором. БУУ 15 выполнен аналогично БРП 14.
При движении ТДР по трубе возможны препятствия, о чем сигнализирует тактильный датчик ТД 7, цветная 3D видеокамера ЦК 25, тепловизор 28 и локатор 21. В этом случае ТДР перемещается через препятствия, используя пропеллеры, ведущее колесо, поддерживающее колесо. Кроме этого, проводится радиационный и химический контроль окружающей среды с помощью ПРХР 22, а также определяются места установки взрывчатых веществ с помощью магнитометра 24 [9, 10]. Вся полученная информация запоминается и отображается на экранах КРМИ 31 и КРМП 32. Кроме электронного отображения информации об опасных местах производится ее электронная разметка на экранах и в памяти КРМИ 31 и КРМП 32. В случае необходимости оператор с помощью КРМП 32 переводит функционирование заявленного устройства в автоматизированный/ручной режим работы.
Универсальный мобильный блок питания УМБП 40, осуществляющий электропитание мобильной части предлагаемого устройства, может состоять из аккумулятора, блока подзарядки на основе комплектации солнечной батареей и ветряным мини энергоблоком. Универсальный стационарный блок питания УСБП 39 может быть выполнен в виде выпрямителя переменного тока, стабилизатора, аккумулятора, блока подзарядки от блока солнечных батарей и ветряного мини энергоблока.
На фиг. 2 показано размещение трубопроводного диагностического робота на трубе. Здесь показаны следующие блоки:
1 - аэродинамическая платформа АП;
2 - материнская платформа МП;
3 - привод ведущего колеса ПВК;
6 - аэропривод горизонтальной стабилизации левый АГСЛ;
8 - поддерживающее колесо ПК;
9 - аэропривод горизонтальной стабилизации правый АГСП;
41 - боковые колеса;
42 - труба трубопровода;
43 - процессорный блок;
44 - ось;
45 - пропеллеры.
На фиг. 2 показана часть устройства трубопроводного диагностического робота, который с помощью материнской платформы 2 устанавливается на трубе 42. Приводом ведущего колеса 3 и поддерживающего колеса 8 фиксируется высота установления материнской платформы 2 над корпусом трубы 42. Конфигурация материнской платформы 2 и расположение колес соответствуют радиусу (или профилю) трубы 42. Четыре боковых колеса обеспечивают устойчивое положение платформы 2 на трубе 42, включая горизонтальные изгибы трубы. Горизонтальное положение аэродинамической платформы 1 регулируется с помощью аэроприводов горизонтальной стабилизации с пропеллерами, левого 6 и правого 9. Для адаптации материнской платформы 2 к изгибу трубы платформа 2 выполнена из двух частей, соединенных по оси 44. В процессорном блоке 43 размещаются электронные узлы трубопроводного диагностического робота, показанные на структурной схеме фиг. 1. Аэродинамическая платформа 1 может быть выполнена в виде квадрокоптера, гексокоптера или с другим количеством пропеллеров. При движении системы МП2 - АП1 по трубе, имеющей наклон к горизонту, с помощью блоков 17, 18, 19, 21, 25, 10 определяется угол наклона трубы к горизонту, затем движение робота задается с помощью средств перемещения 3, 8, 45 (см. фиг. 2).
На фиг. 3 приведена схема положения трубопроводного диагностического робота на изгибе трубы 42. Здесь ТДР, включающий материнскую платформу 2, перемещается по изгибу трубы 42, опираясь на боковые колеса 41. При этом ТДР адаптируется к изгибу трубы за счет поворота передней части 47 материнской платформы 2 вокруг оси 44 относительно задней части 48 материнской платформы 2. Горизонтальная стабилизация поддерживается пропеллерами 45 (см. фиг. 2).
Заявителем разработаны нейро-нечеткие методы в интеллектуальных системах обработки и анализа многомерной информации. Нейро-распознаватель 11 основан на архитектуре обучения и распознавания образов обобщенного гибридного нейро-нечеткого классификатора путем интеграции нечеткой клеточной нейронной сети Кохонена с нечетким многослойным персептроном [7, 11, 12].
При разработке нейро-распознавателя решены следующие задачи:
- Исследованы структурные и функциональные возможности и ограничения отдельных классов нечетких моделей, нейронных сетей и их композиций, доминирующих при анализе многомерных сложнопостроенных данных.
- Предложена схема интеграции высокопроизводительных клеточных нейронных сетей Кохонена с нечеткими методами с целью уменьшения погрешности многомерной кластеризации пересекающихся данных.
Архитектура обучения нечеткой клеточной нейронной сети Кохонена (FCNN-SOM) приведена на фиг. 4. Здесь использованы следующие обозначения:
49, 50, 51 - слои нейронов Кохонена N1, N2, Nm;
52, 53, 54 - слои нечеткой кластеризации.
Обучение нейронной сети включает следующие этапы.
Этап 1. Центрирование и стандартизация данных на гиперкуб [-1; 1]n.
Этап 2 (инициализация начального состояния нейронов сети) заключается в постепенном втягивании активными нейронами неактивных нейронов в нормированный гиперкуб пространства учебных образцов. Для этого все нейроны помещаются в произвольную точку на гиперсфере достаточно большого радиуса  центр которой совпадает с центром пространства учебных образцов (n - размерность пространства учебных образцов).
центр которой совпадает с центром пространства учебных образцов (n - размерность пространства учебных образцов).
Этап 3 - обучение слоя Кохонена клеточным автоматом КА. КА переходит в новое состояние один раз в конце каждой эпохи, после подачи на входы сети всех учебных образцов. Любой 1-й нейрон слоя Кохонена в итерациях эпохи может изменить свой многомерный вектор состояния в двух случаях - нейрон стал победителем или нейрон является соседом другого победившего нейрона.
Разработана концептуальная нейрокогнитивная схема анализа и интерпретации многомерных сложнопостроенных данных (см. фиг. 4), основанная на двух способах представления знаний: экстенсиональном (распознавание обобщенных образов) и интенсиональном (выделение интегральных признаков классов) [7]. На ее основе разработана архитектура и схема обучения обобщенного гибридного нейро-нечеткого классификатора на основе интеграции нечеткой клеточной нейронной сети Кохонена с нечетким многослойным персептроном. Интеграция нечеткой клеточной нейронной сети Кохонена с нечетким многослойным персептроном является известной (Энциклопедия кибернетики. Киев, Главная редакция Украинской Советской энциклопедии. Т2. 1974. стр. 156-158), и реализована в изобретении в виде нейро-распознавателя 11 (фиг. 5).
На фиг. 5 даны следующие обозначения:
55, 56 - скрытые слои многослойного персептрона;
57, 58 - выходные слои FCNN-SOM-FMLP.
Преимуществом предлагаемого устройства перед известным является то, что его оборудование позволяет автоматически управлять роботом при перемещении по трубе с горизонтальной стабилизацией, определять тип и место химических утечек, обнаруживать и устранять место утечки, определять и преодолевать препятствие, оценивать свое пространственное положение и скорость движения, получать и распознавать информацию о химической и радиационной обстановке, определять места взрывчатых веществ, электронно размечать опасные места трубопровода и обеспечивать длительное автономное функционирование робота.
Преимущество достигается за счет улучшения технических характеристик по сравнению с ближайшим аналогом [3], а именно:
1. Повышается точность определения координат местоположения трубопроводного диагностического робота за счет введения определителя координат 37, высотомера 23, гироскопа 17, акселерометра 18, блока стабилизации 19, нейро-распознавателя 11, микроконтроллера управления 10, автопилота 16, цветной 3D видеокамеры 27, тепловизора 28, прибора ночного видения 27 и блока управления навесным оборудованием 20. Высокая точность местоположения робота достигается более высокой точностью оценки координат трубопроводного диагностического робота и использования дополнительной информации при сравнении текущего и эталонного изображений.
2. Улучшается маневренность за счет возможностей перемещения по трубе и воздушного преодоления препятствий.
3. Обеспечиваются автоматический и автоматизированный режим управления трубопроводным диагностическим роботом. Автоматизированный режим осуществляется оператором с помощью универсального пульта управления роботом 36, компьютеризированного рабочего места пилота 32 и компьютеризированного рабочего места инженера 31. Автоматический (автономный) режим выполняется по автоматической программе, записанной в память микроконтроллера управления 10, и при ее адаптации в процессе работы (подстройке программы и параметров с учетом информации от нейро-распознавателя 11, автопилота 16 и другой текущей информации, поступающей в микроконтроллер управления 10).
4. Расширяются функциональные возможности трубопроводного диагностического робота, заключающиеся, во-первых, в возможности перемещения по трубе за счет привода ведущего колеса 3, боковых колес 41, поддерживающего колеса 8, аэродинамической платформы 1, аэроприводов горизонтальной стабилизации левого 6 и правого 9, в способности перемещения по наклонной и горизонтальной поверхности трубы, распознавания и обхода препятствий путем использования цветной 3D видеокамеры 25, тепловизора 28, прибора ночного видения 27, локатора 21, высотомера 23 и нейро-распознавателя 11, колес 3, 8, 41 и пропеллеров 45, в-третьих, в обеспечении поиска взрывчатых веществ, разметки опасных мест и оценки окружающей среды и помощью магнитометра 24 (миноискателя), прибора радиационной и химической разведки 22; в-четвертых, в отмечании на электронной карте местности заминированных, химически и радиационно опасных участков и других опасных объектов (техники, препятствий и др.), в-пятых, устранения повреждений (трещины, пробои, царапины) на трубе с помощью блока устранения утечек 15.
5. Повышается быстродействие и оперативность выполнения заданных операций трубопроводным диагностическим роботом за счет реализации параллельных гибридных нейро-нечетких вычислений, анализа и обработки многомерной информации, в т.ч. 3D изображений, выполнения автоматического и автоматизированного режимов работы.
6. Увеличивается длительность автономного режима работы за счет использования универсального мобильного блока питания 40 и универсального стационарного блока питания 39, которые имеют систему подзарядки.
7. Улучшается удобство обслуживания трубопроводного диагностического робота за счет дополнительно введенных компьютеризированных рабочих мест пилота 32 и инженера 31, выполнения автоматического и автоматизированного режимов управления трубопроводным диагностическим роботом, предоставления различной информации о функционировании трубопроводного диагностического робота и состоянии внешней среды, а также быстрой сборки, разборки и транспортировки трубопроводного диагностического робота.
8. Обеспечивается безопасность функционирования трубопроводного диагностического робота путем использования различной информации о состоянии внешней среды (блоки 20-28), распознавания объектов внешней среды нейро-распознавателем 11 и выработки безопасных управляющих движений микроконтроллером управления 10.
9. Обеспечение собственной информационной безопасности трубопроводного диагностического робота, осуществляемой блоком шифрования 35.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Schroder Singa 100 [Электронный ресурс. Обращение - июль, 2018 г.]. URL: http://robotrends.ru/pub/1629/v-kitae-nachali-primenyat-dlya-kontrolya-vodostokov-besprovodnyy-robot-krauler.
2. Наземный дрон для проверки трубопроводов, FW 150 L series [Электронный ресурс. Обращение - июль, 2018 г.]. URL: http://www.directindustry.com.ru/prod/r-drone/product-161446-1724782.html.
3. Наземный дрон HYRA [Электронные ресурсы. Обращение - июль, 2018 г.]. URL: http://www.directindustry.com.ru/prod/ritec-rohr-inspektions-technik-gmbh/product-91489-1731284.html; https://www.ritec-tv.de/en/product-details/fw-90-1-option-53354.html.
4. Сырямкин В.И., Соломонов Ю.С. и др. Способ управления движущимся объектом и устройство для его осуществления. Патент на изобретение РФ №2476825 от 10.03.2011. Публ. 27.02.2013. Бюл. №6.
5. Сырямкин В.И., Шидловский B.C. Корреляционно-экстремальные радионавигационные системы. Томск: Изд-во Том. ун-та, 2010. - стр. 73-183.
6. Ориентация и навигация подвижных объектов: современные информационные технологии / Под ред. Б.С. Алешина и др. - М.: Физматлит, 2006. - 424 с.
7. Абрамова Т.В., Ваганова Е.В., Горбачев С.В., Сырямкин В.И., Сырямкин М.В. Нейро-нечеткие методы в интеллектуальных системах обработки и анализа многомерной информации. - Томск: Изд-во Том. ун-та. 2014 - 442 с. (см. стр. 9-71, 338-434).
8. Контроллер ATmega328 [Электронный ресурс. Обращение - июль, 2018 г.]. URL: https://prototype.org.ua/handbook/microchips/microcontrollers/avr/megaavr/atmega328.
9. Измерители и анализаторы [Электронный ресурс]. URL: https://goo.gl/tk8ELV.
10. Все о металлоискателях и металлодетекторах. Принцип работы [Электронный ресурс. Обращение - июль, 2018 г.]. URL: http://perstni.corn/magazine/metalloiskateli/printsip-raboti-metalloislkatelya.html.
11. Энциклопедия кибернетики. Киев, Главная редакция Украинской Советской энциклопедии. Т2. 1974. стр. 156-158.
12. Горбачев С.В. и др. Физическая интерпретация обучения нейронов в нечетких кластеризующих сетях при использовании микротомографии в медико-биологических исследованиях. Вестник ВолгГМУ. Выпуск 3(36), 2017.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗМЕТКИ УЧАСТКОВ ТЕРРИТОРИИ С ХИМИЧЕСКИМ И РАДИОАКТИВНЫМ ЗАРАЖЕНИЕМ | 2017 |
|
RU2661295C1 |
| РОБОТ ДЛЯ ДИАГНОСТИКИ И РЕМОНТА ТРУБОПРОВОДНОГО ТРАНСПОРТА | 2019 |
|
RU2721473C1 |
| КОМПЛЕКС РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫМИ РОБОТАМИ ДЛЯ БОРЬБЫ С МАЛОГАБАРИТНЫМИ БЕСПИЛОТНЫМИ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2019 |
|
RU2717047C1 |
| Комплекс распределенного управления интеллектуальными роботами для борьбы с беспилотными аппаратами | 2024 |
|
RU2838977C1 |
| Универсальный комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами | 2023 |
|
RU2817740C1 |
| АВТОМАТИЧЕСКАЯ СИСТЕМА С НЕЙРО-НЕЧЕТКОЙ СЕТЬЮ ДЛЯ КОМПЛЕКСНОЙ ТЕХНИЧЕСКОЙ ДИАГНОСТИКИ И УПРАВЛЕНИЯ СУДОВОЙ ЭНЕРГЕТИЧЕСКОЙ УСТАНОВКОЙ | 2020 |
|
RU2737457C1 |
| УСТРОЙСТВО ДЛЯ МОНИТОРИНГА СИСТЕМ ЭЛЕКТРИЧЕСКОГО ОБОГРЕВА ТРУБОПРОВОДОВ | 2021 |
|
RU2766373C1 |
| СИСТЕМА САМООБУЧЕНИЯ ИНТЕЛЛЕКТУАЛЬНЫХ АГЕНТОВ УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2023 |
|
RU2821616C1 |
| УНИВЕРСАЛЬНАЯ ПЛАТФОРМА НА МАГНИТНЫХ КОЛЕСАХ ДЛЯ ВНУТРИТРУБНЫХ УСТРОЙСТВ | 2019 |
|
RU2730561C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЗИРОВАННОГО СБОРА ТОМАТОВ | 2022 |
|
RU2796270C1 |

Изобретение относится к устройствам автоматической и автоматизированной диагностики объектов, например газо- и нефтепроводов. Техническим результатом является расширение функциональных возможностей. Робот имеет в своем составе движимую материнскую платформу с боковыми колесами, связанную через контроллер управления приводом движения КУПД с приводом ведущего колеса, видеокамеру, блок подсветки, детектор газа и универсальный пульт управления роботом УПУР. При этом материнская платформа МП 2 оборудована аэродинамической платформой АП 1 с поддерживающим колесом ПК 8, аэроприводом горизонтальной стабилизации левым АГСЛ 6, аэроприводом горизонтальной стабилизации правым АГСП 9 и контроллером управления аэроприводами и приводом поддерживающего колеса КУП 5. Также содержится навесное оборудование обработки информации и управления в составе: микроконтроллер управления МУ 10; нейрораспознаватель HP 11; автопилот 16; определитель координат GPS/ГЛОНАСС ОК 37; блок стабилизации БС 19; гироскоп 17; акселерометр 18; блок управления навесным оборудованием БУНО 20; локатор 21; анализатор звука A3 26; тепловизор 28; прибор ночного видения ПНВ 27; цветная 3D видеокамера ЦВ 25; тактильный датчик ТД 7; измеритель толщины трубы ИТД 38; магнитометр 24; высотомер 23; прибор радиационной и химической разведки ПРХР 22; блок распознавания химических утечек БРХУ 12; сигнализатор химических утечек СХУ 13; блок разметки повреждений БРП 14; блок устранения утечек БУУ 15; первый приемопередатчик ППП 29; второй приемопередатчик ВПП 30; блок шифрования БШ 35; антенный блок с автотрекером АБА 34; цифровой блок телеметрии ЦБТ 33; компьютеризированное рабочее место пилота КРМП 32; компьютеризированное рабочее место инженера КРМИ 31; универсальный мобильный блок питания УМБП 40 и универсальный стационарный блок питания УСБП 39. 23 з.п. ф-лы, 5 ил.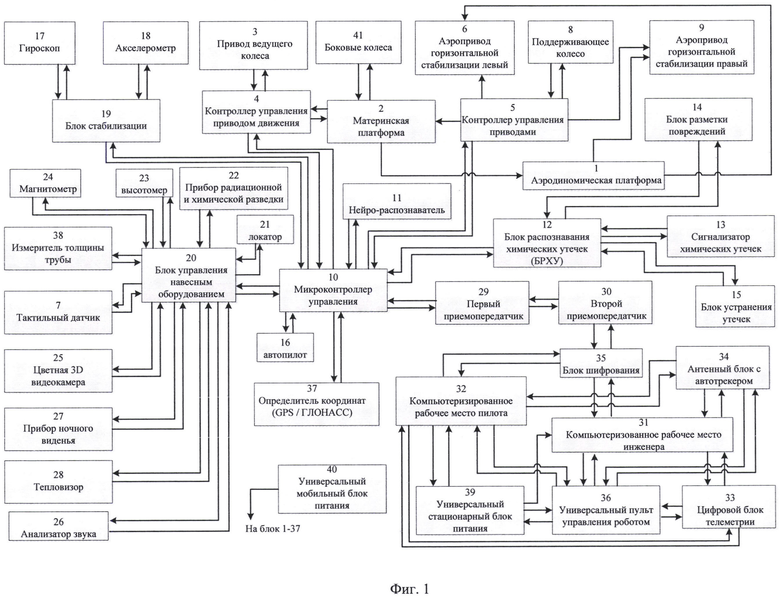
1. Трубопроводный диагностический робот, имеющий в своем составе движимую материнскую платформу с ведущими колесами и приводами ведущих колес, видеокамеру, детектор газа, блок подсветки, пульт управления роботом и источники электропитания,
отличающийся тем, что упомянутая материнская платформа 2 оборудована аэродинамической платформой АП 1, включающей поддерживающее колесо ПК 8 с приводом поддерживающего колеса, аэропривод горизонтальной стабилизации левый АГСЛ 6 с пропеллером 45, аэропривод горизонтальной стабилизации правый АГСП 9 с пропеллером 45, контроллер управления приводом движения 4 и контроллер управления приводами стабилизации и поддерживающего колеса КУПС 5,
а также содержит навесное оборудование получения, обработки информации и управления в составе: микроконтроллер управления МУ 10; нейрораспознаватель HP 11; автопилот 16; определитель координат GPS/ГЛОНАСС ОК 37; блок стабилизации БС 19; гироскоп 17; акселерометр 18; блок управления навесным оборудованием БУНО 20; локатор 21; анализатор звука АЗ 26; тепловизор 28; прибор ночного видения ПНВ 27; цветная 3D видеокамера ЦВ 25; тактильный датчик ТД 7; измеритель толщины трубы ИТД 38; высотомер 23; магнитометр 24; прибор радиационной и химической разведки ПРХР 22; блок распознавания химических утечек БРХУ 12; сигнализатор химических утечек СХУ 13; блок разметки повреждений БРП 14; блок устранения утечек БУУ 15; первый приемопередатчик ППП 29; второй приемопередатчик ВПП 30; блок шифрования БШ 35; компьютеризированное рабочее место инженера КРМИ 31; компьютеризированное рабочее место пилота КРМП 32; цифровой блок телеметрии ЦБТ 33; антенный блок с автотрекером АБА 34 и оборудована универсальным стационарным блоком питания УСБП 39 и универсальным мобильным блоком питания УМБП 40; при этом микроконтроллер управления МУ 10 подключен отдельными двунаправленными линиями связи к контроллеру управления приводом движения КУПД 4, контроллеру управления приводами стабилизации и поддерживающего колеса КУПС 5, блоку управления навесным оборудованием БУНО 20, определителю координат GPS/ГЛОНАСС ОК 37, автопилоту 16, нейрораспознавателю HP 11, блоку распознавания химических утечек БРХУ 12, к первому приемопередатчику ППП 29 и к блоку стабилизации БС 19; упомянутый блок стабилизации БС 19, в свою очередь, подключен двунаправленными линиями связи к гироскопу 17 и акселерометру 18; упомянутый блок управления навесным оборудованием БУНО 20, в свою очередь, подключен двунаправленными линиями связи к прибору радиационной и химической разведки ПРХР 22, высотомеру 23, магнитометру 24, измерителю толщины трубы ИТТ 38, тактильному датчику ТД 7, цветной 3D видеокамере ЦВ 25, прибору ночного видения ПНВ 27, тепловизору 28, анализатору звука АЗ 26 и локатору 21; упомянутый блок распознавания химических утечек БРХУ 12, в свою очередь, соединен двунаправленными линиями связи с сигнализатором химических утечек СХУ 13, блоком разметки повреждений БРП 14 и блоком устранения утечек БУУ 15; упомянутый контроллер управления приводами стабилизации и поддерживающего колеса КУПС 5, в свою очередь, подключен к приводу поддерживающего колеса ПК 8, аэроприводу горизонтальной стабилизации левому АГСЛ 6 и аэроприводу горизонтальной стабилизации правому АГСП 9; упомянутый контроллер КУПД 4, в свою очередь, подключен к приводу ведущего колеса 3, а упомянутые мобильные элементы 1-29, 37, 38 подключены к универсальному мобильному блоку питания УМБП 40, при этом первый приемопередатчик ППП 29 подключен двунаправленной линией связи ко второму приемопередатчику ВПП 30, который, в свою очередь, соединен двунаправленной линией связи с блоком шифрования БШ 35; компьютеризированное рабочее место инженера КРМИ 31 подключено двунаправленными линиями связи к универсальному пульту управления роботом УПУР 36, цифровому блоку телеметрии ЦБТ 33, антенному блоку с автотрекером АБА 34, блоку шифрования БШ 35 и через универсальный пульт управления роботом УПУР 36 связано с компьютеризированным рабочим местом пилота КРМП 32; упомянутое компьютеризированное рабочее место пилота КРМП 32, в свою очередь, подключено двунаправленными линиями связи к антенному блоку с автотрекером АБА 34, цифровому блоку телеметрии ЦБТ 33, блоку шифрования БШ 35 и универсальному пульту управления роботом УПУР 36; упомянутый универсальный пульт управления роботом УПУР 36, в свою очередь, подключен двунаправленными линиями связи к антенному блоку с автотрекером АБА 34 и цифровому блоку телеметрии ЦБТ 33, а упомянутые элементы 30-36 подключены к универсальному стационарному блоку питания 39.
2. Устройство по п. 1, отличающееся тем, что прибор ночного видения выполнен в виде телевизионной камеры, содержащей инфракрасный прожектор и функционирующей в инфракрасном оптическом диапазоне.
3. Устройство по п. 1, отличающееся тем, что тепловизор выполнен в виде телевизионной камеры, воспринимающей и отображающей тепловой портрет объекта контроля.
4. Устройство по п. 1, отличающееся тем, что цветная 3D видеокамера выполнена в виде двух приемников оптического диапазона, которые могут восстанавливать трехмерное цветное изображение объекта контроля.
5. Устройство по п. 1, отличающееся тем, что локатор состоит из сканирующего лучевого излучателя, приемника, отображателя полученной информации и интерфейса связи с потребителем информации.
6. Устройство по п. 1, отличающееся тем, что блок распознавания химических утечек выполнен в виде детектора химических веществ и газа.
7. Устройство по п. 1, отличающееся тем, что сигнализатор химических утечек выполнен в виде звукового и электронного сигнализатора на экране универсального пульта управления.
8. Устройство по п. 1, отличающееся тем, что блок разметки повреждений выполнен в виде пульверизатора с красителем и механизма нажатия кнопки пульверизатора.
9. Устройство по п. 1, отличающееся тем, что блок устранения утечек выполнен в виде пульверизатора с химическим наполнителем и механизмом нажатия кнопки пульверизатора.
10. Устройство по п. 1, отличающееся тем, что блок управления навесным оборудованием содержит синхронизатор включения последовательности работы приборов и блок управления положением приборов съема информации и передачи ее потребителю.
11. Устройство по п. 1, отличающееся тем, что аэроприводы горизонтальной стабилизации левый и правый выполнены в виде двигателя, редуктора, пропеллера и блока крепления к аэродинамической платформе.
12. Устройство по п. 1, отличающееся тем, что контроллер управления приводом движения и контроллер управления приводами стабилизации и поддерживающего колеса выполнены в виде процессора, блока памяти и интерфейса.
13. Устройство по п. 1, отличающееся тем, что микроконтроллер управления выполнен в виде процессора, блока памяти и интерфейса.
14. Устройство по п. 1, отличающееся тем, что первый и второй приемопередатчики выполнены в виде преобразователя, шифратора, дешифратора и усилителя.
15. Устройство по п. 1, отличающееся тем, что универсальный пульт управления содержит процессор, блок памяти, интерфейс и блок ручного управления трубопроводным диагностическим роботом с помощью клавиатуры и джойстика.
16. Устройство по п. 1, отличающееся тем, что компьютеризированное рабочее место пилота выполнено в виде процессора, блока памяти, интерфейса, дисплея и блока ручного управления трубопроводным диагностическим роботом с помощью клавиатуры и джойстика.
17. Устройство по п. 1, отличающееся тем, что компьютеризированное рабочее место инженера выполнено в виде процессора, блока памяти, интерфейса, дисплея, клавиатуры и блока отображения информации.
18. Устройство по п. 1, отличающееся тем, что нейрораспознаватель выполнен в виде структурно-перестраиваемой архитектуры обобщенного гибридного нейронечеткого классификатора на основе интеграции нечеткой клеточной нейронной сети Кохонена и нечеткого многослойного персептрона.
19. Устройство по п. 1, отличающееся тем, что универсальный стационарный блок питания выполнен в виде электрического выпрямителя переменного тока, стабилизатора, аккумулятора и комплексного блока подзарядки на основе солнечной батареи и ветряного мини-энергоблока.
20. Устройство по п. 1, отличающееся тем, что универсальный мобильный блок питания выполнен в виде аккумулятора и комплексного блока подзарядки на основе солнечной батареи и ветряного мини-энергоблока.
21. Устройство по п. 1, отличающееся тем, что прибор радиационной и химической разведки выполнен на основе анализатора химического состава атмосферы.
22. Устройство по п. 1, отличающееся тем, что измеритель толщины трубы выполнен в виде ультразвукового измерителя толщины материала.
23. Устройство по п. 1, отличающееся тем, что тактильный датчик выполнен в виде контактного механического идентификатора.
24. Устройство по п. 1, отличающееся тем, что материнская платформа выполнена составной из двух частей, скрепленных осевым креплением, и при движении на поворотах трубы обеспечивает адаптацию за счет поворота передней части материнской платы в горизонтальной плоскости вокруг центральной оси относительно задней части материнской платы.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476825C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗМЕТКИ УЧАСТКОВ ТЕРРИТОРИИ С ХИМИЧЕСКИМ И РАДИОАКТИВНЫМ ЗАРАЖЕНИЕМ | 2017 |
|
RU2661295C1 |
| Л.А | |||
| Торгашев, В.И Гуцул, С.В | |||
| Романенко | |||
| "Разработка и создание робототехнической платформы повышенной проходимости, как элемент обеспечения ликвидации чрезвычайных ситуаций", 2013 | |||
| US 7656997 B1, 02.02.2010 | |||
| WO 2013098486 A1, 04.07.2013. | |||

